Figure 1.
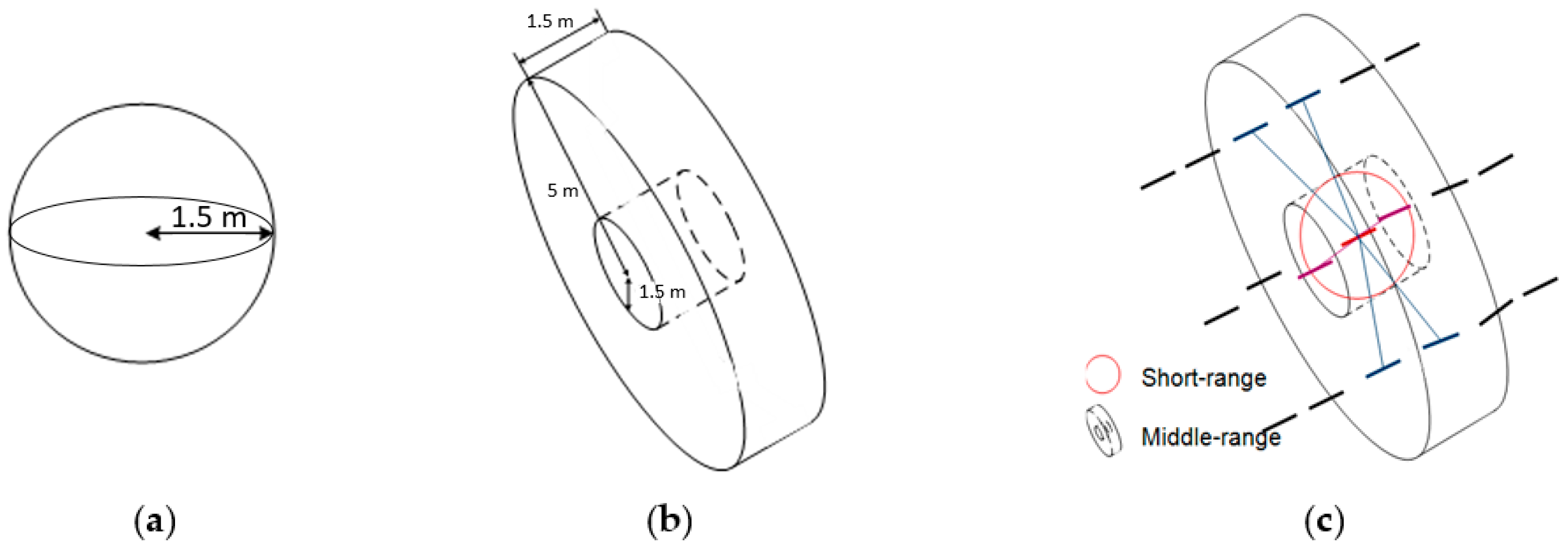
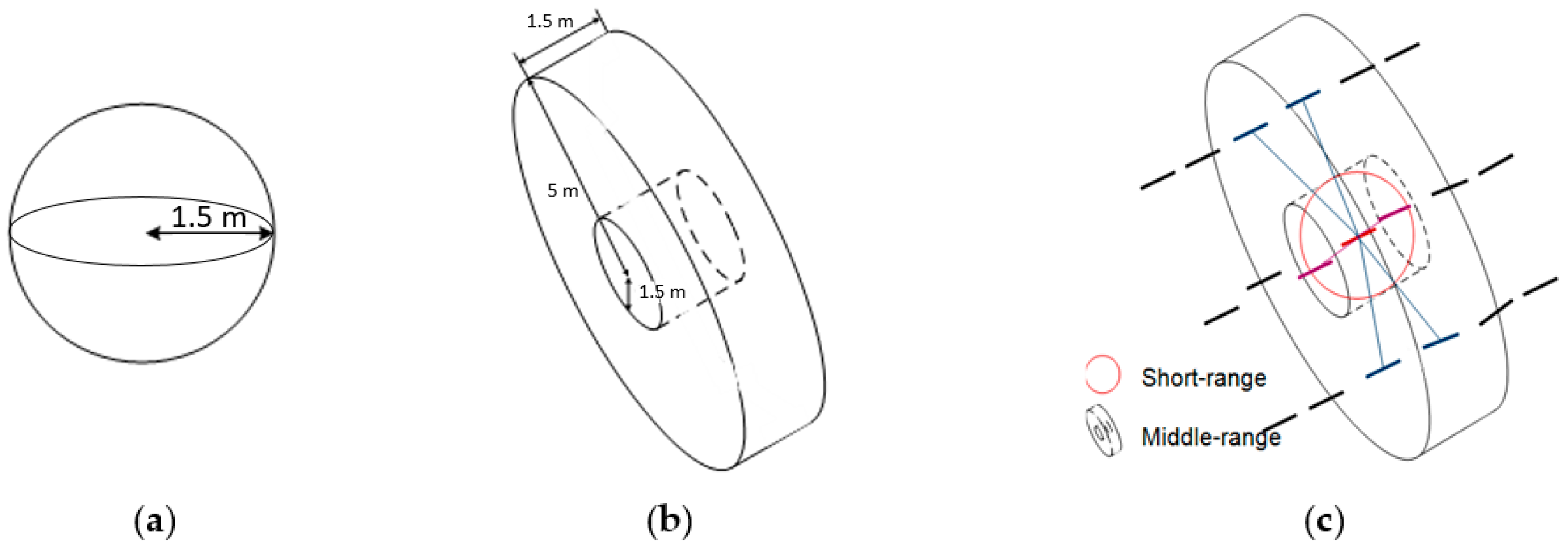
Neighboring systems: (a) for short-range graph; (b) for long-range graph; and (c) combined neighboring systems.
Figure 1.
Neighboring systems: (a) for short-range graph; (b) for long-range graph; and (c) combined neighboring systems.
Figure 2.
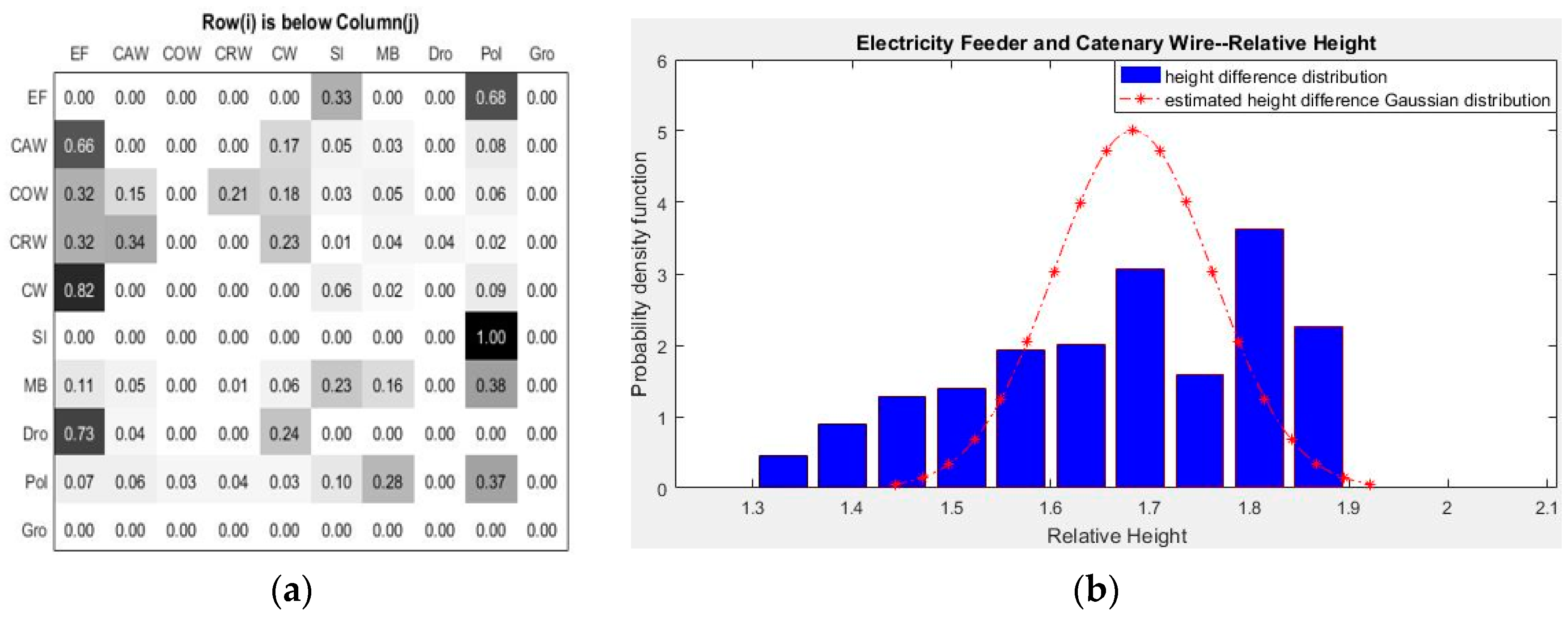
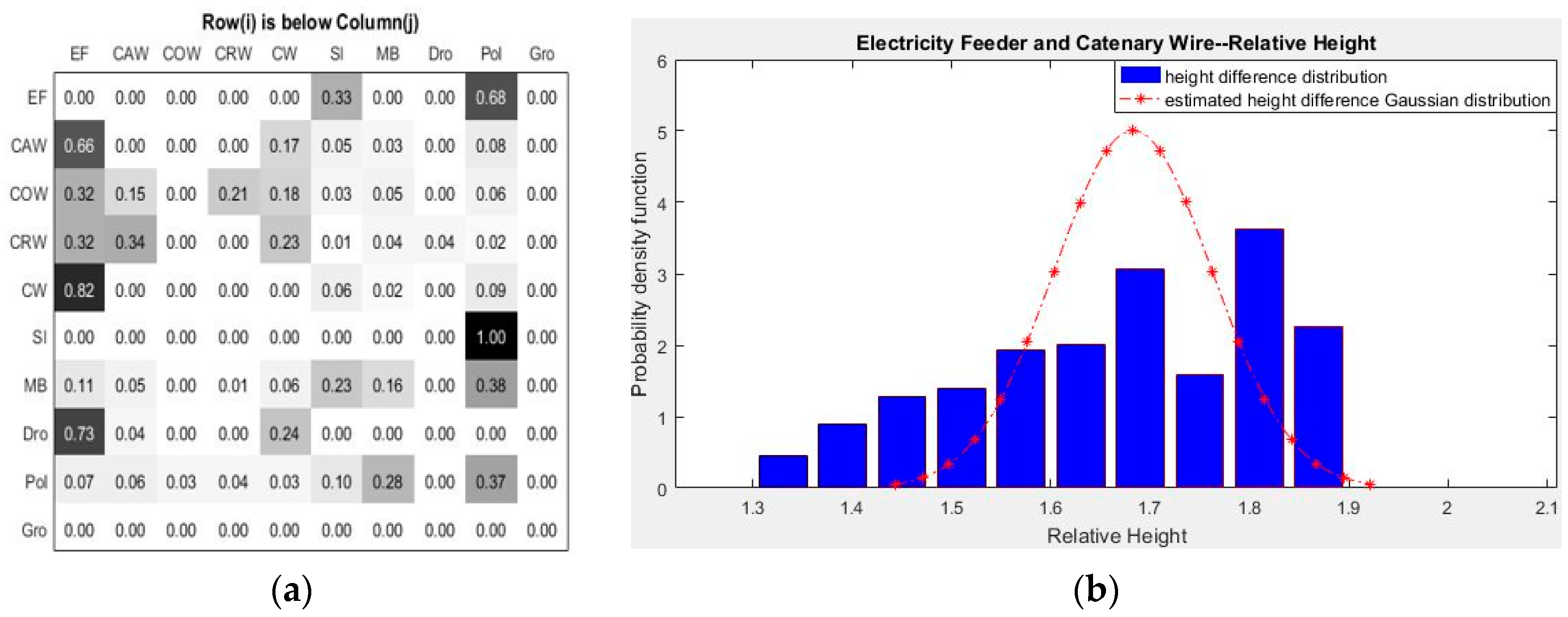
Prior and likelihood estimation of the vertical long-range pairwise potential: (a) look-up table where row i is below column j; and (b) probability density distribution of the height difference (red curve: estimated Gaussian distribution learned from the training data).
Figure 2.
Prior and likelihood estimation of the vertical long-range pairwise potential: (a) look-up table where row i is below column j; and (b) probability density distribution of the height difference (red curve: estimated Gaussian distribution learned from the training data).
Figure 3.
