Evaluating Consistency between the Remotely Sensed Soil Moisture and the Hydrological Model-Simulated Soil Moisture in the Qujiang Catchment of China


Abstract
:1. Introduction
2. Study Area and Datasets
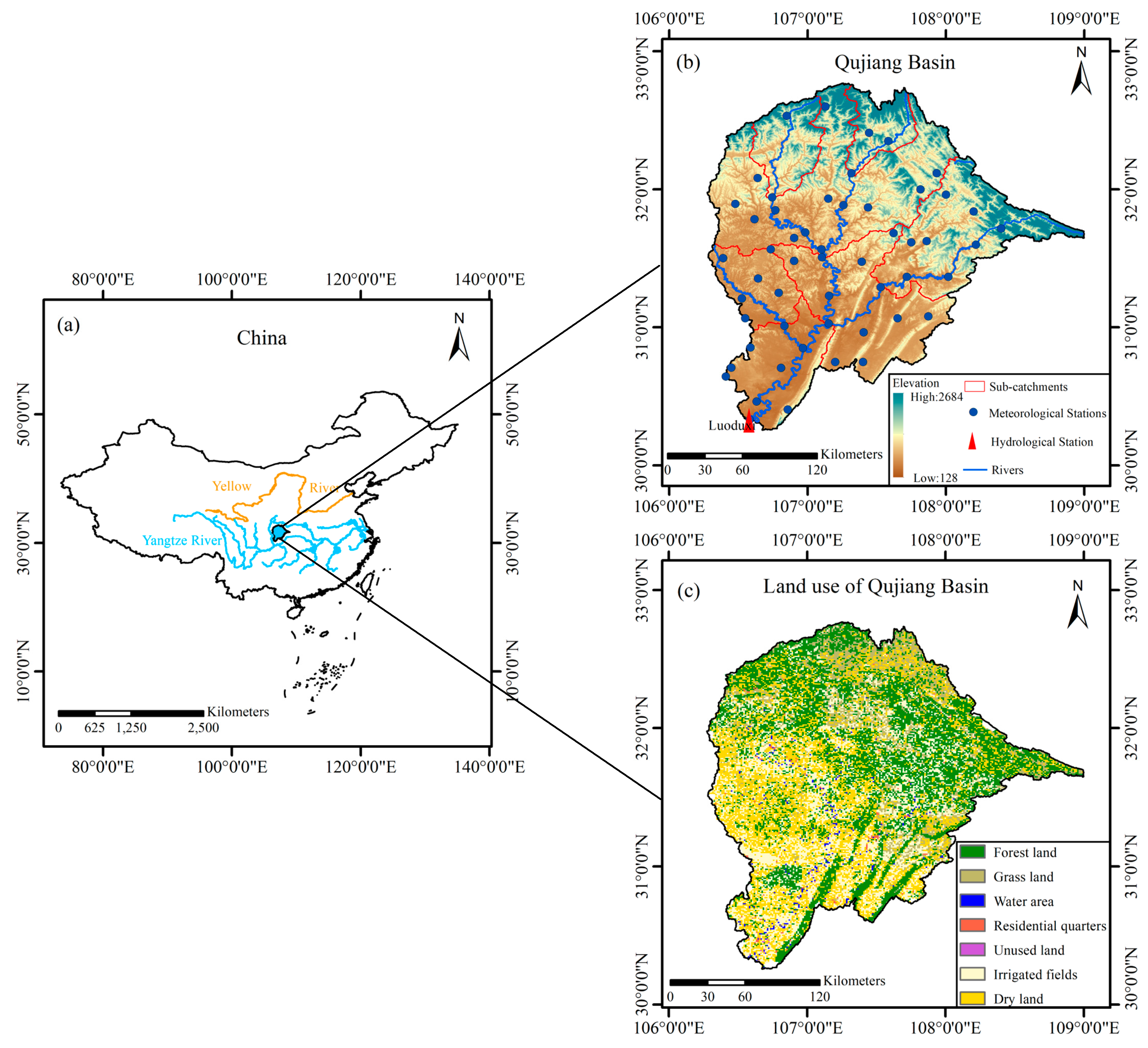
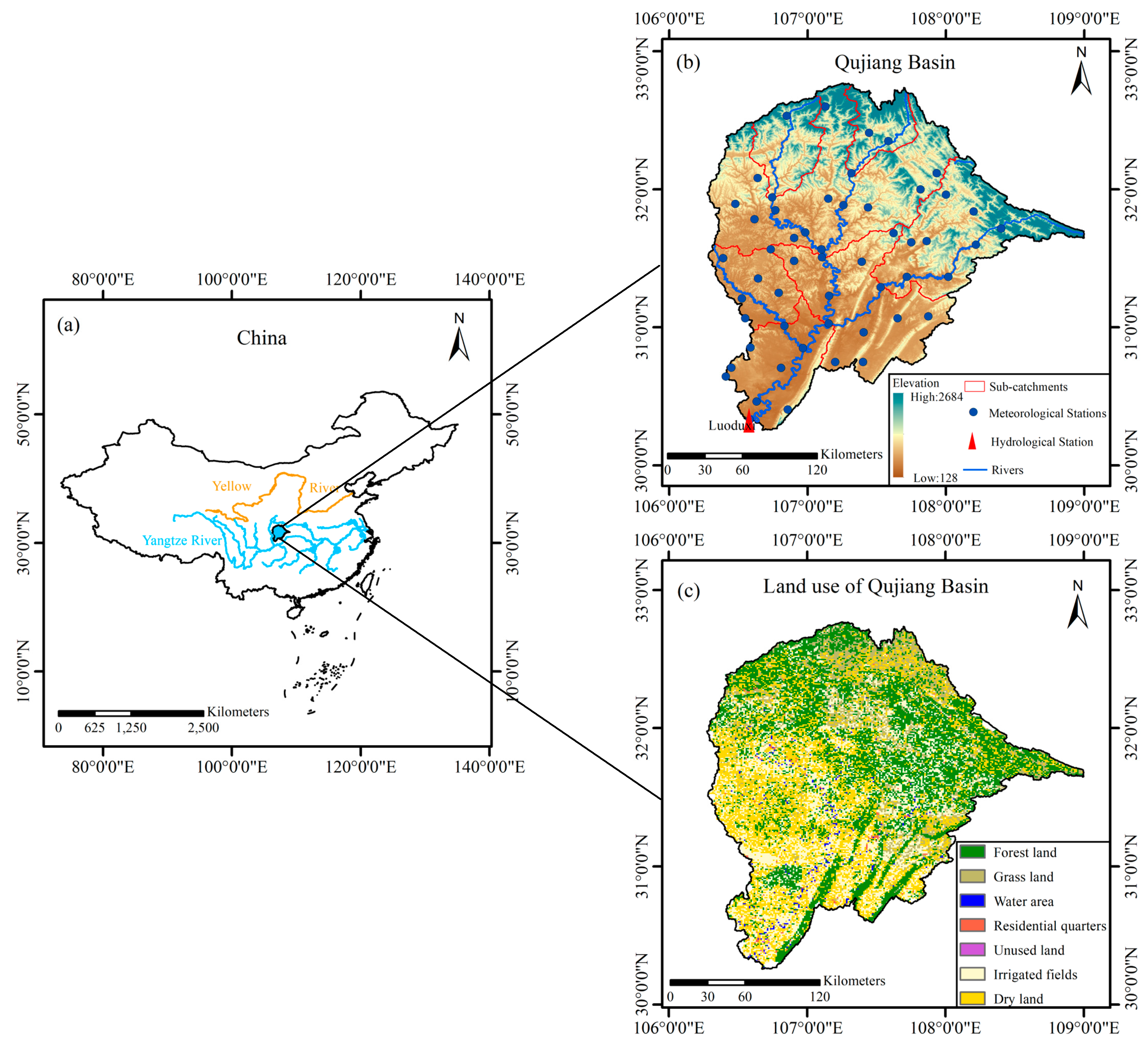
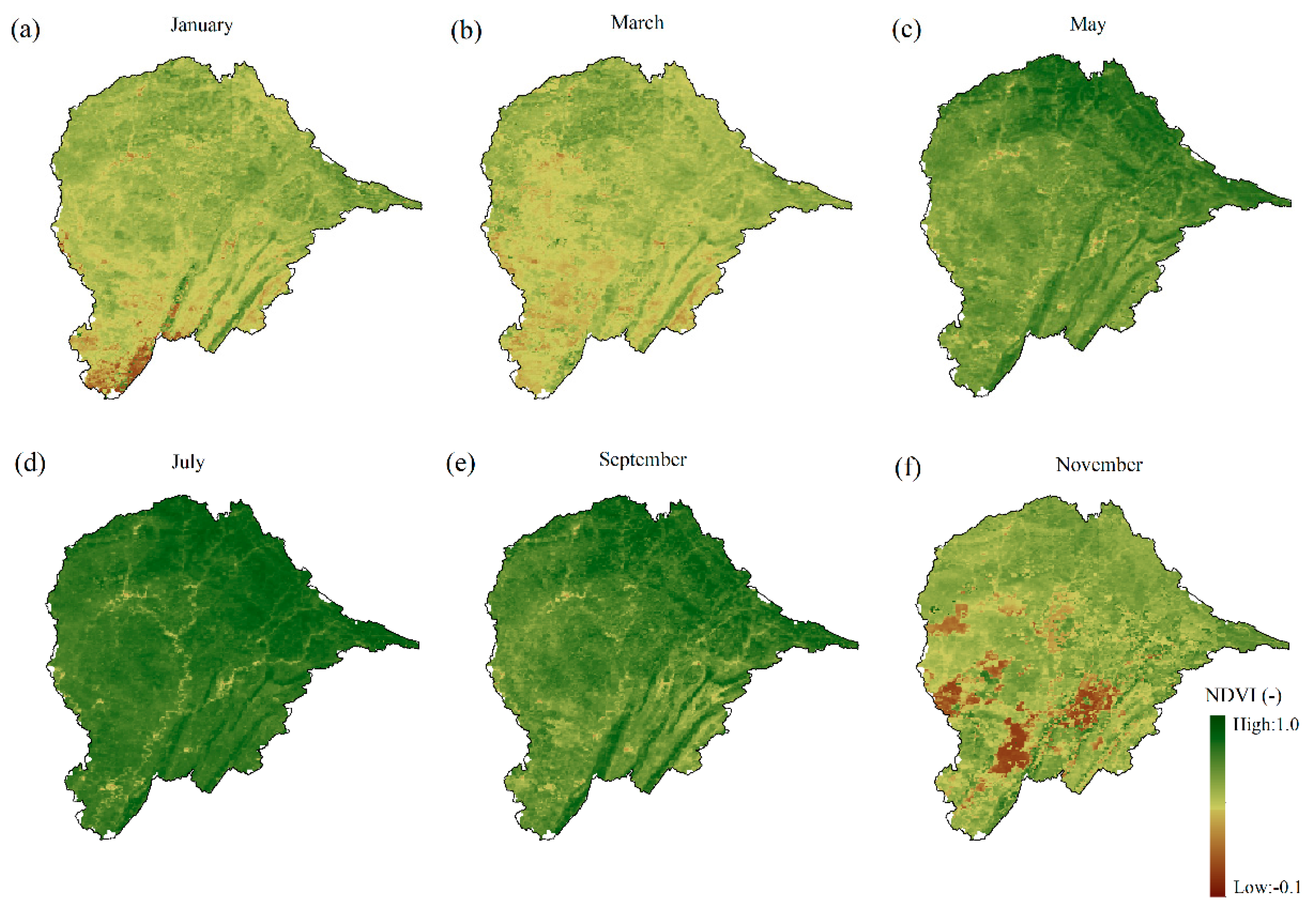
2.1. Study Area
2.2. Hydro-Meteorological Data
2.3. Remotely Sensed Soil Moisture Products
