1. Introduction
Synchronization is a dynamical process where two or more interacting oscillatory systems end up with identical movement. In 1665, Huygens experimented with maritime pendulum clocks and discovered the anti-phase synchronization of two pendulum clocks mounted on the common frame [
1]. Since then, synchronization has become a basic concept in nonlinear and complex systems [
2]. Such systems include, but are not limited to, musical instruments, electric power systems, and lasers. There are numerous applications in mechanical [
3] and electrical [
4] engineering. New applications are found in mathematical biology such as synchronous variation of cell nuclei, firing of neurons, forms of cooperative behavior of animals and humans [
5].
Recently, Huygen’s experiment has been widely discussed and several experimental devices were built [
6,
7,
8]. It was shown that two real mechanical clocks when mounted to a horizontally moving beam can synchronize both in-phase and anti-phase [
9]. In all these experiments synchronization was achieved due to energy transfer via the oscillating beam, supporting Huygen’s intuition [
6].
One of the rapidly developing areas in between physics and mathematics, is the topic of
-symmetry, which has started as a way to characterize non-Hermitian Hamiltonians in quantum mechanics [
10]. The key idea is that a linear Schrödinger operator with a complex-valued potential, which is symmetric with respect to combined parity (
) and time-reversal (
) transformations, may have a real spectrum up to a certain critical value of the complex potential amplitude. In nonlinear systems, this distinctive feature may lead to existence of breathers (time-periodic solutions localized in space) as continuous families of their energy parameter.
The most basic configuration having
symmetry is a dimer, which represents a system of two coupled oscillators, one of which has damping losses and the other one gains some energy from external sources. This configuration was studied in numerous laboratory experiments involving electric circuits [
11], superconductivity [
12], optics [
13,
14] and microwave cavities [
15].
In the context of synchronization of coupled oscillators in a
-symmetric system, one of the recent experiments was performed by Bender et al. [
16]. These authors considered a
-symmetric Hamiltonian system describing the motion of two coupled pendula whose bases were connected by a horizontal rope which moves periodically in resonance with the pendula. The phase transition phenomenon, which is typical for
-symmetric systems, happens when some of the real eigenvalues of the complex-valued Hamiltonian become complex. The latter regime is said to have
broken symmetry.
On the analytical side, dimer equations were found to be completely integrable [
17,
18]. Integrability of dimers is obtained by using Stokes variables and it is lost when more coupled nonlinear oscillators are added into a
-symmetric system. Nevertheless, it was understood recently [
19,
20] that there is a remarkable class of
-symmetric dimers with cross-gradient Hamiltonian structure, where the real-valued Hamiltonians exist both in finite and infinite chains of coupled nonlinear oscillators. Analysis of synchronization in the infinite chains of coupled oscillators in such class of models is a subject of this work.
In the rest of this section, we describe how this paper is organized. We also describe the main findings obtained in this work.
Section 2 introduces the main model of coupled pendula driven by a resonant periodic movement of their common strings. See
Figure 1 for a schematic picture. By using an asymptotic multi-scale method, the oscillatory dynamics of coupled pendula is reduced to a
-symmetric discrete nonlinear Schrödinger (dNLS) equation with gains and losses. This equation generalizes the dimer equation derived in [
16,
20].
Section 3 describes symmetries and conserved quantities for the
-symmetric dNLS equation. In particular, we show that the cross-gradient Hamiltonian structure obtained in [
19,
20] naturally appears in the asymptotic reduction of the original Hamiltonian structure of Newton’s equations of motion for the coupled pendula.
Section 4 is devoted to characterization of breathers, which are time-periodic solutions localized in the chain with the frequency parameter
E and the amplitude parameter
A. We show that depending on parameters of the model (such as detuning frequency, coupling constant, driving force amplitude), there are three possible types of breather solutions. For the first type, breathers of small and large amplitudes
A are connected to each other and do not extend to symmetric synchronized oscillations of coupled pendula. In the second and third types, large-amplitude and small-amplitude breathers are connected to the symmetric synchronized oscillations but are not connected to each other. See
Figure 2 with branches (a), (b), and (c), where the symmetric synchronized oscillations correspond to the value
.
Section 5 contains a routine analysis of linear stability of the zero equilibrium, where the phase transition threshold to the broken
-symmetry phase is explicitly found. Breathers are only studied for the parameters where the zero equilibrium is linearly stable.
Section 6 explores the Hamiltonian structure of the
-symmetric dNLS equation and characterizes breathers obtained in
Section 4 from their energetic point of view. We show that the breathers for large value of frequency
E appear to be saddle points of the Hamiltonian function between continuous spectra of positive and negative energy, similar to the standing waves in the Dirac models. Therefore, it is not clear from the energetic point of view if such breathers are linearly or nonlinearly stable. On the other hand, we show that the breathers for smaller values of frequency
E appear to be saddle points of the Hamiltonian function with a negative continuous spectrum and finitely many (either three or one) positive eigenvalues.
Section 7 is devoted to analysis of spectral and orbital stability of breathers. For spectral stability, we use the limit of small coupling constant between the oscillators (the same limit is also used in
Section 4 and
Section 6) and characterize eigenvalues of the linearized operator. The main analytical results are also confirmed numerically. See
Figure 3 for the three types of breathers. Depending on the location of the continuous spectral bands relative to the location of the isolated eigenvalues, we are able to prove nonlinear orbital stability of breathers for branches (b) and (c). We are also able to characterize instabilities of these types of breathers that emerge depending on parameters of the model. Regarding branch (a), nonlinear stability analysis is not available by using the energy method. Our follow-up work [
21] develops a new method of analysis to prove the long-time stability of breathers for branch (a).
The summary of our findings is given in the concluding
Section 8, where the main results are shown in the form of
Table 1.
2. Model
A simple yet universal model widely used to study coupled nonlinear oscillators is the Frenkel-Kontorova (FK) model [
22]. It describes a chain of classical particles coupled to their neighbors and subjected to a periodic on-site potential. In the continuum approximation, the FK model reduces to the sine-Gordon equation, which is exactly integrable. The FK model is known to describe a rich variety of important nonlinear phenomena, which find applications in solid-state physics and nonlinear science [
23].
