Using a Backpropagation Artificial Neural Network to Predict Nutrient Removal in Tidal Flow Constructed Wetlands

 , ,
, ,
Abstract
:1. Introduction
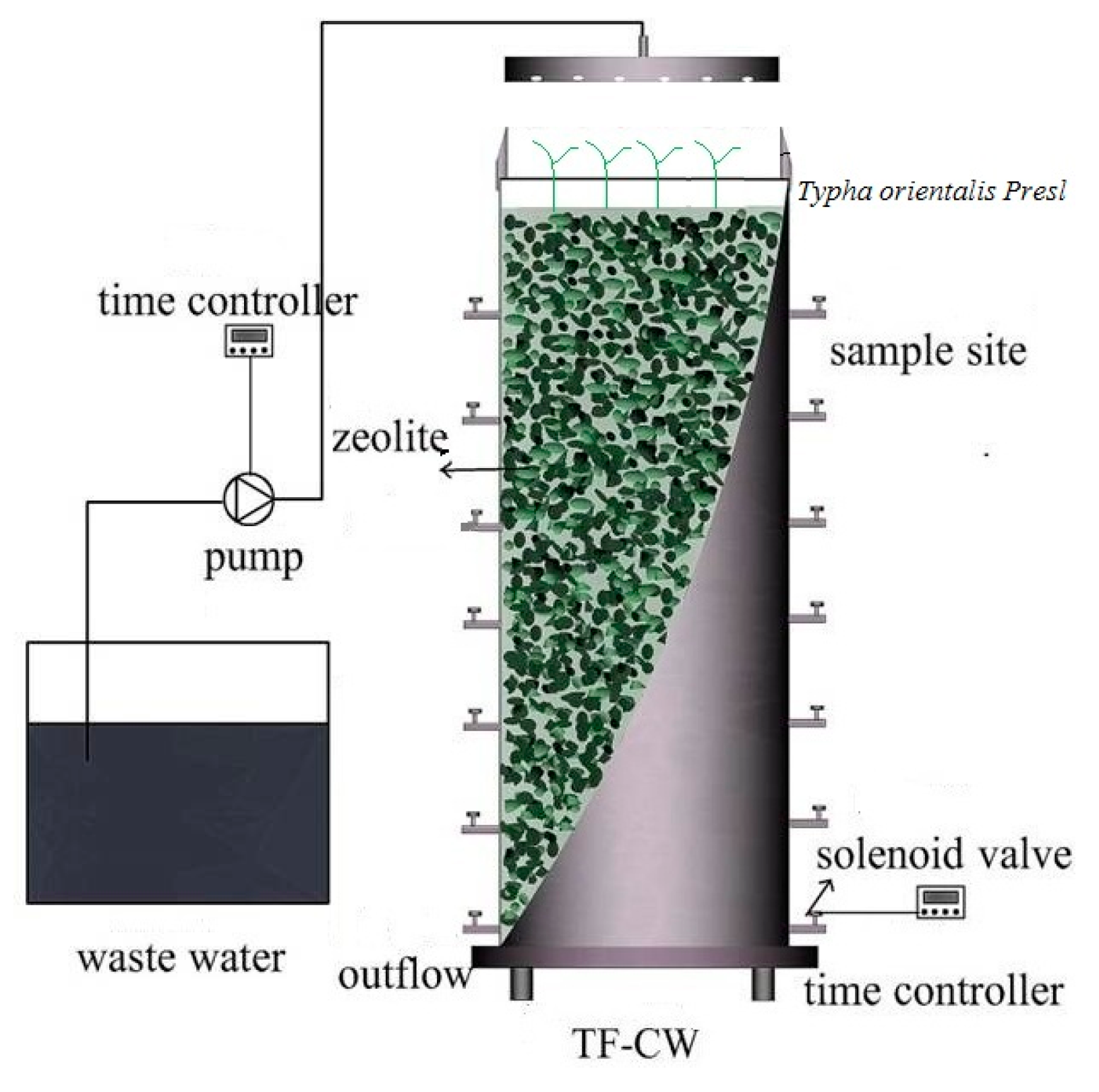
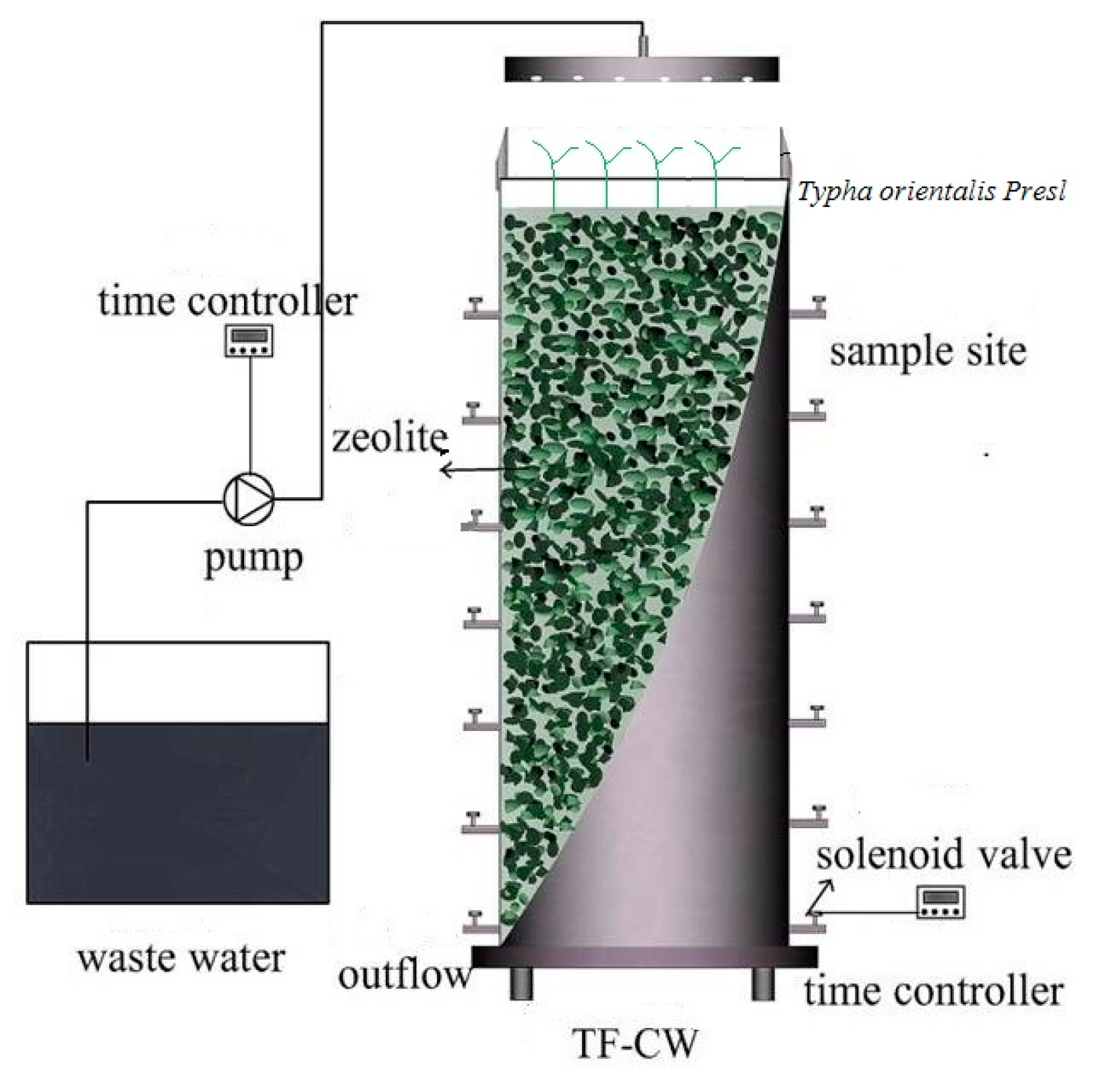
2. Materials and Methods
3. Results and Discussion
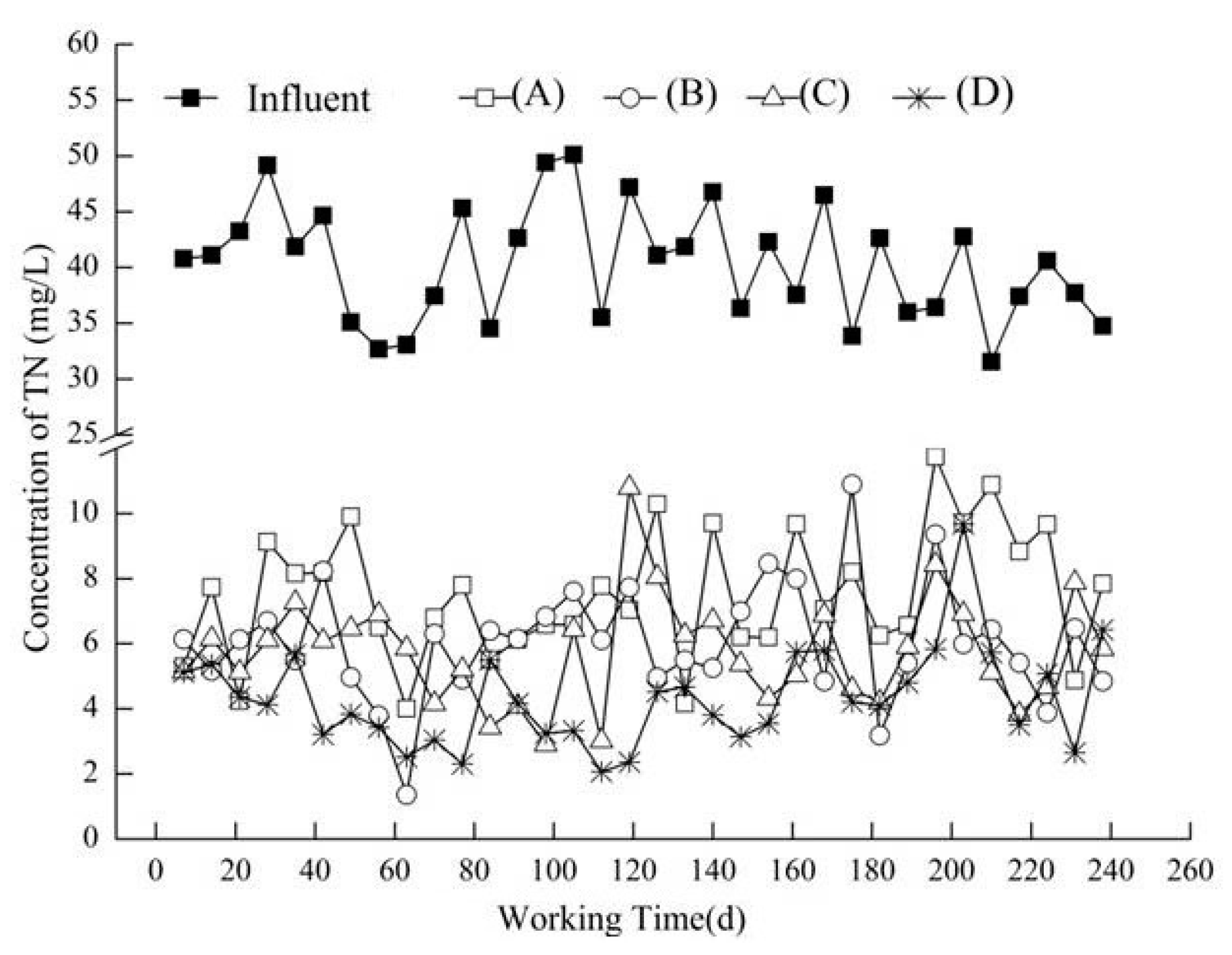
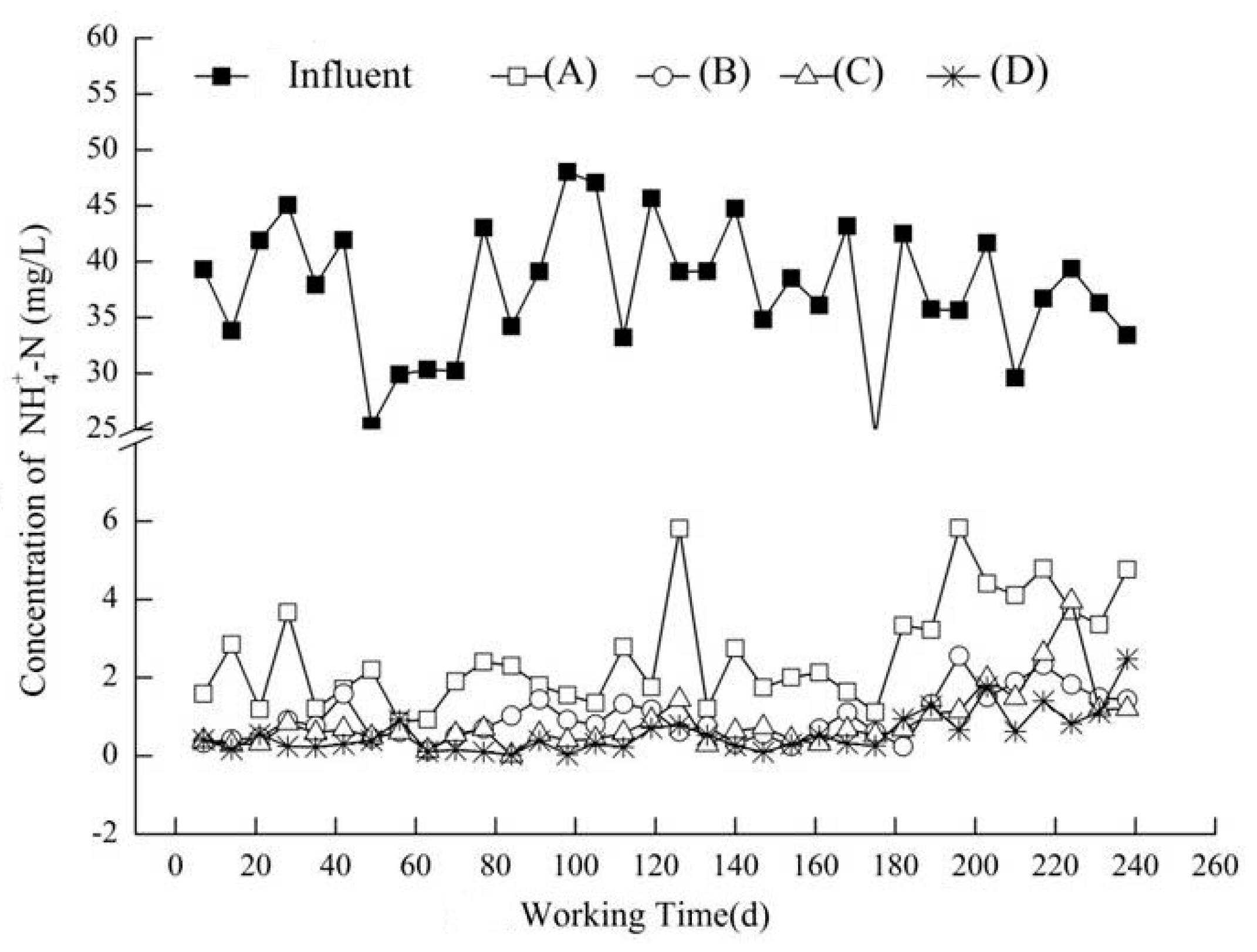
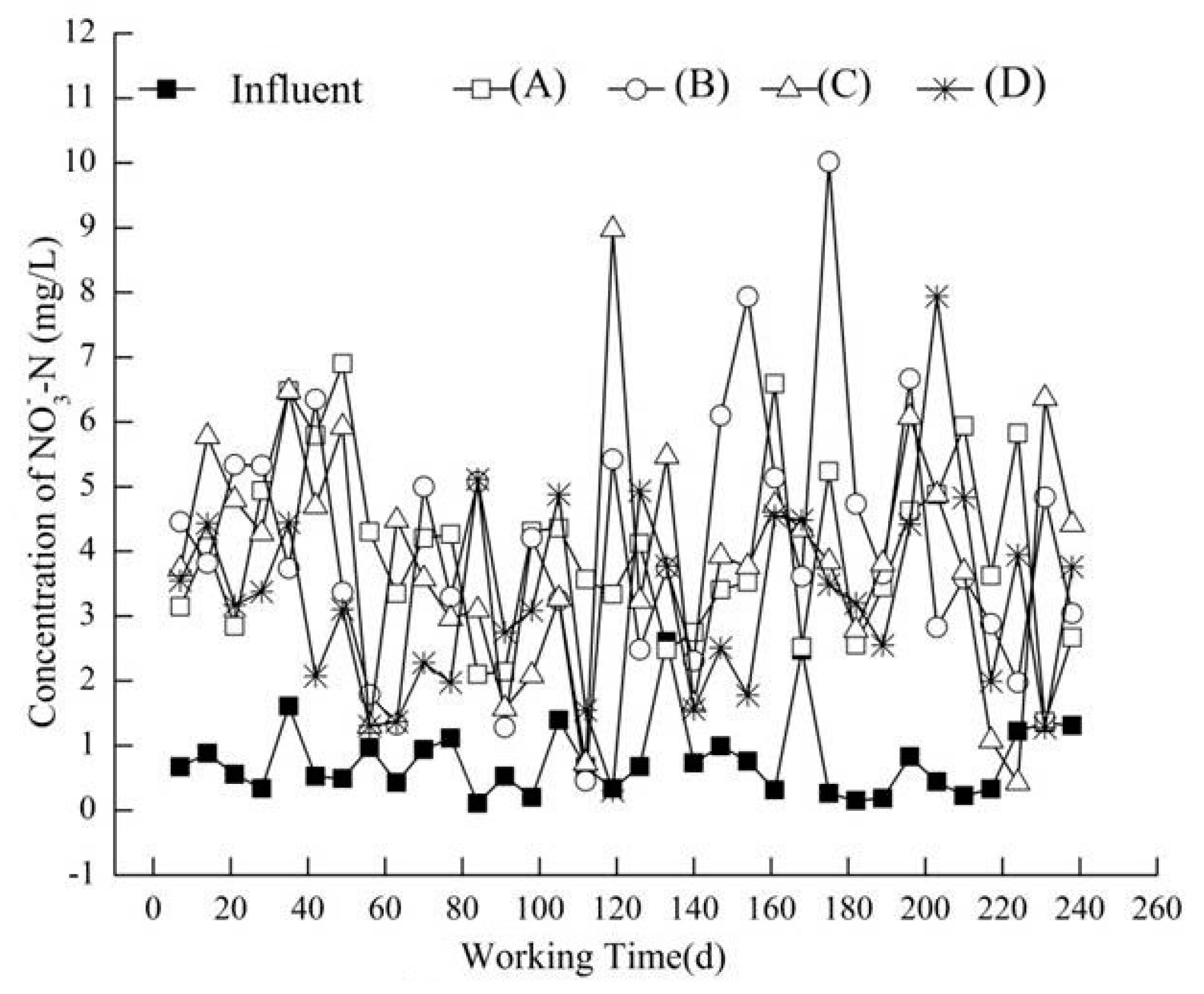
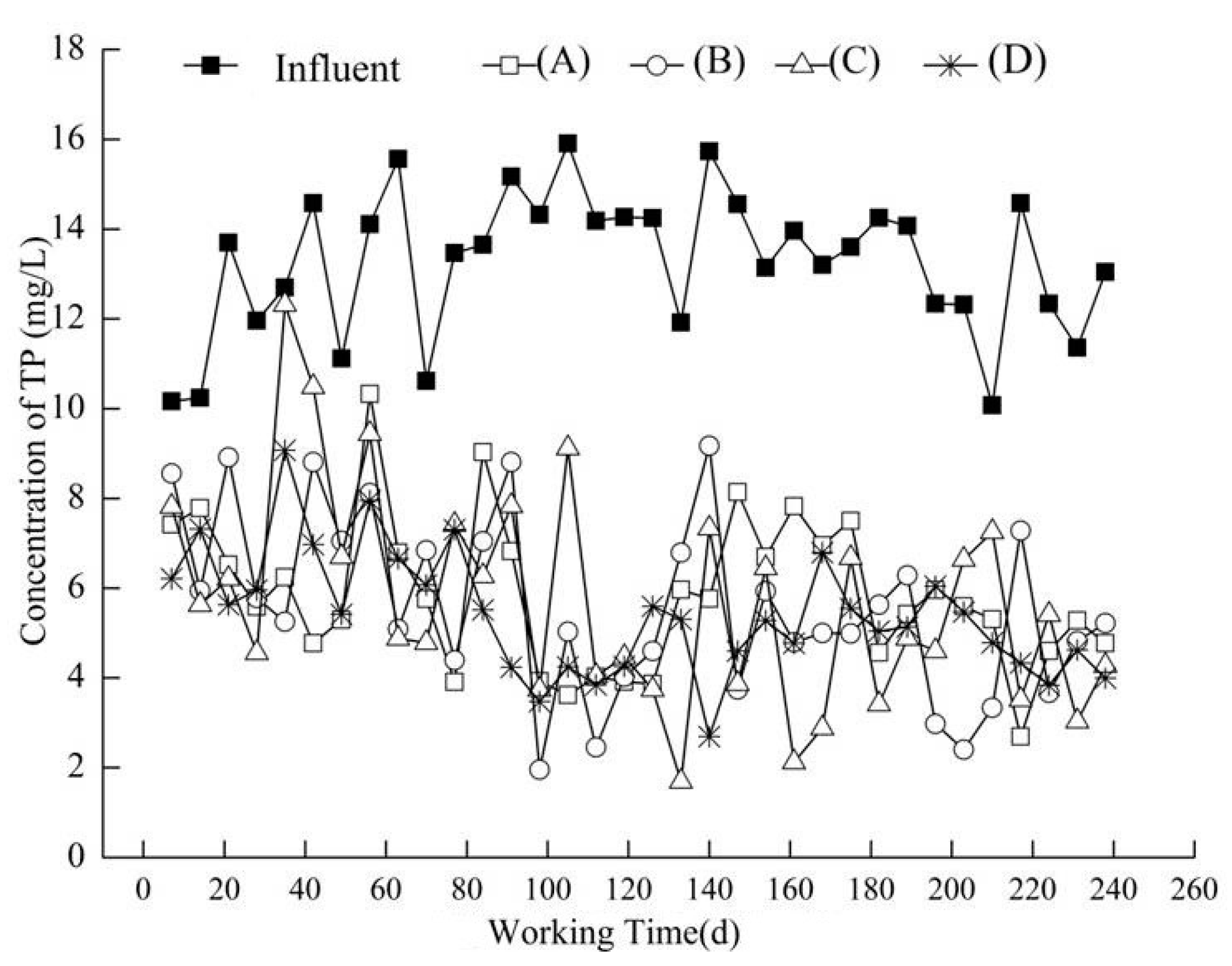
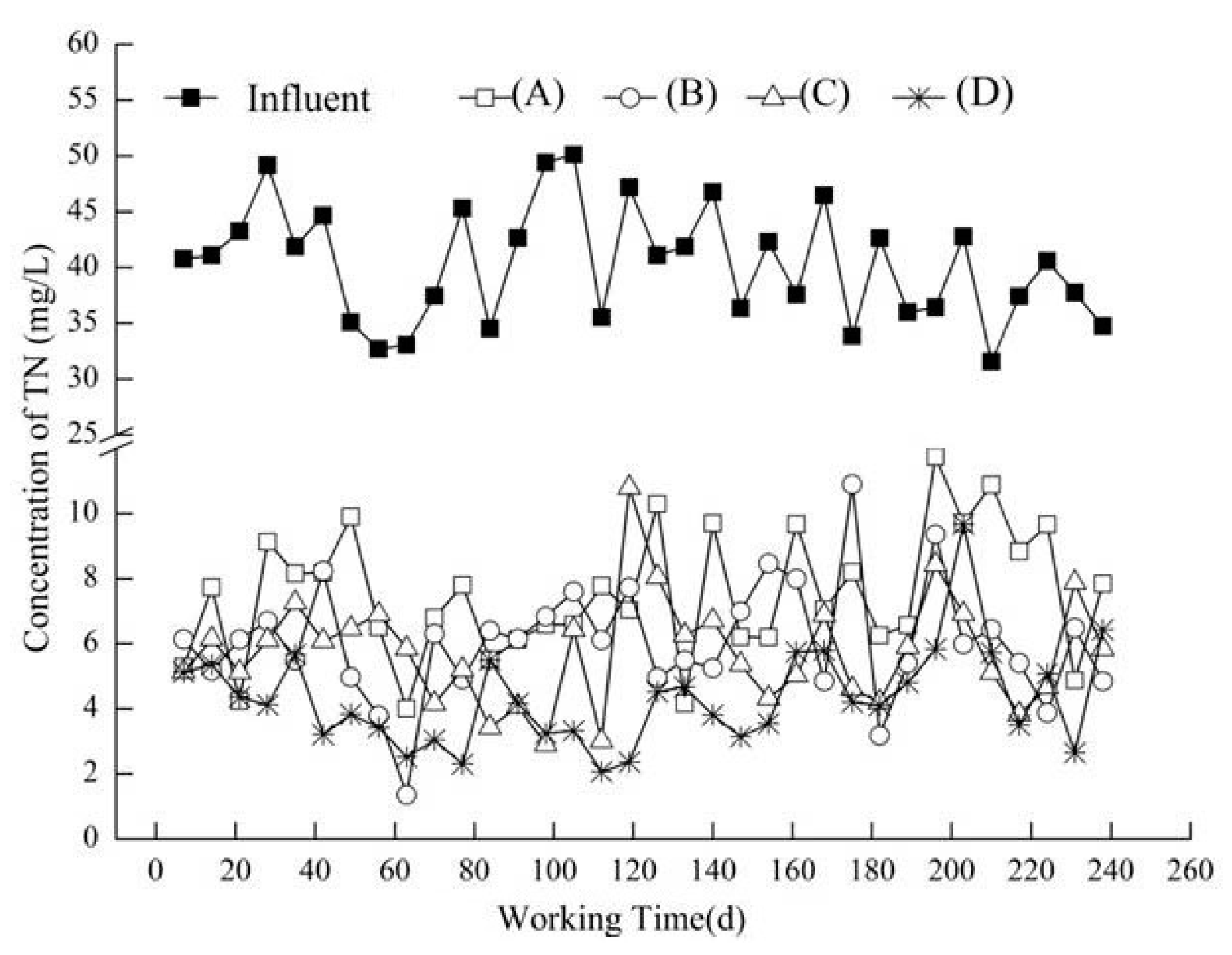
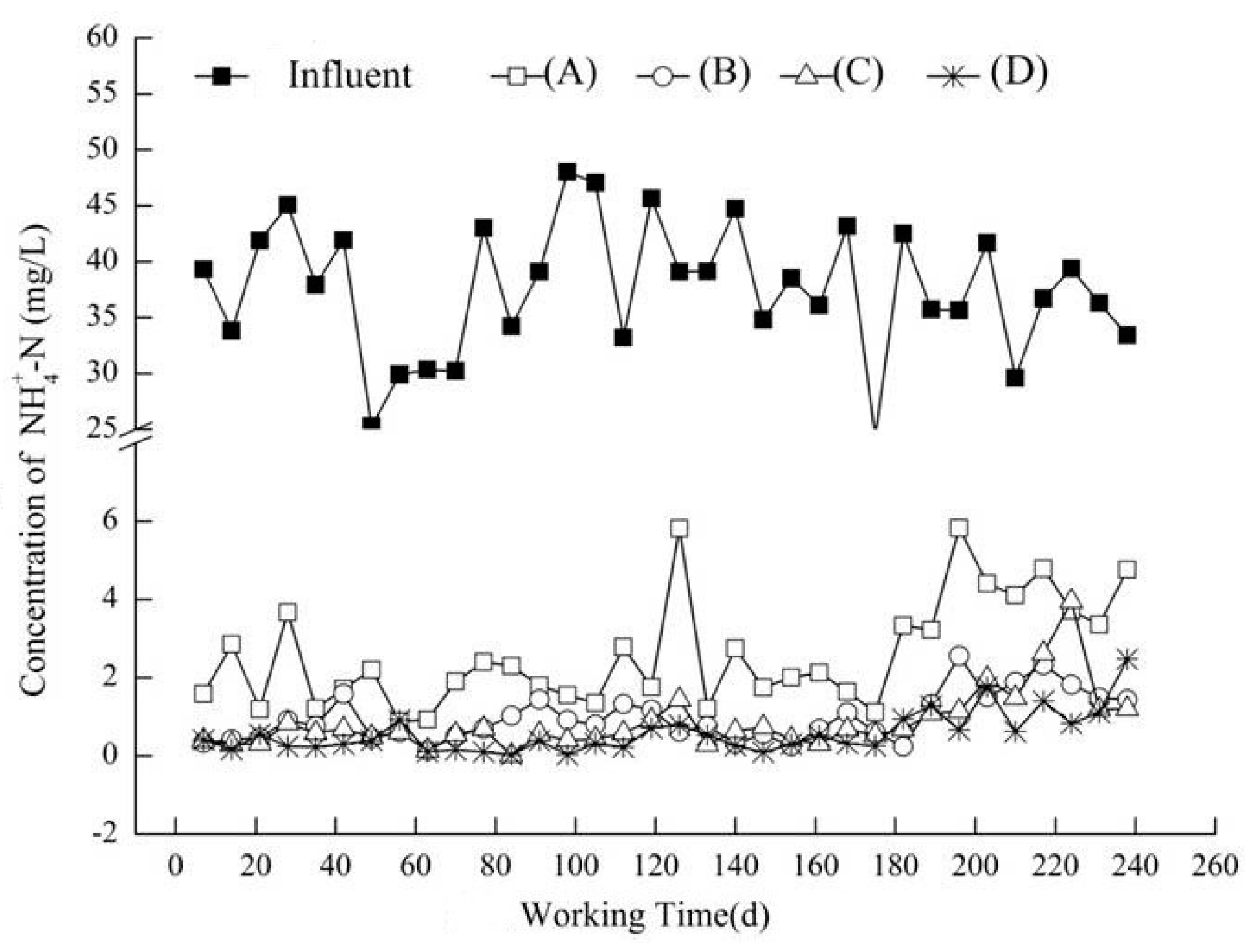
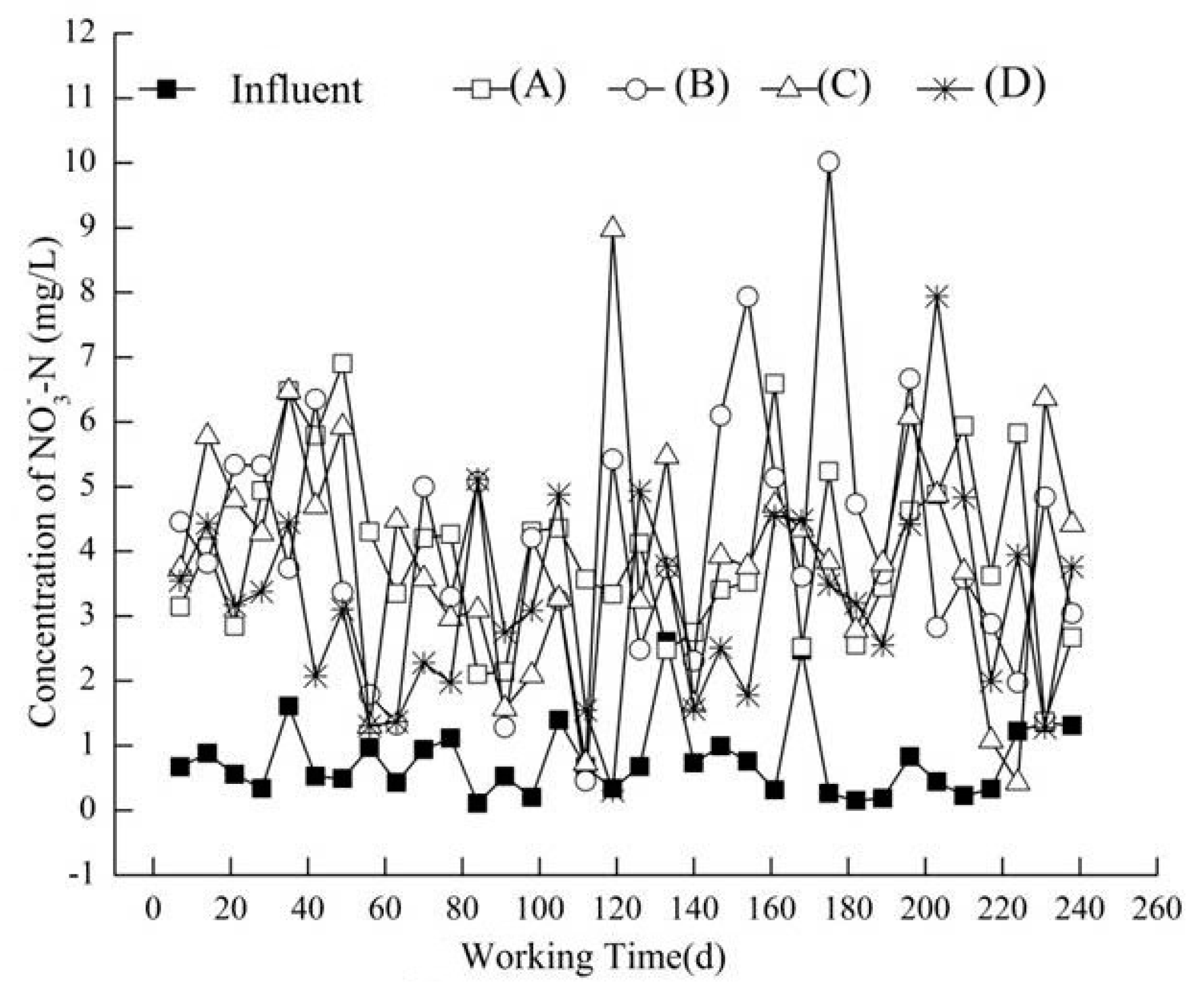
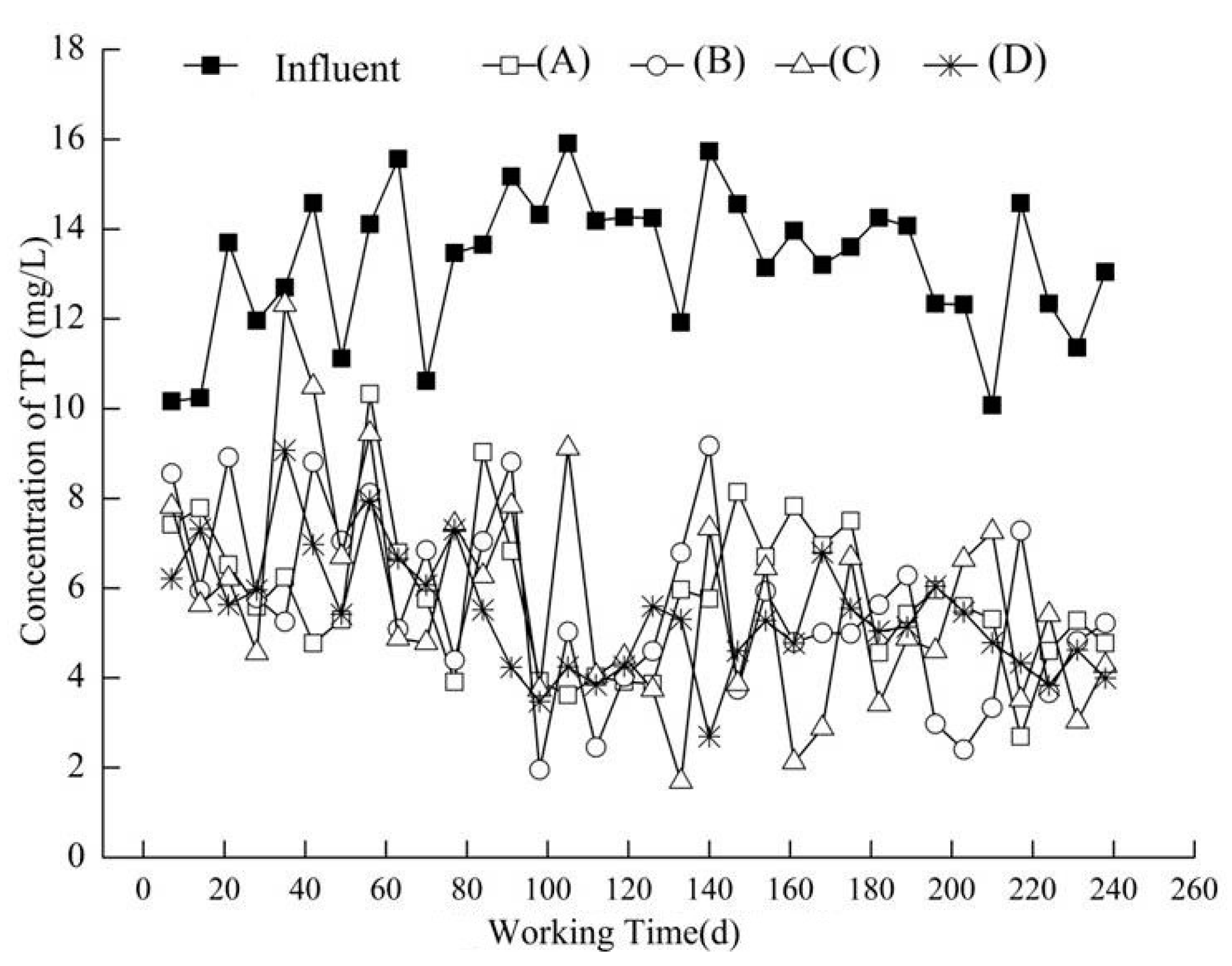
3.1. Nutrient Removal Effect
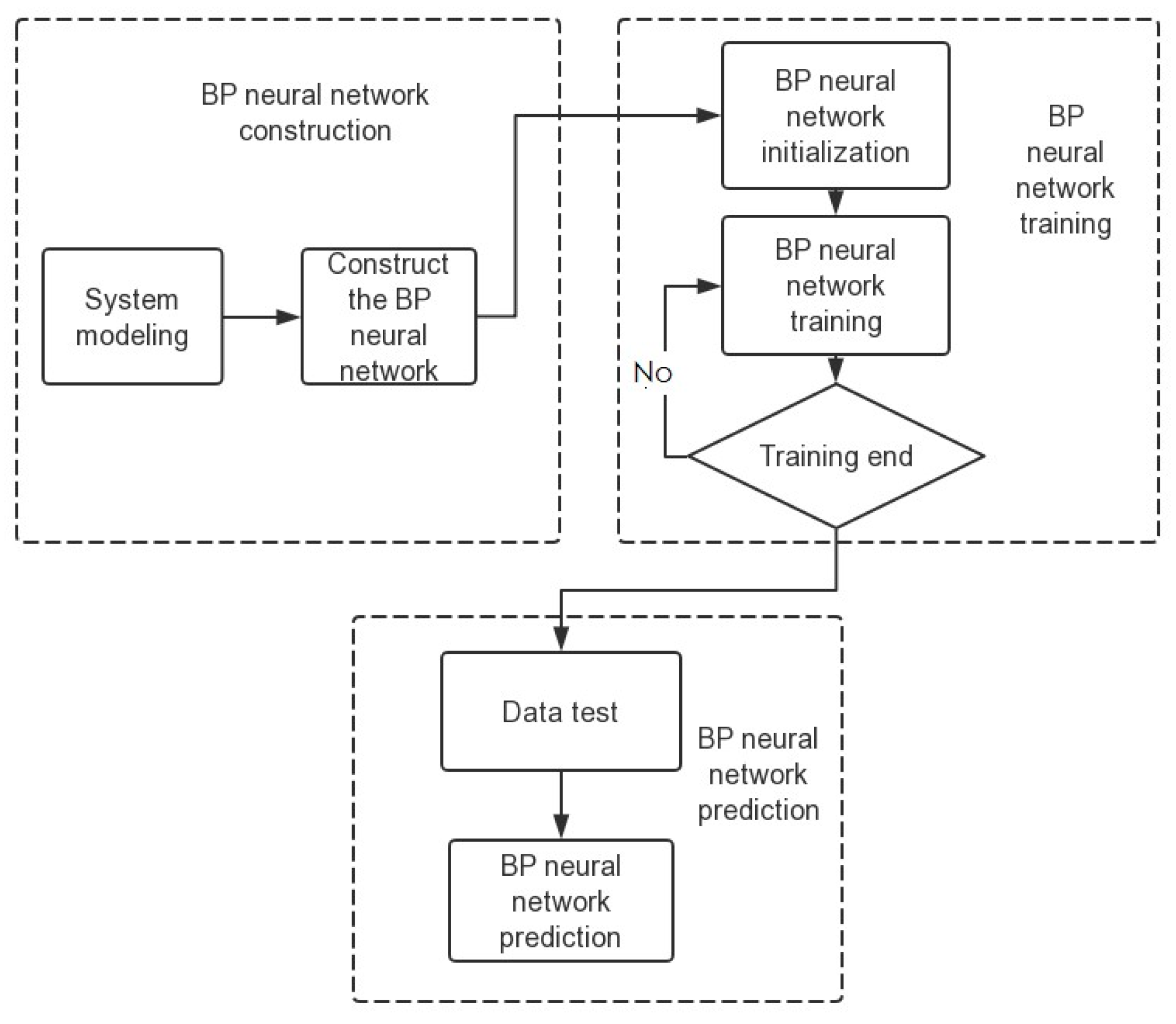
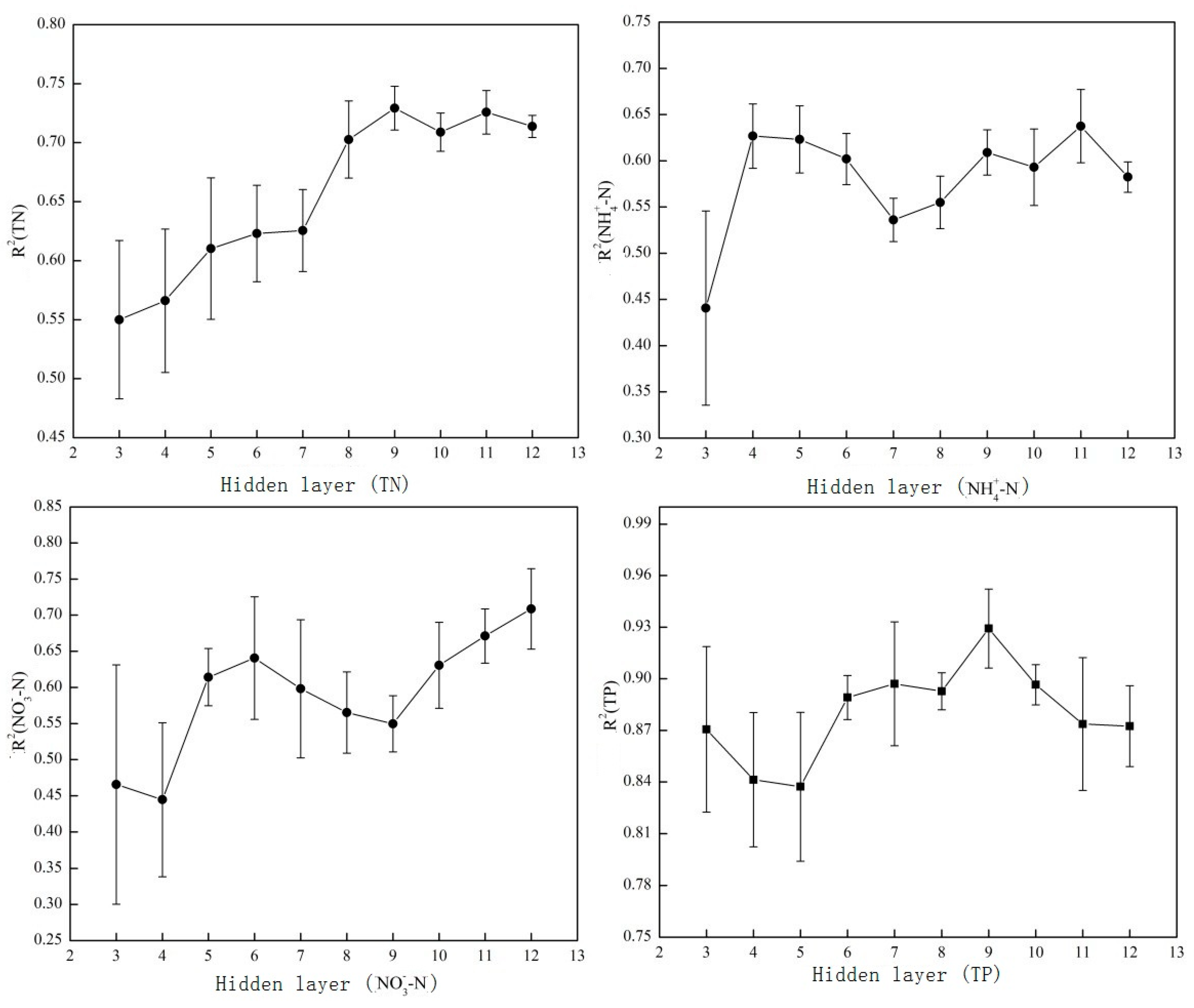
3.2. Building the BP Artificial Neural Network
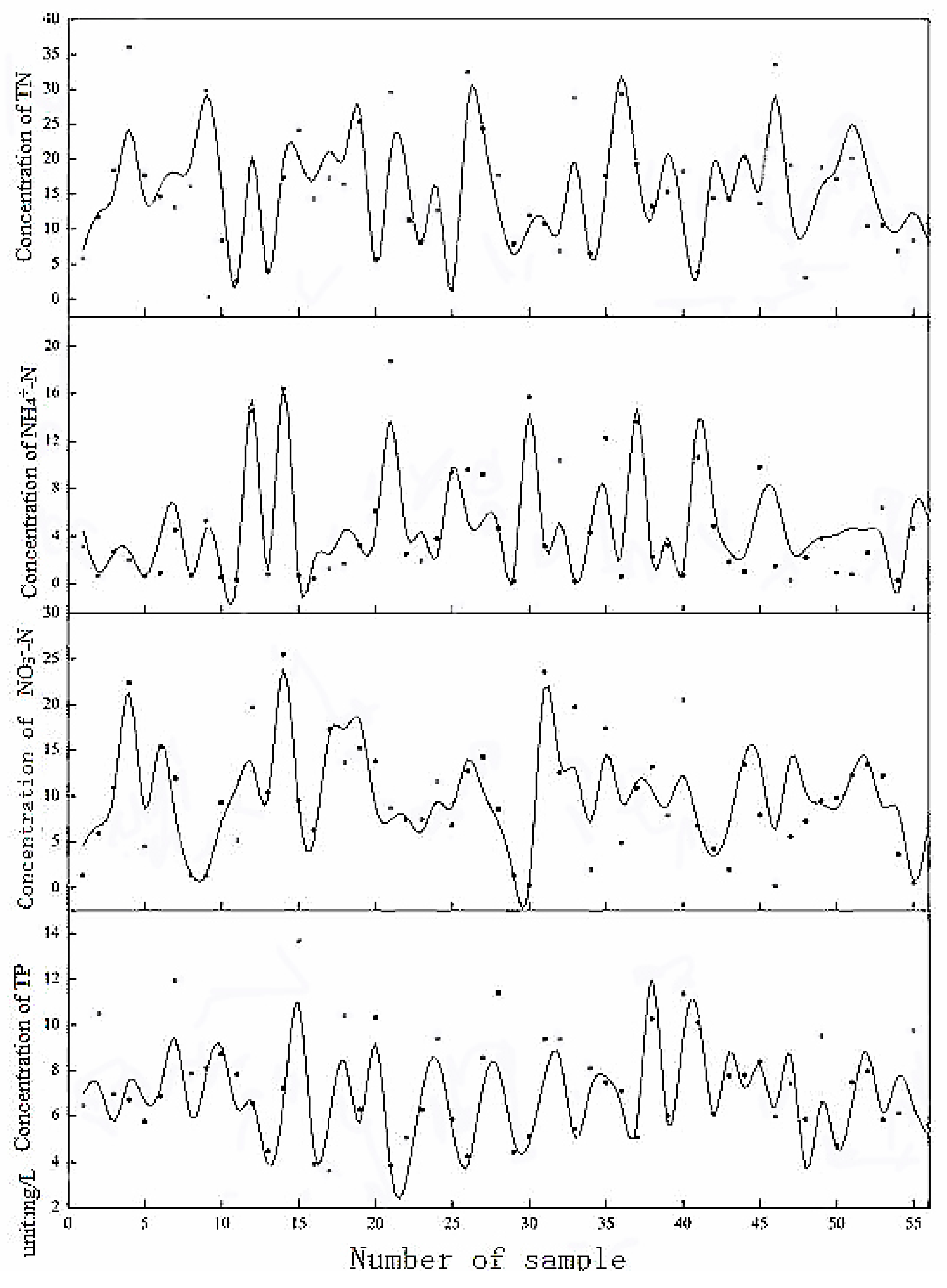
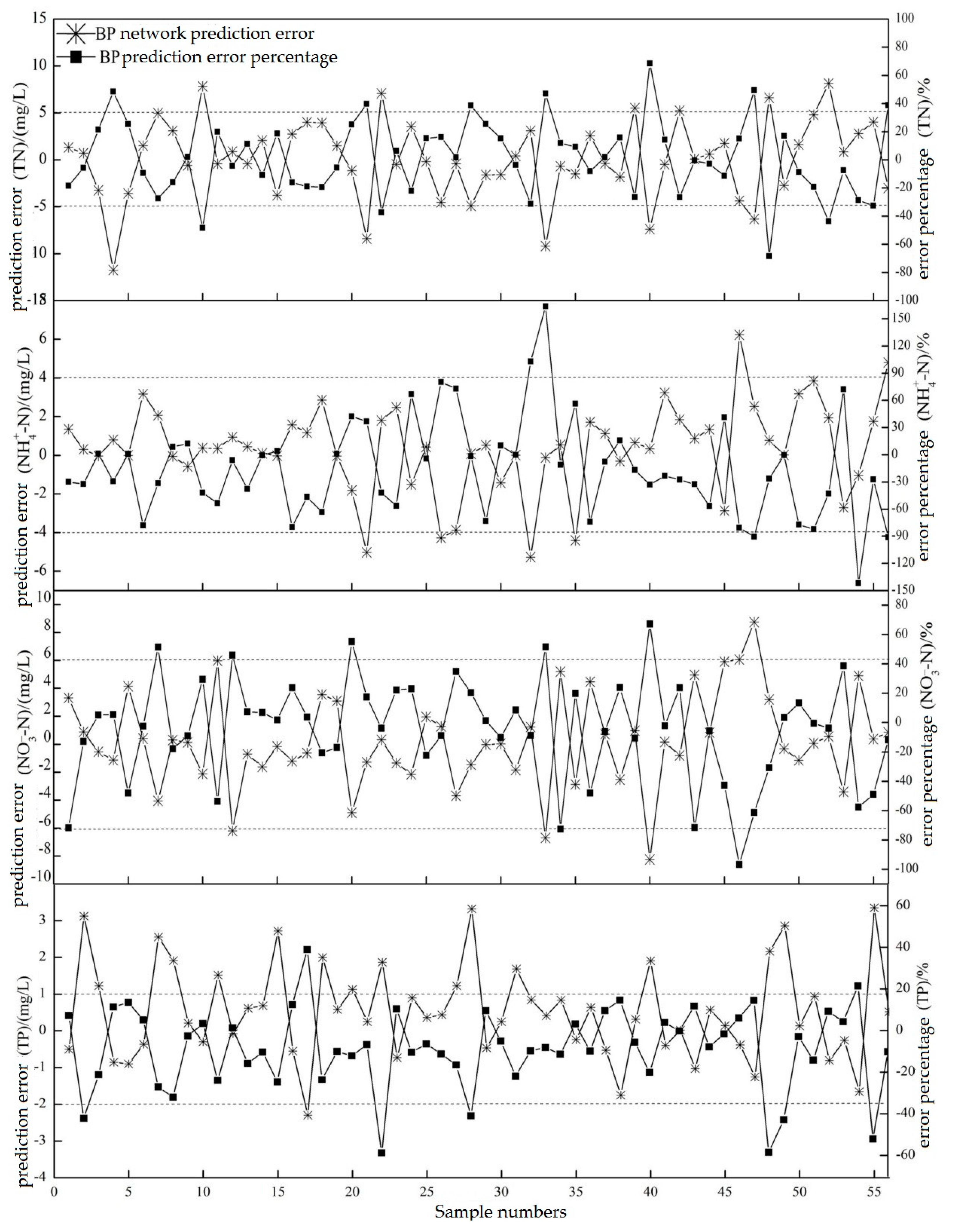
3.3. Comparison of the Predicted and Measured Values
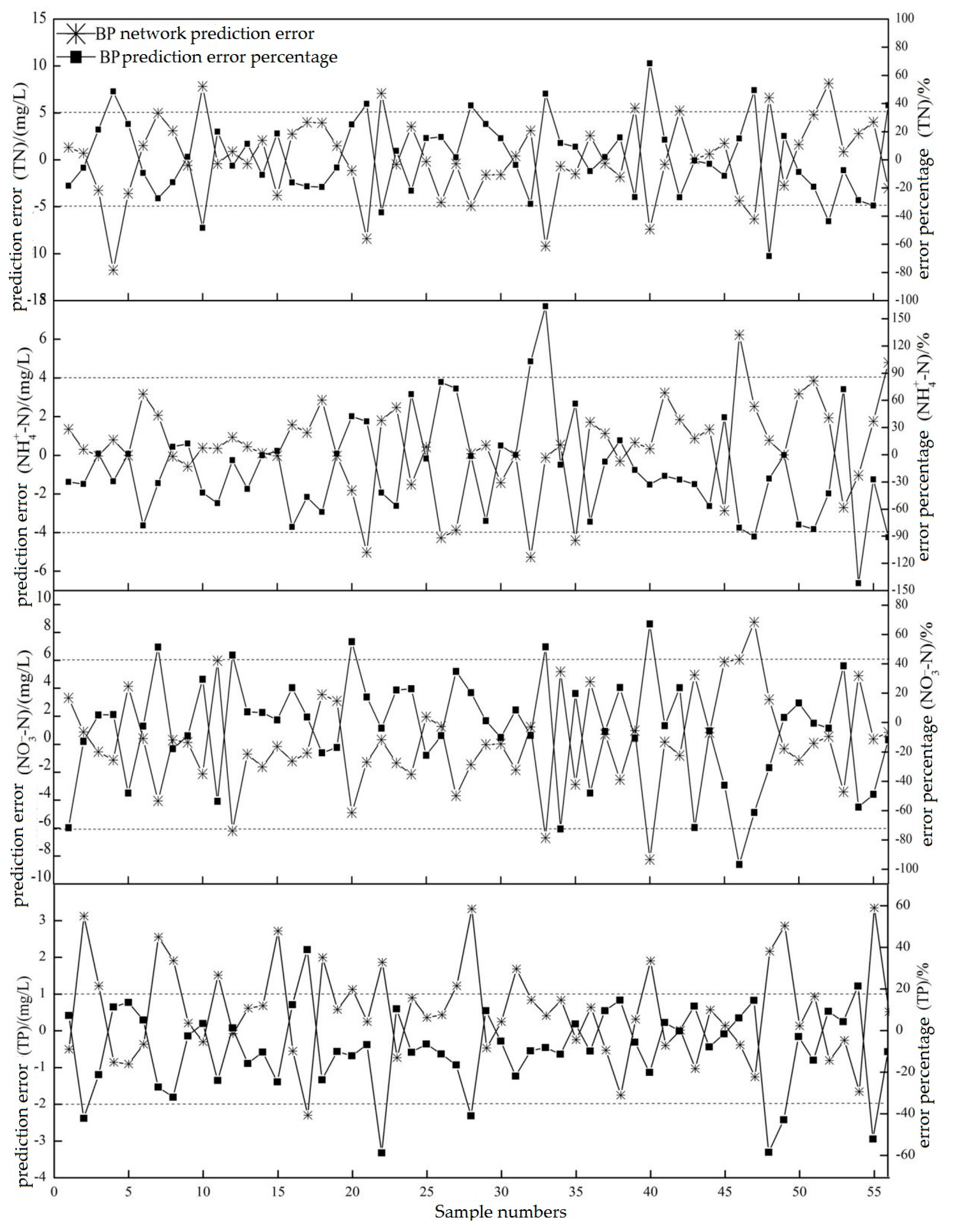
3.4. Training Errors in the BP Neural Network
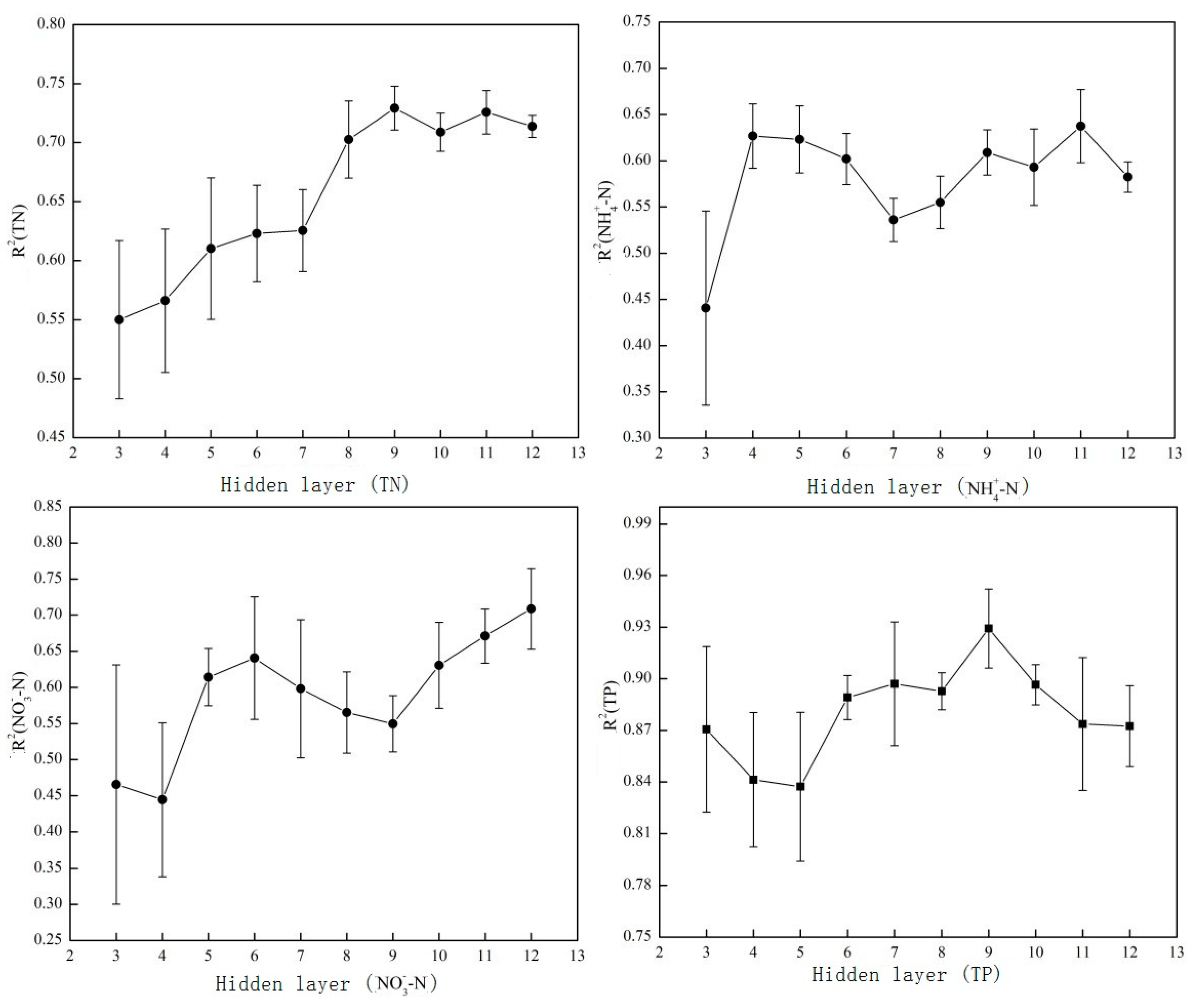
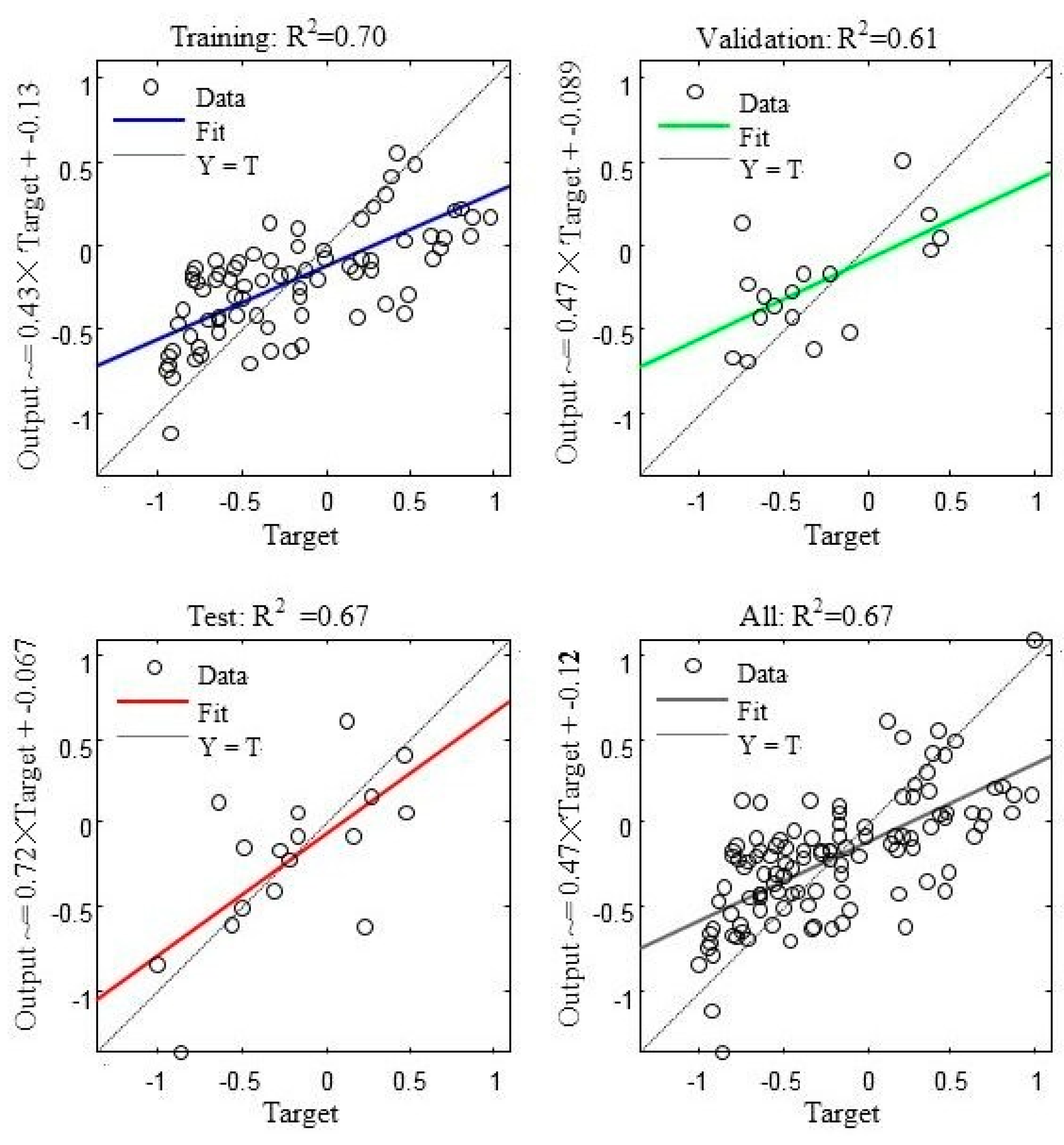
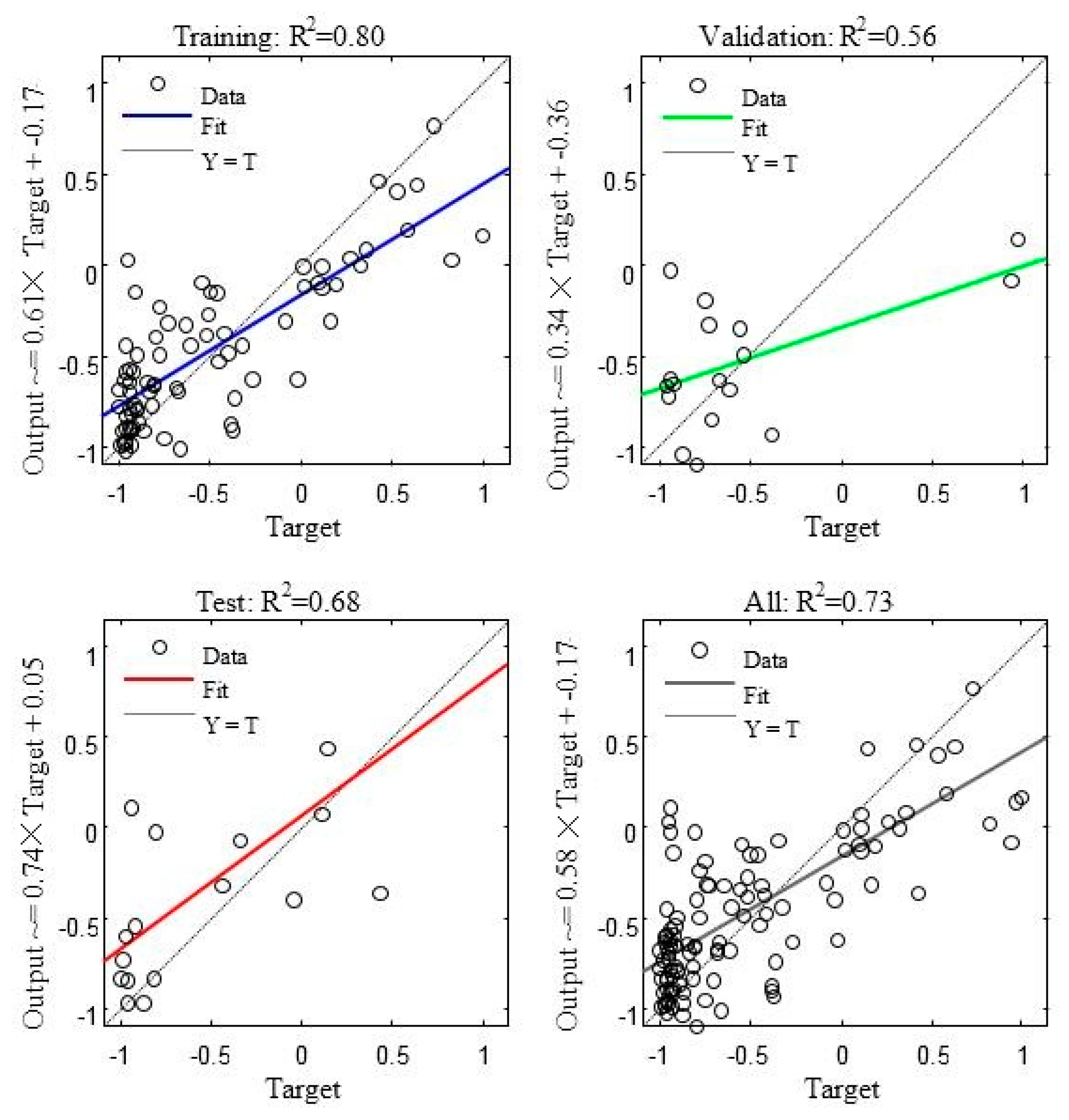
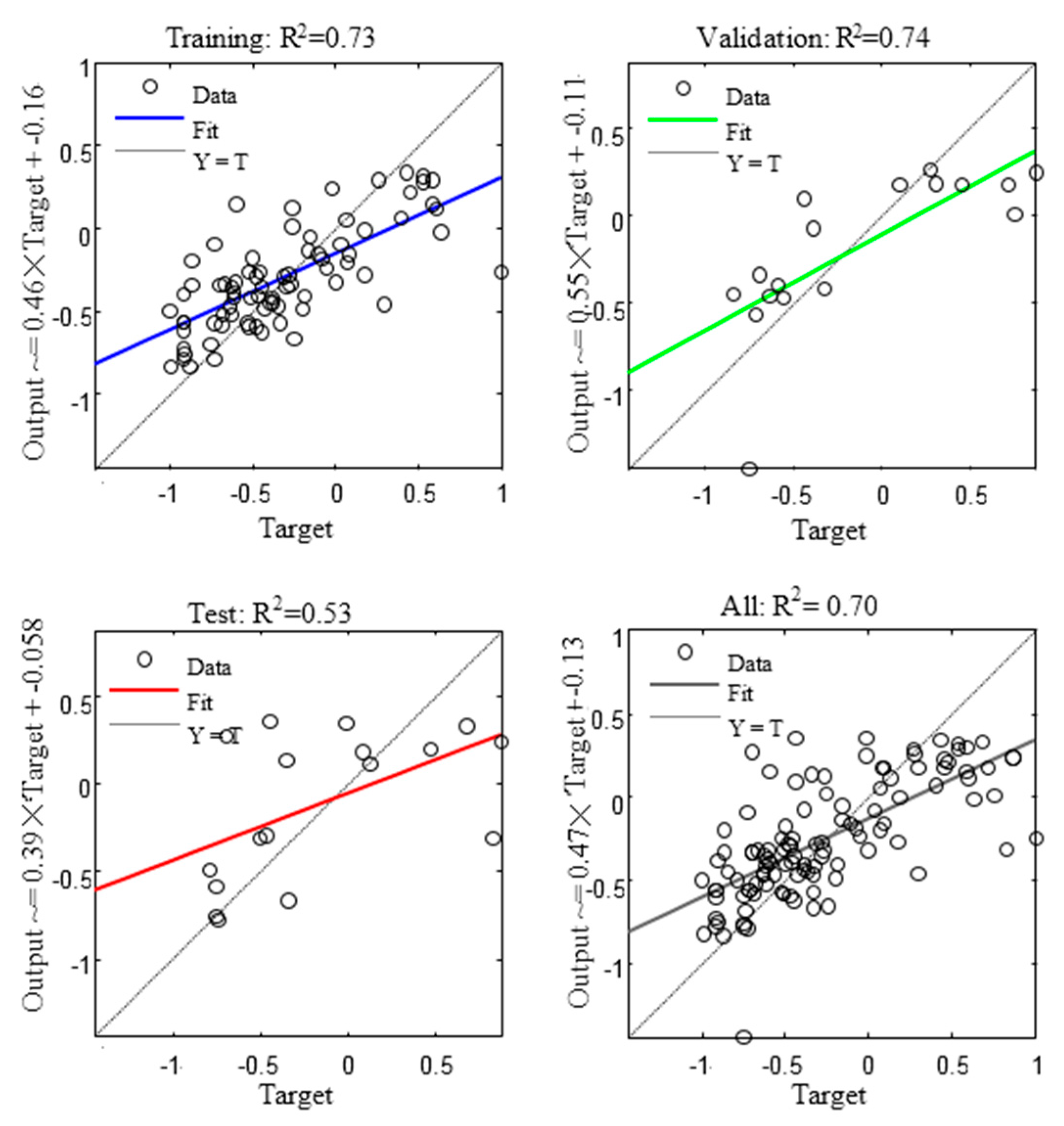
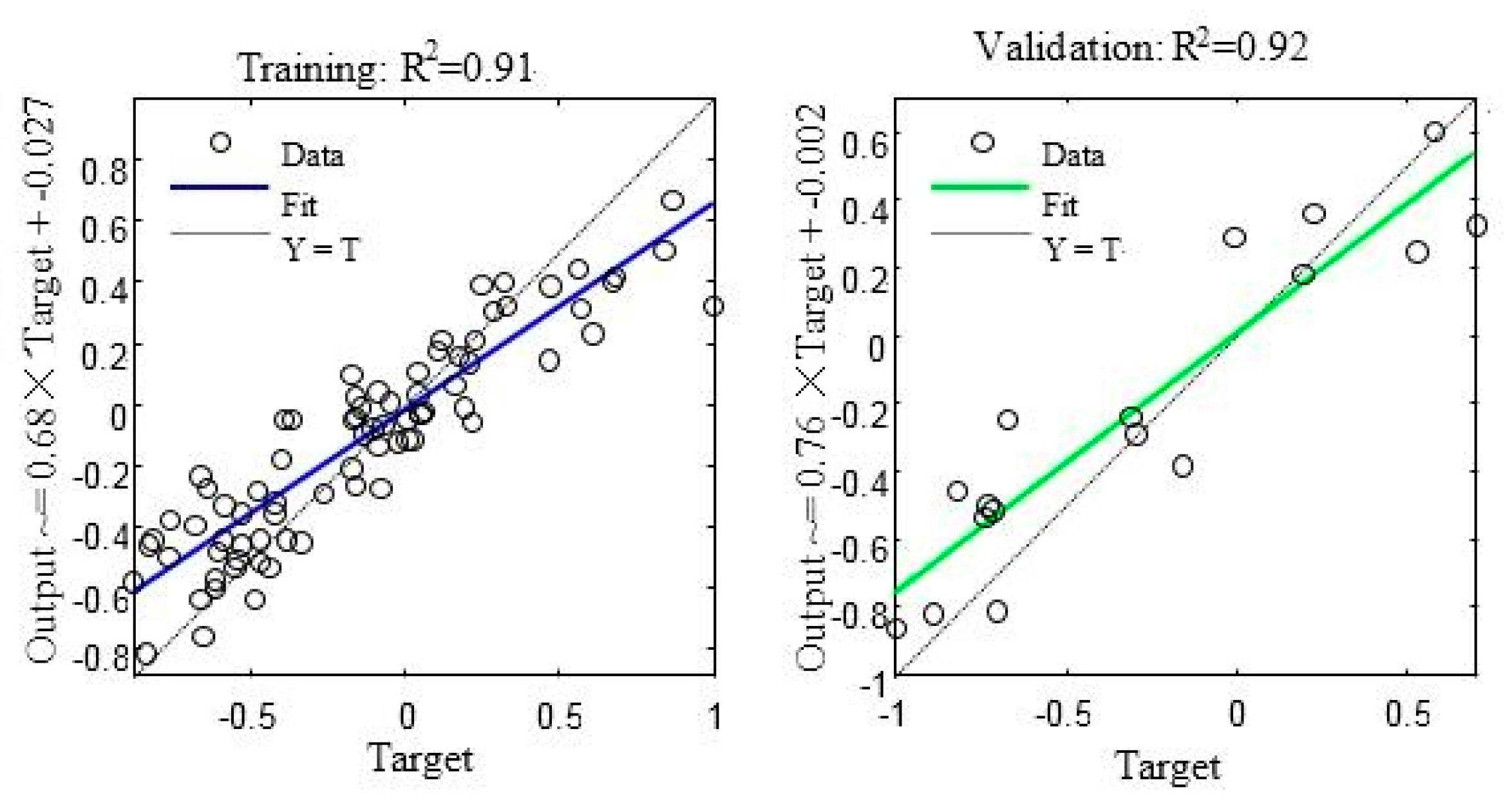
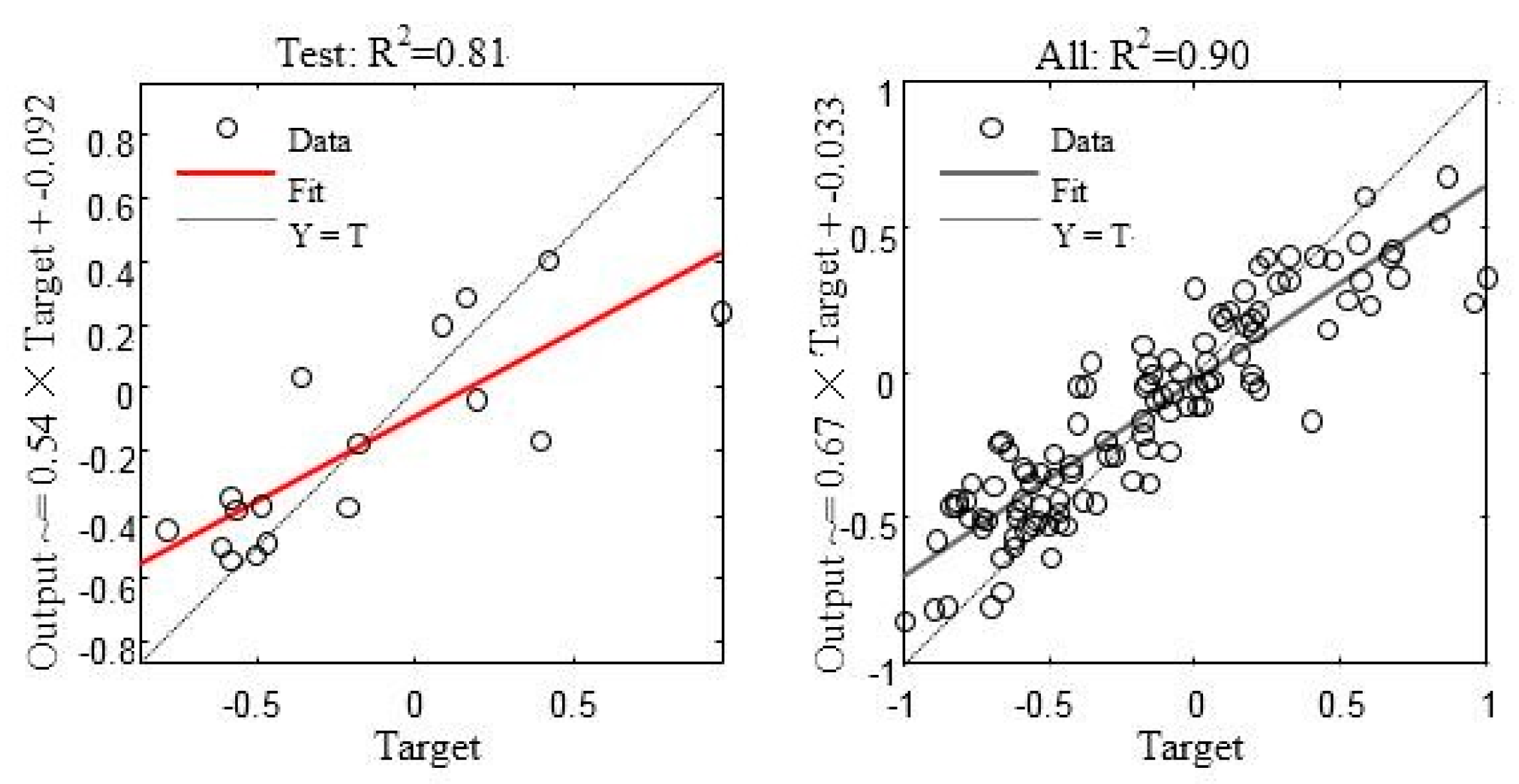
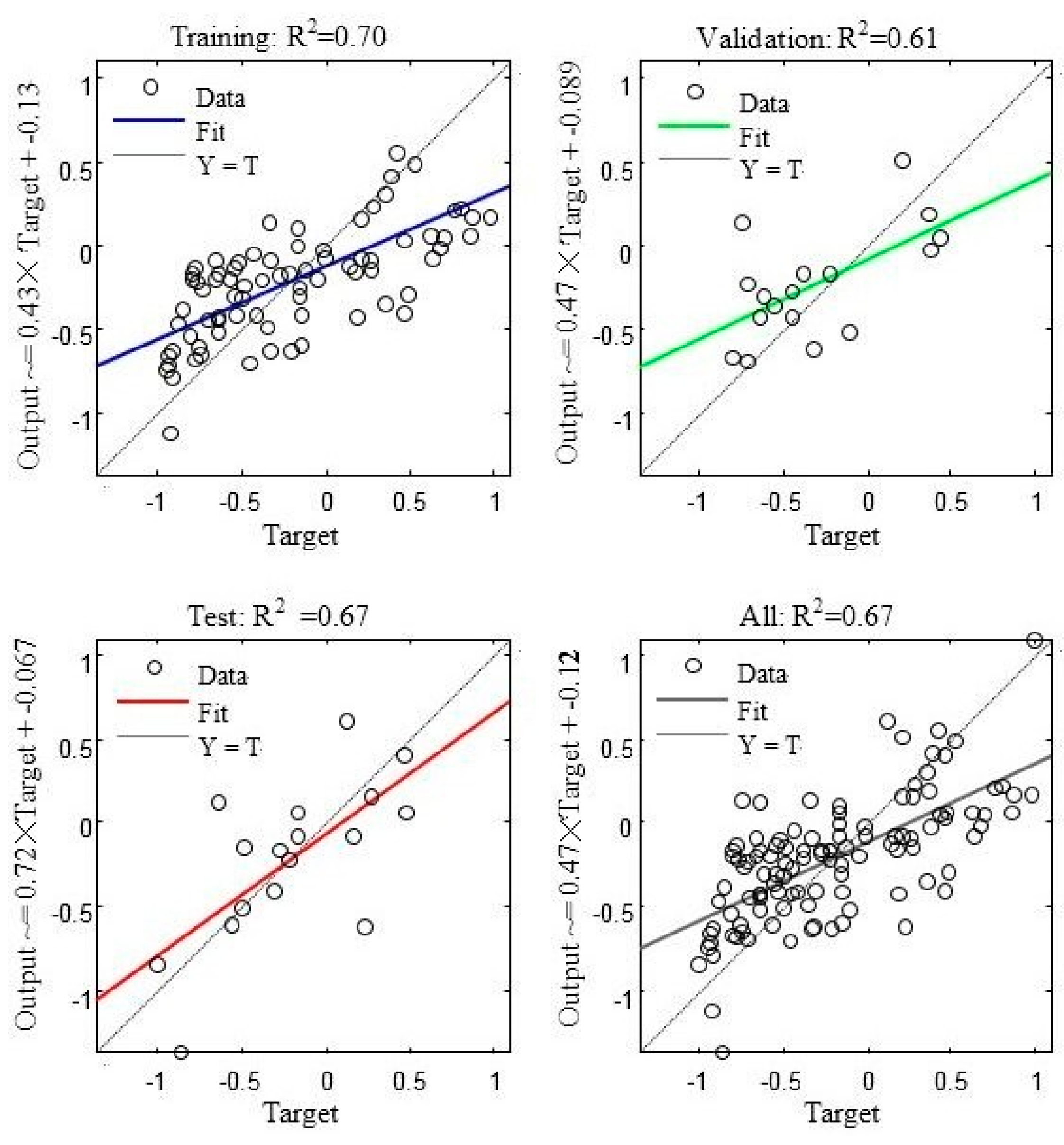
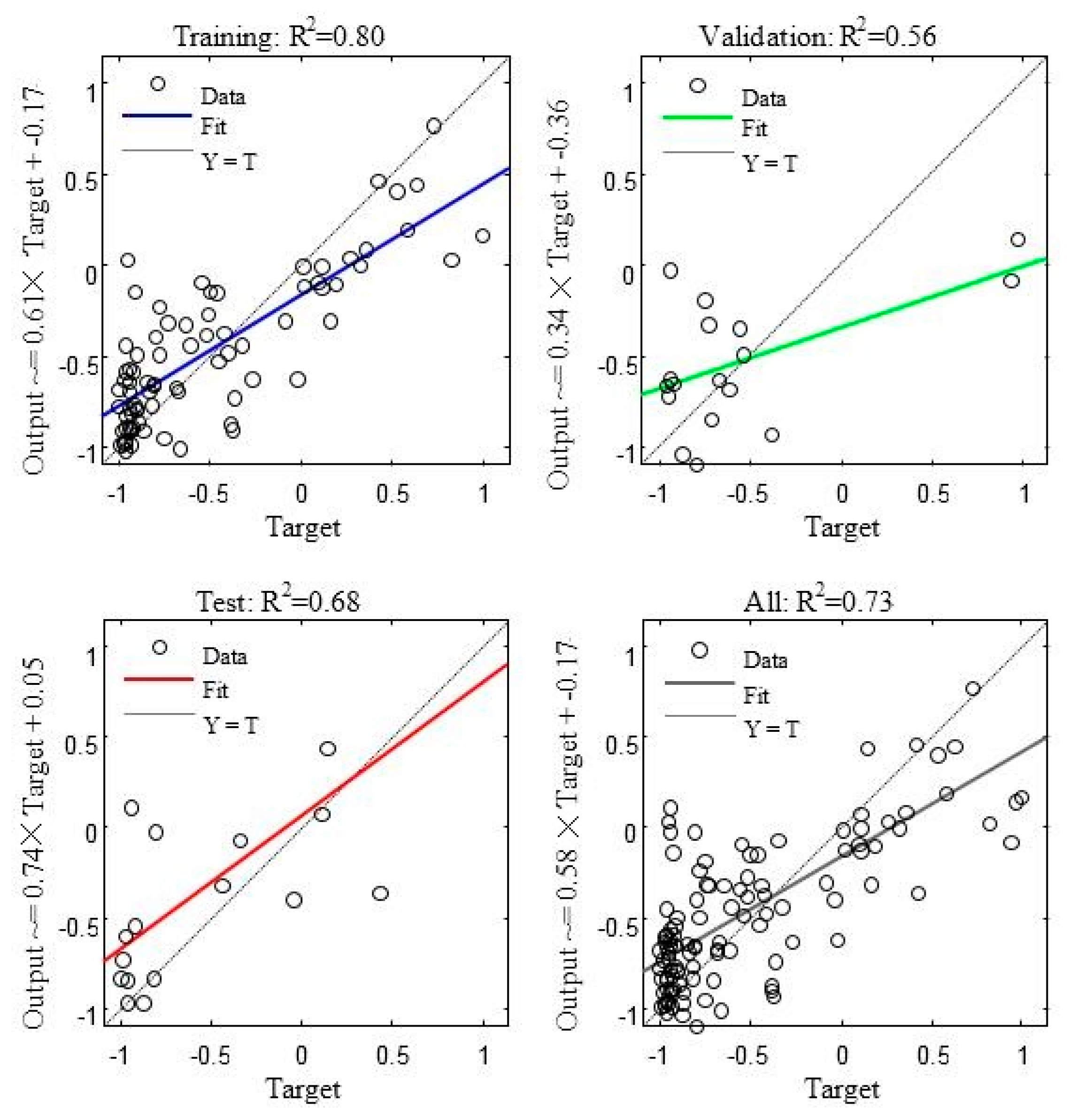
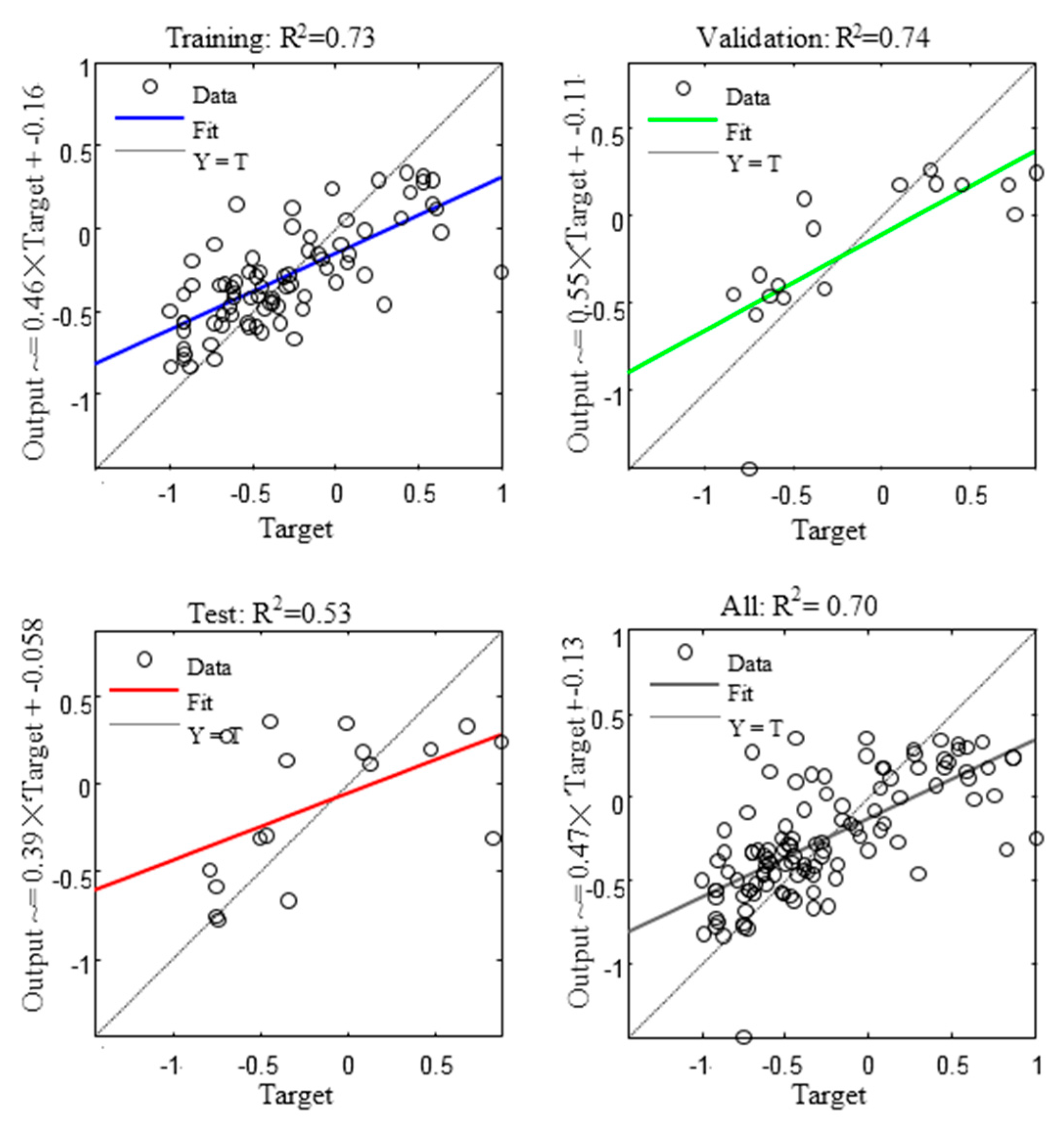
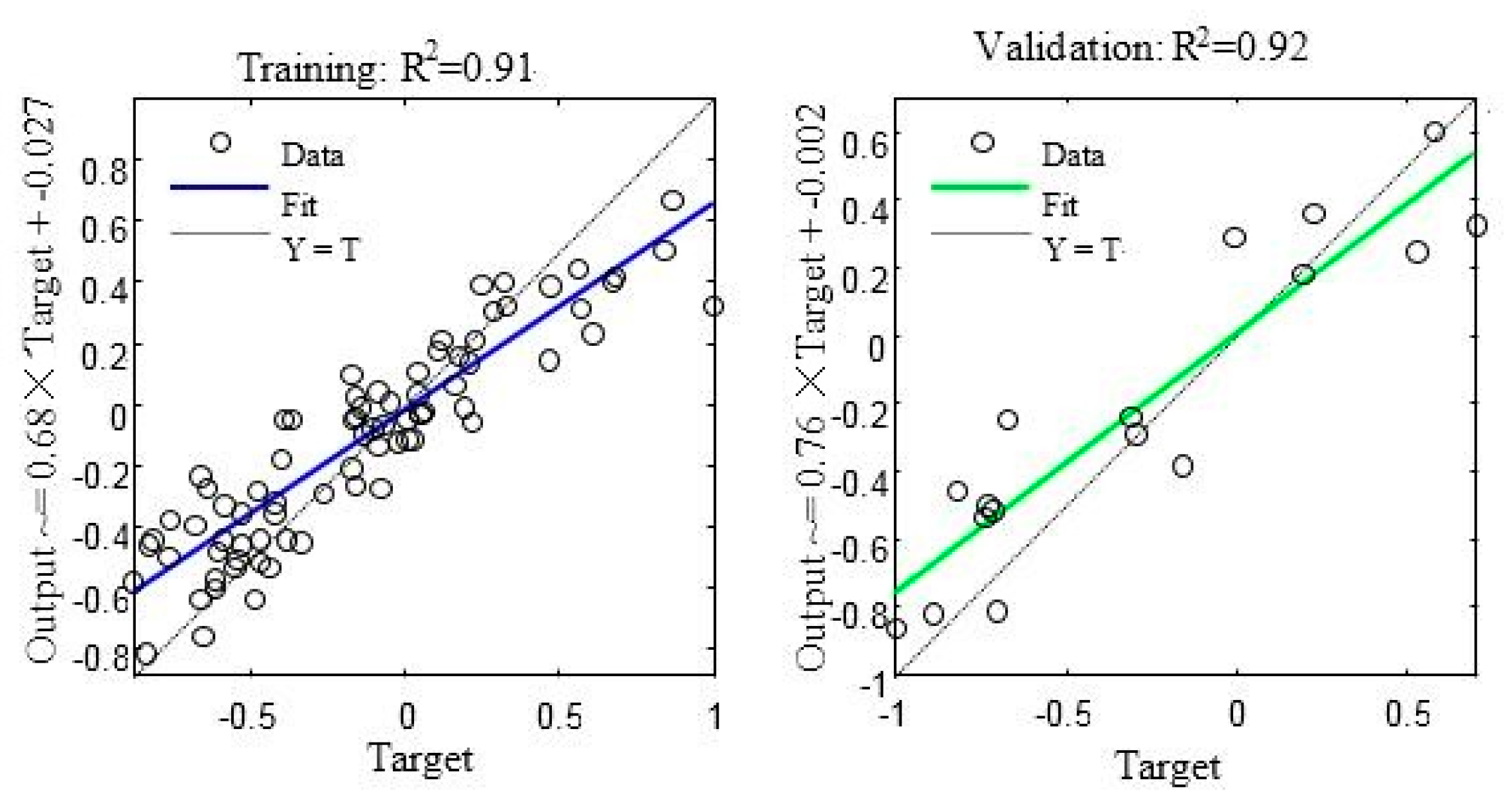
3.5. Network Fitting Ability
