Improving the Geolocation Algorithm for Sensors Onboard the ISS: Effect of Drift Angle

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Method and Data
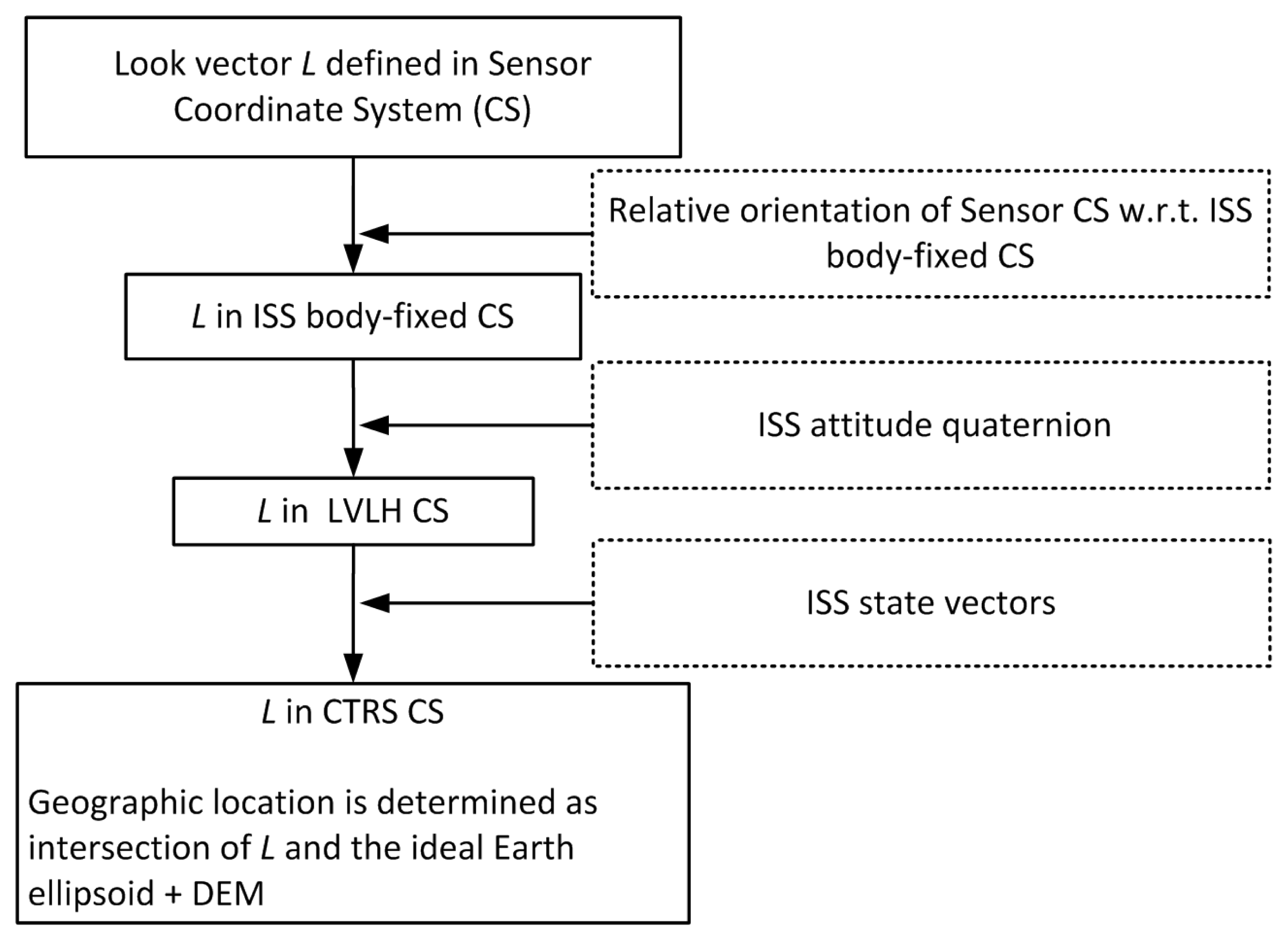
2.1. Geolocation Algorithm
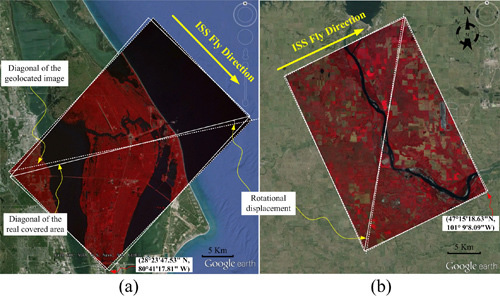
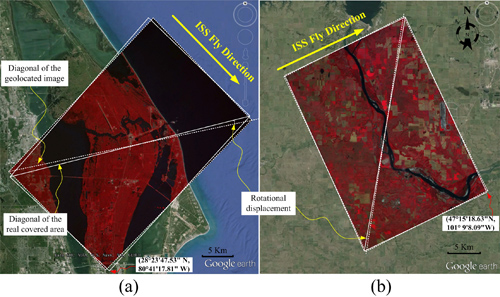
