Friction Reduction for a Rotational Gyroscope with Mechanical Support by Fabrication of a Biomimetic Superhydrophobic Surface on a Ball-Disk Shaped Rotor and the Application of a Water Film Bearing

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Fabrication of the Superhydrophobic Surface
2.3. Characterization Method
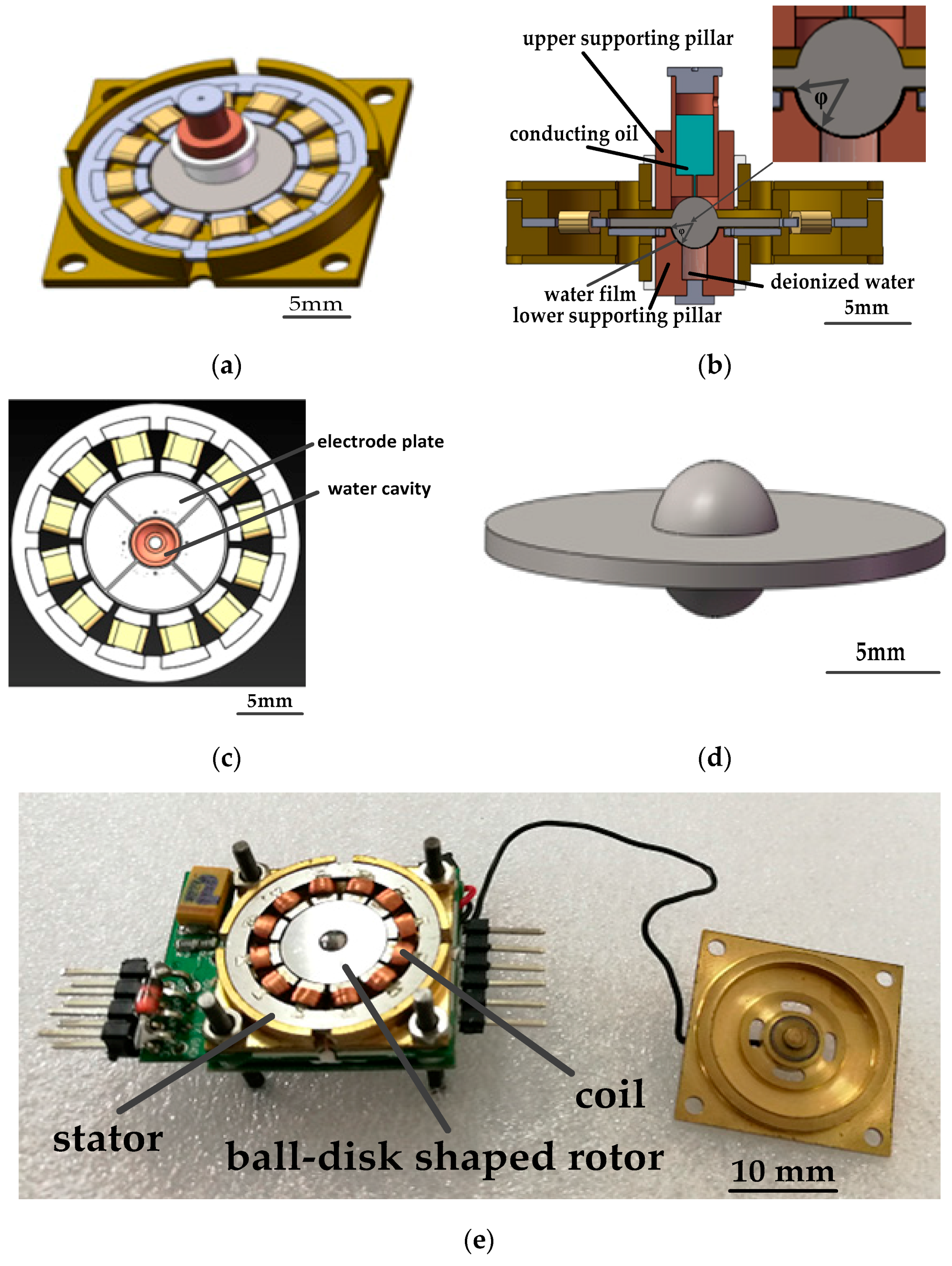
2.4. Gyroscope Structure
3. Result and Discussion
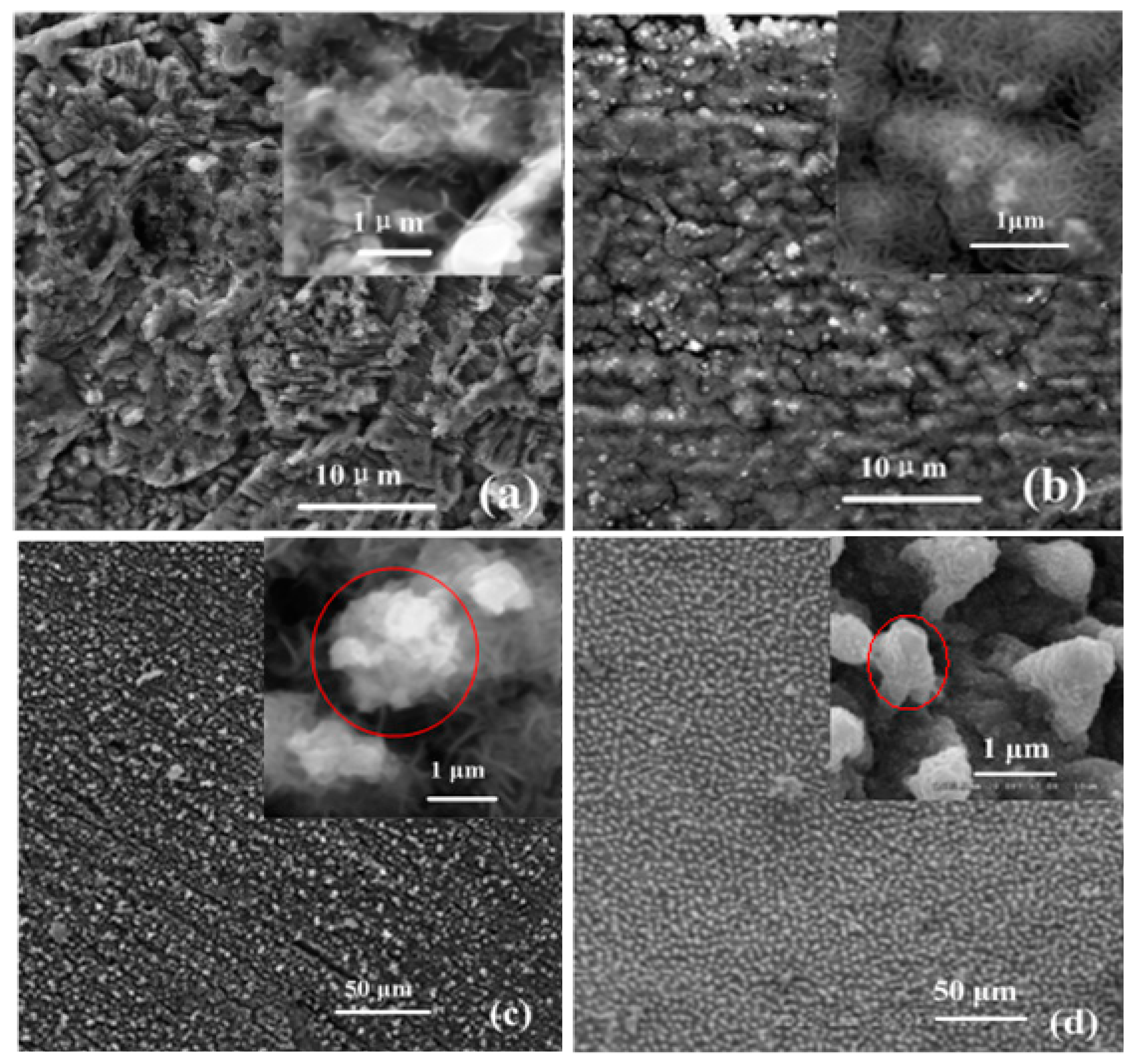
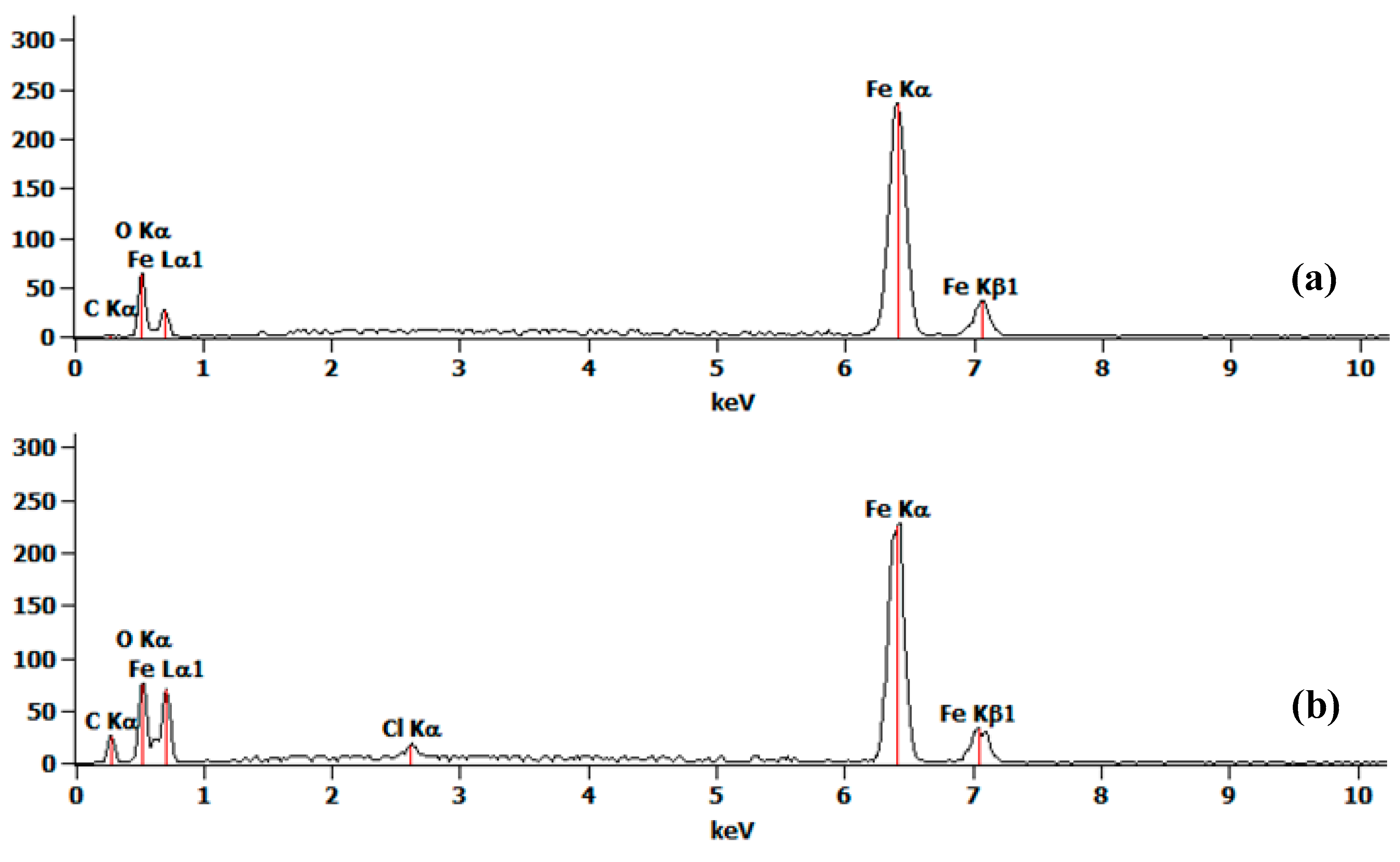
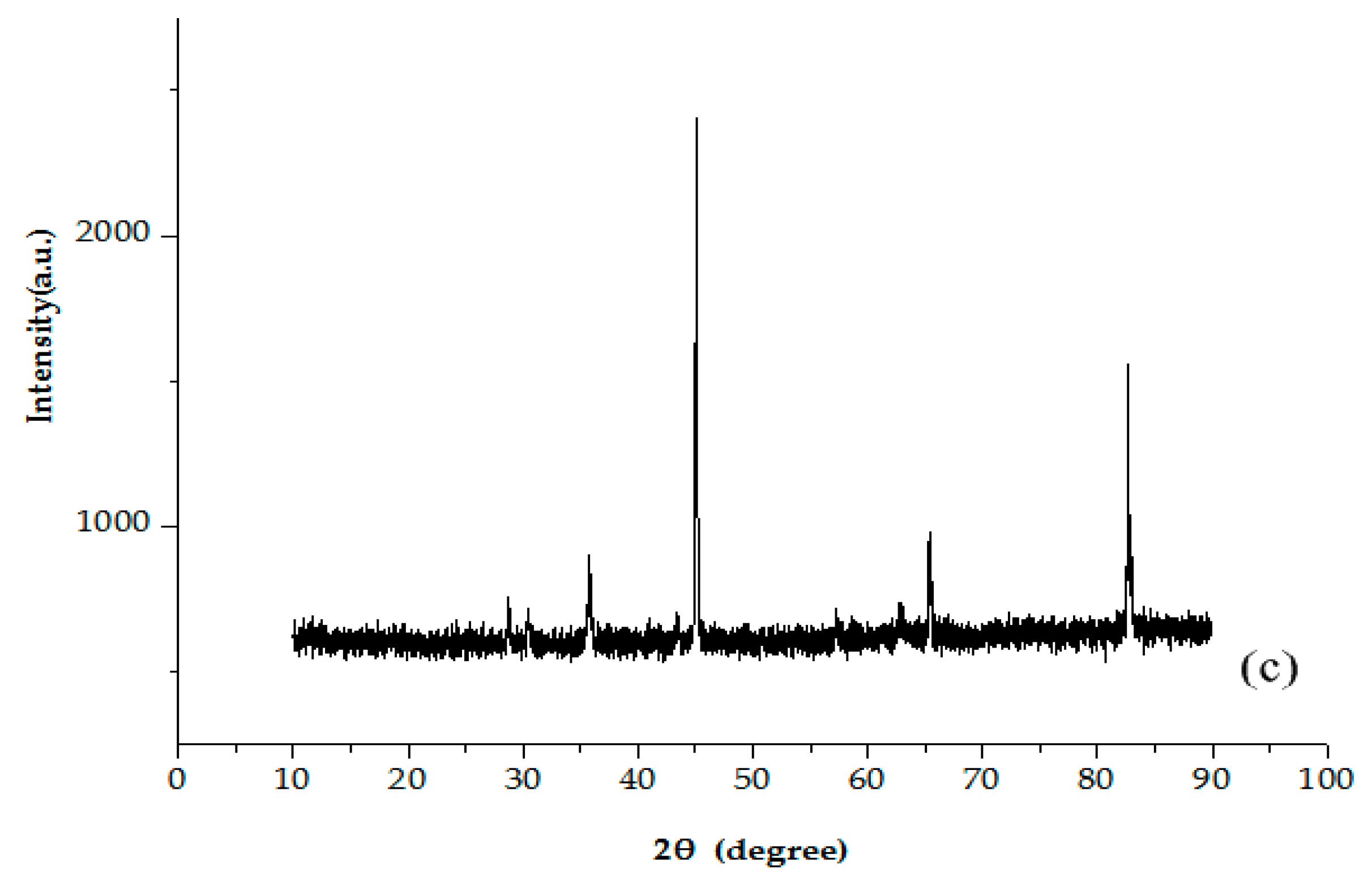
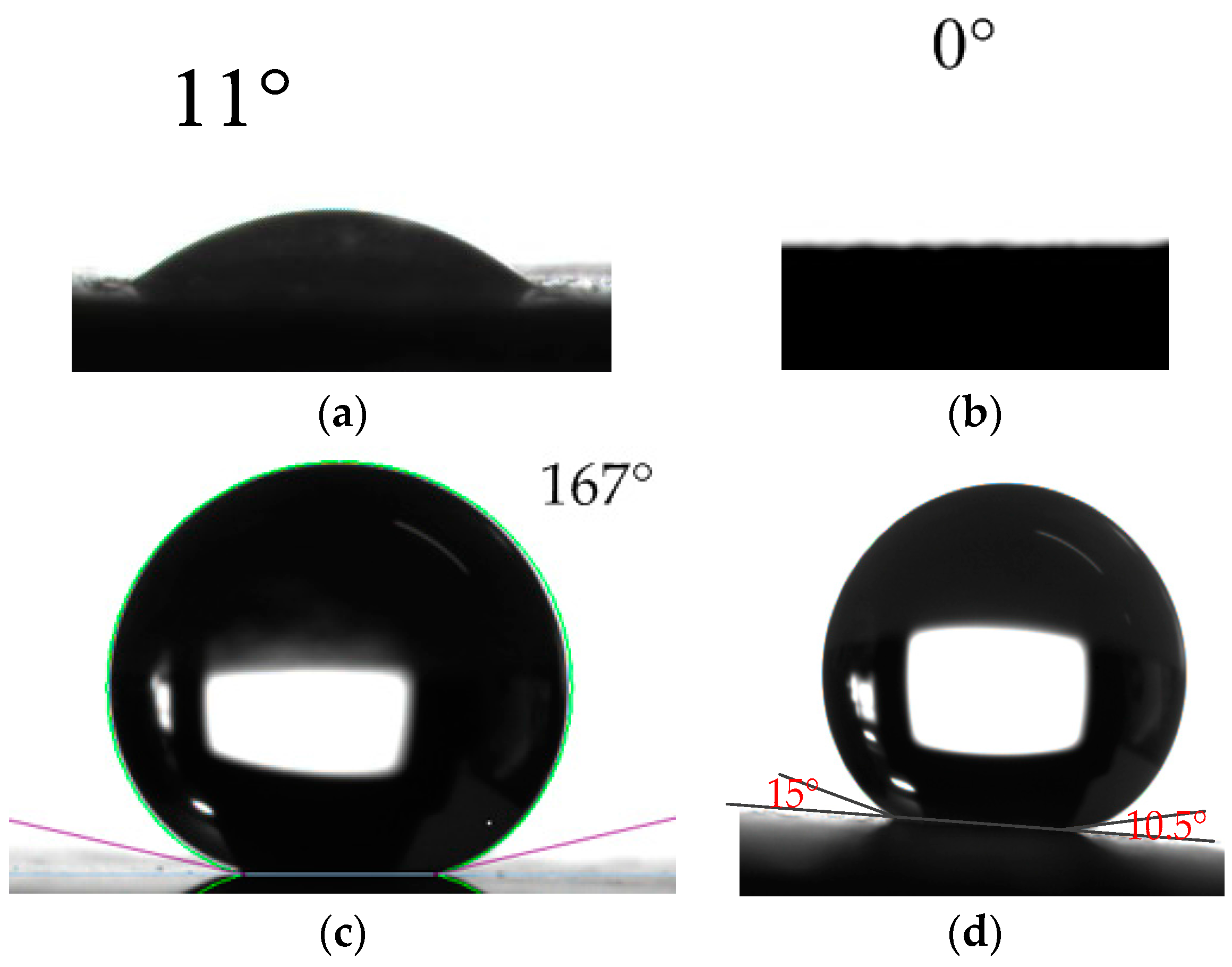
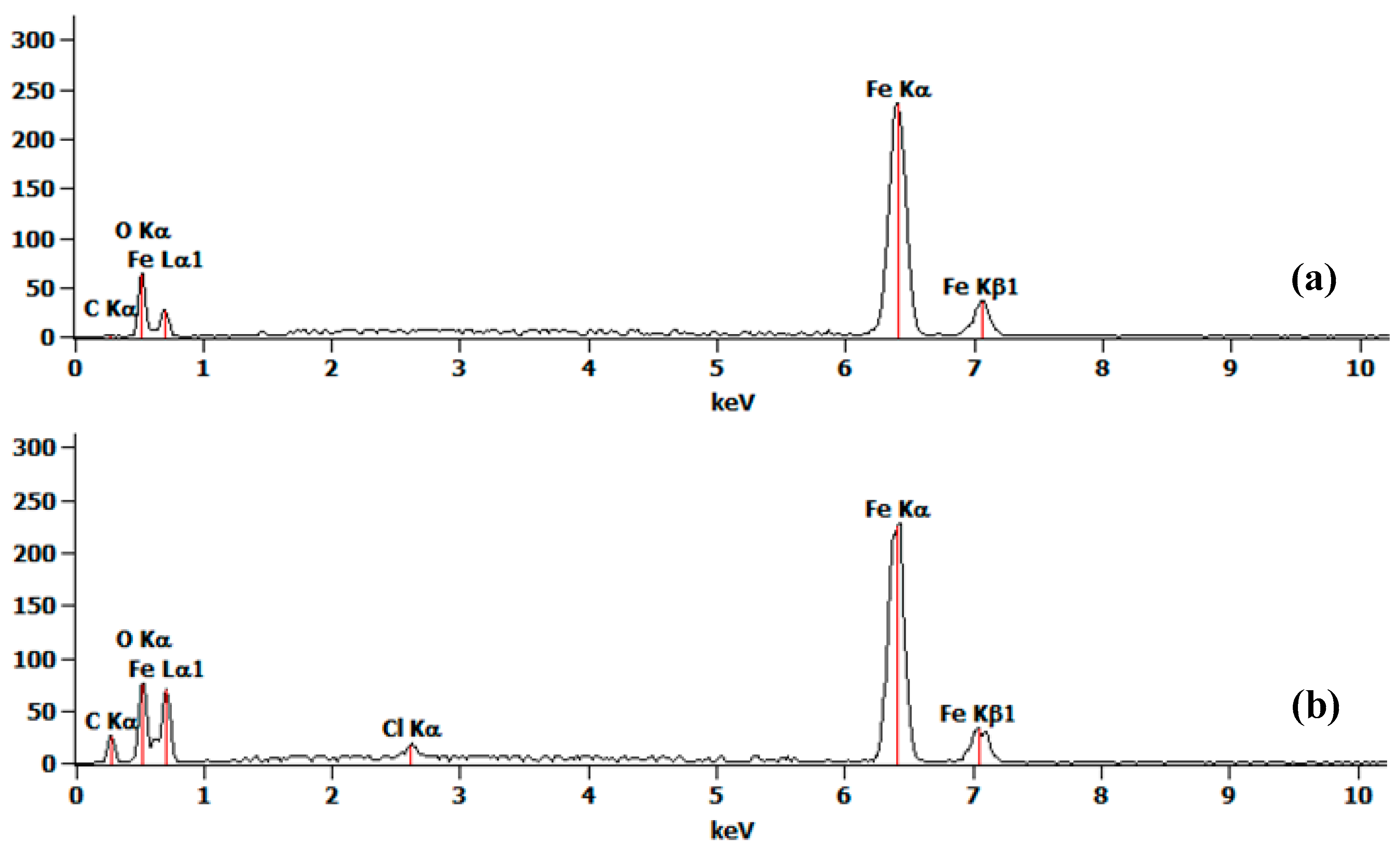
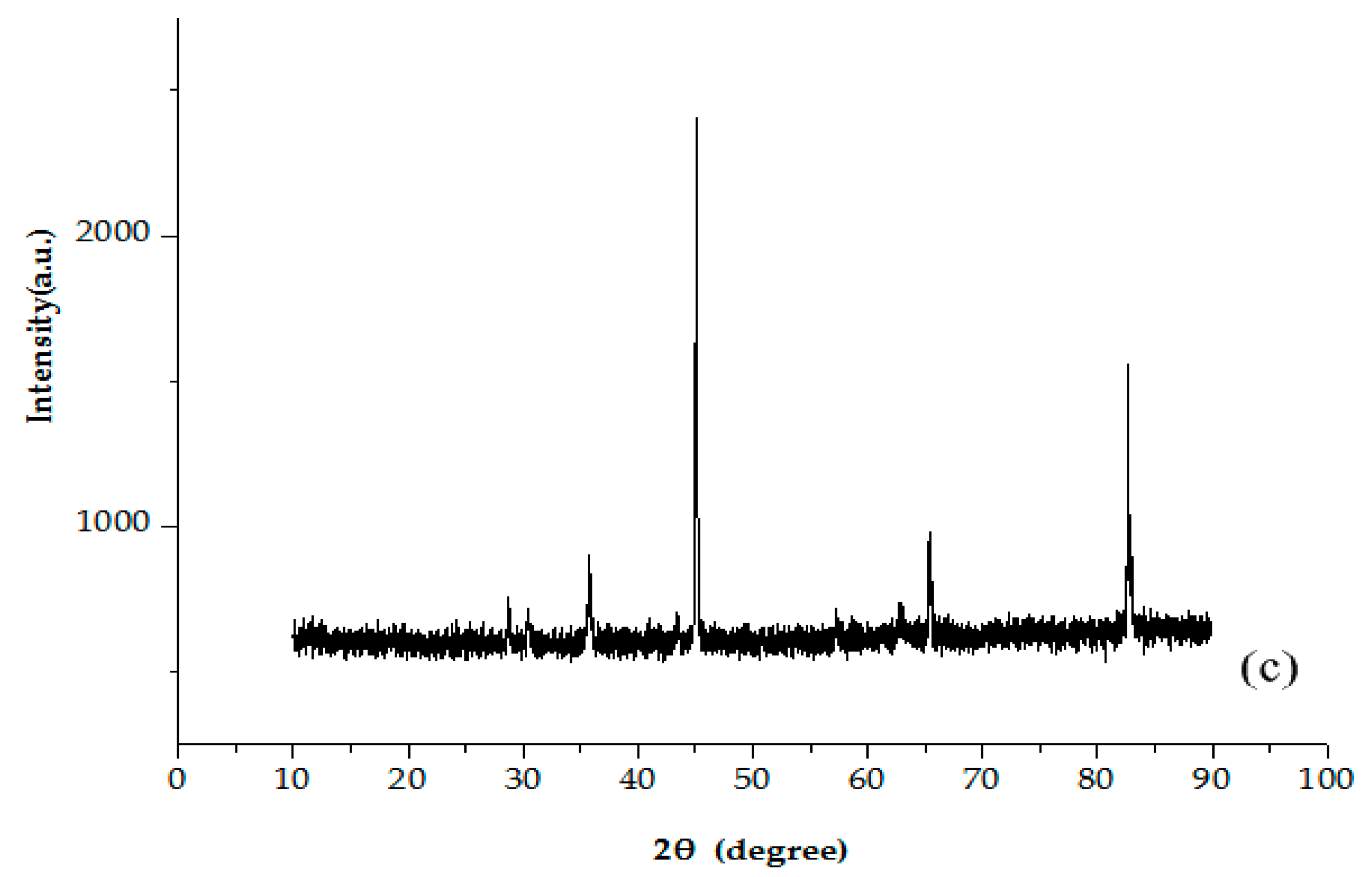
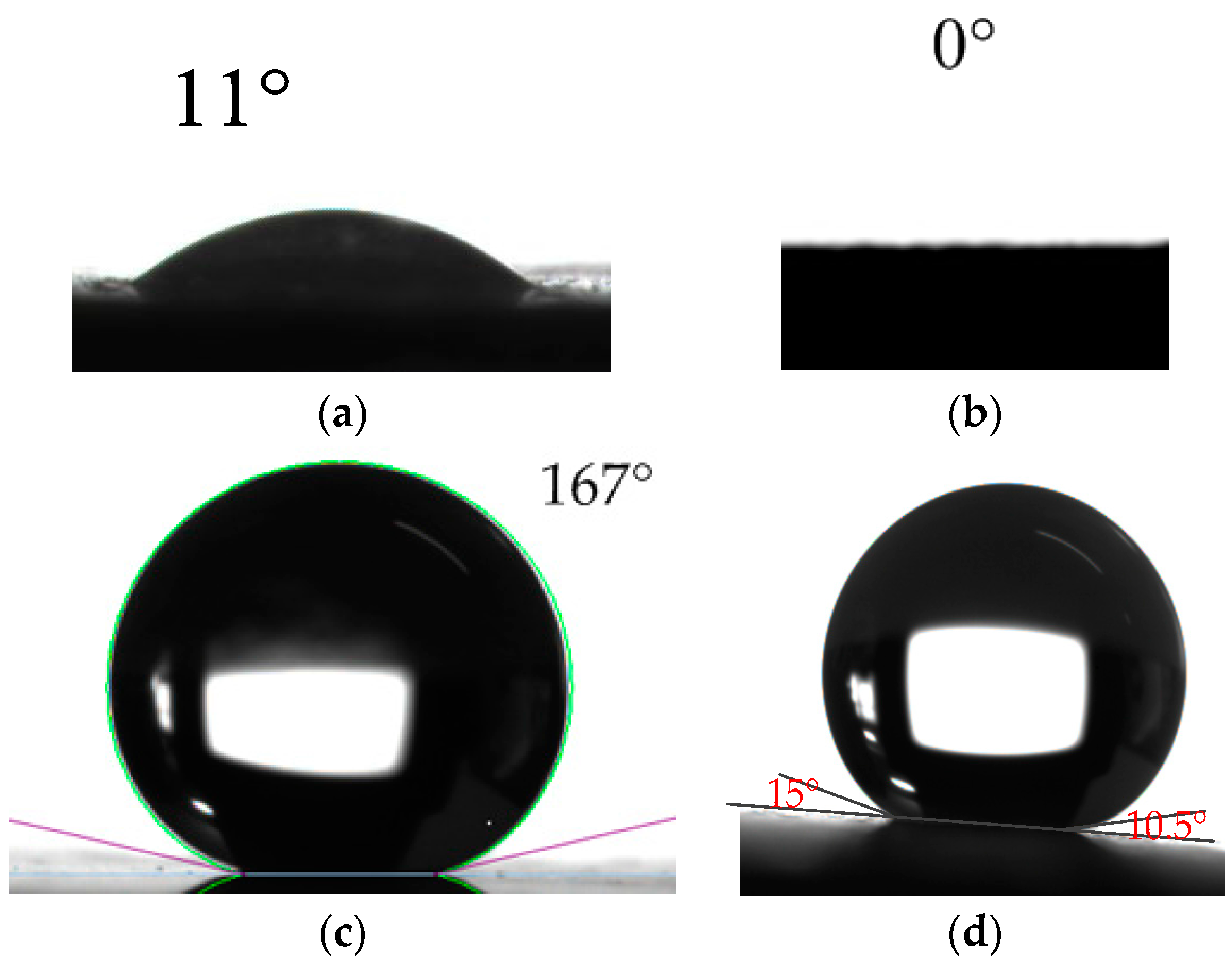
3.1. Characterization
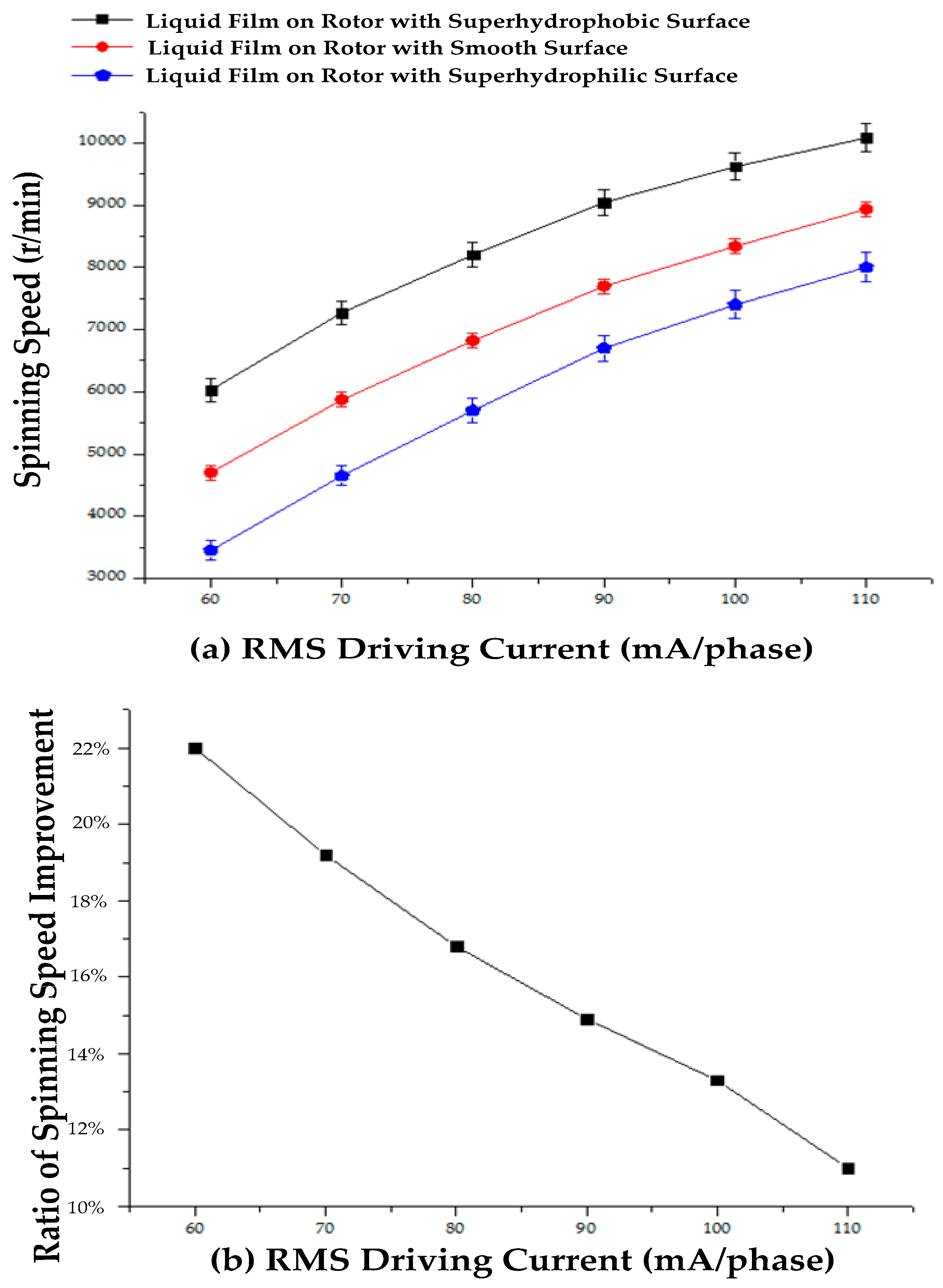
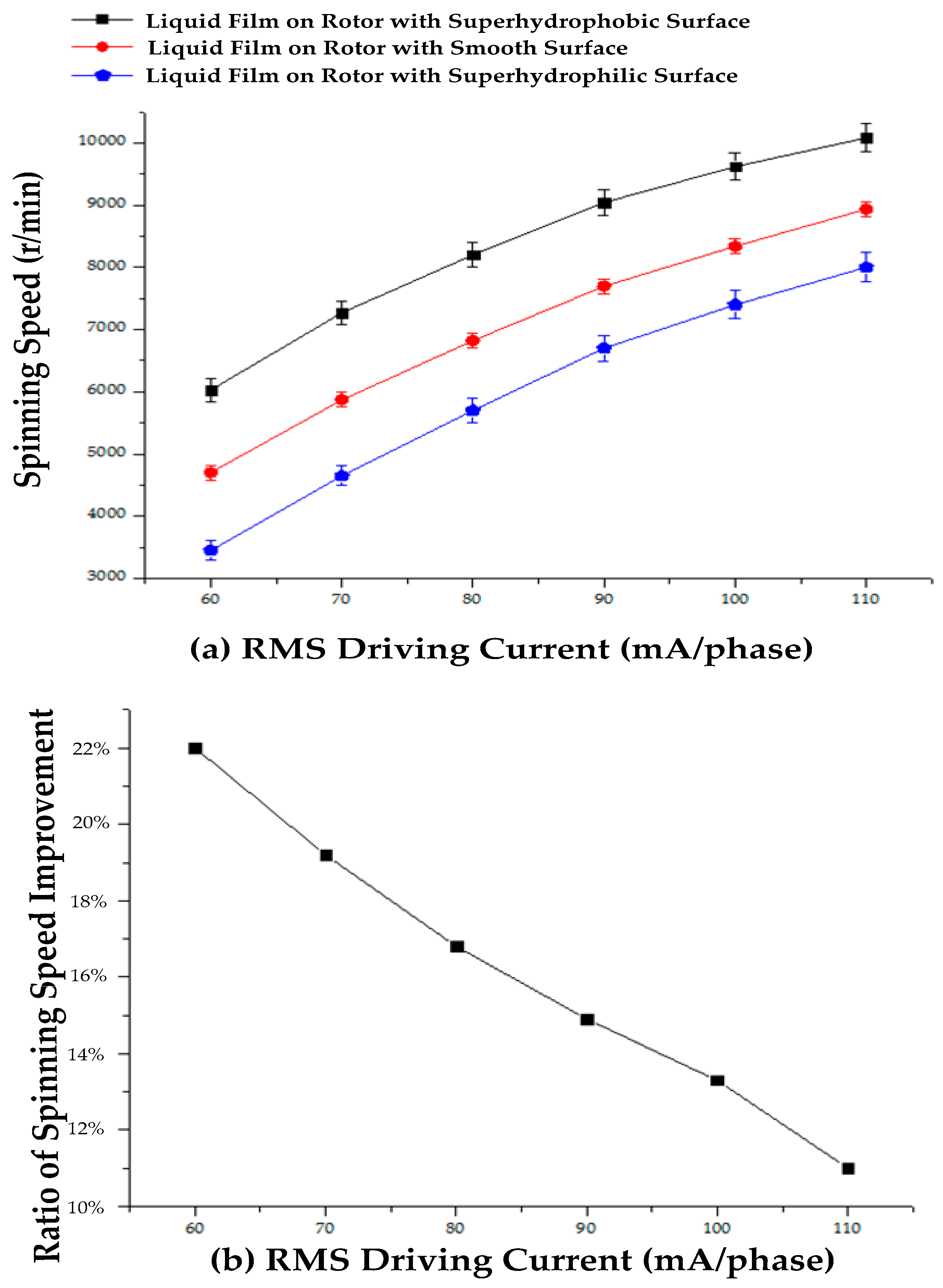
3.2. Increase of the Rated Spinning Speed by the Superhydrophobic Surface
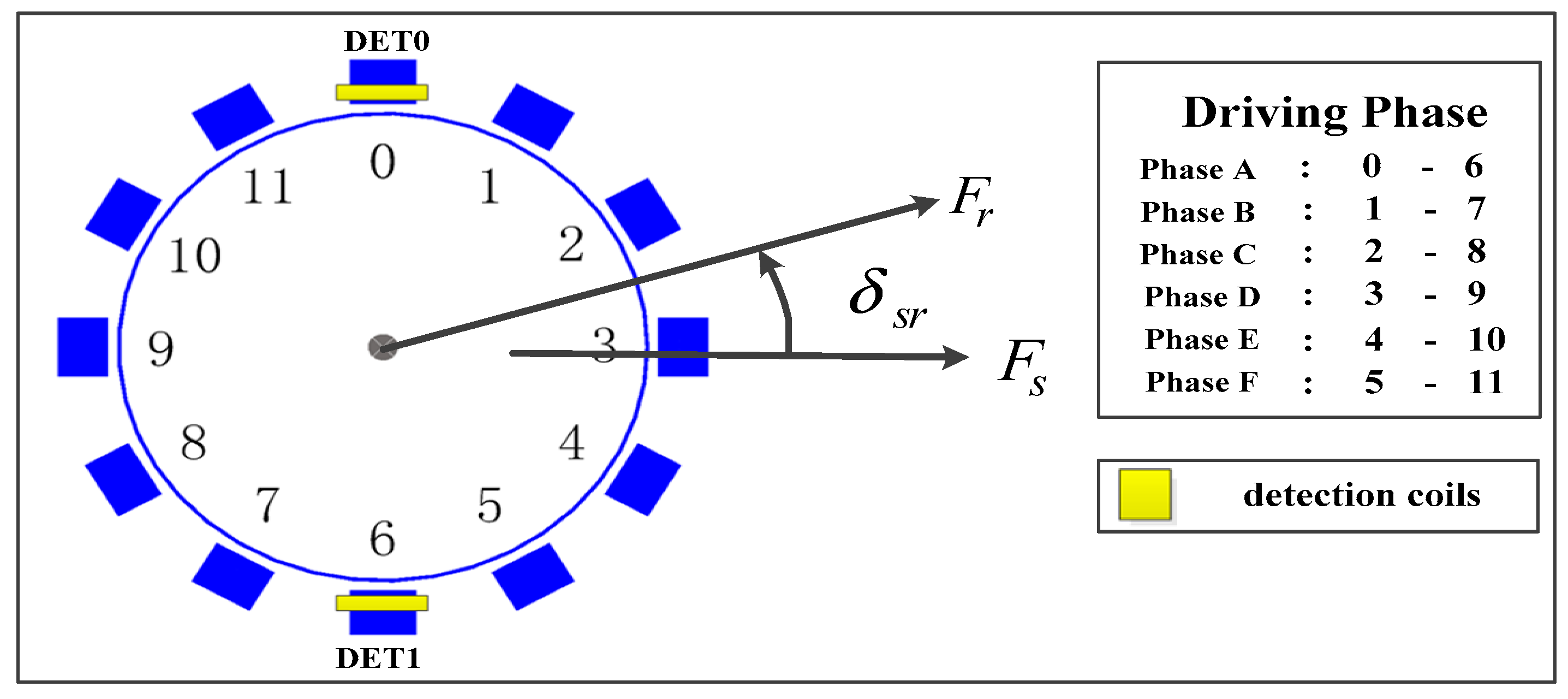
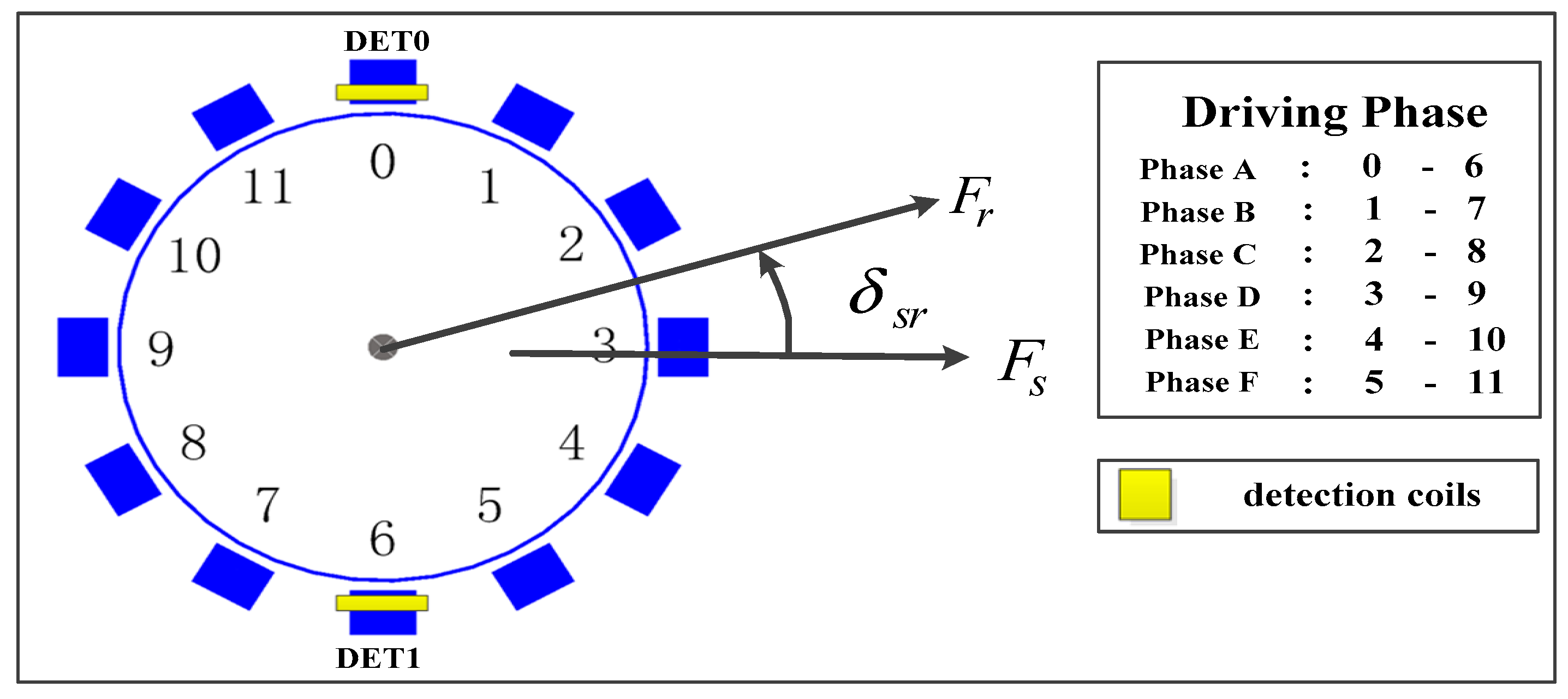
3.3. Gyroscope Operational Principle and Performance Improvement
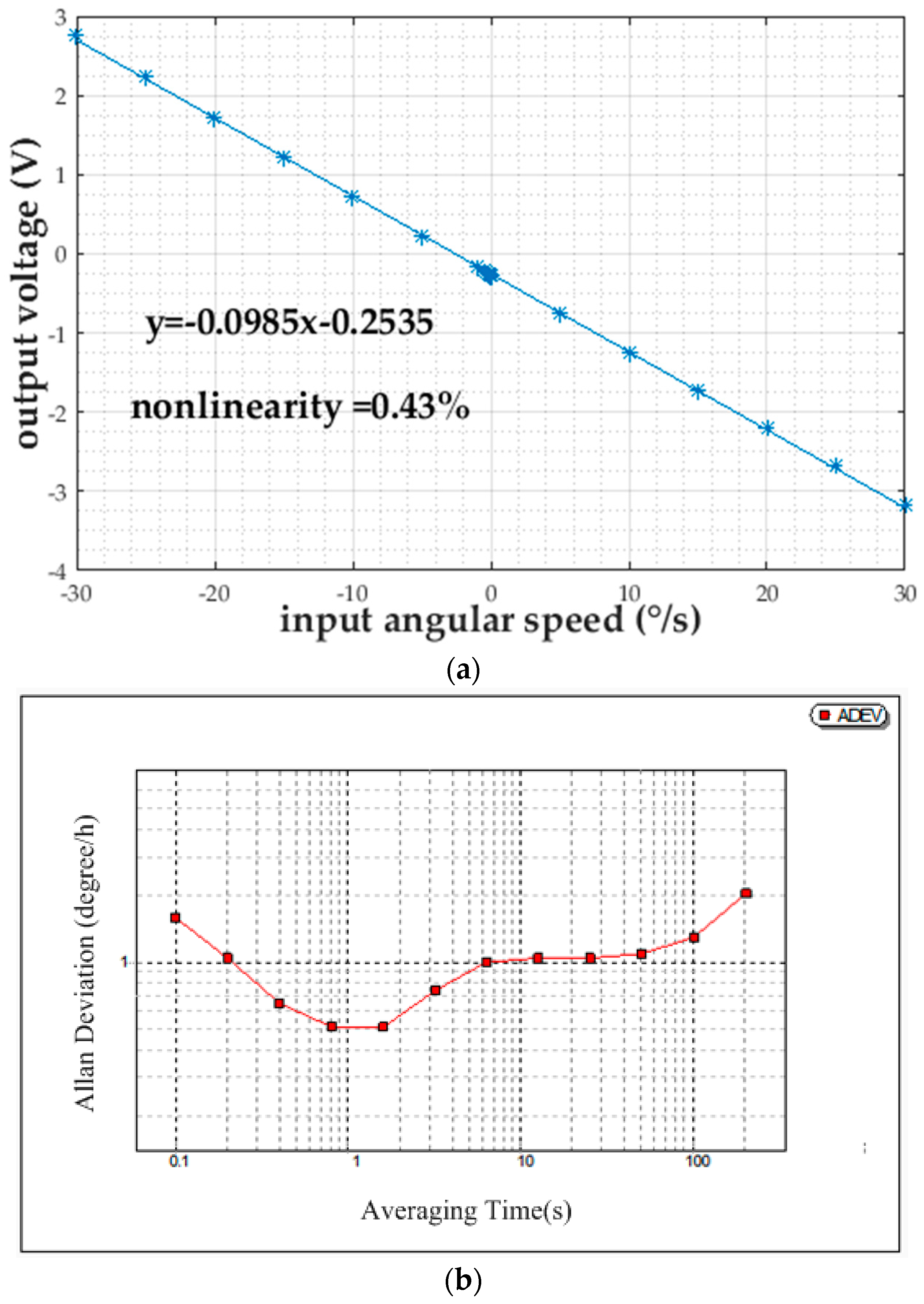
3.4. Gyroscope Performance Parameters
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xia, D.; Yu, C.; Kong, L. The development of Micromachined Gyroscope Structure and Circuitry Technology. Sensors 2014, 14, 1394–1473. [Google Scholar] [PubMed]
