UAS-Based Change Detection of the Glacial and Proglacial Transition Zone at Pasterze Glacier, Austria

 , , and
, , and
Abstract
:
1. Introduction
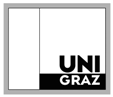
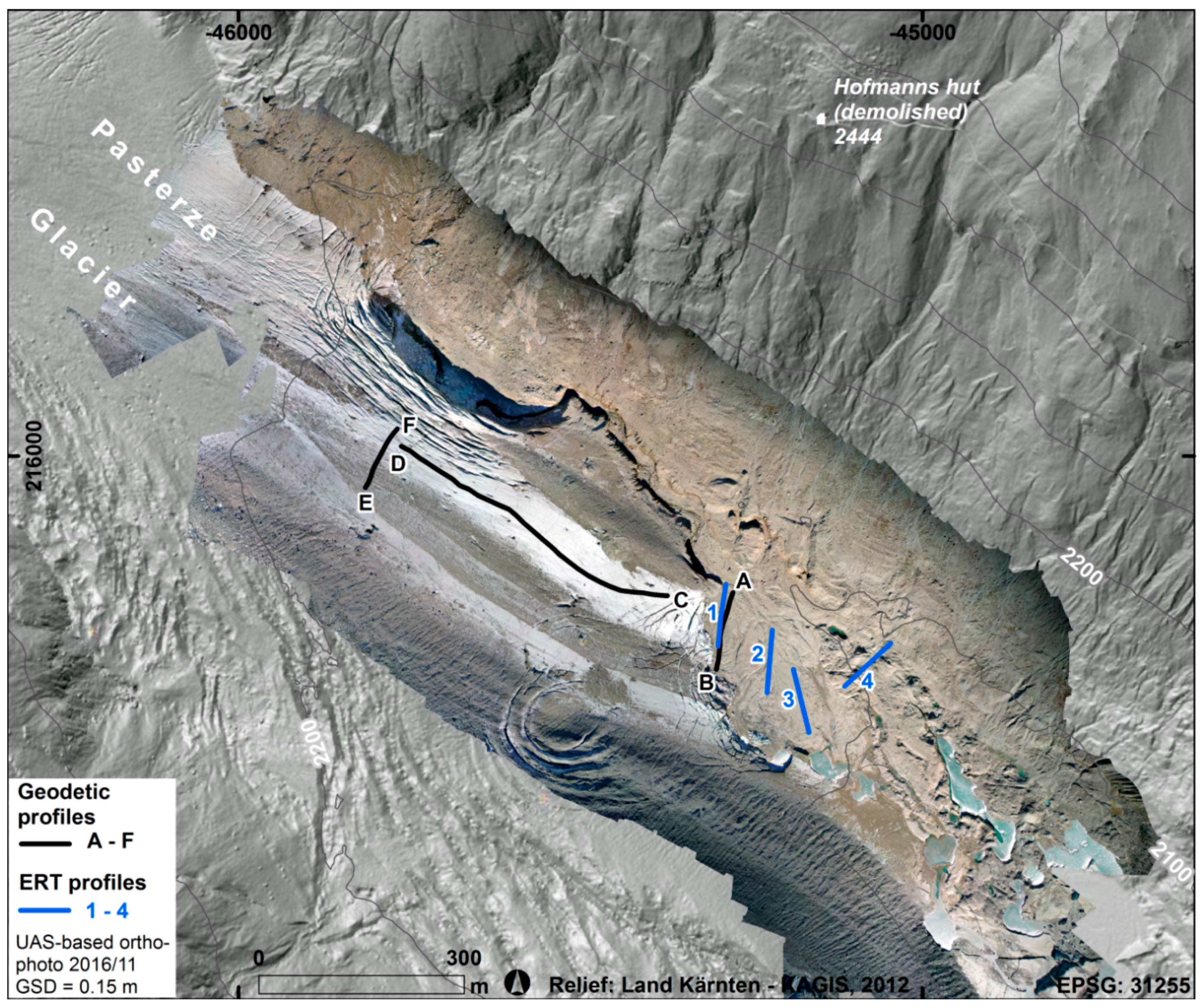
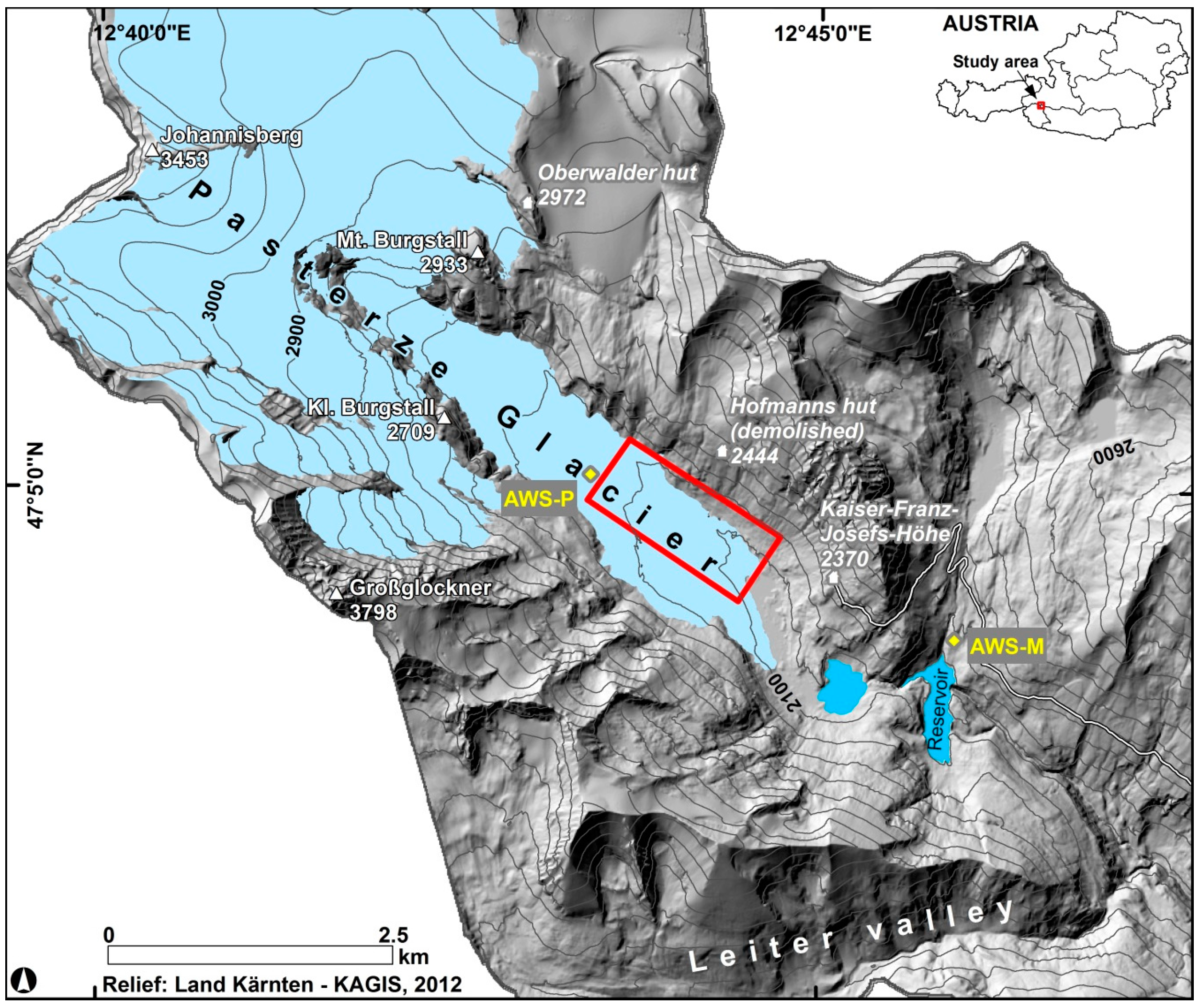
2. Study Area
3. Materials and Methods
3.1. Data Acquisition