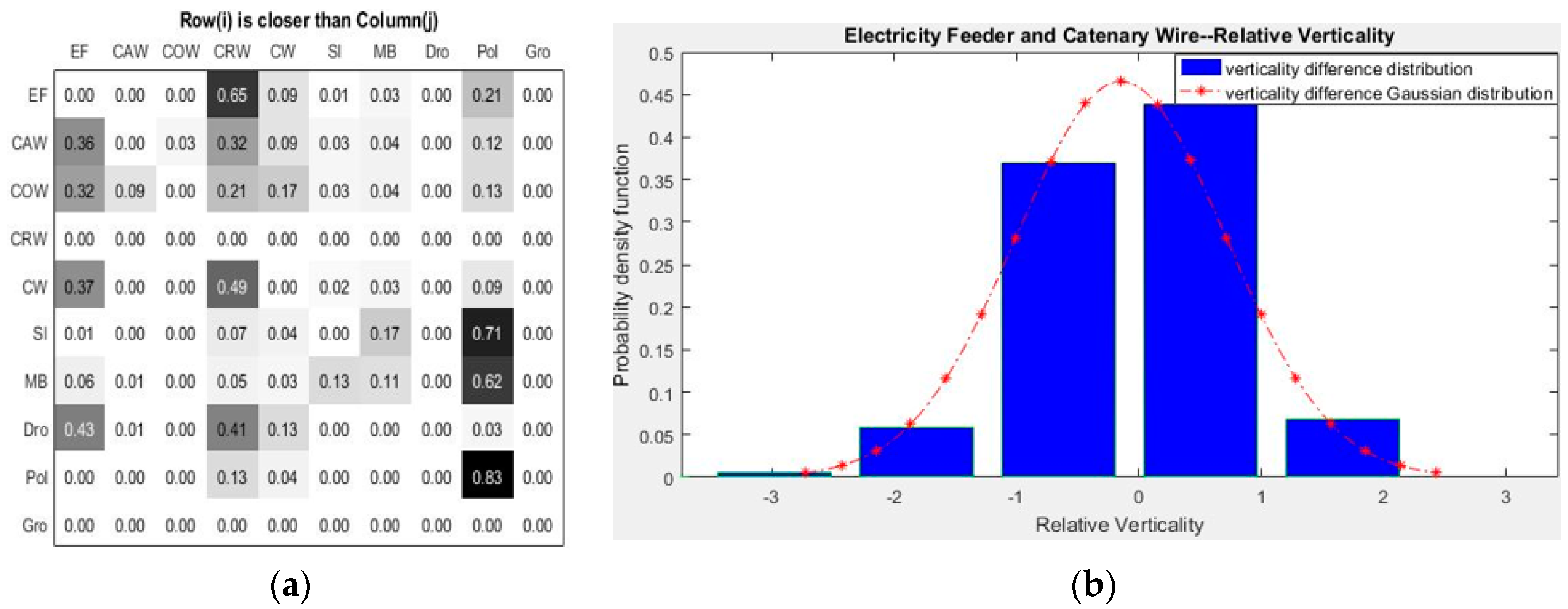
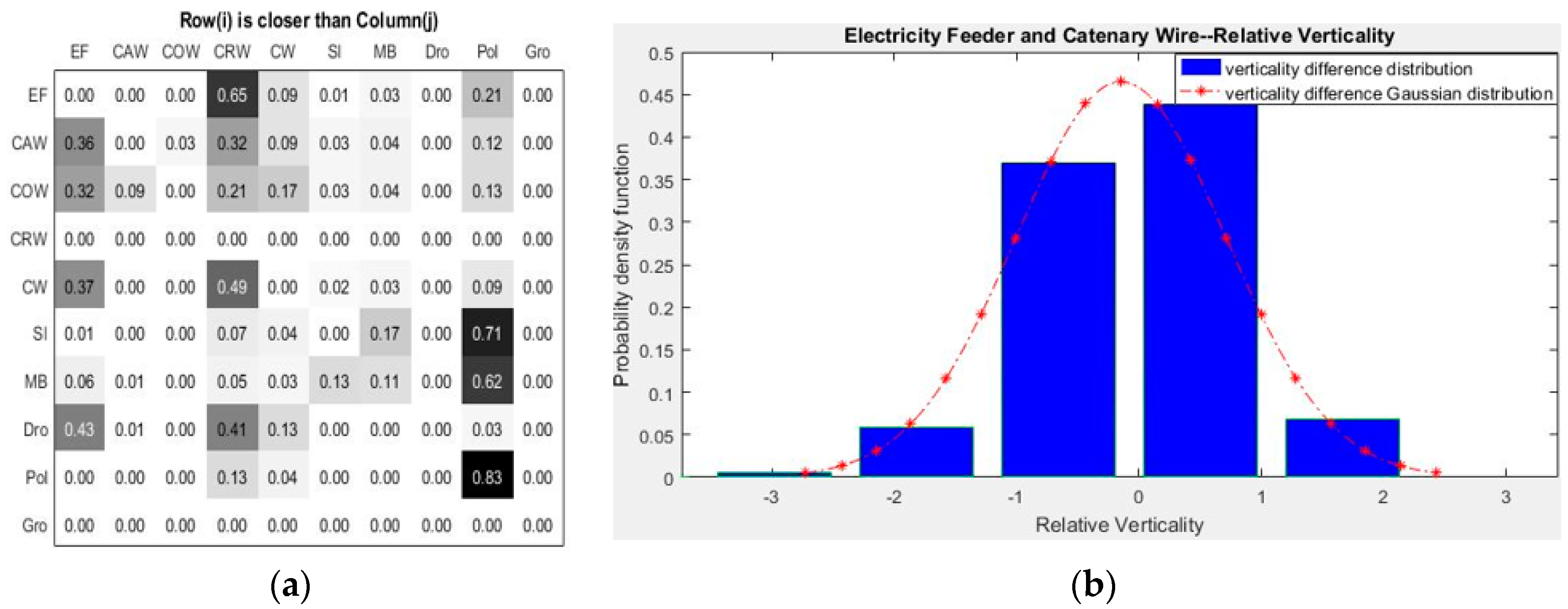
Prior and likelihood estimation of the horizontal long-range pairwise potential: (a) look-up table where row i is closer to the railway than column j; and (b) probability density distribution of the verticality difference (red curve: estimated Gaussian distribution learned from training data).
Figure 3.
Prior and likelihood estimation of the horizontal long-range pairwise potential: (a) look-up table where row i is closer to the railway than column j; and (b) probability density distribution of the verticality difference (red curve: estimated Gaussian distribution learned from training data).
Figure 4.
Trimble MX8 mounted on a train.
Figure 4.
Trimble MX8 mounted on a train.
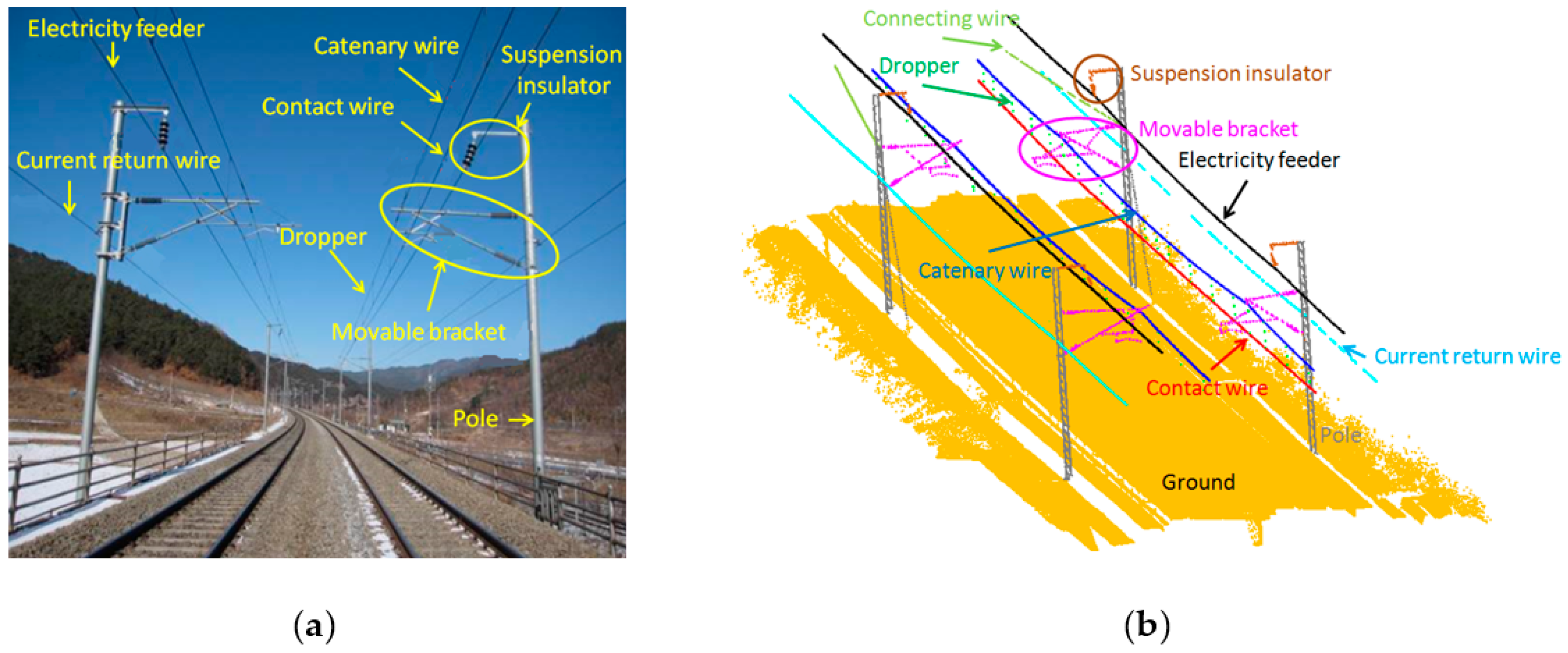
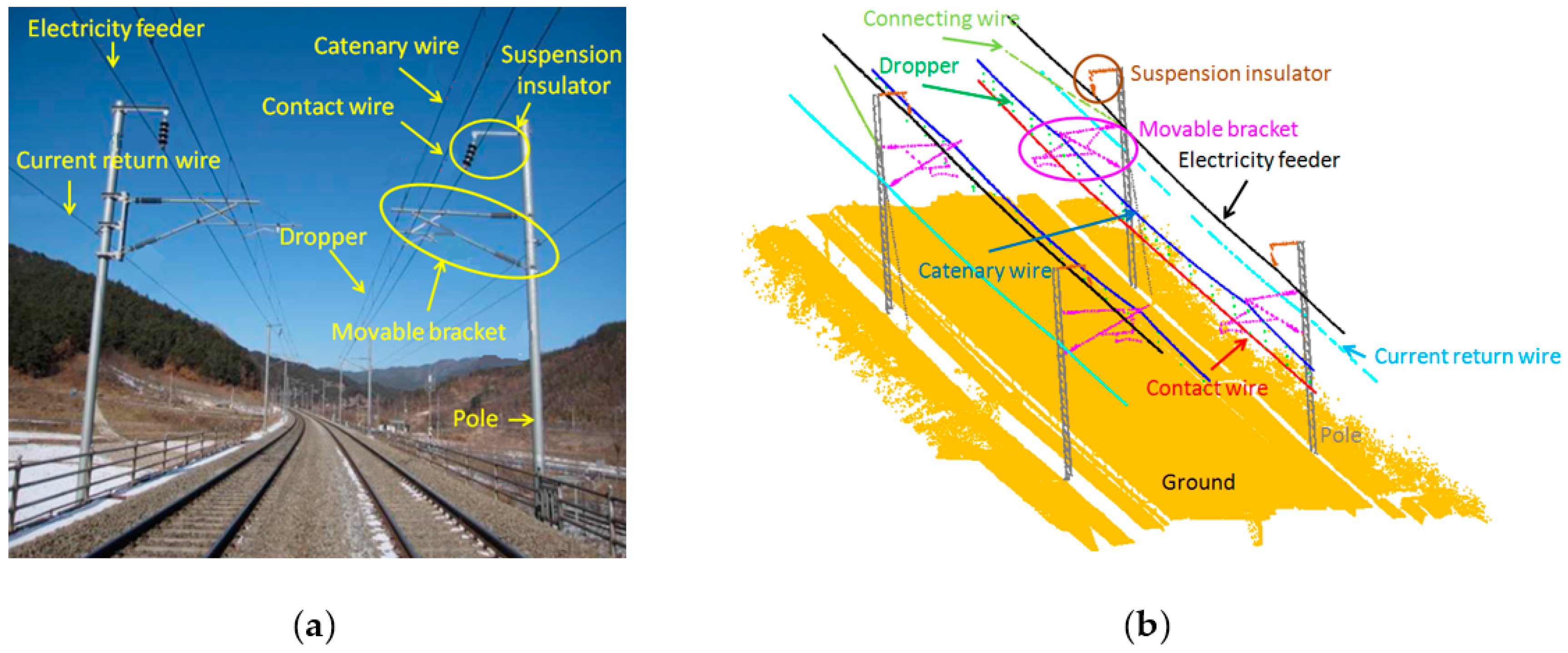
Figure 5.
Electrification system configuration and 10 object classes of the Honam high-speed railway illustrated in: (a) a photograph; and (b) Mobile Laser Scanning (MLS) data.
Figure 5.
Electrification system configuration and 10 object classes of the Honam high-speed railway illustrated in: (a) a photograph; and (b) Mobile Laser Scanning (MLS) data.
