
Optimizing Polymer Lab-on-Chip Platforms for Ultrasonic Manipulation: Influence of the Substrate

 , ,
, ,
Abstract
:1. Introduction
2. Experimental Section
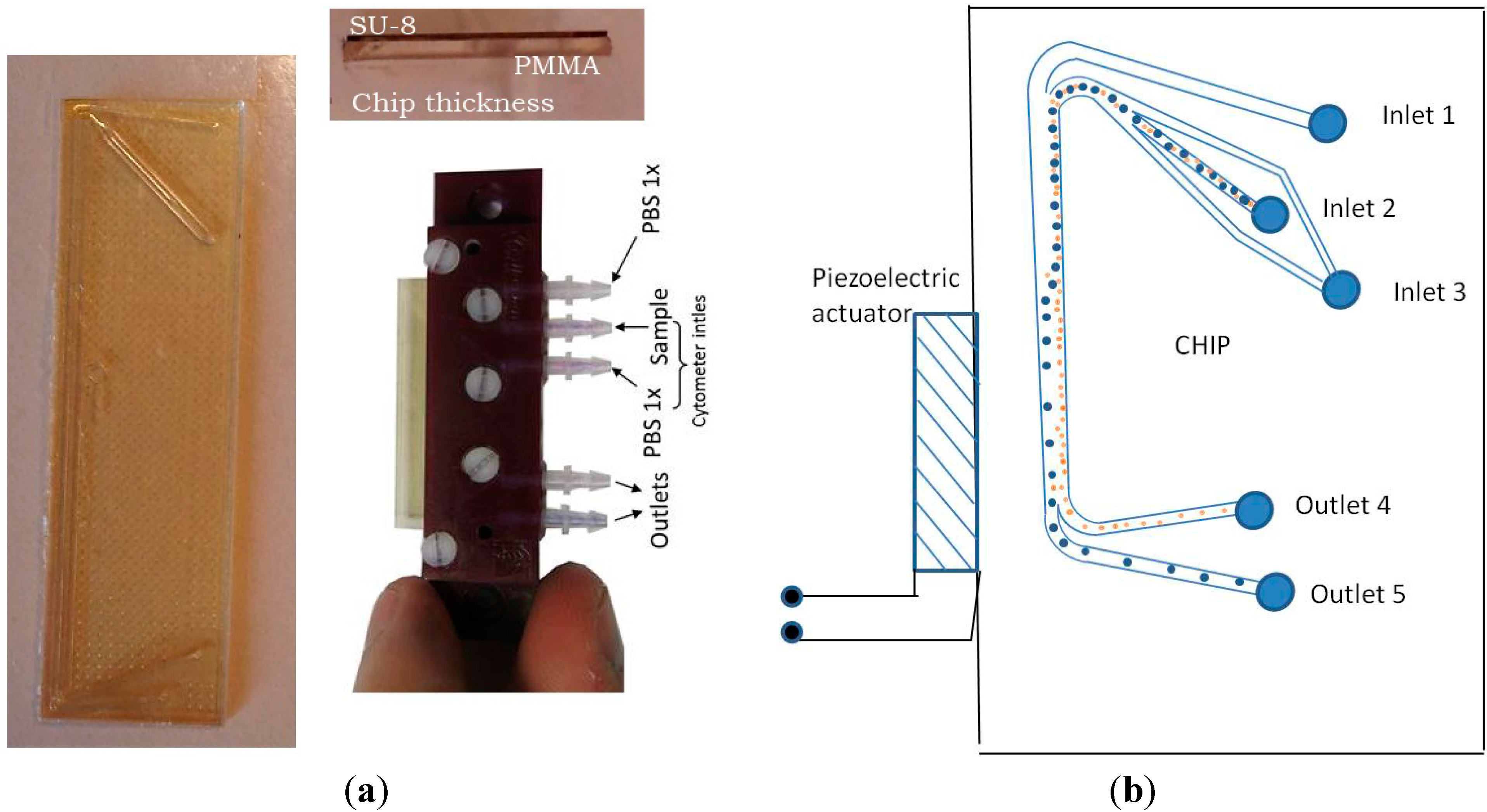
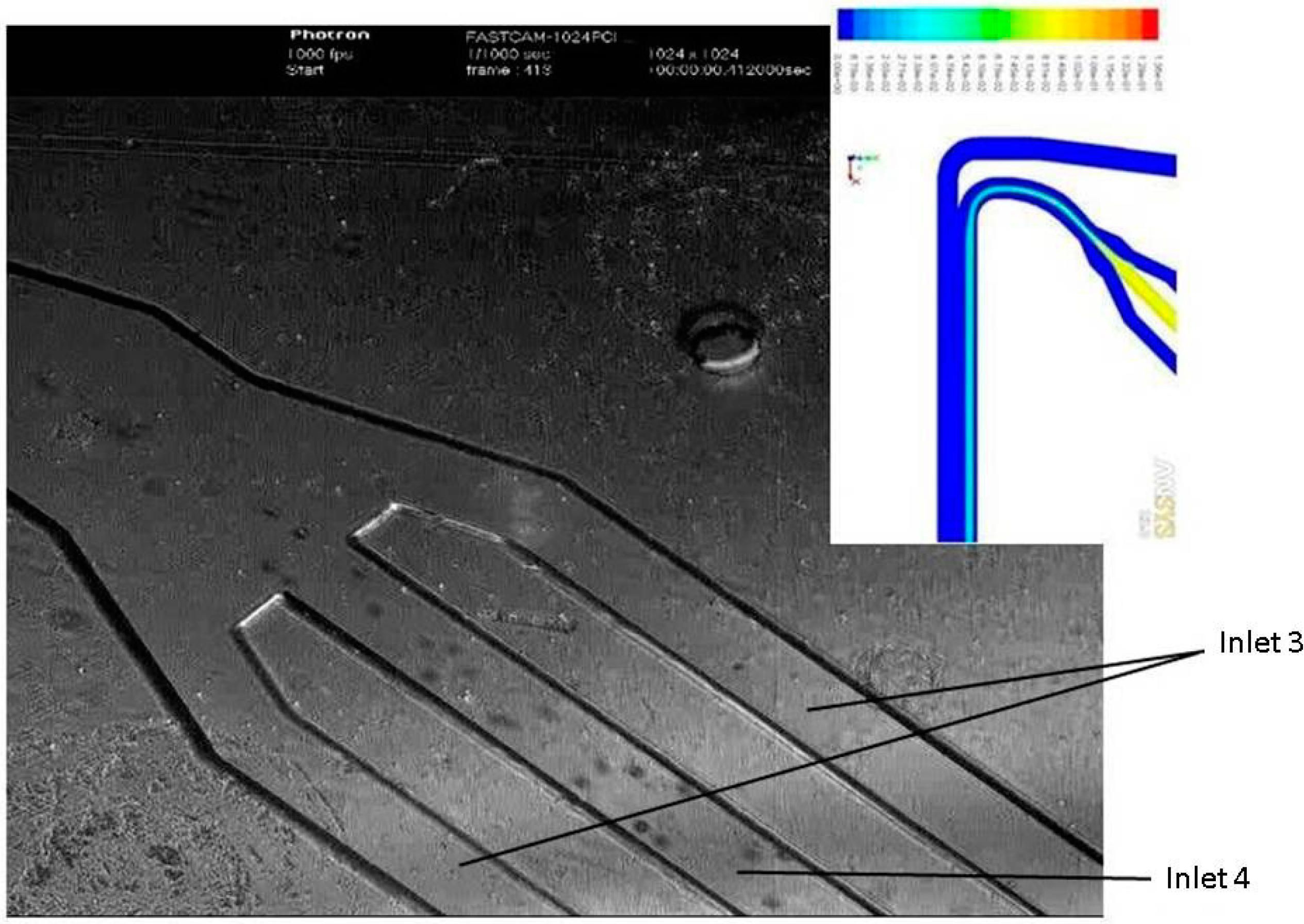
Acoustophoresis Chip



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chip | Chip length | Channel length | Channel width | Channel depth | Chip width |
|---|---|---|---|---|---|
| Rectangular Chip | 35 mm | 32.8 mm | 400 μm | 200 μm | 10 mm |
3. Results and Discussion
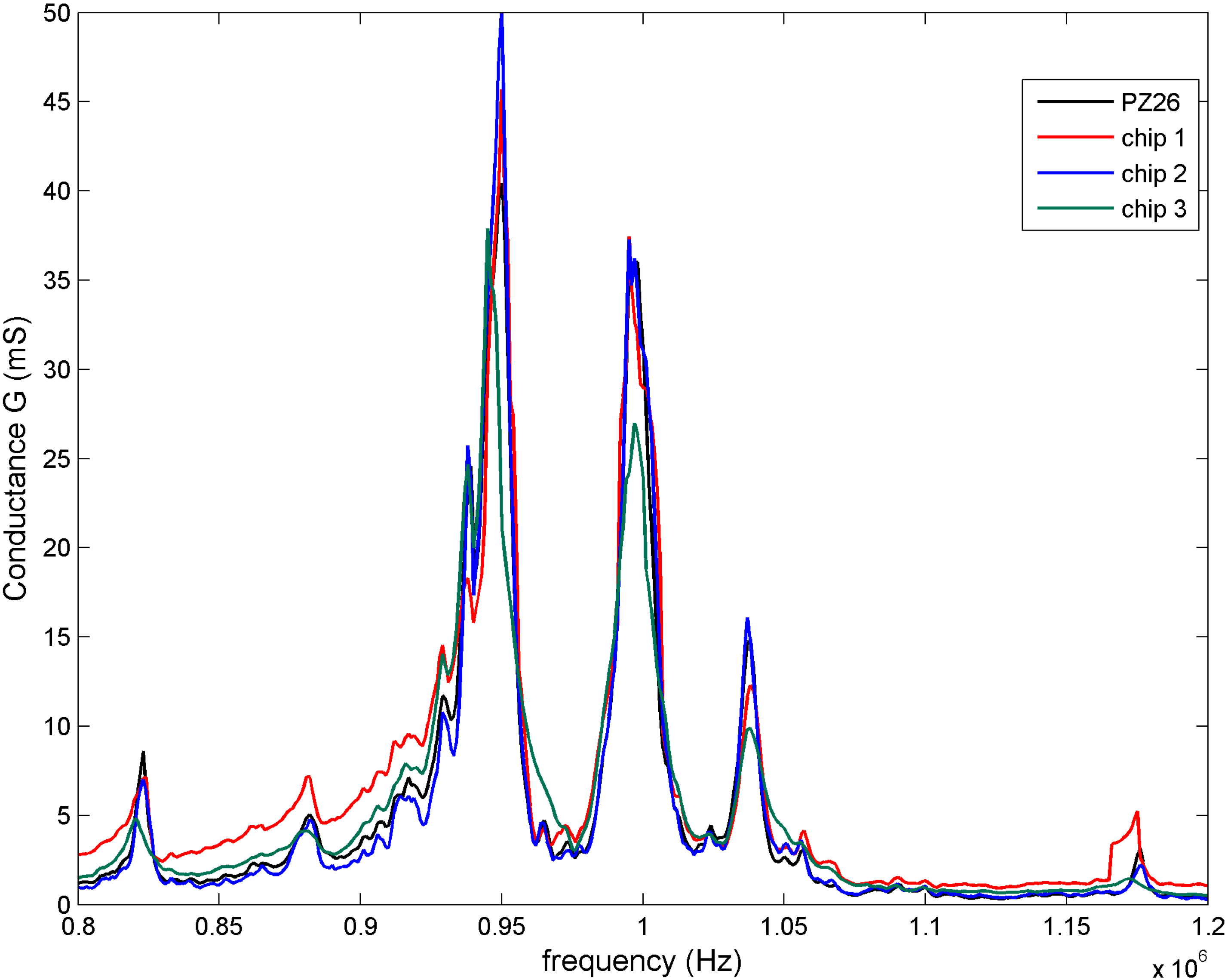
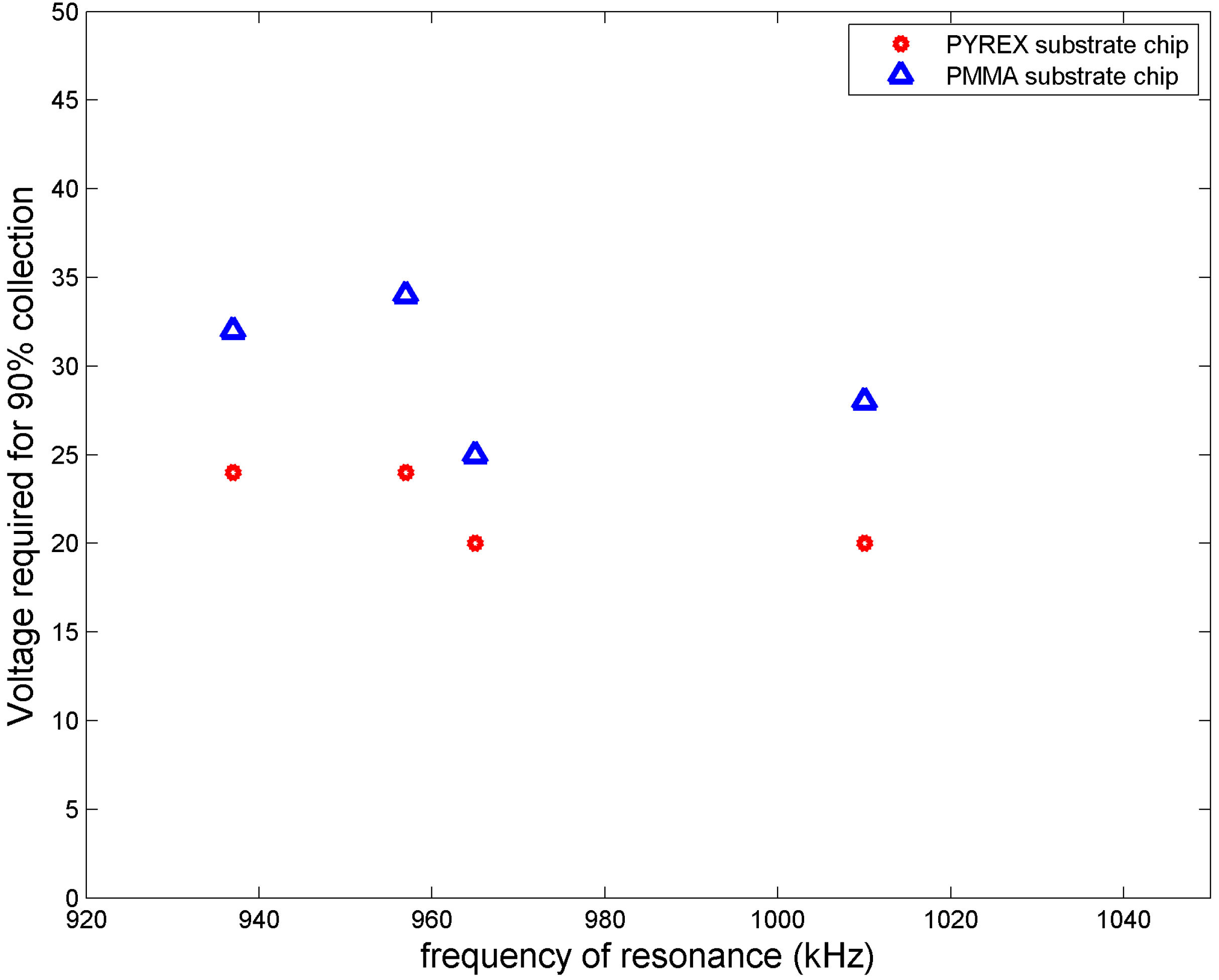
3.1 Electrical Characterization of the Chips

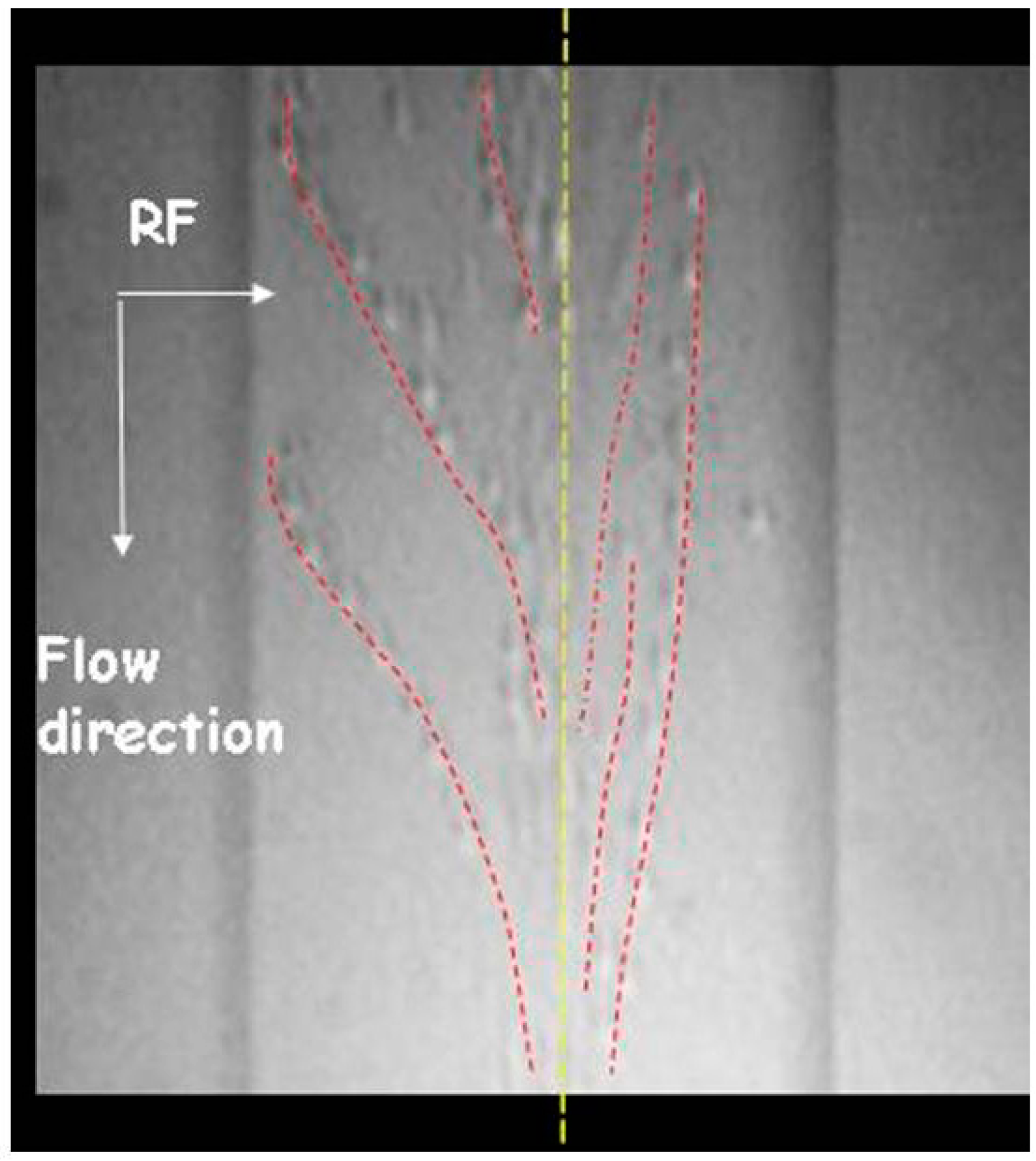
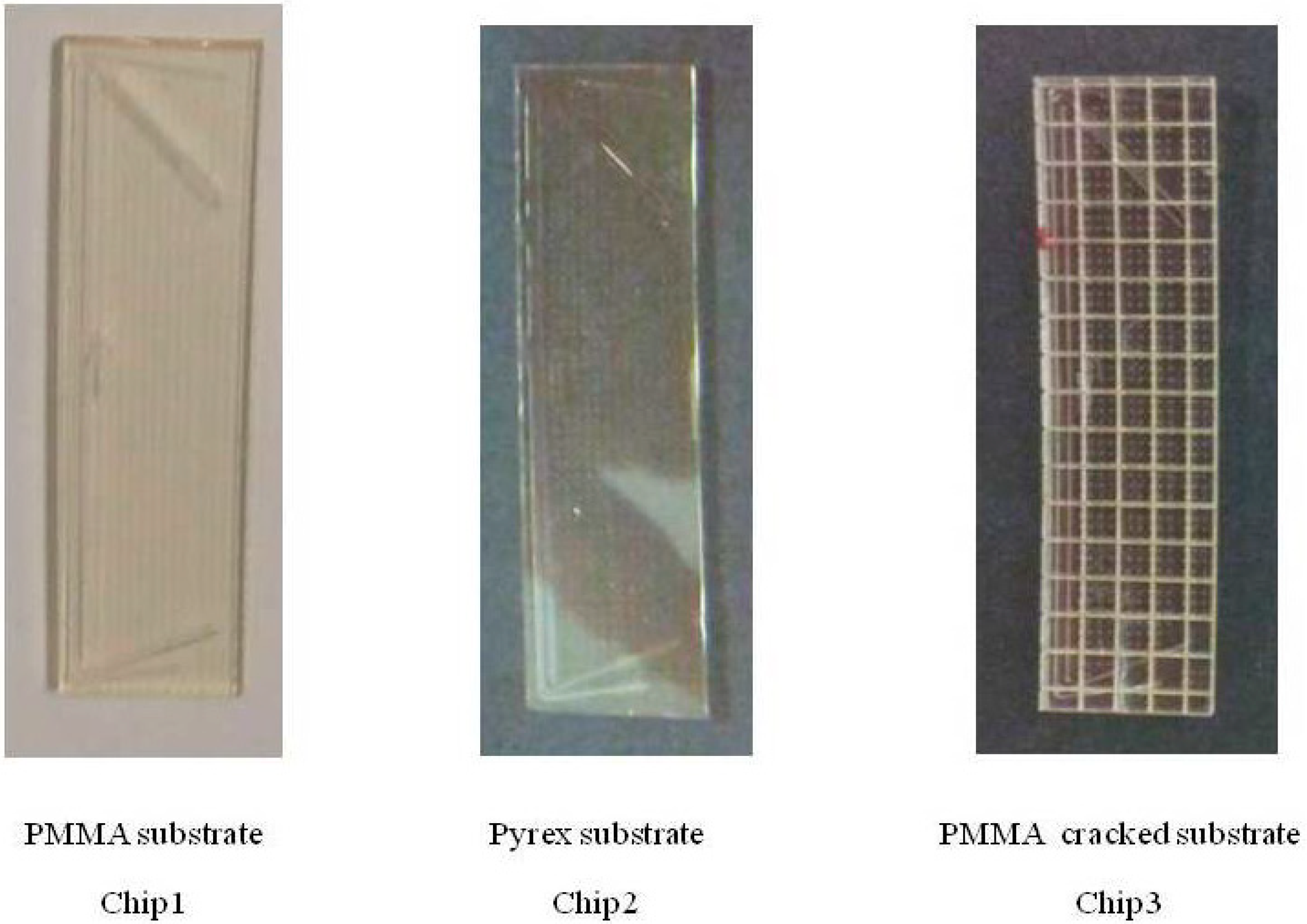
3.2. Mechanical Tests on the Chips







| Frequency (kHz) | Chip | x0 (P = 0) |
|---|---|---|
| 878 kHz | Chip1 | x0 ~ 2w/3 |
| Chip2 | No node | |
| Chip3 | x0 ~ w/3 | |
| 928 kHz | Chip1 | x0 ~ w/3 |
| Chip2 | x0 ~ w/3 | |
| Chip3 | No node | |
| 936 kHz | Chip1 | x0 ~ w/3 |
| Chip2 | x0 ~ w/3 | |
| Chip3 | No node | |
| 952 kHz | Chip1 | x0 ~ w/3 |
| Chip2 | x0 ~ 2w/3 | |
| Chip3 | x0 ~ w/3 | |
| 956 kHz | Chip1 | w/3 <x0 < w/2 |
| Chip2 | w/2 < x0 < 2w/3 | |
| Chip3 | x0 ~ w/3 | |
| 960 kHz | Chip1 | w/2 < x0 < 2w/3 |
| Chip2 | w/2 < x0 < 2w/3 | |
| Chip3 | No node | |
| 965 kHz | Chip1 | w/2 < x0 < 2w/3 |
| Chip2 | w/2 < x0 < 2w/3 | |
| Chip3 | No node | |
| 980 kHz | Chip1 | x0 ~ w/2 |
| Chip2 | No node | |
| Chip3 | No node | |
| 1002 kHz | Chip1 | w/2 < x0 < 2w/3 |
| Chip2 | No node | |
| Chip3 | x0 ~ w/3 | |
| 1006 kHz | Chip1 | w/2 < x0 < 2w/3 |
| Chip2 | w/2 < x0 < 2w/3 | |