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Behrends, L.; Houke, L.; Bailey, E.; Jansen, P.; Brown, D. Reciprocating constructed wetlands for treating industrial, municipal and agricultural wastewater. Water Sci. Technol. 2001, 44, 399–405. [Google Scholar] [PubMed]
- Lee, C.; Fletcher, T.D.; Sun, G. Nitrogen removal in constructed wetland systems. Eng. Life Sci. 2009, 9, 11–22. [Google Scholar] [CrossRef]
- Cui, L.J.; Li, W.; Zhang, Y.Q.; Wei, J.M.; Lei, Y.R.; Zhang, M.Y.; Pan, X.; Zhao, X.S.; Li, K.; Ma, W. Nitrogen removal in a horizontal subsurface flow constructed wetland estimated using the first-order kinetic model. Water 2016, 8, 514. [Google Scholar] [CrossRef]
- Mitsch, W.J.; Cronk, J.K. Creation and restoration of wetlands: Some design consideration for ecological engineering. Soil Res. 1992, 17, 217–259. [Google Scholar]
- Wu, S.; Kuschk, P.; Brix, H.; Vymazal, J.; Dong, R. Development of constructed wetlands in performance intensifications for wastewater treatment: A nitrogen and organic matter targeted review. Water Res. 2014, 57, 40–55. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Q.H.; Wang, Y.F.; Wu, Z.B. Progress on study of microorganism in constructed wetlands. Environ. Sci. Technol. 2008, 31, 58–62. [Google Scholar]
- Sun, G.; Zhao, Y.; Allen, S. Enhanced removal of organic matter and ammoniacal-nitrogen in a column experiment of tidal flow constructed wetland system. J. Biotechnol. 2005, 115, 189–197. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Sun, G.; Allen, S. Purification capacity of a highly loaded laboratory scale tidal flow reed bed system with effluent recirculation. Sci. Total Environ. 