Atmospheric Corrections for Altimetry Studies over Inland Water


Abstract
:1. Introduction
2. Tropospheric Corrections
2.1. Dry Tropospheric Correction
2.1.1. DTC Estimation
2.1.2. Analysis of DTC Errors Present on Altimetric Products
- (1)
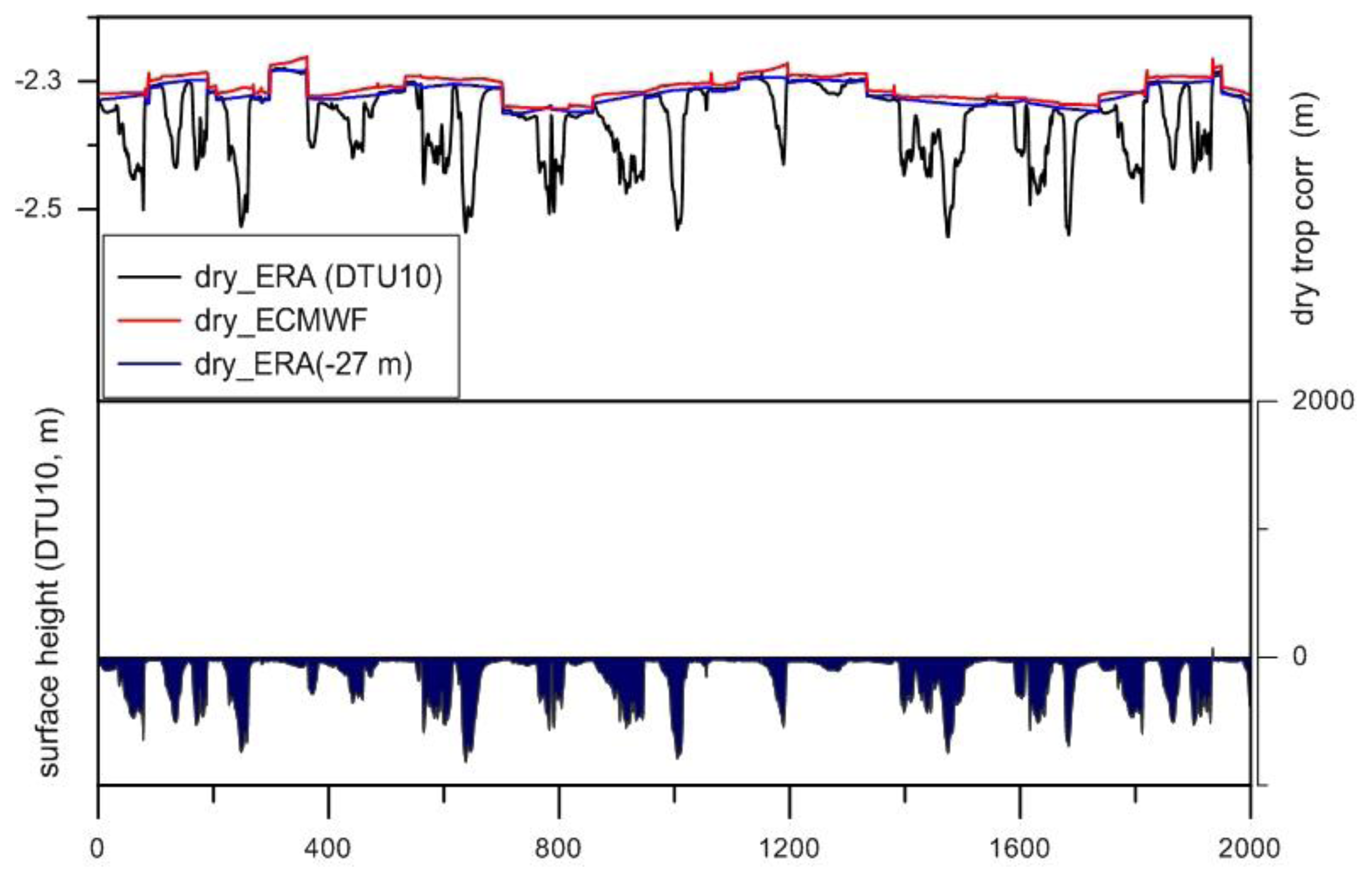
- For ERA Interim and NCEP, for all altimetric missions, the SLP is first interpolated in space and time from the available model grids and then reduced to surface height using Equation (6), while setting hs = 0. The surface height has been extracted from the DTU10 topographic data set, except for the Caspian Sea, where a constant value of −27 m was adopted. DTU10 are upgrades of the corresponding DNSC08 models [47]. The DTU10 topographic