An Improved Shape Contexts Based Ship Classification in SAR Images



Abstract
:
1. Introduction
2. The Proposed Classification Method
2.1. Problem Description
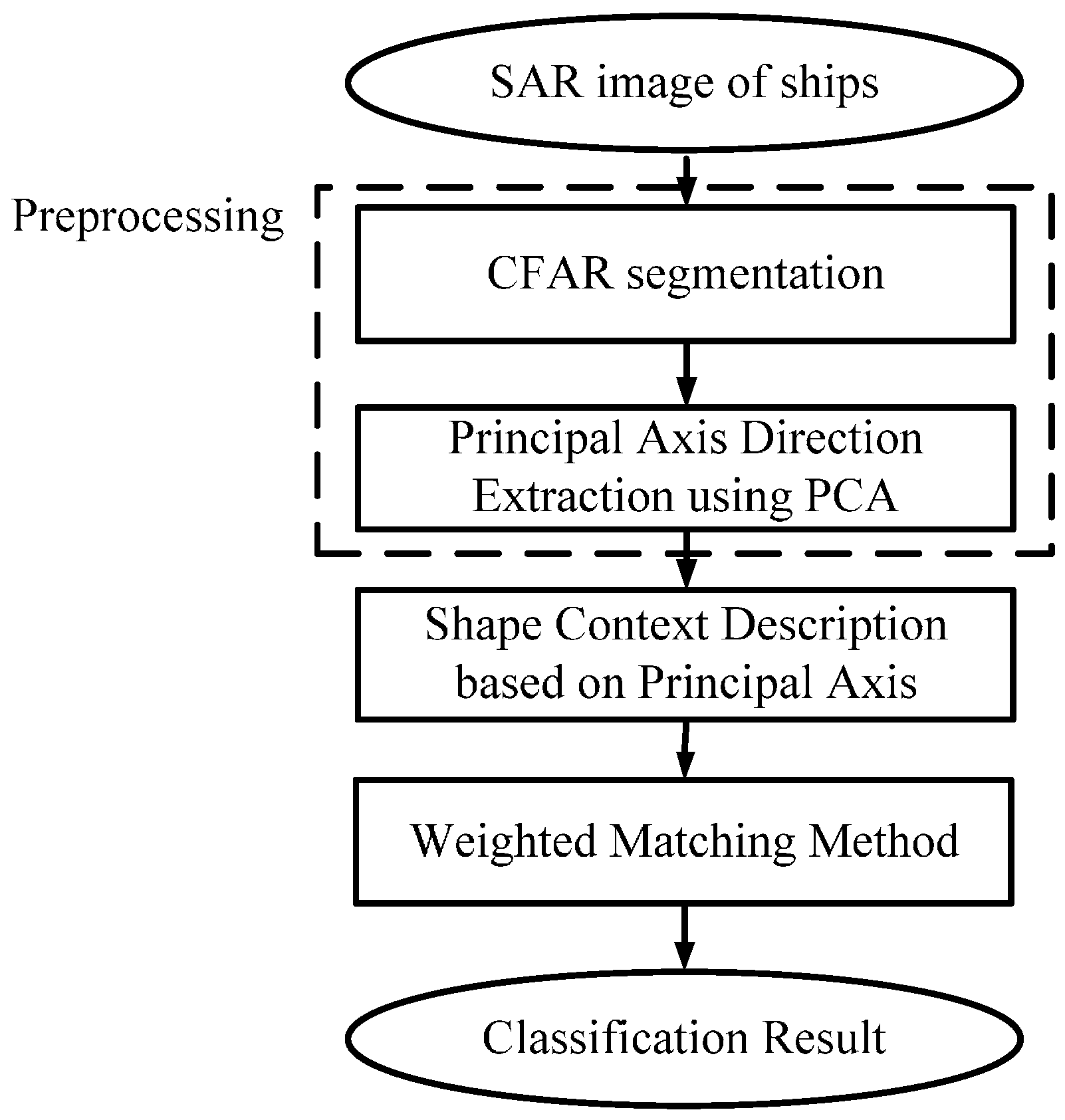
2.2. Proposed Ship Classification Method
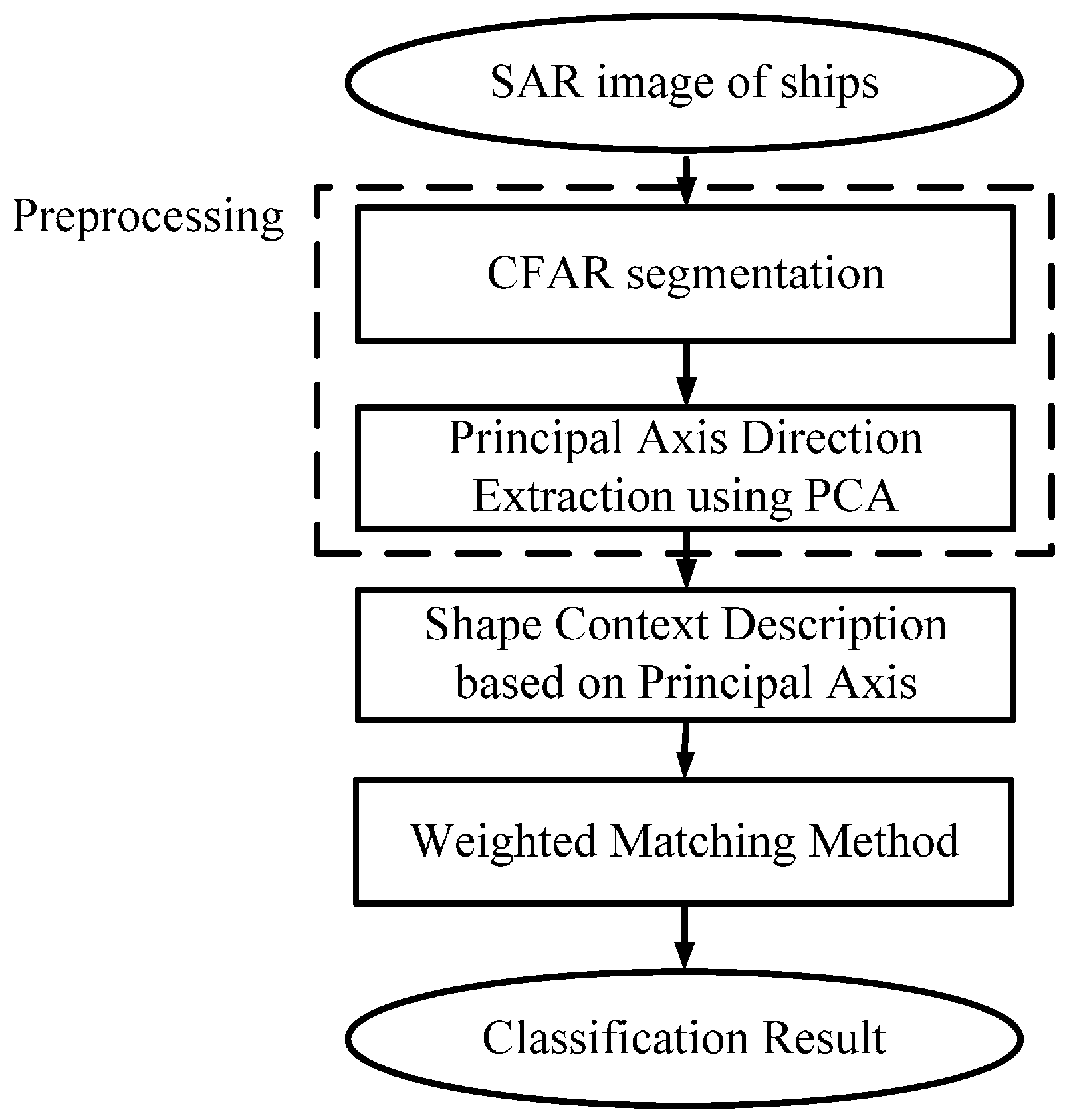
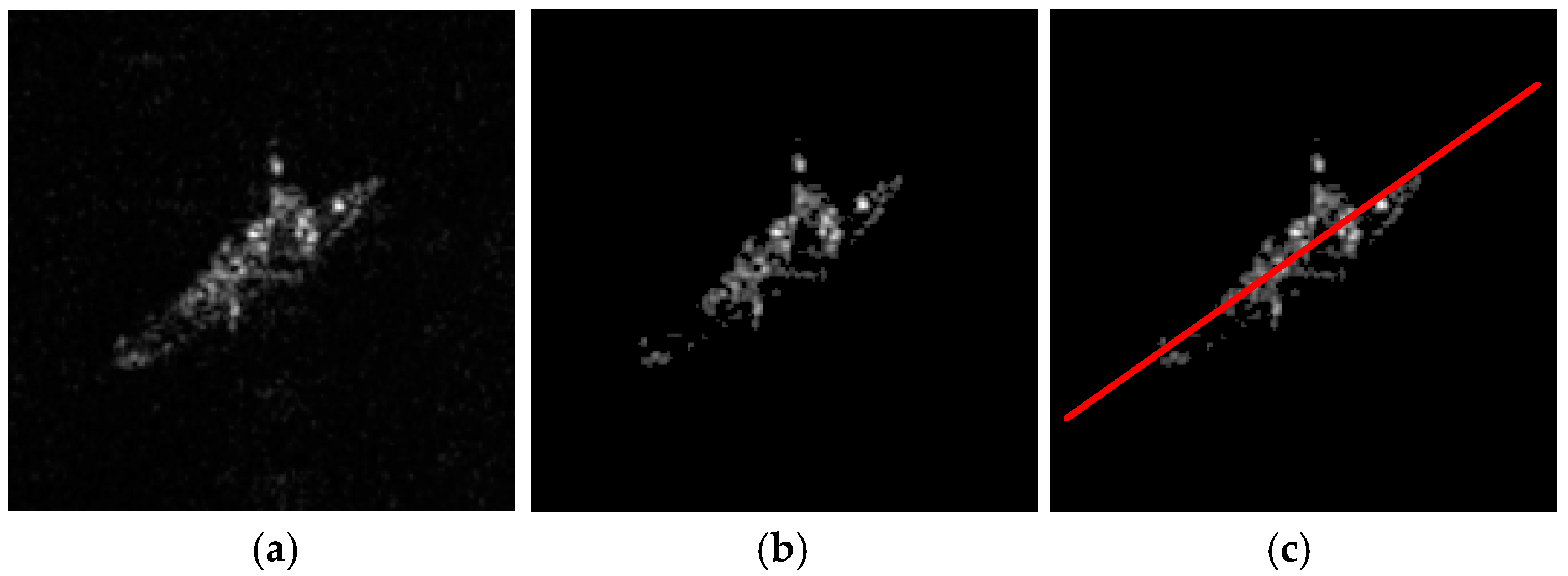
2.2.1. Preprocessing
