Real-Time Flood Control by Tree-Based Model Predictive Control Including Forecast Uncertainty: A Case Study Reservoir in Turkey


Abstract
:1. Introduction
2. Materials and Methods
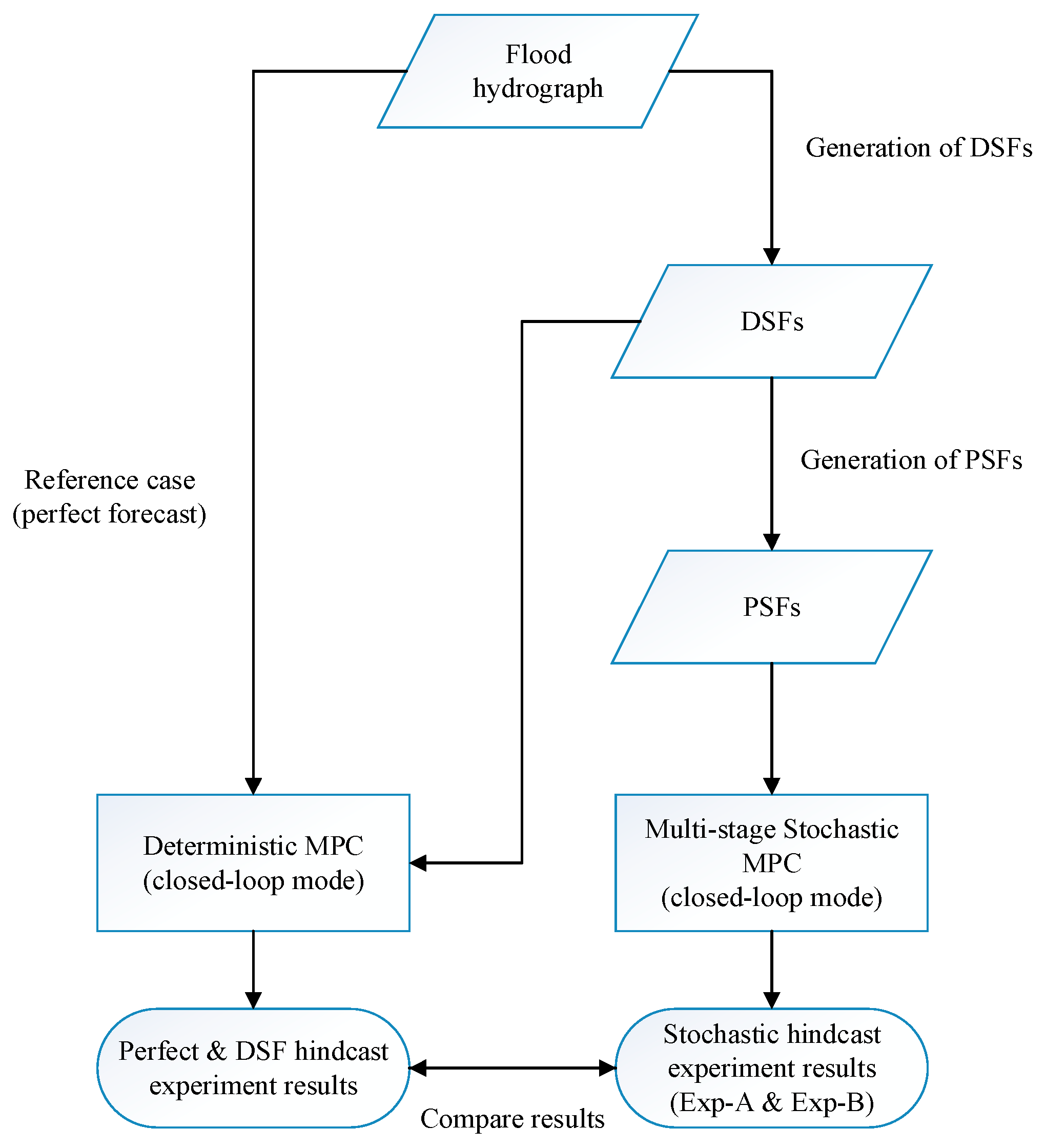
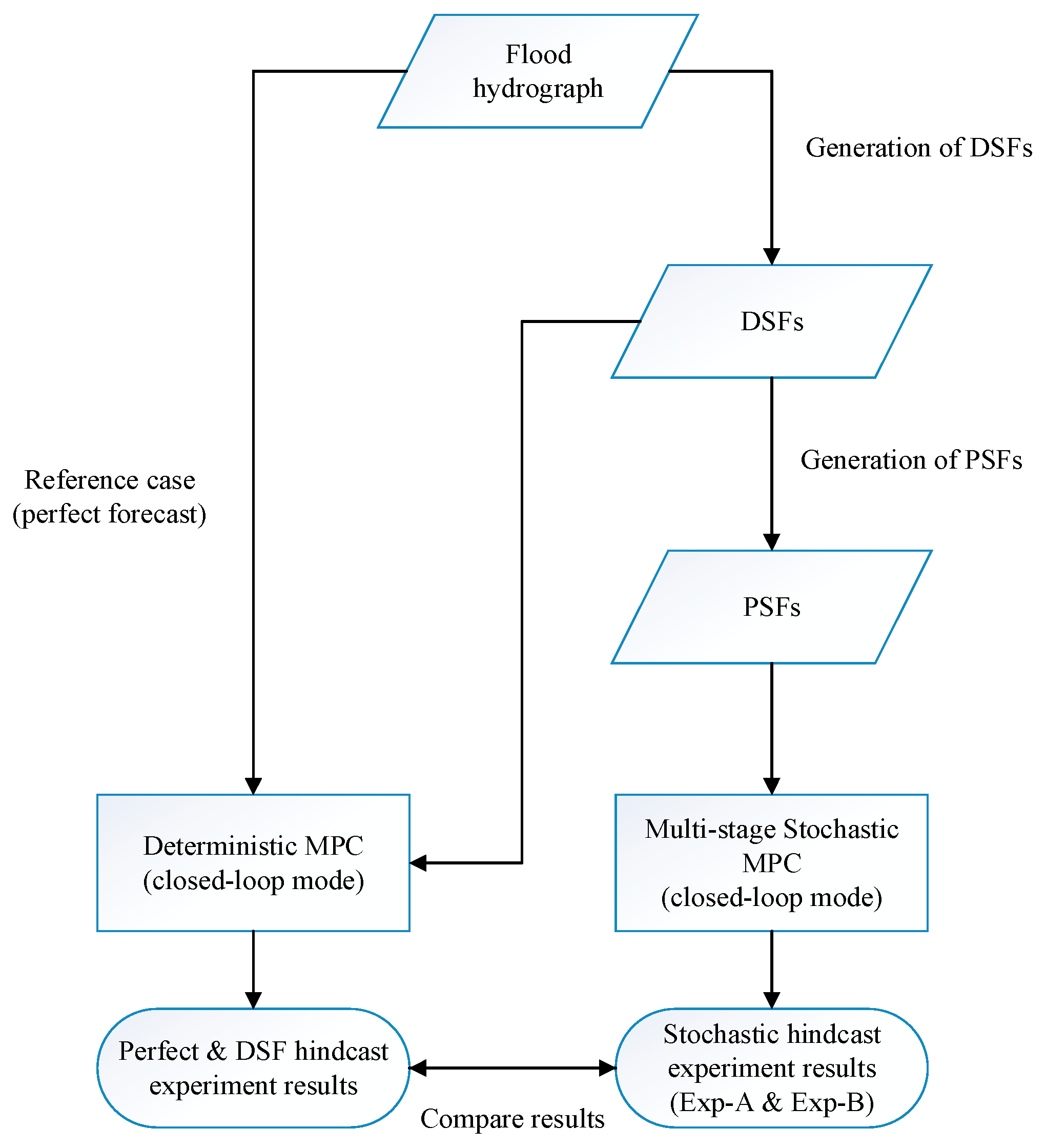
- Perfect Hindcast Experiments: The flood hydrograph corresponding to a 100 years return period (Q100) of the basin is utilized as perfect forecast data in deterministic MPC. This represents the best solution since it exhibits the optimized releases and forebay elevations under perfect knowledge of the future inflows, and it is evaluated as reference case for comparative analyses with forecast based models.
- Deterministic Hindcast Experiments: This represents the skill of single value DSF evaluation by deterministic MPC. Randomly perturbed inflows in each receding horizon are employed in deterministic MPC mode. The random perturbation having a forecast horizon up to 48 h is updated in each hour.
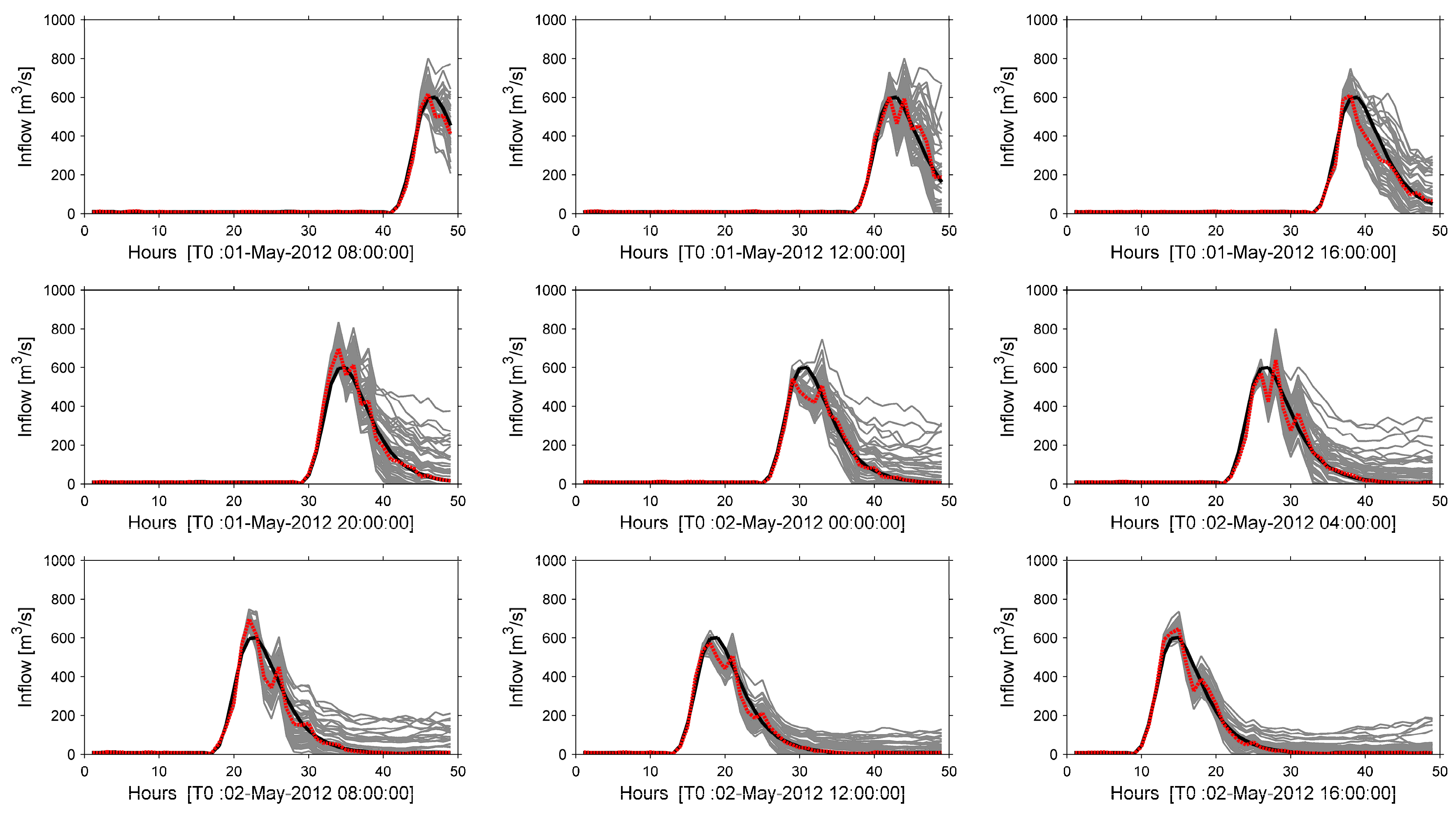
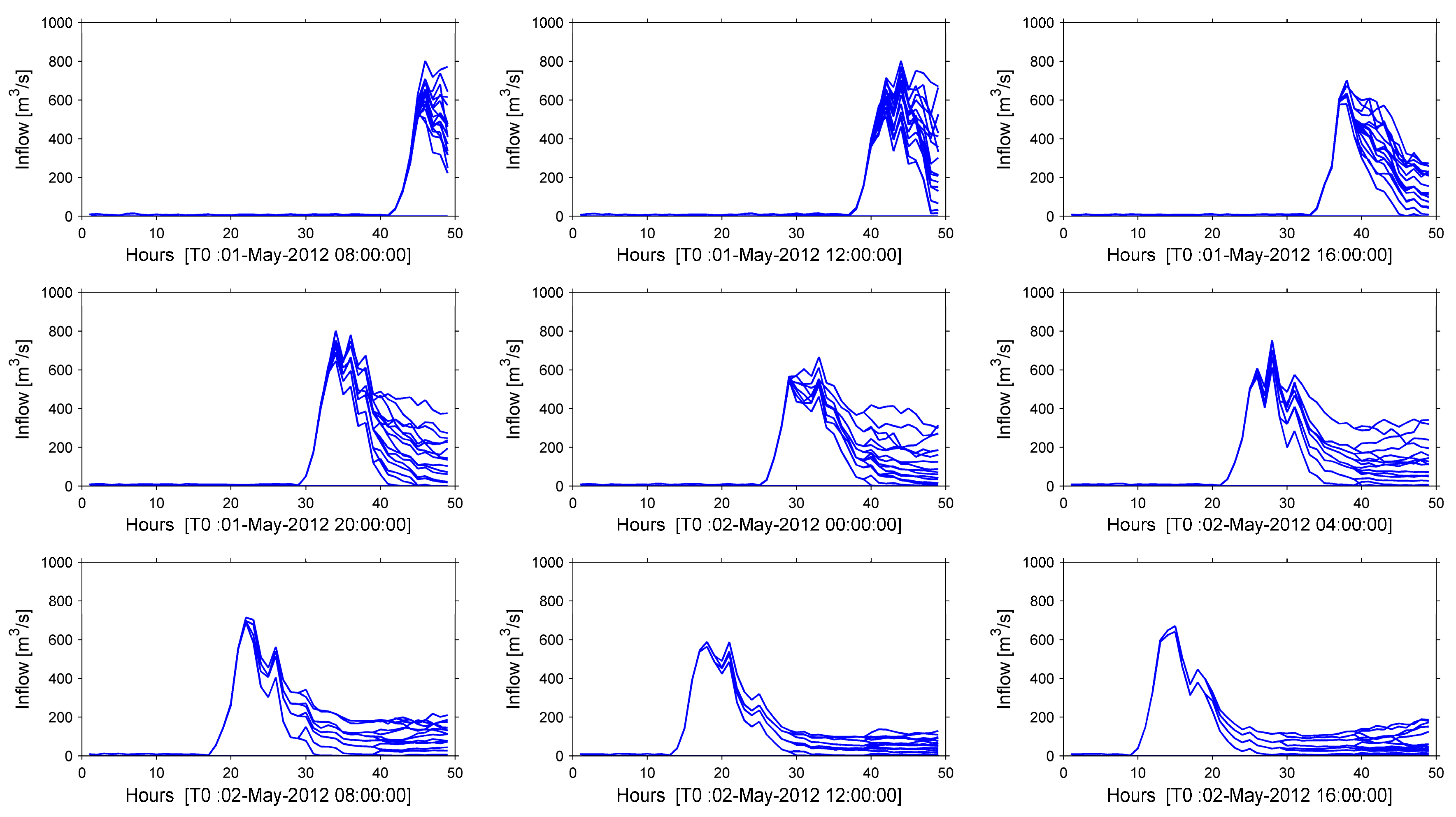
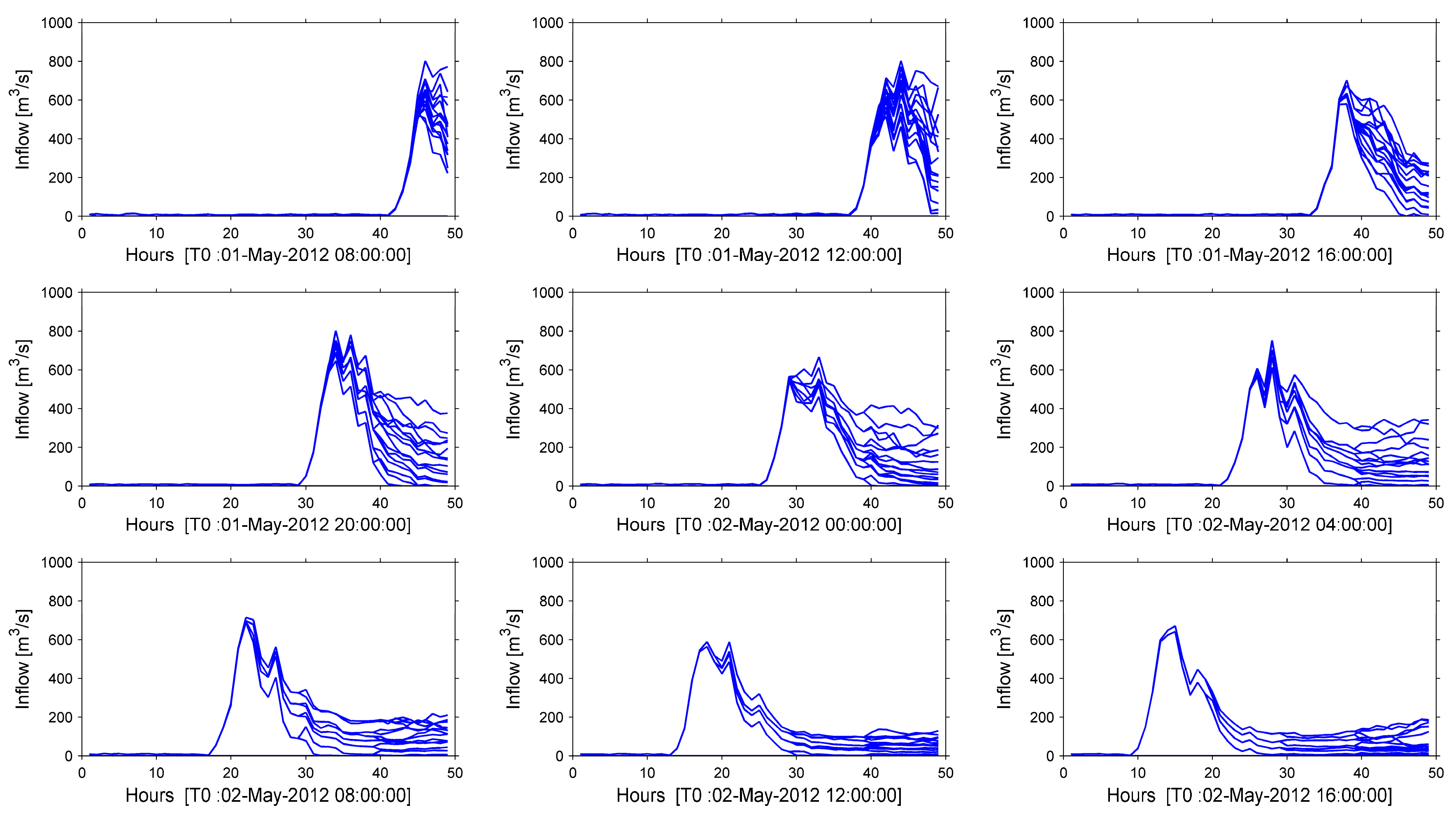
- Probabilistic Hindcast Experiments: This represents the skill of ensemble PSF evaluation by multi-stage stochastic TB-MPC. Synthetically generated ensemble inflows in each receding horizon are employed in stochastic MPC mode (Exp-A). This provides forecast uncertainty consideration in the application. Moreover, features of TB-MPC are investigated with selection of different forecast horizons, tree branching numbers, and different inflow conditions (Exp-B).