| Chip3 | w/3 <x0 < w/2 |
4. Conclusions
Acknowledgments
Author Contributions
Supplementary Materials
Conflicts of Interest
References
- Yamada, M.; Nakashima, M.; Seki, M. Pinched flow fractionation: Continuous size separation of particles utilizing a laminar flow profile in a pinched microchannel. Anal. Chem. 2004, 15, 5465–5471. [Google Scholar] [CrossRef]
- Huang, L.R.; Cox, E.C.; Austin, R.T.H.; Sturm, C. Continuous Particle Separation through Deterministic Lateral Displacement. Science 2004, 304, 987–990. [Google Scholar] [CrossRef] [PubMed]
- Yamada, M.; Seki, M. Hydrodynamic filtration for on-chip particle concentration and classification utilizing microfluidics. Lab Chip 2005, 5, 1233–1239. [Google Scholar] [CrossRef] [PubMed]
- Shevkoplyas, S.S.; Yoshida, T.; Munn, L.L.; Bitensky, M.W. Biomimetic designs of microfluidic device for auto-separation of leukocytes from the whole blood. Anal. Chem. 2005, 77, 933. [Google Scholar] [CrossRef] [PubMed]
- Toner, M.; Irimia, D. Blood on a chip. Rev. Annu. Biomed. Eng. 2005, 7, 77–103. [Google Scholar] [CrossRef]
- Berthier, J.; Silberzan, P. Microfluidics for Biotechnology; Artech House: Boston, MA, USA, 2010. [Google Scholar]
- Yi, C.; Li, C.; Ji, S.; Yang, M. Microfluidics technology for manipulation and analysis of biological cells. Anal. Chim. Acta 2006, 560, 1–23. [Google Scholar] [CrossRef]
- Pamme, N. Continuous flow separations in microfluidic devices. Lab Chip 2007, 7, 1644–1659. [Google Scholar] [CrossRef] [PubMed]
