ALS or airborne mapping lidar has become the de facto standard remote sensing technique to obtain ground surface elevations underneath forest and vegetation canopies and it has enabled multiple scientific applications in fields that range from archaeology to tectonics [
1]. It has also been used extensively for forestry studies over both large scales [
45] and for individual tree detection and biophysical parameter estimation [
46,
47]. Two important capabilities of ALS systems related to forested environments concern both the ability of the laser signal to penetrate the canopy to produce accurate and dense ground returns and the ability to finely and precisely define the vertical structure of the canopy (related to range resolution). The following sections will present and discuss experimental results aimed at characterizing the performance of the Titan sensor with respect to canopy penetration and laser range resolution in vegetated environments. The tests for these characteristics were performed in the tropical rain forests of Central America and Mexico. The complex and thick canopies of these forests represent the most challenging and, thus, the ideal location to perform these assessments. It is important to note that the data used for the following analyses comes from the analogue discrete detector of the Titan. In theory, if similar analyses were performed from data derived from the analysis of full waveform returns, the performance of the system could be better. However, the analyses using the waveform data are outside the scope of this paper.
3.3.1. Canopy Penetration
There have been several experiments aimed at understanding the influence of sensor configuration and forest physical parameters on the canopy penetration performance for lidar systems [
48,
49,
50,
51,
52]. All of these experiments have produced interesting and promising results; however, these studies have been limited in several aspects: (a) they analyze canopy penetration by isolating one system or flight parameter at a time without considering the tradeoff between different parameters (altitude, PRF, divergence, etc.); (b) they have been performed for a single homogenous study area; (c) while they provide metrics on the detection of ground returns as a ratio of ground returns to total returns, these metrics do not account for how much of the target area was illuminated or how the energy per pulse varies as a function of the system PRF; (d) finally, they analyze data collected from single sensors that are from older technological generation(s) and are not representative of the current state-of-the-art.
NCALM has conducted similar experiments aimed at understanding how to optimize the configuration of lidar systems to maximize the detection of ground returns through canopies in different types of forests [
53]. Besides conducting canopy penetration experiments in different kinds of forested environments, NCALM experiments are unique because emphasis has been placed on understanding the pulse energy characteristics of the laser source as a function of the pulse repetition frequency. Previously reported experiments [
53] were performed with legacy lidar systems (Optech 3100, Gemini and Aquarius). These systems were powered by Q-switched solid-state laser sources. An operational characteristic of such laser sources is that the output laser energy of each laser pulse decreases when the PRF is increased [
53]. Based on this characteristic, maximizing canopy penetration with these older systems is achieved by a tradeoff between illuminating as much of the target area as possible, which is directly proportional to the PRF while maintaining enough energy per pulse to ensure the round trip of the laser pulse through the canopy and back to the sensor (which is inversely proportional to the PRF). Of course, both of these factors are also affected by the flying height of the system. An advantage of the Titan fiber laser sources is that the energy per pulse does not degrade significantly as the PRF increases (
Table 1).
The experiments conducted to date with the Titan, the results of which are presented in
Table 6 below, reinforce the importance of the energy budget for canopy penetration. However, the energy characteristics of the Titan laser sources allow for good canopy penetration even at high PRFs. Similar to the bathymetric performance tests, these canopy penetration tests are conducted by flying the same flight line over a densely vegetated area several times with varying PRFs and/or flying heights. These experiments have been performed in the tropical forest near the archeological sites of Calakmul in Campeche, Mexico (test area 280,020 m
2), Lamanai in central Belize (test area 640,726 m
2) and El Ceibal in el Petén, Guatemala (test area 407,694 m
2). Once the point cloud data were produced for each of the test flight strips, data samples common to all of the test strips were cropped to produce identical areas that were then processed to obtain shot and return statistics including ground return statistics. The returns are processed to obtain ground returns using the Axelsson algorithm [
54] implemented in the Terrasolid Terrascan software. For consistency, all the above described test areas have been processed using the same classification parameters (maximum building size 30 m, maximum terrain angle 88°, maximum iteration angle 12°, maximum iteration distance 3 m). The statistical results recorded for these experiments include: the number of laser shots fired, the number of first, second, third and last returns obtained, the number of returns per fired shot, the number of ground returns detected, the fraction of shots that produced secondary, tertiary, last and ground returns, as well as the associated densities. All of these metrics were analyzed, but for brevity only a subset of these are summarized in
Table 6.