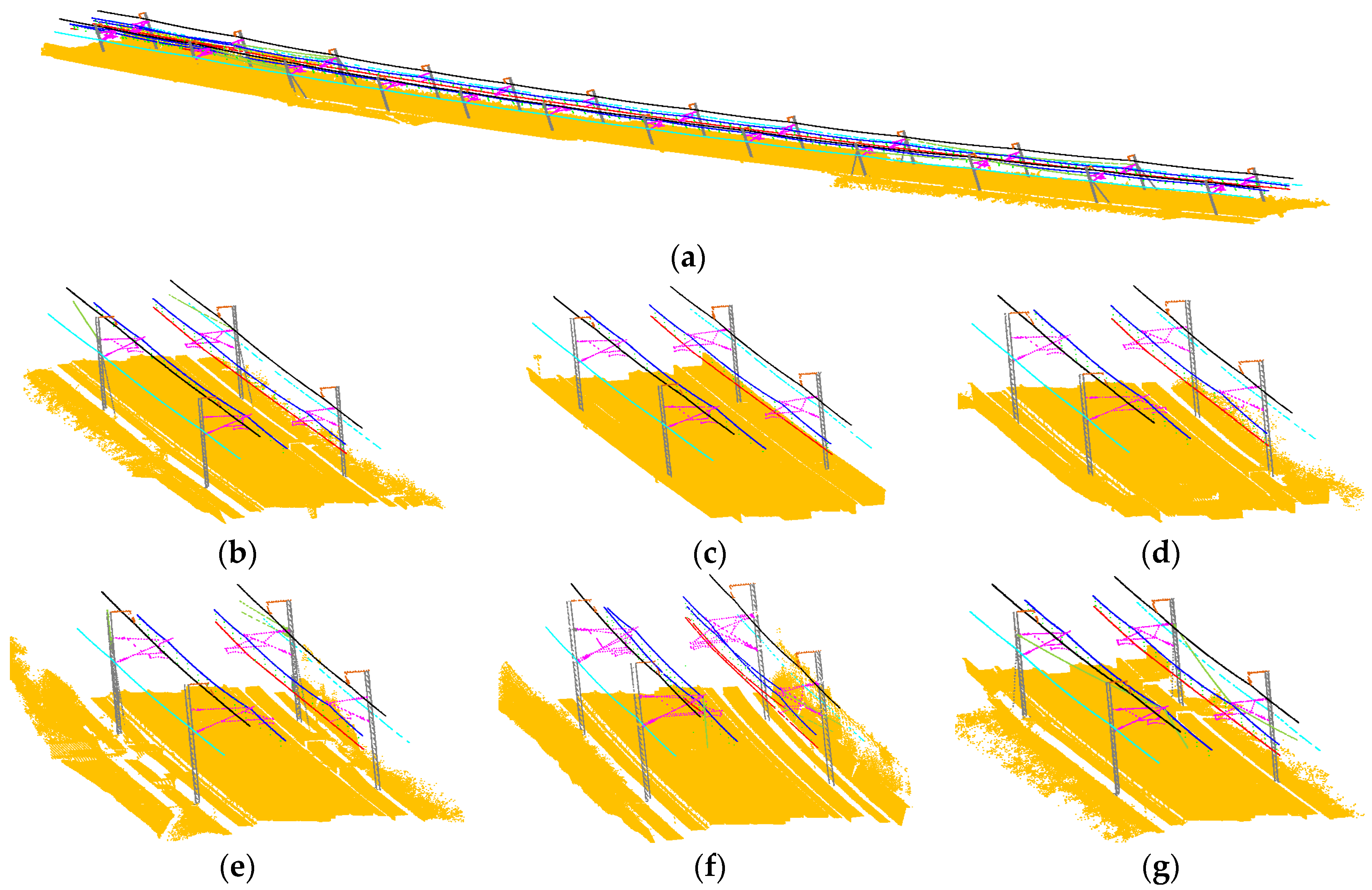
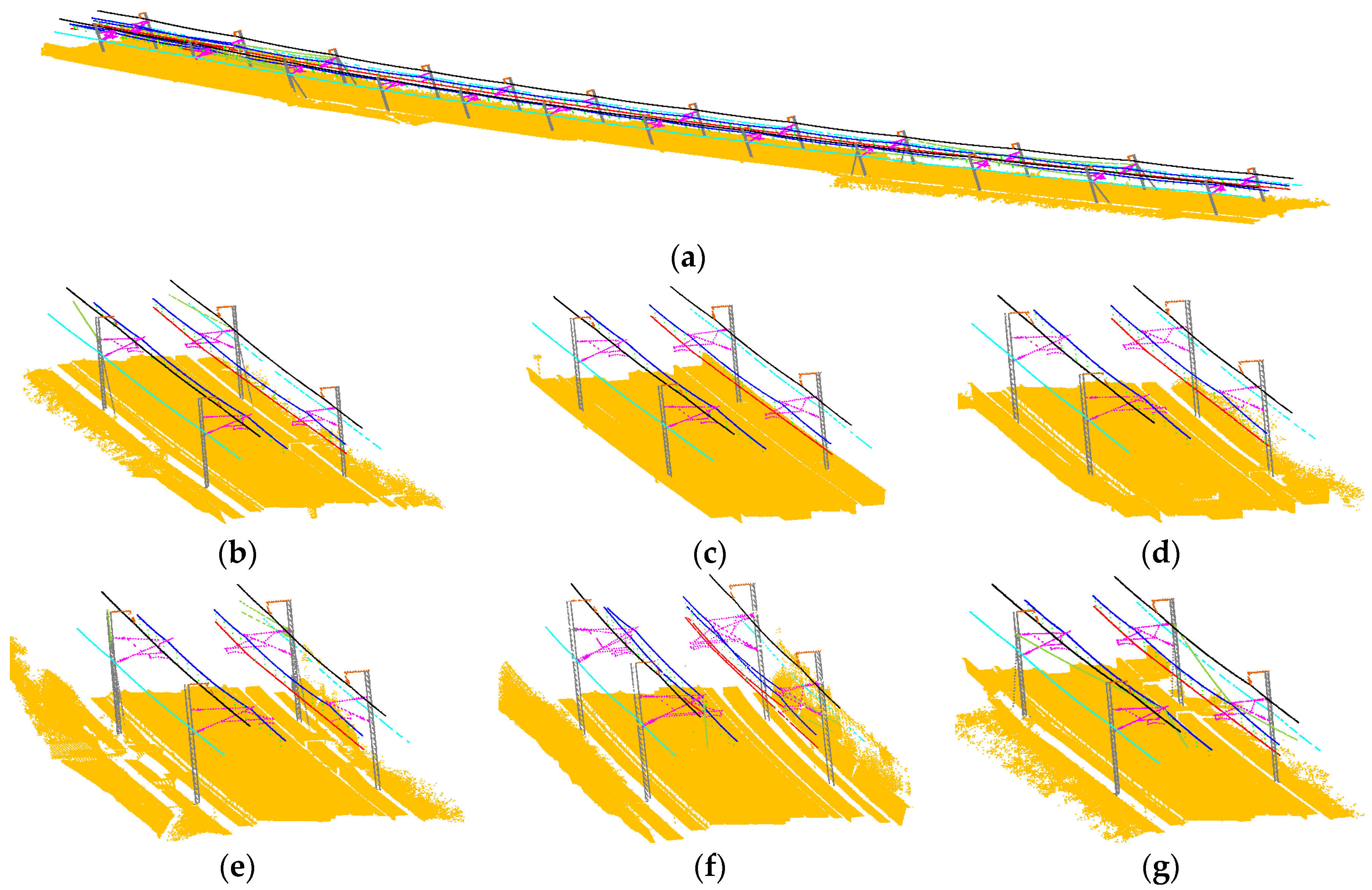
Figure 6.
Manually-classified reference data: (a) entire region; and (b–g) six sub-regions (different colors represent different classes).
Figure 6.
Manually-classified reference data: (a) entire region; and (b–g) six sub-regions (different colors represent different classes).
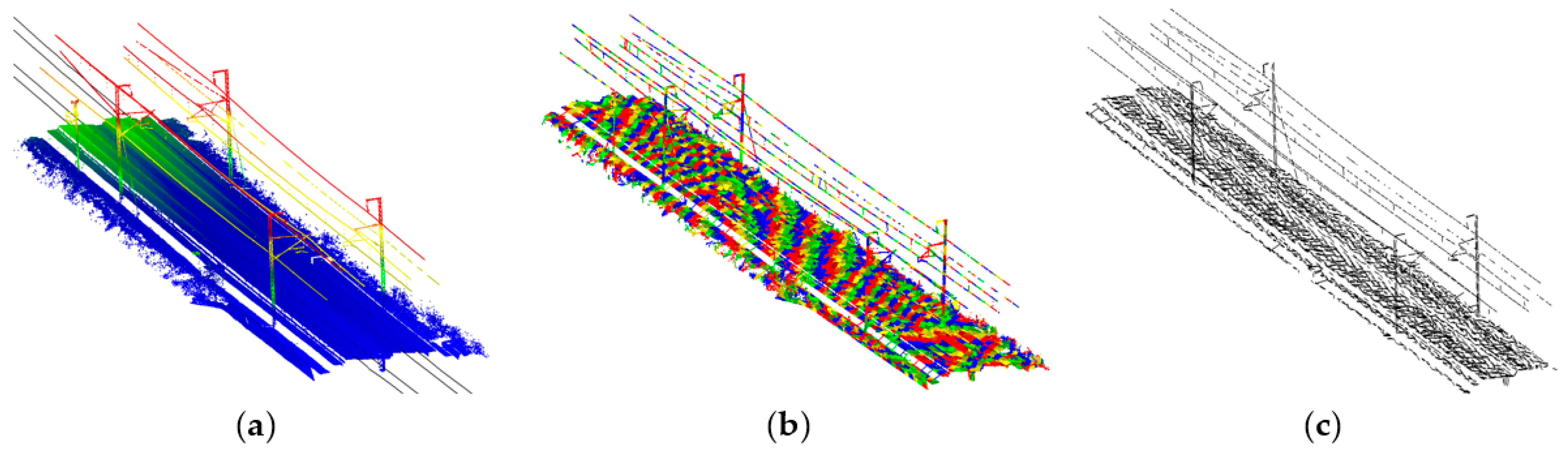
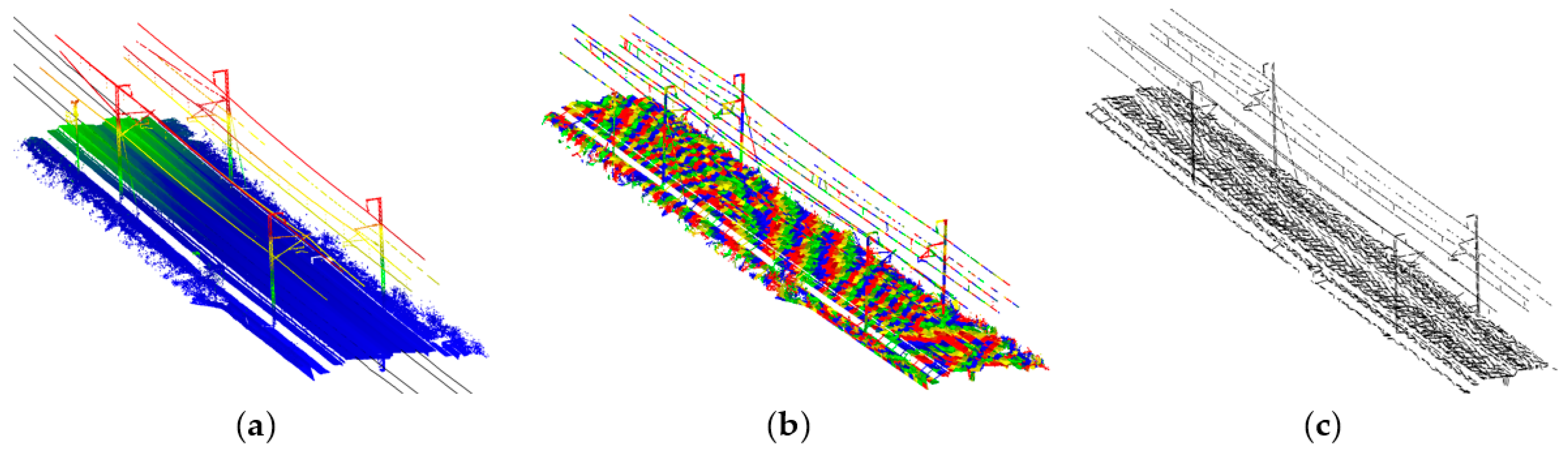
Figure 7.