2.1. Deterministic and Probabilistic Synthetic Streamflow Generation
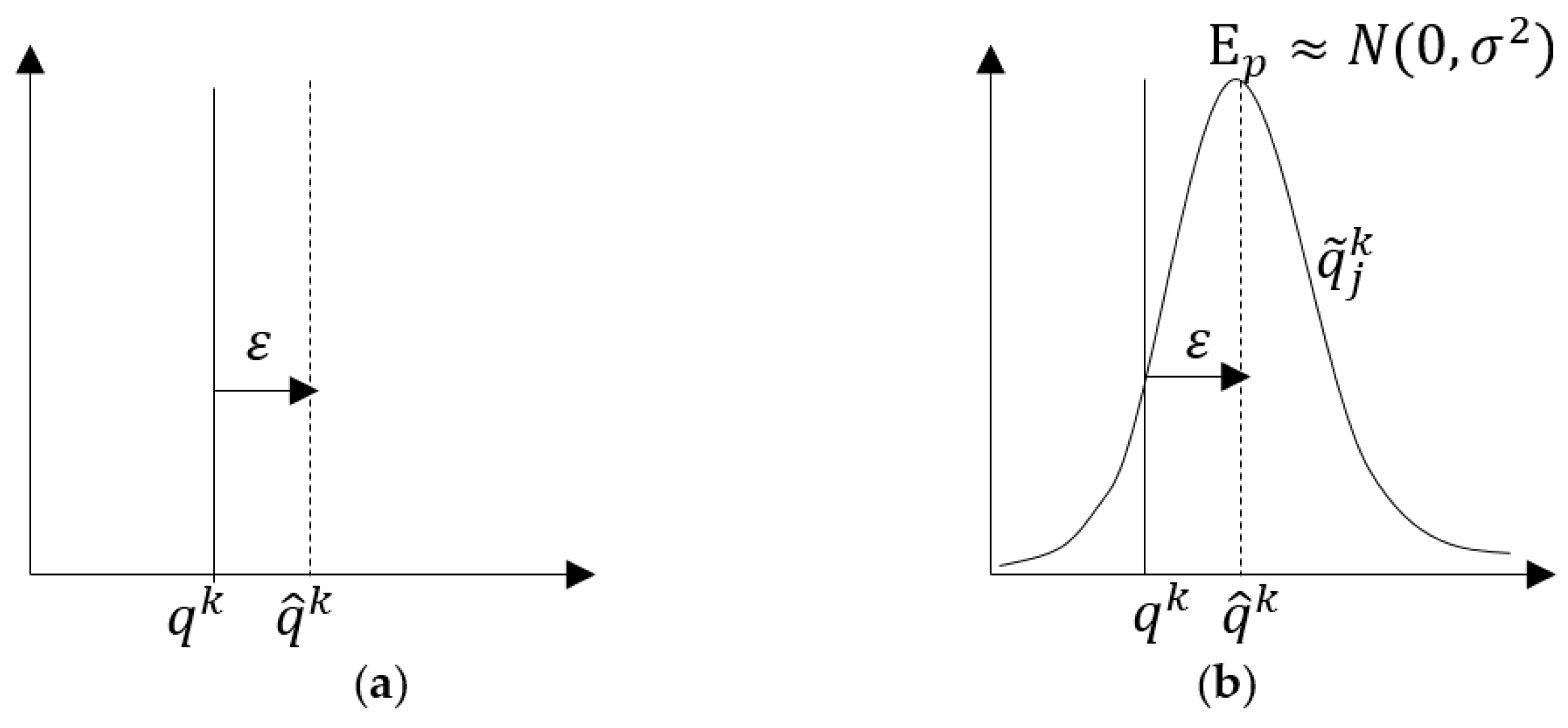
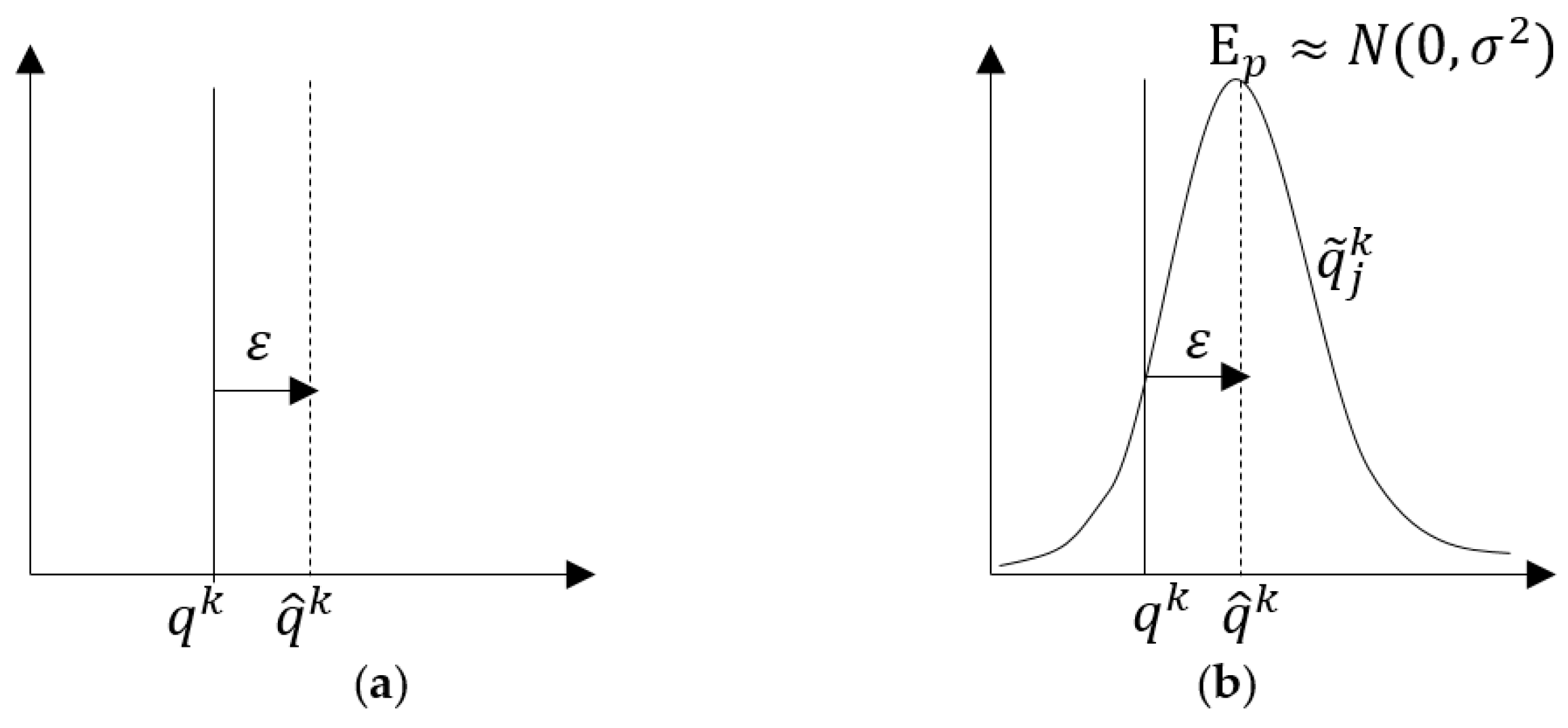
- In the initial time step, PSF () members are generated as:
- The PSF should be correlated with previous members, therefore, the differences between successive DSF values (referred to time instants for the same DSF sequence) are calculated, then normally distributed errors having mean and standard error from the previous time step are generated and added to the differences. Maximum function is added in order to eliminate negative values, and the remaining PSF members () are formulated as:
2.2. Deterministic Model Predictive Control (MPC)
2.3. Multi-Stage Stochastic Tree-Based MPC (TB-MPC)
3. A Real World Test Case and Model Set-Up
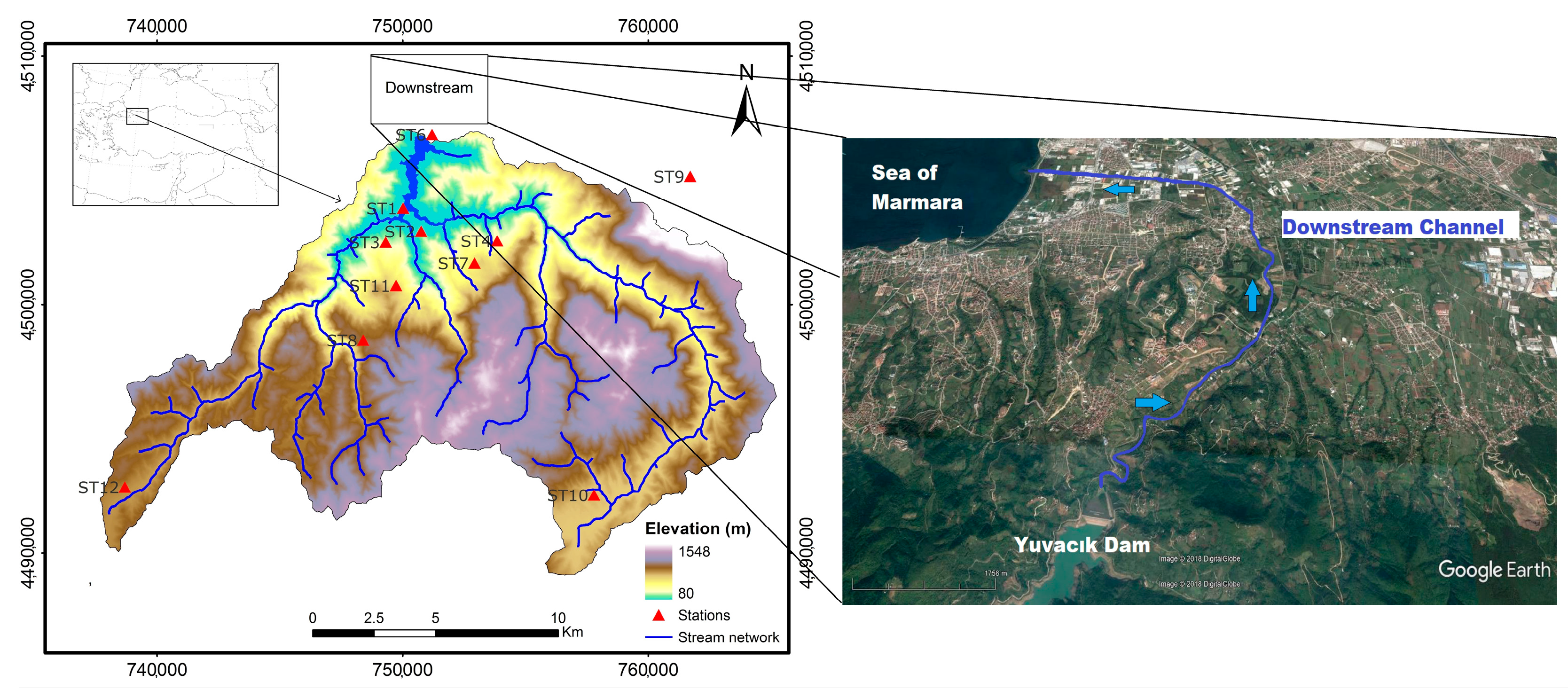
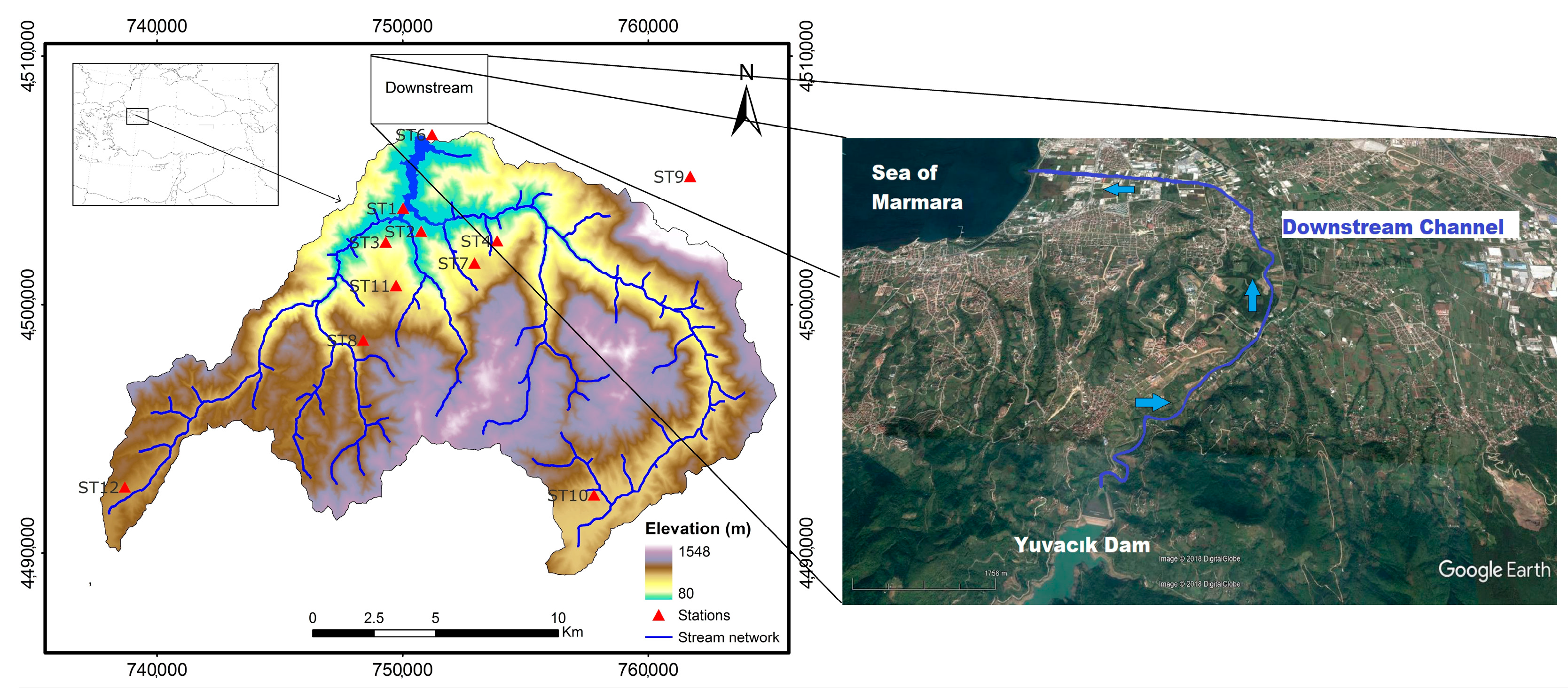
3.1. Study Area
3.2. MPC Inputs
- Forebay elevation at the end of a flood event: Forebay elevation should be same at the end of a flood event in order to provide long term water supply targets,
- Flooding threshold value: Spillway discharges should be less than channel capacity, thus this is considered as the flooding threshold value and the maximum discharge at the dam outlet is checked,
- Total flood volume at the downstream area: The cumulative volume of the released flood water (only above the maximum flood limit of 200 m3/s) should be zero for the best flood management,
- Flood storage index (FSI): It is essential to have enough flood pool in the reservoir to attenuate the hourly extremes. To measure this, FSI is defined by the ratio of the total effective flood storage over the total volume of storage corresponding to Flood Control Levels (FCLs) [4] as shown in Equations (14) and (15) . The reservoir level should be kept at FCL as suggested to reserve space for flood attenuation. FSI ranges between zero and one. While zero indicates the reservoir level is always kept above FCL, one indicates operation is totally based on FCL. Higher FSI ensures more reliable flood operation (under forecast uncertainty) by having a high empty reservoir volume against flood risk.
3.3. Model Set-Up
3.4. Physical and Operational Constraints
3.5. Objective Function
- Differences between optimized forebay elevation and maximum operating elevation are minimized in Equation (22),
- Spillway discharges are minimized in Equation (23),
- Spillway releases above a specified discharge (200 m3/s) are constrained in Equation (24). This has a high weight in order to prevent damage in the downstream,
- The case of a set point for forebay elevation is given i.e., a variable guide curve (it is the same for each hour in a day) for long term targets [39], this term stands to minimize deviations from it in Equation (25),
- Spillway discharges between two consecutive time steps are constrained by consideration of the mechanical gate operation efficiency (against wear and tear) in Equation (26).