- Sai, Y.; Yamada, M.; Yasuda, M.; Seki, M. Continuous separation of particles using a microfluidic device equipped with flow rate control valves. J. Chromatogr. A 2006, 1127, 214–220. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Cui, D.; Liu, C.; Li, H.; Chen, J. Continuous flow microfluidic device for cell separation, cell lysis and DNA purification. Anal. Chim. Acta 2007, 584, 237–243. [Google Scholar] [CrossRef] [PubMed]
- Nagrath, S.; Sequist, L.V.; Maheswaran, S.; Bell, D.W.; Irimia, D.; Ulkus, L.; Smith, M.R.; Kwak, E.L.; Digumarthy, S.; Muzikansky, A.; Ryan, P.; Balis, U.J.; Tompkins, R.G.; Haber, D.A.; Toner, M. Isolation of rare circulating tumour cells in cancer patients by microchip technology. Nat. Lett. 2007, 450. [Google Scholar] [CrossRef]
- Tan, S.J.; Yobas, L.; Lee, G.Y.H.; Ong, C.N.; Lim, C.T. Microdevice for the isolation and enumeration of cancer cells from blood. Biomed. Microdevices 2009, 11, 883–892. [Google Scholar] [CrossRef] [PubMed]
- Gossett, D.R.; Weaver, W.M.; Mach, A.J.; Hur, S.C.; Tse, H.T.K.; Lee, W.; Amini, H.; Di Carlo, D. Label-free cell separation and sorting in microfluidic systems. Anal. Bioanal. Chem. 2010, 397, 3249–3267. [Google Scholar] [CrossRef] [PubMed]
- Bhagat, A.A.; Bow, H.; Wei Hou, H.; Tan, S.J.; Han, J.; Lim, C.T. Microfluidics for cell separation. Med. Biol. Eng. Comput. 2010, 48, 999–1014. [Google Scholar] [CrossRef] [PubMed]
- Hou, H.W.; Bhagat, A.A.; Lee, W.C.; Huang, S.; Han, J.; Lim, C.T. Microfluidic Devices for Blood Fractionation. Micromachines 2011, 2, 319–343. [Google Scholar] [CrossRef]
- Quek, R.; Le, D.V.; Chiam, K.-H. Separation of deformable particles in deterministic lateral displacement devices. Phys. Rev. E 2011, 83, 056301. [Google Scholar] [CrossRef]
