
Mapping Oil Palm Plantations in Cameroon Using PALSAR 50-m Orthorectified Mosaic Images


Abstract
:
1. Introduction
2. Materials and Methods
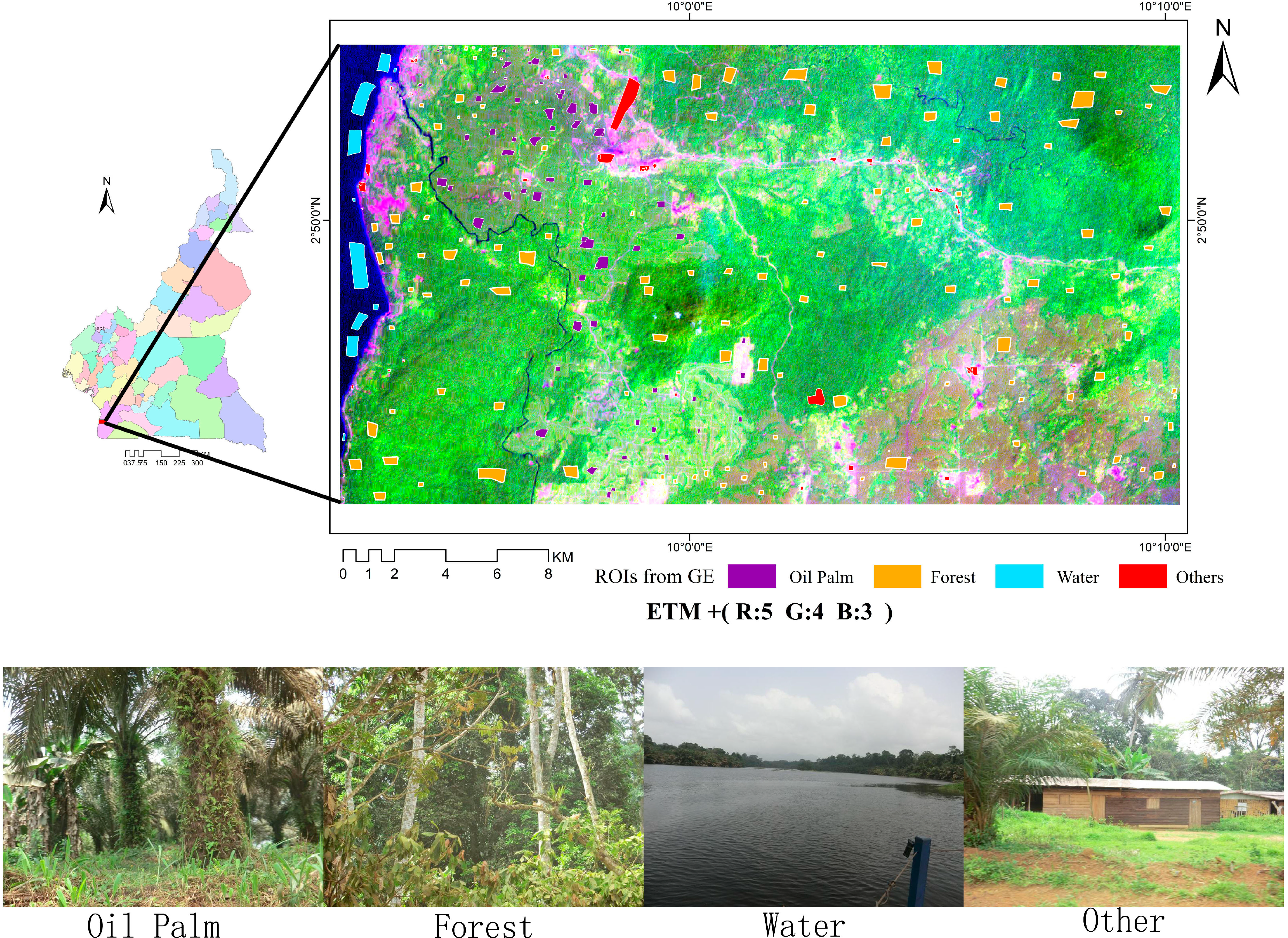
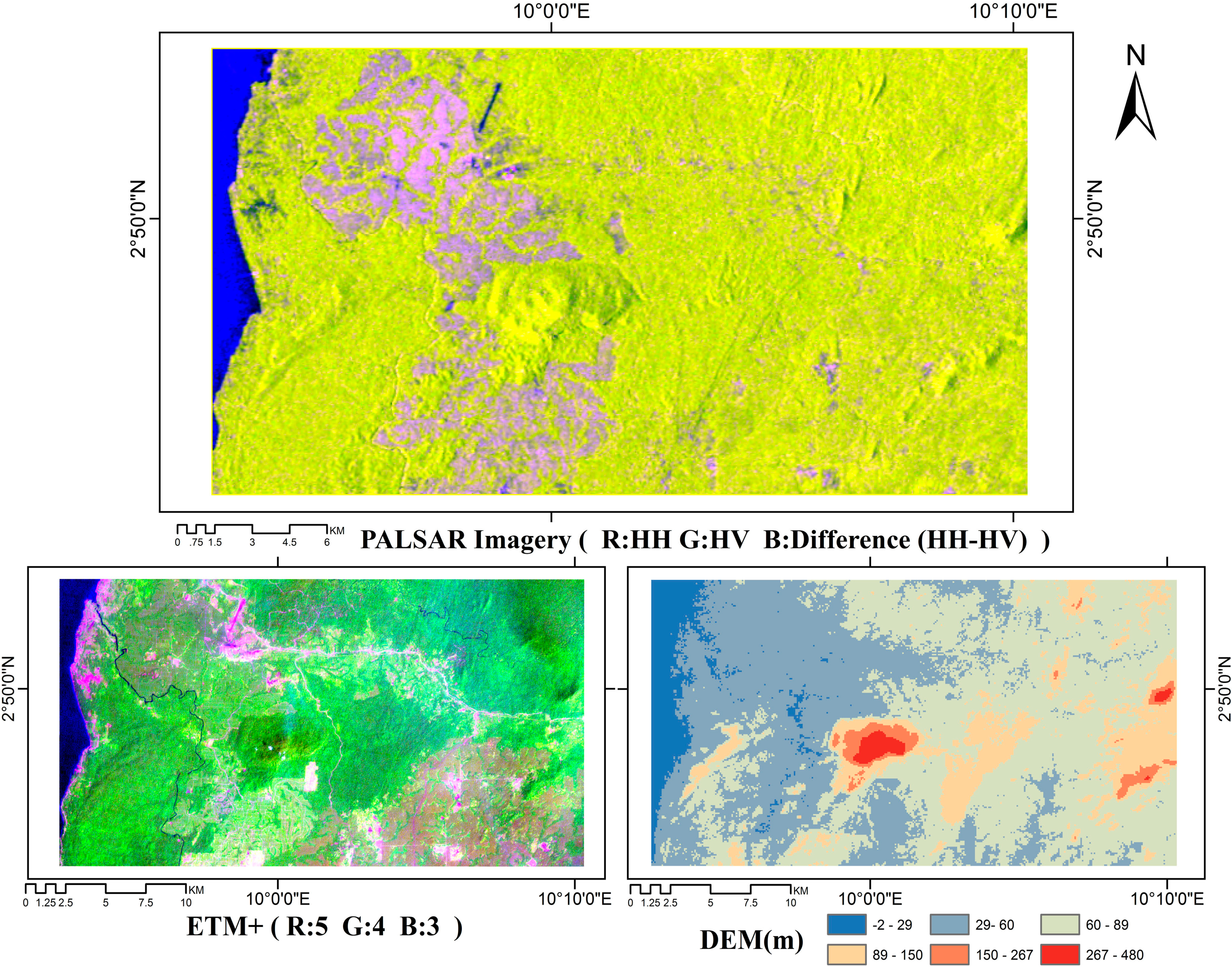
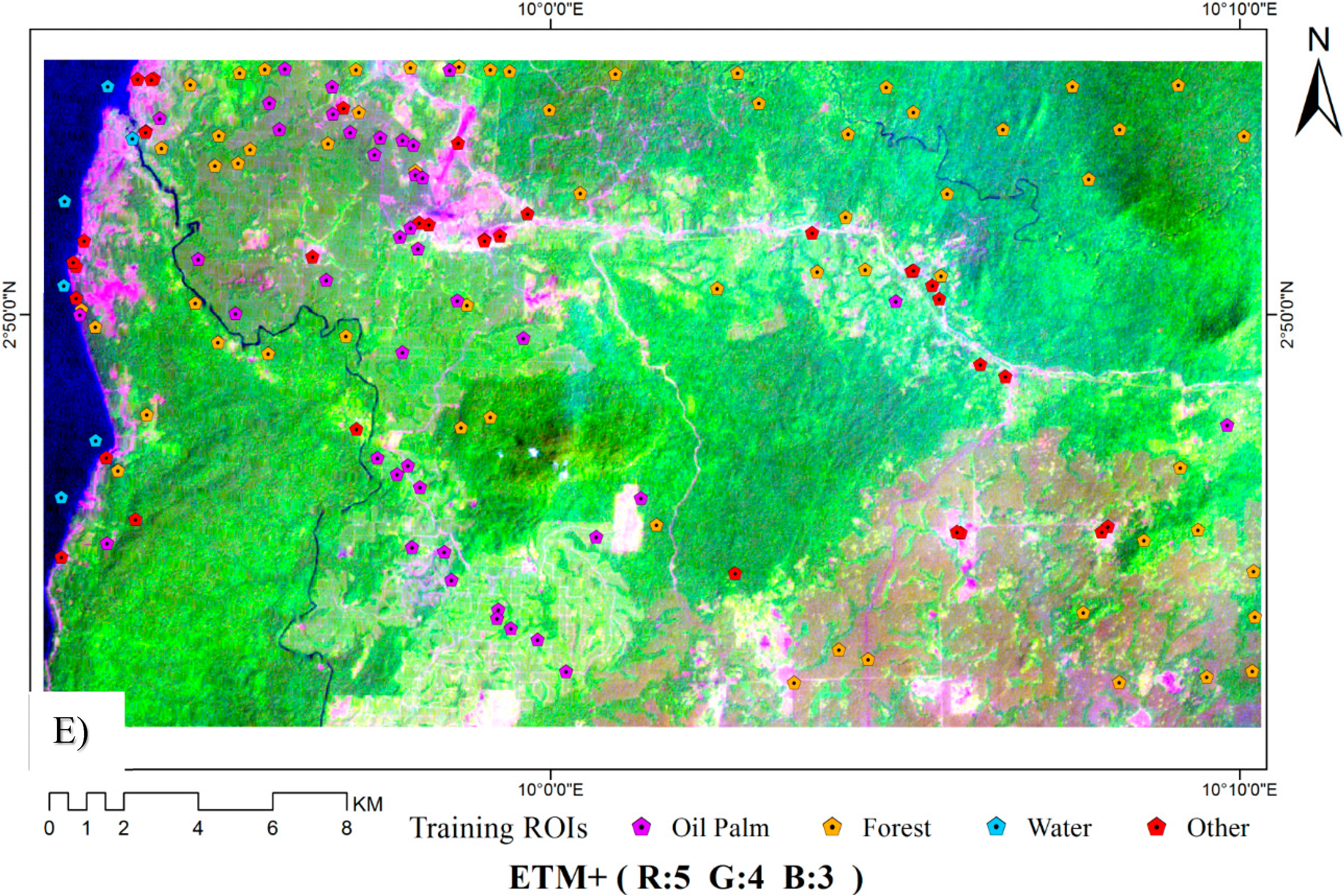
2.1. Study Area

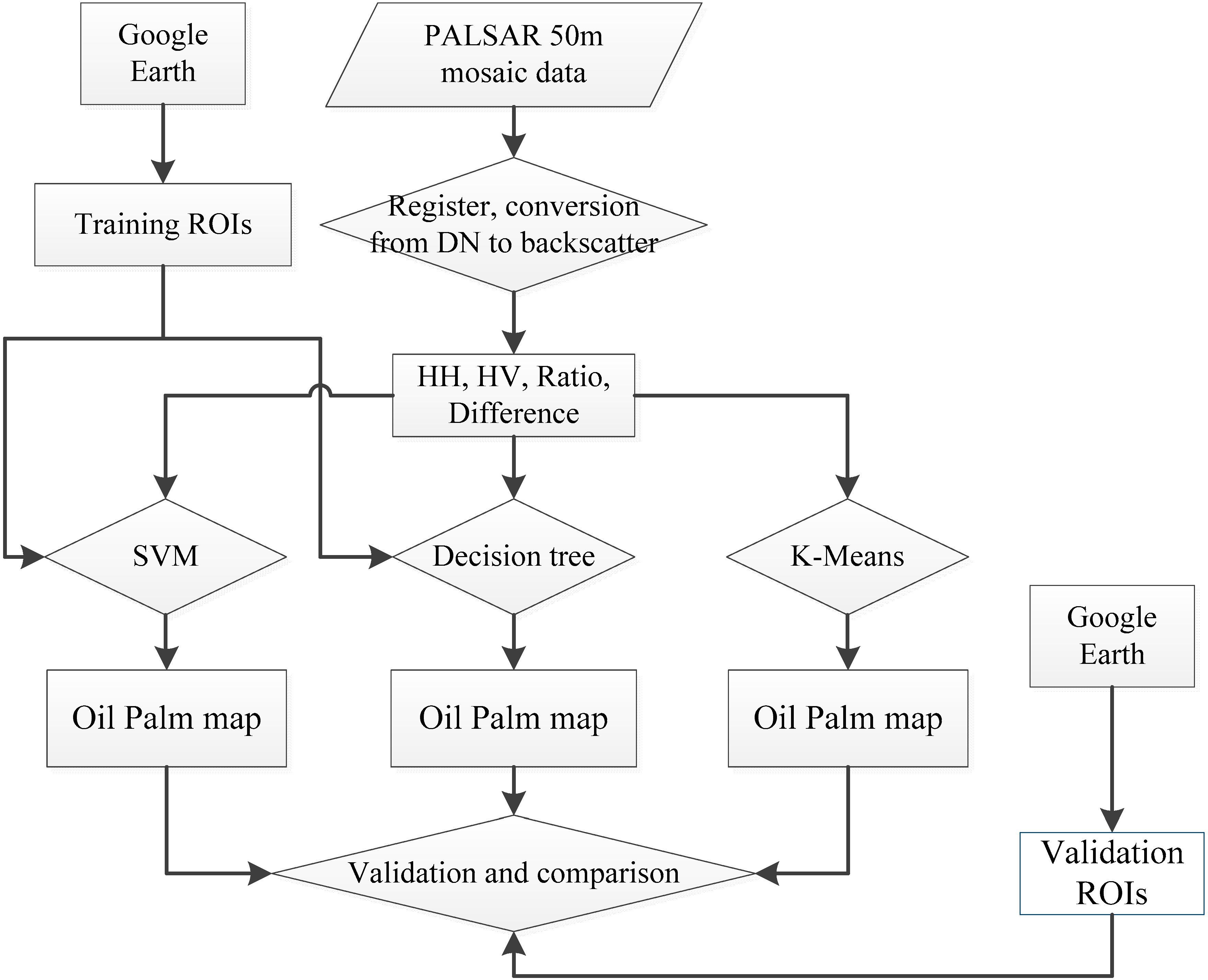
2.2. PALSAR 50-m Orthorectified Mosaic Image Data and Preprocessing

2.3. Regions of Interest (ROIs) for Algorithm Training and Product Validation
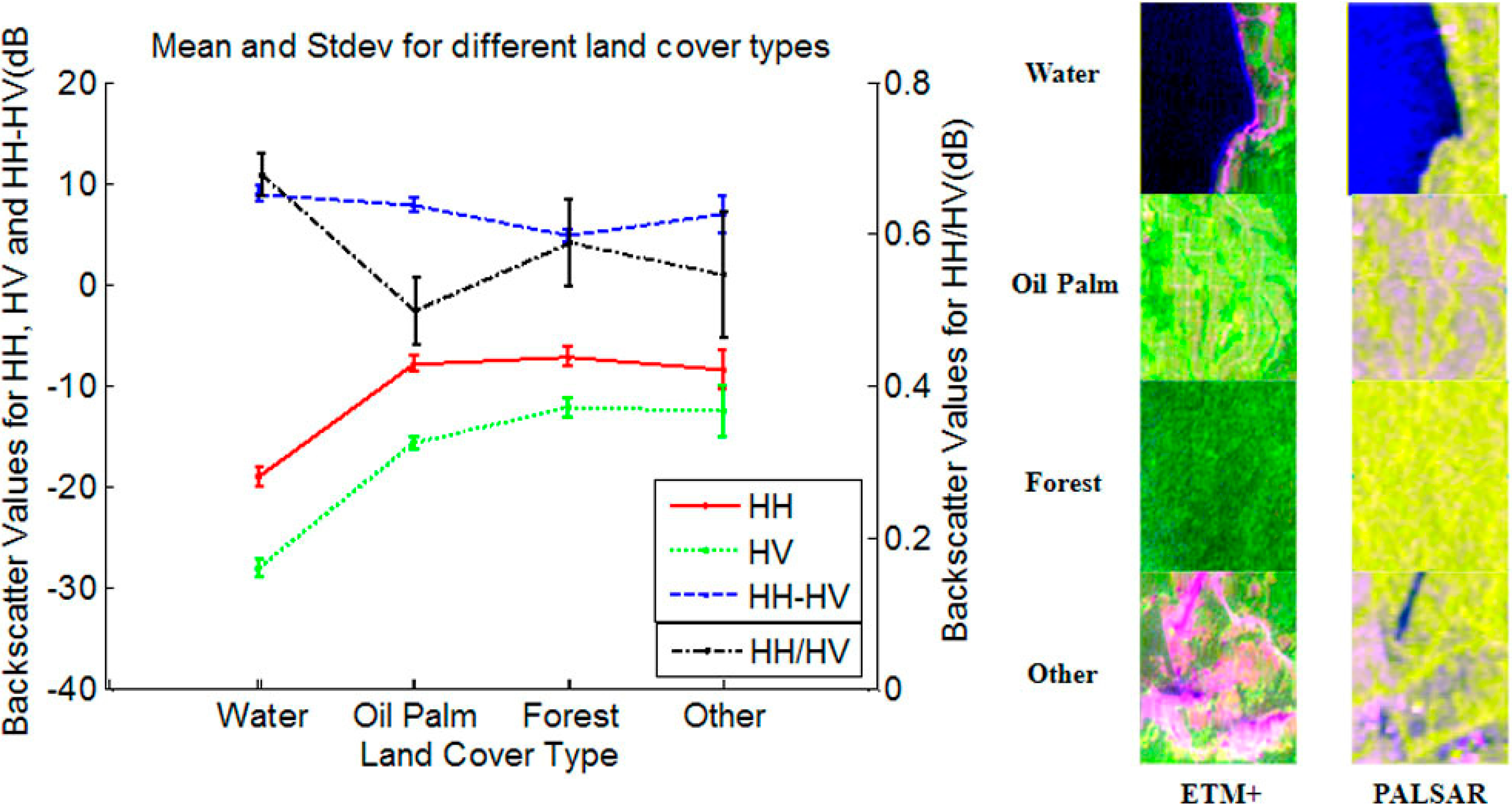
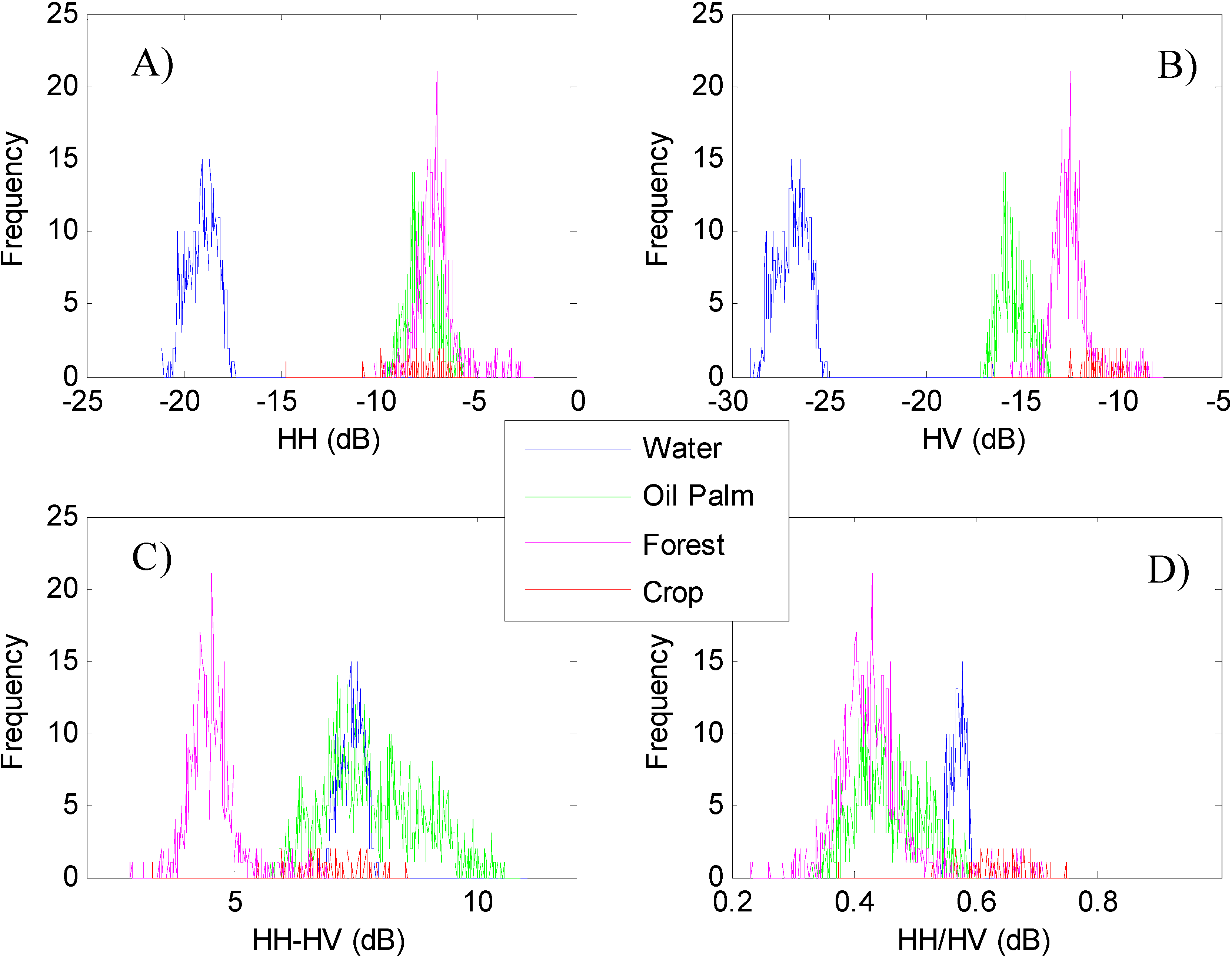
2.4. Signature Analyses of Backscatter Data of Oil Palm and other Land Cover Types



2.5. Mapping Algorithms for Oil Palm Plantations with PALSAR

2.6. Accuracy Assessment and Error and Uncertainty Analysis
3. Results
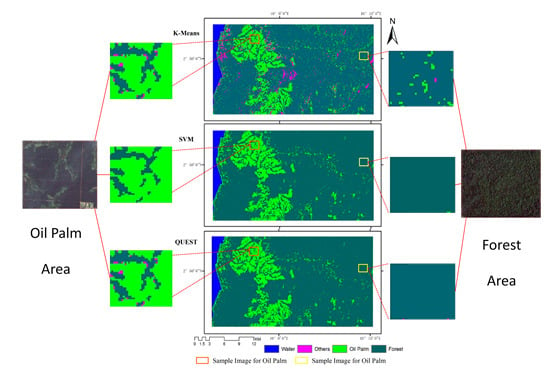
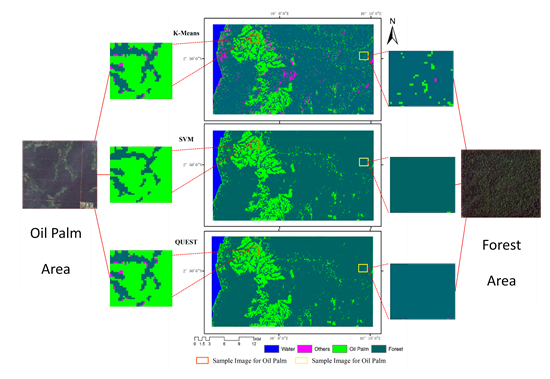
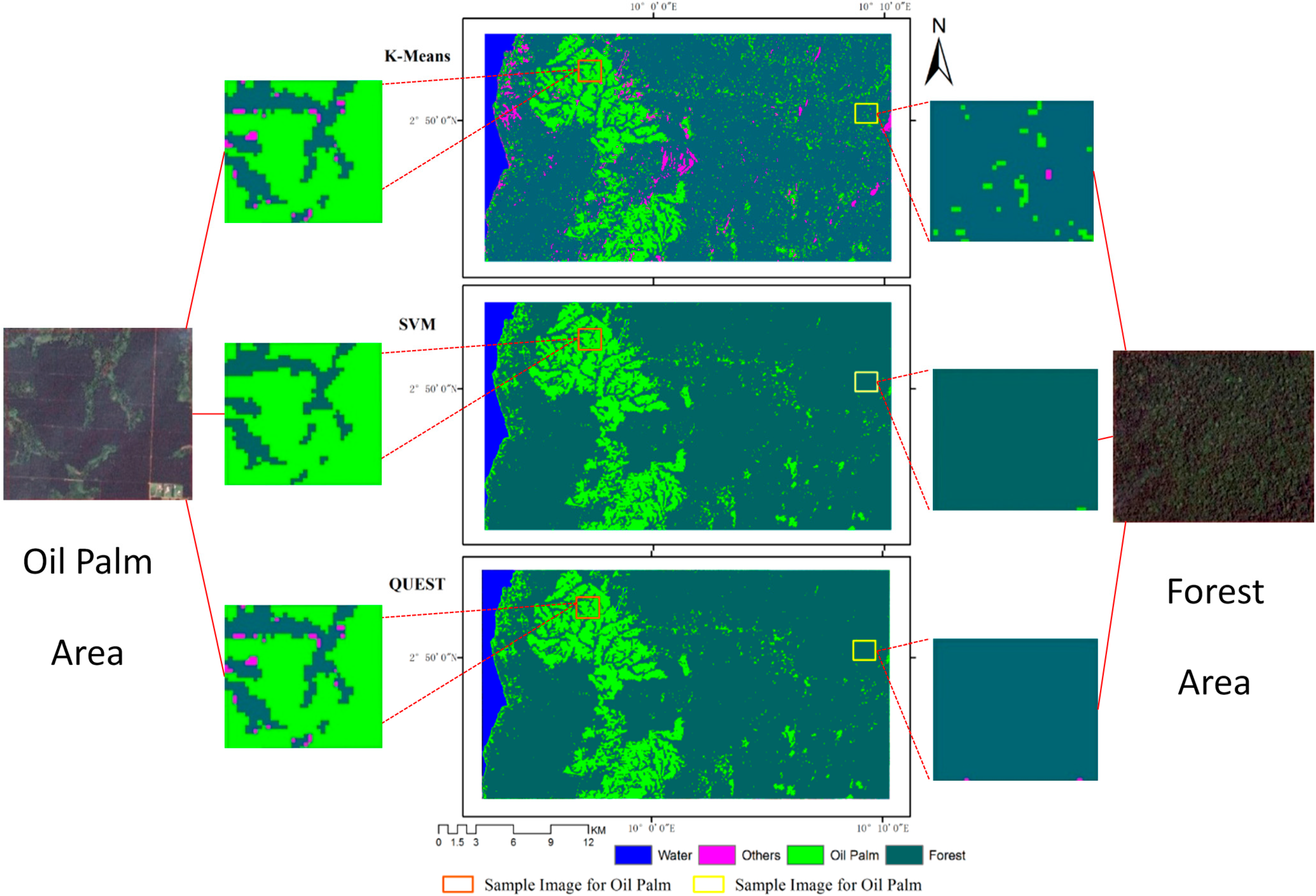
3.1. Oil Palm Plantation Map at 50m Spatial Resolution


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Overall Accuracy (%) | Kappa Coefficient | Class | Ground Truth Samples (Pixels) | Total Classified Pixels | User Acc. (%) | |||
|---|---|---|---|---|---|---|---|---|---|
| Oil Palm | Forests | Water | Other | ||||||
| SVM | 92.34 | 0.8581 | Oil Palm | 1165 | 215 | 0 | 61 | 1441 | 80.84 |
| Forests | 133 | 4580 | 0 | 62 | 4775 | 95.92 | |||
| Water | 0 | 0 | 785 | 12 | 797 | 98.50 | |||
| Other | 0 | 94 | 0 | 427 | 521 | 81.96 | |||
