Precision Irrigation Scheduling Using ECH2O Moisture Sensors for Lettuce Cultivated in a Soilless Substrate Culture

1
School of the Environment and Safety Engineering, Institute of Environment Health and Ecological Security, Jiangsu University, Zhenjiang 212013, China
2
College of Engineering, Huazhong Agriculture University, Wuhan 430070, China
*
Author to whom correspondence should be addressed.
Water 2018, 10(5), 549; https://doi.org/10.3390/w10050549
Submission received: 17 March 2018
/
Revised: 18 April 2018
/
Accepted: 21 April 2018
/
Published: 25 April 2018
(This article belongs to the Special Issue Advances in Agriculture Water Efficiency)
Abstract
:Soilless culture has become an effective technique to avoid continuous cropping obstacles in protected horticulture. The reliable measurement of substrate moisture and a rational irrigation are difficult tasks because of the low water-holding capacity of the substrate. Our objectives were to study the irrigation scheduling based on the ECH2O moisture sensor(EC-5), using a matched model of wetting pattern and lettuce root zone in the substrate under drip irrigation. The EC-5 sensor was designed to connect to a controller, and a threshold value of 0.14 cm3/cm3 was set for irrigation scheduling. The controller turned on the irrigation system via communication with a solenoid valve on the irrigation line and with the EC-5 sensor in response to a threshold value and stopped when the overlap area of the wetting pattern and crop root zone was more than 90%. The EC-5 sensors were installed at a horizontal distance from each plant and depth of 3 and 4 cm, respectively, under the substrate surface to the check substrate moisture for lettuce cultivation, and at (3,15) cm or (6,15) cm to monitor leakage. These parameters were determined by simultaneously considering the distance from the plants, the depths of effective root water extraction, and the region of substrate wetted volume under drip irrigation. Leakage occurred during each irrigation process, but the leakage ratewas15.7% lower than that of conventional irrigation, as a result of irrigation scheduling in the presence of the EC-5 sensors.
1. Introduction
In recent years, regulations on agriculture water use have become stricter because of increased urbanization and population growth [1] and are becoming worse because of the recent rapid expansion of land area occupied by greenhouses [2]. Several institutions have gained more utility to organize plant water use and to properly schedule agricultural, municipal, and residential irrigation by taking environmental measurements such as of evapotranspiration and of soil water content [3,4,5]. This method not only mitigates the severe water deficit, but also saves growers money, by ensuring that plants are not excessively irrigated [6].
However, most of these studies were conducted on soil. In fact, the soilless culture as a growing technique has been largely used in greenhouse because of its multiple advantages [7,8,9]. Greenhouse crops are commonly irrigated on the basis of the visual appearance of the substrate or plants or the use of irrigation timers, but these methods are not accurate and will not result in efficient irrigation [1]. To irrigate a crop grown in substrates with the right amount of water and achieve high yields, the water must be precisely applied to the crop because the water-holding capacity of the substrate is very low. When the volume of water absorbed exceeds the allowable water depletion of the substrate, the crop may suffer severe stress, and the yield is reduced [10]. For this reason, it is important to accurately measure the substrate water content to decide when and how much irrigation is required.
The measurements and estimates of the water content for use in irrigation scheduling in the past are not practical. The main reasons are unreliable measurements, unsuitable size, and high costs. For example, the gravimetric water content measurement is destructive and requires a lot of time to dry the samples. Neutron probes require a large space for installation and are influenced by the soil properties [11], and time-domain reflectometry (TDR) probes are expensive [12,13,14,15]. Although a tensiometer can be easily placed in a substrate with high porosity, it causes erroneous and unreliable measurements.
In recent years, electromagnetic techniques, such as ECH2O probes and Theta probes have been used to estimate the substrate water content by indirectly measuring the dielectric permittivity of the substrate [16,17,18]. Estimates of water content based on electromagnetic techniques provide real-time and in situ measurements. Probes are available in convenient sizes for substrate cultivation troughs or growbags. The electromagnetic techniques have a good application potential in the measurement of substrate water content.
The root system is the important organ to obtain water for a plant; the root growth and its distribution determine the ability of a plant to absorb the water from the wetting pattern, which then affects the crop biomass growth and grain yield [19]. The wetting pattern depends on the substrate properties and the irrigation application scheme [20]. The amount of irrigation water calculated on the basis of evapotranspiration is difficult to be administered, because the high porosity, the low bulk-density, and the initial water content of the substrate facilitate the formation of a finger stream, resulting in a reduced size of the wetting pattern and in increased losses of water, which then affects the crop root distribution and grain yield. A better understanding of the substrate wetting pattern and crop root zone are crucial for developing effective irrigation methods. However, to our knowledge, few studies have yet investigated the coupling of wetting pattern and crop root zone in substrates to design irrigation scheduling.
Lettuce is a shallow rooted and moisture-sensitive crop, and moisture stress can cause negative impacts on its yield [21]. The aims of this paper were to study the irrigation scheduling of lettuce on the basis of (i) the nondestructive monitoring of the substrate water content; (ii) the matched model of wetting pattern and crop root zone for lettuce cultivated in a substrate under drip irrigation.
2. Materials and Methods
2.1. Substrates Preparation
Aground vinegar residue (50%) and peat (50%) with a bulk density of 0.184 g/cm3was used as growth media. The saturated hydraulic conductivity was found to be 0.051 cm/s by cutting ring.
2.2. Sensor Description and Operation
ECH2O(EC-5) is often used for sensor network applications because it is cheap, easy to use, and has low energy consumption. The EC-5 sensor is small (8.9 cm length, 1.8 cm width, 0.7 cm depth) and suitable for application in greenhouses. Since the EC-5 sensor is sensitive to the substrate temperature, the compensation method was used to obtain more reliable substrate water content estimates from the sensors. The compensation model considering temperature for EC-5 sensor estimates θ(θsensor) can be described as:
where θsensor is the substrate water content (%), U is the output voltage of EC-5 (mv), T is the substrate temperature (°C), a, b, c are constant and can be obtained by EC-5 sensor temperature calibration; the details of the process can be found in reference [16].
