UAS-SfM for Coastal Research: Geomorphic Feature Extraction and Land Cover Classification from High-Resolution Elevation and Optical Imagery

 , , , ,
, , , ,
Abstract
:
1. Introduction
2. Materials and Methods
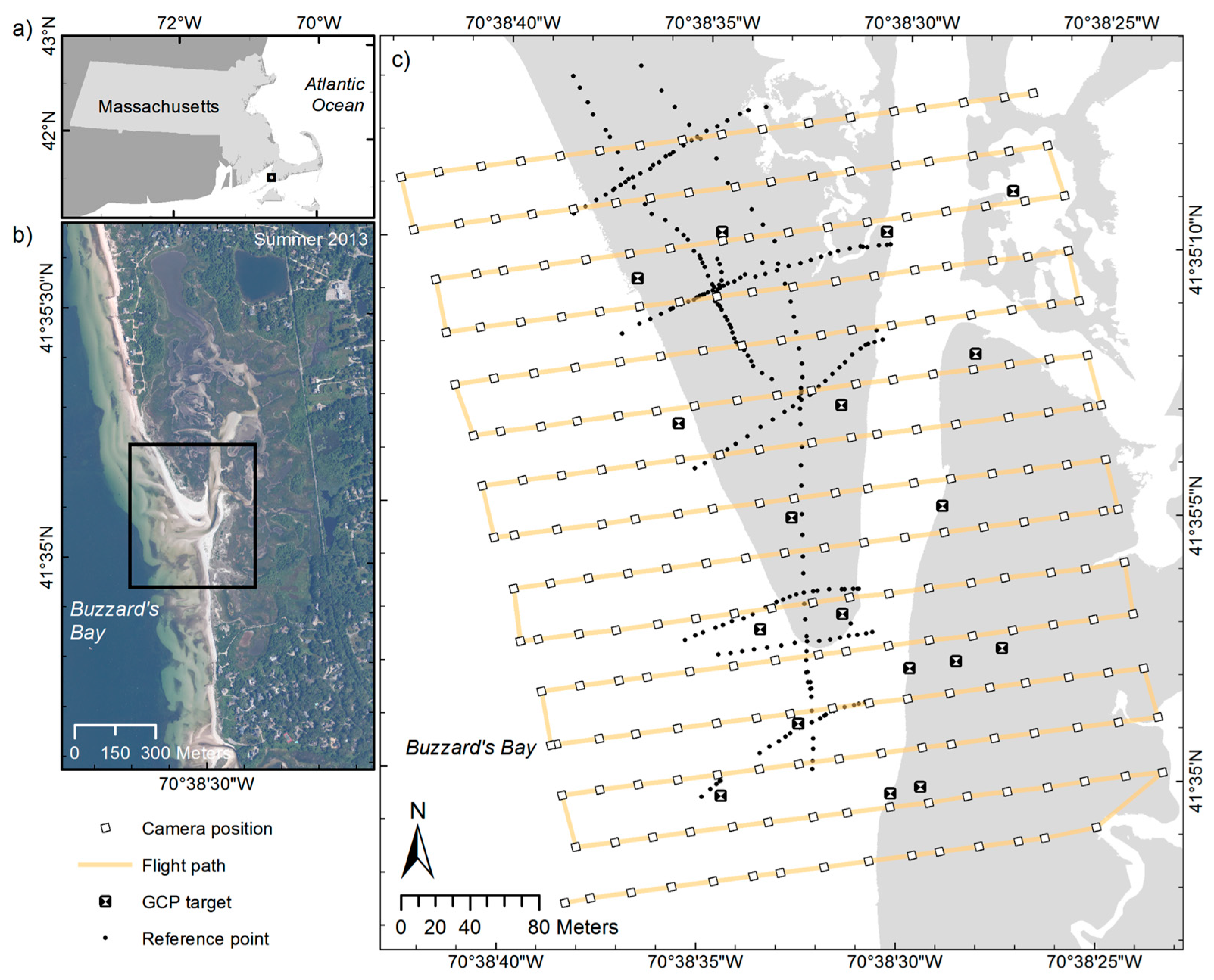
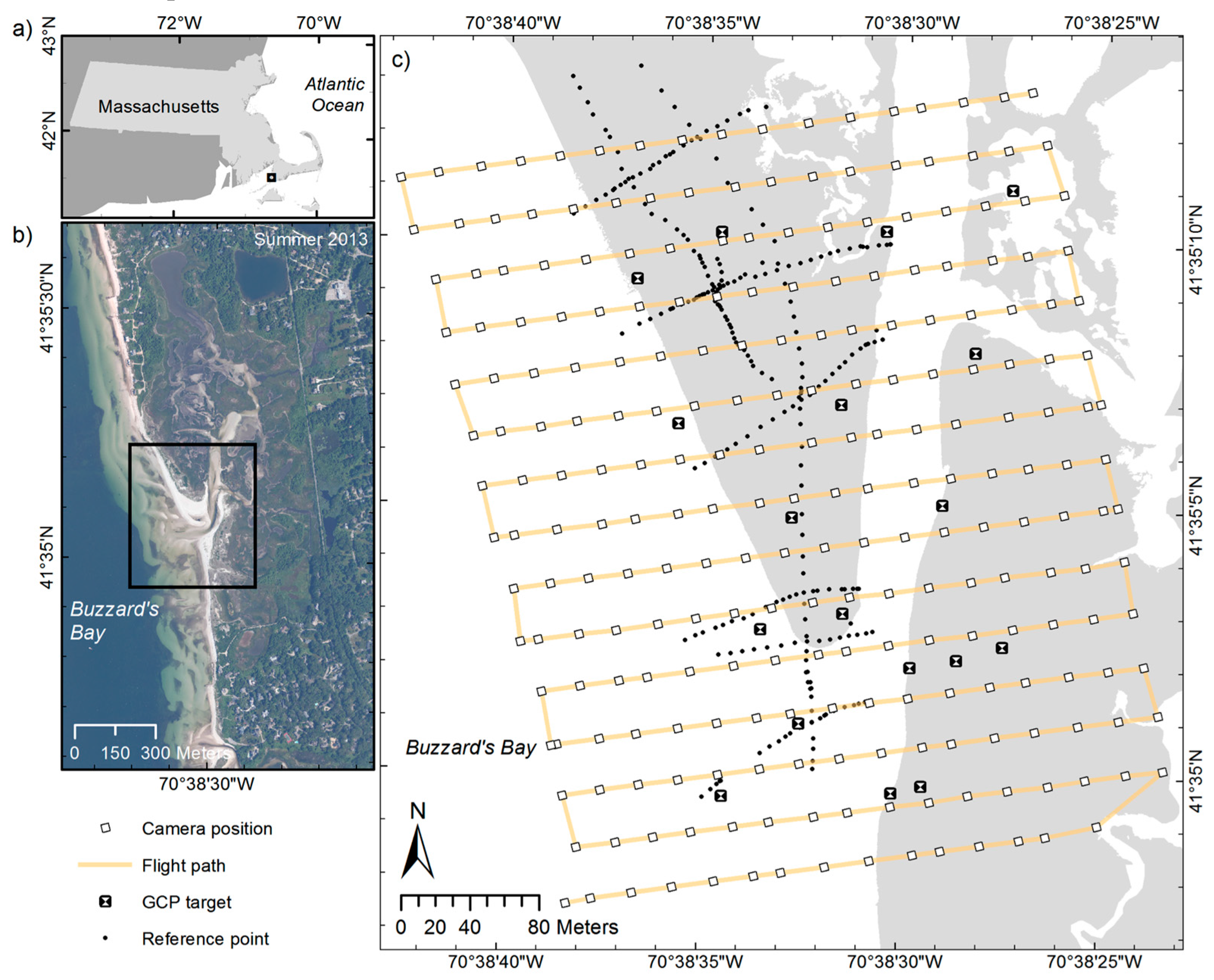
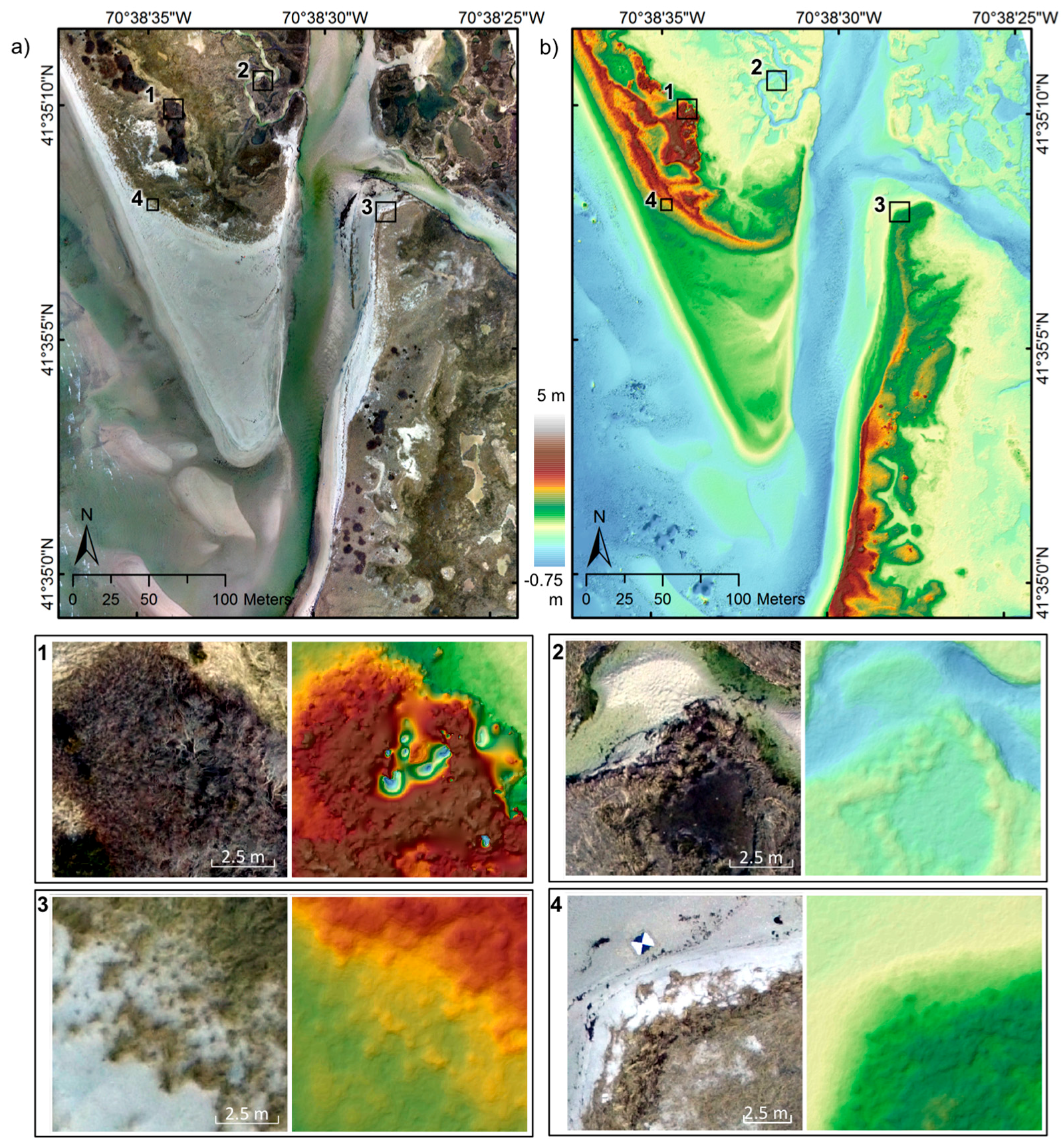
2.1. Study Area
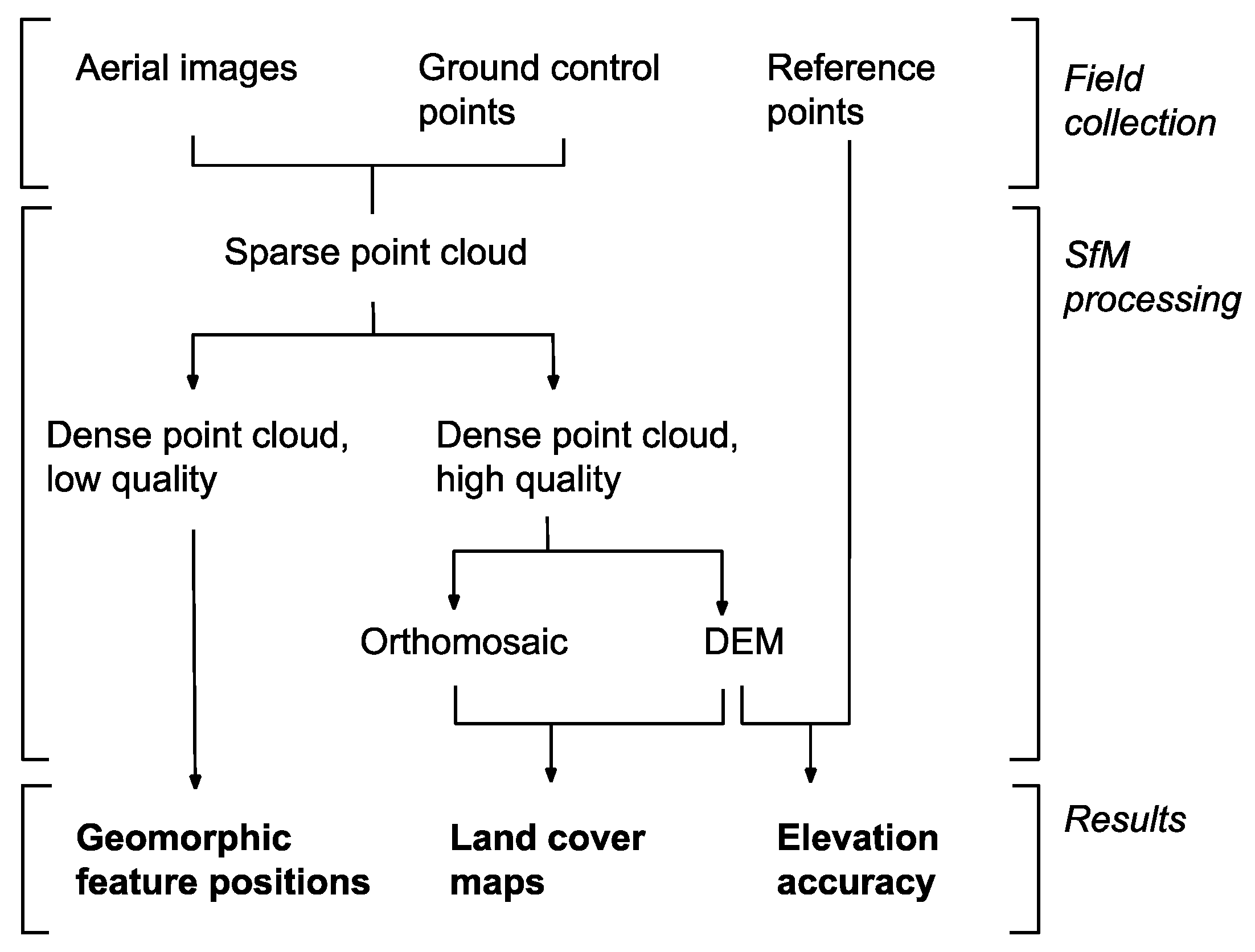
2.2. UAS-SfM Processing
2.2.1. Field Data Collection
2.2.2. Structure-from-Motion
2.3. Derived Products
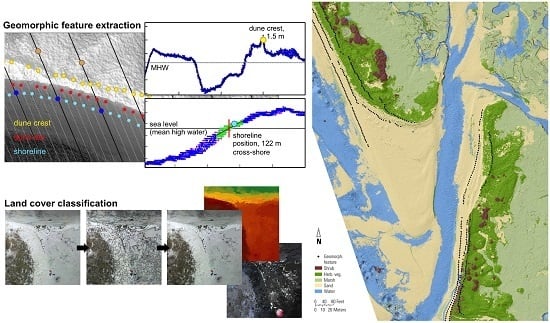
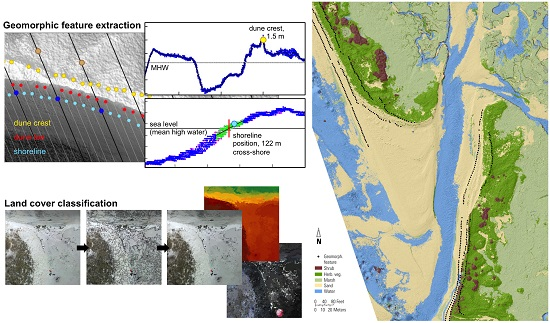
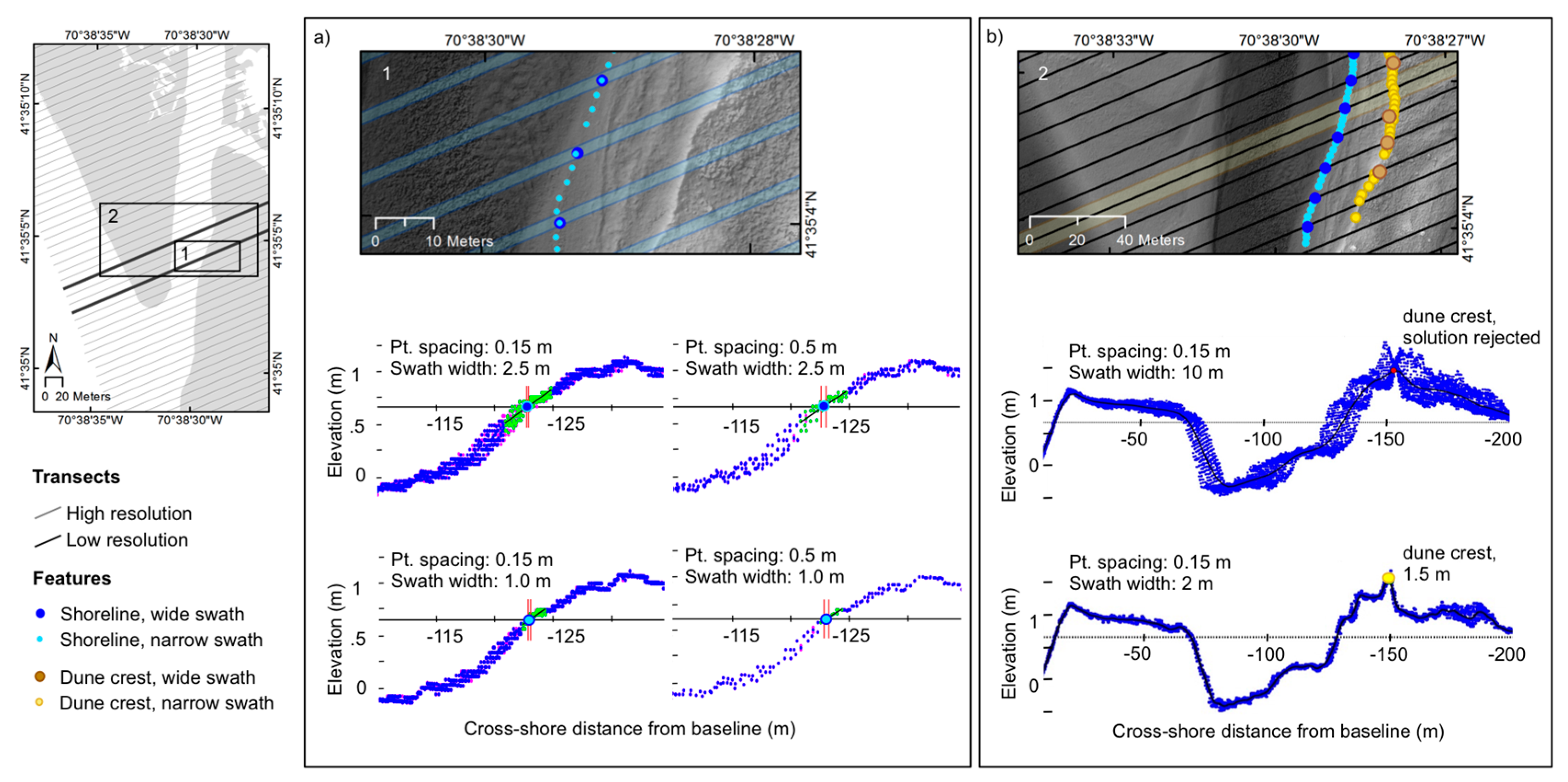
2.3.1. Geomorphic Feature Extraction
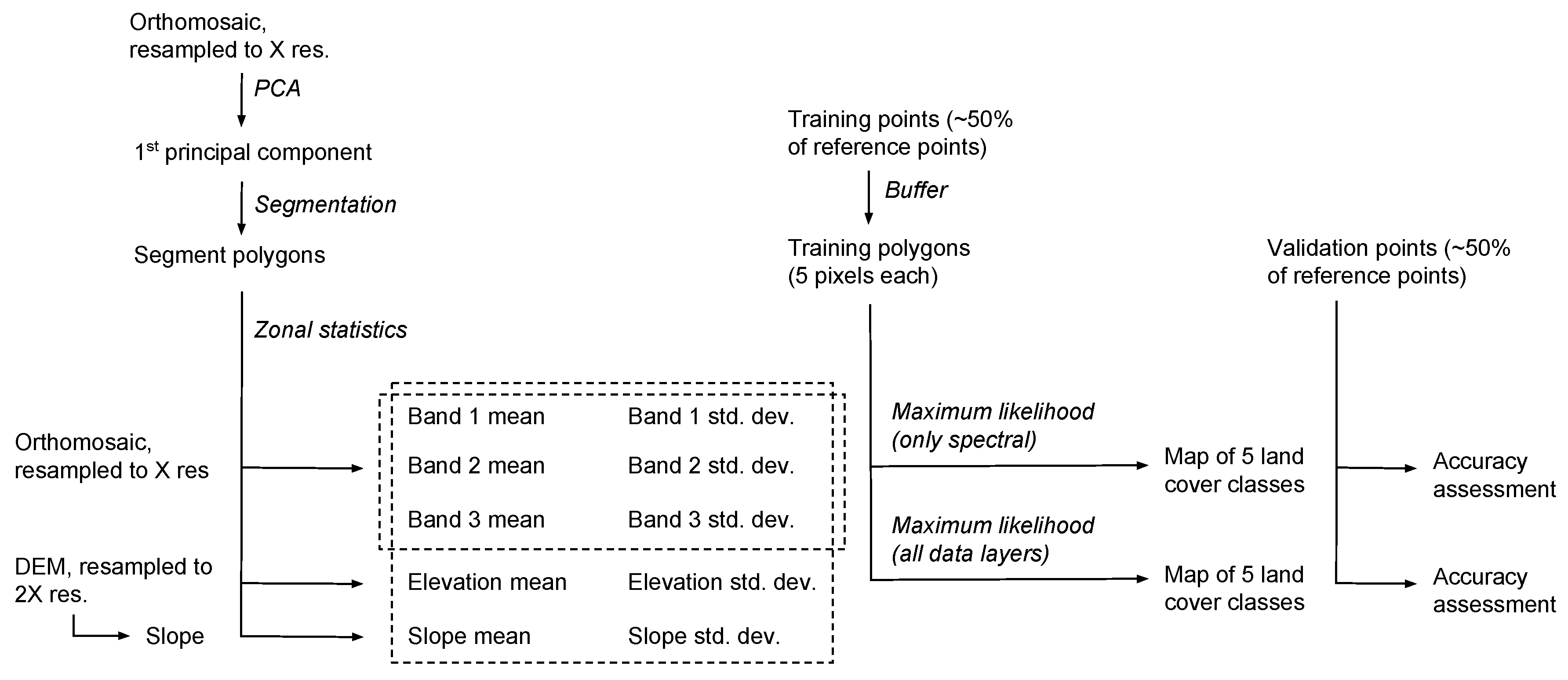
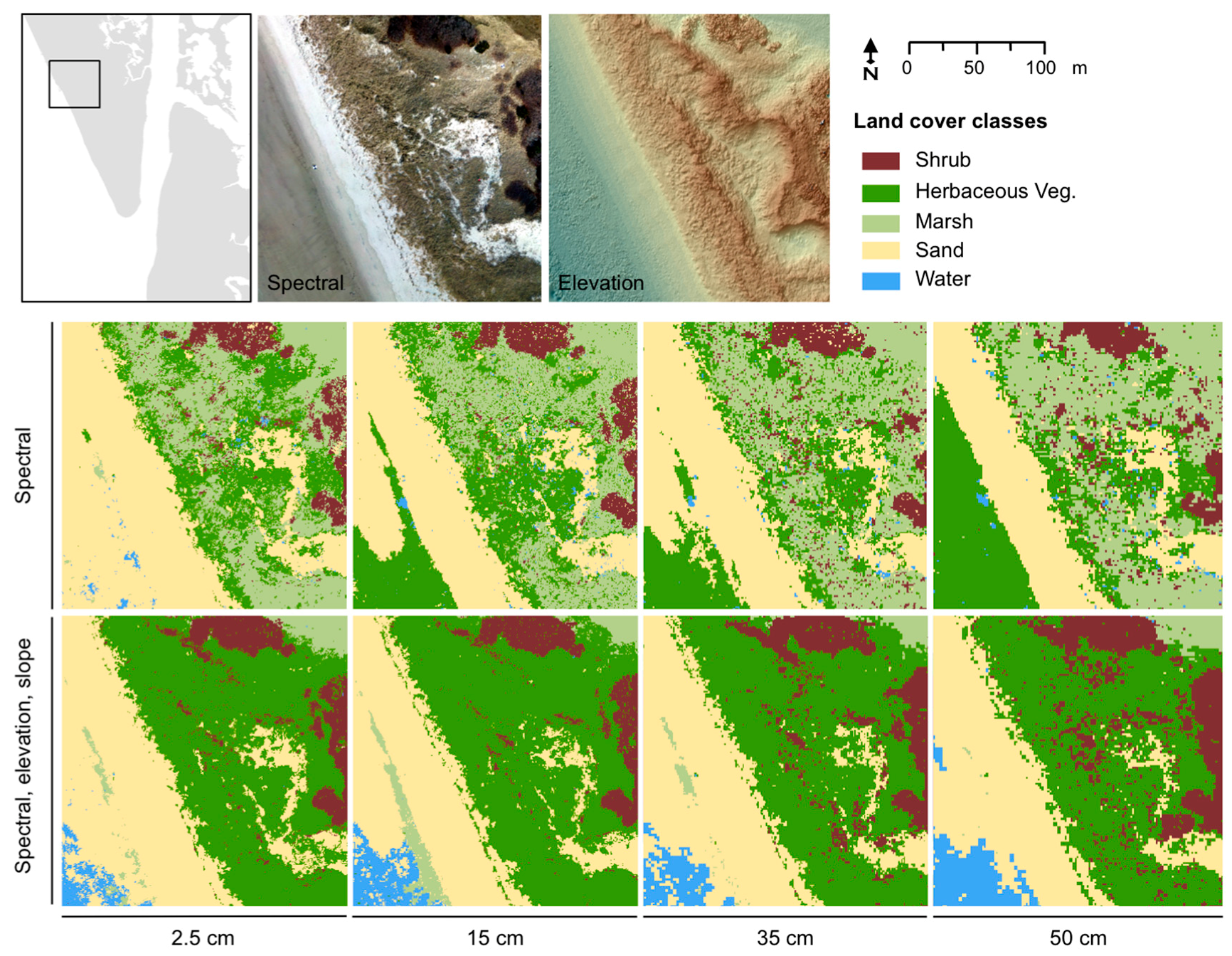
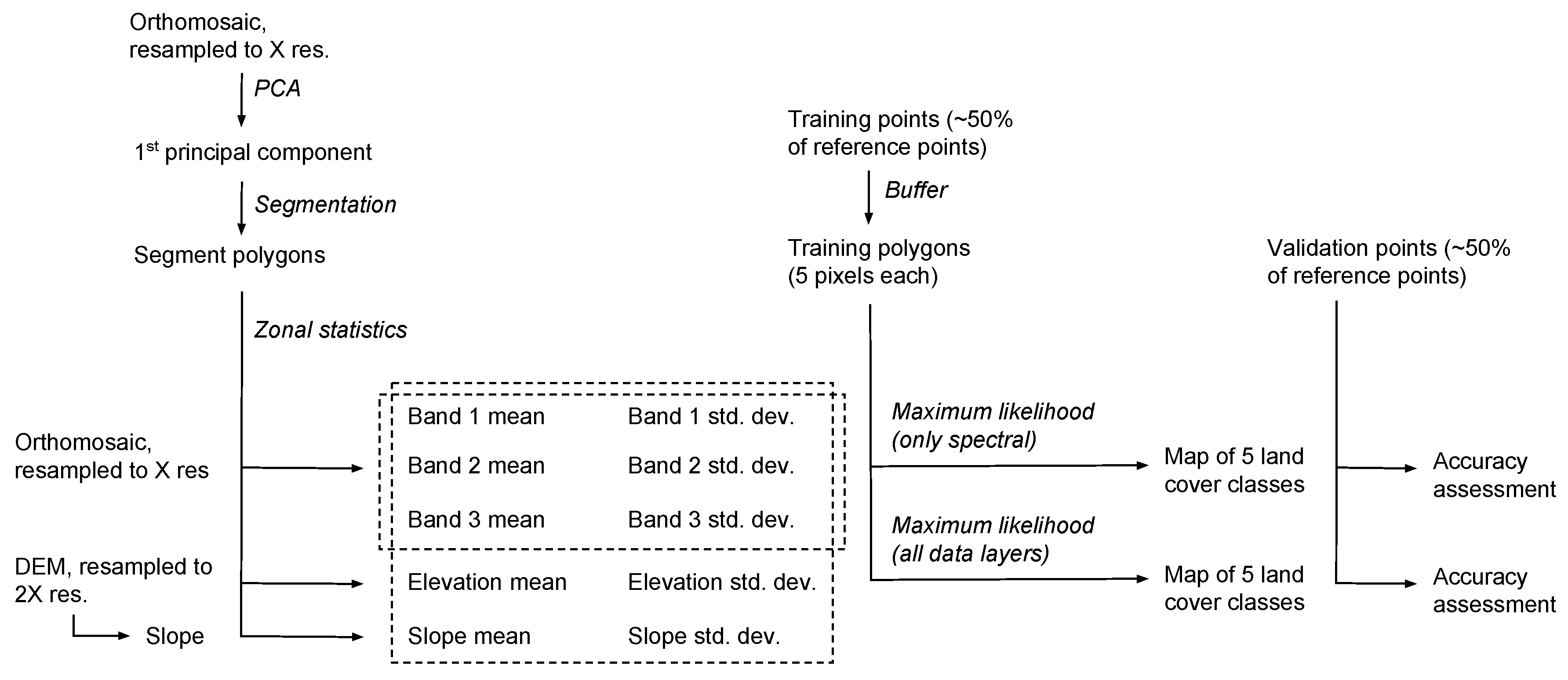
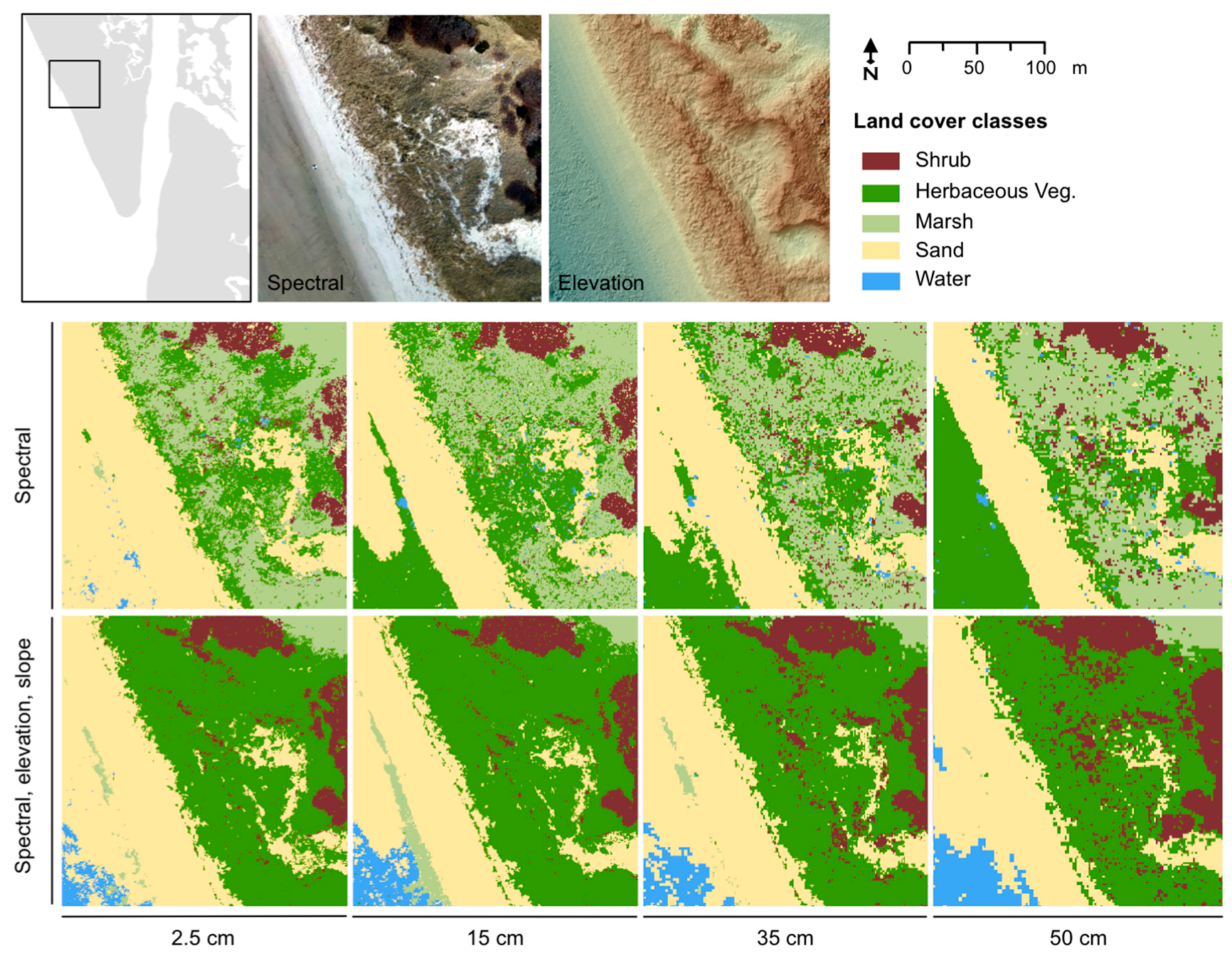
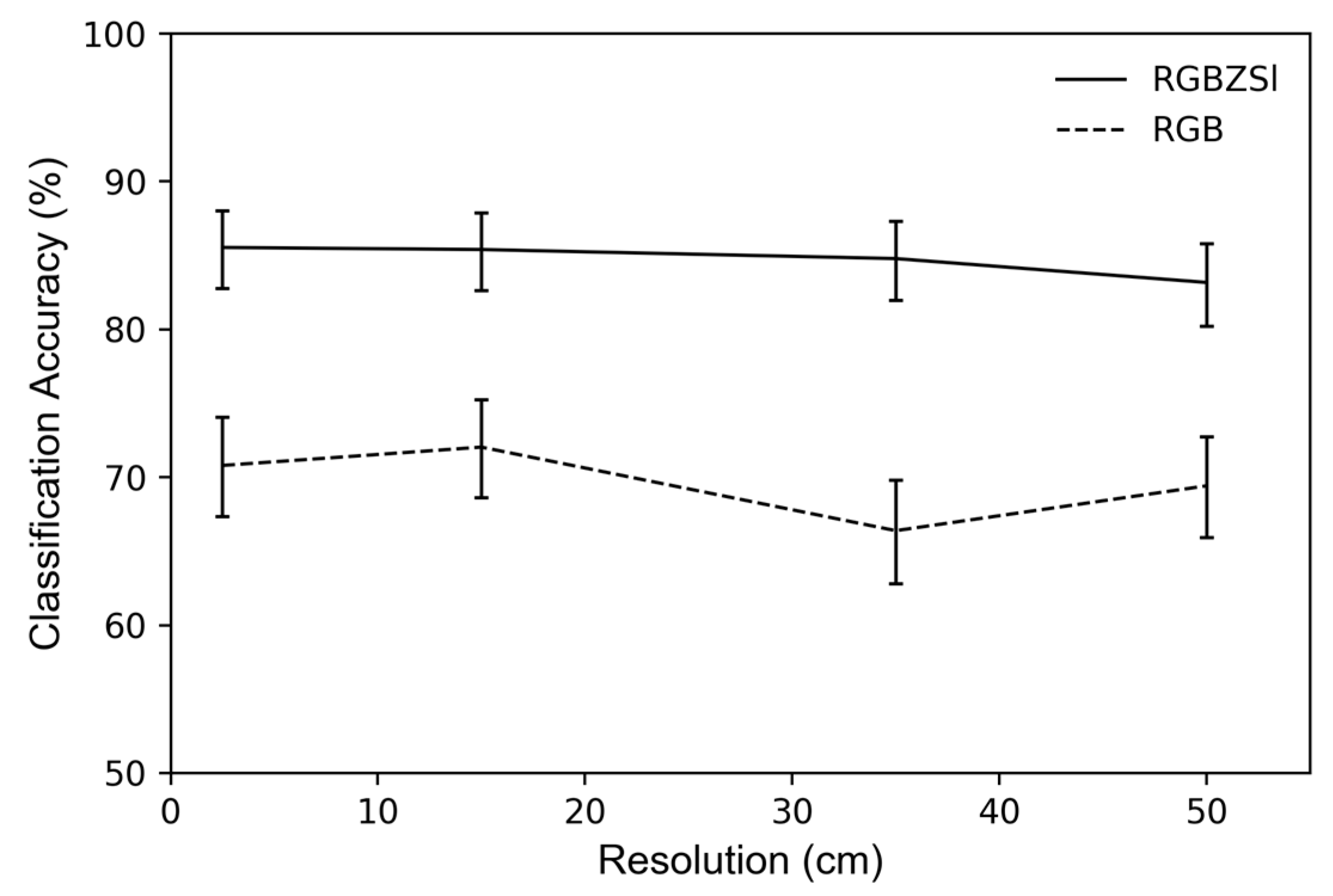
2.3.2. Land Cover Classification
3. Results
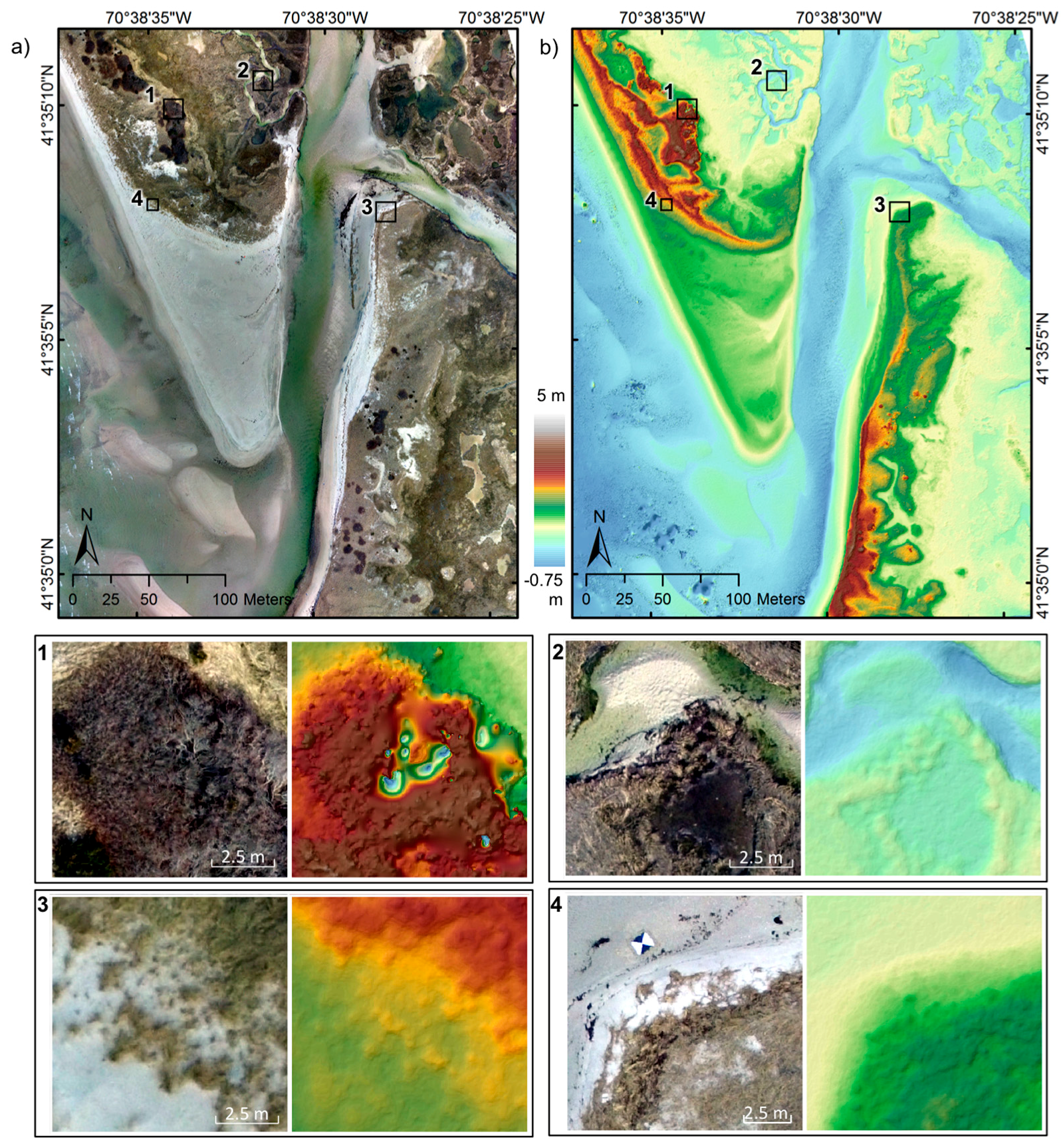
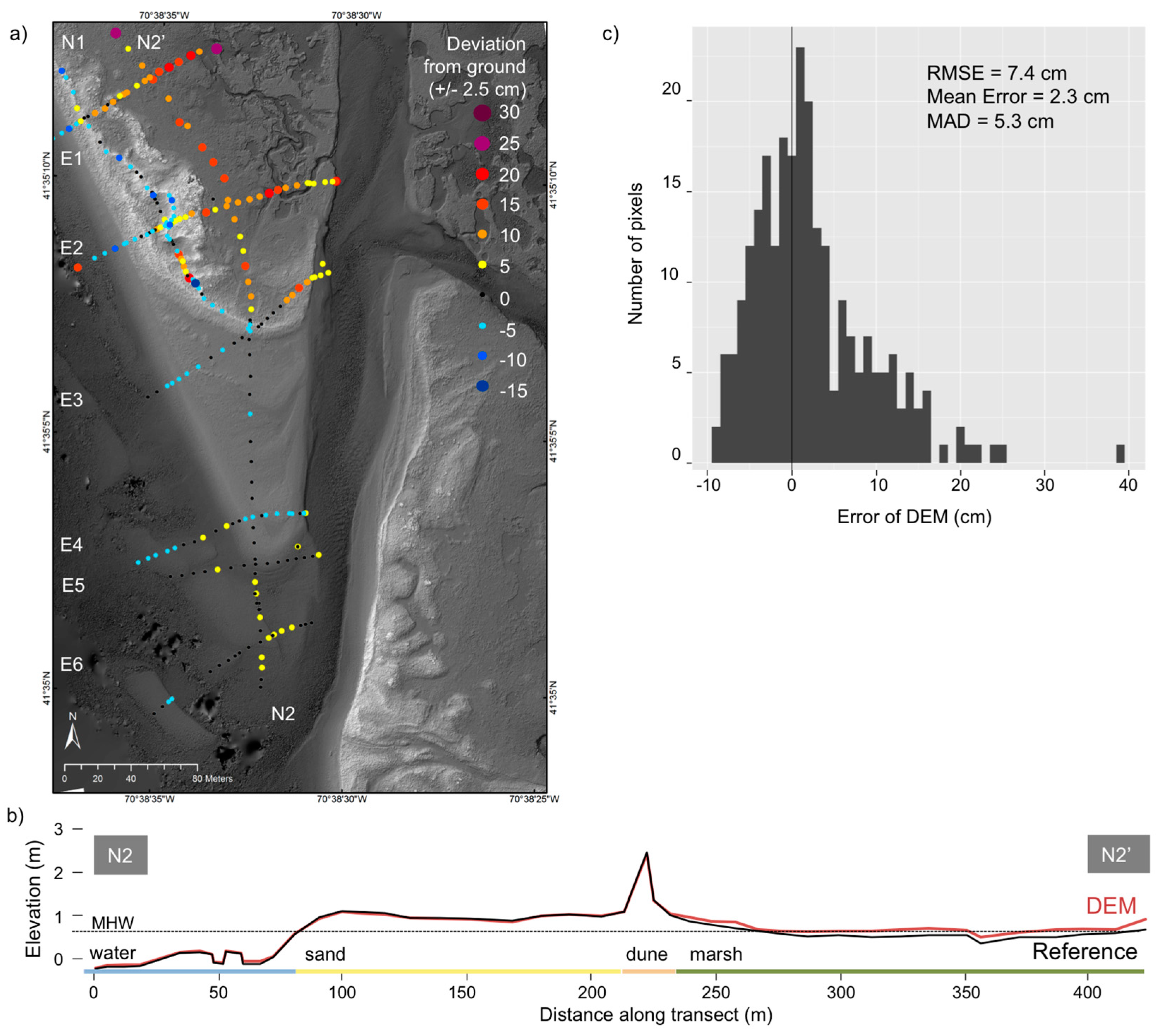
3.1. SfM Products: Elevation Surface Analysis
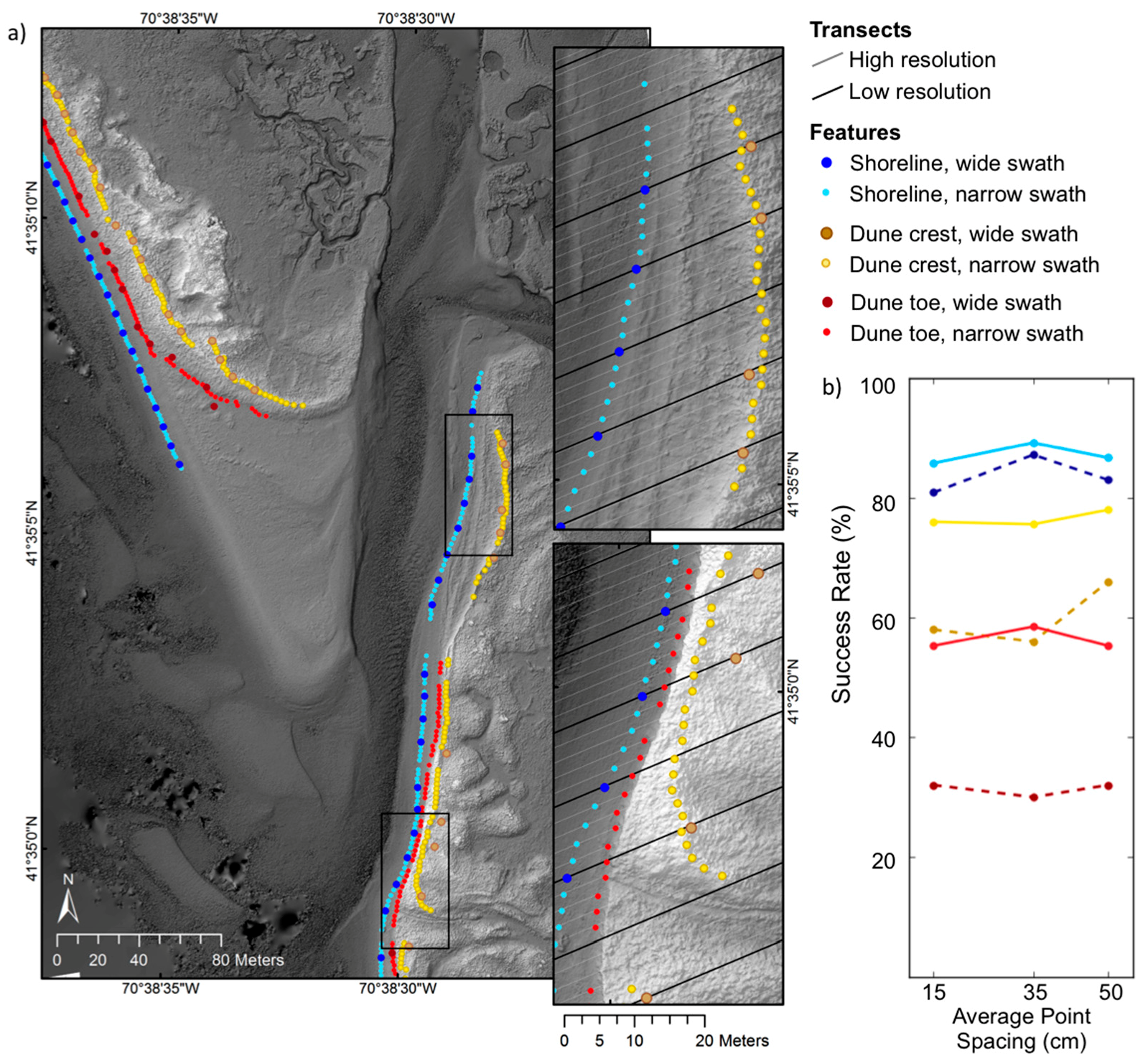
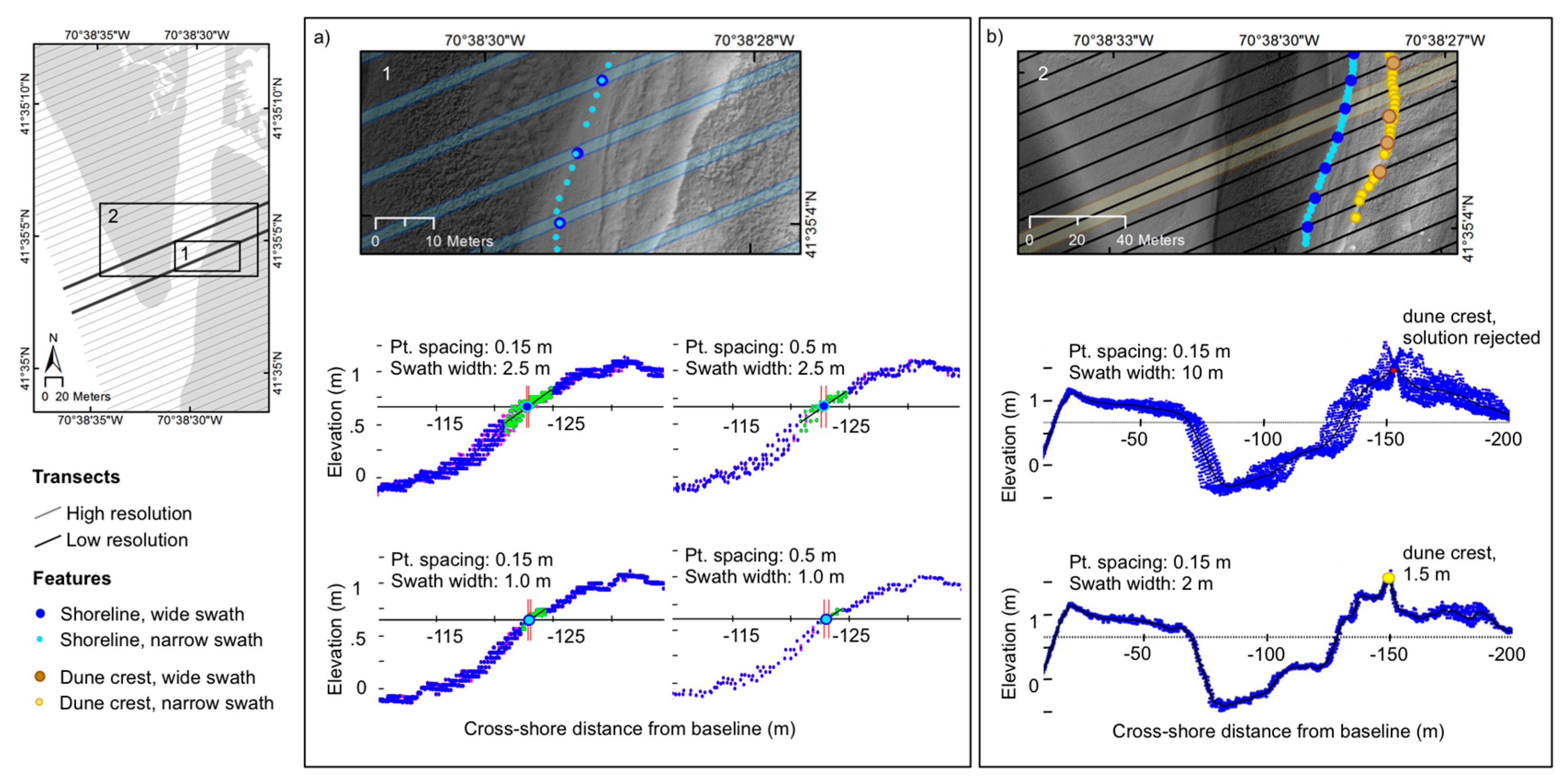
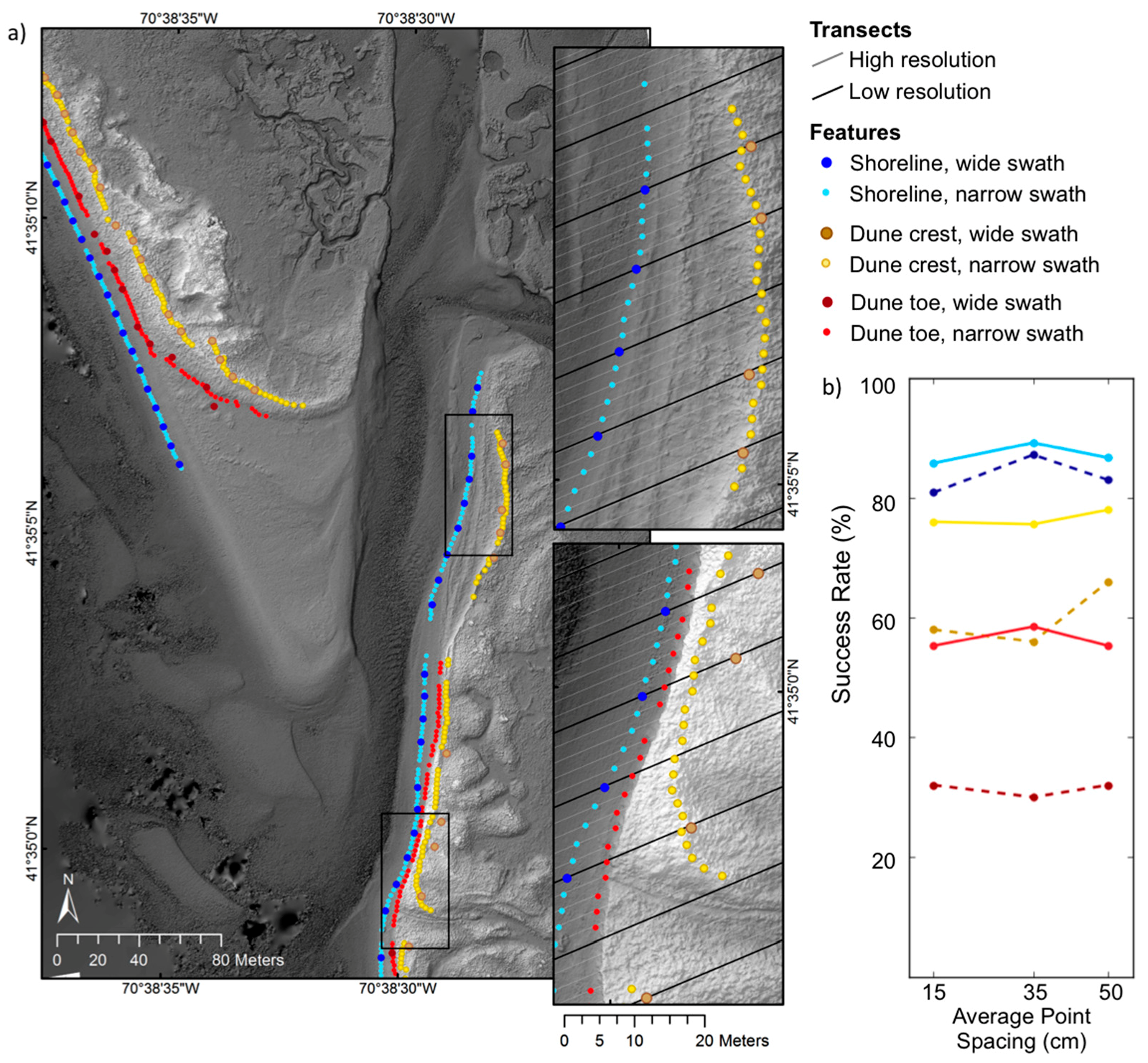
3.2. Geomorphic Feature Extraction
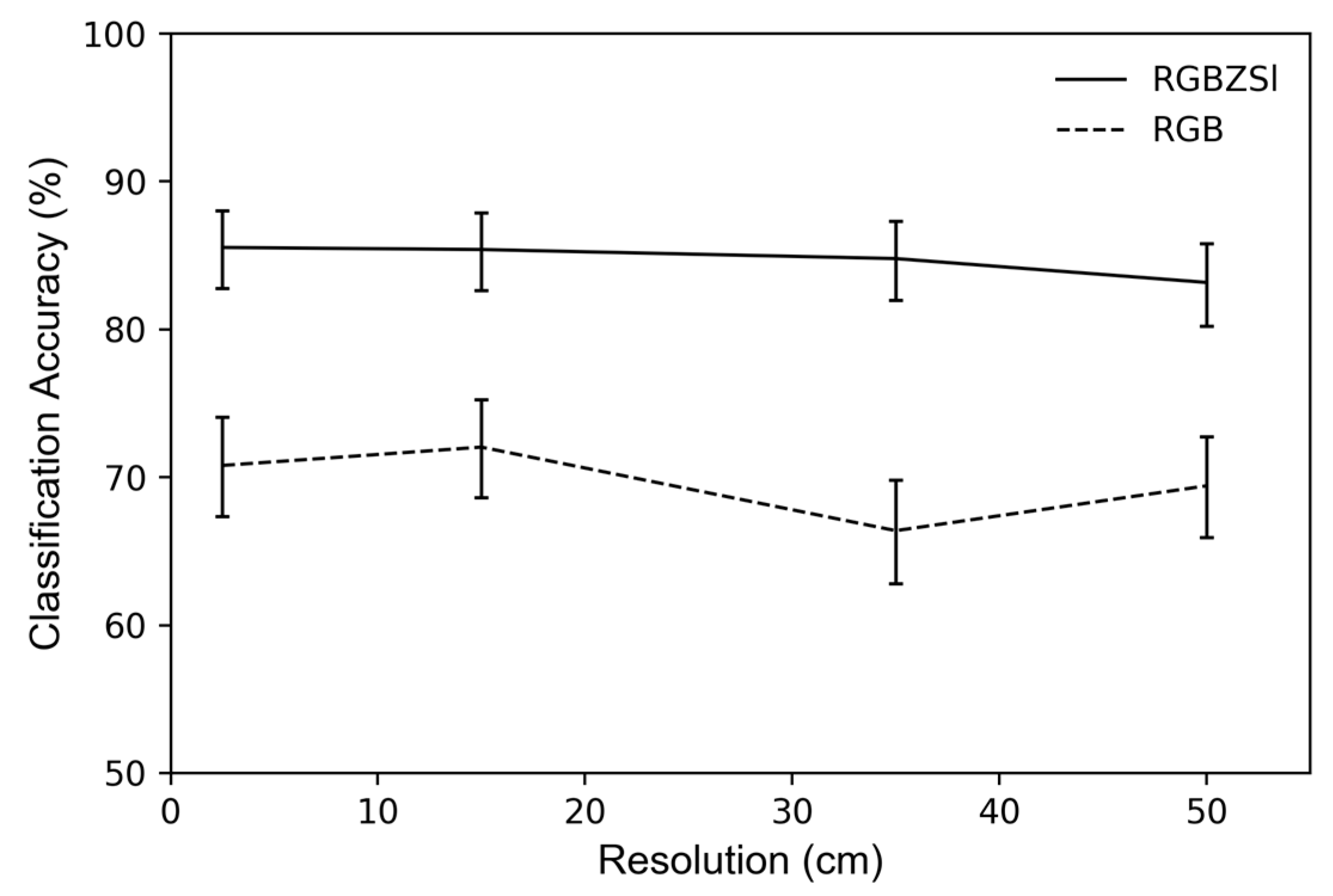
3.3. Land Cover Classification
4. Discussion
4.1. UAS-SfM Elevation for Coastal Zones
4.2. Geomorphic Feature Extraction
4.3. Land Cover Classification
4.4. Advantages, Trade-Offs, and Limitations