| Total ground truth pixels | 1298 | 4889 | 785 | 562 | 7534 | ||||
| Prod. Acc. (%) | 89.75 | 93.68 | 100 | 75.98 | |||||
| Decision Tree | 92.63 | 0.8650 | Oil Palm | 1157 | 74 | 0 | 57 | 1277 | 89.83 |
| Forests | 46 | 4614 | 0 | 62 | 4733 | 97.71 | |||
| Water | 0 | 0 | 780 | 15 | 795 | 98. 11 | |||
| Other | 95 | 201 | 5 | 428 | 729 | 58.71 | |||
| Total ground truth pixels | 1298 | 4889 | 785 | 562 | 7534 | ||||
| Prod. Acc. (%) | 89.14 | 94.38 | 99.36 | 76. 16 | |||||
| K-Means | 88.28 | 0.7855 | Oil Palm | 1063 | 307 | 0 | 34 | 1404 | 75.71 |
| Forests | 235 | 4378 | 0 | 79 | 4692 | 93.31 | |||
| Water | 0 | 0 | 783 | 22 | 805 | 97.27 | |||
| Other | 0 | 204 | 2 | 427 | 633 | 67.46 | |||
| Total ground truth pixels | 1298 | 4889 | 785 | 562 | 7534 | ||||
| Prod. Acc. (%) | 81.90 | 89.55 | 99.75 | 75.98 | |||||
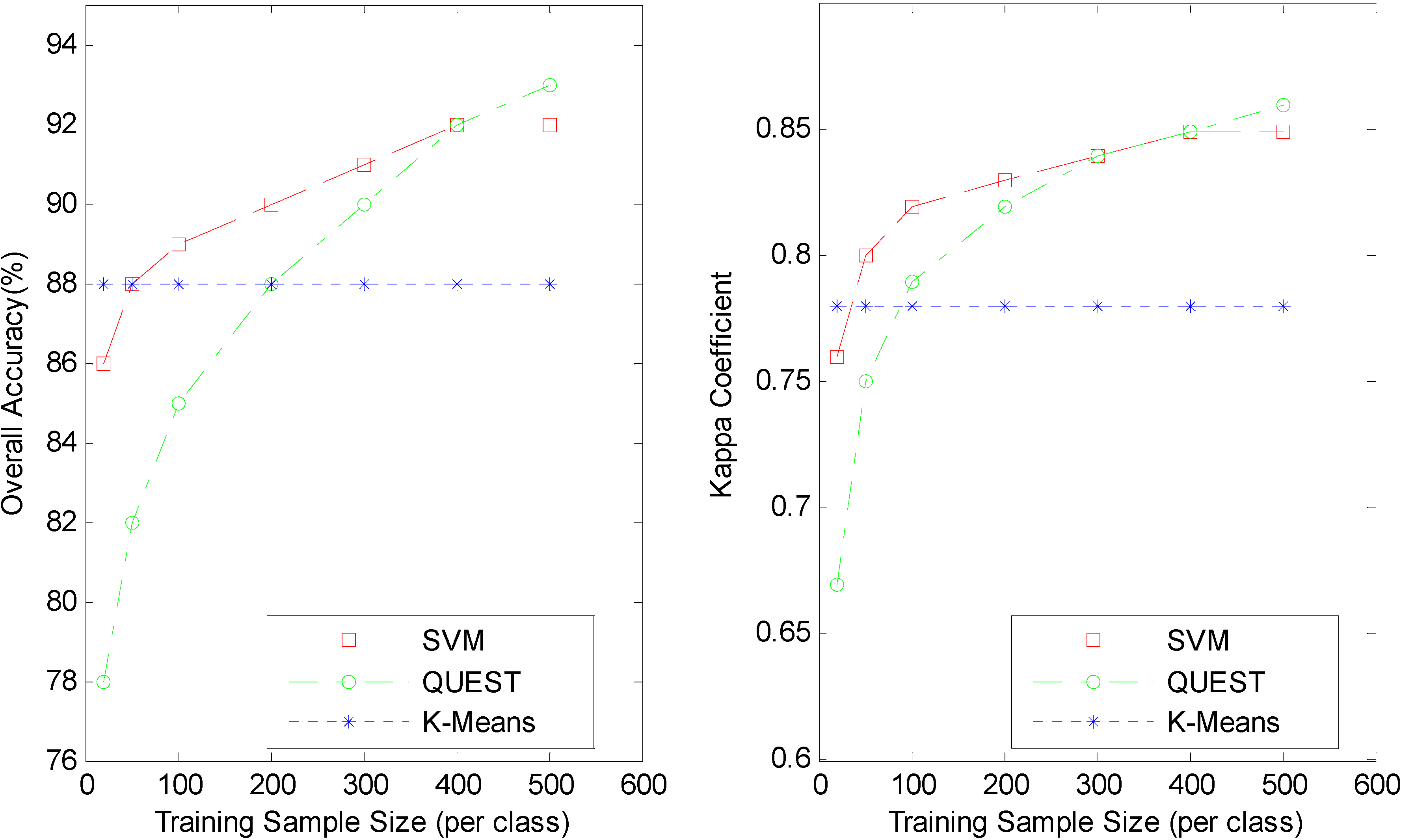
3.2. Accuracy Assessment with Various Sizes of Training Samples and McNemar’s Test

| Size of Training Samples | 20 Pixels (Per Class) | 50 Pixels (Per Class) | 100 Pixels (Per Class) | 200 Pixels (Per Class) | 300 Pixels (Per Class) | 400 Pixels (Per Class) | 500 Pixels (Per Class) |
|---|---|---|---|---|---|---|---|
| SVM vs. Decision Tree | 18.987 | 11.932 | 9.379 | 6.432 | 2.763 | 1.846 | −0.757 |
| SVM vs. K-Means | −5.125 | −2.067 | 1.856 | 6.023 | 7.324 | 7.241 | 8.097 |
| Decision Tree vs. K-Means | −19.964 | −14.265 | −10.278 | −9.032 | −5.867 | 5.247 | 8.290 |