Example of voxelization and line extraction: (a) input MLS data and rail vectors, (b) voxelization; and (c) extracted lines.
Figure 7.
Example of voxelization and line extraction: (a) input MLS data and rail vectors, (b) voxelization; and (c) extracted lines.
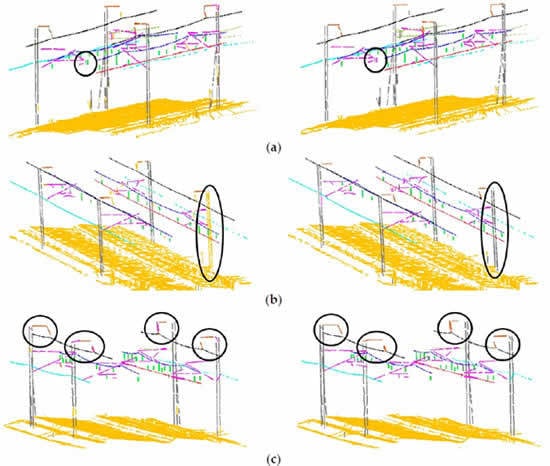
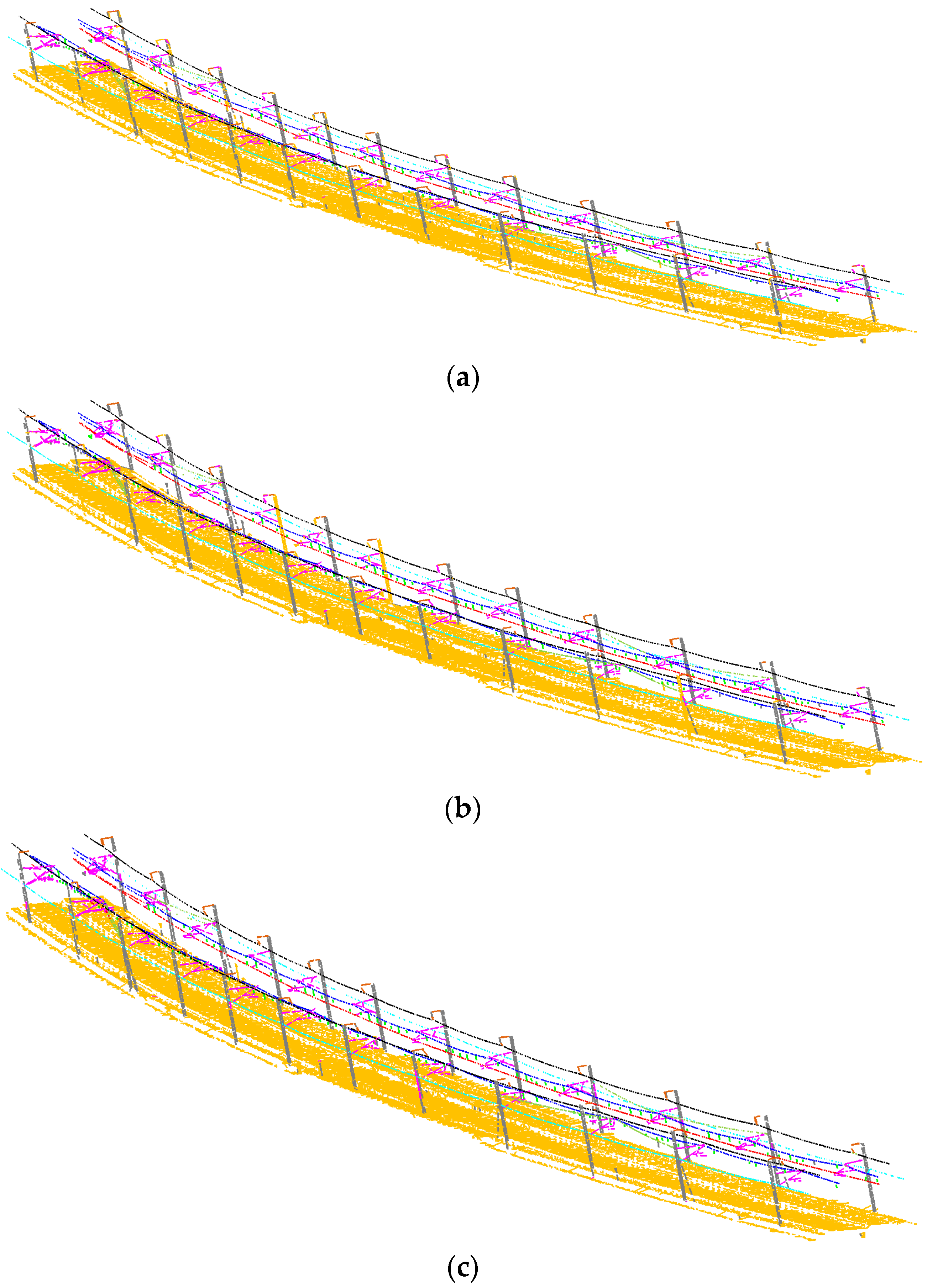
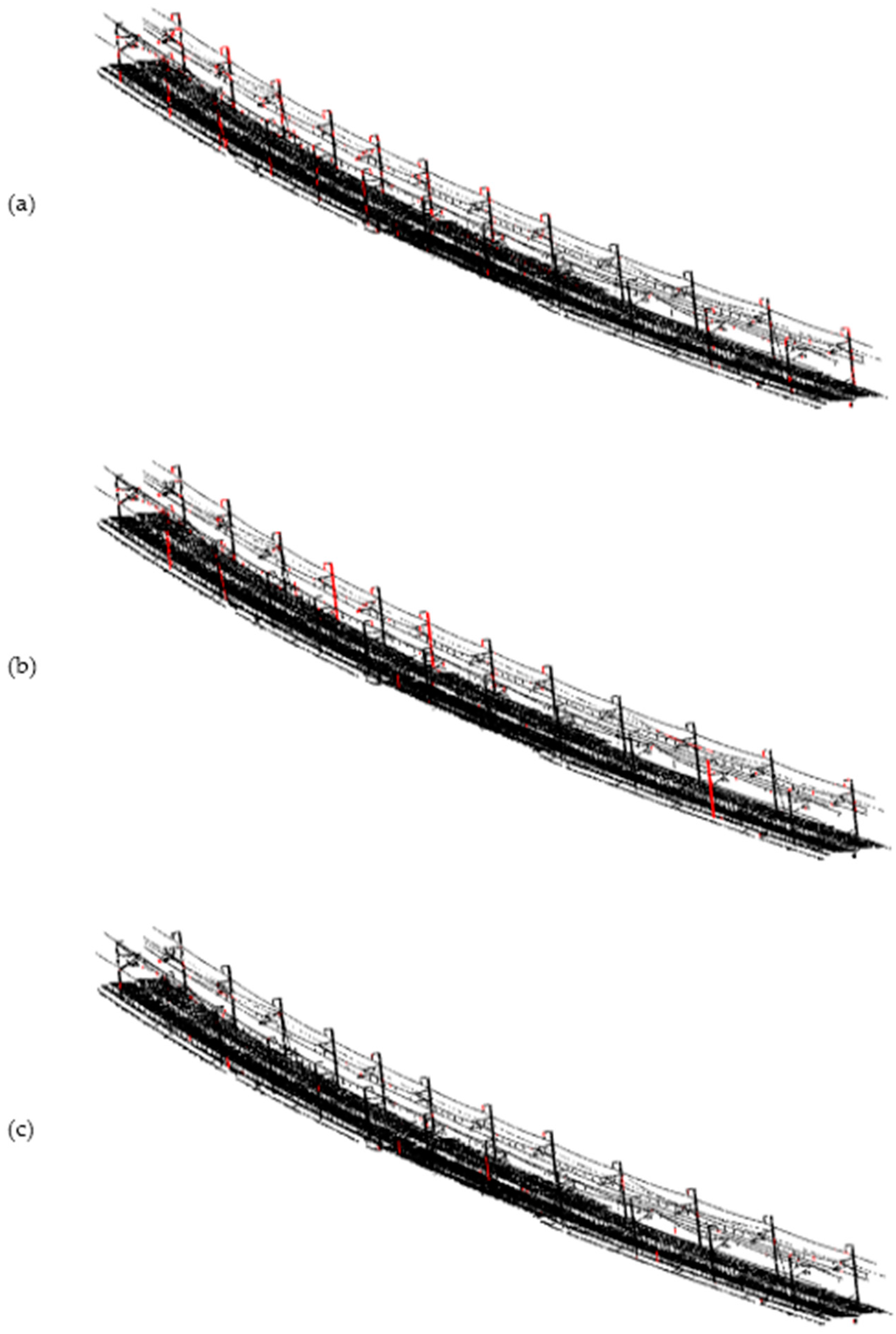
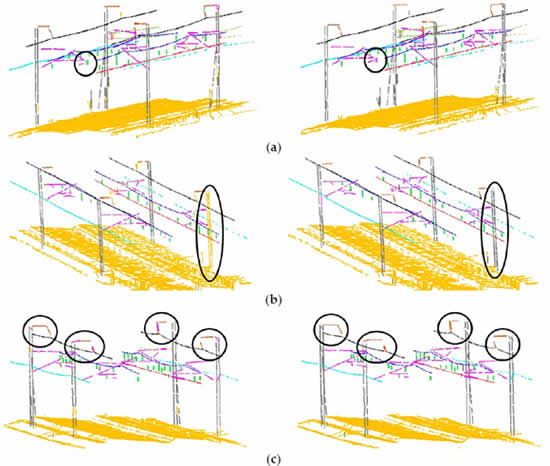
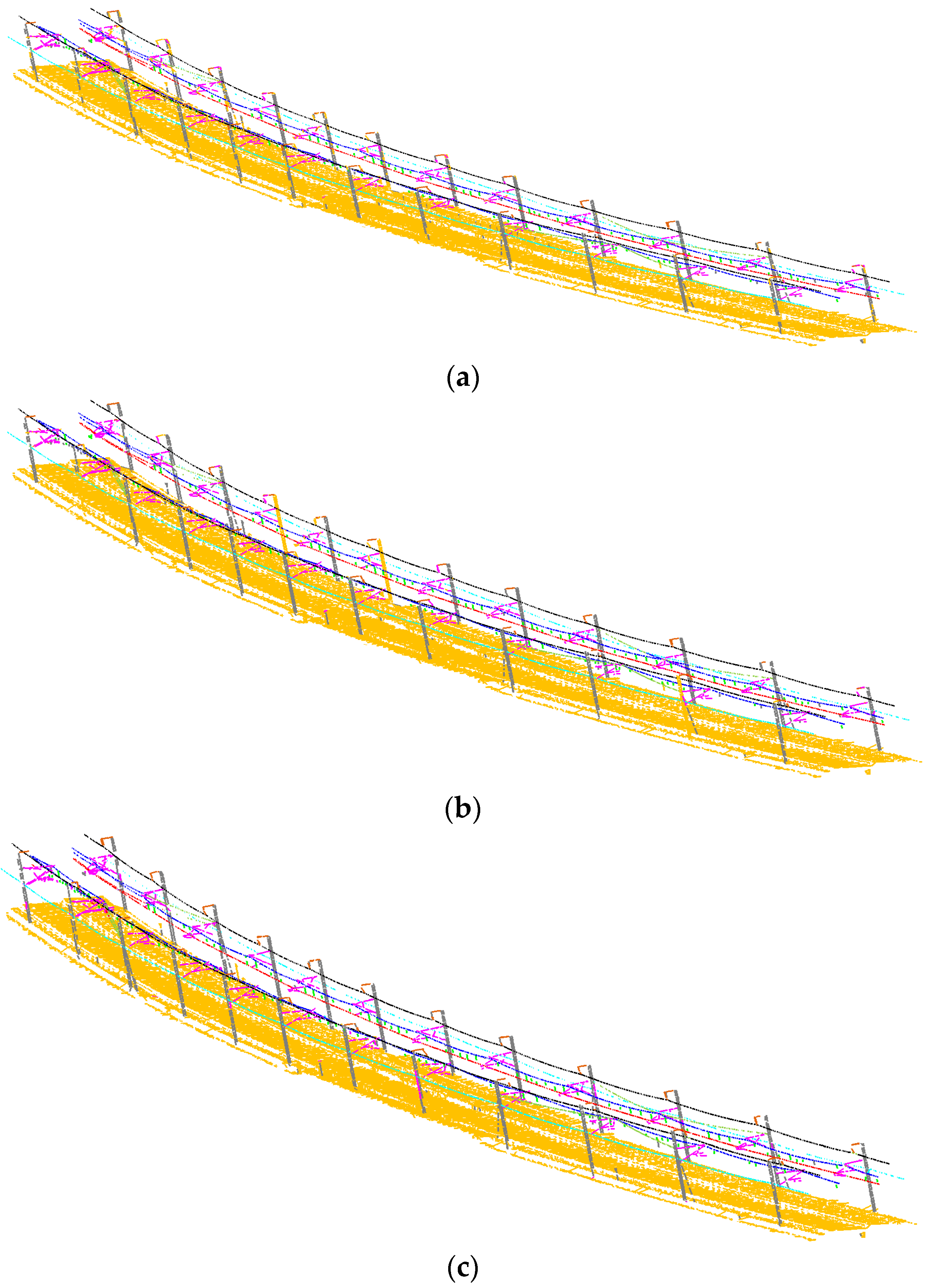
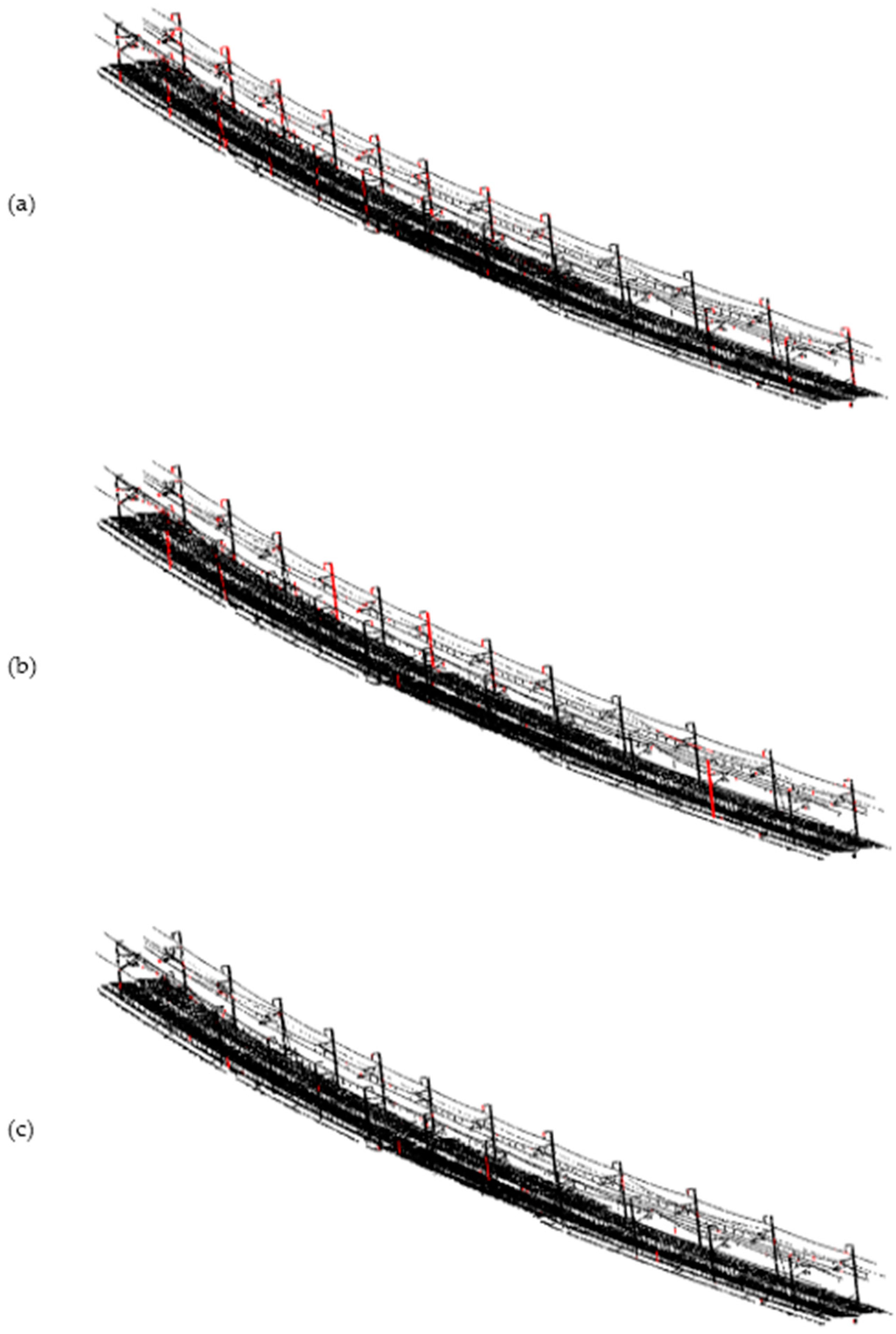
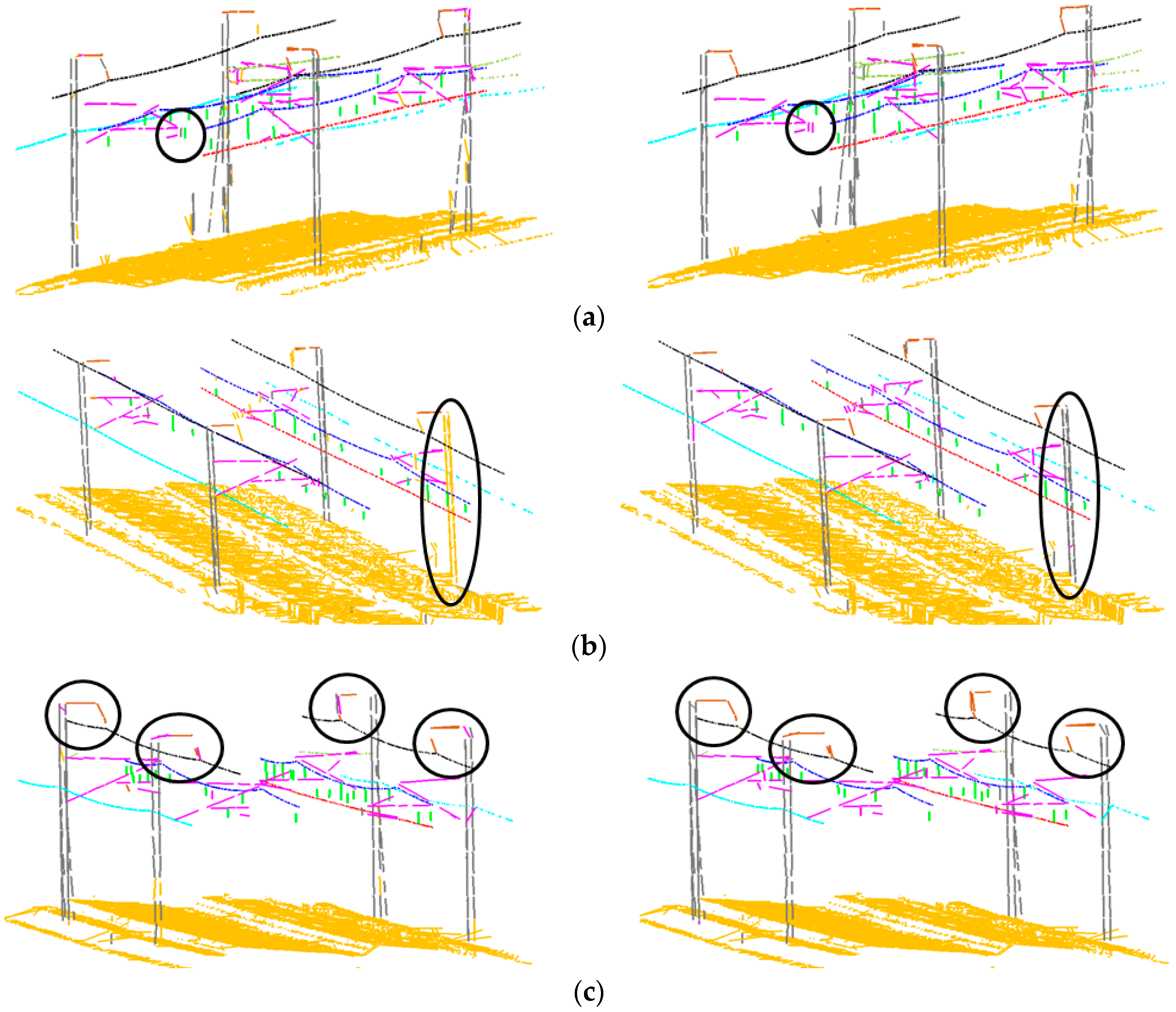
Figure 8.