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Process Step | Process Description | PhotoScan Tools and Parameters | Output Properties |
|---|---|---|---|
| Add photos | Loaded all 250 cameras with high (>0.5 estimated) quality. Convert camera coordinates to projected coordinate system. Define camera location accuracy. | “Estimate Image Quality” “Convert” To: NAD83 UTM Zone 19N Reference Settings: Camera accuracy (m): 10 | Range of image quality: 0.69–1.26 |
| Import GCPs | Associated ground coordinates with GCP targets visible in images. Manually checked the placement of each GCP in the image. | “Detect markers” Tolerance: 50% Labeled each GCP in text file to correspond to the name of the marker in PhotoScan. “Import Markers…” to load GCP text file Northing: Local_N Easting: Local_E Altitude: Local_Z Display all the images with a GCP present and adjust the position of the marker if necessary. Reference Settings: Tie point accuracy (m): 0.005 | |
| Align photos | Generated sparse point cloud of tie points between photos. | “Align Photos” Accuracy: High Pair preselection: Reference Key point limit: 5000 Tie point limit: 0 | Aligned 211 photos |
| Optimize camera calibration 1 | Iteratively eliminated tie points to achieve an optimal error estimate. Optimized cameras after deleting set of points. Selected points based on several criteria of accuracy. | “Gradual selection” Reconstruction uncertainty: Level 10 Reconstruction uncertainty: Level 10 Projection accuracy: Level 9 Projection accuracy: Level 6 Reprojection error: Level 0.5 (~10% of remaining points) Manually delete points that are obviously removed from the general surface. | Initial marker error: 0.62 m Initial marker error: 0.58 pix Final marker error: 0.05 m Final marker error: 0.366 pix |
| Dense point cloud | Rotated and resized the region. Built the dense point cloud. | Rotate and resize the region to be generally orthogonal to lines of latitude and to limit the extent to just outside of the area with GCPs. “Build Dense Cloud” Quality: High Depth filtering: Mild | 67,885,040 points in the dense point cloud. |
| Refine the point cloud | Manually deleted points that are obviously separate from the surface. | Rotate the point cloud to view from the side and manually delete chunks of points that are isolated from the surface. | |
| Generate outputs | Exported a point cloud for shoreline extraction. Exported a DEM. Exported an orthomosaic. | “Build DEM” Source data: Dense Cloud Interpolation: Enabled “Build Orthomosaic” Type: Geographic Surface: DEM Blending mode: Mosaic | DEM resolution: 4.95 cm |
References
- Morton, R.A.; Leach, M.P.; Paine, J.G.; Cardoza, M.A. Monitoring Beach Changes Using GPS Surveying Techniques. J. Coast. Res. 1993, 9, 702–720. [Google Scholar]
- Stockdon, H.F.; Doran, K.S.; Sallenger, A.H.; Beach, W.P. Extraction of Lidar-Based Dune-Crest Elevations for Use in Examining the Vulnerability of Beaches to Inundation During Hurricanes. J. Coast. Res. 2009, SI, 59–65. [Google Scholar] [CrossRef]