2004, 330, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Sun, G.; Lafferty, C.; Allen, S.J. Optimising the performance of a lab-scale tidal flow reed bed system treating agricultural wastewater. Water Sci. Technol. 2004, 50, 65–72. [Google Scholar] [PubMed]
- Huang, J.; Reneau, R.B.; Hagedorn, C. Nitrogen removal in constructed wetlands employed to treat domestic wastewater. Water Res. 2000, 34, 2582–2588. [Google Scholar] [CrossRef]
- Jing, S.R.; Lin, Y.F. Seasonal effect on ammonia nitrogen removal by constructed wetlands treating polluted river water in southern Taiwan. Environ. Pollut. 2004, 127, 291–301. [Google Scholar] [CrossRef]
- Guo, Y.M.; Liu, Y.G.; Zeng, G.M.; Hu, X.J.; Xu, W.H.; Liu, Y.Q. An integrated treatment of domestic wastewater using sequencing batch biofilm reactor combined with vertical flow constructed wetland and its artificial neural network simulation study. Ecol. Eng. 2014, 64, 18–26. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, N.; Wu, L.; Wang, Y. Wind speed forecasting based on the hybrid ensemble empirical mode decomposition and GA-BP neural network method. Renew. Energy 2016, 94, 629–636. [Google Scholar] [CrossRef]
- Shao, L.M.; Fu, G.; Chao, X.C.; Zhou, J. Application of BP neural network to forecasting typhoon tracks. J. Nat. Disasters 2009, 18, 104–111. [Google Scholar]
- Wang, W.; Zhuang, K.; Wu, G.; Zhou, P.; Yang, M.; Li, D.; Jiang, C.; Huang, B. The application of BP neural networks to the new generation expert system for earthquake prediction. Earthquake 1997, 11, 1259–1265. [Google Scholar]
