
A Novel Method of Change Detection in Bi-Temporal PolSAR Data Using a Joint-Classification Classifier Based on a Similarity Measure


Abstract
:
1. Introduction
2. Materials and Methods
2.1. The Model of PolSAR Data
2.2. The Sequence of Classification in the Proposed Method
2.3. Test Statistics for the Equality of Two Complex Wishart Matrices
2.4. Kittler and Illingworth Algorithm
2.5. The JCC-TSKI Classifier
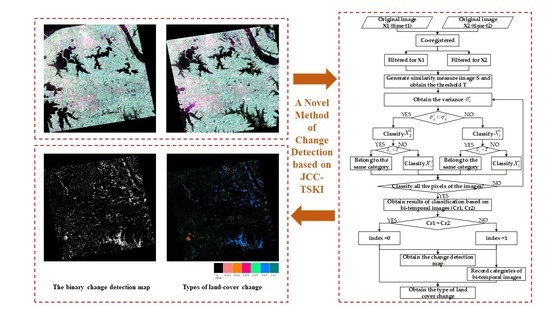
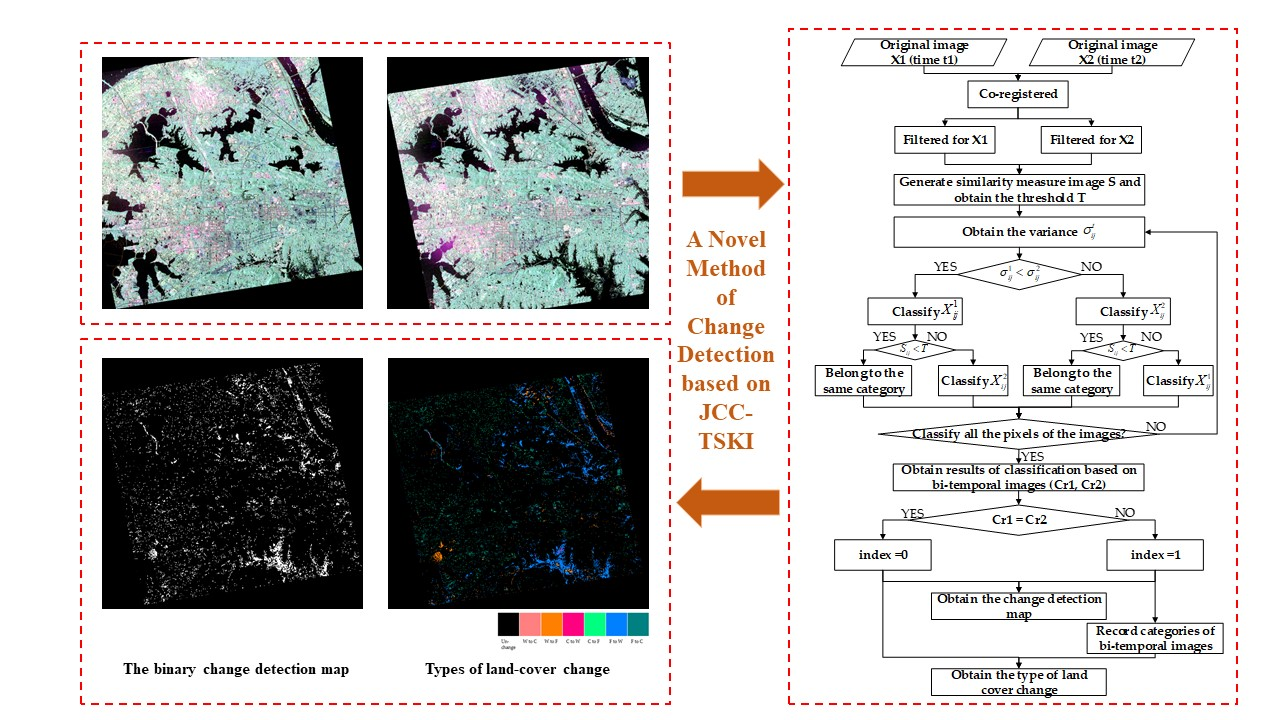
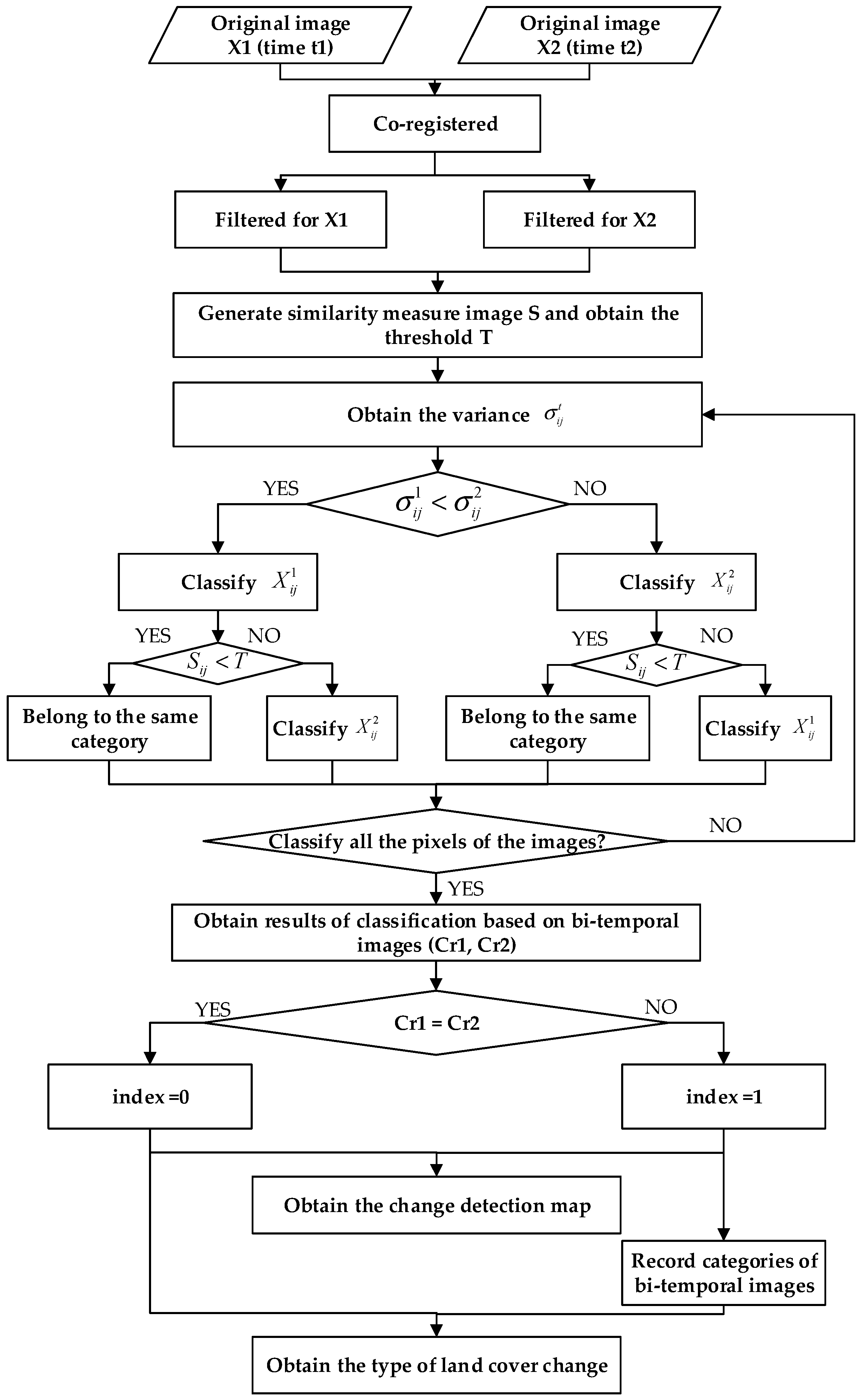
2.6. The Proposed JCC-TSKI Method
- Step 1
- The bi-temporal PolSAR images should be co-registered and filtered. Image registration is performed to align the images used in the change detection. Speckle filtering is commonly used to suppress speckle noise before the change detection and classification of PolSAR images. The preprocessing is important for change detection. In this study, Refined Lee filtering based on 7 × 7 windows was used to remove speckle noise [22].