4. Discussion
4.1. Source of Uncertainty and Errors in the Oil Palm Map
4.2. Potential Application of These Classification Methods
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Frank, N.E.G.; Albert, M.M.E.; Laverdure, D.E.E.; Paul, K. Assessment of the quality of crude palm oil from smallholders in Cameroon. J. Stored Prod. Postharvest Res. 2011, 2, 52–58. [Google Scholar]
- Feintrenie, L. Oil palm in Cameroon: Risks and opportunities. Nat. Faune 2012, 26, 23–27. [Google Scholar]
- Hoyle, D.; Levang, P. Oil Palm Development in Cameroon; WWF/IRD/CIFOR Report; WWF: Gland, Switzerland, 2012; p. 16. [Google Scholar]
- Carlson, K.M.; Curran, L.M.; Ratnasari, D.; Pittman, A.M.; Soares-Filh, B.S.; Asner, G.P.; Trigg, S.N.; Gaveau, D.A.; Lawrence, D.; Rodrigues, H.O. Committed carbon emissions, deforestation, and community land conversion from oil palm plantation expansion in West Kalimantan, Indonesia. Proc. Natl. Acad. Sci. USA 2012, 109, 7559–7564. [Google Scholar] [CrossRef] [PubMed]
- Sheil, D.; Casson, A.; Meijaard, E.; van Nordwijk, M.; Gaskell, J.; Sunderland-Groves, J.; Wertz, K.; Kanninen, M. The Impacts and Opportunities of Oil Palm in Southeast Asia: What do We Know and What do We Need to Know? CIFOR Report; Center for International Forestry Research (CIFOR): Bogor, Indonesia, 2009; p. 67. [Google Scholar]
- Jeffrey, S.; Jaboury, G.; Paul, N.; Agni, K.B. Oil palm expansion transforms tropical landscapes and livelihoods. Glob. Food Secur. 2012, 1, 114–119. [Google Scholar] [CrossRef]
