1. Introduction
Indoor positioning systems (IPS) are emerging as a technology, due to the increasing popularity and demand in location based service indoors [
1,
2]. One of the most famous location-aware services is the Global Positioning System (GPS), but there must be a direct line-of-sight between receiver and satellite in an unshielded environment. GPS is used for outdoor locations. However, its performance is very poor in indoor environments [
3]. Therefore, different types of indoor positioning systems have been developed for personal and commercial needs [
4,
5]. Among all of the indoor positioning methods, Benavente-Peces et al. [
6] found that Radio Frequency Identification (RFID) is the best choice for indoor positioning with high accuracy and low cost.
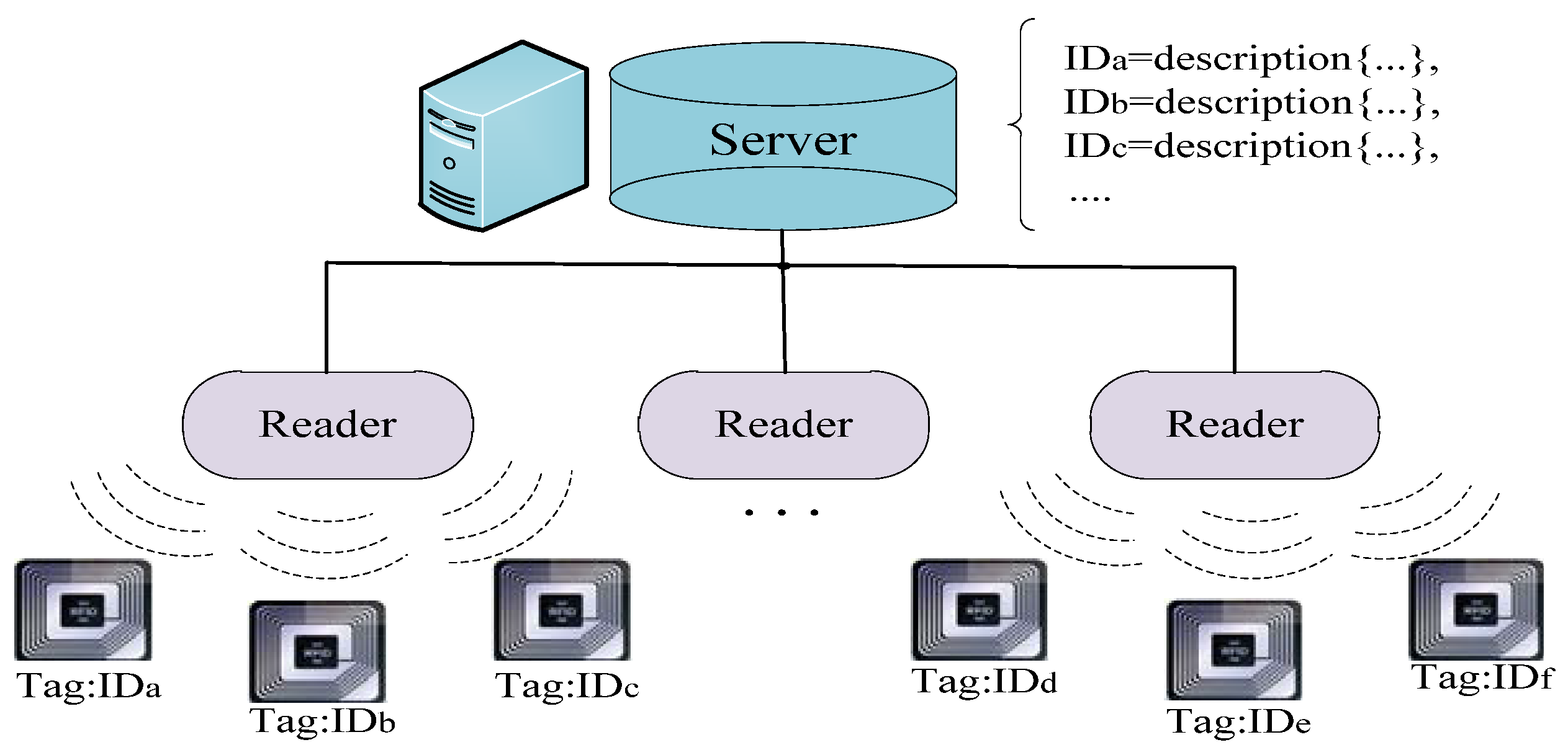
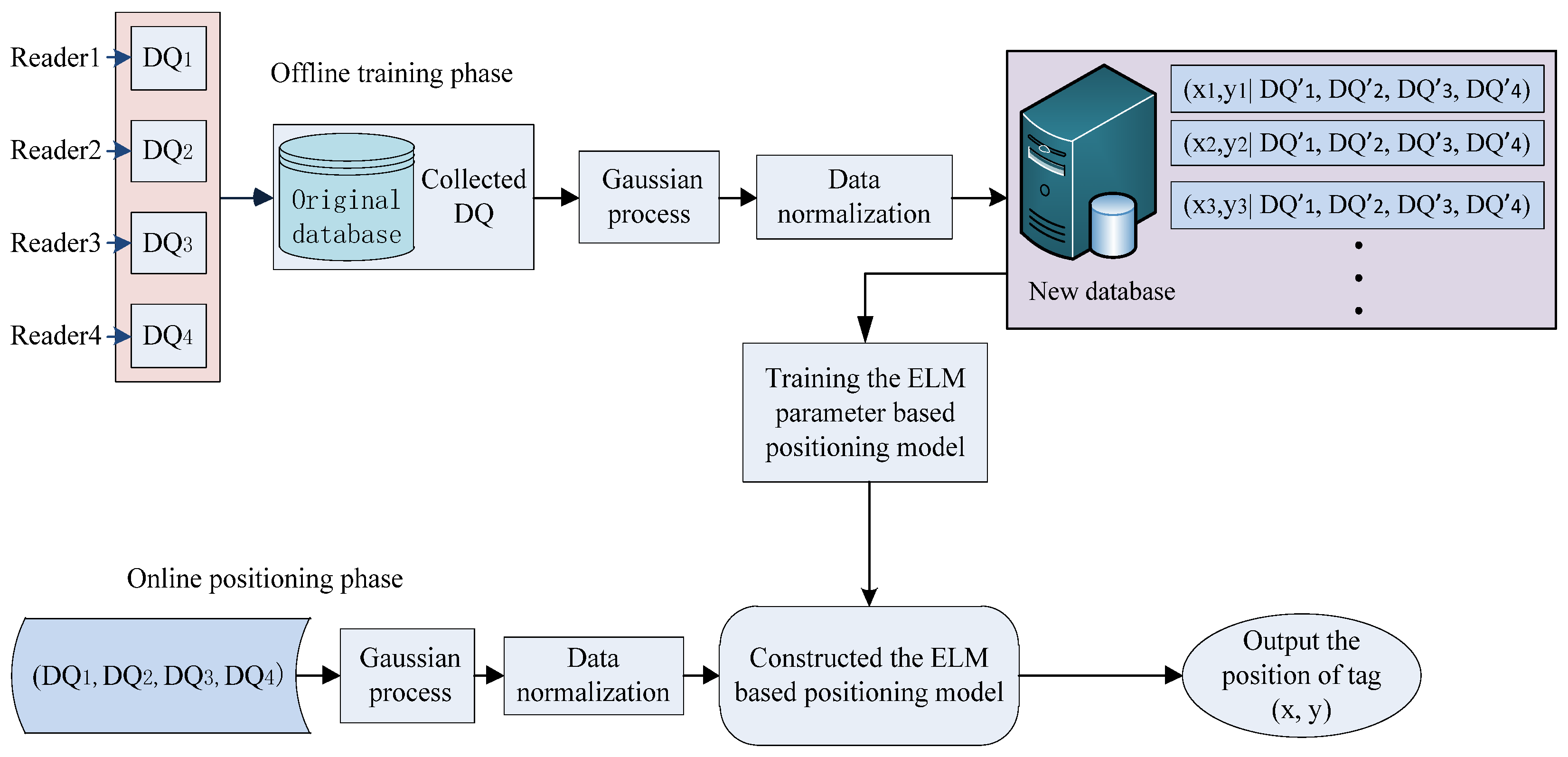
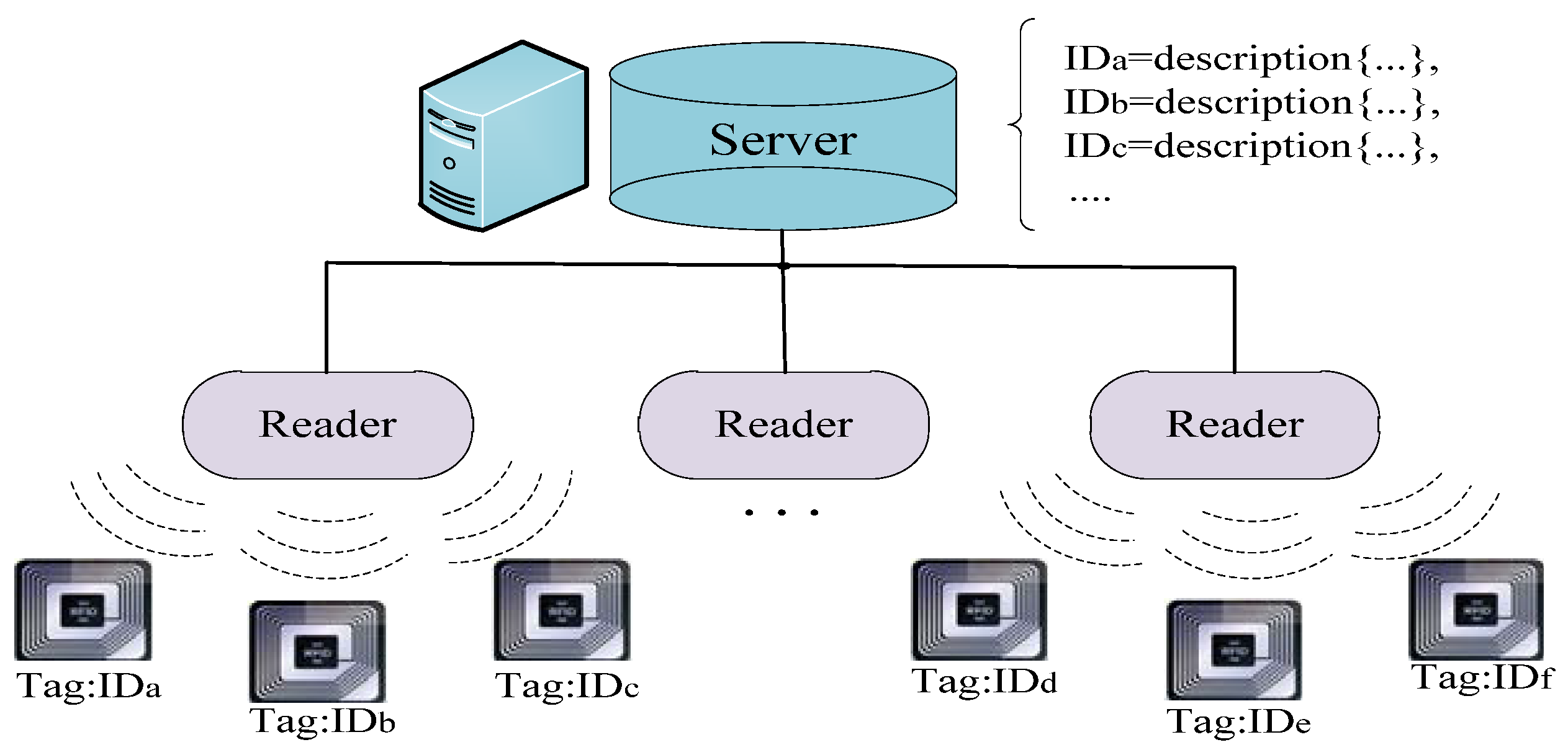
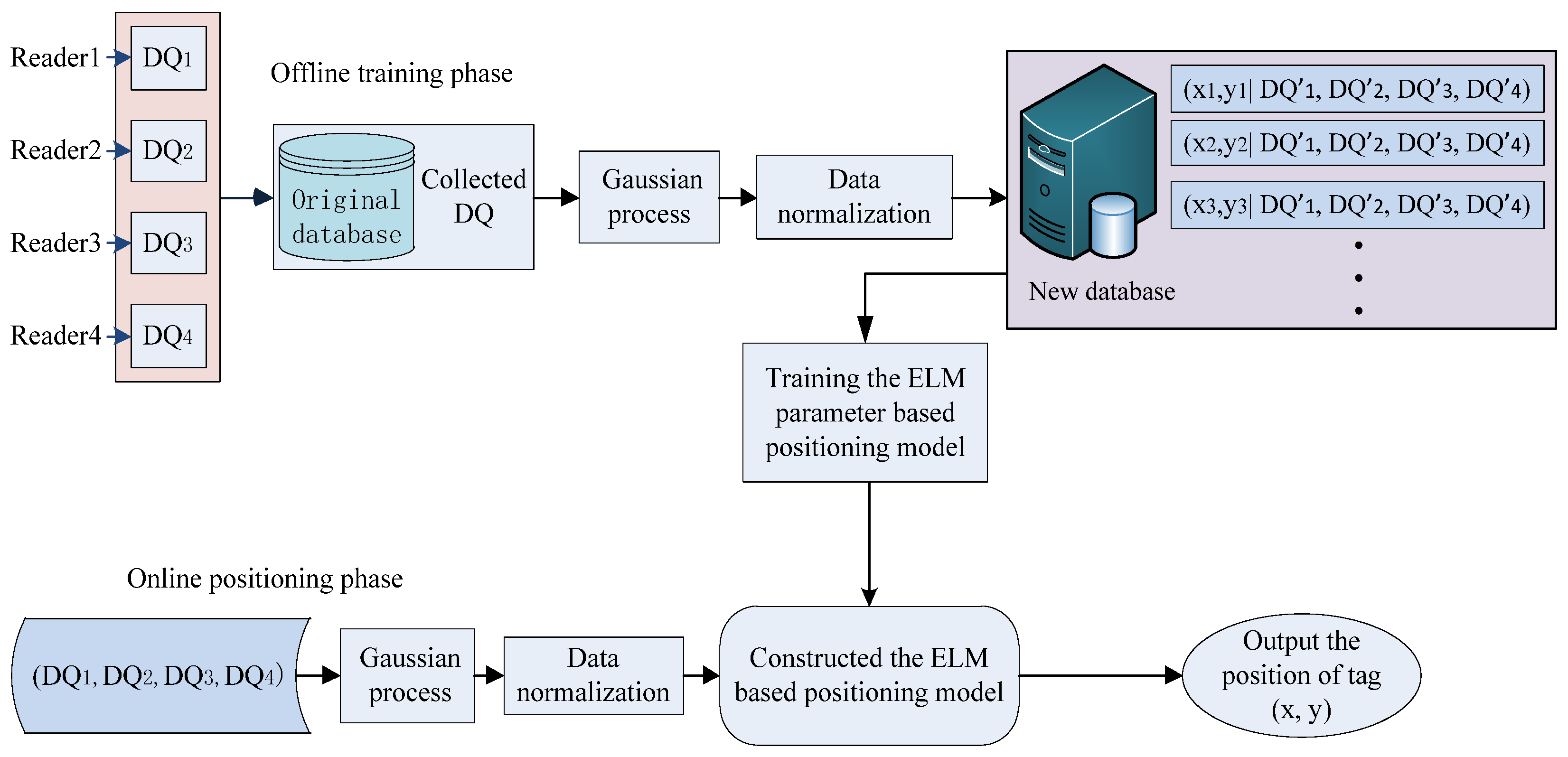
RFID is a rapidly developing technology that it uses radio frequency (RF) signals to automatically identify objects. It has been widely applied in various fields for tool tracking, process management, access control and supply chain, such as access cards and electronic wallets. A typical RFID networks system was illustrated in
Figure 1 that consists of three different entities: RFID readers, tags and servers. Furthermore, the RFID system has also been applied in the location field for the real-time tracking and positioning of indoor targets. At first, Shiraishi et al. [
7] proposed an indoor positioning estimation system based on UHF RFID. Furthermore, Wang et al. [
8] have successfully designed an indoor personnel tracking and positioning system based on RFID technology combined with images. Similarly, Montaser et al. [
9] present a low-cost indoor positioning and material tracking methodology for construction projects using passive UHF RFID technology. Goodrum et al. [