- Step 2
- The similarity measure can be obtained through the test statistics (TS) using the coherence matrix of the bi-temporal images. In this step, bi-temporal fully PolSAR data are used to generate the S. Furthermore, K & I is used to select the optimum threshold for S.
- Step 3
- Variances of intensity are used to determine the sequence of JCC-TSKI.
- Step 4
- If , we choose X1 to be firstly classified; otherwise, we choose X2 to be firstly classified.
- Step 5
- Determine the category of position . If , this means that the bi-temporal PolSAR data in the same position is similar, and the class label in the corresponding pixel position of another time concurs with the reference; otherwise, we classify the corresponding pixel position of the other time on its own.
- Step 6
- Check whether all the pixels of the bi-temporal PolSAR images are classified or not. If not, move to the next pixel, and return to step 3; otherwise, obtain the results of classification based on bi-temporal images.
- Step 7
- Check whether class labels of bi-temporal images are equal or not. If not, record the labels, and consider index = 1; otherwise, consider index = 0.
- Step 8
- We can obtain the change detection map by the value of index and the type of land cover change by the record of labels.
2.7. Evaluation Criterion
3. Results and Discussion
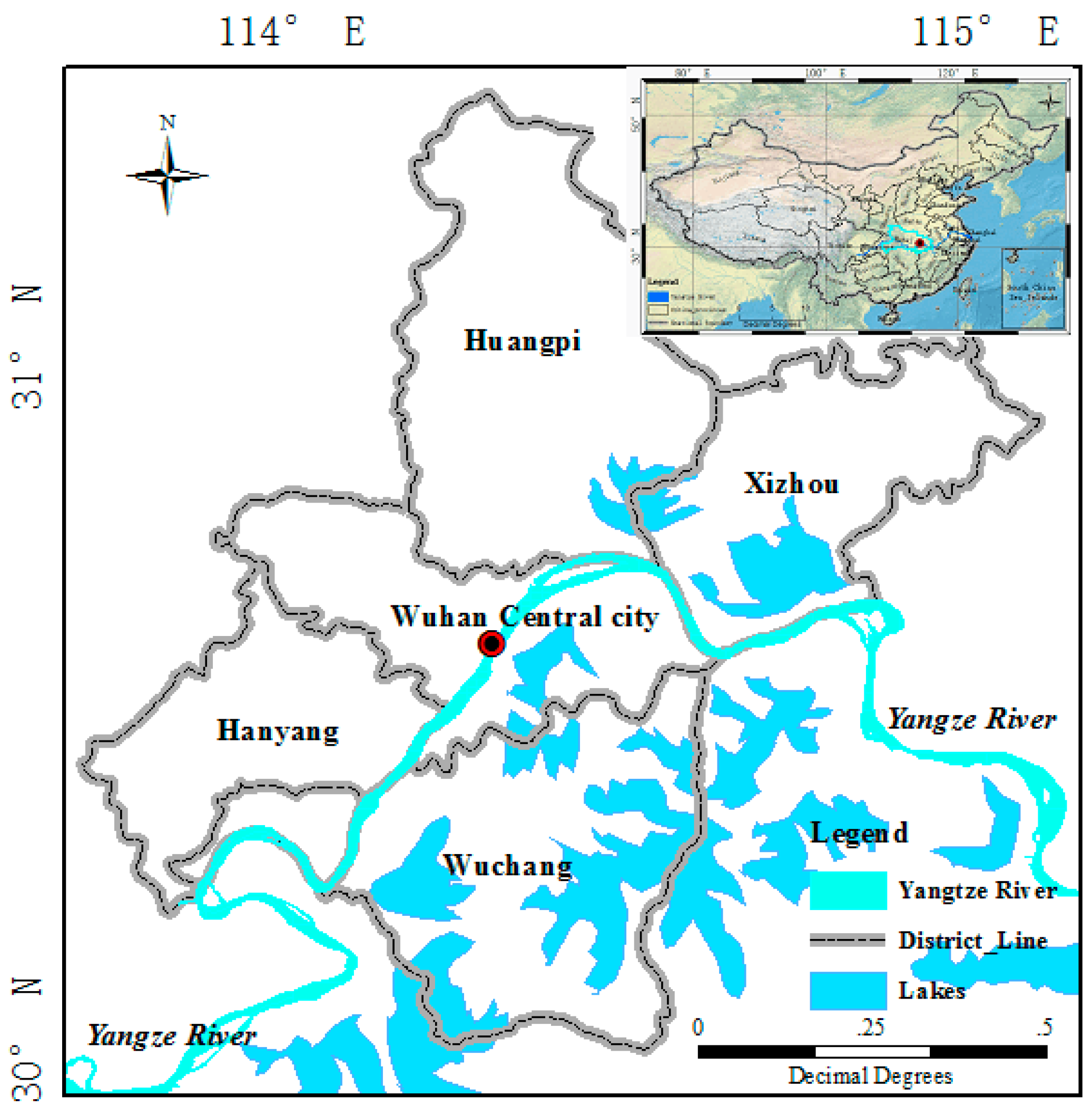
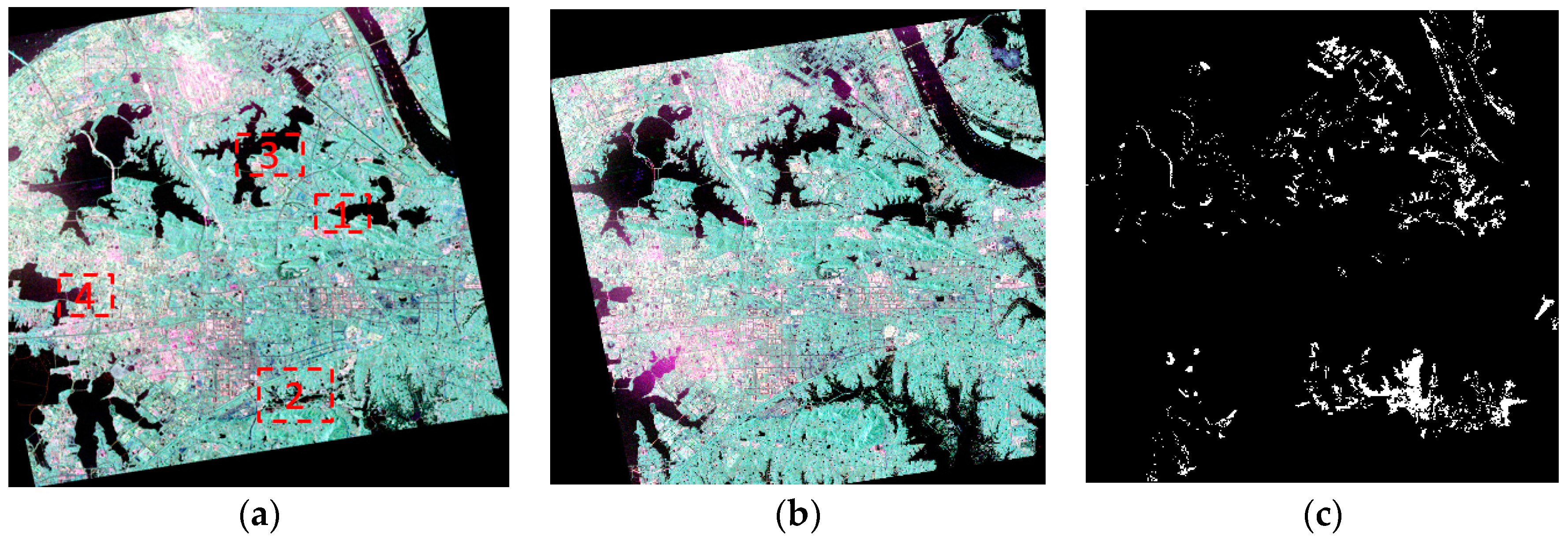
3.1. Study Area and Background
3.2. RADARSAT-2 Images and Preprocessing
3.3. Result of Change Detection in the Bi-Temporal PolSAR Images
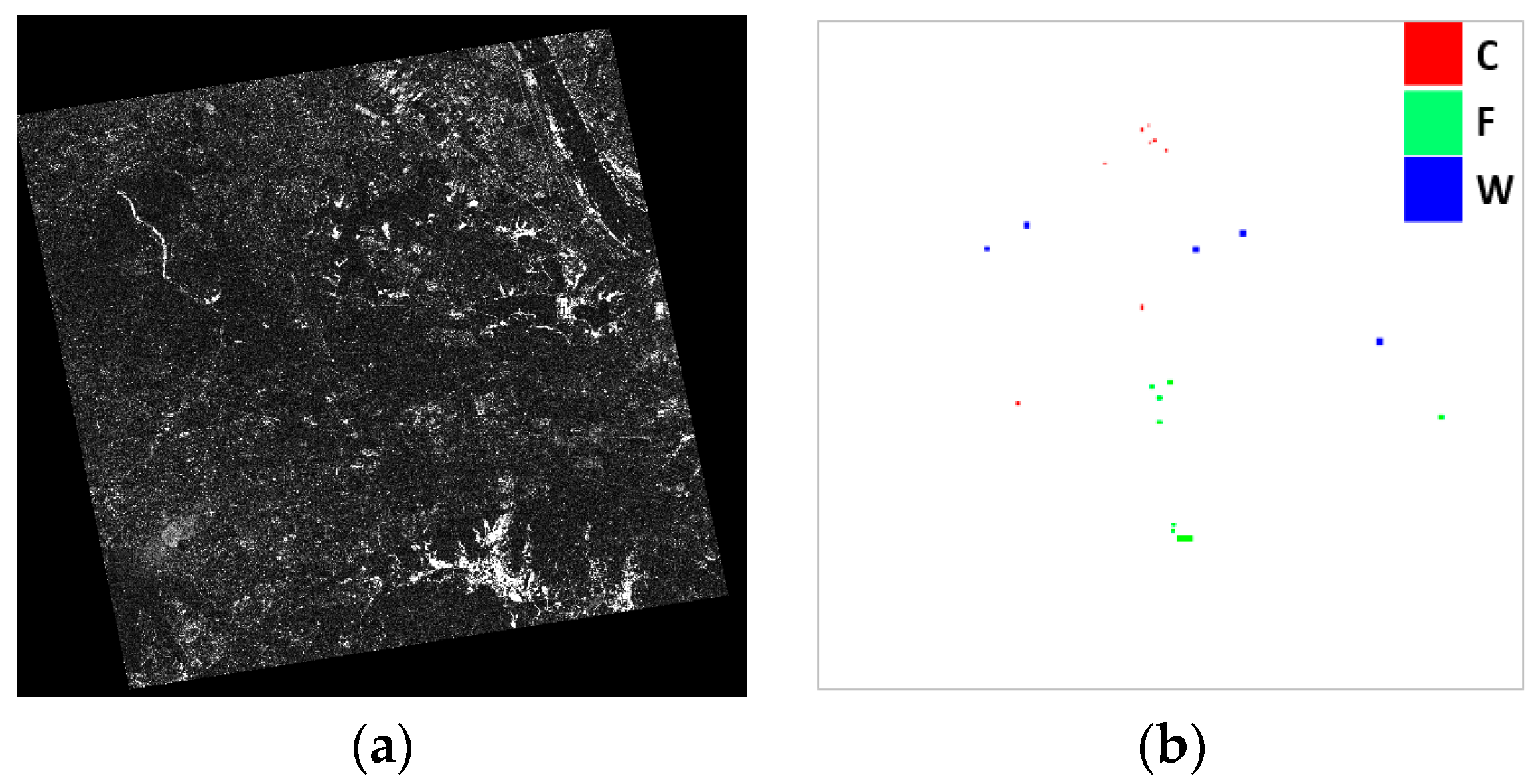
3.3.1. Similarity Measures
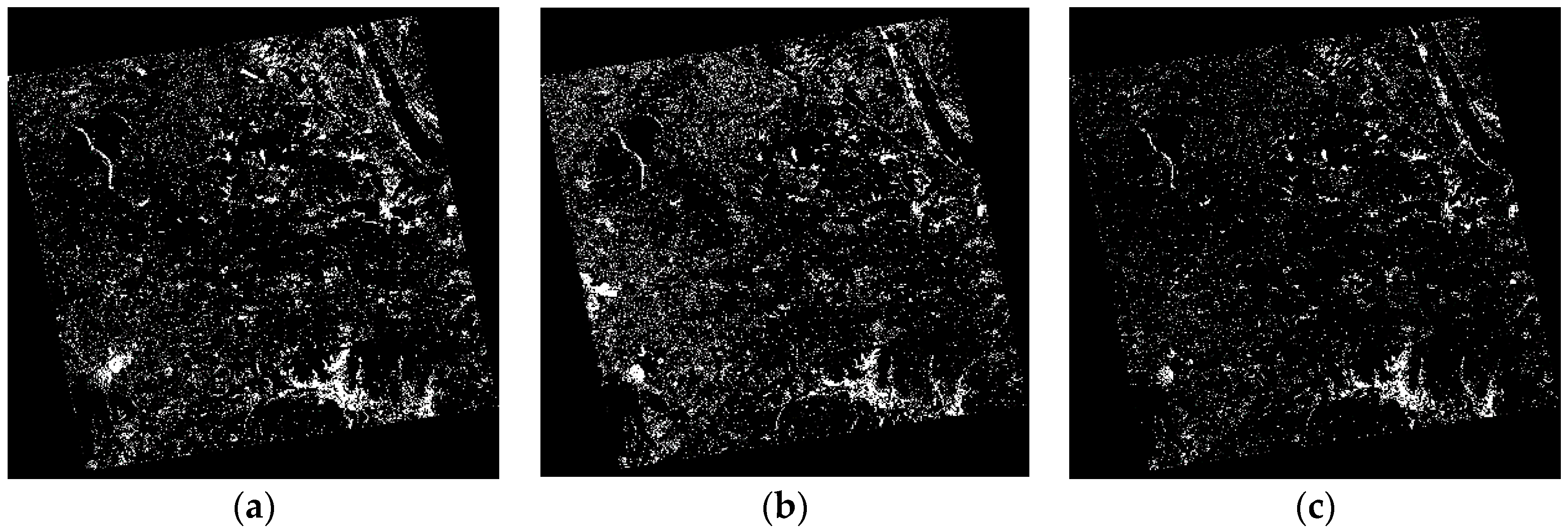
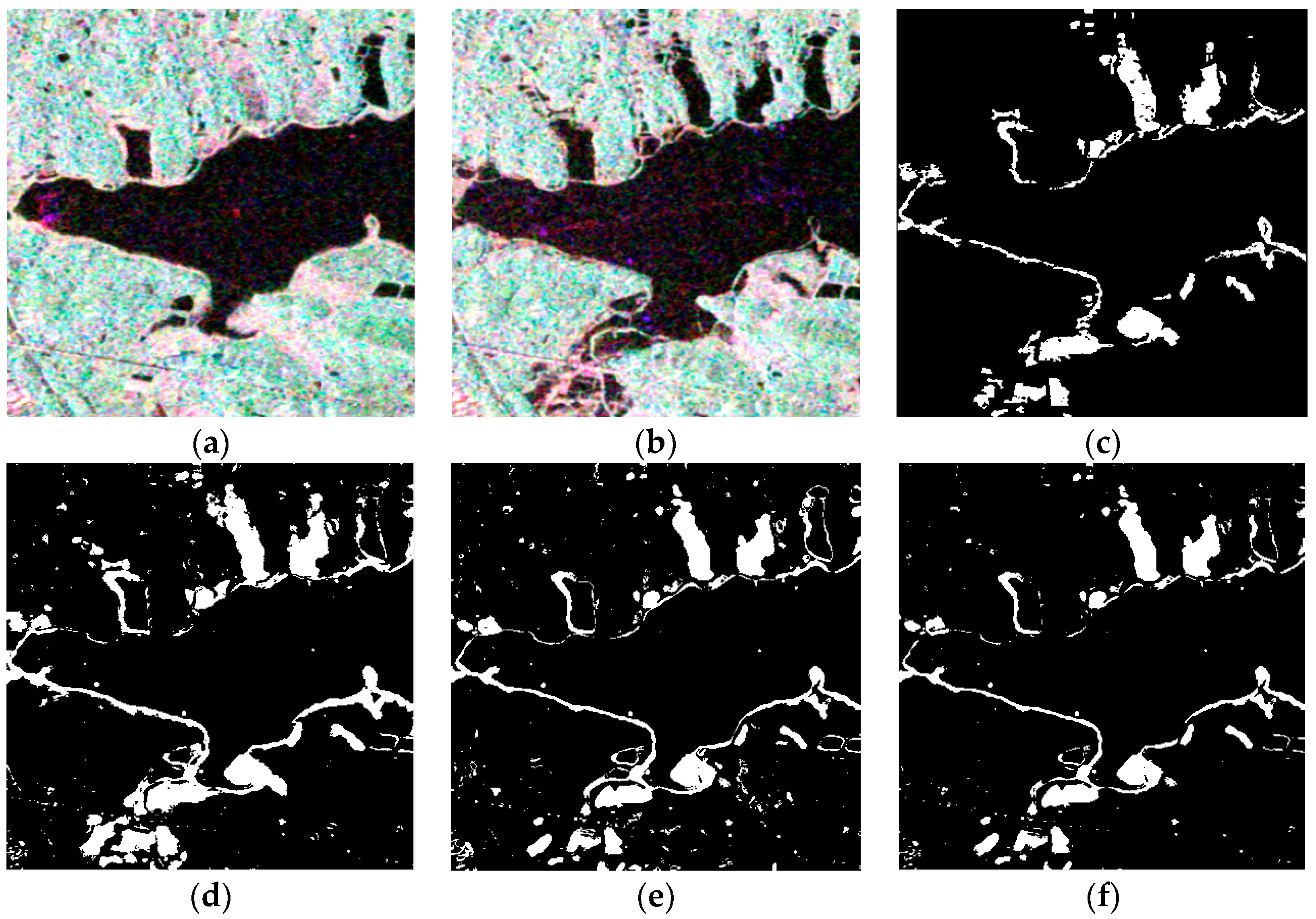
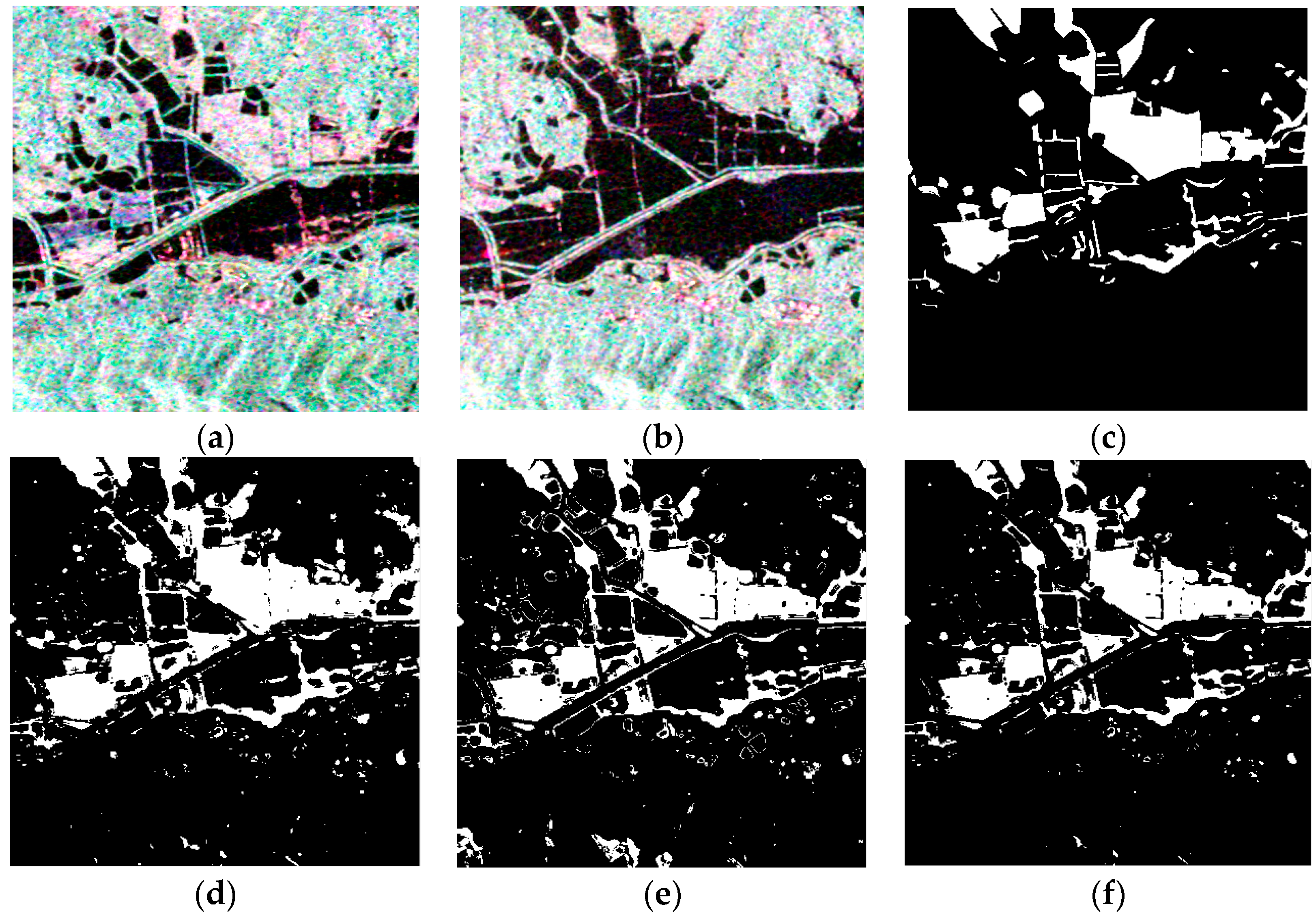
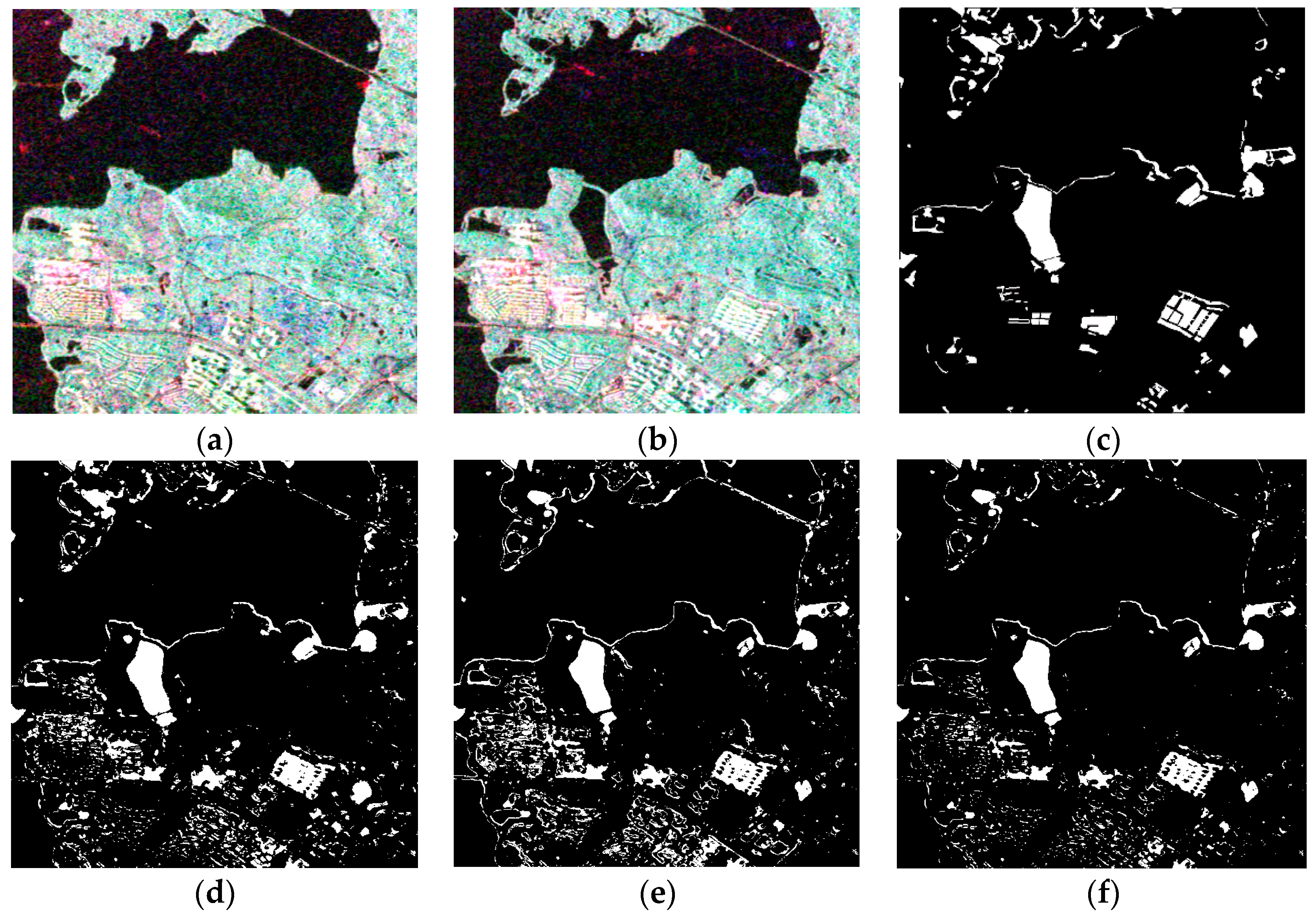
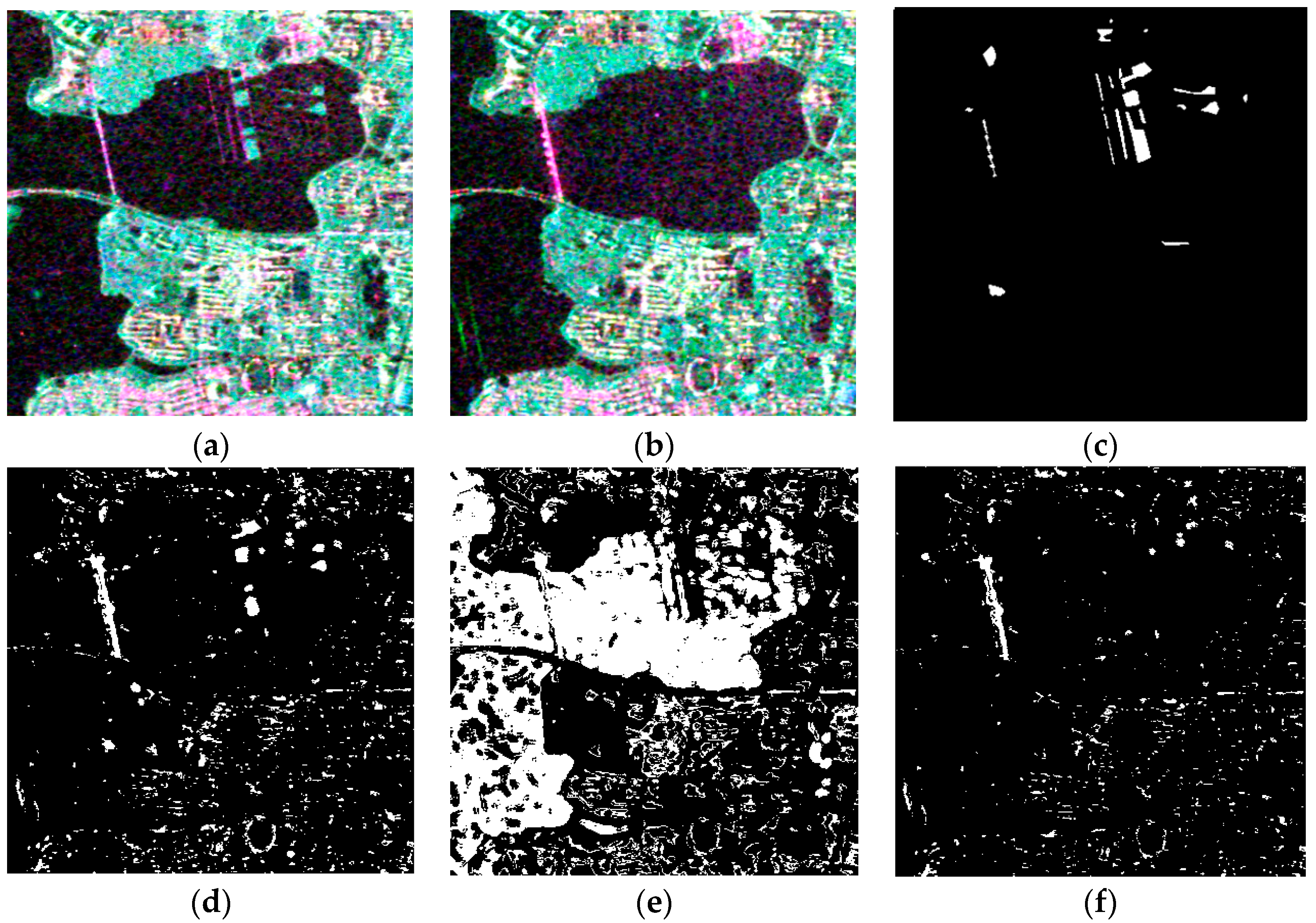