- Yu, M.; Stott, S.; Toner, M.; Maheswaran, S.; Haber, D.A. Circulating tumor cells: Approaches to isolation and characterization. J. Cell Biol. 2011, 192, 373–382. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Cui, D.F.; Liu, C.C.; Li, H. Microfluidic Devices for Blood cell separation and collection based on crosflow filtration. Sens. Actuators B Chem. 2008, 130, 216–221. [Google Scholar] [CrossRef]
- Yu, L.; Ng, S.R.; Xu, Y.; Dong, H.; Wang, Y.J.; Li, C.M. Advances of lab-on-a-chip in isolation, detection and post-processing of circulating tumour cells. Lab Chip 2013, 13, 3163–3182. [Google Scholar] [CrossRef] [PubMed]
- MacDonald, M.P.; Spalding, G.C.; Dholakia, K. Microfluidic sorting in an optical lattice. Nature 2003, 426, 421. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, B.S.; Yang, A.H.J.; Erickson, D.; Lipson, M. Optofluidic trapping and transport on solid core waveguides within a microfluidic device. Opt. Express 2007, 15, 14322–14334. [Google Scholar] [CrossRef] [PubMed]
- Lapizco-Encinas, B.H.; Simmons, B.A.; Cummings, E.B.; Fintschenko, Y. Dielectrophoretic Concentration and Separation of Live and Dead Bacteria in an Array of Insulators. Anal. Chem. 2004, 76, 1571–1579. [Google Scholar] [CrossRef] [PubMed]
- Kang, K.H.; Kang, Y.J.; Xuan, X.C.; Li, D.Q. Continuous separation of microparticles by size with Direct current-dielectrophoresis. Electrophoresis 2006, 27, 694–702. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Tatar, F.; Turmezei, P.; Bastemeijer, J.; Mollinger, J.R.; Piciu, O.; Bossche, A. Continuous Electrodeless Dielectrophoretic Separation in a Circular Channel. J. Phys. 2006, 34, 527–532. [Google Scholar]