- Thieler, E.R.; Danforth, W.W. Historical shoreline mapping (II): Application of the digital shoreline mapping and analysis systems (DSMS/DSAS) to shoreline change mapping in Puerto Rico. J. Coast. Res. 1994, 10, 600–620. [Google Scholar]
- Schwab, W.C.; Thieler, E.R.; Allen, J.R.; Foster, D.S.; Ann, B.; Denny, J.F.; Spring, F.; Inlet, S.; Island, L.; York, N.; et al. Influence of Inner-Continental Shelf Geologic Framework on the Evolution and Behavior of the Barrier-Island System Between Fire Island Inlet and Shinnecock Inlet, Long Island, New York. J. Coast. Res. 2000, 16, 408–422. [Google Scholar]
- McNinch, J.E. Geologic control in the nearshore: Shore-oblique sandbars and shoreline erosional hotspots, Mid-Atlantic Bight, USA. Mar. Geol. 2004, 211, 121–141. [Google Scholar] [CrossRef]
- Harris, M.S.; Gayes, P.T.; Kindinger, J.L.; Flocks, J.G.; Krantz, D.E.; Donovan, P. Quaternary Geomorphology and Modern Coastal Development in Response to an Inherent Geologic Framework: An Example from Charleston, South Carolina. J. Coast. Res. 2005, 211, 49–64. [Google Scholar] [CrossRef]
- Aagaard, T.; Davidson-Arnott, R.; Greenwood, B.; Nielsen, J. Sediment supply from shoreface to dunes: Linking sediment transport measurements and long-term morphological evolution. Geomorphology 2004, 60, 205–224. [Google Scholar] [CrossRef]