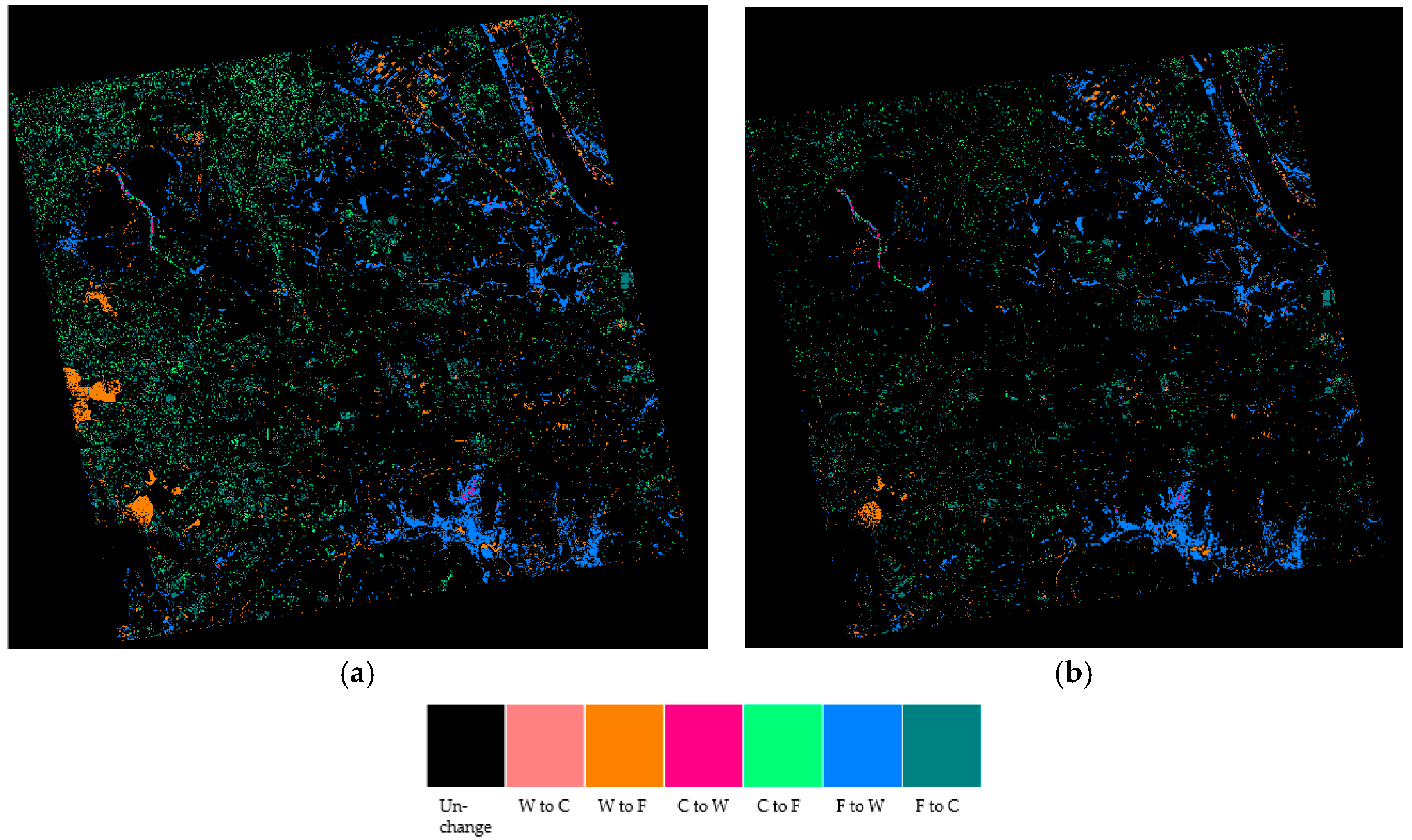
3.3.2. Experimental Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Singh, A. Review article digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef]
- Bruzzone, L.; Bovolo, F. A novel framework for the design of change-detection systems for very-high-resolution remote sensing images. IEEE Proc. 2013, 101, 609–630. [Google Scholar] [CrossRef]
- Anaya, J.A.; Colditz, R.R.; Valencia, G.M. Land Cover Mapping of a Tropical Region by Integrating Multi-Year Data into an Annual Time Series. Remote Sens. 2015, 7, 16274–16292. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.Q.; Yang, J.; Li, P.X.; Liu, M.Y.; Shi, Y.M. An Unsupervised Change Detection Based on Test Statistic and KI from Multi-temporal and Full Polarimetric SAR Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B7, 611–615. [Google Scholar] [CrossRef]
- Conradsen, K.; Nielsen, A.A.; Schou, J.; Skriver, H. A test statistic in the complex Wishart distribution and its application to change detection in polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 4–19. [Google Scholar] [CrossRef]
- Lu, Z.; Kwoun, O. Radarsat-1 and ERS InSAR analysis over southeastern coastal Louisiana: Implications for mapping water-level changes beneath swamp forests. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2167–2184. [Google Scholar] [CrossRef]
- Zhao, L.L.; Yang, J.; Li, P.X.; Zhang, L.P. Seasonal inundation monitoring and vegetation pattern mapping of the Erguna floodplain by means of a RADARSAT-2 fully polarimetric time series. Remote Sens. Environ. 2014, 152, 426–440. [Google Scholar] [CrossRef]
- Huang, C.Q. Forest Change Analysis Using Time-Series Landsat Observations. In Advances in Environmental Remote Sensing: Sensors, Algorithms, and Applications; CRC Press: Boca Raton, FL, USA, 2011; pp. 339–365. [Google Scholar]