- Jusoff, K.; Setiawan, I. Quantifying deforestation in a permanent forest reserve using vectorised Landsat TM. J. Trop. For. Sci. 2003, 15, 570–582. [Google Scholar]
- Naert, B.; Gal, R.; Lubis, A.U.; Suwandi, D.; Olivin, J. Preliminary assessment of the possibilities of using spatial remote-sensing to study developments on an oil palm plantation in North Sumatra. Oleagineux 1990, 45, 201–214. [Google Scholar]
- Santoso, H.; Gunawan, T.; Jatmiko, R.H.; Darmosarkoro, W.; Minasny, B. Mapping and identifying basal stem rot disease in oil palms in North Sumatra with QuickBird imagery. Precis. Agric. 2011, 12, 233–248. [Google Scholar] [CrossRef]
- Tan, K.P.; Kanniah, K.D.; Cracknell, A.P. A review of remote sensing based productivity models and their suitability for studying oil palm productivity in tropical regions. Prog. Phys. Geog. 2012, 36, 655–679. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Stucky, N.; Griscom, B.W.; Ashton, M.S.; Diels, J.; Meer, B.V.D.; Enclona, E. Biomass estimations and carbon stock calculations in the oil palm plantations of African derived savannas using IKONOS data. Int. J. Remote Sens. 2004, 25, 5447–5472. [Google Scholar] [CrossRef]
- Shafri, H.Z.M.; Hamdan, N.; Saripan, M.I. Semi-automatic detection and counting of oil palm trees from high spatial resolution airborne imagery. Int. J. Remote Sens. 2011, 32, 2095–2115. [Google Scholar] [CrossRef]