3. Methodology
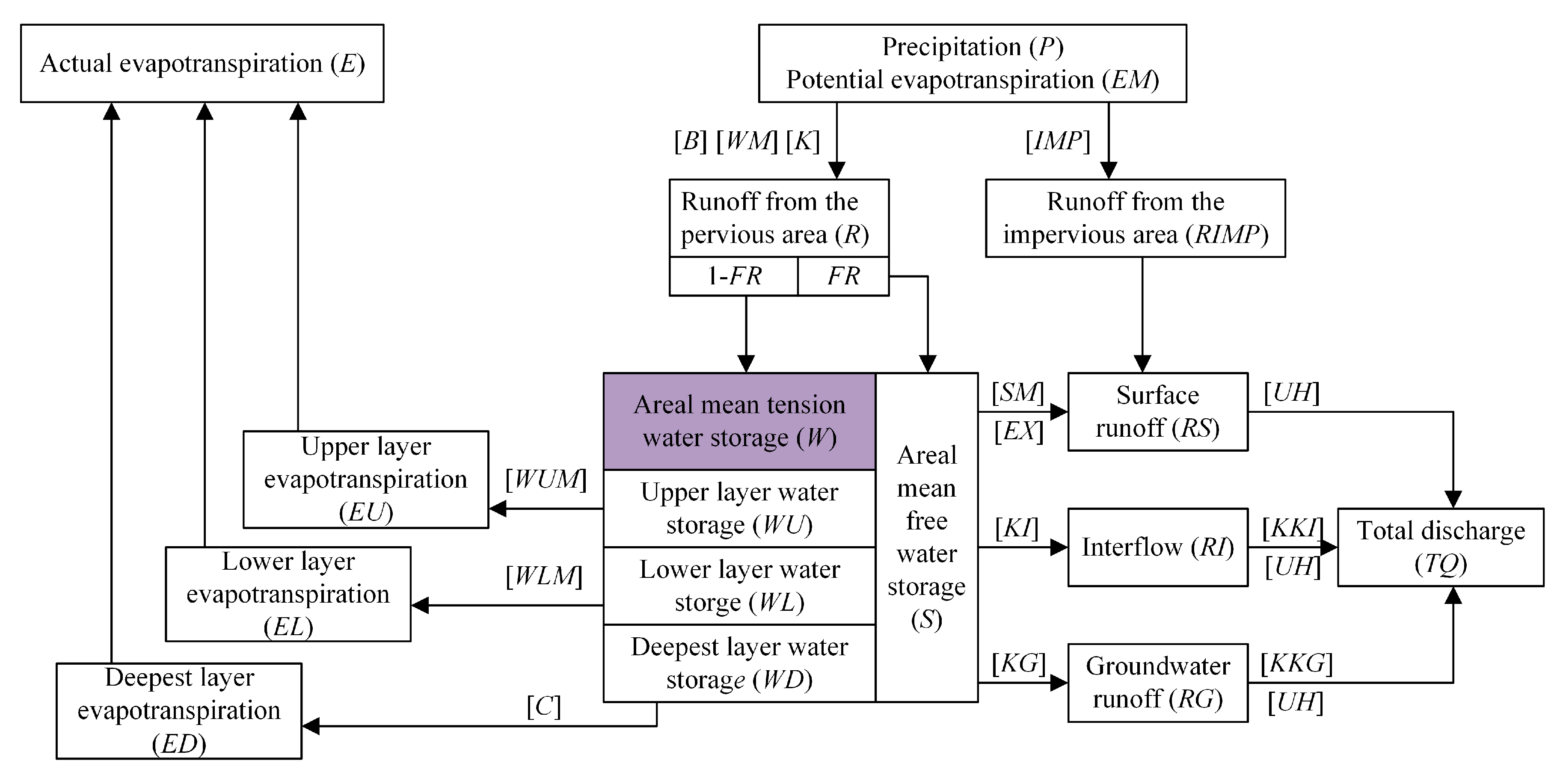
3.1. The Xinanjiang (XAJ) Model
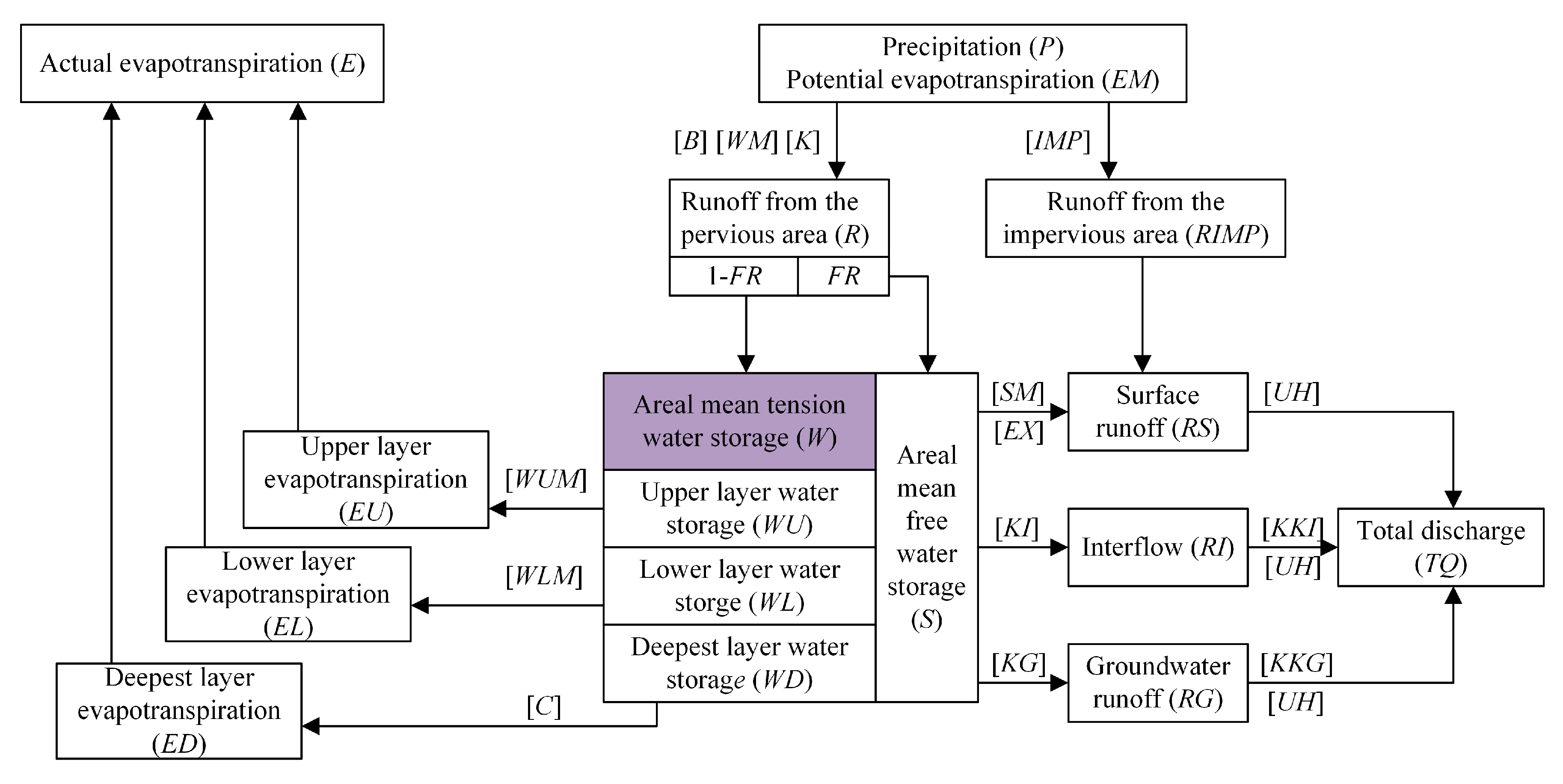
3.1.1. Model Structure
3.1.2. Model Parameters
3.1.3. Calculation of Soil Moisture
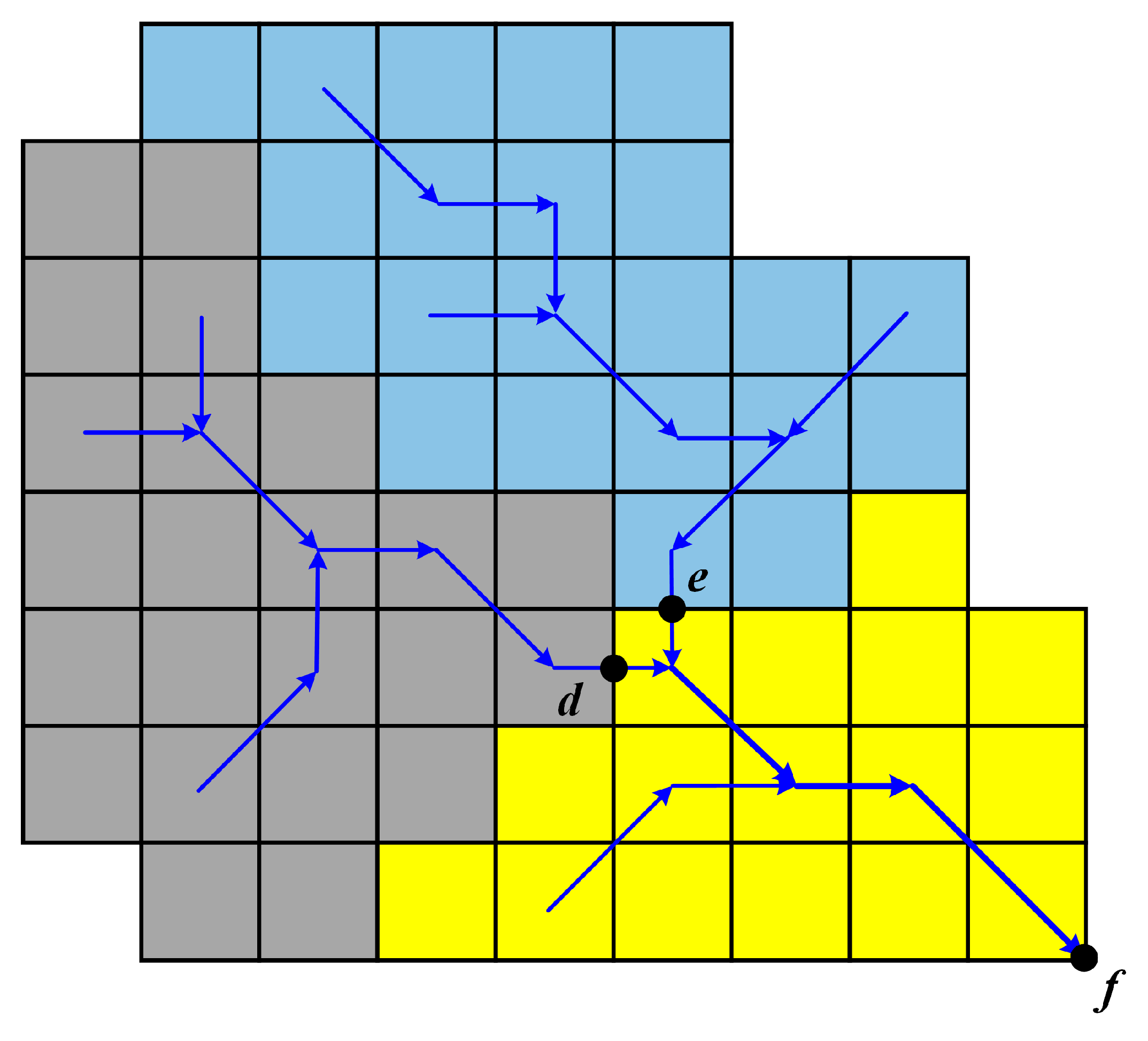
3.2. The DEM-Based Distributed Hydrological Model
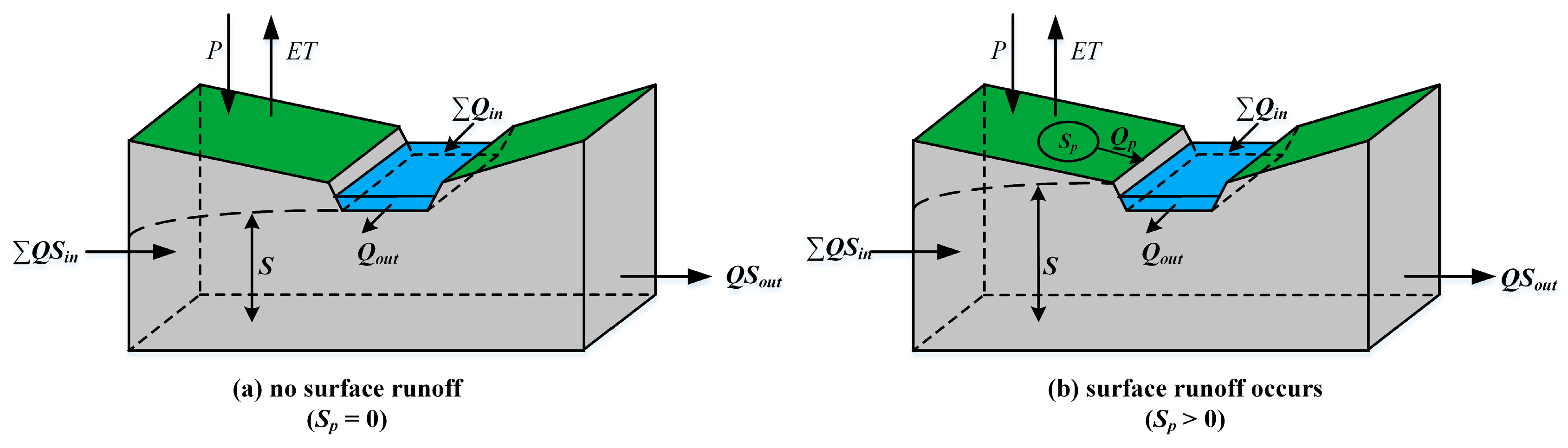
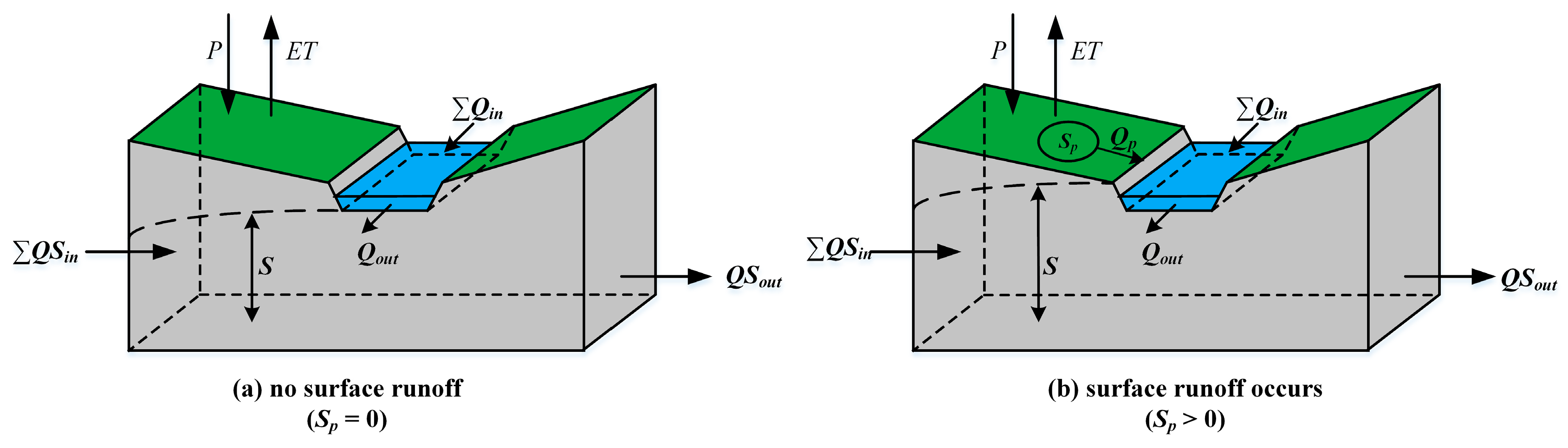
3.2.1. Grid Excess Rainfall Calculation
