Encapsulation of Piezoelectric Transducers for Sensory Augmentation and Substitution with Wearable Haptic Devices

 ,
,  ,
,
Abstract
:
1. Introduction
2. Materials and Methods
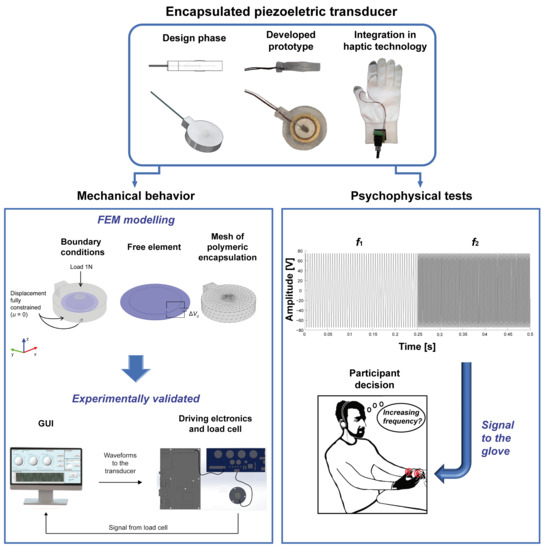
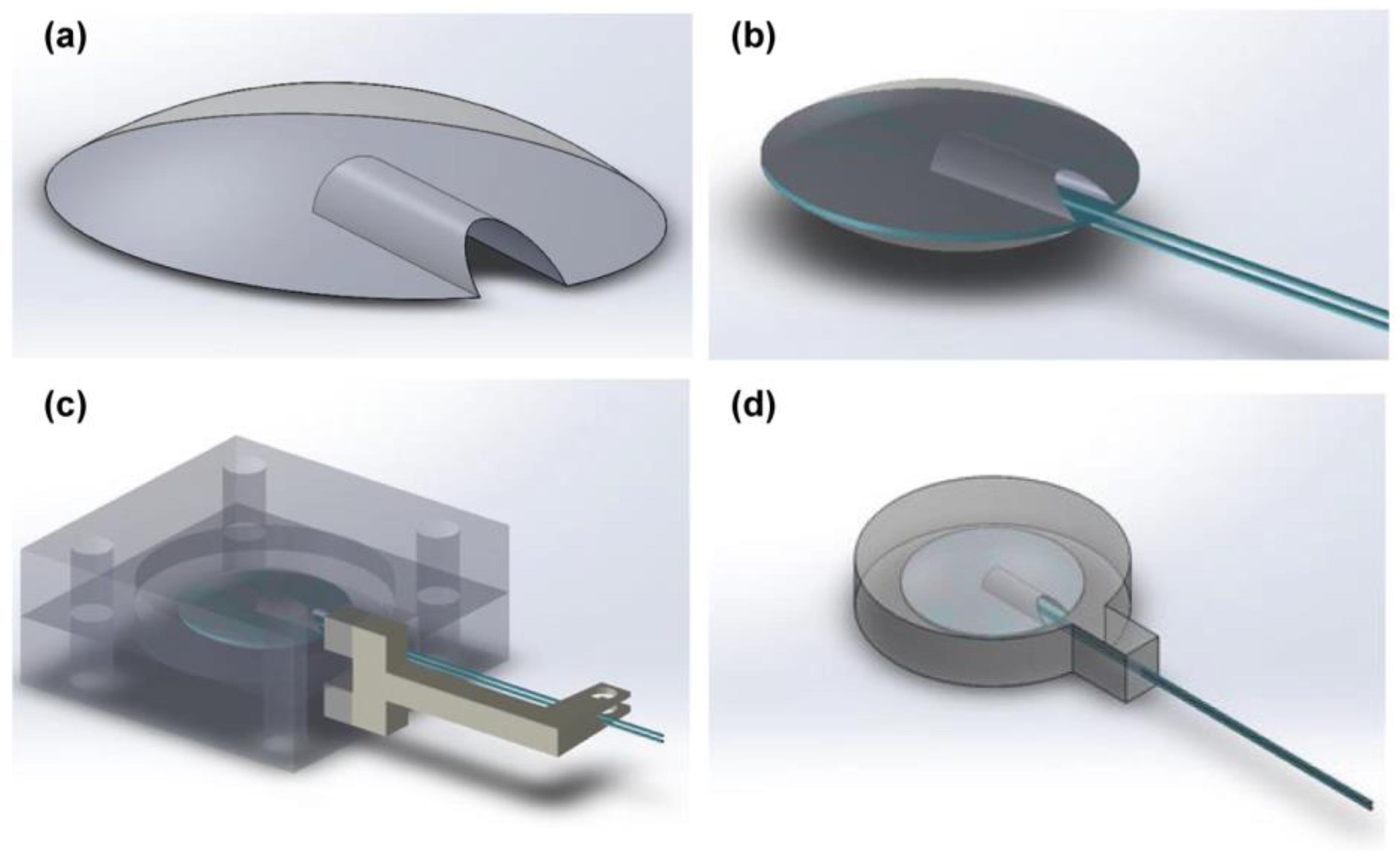
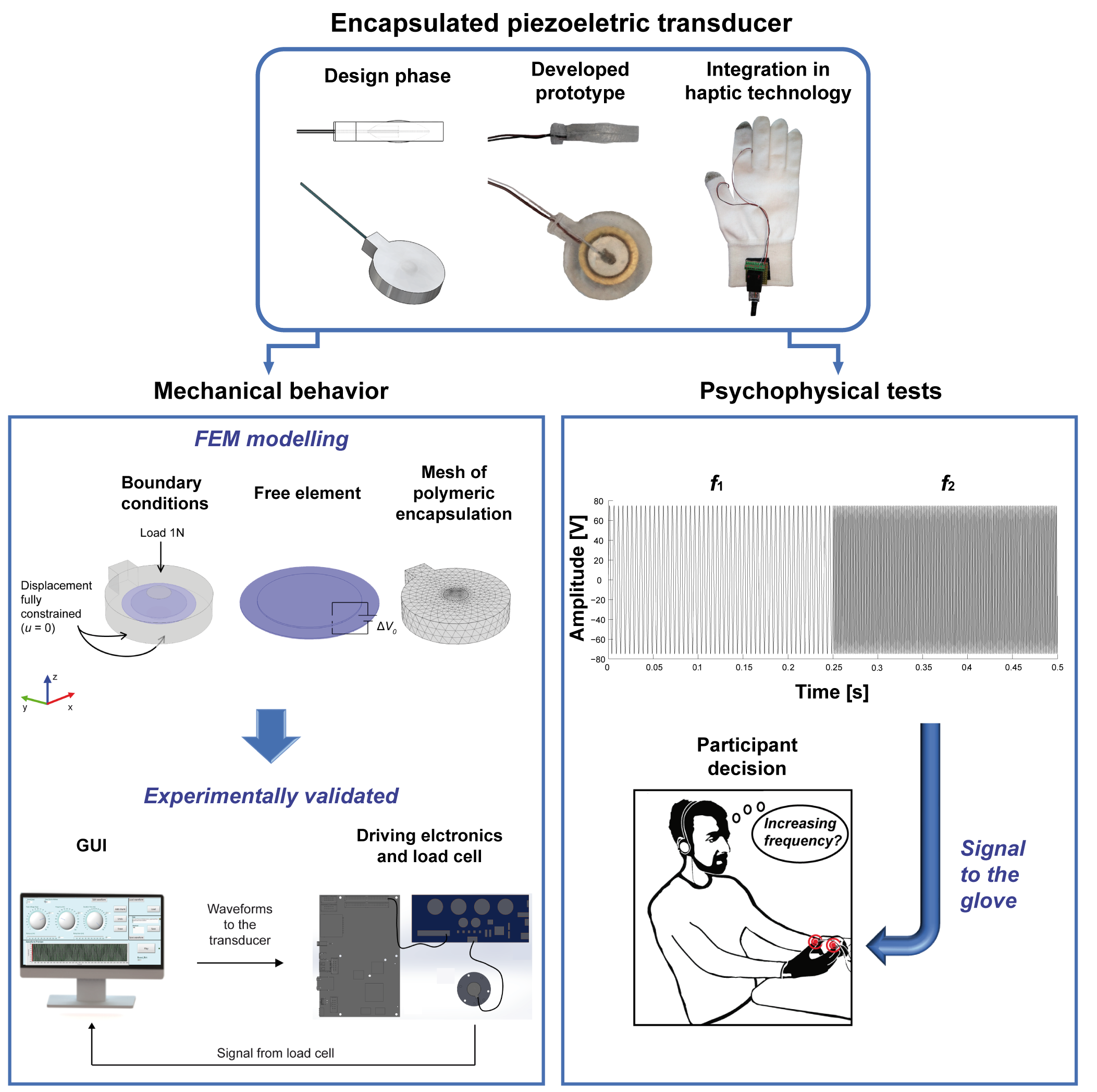
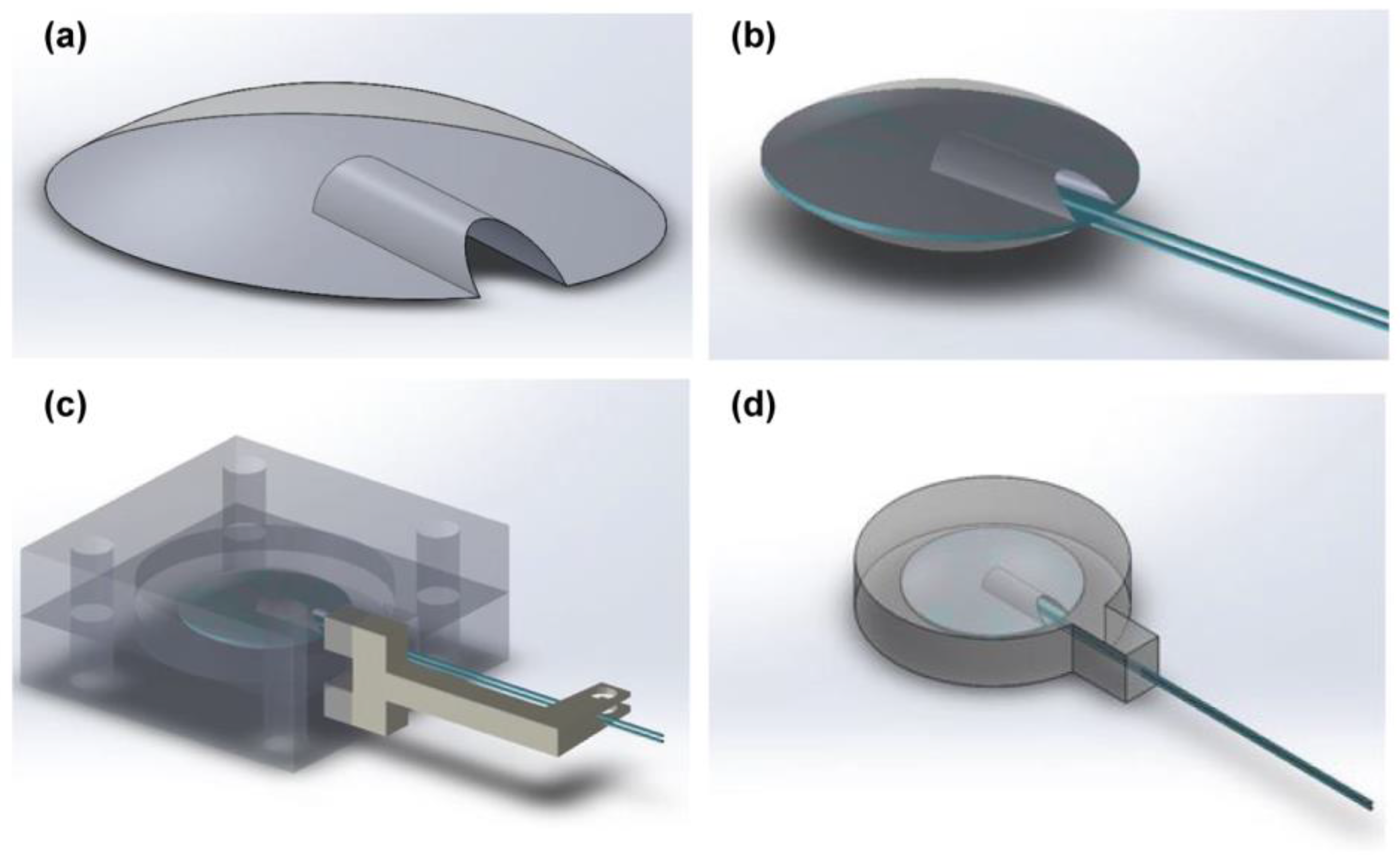
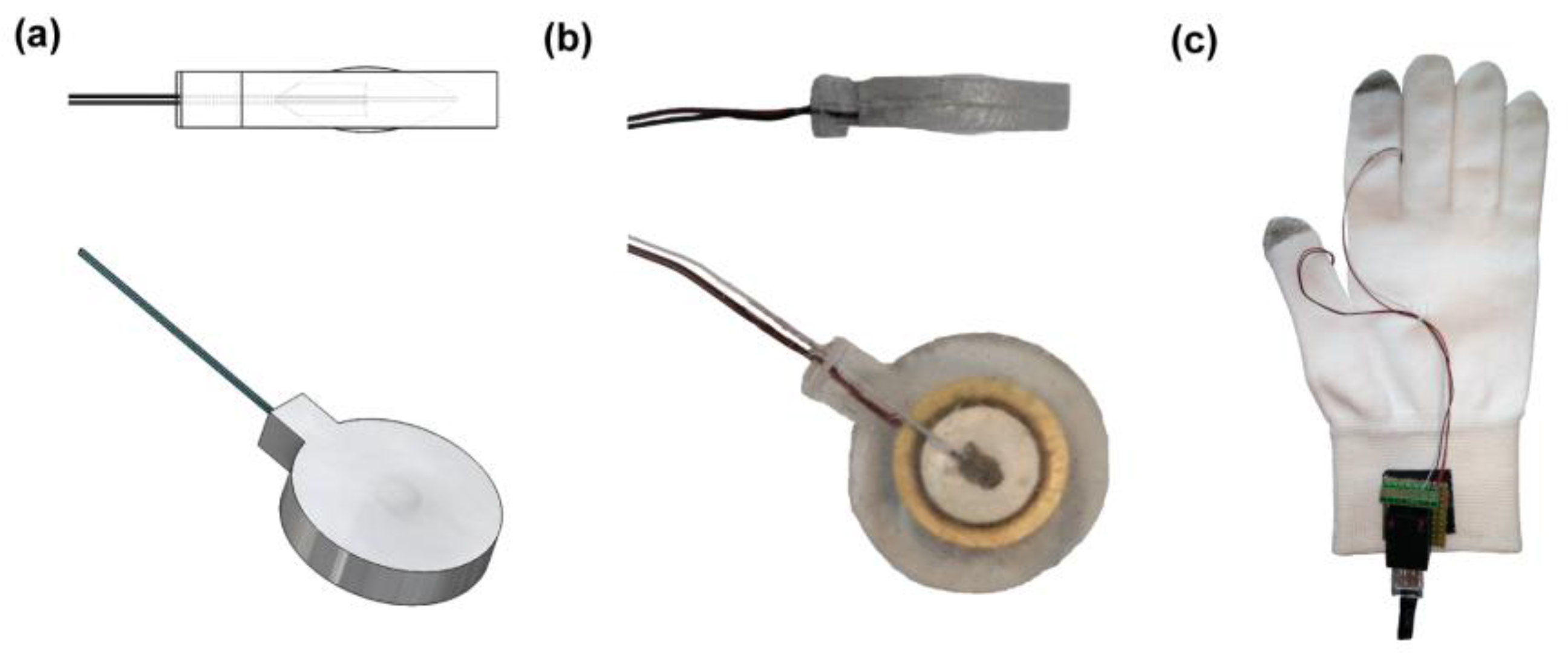
2.1. Piezoelectric Encapsulated Transducer
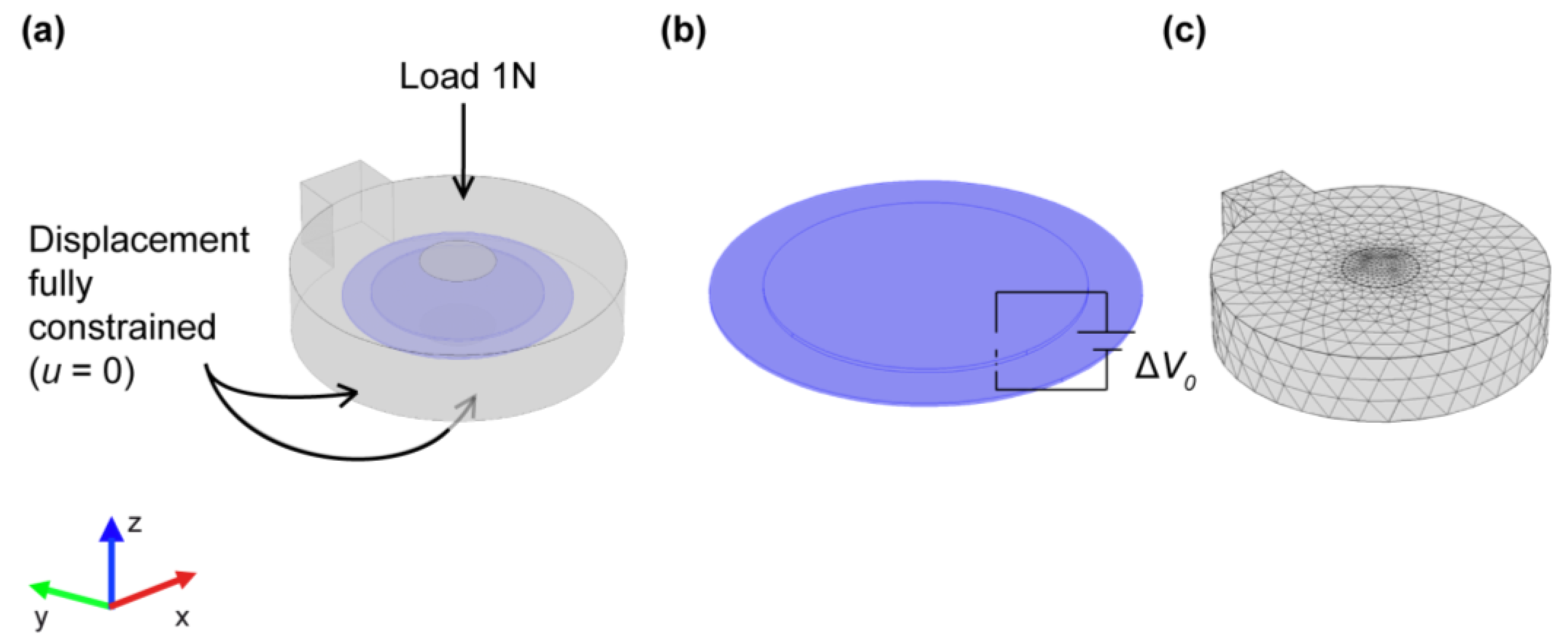
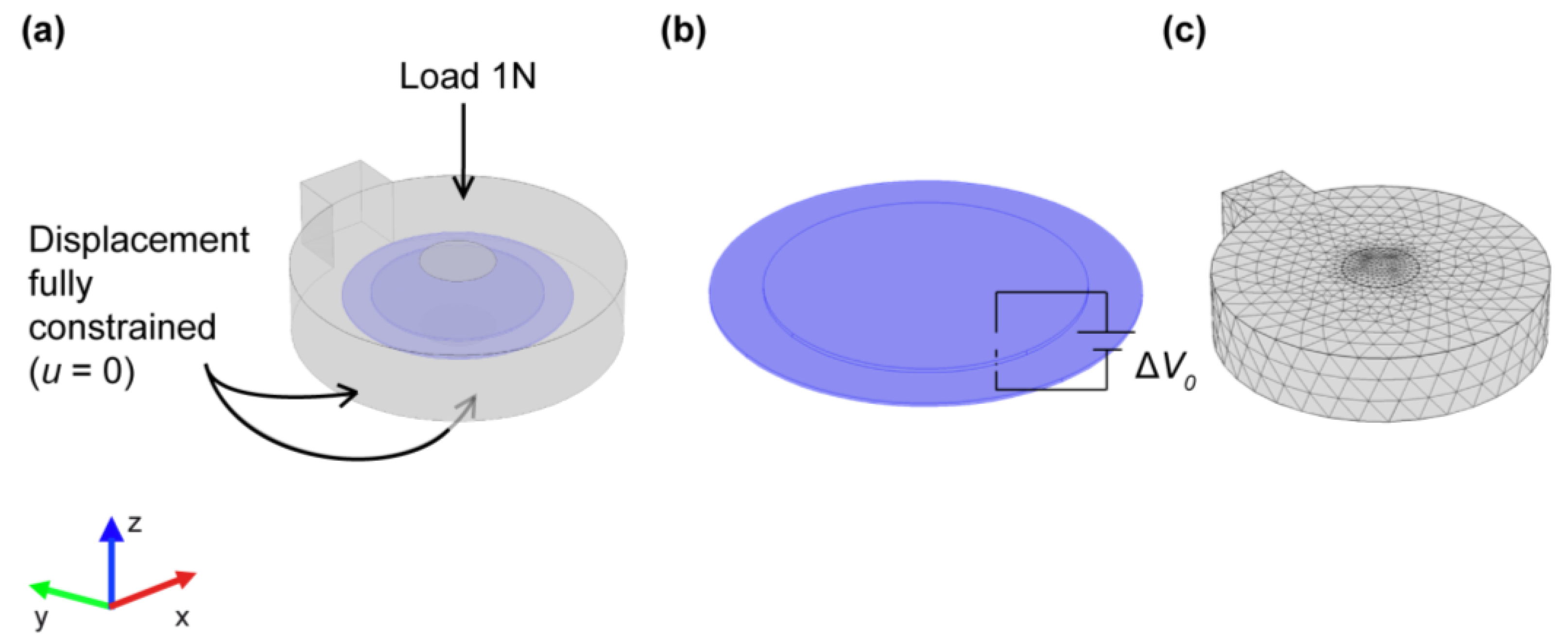
2.2. FEM Model of Transducer’s Electro-Mechanical Behaviour
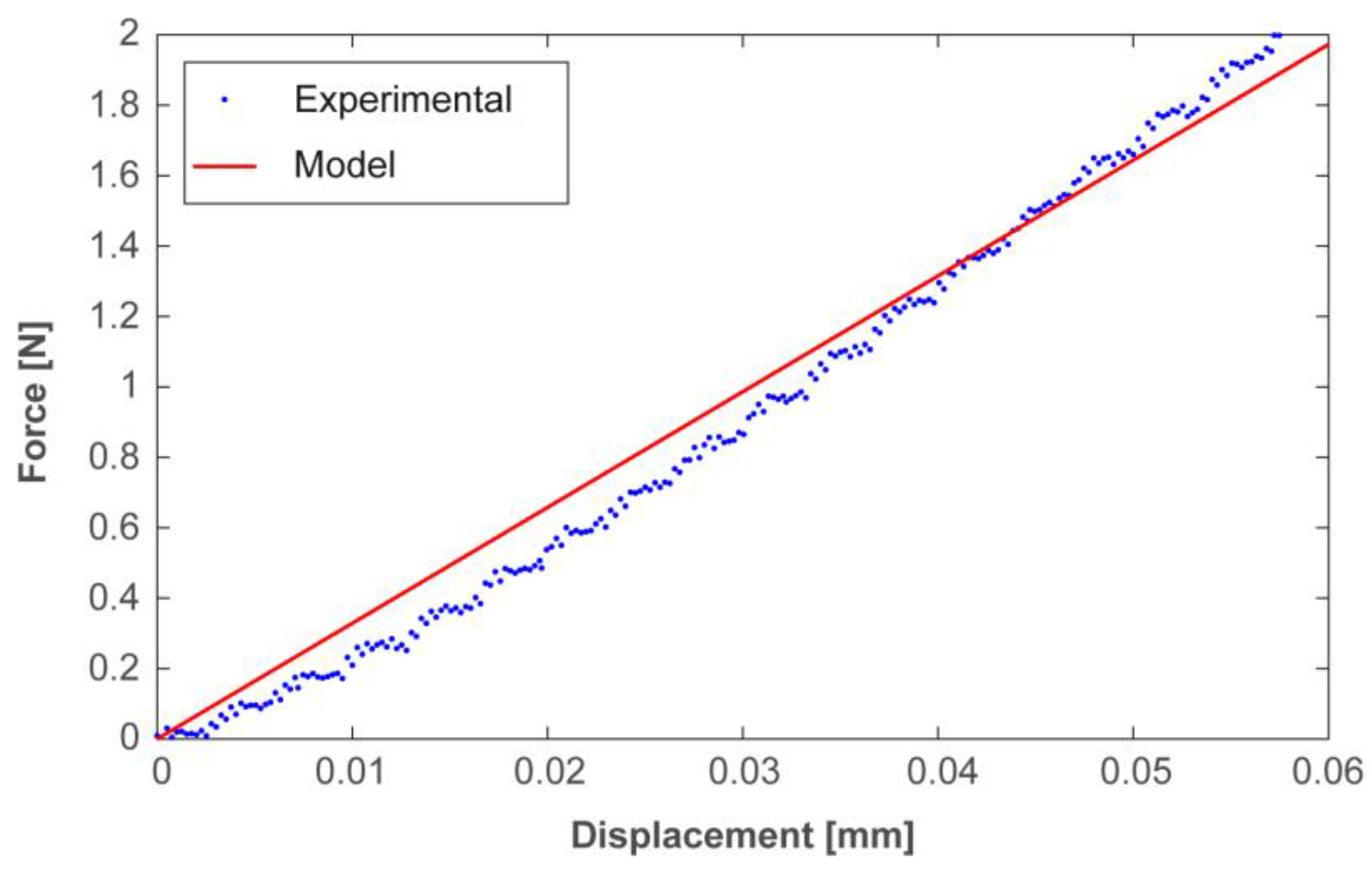
2.3. Preliminary Mechanical Characterization of the PDMS
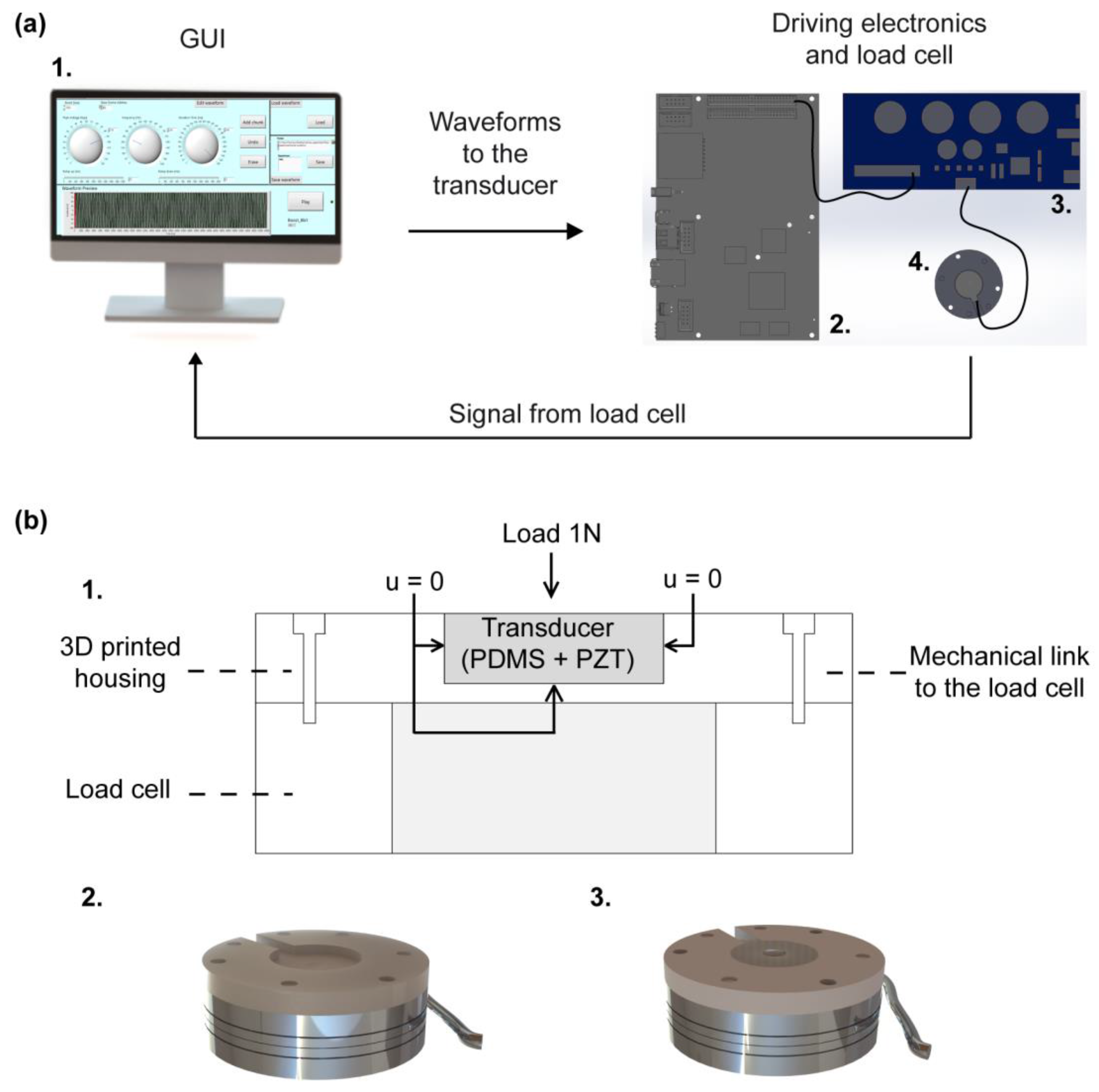
2.4. Experimental Electromechanical Characterization of the Encapsulated Transducer
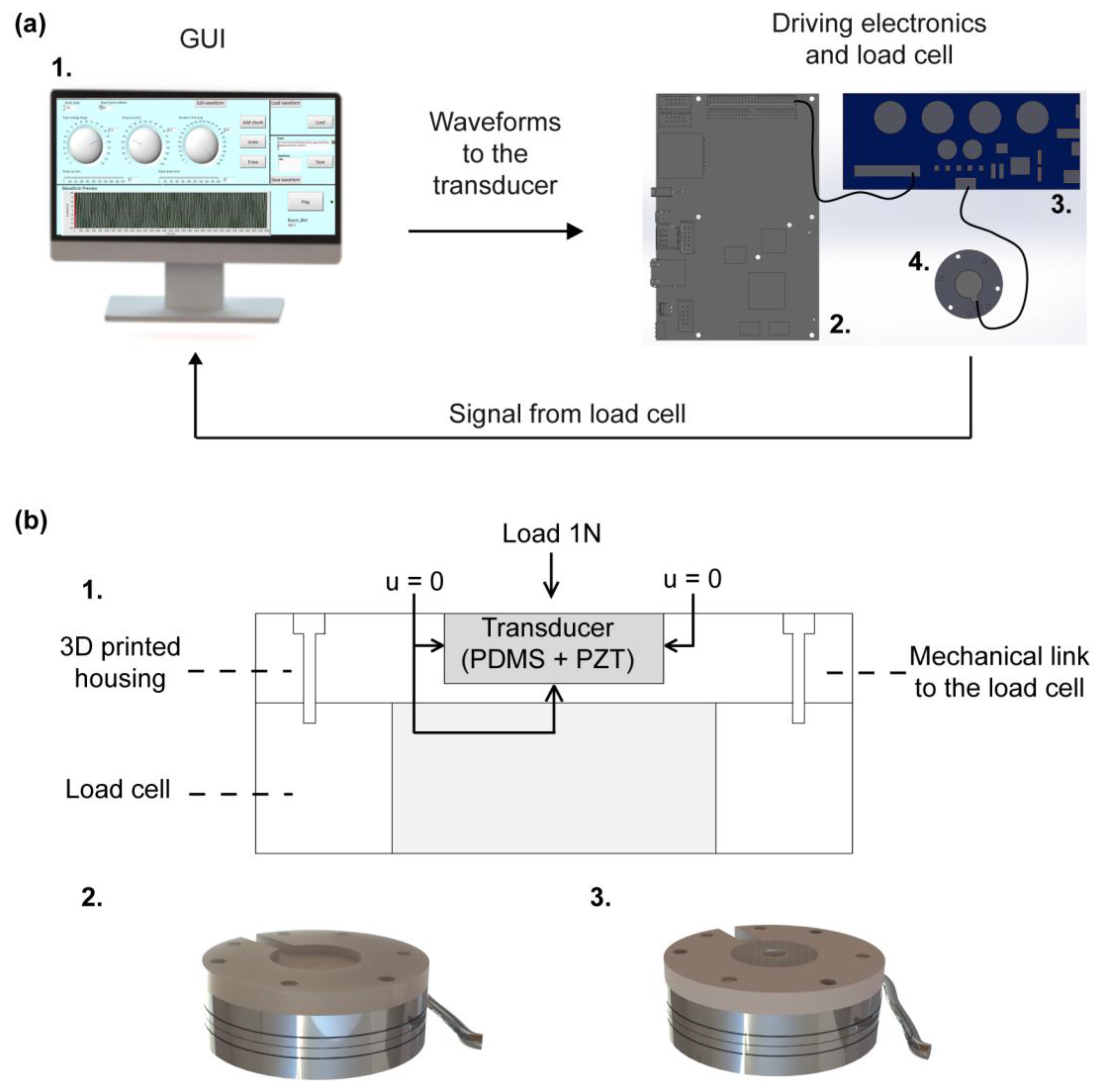
2.4.1. Experimental Setup
2.4.2. Experimental Procedure
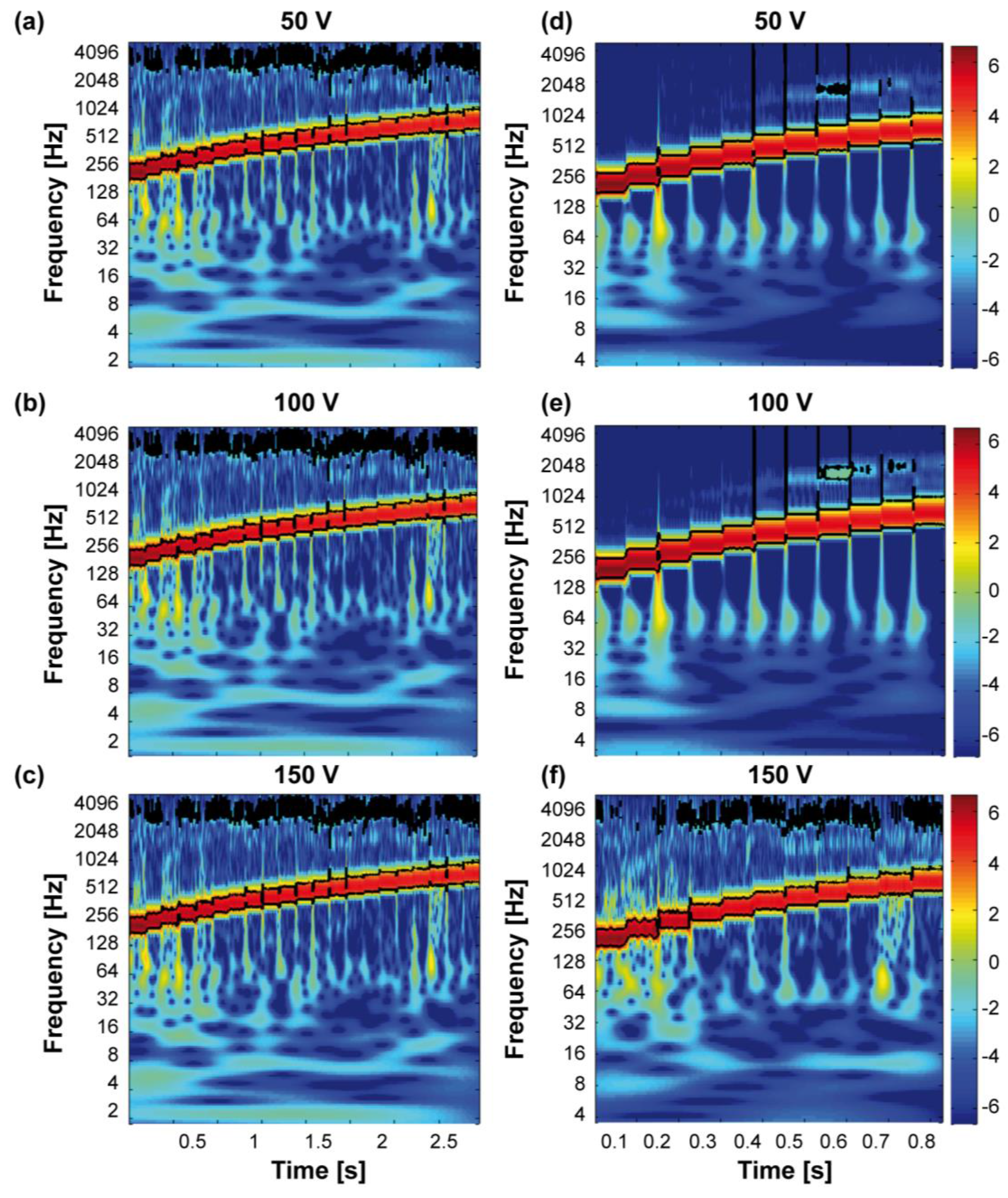
2.4.3. Data Analysis for the Electromechanical Characterization of the Encapsulated Transducer
2.5. System Integration for Psychophysical Evaluation
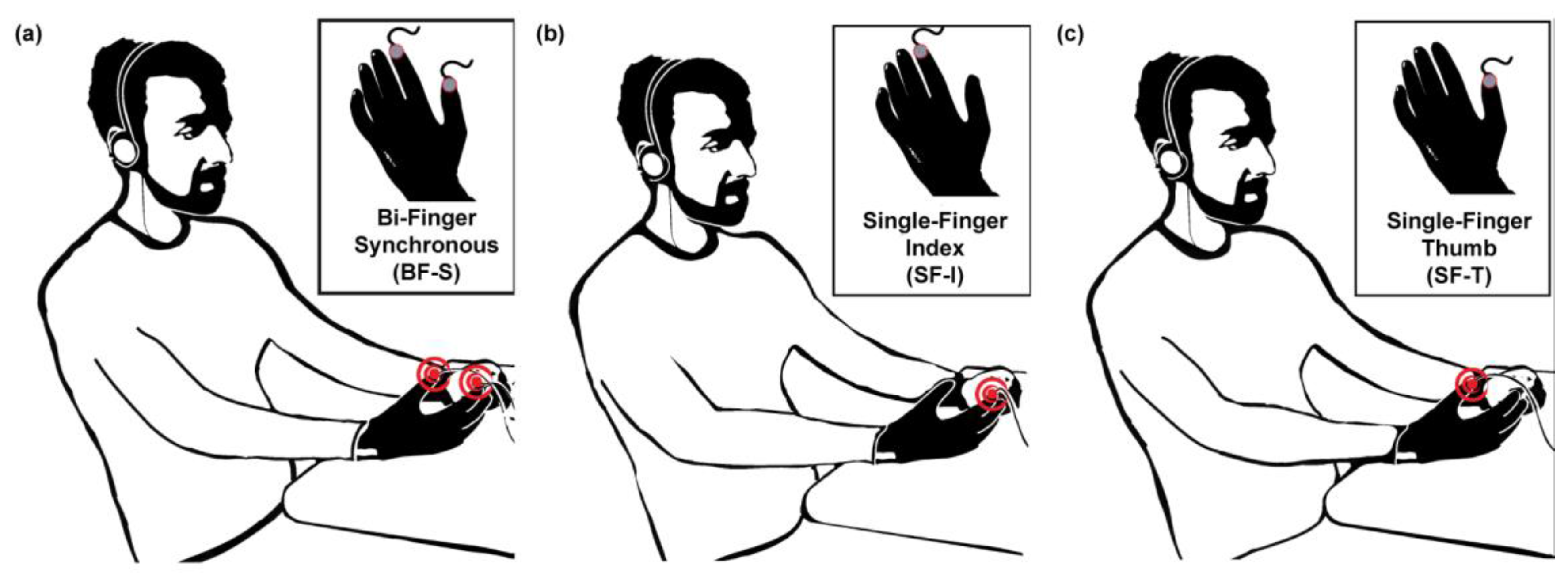
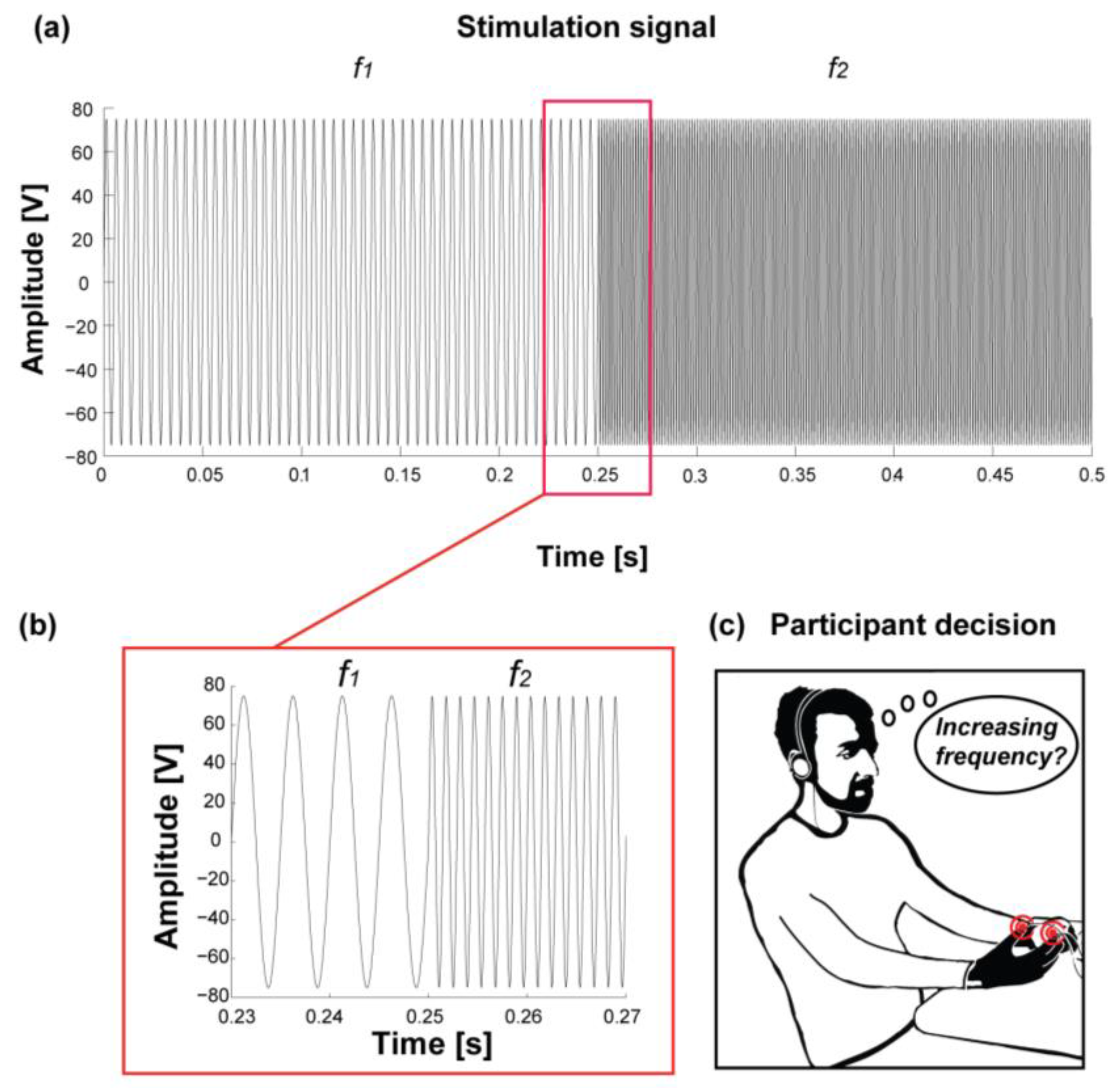
2.6. Psychophysical Evaluation
2.6.1. Participants
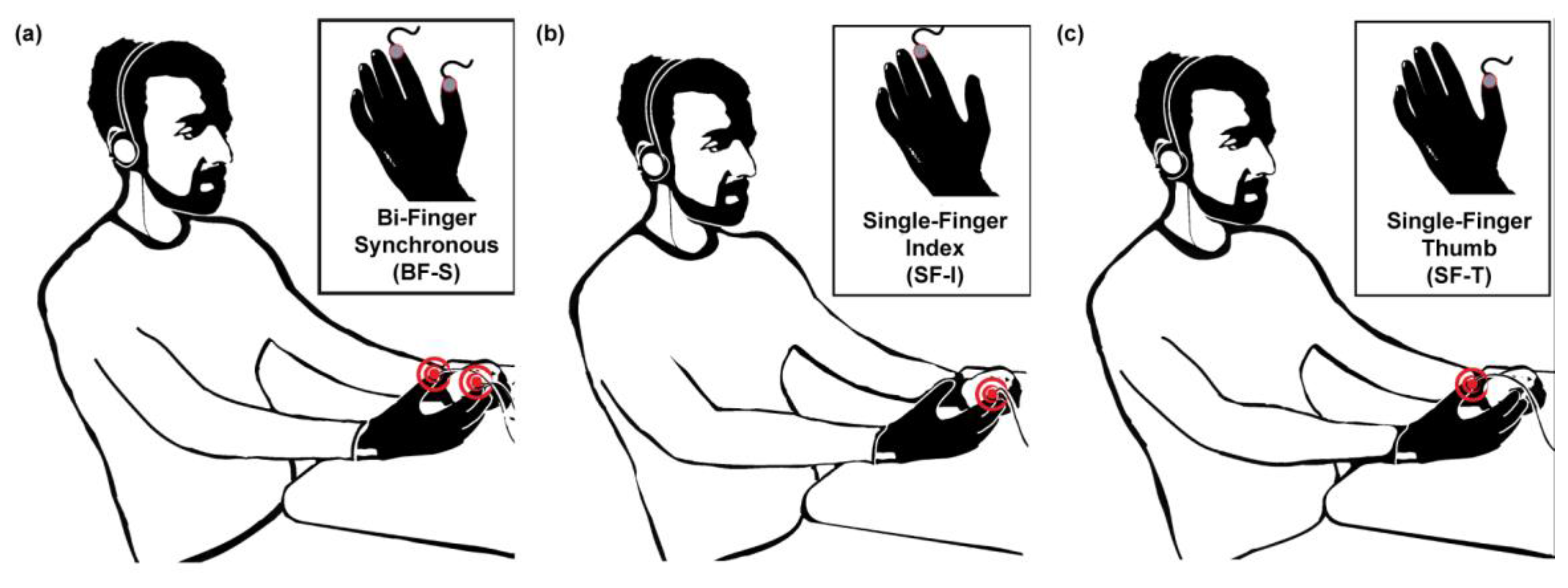
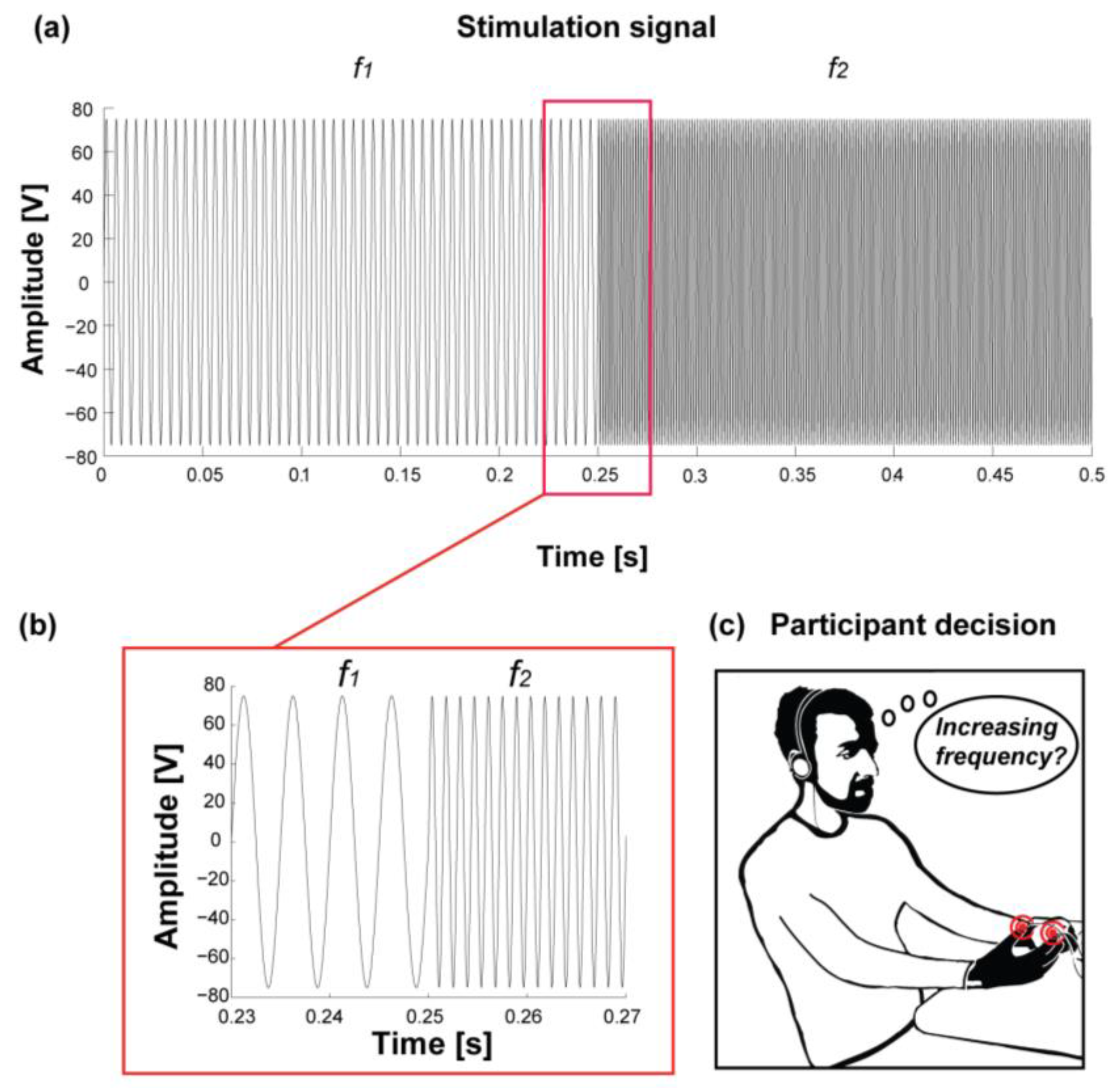
2.6.2. Experimental Procedure
2.6.3. Data Analysis for Psychophysical Experiments
3. Results and Discussion
3.1. Encapsulated Piezoelectric Transducer
3.2. Results of the Preliminary Experimental Mechanical Characterization of the PDMS
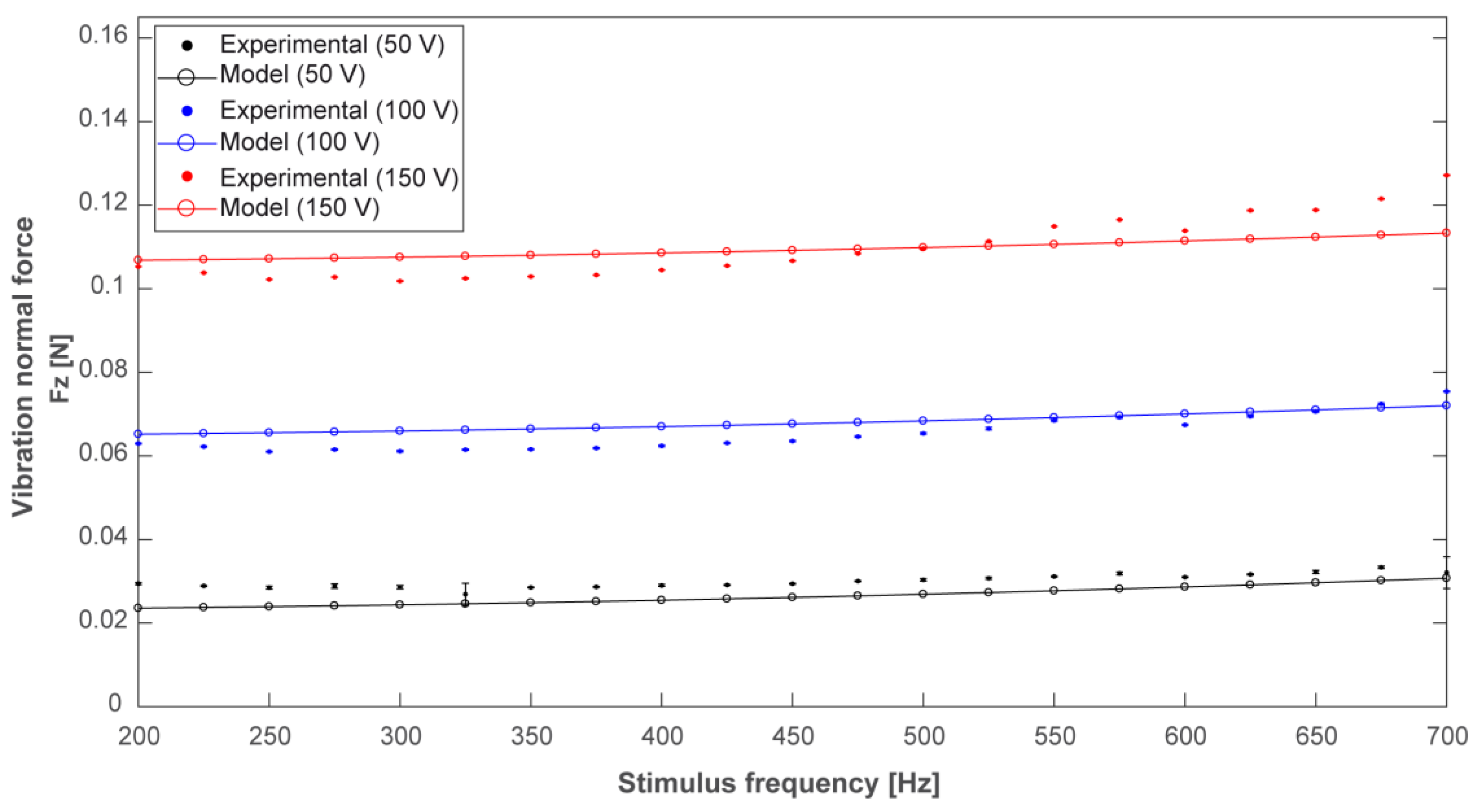
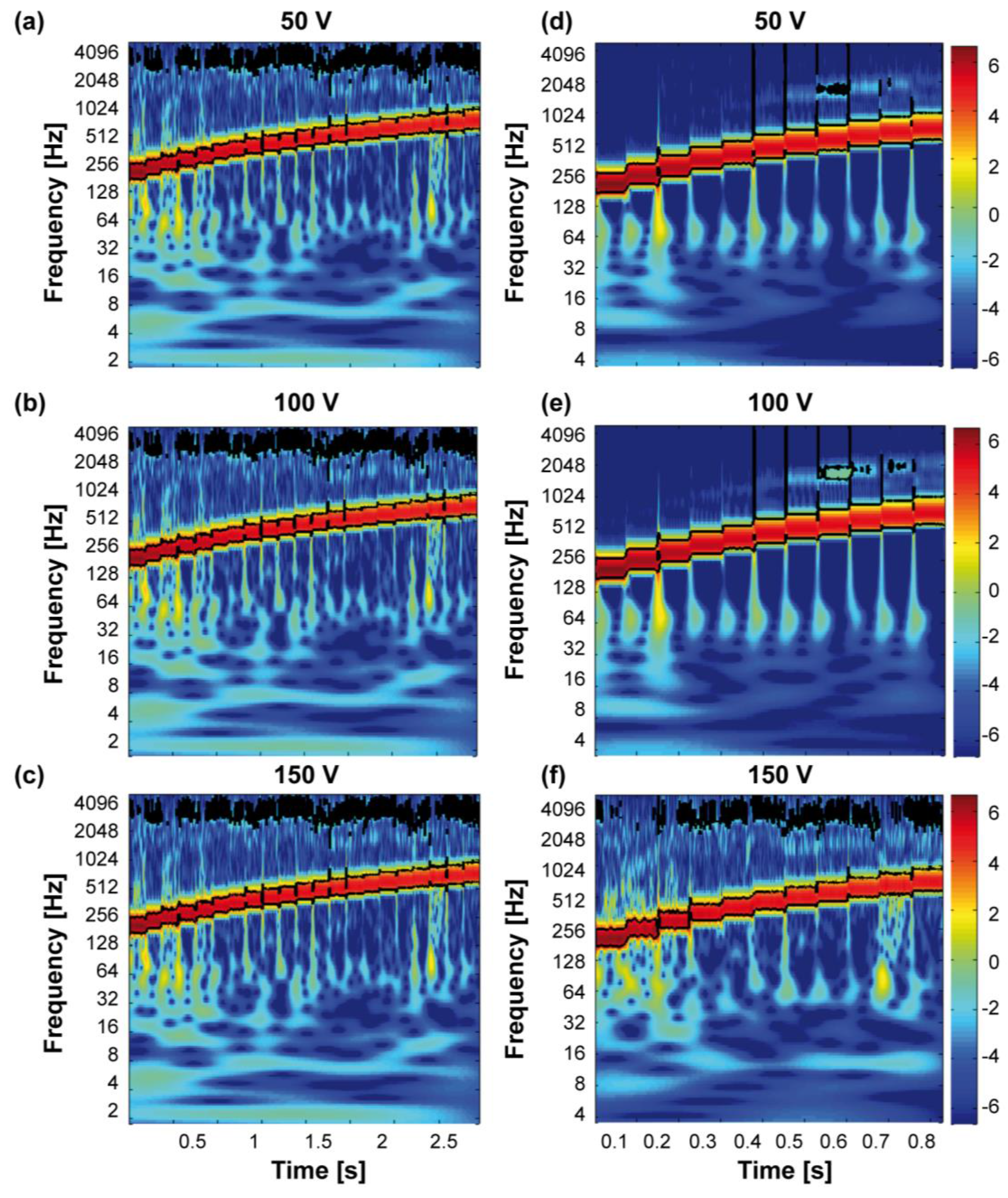
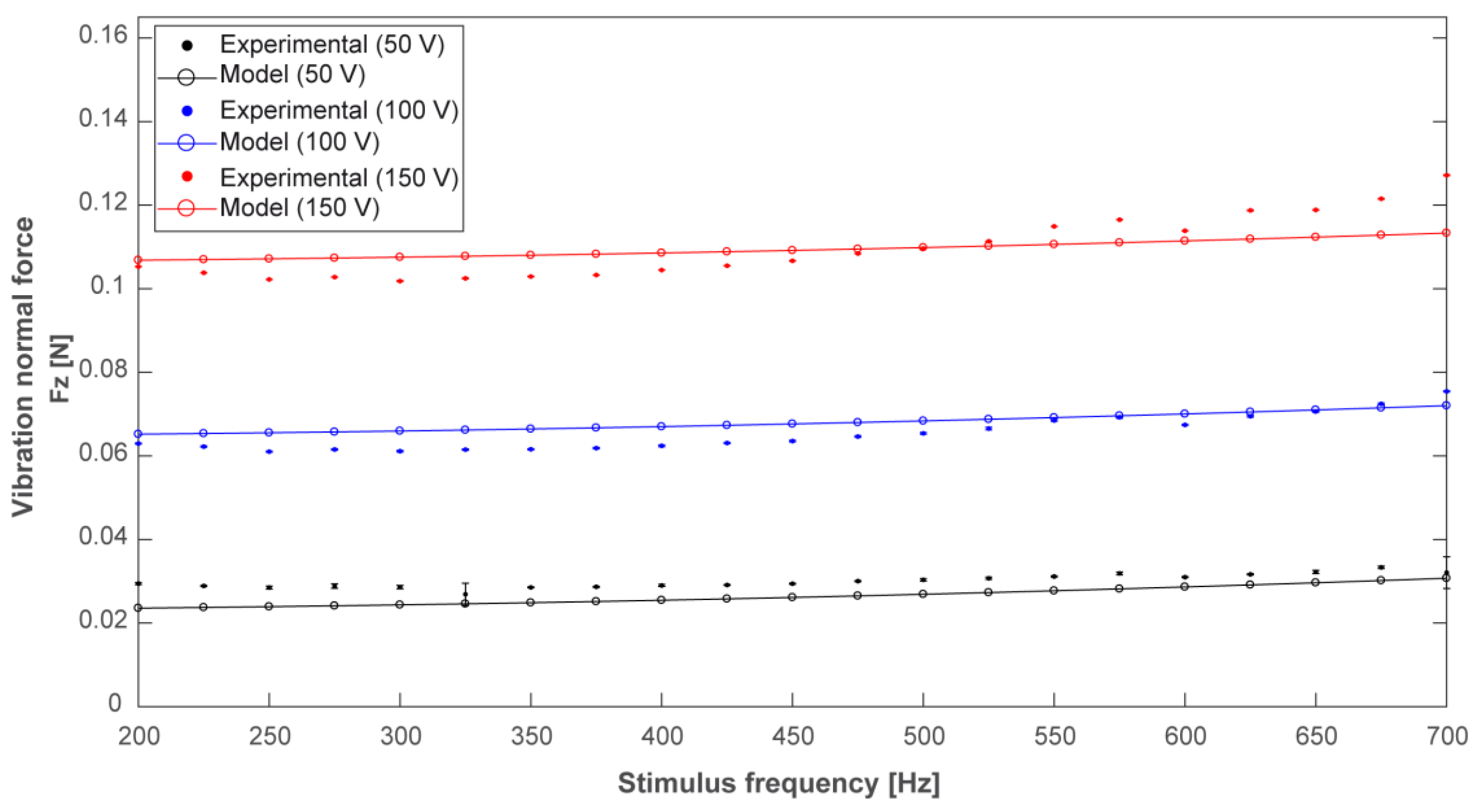
3.3. Transducer FEM Model and Experimental Characterization