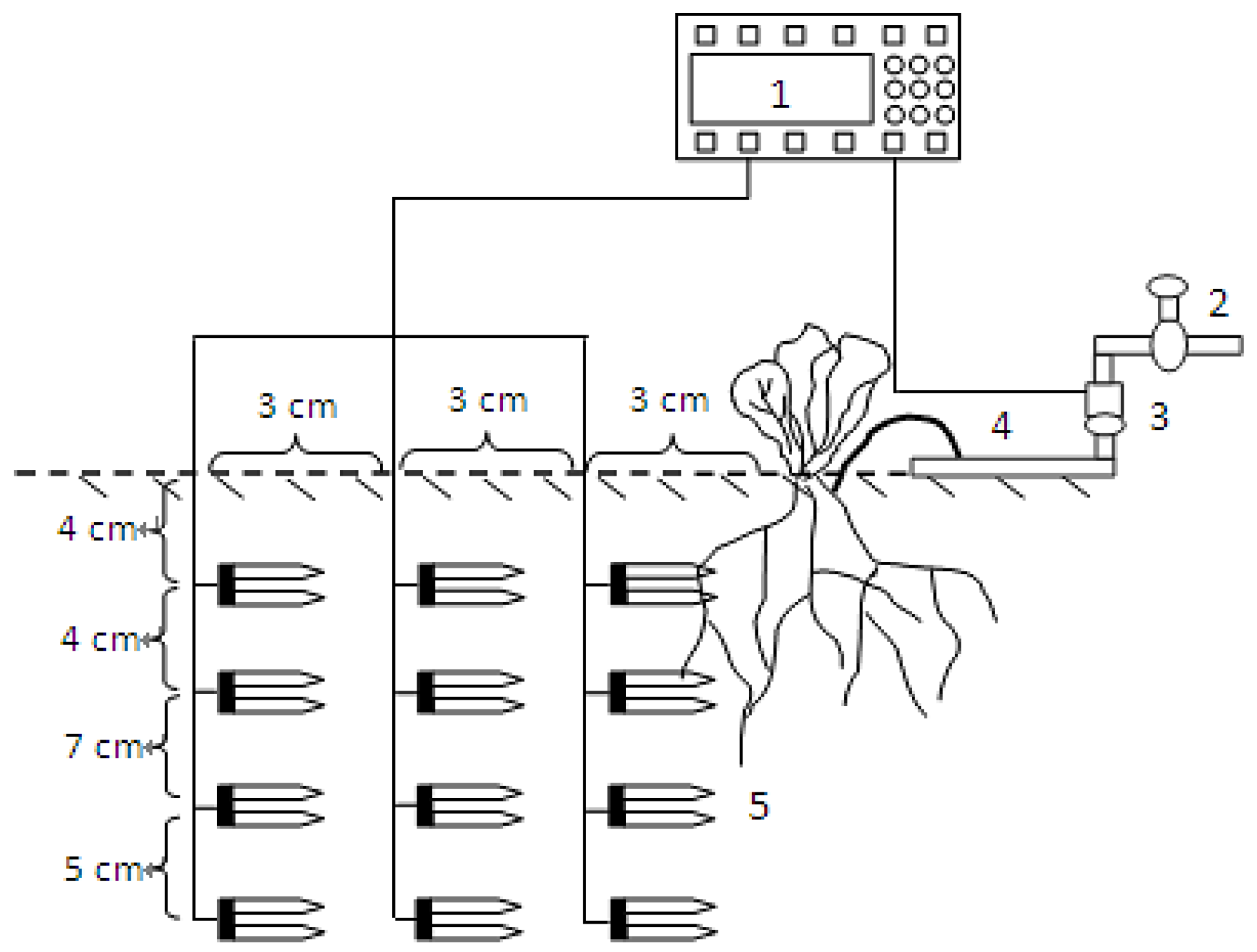
This study was conducted in a greenhouse with a cultivation tank (17 m length, 0.7 m width, 0.4 m depth).A filter collection device under the cultivation could be used to collect the leakage, and a high-precision water meter on each branch was used to measure the applied water. Lettuces were planted on lines, spaced 0.2 m apart, and the EC-5 sensors were installed at four different depths (4, 8, 15, and 20 cm) and at three different distances from the base of the plants (3, 6, and 9 cm) (Figure 1). In order to make the EC-5 sensor estimations and control irrigation, a solenoid valve and multiple sensors (EC-5) must be connected to a controller (WLT series products, Weiqian brand) for retrieving the sensors estimations and scheduling irrigation. A threshold value of 0.14 cm3/cm3, calibration equations, and parameters of the EC-5 sensor were saved in the controller programmatically. The irrigation water was applied at a rate of 0.15 L/h, 0.35 L/h, and 0.5 L/h through an emitter (SLD series products, ShunLv brand) by regulating the pressure. The root zone, the wetted radius, and the depth at different growth stages of the lettuce were measured by the dig method, and the actual water content was measured by the drying method. Three replications were used for each experiment.
2.3. Wetting Pattern Model
There are many factors affecting the substrate wetting pattern under drip irrigation. Someof these factors are: saturated hydraulic conductivity (Ks), initial volumetric moisture content (θ), irrigation amounts (V), irrigation flow (q), and emitter depth (z) [22]. The wetted radius (W) and the wetted depth (D) can be described as:
where W is the wetted radius (cm), D is the wetted depth (cm), V is the irrigation volume (L), Ks is the saturated hydraulic conductivity (cm/h), q is the emitter discharge (L/h), z is the depth of emitter insert into the substrate (cm), A1, A2 are constants, and n1, n2 are exponents of equation.
The models (2) and (3) are for predicting the wetted radius of the substrate surface and the wetted depth in the substrate. The wetting pattern under the substrate surface was estimated by an empirical model, according to the experiment data and as demonstrated, as:
where X and Y are the wetted radius and the wetted depth at a specific application time and at any position of the wetting front, and α is the angle between the wetted radius (W) and the wetted depth (D).
2.4. Root Zone Model
Roots are the sole part of the crops that take up water and nutrients from the soil. Root growth and distribution are important plant traits, highly dependent on the environment where the crop is growing [23]. The root depth and root zone radius are used to describe the root system, are often found to increase with temperature [24], and can be described with a single function. The root depth (Z) and root zone radius (R) can be described as:
where is the growth rate of the root depth (cm/day−1), bz is a constant (cm°C−1day−1), Ta is the daily mean air temperature (°C), Tb is the base temperature for root growth (°C), Z is the root depth (cm), R is the root zone radius (cm), d, e, f, g are coefficients that can be described as:
where C is an undetermined coefficient d, e, f, g, h, i, j, k are the corresponding constants of d, e, f, g, respectively, according to Table 1. DD is the cumulative temperature (°C) and can be described as [19]:
where Tm is the maximum temperature for root growth (°C).