- Zhou, Y.; Ruan, R. Application of LM-BP neural networks in remote sensing image classification. Remote Sens. Inf. 2010, 32, 80–86. [Google Scholar]
- Li, D.; Wu, G.; Zhao, J.; Niu, W.; Liu, Q. Wireless channel identification algorithm based on feature extraction and BP neural network. J. Inf. Process Syst. 2017, 13, 141–151. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, L. Stock market prediction of S&P 500 via combination of improved BCO approach and BP neural network. Expert Syst. Appl. 2009, 36, 8849–8854. [Google Scholar]
- Liu., J.; Jiang, Z.; Wei, J.; Ling, Q. Application of BP neural network model in groundwater quality evaluation. Syst. Eng. Theory Pract. 2000, 20, 124–127. [Google Scholar]
- Mo, M.; Wang, X.; Wu, H.; Cai, S.; Zhang, X.; Wang, H. Ecosystem health assessment of Honghu Lake Wetland of China using artificial neural network approach. Chin. Geogr. Sci. 2009, 19, 349–356. [Google Scholar] [CrossRef]
- Liang, X.; Chao, F.; Wu, Z.; He, L.; Lu, Y. The application of Neural Network BP to Healthy Assessment of Wetland Ecosystem in Dongting Lake. For. Invent. Plan. 2009, 5, 12. [Google Scholar]
- Li, L.; Zhang, H. Assessment model of townlet eco-environmental quality based on BP-artificial neural network. Chin. J. Appl. Ecol. 2008, 19, 2693–2698. [Google Scholar]
- Li, R.; Chen, Z.; Chen, Z.; Zhang, X.; Zheng, L.; Wang, Q. Calculation of ecological recovery based on BP neural network: A case study of Zhuxi Small Watershed in Changting County, Fujian Province. Acta Ecol. Sin. 2015, 35, 1973–1981. [Google Scholar]