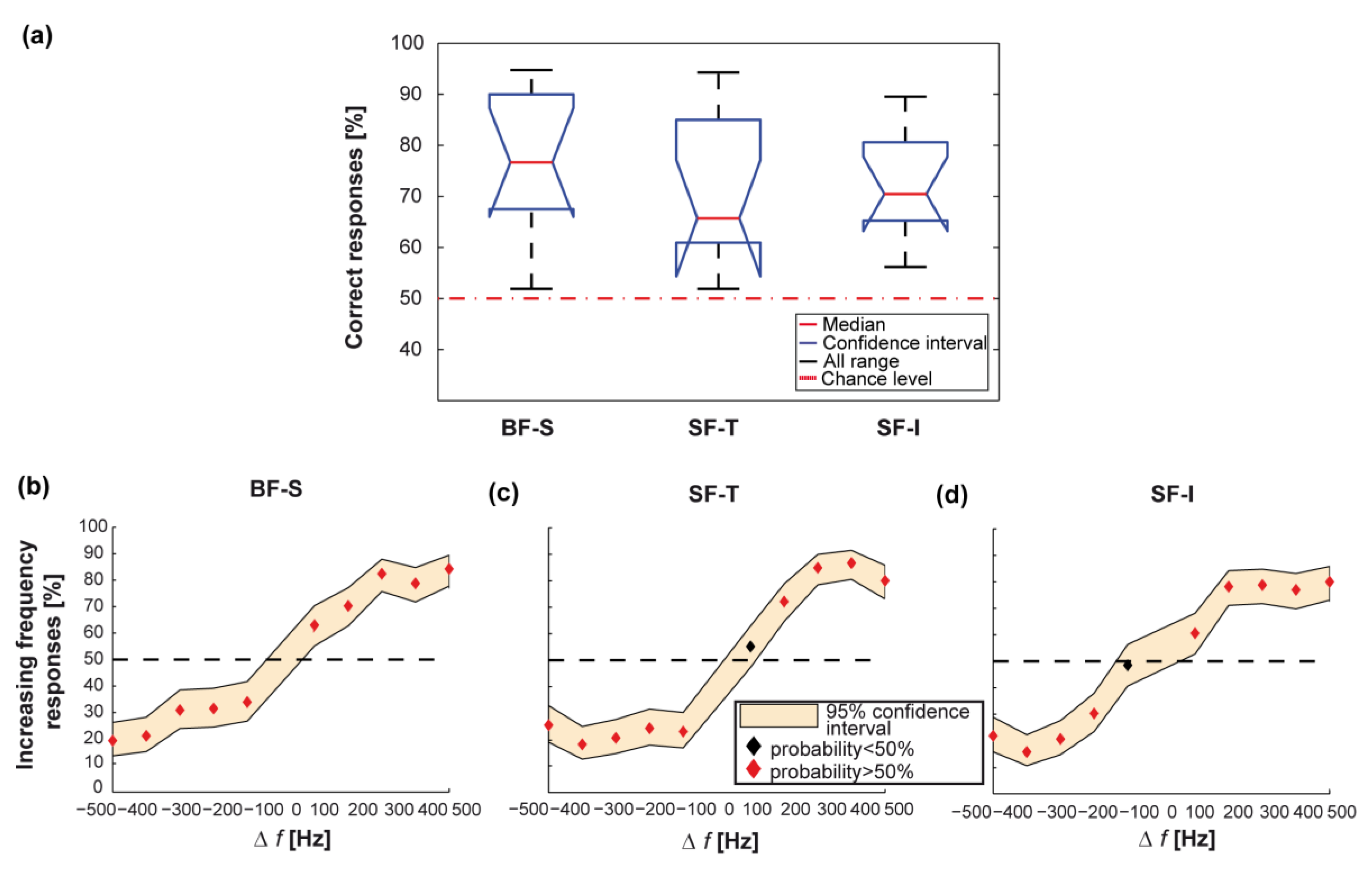
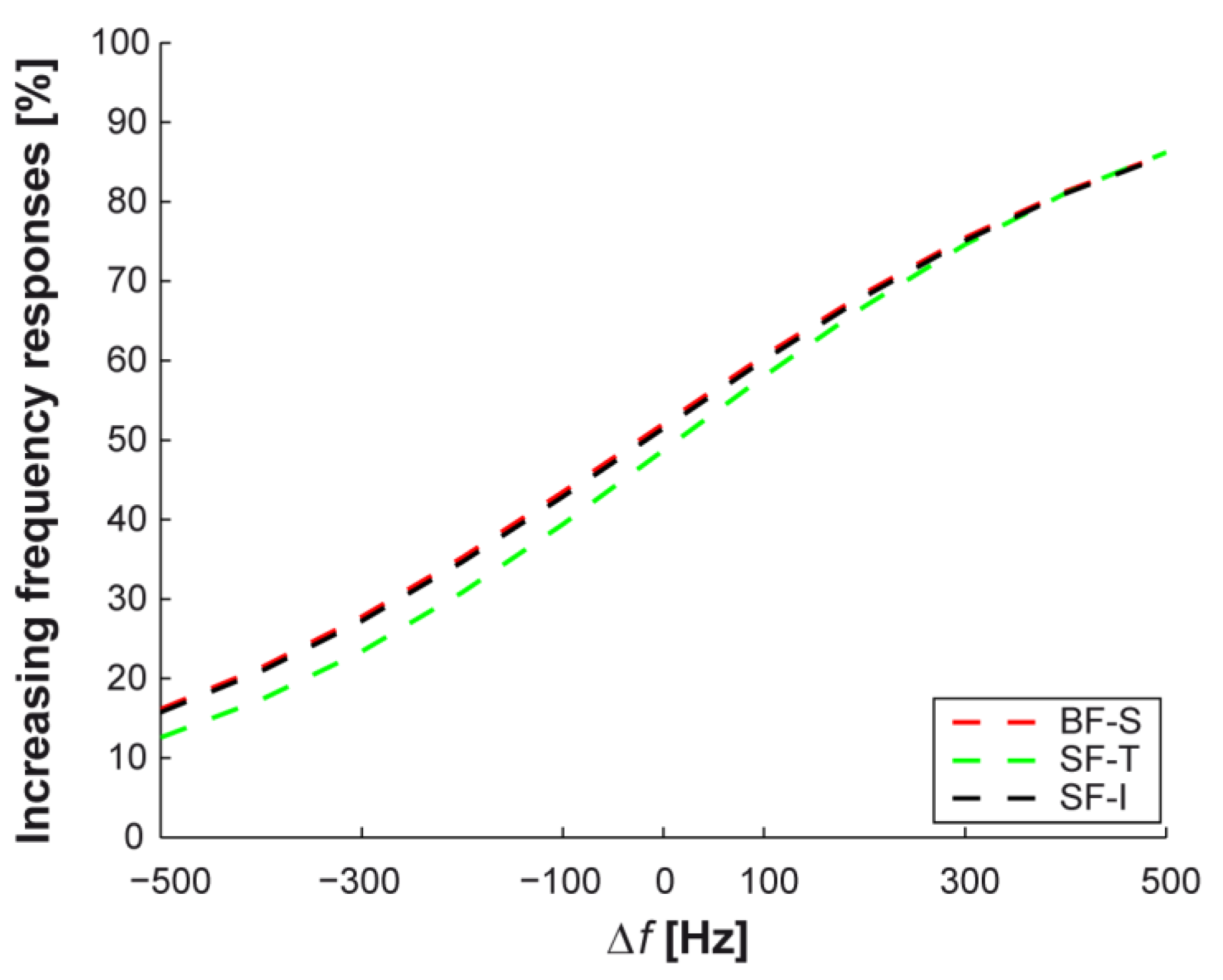
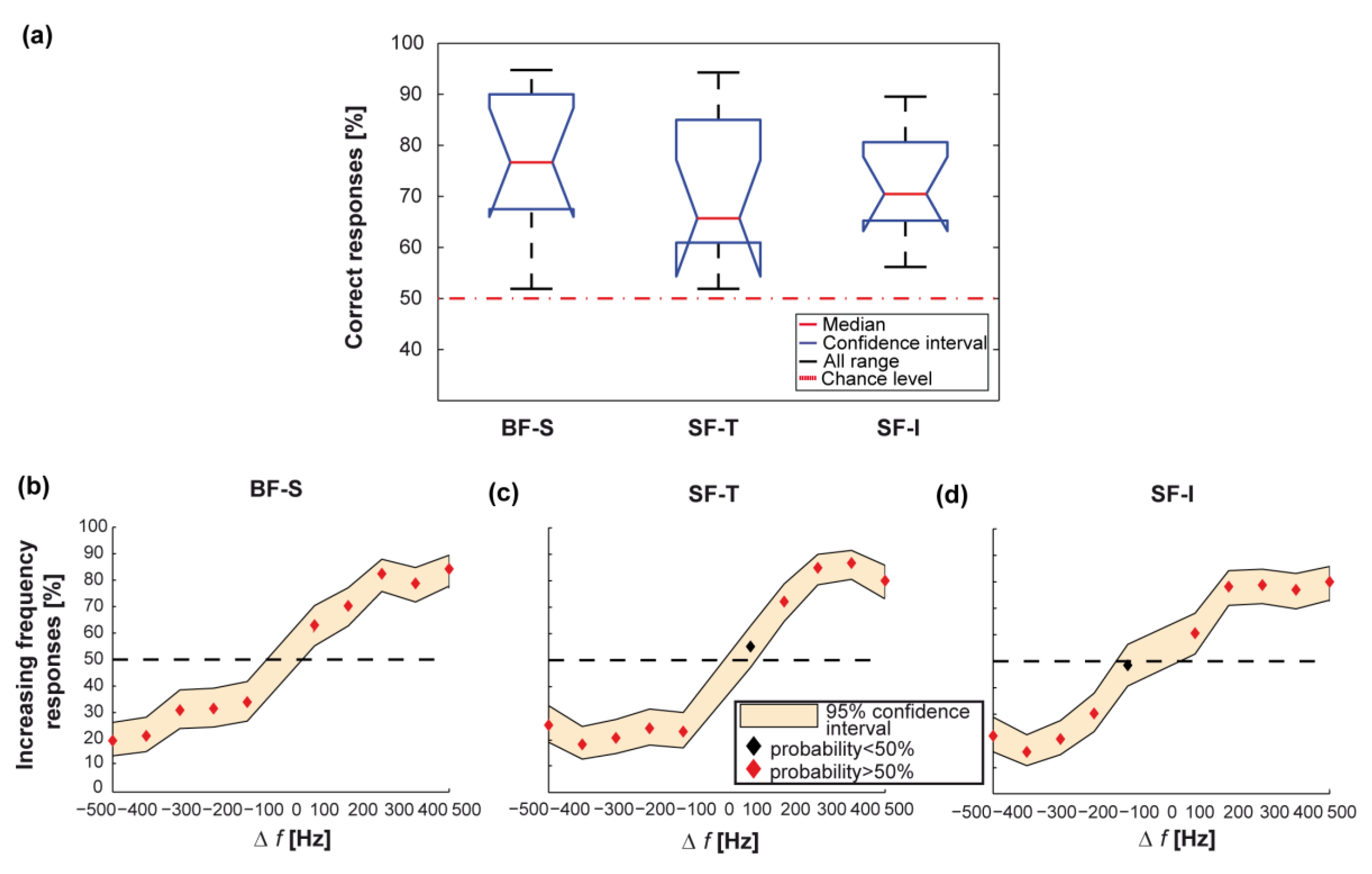
3.4. Psychophysics Results
4. Conclusions
4.1. Main Results of the Study
4.2. Potential Applications of Multi-Finger Vibrotactile Stimulation
Acknowledgments
Author Contributions
Conflicts of Interest
Funding
References
- Johansson, R.S.; Landstro, U.; Lundstro, R. Responses of mechanoreceptive afferent units in the glabrous skin of the human hand to sinusoidal skin displacements. Brain Res. 1982, 244, 17–25. [Google Scholar] [CrossRef]
- Johansson, R.S.; Vallbo, A.B. Tactile sensibility in the human hand: Relative and absolute densities of four types of mechanoreceptive units in glabrous skin. J. Physiol. 1979, 286, 283–300. [Google Scholar] [CrossRef] [PubMed]
- Gunther, E.; O’Modhrain, S. Cutaneous grooves: Composing for the sense of touch. J. New Music Res. 2003, 32, 369–381. [Google Scholar] [CrossRef]
- Cipriani, C.; Segil, J.L.; Clemente, F.; Edin, B. Humans can integrate feedback of discrete events in their sensorimotor control of a robotic hand. Exp. Brain Res. 2014, 232, 3421–3429. [Google Scholar] [CrossRef] [PubMed]
- Kaczmarek, K.A.; Bach-Y-Rita, P. Tactile displays. Virtual Environ. Adv. Interface Des. 1995, 55, 349–414. [Google Scholar]
- Goldish, L.H.; Taylor, H.E. The optacon: A valuable device for blind persons. New Outlook Blind 1974, 68, 49–56. [Google Scholar]
- Antfolk, C.; D’Alonzo, M.; Rosén, B.; Lundborg, G.; Sebelius, F.; Cipriani, C. Sensory feedback in upper limb prosthetics. Expert Rev. Med. Devices 2013, 10, 45–54. [Google Scholar] [CrossRef] [PubMed]