data set contains topographic information as follows: over land and most inland water regions, it contains the surface height above the geoid as modeled by a digital elevation model (DEM), while over oceans and over the Caspian Sea, it possesses bathymetric information.
- (2)
- For the ECMWF operational model, the DTC values are those extracted from the GDR products of each altimeter mission, without any modification, except for CryoSat-2, for which the correction has been computed from the model grids using the same procedure as in (1). For Geosat and GFO, only the DTC from ERA Interim and NCEP models are available. For T/P, J1 and J2, the AVISO GDRs have been used.
- (1)
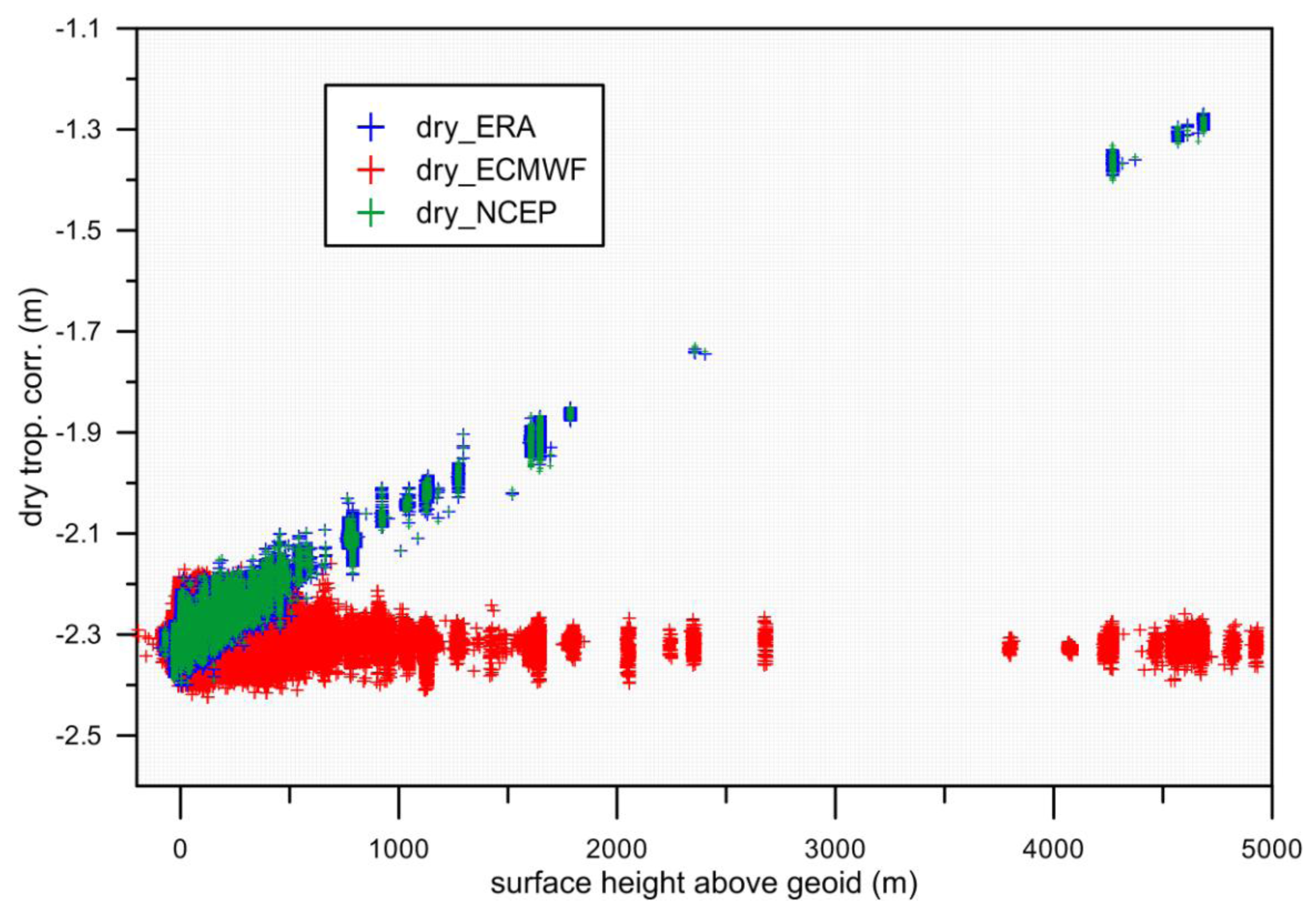
