Topological Aspects of the Multi-Language Phases of the Naming Game on Community-Based Networks

Abstract
:1. Introduction
2. Relative Connectedness in Two-Community Symmetric Networks
3. -Ary Naming Game in the Stochastic Block Model
- ●
- Q notebooks with one name,
- ●
- notebooks with two names,
- ●
- notebooks with three names,
- ⋮
- ●
- notebooks with Q names,
3.1. Mean Field Equations
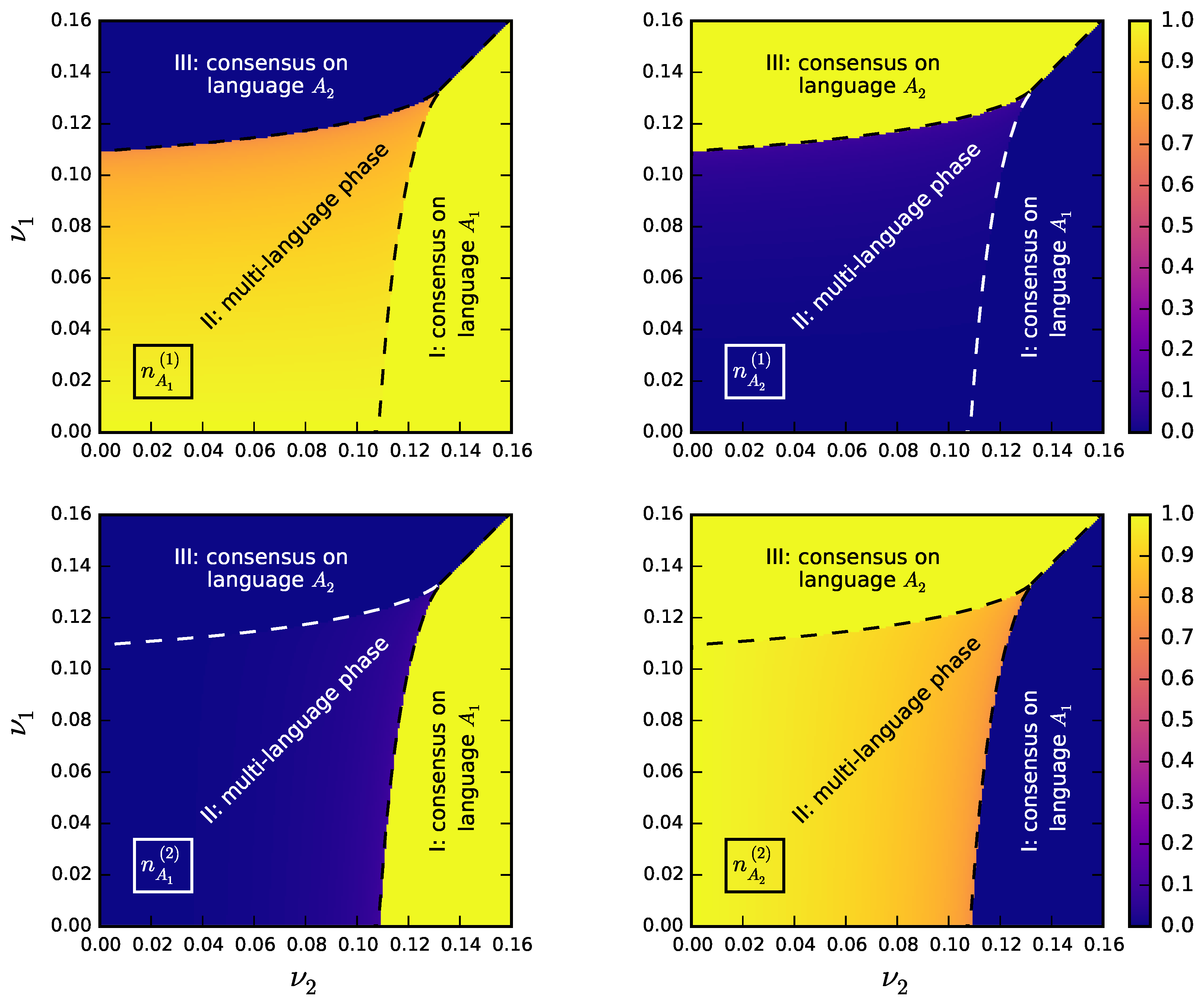
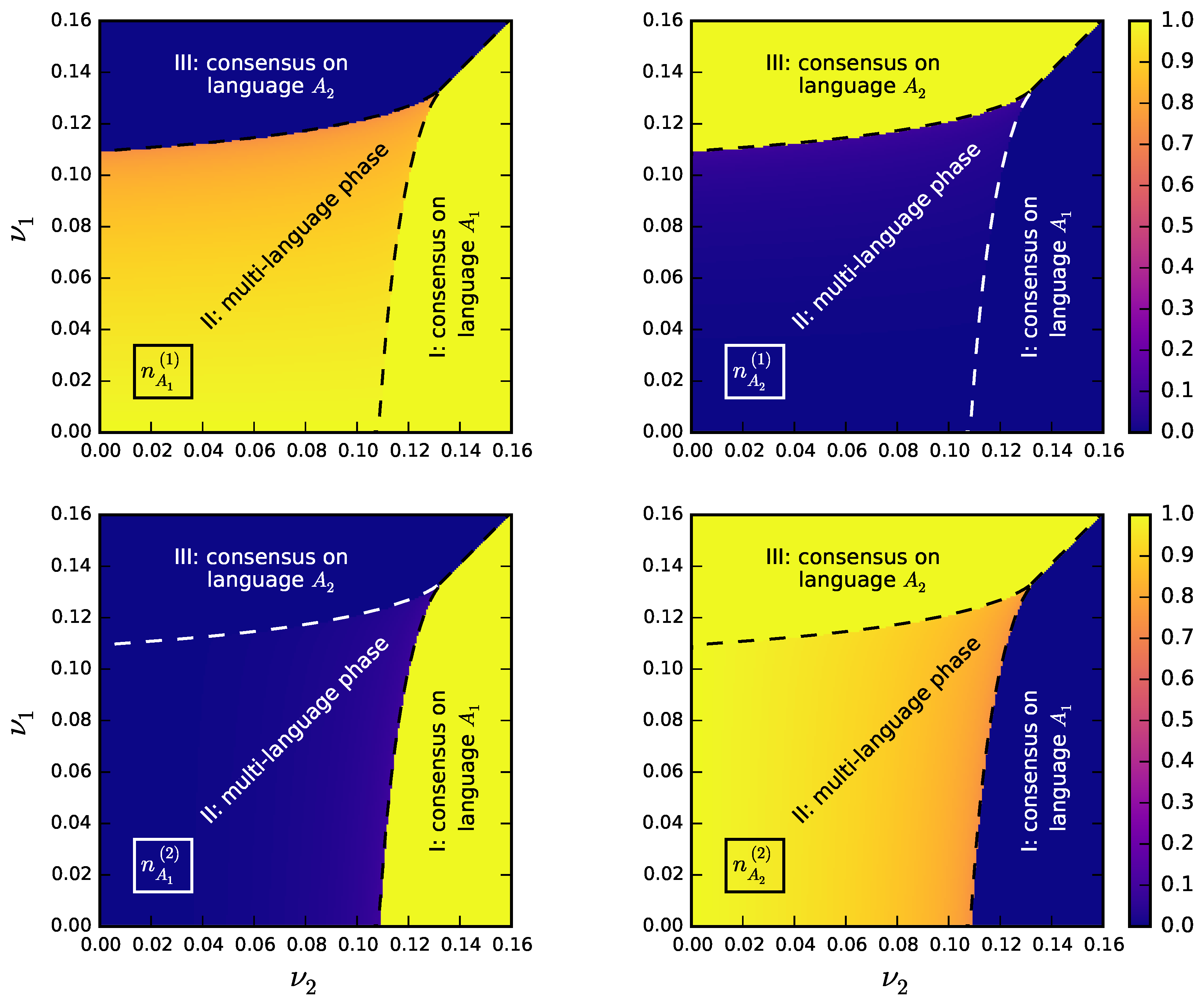
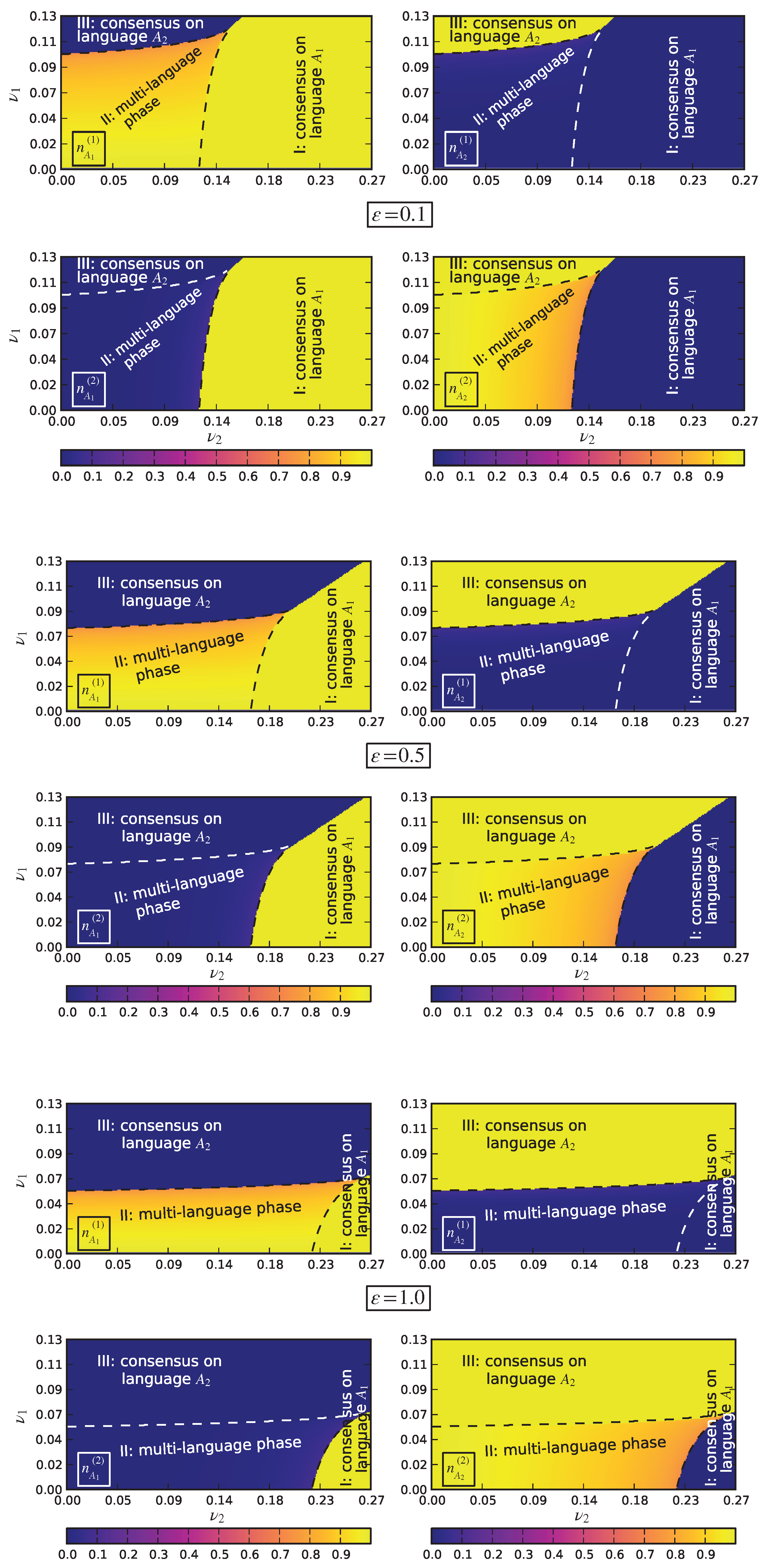
3.2. Phase Diagram for
4. Binary Dynamics in the Planted Partition Model with
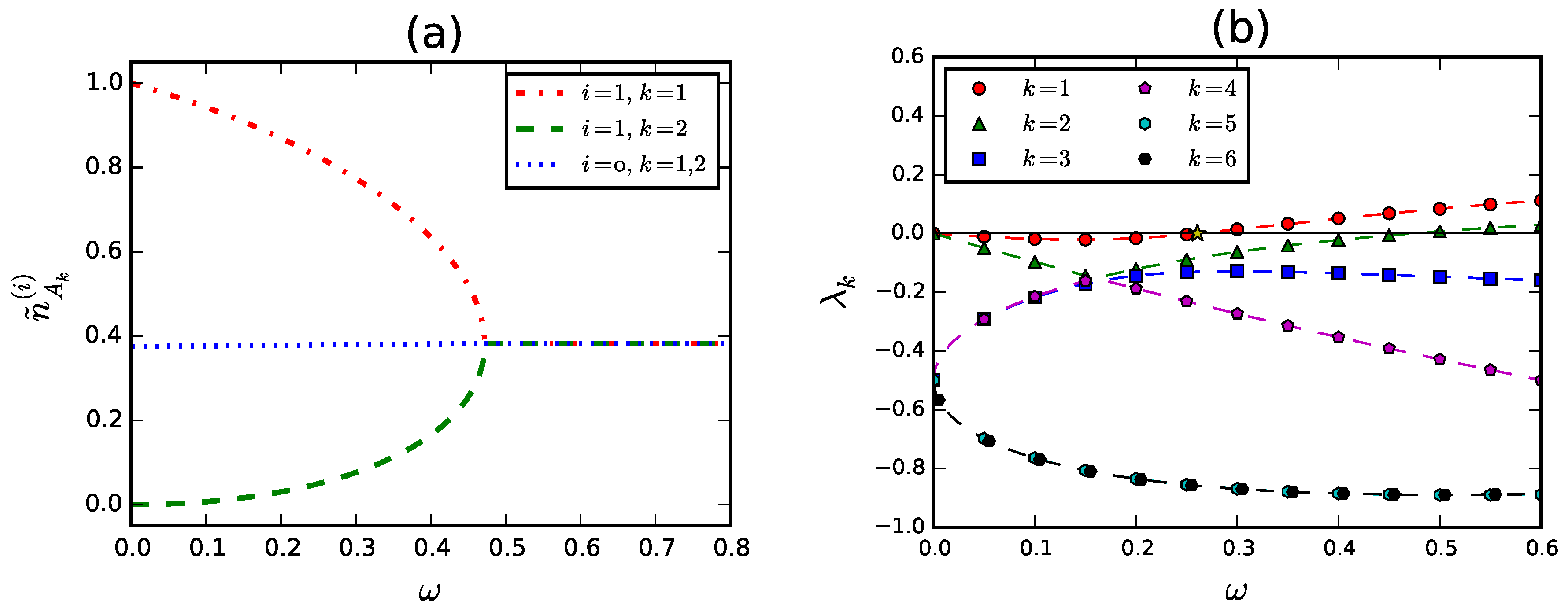
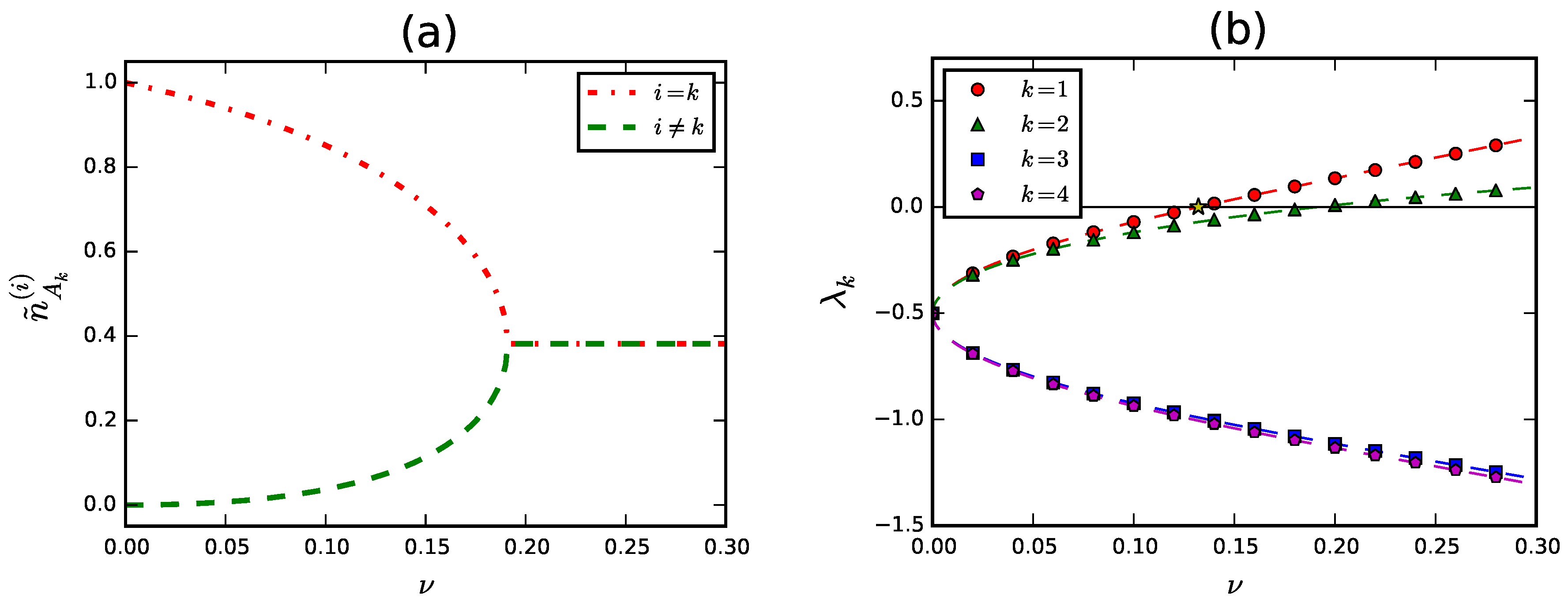
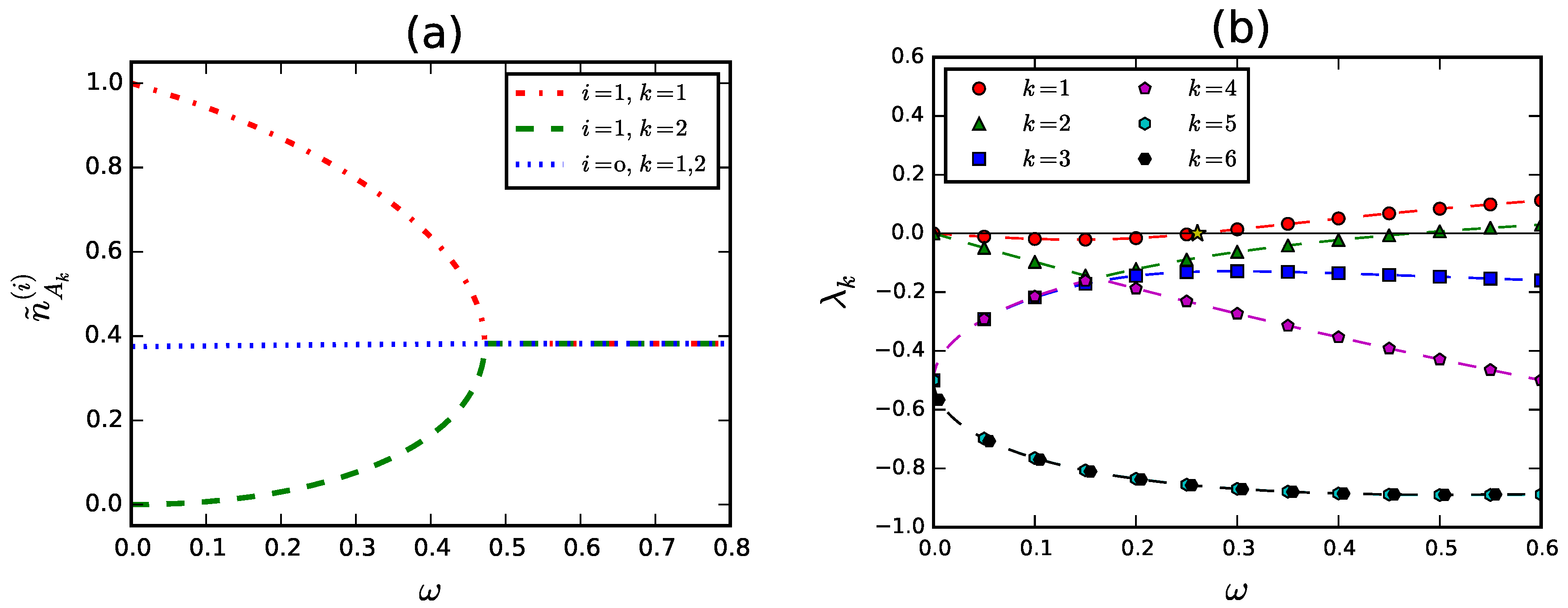
4.1. Stability of the Symmetric Steady Solution
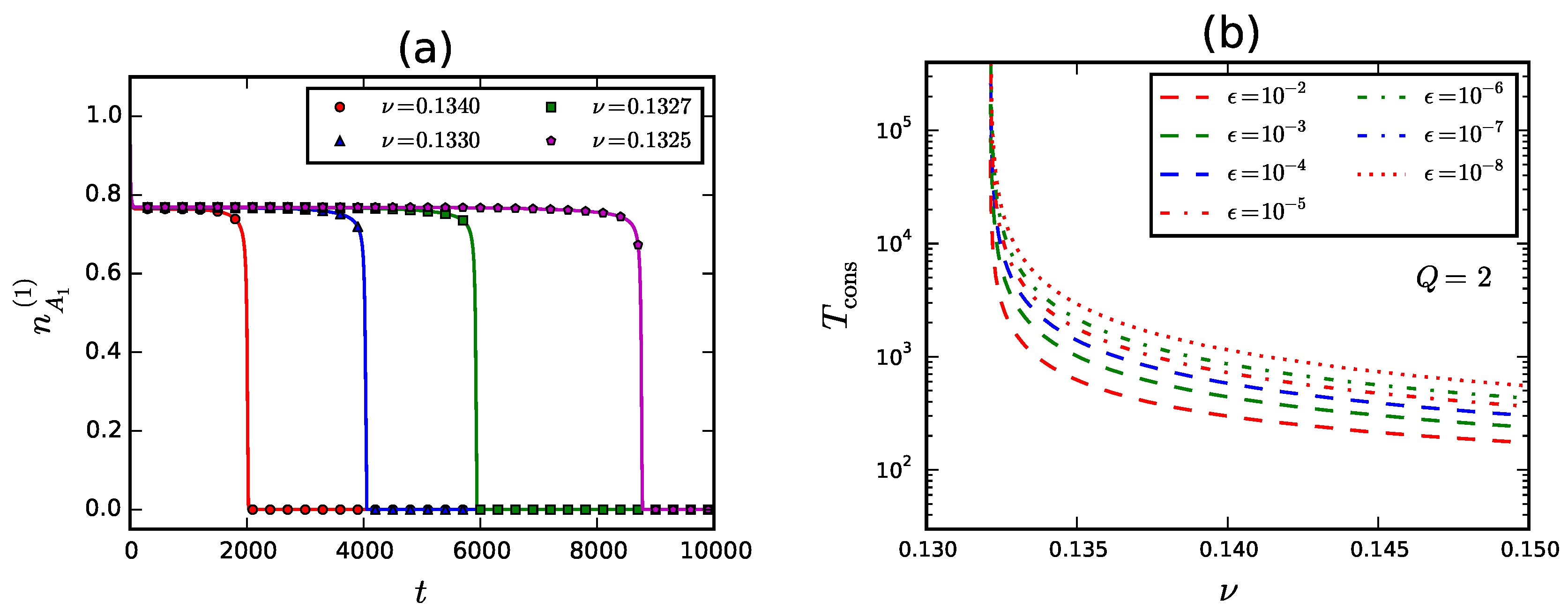
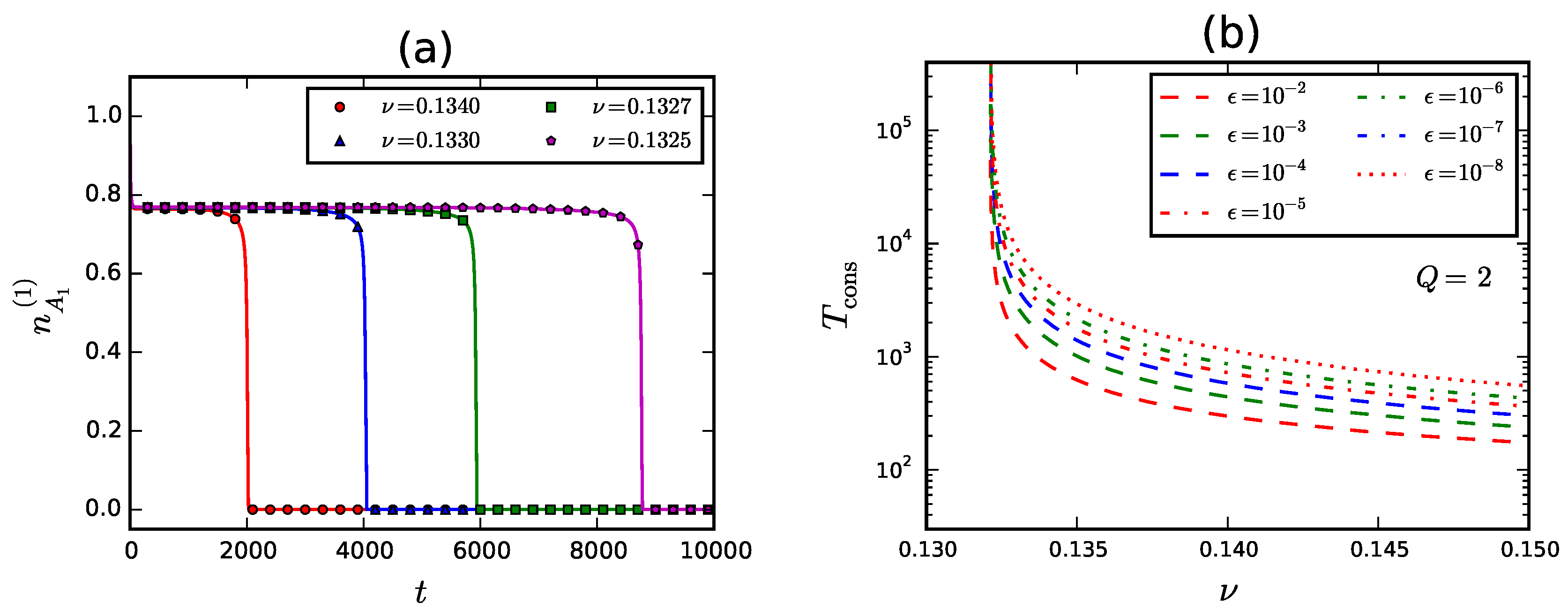
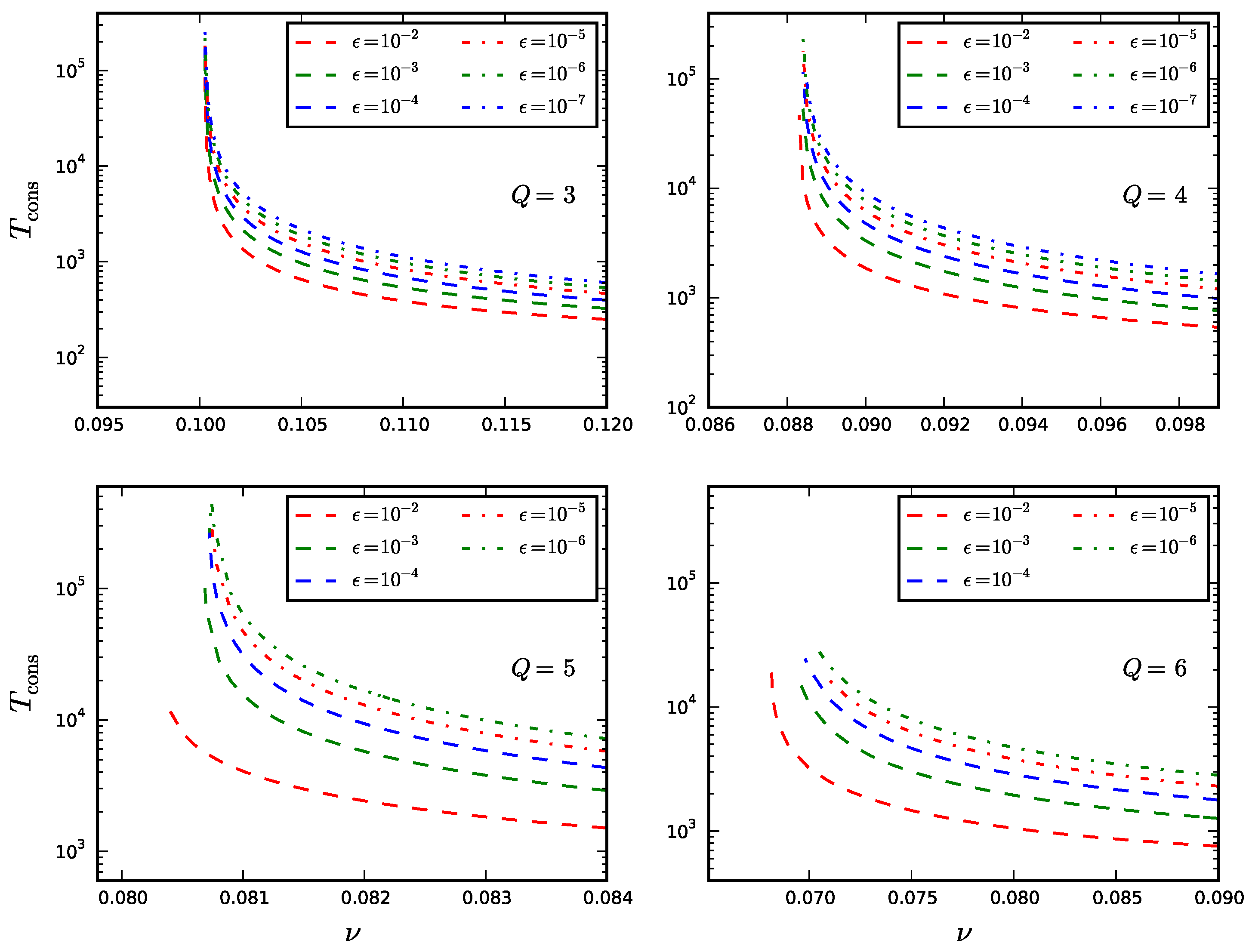
4.2. Numerical Integration of Mean Field Equations
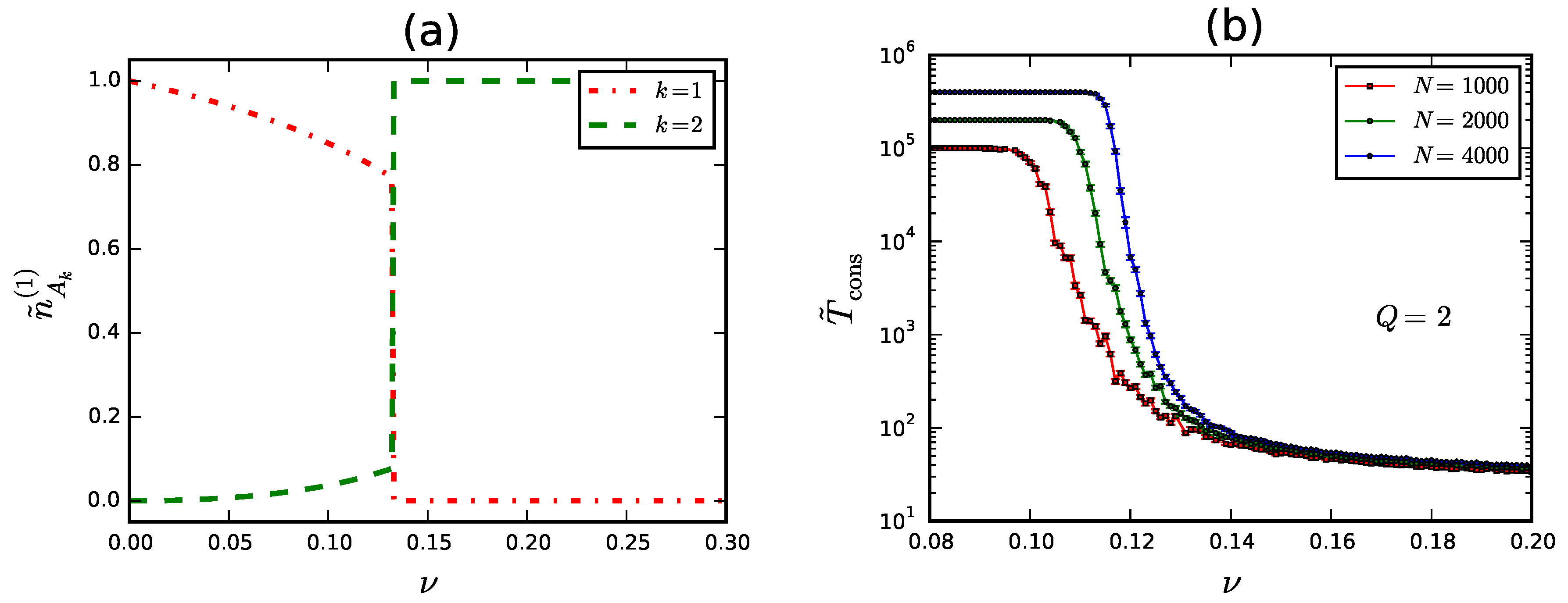
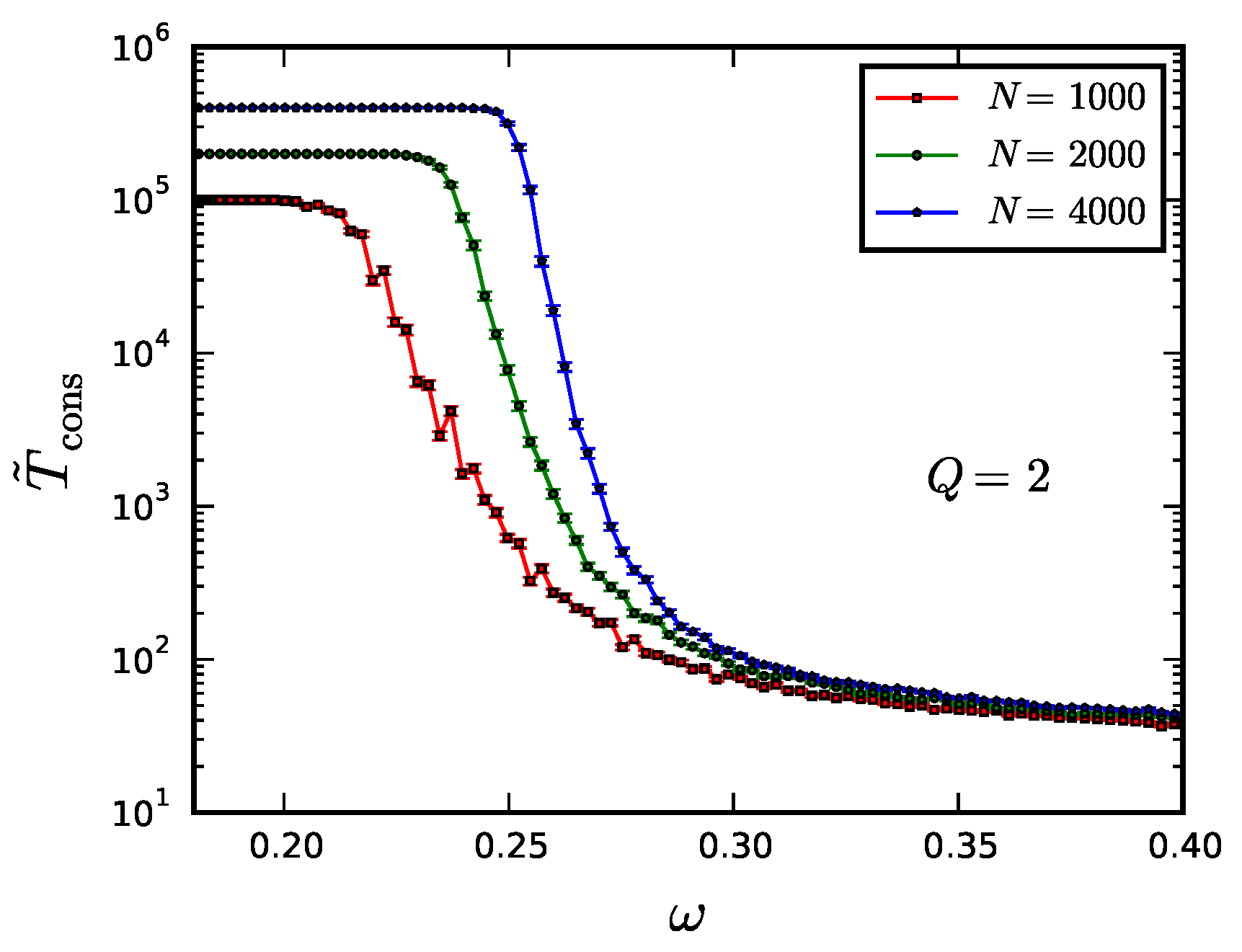
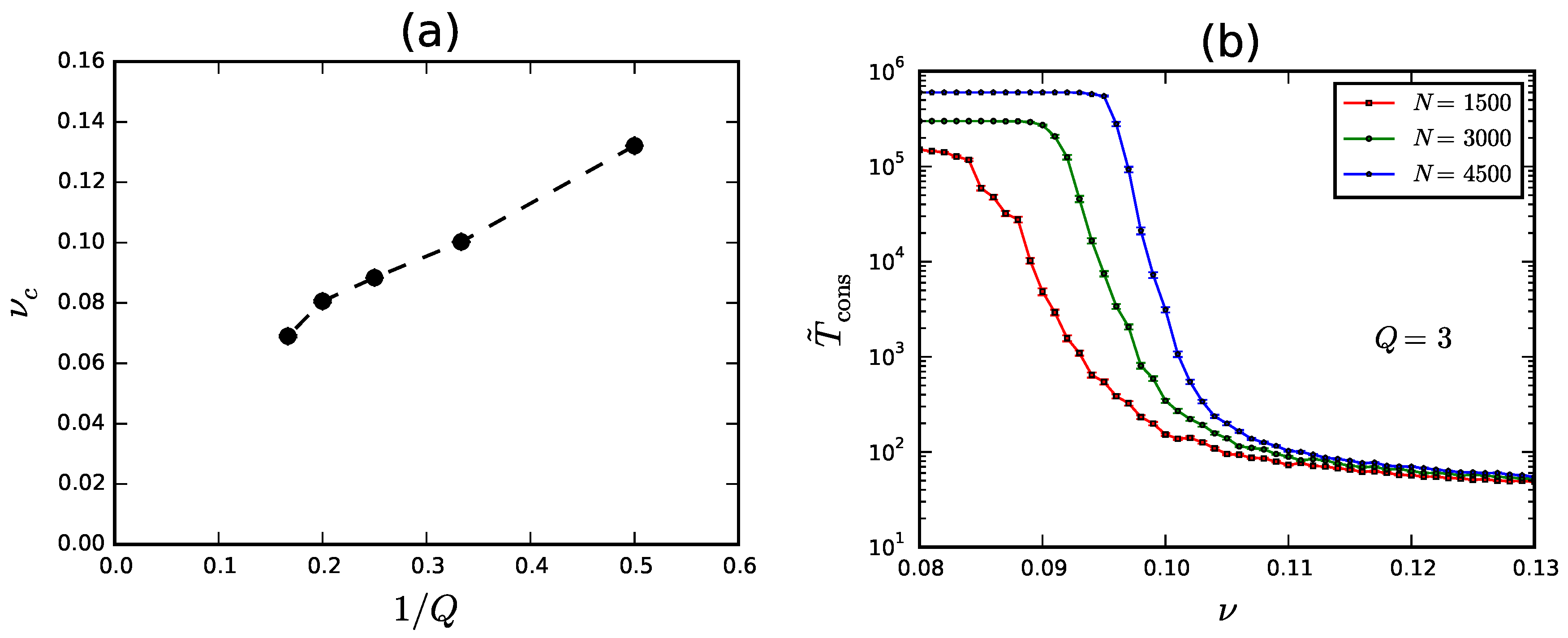
4.3. Finite Size Effects
5. Binary Naming Game on Two Overlapping Cliques
- (i)
- (ii)
- (iii)
- (iv)
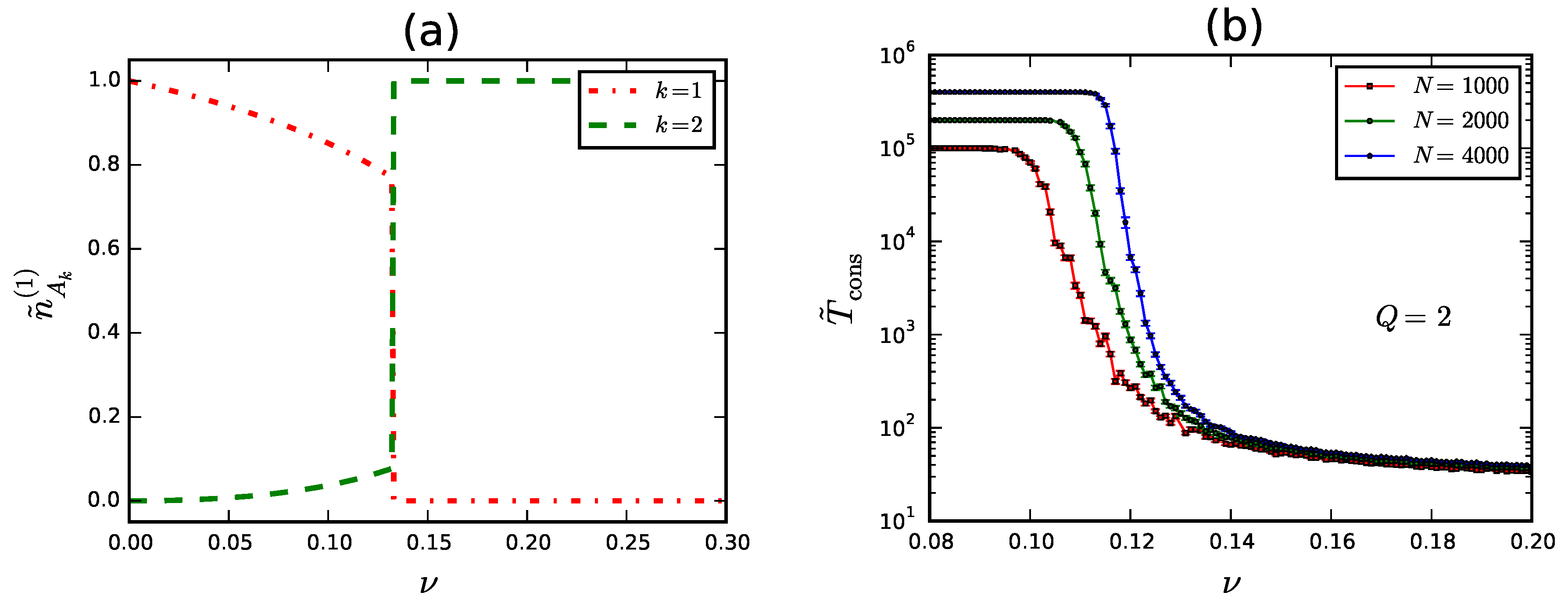
5.1. Stability of the Symmetric Steady Solution
5.2. Finite Size Effects
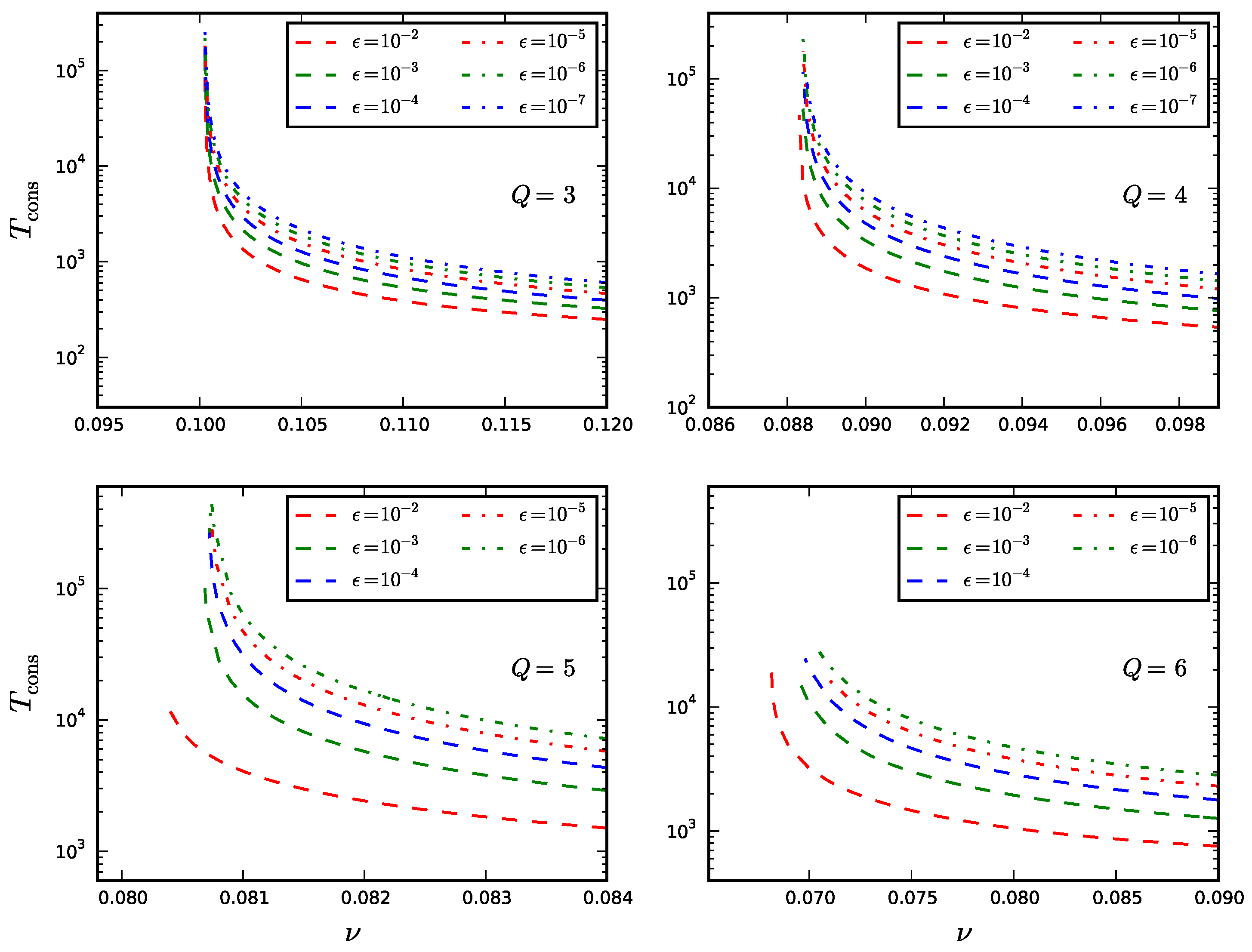
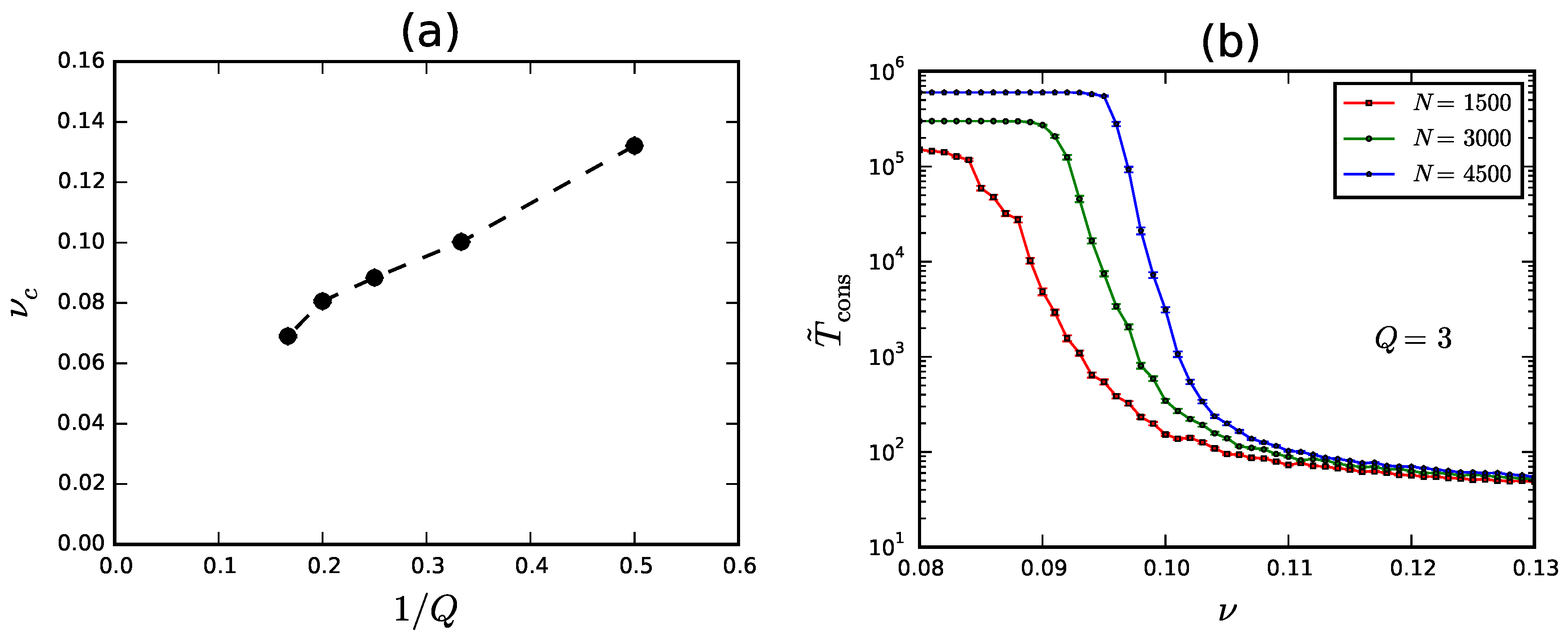
6. Dependence of upon in the Planted Partition Model
7. Effects Induced by a Change of the Relative Size of Communities
8. Dependence of upon the Topology of
- :
- we statically connect nodes belonging to different communities with probability ;
- :
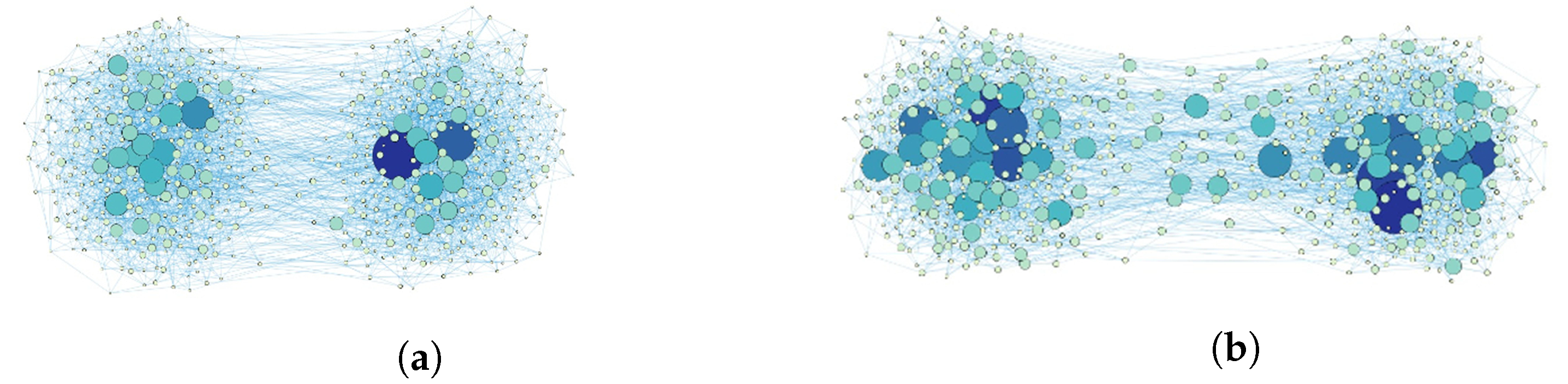
