Coupling the Modified Linear Spectral Mixture Analysis and Pixel-Swapping Methods for Improving Subpixel Water Mapping: Application to the Pearl River Delta, China


Abstract
:1. Introduction
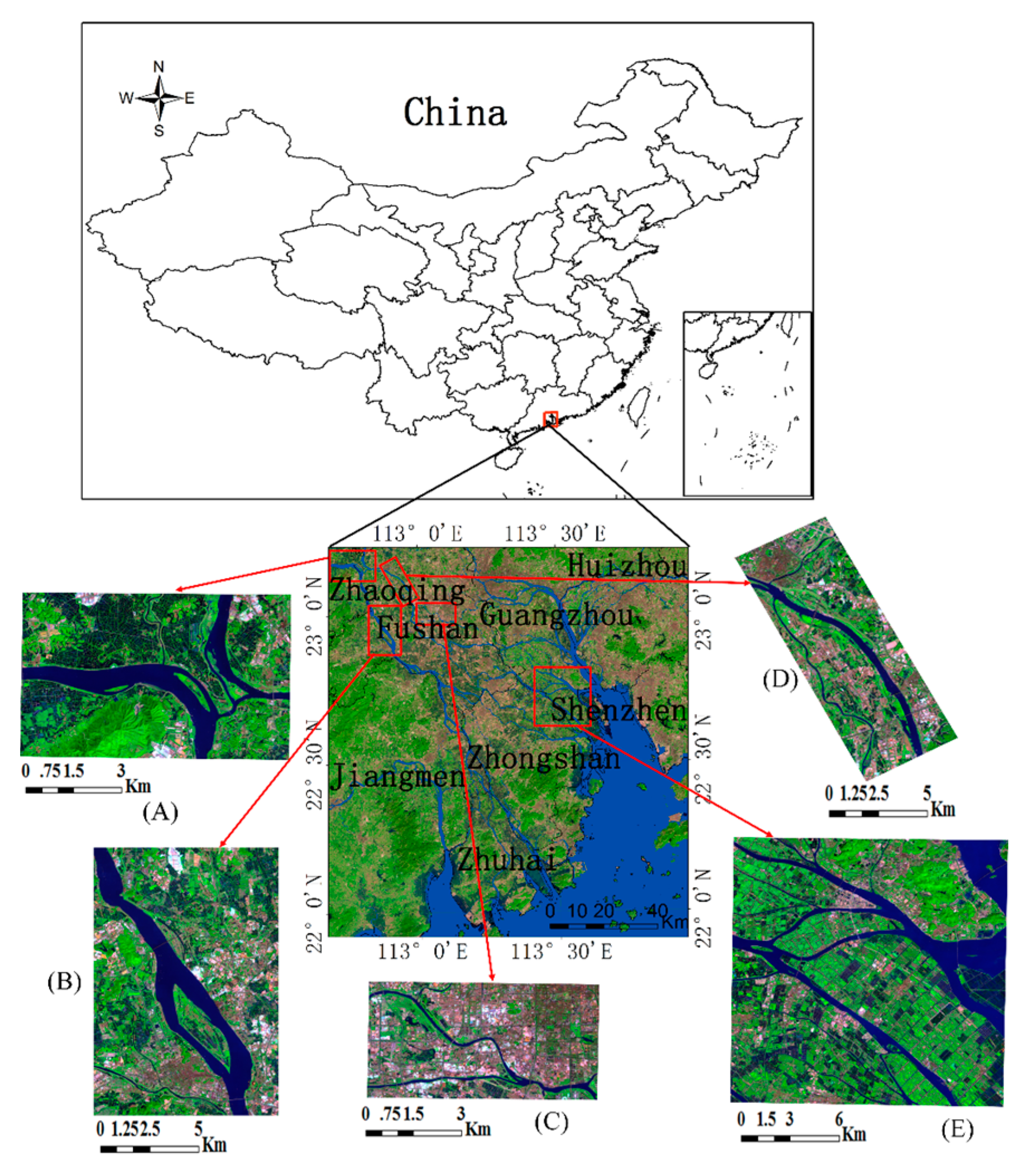
2. Study Area and Data
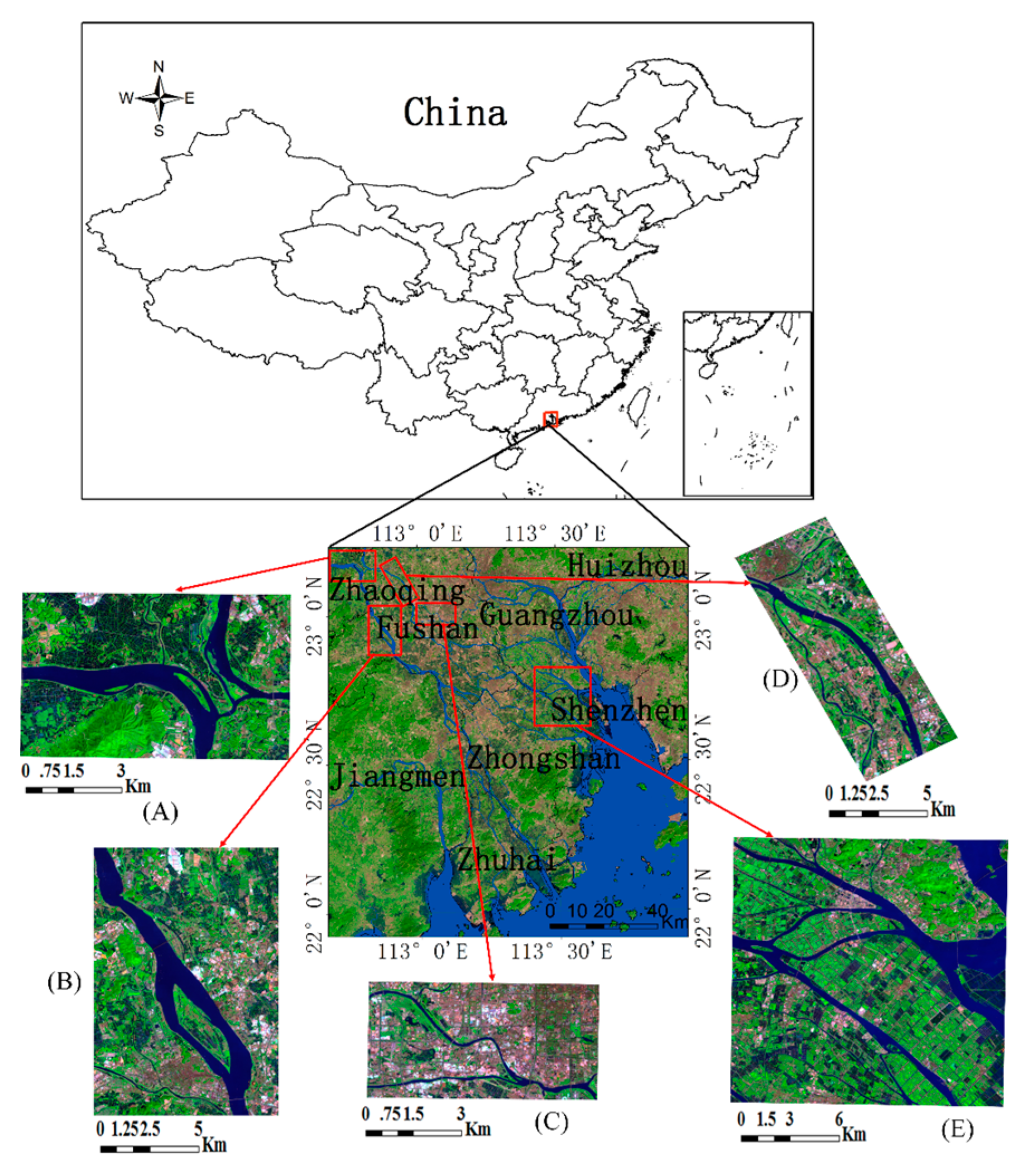
2.1. Study Area
2.2. Remote Sensing Image
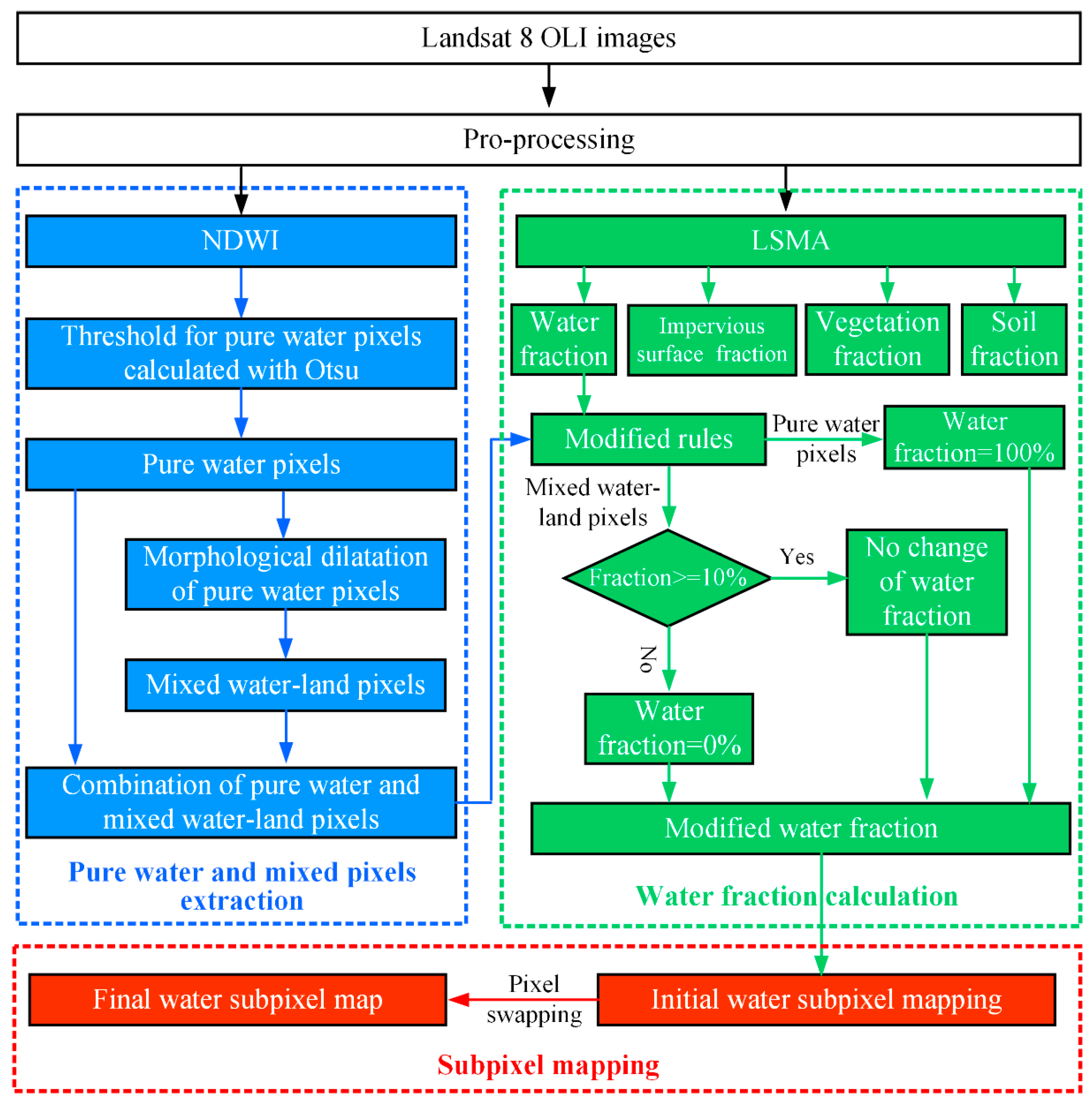
3. Methods
3.1. Automatic Extraction of Pure and Mixed Pixels
3.2. Modified Linear Spectral Mixture Analysis
3.3. Modified Subpixel Water Mapping Method
4. Results and Discussion
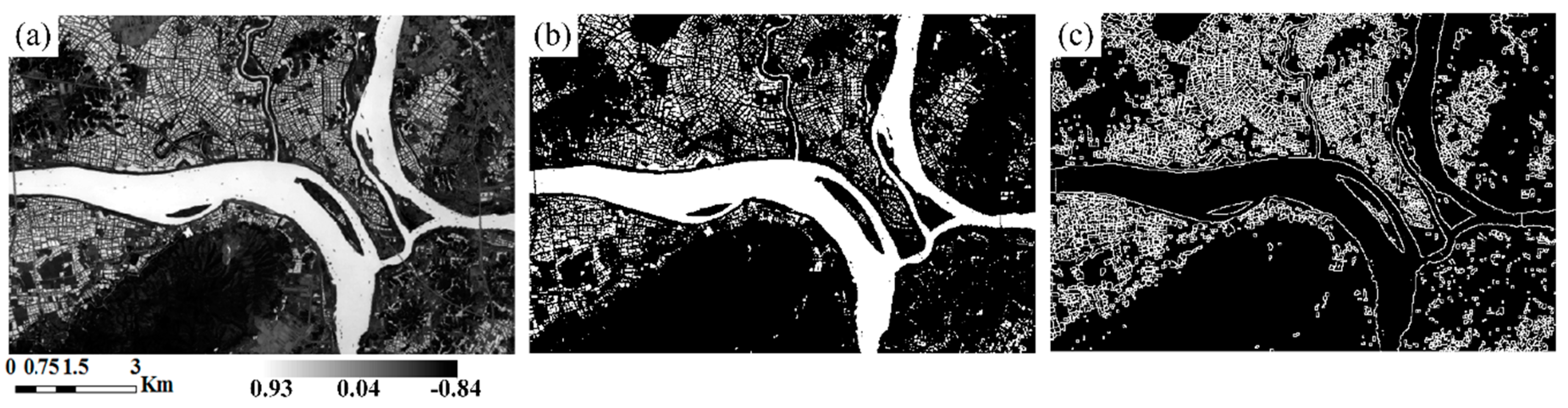
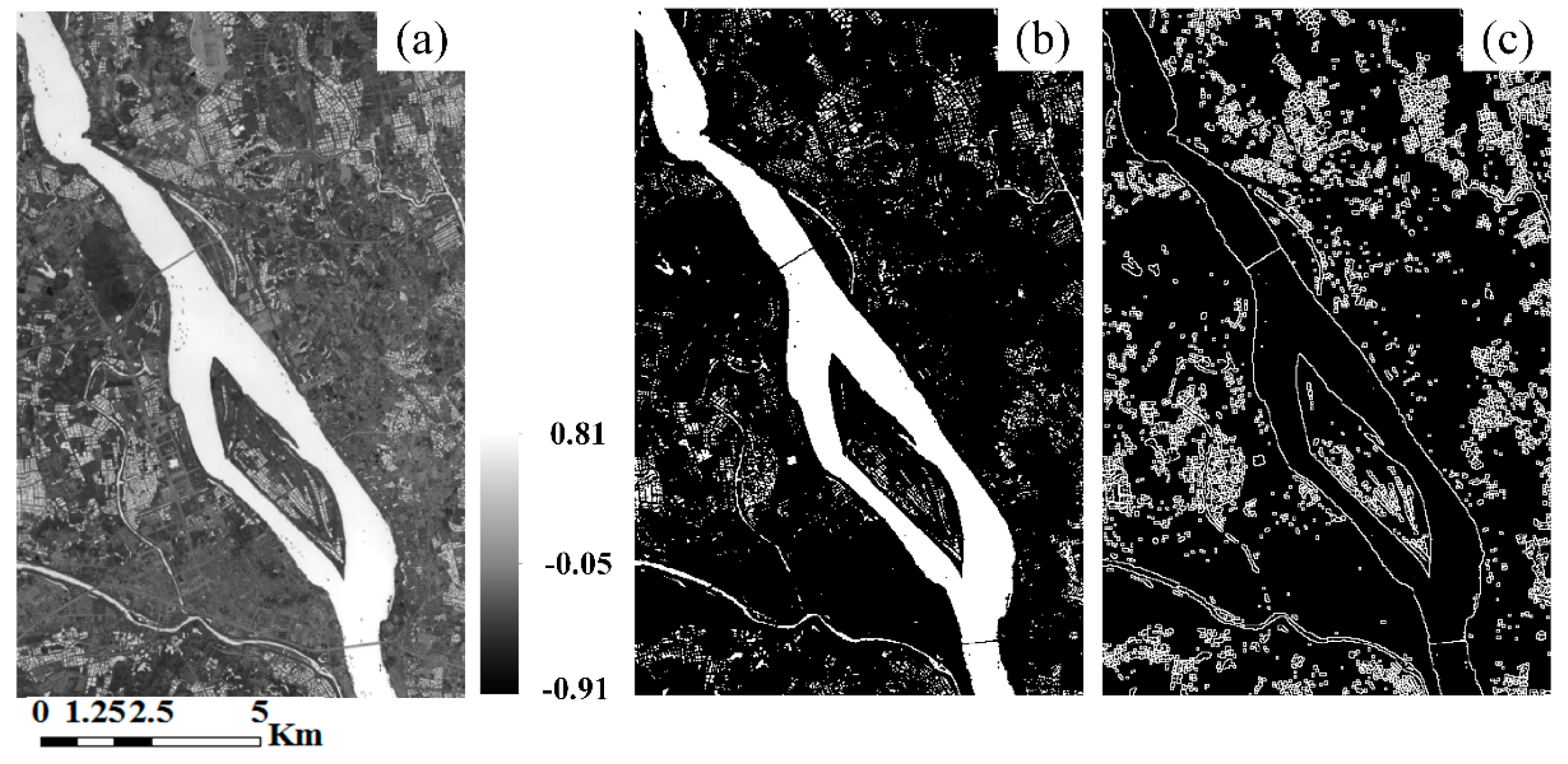
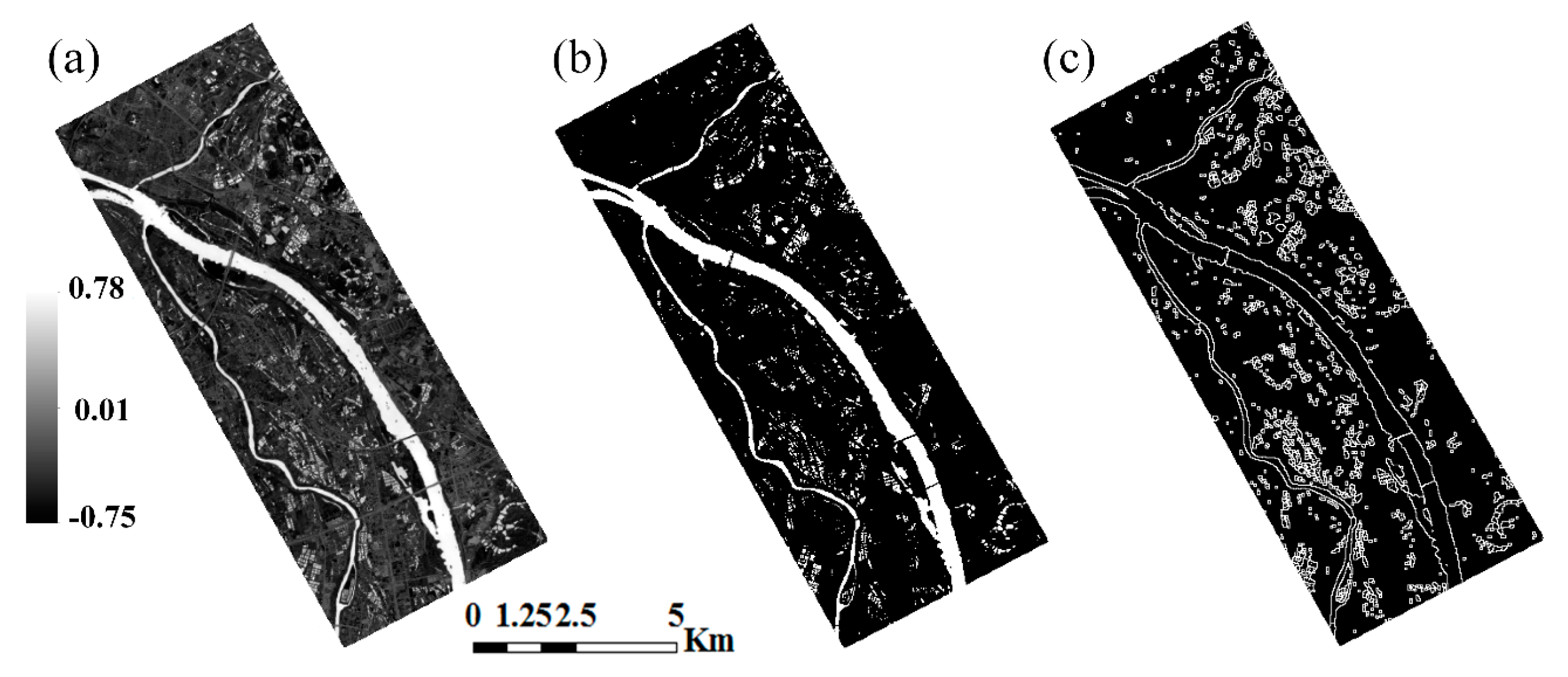
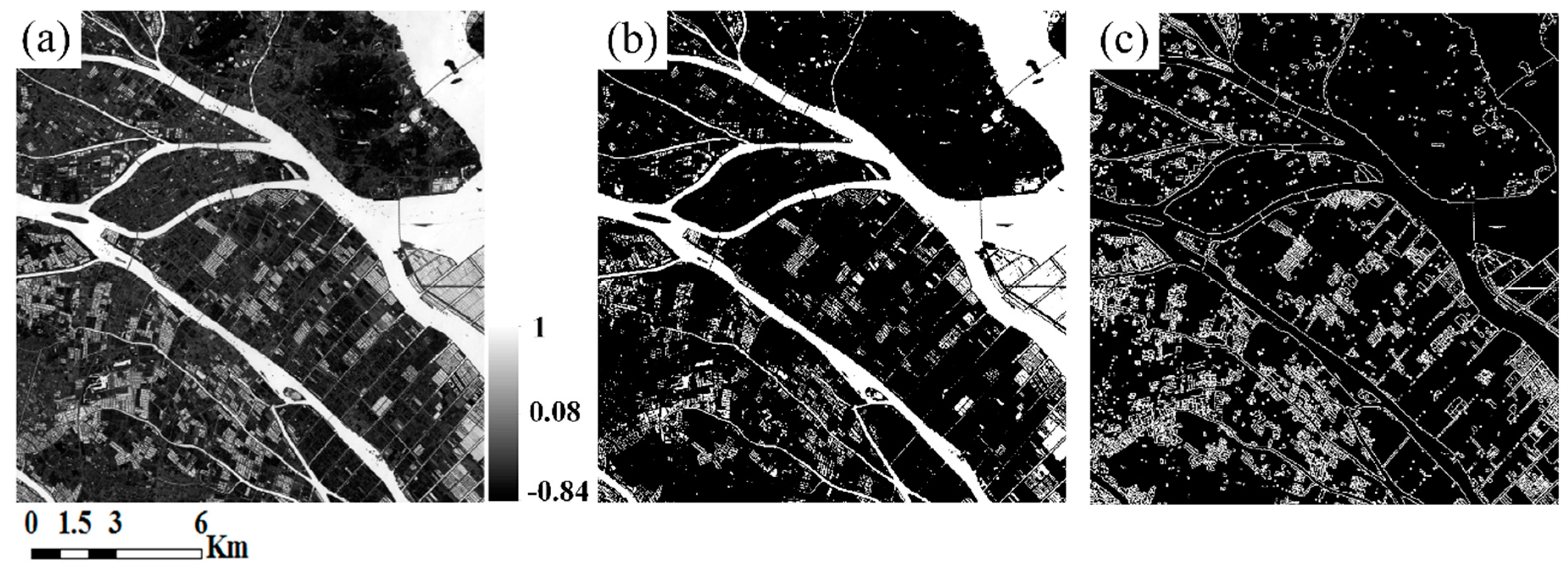
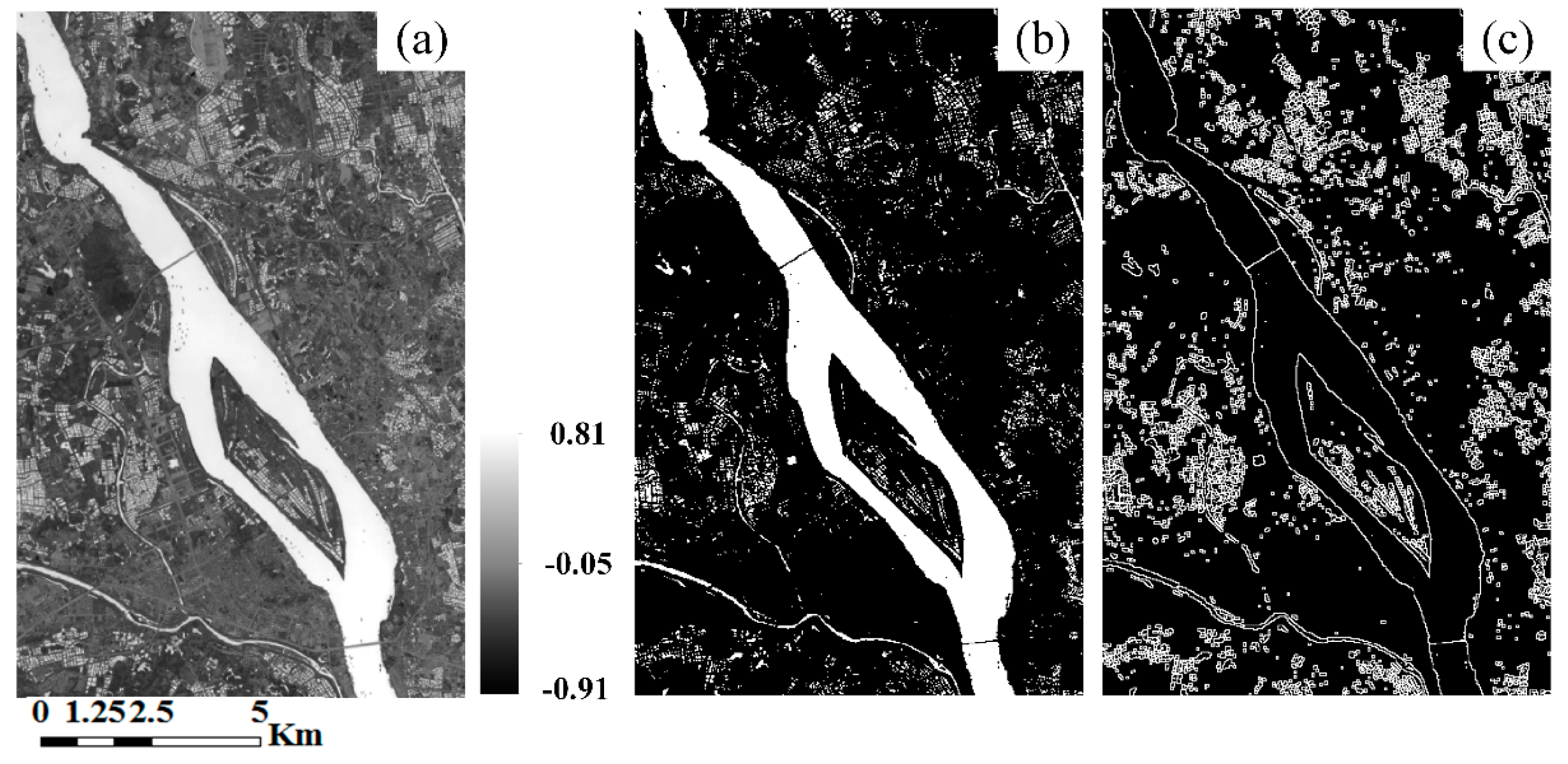
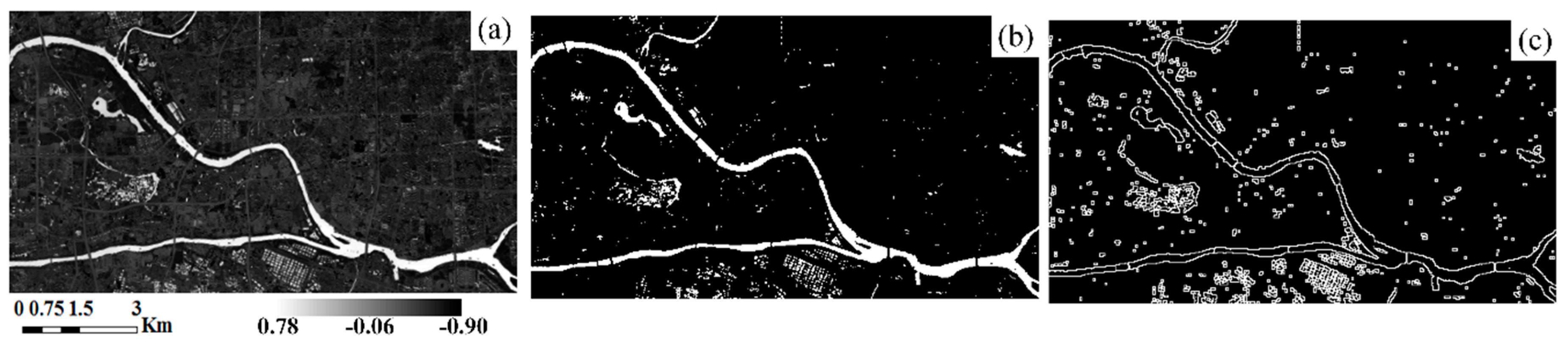
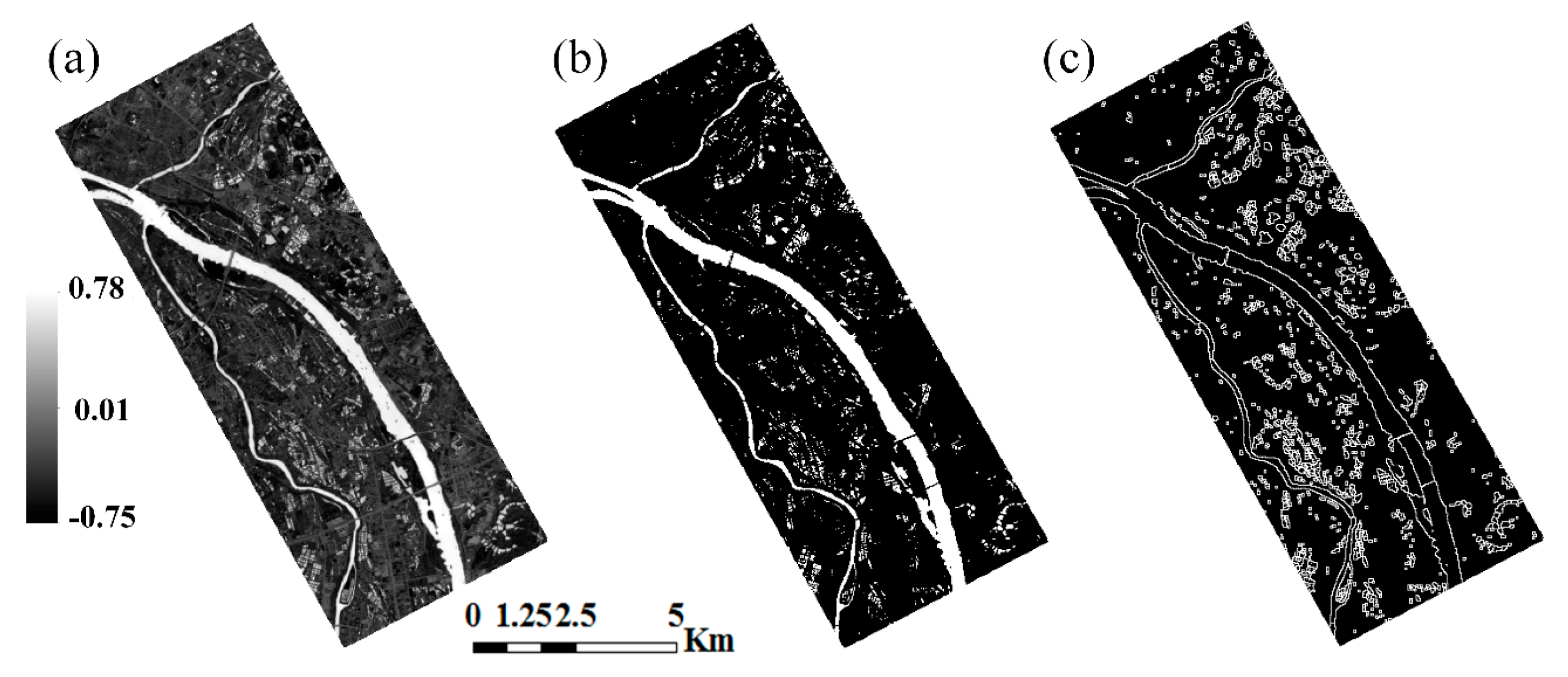
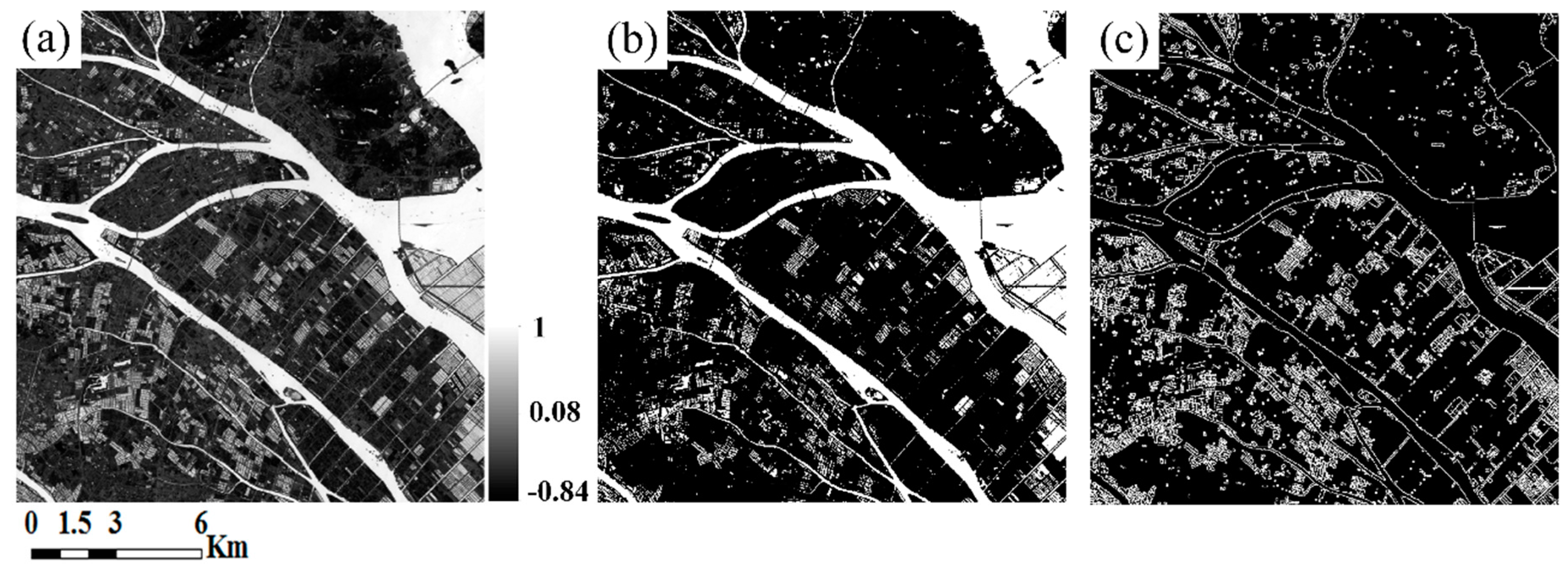
4.1. Extraction of Pure Water and Mixed Water-Land Pixels
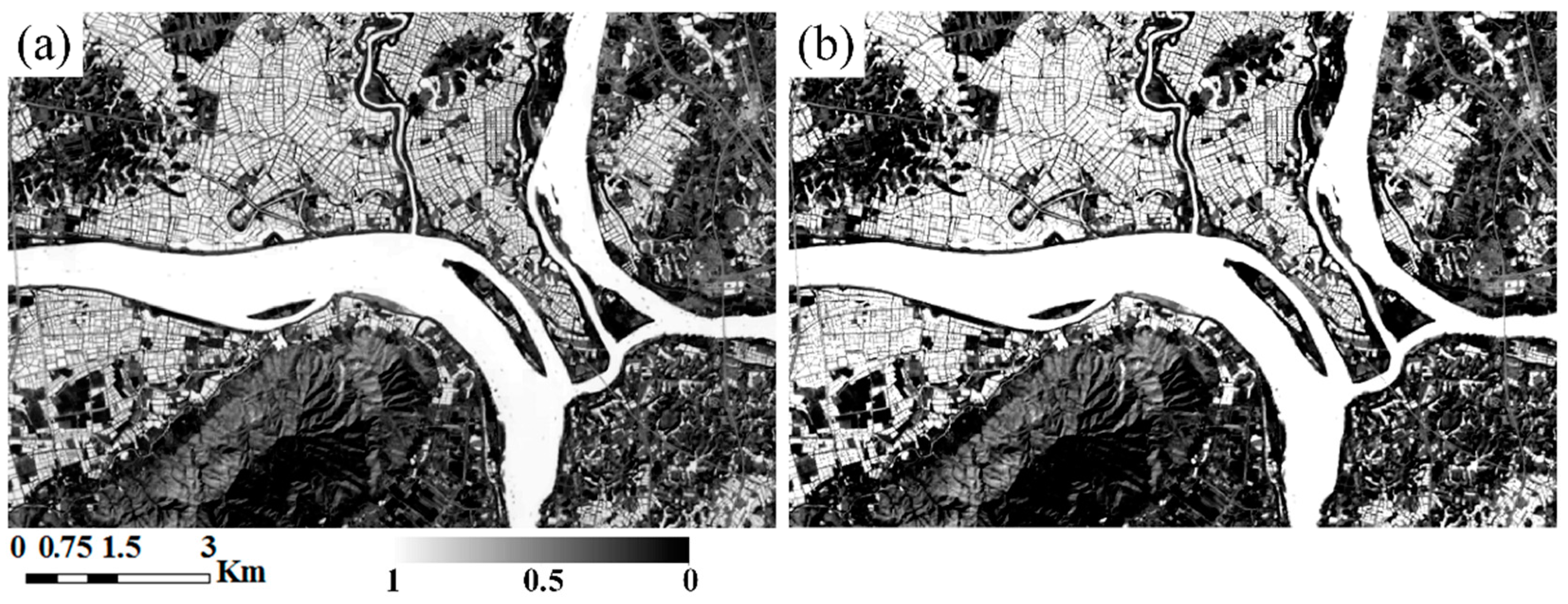
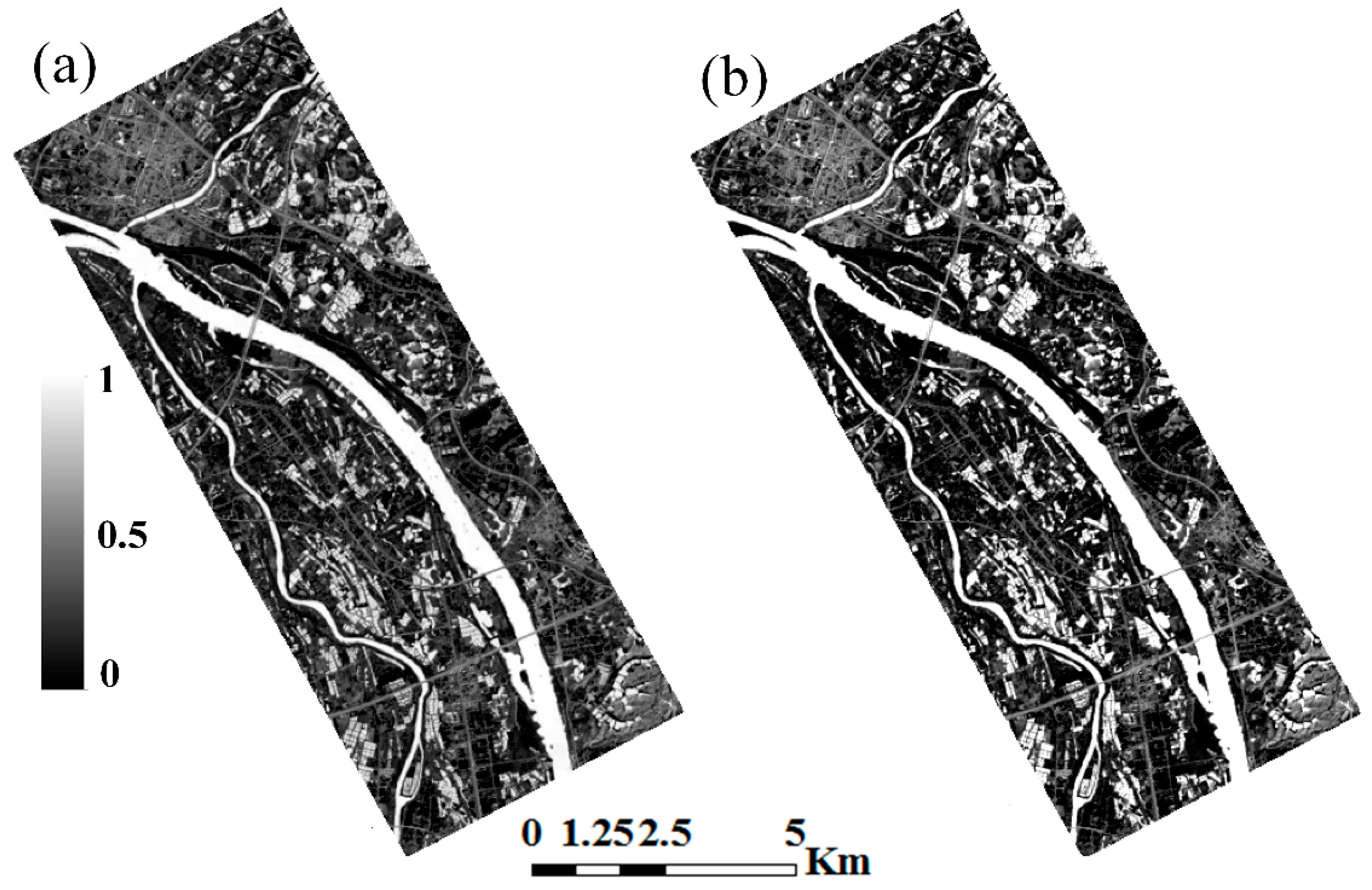
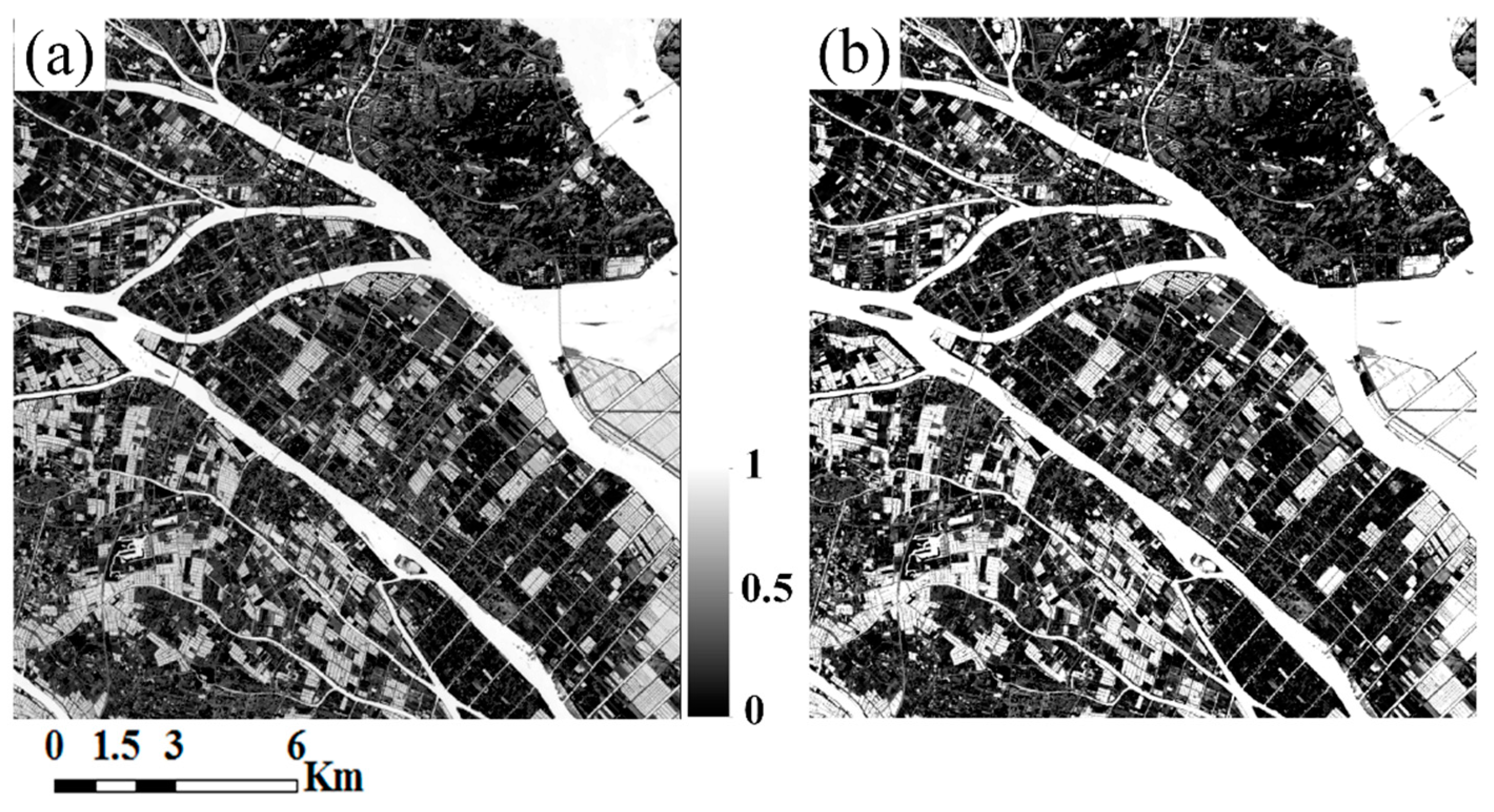
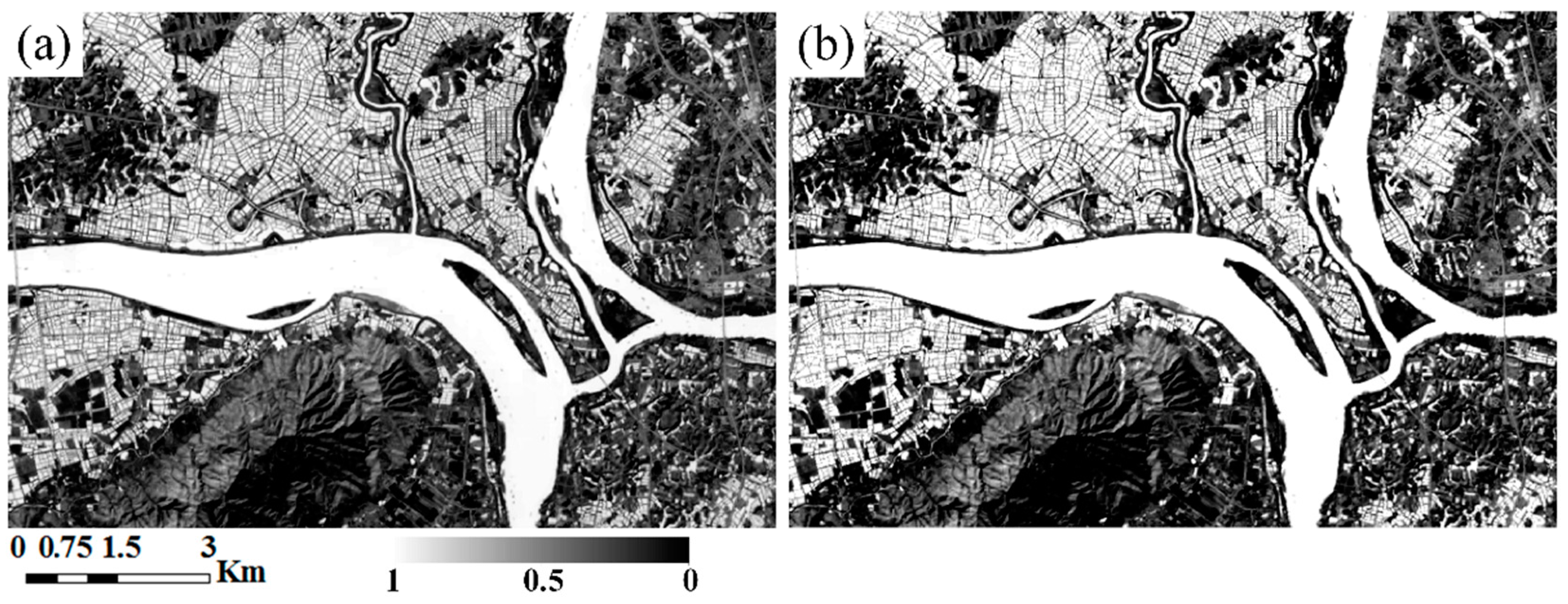
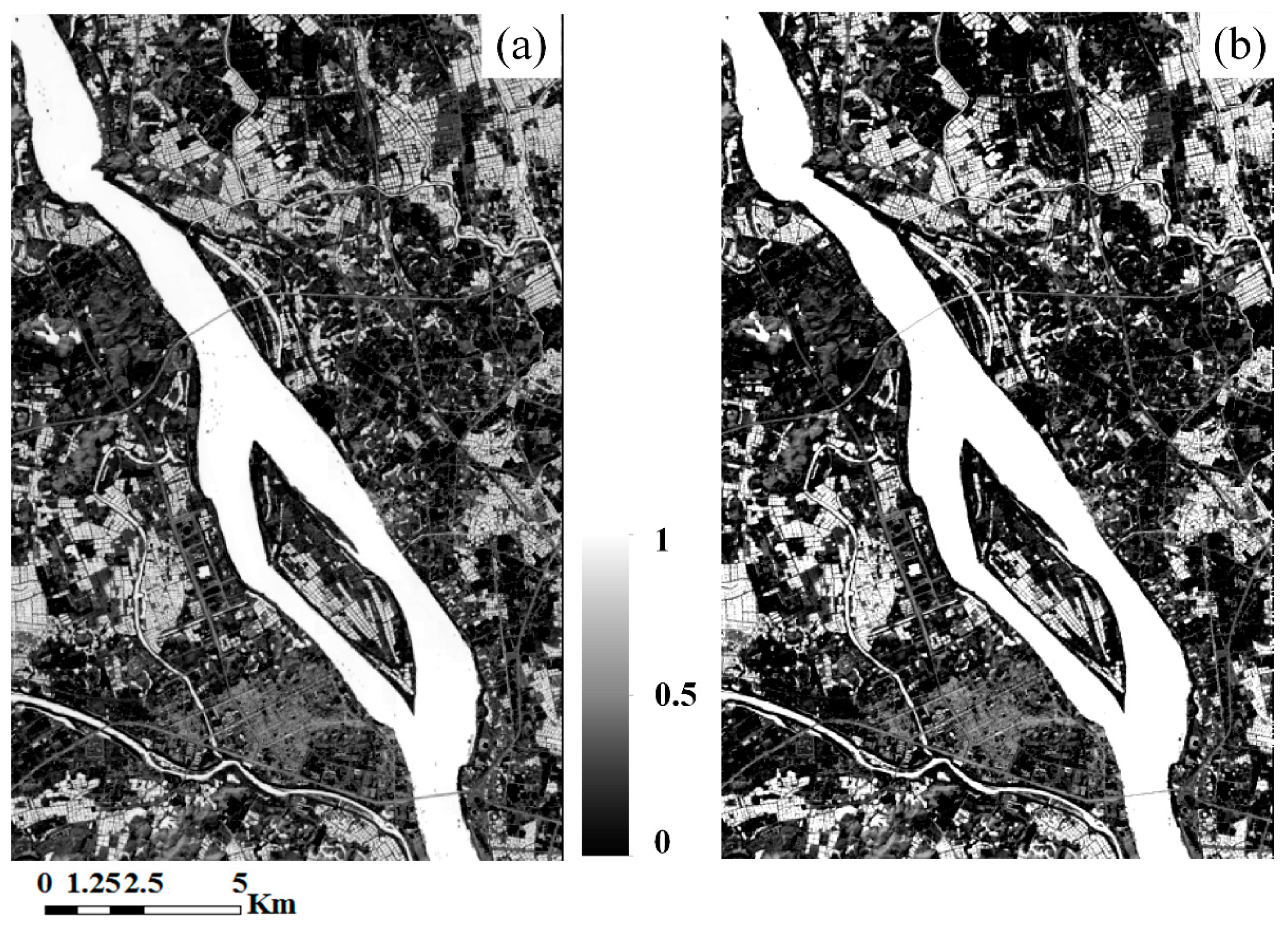
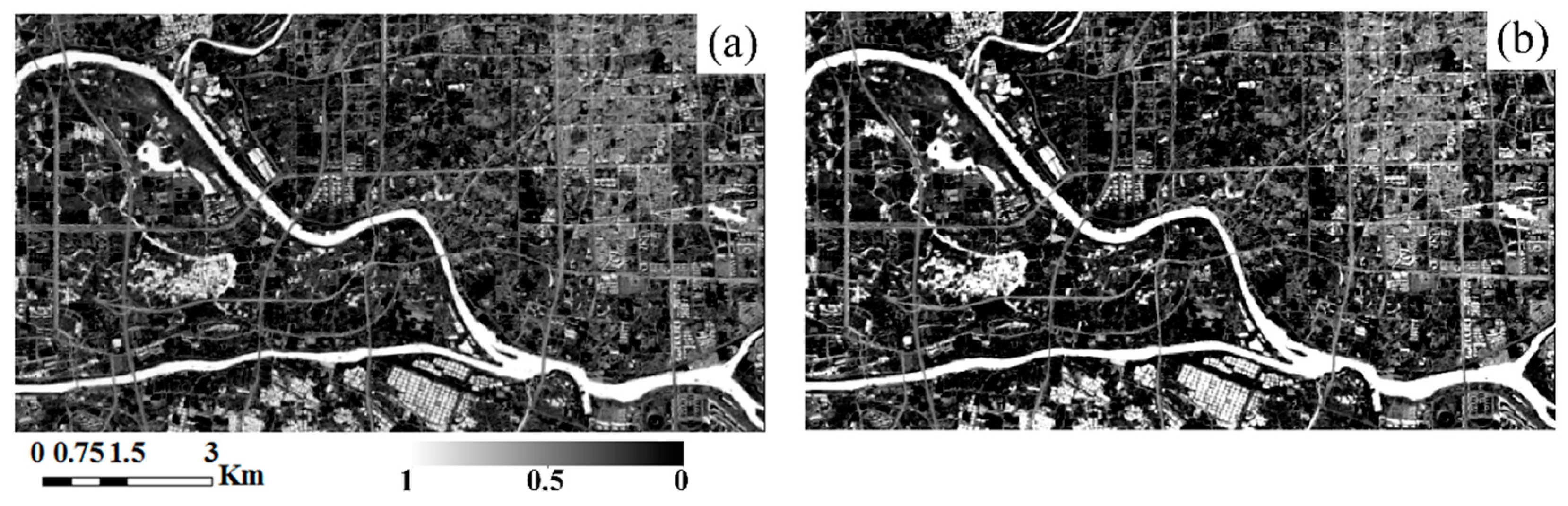
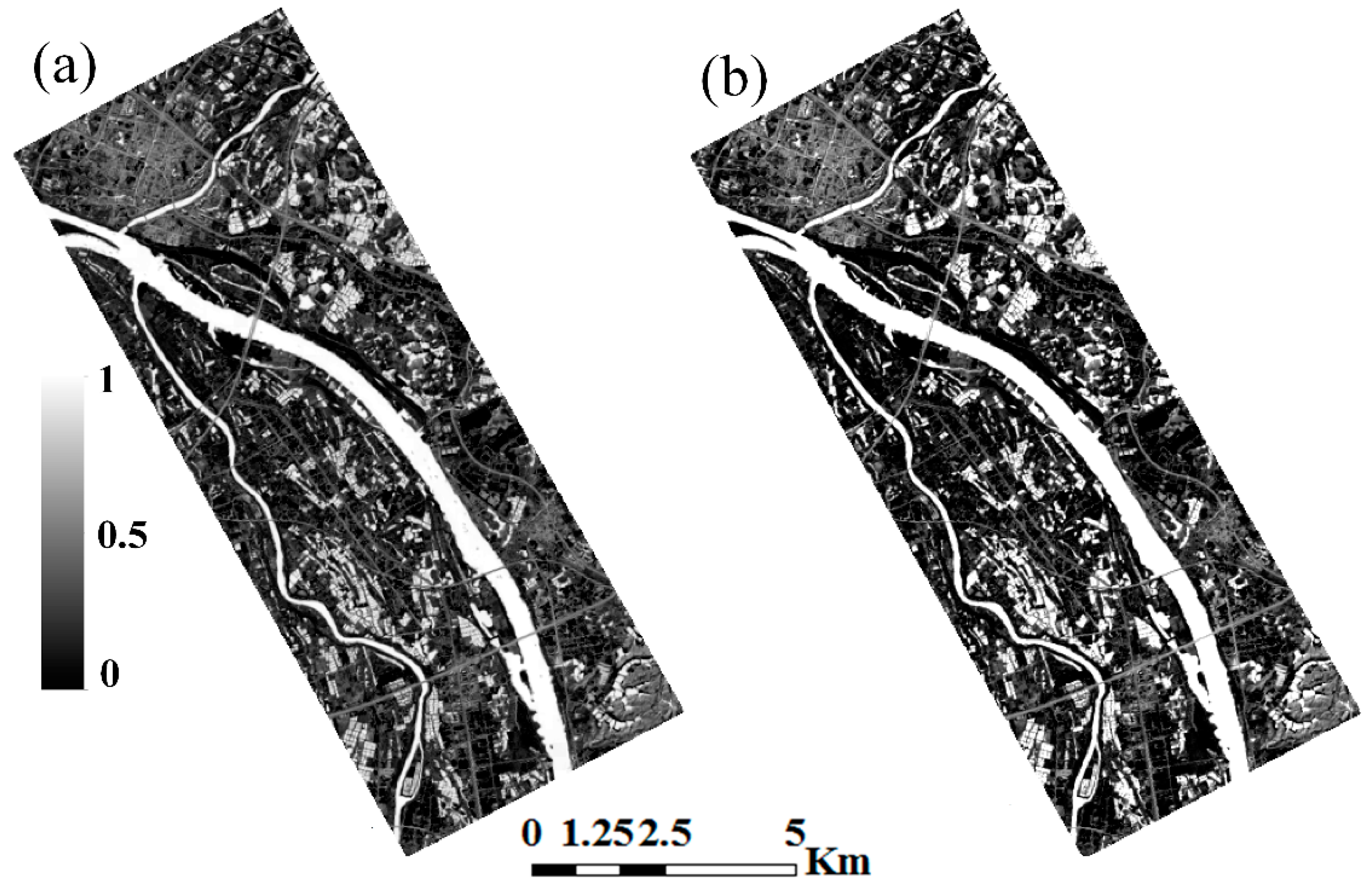
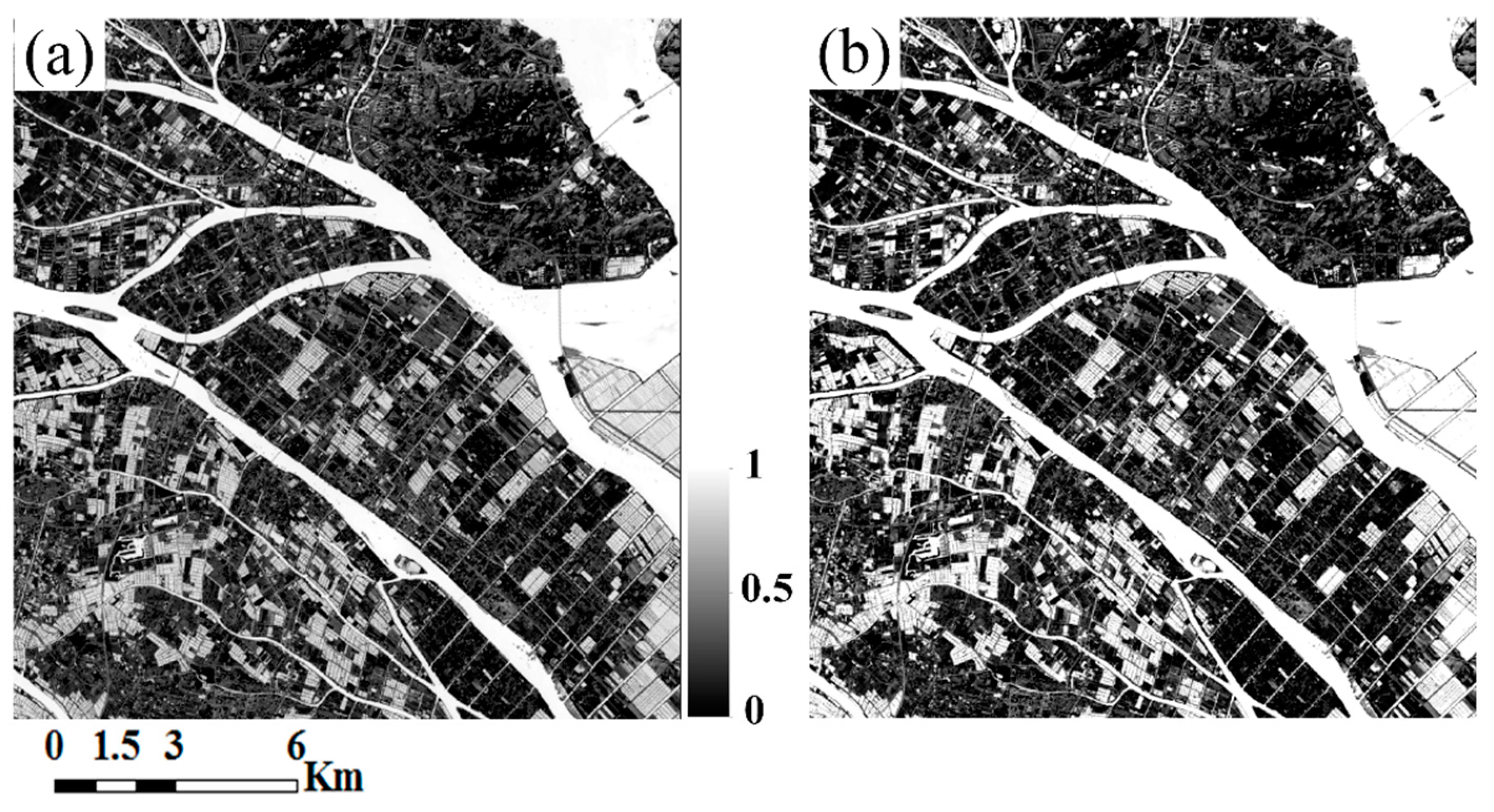
4.2. Extraction of Surface Water Fraction
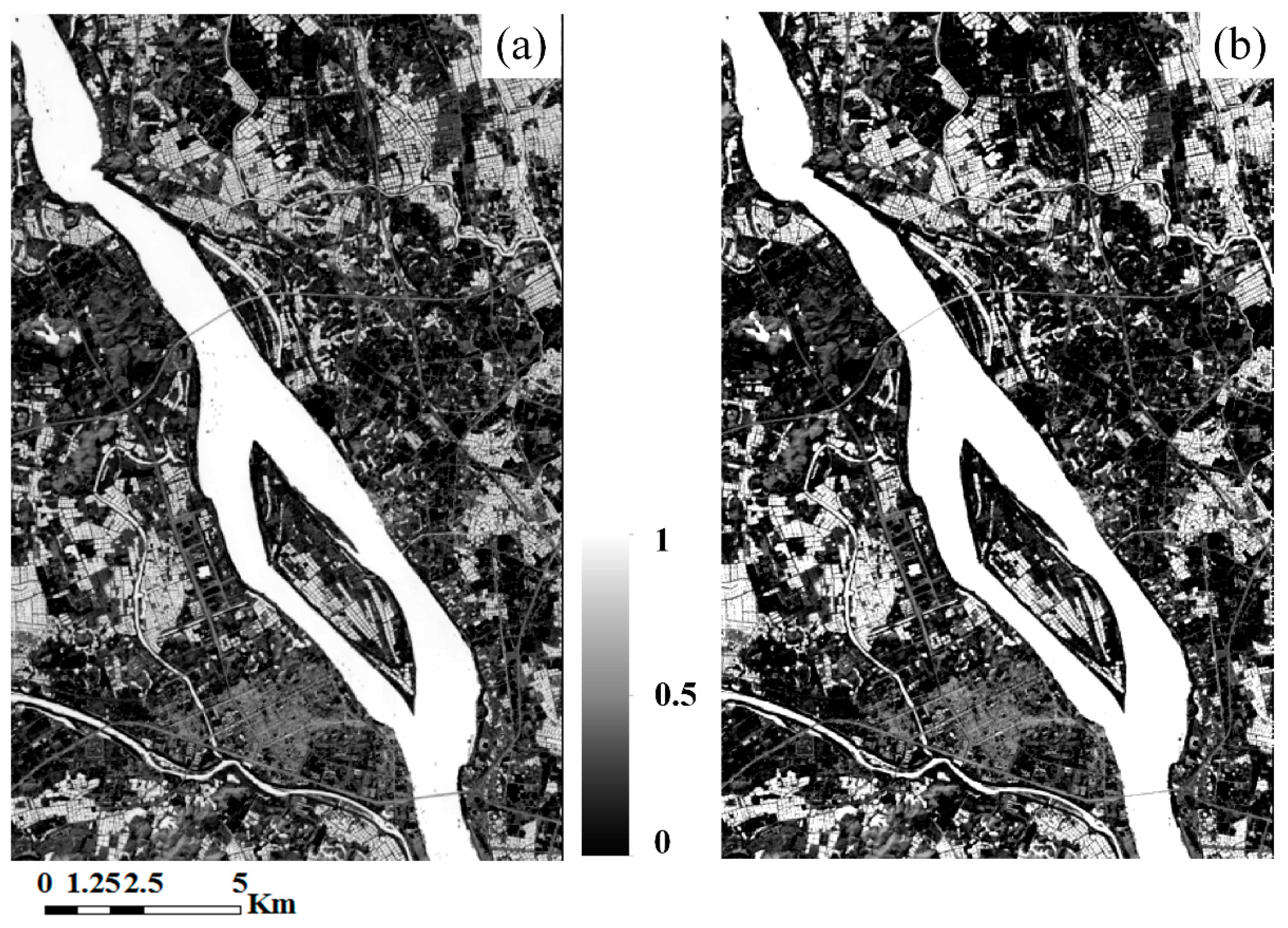
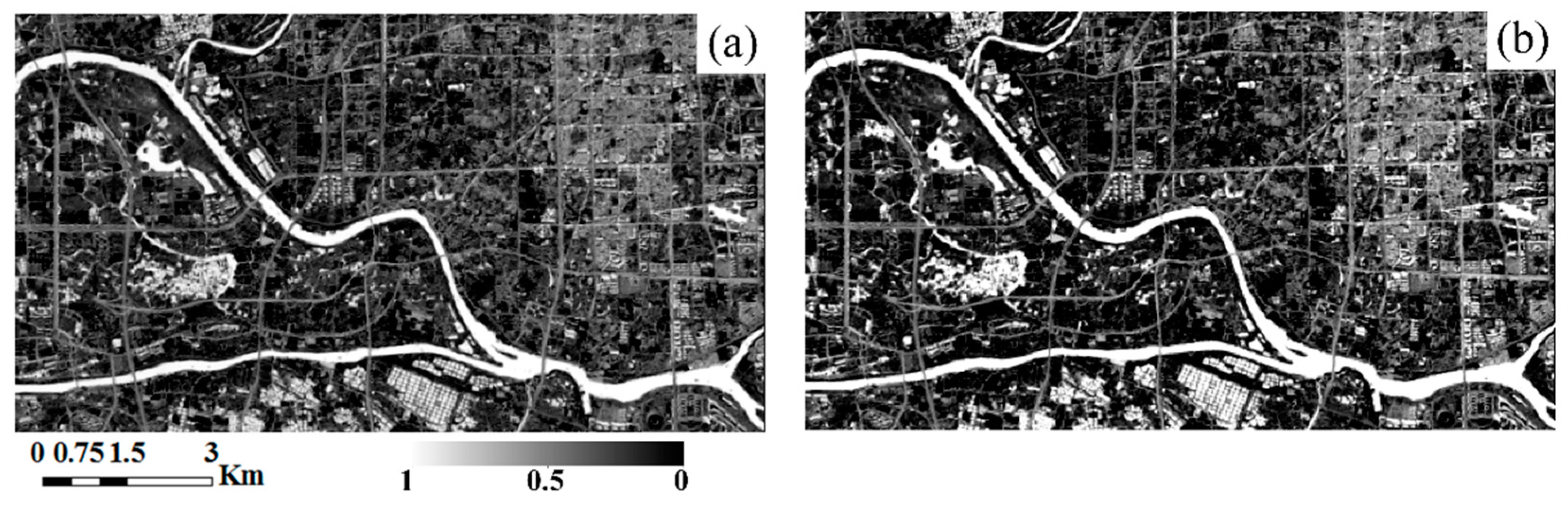
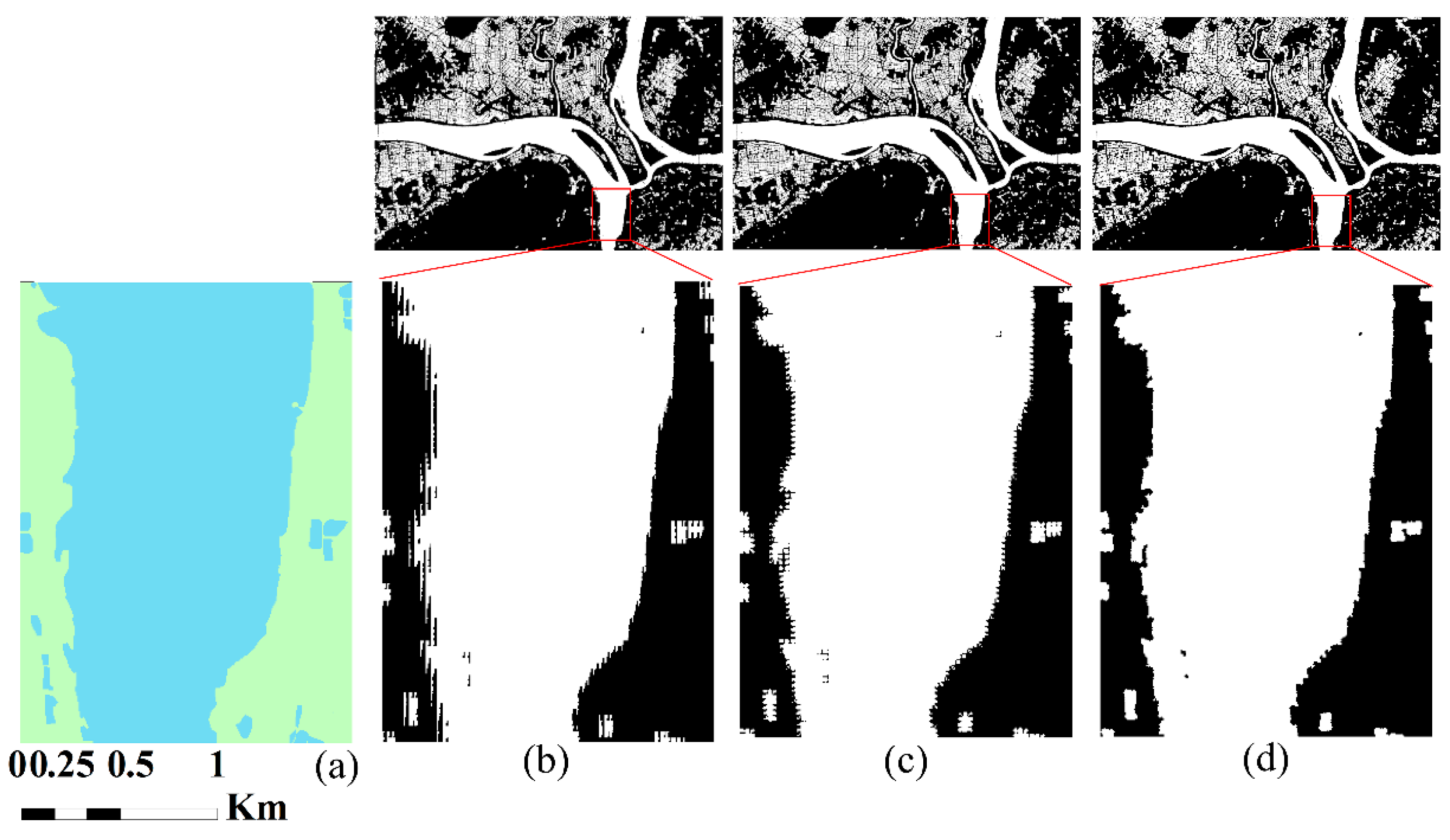
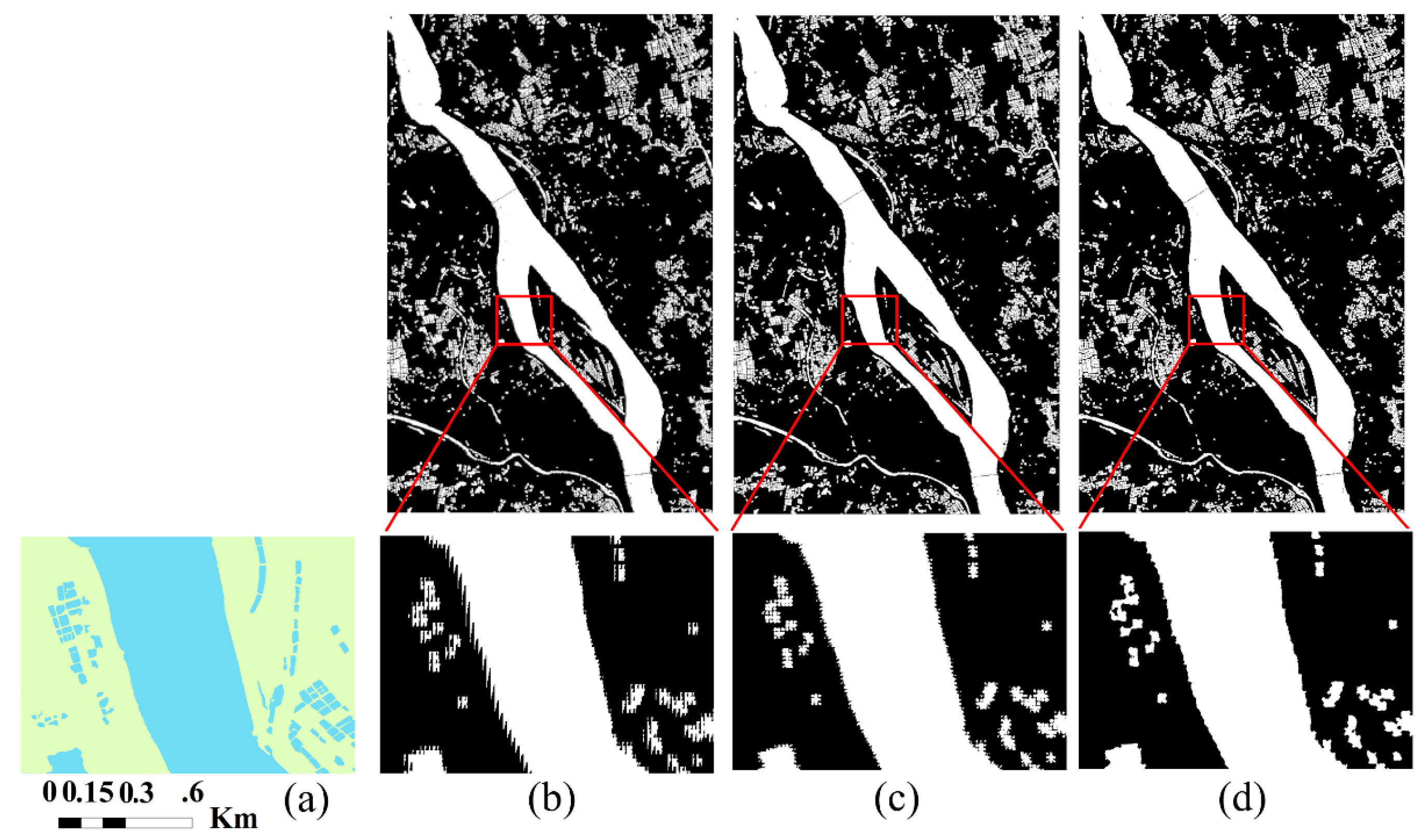
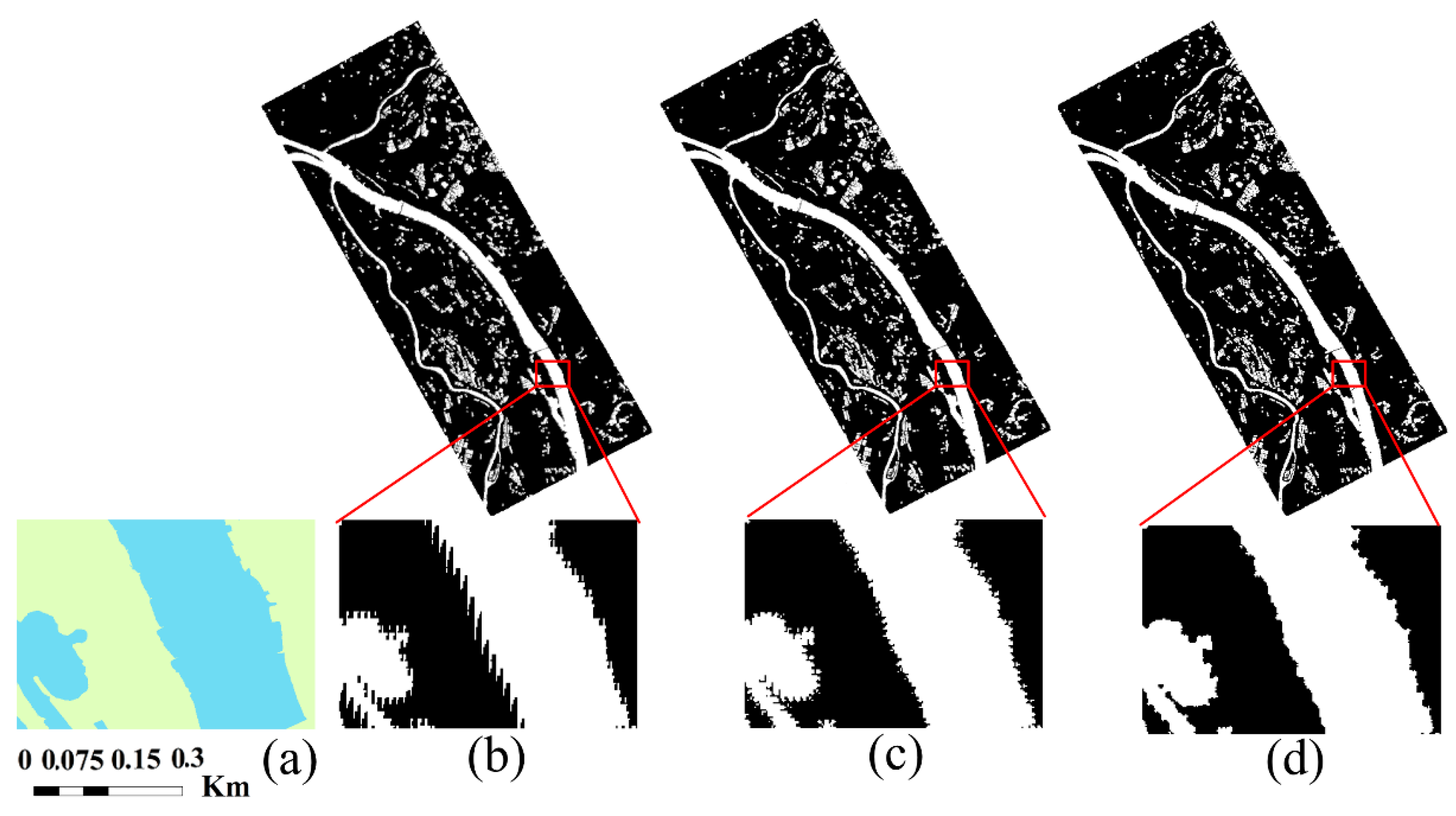
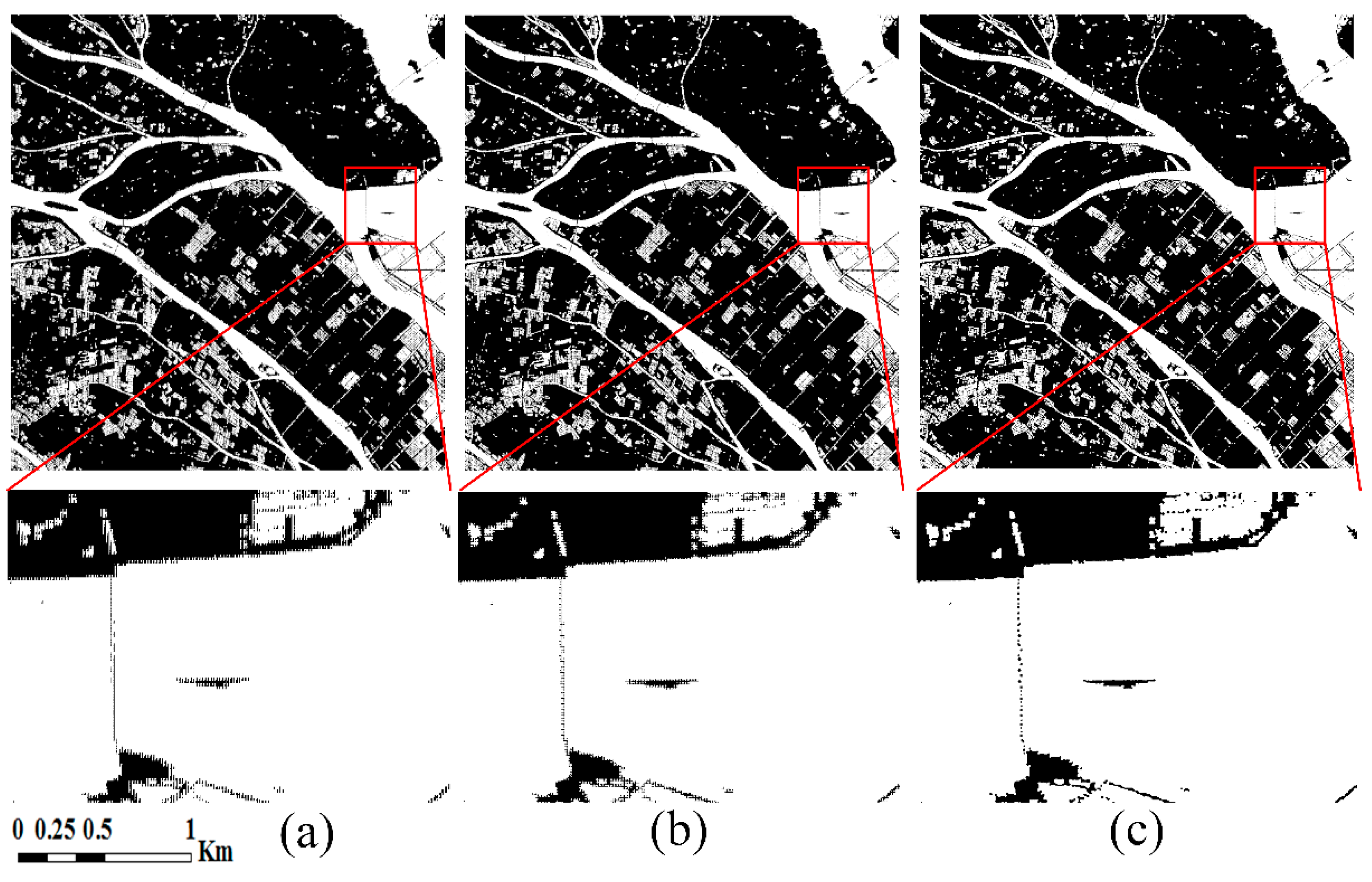
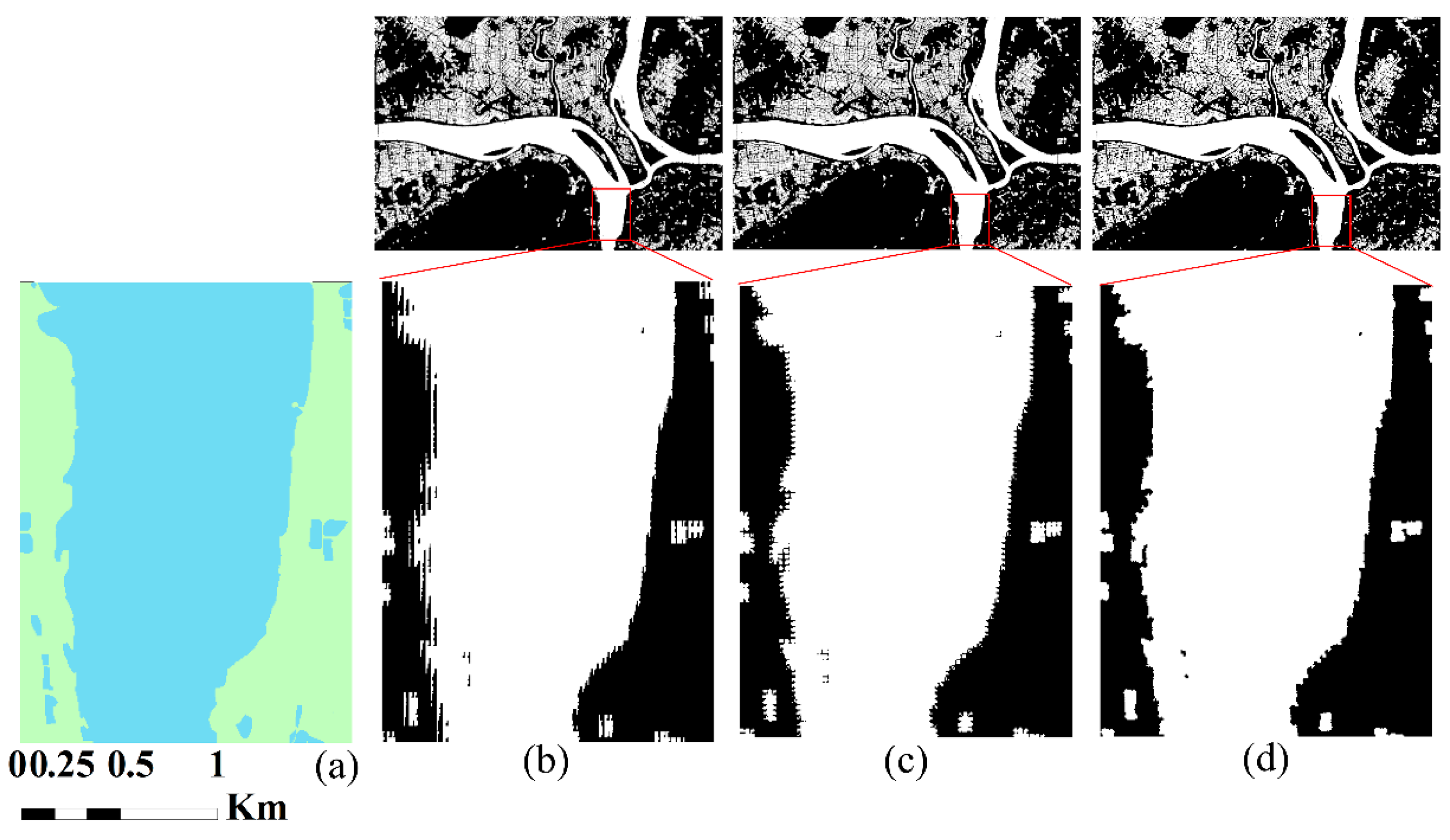
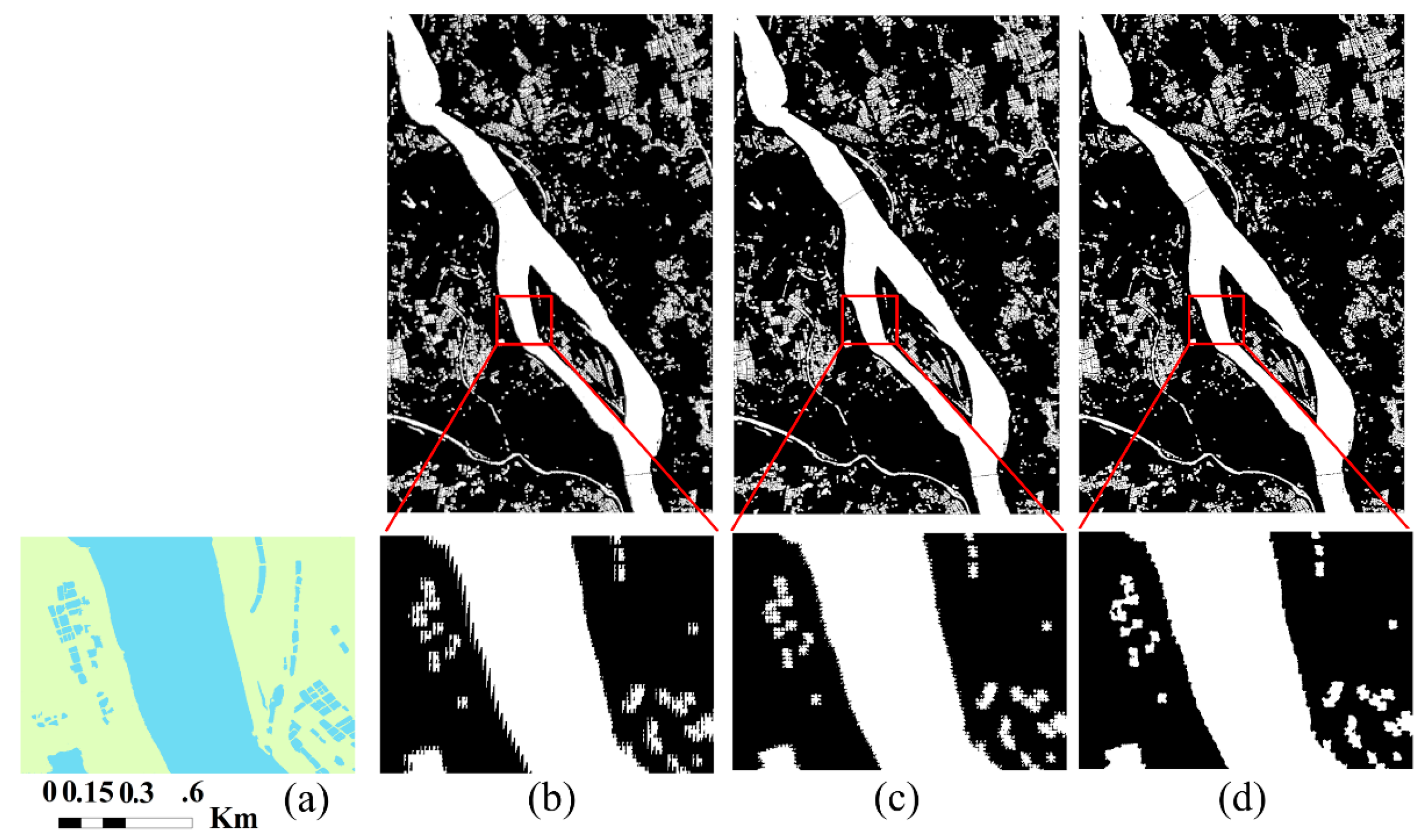
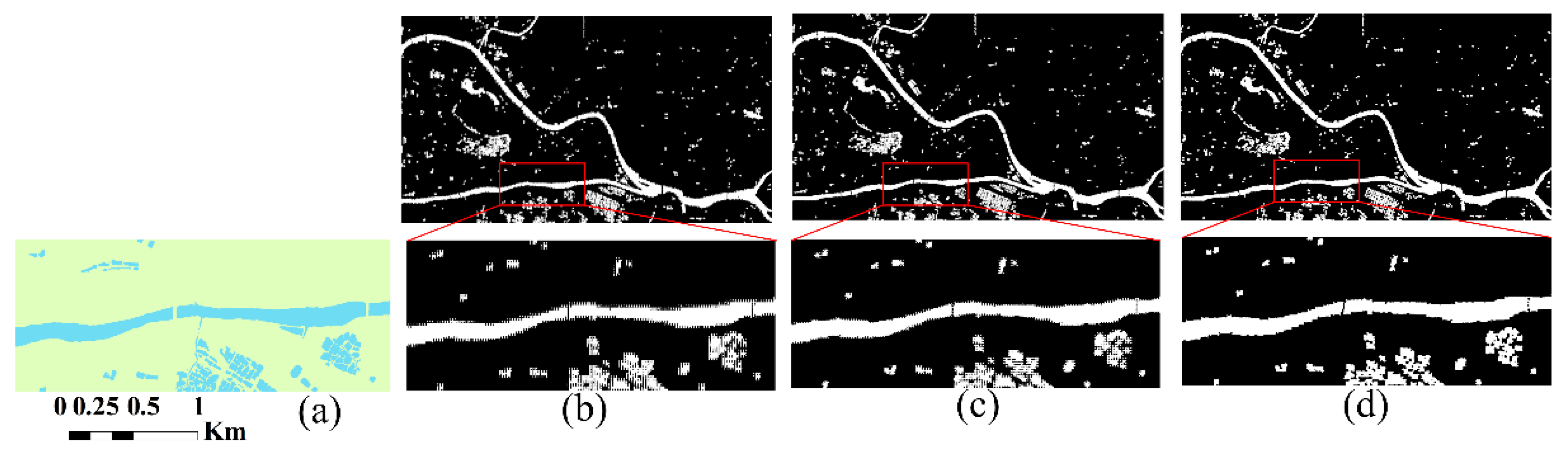
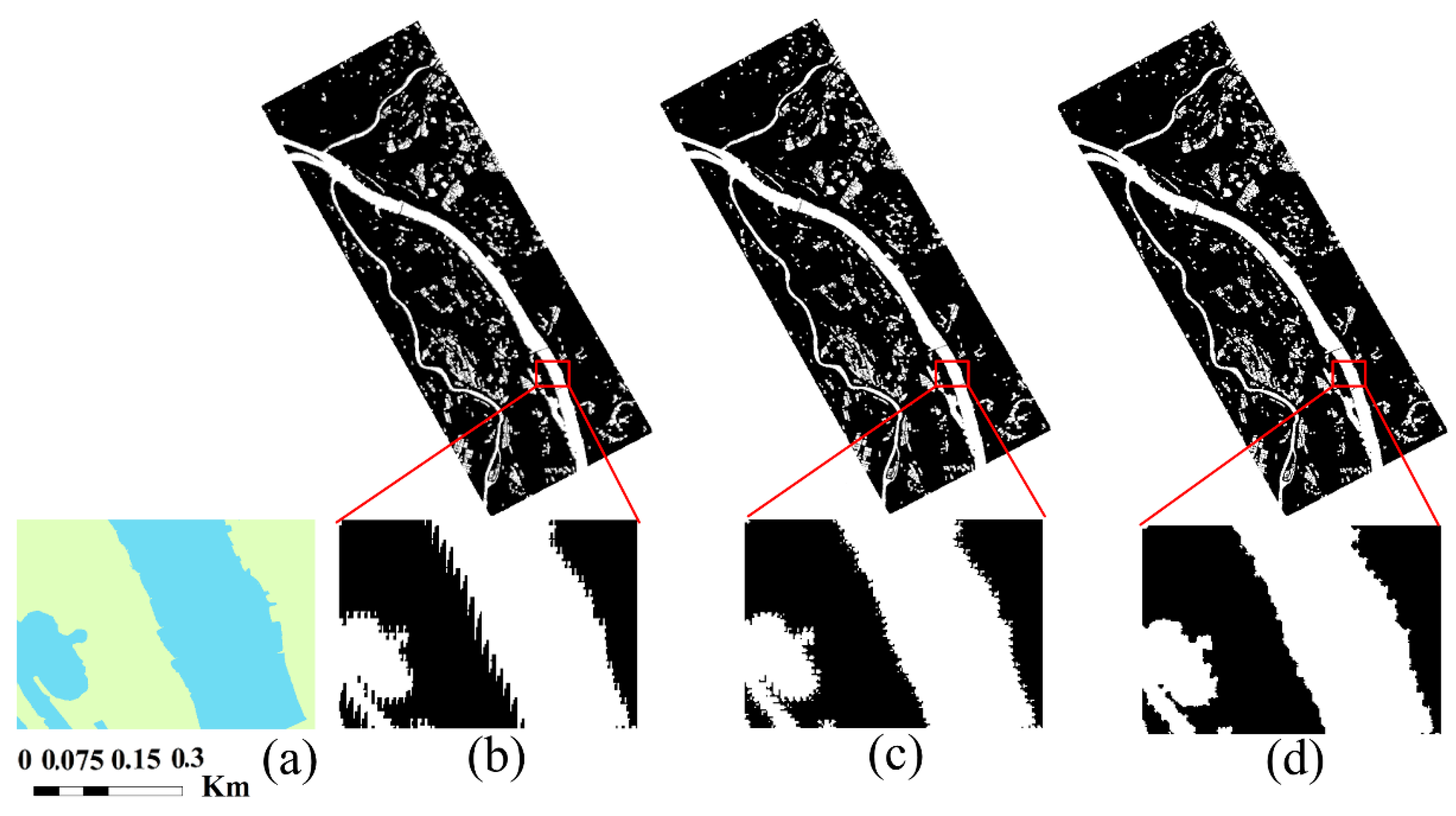
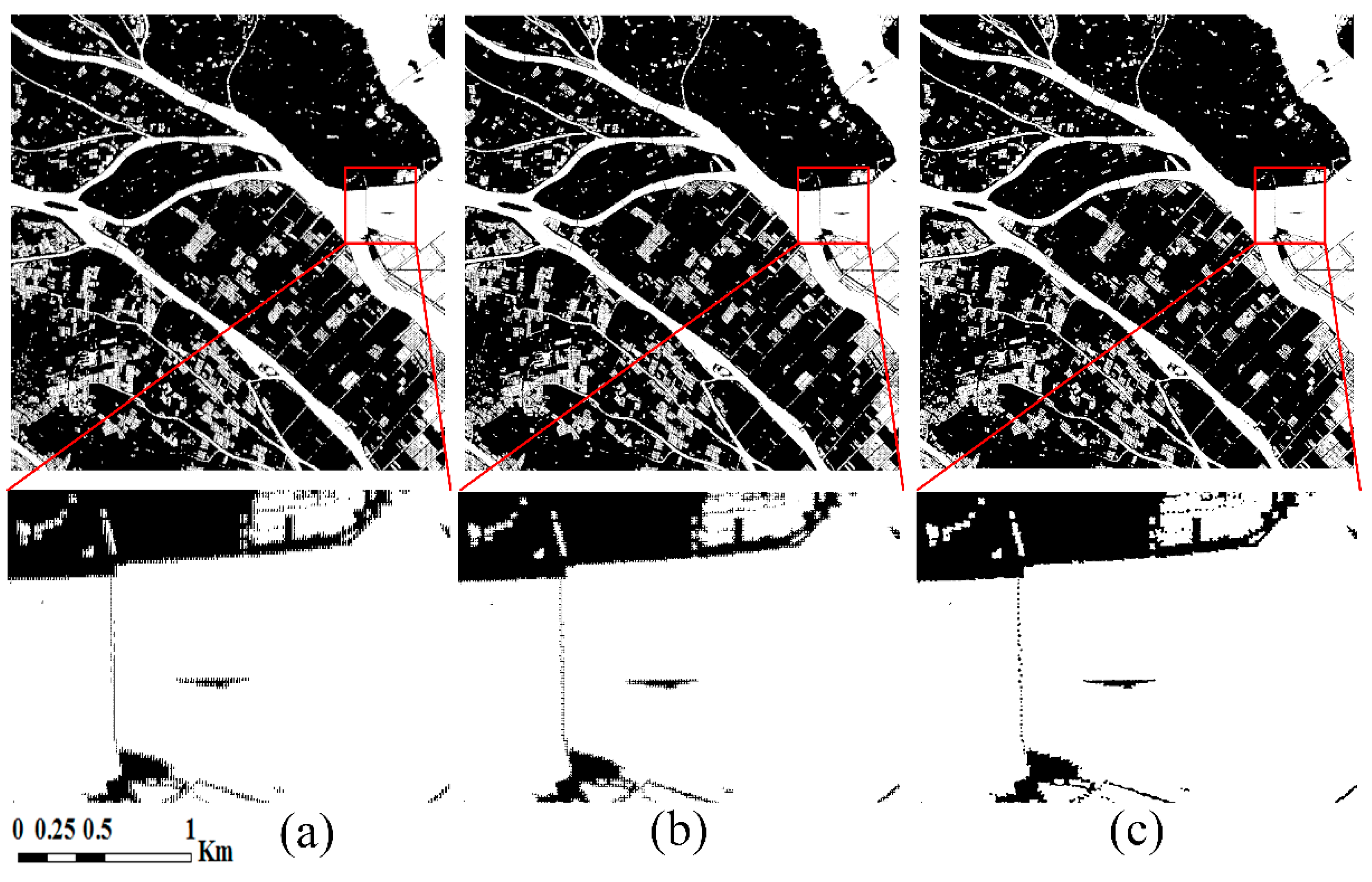