2.5. Matched Model of Wetting Pattern and Crop Root Zone
A reasonable matching between substrate wetting pattern and crop root zone is one of the keys to irrigation scheduling using EC-5 sensors. In order to attain a reasonable match and irrigation, the following matching principles were proposed: (i) the water distribution uniformity and the overlap area of wetting pattern and crop root zone is more than 90%; (ii) the water in the crop root zone is enough for the growth of crops; (iii) the leakage from the crop root zone should be as little as possible.
The matching results directly affect the irrigation scheduling and crops growth. The substrate must be fully wet before field transplanting. The substrate wetting pattern and crop root zone were regarded as relatively evenly distributed, and a proper overlap degree section area of substrate wetting pattern and crop root zone (overlap(R,W)) was used to indicate the matching results and can be described as:
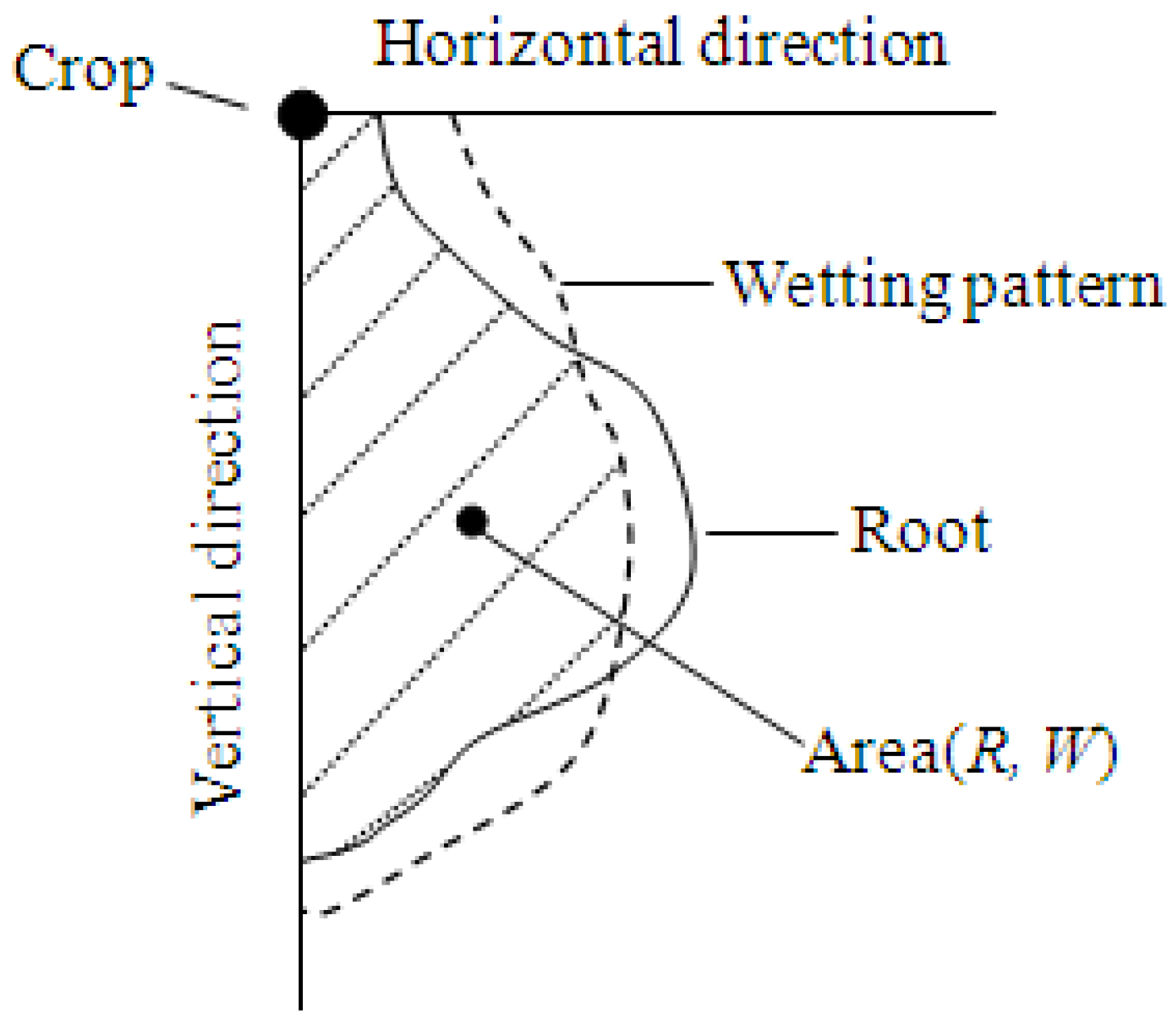
where area(R,W) is the overlap area of substrate wetting pattern and crop root zone (cm2) and can be described by the minimal area of the piecewise curve based on the intersection points of Equations (4), (5), and (7) (Figure 2), and area(R) is the area of crop root zone (cm2) and can be described as:
3. Results and Discussion
3.1. Model Calibration
The core of irrigation scheduling is the accurate precision of the wetting pattern model, root zone model, and EC-5 sensor, which can be affected by substrate type, substrate temperature, crop species, weather conditions, and so on. Model calibration becomes an integral part of the modeling exercise to obtain the parameter values which will determine the quality of the model predictions. All the simulated values were calculated experimentally through the formulas (1) to (9) with the estimated calibration coefficients (Table 1 and Table 2); the models could correctly forecast the substrate wetting pattern, lettuce root zone, and EC-5 sensor detection value. The comparisons between the simulated and the observed values of the substrate wetting pattern, lettuce root zone, and substrate moisture are presented to show the results of our model calibration (because of the large volume of data, Table 3 shows only part of them). The simulated and observed values were very close, and the RAE (Relative Absolute Error) values were less than 12% for all calibration models. It can be concluded that the calibrated wetting pattern model, root zone model, and EC-5 sensor calibration model can accurately simulate the substrate wetting pattern, lettuce root zone, and substrate water content under drip irrigation condition, respectively.