- Liu, K.; Zhang, W.; Chen, W.; Li, K.; Dai, F.; Cui, F.; Wu, X.; Ma, G.; Xiao, Q. The development of micro-gyroscope technology. J. Micromech. Microeng. 2009, 19, 113001. [Google Scholar] [CrossRef]
- Shearwood, C.; Williams, C.B.; Mellor, P.H.; Yates, R.B.; Gibbs, M.R.J.; Mattingley, A.D. Levitation of a micromachined rotor for application in a rotating gyroscope. Electron. Lett. 1995, 31, 1845–1846. [Google Scholar] [CrossRef]
- Shearwood, C.; Ho, K.Y.; Williams, C.B.; Gong, H. Development of a levitated micromotor for application as a gyroscope. Sens. Actuators A Phys. 2000, 83, 85–92. [Google Scholar] [CrossRef]
- Liu, W.; Chen, W.Y.; Zhang, W.P.; Huang, X.G.; Zhang, Z.R. Variable-capacitance micromotor with levitated diamagnetic rotor. Electron. Lett. 2008, 44, 681–683. [Google Scholar] [CrossRef]
- Dauwalter, C.R.; Ha, J.C. A high performance magnetically suspended MEMS spinning wheel gyro. In Proceedings of the Position Location and Navigation Symposium, Monterey, CA, USA, 26–29 April 2004; pp. 70–77. [Google Scholar]
- Dauwalter, C.R.; Ha, J.C. Magnetically suspended MEMS spinning wheel gyro. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 21–26. [Google Scholar] [CrossRef]