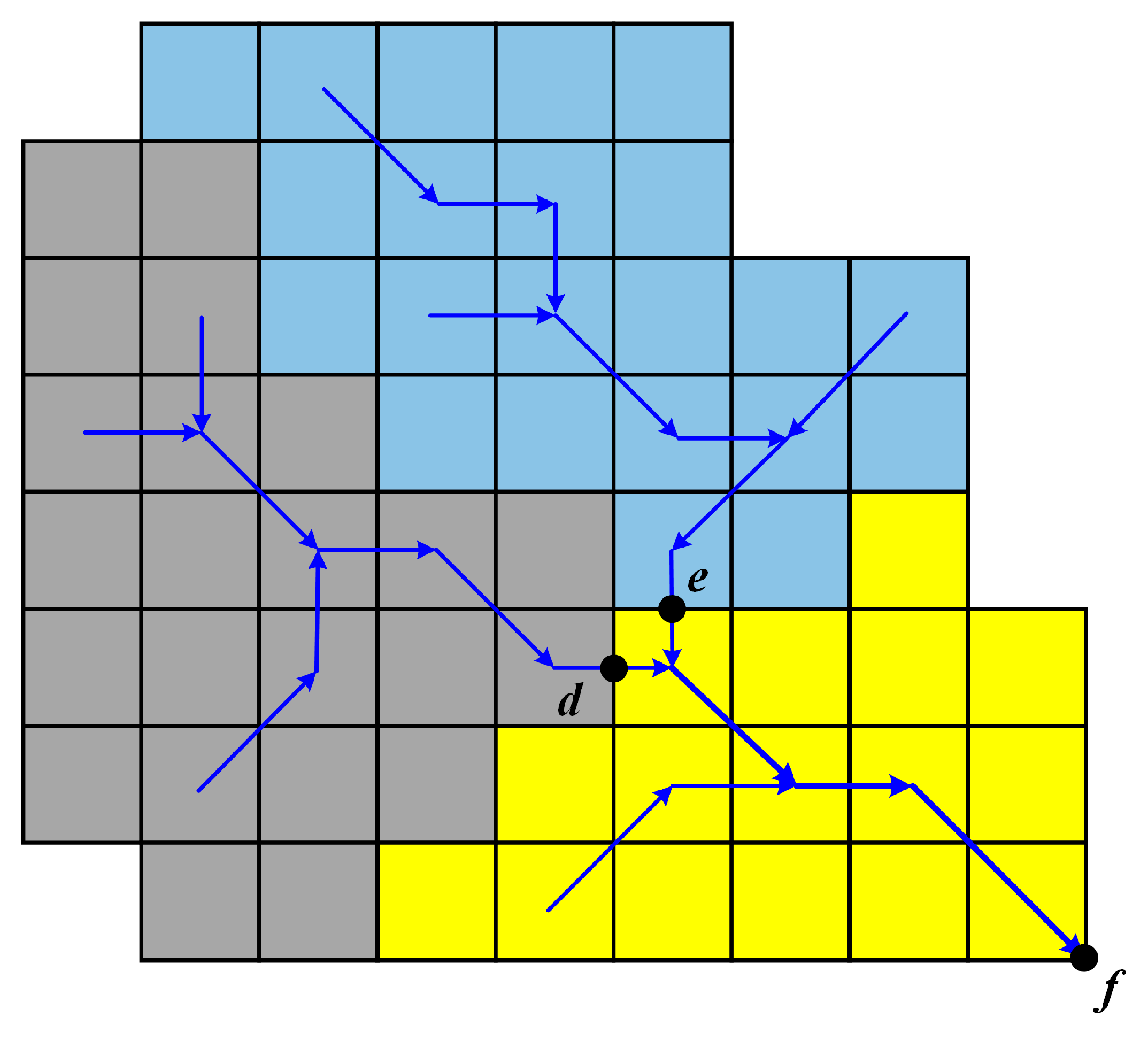
3.2.2. Sub-Catchment Outlet Streamflow Calculation by Grid Channel Routing
3.2.3. Streamflow Routing through River Networks
3.2.4. Model Parameters
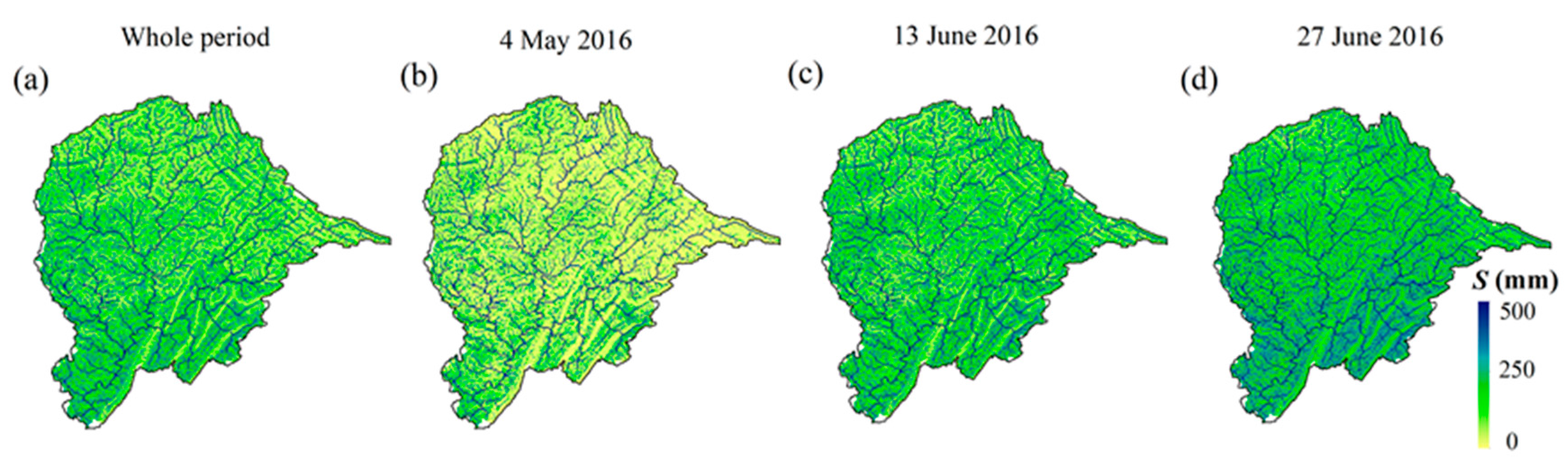
3.2.5. Calculation of Soil Moisture
3.3. Methodology of Comparisons
3.4. Indexes for Soil Moisture Comparisons
4. Results and Discussion
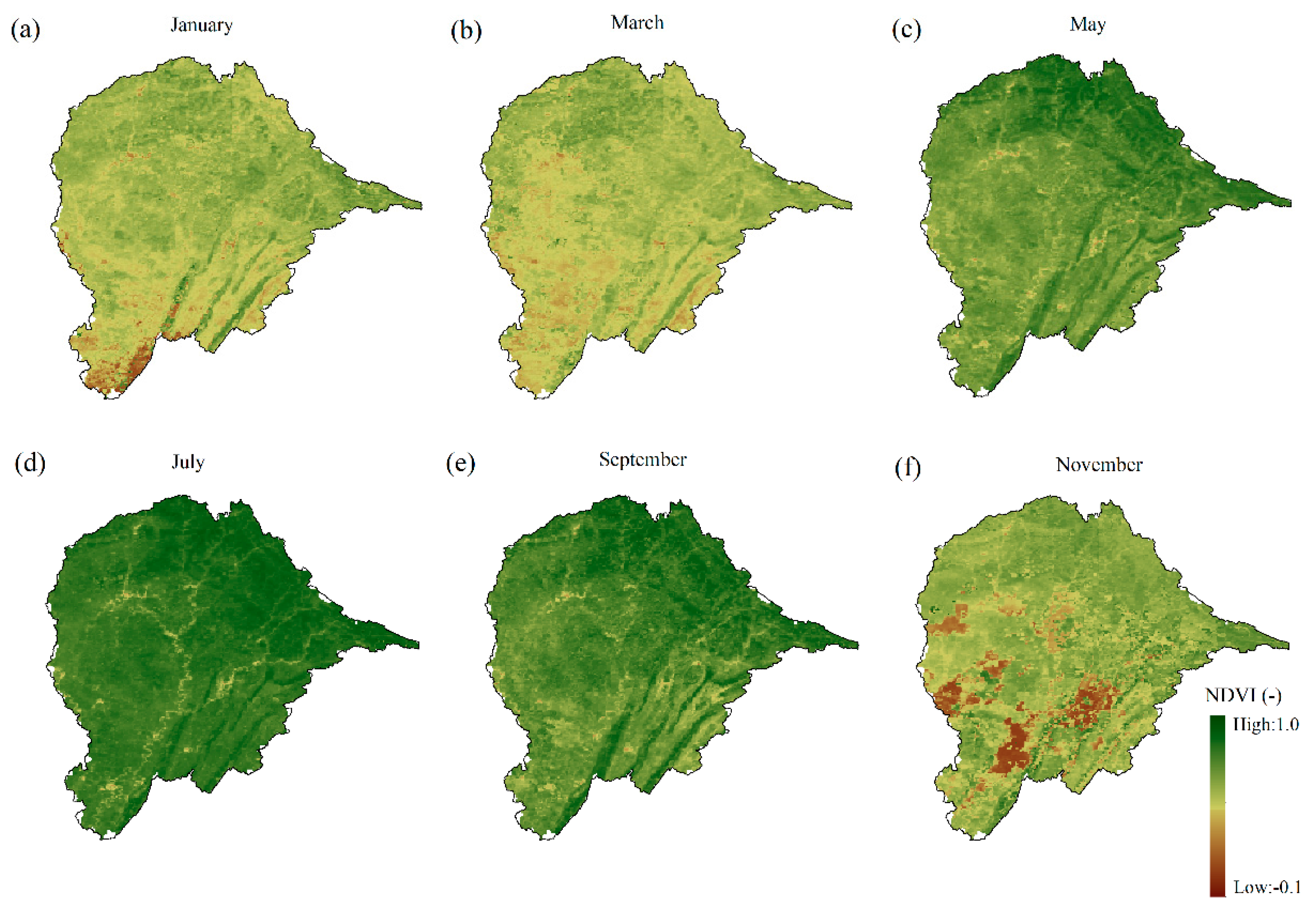