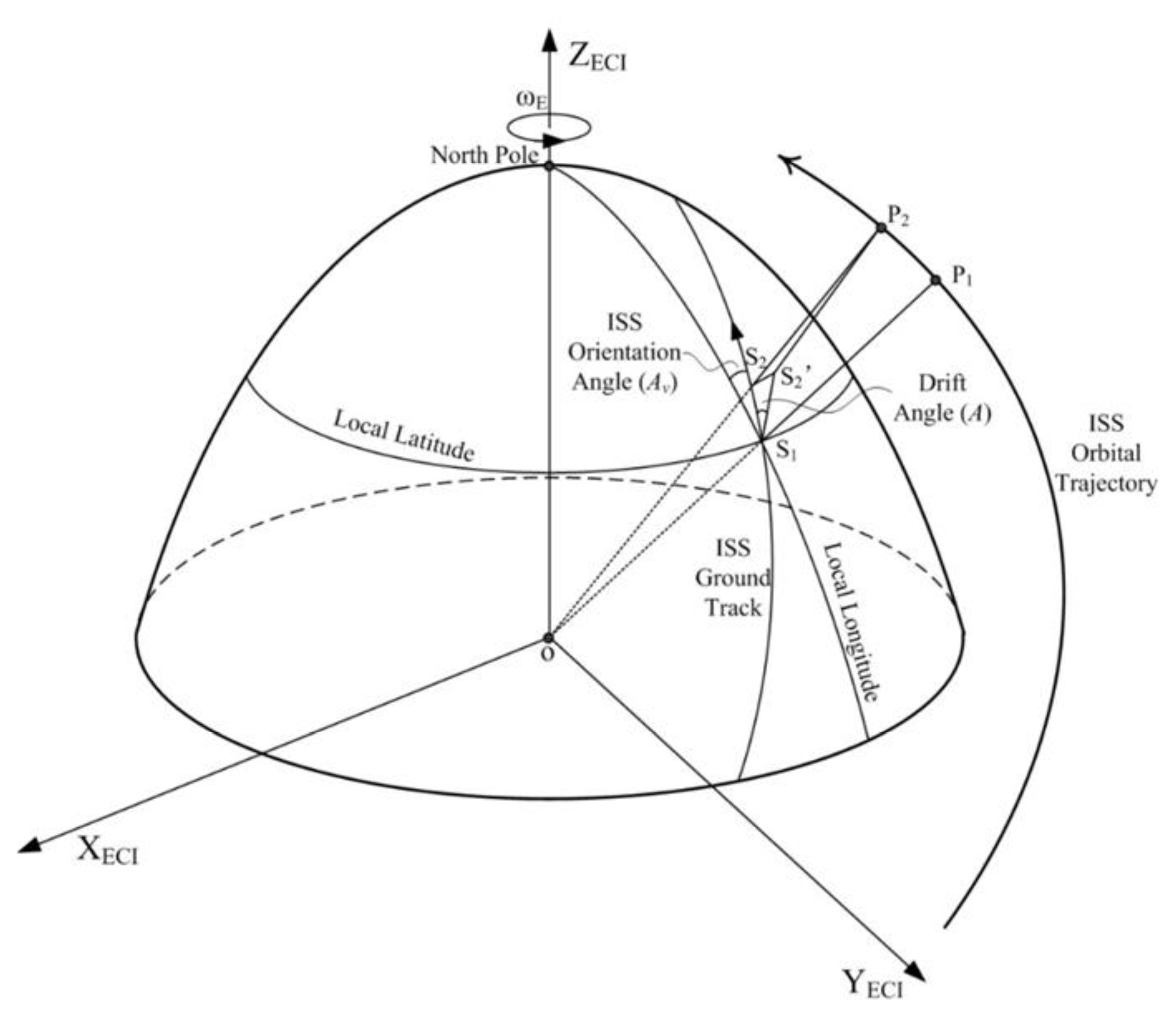
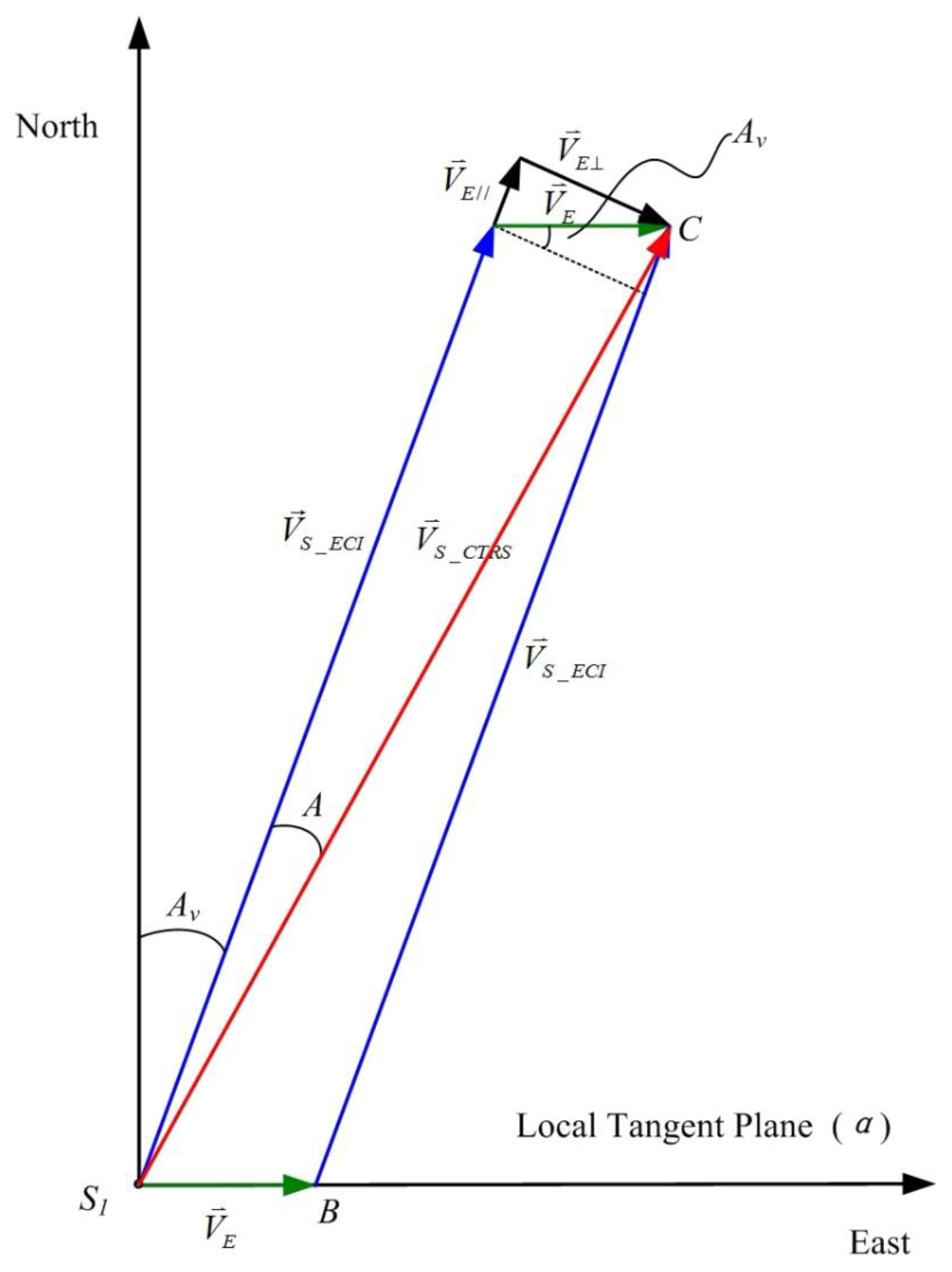
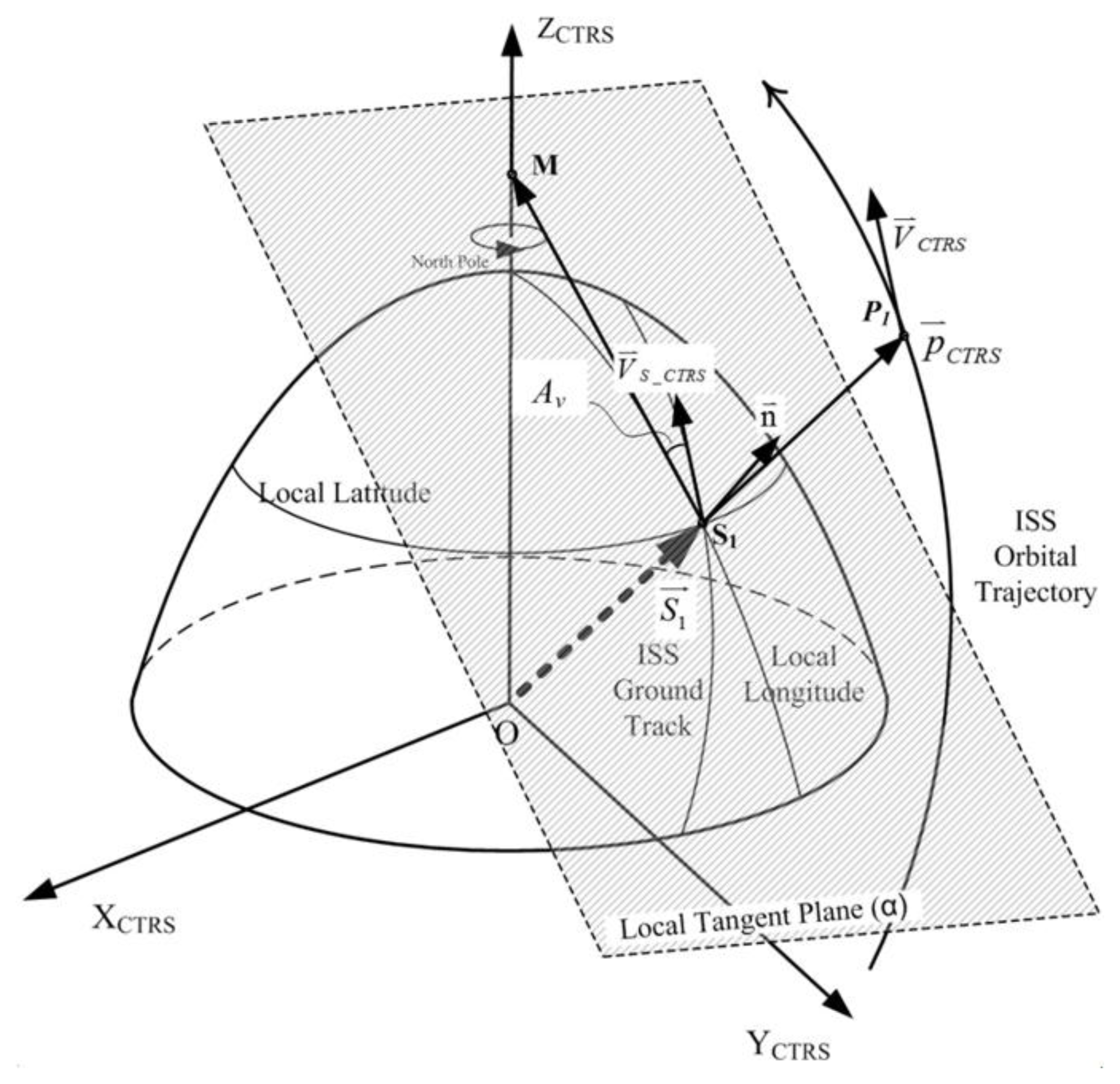
2.2. Drift Angle
2.3. Drift Angle Calculation
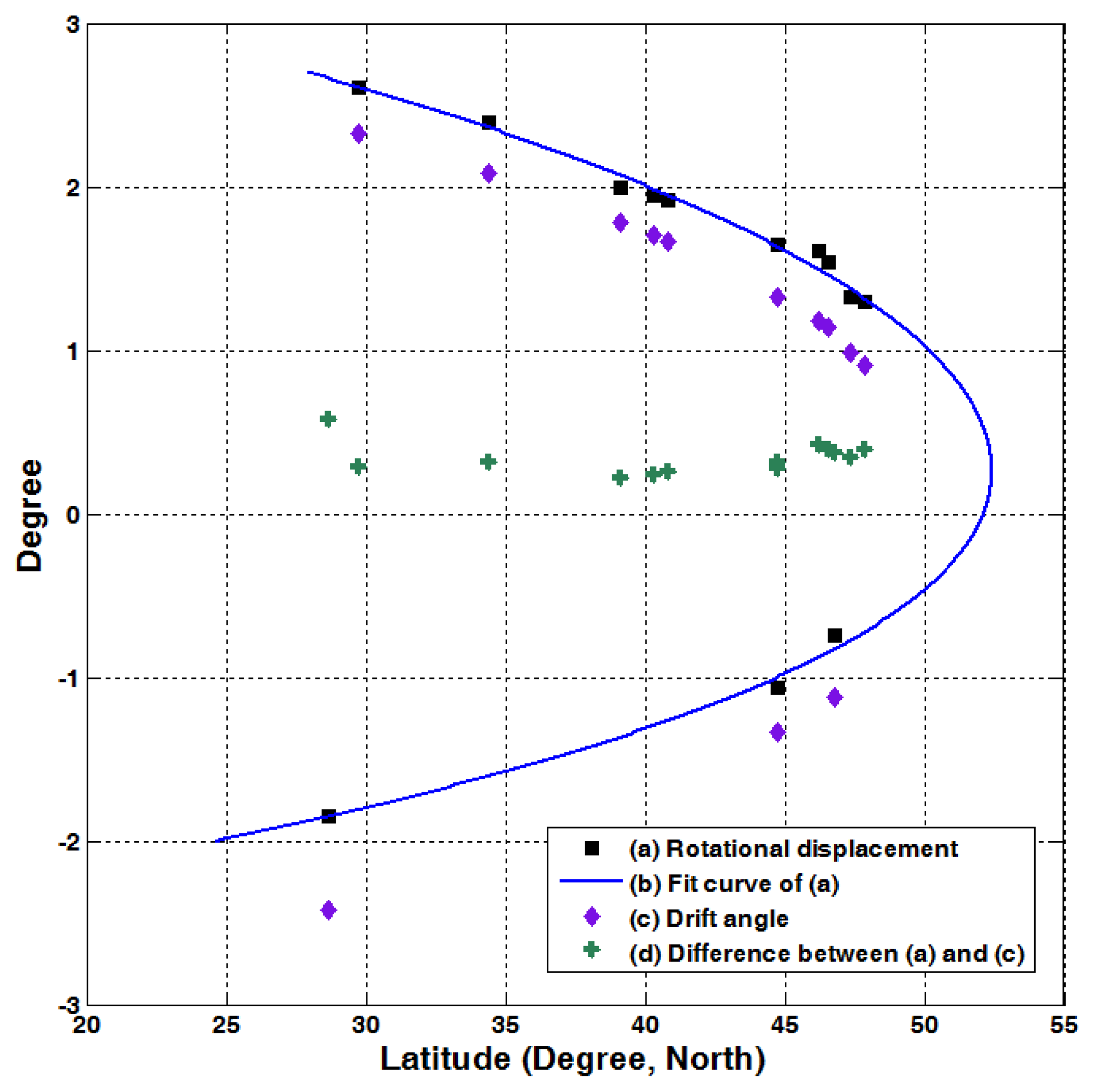
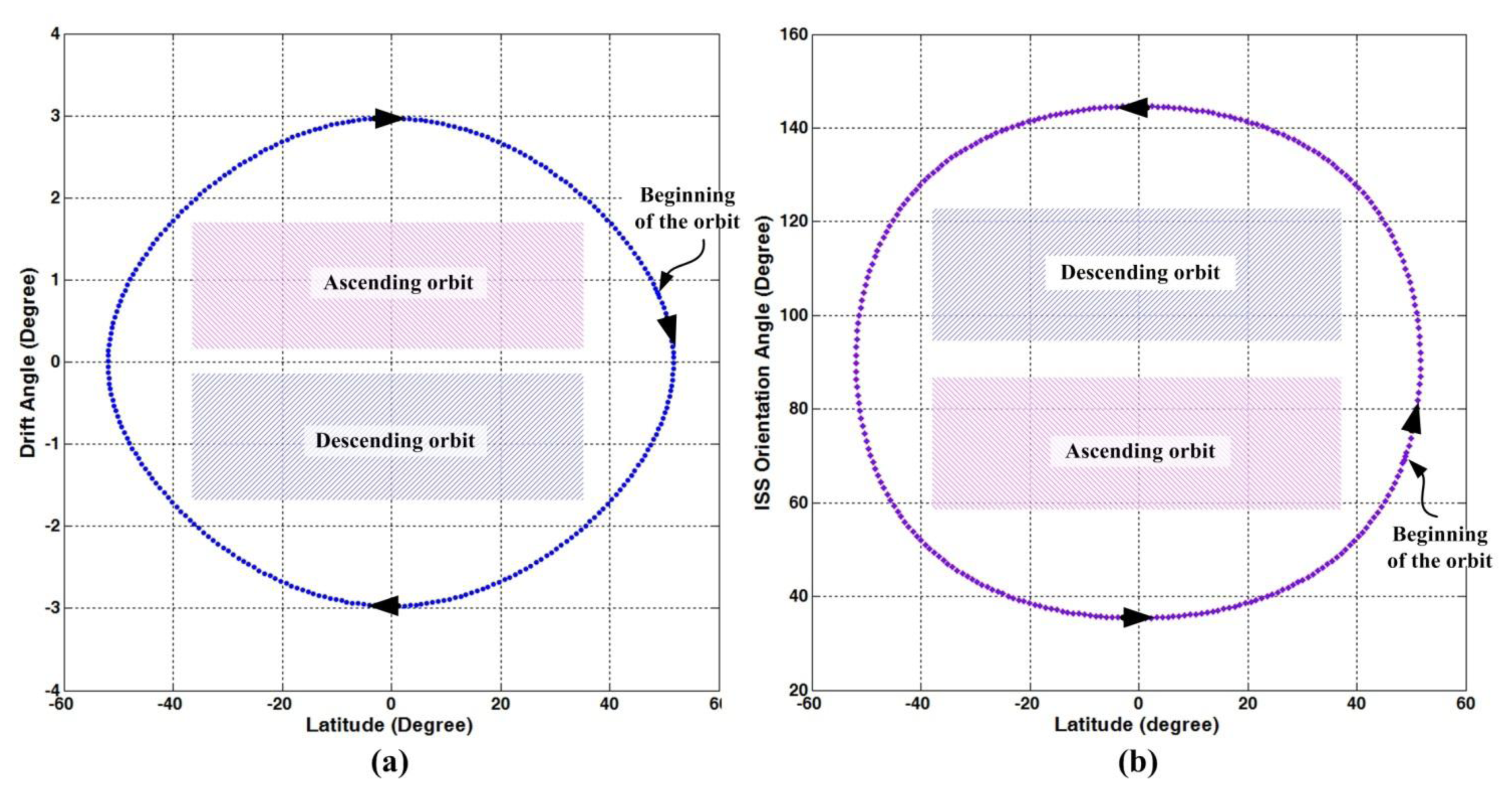
3. Results and Discussion
4. Conclusions
Acknowledgments
Conflicts of Interest
- Author ContributionsHuadong Guo and Xiaodong Zhang designed the study. Changyong Dou conducted the study. Xiaodong Zhang and Changyong Dou wrote the manuscript, developed the drift angle calculation algorithm and carried out the results validation and analysis. Chunming Han and Ming Liu helped with the details of the drift angle calculation.
References
- Gebelein, J.; Eppler, D. How earth remote sensing from the international space station complements current satellite-based sensors. Int. J. Remote Sens 2006, 27, 2613–2629. [Google Scholar]
- Olsen, D.R.; Kim, H.J.; Ranganathan, J.; Laguette, S. Development of a low-cost student-built multi-spectral sensor for the international space station. Proc. SPIE 2011. [Google Scholar] [CrossRef]
- Tank, V.; Oertel, D.; Zhukov, B.; Shreier, F.; Beier, K.; Haschberger, P.; Lorenz, E.; Skrbek, W.; Jahn, H. Focus on Iss-Sensor and Data Fusion for Earth Observation from Space. Proceedings of the 2011 International Conference on Multisensor Fusion and Integration for Intelligent Systems, Baden-Baden, Germany, 20–22 August 2001.
- Jacobson, C.A. International Space Station Remote Sensing Pointing Analysis. Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007.