3.2. Sensor Number and Placement
The use of sensors for substrate water monitoring should take under consideration factors such as the number of stations for readings and their placement. The sensor number and placement are important factors affecting the efficiency of drip irrigation scheduling systems. The moisture sensor is highly priced, and their numbers increase the final cost. In addition, their poor placement that is not representative of the substrate moisture conditions in the root zone can result either in crop water stress or in over-irrigation. The sensor number and placement depend not only on the root distribution, but also on the water state in the root zone.
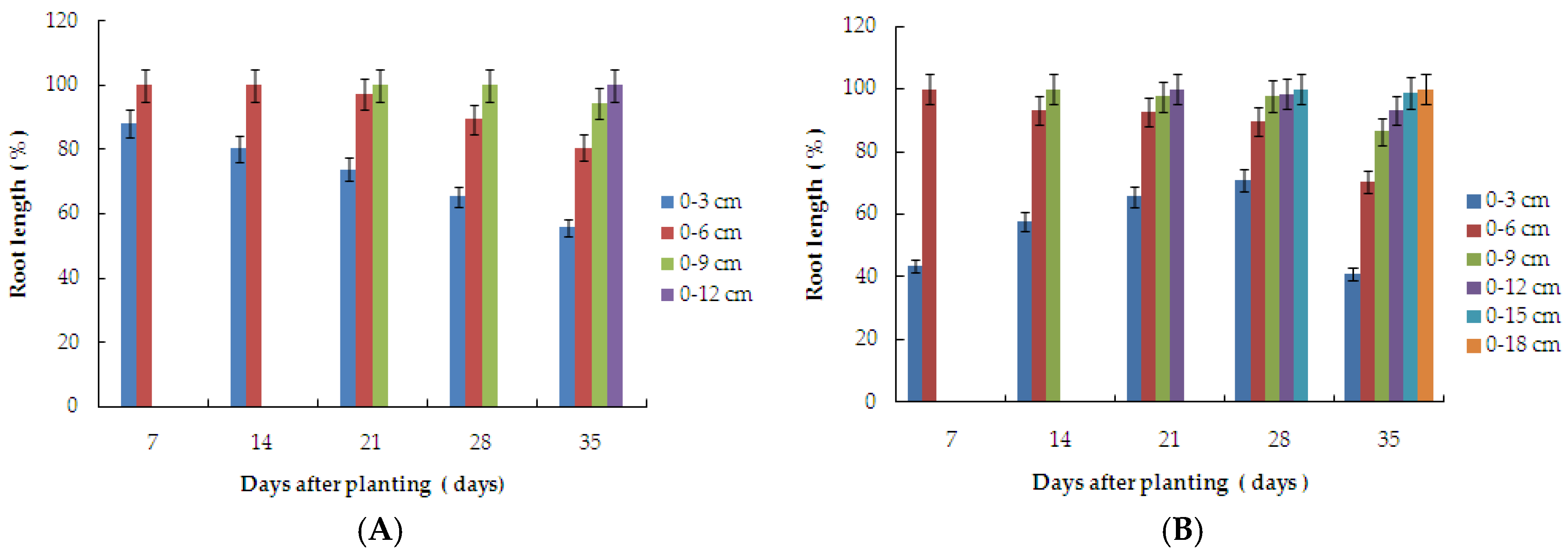
The concept of effective root depth and root distance taking into account 80% of total root length measured by the plant root growth monitoring system (CID Bio-Science/CI-600, Camas, WA, USA) was used to express the main root distribution. It was found that 86.37 to 100% of total root length was at depths of 0 to 9 cm, and 80.25 to 100% at a distance less than 6 cm from the plant in the longitudinal and orthogonal profiles to plant row at different times after lettuce planting (Figure 3A,B). The best region for sensor placement should be at a distance from the plants of less than 6 cm and at a maximum depth of 9 cm, on the basis of the effective root depth and root distance. However, it is not enough to define the positions where to install the sensors, the adequate position for installing the sensors should also consider the region in which variations in water content can highly influence root water extraction.
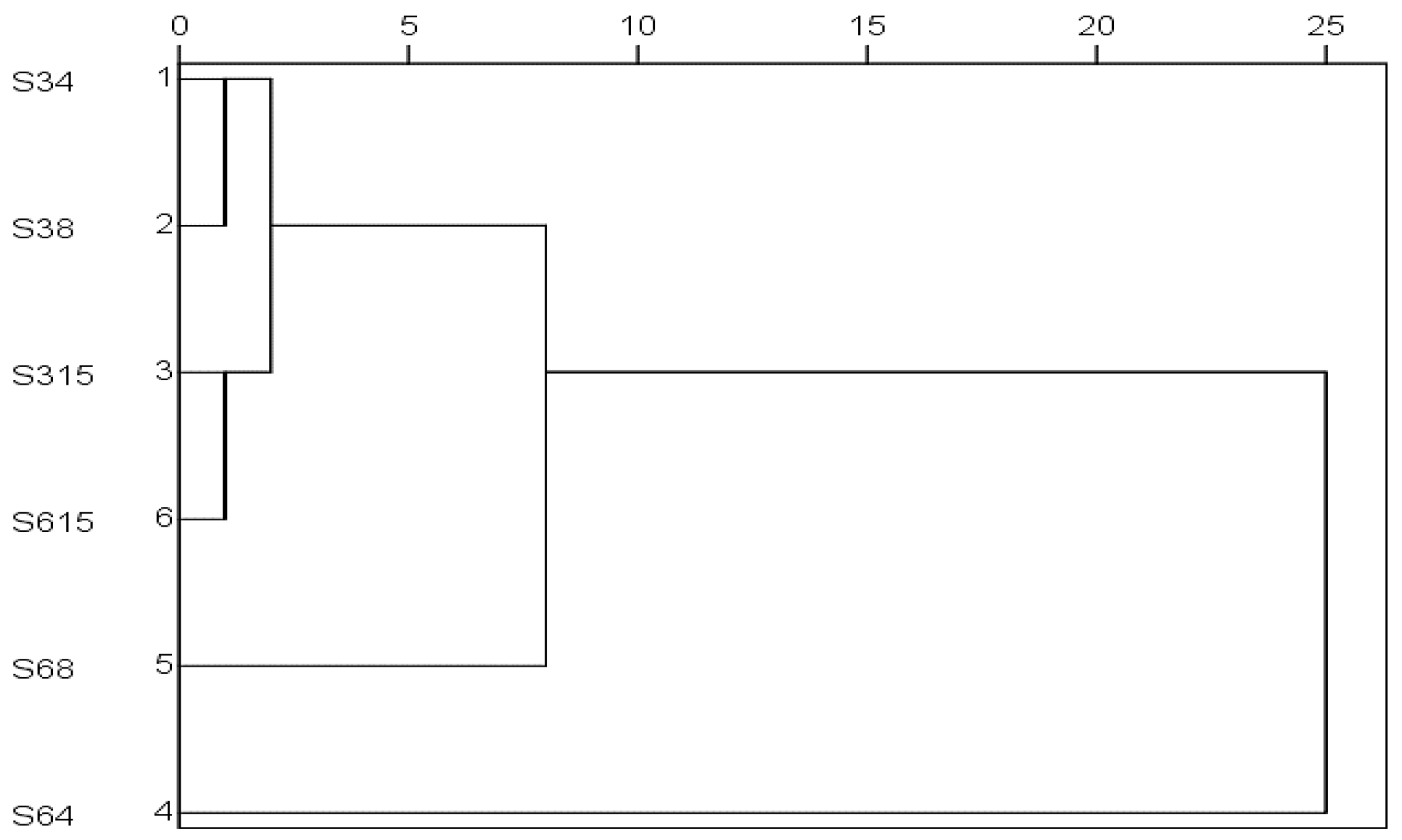
The main root distribution is not enough to define the position for installing sensors by itself, because the water state at different depths in the root zone, which reflects the ability of water extraction by the root, must be considered. It can be expressed by the variability and cluster analysis, and allows to further optimize the sensor number and placement. The parameters of average value, standard deviation, and coefficient of variation in Table 4 were the average values of three EC-5 sensors, 23 h after stopping the irrigation. The coefficient of variation decreased with increasing substrate depth, the values at (3,4) cm and (3,8) cm under the substrate surface were very obvious and close, and show that the region in the range of 0–8 cm is the main region for root water extraction. This is consistent with the effective root depth and root distance and suggests that the sensors will be more accurate at distances of 3 cm from the plants and a maximum depth of 8 cm.
The cluster analysis in Figure 4 indicated that the substrate water variables at (3,4) cm and (3,8) cm, and (3,15) cm and (6,15) cm first merged together, respectively. This means that the substrate water variables were similar at (3,4) cm and (3,8) cm, and at (3,15) cm and (6,15) cm, so an EC-5 sensor can be installed at (3,4) cm or (3,8) cm, and at (3,15) cm or (6,15) cm. When combining the region of the main root distribution and root water extraction with the EC-5 sensor detection area (cylinder with a column diameter of 4 cm), the adequate position for installing an EC-5 sensor was found to be at (3,4) cm under the substrate surface to check substrate moisture for lettuce cultivation, and at (3,15) cm or (6,15) cm to monitor the bottom layer leakage.