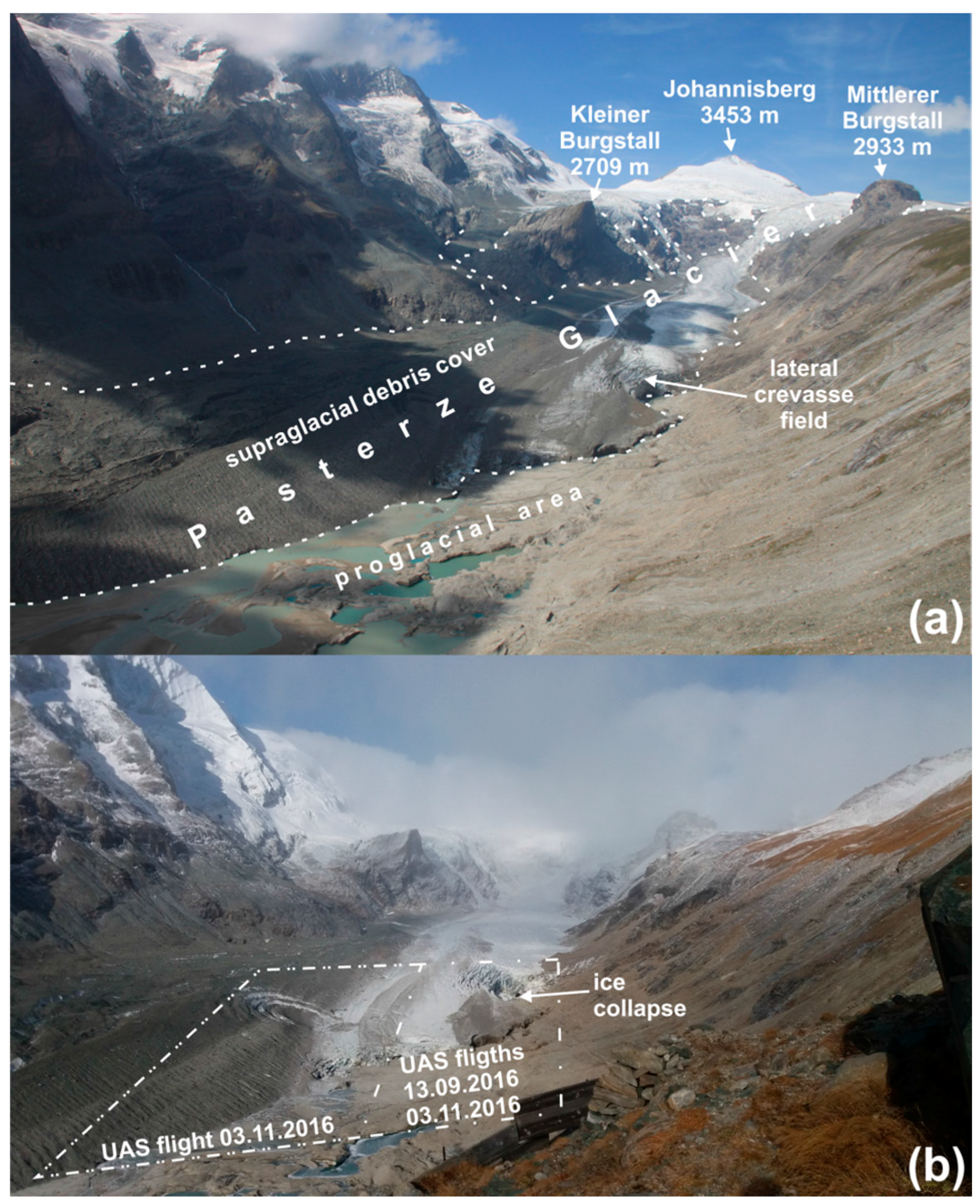
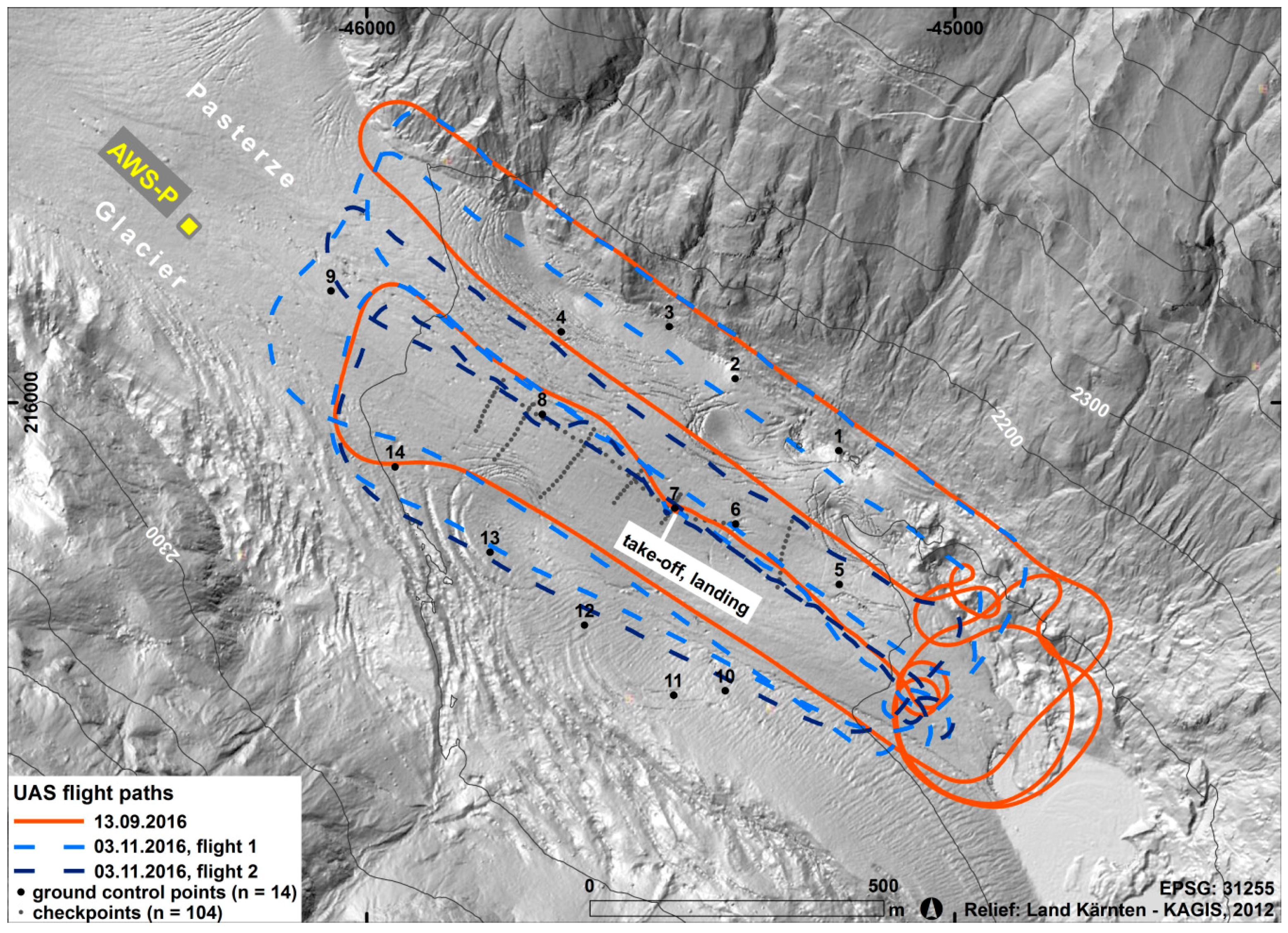
3.1.1. UAS-Based Aerial Survey
3.1.2. Geodetic Measurement
3.1.3. Electrical Resistivity Tomography
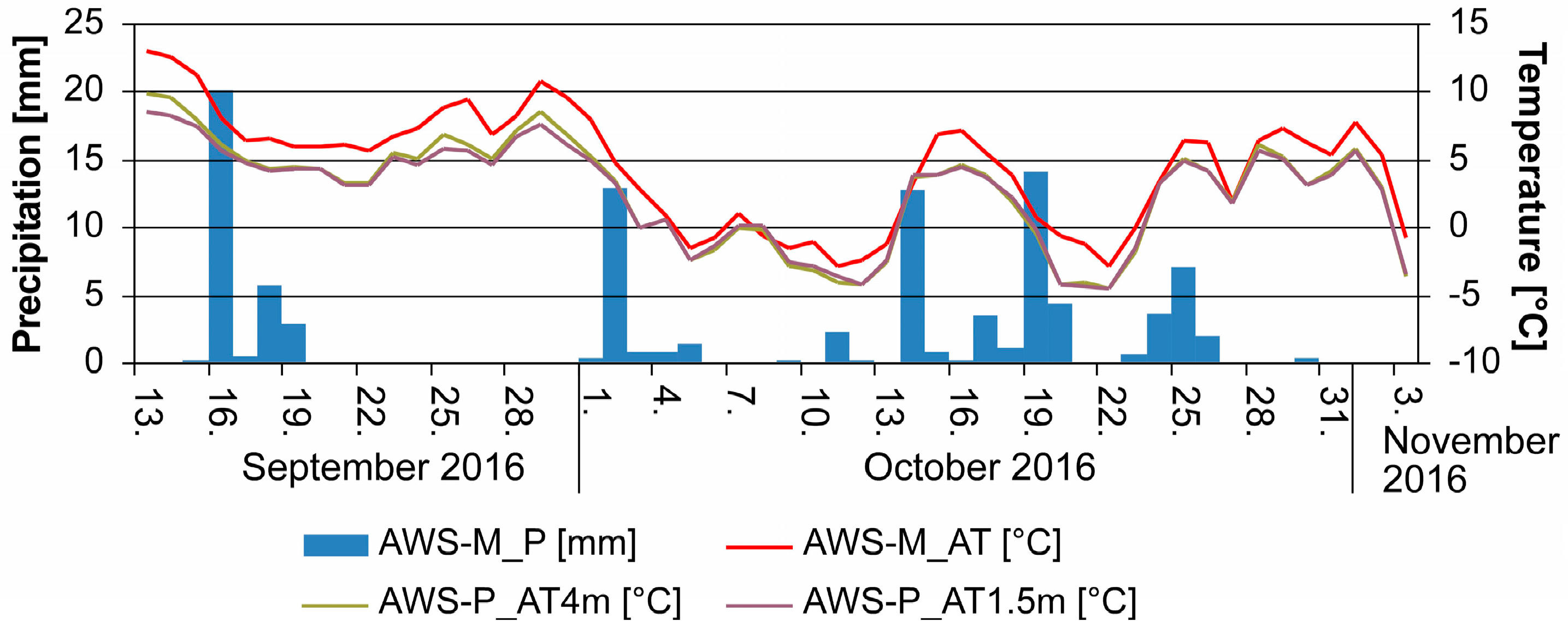
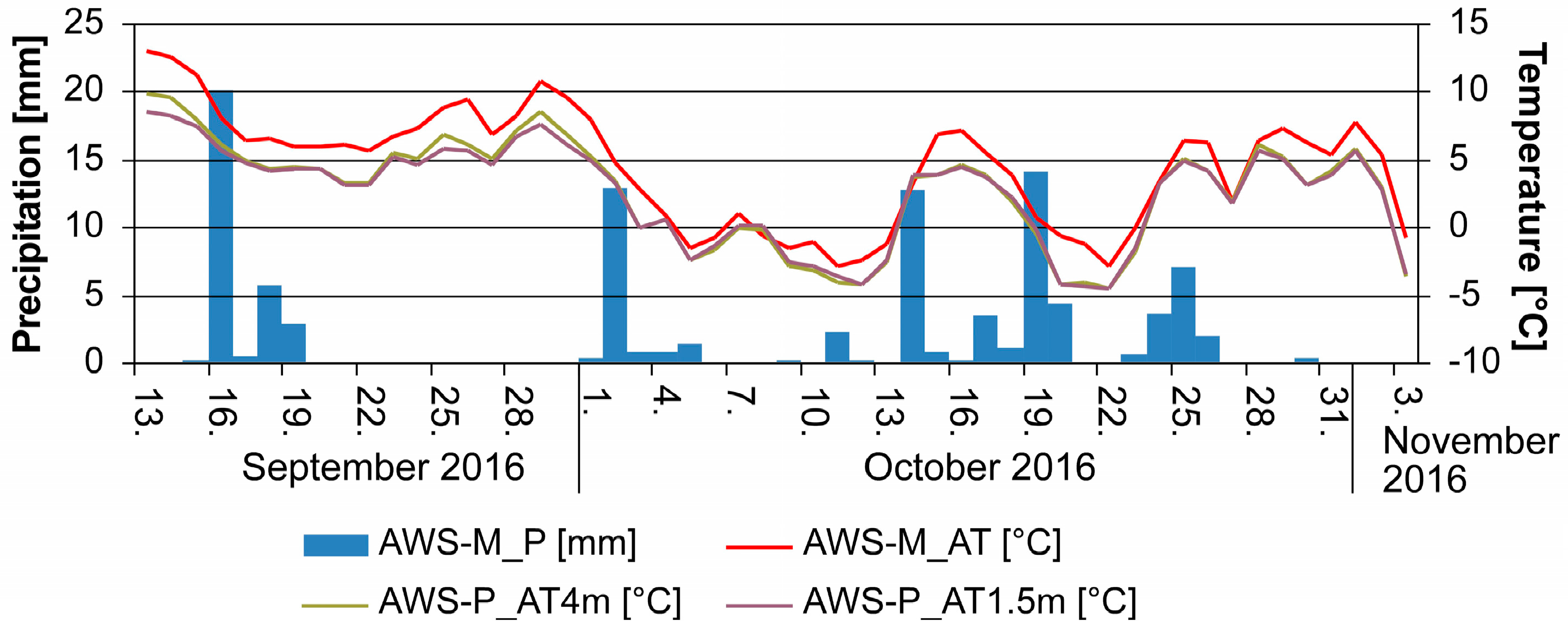
3.1.4. Meteorological Conditions and Ablation between the Two Field Campaigns