- Kwoun, O.-I.; Lu, Z. Multi-temporal RADARSAT-1 and ERS backscattering signatures of coastal wetlands in southeastern Louisiana. Photogramm. Eng. Remote Sens. 2009, 75, 607–617. [Google Scholar] [CrossRef]
- Celik, T. Unsupervised change detection in satellite images using principal component analysis and k-means clustering. IEEE Geosci. Remote Sens. Lett. 2009, 6, 772–776. [Google Scholar] [CrossRef]
- Song, D.-X.; Huang, C.Q.; Sexton, J.O.; Channan, S.; Feng, M.; Townshend, J.R. Use of Landsat and Corona data for mapping forest cover change from the mid-1960s to 2000s: Case studies from the Eastern United States and Central Brazil. ISPRS J. Photogramm. Remote Sens. 2015, 103, 81–92. [Google Scholar] [CrossRef]
- Sun, W.D.; Shi, L.; Yang, J.; Li, P.X. Building collapse assessment in urban areas using texture information from postevent SAR data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3792–3808. [Google Scholar] [CrossRef]
- Zhao, L.L.; Yang, J.; Li, P.X.; Zhang, L.P.; Shi, L.; Lang, F.K. Damage assessment in urban areas using post-earthquake airborne PolSAR imagery. Int. J. Remote Sens. 2013, 34, 8952–8966. [Google Scholar] [CrossRef]
- Zhao, L.L.; Yang, J.; Li, P.X.; Zhang, L.P. Characteristics analysis and classification of crop harvest patterns by exploiting high-frequency multipolarization SAR data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3773–3783. [Google Scholar] [CrossRef]
- Lu, Z.; Dzurisin, D. InSAR imaging of Aleutian volcanoes. In InSAR Imaging of Aleutian Volcanoes; Springer: Berlin, Germany, 2014; pp. 87–345. [Google Scholar]
- Novellino, A.; Cigna, F.; Sowter, A.; Ramondini, M.; Calcaterra, D. Exploitation of the Intermittent SBAS (ISBAS) algorithm with COSMO-SkyMed data for landslide inventory mapping in north-western Sicily, Italy. Geomorphology 2017, 280, 153–166. [Google Scholar] [CrossRef]