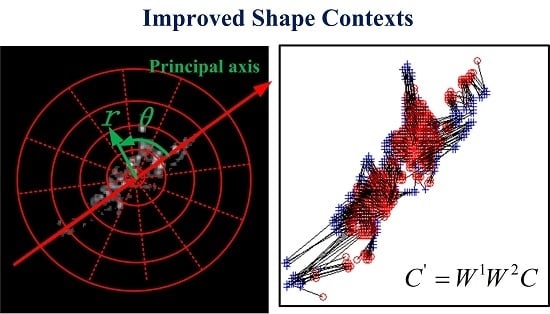
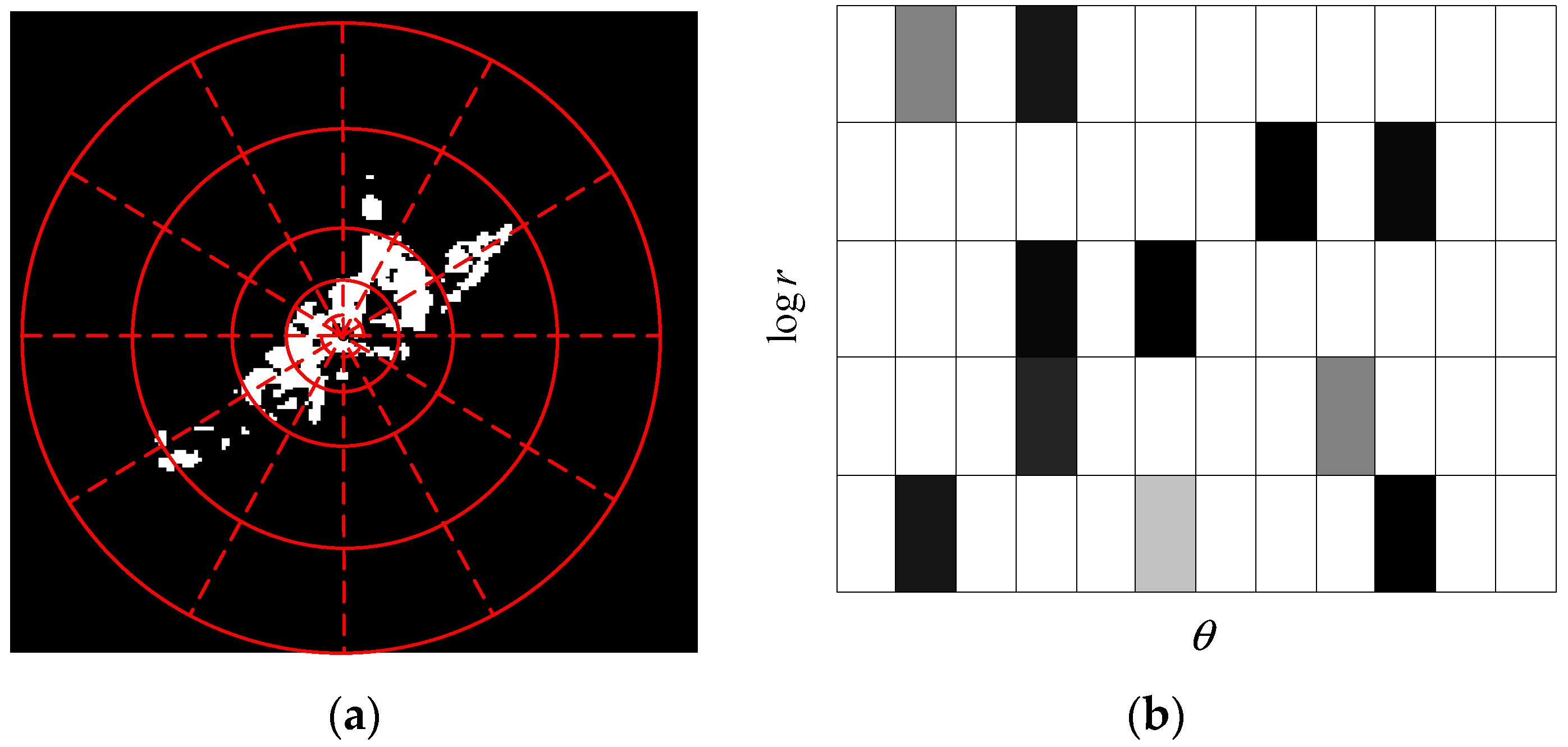
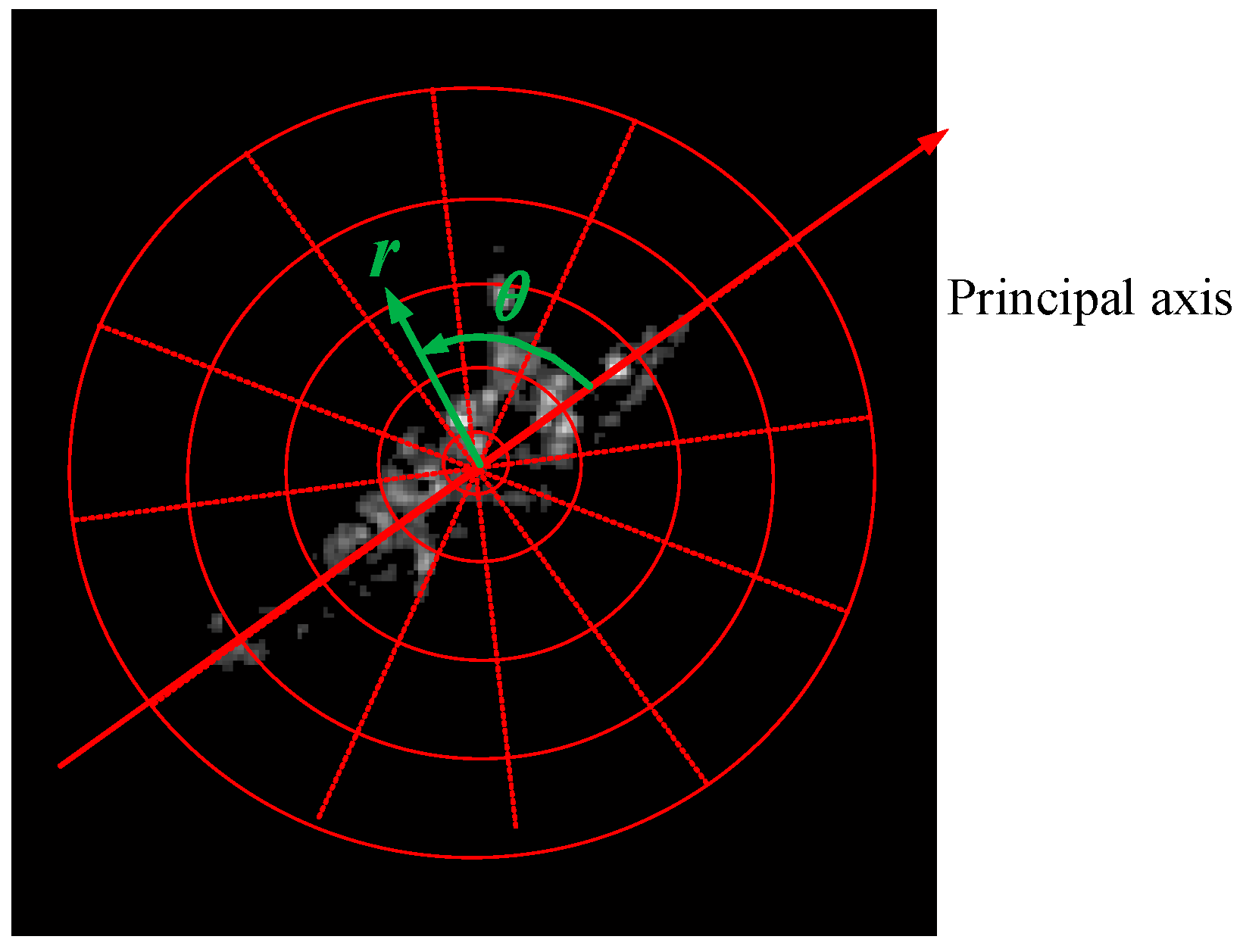
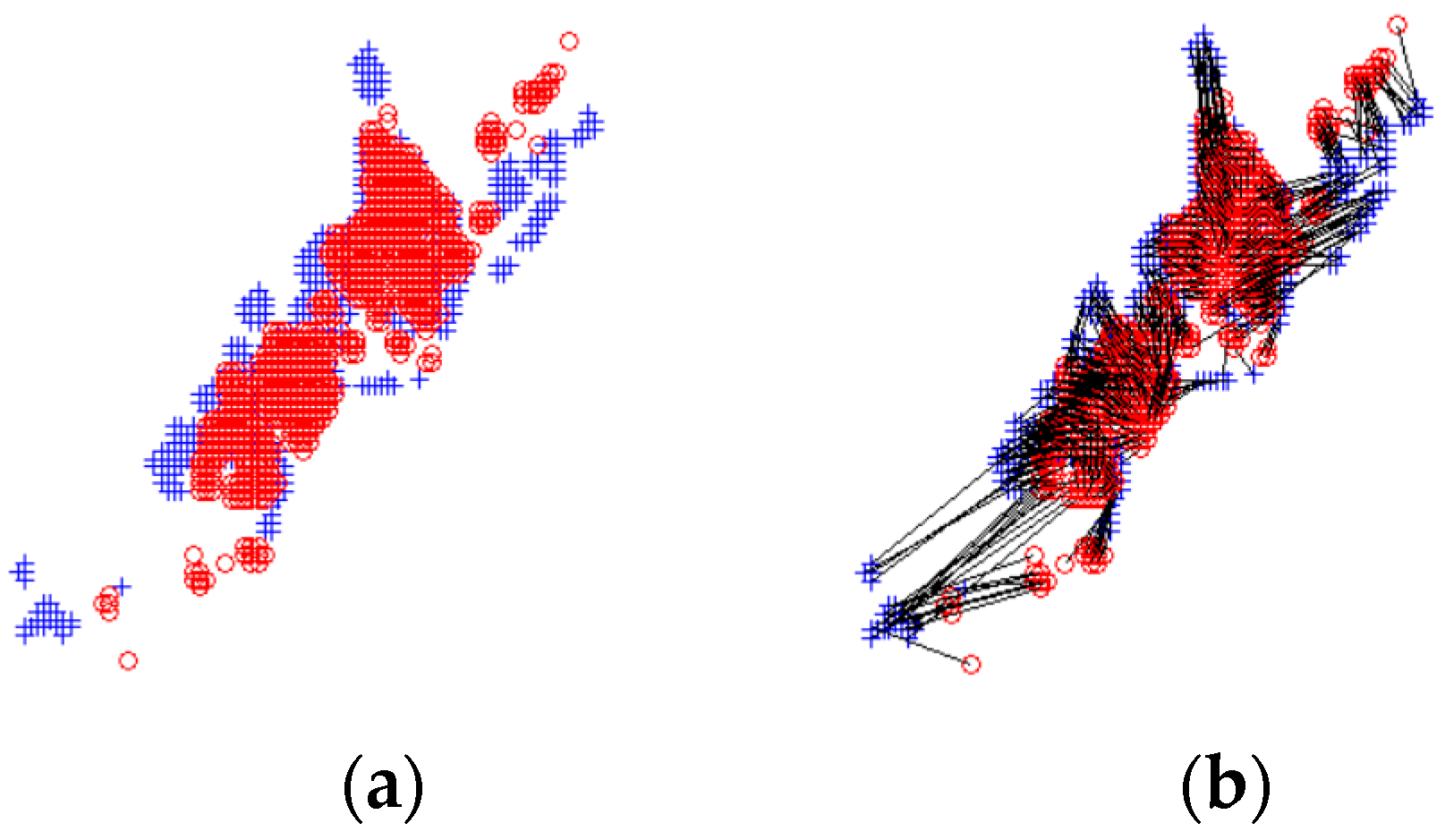