3.3. Moisture Dynamic in Irrigation
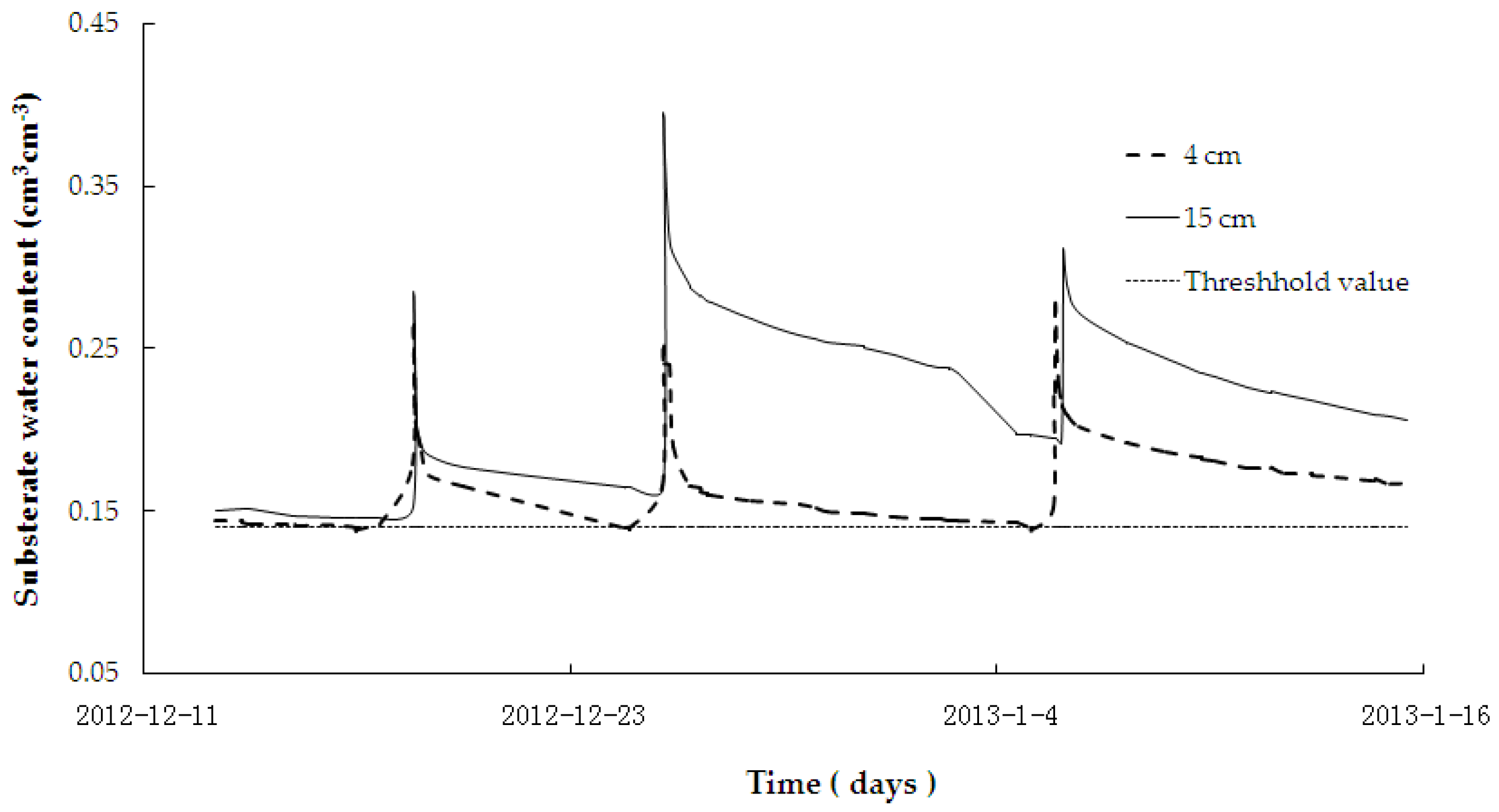
The irrigation begun when the substrate moisture content detected by the sensors in the crop root was lower than the threshold value of 0.14 cm3/cm3, and the irrigation stopped when the overlap area of wetting pattern and crop root zone (overlap(R,W) was more than 90%. The substrate moisture dynamic at the depths of 4 cm and 15 cm under the substrate surface was monitored by theEC-5 sensors (Figure 5). It was observed that the water content at the depths of 4 cm and 15 cm changed in a similar manner and was always higher than the threshold value of 0.14 cm3/cm3, but the water content at 15 cm lagged behind compared with that at 4 cm. This shows that the EC-5 sensor’s ability to maintain a reasonable water content in the main root zone, the wetting pattern, and the main root zone could fulfill the real-time requirements, and when irrigation was stopped, the bottom layer leakage was already occurring. Irrigation was performed only three times within more than one month, and the maximum leakage occurred during the second irrigation, mainly because of the large emitter discharge of the second irrigation and of the substrate low water-holding capacity caused by large particles of the ground vinegar residue.
Although leakage occurred, the leakage ratewas15.71% lower than that occurring during conventional irrigation, as a result of precise irrigation achieved with the EC-5 sensors (Table 5). Because of this, the lettuce did not show signs of water stress and was green and healthy. In addition, compared with conventional ways of providing sufficient irrigation, this irrigation scheduling, saves irrigation water, increases the productivity of the irrigation water, and makes good use of limited water resources.
4. Conclusions
In this study, a controller with EC-5 sensors and a solenoid valve was used to control irrigation in a greenhouse. The EC-5 sensor compensation model, wetting pattern model, and root zone model were used to calibrate the EC-5 sensor, simulate the wetting pattern and the main root zone of lettuce, determine the relationship between them, and calculate a threshold value 0.14 cm3/cm3, which were used to establish an irrigation scheduling that was saved within the controller programmatically. In this setting, the controller turns on the irrigation system via communication with the solenoid valve on the irrigation line and the EC-5 sensor when a threshold value is reached and stops when the overlap area of wetting pattern and crop root zone is more than 90%.
The distance from lettuce, the depths of effective root water extraction, and the region of substrate wetted volume under drip irrigation should be considered for the definition of the EC-5 sensor’s placement. The adequate position for installing an EC-5 sensor is at (3,4) cm under the substrate surface to check substrate moisture for lettuce cultivation, and at (3,15) cm or (6,15) cm to monitor the bottom layer leakage.