- Rignot, E.J.; van Zyl, J.J. Change detection techniques for ERS-1 SAR data. IEEE Trans. Geosci. Remote Sens. 1993, 31, 896–906. [Google Scholar] [CrossRef]
- Bazi, Y.; Bruzzone, L.; Melgani, F. An unsupervised approach based on the generalized Gaussian model to automatic change detection in multitemporal SAR images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 874–887. [Google Scholar] [CrossRef]
- Moser, G.; Serpico, S.B. Generalized minimum-error thresholding for unsupervised change detection from SAR amplitude imagery. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2972–2982. [Google Scholar] [CrossRef]
- Sumaiya, M.; Kumari, R.S.S. Logarithmic Mean-Based Thresholding for SAR Image Change Detection. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1726–1728. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, H.; Wang, C.; Wu, F. Change detection of multilook polarimetric SAR images using heterogeneous clutter models. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7483–7494. [Google Scholar]
- Lee, J.-S.; Jurkevich, L.; Dewaele, P.; Wambacq, P.; Oosterlinck, A. Speckle filtering of synthetic aperture radar images: A review. Remote Sens. Rev. 1994, 8, 313–340. [Google Scholar] [CrossRef]
- Cozzolino, D.; Parrilli, S.; Scarpa, G.; Poggi, G.; Verdoliva, L. Fast adaptive nonlocal SAR despeckling. IEEE Geosci. Remote Sens. Lett. 2014, 11, 524–528. [Google Scholar] [CrossRef]
- Carincotte, C.; Derrode, S.; Bourennane, S. Unsupervised change detection on SAR images using fuzzy hidden Markov chains. IEEE Trans. Geosci. Remote Sens. 2006, 44, 432–441. [Google Scholar] [CrossRef]
- Bouyahia, Z.; Benyoussef, L.; Derrode, S. Change detection in synthetic aperture radar images with a sliding hidden Markov chain model. J. Appl. Remote Sens. 2008, 2, 023526. [Google Scholar] [Green Version]