Classification results produced over the entire railway test scene by: (a) SVM; (b) short-range Conditional Random Field (CRF); and (c) multi-range CRF; electricity feeder (black), catenary wire (blue), contact wire (red), current return wire (sky blue), connecting wire (dark green), suspension insulator (brown), movable bracket (magenta), dropper (green), pole (grey) and ground (orange).
Figure 8.
Classification results produced over the entire railway test scene by: (a) SVM; (b) short-range Conditional Random Field (CRF); and (c) multi-range CRF; electricity feeder (black), catenary wire (blue), contact wire (red), current return wire (sky blue), connecting wire (dark green), suspension insulator (brown), movable bracket (magenta), dropper (green), pole (grey) and ground (orange).
Figure 9.
Classification errors (false positive and false negative) highlighted with red colors produced by: (a) SVM; (b) short-range CRF; and (c) multi-range CRF.
Figure 9.
Classification errors (false positive and false negative) highlighted with red colors produced by: (a) SVM; (b) short-range CRF; and (c) multi-range CRF.
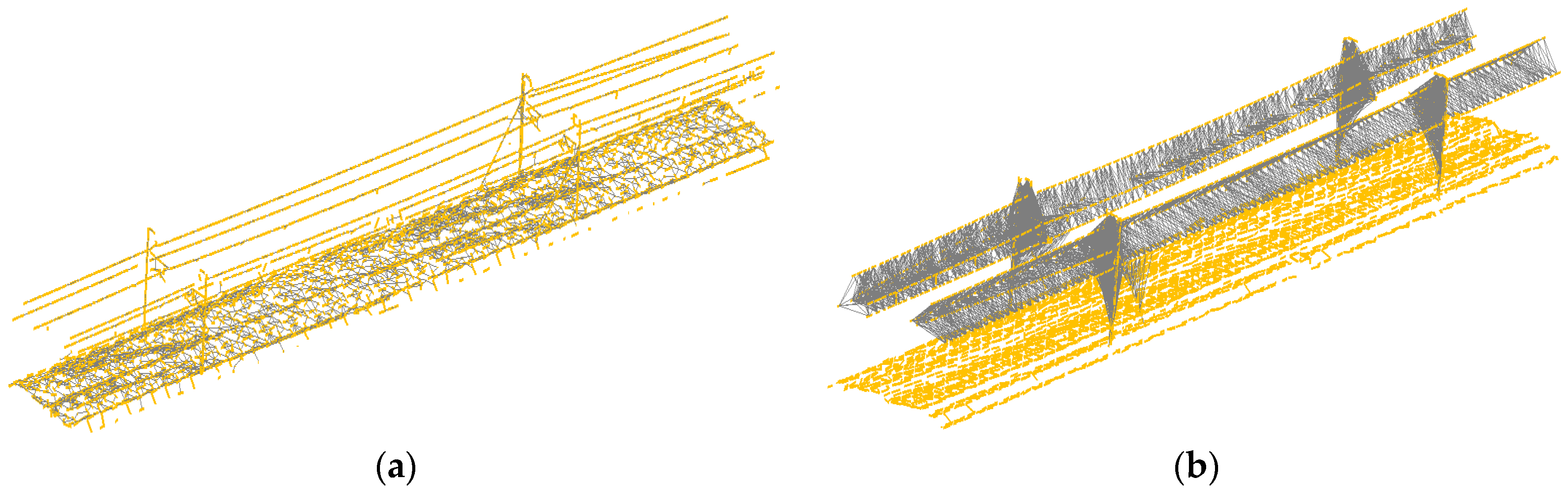
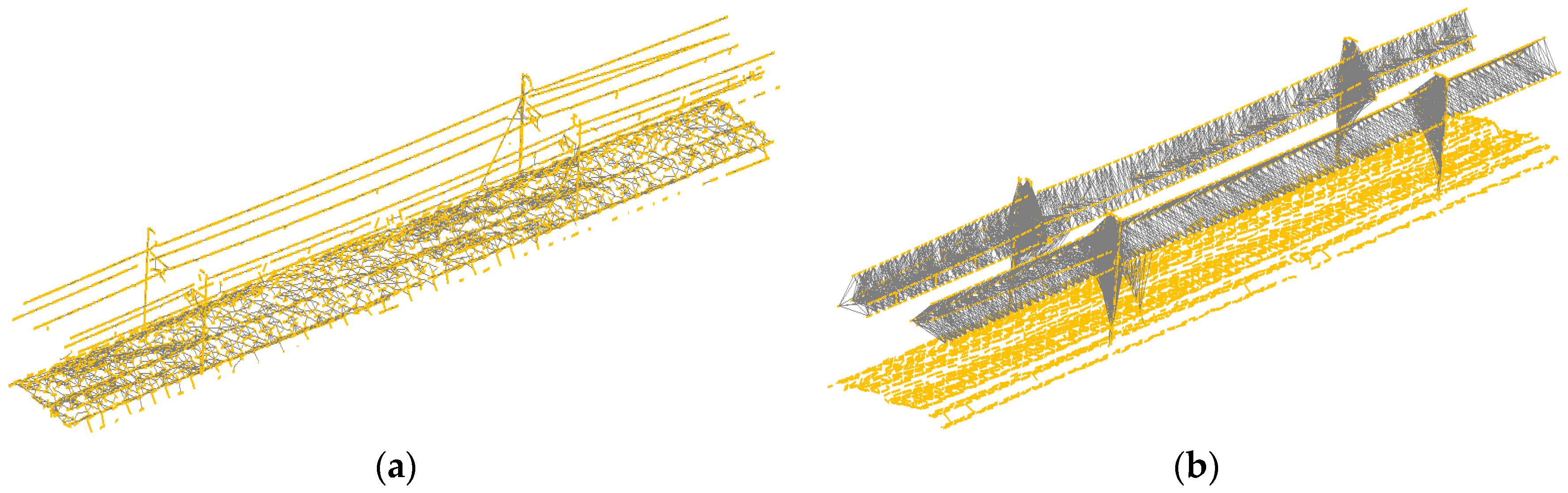
Figure 10.
Examples of the (a) short-range graph; and (b) long-range graph.
Figure 10.
Examples of the (a) short-range graph; and (b) long-range graph.
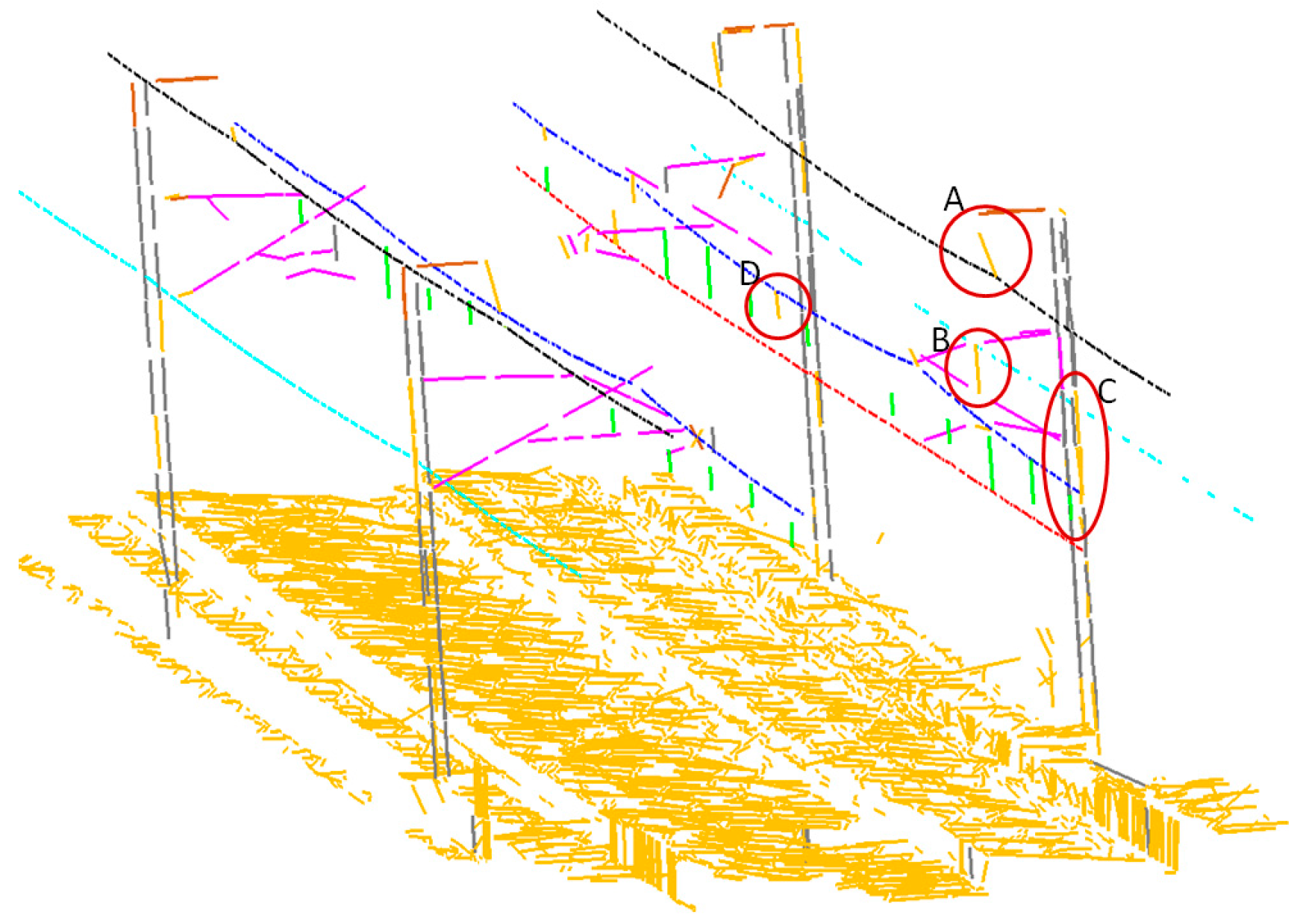
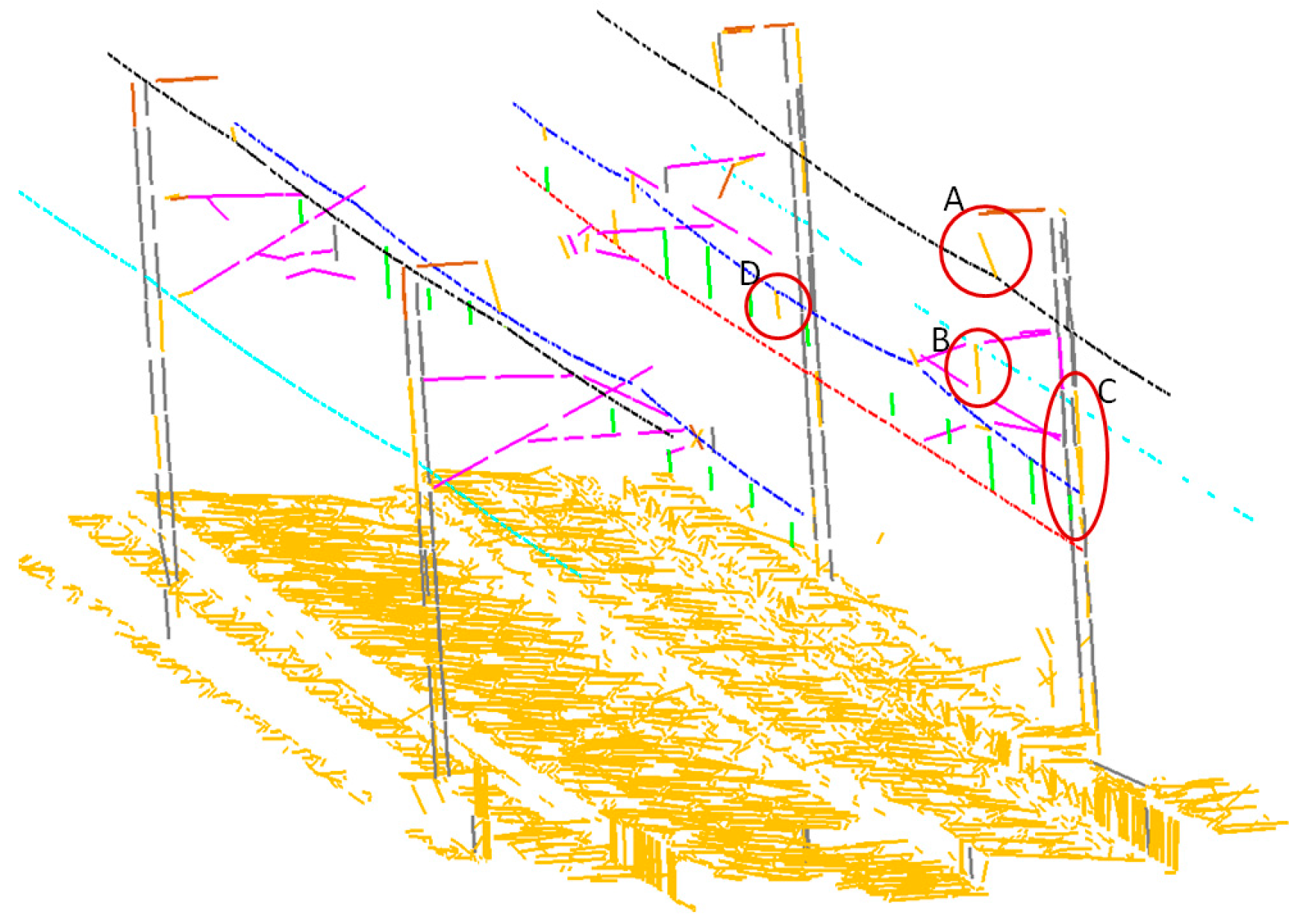
Figure 11.
Examples of errors caused by SVM: (A) the suspension insulator in the reference was classified to ground; (B) the movable bracket in the reference was classified to ground; (C) the pole was classified to ground; and (D) the dropper in the reference was classified to pole.
Figure 11.
Examples of errors caused by SVM: (A) the suspension insulator in the reference was classified to ground; (B) the movable bracket in the reference was classified to ground; (C) the pole was classified to ground; and (D) the dropper in the reference was classified to pole.