4.3. Comparison of Different Subpixel Water Mapping Methods
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Brabec, E.; Schulte, S.; Richards, P.L. Impervious surfaces and water quality: A review of current literature and its implications for watershed planning. J. Plan. Lit. 2002, 16, 499–514. [Google Scholar] [CrossRef]
- Xu, J.; Zhao, Y.; Zhong, K.; Ruan, H.; Liu, X. Coupling modified linear spectral mixture analysis and soil conservation service curve number (scs-cn) models to simulate surface runoff: Application to the main urban area of Guangzhou, China. Water 2016, 8, 550–567. [Google Scholar] [CrossRef]
- Atkinson, P.M. Mapping sub-pixel boundaries from remotely sensed images. Innov. GIS 1997, 4, 166–180. [Google Scholar]
- Verhoeye, J.; De Wulf, R. Land cover mapping at sub-pixel scales using linear optimization techniques. Remote Sens. Environ. 2002, 79, 96–104. [Google Scholar] [CrossRef]
- Atkinson, P.M. Sub-pixel target mapping from soft-classified, remotely sensed imagery. Photogramm. Eng. Remote Sens. 2005, 71, 839–846. [Google Scholar] [CrossRef]
- Shen, Z.; Qi, J.; Wang, K. Modification of pixel-swapping algorithm with initialization from a sub-pixel/pixel spatial attraction model. Photogramm. Eng. Remote Sens. 2009, 75, 557–567. [Google Scholar] [CrossRef]
- Xu, Y.; Huang, B. A spatio-temporal pixel-swapping algorithm for subpixel land cover mapping. IEEE Geosci. Remote Sens. Lett. 2014, 11, 474–478. [Google Scholar] [CrossRef]
- Thornton, M.; Atkinson, P.M.; Holland, D. Sub-pixel mapping of rural land cover objects from fine spatial resolution satellite sensor imagery using super-resolution pixel-swapping. Int. J. Remote Sens. 2006, 27, 473–491. [Google Scholar] [CrossRef]