- Morel, A.C.; Saatchi, S.S.; Malhi, Y.; Berry, N.J.; Banin, L.; Burslem, D.; Nilus, R.; Ong, R.C. Estimating aboveground biomass in forest and oil palm plantation in Sabah, Malaysian Borneo using ALOS PALSAR data. For. Ecol. Manag. 2011, 262, 1786–1798. [Google Scholar] [CrossRef]
- Santos, C.; Messina, J.P. Multi-sensor data fusion for modeling African palm in the Ecuadorian Amazon. Photogramm. Eng. Rem. Sens. 2008, 74, 711–723. [Google Scholar] [CrossRef]
- Gutierrez-Velez, V.H.; DeFries, R.; Pinedo-Vasquez, M.; Uriarte, M.; Padoch, C.; Baethgen, W.; Fernandes, K.; Lim, Y. High-yield oil palm expansion spares land at the expense of forests in the Peruvian Amazon. Environ. Res. Lett. 2011, 6. [Google Scholar] [CrossRef]
- Gutierrez-Velez, V.H.; DeFries, R. Annual multi-resolution detection of land cover conversion to oil palm in the Peruvian Amazon. Remote Sens. Environ. 2013, 129, 154–167. [Google Scholar] [CrossRef]
- Walker, W.S.; Stickler, C.M.; Kellndorfer, J.M.; Kirsch, K.M.; Nepstad, D.C. Large-Area classification and mapping of forest and land cover in the Brazilian Amazon: A comparative analysis of ALOS/PALSAR and Landsat data sources. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 594–604. [Google Scholar] [CrossRef]
- De Grandi, G.; Mayaux, P.; Rauste, Y.; Rosenqvist, A.; Simard, M.; Saatchi, S.S. The global rain forest mapping project JERS-1 Radar mosaic of tropical Africa: Development and product characterization aspects. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2218–2233. [Google Scholar]