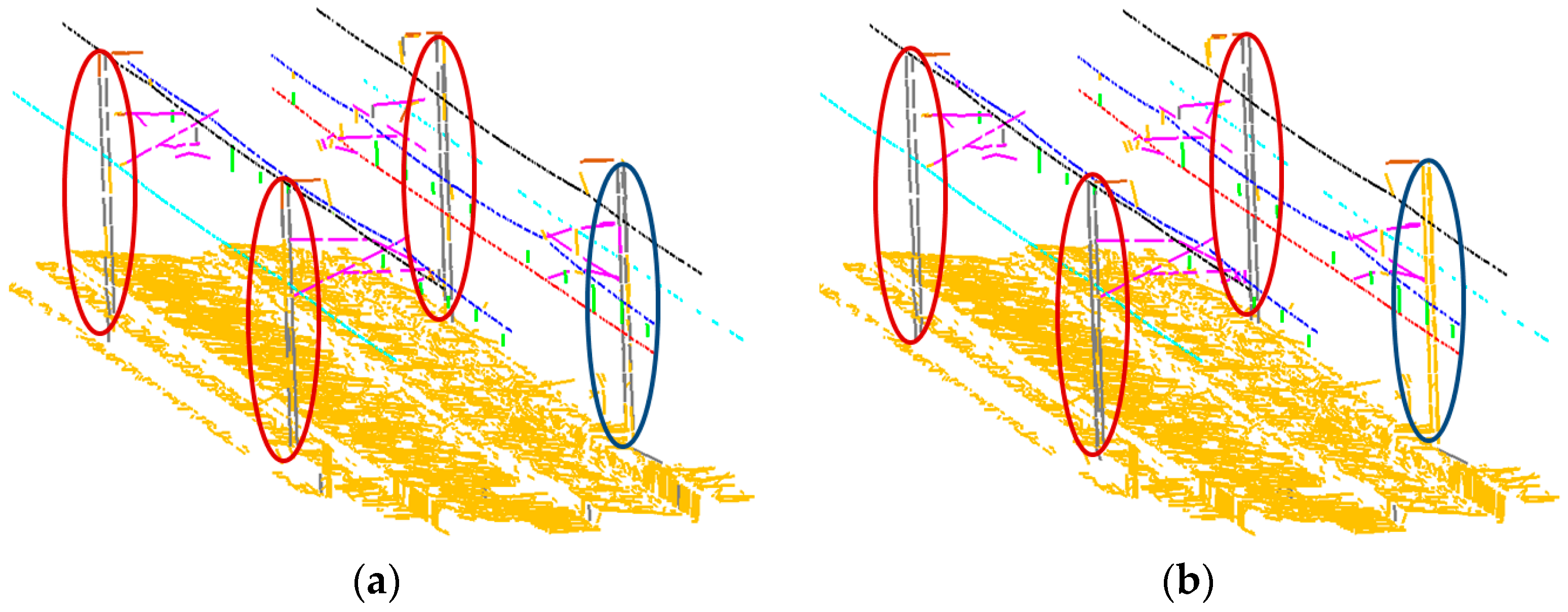
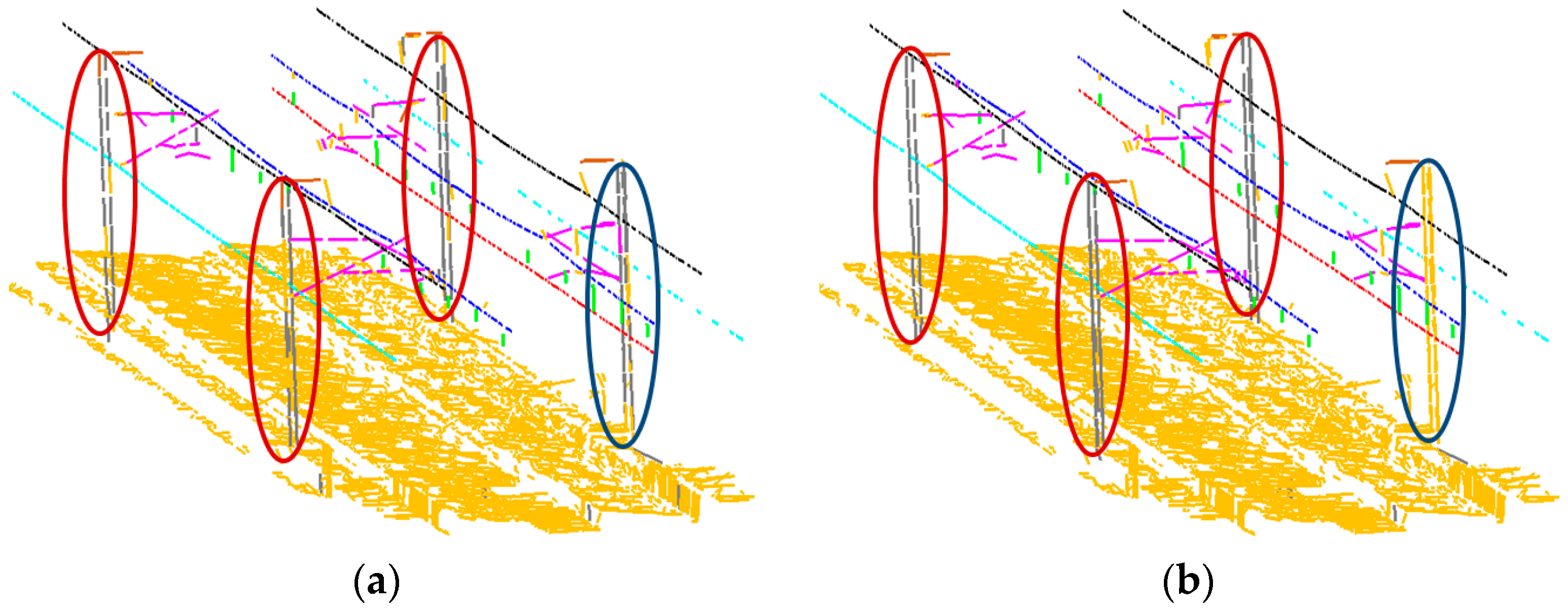
Figure 12.
Effects on short-range CRF: (a) SVM results; and (b) short-range CRF results.
Figure 12.
Effects on short-range CRF: (a) SVM results; and (b) short-range CRF results.
Figure 13.
An example of errors produced over connecting wires (dark green) shown in the top view (sky blue: current return wire; black: electricity feeder; blue: catenary wire; red: contact wire; brown: suspension insulator; magenta: movable bracket; grey: pole).
Figure 13.
An example of errors produced over connecting wires (dark green) shown in the top view (sky blue: current return wire; black: electricity feeder; blue: catenary wire; red: contact wire; brown: suspension insulator; magenta: movable bracket; grey: pole).
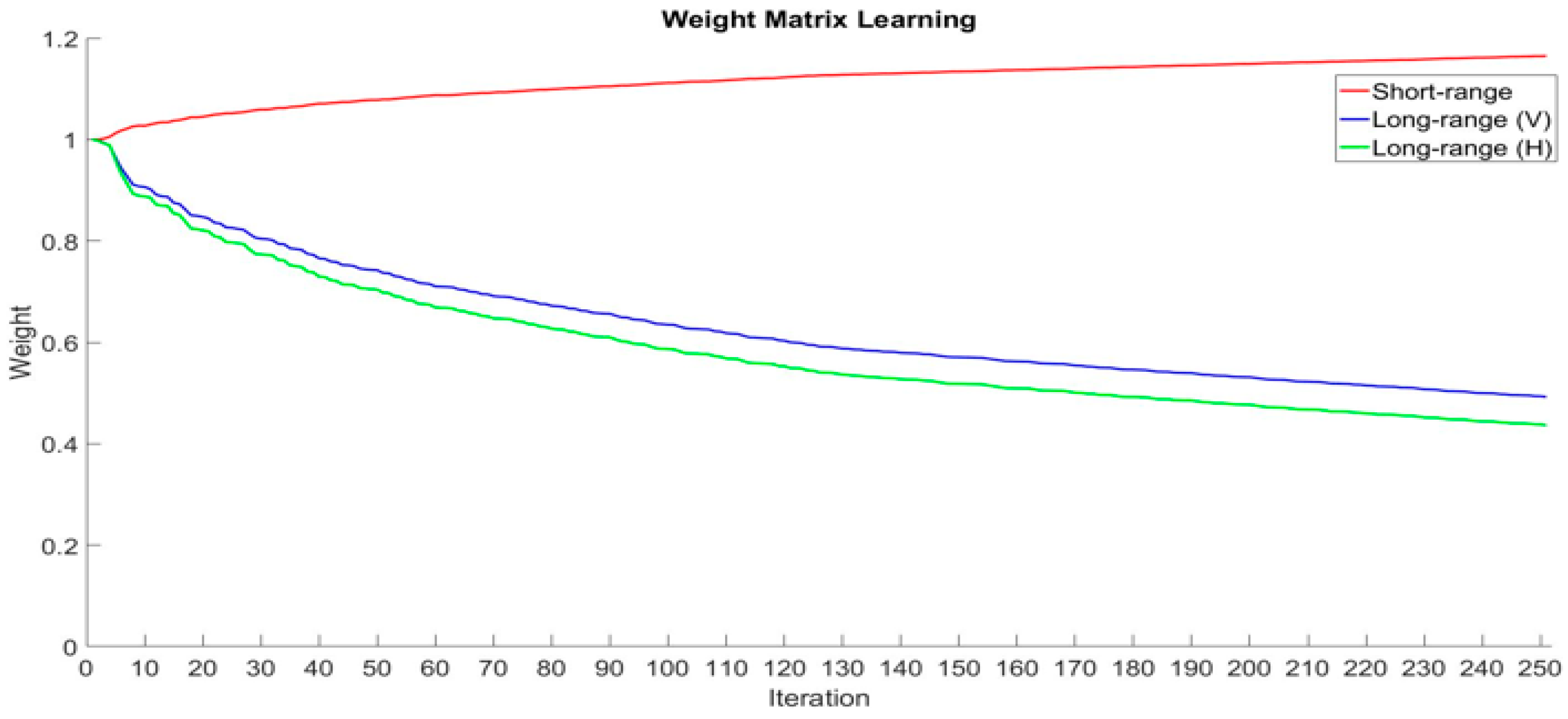
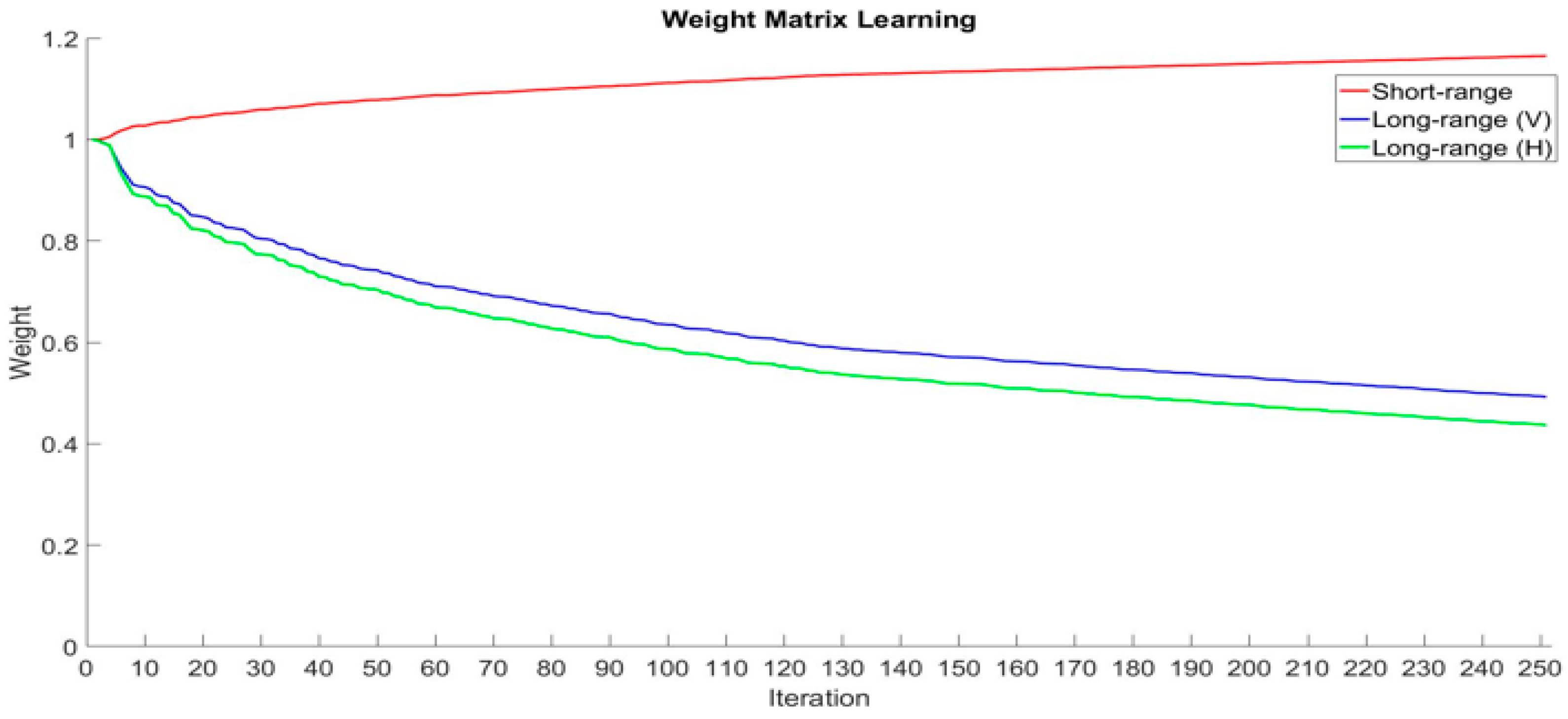
Figure 14.
Weight learning of the multi-range CRF model using the SGD algorithm.
Figure 14.
Weight learning of the multi-range CRF model using the SGD algorithm.