- starting with no inter-community links, we alternately choose at random a node belonging to one community and connect it to a target node belonging to the other one. The target node is chosen using a variant of preferential attachment where only inter-community links are taken into account when defining the target-node degree distribution. We stop the growth process as soon as . We end up with having a scale-free topology. Moreover, there is no inter-community assortativity, i.e., nodes with high inner degree in one community do not tend to attach preferably to nodes with high inner degree in the other one;
- :
- we generate inter-community links similar to , the only difference being that, concerning preferential attachment, both intra- and inter-community links are now taken into account when defining the target-node degree distribution. Again, develops a scale-free topology. Yet, there is inter-community assortativity in this case.
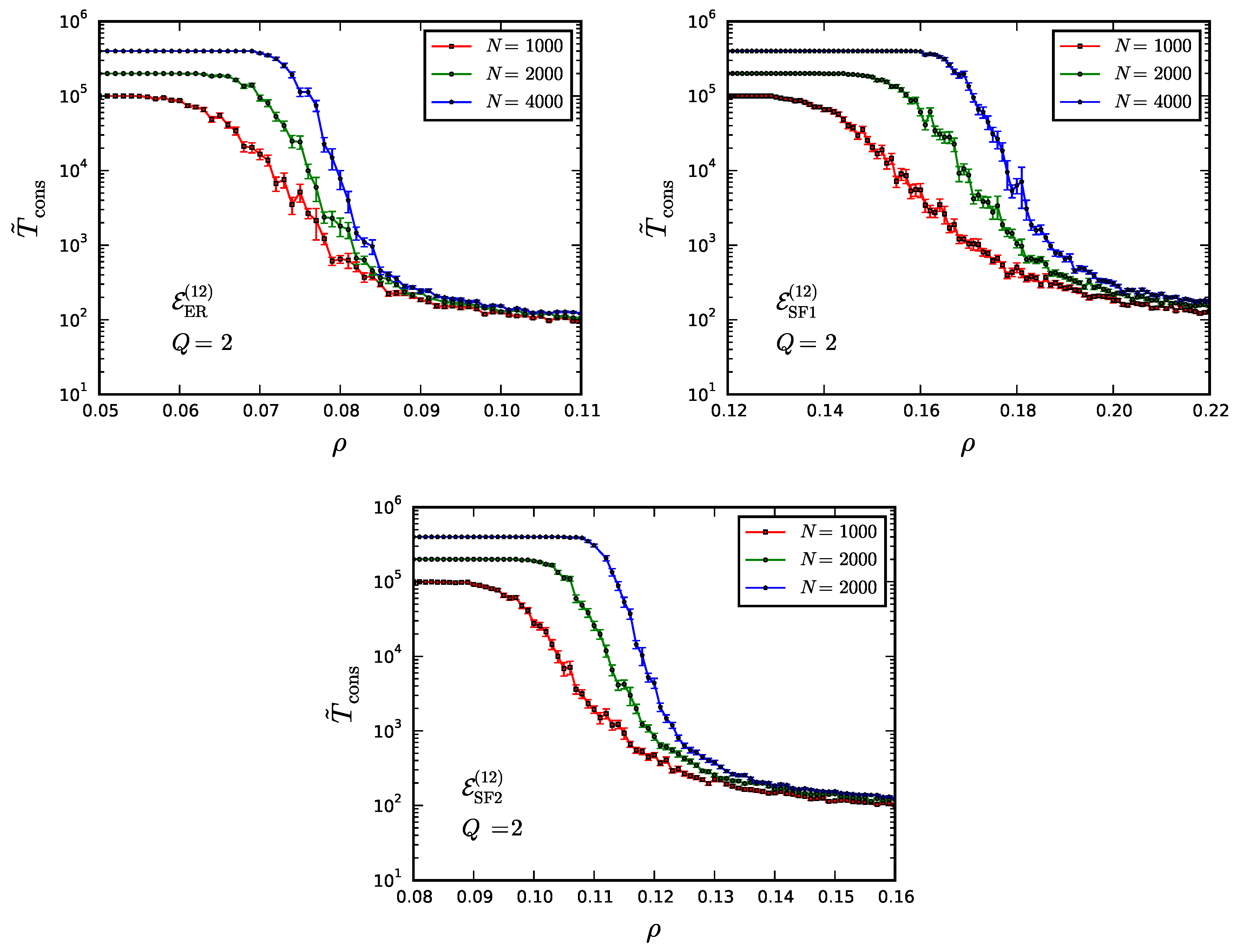
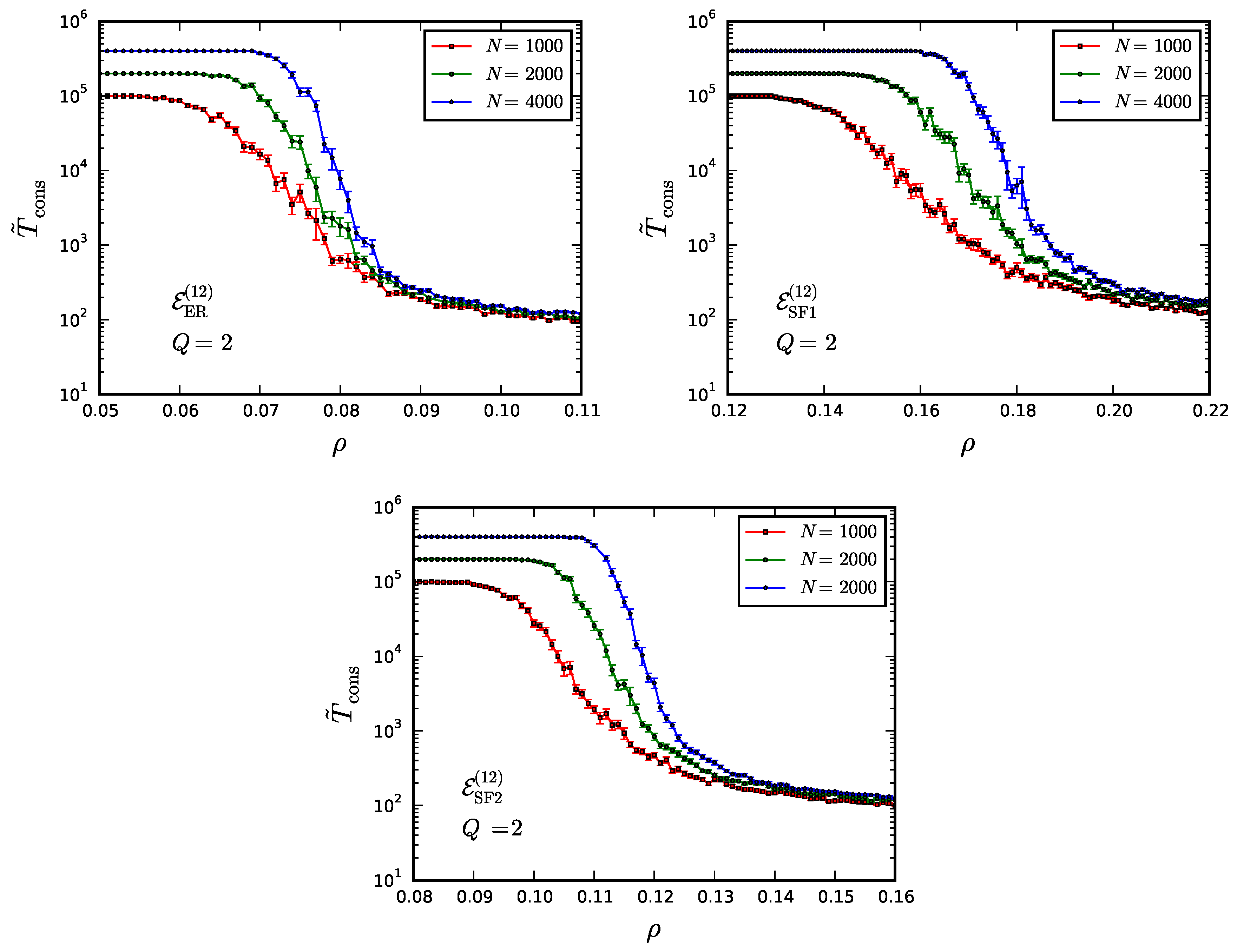
- The network model with differs from the PPM only in the internal structure of communities. A comparison of in these models suggests that BA communities yield a more efficient opinion spread than ER ones. We know from ref. [14] that for both BA and ER networks (with no community structure). This is not in contradiction with our finding, which concerns indeed the effectiveness by which fluctuations break consensus within communities.
- A comparison of in the network models with and suggests that BA communities yield a more efficient opinion spread when interacting via random than via scale-free links, provided the latter have no correlation with the internal degree distribution. In other words, the effectiveness by which fluctuations break local consensus is largely reduced when intra- and inter-community links are heterogeneously distributed with no correlation to each other.
- A comparison of in the network models with and shows that inter-community assortativity allows to restore the effectiveness by which fluctuations break local consensus. Indeed, is very close to the critical connectedness observed in the PPM.
9. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Derivation of MFEs in the SBM
- 1.Evidently, this name evokes the famous stone rediscovered near the town of Rashid (Rosetta, Egypt) by Napoleon’s army in 1799. The stone contained versions of the same text in Greek, Demotic and Hieroglyphic. As such, it served as a language translation tool.
- 2.With little effort we could consider generalizations where edges exist with probabilities for and/or . We prefer to restrict our study to symmetric cliques, as we wish to investigate how the overlap affects the multi-language phase of the NG in a simple set-up with no additional degree of freedom.
References
- Castellano, C.; Fortunato, S.; Loreto, V. Statistical physics of social dynamics. Rev. Mod. Phys. 2009, 81, 591–646. [Google Scholar] [CrossRef]
- Niyogi, P.; Berwick, R.C. Evolutionary Consequences of Language Learning. Linguist. Philos. 1997, 20, 697–719. [Google Scholar] [CrossRef]
- Nowak, M.A.; Krakauer, D.C. The evolution of language. Proc. Natl. Acad. Sci. USA 1999, 96, 8028–8033. [Google Scholar] [CrossRef] [PubMed]
- Nowak, M.A.; Plotkin, J.B.; Krakauer, D.C. The Evolutionary Language Game. J. Theor. Biol. 1999, 200, 147–162. [Google Scholar] [CrossRef] [PubMed]
- Nowak, M.A.; Komarova, N.L.; Niyogi, P. Evolution of Universal Grammar. Science 2001, 291, 114–118. [Google Scholar] [CrossRef] [PubMed]
- Smith, K.; Kirby, S.; Brighton, H. Iterated Learning: A Framework for the Emergence of Language. Artif. Life 2003, 9, 371–386. [Google Scholar] [CrossRef] [PubMed]
- Komarova, N.; Niyogi, P. Optimizing the mutual intelligibility of linguistic agents in a shared world. Artif. Intell. 2004, 154, 1–42. [Google Scholar] [CrossRef]
- Baronchelli, A.; Felici, M.; Caglioti, E.; Loreto, V.; Steels, L. Sharp transition towards shared vocabularies in multi-agent systems. J. Stat. Mech. Theory Exp. 2006, 2006, P06014. [Google Scholar] [CrossRef]