- Murakoshi, T.; Endo, Y.; Fukatsu, K.; Nakamura, S.; Esashi, M. Electrostatically Levitated Ring-Shaped Rotational-Gyro/Accelerometer. Jpn. J. Appl. Phys. 2003, 42, 2468–2472. [Google Scholar] [CrossRef]
- Han, F.T.; Liu, Y.F.; Wang, L.; Ma, G.Y. Micromachined electrostatically suspended gyroscope with a spinning ring-shaped rotor. J. Micromech. Microeng. 2012, 22, 1–9. [Google Scholar] [CrossRef]
- Damrongsak, B.; Kraft, M. A Micromachined electrostatically suspended gyroscope with digital force feedback. In Proceedings of the 4th IEEE Conference on Sensors, Irvine, CA, USA, 31 October–3 November 2005; pp. 401–405. [Google Scholar]
- Damrongsak, B.; Kraft, M. Design and simulation of a micromachined electrostatically suspended gyroscope. In Proceedings of the Institution of Engineering and Technology Seminar on MEMS Sensors and Actuators, ICEPT, Shanghai, China, 26–29 August 2006; pp. 267–272. [Google Scholar]
- Kraft, M.; Farooqui, M.M.; Evans, A.G.R. Modelling and design of an electrostatically levitated disc for inertial sensing applications. J. Micromech. Microeng. 2001, 11, 423–427. [Google Scholar] [CrossRef]