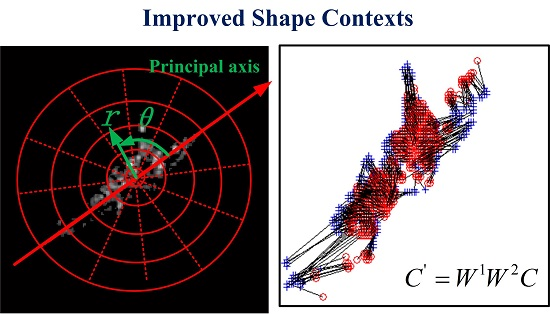
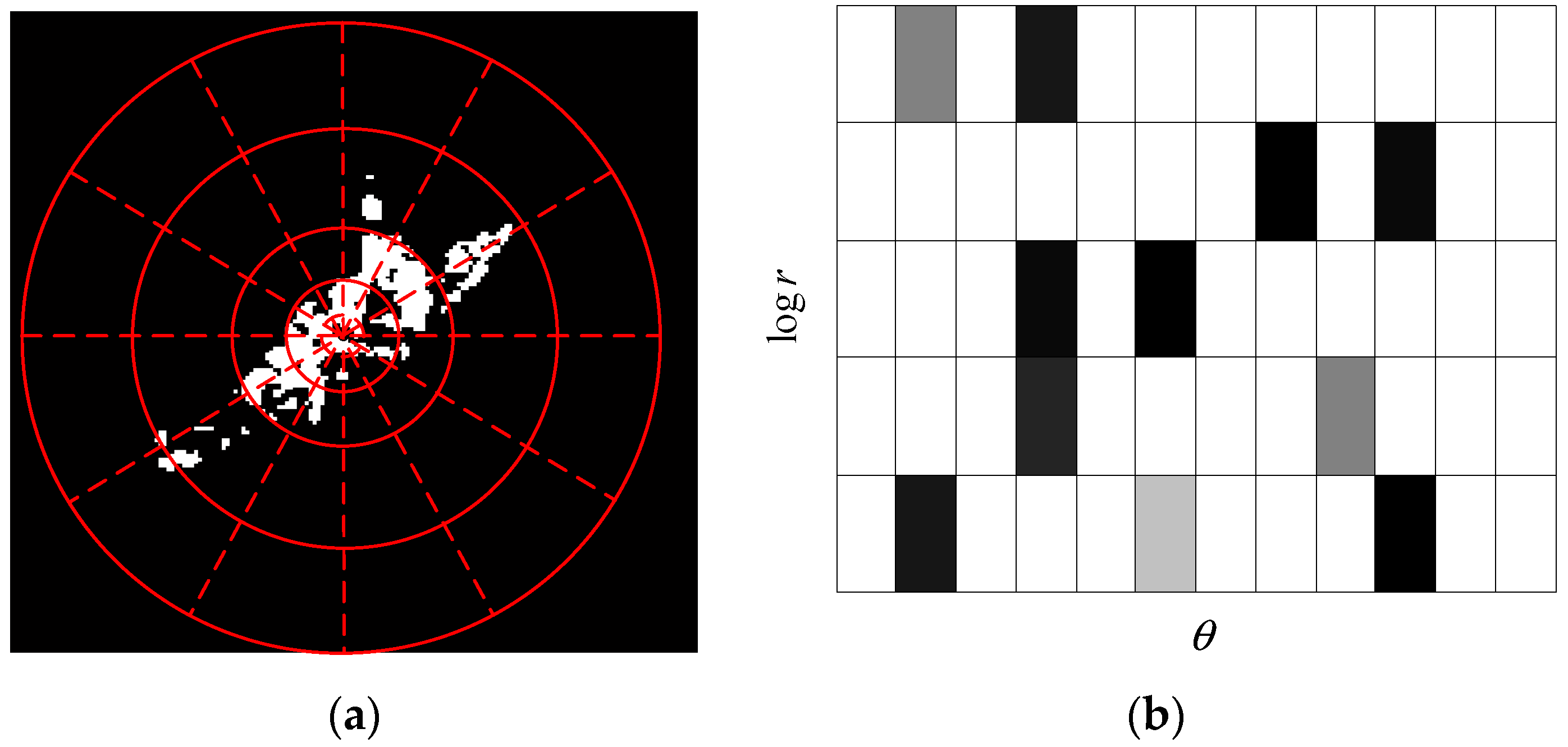
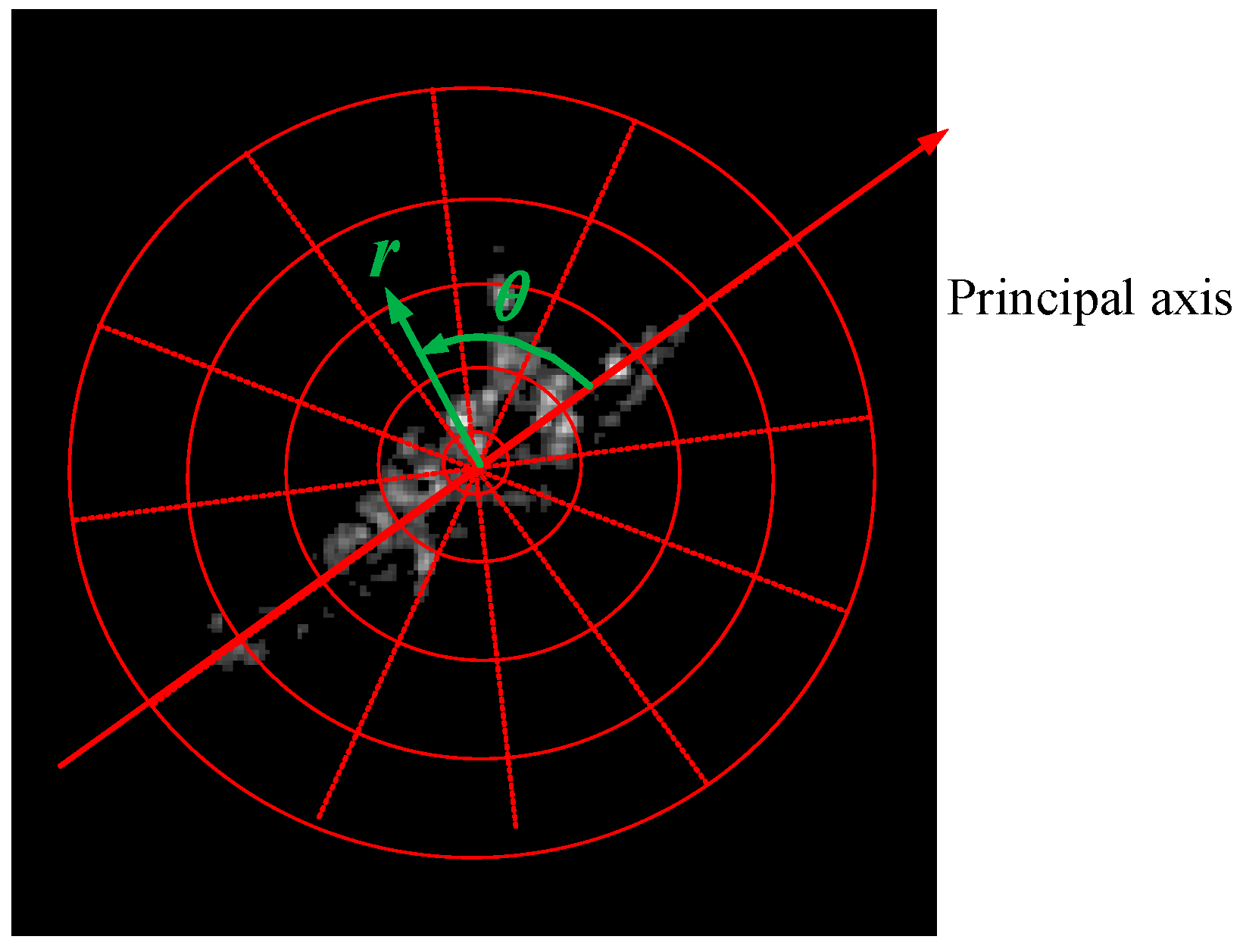
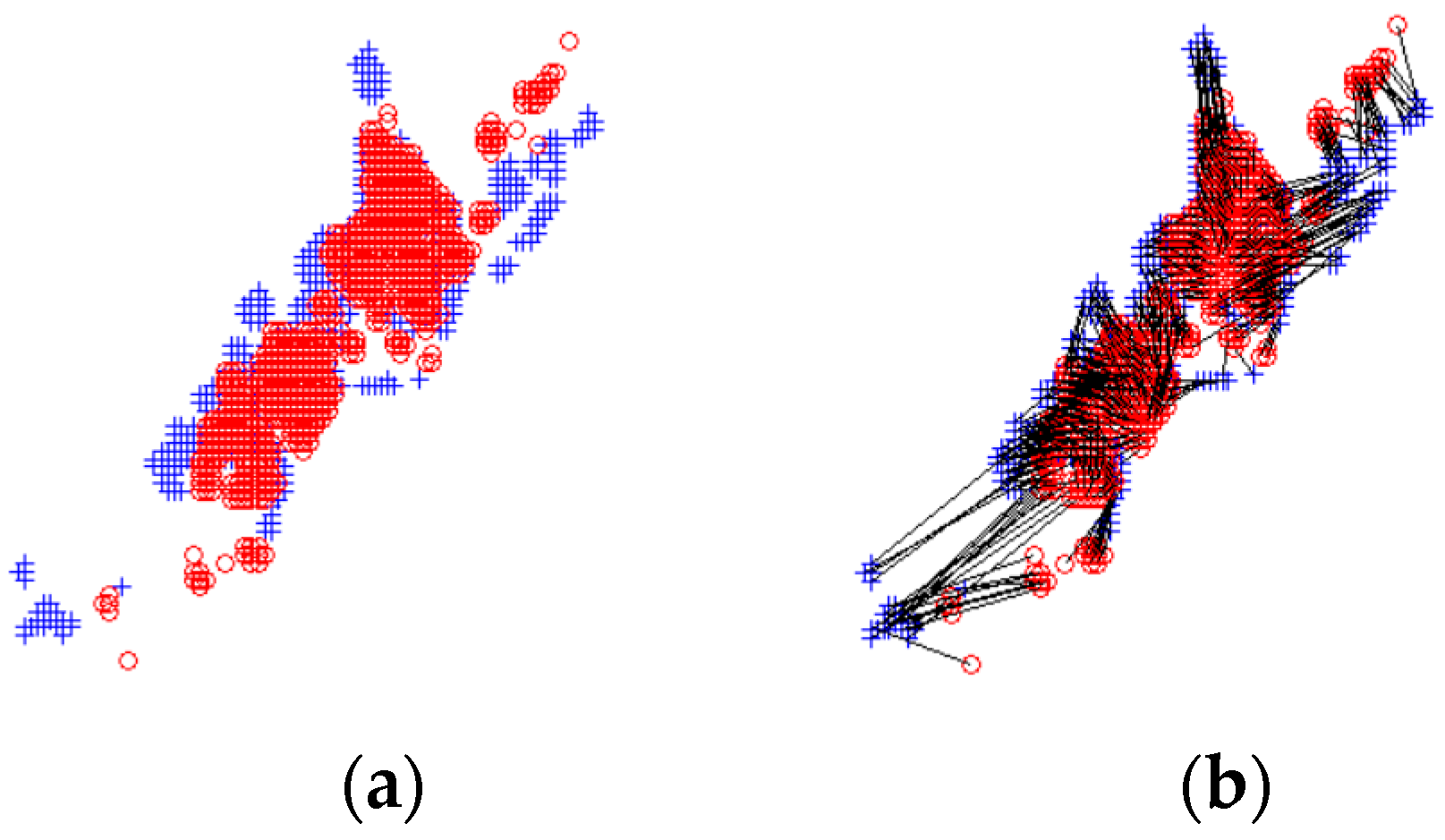
2.2.2. The Improved Shape Contexts Method