- Koo, V.C.; Chan, Y.K.; Gobi, V.; Chua, M.Y.; Lim, C.H.; Lim, C.S.; Thum, C.C.; Lim, T.S.; Ahmad, Z.; Mahmood, K.A.; et al. A new unmanned aerial vehicle synthetic aperture radar for environmental monitoring. Prog. Electromagn. Res. 2012, 122, 245–268. [Google Scholar] [CrossRef]
- Basuki, T.M.; Skidmore, A.K.; Hussin, Y.A.; van Duren, I. Estimating tropical forest biomass more accurately by integrating ALOS PALSAR and Landsat-7 ETM+ data. Int. J. Remote Sens. 2013, 34, 4871–4888. [Google Scholar] [CrossRef]
- Bagan, H.; Kinoshita, T.; Yamagata, Y. Combination of AVNIR-2, PALSAR, and polarimetric parameters for land cover classification. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1318–1328. [Google Scholar] [CrossRef]
- Clewley, D.; Lucas, R.; Accad, A.; Armston, J.; Bowen, M.; Dwyer, J.; Pollock, S.; Bunting, P.; McAlpine, C.; Eyre, T.; et al. An approach to mapping forest growth stages in Queensland, Australia through integration of ALOS PALSAR and Landsat sensor data. Remote Sens. 2012, 4, 2236–2255. [Google Scholar] [CrossRef] [Green Version]
- Dong, J.W.; Xiao, X.M.; Chen, B.Q.; Torbick, N.; Jin, C.; Zhang, G.L.; Biradar, C. Mapping deciduous rubber plantations through integration of PALSAR and multi-temporal Landsat imagery. Remote Sens. Environ. 2013, 134, 392–402. [Google Scholar] [CrossRef]