- Steels, L. A self-organizing spatial vocabulary. Artif. Life 1995, 2, 319–332. [Google Scholar] [CrossRef] [PubMed]
- Steels, L. Self-organizing vocabularies. In Artificial Life V; Proceedings of the Fifth International Workshop on the Synthesis and Simulation of Living Systems; Langton, C.G., Shimohara, K., Eds.; The MIT Press: Cambridge, MA, USA, 1997; pp. 179–184. [Google Scholar]
- Wittgenstein, L. Philosophical Investigations, 4th ed.; Wiley-Blackwell: Hoboken, NJ, USA, 2009. [Google Scholar]
- Baronchelli, A.; Dall’Asta, L.; Barrat, A.; Loreto, V. Strategies for fast convergence in semiotic dynamics. In Artif. Life X: Proceedings of the Tenth International Conference on the Simulation and Synthesis of Living Systems; Rocha, L.M., Ed.; The MIT Press: Cambridge, MA, USA, 2006; pp. 480–485. [Google Scholar]
- Baronchelli, A.; Dall’Asta, L.; Barrat, A.; Loreto, V. Topology-induced coarsening in language games. Phys. Rev. E 2006, 73, 015102. [Google Scholar] [CrossRef] [PubMed]
- Dall’Asta, L.; Baronchelli, A.; Barrat, A.; Loreto, V. Nonequilibrium dynamics of language games on complex networks. Phys. Rev. E 2006, 74, 036105. [Google Scholar] [CrossRef] [PubMed]
- Dall’Asta, L.; Baronchelli, A.; Barrat, A.; Loreto, V. Agreement dynamics on small-world networks. EPL 2006, 73, 969. [Google Scholar] [CrossRef]
- Baronchelli, A.; Dall’Asta, L.; Barrat, A.; Loreto, V. Bootstrapping communication in language games. In The Evolution of Language, Proceedings of the 6th International Conference (EVOLANG6); Cangelosi, A., Smith, A.D.M., Smith, K., Eds.; World Scientific Publishing Company: Singapore, 2006. [Google Scholar]
- Centola, D.; Baronchelli, A. The spontaneous emergence of conventions: An experimental study of cultural evolution. Proc. Natl. Acad. Sci. USA 2015, 112, 1989–1994. [Google Scholar] [CrossRef] [PubMed]