- Inglada, J.; Mercier, G. A new statistical similarity measure for change detection in multitemporal SAR images and its extension to multiscale change analysis. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1432–1445. [Google Scholar] [CrossRef]
- Akbari, V.; Anfinsen, S.N.; Doulgeris, A.P.; Eltoft, T.; Moser, G.; Serpico, S.B. Polarimetric SAR Change Detection With the Complex Hotelling—Lawley Trace Statistic. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3953–3966. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, H.A.; Wang, H.; Jin, S. Distance Measure Based Change Detectors for Polarimetric SAR Imagery. Photogramm. Eng. Remote Sens. 2016, 82, 719–727. [Google Scholar] [CrossRef]
- Bunch, J.R.; Fierro, R.D. A constant-false-alarm-rate algorithm. Linear Algebra Its Appl. 1992, 172, 231–241. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. Automatica 1975, 11, 23–27. [Google Scholar] [CrossRef]
- Kapur, J.N.; Sahoo, P.K.; Wong, A.K. A new method for gray-level picture thresholding using the entropy of the histogram. Comput. Vis. Graph. Image Proc. 1985, 29, 273–285. [Google Scholar] [CrossRef]
- Kittler, J.; Illingworth, J. Minimum error thresholding. Pattern Recognit. 1986, 19, 41–47. [Google Scholar] [CrossRef]
- Qi, Z.; Yeh, A.G.O.; Li, X.; Zhang, X.H. A three-component method for timely detection of land cover changes using polarimetric SAR images. ISPRS J. Photogramm. Remote Sens. 2015, 107, 3–21. [Google Scholar] [CrossRef]
- Zhou, W.; Troy, A.; Grove, M. Object-based land cover classification and change analysis in the Baltimore metropolitan area using multitemporal high resolution remote sensing data. Sensors 2008, 8, 1613–1636. [Google Scholar] [CrossRef] [PubMed]