- Cui, F.; Liu, W.; Chen, W.-Y.; Zhang, W.-P.; Wu, X.-S. Hybrid microfabrication and 5-DOF levitation of micromachined electrostatically suspended gyroscope. Electron. Lett. 2011, 47, 976–978. [Google Scholar] [CrossRef]
- Mo, B.; Liu, X.W.; Ding, X.W.; Tan, X.Y. A novel closed-loop drive circuit for the micromechined gyroscope. In Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 3384–3390. [Google Scholar]
- Wu, H.M.; Yang, H.G.; Yin, T.; Zhang, H. Stability analysis of MEMS gyroscope drive loop based on CPPLL. In Proceedings of the 2011 Asia Pacific Conference on Microelectronics and Electronics, Macao, China, 6–7 October 2011; pp. 45–48. [Google Scholar]
- Feng, L.H.; Zhang, Z.X.; Sun, Y.N.; Cui, F. Differential pickup circuit design of a kind of Z-axis MEMS quartz gyroscope. Procedia Eng. 2011, 15, 999–1003. [Google Scholar] [CrossRef]
- Fang, R.; Lu, W.G.; Tao, T.T.; Wang, G.N.; Chen, Z.J.; Zhang, Y.C.; Yu, D.S. A control and readout circuit with capacitive mismatch auto-compensation for MEMS vibratory gyroscope. In Proceedings of the 11th IEEE International Conference on Solid-State and Integrated Circuit Technology (ICSICT), Xi’an, China, 29 October–1 November 2012; pp. 1–3. [Google Scholar]