4. Numerical Experiments and Results
4.1. Deterministic MPC Hindcasts Using Perfect Forecasts
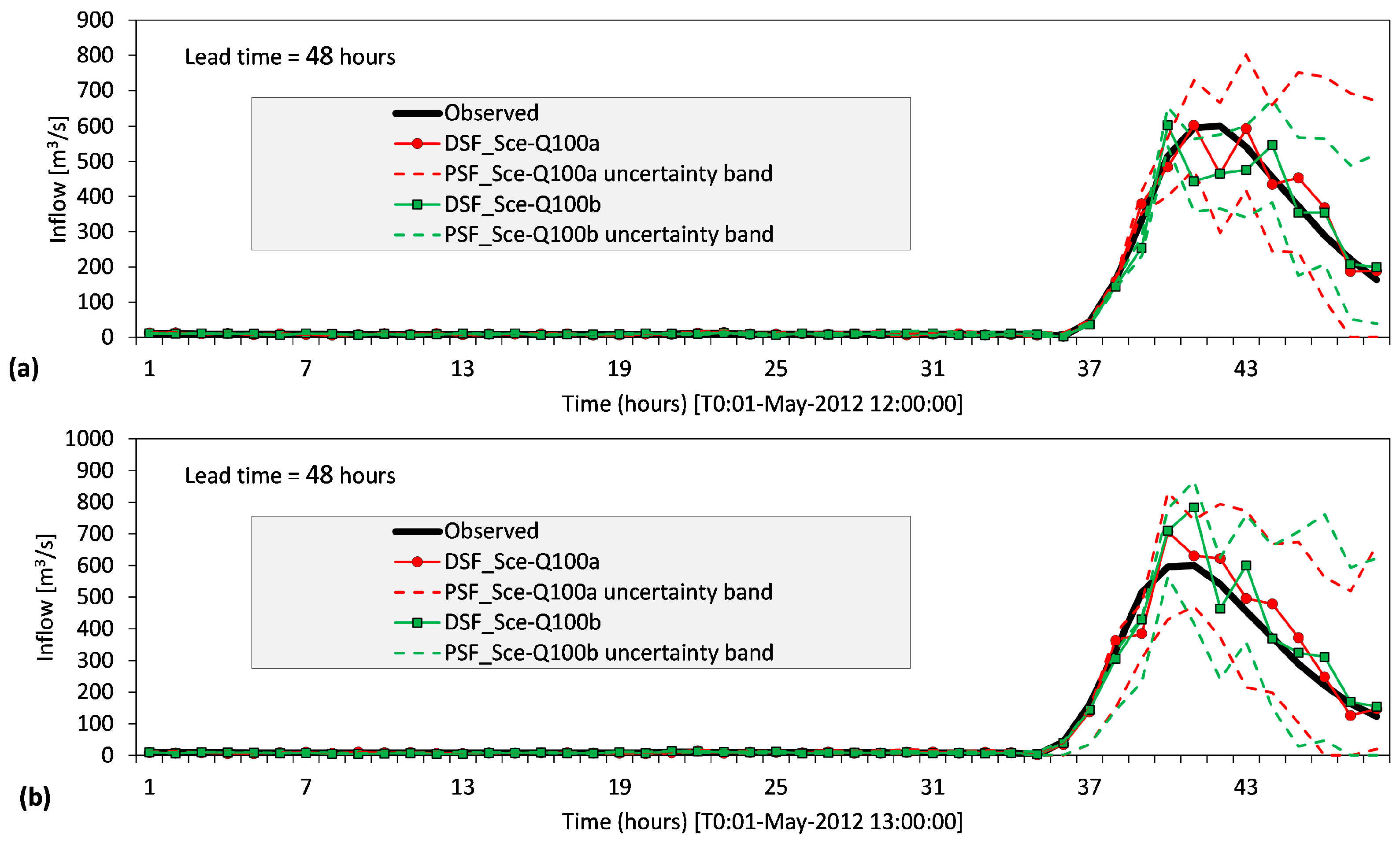
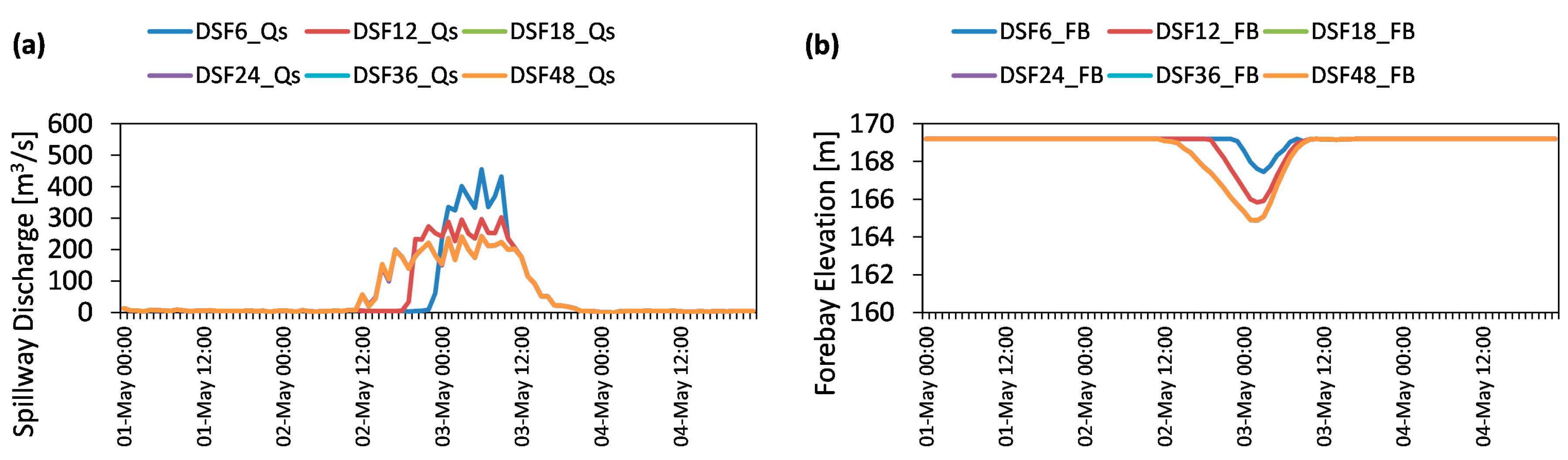
4.2. Deterministic MPC Hindcasts Using DSFs
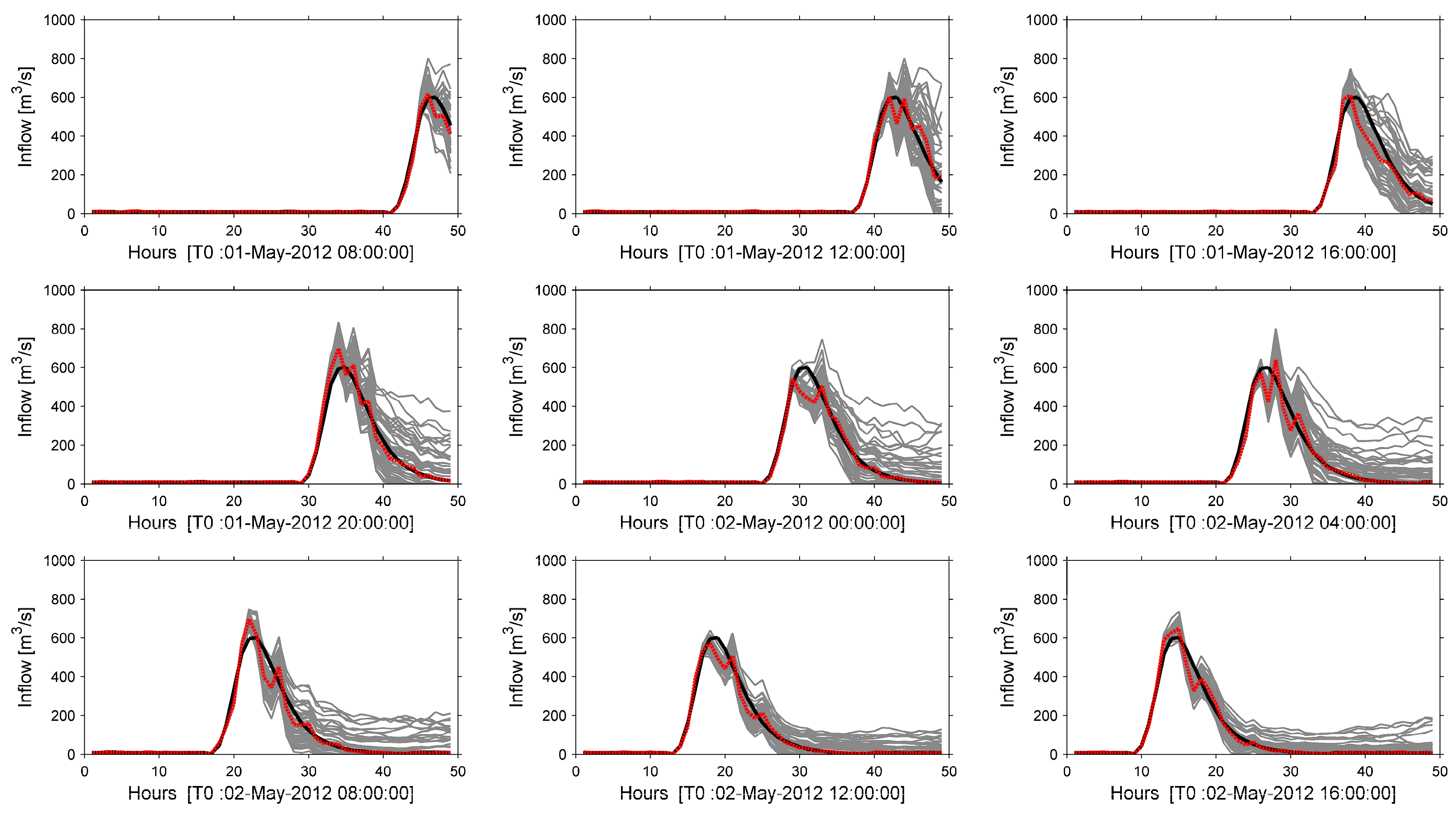
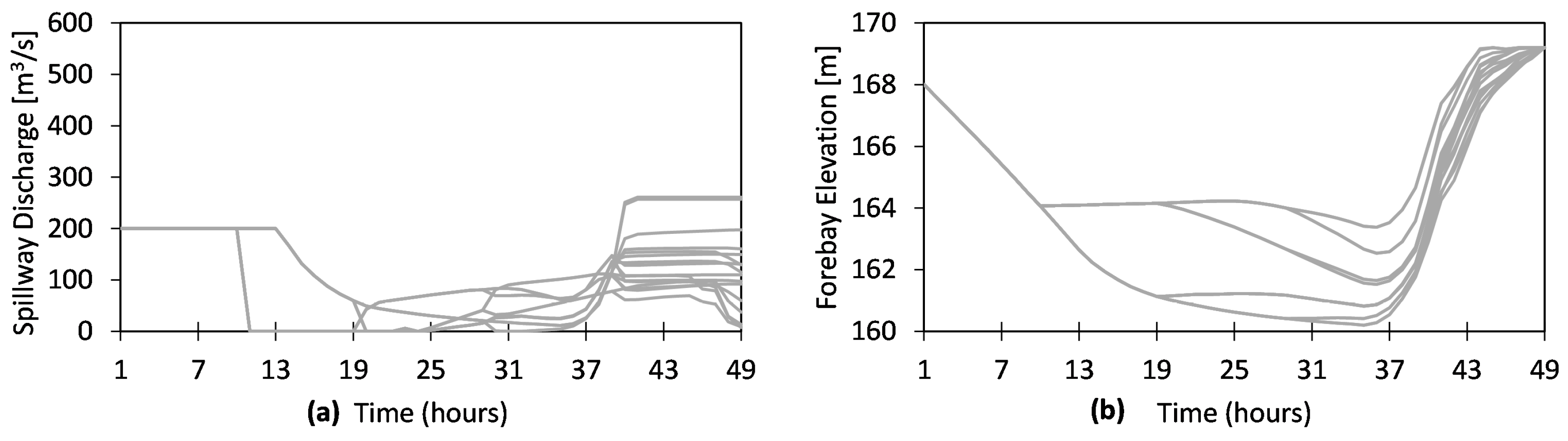
4.3. Multi-Stage Stochastic TB-MPC Hindcasts Using PSFs
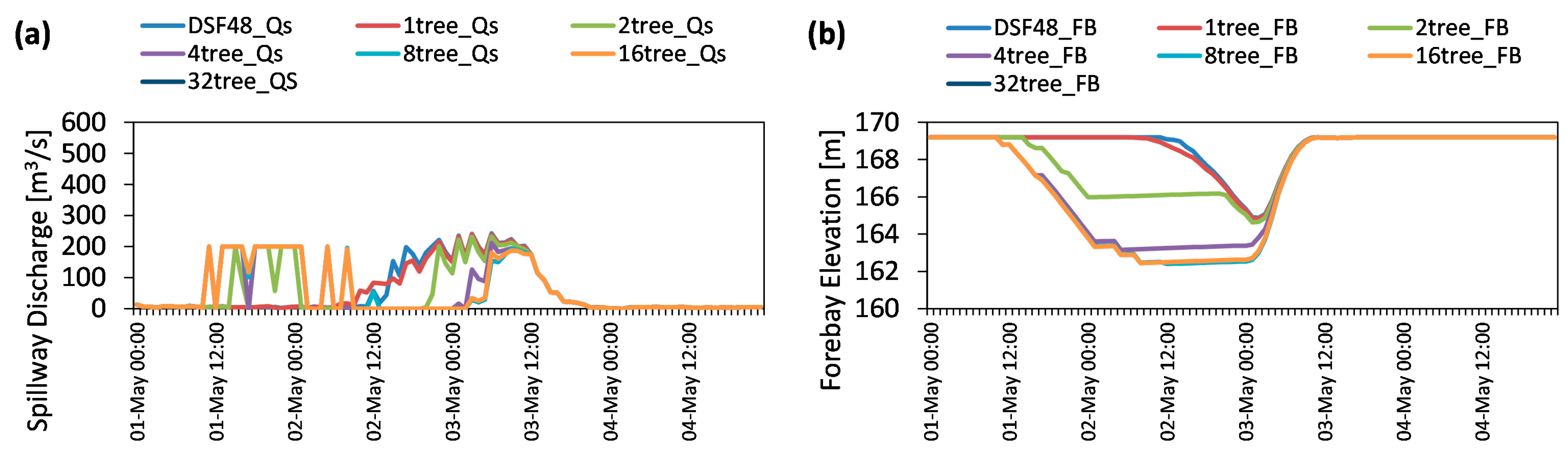
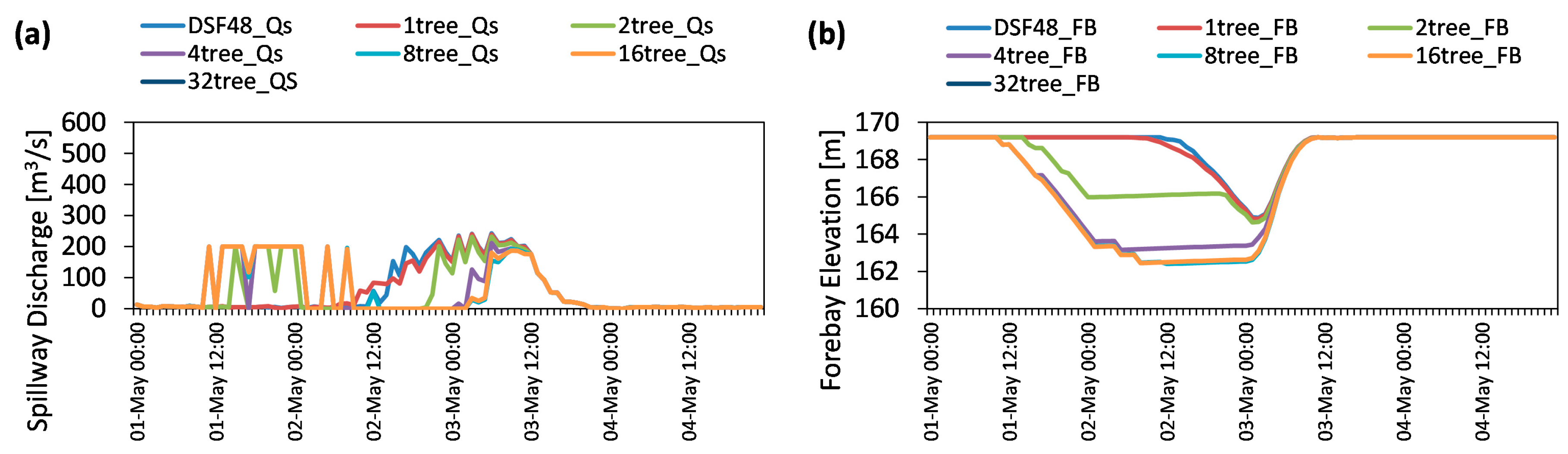
4.3.1. TB-MPC Hindcasts Considering a Different Number of Tree Branches
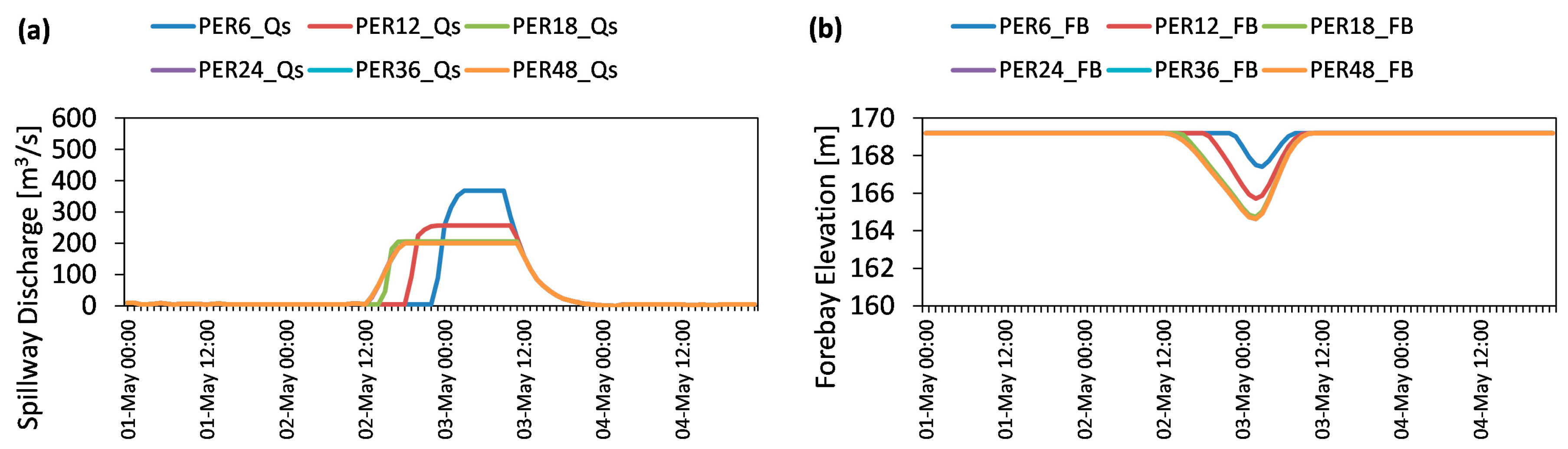
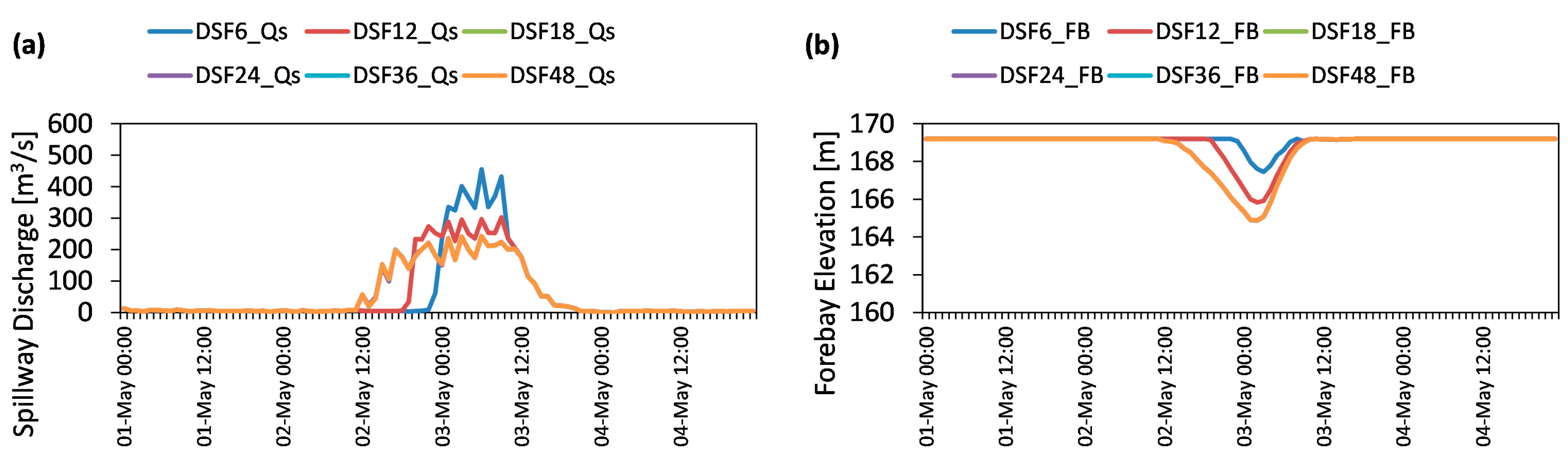
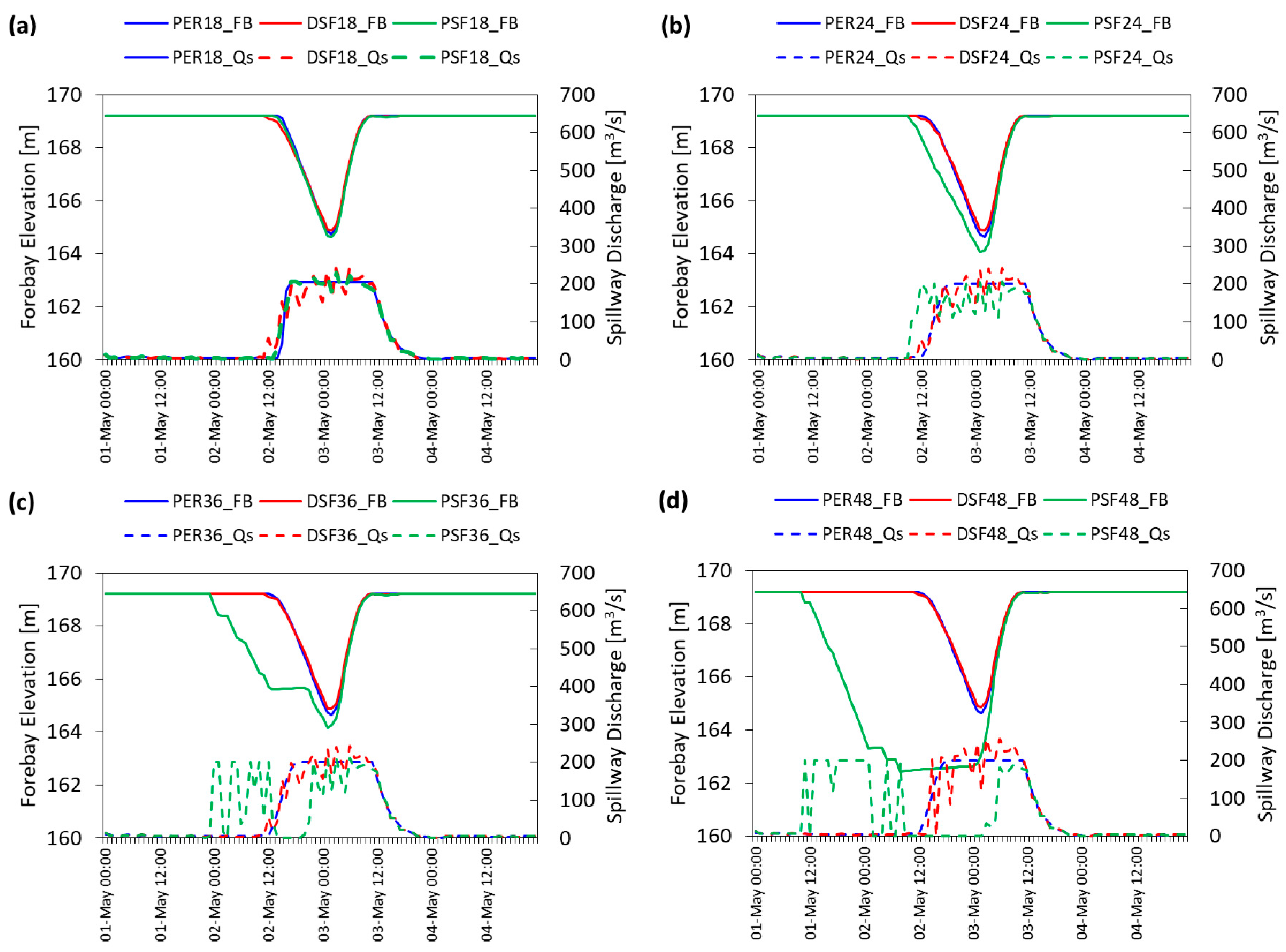
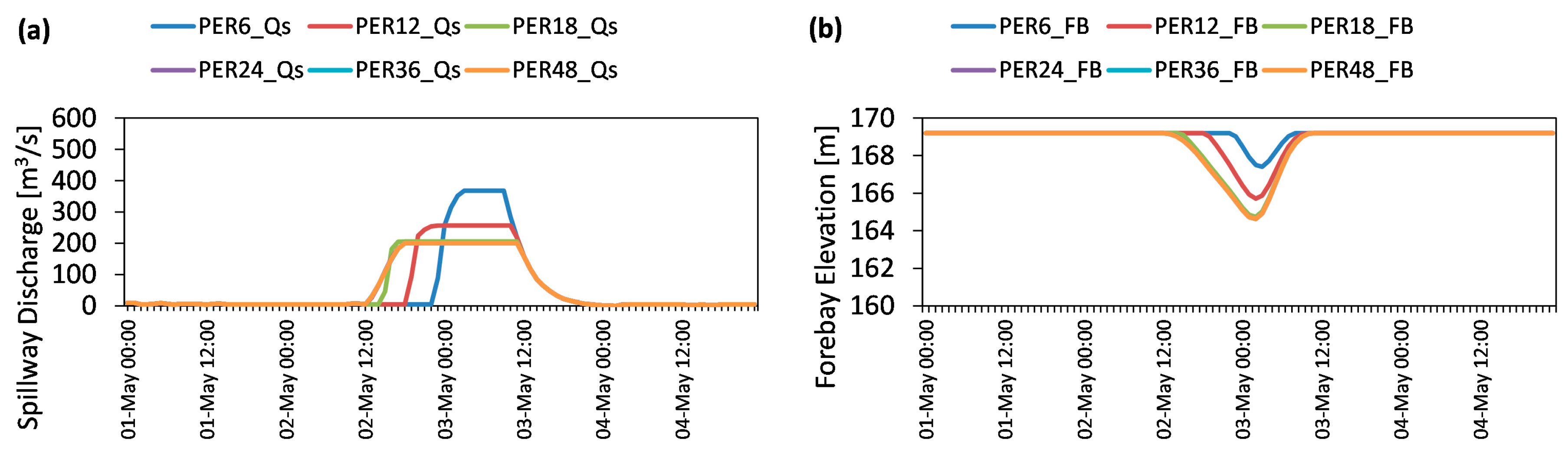
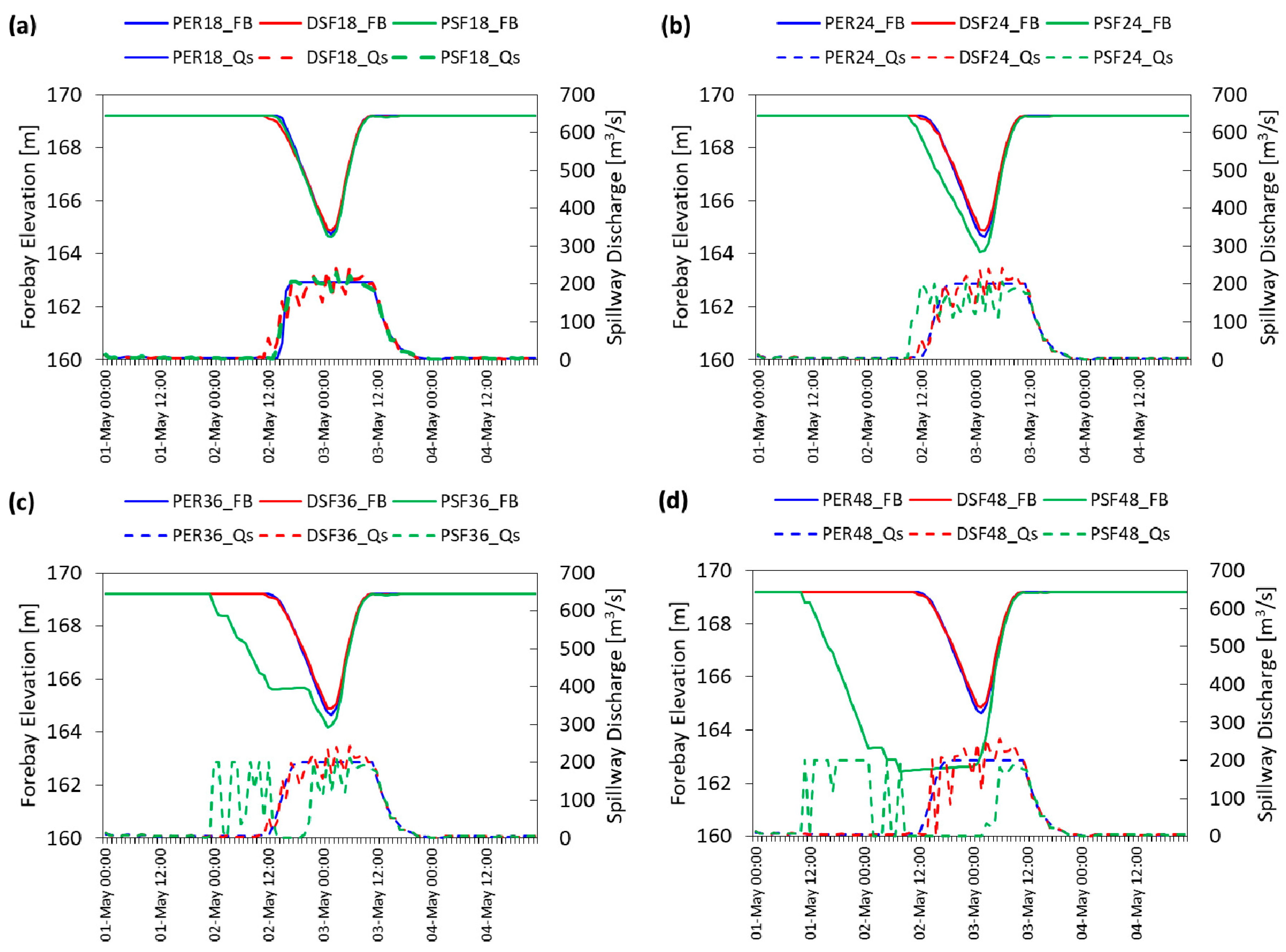
4.3.2. TB-MPC Hindcasts Considering Different Forecast Horizons
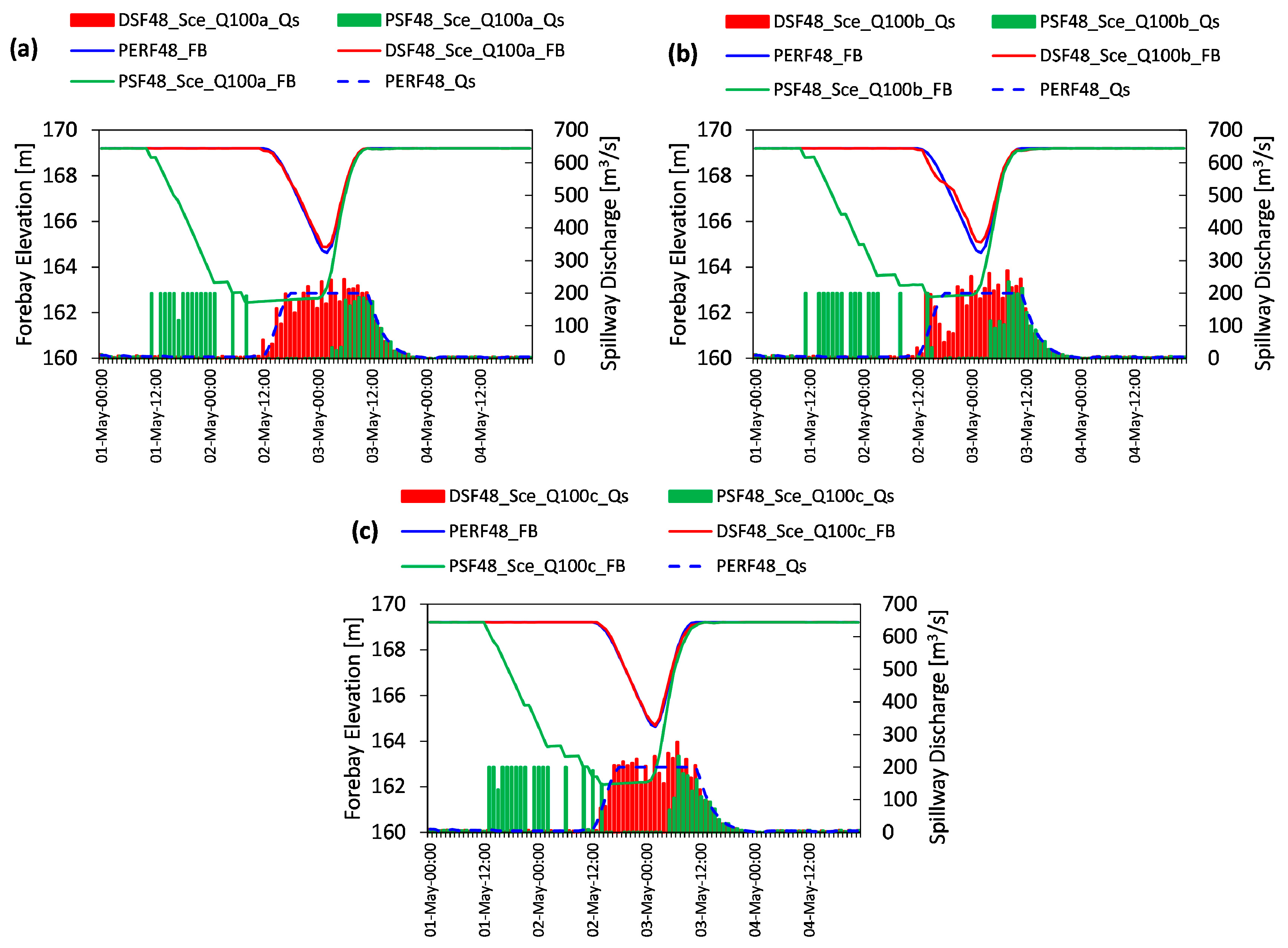
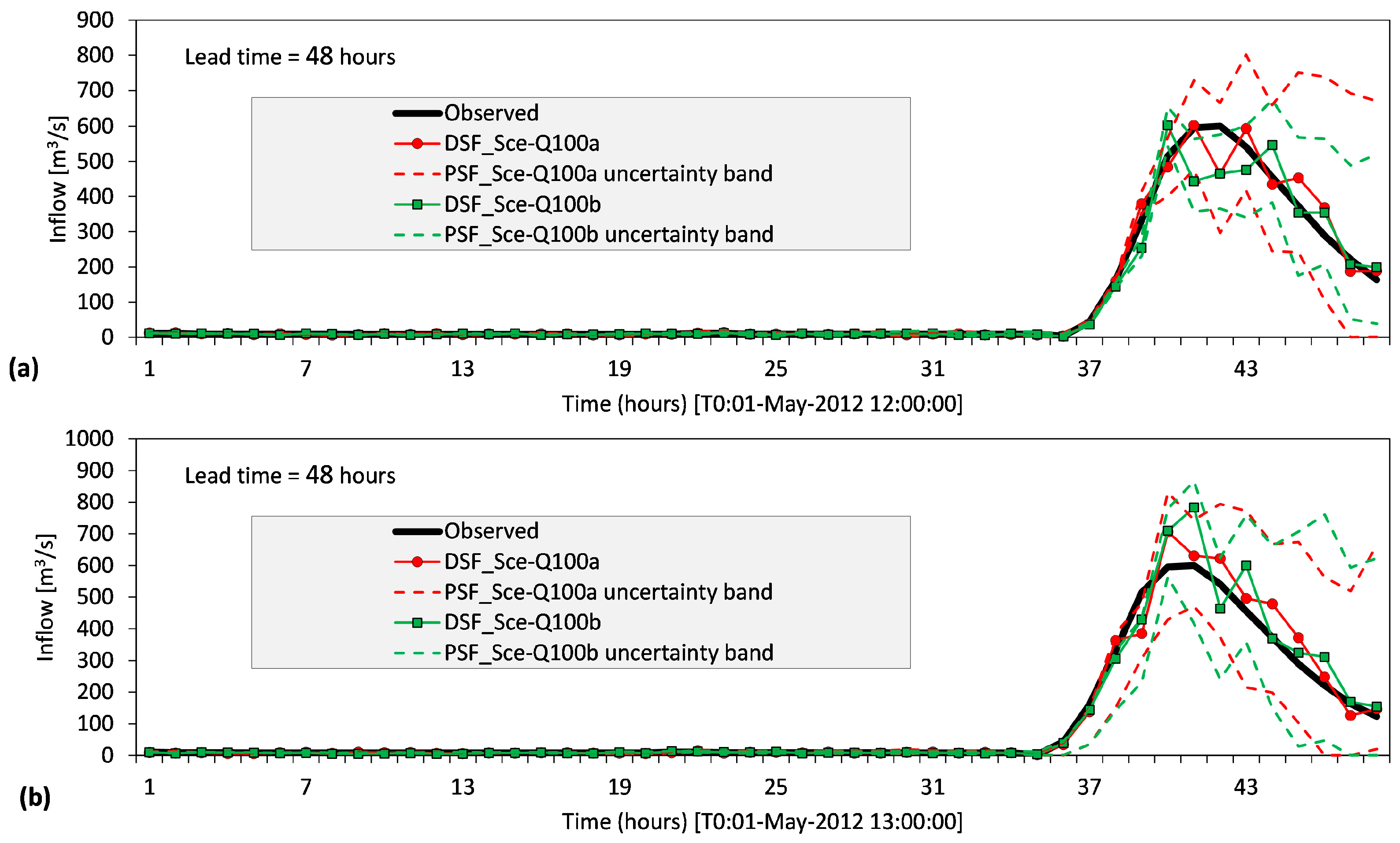
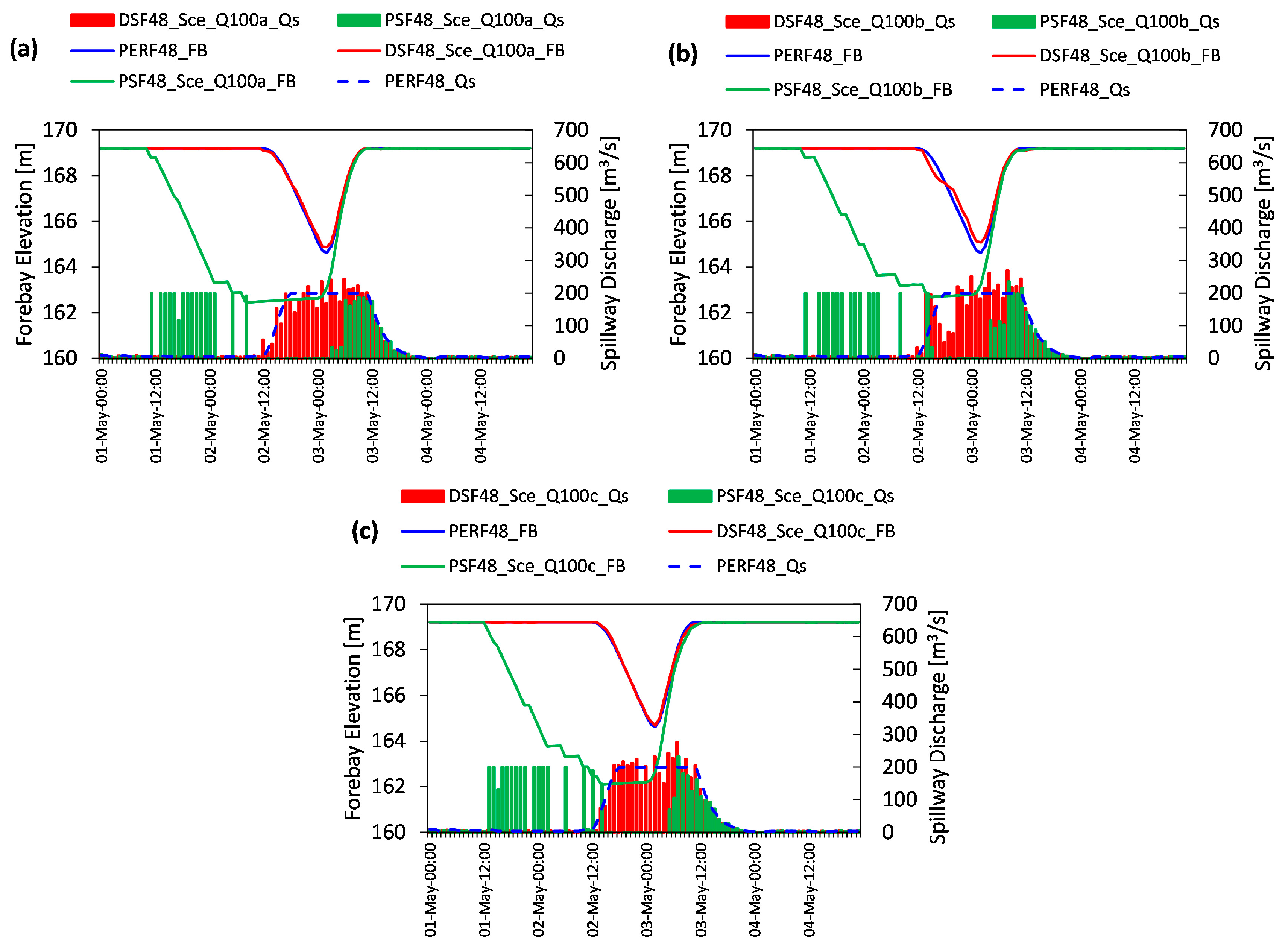
4.3.3. Assessment of the Approach for Different Inflow Conditions and Scenarios
5. Conclusions and Outlook
- Forecast uncertainty is indispensable especially for flood management. It is critical for those cases in which wrong or poor decisions may result with loss of life and property. At this point, considering uncertainty provides better management in terms of flood metrics without discarding water supply purposes.
- Independent closed-loop hindcasting experiment scenarios demonstrate the robustness of the system developed against biased information (disturbances).
- Probabilistic data represent forecast uncertainty in comparison to deterministic equivalents. In this study, a new synthetic streamflow generation method is proposed to represent forecast uncertainty for reservoir optimization.
- The synthetic PSF generation model that considers the dynamic evolution of uncertainties is valuable if hydrological model outputs driven by a rainfall and temperature forecast ensemble are not available. This method is very advantageous from the operational standpoint, since it does not require complex computations and is easy to implement while considering conditional (flow dependent) increasing uncertainty through time. It is simple to formulate, comprehend, and easy to repeat.
- Besides the ensemble generation, tree reduction parameters should be carefully investigated in the problem definition phase. In the case of selecting a lower branch and forecast horizon than required, TB-MPC results may converge to deterministic MPC results.
- The system was also tested against different inflow conditions which have greater flood value than the downstream channel capacity. According to the results, the method provides reliable results against different high flood conditions in the hindcasting experiments.
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ahmad, S.; Simonovic, S.P. System dynamics modeling of reservoir operations for flood management. J. Comput. Civ. Eng. 2000, 14, 190–198. [Google Scholar] [CrossRef]
- Plate, E.J. Flood risk and flood management. J. Hydrol. 2002, 267, 2–11. [Google Scholar] [CrossRef]
- Wei, C.C.; Hsu, N.S. Optimal tree-based release rules for real-time flood control operations on a multipurpose multireservoir system. J. Hydrol. 2009, 365, 213–224. [Google Scholar] [CrossRef]