10] also explored the applications of UHF RFID technology that is used for tool tracking on construction job sites. Therefore, UHF RFID is used for indoor positioning in this paper.
Currently, an extensive body of research for the IPS has focused on the machine learning approaches such as Extreme Learning Machine (ELM) [
11], Artificial Neural Network (ANN) or Support Vector Machine (SVM) [
12] and so on, in order to overcome the shortcomings faced by the traditional positioning methods. Wu et al. [
13] applied the ANN to overcome the limitations of the empirical positioning formula, which was used in the previous research. The ANN can learn the geography features to adapt to the real world, which can avoid the impact of the multipath phenomenon and be flexibly applied to any environment. However, the weights of ANN are not easy to be determined. For that reason, Kuo et al. [
14] proposed a feature selection-based Back-Propagation (BP) neural network that uses an Artificial Immune System (AIS) (BP-AIS) to determine the connecting weights of ANN, and forecasts the position of the picking staff for warehouse management. Similarly, Ceravolo et al. [
15] applied the genetic algorithm (GA) to determine the parameters of BP network (GA-BP) and applied it to predict and control the environment temperature.
In addition, Zou et al. [
16] proposed the ELM to overcome the indoor positioning problem and, through the experimental evaluation, reported that an ELM-based on positioning system can provide higher positioning accuracy and robustness over that of a traditional method. Jiang et al. [
17] presented a fusion position framework with a Particle Filter using Wi-Fi signals and motion sensors, which use the ELM regression algorithm to predict the location of the target. The system consists of three main modules: a sensor data based position model (ELM regression), the fusion Particle Filter model and the Wi-Fi based position model. The results show that the proposed method achieves a good performance, for example, achieving a better accuracy than the traditional fingerprint method. Fu et al. [