- Lentz, E.E.; Hapke, C.J.; Stockdon, H.F.; Hehre, R.E. Improving understanding of near-term barrier island evolution through multi-decadal assessment of morphologic change. Mar. Geol. 2013, 337, 125–139. [Google Scholar] [CrossRef]
- Hapke, C.J.; Kratzmann, M.G.; Himmelstoss, E.A. Geomorphic and human influence on large-scale coastal change. Geomorphology 2013, 199, 160–170. [Google Scholar] [CrossRef]
- Jin, S.; Yang, L.; Danielson, P.; Homer, C.; Fry, J.; Xian, G. A comprehensive change detection method for updating the National Land Cover Database to circa 2011. Remote Sens. Environ. 2013, 132, 159–175. [Google Scholar] [CrossRef]
- Burger, J. Physical and social determinants of nest-site selection in Piping Plover in New Jersey. Condor 1987, 89, 811–818. [Google Scholar] [CrossRef]
- Sallenger, A.H.; Krabill, W.B.; Swift, R.N.; Brock, J.C.; List, J.H.; Hansen, M.; Holman, R.A.; Manizade, S.; Sontag, J.; Meredith, A.; et al. Evaluation of airborne topographic lidar for quantifying beach changes. J. Coast. Res. 2003, 19, 125–133. [Google Scholar]
- Ruggiero, P.; Kaminsky, G.M.; Gelfenbaum, G.; Voigt, B. Seasonal to Interannual Morphodynamics along a High-Energy Dissipative Littoral Cell. J. Coast. Res. 2005, 21, 553–578. [Google Scholar] [CrossRef]
- FitzGerald, D.M.; Fenster, M.S.; Argow, B.A.; Buynevich, I.V. Coastal Impacts Due to Sea-Level Rise. Annu. Rev. Earth Planet. Sci. 2008, 36, 601–647. [Google Scholar] [CrossRef]