- Aaltonen, L.; Halonen, K.A.I. An analog drive loop for a capacitive MEMS gyroscope. Analog. Integr. Circuit Signal 2010, 63, 465–476. [Google Scholar] [CrossRef]
- Cui, J.; Chi, X.Z.; Ding, H.T.; Lin, L.T.; Yang, Z.C.; Yan, G.Z. Transient response and stability of the AGC-PI closed-loop controlled MEMS vibratory gyroscopes. J. Micromech. Microeng. 2009, 12, 1–17. [Google Scholar] [CrossRef]
- Yang, B.; Zhou, B.L.; Wang, S.R. A precision closed-loop driving scheme of silicon micromachined vibratory gyroscope. J. Phys. Conf. Ser. 2006, 34, 57–64. [Google Scholar] [CrossRef]
- Xiao, Q.; Luo, Z. Initial levitation of micromachined electrostatically suspended gyroscope with fuzzy hybrid PI controller. In Proceedings of the Internatioal Conference on Control, Automation, Robotics & Vision, Phuket, Thailand, 13–15 November 2016. [Google Scholar]
- Yoxall, B.E.; Chan, M.; Harake, R.S.; Horsley, D.A. Rotary liquid droplet microbearing. J. Microelectromech. Syst. 2012, 21, 721–729. [Google Scholar] [CrossRef]
- Sun, G.; Liu, T.; Sen, P.; Shen, W.; Gudeman, C.; Kim, C.J. Electrostatic side-drive rotary stage on liquid-ring bearing. J. Microelectromech. Syst. 2014, 23, 147–156. [Google Scholar] [CrossRef]