- Pysher, M.D.; Hayes, M.A. Electrophoretic and Dielectrophoretic Field Gradient Technique for Separating Bioparticles. Anal. Chem. 2007, 79, 4552–4557. [Google Scholar] [CrossRef] [PubMed]
- Gascoyne, P.R.C.; Gascoyne, P.R.; Noshari, J.; Anderson, T.J.; Becker, F.F. Isolation of rare cells from cell mixtures by Dielectrophoresis. Electrophoresis 2009, 30, 1388–1398. [Google Scholar] [CrossRef] [PubMed]
- Coakley, W.T.; Whitworth, G.; Grundy, M.A.; Gould, R.K.; Allman, R. Ultrasonic manipulation of particles and cells. Bioseparation 1994, 4, 73–83. [Google Scholar] [PubMed]
- Cousins, C.M.; Holownia, P.; Hawkes, J.J.; Limaye, M.S.; Price, C.P. Plasma preparation from whole blood using ultrasound. Ultrasound Med. Biol. 2000, 26, 881–888. [Google Scholar] [CrossRef] [PubMed]
- Hawkes, J.; Coakley, W.T. Force field particle filter combining ultrasound standing waves and laminar flow. Sens. Actuators B Chem. 2001, 75, 213. [Google Scholar] [CrossRef]
- Petersson, F.; Nilsson, A.; Jonsson, H.; Laurell, T. Carrier Medium Exchange through Ultrasonic Particle Switching in Microfluidic Channels. Anal. Chem. 2005, 77, 1216–1221. [Google Scholar] [CrossRef] [PubMed]
- Haake, A.; Neild, A.; Kim, D.; Ihm, J.; Sun, Y.; Dual, J.; Ju, B. Manipulation of cells using an ultrasonic pressure field. Ultrasound Med. Biol. 2005, 31, 857–864. [Google Scholar] [CrossRef] [PubMed]
- Neild, A.; Oberti, S.; Beyeler, F.; Dual, J.; Nelson, B.J. A micro-particle positioning technique combining an ultrasonic manipulator and a microgripper. J. Micromech. Microeng. 2006, 16, 1562–1570. [Google Scholar] [CrossRef]