3.2. Data Processing
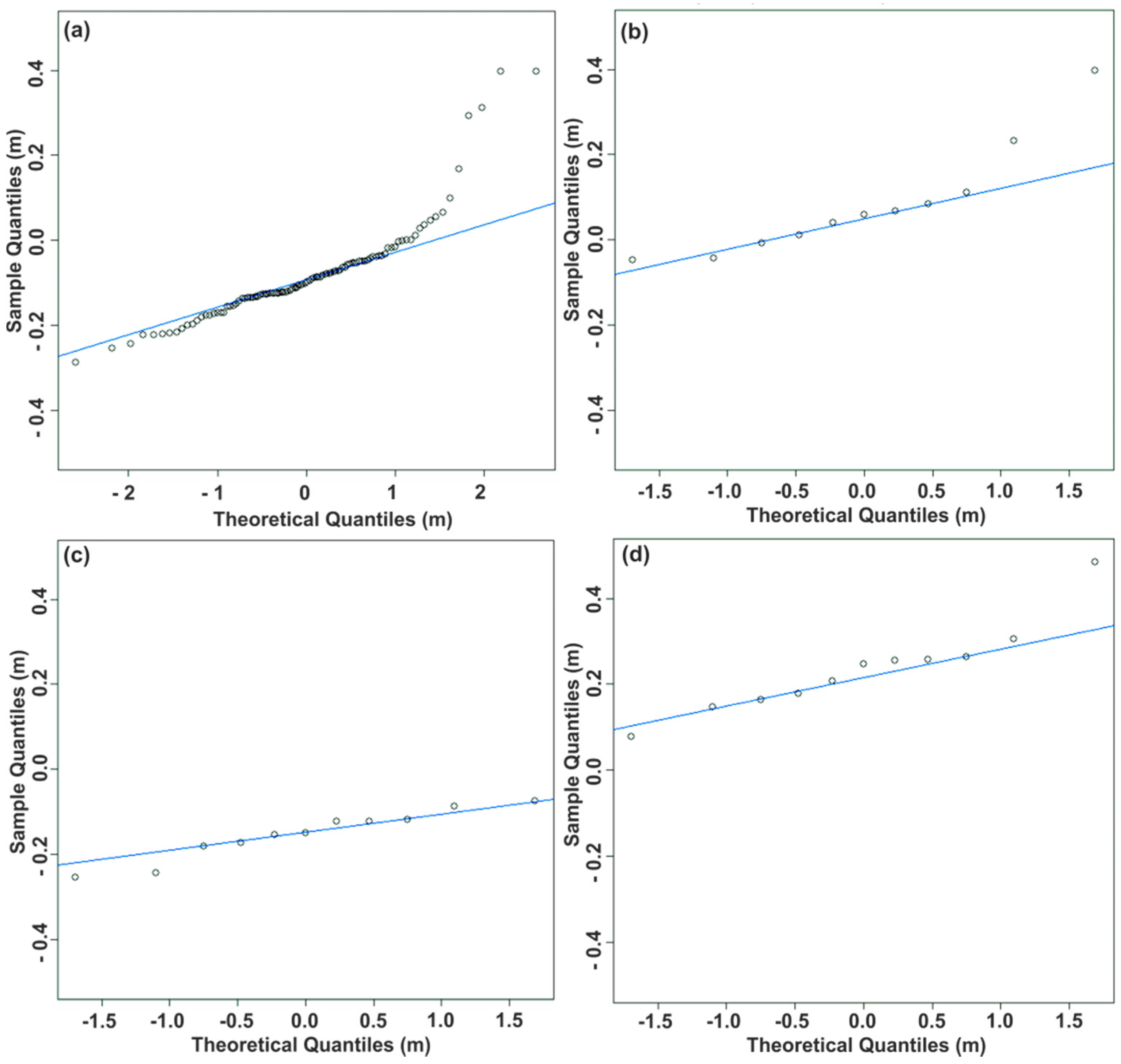
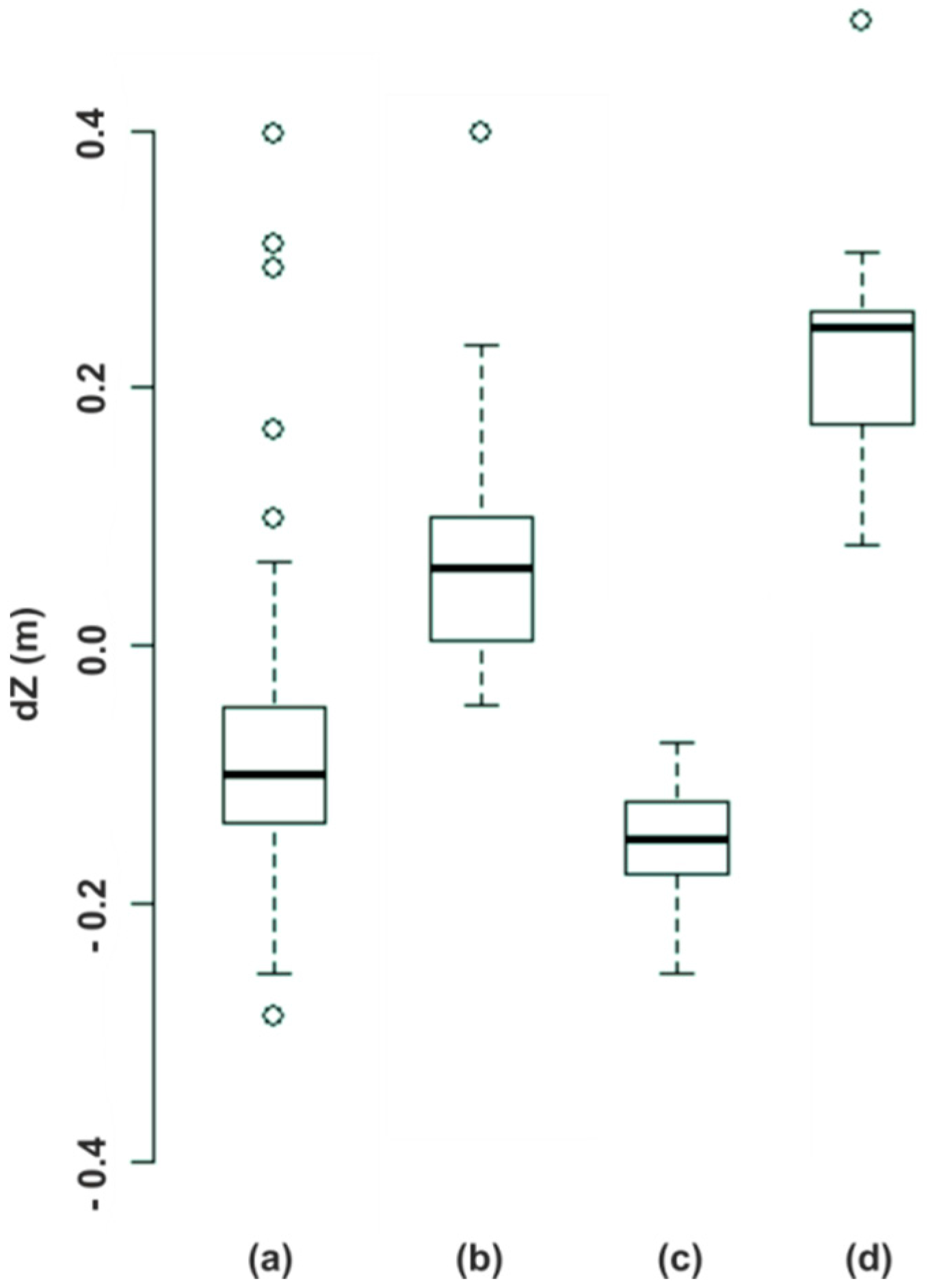
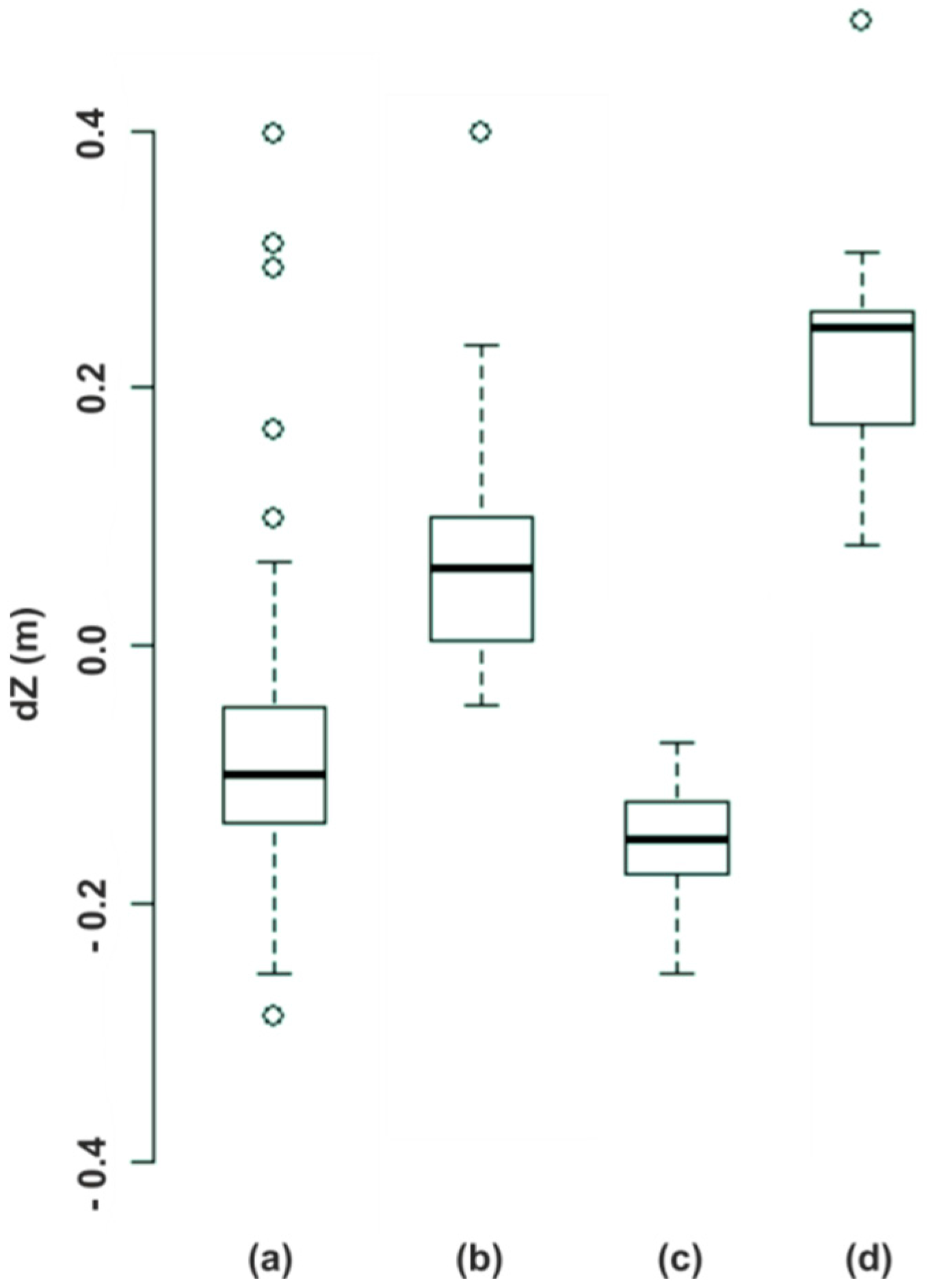
3.3. Accuracy Assessment
3.3.1. Independent Check Points
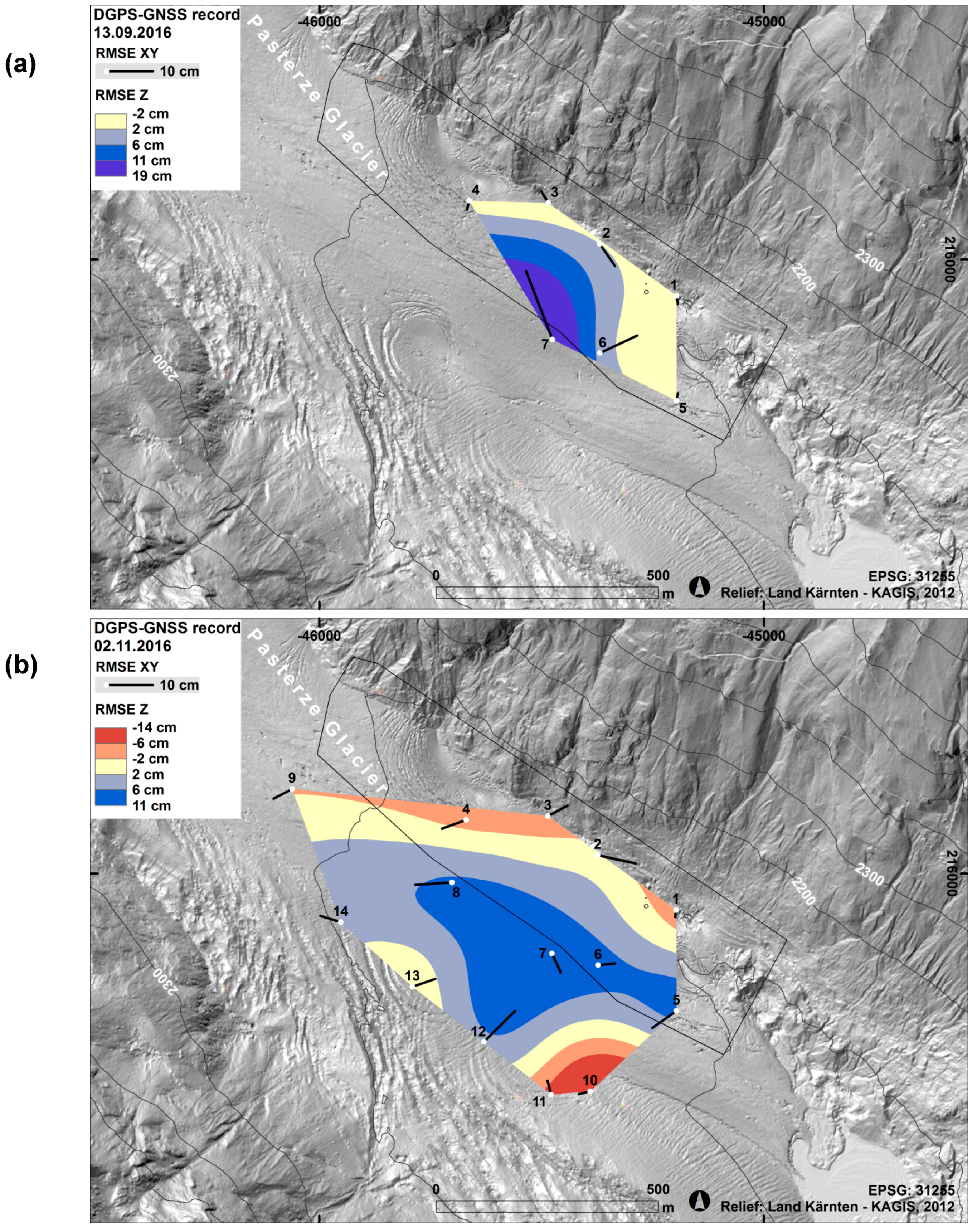
3.3.2. Root Mean Square Errors
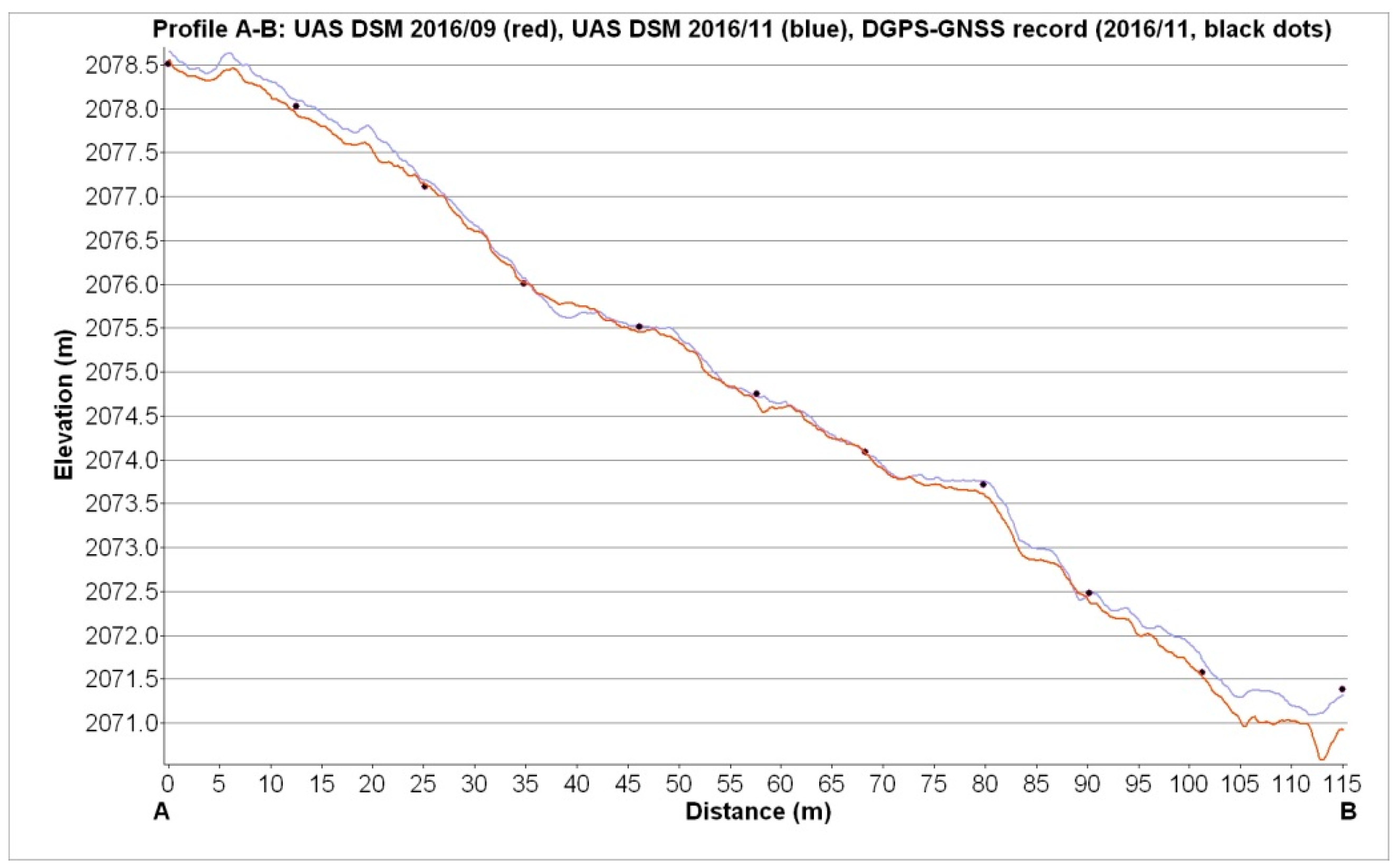