- Han, M.; Zhou, Y. Joint-classification change detection based on improved fuzzy ARTMAP. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015. [Google Scholar]
- Gomez, L.; Alvarez, L.; Mazorra, L.; Frery, A.C. Classification of complex Wishart matrices with a diffusion—Reaction system guided by stochastic distances. Philos. Trans. R. Soc. A 2015, 373, 20150118. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.-S.; Grunes, M.R.; Kwok, R. Classification of multi-look polarimetric SAR imagery based on complex Wishart distribution. Int. J. Remote Sens. 1994, 15, 2299–2311. [Google Scholar] [CrossRef]
- Huang, C.; Davis, L.; Townshend, J. An assessment of support vector machines for land cover classification. Int. J. Remote Sens. 2002, 23, 725–749. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Li, J.-J.; Jiao, L.C.; Zhang, X.R.; Yang, D.D. Change detection for SAR images based on joint-classification of bi-temporal images. J. Infrared Millim. Waves 2009, 6, 015. [Google Scholar] [CrossRef]
- Lee, J.-S.; Grunes, M.R.; Ainsworth, T.L.; Du, L.-J.; Schuler, D.L.; Cloude, S.R. Unsupervised classification using polarimetric decomposition and the complex Wishart classifier. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2249–2258. [Google Scholar]
- Yang, W.; Yang, X.L.; Yan, T.H.; Song, H.; Xia, G.S. Region-Based Change Detection for Polarimetric SAR Images Using Wishart Mixture Models. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6746–6756. [Google Scholar] [CrossRef]
- Lee, J.-S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Pham, M.-T.; Mercier, G.; Michel, J. Change detection between SAR images using a pointwise approach and graph theory. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2020–2032. [Google Scholar] [CrossRef]