As previously stated, to ensure good canopy penetration and good ground sampling, it is important that there is enough energy per laser pulse to ensure two-way travel from the sensor to the ground and back. In a complex multi-story canopy this also translates into the ability of the sensor to detect multiple returns as the laser pulse propagates through the canopy. This is why
Table 6 includes information related to the average number of returns produced per laser pulse. The higher the number of returns per pulse, the higher the probability that a fraction of those returns will be from the ground. The table also presents the number of returns that were classified as ground by the Axelsson algorithm as well as a fraction of returns for which ground returns were detected; it also summarizes the shot and ground return densities.
The first seven rows in
Table 6 present results from tests performed in Calakmul and compare results obtained with the Optech Gemini (rows two to four) and Titan lidar sensors (rows five to seven). The Gemini data were collected on 23–24 May 2014 and the Titan data were collected on 18 May 2016. All data were collected from a flying height of 500 m above ground level. The results for the Gemini data are meant to illustrate how the canopy penetration performance for that sensor degraded as the system PRF was increased while all other parameters remained constant. The results indicate a reduction of 22% in the number of returns produced per laser shot when the PRF is increased from 70 kHz to 125 kHz. Perhaps more important was a reduction of 65% in the number of shots that produced ground returns which varied from 26.9% of shots at 70 kHz to only 9.4% of shots at 125 kHz. Another interesting comparison is that despite a shot density that was more than double for the 125 kHz (as compared to 70 kHz), the ground return density was 20% higher for the 70 kHz test line. This last comparison illustrates that for canopy penetration and ground return detection, it is not the quantity of fired laser shots that matters but, more importantly, the quality of the shots, which is determined by the energy contained in each laser pulse.
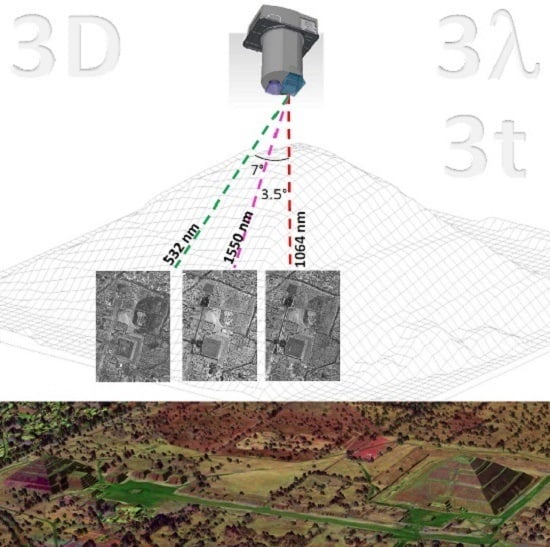
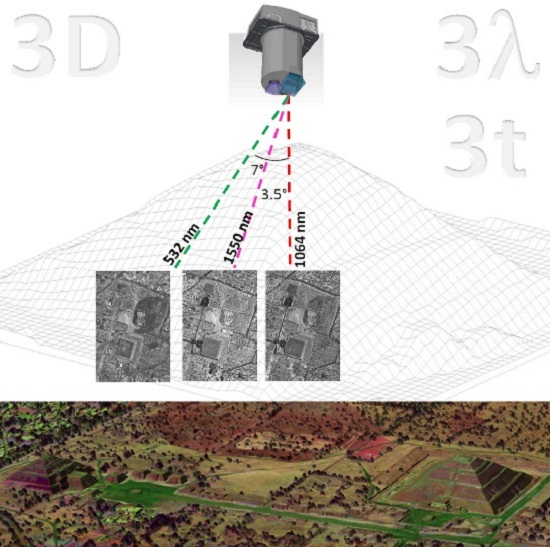
The Titan data for the Calakmul test area is not directly comparable to the Gemini data due to the temporal separation between the collections, which was compounded by a severe drought that hit the region after 2014. However, it is worth highlighting certain key points in the comparison of the Titan and Gemini data for Calakmul. First, despite the thinner canopy during the Titan collection as a result of the drought, the number of returns per laser pulse obtained in all of the channels of the Titan sensor is higher than the comparable results obtained with the Gemini at the same system PRF of 100 kHz, and for that matter, to all tested Gemini PRFs (70, 100 and 125 kHz). Second, the results from the Titan data are separated by channel. This is important because (a) each channel has different beam divergences and pulse energy values, which modify the energy density of their resultant footprint; and (b) each channel has different look angles, as previously described. Even if energy or power density were the same for all channels, the imaging geometry of the channel pointing at the nadir enables better canopy penetration performance as compared to the channels that look forward of the nadir. This factor can be observed in the test results summarized in
Table 6 where, for a given test, the statistics for ground returns per laser shot and ground return density for channel 2 (C2, which points to the nadir) are higher than the results for the other channels. Note that this is true for the results presented for the Calkamul and the Lamanai test sites, but it is not the case for the El Ceibal test site due to technical malfunctions that will be expanded below.