- He, Y.; He, H.; Meng, C.; Xie, M.; Long, M.; Li, Y. Predicting occurrence degree of rice planthoppers in Guangxi Province based on BP artificial neural network method. Chin. J. Ecol. 2014, 33, 159–168. [Google Scholar]
- Csala, A.; Voorbraak, F.P.; Zwinderman, A.H.; Hof, M.H. Sparse Redundancy Analysis of High Dimensional Genetic and Genomic Data. Bioinformatics 2017, 33, 3228–3234. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.S.; Zhao, Y.Q.; Zhao, X.H.; Kumar, J.L.G. Comprehensive analysis of step-feeding strategy to enhance biological nitrogen removal in alum sludge-based tidal flow constructed wetlands. Bioresour. Technol. 2012, 111, 27–35. [Google Scholar] [CrossRef] [PubMed]
- Saeed, T.; Sun, G. A review on nitrogen and organics removal mechanisms in subsurface flow constructed wetlands: Dependency on environmental parameters, operating conditions and supporting media. J. Environ. Manag. 2012, 112, 429–448. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Zhang, D.; Austin, D.; Dong, R.; Pang, C. Evaluation of a lab-scale tidal flow constructed wetland performance: Oxygen transfer capacity, organic matter and ammonium removal. Ecol. Eng. 2011, 37, 1789–1795. [Google Scholar] [CrossRef]
- Zhi, W.; Ji, G. Quantitative response relationships between nitrogen transformation rates and nitrogen functional genes in a tidal flow constructed wetland under C/N ratio constraints. Water Res. 2014, 64, 32–41. [Google Scholar] [CrossRef] [PubMed]