- Mason, D.C.; Gurney, C.; Kennett, M. Beach Topography Mapping: A Comparison of Techniques. J. Coast. Conserv. 2000, 6, 113–124. [Google Scholar] [CrossRef]
- Young, A.P.; Ashford, S.A. Application of Airborne LIDAR for Seacliff Volumetric Change and Beach-Sediment Budget Contributions. J. Coast. Res. 2006, 22, 307–318. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Harley, M.D.; Turner, I.L.; Short, A.D.; Ranasinghe, R. Assessment and integration of conventional, RTK-GPS and image-derived beach survey methods for daily to decadal coastal monitoring. Coast. Eng. 2011, 58, 194–205. [Google Scholar] [CrossRef]
- Casella, E.; Rovere, A.; Pedroncini, A.; Stark, C.P.; Casella, M.; Ferrari, M.; Firpo, M. Drones as tools for monitoring beach topography changes in the Ligurian Sea (NW Mediterranean). Geo-Mar. Lett. 2016, 1–13. [Google Scholar] [CrossRef]
- Sturdivant, E.J.; Lentz, E.E.; Thieler, E.R.; Remsen, D.P.; Miner, S. Topographic, Imagery, and Raw Data Associated with Unmanned Aerial Systems (UAS) Flights over Black Beach, Falmouth, Massachusetts on 18 March 2016; U.S. Geological Survey: Reston, VA, USA, 2017. [CrossRef]
- Stockdon, H.F.; Sallenger, A.H., Jr.; List, J.H.; Holman, R.A. Estimation of Shoreline Position and Change Using Airborne Topographic Lidar Data. J. Coast. Res. 2002, 18, 502–513. [Google Scholar]
- Sallenger, A.H. Storm Impact Scale for Barrier Islands. J. Coast. Res. 2000, 16, 890–895. [Google Scholar]