18] proposed the kernel ELM to locate the target position and compared it with machine learning algorithms such as SVM [
19,
20] and BP, and the result reveals that the kernel ELM has good prediction performance and fast learning speed.
It is worth mentioning that the above research has been made good progress. Unfortunately, most of these studies have neglected the filtering processing for experimental data because the RSSI is affected by many factors, such as indoor temperature, humidity, multi-path effect and so on, which leads to a large fluctuation of RSSI. Therefore, this paper will propose an indoor positioning system based on a Gaussian filter combined with ELM and verify its performance via comparison with prevailing methods.
The remainder of this paper is organized as follows.
Section 2 presents the related works of this research. The proposed method is explained in
Section 3.
Section 4 designed the experimental and comparison analysis.
Section 5 discussed the experimental results. Finally,
Section 6 presents the conclusions and future research directions.
4. Experimental Results and Analysis
In order to evaluate the performance of the proposed method, some experiments were conducted. In our experiment, the type of Laird-S8658WPL UHF RFID System (including reader and receiving antenna, LJYZN, Shanghai, China) was used to collect the RFID signals. The UHF RFID unit of this device is MHz and the main working frequency is 865–965 MHz, the gain is 6 dBiC and the power is 10 W. In addition, the RSSI unit is dBm. All evaluation processes were conducted in a MATLAB (R2013b version, MathWorks corporation, Natick, MA, USA) environment running in a Windows 7 machine with an Intel Core i7 central processing unit (CPU) of 3.07 GHz and a 4 GB of random access memory (RAM).