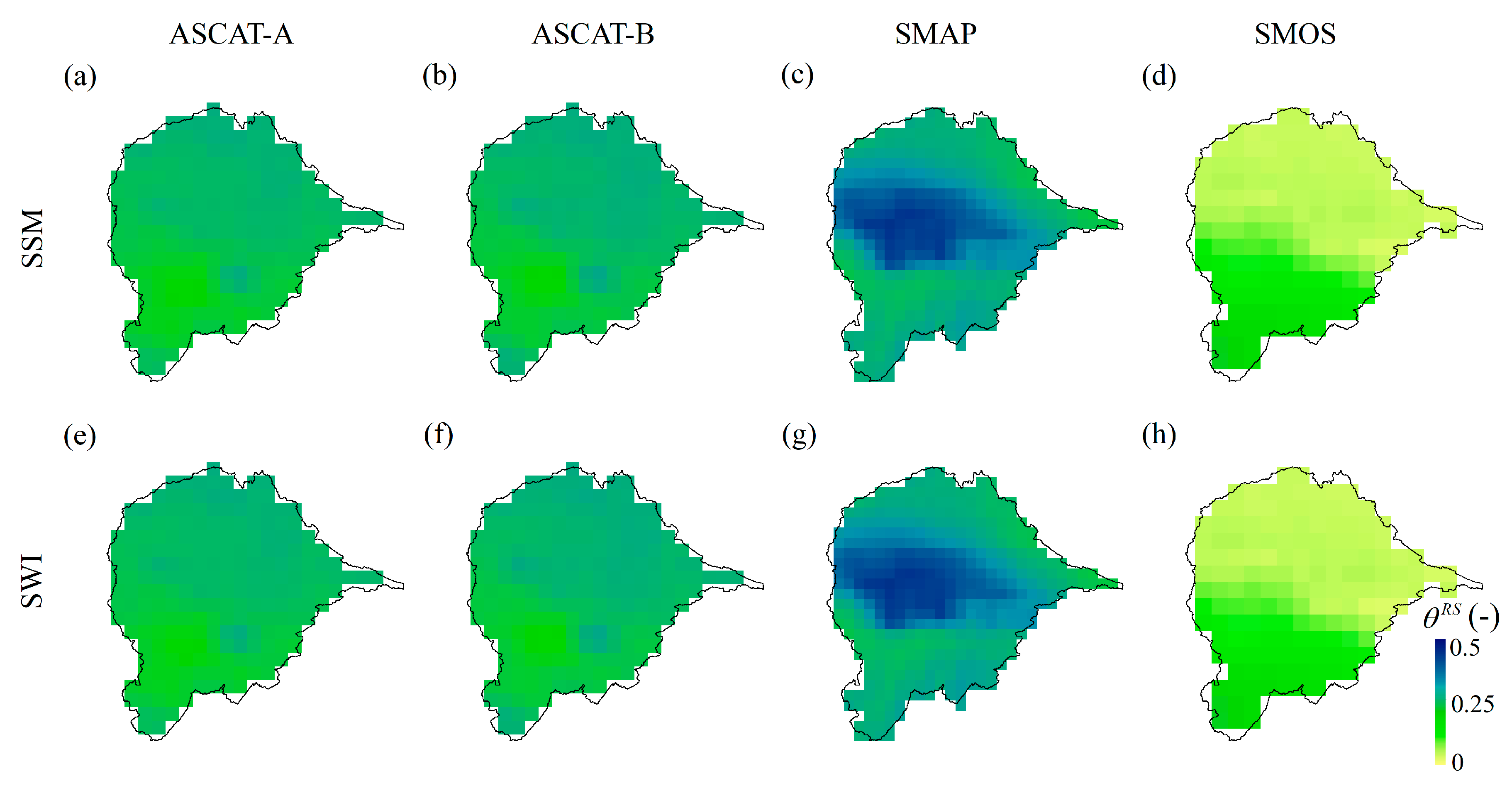
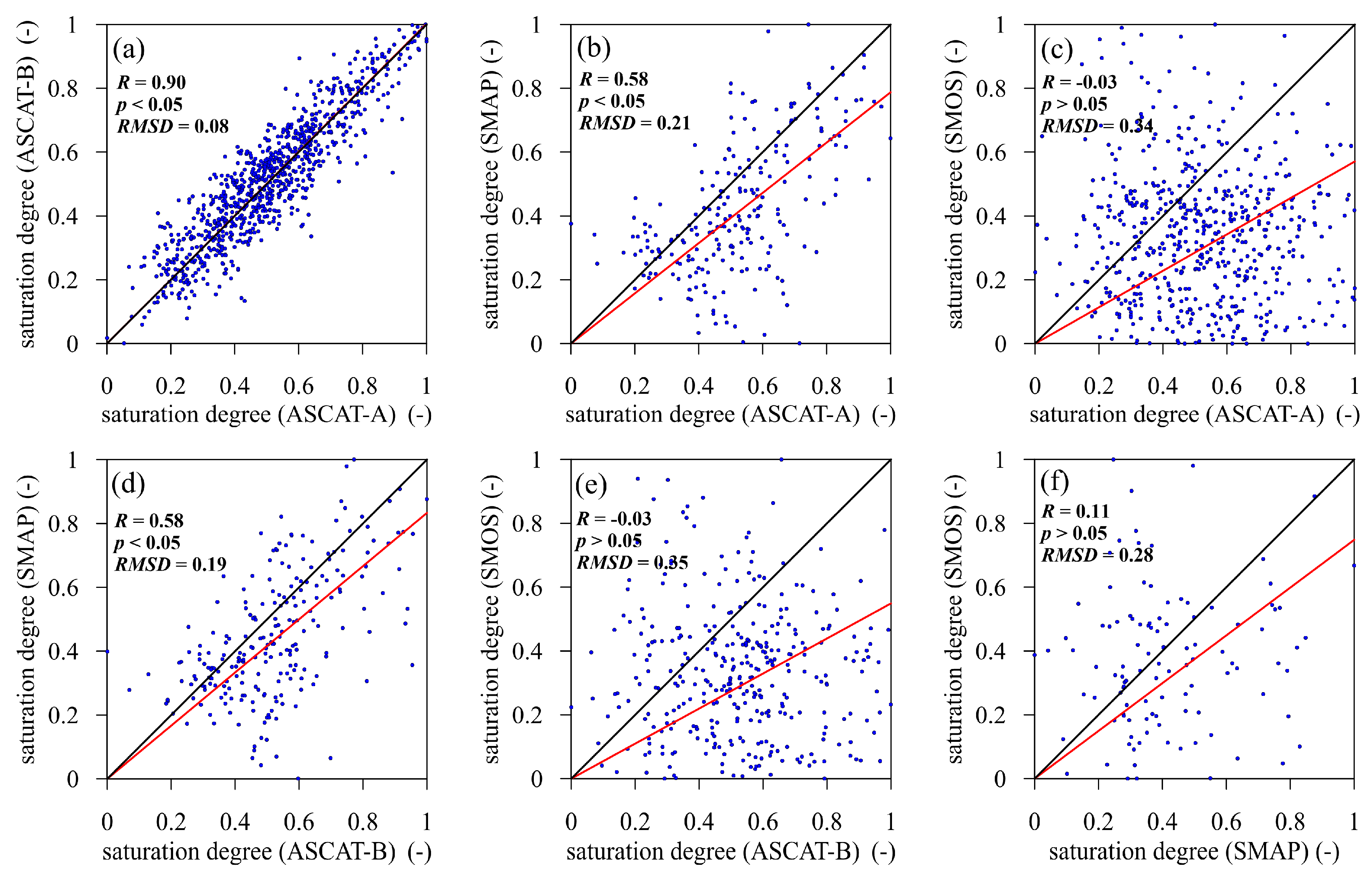
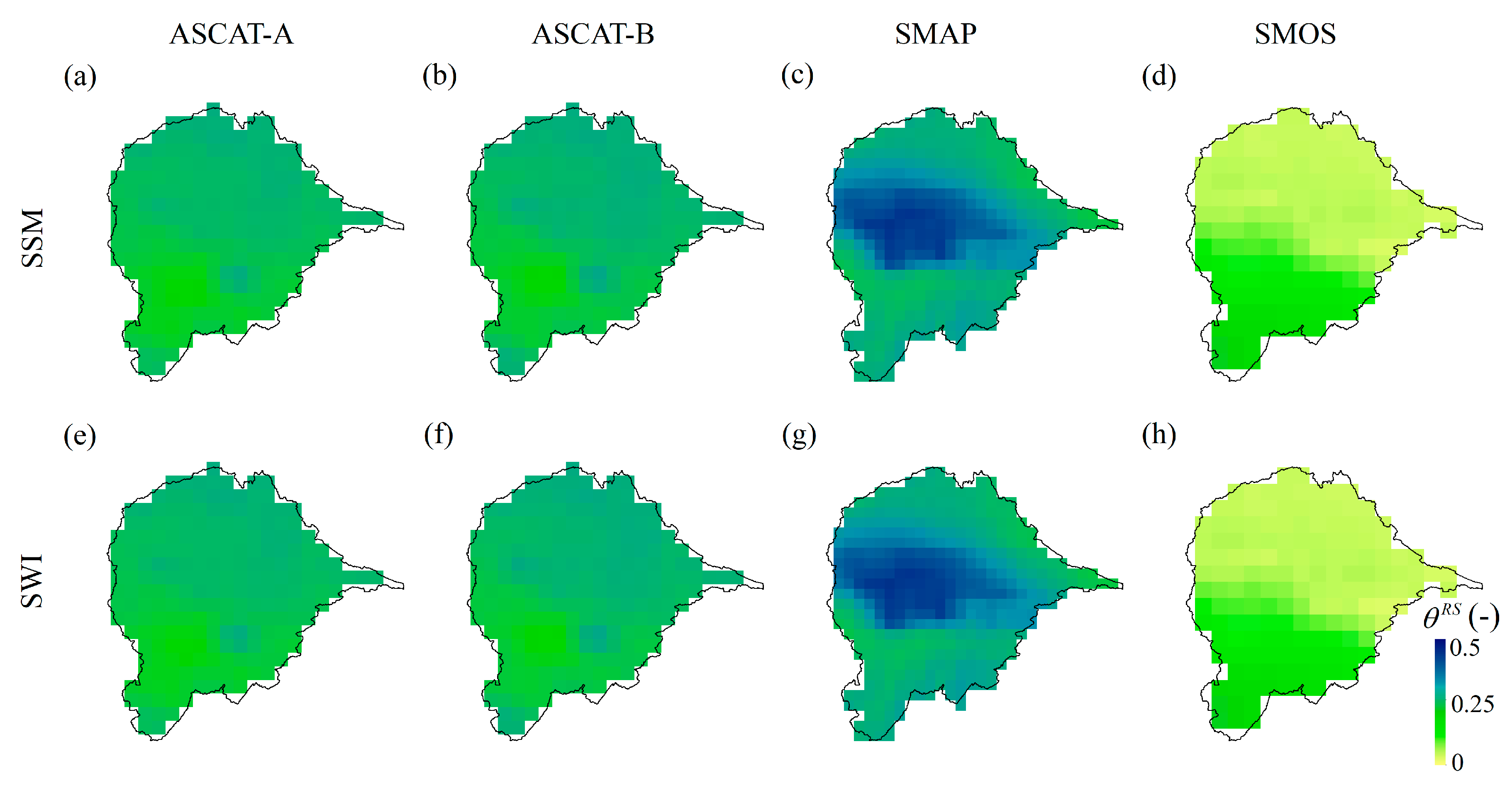
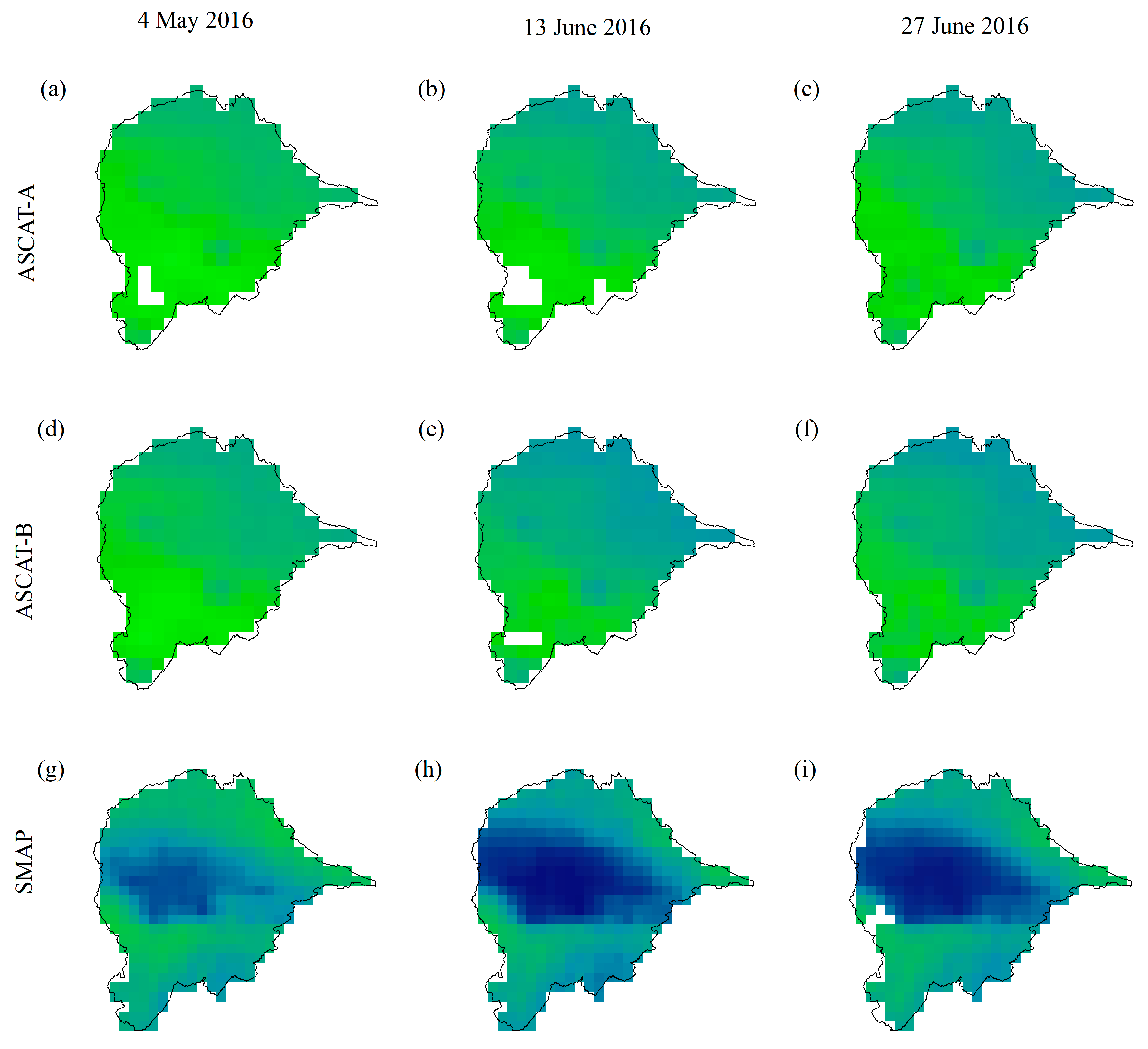
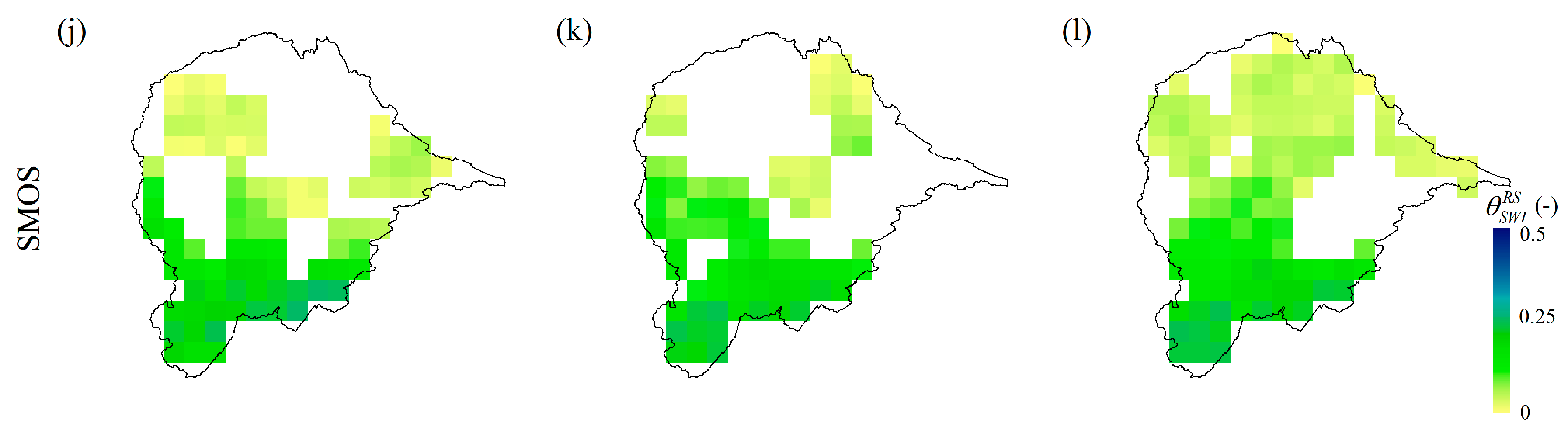
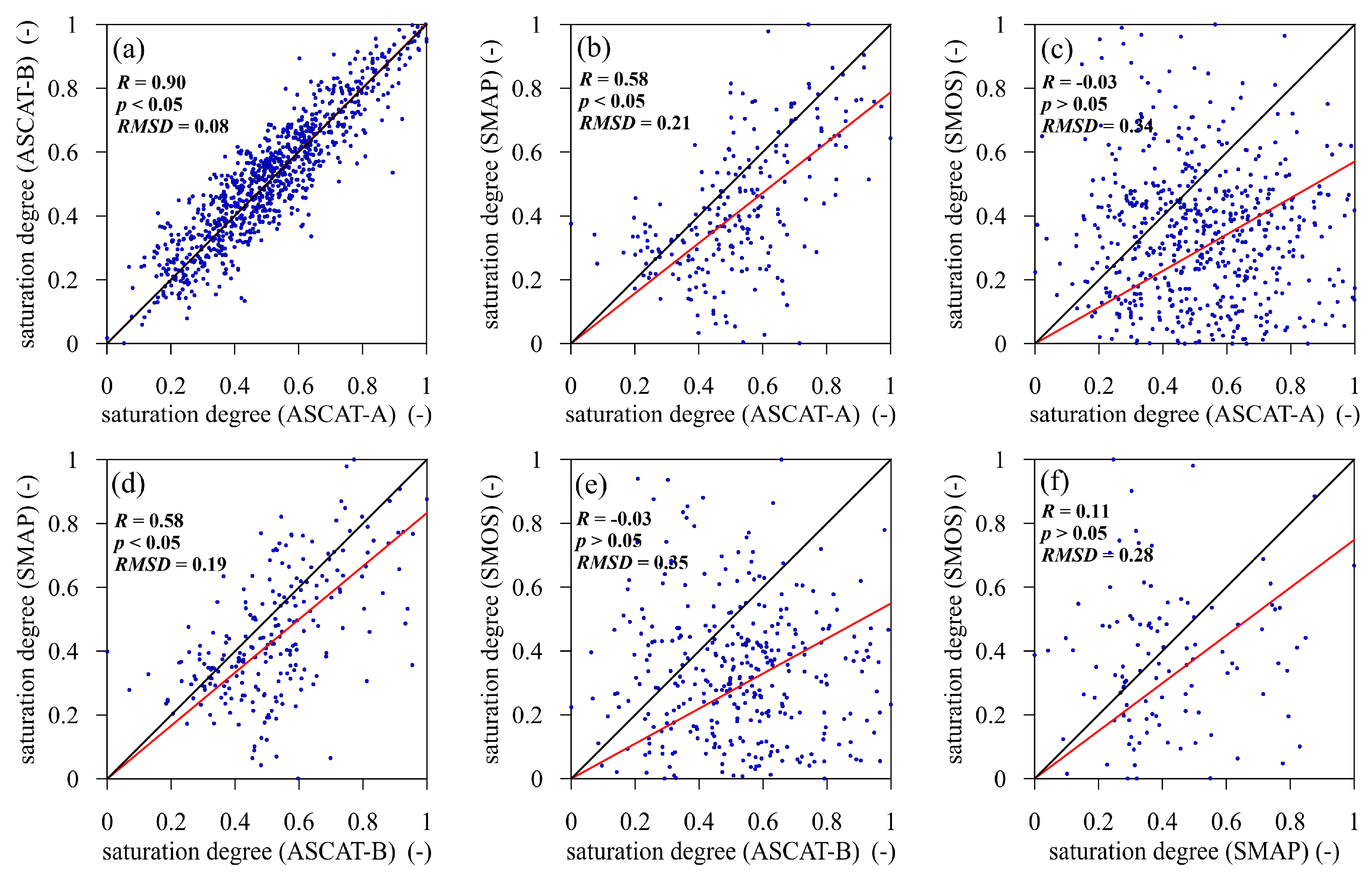
4.1. Remotely Sensed SSM and SWI from Satellites
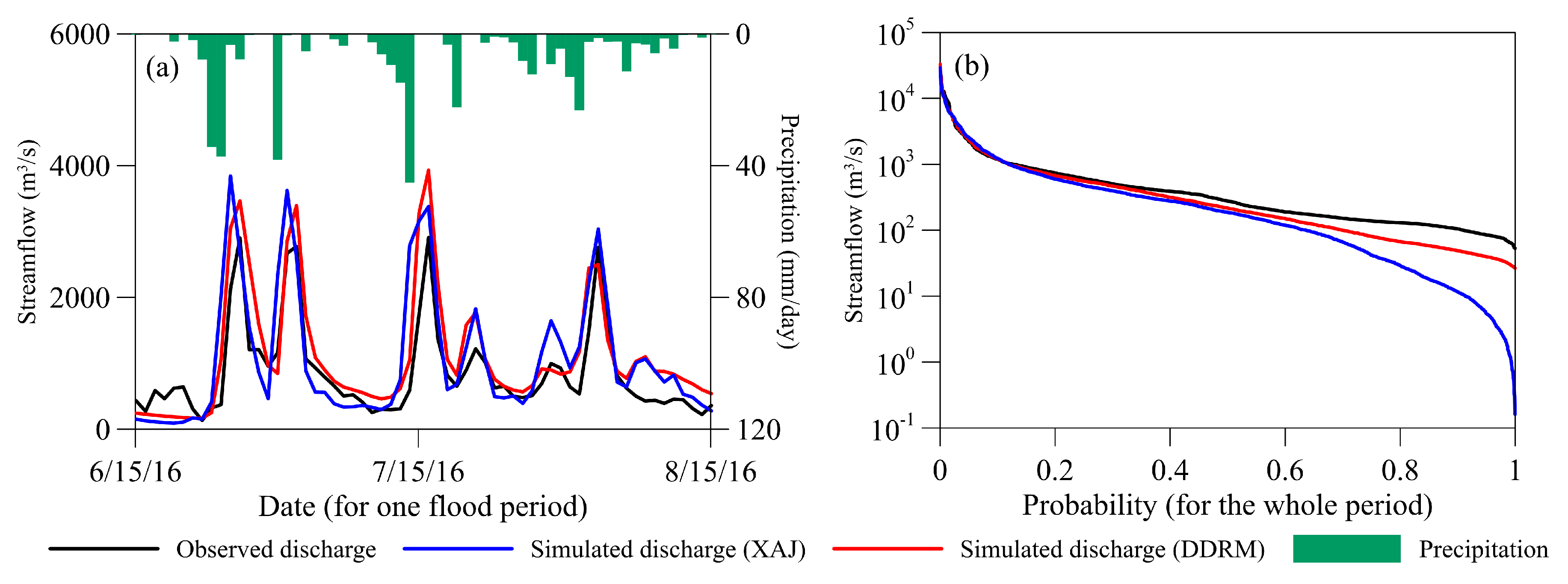
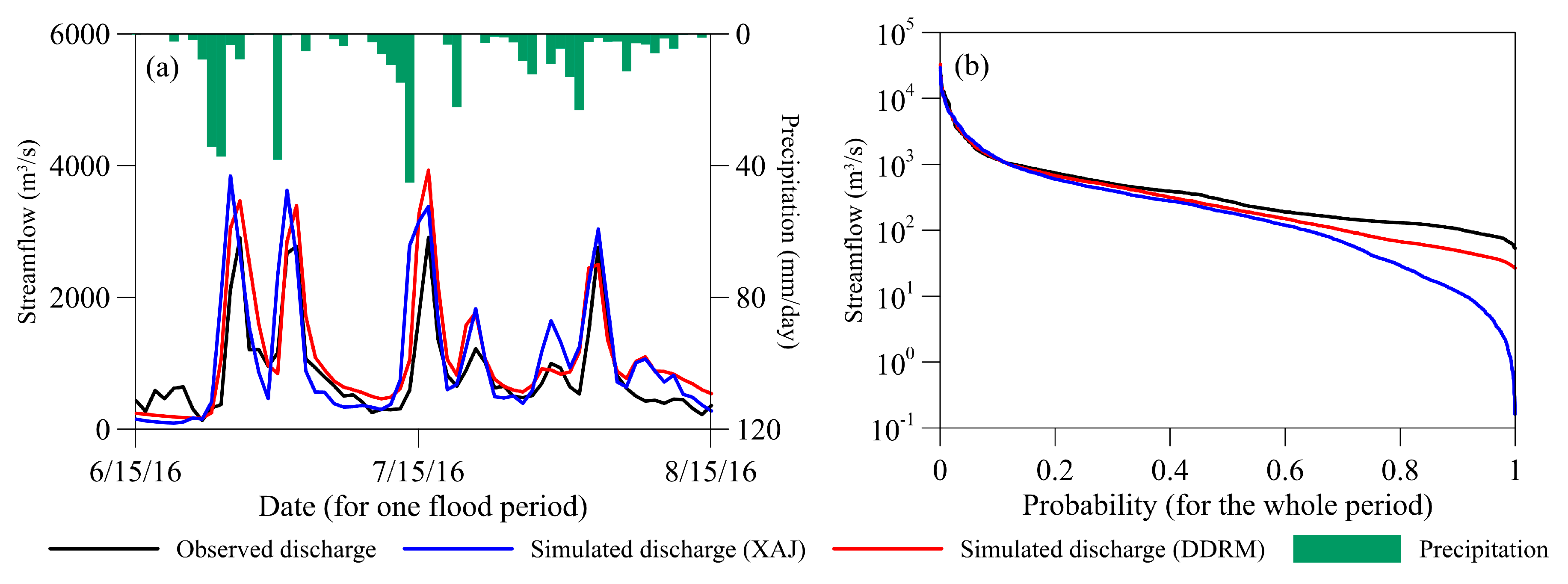
4.2. Simulations of Runoff and Soil Moisture Content by Hydrological Models