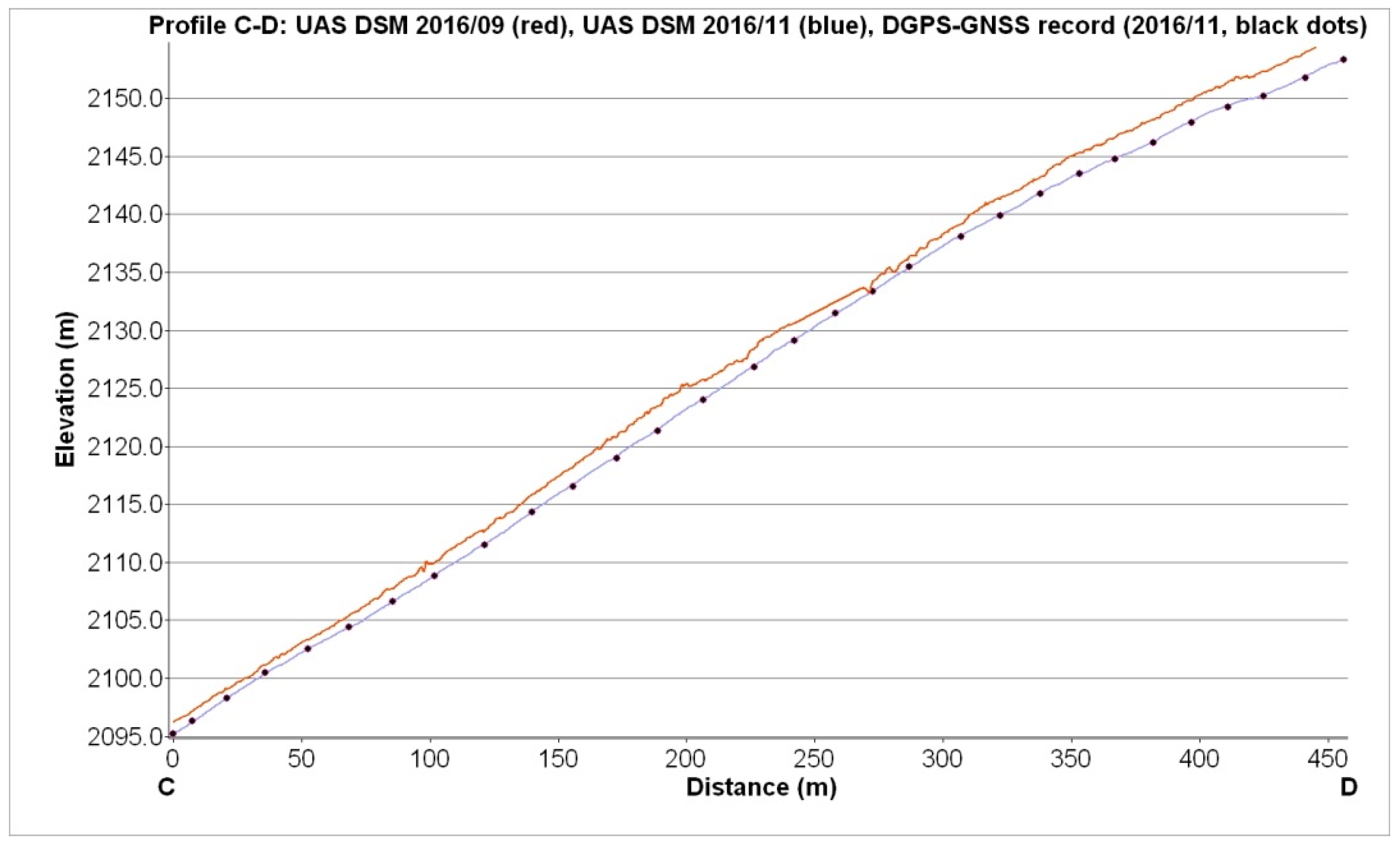
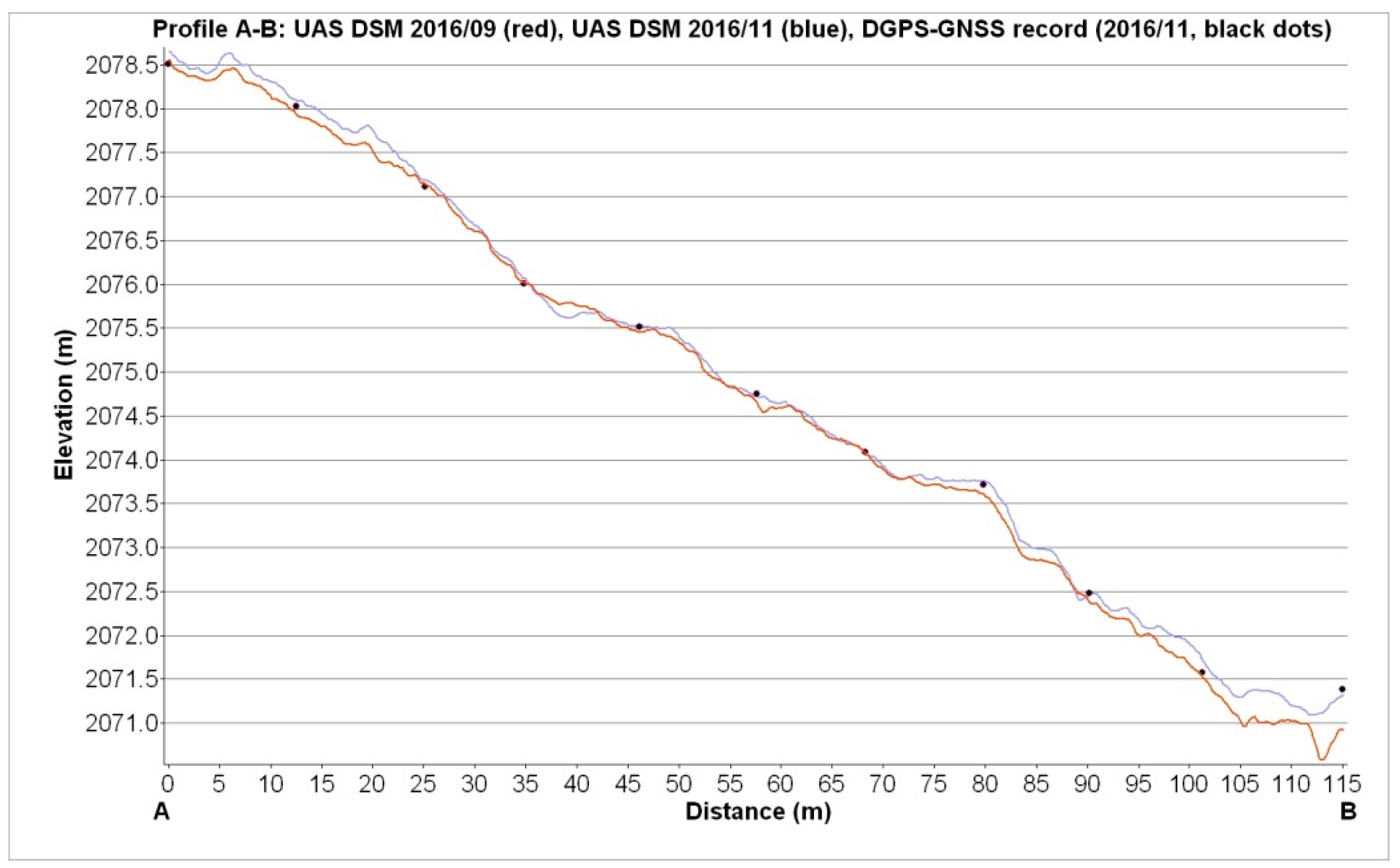
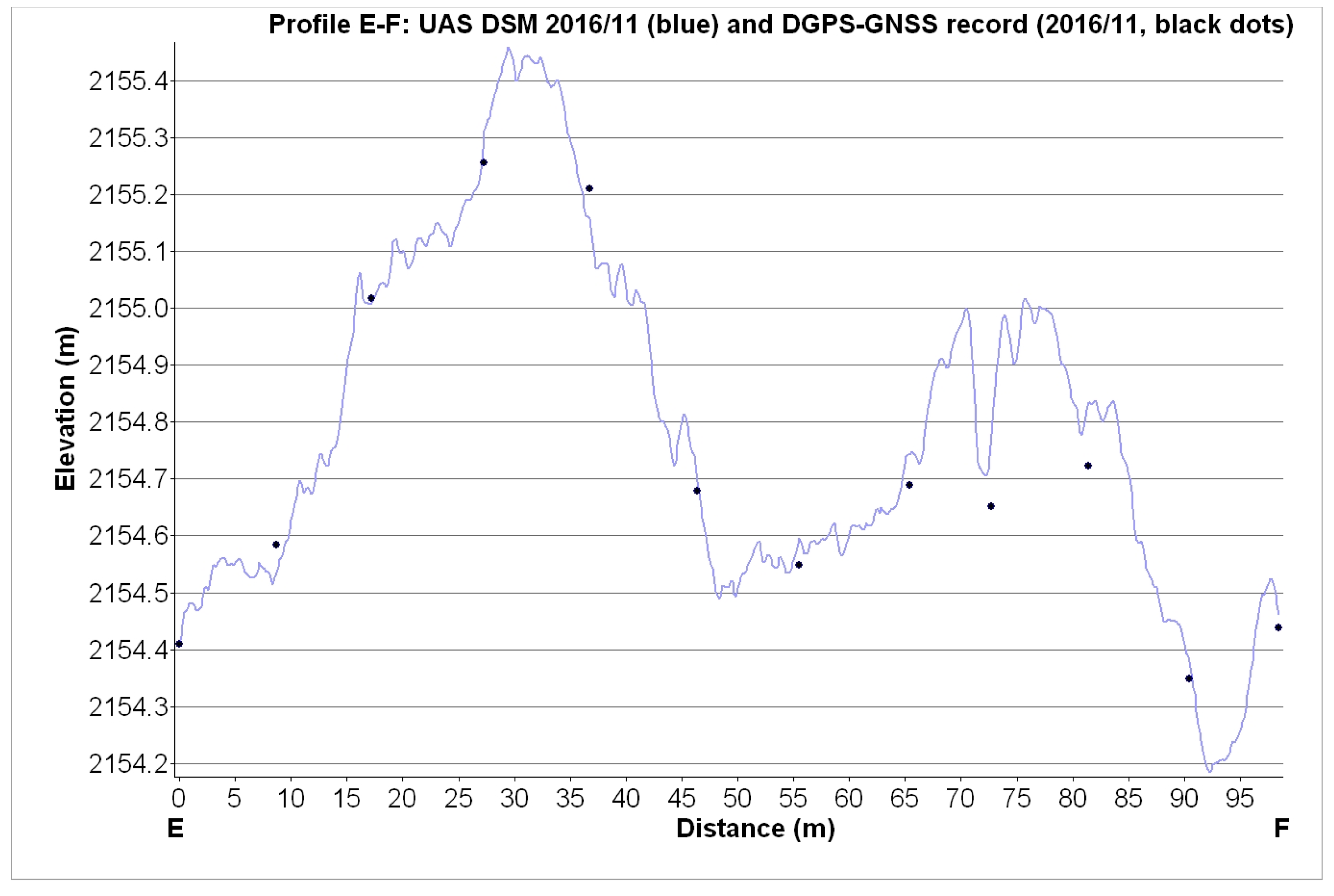
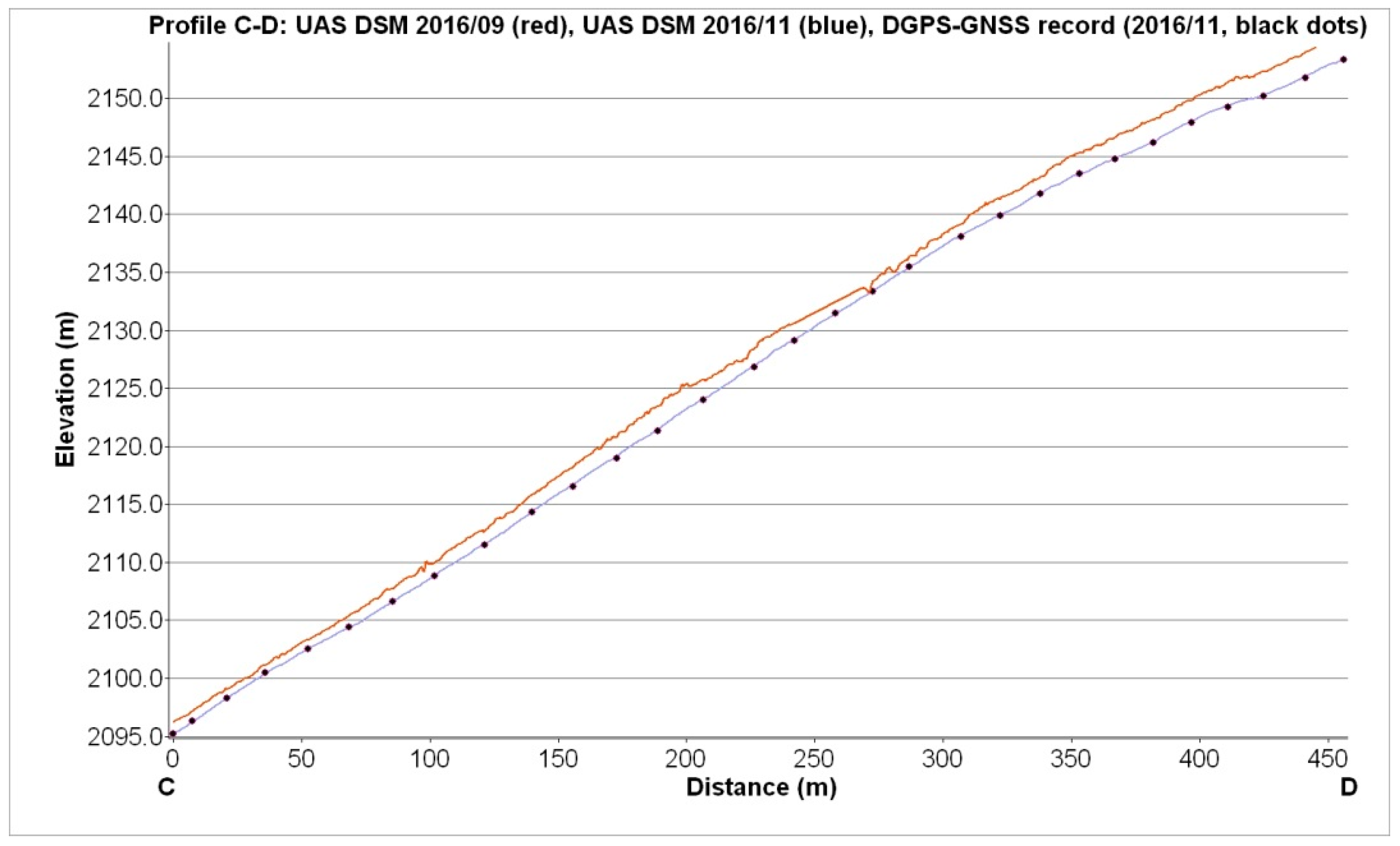
3.3.3. Geodetic Elevation Profile
3.3.4. Displacement Vectors
4. Results
4.1. Elevation Difference Based on the Geodetic Profile
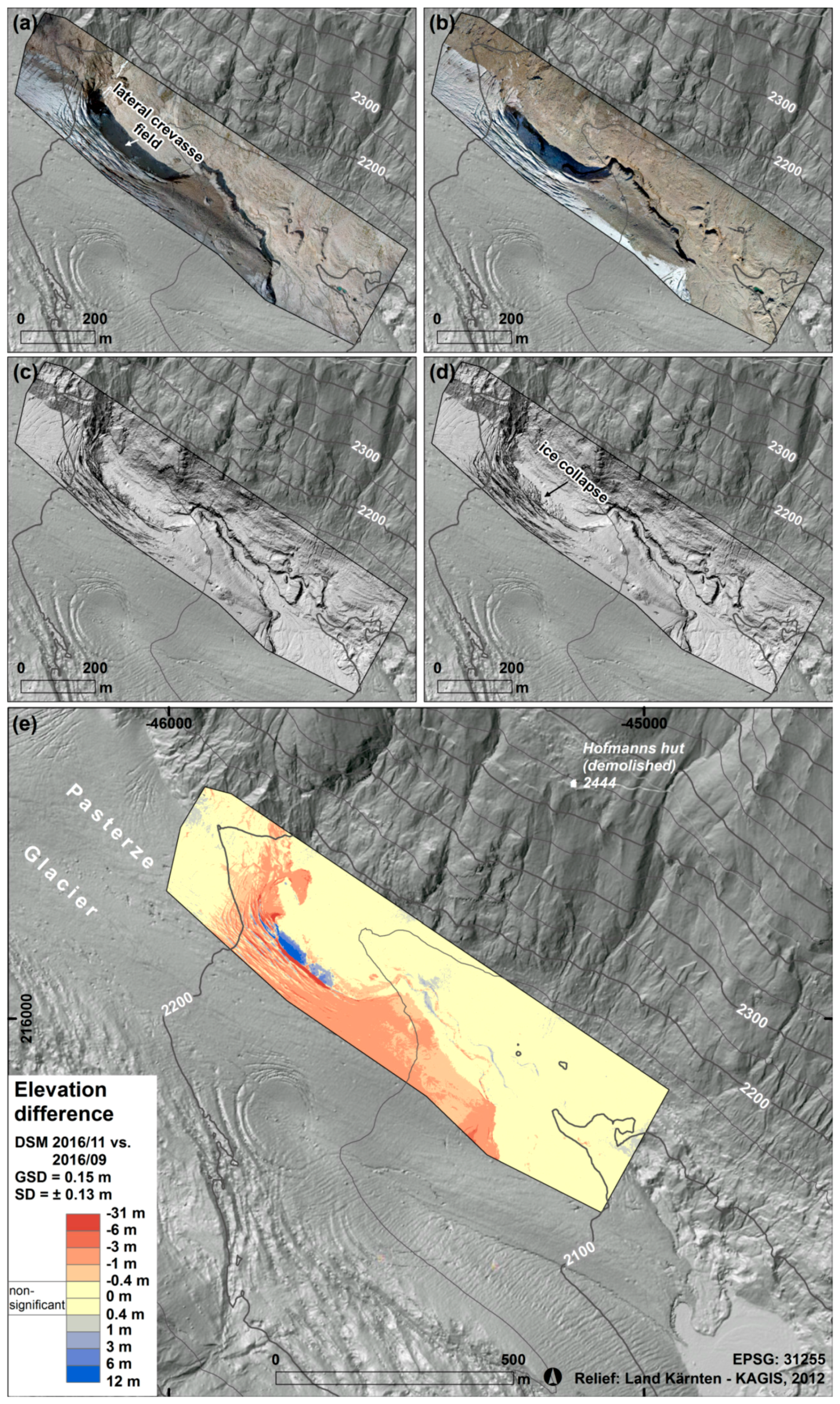