4.1. Experimental Environment
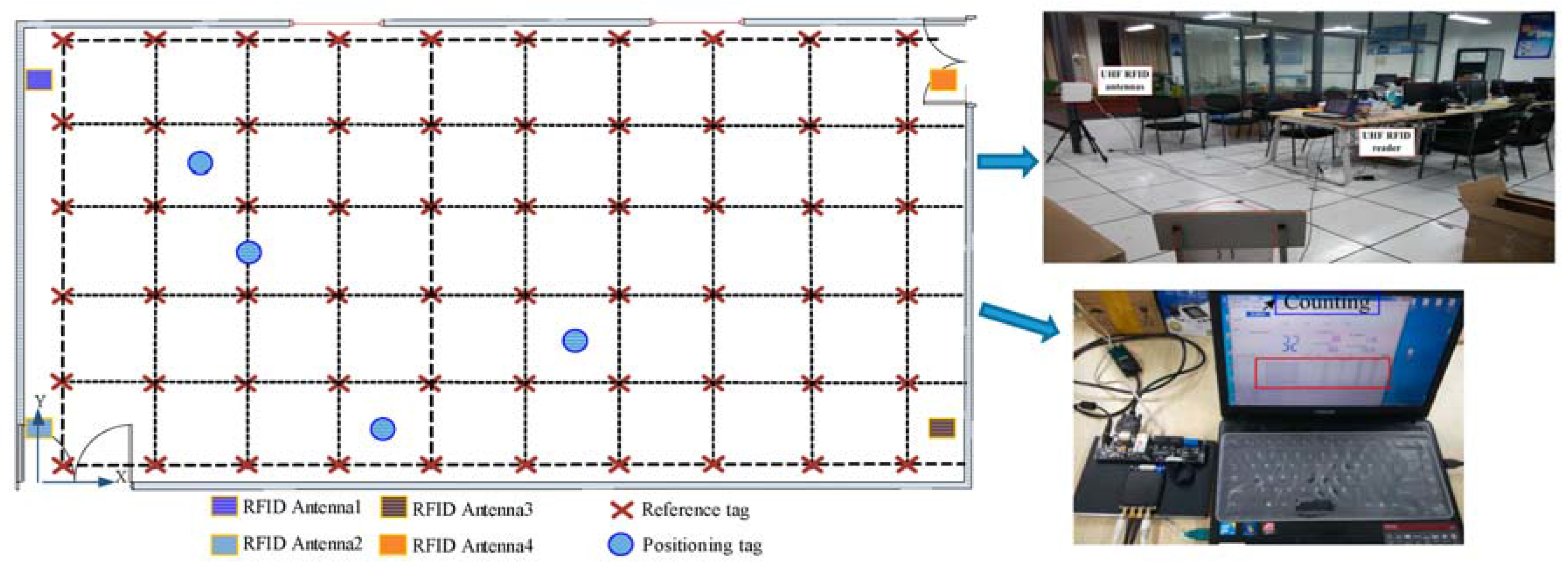
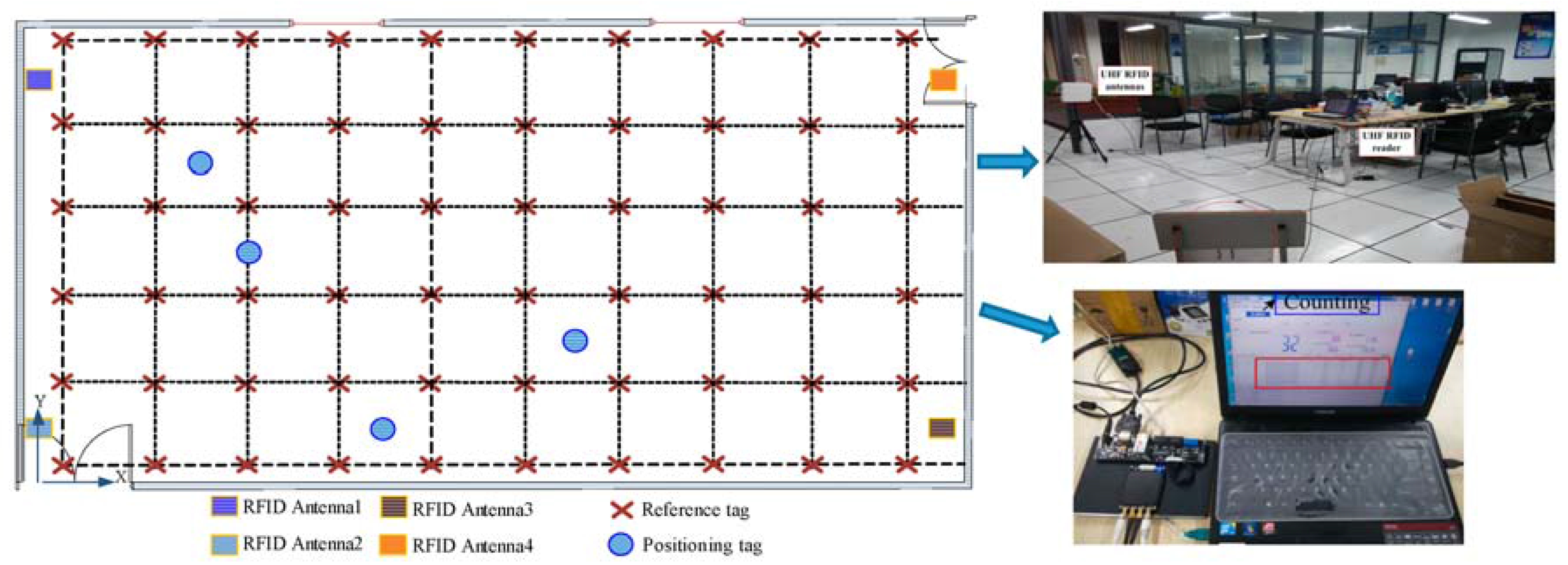
The simulated environment is illustrated as shown in
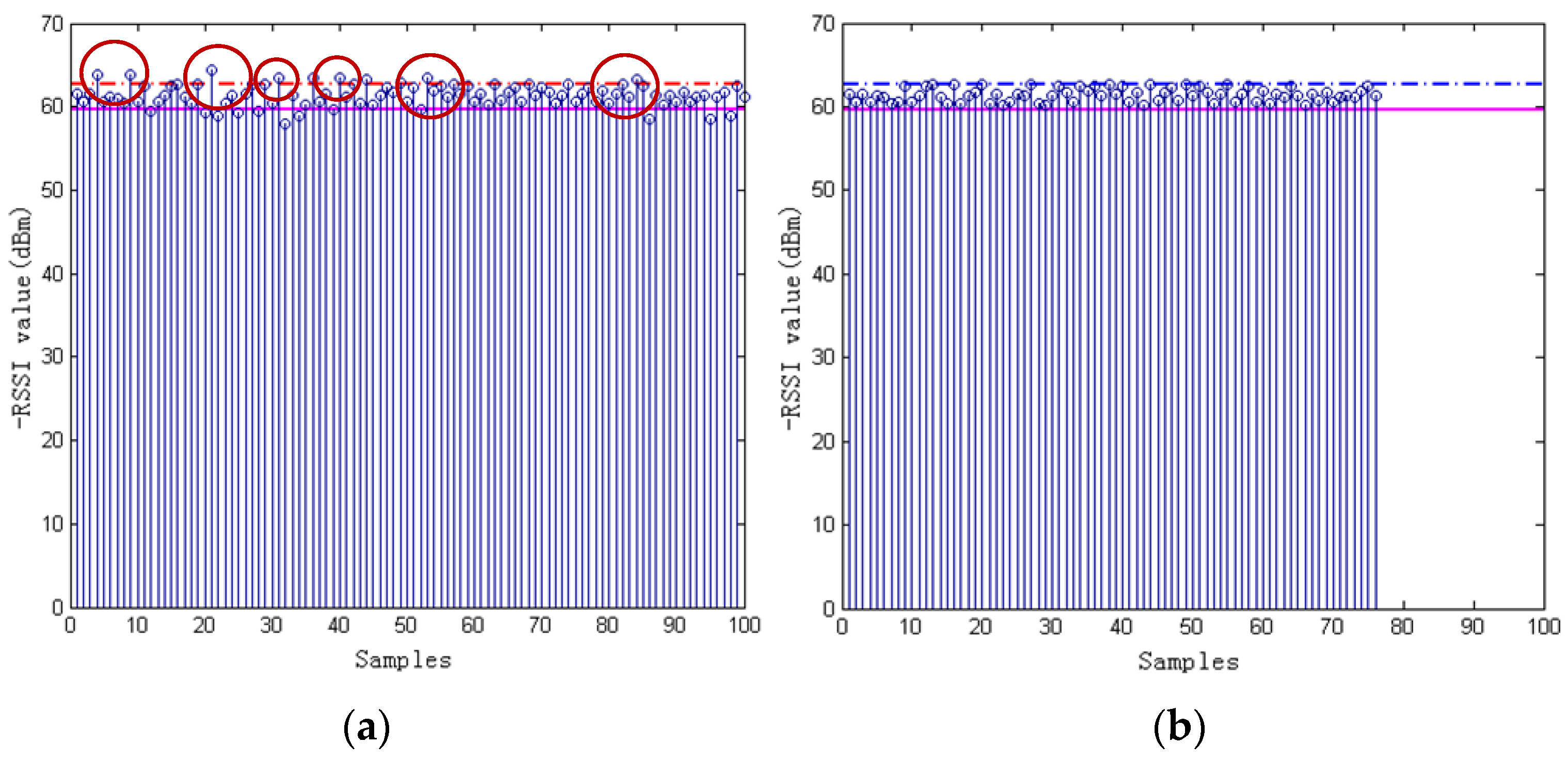
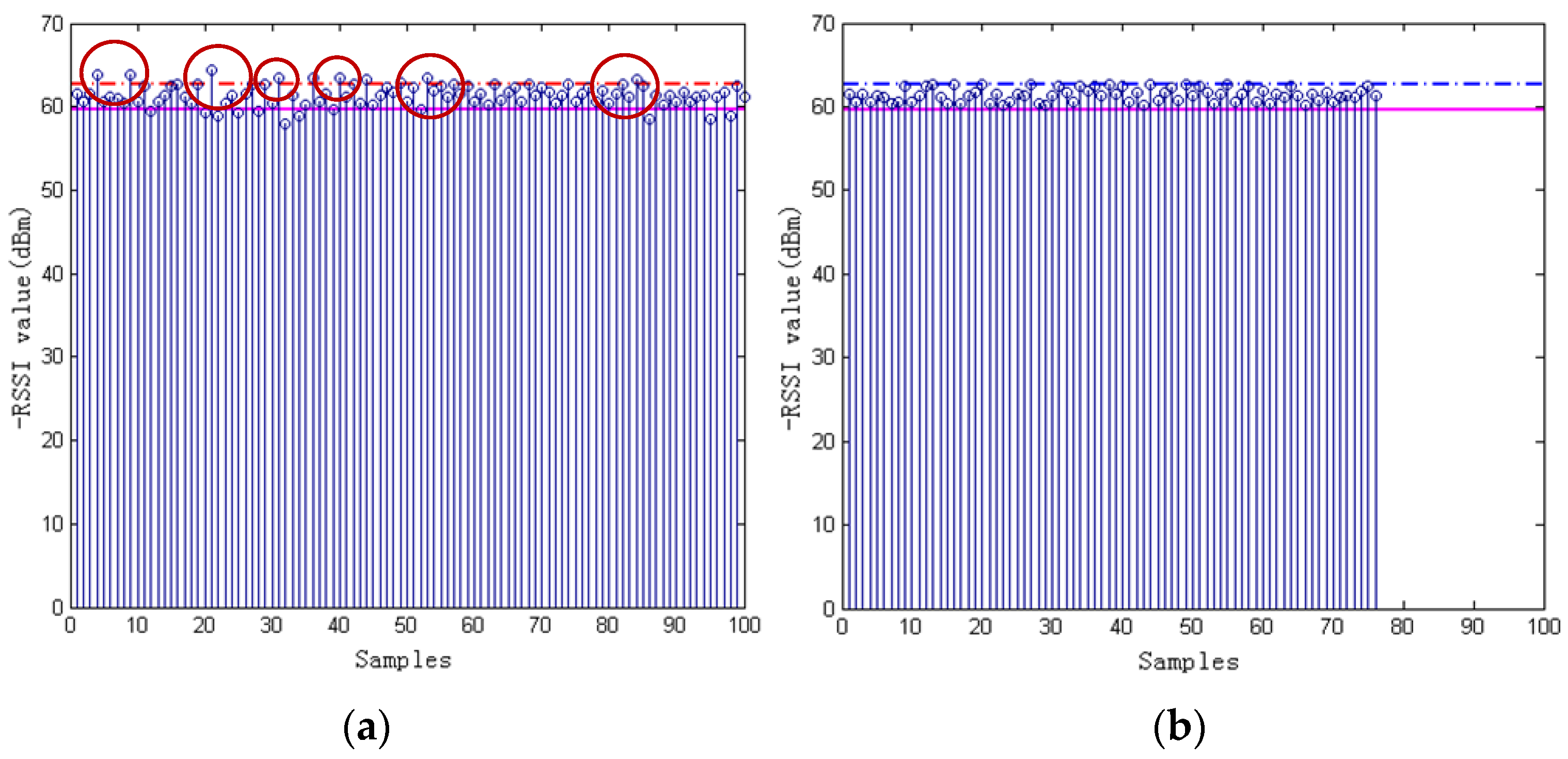
Figure 8. The size of the experimental environment is approximately 11 m × 6 m where a total of 60 reference tags and four UHF RFID antennas were used. The distance