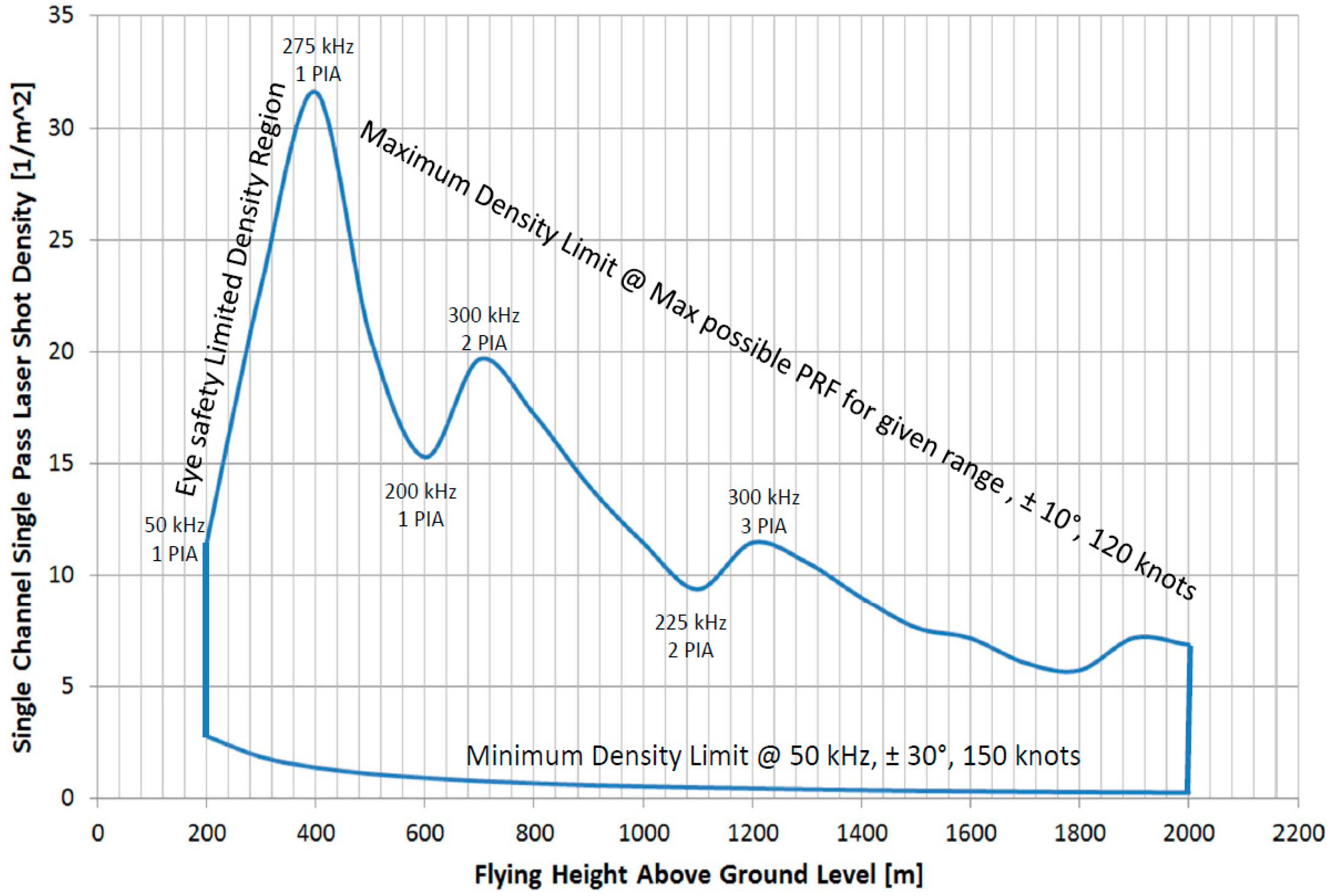
The Lamani test was conducted to characterize the canopy penetration performance of the Titan as a function of the system PRF and to determine the optimal configuration (height and PRF) that maximized the detection of ground returns. The same test line was flown three different times at PRFs that are representative of the operational envelope of the Titan: 75 kHz, 175 kHz and 300 kHz. Because of the range ambiguity region, the 300 kHz test flight had to be collected at 650 m above ground which is considerably higher than the 550 m that was used for the test collections at 75 and 175 kHz. However, these combinations of PRF and height are close to the normal operational conditions that would be used in a survey project. The first conclusion from analyzing the Lamanai test results is that the number of returns produced per laser shot does not vary as much for the Titan as they did for the earlier-generation Gemini sensor. This is mostly true for channels 2 and 3, for which the energy per pulse characteristics do not vary much with the increasing PRF. The number of returns per pulse varied by only about 7.5% for channel 2 (1064 nm) and 4% for channel 3 (532 nm). The energy pulse characteristics of the laser source for channel 1 (1550 nm) do degrade by a small amount with increasing pulse repetition rates but not as widely as the solid-state source that powered the Gemini lidar. The variation in the number of returns produced per pulse for channel 1 only varied by 20% from 75 kHz all the way to 300 kHz (225 kHz), which is close to the 22% variation observed for the Gemini sensor for a 55 kHz variation of PRF.