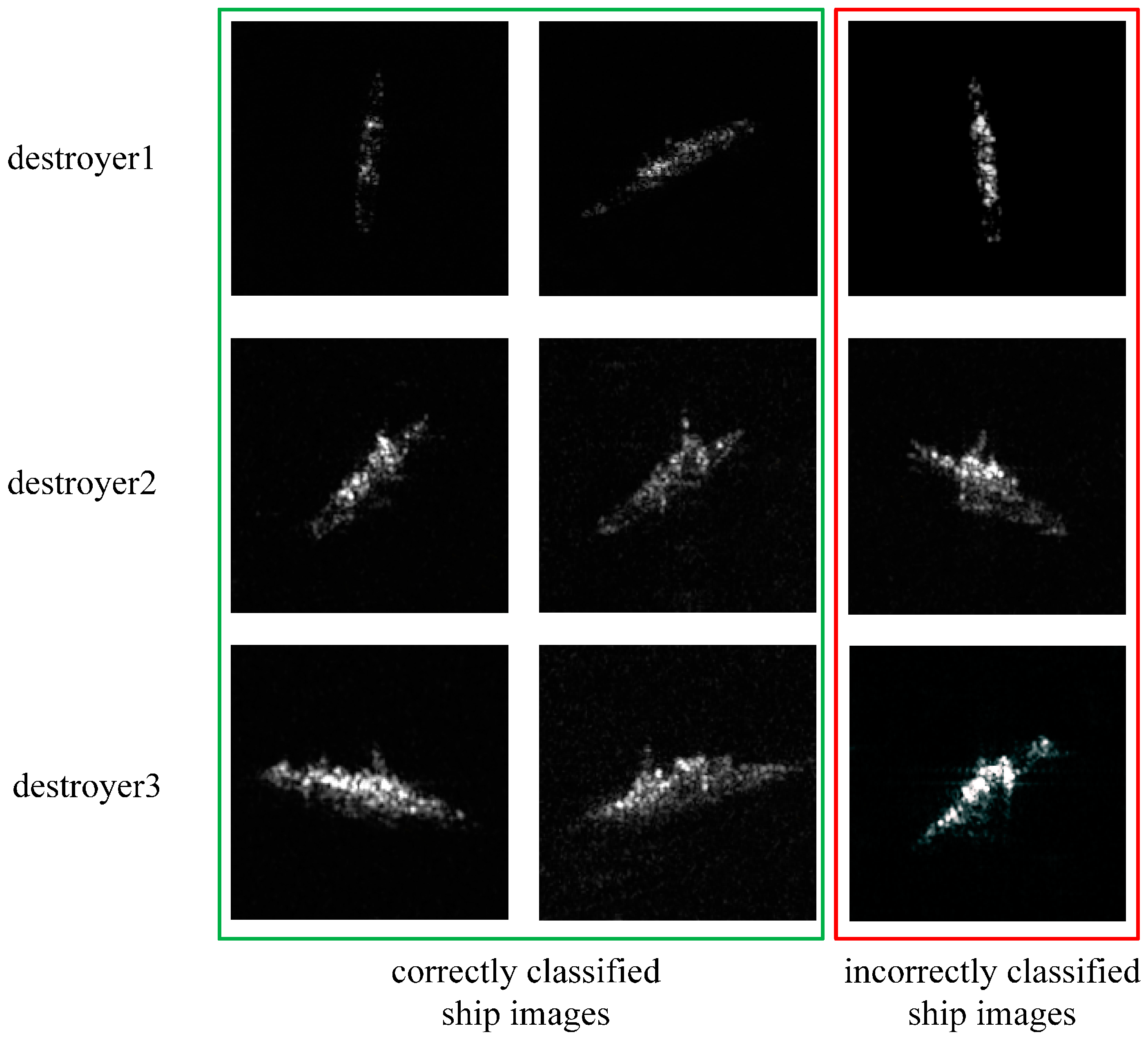
3. Experimental Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Eldhuset, K. An automatic ship 472 and ship wake detection system for spaceborne SAR images in coastal regions. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1010–1019. [Google Scholar] [CrossRef]
- Crisp, D.J. The State-of-the-Art in Ship Detection in Synthetic Aperture Radar Imagery. Available online: http://www.dsto.defence.gov.au/publications/2660/ (accessed on 5 February 2004).