- Mertens, K.C.; De Baets, B.; Verbeke, L.P.; De Wulf, R.R. A sub-pixel mapping algorithm based on sub-pixel/pixel spatial attraction models. Int. J. Remote Sens. 2006, 27, 3293–3310. [Google Scholar] [CrossRef]
- Mahmood, Z.; Akhter, M.A.; Thoonen, G.; Scheunders, P. Contextual subpixel mapping of hyperspectral images making use of a high resolution color image. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 779–791. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, L.; Liu, D. Integration of spatial attractions between and within pixels for sub-pixel mapping. J. Syst. Eng. Electron. 2012, 23, 293–303. [Google Scholar] [CrossRef]
- Lu, L.; Huang, Y.; Di, L.; Hang, D. A new spatial attraction model for improving subpixel land cover classification. Remote Sens. 2017, 9, 360–375. [Google Scholar] [CrossRef]
- Kasetkasem, T.; Arora, M.K.; Varshney, P.K. Super-resolution land cover mapping using a markov random field based approach. Remote Sens. Environ. 2005, 96, 302–314. [Google Scholar] [CrossRef]
- Li, X.; Du, Y.; Ling, F. Super-resolution mapping of forests with bitemporal different spatial resolution images based on the spatial-temporal markov random field. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 29–39. [Google Scholar]
- Wang, L.; Wang, Q. Subpixel mapping using markov random field with multiple spectral constraints from subpixel shifted remote sensing images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 598–602. [Google Scholar] [CrossRef]
- Tatem, A.J.; Lewis, H.G.; Atkinson, P.M.; Nixon, M.S. Super-resolution target identification from remotely sensed images using a hopfield neural network. IEEE Trans. Geosci. Remote Sens. 2001, 39, 781–796. [Google Scholar] [CrossRef]
- Wang, Q.; Atkinson, P.M.; Shi, W. Fast subpixel mapping algorithms for subpixel resolution change detection. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1692–1706. [Google Scholar] [CrossRef]