- Şensoy, A.; Uysal, G.; Şorman, A.A. Developing a decision support framework for real-time flood management using integrated models. J. Flood Risk Manag. 2016. [Google Scholar] [CrossRef]
- Cheng, W.M.; Huang, C.L.; Hsu, N.S.; Wei, C.C. Risk analysis of reservoir operations considering short-term flood control and long-term water supply: A case study for the Da-Han Creek Basin in Taiwan. Water 2017, 9, 424. [Google Scholar] [CrossRef]
- Oliveira, R.; Loucks, D.P. Operating rules for multireservoir systems. Water Resour. Res. 1997, 33, 839–852. [Google Scholar] [CrossRef]
- Chang, F.J.; Chen, L.; Chang, L.C. Optimizing the reservoir operating rule curves by genetic algorithms. Hydrol. Process. 2005, 19, 2277–2289. [Google Scholar] [CrossRef]
- Liu, P.; Guo, S.; Xu, X.; Chen, J. Derivation of aggregation-based joint operating rule curves for cascade hydropower reservoirs. Water Resour. Manag. 2011, 25, 3177–3200. [Google Scholar] [CrossRef]
- Rani, D.; Moreira, M.M. Simulation–optimization modeling: A survey and potential application in reservoir systems operation. Water Resour. Manag. 2010, 24, 1107–1138. [Google Scholar] [CrossRef]
- Li, X.; Guo, S.; Liu, P.; Chen, G. Dynamic control of flood limited water level for reservoir operation by considering inflow uncertainty. J. Hydrol. 2010, 391, 124–132. [Google Scholar] [CrossRef]
- Wan, W.; Zhao, J.; Lund, J.R.; Zhao, T.; Lei, X.; Wang, H. Optimal hedging rule for reservoir refill. J. Water Resour. Plan. Manag. ASCE 2016, 142, 04016051. [Google Scholar] [CrossRef]
- Bellman, R. The theory of dynamic programming. Bull. Am. Math. Soc. 1954, 60, 503–516. [Google Scholar] [CrossRef]
- Faber, B.A.; Stedinger, J.R. Reservoir optimization using sampling SDP with ensemble streamflow prediction (ESP) forecasts. J. Hydrol. 2001, 249, 113–133. [Google Scholar] [CrossRef]
- Yurtal, R.; Seckin, G.; Ardiclioglu, G. Hydropower optimization for the lower Seyhan system in Turkey using dynamic programming. Water Int. 2005, 30, 522–529. [Google Scholar] [CrossRef]
- Raso, L.; Malaterre, P.O.; Bader, J.C. Effective streamflow process modeling for optimal reservoir operation using stochastic dual dynamic programming. J. Water Resour. Plann. Manage. ASCE 2017, 143, 04017003. [Google Scholar] [CrossRef]
- Labadie, J.W. Optimal operation of multireservoir systems: State-of-the-art review. J. Water Resour. Plan. Manag. ASCE 2004, 130, 93–111. [Google Scholar] [CrossRef]
- Morari, M.; Lee, J.H. Model predictive control: Past, present and future. Comput. Chem. Eng. 1999, 23, 667–682. [Google Scholar] [CrossRef]
- Blanco, T.B.; Willems, P.; Chiang, P.K.; Haverbeke, N.; Berlamont, J.; De Moor, B. Flood regulation using nonlinear model predictive control. Control Eng. Pract. 2010, 18, 1147–1157. [Google Scholar] [CrossRef]
- Van Overloop, P.J.; Horváth, K.; Aydin, B.E. Model predictive control based on an integrator resonance model applied to an open water channel. Control Eng. Pract. 2014, 27, 54–60. [Google Scholar] [CrossRef]