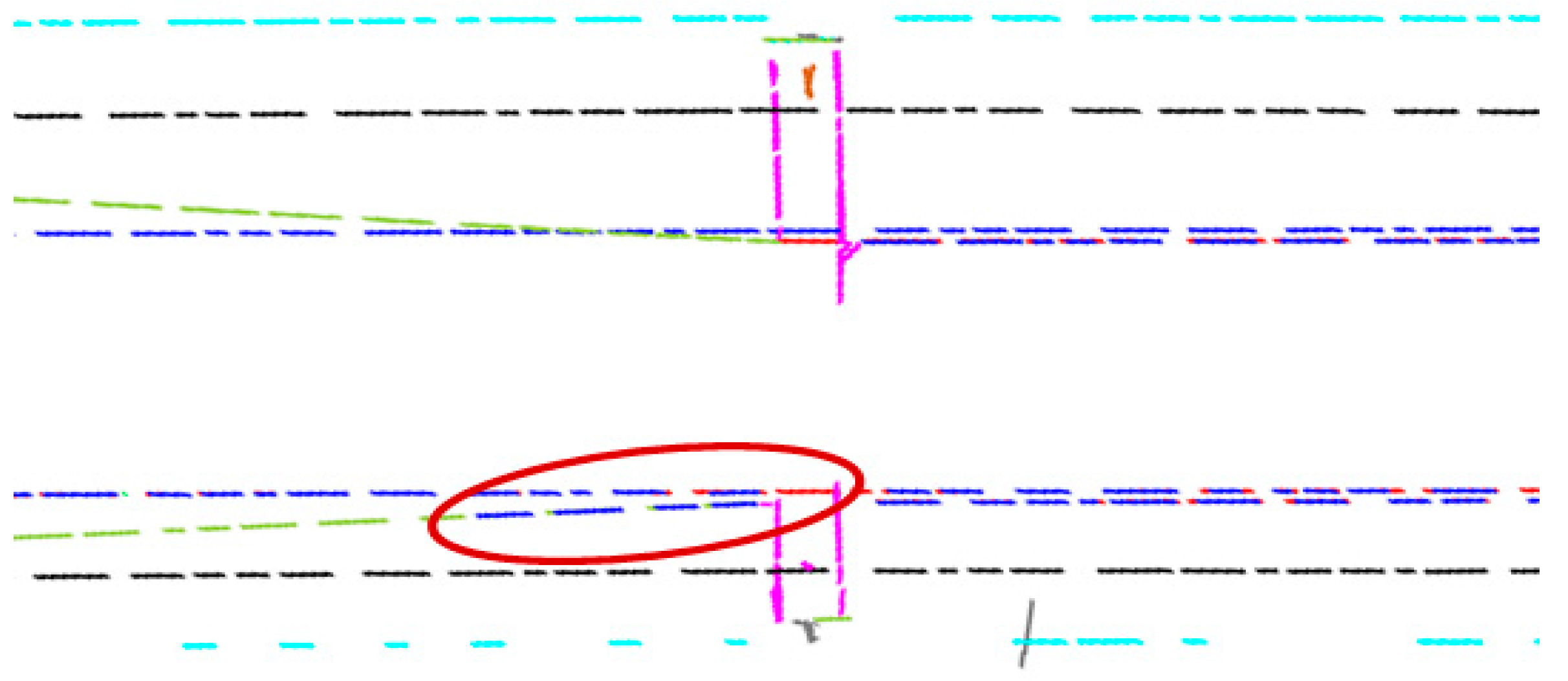
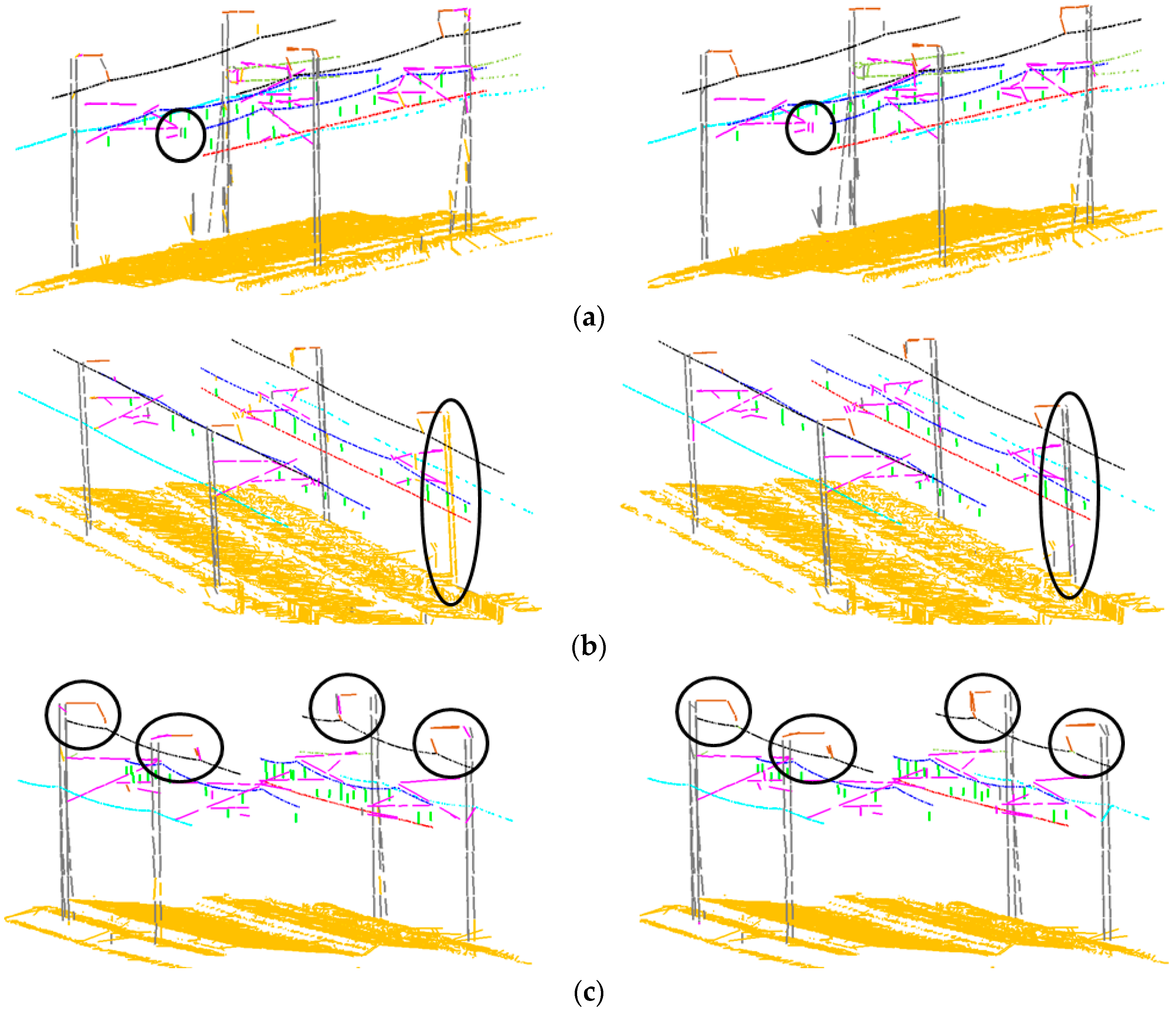
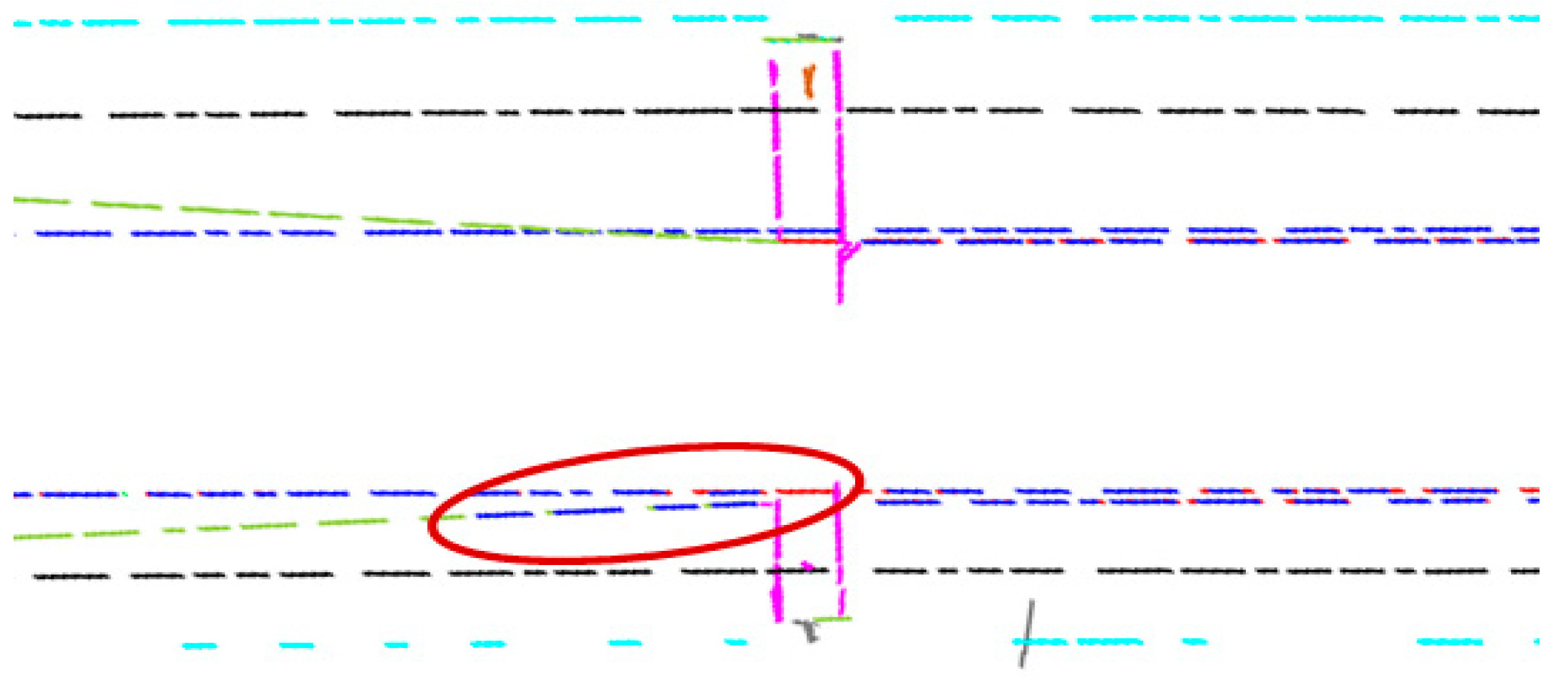
Figure 15.
Visualization of label transitions: (a) the dropper in the SVM results (left) was classified to movable bracket in the integrated CRF model (right); (b) the ground in the short-range CRF (left) was classified to pole in the integrated CRF model (right); (c) the suspension insulators were well rectified in the integrated CRF model (right).
Figure 15.
Visualization of label transitions: (a) the dropper in the SVM results (left) was classified to movable bracket in the integrated CRF model (right); (b) the ground in the short-range CRF (left) was classified to pole in the integrated CRF model (right); (c) the suspension insulators were well rectified in the integrated CRF model (right).
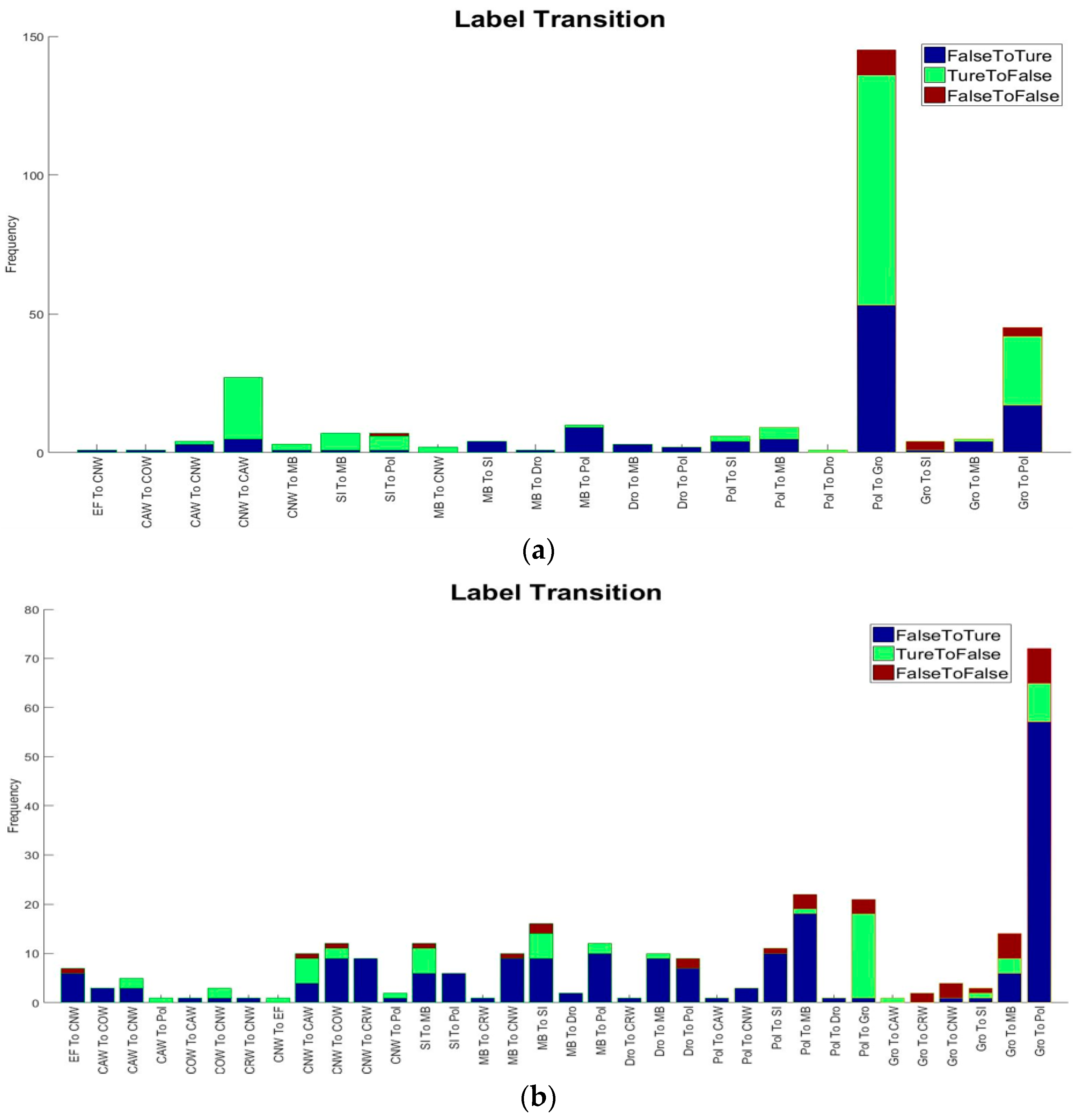
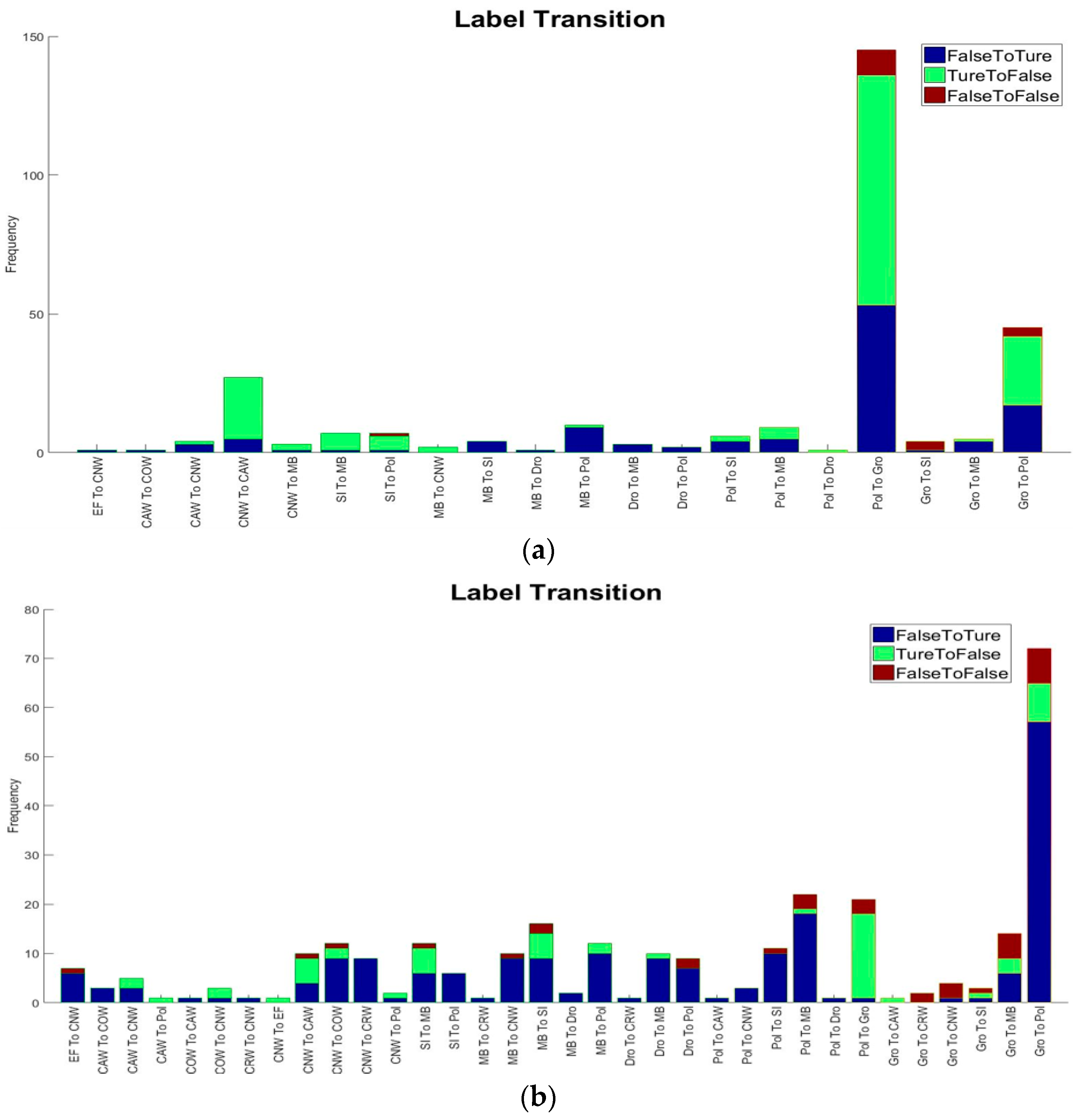
Figure 16.