- Ling, F.; Du, Y.; Xiao, F.; Xue, H.; Wu, S. Super-resolution land-cover mapping using multiple sub-pixel shifted remotely sensed images. Int. J. Remote Sens. 2010, 31, 5023–5040. [Google Scholar] [CrossRef]
- Wang, Q.; Shi, W.; Atkinson, P.M.; Li, Z. Land cover change detection at subpixel resolution with a hopfield neural network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1339–1352. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, K.; Zhong, Y.; Li, P. A new sub-pixel mapping algorithm based on a bp neural network with an observation model. Neurocomputing 2008, 71, 2046–2054. [Google Scholar] [CrossRef]
- Nigussie, D.; Zurita-Milla, R.; Clevers, J. Possibilities and limitations of artificial neural networks for subpixel mapping of land cover. Int. J. Remote Sens. 2011, 32, 7203–7226. [Google Scholar] [CrossRef]
- Atkinson, P. Super-resolution land cover classification using the two-point histogram. In Geoenv Iv—Geostatistics for Environmental Applications; Springer: Berlin, Germany, 2004; pp. 15–28. [Google Scholar]
- Boucher, A.; Kyriakidis, P.C. Super-resolution land cover mapping with indicator geostatistics. Remote Sens. Environ. 2006, 104, 264–282. [Google Scholar] [CrossRef]
- Wang, Q.; Shi, W.; Wang, L. Indicator cokriging-based subpixel land cover mapping with shifted images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 327–339. [Google Scholar] [CrossRef]
- Jin, H.; Mountrakis, G.; Li, P. A super-resolution mapping method using local indicator variograms. Int. J. Remote Sens. 2012, 33, 7747–7773. [Google Scholar] [CrossRef]
- Li, L.; Chen, Y.; Xu, T.; Huang, C.; Liu, R.; Shi, K. Integration of bayesian regulation back-propagation neural network and particle swarm optimization for enhancing sub-pixel mapping of flood inundation in river basins. Remote Sens. Lett. 2016, 7, 631–640. [Google Scholar] [CrossRef]