4.2. Elevation Difference Based on DEM Differencing
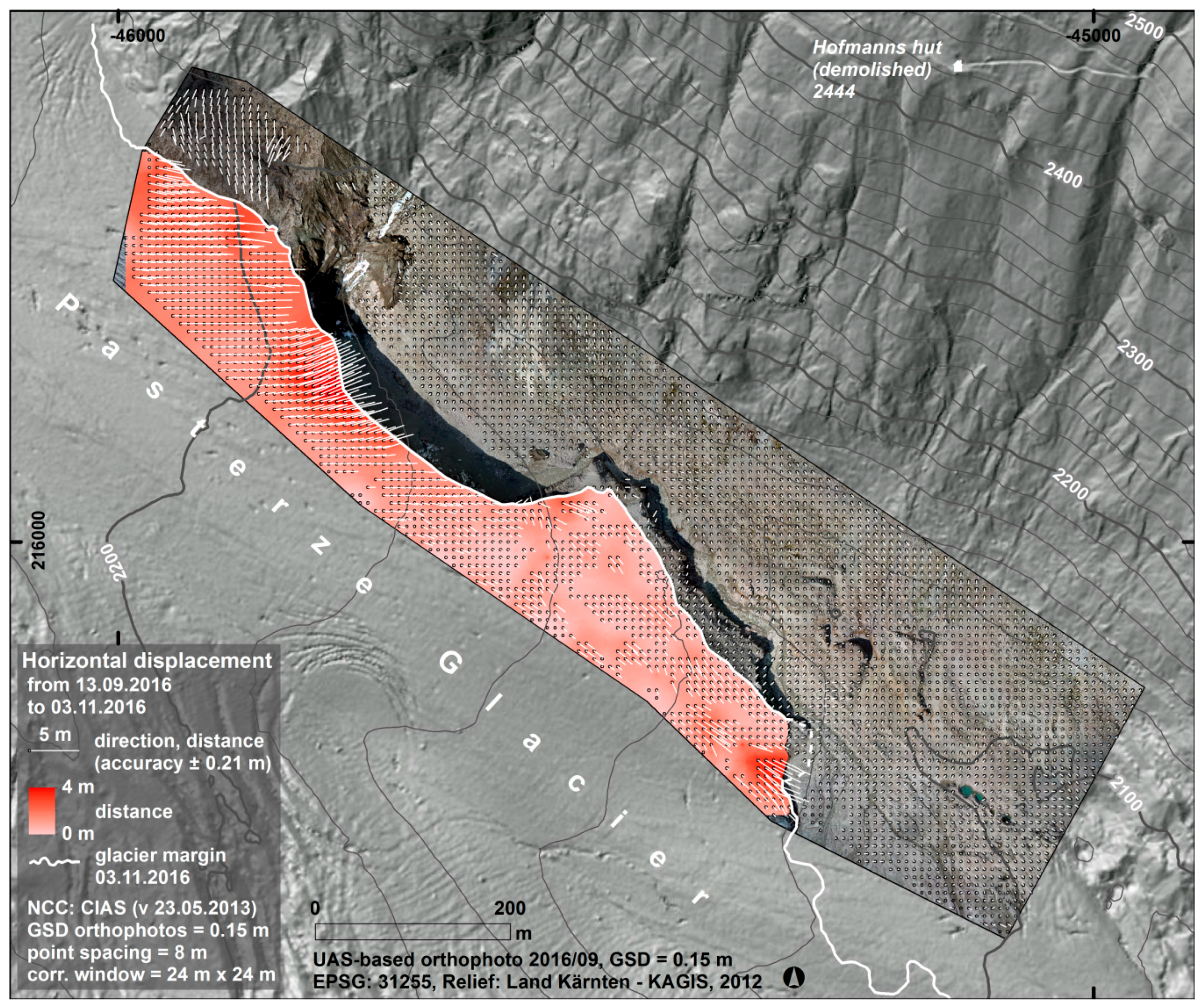
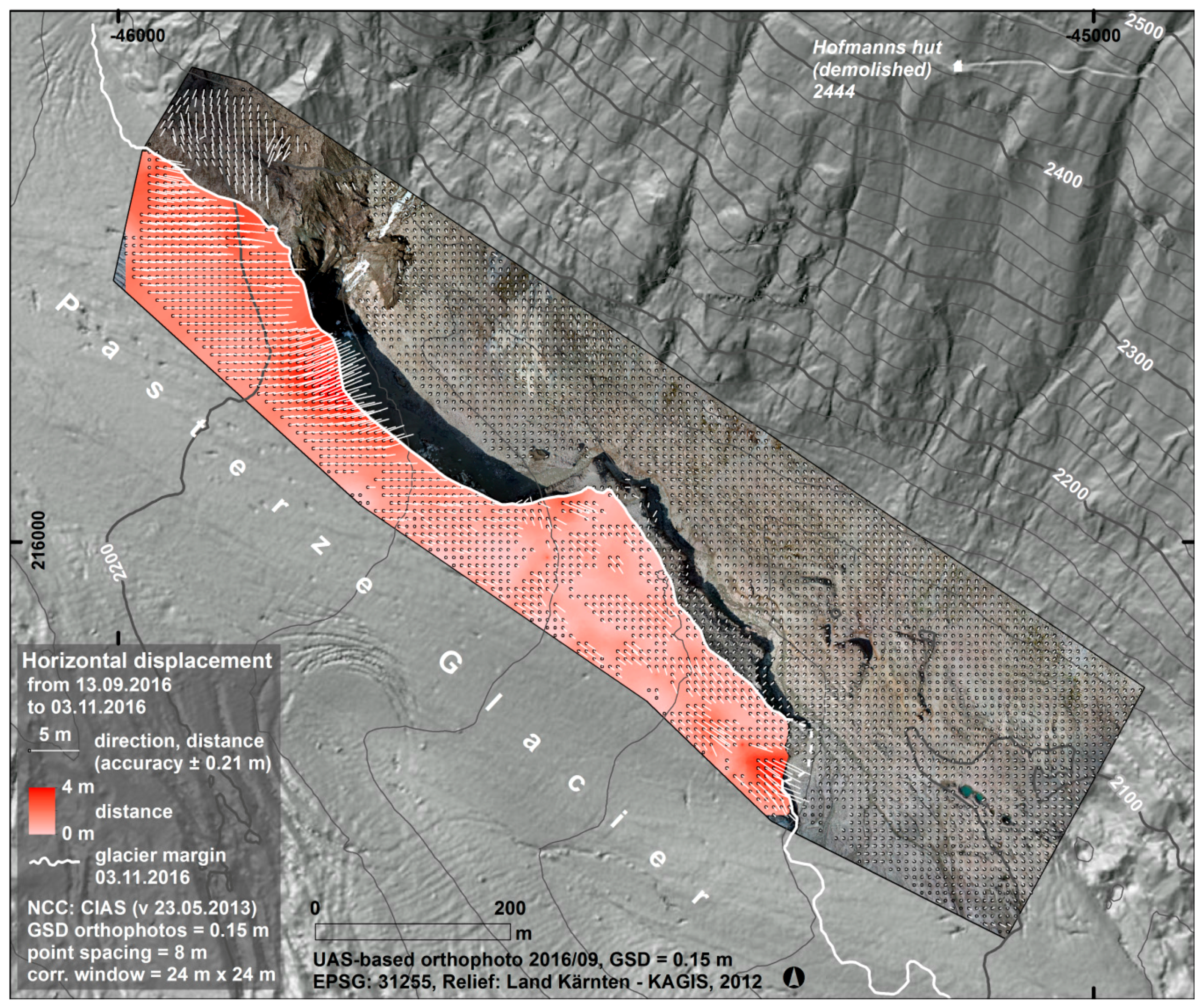
4.3. Horizontal Surface Displacement
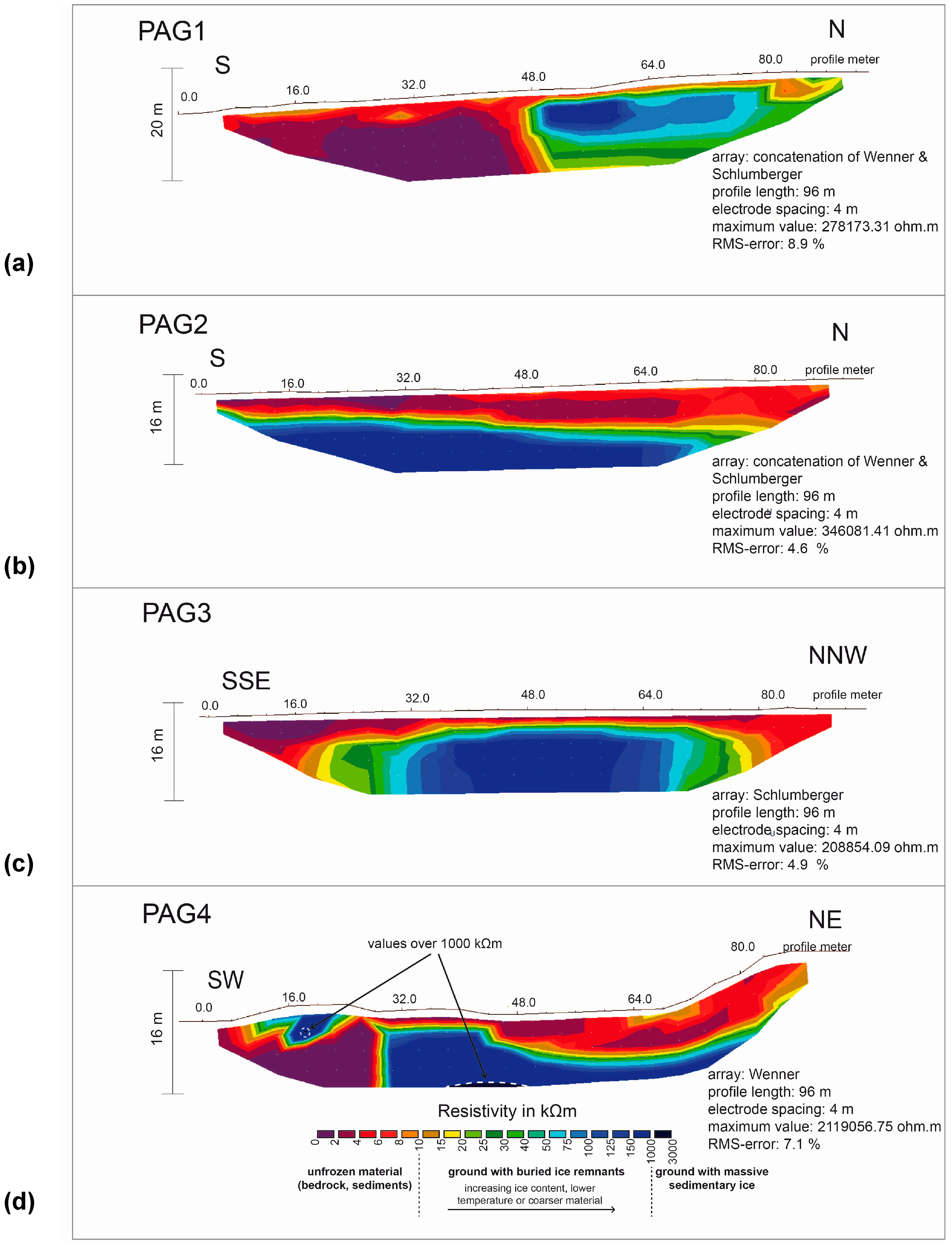
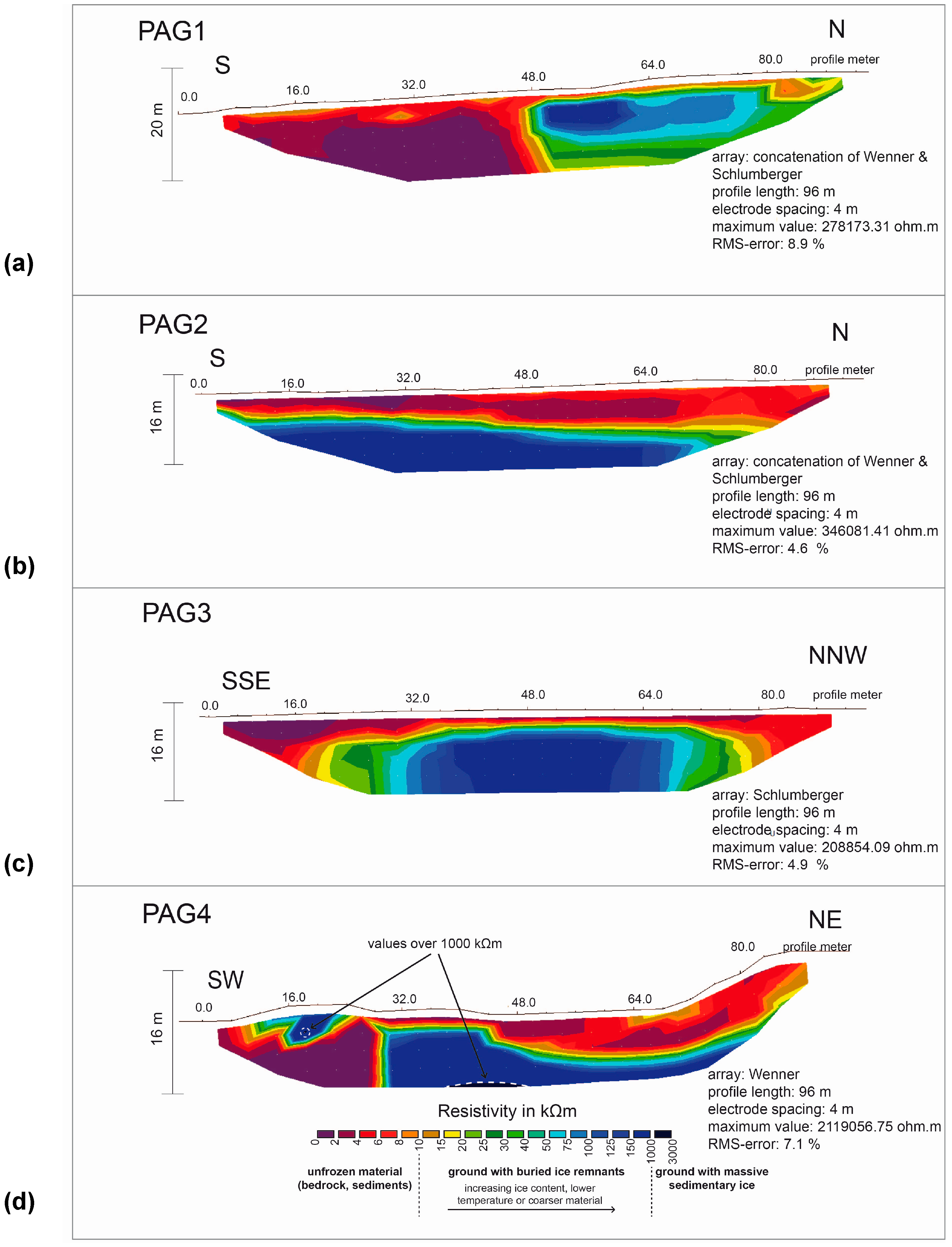
4.4. Electrical Resistivity Tomography Profiling
4.5. Meteorological Conditions and their Effect on Glacier Ice Ablation