4.2.1. The XAJ Model
4.2.2. The DDRM
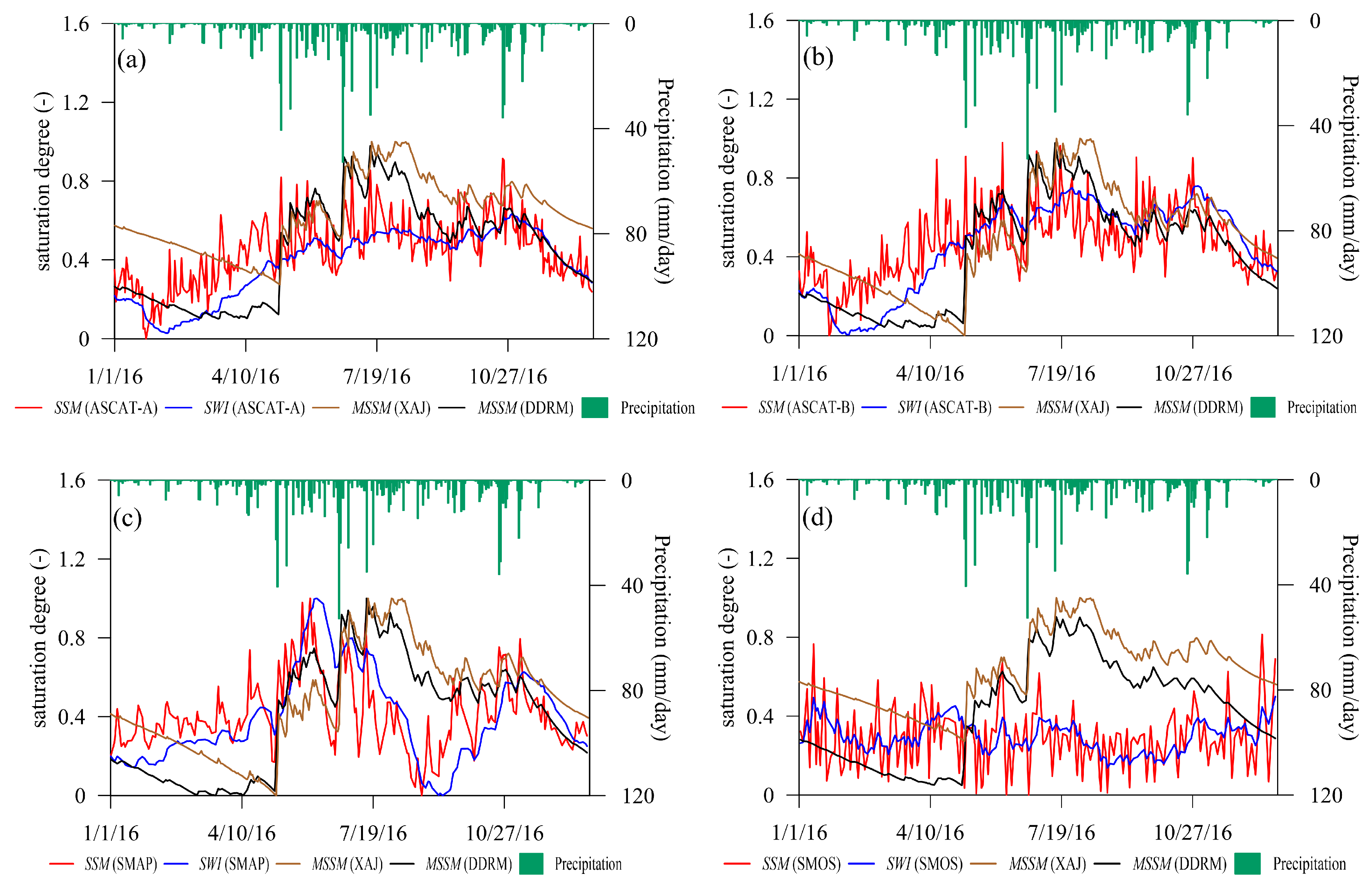
4.3. Comparisons of the Remotely Sensed and Model-Simulated Soil Moisture
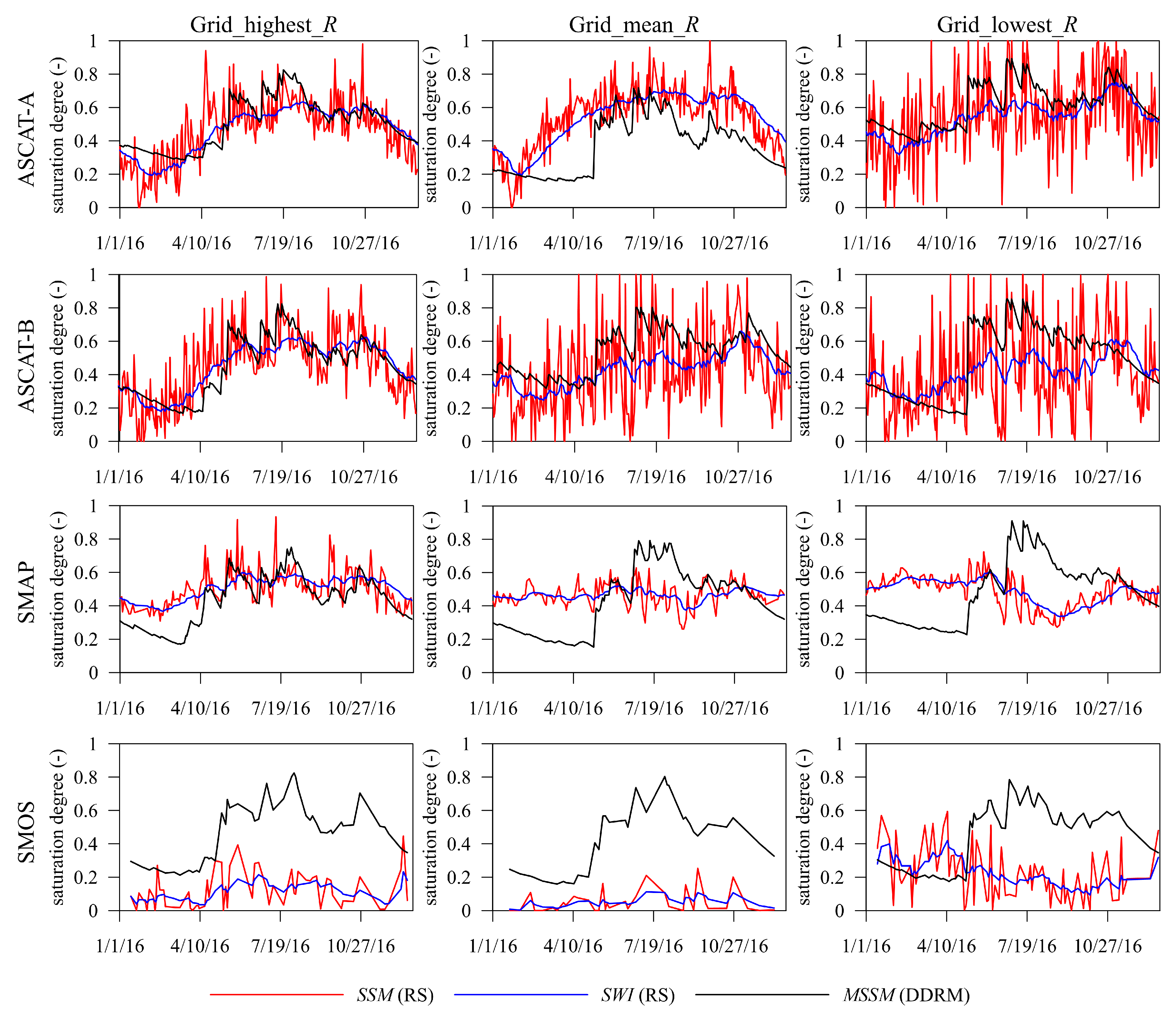
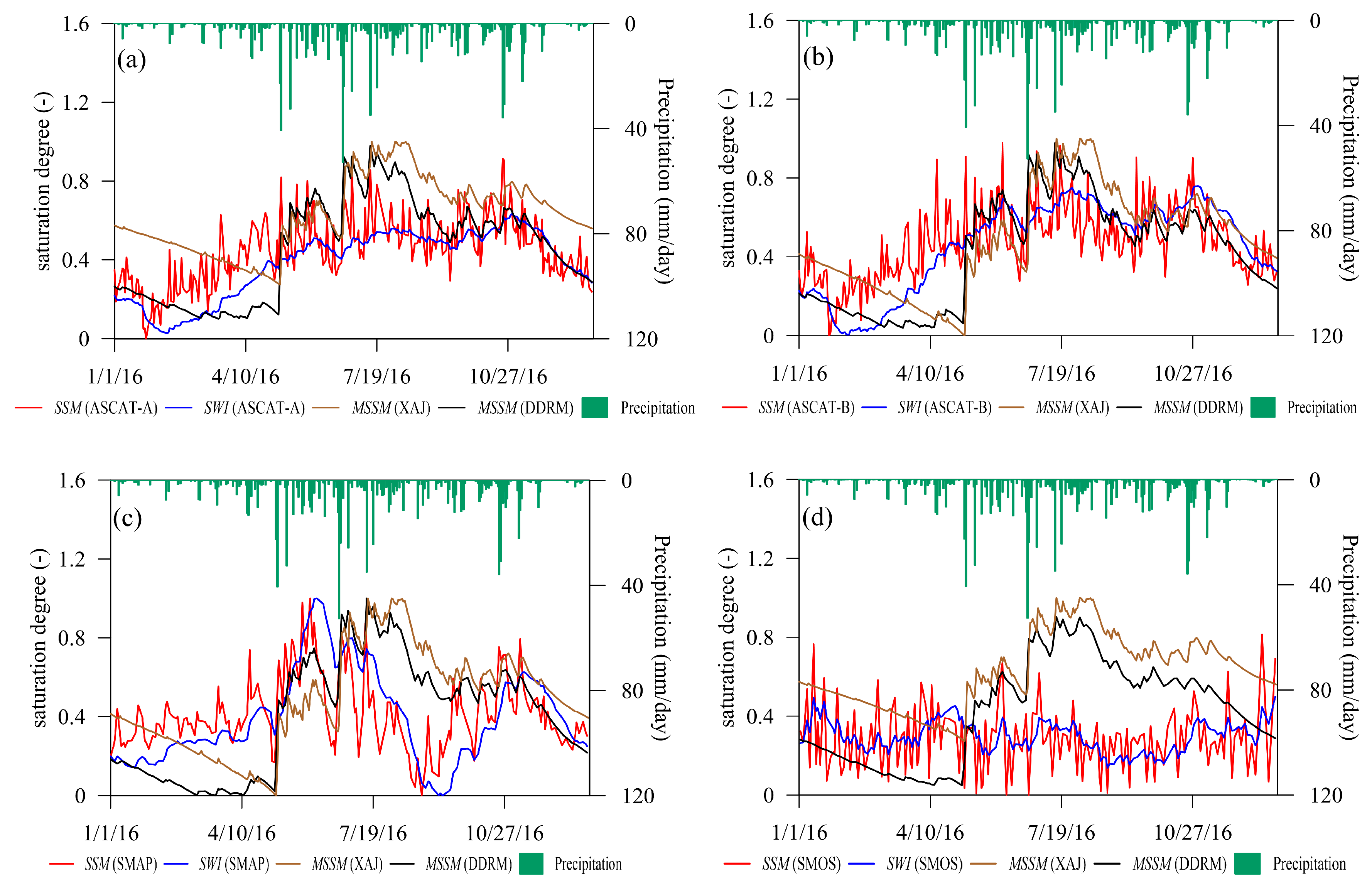
4.3.1. Catchment-Wide Average Values
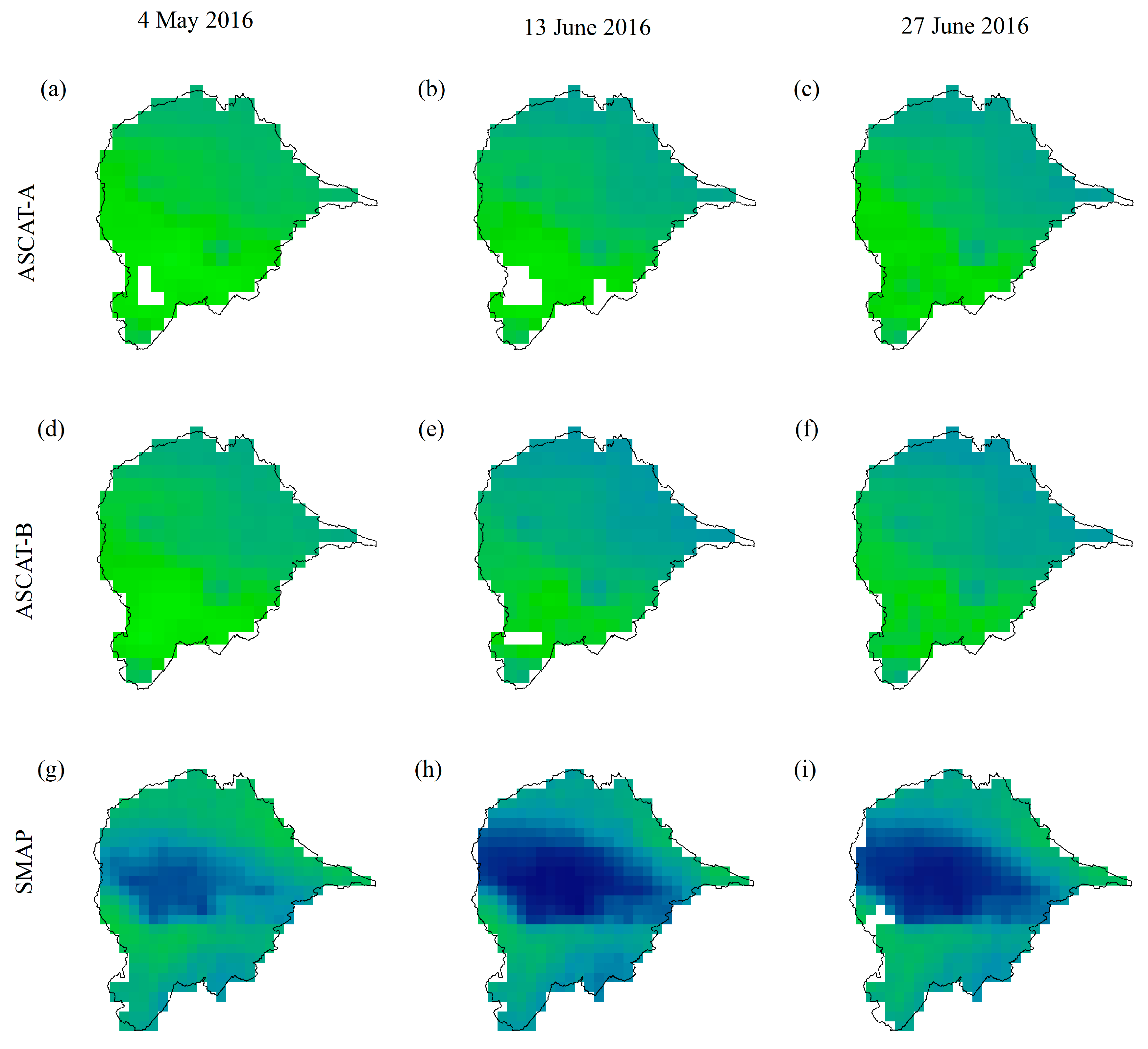
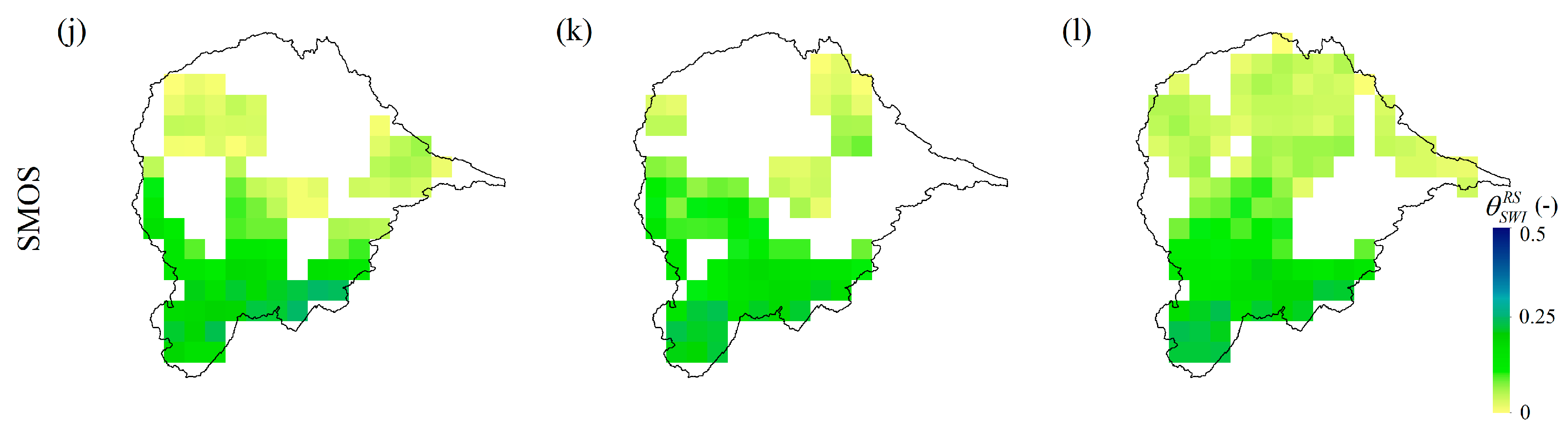
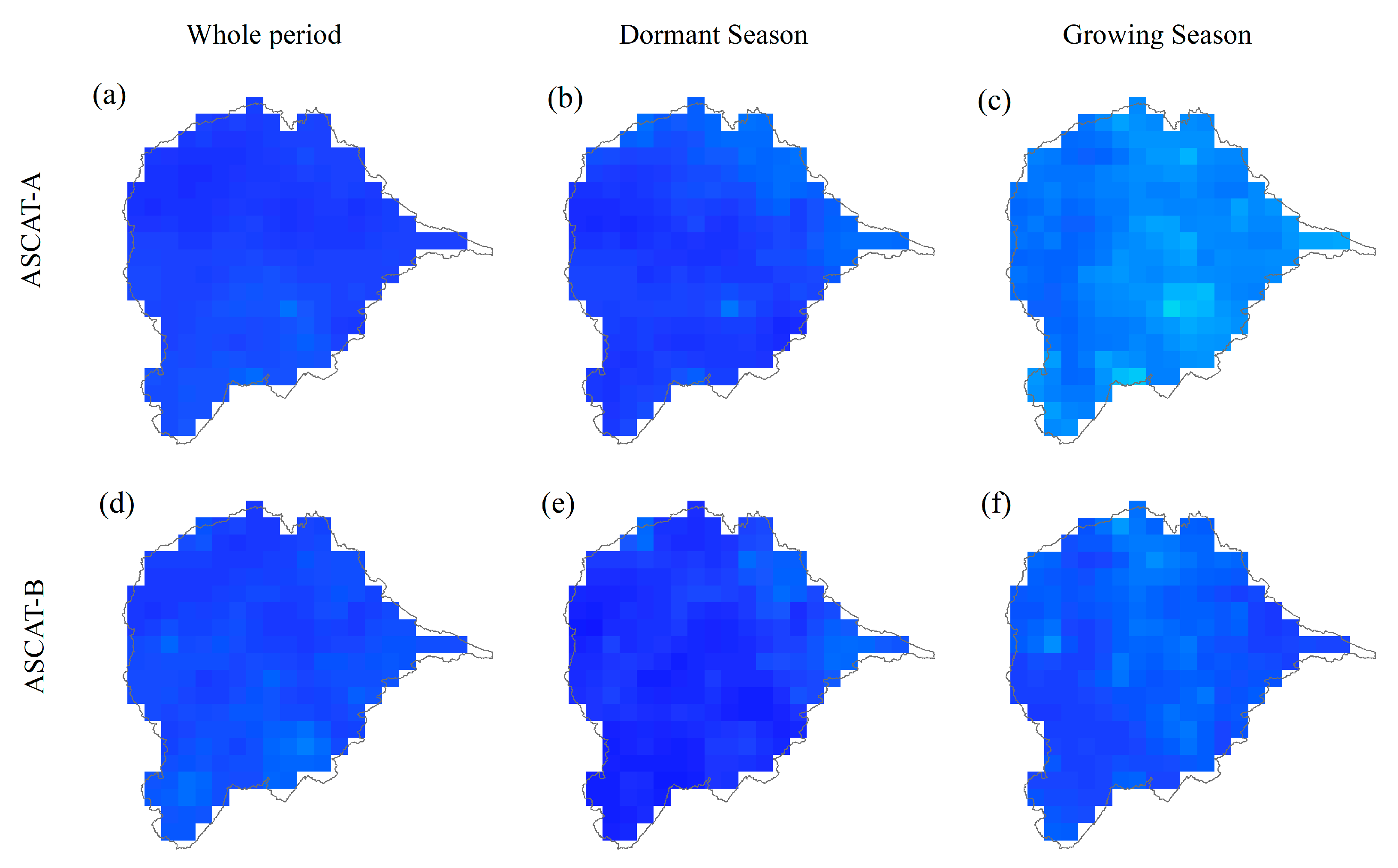