- Li, L.; Xu, T.; Chen, Y. Improved urban flooding mapping from remote sensing images using generalized regression neural network-based super-resolution algorithm. Remote Sens. 2016, 8, 625. [Google Scholar] [CrossRef]
- Muslim, A.M.; Foody, G.M.; Atkinson, P.M. Localized soft classification for super-resolution mapping of the shoreline. Int. J. Remote Sens. 2006, 27, 2271–2285. [Google Scholar] [CrossRef]
- Foody, G.M.; Muslim, A.M.; Atkinson, P.M. Super-resolution mapping of the waterline from remotely sensed data. Int. J. Remote Sens. 2007, 26, 5381–5392. [Google Scholar] [CrossRef]
- Ling, F.; Xiao, F.; Du, Y.; Xue, H.; Ren, X. Waterline mapping at the subpixel scale from remote sensing imagery with high-resolution digital elevation models. Int. J. Remote Sens. 2008, 29, 1809–1815. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, S.-L. Super-resolution mapping of coastline with remotely sensed data and geostatistics. J. Remote Sens. 2010, 14, 148–164. [Google Scholar]
- Ge, Y.; Chen, Y.; Stein, A.; Li, S.; Hu, J. Enhanced subpixel mapping with spatial distribution patterns of geographical objects. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2356–2370. [Google Scholar] [CrossRef]
- Adams, J.B.; Sabol, D.E.; Roberts, D.A.; Smith, M.O.; Gillespie, A.R.; Kapos, V.; Filho, R.A. Classification of multispectral images based on fractions of endmembers: Application to land-cover change in the brazilian amazon. Remote Sens. Environ. 1995, 52, 137–154. [Google Scholar] [CrossRef]
- Xie, H.; Luo, X.; Xu, X.; Pan, H.; Tong, X. Automated subpixel surface water mapping from heterogeneous urban environments using landsat 8 oli imagery. Remote Sens. 2016, 8, 584. [Google Scholar] [CrossRef]