- Dong, J.W.; Xiao, X.M.; Sheldon, S.; Biradar, C.; Duong, N.D.; Hazarika, M. A comparison of forest cover maps in Mainland Southeast Asia from multiple sources: PALSAR, MERIS, MODIS and FRA. Remote Sens. Environ. 2012, 127, 60–73. [Google Scholar] [CrossRef]
- Li, G.Y.; Lu, D.S.; Moran, E.; Dutra, L.; Batistella, M. A comparative analysis of ALOS PALSAR L-band and RADARSAT-2 C-band data for land-cover classification in a tropical moist region. ISPRS J. Photogramm. Remote Sens. 2012, 70, 26–38. [Google Scholar] [CrossRef]
- Rakwatin, P.; Longepe, N.; Isoguchi, O.; Shimada, M.; Uryu, Y.; Takeuchi, W. Using multiscale texture information from ALOS PALSAR to map tropical forest. Int. J. Remote Sens. 2012, 33, 7727–7746. [Google Scholar] [CrossRef]
- Zhao, C.Y.; Lu, Z.; Zhang, Q.; de la Fuente, J. Large-area landslide detection and monitoring with ALOS/PALSAR imagery data over Northern California and Southern Oregon, USA. Remote Sens. Environ. 2012, 124, 348–359. [Google Scholar] [CrossRef]
- Lehmann, E.A.; Caccetta, P.A.; Zhou, Z.S.; McNeill, S.J.; Wu, X.L.; Mitchell, A.L. Joint processing of Landsat and ALOS-PALSAR data for forest mapping and monitoring. IEEE Trans. Geosci. Remote Sens. 2012, 50, 55–67. [Google Scholar] [CrossRef]
- Kellndorfer, J. Pan-tropical Forest Cover Mapped with Cloud-Free Radar Imaging. Available online: http://www.whrc.org/mapping/pantropical/alos.html (accessed on 12 November 2013).