We consider here a two-array system of coupled pendula, where each pendulum is connected to the nearest neighbors by linear couplings.
Figure 1 shows schematically that each array of pendula is connected in the longitudinal direction by the torsional springs, whereas each pair of pendula is connected in the transverse direction by a common string. Newton’s equations of motion are given by
where
correspond to the angles of two arrays of pendula, dots denote derivatives of angles with respect to time
t, and the positive parameters
C and
D describe couplings between the two arrays in the longitudinal and transverse directions, respectively. The type of coupling between the two pendula with the angles
and
is referred to as the
direct coupling between nonlinear oscillators (see Section 8.2 in [
5]).
We consider oscillatory dynamics of coupled pendula under the following assumptions.
- (A1)
The coupling parameters C and D are small. Therefore, we can introduce a small parameter μ such that both C and D are proportional to .
- (A2)
A resonant periodic force is applied to the common strings for each pair of coupled pendula. Therefore, D is considered to be proportional to , where ω is selected near the unit frequency of linear pendula indicating the parametric resonance between the force and the pendula.
Mathematically, we impose the following representation for parameters
C and
:
where
are
μ-independent parameters, whereas
μ is the formal small parameter to characterize the two assumptions (A1) and (A2).
In the formal limit
, the pendula are uncoupled, and their small-amplitude oscillations can be studied with the asymptotic multi-scale expansion
where
are amplitudes for nearly harmonic oscillations and
are remainder terms. In a similar context of single-array coupled nonlinear oscillators, it is shown in [
24] how the asymptotic expansions (
3) can be justified. From the conditions that the remainder terms
remain bounded as the system evolves, the amplitudes
are shown to satisfy the discrete nonlinear Schrödinger (dNLS) equations, which bring together all the phenomena affecting the nearly harmonic oscillations (such as cubic nonlinear terms, the detuning frequency, the coupling between the oscillators, and the amplitude of the parametric driving force). A similar derivation for a single pair of coupled pendula is reported in [
20].
Using the algorithm in [
24] and restricting the scopes of this derivation to the formal level, we write the truncated system of equations for the remainder terms:
where
and
are uniquely defined. Bounded solutions to the linear inhomogeneous Equation (
4) exist if and only if
for every
. Straightforward computations show that the conditions
are equivalent to the following evolution equations for slowly varying amplitudes
:
The System (
5) takes the form of coupled parametrically forced dNLS equations. There exists an invariant reduction of System (
5) given by
to the scalar parametrically forced dNLS equation. Existence and stability of breathers in such scalar dNLS equations was considered numerically by Susanto et al. in [
25,
26].
The Reduction (
6) corresponds to the symmetric synchronized oscillations of coupled pendula of the Model (
1) with
In what follows, we consider a more general class of synchronized oscillations of coupled pendula of the Model (
1). The solutions we consider also generalize the breather solutions of the coupled parametrically forced dNLS Equation (
5).
When
, the System (
5) is equivalent to an uncoupled system of dNLS equations, which have many applications in physics, including nonlinear optics. In the optics context, the system describes two arrays of optical waveguides with Kerr nonlinearity and nearest-neighbor interactions (see the review and references in [
27]). The
γ term realizes a cross-phase linear coupling between the two arrays of optical waveguides. This type of coupling occurs typically due to parametric resonance in the optical systems (see [
28] and references therein).
The System (
5) can be cast to the form of the parity–time reversal (
) dNLS equations [
20]. Using the variables
the System (
5) is rewritten in the equivalent form
which is the starting point for our analytical and numerical work. The invariant Reduction (
6) for System (
5) becomes
Without loss of generality, one can scale parameters Ω,
ϵ, and
γ by a factor of two in order to eliminate the numerical factors in the System (
9). Also in the context of hard nonlinear oscillators (e.g., in the framework of the
theory), the cubic nonlinearity may have the opposite sign compared to the one in the System (
9). However, given the applied context of the system of coupled pendula, we will stick to the specific form given by Equation (
9) in further analysis.
3. Symmetries and Conserved Quantities
The System (
9) is referred to as the
-symmetric dNLS equation because the solutions remain invariant with respect to the action of the parity
and time-reversal
operators given by
The parameter
γ introduces the gain–loss coefficient in each pair of coupled oscillators due to the resonant periodic force. In the absence of all other effects, the
γ-term of the first equation of System (
9) induces the exponential growth of amplitude
, whereas the
γ-term of the second equation induces the exponential decay of amplitude
, if
.
The System (
9) truncated at a single site (say
) is called the
-symmetric dimer. In the work of Barashenkov et al. [
20], it was shown that all
-symmetric dimers with physically relevant cubic nonlinearities represent Hamiltonian systems in appropriately introduced canonical variables. However, the
-symmetric dNLS equation on a lattice does not typically have a Hamiltonian form if
.
Nevertheless, the particular nonlinear functions arising in the System (
9) correspond to the
-symmetric dimers with a cross–gradient Hamiltonian structure [
20], where variables
are canonically conjugate. As a result, the System (
9) on the chain
has additional conserved quantities. This fact looked like a mystery in the recent works [
19,
20].
Here we clarify the mystery in the context of the derivation of the
-symmetric dNLS Equation (
9) from the original System (
1). Indeed, the System (
1) of classical Newton particles has a standard Hamiltonian structure with the energy function
Since the periodic movement of common strings for each pair of pendula result in the time-periodic coefficient
, the energy
is a periodic function of time
t. In addition, no other conserved quantities such as momenta exist typically in lattice differential systems such as the System (
1) due to broken continuous translational symmetry.
After the System (
1) is reduced to the coupled dNLS Equation (
5) with the asymptotic Expansion (
3), we can write the evolution Problem (
5) in the Hamiltonian form with the standard straight-gradient symplectic structure
where the time variable
t stands now for the slow time
and the energy function is
The energy function
is conserved in the time evolution of the Hamiltonian System (
13). In addition, there exists another conserved quantity
which is related to the gauge symmetry
with
for solutions to the System (
5).
When the transformation of Variables (
8) is used, the
-symmetric dNLS Equation (
9) is cast to the Hamiltonian form with the cross-gradient symplectic structure
where the energy function is
The gauge-related function is written in the form
The functions
and
are conserved in the time evolution of the System (
9). These functions follow from Equations (
14) and (
15) after the Transformation (
8) is used. Thus, the cross-gradient Hamiltonian structure of the
-symmetric dNLS Equation (
9) is inherited from the Hamiltonian structure of the coupled oscillator Model (
1).