- Sun, D.; Yu, Y.; Goldberg, M.D. Deriving water fraction and flood maps from modis images using a decision tree approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 814–825. [Google Scholar] [CrossRef]
- Olthof, I.; Fraser, R.; Schmitt, C.C. Landsat-based mapping of thermokarst lake dynamics on the tuktoyaktuk coastal plain, northwest territories, Canada since 1985. Remote Sens. Environ. 2015, 168, 194–204. [Google Scholar] [CrossRef]
- Ma, B.D.; Wu, L.; Zhang, X.; Li, X.; Liu, Y.; Wang, S. Locally adaptive unmixing method for lake-water area extraction based on modis 250 m bands. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 109–118. [Google Scholar] [CrossRef]
- Pardopascual, J.E.; Almonacidcaballer, J.; Ruiz, L.A.; Palomarvazquez, J. Automatic extraction of shorelines from landsat tm and etm+ multi-temporal images with subpixel precision. Remote Sens. Environ. 2012, 123, 1–11. [Google Scholar] [CrossRef]
- Muslim, A.M.; Foody, G.M.; Atkinson, P.M. Shoreline mapping from coarse–spatial resolution remote sensing imagery of seberang takir, malaysia. J. Coast. Res. 2009, 236, 1399–1408. [Google Scholar] [CrossRef]
- Fan, F.; Fan, W.; Weng, Q. Improving urban impervious surface mapping by linear spectral mixture analysis and using spectral indices. Can. J. Remote Sens. 2015, 41, 577–586. [Google Scholar] [CrossRef]
- Wang, X.; Liao, J.; Zhang, J.; Shen, C.; Chen, W.; Xia, B.; Wang, T. A numeric study of regional climate change induced by urban expansion in the pearl river delta, china. J. Appl. Meteorol. Climatol. 2014, 53, 346–362. [Google Scholar] [CrossRef]
- USGS (United States Geological Survey). Product Guide: Landsat 8 Surface Reflectance Code (lasrc) Product; Department of the Interior, U.S. Geological Survey: Reston, VA, USA, 2017.