- Lu, Q.; Korniss, G.; Szymanski, B.K. The Naming Game in social networks: Community formation and consensus engineering. J. Econ. Interact. Coord. 2009, 4, 221–235. [Google Scholar] [CrossRef]
- Schaeffer, S.E. Graph clustering. Comp. Sci. Rev. 2007, 1, 27–64. [Google Scholar] [CrossRef]
- Porter, M.A.; Onnela, J.P.; Mucha, P.J. Communities in networks. Not. Am. Math. Soc. 2009, 56, 1082–1097. [Google Scholar]
- Fortunato, S. Community detection in graphs. Phys. Rep. 2010, 486, 75–174. [Google Scholar] [CrossRef]
- Coscia, M.; Giannotti, F.; Pedreschi, D. A Classification for Community Discovery Methods in Complex Networks. Stat. Anal. Data Min. 2011, 4, 512–546. [Google Scholar] [CrossRef]
- Newman, M. Networks: An Introduction; Oxford University Press, Inc.: Oxford, UK, 2010. [Google Scholar]
- Xie, J.; Kelley, S.; Szymanski, B.K. Overlapping Community Detection in Networks: The State-of-the-art and Comparative Study. ACM Comput. Surv. 2013, 45, 43. [Google Scholar] [CrossRef]
- Fortunato, S.; Hric, D. Community detection in networks: A user guide. Phys. Rep. 2016, 659, 1–44. [Google Scholar] [CrossRef]
- Gubanov, D.A.; Mikulich, L.I.; Naumkina, T.S. Language games in investigation of social networks: Finding communities and influential agents. Autom. Remote Control 2016, 77, 144–158. [Google Scholar] [CrossRef]
- Newman, M.E.J.; Girvan, M. Finding and evaluating community structure in networks. Phys. Rev. 2004, 69, 026113. [Google Scholar] [CrossRef] [PubMed]
- Lancichinetti, A.; Fortunato, S. Benchmarks for testing community detection algorithms on directed and weighted graphs with overlapping communities. Phys. Rev. E 2009, 80, 016118. [Google Scholar] [CrossRef] [PubMed]
- Girvan, M.; Newman, M.E.J. Community structure in social and biological networks. Proc. Natl. Acad. Sci. USA 2002, 99, 7821–7826. [Google Scholar] [CrossRef] [PubMed]