- Vohla, C.; Kõiv, M.; Bavor, H.J.; Chazarenc, F.; Ülo, M. Filter materials for phosphorus removal from wastewater in treatment wetlands—A review. Ecol. Eng. 2011, 37, 70–89. [Google Scholar] [CrossRef]
- Li, W.; Zhang, Y.; Cui, L.J.; Zhang, M.Y.; Wang, Y.F. Modeling total phosphorus removal in an aquatic-environment restoring horizontal subsurface flow constructed wetland based on artificial neural networks. Environ. Sci. Pollut. Res. 2015, 22, 12347–12354. [Google Scholar] [CrossRef] [PubMed]
- Shen, H.; Wang, Z.X. Determining the number of BP neural network hidden layer units. J. Tianjin Univ. Tech. 2008, 24, 13–17. [Google Scholar]
- Zhang, J. Study on Coefficient of Correlation as Goodness-of-fit Criterion. J. Zhengzhou Univ. Technol. Nat. Sci. Ed. 2001, 22, 72–74. [Google Scholar]
- Kizito, S.; Lv, T.; Wu, S.; Ajmal, Z.; Luo, H.; Dong, R. Treatment of anaerobic digested effluent in biochar-packed vertical flow constructed wetland columns: Role of media and tidal operation. Sci. Total Environ. 2017, 592, 197–205. [Google Scholar] [CrossRef] [PubMed]
- Ilyas, H.; Masih, I. The performance of the intensified constructed wetlands for organic matter and nitrogen removal: A review. J. Environ. Manag. 2017, 198, 372–383. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | ρ/(mg/L) | pH | ||||
|---|---|---|---|---|---|---|
| TN | NH4+-N | NO3−-N | TOC | TP | ||
| Range | 30~50 | 30~50 | 0~5 | 0~20 | 10~16 | 7~9 |