5. Discussion
6. Conclusions
- Based on DEM differencing, we calculated a mean glacier surface height lowering of −0.9 m, i.e., −0.02 m·d−1.
- We detected a mean glacier surface movement of 0.93 m, max. 3.5 m, i.e., 0.02 m·d−1, max. 0.07 m·d−1.
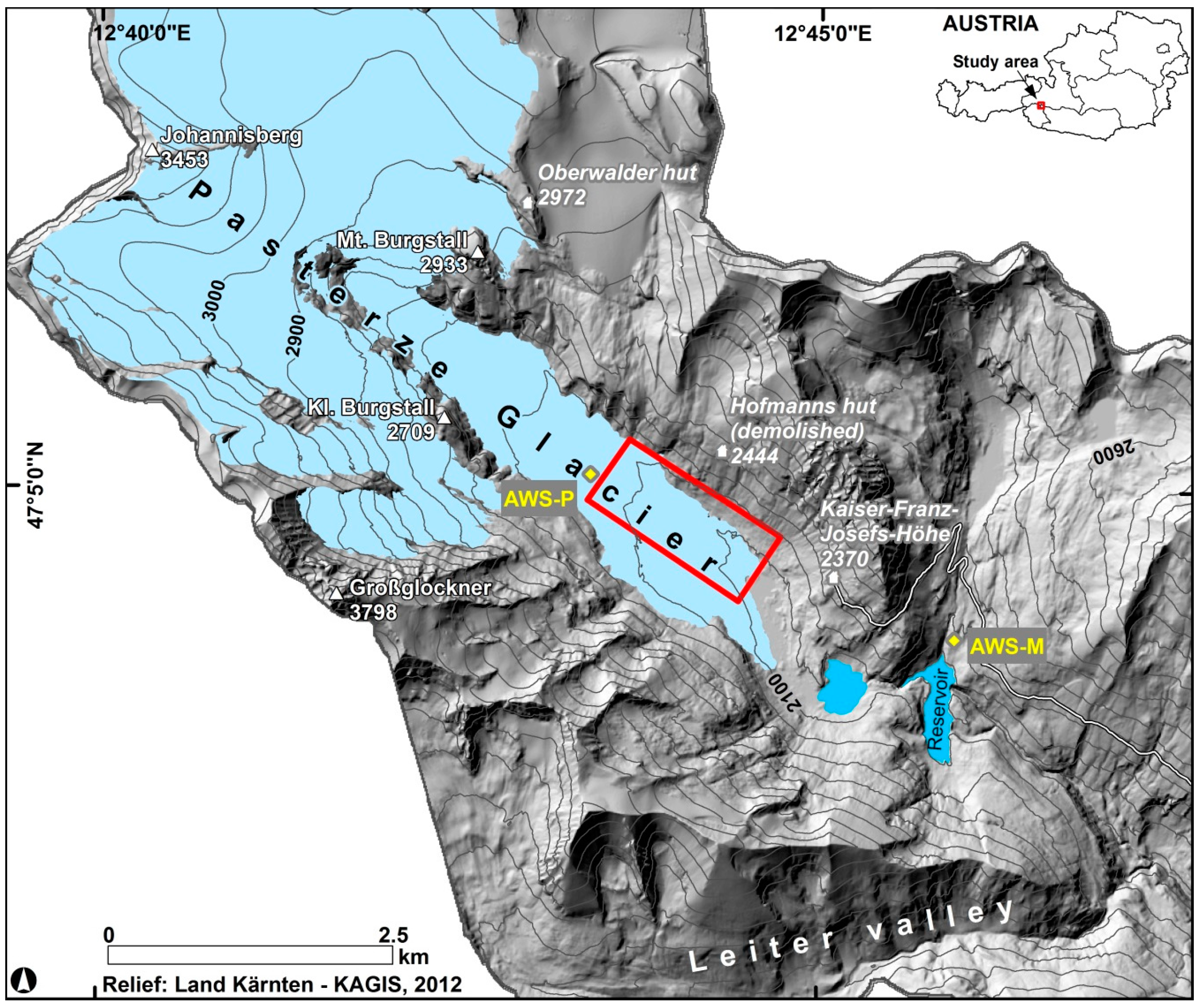
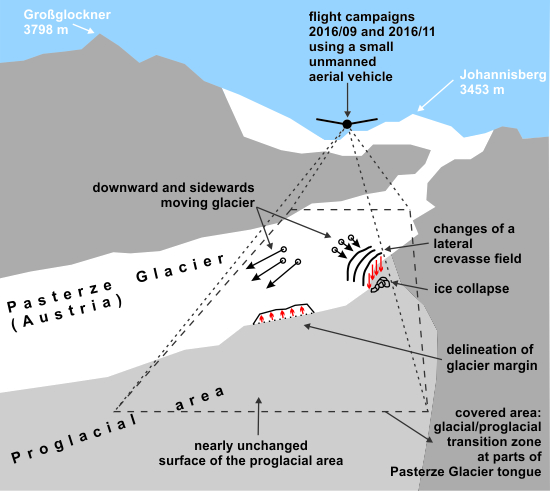