- Bolzmacher, C.; Hafez, M.; Khoudja, M.B.; Bernardoni, P.; Dubowsky, S. Smart structures and materials. In Polymer-Based Actuators for Virtual Reality Devices; International Society for Optics and Photonics: Bellingham, WA, USA, 2004; pp. 281–289. [Google Scholar]
- Pelrine, R.; Kornbluh, R.; Pei, Q.; Joseph, J. High-speed electrically actuated elastomers with strain greater than 100%. Science 2000, 287, 836–839. [Google Scholar] [CrossRef] [PubMed]
- Bar-Cohen, Y. Electroactive Polymer (EAP) Actuators as Artificial Muscles: Reality, Potential, and Challenges; SPIE Press: Bellingham, WA, USA, 2004; Volume 136. [Google Scholar]
- Lee, H.S.; Phung, H.; Lee, D.-H.; Kim, U.K.; Nguyen, C.T.; Moon, H.; Koo, J.C.; Choi, H.R. Design analysis and fabrication of arrayed tactile display based on dielectric elastomer actuator. Sens. Actuators A Phys. 2014, 205, 191–198. [Google Scholar] [CrossRef]
- Koo, I.M.; Jung, K.; Koo, J.C.; Nam, J.-D.; Lee, Y.K.; Choi, H.R. Development of soft-actuator-based wearable tactile display. IEEE Trans. Robot. 2008, 24, 549–558. [Google Scholar] [CrossRef]
- Ninomiya, T.; Okayama, Y.; Matsumoto, Y.; Arouette, X.; Osawa, K.; Miki, N. Mems-based hydraulic displacement amplification mechanism with completely encapsulated liquid. Sens. Actuators A Phys. 2011, 166, 277–282. [Google Scholar] [CrossRef]
- Kawazoe, M.; Kosemura, Y.; Miki, N. Encoding and presentation of surface textures using a mechanotactile display. Sens. Actuators A Phys. 2017, 261, 30–39. [Google Scholar] [CrossRef]
- Schena, B.M. Haptic Devices Using Electroactive Polymers. U.S. Patent 7,196,688, 27 March 2007. [Google Scholar]
- Saccomandi, P.; Zollo, L.; Ciancio, A.; Schena, E.; Fasano, A.; Oddo, C.; Carrozza, M.; Camboni, D. Tactile piezoresistive sensors for robotic application: Design and metrological characterization. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017; pp. 1–6. [Google Scholar]