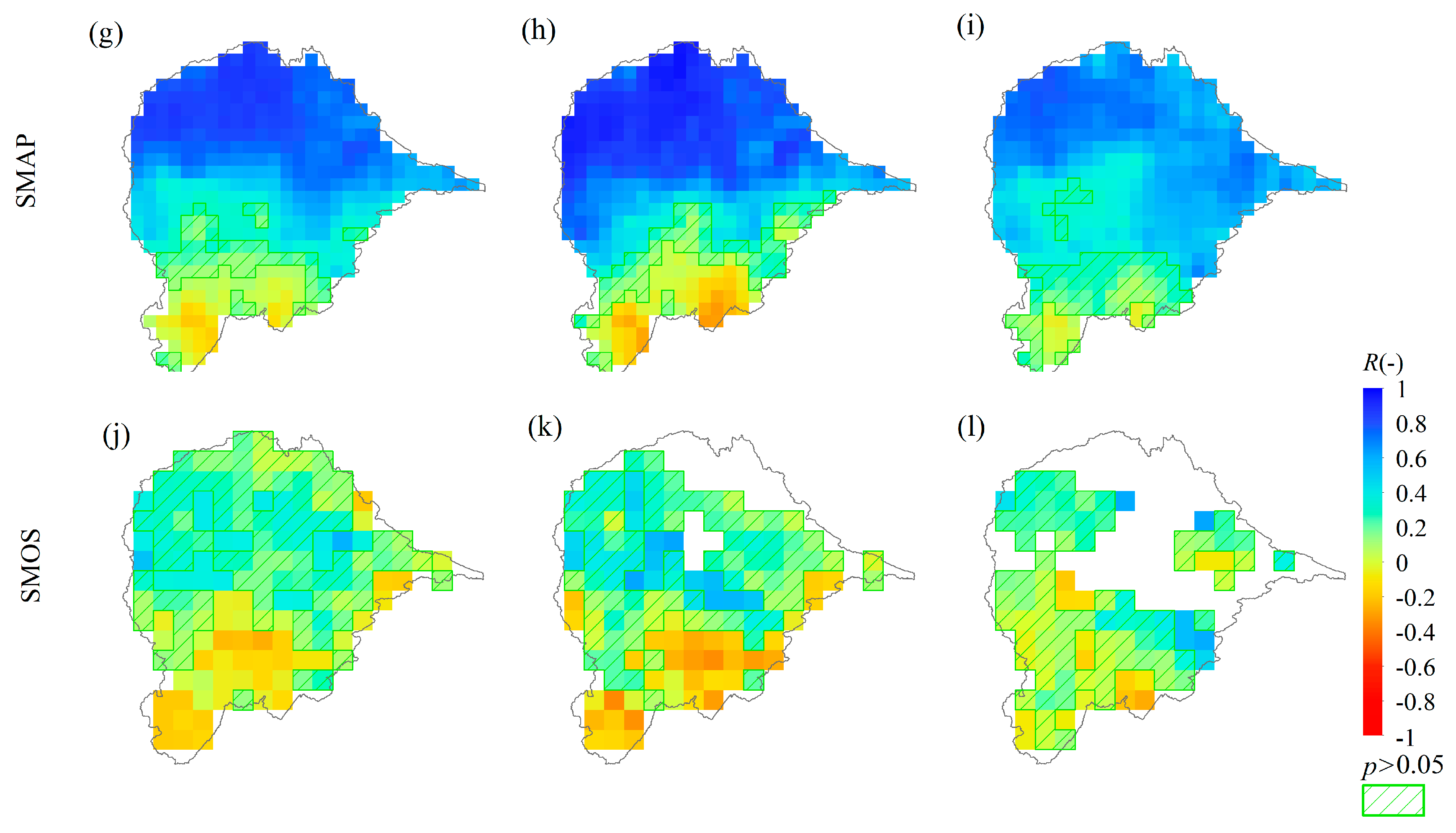
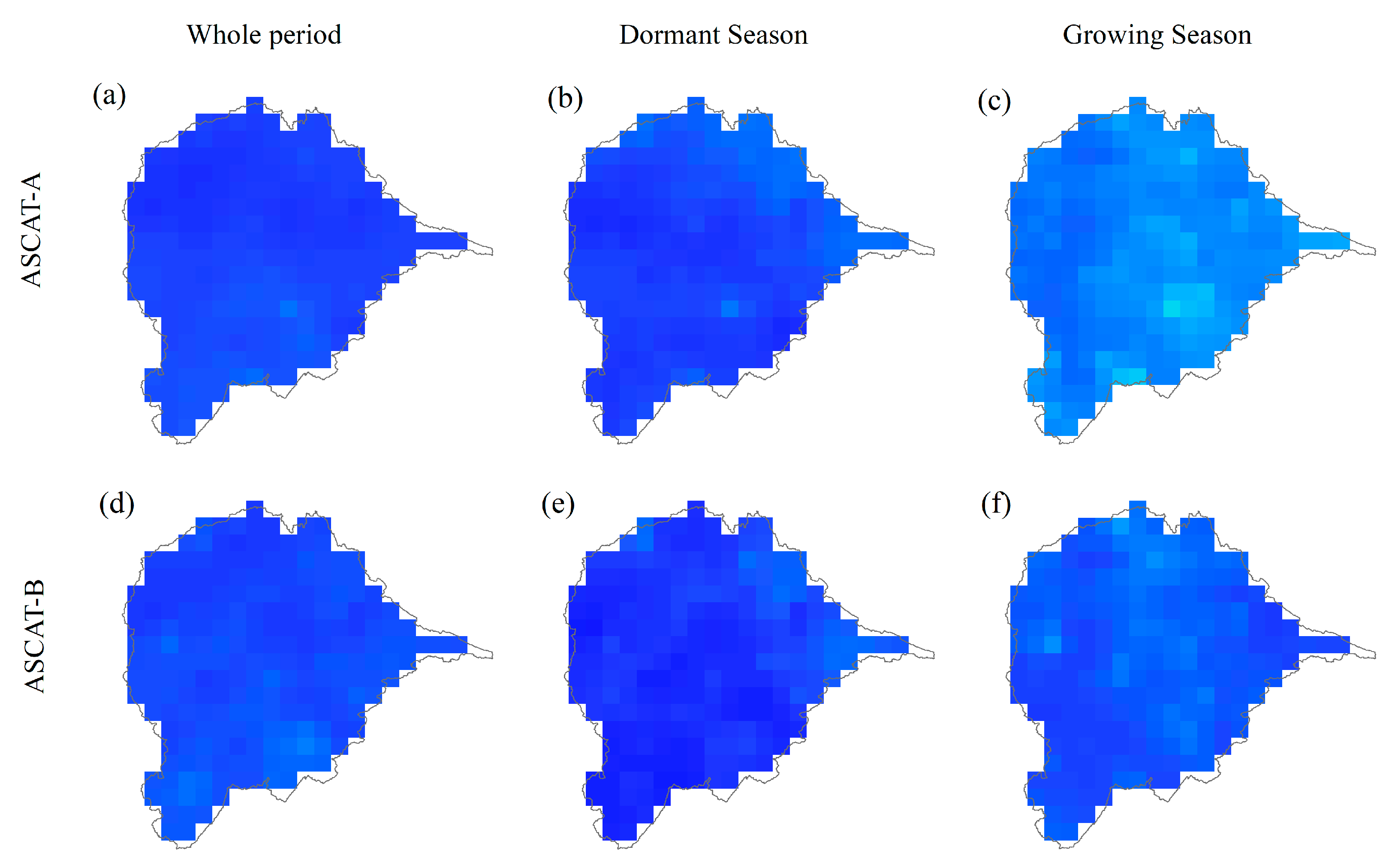
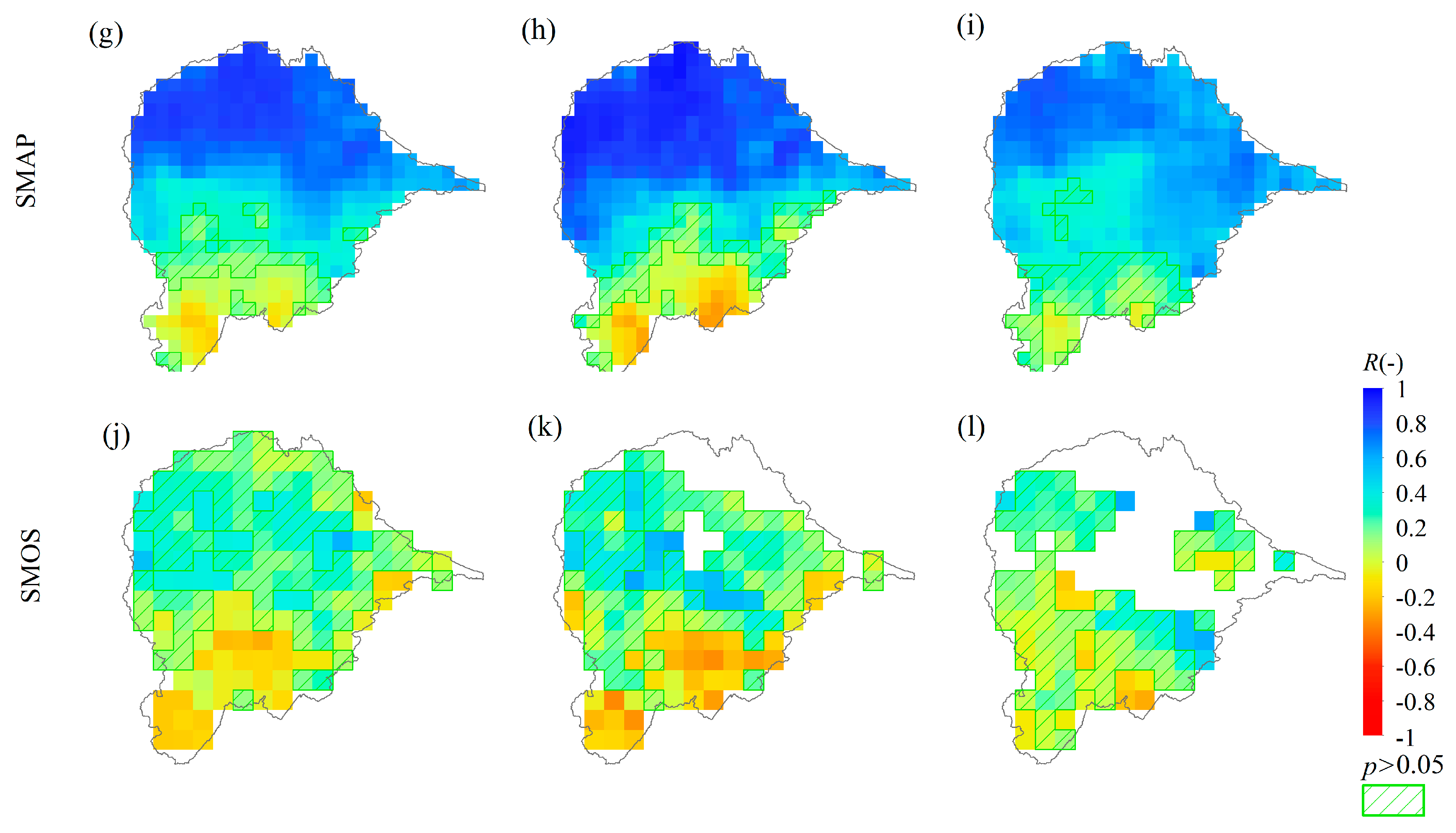
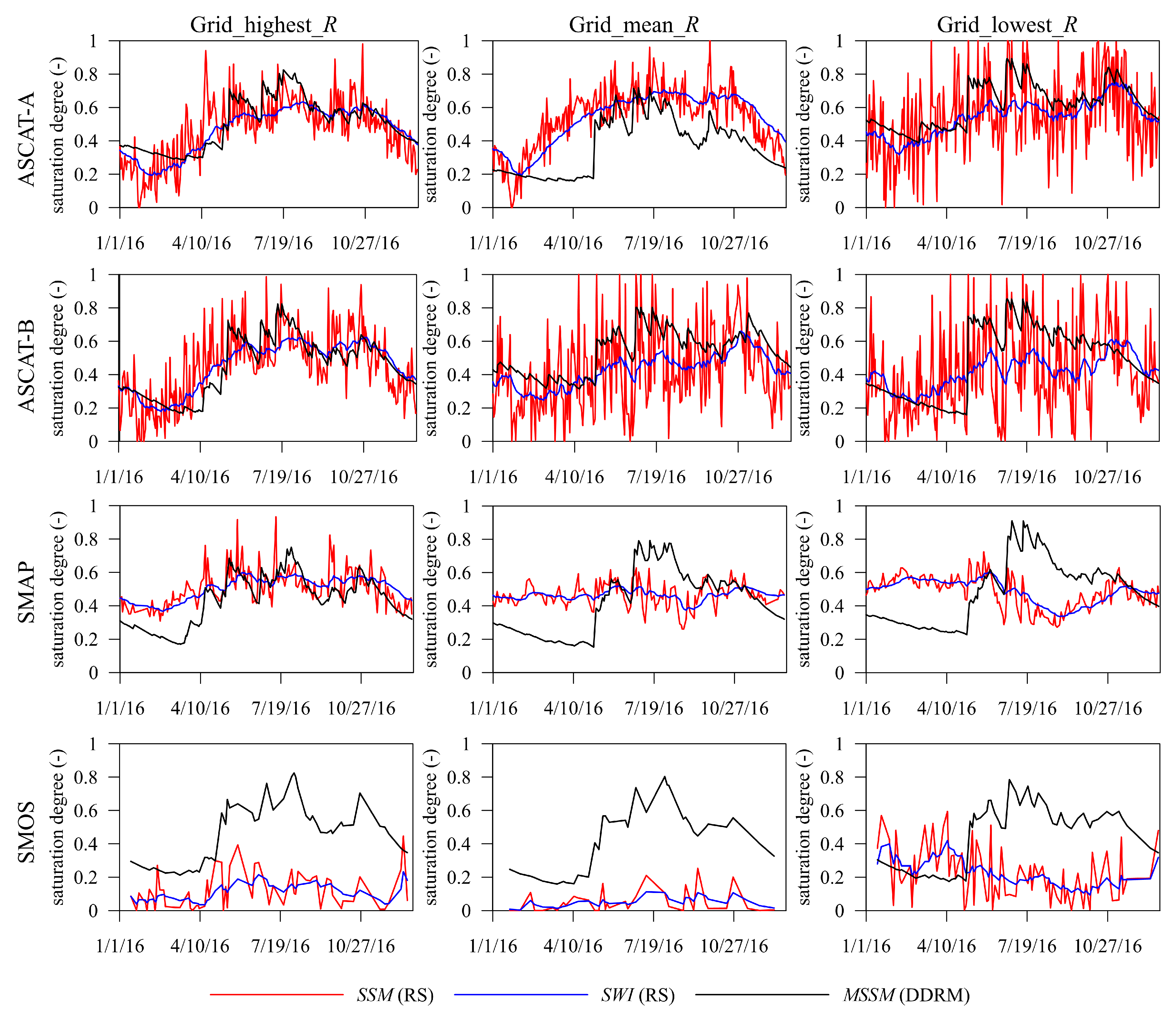
4.3.2. Spatial Distributions
5. Conclusions
- Soil moisture simulated by the XAJ model and DDRM tends to represent soil moisture of similar soil depth, and each satellite soil moisture product shows similar correlations when compared with soil moisture from XAJ model or DDRM.