- Takei, A.; Matsumoto, K.; Shomoyama, I. Capillary motor driven by electrowetting. Lab Chip 2010, 10, 1781–1786. [Google Scholar] [CrossRef] [PubMed]
- Wegst, U.G.K.; Bai, H.; Saiz, E.; Tomsia, A.P.; Ritchie, R.O. Bioinspired structural materials. Nat. Mater. 2015, 14, 23–36. [Google Scholar] [PubMed]
- Barthlott, W.; Neinhuis, C. Purity of the sacred lotus, or escape from contamination in biological surfaces. Planta 1997, 202, 1–8. [Google Scholar] [CrossRef]
- Darmanin, T.; Guittard, F. Recent advances in the potential applications of bioinspired superhydrophobic materials. J. Mater. Chem. A 2014, 2, 16319–16359. [Google Scholar]
- Kang, Z.; Li, W. Facile and fast fabrication of superhydrophobic surface on magnesium alloy by one-step electrodeposition method. J. Micromech. Microeng. 2017, 50, 50–56. [Google Scholar]
- He, G.; Lu, S.; Xu, W.; Yu, J.; Wu, B.; Cui, S. Fabrication of durable superhydrophobic electrodeposited tin surfaces with tremella-like structure on copper substrate. Surf. Coat. Technol. 2017, 309, 590–599. [Google Scholar] [CrossRef]
- Steven, K.A.; Crockett, J.; Maynes, D.R.; Lverson, B.D. Two-phase flow pressure drop in superhydrophobic channels. Int. J. Heat Mass Transf. 2015, 110, 515–522. [Google Scholar] [CrossRef]