| Number | Inflow Mode | Idle Time (h) | Reaction Time (h) | Idle/Reaction Time |
|---|---|---|---|---|
| A | Continue flow | — | — | — |
| B | Tidal flow | 12 | 12 | 1:1 |
| C | Tidal flow | 8 | 16 | 1:2 |
| D | Tidal flow | 16 | 8 | 2:1 |
| Inflow Mode | TN Removal Rate(%) | NH4+-N Removal Rate (%) | TP Removal Rate (%) |
|---|---|---|---|
| A | 82 ± 5 a | 95 ± 3 a | 55 ± 14 a |
| B | 85 ± 5 b | 98 ± 1 b | 57 ± 16 a |
| C | 86 ± 4 b | 99 ± 1 b | 56 ± 19 a |
| D | 90 ± 3 c | 99 ± 1 c | 58 ± 13 a |
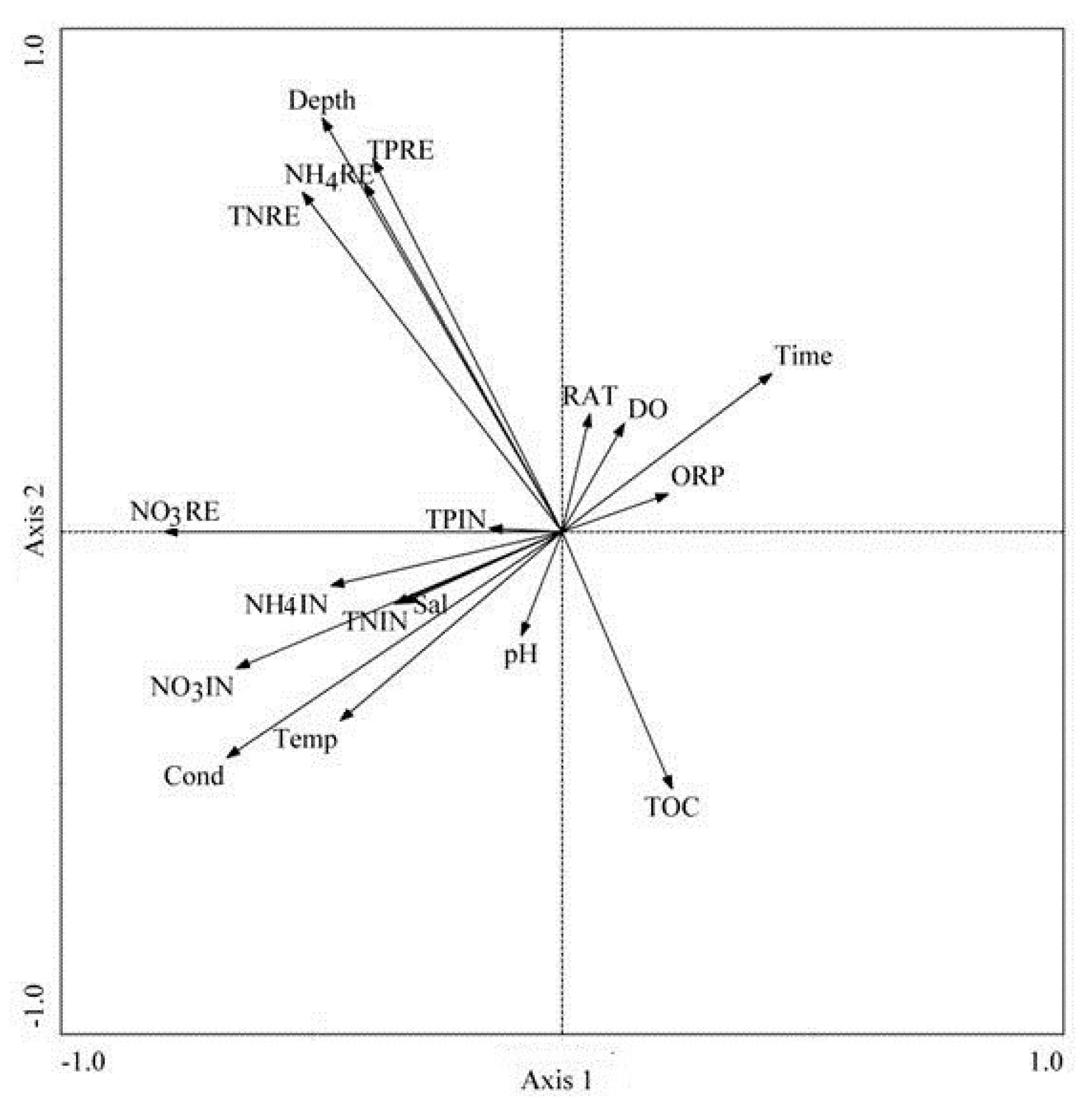
| Index | NO3RE | NH4RE | TNRE | TPRE | NO3IN | NH4IN | TNIN | TPIN | TOC | RAT | DO | Temp | Cond | Sal | pH | ORP | Time | Depth |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| NO3RE | ||||||||||||||||||
| NH4RE | 0.18 | |||||||||||||||||
| TNRE | −0.03 | 0.06 | ||||||||||||||||
| TPRE | −0.29 | −0.17 | −0.02 | |||||||||||||||
| NO3IN | 0.52 | −0.24 | −0.36 | 0.11 | ||||||||||||||
| NH4IN | −0.37 | −0.10 | −0.25 | 0.05 | 0.75 | |||||||||||||
| TNIN | −0.27 | −0.13 | −0.12 | 0.04 | 0.63 | 0.87 | ||||||||||||
| TPIN | 0.12 | 0.01 | −0.67 | 0.08 | 0.35 | 0.29 | 0.04 | |||||||||||
| TOC | 0.07 | −0.35 | −0.30 | 0.03 | −0.17 | −0.28 | 0.24 | 0.32 | ||||||||||
| RAT | 0.04 | 0.2 | 0.12 | 0.19 | 0.00 | 0.00 | 0.00 | 0.00 | 0.16 | |||||||||
| DO | 0.10 | 0.19 | 0.10 | 0.25 | 0.01 | −0.02 | 0.02 | 0.01 | 0.10 | 0.92 | ||||||||
| Temp | 0.25 | −0.33 | −0.18 | 0.15 | 0.65 | 0.74 | 0.47 | 0.47 | 0.18 | 0.05 | 0.04 | |||||||
| Cond | 0.33 | −0.30 | −0.27 | 0.10 | 0.75 | 0.61 | 0.39 | 0.47 | 0.13 | 0.16 | 0.16 | 0.76 | ||||||