- The quantitative assessments of the different results between SSM and SWI values in this study indicate that SWI is more likely to reveal the change of XAJ and DDRM model-simulated soil moisture. The characteristic time length of the exponential filter that maximizes the overall correlation coefficient R between catchment-wide remotely sensed SWI averages and model-simulated averages equals to 20 days in this study. Better results could be acquired for SWI when optimal T values are applied to sensors measuring different soil depth to be compared to different model-simulated soil moistures, since optimal T value is affected by a range of environmental factors, such as soil depth, soil texture, and climatic conditions and other soil or climatic variables.
- SMAP soil moisture values are higher than ASCAT and SMOS soil moisture values across the Qujiang catchment. ASCAT soil moisture products (ASCAT-A and ASCAT-B) show the highest agreement with the model-simulated soil moisture at both high spatial resolutions (i.e., grids) and large spatial scales (i.e., the whole catchment) for different seasons, followed by SMAP product. However, SMOS soil moisture product always shows low correlations with the model-simulated soil moisture.
- Correlation-coefficient values between the remotely sensed and the model-simulated soil moisture are likely influenced by different land use types. Different remotely sensed soil moisture products have different patterns in terms of correlation-coefficient values with model-simulated soil moisture in alpine (forest land) and flat regions (dry and cultivated land). The regional differences of correlations between the ASCAT products and model-simulated soil moisture are generally smaller than the differences between the SMAP product and model-simulated soil moisture. ASCAT products show similar correlations with the model-simulated soil moisture in either alpine or flat regions of the Qujiang catchment, while the SMAP product shows high correlation-coefficient values in the alpine regions, but dramatically lower figures in the flat regions, especially in dormant seasons. The difference may be due to the different retrieval algorithms between active and passive sensors.
- Although all remotely sensed soil moisture products agree better with the model-simulated soil moisture in dormant seasons, the consistency during these seasons might not be reliable because of slight changes of low soil moisture values and poor performances of streamflow simulations for models during these seasons.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wagner, W.; Scipal, K.; Pathe, C.; Gerten, D.; Lucht, W.; Rudolf, B. Evaluation of the agreement between the first global remotely sensed soil moisture data with model and precipitation data. J. Geophys. Res. Atmos. 2003, 108, 4611. [Google Scholar] [CrossRef]
- Tayfur, G.; Brocca, L. Fuzzy logic for rainfall-runoff modelling considering soil moisture. Water Resour. Manag. 2015, 29, 3519–3533. [Google Scholar] [CrossRef]
- Srivastava, P.K. Satellite soil moisture: Review of theory and applications in water resources. Water Resour. Manag. 2017, 31, 3161–3176. [Google Scholar] [CrossRef]
- Walker, J.P. Estimating Soil Moisture Profile Dynamics from Near-Surface Soil Moisture Measurements and Standard Meteorological Data. Ph.D. Thesis, University of Newcastle, Callaghan, Australia, 1999. [Google Scholar]
- Pal, M.; Maity, R.; Dey, S. Statistical Modelling of vertical soil moisture profile: Coupling of memory and forcing. Water Resour. Manag. 2016, 30, 1973–1986. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Parinussa, R.; Dorigo, W.A.; De Jeu, R.A.; Wagner, W.; Van Dijk, A.; McCabe, M.F.; Evans, J. Developing an improved soil moisture dataset by blending passive and active microwave satellite-based retrievals. Hydrol. Earth Syst. Sci. 2011, 15, 425–436. [Google Scholar] [CrossRef] [Green Version]
- Bartalis, Z.; Wagner, W.; Naeimi, V.; Hasenauer, S.; Scipal, K.; Bonekamp, H.; Figa, J.; Anderson, C. Initial soil moisture retrievals from the METOP-A Advanced Scatterometer (ASCAT). Geophys. Res. Lett. 2007, 34, L20401. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Al-Yaari, A.; Rodriguez-Fernandez, N.; Parrens, M.; Molero, B.; Leroux, D.; Birchera, S.; Mahmoodia, A.; Mialona, A.; Richaumea, P.; et al. Overview of SMOS performance in terms of global soil moisture monitoring after six years in operation. Remote Sens. Environ. 2016, 180, 40–63. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J. The soil moisture active passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Alexakis, D.; Mexis, F.-D.; Vozinaki, A.-E.; Daliakopoulos, I.; Tsanis, I. Soil moisture content estimation based on Sentinel-1 and auxiliary earth observation products. A hydrological approach. Sensors 2017, 17, 1455. [Google Scholar] [CrossRef] [PubMed]
- Xing, C.; Chen, N.; Zhang, X.; Gong, J. A machine learning based reconstruction method for satellite remote sensing of soil moisture images with in situ observations. Remote Sens. 2017, 9, 484. [Google Scholar] [CrossRef]
- Srivastava, P.K.; Han, D.; Rico-Ramirez, M.A.; Al-Shrafany, D.; Islam, T. Data fusion techniques for improving soil moisture deficit using SMOS satellite and WRF-NOAH land surface model. Water Resour. Manag. 2013, 27, 5069–5087. [Google Scholar] [CrossRef]
- Wanders, N.; Bierkens, M.F.; de Jong, S.M.; de Roo, A.; Karssenberg, D. The benefits of using remotely sensed soil moisture in parameter identification of large-scale hydrological models. Water Resour. Res. 2014, 50, 6874–6891. [Google Scholar] [CrossRef]
- Silvestro, F.; Gabellani, S.; Rudari, R.; Delogu, F.; Laiolo, P.; Boni, G. Uncertainty reduction and parameter estimation of a distributed hydrological model with ground and remote-sensing data. Hydrol. Earth Syst. Sci. 2015, 19, 1727–1751. [Google Scholar] [CrossRef]
- Zhao, R.J. The Xinanjiang model applied in China. J. Hydrol. 1992, 135, 371–381. [Google Scholar] [CrossRef]
- Beven, K. TOPMODEL: A critique. Hydrol. Process. 1997, 11, 1069–1085. [Google Scholar] [CrossRef]
- Xiong, L.; Guo, S.L.; Tian, X.R. DEM-based distributed hydrological model and its application. Adv. Water Sci. 2004, 15, 517–520. (In Chinese) [Google Scholar]
- Jackson, T.J.; Bindlish, R.; Cosh, M.H.; Zhao, T.; Starks, P.J.; Bosch, D.D.; Seyfried, M.; Moran, M.S.; Goodrich, D.C.; Kerr, Y.H. Validation of soil moisture and ocean salinity (SMOS) soil moisture over watershed networks in the US. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1530–1543. [Google Scholar] [CrossRef] [Green Version]
- Yee, M.S.; Walker, J.P.; Monerris, A.; Rüdiger, C.; Jackson, T.J. On the identification of representative in situ soil moisture monitoring stations for the validation of SMAP soil moisture products in Australia. J. Hydrol. 2016, 537, 367–381. [Google Scholar] [CrossRef]
- Rüdiger, C.; Calvet, J.C.; Gruhier, C.; Holmes, T.R.; De Jeu, R.A.; Wagner, W. An intercomparison of ERS-Scat and AMSR-E soil moisture observations with model simulations over France. J. Hydrometeorol. 2009, 10, 431–447. [Google Scholar] [CrossRef]
- Albergel, C.; Rüdiger, C.; Carrer, D.; Calvet, J.C.; Fritz, N.; Naeimi, V.; Bartalis, Z.; Hasenauer, S. An evaluation of ASCAT surface soil moisture products with in-situ observations in Southwestern France. Hydrol. Earth Syst. Sci. 2009, 13, 115–124. [Google Scholar] [CrossRef]
- Lacava, T.; Matgen, P.; Brocca, L.; Bittelli, M.; Pergola, N.; Moramarco, T.; Tramutoli, V. A first assessment of the SMOS soil moisture product with in situ and modeled data in Italy and Luxembourg. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1612–1622. [Google Scholar] [CrossRef]
- Dall’Amico, J.T.; Schlenz, F.; Loew, A.; Mauser, W. First results of SMOS soil moisture validation in the upper Danube catchment. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1507–1516. [Google Scholar] [CrossRef]
- Pan, M.; Cai, X.; Chaney, N.W.; Entekhabi, D.; Wood, E.F. An initial assessment of SMAP soil moisture retrievals using high-resolution model simulations and in situ observations. Geophys. Res. Lett. 2016, 43, 9662–9668. [Google Scholar] [CrossRef]
- Reichle, R.H.; Koster, R.D.; Dong, J.; Berg, A.A. Global soil moisture from satellite observations, land surface models, and ground data: Implications for data assimilation. J. Hydrometeorol. 2004, 5, 430–442. [Google Scholar] [CrossRef]
- Brocca, L.; Melone, F.; Moramarco, T.; Wagner, W.; Hasenauer, S. ASCAT soil wetness index validation through in situ and modeled soil moisture data in central Italy. Remote Sens. Environ. 2010, 114, 2745–2755. [Google Scholar] [CrossRef]
- Albergel, C.; De Rosnay, P.; Gruhier, C.; Muñoz-Sabater, J.; Hasenauer, S.; Isaksen, L.; Kerr, Y.; Wagner, W. Evaluation of remotely sensed and modelled soil moisture products using global ground-based in situ observations. Remote Sens. Environ. 2012, 118, 215–226. [Google Scholar] [CrossRef]
- Al-Yaari, A.; Wigneron, J.P.; Kerr, Y.; Rodriguez-Fernandez, N.; O’Neill, P.E.; Jackson, T.J.; De Lannoy, G.J.M.; Al Bitar, A.; Mialon, A.; Richaume, P.; et al. Evaluating soil moisture retrievals from ESA’s SMOS and NASA’s SMAP brightness temperature datasets. Remote Sens. Environ. 2017, 193, 257–273. [Google Scholar] [CrossRef]
- Parajka, J.; Naeimi, V.; Blöschl, G.; Komma, J. Matching ERS scatterometer based soil moisture patterns with simulations of a conceptual dual layer hydrologic model over Austria. Hydrol. Earth Syst. Sci. 2009, 13, 259–271. [Google Scholar] [CrossRef]
- Grillakis, M.G.; Koutroulis, A.G.; Komma, J.; Tsanis, I.K.; Wagner, W.; Blöschl, G. Initial soil moisture effects on flash flood generation—A comparison between basins of contrasting hydro-climatic conditions. J. Hydrol. 2016. [Google Scholar] [CrossRef]
- Alvarez-Garreton, C.; Ryu, D.; Western, A.W.; Crow, W.T.; Su, C.H.; Robertson, D.R. Dual assimilation of satellite soil moisture to improve streamflow prediction in data-scarce catchments. Water Resour. Res. 2016, 52, 5357–5375. [Google Scholar] [CrossRef]
- Tian, S.; Tregoning, P.; Renzullo, L.J.; van Dijk, A.I.; Walker, J.P.; Pauwels, V.; Allgeyer, S. Improved water balance component estimates through joint assimilation of GRACE water storage and SMOS soil moisture retrievals. Water Resour. Res. 2017, 53, 1820–1840. [Google Scholar] [CrossRef]
- Sinclair, S.; Pegram, G.G.S. A comparison of ASCAT and modelled soil moisture over South Africa, using TOPKAPI in land surface mode. Hydrol. Earth Syst. Sci. 2010, 14, 613–626. [Google Scholar] [CrossRef]
- Hain, C.R.; Crow, W.T.; Mecikalski, J.R.; Anderson, M.C.; Holmes, T. An intercomparison of available soil moisture estimates from thermal infrared and passive microwave remote sensing and land surface modeling. J. Geophys. Res. Atmos. 2011, 116. [Google Scholar] [CrossRef]
- Hu, Z.; Chen, Y.; Yao, L.; Wei, C.; Li, C. Optimal allocation of regional water resources: From a perspective of equity–efficiency tradeoff. Resour. Conserv. Recycl. 2016, 109, 102–113. [Google Scholar] [CrossRef]
- Nachtergaele, F.O.; van Velthuizen, H.; Verelst, L.; Batjes, N.H.; Dijkshoorn, J.A.; van Engelen, V.W.P.; Fischer, G.; Jone, A.; Montanarella, L.; Petri, M.; et al. Harmonized World Soil Database (Version 1.0); Food and Agriculture Organization of the UN (FAO); International Inst. for Applied Systems Analysis (IIASA); ISRIC-World Soil Information; Inst. of Soil Science-Chinese Academic of Sciences (ISS-CAS); EC-Joint Research Centre (JRC): Laxenburg, Austria, 2008. [Google Scholar]
- Saxton, K.E.; Rawls, W.J. Soil water characteristic estimates by texture and organic matter for hydrologic solutions. Soil Sci. Soc. Am. J. 2006, 70, 1569–1578. [Google Scholar] [CrossRef]
- Hargreaves, G.H.; Samani, Z.A. Estimating potential evapotranspiration. J. Irrig. Drain. Div. 1982, 108, 225–230. [Google Scholar]
- Tomczak, M. Spatial interpolation and its uncertainty using automated anisotropic inverse distance weighting (IDW)-cross-validation/jackknife approach. J. Geogr. Inf. Decis. Anal. 1998, 2, 18–30. [Google Scholar]
- Figa-Saldaña, J.; Wilson, J.J.; Attema, E.; Gelsthorpe, R.; Drinkwater, M.; Stoffelen, A. The advanced scatterometer (ASCAT) on the meteorological operational (MetOp) platform: A follow on for European wind scatterometers. Can. J. Remote Sens. 2002, 28, 404–412. [Google Scholar] [CrossRef]
- Anderson, C.; Figa, J.; Bonekamp, H.; Wilson, J.; Verspeek, J.; Stoffelen, A.; Portabella, M. Validation of backscatter measurements from the advanced scatterometer on MetOp-A. J. Atmos. Ocean. Technol. 2011, 29, 77–88. [Google Scholar] [CrossRef]
- Wagner, W.; Hahn, S.; Kidd, R.; Melzer, T.; Bartalis, Z.; Hasenauer, S.; Figa-Saldaña, J.; de Rosnay, P.; Jann, A.; Schneider, S. The ASCAT soil moisture product: A review of its specifications, validation results, and emerging applications. Meteorol. Z. 2013, 22, 5–33. [Google Scholar] [CrossRef]
- O’Neill, P.E.; Chan, S.; Njoku, E.G.; Jackson, T.; Bindlish, R. SMAP Enhanced L3 Radiometer Global Daily 9 km EASE-Grid Soil Moisture, Version 1. [Indicate Subset Used]. Boulder, Colorado USA. NASA National Snow and Ice Data Center Distributed Active Archive Center. 2016. Available online: http://dx.doi.org/10.5067/ZRO7EXJ8O3XI (accessed on 27 May 2017).