Label transitions: (a) from SVM to short-range CRF; and (b) from SVM to multi-range CRF: EF (electricity feeder), CAW (catenary wire), COW (contact wire), CRW (current return wire), CNW (connecting wire), SI (suspension insulator), MB (movable bracket), Dro (dropper), Pol (pole) and Gro (ground).
Figure 16.
Label transitions: (a) from SVM to short-range CRF; and (b) from SVM to multi-range CRF: EF (electricity feeder), CAW (catenary wire), COW (contact wire), CRW (current return wire), CNW (connecting wire), SI (suspension insulator), MB (movable bracket), Dro (dropper), Pol (pole) and Gro (ground).
Table 1.
Specifications of the Trimble MX8 system [
31].
Table 1.
Specifications of the Trimble MX8 system [31].
| Parameter | Values |
|---|
| Accuracy | 10 mm |
| Precision | 5 mm |
| Maximum effective measurement rate | 600,000 points/second |
| Line scan speed | Up to 200 lines/second |
| Echo signal intensity | High resolution 16-bit intensity |
| Range | Up to 500 m |
Table 2.
Extracted lines for each sub-region.
Table 2.
Extracted lines for each sub-region.
| Sub-Region | Region 1 | Region 2 | Region 3 | Region 4 | Region 5 | Region 6 |
|---|
| # of extracted lines | 4327 | 4427 | 3783 | 4091 | 4730 | 4762 |
Table 3.
Edge number of different models in different sub-regions.
Table 3.
Edge number of different models in different sub-regions.
| Edge Number | Region 1 | Region 2 | Region 3 | Region 4 | Region 5 | Region 6 |
|---|
| # of short-range edges | 6967 | 7844 | 6671 | 7657 | 9460 | 8469 |
| # of long-range edges | 7000 | 7557 | 6764 | 7728 | 11,331 | 8005 |
Table 4.
Confusion matrix for SVM results: electricity feeder (EF), catenary wire (CAW), contact wire (COW), current return wire (CRW), connecting wire (CNW), suspension insulator (SI), movable bracket (MB), dropper (Dro), pole (Pole) and ground (Gro).
Table 4.
Confusion matrix for SVM results: electricity feeder (EF), catenary wire (CAW), contact wire (COW), current return wire (CRW), connecting wire (CNW), suspension insulator (SI), movable bracket (MB), dropper (Dro), pole (Pole) and ground (Gro).
| | Classified | Recall (%) |
|---|
| EF | CAW | COW | CRW | CNW | SI | MB | Dro | Pole | Gro |
|---|
| Reference | EF | 1249 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 99.84 |
| CAW | 0 | 1365 | 0 | 0 | 4 | 0 | 2 | 0 | 0 | 0 | 99.56 |
| COW | 0 | 1 | 687 | 0 | 2 | 0 | 1 | 0 | 0 | 1 | 99.28 |
| CRW | 0 | 0 | 0 | 970 | 0 | 0 | 1 | 0 | 0 | 0 | 99.90 |
| CNW | 0 | 8 | 0 | 0 | 372 | 0 | 12 | 0 | 6 | 6 | 92.08 |
| SI | 0 | 0 | 0 | 0 | 0 | 73 | 15 | 0 | 16 | 5 | 66.97 |
| MB | 1 | 1 | 0 | 6 | 7 | 12 | 375 | 12 | 8 | 11 | 86.61 |
| Dro | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 134 | 5 | 1 | 93.06 |
| Pole | 0 | 0 | 0 | 0 | 2 | 6 | 9 | 1 | 678 | 69 | 88.63 |
| Gro | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 46 | 19,932 | 99.76 |
| Precision (%) | 99.92 | 99.27 | 100 | 99.38 | 95.63 | 80.22 | 89.07 | 91.16 | 89.33 | 99.54 | 98.91 |
Table 5.
Confusion matrix for short-range CRF: electricity feeder (EF), catenary wire (CAW), contact wire (COW), current return wire (CRW), connecting wire (CNW), suspension insulator (SI), movable bracket (MB), dropper (Dro), pole (Pole) and ground (Gro).
Table 5.
Confusion matrix for short-range CRF: electricity feeder (EF), catenary wire (CAW), contact wire (COW), current return wire (CRW), connecting wire (CNW), suspension insulator (SI), movable bracket (MB), dropper (Dro), pole (Pole) and ground (Gro).
| | Classified | Recall (%) |
|---|
| EF | CAW | COW | CRW | CNW | SI | MB | Dro | Pole | Gro |
|---|
| Reference | EF | 1249 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 99.84 |
| CAW | 0 | 1365 | 0 | 0 | 4 | 0 | 2 | 0 | 0 | 0 | 99.56 |
| COW | 0 | 0 | 688 | 0 | 2 | 0 | 1 | 0 | 0 | 1 | 99.42 |
| CRW | 0 | 0 | 0 | 970 | 0 | 0 | 1 | 0 | 0 | 0 | 99.90 |
| CNW | 0 | 30 | 0 | 0 | 349 | 0 | 17 | 0 | 4 | 4 | 86.39 |
| SI | 0 | 0 | 0 | 0 | 0 | 83 | 14 | 0 | 11 | 1 | 76.15 |
| MB | 0 | 2 | 0 | 6 | 7 | 8 | 384 | 8 | 13 | 5 | 88.68 |
| Dro | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 136 | 5 | 0 | 94.44 |
| Pole | 0 | 0 | 0 | 0 | 2 | 0 | 6 | 0 | 612 | 145 | 80.00 |
| Gro | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 17 | 19,960 | 99.90 |
| Precision (%) | 100 | 97.71 | 100 | 99.39 | 95.36 | 91.21 | 89.10 | 94.44 | 92.45 | 99.22 | 98.76 |
Table 6.
Confusion matrix for integrated CRF: electricity feeder (EF), catenary wire (CAW), contact wire (COW), current return wire (CRW), connecting wire (CNW), suspension insulator (SI), movable bracket (MB), dropper (Dro), pole (Pole) and ground (Gro).
Table 6.
Confusion matrix for integrated CRF: electricity feeder (EF), catenary wire (CAW), contact wire (COW), current return wire (CRW), connecting wire (CNW), suspension insulator (SI), movable bracket (MB), dropper (Dro), pole (Pole) and ground (Gro).
| | Classified | Recall (%) |
|---|
| EF | CAW | COW | CRW | CNW | SI | MB | Dro | Pole | Gro |
|---|
| Reference | EF | 1244 | 0 | 0 | 0 | 7 | 0 | 0 | 0 | 0 | 0 | 99.44 |
| CAW | 0 | 1366 | 0 | 0 | 2 | 0 | 1 | 0 | 2 | 0 | 99.64 |
| COW | 0 | 2 | 684 | 0 | 3 | 0 | 1 | 0 | 2 | 0 | 98.84 |
| CRW | 0 | 0 | 0 | 970 | 1 | 0 | 0 | 0 | 0 | 0 | 99.90 |
| CNW | 0 | 8 | 14 | 7 | 370 | 0 | 1 | 0 | 4 | 0 | 91.58 |
| SI | 0 | 0 | 0 | 0 | 0 | 102 | 0 | 0 | 7 | 0 | 93.58 |
| MB | 0 | 3 | 0 | 11 | 4 | 0 | 411 | 0 | 4 | 0 | 94.92 |
| Dro | 0 | 0 | 0 | 0 | 0 | 0 | 6 | 130 | 8 | 0 | 90.28 |
| Pole | 0 | 0 | 0 | 0 | 1 | 1 | 16 | 0 | 747 | 0 | 97.65 |
| Gro | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 28 | 19,950 | 99.85 |
| Precision (%) | 100 | 99.06 | 97.99 | 98.18 | 95.36 | 99.03 | 93.84 | 100 | 93.14 | 100 | 99.44 |
Table 7.
A summary of the classification performance achieved by three classifiers (unit: %).
Table 7.
A summary of the classification performance achieved by three classifiers (unit: %).
| Class | (a) SVM | (b) Short-Range CRF | (c) Multi-Range CRF |
|---|
| Recall | Precision | F1 | Recall | Precision | F1 | Recall | Precision | F1 |
|---|
| EF | 99.84 | 99.92 | 99.88 | 99.84 | 100 | 99.92 | 99.44 | 100 | 99.72 |
| CAW | 99.56 | 99.27 | 99.41 | 99.56 | 97.71 | 98.63 | 99.64 | 99.06 | 99.35 |
| COW | 99.28 | 100 | 99.63 | 99.42 | 100 | 99.71 | 98.84 | 97.99 | 98.42 |
| CRW | 99.90 | 99.38 | 99.64 | 99.90 | 99.39 | 99.64 | 99.90 | 98.18 | 99.03 |
| CNW | 92.08 | 95.63 | 93.82 | 86.39 | 95.36 | 90.65 | 91.58 | 95.36 | 93.43 |
| SI | 66.97 | 80.22 | 73.00 | 76.15 | 91.21 | 83.00 | 93.58 | 99.03 | 96.23 |
| MB | 86.61 | 89.07 | 87.82 | 88.68 | 89.10 | 88.89 | 94.92 | 93.84 | 94.37 |
| Dro | 93.06 | 91.16 | 92.09 | 94.44 | 94.44 | 94.44 | 90.28 | 100 | 94.89 |
| Pole | 88.63 | 89.33 | 88.97 | 80.00 | 92.45 | 85.77 | 97.65 | 93.14 | 95.34 |
| Gro | 99.76 | 99.54 | 99.64 | 99.90 | 99.22 | 99.56 | 99.85 | 100 | 99.92 |
| Average | 92.57 | 94.35 | 93.39 | 92.43 | 95.89 | 94.02 | 96.57 | 97.66 | 97.07 |
Table 8.
The comparison of three different classifiers (unit: %): (a) short-range CRF—SVM; (b) multi-range CRF—SVM; and (c) multi-range CRF—short-range CRF.
Table 8.
The comparison of three different classifiers (unit: %): (a) short-range CRF—SVM; (b) multi-range CRF—SVM; and (c) multi-range CRF—short-range CRF.
| Class | (a) Short-Range—SVM | (b) Multi-Range—SVM | (c) Multi-Range—Short-Range |
|---|
| Recall | Precision | F1 | Recall | Precision | F1 | Recall | Precision | F1 |
|---|
| EF | 0 | +0.08 | +0.04 | −0.40 | +0.08 | −0.16 | −0.4 | 0 | −0.2 |
| CAW | 0 | −1.56 | −0.78 | +0.08 | −0.21 | −0.06 | +0.08 | +1.35 | +0.72 |
| COW | +0.14 | 0 | +0.08 | −0.44 | −2.01 | −1.21 | −0.58 | −2.01 | −1.29 |
| CRW | 0 | +0.01 | 0 | 0 | −1.20 | −0.61 | 0 | −1.21 | −0.61 |
| CNW | −5.69 | −0.27 | −3.17 | −0.50 | −0.27 | −0.39 | +5.19 | 0 | +2.78 |
| SI | +9.18 | +10.99 | +10.00 | +26.61 | +18.81 | +23.32 | +17.43 | +7.82 | +13.23 |
| MB | +2.07 | +0.03 | +1.07 | +8.31 | +4.77 | +6.55 | +6.24 | +4.74 | +5.48 |
| Dro | +1.38 | +3.28 | +2.35 | −2.78 | +8.84 | +2.80 | −4.16 | +5.56 | +0.45 |
| Pole | −8.63 | +3.12 | −3.20 | +9.02 | +3.81 | +6.37 | +17.65 | +0.69 | +9.57 |
| Gro | +0.14 | −0.32 | −0.08 | +0.09 | +0.46 | +0.28 | −0.05 | +0.78 | +0.36 |
| Average | −0.14 | +1.54 | +1.54 | +4.00 | +3.31 | +3.68 | +4.14 | +1.77 | +3.05 |
Table 9.
Comparison of accuracy and precision between [
2] and the proposed multi-range CRF.
Table 9.
Comparison of accuracy and precision between [2] and the proposed multi-range CRF.
| Class | (a) Results from [2] | (b) Multi-Range CRF | (b)–(a) |
|---|
| Accuracy | Precision | Accuracy | Precision | Accuracy | Precision |
|---|
| Catenary wire | 96.92 | 95.87 | 99.93 | 99.06 | +3.01 | 3.19 |
| Contact wire | 97.66 | 96.02 | 99.92 | 97.99 | +2.26 | 1.97 |
| Current return wire | 94.72 | 99.63 | 99.93 | 98.18 | +5.21 | −1.45 |
| Movable bracket | 91.23 | 97.43 | 99.81 | 93.84 | +8.58 | −3.59 |
| Pole | 99.42 | 95.17 | 99.72 | 93.14 | +0.30 | −2.03 |
| Average | 95.99 | 96.82 | 99.86 | 96.44 | +3.87 | −0.38 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}