- Wang, L.; Li, Y. A review for conductive polymer piezoresistive composites and a development of a compliant pressure transducer. IEEE Trans. Instrum. Meas. 2013, 62, 495–502. [Google Scholar] [CrossRef]
- Katragadda, R.B.; Xu, Y. A novel intelligent textile technology based on silicon flexible skins. Sens. Actuators A Phys. 2008, 143, 169–174. [Google Scholar] [CrossRef]
- Lee, H.-K.; Chung, J.; Chang, S.-I.; Yoon, E. Normal and shear force measurement using a flexible polymer tactile sensor with embedded multiple capacitors. J. Microelectromech. Syst. 2008, 17, 934–942. [Google Scholar]
- Hosoda, K.; Tada, Y.; Asada, M. Anthropomorphic robotic soft fingertip with randomly distributed receptors. Robot. Auton. Syst. 2006, 54, 104–109. [Google Scholar] [CrossRef]
- Wang, J.; Sato, H.; Xu, C.; Taya, M. Bioinspired design of tactile sensors based on flemion. J. Appl. Phys. 2009, 105, 083515. [Google Scholar] [CrossRef]
- Sziebig, G.; Solvang, B.; Kiss, C.; Korondi, P. Vibro-tactile feedback for VR systems. In Proceedings of the HSI’09, 2nd Conference on Human System Interactions, Catania, Italy, 21–23 May 2009; pp. 406–410. [Google Scholar]
- Alahakone, A.U.; Senanayake, S.; Arosha, M. Vibrotactile feedback systems: Current trends in rehabilitation, sports and information display. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Singapore, 14–17 July 2009; pp. 1148–1153. [Google Scholar]
- Yamamoto, T.; Abolhassani, N.; Jung, S.; Okamura, A.M.; Judkins, T.N. Augmented reality and haptic interfaces for robot-assisted surgery. Int. J. Med. Robot. Comput. Assist. Surg. 2012, 8, 45–56. [Google Scholar] [CrossRef] [PubMed]