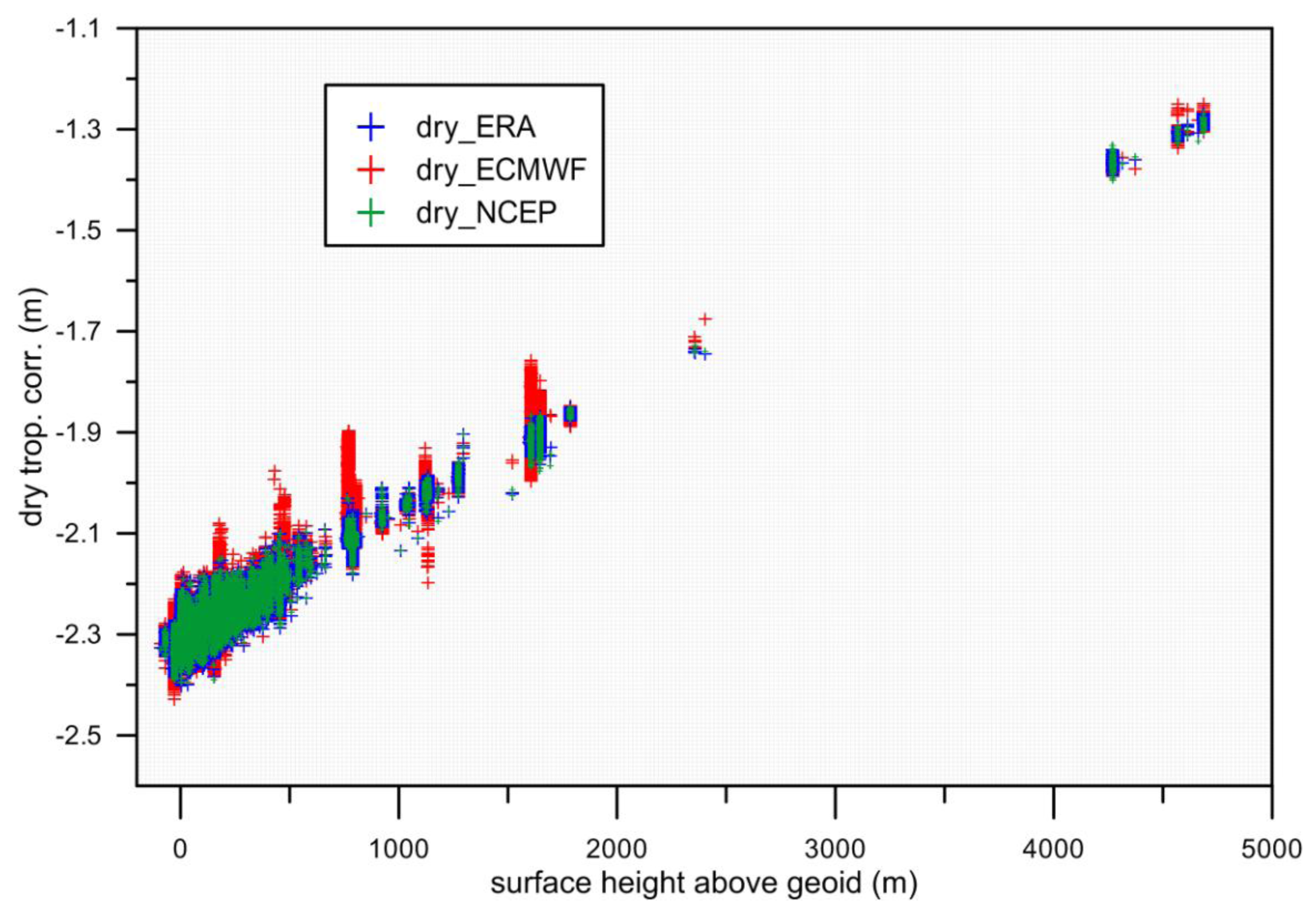
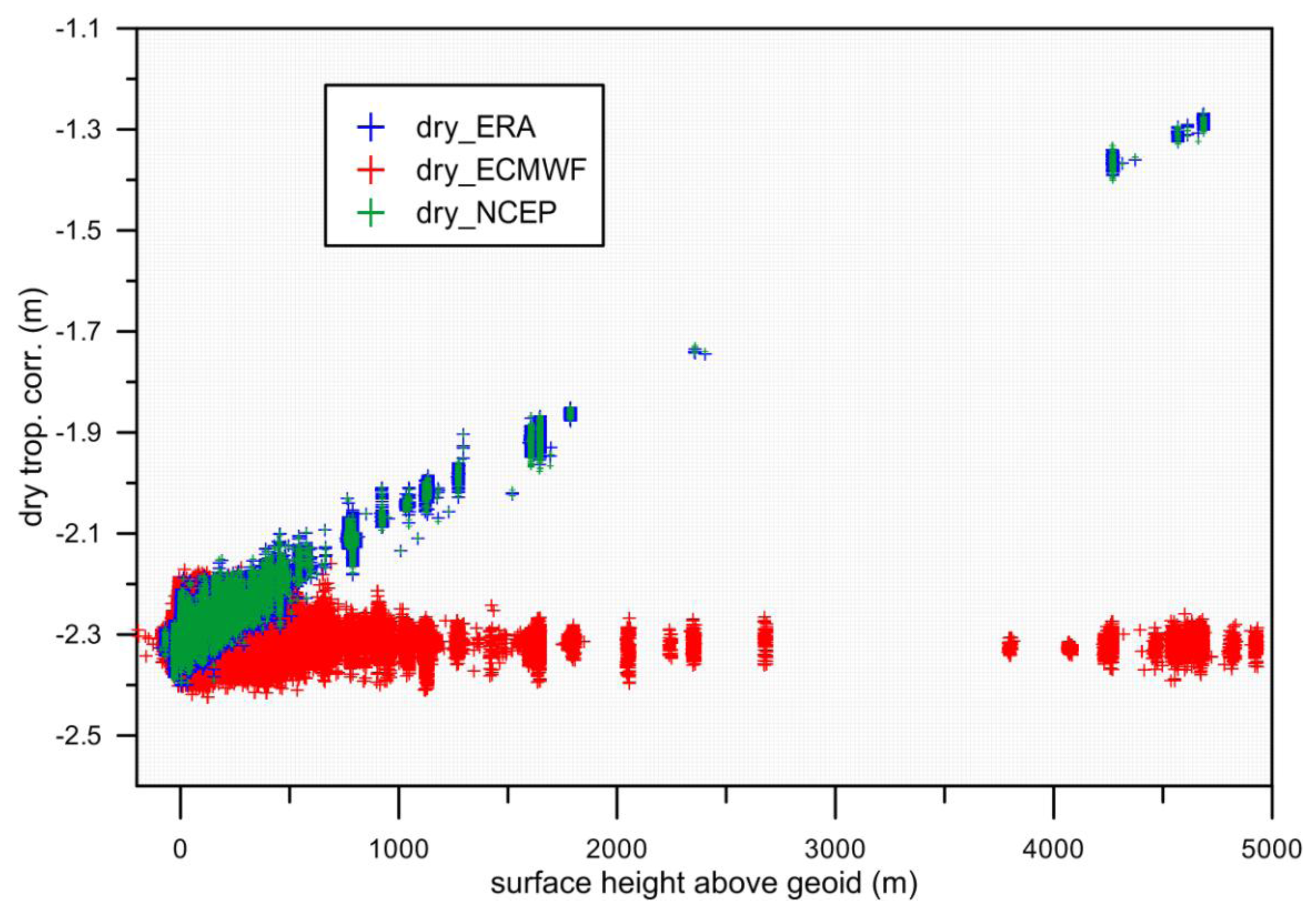
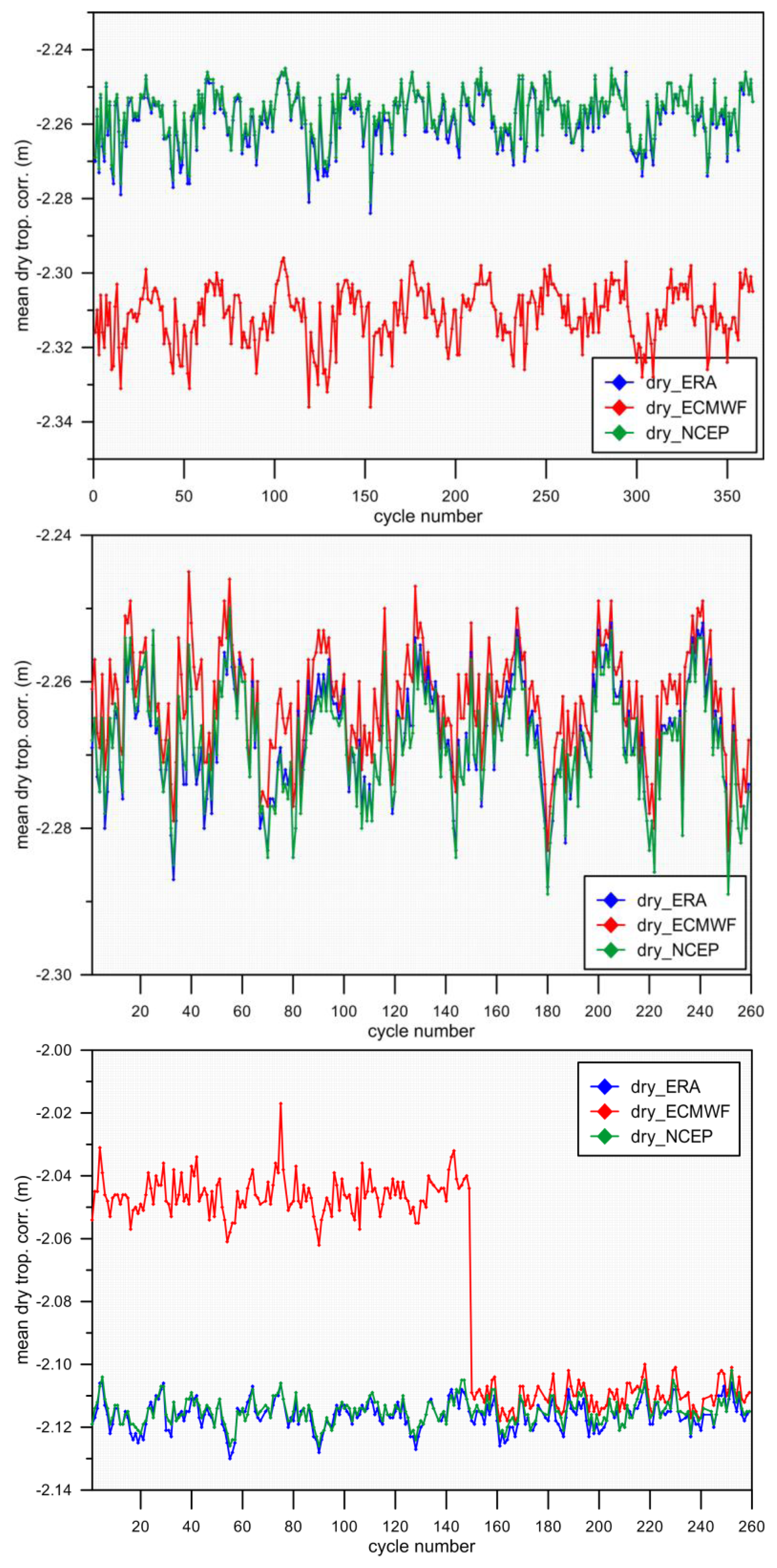
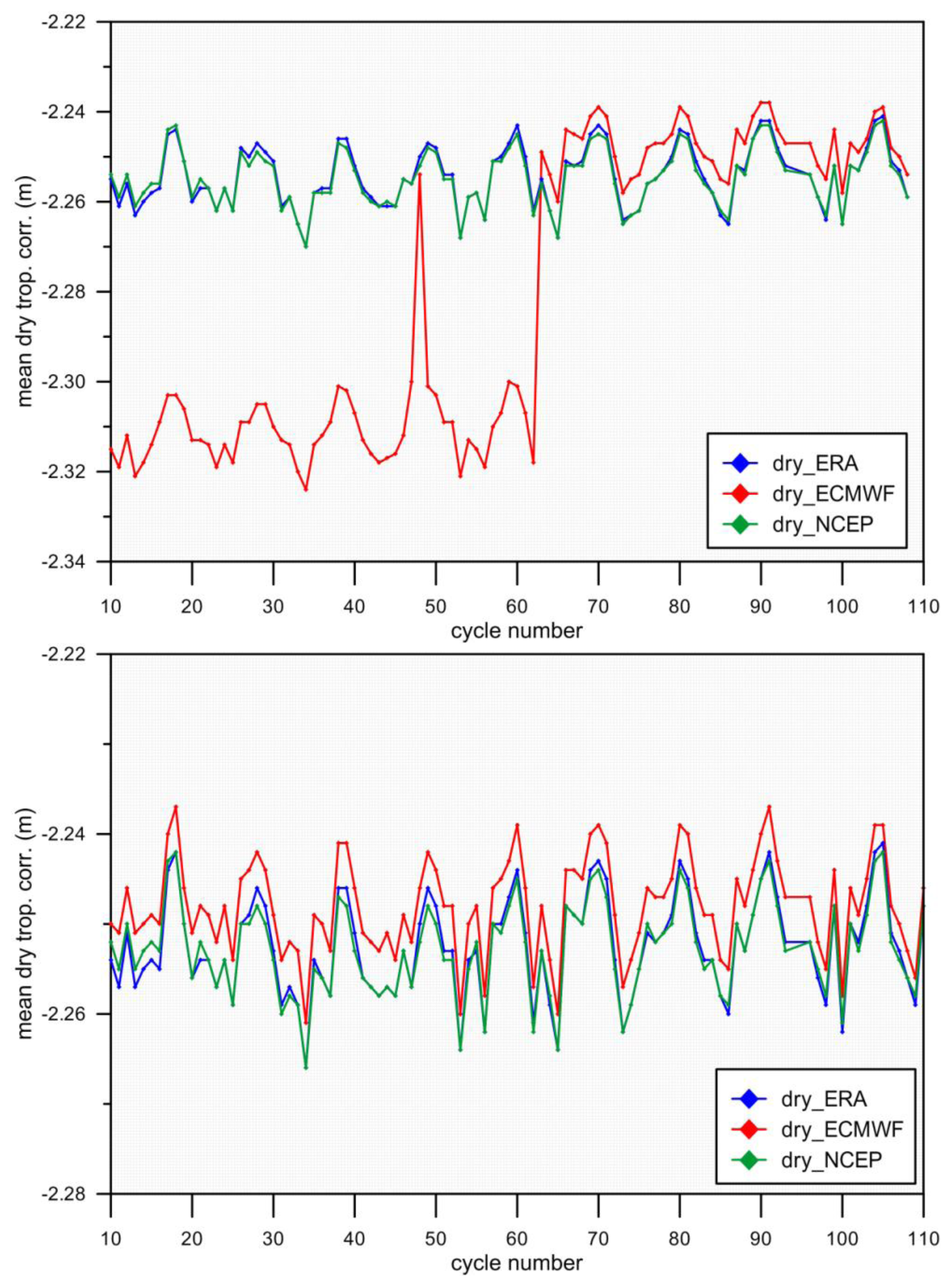
- The DTC has been computed from SLP grids, with an expression similar to Equation (3) with no further reduction to the water surface level. For each location, this error is mainly a bias, which, for inland water at high altitudes, such as the Lake Titicaca (~3800 m), can reach 80 cm. Apart from a constant part, this error also has a seasonal component, since, according to Equation (6), an accurate height dependence of surface pressure can only be modeled by accounting for the seasonal variations of atmospheric pressure with temperature [43].