4. Breathers (Time-Periodic Solutions)
We characterize the existence of breathers supported by the
-symmetric dNLS Equation (
9). In particular, breather solutions are continued for small values of coupling constant
ϵ from solutions of the dimer equation arising at a single site, say the central site at
. We shall work in a sequence space
of square integrable complex-valued sequences.
Time-periodic solutions to the
-symmetric dNLS Equation (
9) are given in the form [
29,
30]:
where the frequency parameter
E is considered to be real, the factor
is introduced for convenience, and the sequence
is time-independent. The Breather (
19) is a localized mode if
, which implies that
as
. The Breather (
19) is considered to be
-symmetric with respect to the operators in Equation (
11) if
.
The Reduction (
10) for symmetric synchronized oscillations is satisfied if
The time-periodic Breathers (
19) with
generalize the class of symmetric synchronized Oscillations (
20).
The time-independent sequence
can be found from the stationary
-symmetric dNLS equation:
The
-symmetric breathers with
satisfy the following scalar difference equation
Note that the Reduction (
20) is compatible with Equation (
22) in the sense that if
and
, then
R satisfies a real-valued difference equation.
Let us set
for now and consider solutions to the dimer equation at the central site
:
The parameters
γ and Ω are considered to be fixed, and the breather parameter
E is thought to parameterize continuous branches of solutions to the nonlinear algebraic Equation (
23). The solution branches depicted on
Figure 2 are given in the following lemma.
Lemma 1. Assume . The algebraic Equation (23) admits the following solutions depending on γ and Ω
:- (a)
- two symmetric unbounded branches exist for ,
- (b)
- an unbounded branch exists for every ,
- (c)
- a bounded branch exists for ,
where . Proof. Substituting the decomposition
with
and
into the algebraic Equation (
23), we obtain
Excluding
θ by using the fundamental trigonometric identity, we obtain the explicit parametrization of the solutions to the algebraic Equation (
23) by the amplitude parameter
A:
The zero-amplitude limit is reached if , in which case , where . If , the solution branches (if they exist) are bounded away from the zero solution.
Now we analyze the three cases of parameters
γ and Ω formulated in the lemma.
- (a)
If
, then the Parametrization (
25) yields a monotonically increasing map
because
In the two asymptotic limits, we obtain from Equation (
25):
See
Figure 2a.
- (b)
If
, the Parametrization (
25) yields a monotonically increasing map
, where
Indeed, we note that
and
so that the derivative in Equation (
26) is positive for every
. We have
See
Figure 2b.
- (c)
If
, then the Parametrization (
25) yields a monotonically decreasing map
, where
In Equation (
28), the first choice is made if
and the second choice is made if
. Both choices are the same if
. We note that
, therefore, the Derivative (
26) needs to be rewritten in the form
where
for both
and
. In the two asymptotic limits, we obtain from Equation (
25):
See
Figure 2c.
Note that branches (b) and (c) coexist for . ☐
Remark 1. The Reduction (20) corresponds to the choice:If , this choice corresponds to for , that is, the point on branch (c). If , it corresponds to for any , that is, the point on branch (b). Every solution of Lemma 1 can be extended to a breather on the chain
which satisfies the spatial symmetry condition in addition to the
symmetry:
In order to prove the existence of the symmetric breather solution to the difference Equation (
22), we use the following implicit function theorem.
Implicit Function Theorem (Theorem 4.E in [
31]).
Let and Z be Banach spaces and let be a map on an open neighborhood of the point . Assume thatand thatThere are and such that for each y with there exists a unique solution of the nonlinear equation with . Moreover, the map is near . With two applications of the implicit function theorem, we prove the following main result of this section.
Theorem 1. Fix , , and , where if . There exists sufficiently small and such that for every , there exists a unique solution to the difference Equation (22) satisfying the Symmetry (30) and the boundwhere A and θ are defined in Lemma 1. Moreover, the solution U is smooth in ϵ. Proof. In the first application of the implicit function theorem, we consider the following system of algebraic equations
where
is given, in addition to parameters
γ, Ω, and
E.
Let
,
,
,
, and
. Then, we have
and the Jacobian operator
is given by identical copies of the matrix
with the eigenvalues
. By the assumption of the lemma,
, so that the Jacobian operator
is one-to-one and onto. By the implicit function theorem, for every
and every
sufficiently small, there exists a unique small solution
of the System (
32) such that
where the positive constant
is independent from
ϵ and
.
Thanks to the symmetry of the difference Equation (
22), we find that
,
satisfy the same System (
32) for
, with the same unique solution.
In the second application of the implicit function theorem, we consider the following algebraic equation
where
depends on
,
γ, Ω, and
E, satisfies the Bound (
33), and is uniquely defined by the previous result.
Let
,
,
,
, and
. Then, we have
, where
A and
θ are defined in Lemma 1. The Jacobian operator
is given by the matrix
We show in Lemma 2 below that the matrix given by Equation (
35) is invertible under the conditions
and
. By the implicit function theorem, for every
sufficiently small, there exists a unique solution
to the algebraic Equation (
34) near
such that
where the positive constant
is independent from
ϵ. The Bound (
31) holds thanks to the Bounds (
33) and (
36). Since both Equations (
32) and (
34) are smooth in
ϵ, the solution
U is smooth in
ϵ. ☐
In the following result, we show that the matrix given by Equation (
35) is invertible for every branch of Lemma 1 with an exception of a single point
on branch (c) for
.
Lemma 2. With the exception of the point on branch (c) of Lemma 1 for , the matrix given by Equation (35) is invertible for every . Proof. The matrix given by Equation (
35) has zero eigenvalue if and only if its determinant is zero, which happens at
Eliminating
by using Parametrization (
25) and simplifying the algebraic equation for nonzero
, we reduce it to the form
We now check if this constraint can be satisfied for the three branches of Lemma 1.
- (a)
If
, the Constraint (
37) is not satisfied because the left-hand side
exceeds the right-hand side
.