- Kapishnikov, S.; Kantsler, V.; Steinberg, V. Continuous particle size separation and size sorting using ultrasound in a Microchannel. J. Stat. Mech. Theory Exp. 2006, 2006, P01012. [Google Scholar] [CrossRef]
- Wiklund, M.; Günther, C.; Jäger, M.; Fuhr, G.; Hertz, H.M. Ultrasonic standing wave manipulation technology integrated into a dielectrophoretic chip. Lab Chip 2006, 6, 1537–1544. [Google Scholar] [CrossRef] [PubMed]
- Laurell, T.; Petersson, F.; Nilsson, A. Chip integrated strategies for acoustic separation and manipulation of cells and particles. Chem. Soc. Rev. 2007, 36, 492–506. [Google Scholar] [CrossRef] [PubMed]
- Milne, G.; Rhodes, D.; MacDonald, M.; Dholakia, K. Fractionation of polydisperse colloid with acousto-optically generated potential energy landscapes. Opt. Lett. 2007, 32, 1144–1146. [Google Scholar] [CrossRef] [PubMed]
- Townsend, R.J.; Hill, M.; Harris, N.R.; McDonnell, M.B. Performance of a quarter-wavelength particle concentrator. Ultrasonics 2008, 48, 515–520. [Google Scholar] [CrossRef] [PubMed]
- Oberti, S.; Moeller, D.; Neild, A.; Dual, J.; Beyeler, F.; Nelson, B.; Gutmann, S. Strategies for single particle manipulation using acoustic and flow fields. Ultrasonics 2010, 50, 247–257. [Google Scholar] [CrossRef] [PubMed]
- Courtney, C.; Drinkwater, O.C.; Wilcox, B.W.; Demore, C.; Cochran, S.; Hill, M. Manipulation of microparticles using phase-controllable ultrasonic standing wave. J. Acoust. Soc. Am. 2010, 128, EL195–EL199. [Google Scholar] [CrossRef] [PubMed]
- Franke, T. Surface acoustic wave actuated cell sorting (SAWACS). Lab Chip 2010, 10, 789–794. [Google Scholar] [CrossRef] [PubMed]