- Lucke, R.L.; Corson, M.; McGlothlin, N.R.; Butcher, S.D.; Wood, D.L.; Korwan, D.R.; Li, R.R.; Snyder, W.A.; Davis, C.O.; Chen, D.T. Hyperspectral imager for the coastal ocean: Instrument description and first images. Appl. Opt 2011, 50, 1501–1516. [Google Scholar]
- Robinson, J.A.; Amsbury, D.L.; Liddle, D.A.; Evans, C.A. Astronaut-acquired orbital photographs as digital data for remote sensing: Spatial resolution. Int. J. Remote Sens 2002, 23, 4403–4438. [Google Scholar]
- Montenbruck, O.; Gomez, S.F.; Nasca, R.; Cacciapuoti, L. Orbit determination and prediction of the international space station. J. Spacecr. Rocket 2011, 48, 1055–1067. [Google Scholar]
- Dou, C.; Zhang, X.; Kim, H.; Ranganathan, J.; Olsen, D.; Guo, H. Geolocation algorithm for earth observation sensors onboard international space station. Photogramm. Eng. Remote Sens 2013, 79, 625–637. [Google Scholar]
- Ranganathan, J.; Olsen, D.; Semke, W. Passive Vibration Isolation and Absorber System for Earth Imaging from the International Space Station (ISS). In Topics in Modal Analysis II; Springer: New York, NY, USA, 2012; pp. 87–94. [Google Scholar]
- Olsen, D.; Dou, C.; Zhang, X.; Hu, L.; Kim, H.; Hildum, E. Radiometric calibration for Agcam. Remote Sens 2010, 2, 464–477. [Google Scholar]
- Li, Y. Study of the drift angle control in a space camera. Opt. Precis. Eng 2002, 10, 402–406. (In Chinese) [Google Scholar]
- Attema, E.P. The active microwave instrument on-board the ERS-1 satellite. Proc. IEEE 1991, 79, 791–799. [Google Scholar]
- Nagarajan, N.; Jayashree, M.S. Computation of yaw program to compensate the effect of Earth rotation. J. Spacecr. Technol 1995, 5, 42–46. [Google Scholar]
- Seshadri, K.S.V.; Rao, M.; Jayaraman, V.; Thyagarajan, K.; Murthic, K.R.S. Resourcesat-1: Aglobal multi-observation mission for resources monitoring. Acta Astronaut 2005, 57, 534–539. [Google Scholar]
- Wang, Z.; Yuan, J.; Chen, S.; Li, Y. The drift angle of high resolution satellite remote sensing imagery and its compensation. J. Astronuat 2002, 23, 39–42. (In Chinese) [Google Scholar]
- Ghosh, S.K. Image motion compensation through augmented collinearity equations. Opt. Eng 1985, 24. [Google Scholar] [CrossRef]
- Wang, J.; Yu, P.; Yan, C.; Ren, J.; He, B. Space optical remote sensor image motion velocity vector computational modeling. Acta Opt. Sinica 2004, 24, 1585–1589. (In Chinese) [Google Scholar]
- Wolfe, R.E.; Nishama, M.; Fleig, A.J.; Kuyper, J.A.; Roy, D.P.; Storey, J.C.; Patt, F.S. Achieving sub-pixel geolocation accuracy in support of MODIS land science. Remote Sens. Environ 2002, 83, 31–49. [Google Scholar]
- Lichti, D.D.; Kim, C. A comparison of three geometric self-calibration methods for range cameras. Remote Sens 2011, 3, 1014–1028. [Google Scholar]






© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Dou, C.; Zhang, X.; Guo, H.; Han, C.; Liu, M. Improving the Geolocation Algorithm for Sensors Onboard the ISS: Effect of Drift Angle. Remote Sens. 2014, 6, 4647-4659. https://doi.org/10.3390/rs6064647
Dou C, Zhang X, Guo H, Han C, Liu M. Improving the Geolocation Algorithm for Sensors Onboard the ISS: Effect of Drift Angle. Remote Sensing. 2014; 6(6):4647-4659. https://doi.org/10.3390/rs6064647
Chicago/Turabian StyleDou, Changyong, Xiaodong Zhang, Huadong Guo, Chunming Han, and Ming Liu. 2014. "Improving the Geolocation Algorithm for Sensors Onboard the ISS: Effect of Drift Angle" Remote Sensing 6, no. 6: 4647-4659. https://doi.org/10.3390/rs6064647