- (2)
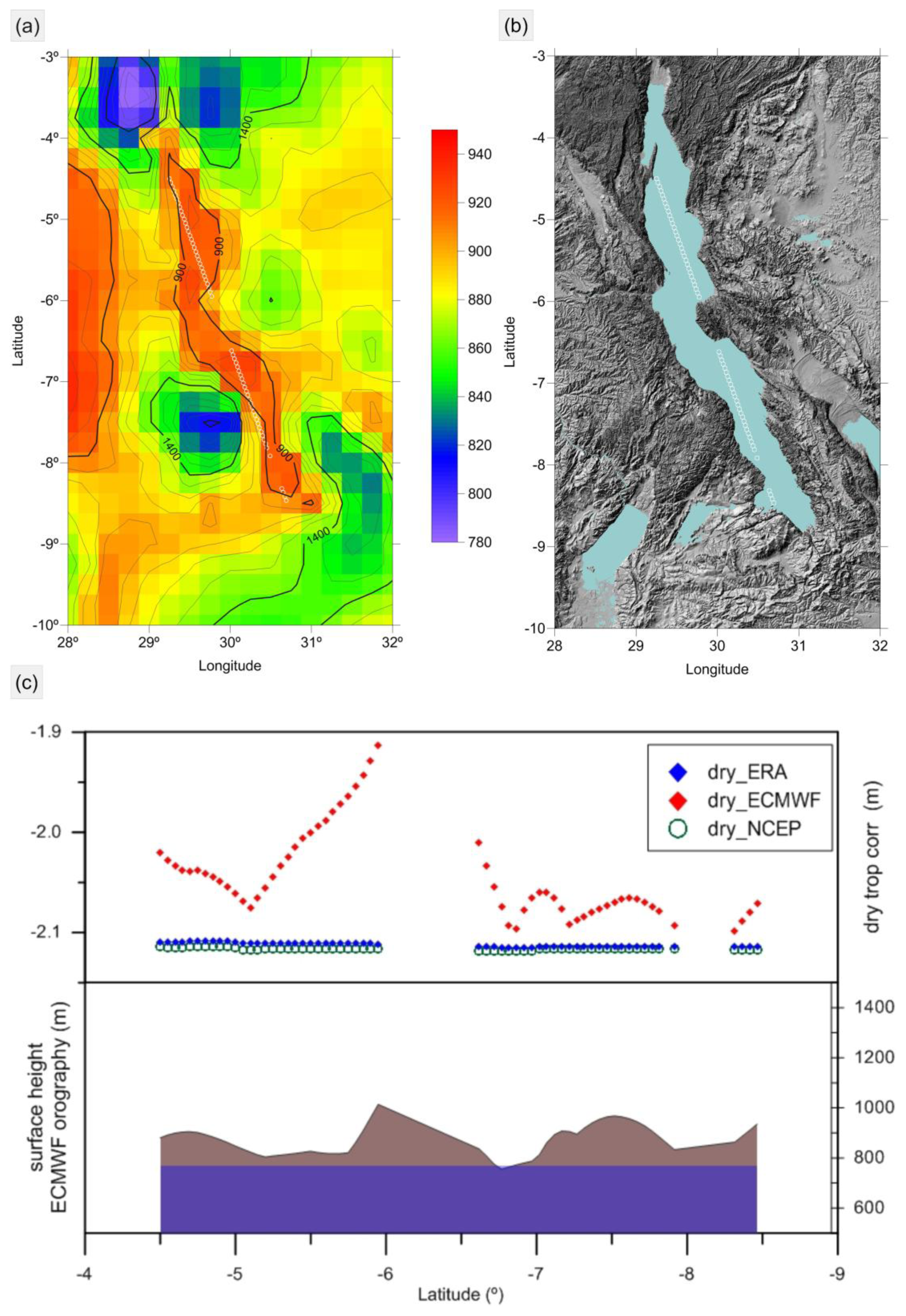
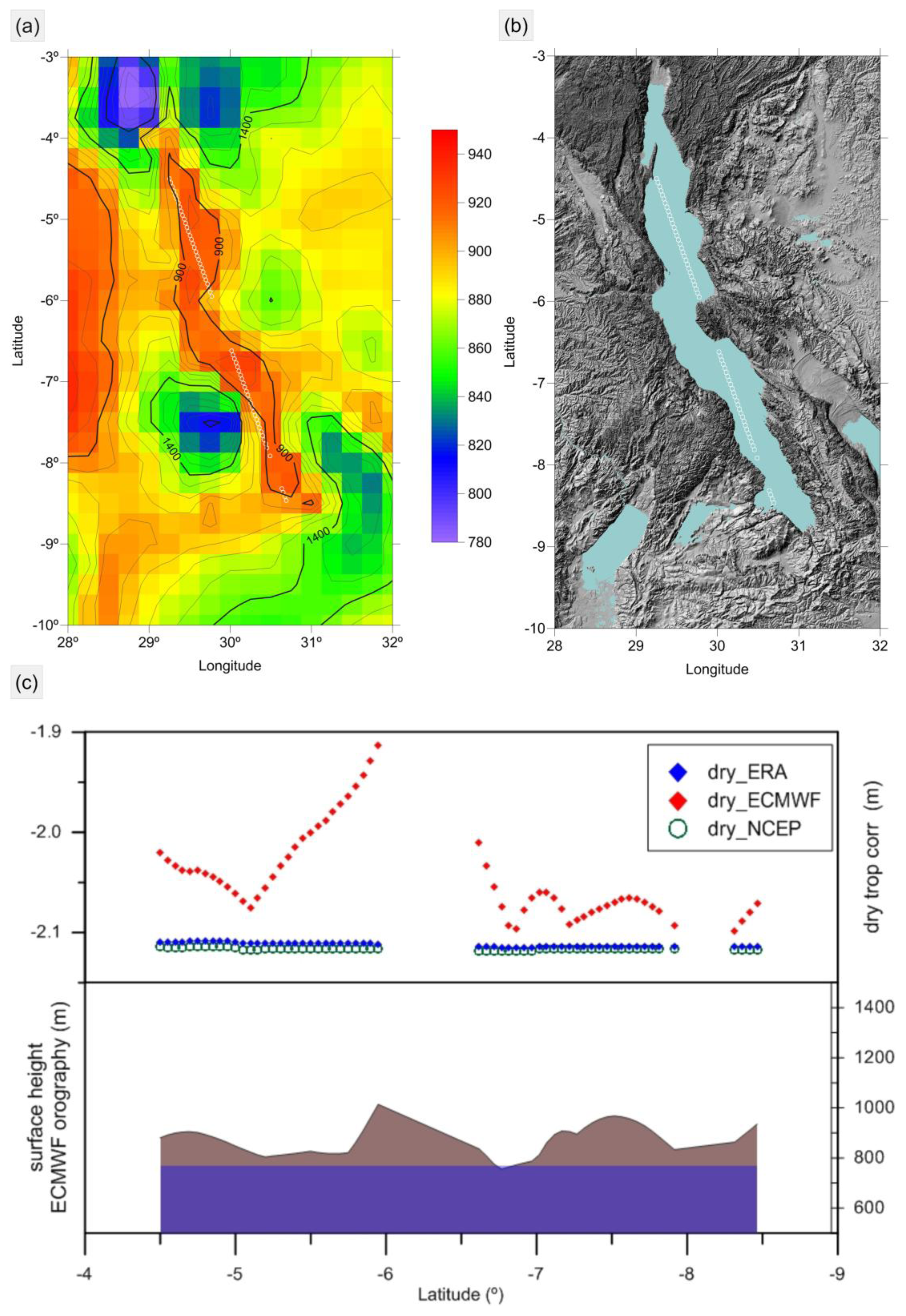
- The DTC is estimated from surface pressure grids at the level of the model orography. This will induce interpolation errors, due to the fact that the model orography might depart significantly from the actual surface height. In regions of large variations in terrain height, such as a river in a deep valley or a lake surrounded by high mountains, even if the model orography correctly fits the terrain heights, there may be a large difference between the DTC at the points over the mountains and the DTC at the center of lake or river. This may cause along-track interpolation errors at the decimeter level, with a linear decrease/increase in the DTC as the points approach the center of the lake, reported as “V shape” errors by, e.g., [5], and illustrated in Figures 3 and 4 for Lake Tanganyika.