- (b)
If
and
, where
is given by Equation (
27), the Constraint (
37) is not satisfied because the left-hand side
exceeds the left-hand side
both for
and for
.
- (c)
If
and
, where
is given by Equation (
28), the Constraint (
37) is not satisfied because the left-hand side is estimated by
In the first case, we have
, so that the left-hand side is strictly smaller than
. In the second case, we have
, so that the left-hand side is also strictly smaller than
. Only if
, the Constraint (
37) is satisfied at
, when
and
Hence, the Matrix (
35) is invertible for all parameter values with one exceptional case. ☐
Remark 2. In the asymptotic limit as , see Lemma 1, the Matrix (35) is expanded asymptotically aswith the two eigenvalues and . Thus, the matrix given by Equation (38) is invertible for every branch extending to sufficiently large values of E. 6. Variational Characterization of Breathers
It follows from Theorem 1 that each interior point on the solution branches shown on
Figure 2 generates a fundamental breather of the
-symmetric dNLS Equation (
9). We shall now characterize these breathers as relative equilibria of the energy function.
Thanks to the cross-gradient symplectic Structure (
16), the stationary
-symmetric dNLS Equation (
21) can be written in the gradient form
Keeping in mind the additional conserved quantity
given by Equation (
18), we conclude that the stationary solution
is a critical point of the combined energy function given by
If we want to apply the Lyapunov method in order to study nonlinear stability of stationary solutions in Hamiltonian systems, we shall investigate convexity of the second variation of the combined energy functional
at
. Using the expansion
,
and introducing extended variables Φ and
ϕ with the blocks
we can expand the smooth function
up to the quadratic terms in
ϕ:
where
is the self-adjoint (Hessian) operator defined on
and the scalar product was used in the following form:
Using Equations (
17) and (
18), the Hessian operator can be computed explicitly as follows
where blocks of
at each lattice node
are given by
and Δ is the discrete Laplacian operator applied to blocks of
ϕ at each lattice node
:
In the expression for
, we have used the
-symmetry condition
for the given stationary solution
.
We study convexity of the combined energy functional at . Since the zero equilibrium is linearly stable only for (if ), we only consider breathers of Theorem 1 for . In order to study eigenvalues of for small values of ϵ, we use the following perturbation theory.
Perturbation Theory for Linear Operators (Theorem VII.1.7 in [
32]).
Let be a family of bounded operators from Banach space X to itself, which depends analytically on the small parameter ϵ. If the spectrum of is separated into two parts, the subspaces of X corresponding to the separated parts also depend analytically on ϵ. In particular, the spectrum of is separated into two parts for any sufficiently small. With an application of the perturbation theory for linear operators, we prove the following main result of this section.
Theorem 2. Fix , Ω
, and E along branches of the -symmetric breathers given by Theorem 1 such that and , where . For every sufficiently small, the operator admits a one-dimensional kernel in spanned by the eigenvector due to the gauge invariance, where the blocks of the eigenvector are given byIn addition,If , the spectrum of in includes infinite-dimensional positive and negative parts.
If and , the spectrum of in includes an infinite-dimensional negative part and either three or one simple positive eigenvalues for branches (b) and (c) of Lemma 1 respectively.
Proof. If , the breather solution of Theorem 1 is given by for every and , where A and θ are defined by Lemma 1. In this case, the linear operator decouples into 4-by-4 blocks for each lattice node .
For
, the 4-by-4 block of the linear operator
is given by
Using Relations (
24) and (
25), as well as symbolic computations with MAPLE, we found that the 4-by-4 matrix block
admits a simple zero eigenvalue and three nonzero eigenvalues
,
, and
given by
For each branch of Lemma 1 with
and
, we have
, so that
. Furthermore, either
or
if and only if
Expanding this equation for nonzero
A yields Constraint (
37). With the exception of a single point
at
, we showed in Lemma 2 that the Constraint (
37) does not hold for any of the branches of Lemma 1. Therefore,
and
along each branch of Lemma 1 and the signs of
,
, and
for each branch of Lemma 1 can be obtained in the limit
for branches (a) and (b) or
for branch (c). By means of these asymptotic computations as
or
, we obtain the following results for the three branches shown on
Figure 2:
- (a)
.
- (b)
.
- (c)
, , and .
For
, the 4-by-4 block of the linear operator
is given by
Each block has two double eigenvalues
and
given by
Since there are infinitely many nodes with
, the points
and
have infinite multiplicity in the spectrum of the linear operator
. Furthermore, we can sort up the signs of
and
for each point on the three branches shown on
Figure 2:
- (1),(3)
If , then and .
- (2),(4)
If and , then .
By using the perturbation theory for linear operators, we argue as follows:
Since is Hermitian on , its spectrum is a subset of the real line for every .
The zero eigenvalue persists with respect to
at zero because the Eigenvector (
47) belongs to the kernel of
due to the gauge invariance for every
.
The other eigenvalues of are isolated away from zero. The spectrum of is continuous with respect to ϵ and includes infinite-dimensional parts near points and for small (which may include continuous spectrum and isolated eigenvalues) as well as simple eigenvalues near (if are different from ).
The statement of the theorem follows from the perturbation theory and the count of signs of and above. ☐
Remark 4. In the asymptotic limit as , we can sort out eigenvalues of asymptotically as:where the remainder terms are as . The values , , and are close to each other as . Remark 5. It follows from Theorem 2 that for , the breather is a saddle point of the energy functional with infinite-dimensional positive and negative invariant subspaces of the Hessian operator . This is very similar to the Hamiltonian systems of the Dirac type, where stationary states are located in the gap between the positive and negative continuous spectrum. This property holds for points 1 and 3 on branches (a) and (b) shown on Figure 2. Remark 6. No branches other than exist for . On the other hand, points 2 and 4 on branches (b) and (c) shown on Figure 2 satisfy and . The breather is a saddle point of for these points and it only has three (one) directions of positive energy in space for point 2 (point 4). 7. Spectral and Orbital Stability of Breathers
Spectral stability of breathers can be studied for small values of coupling constant
ϵ by using the perturbation theory [
30]. First, we linearize the
-symmetric dNLS Equation (
9) at the Breather (
19) by using the expansion
where
is a small perturbation satisfying the linearized equations
The spectral stability problem arises from the linearized Equation (
52) after the separation of variables:
where
is the eigenvector corresponding to the spectral parameter
λ. Note that
and
are no longer complex conjugate to each other if
λ has a nonzero imaginary part. The spectral problem can be written in the explicit form
where we have used the condition
for the
-symmetric breathers. Recalling definition of the Hessian operator
in Equation (
46), we can rewrite the spectral Problem (
53) in the Hamiltonian form:
where
is a symmetric matrix with the blocks at each lattice node
given by
We note the Hamiltonian symmetry of the eigenvalues of the spectral Problem (
54).