A second lesson derived from the Lamanai results is that the fraction of laser shots that produce detectable ground returns is significantly affected by the lower energy per pulse and the need to fly at higher altitudes at the higher end of the PRF operational range (300 kHz) when compared to the fraction of laser shots obtained at the lower PRFs. For channel 1, for which the pulse energy characteristics are the most affected with increased PRF, the variation in the fraction of pulses with detectable ground returns was 49.3% between the test line flown at 650 m and 300 kHz and the line flown at 550 m and 75 kHz. For channels 2 and 3, the variation in the results for the same metric of the fraction of shots with ground returns and for the same configurations listed above was close of 31.5% and 28.6%, respectively. The same conclusion can be reached by analyzing the return and ground return density metrics. While the line flown at 300 kHz produces much higher shot densities, the highest ground return densities were obtained from the line flown at 175 kHz and at lower elevation. This demonstrates again that it is not the quantity of the shots that produce the higher number of ground returns but the quality of the shots, which is determined by the energy budget (energy per pulse and ranging distance).
The El Ceibal test was conducted to characterize the canopy penetration performance of the Titan sensor at varying flying heights above the ground. As mentioned earlier, when this test was performed, the optical energy output of the laser source that powers channels 2 and 3 was starting to degrade. The laser source was repaired by the laser manufacturer after the completion of the Guatemala and Mexico mapping campaign (see
Table 1). In addition, the receiver optics of channel 2 were out of alignment (this issue was also corrected after the laser source was replaced), which also caused a degraded canopy penetration performance. The results from this test, while not representative in absolute terms of nominal sensor performance, do provide comparative performance metrics and important insights into canopy penetration. This test was conducted by flying the same line at different heights above the ground while maintaining the system PRF at 150 kHz. A pair of lines was also flown at the maximum test height of 700 m above the terrain but at two different PRFs (100 and 150 kHz).
By comparing the results of the test lines flown at 100 and 150 kHz from 700 m above ground level, a few of the previous conclusions are reinforced. Based on the returns per shot and shots that produced ground return metrics, it can be noted that while the performances for channels 2 and 3 do not vary significantly between PRF settings, the performance of channel 1 does vary slightly with better performance at the lower PRF. The lines flown at 700, 600 and 400 m confirm the expected trend: the metrics of returns per laser pulse and pulses with detected ground returns increase as the flying height decreases. This is due to the spreading of the laser energy during its two-way trip from the sensor to the ground and back, as a function of the range to the fourth power (R
4) as defined by the lidar equation [
1]. These results from the El Ceibal test serve to reinforce the conclusion that canopy penetration for the production of ground returns is mostly dominated by energy considerations. There has to be enough energy within each pulse to withstand the two-way attenuation caused by its normal propagation through the atmosphere and by the scattering of the forest canopies. When trying to maximize ground detection (maximize ground return density), it is important to optimize the tradeoff between surface illumination, which is related to shot density (determined by system PRFs and flying height), and the laser energy budget, which is affected by the laser source pulse energy characteristics and by the flying height.
It is important to note that a research group in Canada has used Titan data and other multi-sensor lidar data to assess the impact of multispectral lidar data on forestry studies [
35]. They have observed similar return ratio differences among the Titan channels as the ones presented in this section. However, they conclude that these differences are mainly due to the wavelength-dependent characteristics of penetration, absorption and reflection of the forest canopies. While the spectral dependence of the light and matter interactions are definitely a factor, the researchers neglect the hardware characteristics such as energy per pulse, beam divergence, power density and look angles that vary from channel to channel, and which also have a significant impact on the system’s ability to map the forest canopies.