- (3)
- The DTC has been computed from SLP grids, with an expression, such as Equation (3), with further reduction to the surface water level, for each along-track altimeter location, using an appropriate height reduction. Studies by [43] show that, for heights up to 1000 m, Equation (6) provides the DTC with an accuracy of a few millimeters if an accurate DEM is adopted and the GPT climatological model is used to model the seasonal dependence of atmospheric pressure on temperature. Further research is required to find out how these results can be extended to larger heights, up to 4000 or 5000 m, since a few continental water regions of interest exist at these altitudes. Preliminary results indicate that for these altitudes, errors due to the inaccurate modeling of both the height and the temperature dependence of surface pressure are expected.
- (1)
- For each atmospheric model SLP grid node, compute the correction at sea level using Equation (3) and setting hs = 0.
- (2)
- Interpolate for each altimeter measurement location.
- (3)
- Apply height reduction using Equation (6) and a model topography, such as DTU10 (apart from the Caspian Sea, where a mean sea height must be adopted). Users may also use a local and more precise DEM where available. For studies over lakes or reservoirs, for example, it will be preferable to use the mean lake height instead. In the implementation of Equation (6), the surface temperature can be obtained from the values of the temperature at mean sea level given by the GPT climatologic model and considering a mean normal lapse rate of temperature with height of −0.0065 K/m.
2.2. Wet Tropospheric Correction
2.2.1. WTC Estimation
2.2.2. Analysis of WTC Errors Present on Altimetric Products
2.3. Examples of Case Studies
3. Ionospheric Correction
3.1. Estimation of the Ionospheric Correction
3.2. Analysis of Issues Regarding the Computation of the Ionospheric Correction over Inland Waters
4. Discussion and Conclusions
Acknowledgements
Conflict of Interest
- Author ContributionsAll authors contributed to the conception of the paper, data processing, analysis and discussion, writing of the manuscript and its overall editing and revision.
References and Notes
- Birkett, C.M. The contribution of TOPEX/POSEIDON to the global monitoring of climatically sensitive lakes. J. Geophys. Res.: Oceans 1995, 100, 25179–25204. [Google Scholar]
- Cazenave, A.; Bonnefond, P.; Dominh, K.; Schaeffer, P. Caspian sea level from TOPEX-POSEIDON altimetry: Level now falling. Geophys. Res. Lett 1997, 24, 881–884. [Google Scholar]
- Calmant, S.; Seyler, F. Continental surface waters from satellite altimetry. C. R. Geosci 2006, 338, 1113–1122. [Google Scholar]
- Cretaux, J.F.; Birkett, C. Lake studies from satellite radar altimetry. C. R. Geosci 2006, 338, 1098–1112. [Google Scholar]
- Cretaux, J.F.; Calmant, S.; Romanovski, V.; Shabunin, A.; Lyard, F.; Berge-Nguyen, M.; Cazenave, A.; Hernandez, F.; Perosanz, F. An absolute calibration site for radar altimeters in the continental domain: Lake Issykkul in Central Asia. J. Geodesy 2009, 83, 723–735. [Google Scholar]
- Cretaux, J.F.; Calmant, S.; Romanovski, V.; Perosanz, F.; Tashbaeva, S.; Bonnefond, P.; Moreira, D.; Shum, C.K.; Nino, F.; Berge-Nguyen, M.; et al. Absolute calibration of Jason radar altimeters from GPS kinematic campaigns over Lake Issykkul. Mar. Geod 2011, 34, 291–318. [Google Scholar]
- Cretaux, J.F.; Berge-Nguyen, M.; Calmant, S.; Romanovski, V.V.; Meyssignac, B.; Perosanz, F.; Tashbaeva, S.; Arsen, A.; Fund, F.; Martignago, N.; et al. Calibration of Envisat radar altimeter over Lake Issykkul. Adv. Space Res 2013, 51, 1523–1541. [Google Scholar]
- Cretaux, J.F.; Kouraev, A.V.; Papa, F.; Berge-Nguyen, M.; Cazenave, A.; Aladin, N.; Plotnikov, I.S. Evolution of sea level of the big Aral Sea from satellite altimetry and its implications for water balance. J. Gt. Lakes Res 2005, 31, 520–534. [Google Scholar]
- Coe, M.T.; Birkett, C.M. Calculation of river discharge and prediction of lake height from satellite radar altimetry: Example for the Lake Chad basin. Water Resour. Res 2004. [Google Scholar] [CrossRef]
- Sharifi, M.A.; Forootan, E.; Nikkhoo, M.; Awange, J.L.; Najafi-Alamdari, M. A point-wise least squares spectral analysis (LSSA) of the Caspian Sea level fluctuations, using TOPEX/Poseidon and Jason-1 observations. Adv. Space Res 2013, 51, 858–873. [Google Scholar]
- Aladin, N.; Cretaux, J.F.; Plotnikov, I.S.; Kouraev, A.V.; Smurov, A.O.; Cazenave, A.; Egorov, A.N.; Papa, F. Modern hydro-biological state of the Small Aral sea. Environmetrics 2005, 16, 375–392. [Google Scholar]
- Mercier, F.; Cazenave, A.; Maheu, C. Interannual lake level fluctuations 1993–1999 in Africa from Topex/Poseidon: Connections with ocean-atmosphere interactions over the Indian Ocean. Glob. Planet. Chang 2002, 32, 141–163. [Google Scholar]
- Chelton, D.B.; Ries, J.C.; Haines, B.J.; Fu, L.L.; Callahan, P.S. Satellite Altimetry. In Satellite Altimetry and Earth Sciences: A Handbook of Techniques and Applications; Fu, L.L., Cazenave, A., Eds.; Academic: San Diego, CA, USA, 2001; Volume 69, pp. 1–131. [Google Scholar]