- Thalhammer, G.; Steiger, R.; Meinschad, M.; Hill, M.; Bernet, S.; Ritsch-Marte, M. Combined acoustic and optical trapping. Biomed. Opt. Express 2011, 2, 2859. [Google Scholar] [CrossRef] [PubMed]
- Bazou, D.; Castro, A.; Hoyos, M. Controlled Cell aggregation in a pulsed acoustic field. Ultrasonics 2012, 52, 842–850. [Google Scholar] [CrossRef] [PubMed]
- Ding, X.; Lin, S.-C.S.; Kraly, B.; Yue, H.; Li, S.; Chiang, I.-K.; Shi, J.; Benkovic, S.; Huang, T. On-chip manipulation of single microparticles, cells, and organisms using surface acoustic waves. Proc. Nat. Acad. Sci. USA 2012, 109, 11105–11109. [Google Scholar] [CrossRef] [PubMed]
- Glynne-Jones, P.; Hill, M. Acoustic Manipulation combined with other force fields. Lab Chip 2013, 13, 1003–1010. [Google Scholar] [CrossRef] [PubMed]
- González, I.; Fernandez, L.J.; Gomez, T.; Berganzo, J.; Soto, J.L.; Carrato, A. A polymeric chip for micromanipulation and particle sorting by ultrasounds based on a multilayer configuration. Sens. Actuators B Chem. 2010, 144, 310–317. [Google Scholar] [CrossRef]
- González, I.; Fernandez, L.J.; Gomez, T.; Soto, J.L.; Martin, A.; Berganzo, J. Ultrasonic extraction of circulating tumor cells from peripheral blood- a noninvasive method to keep the cells viable for later biomolecular analysis. In Proceedings of the 2011 6th International Conference on Microtechnologies in Medicine and Biology (MMB2011), Luzern, Switzerland, 3–5 April 2011; pp. 60–61.
- Harris, N.; Hill, M.; Keating, A.; Baylac-Choulet, P. A lateral mode flow-through PMMA ultrasonic separator. Int. J. Appl. Biomed. Eng. 2012, 5, 8. [Google Scholar]