- Laben, C.A.; Brower, B.V. Process for Enhancing the Spatial Resolution of Multispectral Imagery using Pan-Sharpening. U.S. Patent 6,011,875, 4 January 2000. [Google Scholar]
- Ghassemian, H. A review of remote sensing image fusion methods. Inf. Fusion 2016, 32, 75–89. [Google Scholar] [CrossRef]
- Yuhendram; Alimuddin, I.; Sumantyo, J.T.S.; Kuze, H. Assessment of pan-sharpening methods applied to image fusion of remotely sensed multi-band data. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 165–175. [Google Scholar]
- Xing, Y.; Liu, X.; Song, Y.; Peng, J. Research on fusion method comparison and analysis for domestic high resolution satellite images. J. Cent. South Univ. For. Technol. 2016, 36, 83–88. [Google Scholar]
- Fu, B.; Wang, Y.; Campbell, A.; Li, Y.; Zhang, B.; Yin, S.; Xing, Z.; Jin, X. Comparison of object-based and pixel-based Random Forest algorithm for wetland vegetation mapping using high spatial resolution GF-1 and SAR data. Ecol. Indic. 2017, 73, 105–117. [Google Scholar] [CrossRef]
- Mcfeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Du, Z.; Li, W.; Zhou, D.; Tian, L.; Ling, F.; Wang, H.; Gui, Y.; Sun, B. Analysis of landsat-8 oli imagery for land surface water mapping. Remote Sens. Lett. 2014, 5, 672–681. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Li, W.; Du, Z.; Ling, F.; Zhou, D.; Wang, H.; Gui, Y.; Sun, B.; Zhang, X. A comparison of land surface water mapping using the normalized difference water index from tm, etm+ and ali. Remote Sens. 2013, 5, 5530–5549. [Google Scholar] [CrossRef]
- Tan, K.; Jin, X.; Du, Q.; Du, P. Modified multiple endmember spectral mixture analysis for mapping impervious surfaces in urban environments. J. Appl. Remote Sens. 2014, 8. [Google Scholar] [CrossRef]