- Andersen, O.B.; Scharroo, R. Range and Geophysical Corrections in Coastal Regions: And Implications for Mean Sea Surface Determination. In Coastal Altimetry; Vignudelli, S., Kostianoy, A.G., Cipollini, P., Benveniste, J., Eds.; Springer-Verlag: Berlin/Heidelberg, Germany, 2011; pp. 103–145. [Google Scholar]
- Birkett, C.; Reynolds, C.; Beckley, B.; Doorn, B. From Research to Operations: The USDA Global Reservoir and Lake Monitor. In Coastal Altimetry; Vignudelli, S., Kostianoy, A.G., Cipollini, P., Benveniste, J., Eds.; Springer-Verlag: Berlin/Heidelberg, Germany, 2011; pp. 19–50. [Google Scholar]
- Birkett, C.M.; Beckley, B. Investigating the performance of the Jason-2/OSTM radar altimeter over lakes and reservoirs. Mar. Geod 2010, 33, 204–238. [Google Scholar]
- Liao, J.J.; Gao, L.; Wang, X.M. Numerical simulation and forecasting of water level for Qinghai Lake using multi-altimeter data between 2002 and 2012. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens 2014, 7, 609–622. [Google Scholar]
- Gao, L.; Liao, J.J.; Shen, G.Z. Monitoring lake-level changes in the Qinghai-Tibetan Plateau using radar altimeter data 2002–2012. J. Appl. Remote Sens 2013. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Calmant, S.; Del Rio, R.A.; Kouraev, A.; Bergé-Nguyen, M.; Maisongrande, P. Lakes Studies from Satellite Altimetry. In Coastal Altimetry; Vignudelli, S., Kostianoy, A.G., Cipollini, P., Benveniste, J., Eds.; Springer-Verlag: Berlin/Heidelberg, Germany, 2011; pp. 509–533. [Google Scholar]
- Zhang, M.M.; Lee, H.; Shum, C.K.; Alsdorf, D.; Schwartz, F.; Tseng, K.H.; Yi, Y.C.; Kuo, C.Y.; Tseng, H.Z.; Braun, A.; et al. Application of retracked satellite altimetry for inland hydrologic studies. Int. J. Remote Sens 2010, 31, 3913–3929. [Google Scholar]
- Shum, C.; Yi, Y.; Cheng, K.; Kuo, C.; Braun, A.; Calmant, S.; Chambers, D. Calibration of JASON-1 altimeter over Lake Erie. Mar. Geod 2003, 26, 335–354. [Google Scholar]
- Troitskaya, Y.I.; Rybushkina, G.V.; Soustova, I.A.; Balandina, G.N.; Lebedev, S.A.; Kostyanoi, A.G.; Panyutin, A.A.; Filina, L.V. Satellite altimetry of inland water bodies. Water Resour 2012, 39, 184–199. [Google Scholar]
- Berry, P.A.M. Two Decades of Inland Water Monitoring Using Satellite Radar Altimetry. Proceedings of the Symposium on 15 Years of Progress in Radar Altimetry, Venice, Italy, 13–18 March 2006; Benveniste, J., Ménard, Y., Eds.; ESA: Venice, Italy, 2006. [Google Scholar]
- Berry, P.A.M.; Wheeler, J.L. ENVISAT-ERS Exploitation River and Lake Product Specification Document v3.5. 2009. Available on line: http://tethys.eaprs.cse.dmu.ac.uk/RiverLake/info/documents (accessed on 5 January 2014).
- Mercier, F. Satellite Altimetry over Non-Ocean Areas: An Improved Wet Tropospheric Correction from Meteorological Models. Proceedings of EGS-AGU-EUG Joint Assembly, Nice, France, 6–11 April 2003.
- Cretaux, J.F.; Jelinski, W.; Calmant, S.; Kouraev, A.; Vuglinski, V.; Berge-Nguyen, M.; Gennero, M.C.; Nino, F.; Del Rio, R.A.; Cazenave, A.; et al. SOLS: A lake database to monitor in the Near Real Time water level and storage variations from remote sensing data. Adv. Space Res 2011, 47, 1497–1507. [Google Scholar]
- Iijima, B.A.; Harris, I.L.; Ho, C.M.; Lindqwister, U.J.; Mannucci, A.J.; Pi, X.; Reyes, M.J.; Sparks, L.C.; Wilson, B.D. Automated daily process for global ionospheric total electron content maps and satellite ocean altimeter ionospheric calibration based on Global Positioning System data. J. Atmos. Sol.: Terr. Phys 1999, 61, 1205–1218. [Google Scholar]
- Scharroo, R.; Smith, W.H.F. A global positioning system-based climatology for the total electron content in the ionosphere. J. Geophys. Res.: Space Phys 2010. [Google Scholar] [CrossRef]
- Bent, R.B. Bent ionospheric model 1972. Planet. Space Sci 1992. [Google Scholar] [CrossRef]
- Llewellyn, S.K.; Bent, R.B. Documentation and Description of the Bent Ionospheric Model; Air Force Cambridge Research Laboratory, Hanscom Air Force Base: Bedford, MA, USA, 1973. [Google Scholar]
- Wahr, J.M. Deformation induced by polar motion. J. Geophys. Res.: Solid Earth Planets 1985, 90, 9363–9368. [Google Scholar]
- Scharroo, R.; Leuliette, E.W.; Lillibridge, J.L.; Byrne, D.; Naeije, M.C.; Mitchum, G.T. RADS: Consistent Multi-Mission Products. Proceedings of Symposium on 20 Years of Progress in Radar Altimetry, Venice, Italy, 20–28 September 2012.
- Davis, J.L.; Herring, T.A.; Shapiro, I.I.; Rogers, A.E.E.; Elgered, G. Geodesy by Radio Interferometry—Effects of atmospheric modeling errors on estimates of baseline length. Radio Sci 1985, 20, 1593–1607. [Google Scholar]
- Miller, M.; Buizza, R.; Haseler, J.; Hortal, M.; Janssen, P.; Untch, A. Increased resolution in the ECMWF deterministic and ensemble prediction systems. ECMWF Newslett 2010, 124, 10–16. [Google Scholar]
- Caplan, P.; Derber, J.; Gemmill, W.; Hong, S.Y.; Pan, H.L.; Parrish, D. Changes to the 1995 NCEP operational medium-range forecast model analysis-forecast system. Weather Forecast 1997, 12, 581–594. [Google Scholar]
- Dee, D.P.; Uppala, S.M.; Simmons, A.J.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.A.; Balsamo, G.; Bauer, P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc 2011, 137, 553–597. [Google Scholar]
- NOAA, U.S. Standard Atmosphere; NOAA/NASA/USAF: Washington, DC, USA, 1976; p. 241.
