Variance of Fluctuating Radar Echoes from Thermal Noise and Randomly Distributed Scatterers


Abstract
:1. Introduction
2. Signal Statistics of Meteorological Targets and Noise


3. The Estimators







4. An Example Based on Noise Measurements from a Civil Marine Radar
5. Conclusions
List of Symbols
| M | Total number of available samples. |
| N | Equivalent number of independent samples. |
| P | Echo power. |
| P0 | Mean echo power. |
| u(x) | Step function, defined as 1 if x ≥ 0, and 0 otherwise. |
| L | Power logarithmic Level in dBm (that is, the reference value is set to 1 mW) |
| ln(x) | Natural logarithm of x. |
| L0 | Level of the mean echo power. |
| Log(x) | Base-10 logarithm of x. |
| Pi | Echo power sample. |
| Li | Level of the echo power sample (dBm). |
| {β}ML | Maximum likelihood estimate of the parameter β. |
| E | Mean value of an estimator. |
| σ | Standard deviation of an estimator. |
| EML | Mean value of the Log-transformed ML estimator. |
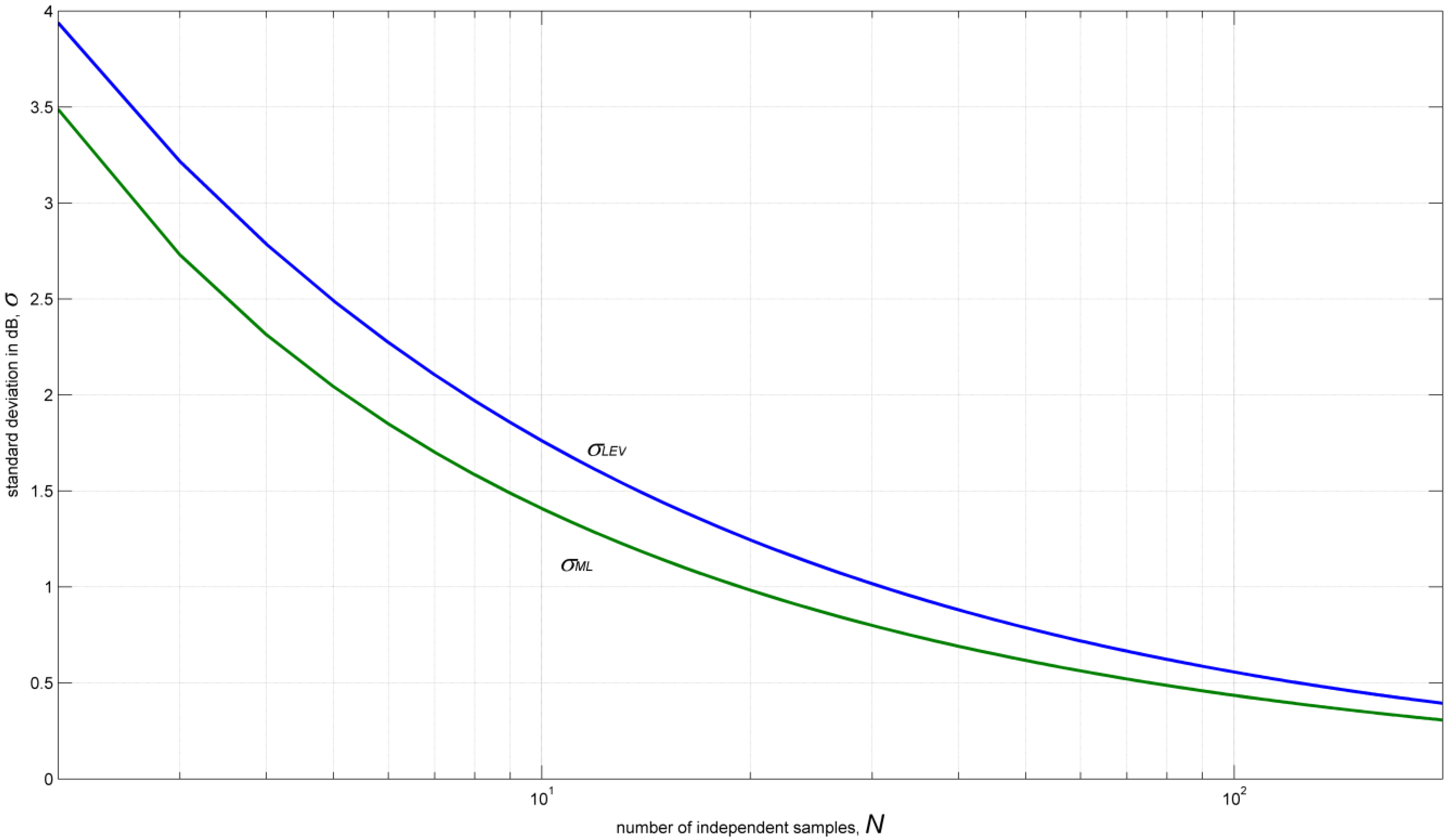
| σML | Standard deviation of the Log-transformed ML estimator. |
| EL | Mean value of the level samples based estimator |
| σL | Standard deviation of the level samples based estimator. |
| Λ | Euler’s constant. |
| ζ(p,q) | Riemann’s zeta function. |
Acknowledgments
Conflicts of Interest
References
- Doviak, R.J.; Zrnic, D.S. Doppler Radar and Weather Observations, 2nd ed.; Academic Press: Waltham, MA, USA, 1993. [Google Scholar]
- Marshall, J.S.; Hitschfeld, W. Interpretation of the fluctuating echoes from randomly distributed scatterers, Part I. Can. J. Phys. 1953, 31, 962–994. [Google Scholar] [CrossRef]
- Wallace, P.R. Interpretation of the fluctuating echoes from randomly distributed scatterers, Part II. Can. J. Phys. 1953, 31, 995–1009. [Google Scholar] [CrossRef]
- Smith, P.L. Interpretation of the Fluctuating Echo from Randomly Distributed Scatterers, Part III. In Proceedings of the 12th Conference on Radar Meteorology, Norman, OK, USA, 17–20 October, 1966.