- Flake, G.W.; Lawrence, S.; Giles, C.L.; Coetzee, F.M. Self-organization and identification of Web communities. Computer 2002, 35, 66–70. [Google Scholar] [CrossRef]
- Lambiotte, R.; Ausloos, M. Coexistence of opposite opinions in a network with communities. J. Stat. Mech. Theory Exp. 2007, P08026. [Google Scholar] [CrossRef]
- Candia, J.; Mazzitello, K.I. Mass media influence spreading in social networks with community structure. J. Stat. Mech. Theory Exp. 2008, P07007. [Google Scholar] [CrossRef]
- Castelló, X.; Baronchelli, A.; Loreto, V. Consensus and ordering in language dynamics. Eur. Phys. J. B 2009, 71, 557–564. [Google Scholar] [CrossRef]
- Xie, J.; Sreenivasan, S.; Korniss, G.; Zhang, W.; Lim, C.; Szymanski, B.K. Social consensus through the influence of committed minorities. Phys. Rev. E 2011, 84, 011130. [Google Scholar] [CrossRef] [PubMed]
- Xie, J.; Emenheiser, J.; Kirby, M.; Sreenivasan, S.; Szymanski, B.K.; Korniss, G. Evolution of opinions on social networks in the presence of competing committed groups. PLoS ONE 2012, 7, e33215. [Google Scholar] [CrossRef] [PubMed]
- Palombi, F.; Toti, S. Stochastic dynamics of the multi-state voter model over a network based on interacting cliques and zealot candidates. J. Stat. Phys. 2014, 156, 336–367. [Google Scholar] [CrossRef]
- Mobilia, M. Does a Single Zealot Affect an Infinite Group of Voters? Phys. Rev. Lett. 2003, 91, 028701. [Google Scholar] [CrossRef] [PubMed]
- Mobilia, M.; Petersen, A.; Redner, S. On the role of zealotry in the voter model. J. Stat. Mech. Theory Exp. 2007, P08029. [Google Scholar] [CrossRef]
- Holland, P.W.; Laskey, K.B.; Leinhardt, S. Stochastic blockmodels: First steps. Soc. Netw. 1983, 5, 109–137. [Google Scholar] [CrossRef]
- Condon, A.; Karp, R.M. Algorithms for graph partitioning on the planted partition model. Random Struct. Algorithms 2001, 18, 116–140. [Google Scholar] [CrossRef]