- Mueller, A.; Lever, A.; Nguyen, T.V.; Comolli, J.; Fiering, J. Continuous acoustic separation in a thermoplastic microchannel. J. Micromech. Microeng. 2013, 23, 125006. [Google Scholar] [CrossRef]
- Gor’kov, L.P. On the forces acting on a small particle in an acoustical field in an ideal fluid. Sov. Phys. Dokl. 1962, 6, 773–775. [Google Scholar]
- Martinez-Duarte, R.; Madou, M.J. SU-Photolithography and Its Impact on Microfluidics. In Microfluidics and Nanofluidics Handbook; Mitra, S.K., Chakraborty, S., Eds.; CRC Press: Boca Raton, FL, USA, 2012; Chapter 8; pp. 231–268. [Google Scholar]
- SU-8 2000. Available online: http://www.microchem.com/pdf/SU-82000DataSheet2000_5thru2015Ver4.pdf (accessed on 21 July 2011).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
González, I.; Tijero, M.; Martin, A.; Acosta, V.; Berganzo, J.; Castillejo, A.; Bouali, M.M.; Soto, J.L. Optimizing Polymer Lab-on-Chip Platforms for Ultrasonic Manipulation: Influence of the Substrate. Micromachines 2015, 6, 574-591. https://doi.org/10.3390/mi6050574
González I, Tijero M, Martin A, Acosta V, Berganzo J, Castillejo A, Bouali MM, Soto JL. Optimizing Polymer Lab-on-Chip Platforms for Ultrasonic Manipulation: Influence of the Substrate. Micromachines. 2015; 6(5):574-591. https://doi.org/10.3390/mi6050574
Chicago/Turabian StyleGonzález, Itziar, María Tijero, Alain Martin, Victor Acosta, Javier Berganzo, Adela Castillejo, Mounir M. Bouali, and Jose Luis Soto. 2015. "Optimizing Polymer Lab-on-Chip Platforms for Ultrasonic Manipulation: Influence of the Substrate" Micromachines 6, no. 5: 574-591. https://doi.org/10.3390/mi6050574