- Rayleigh, J.W.S.B. The Theory of Sound; Macmillan: London, UK, 1877; Volume I, Reprinted version, in 1945 by Dover Publications; p. 984. [Google Scholar]
- Kerr, D.E.; Goldstein, H. Radar Target and Echoes. In Propagation of Short Radio Waves, 2nd ed.; Kerr, D.E., Ed.; Peter Peregrinus Ltd. on behalf of The Institution of Electrical Engineers: Stevenage, UK, 1987. [Google Scholar]
- Gradshteyn, I.S.; Ryzhik, I.M. Tables of Integrals, and Products; Academic Press: Waltham, MA, USA, 1980; p. 1156. [Google Scholar]
- Zrnic, D.S. Moments of estimated input power for finite sample averages of radar receiver outputs. IEEE Trans. Aerosp. Electron. Syst. 1975, 11, 109–113. [Google Scholar] [CrossRef]
- Gabella, M.; Notarpietro, R.; Turso, S.; Perona, G. Simulated and measured X-band radar reflectivity of land in mountainous terrain using a fan-beam antenna. Int. J. Remote Sens. 2008, 29, 2869–2878. [Google Scholar] [CrossRef]
Appendix
A1. Mean and Variance of the Log-Transformed Maximum Likelihood Estimator


 has the following probability distribution function:
has the following probability distribution function:

 , where:
, where:

A2. Computation of I1


{kind=link}
A3. Computation of I2



A4. Conclusions


© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Gabella, M. Variance of Fluctuating Radar Echoes from Thermal Noise and Randomly Distributed Scatterers. Atmosphere 2014, 5, 92-100. https://doi.org/10.3390/atmos5010092
Gabella M. Variance of Fluctuating Radar Echoes from Thermal Noise and Randomly Distributed Scatterers. Atmosphere. 2014; 5(1):92-100. https://doi.org/10.3390/atmos5010092
Chicago/Turabian StyleGabella, Marco. 2014. "Variance of Fluctuating Radar Echoes from Thermal Noise and Randomly Distributed Scatterers" Atmosphere 5, no. 1: 92-100. https://doi.org/10.3390/atmos5010092