Proposition 2. Eigenvalues of the spectral Problem (54) occur either as real or imaginary pairs or as quadruplets in the complex plane. Proof. Assume that
is an eigenvalue of the spectral Problem (
54) with the eigenvector
. Then,
is an eigenvalue of the same problem with the eigenvector
, whereas
is also an eigenvalue with the eigenvector
. ☐
If
and
(points 2 and 4 shown on
Figure 2), Theorem 2 implies that the self-adjoint operator
in
is negative-definite with the exception of either three (point 2) or one (point 4) simple positive eigenvalues. In this case, we can apply the following Hamilton–Krein index theorem in order to characterize the spectrum of
.
Hamilton–Krein Index Theorem (Theorem 3.3 in [
33]).
Let L be a self-adjoint operator in with finitely many negative eigenvalues , a simple zero eigenvalue with eigenfunction , and the rest of its spectrum is bounded from below by a positive number. Let J be a bounded invertible skew-symmetric operator in . Let be a number of positive real eigenvalues of , be a number of quadruplets that are neither in nor in , and be a number of purely imaginary pairs of eigenvalues of whose invariant subspaces lie in the negative subspace of L. Let be finite and nonzero. Then, Lemma 3. Fix , , and , where . For every sufficiently small, for branch (b) of Lemma 1 and for branch (c) of Lemma 1 with . For branch (c) with , there exists a value such that for and for .
Proof. If
,
,
, and
is sufficiently small, Theorem 2 implies that the spectrum of
in
has finitely many positive eigenvalues and a simple zero eigenvalue with eigenvector
. Therefore, the Hamilton–Krein index theorem is applied in
for
,
, and
. We shall verify that
where
is given by Equation (
47) and
denotes derivative of Φ with respect to parameter
E. The first equation
follows by Theorem 2. By differentiating Equation (
21) in
E, we obtain
for every
E, for which the solution Φ is differentiable in
E. For
, the limiting solution of Lemma 1 is differentiable in
E for every
and
. Due to smoothness of the continuation in
ϵ by Theorem 2, this property holds for every
sufficiently small.
By using Equation (
57) with
, we obtain
where we have used the definition of
in Equation (
18). We compute the slope condition at
:
where Relations (
24) and (
25) have been used.
For branch (b) of Lemma 1 with , we have and , so that . By continuity, remains strictly positive for small . Thus, and by the Hamilton–Krein index theorem.
For branch (c) of Lemma 1 with
, we have
and
. Therefore, we only need to inspect the sign of the expression
. If
, then for every
, we have
therefore,
and
by the Hamilton–Krein index theorem.
On the other hand, if , we have at () and at (). Since the dependence of A versus E is monotonic, there exists a value such that for and for . ☐
If
and
, orbital stability of a critical point of
in space
can be proved from the Hamilton–Krein theorem (see [
33] and references therein). Orbital stability of breathers is understood in the following sense.
Definition 1. We say that the breather Solution (19) is orbitally stable in if for every sufficiently small, there exists such that if satisfies , then the unique global solution , to the -symmetric dNLS Equation (9) satisfies the bound The definition of instability of breathers is given by negating Definition 1. The following result gives orbital stability or instability for branch (c) shown on
Figure 2.
Theorem 3. Fix , , and . For every sufficiently small, the breather for branch (c) of Lemma 1 is orbitally stable in if . For every , there exists a value such that the breather is orbitally stable in if and unstable if .
Proof. The theorem is a corollary of Lemma 3 for branch (c) of Lemma 1 and the orbital stability theory from [
33]. ☐
Orbital stability of breathers for branches (a) and (b) of Lemma 1 does not follow from the standard theory because for and for branch (b) with . Nevertheless, by using smallness of parameter ϵ and the construction of the breather in Theorem 1, spectral stability of breathers can be considered directly. Spectral stability and instability of breathers is understood in the following sense.
Definition 2. We say that the breather Solution (19) is spectrally stable if for every bounded solution of the spectral Problem (54). On the other hand, if the spectral Problem (54) admits an eigenvalue with an eigenvector in , we say that the breather Solution (19) is spectrally unstable. The following theorem gives spectral stability of breathers for branches (a) and (b) shown on
Figure 2.
Theorem 4. Fix , , and E along branches (a) and (b) of Lemma 1 with and . For every sufficiently small, the spectral Problem (54) admits a double zero eigenvalue with the generalized eigenvectorswhere the eigenvector is given by Equation (47) and the generalized eigenvector denotes derivative of Φ
with respect to parameter E. For every E such that the following non-degeneracy condition is satisfied,the breather is spectrally stable. Proof. If
, the breather solution of Theorem 1 is given by
for every
and
, where
A and
θ are defined by Lemma 1. In this case, the spectral Problem (
53) decouples into 4-by-4 blocks for each lattice node
. Recall that
at
.
For
, eigenvalues
λ are determined by the 4-by-4 matrix block
. Using Relations (
24) and (
25), as well as symbolic computations with MAPLE, we found that the 4-by-4 matrix block
has a double zero eigenvalue and a pair of simple eigenvalues at
, where
For
, eigenvalues
λ are determined by the 4-by-4 matrix block
, where
is given by Equation (
50). If
,
, and
, where
, each block has four simple eigenvalues
and
, where
so that
. Since there are infinitely many nodes with
, the four eigenvalues are semi-simple and have infinite multiplicity.
If
is sufficiently small, we use perturbation theory for linear operators from
Section 6.