- Horváth, K.; Galvis, E.; Valentín, M.G.; Rodellar, J. New offset-free method for model predictive control of open channels. Control Eng. Pract. 2015, 41, 13–25. [Google Scholar] [CrossRef]
- Zhao, T.; Zhao, J.; Yang, D.; Wang, H. Generalized martingale model of the uncertainty evolution of streamflow forecasts. Adv. Water Resour. 2013, 57, 41–51. [Google Scholar] [CrossRef]
- Chen, J.; Brissette, F.P.; Leconte, R. Uncertainty of downscaling method in quantifying the impact of climate change on hydrology. J. Hydrol. 2011, 401, 190–202. [Google Scholar] [CrossRef]
- Roulin, E.; Vannitsem, S. Post-processing of medium-range probabilistic hydrological forecasting: Impact of forcing, initial conditions and model errors. Hydrol. Process. 2015, 29, 1434–1449. [Google Scholar] [CrossRef]
- Fan, F.M.; Schwanenberg, D.; Alvarado, R.; dos Reis, A.A.; Collischonn, W.; Naumman, S. Performance of deterministic and probabilistic hydrological forecasts for the short-term optimization of a tropical hydropower reservoir. Water Resour. Manag. 2016, 30, 3609–3625. [Google Scholar] [CrossRef]
- Kuczera, G.; Parent, E. Monte Carlo assessment of parameter uncertainty in conceptual catchment models: The Metropolis algorithm. J. Hydrol. 1998, 211, 69–85. [Google Scholar] [CrossRef]
- Montero, R.A.; Schwanenberg, D.; Krahe, P.; Lisniak, D.; Sensoy, A.; Sorman, A.A.; Akkol, B. Moving horizon estimation for assimilating H-SAF remote sensing data into the HBV hydrological model. Adv. Water Resour. 2016, 92, 248–257. [Google Scholar] [CrossRef]
- Yao, H.; Georgakakos, A. Assessment of Folsom Lake response to historical and potential future climate scenarios: 2. Reservoir management. J. Hydrol. 2001, 249, 176–196. [Google Scholar] [CrossRef]
- Zhao, T.; Cai, X.; Yang, D. Effect of streamflow forecast uncertainty on real-time reservoir operation. Adv. Water Resour. 2011, 34, 495–504. [Google Scholar] [CrossRef]
- Liu, Z.; Guo, Y.; Wang, L.; Wang, Q. Streamflow forecast errors and their impacts on forecast-based reservoir flood control. Water Resour. Manag. 2015, 29, 4557–4572. [Google Scholar] [CrossRef]
- Todini, E. Role and treatment of uncertainty in real-time flood forecasting. Hydrol. Process. 2004, 18, 2743–2746. [Google Scholar] [CrossRef]
- Koutsoyiannis, D. The Hurst phenomenon and fractional Gaussian noise made easy. Hydrol. Sci. J. 2002, 47, 573–595. [Google Scholar] [CrossRef]
- Ahmed, J.A.; Sarma, A.K. Artificial neural network model for synthetic streamflow generation. Water Resour. Manag. 2007, 21, 1015. [Google Scholar] [CrossRef]
- Ochoa-Rivera, J.C.; García-Bartual, R.; Andreu, J. Multivariate synthetic streamflow generation using a hybrid model based on artificial neural networks. Hydrol. Earth Syst. Sci. 2002, 6, 641–654. [Google Scholar] [CrossRef]
- Raso, L.; Schwanenberg, D.; van de Giesen, N.C.; van Overloop, P.J. Short-term optimal operation of water systems using ensemble forecasts. Adv. Water Resour. 2014, 71, 200–208. [Google Scholar] [CrossRef]
- Stive, P.M. Performance Assessment of Tree-Based Model Predictive Control. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2011. [Google Scholar]