- Taghvaei, E.; Moosavi, A.; Nouri-Borujerdi, A.; Daeian, MA; Vafaeinejad, S. Superhydrophobic surfaces with a dual-layer micro- and nanoparticle coating for drag reduction. Energy 2017, 125, 1–10. [Google Scholar] [CrossRef]
- Kim, J.H.; Rothstein, J.P. Role of interface shape on the laminar flow through an array of superhydrophobic pillars. Microfluid. Nanofluid. 2017, 21. [Google Scholar] [CrossRef]
- Watanabe, S.; Mamori, H.; Fukagata, K. Drag-reducing performance of obliquely aligned superhydrophobic surface in turbulent channel flow. Fluid Dyn. Res. 2017, 49, 25501. [Google Scholar] [CrossRef]
- Ensikat, H.J.; Ditschekuru, P.; Neinhuis, C.; Barthlott, W. Superhydrophobicity in perfection: the outstanding properties of the lotus leaf. Beilstein J. Nanotechnol. 2011, 2, 152–161. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Wang, X.; Ji, H. Fabrication of lotus-leaf-like superhydrophobic surfaces via Ni-based nano-composite electro-brush plating. Appl. Surf. Sci. 2014, 288, 341–348. [Google Scholar] [CrossRef]
- Fitzgerald, A.E.; Kingsley, C.; Umans, S.D. Electric Machinery, 4rd ed.; McGraw-Hill: New York, NY, USA, 1983; pp. 387–420. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance | Value (Unit) |
|---|---|