Even if leakage occurred during each irrigation, the leakage ratewas15.7% lower than that of conventional irrigation, when using irrigation scheduling with the EC-5 sensors, and the lettuce grew green and healthy.
Author Contributions
Zhigang Liu designed and carried out the simulations and wrote the paper; Qinchao Xu analyzed the data and revised the manuscript.
Funding
This research was funded by [the National Natural Science Foundation of China] grant number [51509098].
Conflicts of Interest
The authors declare no conflict of interest.
References
- Nemali, K.S.; Montesano, F.; Dove, S.K.; Van Iersel, M.W. Calibration and performance of moisture sensors in soilless substrates: ECH2O and Theta probes. Sci. Hortic. 2007, 112, 227–234. [Google Scholar] [CrossRef]
- Sánchez-Molina, J.A.; Rodríguez, F.; Guzmán, J.L.; Ramírez-Arias, J.A. Water content virtual sensor for tomatoes in coconut coir substrate for irrigation control design. Agric. Water Manag. 2015, 151, 114–125. [Google Scholar] [CrossRef]
- Cardenas-Lailhacar, B.; Dukes, M.D. Precision of soil moisture sensor irrigation controllers under field conditions. Agric. Water Manag. 2010, 97, 666–672. [Google Scholar] [CrossRef]
- Dobbs, N.A.; Migliaccio, K.W.; Dukes, M.D. Interactive Irrigation Tool for Simulating Smart Irrigation Technologies in Lawn Turf. J. Irrig. Drain. Eng. 2013, 139, 745–854. [Google Scholar] [CrossRef]
- Kenneth, F.; Heaney, J.P.; Miguel, M. Predicting and managing residential potable irrigation using parcel-level databases. J. Am. Water Works Assoc. 2013, 105, 45–46. [Google Scholar]
- Blonquist, J.M., Jr.; Jones, S.B.; Robinson, D.A. Precise irrigation scheduling for turfgrass using a subsurface electromagnetic soil moisture sensor. Agric. Water Manag. 2006, 84, 153–165. [Google Scholar] [CrossRef]
- Raviv, M.; Lieth, J.H. Soilless Culture Theory and Practice; Elsevier: New York, NY, USA, 2008; pp. 6–7. [Google Scholar]
- Naddaf, O.A.; Livieratos, I.; Stamatakis, A.; Tsirogiannis, I.; Gizas, G.; Savvas, D. Hydraulic characteristics of composted pig manure, perlite, and mixtures of them, and their impact on cucumber grown on bags. Sci. Hortic. 2011, 129, 135–141. [Google Scholar] [CrossRef]
- Liu, Z.G.; Li, P.P.; Hu, Y.G.; Wang, J. Modeling the wetting patterns in cultivation substrates under drip irrigation. J. Coast. Res. 2015, SI73, 173–176. [Google Scholar] [CrossRef]
- Rodriguez, D.; Reca, J.; Martínez, J.; Urrestarazu, M. New Adaptive Hybrid–Automatic Irrigation Control System for Soilless Culture. J. Irrig. Drain. Eng. 2015, 141, 04014083. [Google Scholar] [CrossRef]
- Li, J.; Smith, D.W.; Fityus, S.G.; Sheng, D. Numerical analysis of neutron moisture probe measurements. Int. J. Geomech. 2003, 3, 11–20. [Google Scholar] [CrossRef]
- Pelletier, M.G.; Karthikeyan, S.; Green, T.R.; Schwartz, R.C.; Wanjura, J.D.; Holt, G.A. Soil Moisture Sensing via Swept Frequency Based Microwave Sensors. Sensors 2012, 12, 753–767. [Google Scholar] [CrossRef] [PubMed]
- Park, J.S.; Son, J.E. Analysis of Moisture Characteristics in Rockwool Slabs using Time Domain Reflectometry (TDR) Sensors and Their Applications to Paprika Cultivation. Prot. Hortic. Plant Fact. 2009, 18, 238–243. [Google Scholar]