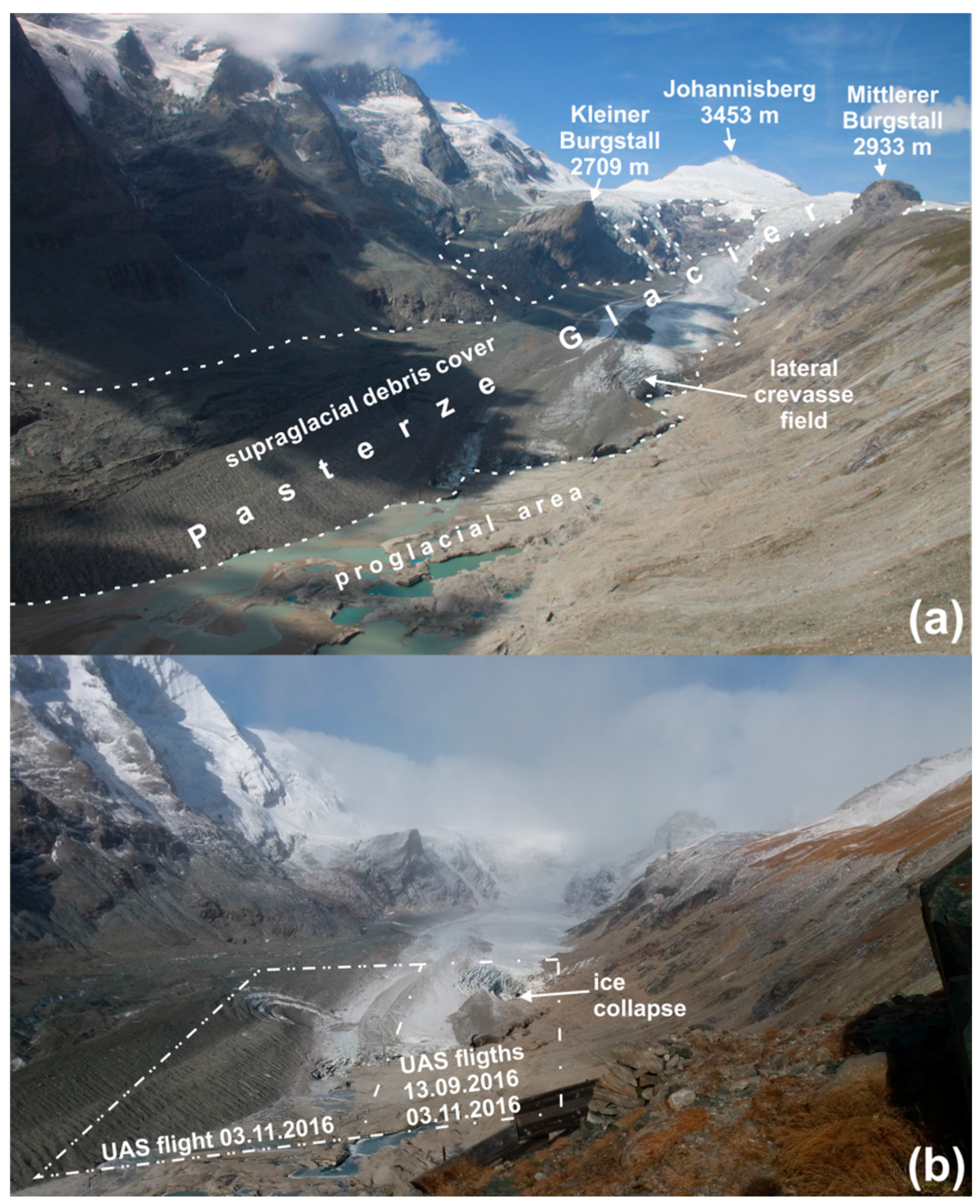
- The glacier movement forced ice collapses at a lateral crevasse field leading to a maximum elevation decrease of −31 m. The most northwestern section of the studied glacier parts are characterized by surface movement only, whereas a substantial surface height lowering did not occur.