The double zero eigenvalue persists with respect to
at zero because of the gauge invariance of the breather
(with respect to rotation of the complex phase). Indeed,
follows from the result of Theorem 2. The generalized eigenvector is defined by equation
, which is equivalent to equation
. Differentiating Equation (
21) in
E, we obtain
. Since
and
the second generalized eigenvector
exists as a solution of equation
if and only if
. It follows from the explicit Computation (
59) that if
, then
for every
E along branches (a) and (b) of Lemma 1. By continuity,
for small
. Therefore, the zero eigenvalue of the operator
is exactly double for small
.
Using the same Computation (
59), it is clear that
for every
E along branches (a) and (b) of Lemma 1. Assume that
and
, which is expressed by the non-degeneracy Condition (
62). Then, the pair
is isolated from the rest of the spectrum of the operator
at
. Since the eigenvalues
are simple and purely imaginary, they persist on the imaginary axis for
because they cannot leave the imaginary axis by the Hamiltonian symmetry of Proposition 2.
If
,
, and
, the semi-simple eigenvalues
and
of infinite multiplicity are nonzero and located at the imaginary axis at different points for
. They persist on the imaginary axis for
according to the following perturbation argument. First, for the central site
, the spectral Problem (
53) can be written in the following abstract form
where
denotes a continuation of
in
ϵ. Thanks to the non-degeneracy Condition (
62) as well as the condition
, the matrix
is invertible. By continuity, the matrix
is invertible for every
ϵ and
λ near
and
. Therefore, there is a unique
given by
which satisfies
near
and
, where
C is a positive
ϵ- and
λ-independent constant. Next, for either
or
, the spectral Problem (
53) can be represented in the form
where
denotes a continuation of
given by Equation (
50) in
ϵ, whereas the operator Δ is applied with zero end-point condition at
. We have
and
near
and
. Therefore, up to the first order of the perturbation theory, the spectral parameter
λ near
is defined from the truncated eigenvalue problem
which is solved with the discrete Fourier Transform (
40). In order to satisfy the Dirichlet end-point condition at
, the sine–Fourier transform must be used, which does not affect the characteristic equation for the purely continuous spectrum of the spectral Problem (
66). By means of routine computations, we obtain the characteristic equation in the following form, see also Equation (
41):
where
is the parameter of the discrete Fourier Transform (
40). Solving the characteristic Equation (
67), we obtain four branches of the continuous spectrum
where the two sign choices are independent from each other. If
is fixed and
is small, the four branches of the continuous spectrum are located on the imaginary axis near the points
and
given by Equation (
64).
In addition to the continuous spectrum given by Equation (
67), there may exist isolated eigenvalues near
and
, which are found from the second-order perturbation theory [
34]. Under the condition
and
, these eigenvalues are purely imaginary. Therefore, the infinite-dimensional part of the spectrum of the operator
persists on the imaginary axis for
near the points
and
of infinite algebraic multiplicity.
The statement of the lemma follows from the perturbation theory and the fact that all isolated eigenvalues and the continuous spectrum of are purely imaginary. ☐
Remark 7. In the asymptotic limit as , the eigenvalues and defined by Equations (63) and (64) are given asymptotically bywhere the remainder terms are as . The values , , and are close to each other as . Remark 8. Computations in the proof of Theorem 4 can be extended to the branch (c) of Lemma 1. Indeed, for branch (c) with either or , and E near . On the other hand, if and E near 0. As a result, branch (c) is spectrally stable in the former case and is spectrally unstable in the latter case, in agreement with Theorem 3.
Remark 9. Observe in the proof of Theorem 4 that if . In this case, branch (b) of Lemma 1 is spectrally unstable. This instability corresponds to the instability of the zero equilibrium for , in agreement with the result of Proposition 1.
Before presenting numerical approximations of eigenvalues of the spectral Problem (
54), we compute the Krein signature of wave continuum. This helps to interpret instabilities and resonances that arise when isolated eigenvalues
cross the continuous bands near points
and
. The Krein signature of simple isolated eigenvalues is defined as follows.
Definition 3. Let be an eigenvector of the spectral Problem (54) for an isolated simple eigenvalue . Then, the energy quadratic form is nonzero and its sign is called the Krein signature of the eigenvalue . Definition 3 is used to simplify the presentation. Similarly, one can define the Krein signature of isolated multiple eigenvalues and the Krein signature of the continuous spectral bands in the spectral Problem (
54) [
33]. The following lemma characterizes Krein signatures of the spectral points arising in the proof of Theorem 4.
Lemma 4. Fix , , and with . Assume the non-degeneracy Condition (62). For every sufficiently small, we have the following for the corresponding branches of Lemma 1:- (a)
the subspaces of in near , , and have positive, negative, and positive Krein signature, respectively;
- (b)
the subspaces of in near , , and have negative, positive (if ) or negative (if ), and positive Krein signature, respectively;
- (c)
all subspaces of in near , , and (if ) have negative Krein signature.
Proof. We proceed by the perturbation arguments from the limit
, where
is a block-diagonal operator consisting of
blocks. In particular, we consider the blocks for
, where
is given by Equation (
50). Solving (
53) at
and
, we obtain the eigenvector
As a result, we obtain for the eigenvector
:
For branch (a), and . Therefore, for and for .
For branch (b), and either or . In either case, for . On the other hand, for , if and if .
For branch (c), and . In this case, for either or .
Finally, the Krein signature for the eigenvalue denoted by follows from the computations of eigenvalues in the proof of Theorem 2. We have for branches (a) and (b) because and we have for branch (c) because , whereas the eigenvalue is controlled by the result of Lemma 3.