between every two adjacent reference tags was 1.2 m, and the four antennas are connected to a reader and fixed in the four different corners of the location area, respectively. When the reader is working, the four antennas will receive the different information (including the RSSI values between the tags and the antennas), which comes from the tag feedback. In order to obtain an accurate RSSI value from the reference tag, the RSSI value of the tag is repeatedly measured 100 times
by the antenna at a fixed point, and Gaussian is used to process these RSSI values as described in
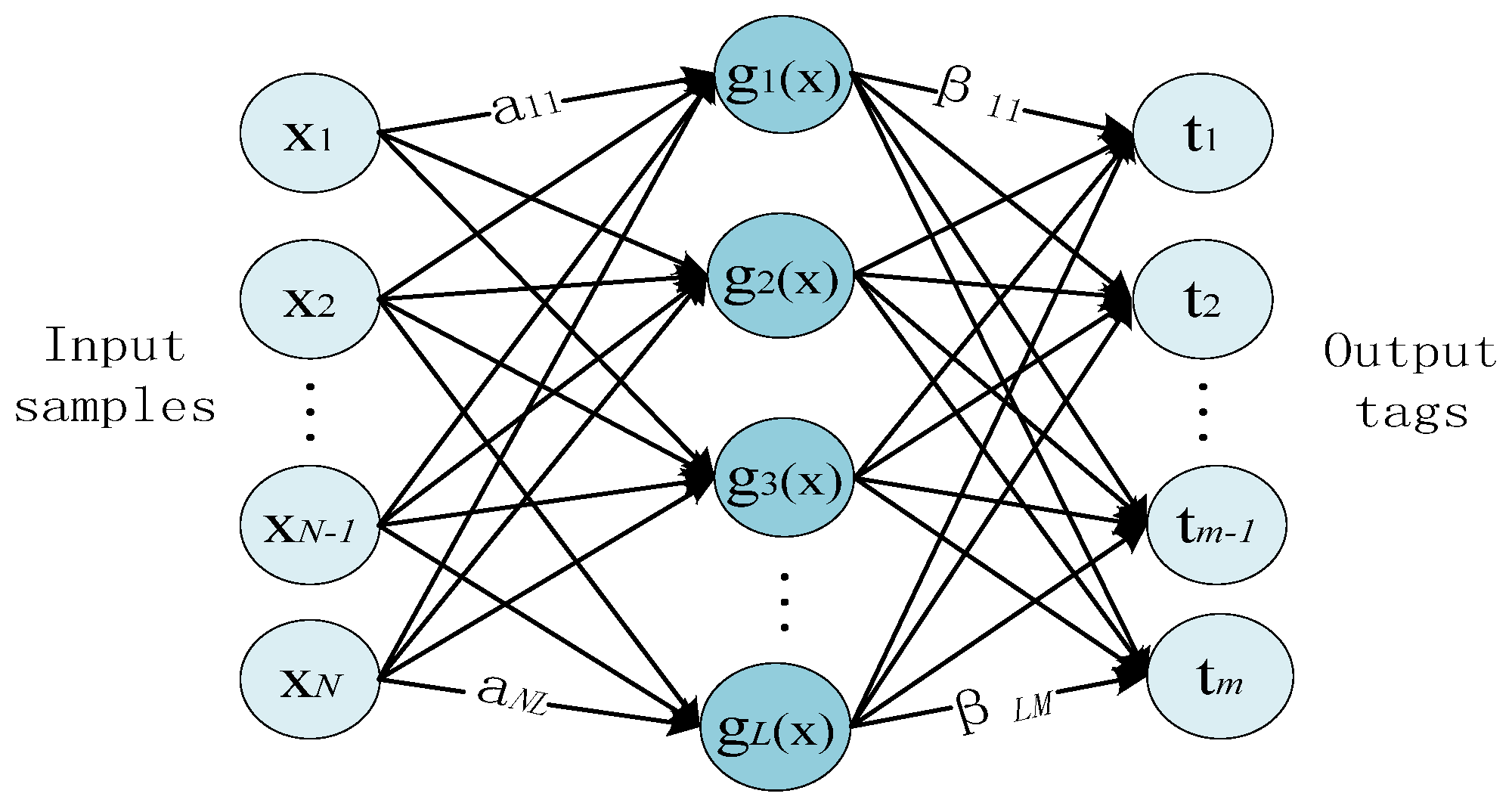
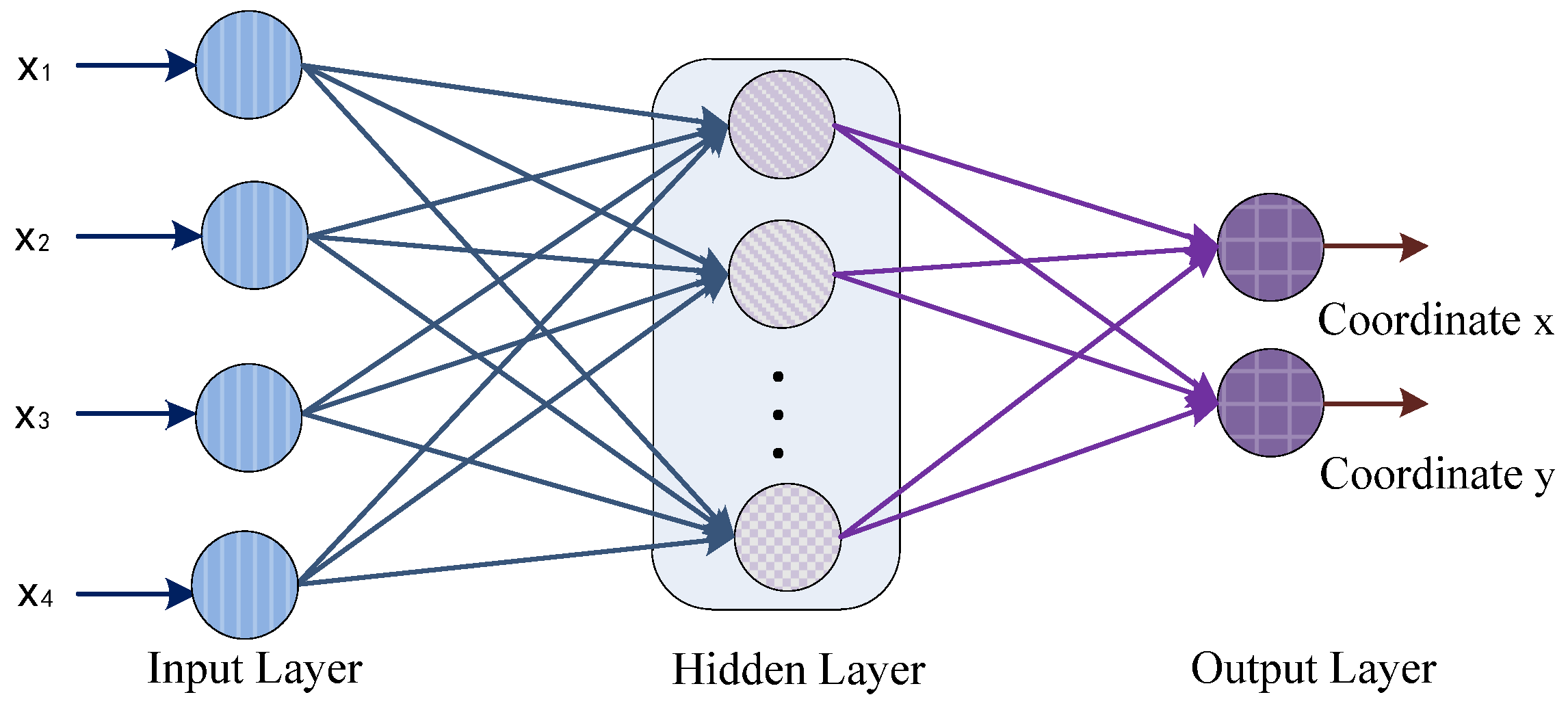
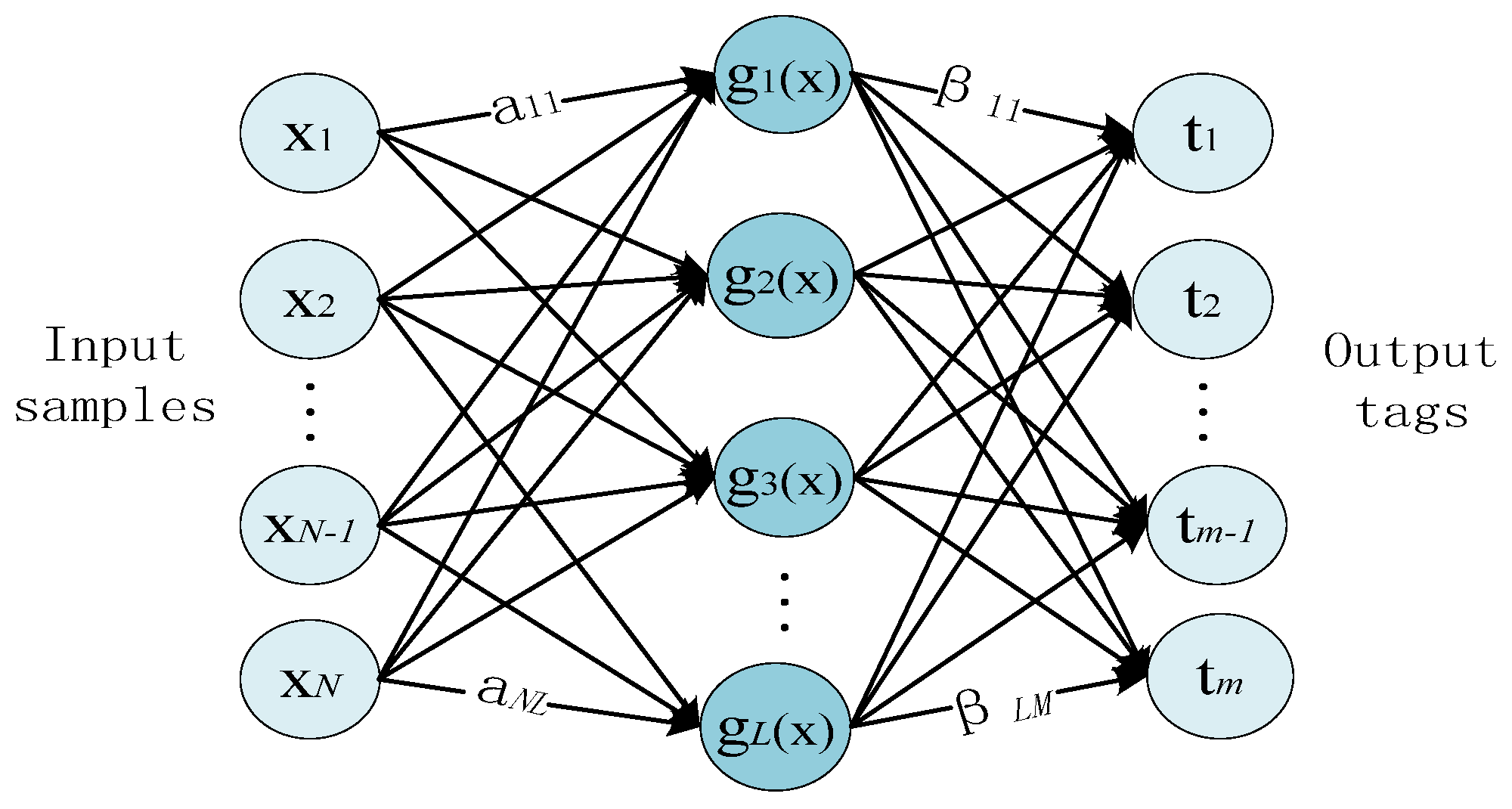
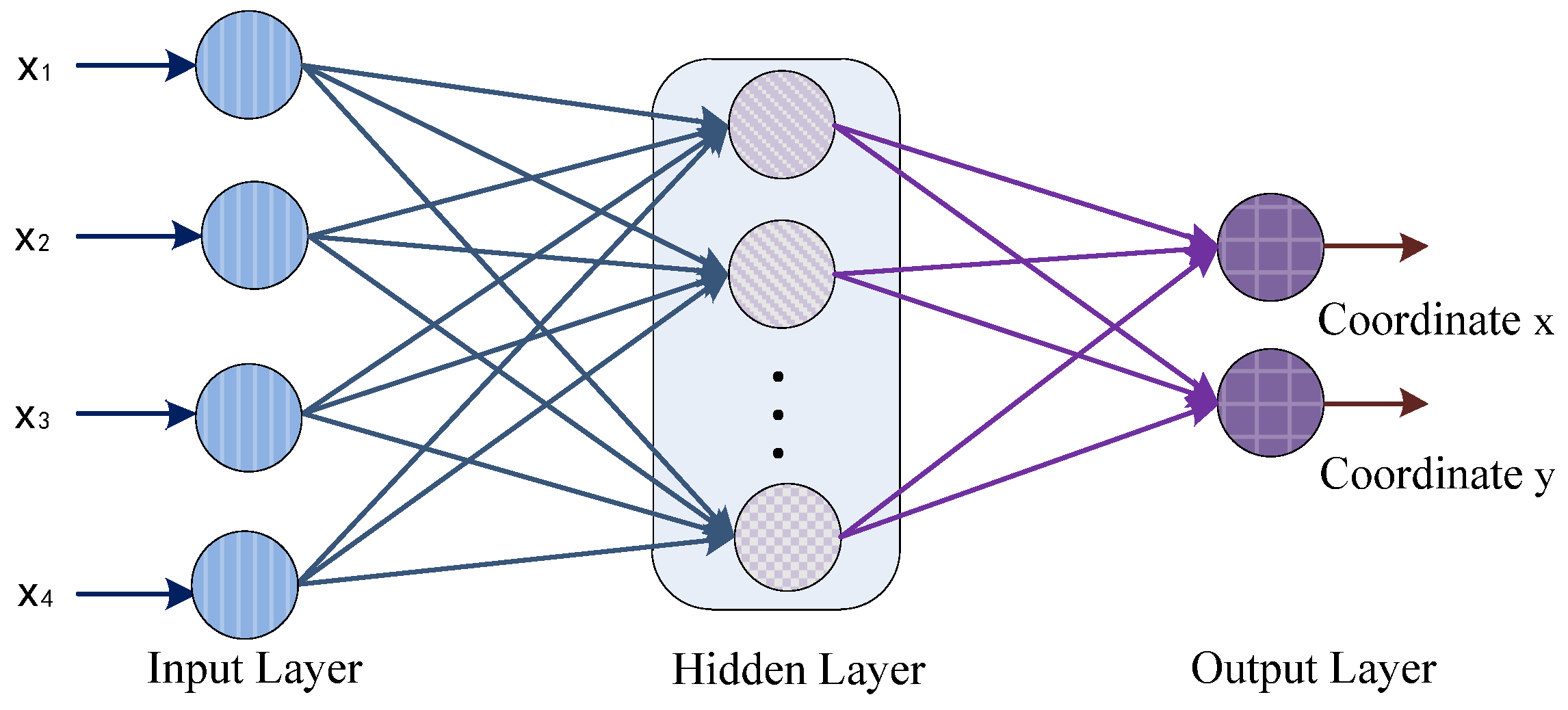
Section 3.1. Finally, the experiment yielded 240 groups’ perfect sample data elements, including the RSSI values of tags and corresponding positions (60 RSSI data elements for each antenna), and the sample data are regarded as the input values for the ELM network as shown in
Figure 9, where
As shown in
Figure 9, the architecture of ELM network has nine inputs, each representing a set of RSSI vectors, and two outputs, representing the geography coordinate of the tag position.