| Sal | 0.35 | −0.13 | −0.12 | 0.01 | 0.17 | 0.03 | 0.11 | 0.32 | 0.06 | 0.11 | 0.13 | 0.20 | 0.52 | |||||
| pH | 0.46 | −0.18 | −0.26 | 0.12 | −0.45 | −0.54 | 0.53 | 0.35 | 0.39 | 0.06 | 0.07 | 0.27 | 0.14 | 0.12 | ||||
| ORP | −0.37 | −0.47 | −0.42 | 0.07 | 0.07 | 0.01 | 0.05 | 0.07 | 0.07 | 0.18 | 0.22 | 0.12 | 0.21 | 0.15 | −0.15 | |||
| Time | −0.53 | 0.18 | −0.18 | 0.18 | −0.03 | 0.30 | 0.40 | 0.13 | 0.15 | 0.00 | 0.04 | 0.16 | 0.30 | 0.29 | −0.52 | 0.32 | ||
| Depth | −0.38 | 0.43 | 0.04 | 0.65 | 0.00 | 0.00 | 0.00 | 0.00 | 0.56 | 0.00 | 0.06 | 0.22 | 0.11 | 0.04 | −0.13 | −0.10 | 0.00 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Cui, L.; Zhang, Y.; Cai, Z.; Zhang, M.; Xu, W.; Zhao, X.; Lei, Y.; Pan, X.; Li, J.; et al. Using a Backpropagation Artificial Neural Network to Predict Nutrient Removal in Tidal Flow Constructed Wetlands. Water 2018, 10, 83. https://doi.org/10.3390/w10010083
Li W, Cui L, Zhang Y, Cai Z, Zhang M, Xu W, Zhao X, Lei Y, Pan X, Li J, et al. Using a Backpropagation Artificial Neural Network to Predict Nutrient Removal in Tidal Flow Constructed Wetlands. Water. 2018; 10(1):83. https://doi.org/10.3390/w10010083
Chicago/Turabian StyleLi, Wei, Lijuan Cui, Yaqiong Zhang, Zhangjie Cai, Manyin Zhang, Weigang Xu, Xinsheng Zhao, Yinru Lei, Xu Pan, Jing Li, and et al. 2018. "Using a Backpropagation Artificial Neural Network to Predict Nutrient Removal in Tidal Flow Constructed Wetlands" Water 10, no. 1: 83. https://doi.org/10.3390/w10010083