- Stehman, S.V. Selecting and interpreting measures of thematic classification accuracy. Remote Sens. Environ. 1997, 62, 77–89. [Google Scholar] [CrossRef]
- ESA. The PolSARpro SAR Data Processing and Educational Tool. Available online: https://earth.esa.int/web/polsarpro/home (accessed on 29 May 2017).
- ESA. The Next ESA SAR Toolbox. Available online: http://nest.array.ca/web/nest (accessed on 29 May 2017).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | FA (%) | TE (%) | OA (%) | KAPPA |
|---|---|---|---|---|
| TSKI | 5.64 | 5.92 | 94.08 | 0.6755 |
| PCC | 4.0 | 5.63 | 94.36 | 0.6460 |
| JCC-TSKI | 2.52 | 4.40 | 95.60 | 0.6997 |
| Method | FA (%) | TE (%) | OA (%) | KAPPA |
|---|---|---|---|---|
| TSKI | 7.4 | 8.05 | 91.95 | 0.7038 |
| PCC | 7.4 | 8.99 | 91.05 | 0.6608 |
| JCC-TSKI | 4.68 | 6.80 | 93.20 | 0.7249 |
| Method | FA (%) | TE (%) | OA (%) | KAPPA |
|---|---|---|---|---|
| TSKI | 4.86 | 6.19 | 93.81 | 0.5862 |
| PCC | 5.56 | 7.57 | 92.43 | 0.4919 |
| JCC-TSKI | 2.68 | 5.06 | 94.94 | 0.5927 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Yang, J.; Lu, Z.; Li, P.; Liu, W.; Yang, L. A Novel Method of Change Detection in Bi-Temporal PolSAR Data Using a Joint-Classification Classifier Based on a Similarity Measure. Remote Sens. 2017, 9, 846. https://doi.org/10.3390/rs9080846
Zhao J, Yang J, Lu Z, Li P, Liu W, Yang L. A Novel Method of Change Detection in Bi-Temporal PolSAR Data Using a Joint-Classification Classifier Based on a Similarity Measure. Remote Sensing. 2017; 9(8):846. https://doi.org/10.3390/rs9080846
Chicago/Turabian StyleZhao, Jinqi, Jie Yang, Zhong Lu, Pingxiang Li, Wensong Liu, and Le Yang. 2017. "A Novel Method of Change Detection in Bi-Temporal PolSAR Data Using a Joint-Classification Classifier Based on a Similarity Measure" Remote Sensing 9, no. 8: 846. https://doi.org/10.3390/rs9080846