- McSherry, F. Spectral partitioning of random graphs. In Proceedings of the 42nd IEEE Symposium on Foundations of Computer Science (FOCS), Las Vegas, NV, USA, 14–17 October 2001; pp. 529–537.
- Barabási, A.-L. Network Science; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Baronchelli, A.; Dall’Asta, L.; Barrat, A.; Loreto, V. Nonequilibrium phase transition in negotiation dynamics. Phys. Rev. E 2007, 76, 051102. [Google Scholar] [CrossRef] [PubMed]
- Arnold, V.I. Ordinary Differential Equations; The MIT Press: Cambridge, MA, USA, 1973. [Google Scholar]
- Atkinson, K.E. An Introduction to Numerical Analysis, 2nd ed.; Wiley India Pvt. Limited: New Delhi, India, 2008. [Google Scholar]
- Stanley, H.E. Introduction to Phase Transitions and Critical Phenomena; Oxford University Press: Oxford, UK, 1971. [Google Scholar]
- Dickman, R.; Vidigal, R. Quasi-stationary distributions for stochastic processes with an absorbing state. J. Phys. A 2002, 35, 1147. [Google Scholar] [CrossRef]
- Dickman, R. Numerical analysis of the master equation. Phys. Rev. E 2002, 65, 047701. [Google Scholar] [CrossRef] [PubMed]
- Dall’Asta, L.; Baronchelli, A. Microscopic activity patterns in the naming game. J. Phys. A 2006, 3, 14851. [Google Scholar] [CrossRef]
- Barabási, A.-L.; Réka, A. Emergence of scaling in random networks. Science 1999, 286, 509–512. [Google Scholar] [PubMed]
- Kamada, T.; Kawai, S. An algorithm for drawing general undirected graphs. Inf. Process. Lett. 1989, 31, 7–15. [Google Scholar] [CrossRef]
- Pastor-Satorras, R.; Vespignani, A. Epidemic spreading in scale-free networks. Phys. Rev. Lett. 2001, 86, 3200–3203. [Google Scholar] [CrossRef] [PubMed]
- Pastor-Satorras, R.; Vespignani, A. Epidemic dynamics and endemic states in complex networks. Phys. Rev. E 2001, 63, 066117. [Google Scholar] [CrossRef] [PubMed]