- Ficchi, A.; Raso, L.; Dorchies, D.; Pianosi, F.; Malaterre, P.O.; van Overloop, P.J.; Jay-Allemand, M. Optimal operation of the multireservoir system in the Seine River Basin using deterministic and ensemble forecasts. J. Water Resour. Plan. Manag. 2015, 142. [Google Scholar] [CrossRef]
- Schwanenberg, D.; Fan, F.M.; Naumann, S.; Kuwajima, J.I.; Montero, R.A.; dos Reis, A.A. Short-term reservoir optimization for flood mitigation under meteorological and hydrological forecast uncertainty. Water Resour. Manag. 2015, 29, 1635–1651. [Google Scholar] [CrossRef]
- Uysal, G.; Şensoy, A.; Şorman, A.A.; Akgün, T.; Gezgin, T. Basin/reservoir system integration for real time reservoir operation. Water Resour. Manag. 2016, 30, 1653–1668. [Google Scholar] [CrossRef]
- Uysal, G.; Schwanenberg, D.; Alvarado-Montero, R.; Şensoy, A. Short term optimal operation of water supply reservoir under flood control stress using model predictive control. Water Resour. Manag. 2018, 32, 583–597. [Google Scholar] [CrossRef]
- Hui, P. Yellow River Group Project, A Subproject of the China-DC WRE Project; Final Research Report of Cluster 2; Delft University of Technology: Delft, The Netherlands, 2002. [Google Scholar]
- Yan, B.; Guo, S.; Chen, L. Estimation of reservoir flood control operation risks with considering inflow forecasting errors. Stoch. Environ. Res. Risk Assess. 2014, 28, 359–368. [Google Scholar] [CrossRef]
- Datta, B.; Burges, S.J. Short-term, single, multiple-purpose reservoir operation: Importance of loss functions and forecast errors. Water Resour. Res. 1984, 20, 1167–1176. [Google Scholar] [CrossRef]
- Pianosi, F.; Raso, L. Dynamic modeling of predictive uncertainty by regression on absolute errors. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Biemans, H.; Hutjes, R.W.A.; Kabat, P.; Strengers, B.J.; Gerten, D.; Rost, S. Effects of precipitation uncertainty on discharge calculations for main river basins. J. Hydrometeorol. 2009, 10, 1011–1025. [Google Scholar] [CrossRef]
- Schwanenberg, D.; Becker, B.P.J.; Xu, M. The open real-time control (RTC)-Tools software framework for modeling RTC in water resources sytems. J. Hydroinform. 2015, 17, 130–148. [Google Scholar] [CrossRef]
- Xu, M.; Schwanenberg, D. Comparison of sequential and simultaneous model predictive control of reservoir systems. In Proceedings of the 10th International Conference on Hydroinformatics, Hamburg, Germany, 14–18 July 2012. [Google Scholar]
- Wächter, A.; Biegler, L.T. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 2006, 106, 25–57. [Google Scholar] [CrossRef]
- Heitsch, H.; Römisch, W. Scenario reduction algorithms in stochastic programming. Comput. Optim. Appl. 2003, 24, 187–206. [Google Scholar] [CrossRef]
- Nadarajah, S.; Shiau, J.T. Analysis of extreme flood events for the Pachang River, Taiwan. Water Resour. Manag. 2005, 19, 363–374. [Google Scholar] [CrossRef]
- Stedinger, J.R.; Vogel, R.M.; Foufoula-Georgiou, E. Frequency analysis of extreme events. In Handbook of Hydrology; Maidment, D.R., Ed.; McGraw-Hill: New York, NY, USA, 1993; Chapter 18. [Google Scholar]
- Xiao, Y.; Guo, S.; Liu, P.; Yan, B.; Chen, L. Design flood hydrograph based on multicharacteristic synthesis index method. J. Hydrol. Eng. 2009, 14, 1359–1364. [Google Scholar] [CrossRef]