- Choi, S.; Kuchenbecker, K.J. Vibrotactile display: Perception, technology, and applications. Proc. IEEE 2013, 101, 2093–2104. [Google Scholar] [CrossRef]
- Sibert, J.; Cooper, J.; Covington, C.; Stefanovski, A.; Thompson, D.; Lindeman, R.W. Vibrotactile feedback for enhanced control of urban search and rescue robots. In Proceedings of the IEEE International Workshop on Safety, Security and Rescue Robotics, Gaithersburg, MD, USA, 22–25 August 2006. [Google Scholar]
- Pacchierotti, C.; Sinclair, S.; Solazzi, M.; Frisoli, A.; Hayward, V.; Prattichizzo, D. Wearable haptic systems for the fingertip and the hand: Taxonomy, review, and perspectives. IEEE Trans. Haptics 2017, PP, 1–23. [Google Scholar] [CrossRef] [PubMed]
- Caporusso, N. A wearable malossi Alphabet interface for deafblind people. In Proceedings of the Working Conference on Advanced Visual Interfaces, Naples, Italy, 28–30 May 2008; ACM: New York, NY, USA, 2008; pp. 445–448. [Google Scholar]
- Murray, A.M.; Klatzky, R.L.; Khosla, P.K. Psychophysical characterization and testbed validation of a wearable vibrotactile glove for telemanipulation. Presence Teleoper. Virtual Environ. 2003, 12, 156–182. [Google Scholar] [CrossRef]
- Tsetserukou, D. Haptihug: A novel haptic display for communication of hug over a distance. Haptics Gener. Perceiving Tang. Sensat. 2010, 6191, 340–347. [Google Scholar]
- García-Valle, G.; Ferre, M.; Breñosa, J.; Aracil, R.; Sebastian, J.M.; Giachritsis, C. Design and development of a multimodal vest for virtual immersion and guidance. In Proceedings of the International Conference on Human Haptic Sensing and Touch Enabled Computer Applications, London, UK, 4–7 July 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 251–262. [Google Scholar]