- Miettinen, J.; Liew, S.C. Separability of insular Southeast Asian woody plantation species in the 50 m resolution ALOS PALSAR mosaic product. Remote Sens. Lett. 2011, 2, 299–307. [Google Scholar] [CrossRef]
- Srestasathiern, P.; Rakwatin, P. Oil palm tree detection with high resolution multi-spectral satellite imagery. Remote Sens. 2014, 6, 9749–9774. [Google Scholar] [CrossRef]
- Japan Aerospace Exploration Agency (JAXA), K&C Mosaic Homepage—PALSAR 50 m Orthorectified Mosaic Product. Available online: http://www.eorc.jaxa.jp/ALOS/en/kc_mosaic/kc_map_50.htm (accessed on 11 May 2014).
- Longepe, N.; Rakwatin, P.; Isoguchi, O.; Shimada, M.; Uryu, Y.; Yulianto, K. Assessment of ALOS PALSAR 50 m Orthorectified FBD data for regional land cover classification by support vector machines. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2135–2150. [Google Scholar] [CrossRef]
- Shimada, M.; Ohtaki, T. Generating large-scale high-quality SAR mosaic datasets: Application to PALSAR data for global monitoring. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 637–656. [Google Scholar] [CrossRef]
- Shimada, M.; Isoguchi, O.; Tadono, T.; Isono, K. PALSAR radiometric and geometric calibration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3915–3932. [Google Scholar] [CrossRef]
- Touzi, R.; Shimada, M. Polarimetric PALSAR calibration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3951–3959. [Google Scholar] [CrossRef]
- Rosenqvist, A.; Shimada, M.; Ito, N.; Watanabe, M. ALOS PALSAR: A pathfinder mission for global-scale monitoring of the environment. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3307–3316. [Google Scholar] [CrossRef]
- Wu, F.; Wang, C.; Zhang, H.; Zhang, B.; Tang, Y.X. Rice crop monitoring in South China with RADARSAT-2 quad-polarization SAR data. IEEE Geosci. Remote Sens. Lett. 2011, 8, 196–200. [Google Scholar] [CrossRef]
- Benedek, C.; Sziranyi, T. Change detection in optical aerial images by a multilayer conditional mixed Markov model. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3416–3430. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Yang, Z.G.; Cohen, W.B. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. LandTrendr—Temporal segmentation algorithms. Remote Sens. Environ. 2010, 114, 2897–2910. [Google Scholar] [CrossRef]
- Cohen, W.B.; Yang, Z.G.; Kennedy, R. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 2. TimeSync—Tools for calibration and validation. Remote Sens. Environ. 2010, 114, 2911–2924. [Google Scholar] [CrossRef]
- Potere, D. Horizontal positional accuracy of Google Earth’s high-resolution imagery archive. Sensors 2008, 8, 7973–7981. [Google Scholar] [CrossRef]
- Richards, J.A.; Jia, X. Remote Sensing Digital Image Analysis: An Introduction, 5rd ed.; Springer-Verlag: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Baghdadi, N.; Boyer, N.; Todoroff, P.; El Hajj, M.; Begue, A. Potential of SAR sensors TerraSAR-X, ASAR/ENVISAT and PALSAR/ALOS for monitoring sugarcane crops on Reunion Island. Remote Sens. Environ. 2009, 113, 1724–1738. [Google Scholar] [CrossRef]
- Jengo, C. RuleGen Spatial Analysis ENVI Module (Version 1.02). Available online: http://wwwittviscom/codebank/searchasp?FID=295 (accessed on 22 October 2011).
- Erener, A. Classification method, spectral diversity, band combination and accuracy assessment evaluation for urban feature detection. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 397–408. [Google Scholar] [CrossRef]
- Schwert, B.; Rogan, J.; Giner, N.M.; Ogneva-Himmelberger, Y.; Blanchard, S.D.; Woodcock, C. A comparison of support vector machines and manual change detection for land-cover map updating in Massachusetts, USA. Remote Sens. Lett. 2013, 4, 882–890. [Google Scholar] [CrossRef]
- Dixon, B.; Candade, N. Multispectral landuse classification using neural networks and support vector machines: One or the other, or both? Int. J. Remote Sens. 2008, 29, 1185–1206. [Google Scholar] [CrossRef]
- Petropoulos, G.P.; Kalaitzidis, C.; Vadrevu, K.P. Support vector machines and object-based classification for obtaining land-use/cover cartography from Hyperion hyperspectral imagery. Comput. Geosci. 2012, 41, 99–107. [Google Scholar] [CrossRef]
- Cherkassky, V.; Ma, Y.Q. Practical selection of SVM parameters and noise estimation for SVM regression. Neural Netw. 2004, 17, 113–126. [Google Scholar] [CrossRef] [PubMed]
- Guide EUs. ENVI On-Line Software User’s Manual. Available online: http://www.exelisvis.com/docs/home.html (accessed on 19 January 2015).
- McNemar, Q. Note on the sampling error of the difference between correlated proportions or percentages. Psychometrika 1947, 12, 153–157. [Google Scholar] [CrossRef] [PubMed]
- Braun, A.C.; Weidner, U.; Hinz, S. Classification in high-dimensional feature spaces-assessment using SVM, IVM and RVM with focus on simulated EnMAPdata. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 436–443. [Google Scholar] [CrossRef]
- Koc-San, D. Evaluation of different classification techniques for the detection of glass and plastic greenhouses from WorldView-2 satellite imagery. J. Appl. Remote Sens. 2013, 7, 073553: 1–073553:20. [Google Scholar] [CrossRef]
- Rosenqvist, Å. Evaluation of JERS-1, ERS-1 and Almaz SAR backscatter for rubber and oil palm stands in West Malaysia. Int. J. Remote Sens. 1996, 17, 3219–3231. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Dong, J.; Njeudeng Tenku, S.; Xiao, X. Mapping Oil Palm Plantations in Cameroon Using PALSAR 50-m Orthorectified Mosaic Images. Remote Sens. 2015, 7, 1206-1224. https://doi.org/10.3390/rs70201206
Li L, Dong J, Njeudeng Tenku S, Xiao X. Mapping Oil Palm Plantations in Cameroon Using PALSAR 50-m Orthorectified Mosaic Images. Remote Sensing. 2015; 7(2):1206-1224. https://doi.org/10.3390/rs70201206
Chicago/Turabian StyleLi, Li, Jinwei Dong, Simon Njeudeng Tenku, and Xiangming Xiao. 2015. "Mapping Oil Palm Plantations in Cameroon Using PALSAR 50-m Orthorectified Mosaic Images" Remote Sensing 7, no. 2: 1206-1224. https://doi.org/10.3390/rs70201206