- Berg, H. Allgemeine Meteorologie: Einführung in die Physik der Atmosphäre; F. Dümmler: Bonn, Germany, 1948. [Google Scholar]
- Kouba, J. Implementation and testing of the gridded Vienna Mapping Function 1 (VMF1). J. Geodesy 2008, 82, 193–205. [Google Scholar]
- Hopfield, H.S. Two-quartic tropospheric refractivity profile for correcting satellite data. J. Geophys. Res 1969, 74, 4487–4499. [Google Scholar]
- Boehm, J.; Heinkelmann, R.; Schuh, H. Short note: A global model of pressure and temperature for geodetic applications. J. Geodesy 2007, 81, 679–683. [Google Scholar]
- Salstein, D.A.; Ponte, R.M.; Cady-Pereira, K. Uncertainties in atmospheric surface pressure fields from global analyses. J. Geophys. Res.: Atmos 2008. [Google Scholar] [CrossRef]
- Fernandes, M.J.; Pires, N.; Lázaro, C.; Nunes, A.L. Tropospheric Delays from GNSS for Application in Coastal Altimetry. Adv. Space Res 2013, 51, 1352–1368. [Google Scholar]
- vanden Dool, H.M.; Saha, S.; Schemm, J.; Huang, J. A temporal interpolation method to obtain hourly atmospheric surface pressure tides in Reanalysis 1979–1995. J. Geophys. Res.: Atmos 1997, 102, 22013–22024. [Google Scholar]
- Ray, R.D.; Ponte, R.M. Barometric tides from ECMWF operational analyses. Ann. Geophys 2003, 21, 1897–1910. [Google Scholar]
- Ponte, R.M.; Ray, R.D. Atmospheric pressure corrections in geodesy and oceanography: A strategy for handling air tides. Geophys. Res. Lett 2002. [Google Scholar] [CrossRef]
- Andersen, O.B.; Knudsen, P. DNSC08 mean sea surface and mean dynamic topography models. J. Geophys. Res.: Oceans 2009. [Google Scholar] [CrossRef]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The development and evaluation of the Earth Gravitational Model 2008 (EGM2008). J. Geophys. Res.: Solid Earth 2012. [Google Scholar] [CrossRef]
- Scharroo, R.; Lillibridge, J.L.; Smith, W.H.F.; Schrama, E.J.O. Cross-calibration and long-term monitoring of the microwave radiometers of ERS, TOPEX, GFO, Jason, and Envisat. Mar. Geod 2004, 27, 279–297. [Google Scholar]
- Eymard, L.; Obligis, E. The Altimetric Wet Troposheric Correction Progress since the ERS-1 Mission. Proceedings of the Symposium on 15 Years of Progress in Radar Altimetry, Venice, Italy, 13–18 March 2006; ESA: Venice, Italy, 2006. [Google Scholar]
- Tournadre, J.; Lambin-Artru, J.; Steunou, N. Cloud and rain effects on AltiKa/SARAL Ka-band radar Altimeter—Part I: Modeling and mean annual data availability. IEEE Trans. Geosci. Remote Sens 2009, 47, 1806–1817. [Google Scholar]
- Stum, J.; Sicard, P.; Carrere, L.; Lambin, J. Using objective analysis of scanning radiometer measurements to compute the water vapor path delay for Altimetry. IEEE Trans. Geosci. Remote Sens 2011, 49, 3211–3224. [Google Scholar]
- Desportes, C.; Obligis, E.; Eymard, L. On the wet tropospheric correction for altimetry in coastal regions. IEEE Trans. Geosci. Remote Sens 2007, 45, 2139–2149. [Google Scholar]
- Brown, S. A. Novel Near-Land Radiometer Wet Path-Delay Retrieval algorithm: Application to the Jason-2/OSTM advanced microwave radiometer. IEEE Trans. Geosci. Remote Sens 2010, 48, 1986–1992. [Google Scholar]
- Fernandes, M.J.; Lazaro, C.; Nunes, A.L.; Pires, N.; Bastos, L.; Mendes, V.B. GNSS-derived path delay: An approach to compute the wet tropospheric correction for coastal altimetry. IEEE Geosci. Remote Sens. Lett 2010, 7, 596–600. [Google Scholar]
- Obligis, E.; Desportes, C.; Eymard, L.; Fernandes, M.J.; Lázaro, C.; Nunes, A.L. Tropospheric Corrections for Coastal Altimetry. In Coastal Altimetry; Vignudelli, S., Kostianoy, A.G., Cipollini, P., Benveniste, J., Eds.; Springer-Verlag: Berlin/Heidelberg, Germany, 2011; pp. 147–176. [Google Scholar]
- Fernandes, M.J.; Nunes, A.L.; Lazaro, C. Analysis and inter-calibration of wet path delay datasets to compute the wet tropospheric correction for CryoSat-2 over ocean. Remote Sens 2013, 5, 4977–5005. [Google Scholar]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology—Remote-sensing of atmospheric water-vapor using the global positioning system. J. Geophys. Res.: Atmos 1992, 97, 15787–15801. [Google Scholar]
- Bevis, M.; Businger, S.; Chiswell, S.; Herring, T.A.; Anthes, R.A.; Rocken, C.; Ware, R.H. GPS meteorology—Mapping zenith wet delays onto precipitable water. J. Appl. Meteorol 1994, 33, 379–386. [Google Scholar]
- Mendes, V.B.; Prates, G.; Santos, L.; Langley, R.B. An Evaluation of the Accuracy of Models of the Determination of the Weighted Mean Temperature of the Atmosphere. Proceedings of the ION 2000 National Technical Meeting, Anaheim, CA, USA, 26–28 January 2000.
- Mendes, V.B. Modeling the Neutral-Atmosphere Propagation Delay in Radiometric Space Techniques. Ph.D. Thesis, University of New Brunswick, Fredericton, New Brunswick, Canada, 1999. [Google Scholar]
- Mercier, F.; Zanife, O.Z. Improvement of the Topex/Poseidon Altimetric Data Processing for Hydrological Purposes (Cash Project). Proceedings of the Symposium on 15 Years of Progress in Radar Altimetry, Venice, Italy, 13–18 March 2006; Benveniste, J., Ménard, Y., Eds.; ESA: Venice, Italy, 2006. [Google Scholar]
- Rush, C.M. Ionospheric radio propagation models and predictions—A minireview. IEEE Trans. Antennas Propag 1986, 34, 1163–1170. [Google Scholar]
- Schreiner, W.S.; Markin, R.E.; Born, G.H. Correction of single frequency altimeter measurements for ionosphere delay. IEEE Trans. Geosci. Remote Sens 1997, 35, 271–277. [Google Scholar]
- Imel, D.A. Evaluation of the topex/poseidon dual-frequency ionosphere correction. J. Geophys. Res.: Oceans 1994, 99, 24895–24906. [Google Scholar]
- Bilitza, D. International Reference Ionosphere 1990; National Space Science Data Center: Lanham, MD, USA, 1990; p. 156. [Google Scholar]
- Bilitza, D. International reference ionosphere 2000. Radio Sci 2001, 36, 261–275. [Google Scholar]
- Bilitza, D.; Reinisch, B.W. International reference ionosphere 2007: Improvements and new parameters. Adv. Space Res 2008, 42, 599–609. [Google Scholar]
- Hernandez-Pajares, M.; Juan, J.M.; Sanz, J.; Bilitza, D. Combining GPS Measurements and IRI Model Values for Space Weather Specification. In Modelling the Topside Ionosphere and Plasmasphere; Rawer, K., Bilitza, D., Reinisch, B.W., Eds.; Pergamon-Elsevier Science Ltd: Oxford, UK, 2002; Volume 29, pp. 949–958. [Google Scholar]
- Komjathy, A.; Sparks, L.; Wilson, B.D.; Mannucci, A.J. Automated daily processing of more than 1000 ground-based GPS receivers for studying intense ionospheric storms. Radio Sci 2005. [Google Scholar] [CrossRef]
- Mannucci, A.J.; Wilson, B.D.; Yuan, D.N.; Ho, C.H.; Lindqwister, U.J.; Runge, T.F. A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci 1998, 33, 565–582. [Google Scholar]
- Bilitza, D. International Reference Ionosphere—Status 1995/96. In Quantitative Description of Ionospheric Storm Effects and Irregularities; Rawer, K., Bilitza, D., Eds.; Pergamon Press Ltd.: Oxford, UK, 1997; Volume 20, pp. 1751–1754. [Google Scholar]
- Mercier, F.; Rosmorduc, V.; Carrère, L.; Thibaut, P. Coastal and Hydrology Altimetry Product (PISTACH) Handbook. Available online: http://www.aviso.altimetry.fr/fileadmin/documents/data/tools/hdbk_Pistach.pdf (accessed on 27 May 2014).
- Birkett, C.M.; Mertes, L.A.K.; Dunne, T.; Costa, M.H.; Jasinski, M.J. Surface water dynamics in the Amazon Basin: Application of satellite radar altimetry. J. Geophys. Res.: Atmos 2002. [Google Scholar] [CrossRef]
- Legresy, B.; Papa, F.; Remy, F.; Vinay, G.; van den Bosch, M.; Zanife, O.Z. ENVISAT radar altimeter measurements over continental surfaces and ice caps using the ICE-2 retracking algorithm. Remote Sens. Environ 2005, 95, 150–163. [Google Scholar]
- Frappart, F.; Calmant, S.; Cauhope, M.; Seyler, F.; Cazenave, A. Preliminary results of ENVISAT RA-2-derived water levels validation over the Amazon basin. Remote Sens. Environ 2006, 100, 252–264. [Google Scholar] [Green Version]
- Calmant, S.; Seyler, F.; Cretaux, J.F. Monitoring continental surface waters by satellite altimetry. Surv. Geophys 2008, 29, 247–269. [Google Scholar]
- Crespon, F.; Jeansou, E.; Helbert, J.; Moreaux, G.; Lognonné, P.; Godet, P.E.; Garci, R. SPECTRE ( www.noveltis.fr/spectre): A Web Service for Ionospheric Products. Proceedings of the 1st Colloquium Scientific and Fundamental Aspects of the Galileo Programme, Toulouse, France, 1–4 October 2007.