- Jimenez, R.; Jimenez, A.M. Blind waypoint navigation using a computer controlled vibrotactile belt. In Advances in Human Factors and System Interactions; Springer: Berlin/Heidelberg, Germany, 2017; pp. 3–13. [Google Scholar]
- Lee, Y.H.; Medioni, G. Rgb-d camera based wearable navigation system for the visually impaired. Comput. Vis. Image Underst. 2016, 149, 3–20. [Google Scholar] [CrossRef]
- Sunu-Inc. Sunu Band. Available online: http://sunu.io/ (accessed on 20 May 2017).
- Kaul, O.B.; Rohs, M. Haptichead: A spherical vibrotactile grid around the head for 3D guidance in virtual and augmented reality. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; ACM: New York, NY, USA, 2017; pp. 3729–3740. [Google Scholar]
- de Jesus Oliveira, V.A.; Brayda, L.; Nedel, L.; Maciel, A. Designing a vibrotactile head-mounted display for spatial awareness in 3d spaces. IEEE Trans. Vis. Comput. Graph. 2017, 23, 1409–1417. [Google Scholar] [CrossRef] [PubMed]
- Tactus-Technology-Inc. Phorm. Available online: https://www.getphorm.com/; http://tactustechnology.com/technology/. (accessed on 28 March 2017).
- Johnson, K.O.; Phillips, J.R. Tactile spatial resolution I: Two-point discrimination, gap detection, grating resolution, and letter recognition. J. Neurophysiol. 1981, 46, 1177–1192. [Google Scholar] [PubMed]
- Vallbo, A.B.; Johansson, R. Properties of cutaneous mechanoreceptors in the human hand related to touch sensation. Hum. Neurobiol. 1984, 3, 3–14. [Google Scholar] [PubMed]
- Johnston, I.; McCluskey, D.; Tan, C.; Tracey, M. Mechanical characterization of bulk sylgard 184 for microfluidics and microengineering. J. Micromech. Microeng. 2014, 24, 035017. [Google Scholar] [CrossRef]