The signs of all eigenvalues are nonzero and continuous with respect to parameter ϵ. Therefore, the count above extends to the case of small nonzero ϵ. ☐
The spectrum of
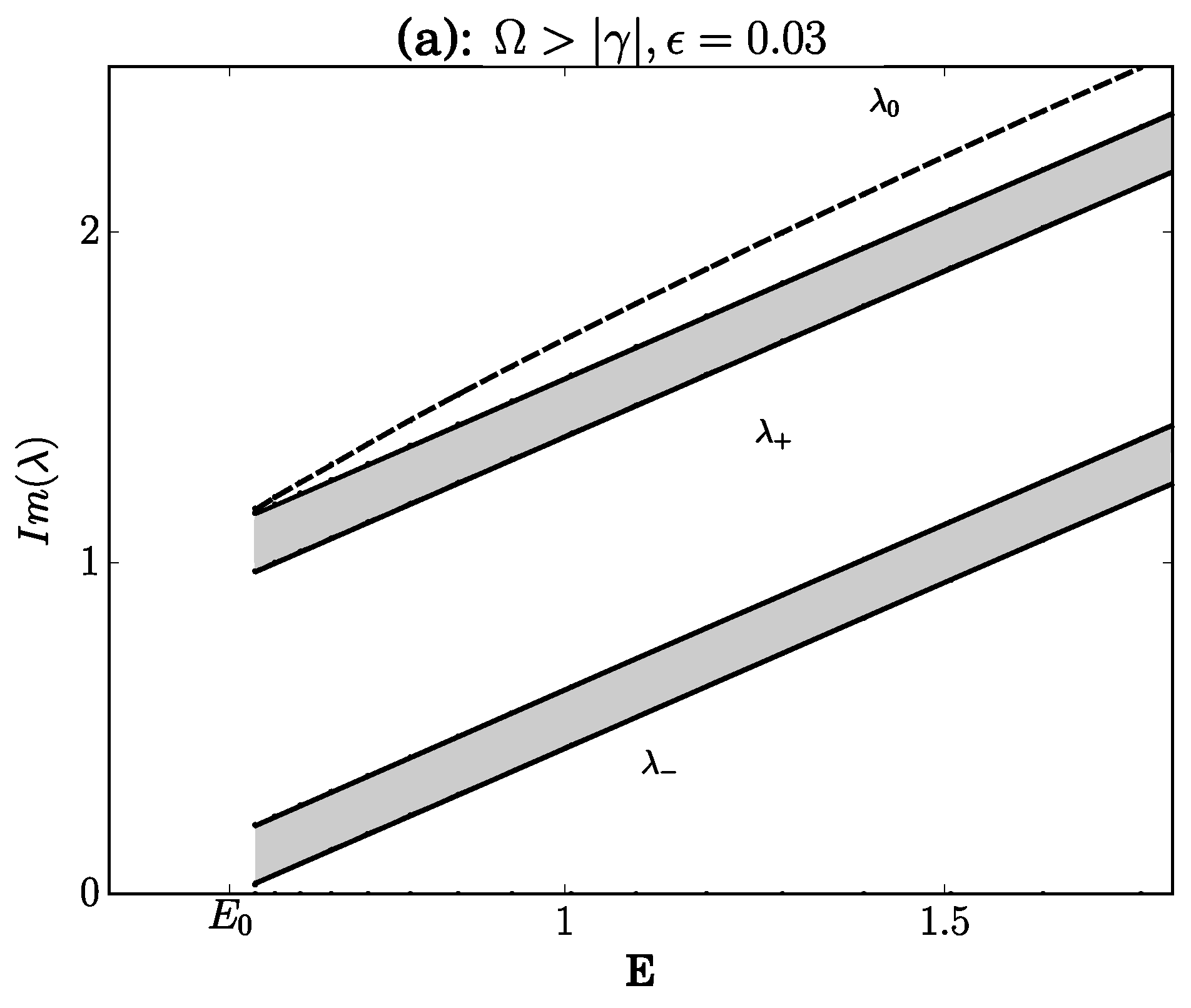
is shown at
Figure 3. Panels (a), (b) and (c) correspond to branches shown at
Figure 2.
- (a)
We can see on panel (a) of
Figure 3 that
do not intersect for every
and are located within fixed distance
, as
. Note that the upper-most
and
have positive Krein signature, whereas the lowest
has negative Krein signature, as is given by Lemma 4.
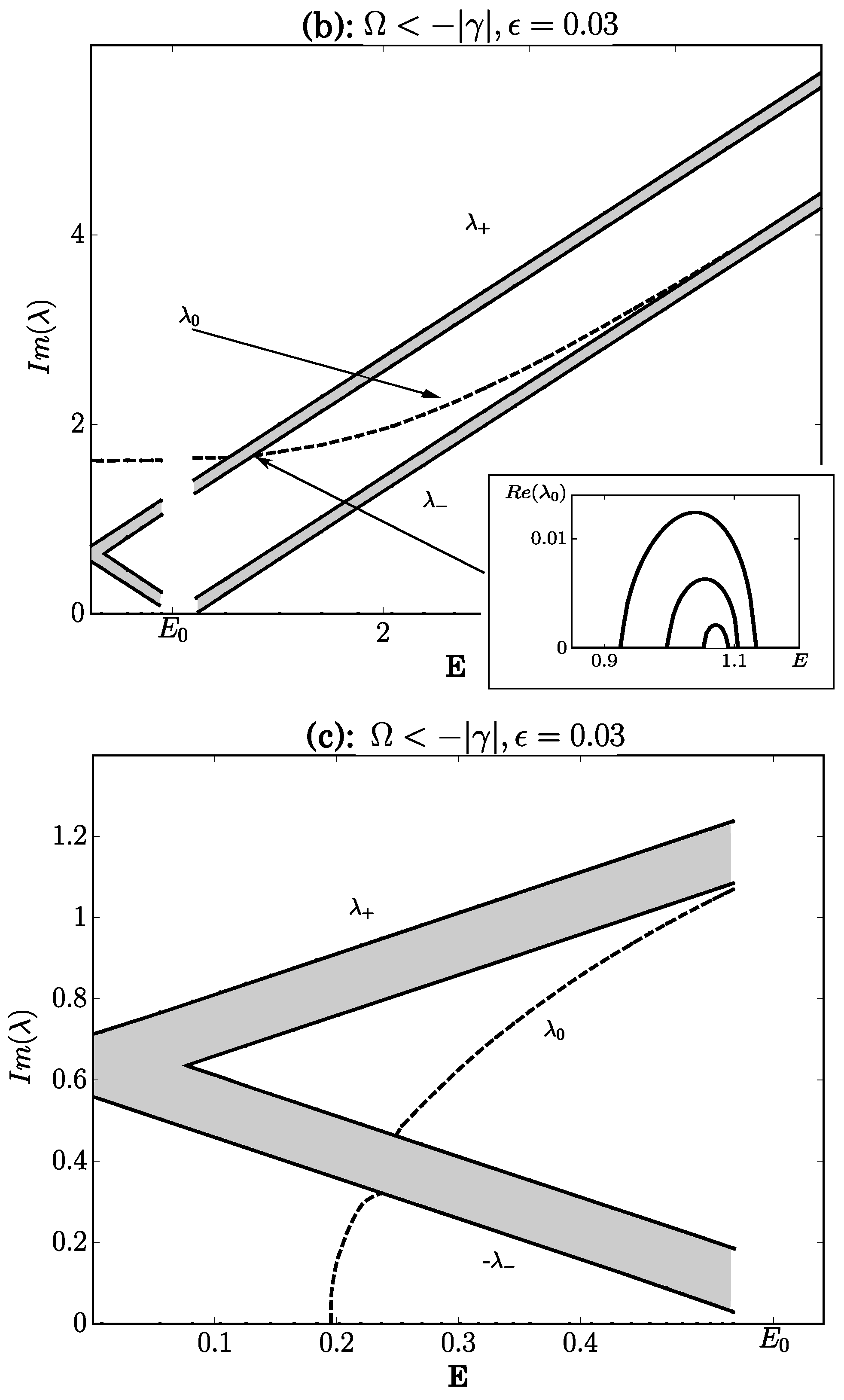
- (b)
We observe on panel (b) of
Figure 3 that
intersects
, creating a small bubble of instability in the spectrum. The insert shows that the bubble shrinks as
, in agreement with Theorem 4. There is also an intersection between
and
, which does not create instability. These results are explained by the Krein signature computations in Lemma 4. Instability is induced by opposite Krein signatures between
and
, whereas crossing of
and
with the same Krein signatures is safe of instabilities. Note that for small
E, the isolated eigenvalue
is located above both the spectral bands near
and
. The gap in the numerical data near
indicates failure to continue the breather solution numerically in
ϵ, in agreement with the proof of Theorem 1.