3.3.2. Range Resolution/Canopy Characterization
Another important operational performance characteristic of a lidar is the system range resolution, which is defined as the ability of a sensor to separate targets along the range direction within a single lidar footprint. This assumes that the targets are illuminated by the same laser pulse/footprint and that the first target(s) do not completely occlude the laser footprint. As a proxy, because of the narrow birds-eye-view scanning geometry of airborne lidar systems, the range resolution can be simplified to be approximately equivalent to the vertical resolution capability of the lidar. This characteristic is important for applications in forestry or ecology where researchers are interested in describing the canopy structure accurately to model habitats [
55] or to assess biomass [
56]. It is also important when trying to obtain reliable ground returns in areas covered by vegetation. It is well known that the range resolution of a sensor is mainly determined by the laser pulse width [
57]; however, it also depends on other factors including the electronic characteristics of the detector sub-systems. While some laboratory experiments have been conducted to assess the range resolution of lidar systems [
58], a field experimental approach was taken to assess the Titan’s range resolution and ability to finely characterize forest canopies. This field approach consisted of computing the range separation between successive returns for the same laser pulse generated by tropical forest canopies. The same test data that were used to characterize canopy penetration obtained from the forest canopies near Calakmul, Lamanai and El Ceibal were used for this purpose. Data from all of the test flights were analyzed; however, for brevity, only some returns are presented and discussed in the following paragraphs.
First, the discrete return data were segregated and classified depending on the number of returns produced per pulse. Because of its four-stop recording capability, the Titan data can be segregated into four groups: pulses with single returns, pulses with only two returns, pulses with three returns and pulses with more than three returns. For this analysis, the groups of pulses with two returns and the pulses with more than three returns were selected as representing the extreme cases. The pulses that produced more than three returns were the ones that traveled through a significant cross-section of canopy, while the ones with only two returns and that have a relatively short inter-return separation (case analyzed here) likely did not interact much with the canopy structure. It is important to note that in this type of field experiment, the actual distribution of the separation between returns is determined by the canopy structure. However, the lowest percentile values for the separation between returns are determined by the system capabilities. In essence, this analysis is aimed at determining the minimum separations that were detected by the sensor.
Table 7 and
Table 8 summarize results from the analysis of the data collected near Calakmul and Lamani for different test configurations and for the different Titan channels. These tables present statistics for the number of shots that produced two, three and more than three returns. They also present the values for the minimum as well as the one and three percentile distribution values for the detected return separations for the two cases (shots with only two returns and shots with more than three returns). For the case of shots that produced more than three returns, the minimum and percentile values are presented for the separation between the first and second returns, the second and third returns, and the third and last returns. The last returns are not necessarily a fourth return; it could have been a fifth, sixth, seventh or even higher return. The Titan can detect multiple returns within its range gate, but only records the first three and the last return.
Table 7 presents results from the Calakmul test and also compares the range resolution of the Titan with respect to the older-generation Gemini sensor. The results summarized in the
Table 7 show some significant trends. First, the values for the minimum separation between returns, while consistent with the theoretical minimum range resolution value (equivalent to half of the laser pulse width) can be outliers and have to be treated with caution. For this reason, first and third percentile measurements are reported. Second, irrespective of the minimum values, the separation between returns for the Gemini sensor increase as the PRF increases. These results are expected as the laser source for that system produces pulses with increasing width as the PRF is increased. Finally, from the last three columns that correspond to the results obtained from Titan data, it can be observed that while there is a small variation in the range resolution between the different channels, this variation is usually less than 10 cm in most cases and the range resolutions for channel 1 and channel 3 are almost the same.
Table 8 summarizes the results from the range resolution experiments conducted near Lamanai, Belize, which were aimed at assessing performance differences related to changing PRF values. Because results for all channels and all PRFs tested would not fit in the table below, only the results for channels 1 and 2 are presented, given that the range resolutions results for channel 1 and 3 have already been shown to be comparable (
Table 7). The most important conclusion that can be drawn from the data presented in
Table 8 is that the range resolution for the Titan system is not significantly affected by the selection of system PRF, which is different from the result for the Gemini sensor. Also, as noted from the data of the previous table, the variation between Titan channels is less than 10 cm in most cases.
A final crucial observation that can be made based on the results presented in both
Table 7 and
Table 8, particularly from the range resolution results of those pulses that produce more than three returns, is that as the system detects returns from deeper within the canopy, the range resolution is degraded. This would perhaps indicate that the ability to detect and discriminate closely spaced pulses is a function of the received signal strength.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}