- Du, P.; Lin, I.-K.; Lu, H.; Zhang, X. Extension of the beam theory for polymer bio-transducers with low aspect ratios and viscoelastic characteristics. J. Micromech. Microeng. 2010, 20, 095016. [Google Scholar] [CrossRef]
- Verrillo, R.T. Psychophysics of vibrotactile stimulation. J. Acoust. Soc. Am. 1985, 77, 225–232. [Google Scholar] [CrossRef] [PubMed]
- Brewster, S.; Brown, L.M. Tactons: Structured tactile messages for non-visual information display. In Proceedings of the 5th Conference on Australasian User Interface; Australian Computer Society Inc.: Darlinghurst, Australia, 2004; Volume 28, pp. 15–23. [Google Scholar]
- Bolanowski, S.J., Jr.; Gescheider, G.A.; Verrillo, R.T.; Checkosky, C.M. Four channels mediate the mechanical aspects of touch. J. Acoust. Soc. Am. 1988, 84, 1680–1694. [Google Scholar] [CrossRef] [PubMed]
- Sorgini, F.; Ghosh, R.; Huebotter, J.F.; Caliò, R.; Galassi, C.; Oddo, C.M.; Kukreja, S.L. Design and preliminary evaluation of haptic devices for upper limb stimulation and integration within a virtual reality cave. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 464–469. [Google Scholar]
- Grinsted, A.; Moore, J.C.; Jevrejeva, S. Application of the cross wavelet transform and wavelet coherence to geophysical time series. Nonlinear Process. Geophys. 2004, 11, 561–566. [Google Scholar] [CrossRef]
- Jones, L.A.; Sarter, N.B. Tactile displays: Guidance for their design and application. Hum. Factors 2008, 50, 90–111. [Google Scholar] [CrossRef] [PubMed]
- Bogacz, R.; Brown, E.; Moehlis, J.; Holmes, P.; Cohen, J.D. The physics of optimal decision making: A formal analysis of models of performance in two-alternative forced-choice tasks. Psychol. Rev. 2006, 113, 700. [Google Scholar] [CrossRef] [PubMed]