| Measurement Range | −30°/s~30°/s |
| Scale Factor | 0.0985 V/(°/s) |
| Nonlinearity | 0.43% |
| Resolution | 0.1°/s |
| Bias Stability | 0.5°/h |
| Settling Time | 0.1 s |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, D.; Liu, X.; Zhang, H.; Li, H.; Weng, R.; Li, L.; Zhang, Z. Friction Reduction for a Rotational Gyroscope with Mechanical Support by Fabrication of a Biomimetic Superhydrophobic Surface on a Ball-Disk Shaped Rotor and the Application of a Water Film Bearing. Micromachines 2017, 8, 223. https://doi.org/10.3390/mi8070223
Chen D, Liu X, Zhang H, Li H, Weng R, Li L, Zhang Z. Friction Reduction for a Rotational Gyroscope with Mechanical Support by Fabrication of a Biomimetic Superhydrophobic Surface on a Ball-Disk Shaped Rotor and the Application of a Water Film Bearing. Micromachines. 2017; 8(7):223. https://doi.org/10.3390/mi8070223
Chicago/Turabian StyleChen, Dianzhong, Xiaowei Liu, Haifeng Zhang, Hai Li, Rui Weng, Ling Li, and Zhongzhao Zhang. 2017. "Friction Reduction for a Rotational Gyroscope with Mechanical Support by Fabrication of a Biomimetic Superhydrophobic Surface on a Ball-Disk Shaped Rotor and the Application of a Water Film Bearing" Micromachines 8, no. 7: 223. https://doi.org/10.3390/mi8070223