- Seo, T.C.; Kim, Y.C.; Kim, K.Y.; Yun, H.K. Optimal Supply Amount and Strength of Nutrient Solution for Ripe-harvesting Tamatioes Grown under Perlite Culture System of Semi-forcing Cropping. Korean J. Hortic. Sci. Technol. 2003, 21, 79–85. [Google Scholar]
- Morel, P.; Michel, J.C. Control of the moisture content of growing media by time domain reflectometry (TDR). Agronomie 2004, 24, 275–279. [Google Scholar] [CrossRef]
- Liu, Z.G.; Li, P.P.; Hu, Y.G.; Zhang, X. Calibration method for dectection of matrix water content with dielectric-type moisture sensor. Trans. CSAE 2011, 27, 109–202. [Google Scholar]
- Burnett, S.E.; Van Iersel, M.W. Morphology and irrigation efficiency of Gauralindheimeri grown with capacitance sensor-controlled irrigation. Hortscience 2008, 43, 1555–1560. [Google Scholar]
- Mendes, L.B.; Li, H.; Xin, H.; Barbosa do Nascimento, J.W. Evaluation of EC-5 soil moisture sensors for real-time determination of poultry manure or litter moisture content. Appl. Eng. Agric. 2014, 30, 277–284. [Google Scholar]
- Liu, Z.G.; Wang, J.Z.; Xu, Y.F.; Li, P.P. Root Growth Model of Lettuce under Different Cultivation Substrates and Irrigation Modes. Trans. Chin. Soc. Agric. Mach. 2014, 45, 284–288. [Google Scholar]
- Elnesr, M.N.; Alazba, A.A. The effects of three techniques that change the wetting patterns over subsurface drip-irrigated potatoes. Span. J. Agric. Res. 2015, 13, e1204. [Google Scholar] [CrossRef]
- Satchithanantham, S.; Krahn, V.; Sager, S. Shallow groundwater uptake and irrigation water distribution within the potato root zone. Agric. Water Manag. 2014, 132, 101–110. [Google Scholar] [CrossRef]
- Liu, Z.G.; Li, P.P.; Hu, Y.G.; Wang, J. Wetting patterns and water distributions in cultivation media under drip irrigation. Comput. Electron. Agric. 2015, 112, 200–208. [Google Scholar] [CrossRef]
- Ahmadi, S.H.; Sepaskhah, A.R.; Andersen, M.N.; Plauborg, F.; Jensen, C.R.; Hansen, S. Modeling root length density of field grown potatoes under different irrigation strategies and soil textures using artificial neural networks. Field Crops Res. 2014, 162, 99–107. [Google Scholar] [CrossRef]
- Kage, H.; Kochler, M.; StÜtzel, H. Root growth of cauliflower (Brassica oleracea L. botrytis) under unstressed condition: Measurement and modeling. Plant Soil 2000, 223, 131–145. [Google Scholar] [CrossRef]
Figure 1.
Schematic diagram of the experiment; (1) Programmable controller; (2) Pressure-regulated water source; (3) Solenoid valve; (4) Drip emitter; (5) EC-5 sensors.
Figure 1.
Schematic diagram of the experiment; (1) Programmable controller; (2) Pressure-regulated water source; (3) Solenoid valve; (4) Drip emitter; (5) EC-5 sensors.

Figure 2.
A diagram of the overlap area of substrate wetting pattern and crop root zone.

Figure 3.
Percentage of root distribution at different times after lettuce planting. (A) Horizontal distanced from plant, cm; (B) Substrate depth, cm.
Figure 3.
Percentage of root distribution at different times after lettuce planting. (A) Horizontal distanced from plant, cm; (B) Substrate depth, cm.
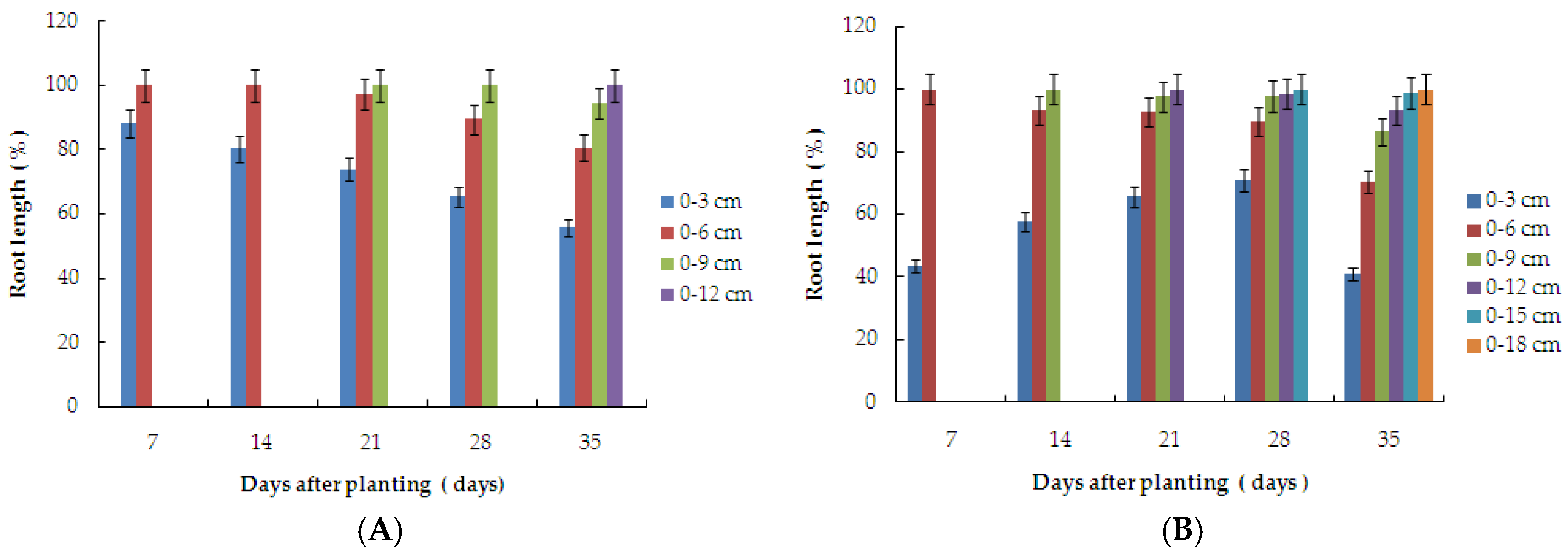
Figure 4.