- Yang, Z.; Myers, E.P.; Jeong, I.; White, S.A. VDatum for the Gulf of Maine: Tidal Datums and the Topography of the Sea Surface. In Technical Memorandum NOS CS 31; National Oceanic and Atmospheric Administration: Silver Spring, MD, USA, 2013. [Google Scholar]
- Hartman, J.; Caswell, H.; Valiela, I. Effects of wrack accumulation on salt marsh vegetation. Oceanol. Acta 1983, (Special issue (0399-1784)), 99–102. Available online: http://archimer.ifremer.fr/doc/00247/35784 (accessed on 27 September 2017).
- Valiela, I.; Teal, J.M. The nitrogen budget of a salt marsh ecosystem. Nature 1979, 280, 652–656. [Google Scholar] [CrossRef]
- Hapke, C.J.; Himmelstoss, E.A.; Kratzmann, M.G.; List, J.H.; Thieler, E.R. National Assessment of Shoreline Change: Historical Shoreline Change along the New England and Mid-Atlantic Coasts. In Open-File Report 2010-1118; U.S. Geological Survey: Reston, VA, USA, 2011; p. 57. [Google Scholar]
- Thieler, E.R.; Smith, T.L.; Knisel, J.M.; Sampson, D.W. Massachusetts Shoreline Change Mapping and Analysis Project, 2013 Update. In Technical Report 2012–1189; U.S. Geological Survey: Reston, VA, USA, 2013. [Google Scholar]
- Tucker, J.; Barker, B.; Geyer, R.; Muramoto, J.A.; Schwarzman, B.; Taylor, D.; Thieler, R.; Weidman, C. The Future of Falmouth’s Buzzards Bay Shore: Report of the Coastal Resources Working Group to the Board of Selectmen, Falmouth, Massachusetts. Available online: http://www.falmouthmass.us/documentcenter/view/4005 (accessed on 27 September 2017).