- Ponti, G.; Palombi, F.; Abate, D.; Ambrosino, F.; Aprea, G.; Bastianelli, T.; Beone, F.; Bertini, R.; Bracco, G.; Caporicci, M.; et al. The role of medium size facilities in the HPC ecosystem: The case of the new CRESCO4 cluster integrated in the ENEAGRID infrastructure. In Proceedings of the 2014 International Conference on High Performance Computing and Simulation—HPCS2014, Bologna, Italy, 21–25 July 2014; pp. 1030–1033.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Before Interaction | After Interaction | Conditional Transition Rates | |||
|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | ||
| 0 | 0 | 0 | |||
| 0 | 0 | 0 | |||
| 0 | 0 | 0 | |||
| 0 | 0 | 0 | 0 | ||
| 0 | 0 | 0 | |||
| 0 | 0 | 0 | |||
| 0 | 0 | 0 | |||
| 0 | 0 | ||||
| 0 | 0 | 0 | |||
| 0 | 0 | 0 | |||
| 0 | 0 | ||||
| Q | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
| no. of phases | 3 | 10 | 41 | 196 | 1057 | 6322 | 41,393 |
| ϵ | |||
|---|---|---|---|
| 8.214(1) | 0.1321161(2) | 0.74205(3) | |
| 6.537(1) | 0.1321222(2) | 0.86468(3) | |
| 6.920(1) | 0.1321227(2) | 0.90872(3) | |
| 7.729(1) | 0.1321228(2) | 0.93087(3) | |
| 8.523(1) | 0.1321228(2) | 0.94602(3) | |
| 9.730(1) | 0.1321229(2) | 0.95210(3) | |
| 10.790(1) | 0.1321229(2) | 0.95840(3) |
| 0.087(1) | 0.187(5) | 0.127(4) | |
| β | 1.45(5) | 1.50(9) | 1.62(8) |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palombi, F.; Toti, S. Topological Aspects of the Multi-Language Phases of the Naming Game on Community-Based Networks. Games 2017, 8, 12. https://doi.org/10.3390/g8010012
Palombi F, Toti S. Topological Aspects of the Multi-Language Phases of the Naming Game on Community-Based Networks. Games. 2017; 8(1):12. https://doi.org/10.3390/g8010012
Chicago/Turabian StylePalombi, Filippo, and Simona Toti. 2017. "Topological Aspects of the Multi-Language Phases of the Naming Game on Community-Based Networks" Games 8, no. 1: 12. https://doi.org/10.3390/g8010012