- Qunming, W. Research on Sub-Pixel Mapping and its Related Techniques for Remote Sensing Imagery; Harbin Institute of Technology: Harbin, China, 2012. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Method | Whole Reference Image | Mixed Pixels in Reference Image | ||
|---|---|---|---|---|---|
| Overall Accuracy (OA, %) | Kappa Coefficient (κ) | Overall Accuracy (OA, %) | Kappa Coefficient (κ) | ||
| A | MSWM | 97.10% | 0.94 | 80.89% | 0.59 |
| SPML | 96.46% | 0.92 | 70.72% | 0.42 | |
| SPSAM | 96.86% | 0.93 | 77.39% | 0.52 | |
| B | MSWM | 95.35% | 0.90 | 80.78% | 0.60 |
| SPML | 93.92% | 0.87 | 65.97% | 0.30 | |
| SPSAM | 94.85% | 0.89 | 75.58% | 0.50 | |
| C | MSWM | 95.69% | 0.84 | 76.23% | 0.52 |
| SPML | 94.18% | 0.78 | 62.30% | 0.24 | |
| SPSAM | 95.05% | 0.82 | 70.30% | 0.40 | |
| D | MSWM | 97.24% | 0.94 | 82.58% | 0.60 |
| SPML | 95.85% | 0.92 | 70.96% | 0.33 | |
| SPSAM | 96.78% | 0.94 | 78.51% | 0.50 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Deng, R.; Xu, J.; Zhang, F. Coupling the Modified Linear Spectral Mixture Analysis and Pixel-Swapping Methods for Improving Subpixel Water Mapping: Application to the Pearl River Delta, China. Water 2017, 9, 658. https://doi.org/10.3390/w9090658
Liu X, Deng R, Xu J, Zhang F. Coupling the Modified Linear Spectral Mixture Analysis and Pixel-Swapping Methods for Improving Subpixel Water Mapping: Application to the Pearl River Delta, China. Water. 2017; 9(9):658. https://doi.org/10.3390/w9090658
Chicago/Turabian StyleLiu, Xulong, Ruru Deng, Jianhui Xu, and Feifei Zhang. 2017. "Coupling the Modified Linear Spectral Mixture Analysis and Pixel-Swapping Methods for Improving Subpixel Water Mapping: Application to the Pearl River Delta, China" Water 9, no. 9: 658. https://doi.org/10.3390/w9090658