- Antfolk, C.; D’Alonzo, M.; Controzzi, M.; Lundborg, G.; Rosen, B.; Sebelius, F.; Cipriani, C. Artificial redirection of sensation from prosthetic fingers to the phantom hand map on transradial amputees: Vibrotactile versus mechanotactile sensory feedback. Neural Syst. Rehabil. Eng. IEEE Trans. 2013, 21, 112–120. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vibrotactile Stimulus | Vibrotactile Stimuli | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| f1 (Hz) | 700 | 650 | 600 | 550 | 500 | 400 | 350 | 300 | 250 | 200 |
| f2 (Hz) | 200 | 250 | 300 | 350 | 400 | 500 | 550 | 600 | 650 | 700 |
| ∆f (Hz) | −500 | −400 | −300 | −200 | −100 | 100 | 200 | 300 | 400 | 500 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sorgini, F.; Mazzoni, A.; Massari, L.; Caliò, R.; Galassi, C.; Kukreja, S.L.; Sinibaldi, E.; Carrozza, M.C.; Oddo, C.M. Encapsulation of Piezoelectric Transducers for Sensory Augmentation and Substitution with Wearable Haptic Devices. Micromachines 2017, 8, 270. https://doi.org/10.3390/mi8090270
Sorgini F, Mazzoni A, Massari L, Caliò R, Galassi C, Kukreja SL, Sinibaldi E, Carrozza MC, Oddo CM. Encapsulation of Piezoelectric Transducers for Sensory Augmentation and Substitution with Wearable Haptic Devices. Micromachines. 2017; 8(9):270. https://doi.org/10.3390/mi8090270
Chicago/Turabian StyleSorgini, Francesca, Alberto Mazzoni, Luca Massari, Renato Caliò, Carmen Galassi, Sunil L. Kukreja, Edoardo Sinibaldi, Maria Chiara Carrozza, and Calogero M. Oddo. 2017. "Encapsulation of Piezoelectric Transducers for Sensory Augmentation and Substitution with Wearable Haptic Devices" Micromachines 8, no. 9: 270. https://doi.org/10.3390/mi8090270