- General Directorate of State Hydraulic Works (DSI). Kirazdere Dam Engineering Hydrology and Planning Report; Prepared by 1st Regional Directorate of State Hydraulics Works; Planning and Science Board: Bursa, Turkey, 1983. (In Turkish)
- Mediero, L.; Garrote, L.; Martin-Carrasco, F. A probabilistic model to support reservoir operation decisions during flash floods. Hydrol. Sci. J. ASCE 2007, 52, 523–537. [Google Scholar] [CrossRef]
- Jørgensen, J.B. Moving Horizon Estimation and Control. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2005. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Return Periods (Years) | Project Value (m3/s) |
|---|---|
| 5 | 208 |
| 10 | 297 |
| 25 | 410 |
| 50 | 506 |
| 100 | 597 |
| Hindcasting Experiment | Total CPU Time (s) |
|---|---|
| MPC with DSF | 151 |
| TB-MPC with 1 tree branch | 491 |
| TB-MPC with 2 tree branches | 551 |
| TB-MPC with 4 tree branches | 633 |
| TB-MPC with 8 tree branches | 677 |
| TB-MPC with 16 tree branches | 867 |
| TB-MPC with 32 tree branches | 1354 |
| Flood Hydrograph | Scenarios | Peakflow at Yuvacik Outlet (m3/s) | |
|---|---|---|---|
| Deterministic MPC | Stochastic MPC | ||
| Q25 | Sce-Q25a | 243 | 231 |
| Sce-Q25b | 255 | 243 | |
| Sce-Q25c | 248 | 243 | |
| Q50 | Sce-Q50a | 241 | 211 |
| Sce-Q50b | 245 | 200 | |
| Sce-Q50c | 246 | 200 | |
| Q100 | Sce-Q100a | 242 | 200 |
| Sce-Q100b | 269 | 235 | |
| Sce-Q100c | 278 | 233 | |
| Flood Condition | Scenarios | Total Flood Volume (1 × 106 m3) | |
|---|---|---|---|
| Deterministic MPC | Stochastic MPC | ||
| Q25 | Sce-Q25a | 0.507 | 0.302 |
| Sce-Q25b | 0.549 | 0.254 | |
| Sce-Q25c | 0.438 | 0.271 | |
| Q50 | Sce-Q50a | 0.666 | 0.062 |
| Sce-Q50b | 0.471 | 0.004 | |
| Sce-Q50c | 0.331 | 0.004 | |
| Q100 | Sce-Q100a | 0.690 | 0.004 |
| Sce-Q100b | 1.256 | 0.184 | |
| Sce-Q100c | 1.018 | 0.127 | |
| Flood Condition | Scenarios | Flood Storage Index (FSI) | |
|---|---|---|---|
| Deterministic MPC | Stochastic MPC | ||
| Q25 | Sce-Q25a | 0.652 | 0.800 |
| Sce-Q25b | 0.659 | 0.990 | |
| Sce-Q25c | 0.659 | 0.796 | |
| Q50 | Sce-Q50a | 0.566 | 0.723 |
| Sce-Q50b | 0.598 | 0.770 | |
| Sce-Q50c | 0.606 | 0.758 | |
| Q100 | Sce-Q100a | 0.457 | 0.650 |
| Sce-Q100b | 0.463 | 0.645 | |
| Sce-Q100c | 0.456 | 0.645 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uysal, G.; Alvarado-Montero, R.; Schwanenberg, D.; Şensoy, A. Real-Time Flood Control by Tree-Based Model Predictive Control Including Forecast Uncertainty: A Case Study Reservoir in Turkey. Water 2018, 10, 340. https://doi.org/10.3390/w10030340
Uysal G, Alvarado-Montero R, Schwanenberg D, Şensoy A. Real-Time Flood Control by Tree-Based Model Predictive Control Including Forecast Uncertainty: A Case Study Reservoir in Turkey. Water. 2018; 10(3):340. https://doi.org/10.3390/w10030340
Chicago/Turabian StyleUysal, Gökçen, Rodolfo Alvarado-Montero, Dirk Schwanenberg, and Aynur Şensoy. 2018. "Real-Time Flood Control by Tree-Based Model Predictive Control Including Forecast Uncertainty: A Case Study Reservoir in Turkey" Water 10, no. 3: 340. https://doi.org/10.3390/w10030340