Substrate water content cluster diagram under different depths.

Figure 5.
Substrate water content measured by EC-5 sensors at two depths of 4 cm and 15 cm.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The coefficients of the root zone radius model.
| Coefficient | Root Zone Radius (R) | |||
|---|---|---|---|---|
| h | i | j | k | |
| d | 5.04 × 10−10 | −5.61 × 10−7 | 4.24 × 10−5 | 0.08 |
| e | −1.15 × 10−8 | 1.48 × 10−5 | −4.48 × 10−3 | −0.53 |
| f | 4.69 × 10−8 | −7.26 × 10−5 | 2.98 × 10−2 | −0.34 |
| g | −2.67 × 10−8 | 3.58 × 10−5 | −9.95 × 10−3 | −0.46 |
Table 2.
The coefficients of the EC-5 sensor, root depth model, and wetting pattern model.
| EC-5 Sensor | Root Depth (Z) | Wetted Radius | Wetted Depth | ||||
|---|---|---|---|---|---|---|---|
| a | b | c | bz | A1 | n1 | A2 | n2 |
| 1.83 | 522.24 | 597.41 | 0.014 | 0.15 | 1.01 | 2.96 | 0.28 |
Table 3.
Results of model calibration using experiment data obtained from lettuce cultivated in a substrate under drip irrigation.
Table 3.
Results of model calibration using experiment data obtained from lettuce cultivated in a substrate under drip irrigation.
| Root Radius, R (cm) | Root Depth, Z (cm) | Wetted Radius (cm) | Wetted Depth (cm) | Substrate Moisture (%) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sim. | Obs. | RAE (%) | Sim. | Obs. | RAE (%) | Sim. | Obs. | RAE (%) | Sim. | Obs. | RAE (%) | Sim. | Obs. | RAE (%) |
| 2.06 | 2.26 | 8.85 | 5.98 | 5.95 | 0.51 | 2.92 | 2.81 | 3.92 | 3.33 | 3.15 | 5.71 | 12.35 | 13.67 | 9.66 |
| 3.58 | 3.47 | 3.17 | 7.74 | 8.50 | 8.94 | 3.85 | 4.20 | 8.33 | 4.43 | 4.60 | 3.70 | 23.71 | 26.93 | 11.96 |
| 4.58 | 4.38 | 4.57 | 9.10 | 9.43 | 3.50 | 4.43 | 4.61 | 3.91 | 5.62 | 5.23 | 7.46 | 39.01 | 35.42 | 10.14 |
| 5.33 | 5.61 | 4.99 | 11.07 | 12.20 | 9.26 | 5.84 | 5.24 | 11.45 | 5.69 | 6.33 | 10.11 | 44.61 | 41.14 | 8.44 |
| 5.26 | 5.85 | 10.09 | 13.67 | 13.15 | 3.95 | 6.71 | 7.34 | 8.58 | 6.49 | 7.03 | 7.68 | 53.26 | 50.12 | 6.27 |
| 6.74 | 7.52 | 10.37 | 15.24 | 16.12 | 5.46 | 7.02 | 7.84 | 10.46 | 7.75 | 7.04 | 10.09 | 64.11 | 60.90 | 5.27 |
RAE is relative absolute error; Sim. and Obs. represent the simulated and observed values of the relevant variables.
Table 4.
Substrate water content analysis at different depth.
| Parameter | Sensor Position | |||||
|---|---|---|---|---|---|---|
| (3,4) cm | (3,8) cm | (3,15) cm | (6,4) cm | (6,8) cm | (6,15) cm | |
| Average value % | 16.3 | 19.8 | 21.4 | 8.6 | 12.1 | 20.3 |
| Standard deviation % | 2.5 | 2.8 | 2.2 | 1.1 | 1.5 | 2.3 |
| Coefficient of variation % | 15.3 | 14.1 | 10.2 | 12.8 | 12.4 | 11.3 |
Table 5.
Total irrigation, leakage, and leakage rate.
| Irrigation Method | Irrigation Amount (kg) | Leakage Amount (kg) | Leakage Rate (%) |
|---|---|---|---|
| Conventional Irrigation | 40.26 | 10.48 | 26.03 |
| Precise Irrigation | 32.45 | 3.35 | 10.32 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Liu, Z.; Xu, Q. Precision Irrigation Scheduling Using ECH2O Moisture Sensors for Lettuce Cultivated in a Soilless Substrate Culture. Water 2018, 10, 549. https://doi.org/10.3390/w10050549
AMA Style
Liu Z, Xu Q. Precision Irrigation Scheduling Using ECH2O Moisture Sensors for Lettuce Cultivated in a Soilless Substrate Culture. Water. 2018; 10(5):549. https://doi.org/10.3390/w10050549
Chicago/Turabian StyleLiu, Zhigang, and Qinchao Xu. 2018. "Precision Irrigation Scheduling Using ECH2O Moisture Sensors for Lettuce Cultivated in a Soilless Substrate Culture" Water 10, no. 5: 549. https://doi.org/10.3390/w10050549
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.