- Wang, C.; Liao, M.; Li, X. Ship detection in SAR images based on the Alpha-stable distribution. Sensors 2008, 8, 4948–4960. [Google Scholar] [CrossRef] [PubMed]
- Wackerman, C.C.; Friedman, W.G.; Pichel, W.G.; Clemente-Colon, P.; Li, X. Automatic detection of ships in RADARSAT-1 SAR imagery. Can. Remote Sens. 2001, 27, 568–577. [Google Scholar] [CrossRef]
- Nunziata, F.; Migliaccio, M.; Brown, C.E. Reflection symmetry for polarimetric observation of man-made metallic targets at sea. IEEE J. Ocean. Eng. 2012, 37, 384–394. [Google Scholar] [CrossRef]
- Marino, A. A notch filter for ship detection with polarimetric SAR data. IEEE J. Sel. Top. Appl. Eearth Obs. Remote Sens. 2013, 6, 1219–1232. [Google Scholar] [CrossRef]
- Anfinsen, S.N.; Brekke, C. Statistical models for constant false alarm rate ship detection with the sublook correlation magnitude. IEEE Trans. Geosci. Remote Sens. 2012, 53, 5626–5629. [Google Scholar]
- Marino, A.; Sanjuan-Ferrer, M.J.; Ouchi, K. Ship detection with spectral analysis of Synthetic Aperture Radar: A comparison of new and well-known algorithms. Remote Sens. 2015, 7, 5416–5439. [Google Scholar] [CrossRef]
- Margarit, G.; Mallorqui, J.J.; Rius, J.M.; Sanz-Marcos, J. On the usage of GRECOSAR, an orbital polarimetric SAR simulator of complex targets, for vessel classification studies. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3517–3526. [Google Scholar] [CrossRef]
- Osman, H.; Pan, L.; Blostein, S.D.; Gagnon, L. Classification of ships in airborne SAR imagery using back propagation neural networks. Proc. SPIE 1997, 1997, 126–136. [Google Scholar]
- Gouaillier, V.; Gagnon, L. Ship silhouette recognition using principal components analysis. Proc. SPIE 1997, 1997, 59–69. [Google Scholar]
- Margarit, G.; Tabasco, A. Ship classification in single-Pol SAR images based on fuzzy logic. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3129–3138. [Google Scholar] [CrossRef]
- Touzi, R.; Raney, R.K.; Charbonneau, F. On the use of permanent symmetric scatters for ship characterization. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2039–2045. [Google Scholar] [CrossRef]
- Margarit, G.; Jordi, J.M.; Fabregas, X. Single-pass polarimetric SAR interferometry for vessel classification, IEEE Trans. Geosci. Remote Sens. 2007, 45, 3494–3502. [Google Scholar] [CrossRef]
- Xing, X.; Ji, K.; Zou, H.; Chen, W.; Sun, J. Ship classification in TerraSAR-X images with feature space based sparse representation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1562–1566. [Google Scholar] [CrossRef]
- Zhang, H.; Tian, X.; Wang, C.; Wu, F.; Zhang, B. Merchant vessel classification based on scattering component analysis for COSMO-SkyMed SAR images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1275–1279. [Google Scholar] [CrossRef]
- Zhou, J.; Shi, Z.; Cheng, X.; Fu, Q. Automatic target recognition of SAR images based on global scattering center model. IEEE Geosci. Remote Sens. Lett. 2011, 49, 3713–3729. [Google Scholar]
- Park, J.; Park, S.; Kim, K. New discrimination features for SAR automatic target recognition. IEEE Geosci. Remote Sens. Lett. 2013, 10, 476–480. [Google Scholar] [CrossRef]
- Park, J.; Kim, K. Modified polar mapping classifier for SAR automatic target recognition. IEEE Geosci. Remote Sens. Lett. 2014, 36, 1092–1106. [Google Scholar] [CrossRef]
- Amoon, M.; Rezai, G. Automatic target recognition of Synthetic Aperture Radar (SAR) images based on optimal selection of Zernike moments features. IET Comput. Vis. 2014, 8, 77–85. [Google Scholar] [CrossRef]
- Papson, S.; Narayanan, R. Classification via the shadow Region in SAR Imagery. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 969–980. [Google Scholar] [CrossRef]
- Belongie, S.; Malik, J.; Puzicha, J. Shape matching and object recognition using shape contexts. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 509–522. [Google Scholar] [CrossRef]
- Amores, J.; Sebe, N.; Radeva, P. Context-based object-class recognition and retrieval by generalized correlograms. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1818–1833. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Thompson, P.M.; Zubicaray, G.I.; Rose, S.E.; Tu, Z.; Dinov, I.; Toga, A.W. Direct mapping of hippocampal surfaces with intrinsic shape context. NeuroImage 2007, 37, 792–807. [Google Scholar] [CrossRef] [PubMed]
- Ji, K.; Kuang, G.; Su, Y.; Yu, W. Methods of target’s peak extraction and azimuth estimation from SAR imagery. J. Astronaut. 2004, 25, 102–108. [Google Scholar]
- Jones, G.; Bhanu, B. Recognizing of articulated objects in SAR images. Pattern Recognition 2001, 34, 469–485. [Google Scholar]
- Papadimitriou, C.; Stieglitz, K. Combinatorial Optimization: Algorithms and Complexity; Courier Corporation: North Chelmsford, MA, USA, 1982. [Google Scholar]
- Hu, M.K. Visual pattern recognition by moment invariants. IEEE Trans. Inf. Theory 1962, 8, 179–187. [Google Scholar]
- Liao, S.X.; Pawlak, M. On the accuracy of Zernike moments for image analysis. IEEE Trans. Pattern Anal. Mach. Intell. 1988, 20, 1358–1364. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hu Moments | Zernike Moments | f Feature | OSC | ISC | |
|---|---|---|---|---|---|
| Destoryer1 Classification Accuracy | 70% | 81% | 73% | 88% | 92% |
| Destoryer2 Classification Accuracy | 66% | 78% | 69% | 86% | 90% |
| Destoryer3 Classification Accuracy | 67% | 77% | 66% | 86% | 90% |
| Average Classification Accuracy | 68% | 79% | 69% | 87% | 91% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.-W.; Qiu, X.-L.; Pan, Z.-X.; Zhang, Y.-T.; Lei, B. An Improved Shape Contexts Based Ship Classification in SAR Images. Remote Sens. 2017, 9, 145. https://doi.org/10.3390/rs9020145
Zhu J-W, Qiu X-L, Pan Z-X, Zhang Y-T, Lei B. An Improved Shape Contexts Based Ship Classification in SAR Images. Remote Sensing. 2017; 9(2):145. https://doi.org/10.3390/rs9020145
Chicago/Turabian StyleZhu, Ji-Wei, Xiao-Lan Qiu, Zong-Xu Pan, Yue-Ting Zhang, and Bin Lei. 2017. "An Improved Shape Contexts Based Ship Classification in SAR Images" Remote Sensing 9, no. 2: 145. https://doi.org/10.3390/rs9020145