- (c)
We observe from panel (c) of
Figure 3 that
and
intersect but do not create instabilities, since all parts of the spectrum have the same signature, as is given by Lemma 4. In fact, the branch is both spectrally and orbitally stable as long as
, in agreement with Theorem 3. On the other hand, there is
, if
, such that
for
, which indicates instability of branch (c), again, in agreement with Theorem 3.
As we see on panel (b) of
Figure 3,
intersects
for some
. In the remainder of this section, we study whether this crossing point is always located on the right of
. In fact, the answer to this question is negative. We shall prove for branch (b) that the intersection of
with either
or
occurs either for
or for
, depending on parameters
γ and Ω.
Lemma 5. Fix , , and along branch (b) of Lemma 1. There exists a resonance at with if and if , whereMoreover, if , there exists a resonance at with . Proof. Let us first assume that there exists a resonance
at
and find the condition on
γ and Ω, when this is possible. From the Definitions (
63) and (
64), we obtain the constraint on
:
After canceling
since
with
given by Equation (
27), we obtain
which has two roots
Since
, the lower sign is impossible because this leads to a contradiction
The upper sign is possible if
. Using the Parametrization (
25), we substitute the root for
to the equation
and simplify it:
This equation further simplifies to the form:
Squaring it up, we obtain
which has only one positive root for
given by
This root yields a formula for
in Equation (
70). Since there is a unique value for
, for which the case
is possible, we shall now consider whether
or
for
or
.
To inspect the range
, we consider a particular case, for which the intersection
happens at
. In this case,
given by Equation (
27), so that the condition
can be rewritten as
There is only one negative root for Ω and it is given by . By continuity, we conclude that for and for , both cases correspond to .
Finally, we verify that the case occurs for if . Indeed, and as , so that as . On the other hand, the previous estimates suggest that for every if . Therefore, there exists at least one intersection for if . ☐
Remark 10. The existence of the resonance at for some parameter configurations predicted by Lemma 5 is in agreement with the numerical results in [25,26] on the scalar parametrically forced dNLS equation that follows from System (5) under the Reduction (6). It was reported in [25,26] that the instability bubble for breather solutions may appear for every nonzero coupling constant ϵ in a narrow region of the parameter space. 8. Summary
We have reduced Newton’s equation of motion for coupled pendula shown on
Figure 1 under a resonant periodic force to the
-symmetric dNLS Equation (
9). We have shown that this system is Hamiltonian with conserved Energy (
17) and an additional conserved Quantity (
18). We have studied breather solutions of this model, which generalize symmetric synchronized oscillations of coupled pendula that arise if
. We showed existence of three branches of breathers shown on
Figure 2. We also investigated their spectral stability analytically and numerically. The spectral information on each branch of solutions is shown on
Figure 3. For branch (c), we were also able to prove orbital stability and instability from the energy method. The technical results of this paper are summarized in
Table 1 and described as follows.
For branch (a), we found that it is disconnected from the symmetric synchronized oscillations at
. Along this branch, breathers of small amplitudes
A are connected to breathers of large amplitudes
A. Every point on the branch corresponds to the saddle point of the energy function between two wave continua of positive and negative energies. Every breather along the branch is spectrally stable and is free of resonance between isolated eigenvalues and continuous spectrum. In the follow-up work [
21], we will prove long-time orbital stability of breathers along this branch.
For branch (b), we found that the large-amplitude breathers as
are connected to the symmetric synchronized oscillations at
, which have the smallest (but nonzero) amplitude
. Breathers along the branch are spectrally stable except for a narrow instability bubble, where the isolated eigenvalue
is in resonance with the continuous spectrum. The instability bubble can occur either for
, where the breather is a saddle point of the energy function between two wave continua of opposite energies or for
, where the breather is a saddle point between the two negative-definite wave continua and directions of positive energy. When the isolated eigenvalue of positive energy
is above the continuous spectrum near
and
, orbital stability of breathers can be proved by using the technique in [
35], which was developed for the dNLS equation.
Finally, for branch (c), we found that the small-amplitude breathers at are connected to the symmetric synchronized oscillations at , which have the largest amplitude . Breathers are either spectrally stable near or unstable near , depending on the detuning frequency Ω and the amplitude of the periodic resonant force γ. When breathers are spectrally stable, they are also orbitally stable for infinitely long times.







{kind=link}
{kind=link}
{kind=link}
{kind=link}