- Massachusetts Natural Heritage & Endangered Species Program. Summary of the 2016 Massachusetts Piping Plover Census; Natural Heritage and Endangered Species Program & Endangered Species Program Massachusetts Division of Fisheries & Wildlife: Westborough, MA, USA, 2016.
- Lucieer, A.; de Jong, S.M.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Warrick, J.A.; Ritchie, A.C.; Adelman, G.; Adelman, K.; Limber, P.W. New Techniques to Measure Cliff Change from Historical Oblique Aerial Photographs and Structure-from-Motion Photogrammetry. J. Coast. Res. 2016, 32. [Google Scholar] [CrossRef]
- Agisoft PhotoScan. Agisoft Community Forum. Available online: http://www.agisoft.com/forum/index.php?topic=1970.0 (accessed on 27 September 2017).
- Agisoft. Agisoft Photoscan User Manual: Professional Edition; Agisoft LLC: St. Petersburg, Russia, 2015. [Google Scholar]
- Stockdon, H.F.; Doran, K.J.; Thompson, D.M.; Sopkin, K.L.; Plant, N.G. National Assessment of Hurricane-Induced Coastal Erosion Hazards: Gulf of Mexico; U.S. Geological Survey: Reston, VA, USA, 2012.
- Plant, N.G.; Holland, K.T.; Puleo, J.A. Analysis of the scale of errors in nearshore bathymetric data. Mar. Geol. 2002, 191, 71–86. [Google Scholar] [CrossRef]
- Hapke, C.J.; Reid, D.; Richmond, B.M.; Ruggiero, P.; List, J. National Assessment of Shoreline Change, Part 3: Historical Shoreline Change and Associated Coastal Land Loss along Sandy Shorelines of the California Coast; U.S. Geological Survey: Reston, VA, USA, 2006.
- Syed, S.; Dare, P.; Jones, S. Automatic classification of land cover features with high resolution imagery and LIDAR data: An object-oriented approach. In Proceedings of the SSC2005 Spatial Intelligence, Innovation and Praxis: The National Biennial Conference of the Spatial Sciences Institut, Los Angeles, CA, USA, September 2005; Spatial Sciences Institute: Los Angeles, CA, USA, 2005; pp. 512–522. [Google Scholar]
- Moran, E.F. Land Cover Classification in a Complex Urban-Rural Landscape with Quickbird Imagery. Photogramm. Eng. Remote Sens. 2010, 76, 159–1168. [Google Scholar]
- Myint, S.W.; Gober, P.; Brazel, A.; Grossman-Clarke, S.; Weng, Q. Per-pixel vs. object-based classification of urban land cover extraction using high spatial resolution imagery. Remote Sens. Environ. 2011, 115, 1145–1161. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Rango, A. Texture and scale in object-based analysis of subdecimeter resolution unmanned aerial vehicle (UAV) imagery. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1–10. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Rango, A. Image Processing and Classification Procedures for Analysis of Sub-decimeter Imagery Acquired with an Unmanned Aircraft over Arid Rangelands. GIScience Remote Sens. 2011, 48, 4–23. [Google Scholar] [CrossRef]
- Ventura, D.; Bruno, M.; Jona Lasinio, G.; Belluscio, A.; Ardizzone, G. A low-cost drone based application for identifying and mapping of coastal fish nursery grounds. Estuari. Coast. Shelf Sci. 2016, 171, 85–98. [Google Scholar] [CrossRef]
- Gieder, K.D.; Karpanty, S.M.; Fraser, J.D.; Catlin, D.H.; Gutierrez, B.T.; Plant, N.G.; Turecek, A.M.; Robert Thieler, E. A Bayesian network approach to predicting nest presence of the federally-threatened piping plover (Charadrius melodus) using barrier island features. Ecol. Model. 2014, 276, 38–50. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Sherwood, C.R. Point Cloud from Low-Altitude Aerial Imagery from Unmanned Aerial System (UAS) Flights over Coast Guard Beach, Nauset Spit, Nauset Inlet, and Nauset Marsh, Cape Cod National Seashore, Eastham, Massachusetts on 1 March 2016 (LAZ file); U.S. Geological Survey: Reston, VA, USA, 2017.
- Hehre, R.E.; Hapke, C.J. Development of Historical Topographic Models of the Beach/Dune System in Northeast Coastal and Barrier Network Parks: Progress 13 August 2008. Technical Report March, 2010. Available online: https://irma.nps.gov/DataStore/Reference/Profile/2239454 (accessed on 27 September 2017).
- Congalton, R.G. A review of assessing the accuracy of classification of remotely sensed data. Remote Sens. Environ. 1991, 37, 34–46. [Google Scholar] [CrossRef]
- Foody, G.M. Status of land cover classification accuracy assessment. Remote Sens. Environ. 2002, 80, 185–201. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2015, 40. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Whitehead, K.; Brown, O.W.; Barchyn, T.E.; Moorman, B.J.; LeClair, A.; Riddell, K.; Hamilton, T. Geomorphological mapping with a small unmanned aircraft system (sUAS): Feature detection and accuracy assessment of a photogrammetrically-derived digital terrain model. Geomorphology 2013, 194, 16–24. [Google Scholar] [CrossRef]
- Mitasova, H.; Overton, M.F.; Recalde, J.J.; Bernstein, D.J.; Freeman, C.W. Raster-Based Analysis of Coastal Terrain Dynamics from Multitemporal Lidar Data. J. Coast. Res. 2009, 252, 507–514. [Google Scholar] [CrossRef]
- Heidemann, H.K. Lidar Base Specification (ver. 1.2); U.S. Geological Survey: Reston, VA, USA, 2014; p. 41.
- NOAA National Ocean Service. 2013–2014 U.S. Geological Survey CMGP LiDAR: Post Sandy (MA, NH, RI); National Oceanic and Atmospheric Administration: Silver Springs, MD, USA, 2015.
- Abdullah, Q.; Maune, D.; Smith, D.; Heidemann, H.K. ASPRS Positional Accuracy Standards for Digital Geospatial Data. Photogramm. Eng. Remote Sens. 2015, 81, 1–26. [Google Scholar]
- Cunliffe, A.M.; Brazier, R.E.; Anderson, K. Ultrafine grain landscape-scale quantification of dryland vegetation structure with drone-acquired structure-from-motion photogrammetry. Remote Sens. Environ. 2016, 183, 129–143. [Google Scholar] [CrossRef] [Green Version]
- Gutierrez, B.T.; Plant, N.G.; Thieler, E.R.; Turecek, A.M. Using a Bayesian network to predict barrier island geomorphologic characteristics. J. Geophys. Res. Earth Surf. 2015, 120, 2452–2475. [Google Scholar] [CrossRef]
- Rogan, J.; Miller, J.; Stow, D.; Franklin, J.; Levien, L.; Fischer, C. Land-cover change monitoring with classification trees using Landsat TM and ancillary data. Photogramm. Eng. Remote Sens. 2003, 69, 793–804. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV Photogrammetry for Topographic Monitoring of Coastal Areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]

| Land Cover | N | Mean Error (cm) | MAD (cm) | RMSEZ (cm) |
|---|---|---|---|---|
| Herbaceous Vegetation | 76 | 1.1 | 4.9 | 6.2 |
| Marsh | 46 | 11.6 | 11.6 | 12.8 |
| Sand | 102 | −1.6 | 2.9 | 3.6 |
| 1 Shrub | 2 | 23.8 | 23.8 | 28.3 |
| Water | 24 | 2.9 | 3.2 | 4.3 |
| Feature Type | Swath Width (m) | Number of Transects | Point Spacing | ||
|---|---|---|---|---|---|
| 15-cm | 35-cm | 50-cm | |||
| Shoreline | 2 | 47 | 80.9 | 87.2 | 83 |
| 1 | 240 | 85.8 | 89.2 | 86.7 | |
| Dune crest | 10 | 50 | 58 | 56 | 66 |
| 2 | 246 | 76 | 75.6 | 78 | |
| Dune toe | 10 | 50 | 32 | 30 | 32 |
| 2 | 246 | 55.3 | 58.5 | 55.3 | |
| Land Cover | Number of Validation Samples | RGB | RGBZSl | Difference (RGBZSl–RGB) | |||
|---|---|---|---|---|---|---|---|
| Producer’s Accuracy (%) | User’s Accuracy (%) | Producer’s Accuracy (%) | User’s Accuracy (%) | Producer’s Accuracy (%) | User’s Accuracy (%) | ||
| Herbaceous Veg. | 127 | 58.3 | 48.0 | 82.5 | 83.6 | 24.2 | 35.7 |
| Marsh | 216 | 65.6 | 71.3 | 87.8 | 89.9 | 22.2 | 18.7 |
| Sand | 190 | 79.7 | 78.2 | 87.0 | 80.5 | 7.3 | 2.3 |
| Shrub | 42 | 86.9 | 55.4 | 97.6 | 77.5 | 10.7 | 22.0 |
| Water | 148 | 67.6 | 91.9 | 75.6 | 88.2 | 8.0 | −3.7 |
| Overall Accuracy (%) | 69.7 | 84.7 | 15.1 | ||||
| Kappa (%) | 0.6 | 80.1 | 79.5 | ||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sturdivant, E.J.; Lentz, E.E.; Thieler, E.R.; Farris, A.S.; Weber, K.M.; Remsen, D.P.; Miner, S.; Henderson, R.E. UAS-SfM for Coastal Research: Geomorphic Feature Extraction and Land Cover Classification from High-Resolution Elevation and Optical Imagery. Remote Sens. 2017, 9, 1020. https://doi.org/10.3390/rs9101020
Sturdivant EJ, Lentz EE, Thieler ER, Farris AS, Weber KM, Remsen DP, Miner S, Henderson RE. UAS-SfM for Coastal Research: Geomorphic Feature Extraction and Land Cover Classification from High-Resolution Elevation and Optical Imagery. Remote Sensing. 2017; 9(10):1020. https://doi.org/10.3390/rs9101020
Chicago/Turabian StyleSturdivant, Emily J., Erika E. Lentz, E. Robert Thieler, Amy S. Farris, Kathryn M. Weber, David P. Remsen, Simon Miner, and Rachel E. Henderson. 2017. "UAS-SfM for Coastal Research: Geomorphic Feature Extraction and Land Cover Classification from High-Resolution Elevation and Optical Imagery" Remote Sensing 9, no. 10: 1020. https://doi.org/10.3390/rs9101020