- By calculating the DDF-values and comparing these values with earlier studies, we were able to quantify the ablation rates as typical for a high alpine glacier in the European Alps.
- We delineated the glacier margin manually by using our orthophotos. However, for some parts of the glacier terminus, we were able to correct our mapping based on ERT measurements which revealed debris-covered glacier ice possibly still connected to the glacier tongue. Therefore, this geophysical approach is valuable to be applied in addition to UAS flight campaigns.
- The surface of the proglacial area did not substantially change, with one exception in the most northwestern part of the studied area. The glacial and proglacial transition zone behaves like the proglacial area with a nearly non-changing surface as indicated by UAS-based DEMs. As shown by ERT measurements, the underlying material—glacier ice or dead ice—does not influence the debris-covered surface behavior.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bernard, É.; Friedt, J.M.; Tolle, F.; Marlin, C.; Griselin, M. Using a small COTS UAV to quantify moraine dynamics induced by climate shift in Arctic environments. Int. J. Remote Sens. 2017, 38, 2480–2494. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Pajares, G. Overview and current status of remote sensing applications based on unmanned aerial vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–329. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Martín-Torres, F.J.; Kumar, R. UAVs as remote sensing platform in glaciology: Present applications and future prospects. Remote Sens. Environ. 2016, 175, 196–204. [Google Scholar] [CrossRef]
- Immerzeel, W.W.; Kraaijenbrink, P.D.A.; Shea, J.M.; Shrestha, A.B.; Pellicciotti, F.; Bierkens, M.F.P.; de Jong, S.M. High-resolution monitoring of Himalayan glacier dynamics using unmanned aerial vehicles. Remote Sens. Environ. 2014, 150, 93–103. [Google Scholar] [CrossRef]
- Friedli, E. Photogrammetric Methods for the Reconstruction and Monitoring of Glaciers. Master’s Thesis, ETH Zürich, Zürich, Switzerland, 28 January 2013. [Google Scholar]
- Santagata, T. Using Unmanned Aerial Vehicles for monitoring glacial moulins. Geophys. Res. Abstr. 2016, 18, EGU2016-3875-1. [Google Scholar]
- Gindraux, S.; Boesch, R.; Farinotti, D. Accuracy Assessment of Digital Surface Models from Unmanned Aerial Vehicles’ Imagery on Glaciers. Remote Sens. 2017, 9, 186. [Google Scholar] [CrossRef]
- Wakonigg, H. Die Nachmessungen an der Pasterze von 1879 bis 1990. Arb. Geogr. Inst. Graz 1991, 30, 271–307. [Google Scholar]
- Lieb, G.K. Die Pasterze: 125 Jahre Gletschermessungen und ein neuer Führer zum Gletscherweg. Grazer Mitt. d. Geogr. u. R. 2004, 34, 3–5. [Google Scholar]
- Wakonigg, H.; Tintor, W. Zum Massenumsatz der Pasterzenzunge zwischen 1979 und 1994. Wiss. Mitt. a. d. Nationalpark Hohe Tauern 1999, 5, 193–203. [Google Scholar]
- Kaufmann, V.; Kellerer-Pirklbauer, A.; Kenyi, L.W. Gletscherbewegungsmessung mittels satellitengestützter Radar-Interferometrie: Die Pasterze (Glocknergruppe, Hohe Tauern, Kärnten). Zeitschr. f. Gletscherkunde u. Glazialgeologie 2008, 42, 85–104. [Google Scholar]
- Kaufmann, V.; Kellerer-Pirklbauer, A.; Lieb, G.K.; Slupetzky, H.; Avian, M. Glaciological Studies at Pasterze Glacier (Austria) Based on Aerial Photographs. In Monitoring and Modeling of Global Changes: A Geomatics Perpectic; Li, J., Yang, X., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 173–198. [Google Scholar]
- Gspurning, J.; Tintor, W.; Tribuser, M.; Wakonigg, H. Volumen- und Flächenänderungen an der Pasterze von 1981 bis 2000. Carinthia II 2004, 194, 463–472. [Google Scholar]
- Kellerer-Pirklbauer, A.; Lieb, G.K.; Avian, M.; Gspurning, J. The response of partially debris-covered valley glaciers to climate change: the example of the Pasterze Glacier (Austria) in the period 1964 to 2006. Geogr. Ann. 2008, 90, 269–285. [Google Scholar] [CrossRef]
- Kellerer-Pirklbauer, A. The Supraglacial Debris System at the Pasterze Glacier, Austria: Spatial Distribution, Characteristics and Transport of Debris. Ann. Geomorph. 2008, 52 (Suppl. S1), 3–25. [Google Scholar] [CrossRef]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV Photogrammetry for Mapping and 3D Modeling—Current Status and Future Perspectives. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, XXXVIII-1/C22, 25–31. [Google Scholar] [CrossRef]
- Schöttl, S.; Seier, G.; Rascher, E.; Sulzer, W.; Sass, O. UAS-Based Quantification of Sedimentary Body Changes at Langgriesgraben, Styria, Austria. Geoph. Res. Abstr. 2016, 18, EGU2016-15077-1. [Google Scholar]
- Seier, G.; Stangl, J.; Schöttl, S.; Sulzer, W.; Sass, O. UAV and TLS for monitoring a creek in an alpine environment, Styria, Austria. Int. J. Remote Sens. 2017, 38, 2903–2920. [Google Scholar] [CrossRef]
- Kneisel, C.; Hauck, C. Electrical methods. In Applied Geophysics in Periglacial Environments; Hauck, C., Kneisel, C., Eds.; Cambridge University Press: Cambridge, UK, 2008; pp. 3–27. [Google Scholar]
- Kneisel, C. New Insights into Mountain Permafrost Occurrence and Characteristics in Glacier Forefields at High Altitude through the Application of 2D Resistivity Imaging. Permafr. Periglac. Process. 2004, 15, 221–227. [Google Scholar] [CrossRef]
- Bosson, J.-B.; Deline, P.; Bodin, X.; Schoeneich, P.; Baron, L.; Gardent, M.; Lambiel, C. The influence of ground ice distribution on geomorphic dynamics since the Little Ice Age in proglacial areas of two cirque glacier systems. Earth Surf. Process. Landf. 2015, 40, 666–680. [Google Scholar] [CrossRef]
- Lieb, G.K.; Kellerer-Pirklbauer, A. Die Pasterze, Österreichs größter Gletscher, und seine lange Messreihe in einer Ära massiven Gletscherschwundes. In Geschichte Des Ewigen Eises; Fischer, A., Ed.; Springer: Berlin/Heidelberg, Germany, 2017; in press. [Google Scholar]
- Wakonigg, H.; Lieb, G.K. Die Pasterze und ihre Erforschung im Rahmen der Gletschermessungen. Kärntner Nationalpark Schr. 1996, 8, 99–115. [Google Scholar]
- Verhoeven, G.J.J. It’s all about the format—Unleashing the power of RAW aerial photography. Int. J. Remote Sens. 2010, 31, 2009–2042. [Google Scholar] [CrossRef]
- Loke, M.H. Electrical Imaging Surveys for Environmental and Engineering Studies—A Practical Guide to 2-D and 3-D Surveys; RES2DINV Manual: Penang, Malaysia, 2000; p. 67. [Google Scholar]
- Hock, R. Temperature index melt modelling in mountain areas. J. Hydrol. 2003, 282, 104–115. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic Structure from Motion: A New Development in Photogrammetric Measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-From-Motion’ Photogrammetry: A Low-Cost, Effective Tool for Geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Micheletti, N.; Chandler, J.H.; Lane, S.N. Structure from Motion (Sfm) Photogrammetry. In Geomorphological Techniques; Cook, S.J., Clarke, L.E., Nield, J.M., Eds.; British Society for Geomorphology: London, UK, 2015; pp. 1–12. ISBN 2047-0371. [Google Scholar]
- Peppa, M.V.; Mills, J.P.; Moore, P.; Miller, P.E.; Chambers, J.E. Accuracy Assessment of a UAV-Based Landslide Monitoring System. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B5, 895–902. [Google Scholar] [CrossRef]
- Image Correlation Software CIAS. Available online: http://www.mn.uio.no/geo/english/research/projects/icemass/cias (accessed on 18 December 2016).
- Debella-Gilo, M.; Kääb, A. Sub-pixel precision image matching for measuring surface displacements on mass movements using normalized cross-correlation. Remote Sens. Environ. 2011, 115, 130–142. [Google Scholar] [CrossRef]
- Höhle, J.; Höhle, M. Accuracy Assessment of Digital Elevation Models by Means of Robust Statistical Methods. ISPRS J. Photogramm. Remote Sens. 2009, 64, 398–406. [Google Scholar] [CrossRef]
- Coveney, S.; Roberts, K. Lightweight UAV digital elevation models and orthoimagery for environmental applications: Data accuracy evaluation and potential for river flood risk modelling. Int. J. Remote Sens. 2017, 38, 3159–3180. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Lang, H. Forecasting meltwater runoff from snow-covered areas and from glacier basins. In River Flow Modelling and Forecasting; Kraijenhoff, D.A., Moll, J.R., Eds.; D. Reidel Publishing Company: Dordrecht, The Netherlands, 1986; pp. 99–127. [Google Scholar]
- Kuhn, M. Die Reaktion der österreichischen Gletscher und ihres Abflusses auf Änderungen von Temperatur und Niederschlag. Österr. Wasser- u. Abfallwirtschaft 2004, 56, 1–17. [Google Scholar]
- Kellerer-Pirklbauer, A.; Lieb, G.K.; Avian, M.; Carrivick, J. Climate change and rock fall events in high mountain areas: Numerous and extensive rock falls in 2007 at Mittlerer Burgstall, Central Austria. Geografiska Annaler 2012, 94, 59–78. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Profile | Date | Used Arrays for Analyses 1 | Max. (ohm.m) | Min. (ohm.m) |
|---|---|---|---|---|
| PAG1 | 13 September 2016 | Wen, Schlu | 278,173 | 800 |
| PAG2 | 13 September 2016 | Wen, Schlu | 346,081 | 870 |
| PAG3 | 13 September 2016 | Schlu | 208,854 | 776 |
| PAG4 | 13 September 2016 | Wen | 2,119,057 | 258 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seier, G.; Kellerer-Pirklbauer, A.; Wecht, M.; Hirschmann, S.; Kaufmann, V.; Lieb, G.K.; Sulzer, W. UAS-Based Change Detection of the Glacial and Proglacial Transition Zone at Pasterze Glacier, Austria. Remote Sens. 2017, 9, 549. https://doi.org/10.3390/rs9060549
Seier G, Kellerer-Pirklbauer A, Wecht M, Hirschmann S, Kaufmann V, Lieb GK, Sulzer W. UAS-Based Change Detection of the Glacial and Proglacial Transition Zone at Pasterze Glacier, Austria. Remote Sensing. 2017; 9(6):549. https://doi.org/10.3390/rs9060549
Chicago/Turabian StyleSeier, Gernot, Andreas Kellerer-Pirklbauer, Matthias Wecht, Simon Hirschmann, Viktor Kaufmann, Gerhard K. Lieb, and Wolfgang Sulzer. 2017. "UAS-Based Change Detection of the Glacial and Proglacial Transition Zone at Pasterze Glacier, Austria" Remote Sensing 9, no. 6: 549. https://doi.org/10.3390/rs9060549