- Zeng, J.; Chen, K.S.; Bi, H.; Chen, Q. A preliminary evaluation of the SMAP radiometer soil moisture product over United States and Europe using ground-based measurements. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4929–4940. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Richaume, P.; Wigneron, J.P.; Ferrazzoli, P.; Mahmoodi, A.; Al Bitar, A.; Cabot, F.; Gruhier, C.; Juglea, S.E. The SMOS soil moisture retrieval algorithm. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1384–1403. [Google Scholar] [CrossRef]
- Wigneron, J.P.; Kerr, Y.; Waldteufel, P.; Saleh, K.; Escorihuela, M.J.; Richaume, P.; Ferrazzoll, P.; de Rosnay, P.; Gurney, R.; Calvet, J.C.; et al. L-band microwave emission of the biosphere (L-MEB) model: Description and calibration against experimental data sets over crop fields. Remote Sens. Environ. 2007, 107, 639–655. [Google Scholar] [CrossRef]
- Al-Yaari, A.; Wigneron, J.P.; Ducharne, A.; Kerr, Y.H.; Wagner, W.; De Lannoy, G.; Reichle, R.; Al Bitar, A.; Dorigo, W.; Richaume, P.; et al. Global-scale comparison of passive (SMOS) and active (ASCAT) satellite based microwave soil moisture retrievals with soil moisture simulations (MERRA-Land). Remote Sens. Environ. 2014, 152, 614–626. [Google Scholar] [CrossRef] [Green Version]
- Wagner, W.; Lemoine, G.; Rott, H. A Method for Estimating Soil Moisture from ERS Scatterometer and Soil Data. Remote Sens. Environ. 1999, 70, 191–207. [Google Scholar] [CrossRef]
- Hu, C.; Guo, S.L.; Xiong, L.; Peng, D. A modified Xinanjiang model and its application in northern China. Hydrol. Res. 2005, 36, 175–192. [Google Scholar]
- Duan, Q.; Sorooshian, S.; Gupta, V. Effective and efficient global optimization for conceptual rainfall-runoff models. Water Resour. Res. 1992, 28, 1015–1031. [Google Scholar] [CrossRef]
- Xiong, L.; Guo, S.L.; Chen, H.; Lin, K.R.; Cheng, J.-Q. Application of the hydro-network model in the distributed hydrological modeling. J. China Hydrol. 2007, 2, 005. (In Chinese) [Google Scholar]
- Xiong, L.; Guo, S.L. Distributed Watershed Hydrological Model; China Water Power Press: Beijing, China, 2004. [Google Scholar]
- Long, H.-F.; Xiong, L.; Wan, M. Application of DEM-based distributed hydrological model in Qingjiang river basin. Resour. Environ. Yangtze Basin 2012, 21, 71–78. (In Chinese) [Google Scholar]
- Jones, R. Algorithms for using a DEM for mapping catchment areas of stream sediment samples. Comput. Geosci. 2002, 28, 1051–1060. [Google Scholar] [CrossRef]
- Massari, C.; Brocca, L.; Barbetta, S.; Papathanasiou, C.; Mimikou, M.; Moramarco, T. Using globally available soil moisture indicators for flood modelling in Mediterranean catchments. Hydrol. Earth Syst. Sci. 2014, 18, 839–853. [Google Scholar] [CrossRef] [Green Version]
- Cho, E.; Choi, M.; Wagner, W. An assessment of remotely sensed surface and root zone soil moisture through active and passive sensors in northeast Asia. Remote Sens. Environ. 2015, 160, 166–179. [Google Scholar] [CrossRef]
- Albergel, C.; Rüdiger, C.; Pellarin, T.; Calvet, J.C.; Fritz, N.; Froissard, F.; Suquia, D.; Petitpa, A.; Piguet, B.; Martin, E. From near-surface to root-zone soil moisture using an exponential filter: An assessment of the method based on in-situ observations and model simulations. Hydrol. Earth Syst. Sci. 2008, 12, 1323–1337. [Google Scholar] [CrossRef]
- Sánchez-Ruiz, S.; Piles, M.; Sánchez, N.; Martínez-Fernández, J.; Vall-llossera, M.; Camps, A. Combining SMOS with visible and near/shortwave/thermal infrared satellite data for high resolution soil moisture estimates. J. Hydrol. 2014, 516, 273–283. [Google Scholar] [CrossRef]
- Peng, J.; Niesel, J.; Loew, A.; Zhang, S.; Wang, J. Evaluation of satellite and reanalysis soil moisture products over Southwest China using ground-based measurements. Remote Sens. 2015, 7, 15729–15747. [Google Scholar] [CrossRef]
- Pauwels, V.R.; Hoeben, R.; Verhoest, N.E.; De Troch, F.P. The importance of the spatial patterns of remotely sensed soil moisture in the improvement of discharge predictions for small-scale basins through data assimilation. J. Hydrol. 2001, 251, 88–102. [Google Scholar] [CrossRef]
- Kim, H.; Parinussa, R.; Konings, A.G.; Wagner, W.; Cosh, M.H.; Lakshmi, V.; Zohaib, M.; Choi, M. Global-scale assessment and combination of SMAP with ASCAT (active) and AMSR2 (passive) soil moisture products. Remote Sens. Environ. 2017, 204, 260–275. [Google Scholar] [CrossRef]
- Parinussa, R.; Meesters, A.G.; Liu, Y.Y.; Dorigo, W.; Wagner, W.; De Jeu, R.A.M. Error estimates for near-real-time satellite soil moisture as derived from the land parameter retrieval model. IEEE Geosci. Remote Sens. Lett. 2011, 8, 770–783. [Google Scholar] [CrossRef]
- Brocca, L.; Hasenauer, S.; Lacava, T.; Melone, F.; Moramarco, T.; Wagner, W.; Dorigo, W.; Matgen, P.; Martínez-Fernández, J.; Llorens, P.; et al. Soil moisture estimation through ASCAT and AMSR-E sensors: An intercomparison and validation study across Europe. Remote Sens. Environ. 2011, 115, 3390–3408. [Google Scholar] [CrossRef]
- Shellito, P.J.; Small, E.E.; Colliander, A.; Bindlish, R.; Cosh, M.H.; Berg, A.A.; Bosch, D.D.; Caldwell, T.G.; Goodrich, D.C.; McNairn, H. SMAP soil moisture drying more rapid than observed in situ following rainfall events. Geophys. Res. Lett. 2016, 43, 8068–8075. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellites | ASCAT-A | ASCAT-B | SMAP | SMOS |
|---|---|---|---|---|
| Period | 2010.1–2016.12 | 2013.5–2016.12 | 2015.4–2016.12 | 2010.6–2016.12 |
| Parameters | Unit | Prior Ranges | Description | Optimized Values |
|---|---|---|---|---|
| K | - | 0.5–1 | The ratio of potential evapotranspiration to pan evapotranspiration | 0.52 |
| IMP | - | 0–0.3 | The fraction of the impervious area of the catchment | 0.01 |
| B | - | 0–0.5 | A parameter relating to the distribution of tension water capacity | 0.40 |
| WM | mm | 100–700 | Areal mean free water storage capacity | 272.32 |
| WUM | mm | 30–100 | Upper layer water storage capacity | 10.01 |
| WLM | mm | 10–90 | Lower layer water storage capacity | 62.29 |
| C | - | 0.08–0.3 | A factor of remaining potential evaporation in the deepest layer | 0.24 |
| SM | mm | 10–50 | Areal mean free water storage capacity | 34.76 |
| EX | - | 0.5–2 | A parameter relating to the distribution of free water storage capacity | 0.99 |
| KG | - | 0–0.45 | A coefficient relating to a contribution to groundwater storage | 0.08 |
| KI | - | 0–0.35 | A coefficient relating a contribution to interflow storage | 0.13 |
| KKG | - | 0–1 | The groundwater reservoir constant | 0.99 |
| KKI | - | 0–0.9 | The interflow reservoir constant | 0.86 |
| Parameters | Unit | Prior Ranges | Description | Optimized Values |
|---|---|---|---|---|
| S0 | mm | 5–100 | Minimum water storage capacity | 96.35 |
| SM | mm | 5–500 | Range of water storage capacity across the catchment | 498.49 |
| Ts | h | 2–200 | Time constant, reflecting the characteristic of groundwater | 112.89 |
| Tp | h | 2–200 | Time constant, reflecting the characteristic of surface flow | 27.70 |
| a | - | 0–1 | Empirical parameter, reflecting the characteristic of ground outflow | 0.10 |
| b | - | 0–1 | Empirical parameter, reflecting the relationship between Smc and corresponding topographic index | 0.98 |
| c0 | - | 0–1 | A grid channel parameter of the Muskingum method | 0.98 |
| c1 | - | 0–1 | A grid channel parameter of the Muskingum method | 0.01 |
| - | 0–1 | River networks routing parameters of Muskingum method | 0.09 | |
| c1 | - | 0–1 | River networks routing parameters of Muskingum method | 0.46 |
| Satellites | Whole | Dormant | Growing | Whole | Dormant | Growing |
|---|---|---|---|---|---|---|
| R(,ωXAJ)/R(,ωXAJ) | RMSD(,ωXAJ)/RMSD(,ωXAJ) | |||||
| ASCAT_A | 0.60/0.82 | 0.45/0.77 | 0.34/0.63 | 0.24/0.19 | 0.23/0.16 | 0.25/0.22 |
| ASCAT_B | 0.59/0.83 | 0.47/0.81 | 0.36/0.73 | 0.24/0.16 | 0.23/0.16 | 0.25/0.17 |
| SMAP | 0.35/0.45 | 0.47/0.60 | 0.26/0.32 | 0.31/0.30 | 0.25/0.23 | 0.37/0.36 |
| SMOS | −0.11/−0.32 | −0.12/−0.28 | (0.01)/−0.19 | 0.44/0.43 | 0.29/0.30 | 0.54/0.51 |
| R(,ωDDRM)/R(,ωDDRM) | RMSD(,ωDDRM)/RMSD(,ωDDRM) | |||||
| ASCAT_A | 0.67/0.85 | 0.51/0.82 | 0.49/0.65 | 0.21/0.15 | 0.23/0.14 | 0.19/0.17 |
| ASCAT_B | 0.68/0.87 | 0.55/0.87 | 0.52/0.74 | 0.22/0.16 | 0.24/0.18 | 0.18/0.14 |
| SMAP | 0.40/0.46 | 0.52/0.63 | 0.38/0.36 | 0.27/0.27 | 0.24/0.23 | 0.31/0.32 |
| SMOS | −0.12/−0.34 | −0.12/−0.29 | (−0.02)/−0.26 | 0.40/0.39 | 0.28/0.30 | 0.48/0.45 |
| Satellite | Period | R(,ωDDRM)/N | R(,ωDDRM)/N | ||||
|---|---|---|---|---|---|---|---|
| Highest | Mean | Lowest | Highest | Mean | Lowest | ||
| ASCAT-A | Whole | 0.71/1912 | 0.61/1913 | 0.39/1887 | 0.88/1913 | 0.81/1913 | 0.67/1885 |
| Dormant | 0.62/1112 | 0.45/1105 | 0.27/1106 | 0.89/1110 | 0.79/1105 | 0.65/1105 | |
| Growing | 0.57/802 | 0.43/802 | 0.31/802 | 0.71/802 | 0.61/802 | 0.36/802 | |
| ASCAT-B | Whole | 0.75/1006 | 0.60/1007 | 0.41/990 | 0.89/1007 | 0.83/1007 | 0.68/990 |
| Dormant | 0.65/542 | 0.48/549 | 0.28/547 | 0.93/544 | 0.83/549 | 0.66/549 | |
| Growing | 0.55/459 | 0.45/459 | 0.34/459 | 0.89/459 | 0.83/459 | 0.68/459 | |
| SMAP | Whole | 0.66/305 | 0.33/305 | −0.35/303 | 0.87/305 | 0.38/305 | −0.48/303 |
| Dormant | 0.73/162 | 0.35/160 | −0.30/160 | 0.96/162 | 0.42/160 | −0.63/160 | |
| Growing | 0.64/145 | 0.34/143 | −0.28/138 | 0.76/144 | 0.37/143 | −0.32/138 | |
| SMOS | Whole | 0.36/280 | (0.08)/358 | (−0.12)/434 | 0.54/281 | (0.13)/348 | −0.27/445 |
| Dormant | 0.34/114 | (0.06)/150 | −0.24/226 | 0.56/114 | (0.13)/151 | −0.28/223 | |
| Growing | 0.30/119 | (0.06)/147 | −0.25/215 | 0.40/119 | (0.07)/148 | −0.36/215 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, L.; Yang, H.; Zeng, L.; Xu, C.-Y. Evaluating Consistency between the Remotely Sensed Soil Moisture and the Hydrological Model-Simulated Soil Moisture in the Qujiang Catchment of China. Water 2018, 10, 291. https://doi.org/10.3390/w10030291
Xiong L, Yang H, Zeng L, Xu C-Y. Evaluating Consistency between the Remotely Sensed Soil Moisture and the Hydrological Model-Simulated Soil Moisture in the Qujiang Catchment of China. Water. 2018; 10(3):291. https://doi.org/10.3390/w10030291
Chicago/Turabian StyleXiong, Lihua, Han Yang, Ling Zeng, and Chong-Yu Xu. 2018. "Evaluating Consistency between the Remotely Sensed Soil Moisture and the Hydrological Model-Simulated Soil Moisture in the Qujiang Catchment of China" Water 10, no. 3: 291. https://doi.org/10.3390/w10030291