- Francis, C.R. CryoSat Mission and Data Description; CS-RP-ESA-SY-0059; ESTEC: Noordwijk, The Netherlands, 2007; p. 82. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | RADS | Envisat GDR | Jason GDR |
|---|---|---|---|
| Description | Multi-satellite altimeter database. Though originally developed for ocean data, currently contains 1-Hz data over all terrains, including some focus on inland data. | Geophysical Data Records. Applicable primarily to oceans. Include dedicated inland algorithms. | Geophysical Data Records. No specific land processing at all. |
| Version | RADS version 3; version 4 is under development. Data updated twice daily with new data and frequently when better models become available or bugs are found. | GDR v2.1. Require additional external instrumental corrections. May be updated in a few years. | Jason-1: version GDR-C; Jason-2: version GDR-D, version GDR-E under development; will be released in a year. |
| Data rate | 1-Hz, multi-Hz option in RADS v4. | 20-Hz range, SWH, backscatter. All corrections at 1-Hz | |
| Retrackers | Ocean only. | Ocean, sea ice, ice1, ice2 | Ocean only. MLE4 (J2: also MLE3) |
| Dry tropospheric correction | Three corrections are provided: (1) based on ECMWF analysis (same as GDRs); (2) based on sea-level pressure (SLP) fields from NCEP analysis; (3) based on SLP from ERA Interim reanalysis. Both (2) and (3) are corrected for elevation as described in Section 2.1.1, and air tides are taken into account. For long-term stability, ERA Interim is recommended. | Based on surface pressure fields from ECMWF operational analysis. The limited resolution of the background topography model and the development of the model in the frequency domain led to the errors discussed in Section 2.2. Only the most recent GDRs (Jason GDR-D standards) take air tides into account. | |
| Model wet tropospheric correction | Three corrections are provided: (1) based on ECMWF analysis (same as GDRs); (2) based on total column water vapor and near-surface temperature from NCEP, as described in Section 2.2.1; (3) same as in (2) from ERA Interim reanalysis. For long-term stability, ERA Interim is recommended. | Based on multi-layer water vapor fields and temperature from ECMWF operational analysis. Integrated vertically to obtain six-hourly wet tropospheric correction fields used in the multi-mission environment. | |
| Radiometer wet tropospheric correction | Based on brightness temperatures in GDR products, corrected for drift and gain loss, applying appropriate algorithm per satellite. | Based on radiometer brightness temperatures and neural network (Envisat) or parametric (Jason) algorithms. Drift correction already applied in GDR. Same as RADS. | |
| Dual-frequency ionospheric correction | Dual-frequency altimeters only: based on difference in the Ku-band and S- or C-band range. Recomputed taking into account range biases in secondary channel. An along-track smoothed version is also provided. | Based on difference in the Ku-band and S- or C-band range. Does not take range biases into account. Not available on Envisat since the failure of the S-band on 27 January 2008. | |
| GIM ionospheric correction | Based on JPL maps of TEC at two-hourly intervals. Corrected for altitude by a constant scale factor. Only available after September, 1998, period for which the it is the recommended ionospheric correction. | Same as RADS, but altitude correction is unclear. | Same as RADS, but not corrected for altitude, thus overestimating ionospheric correction. |
| Ionospheric correction based on climatology | Two corrections, based on IRI2007 and NIC09. The latter is a significant improvement over the former, as it is based on GPS data [28]. Prior to September 1998, NIC09 is recommended. | Based on Bent model; antiquated model from the 1970s. Vastly underestimates ionospheric correction during high solar activity [29,30]. | |
| Ocean and load tides | FES2004 and GOT4.8 available. Ocean tide does not include loading. | FES2004 and GOT4.8 available. Ocean tide does include loading. | |
| Pole tide | Based on [31]. Properly takes into account different Love numbers for ocean, land and lakes. | Same as RADS. Used to have incorrect Love number over inland waters in older GDR versions. | |
| Models | Mean | Stand. dev. | Min | Max | |
|---|---|---|---|---|---|
| T/P | MWR-ERA | −1.4 | 2.2 | −11.1 | 5.1 |
| MWR-ECMWF | 9.3 | 3.2 | −1.8 | 20.8 | |
| MWR-NCEP | −4.6 | 2.7 | −14.5 | 4.7 | |
| J1 | MWR-ERA | 0.6 | 2.3 | −19.2 | 8.7 |
| MWR-ECMWF | −0.5 | 2.1 | −22.2 | 5.6 | |
| MWR-NCEP | −3.2 | 2.8 | −21.7 | 5.7 | |
| J2 | MWR-ERA | 0.3 | 2.0 | −9.6 | 6.5 |
| MWR-ECMWF | −0.6 | 1.6 | −9.0 | 6.2 | |
| MWR-NCEP | −2.8 | 3.0 | −13.8 | 6.1 | |
| EN | MWR-ERA | 1.3 | 4.1 | −19.8 | 11.5 |
| MWR-ECMWF | 0.1 | 4.0 | −25.9 | 9.8 | |
| MWR-NCEP | −1.8 | 4.4 | −27.6 | 9.7 | |
| Models | Mean | Stand. dev. | Min | Max | |
|---|---|---|---|---|---|
| T/P | MWR- RA | 0.4 | 1.6 | −18.1 | 8.8 |
| MWR-ECMWF | 0.3 | 2.0 | −18.6 | 10.0 | |
| MWR-NCEP | −0.8 | 2.9 | −18.5 | 9.0 | |
| J1 | MWR-ERA | 0.3 | 1.8 | −17.8 | 8.5 |
| MWR-ECMWF | 0.6 | 1.7 | −18.5 | 11.4 | |
| MWR-NCEP | −0.5 | 3.4 | −22.8 | 11.0 | |
| J2 | MWR-ERA | 0.3 | 1.8 | −17.8 | 9.1 |
| MWR-ECMWF | 0.5 | 1.4 | −9.2 | 10.7 | |
| MWR-NCEP | −0.4 | 3.2 | −21.2 | 9.3 | |
| EN | MWR-ERA | 0.5 | 3.2 | −20.0 | 9.5 |
| MWR-ECMWF | 0.8 | 3.1 | −22.9 | 11.1 | |
| MWR-NCEP | −0.1 | 4.0 | −28.0 | 9.3 | |
| Jason-1 | JPL GIM | Dual-Frequency | Smoothed Dual-Frequency |
|---|---|---|---|
| N-W Atlantic | 88.5 | 89.2 | 85.5 |
| Great Lakes | 64.2 | 64.0 | 64.3 |
| Envisat | JPL GIM | Dual-Frequency | Smoothed Dual-Frequency |
| N-W Atlantic | 129.5 | 129.7 | 129.3 |
| Great Lakes | 62.9 | 63.1 | 62.7 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Fernandes, M.J.; Lázaro, C.; Nunes, A.L.; Scharroo, R. Atmospheric Corrections for Altimetry Studies over Inland Water. Remote Sens. 2014, 6, 4952-4997. https://doi.org/10.3390/rs6064952
Fernandes MJ, Lázaro C, Nunes AL, Scharroo R. Atmospheric Corrections for Altimetry Studies over Inland Water. Remote Sensing. 2014; 6(6):4952-4997. https://doi.org/10.3390/rs6064952
Chicago/Turabian StyleFernandes, M. Joana, Clara Lázaro, Alexandra L. Nunes, and Remko Scharroo. 2014. "Atmospheric Corrections for Altimetry Studies over Inland Water" Remote Sensing 6, no. 6: 4952-4997. https://doi.org/10.3390/rs6064952