4.2. Selection of Parameters for the ELM Model
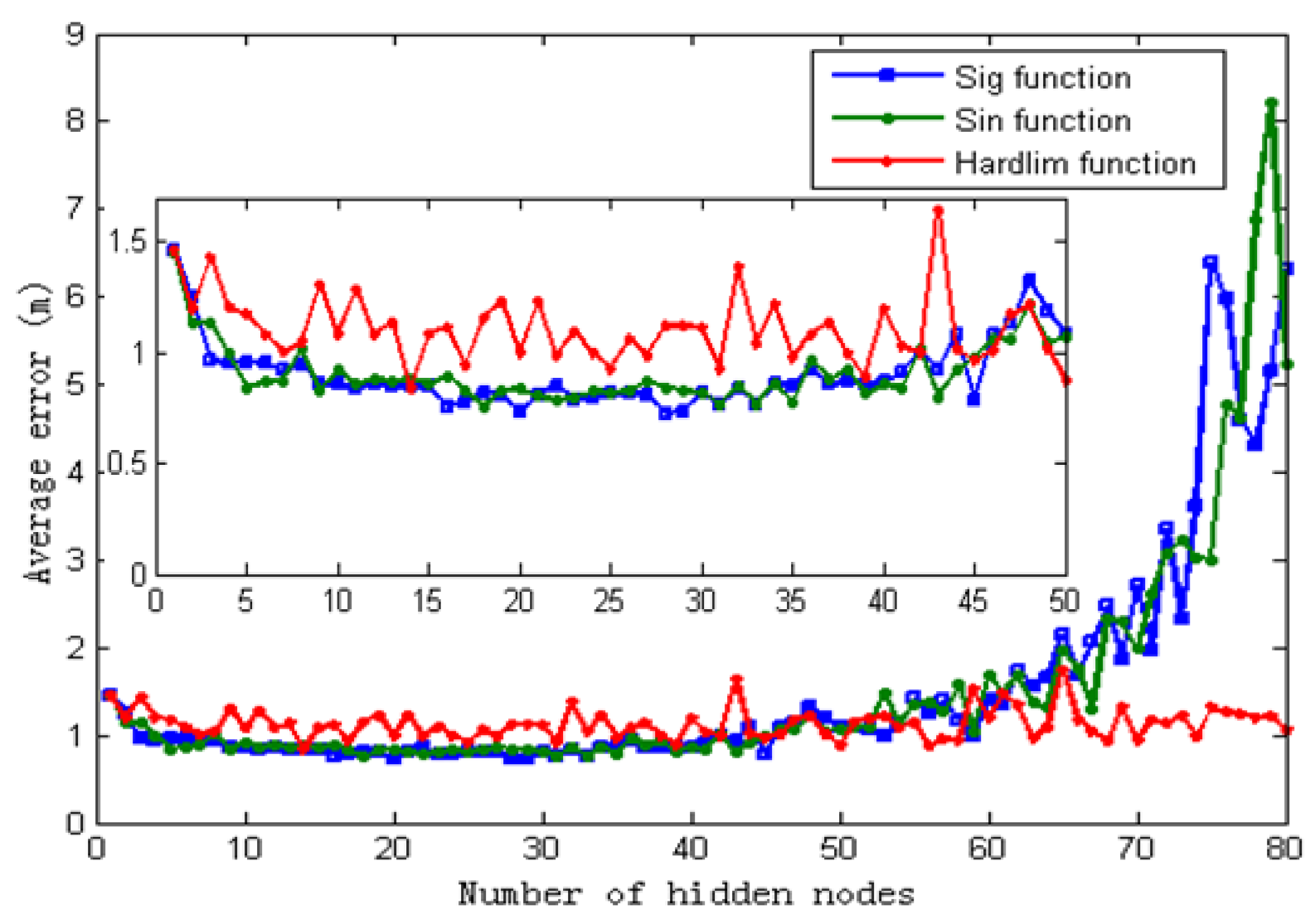
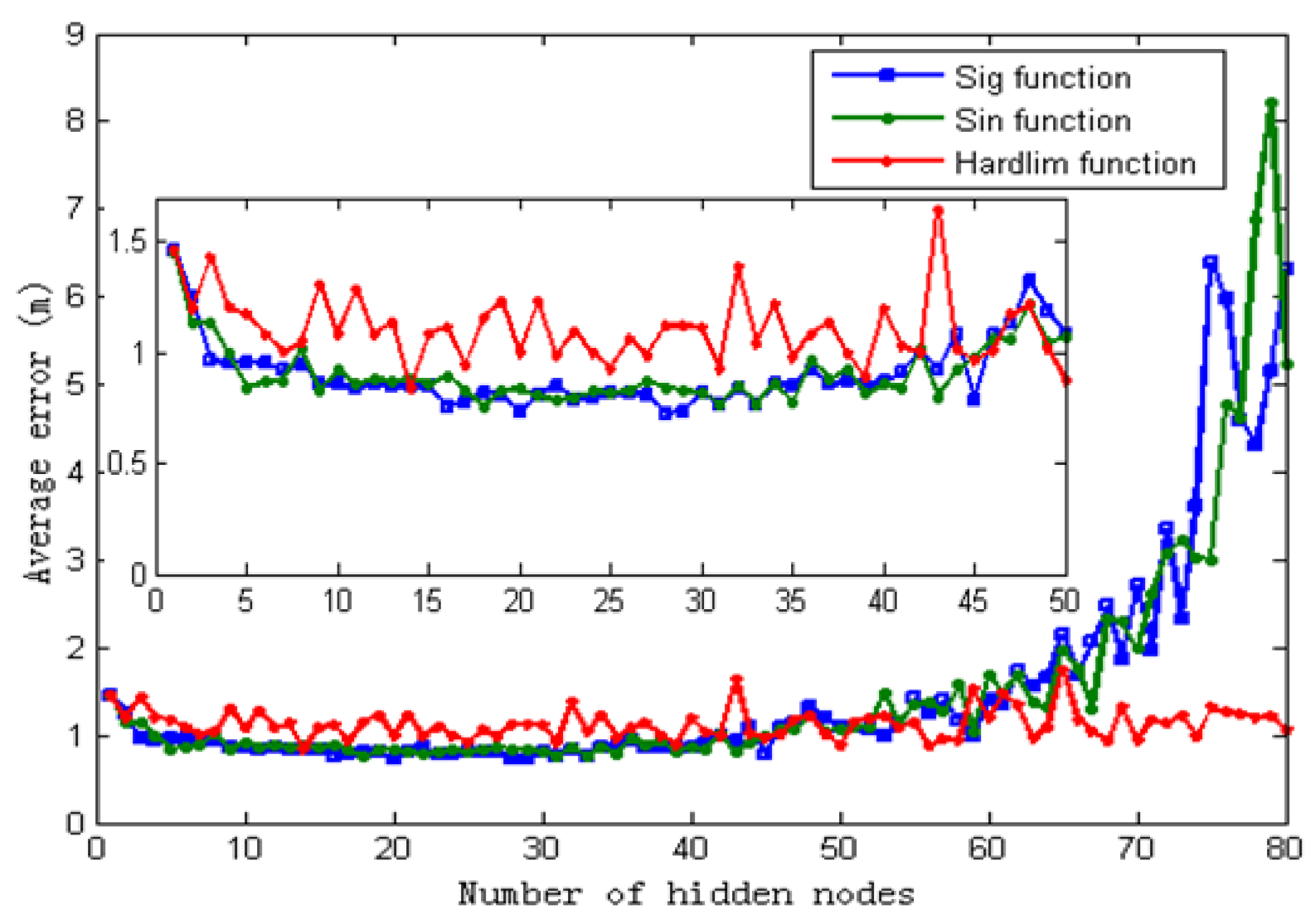
For the proposed ELM based positioning model, there are two important parameters that need to be selected, namely, the type of activation function
and the number of hidden nodes
. The sine activation function
, hardlim activation function
and sigmoid activation function
have been used to evaluate the performance of the ELM, with different numbers of hidden nodes. The results of the parameter selection of the optimal number of hidden nodes for ELM with sigmoid, sine and hardlim activation functions are shown in
Figure 10.
In
Figure 10, the performance of ELM with the sigmoid activation function is not significantly changed with respect to the sine activation function. For the sigmoid functions, the increased amplitude of average error is relatively small when the number of hidden nodes was more than 60. In addition, the performance of the hardlim function is the most stable among the three activation functions, but the average error is the worst. Thus, in the following simulations, we selected the sigmoid function as the activation function of ELM, with the number of hidden nodes
set to 28, as shown in
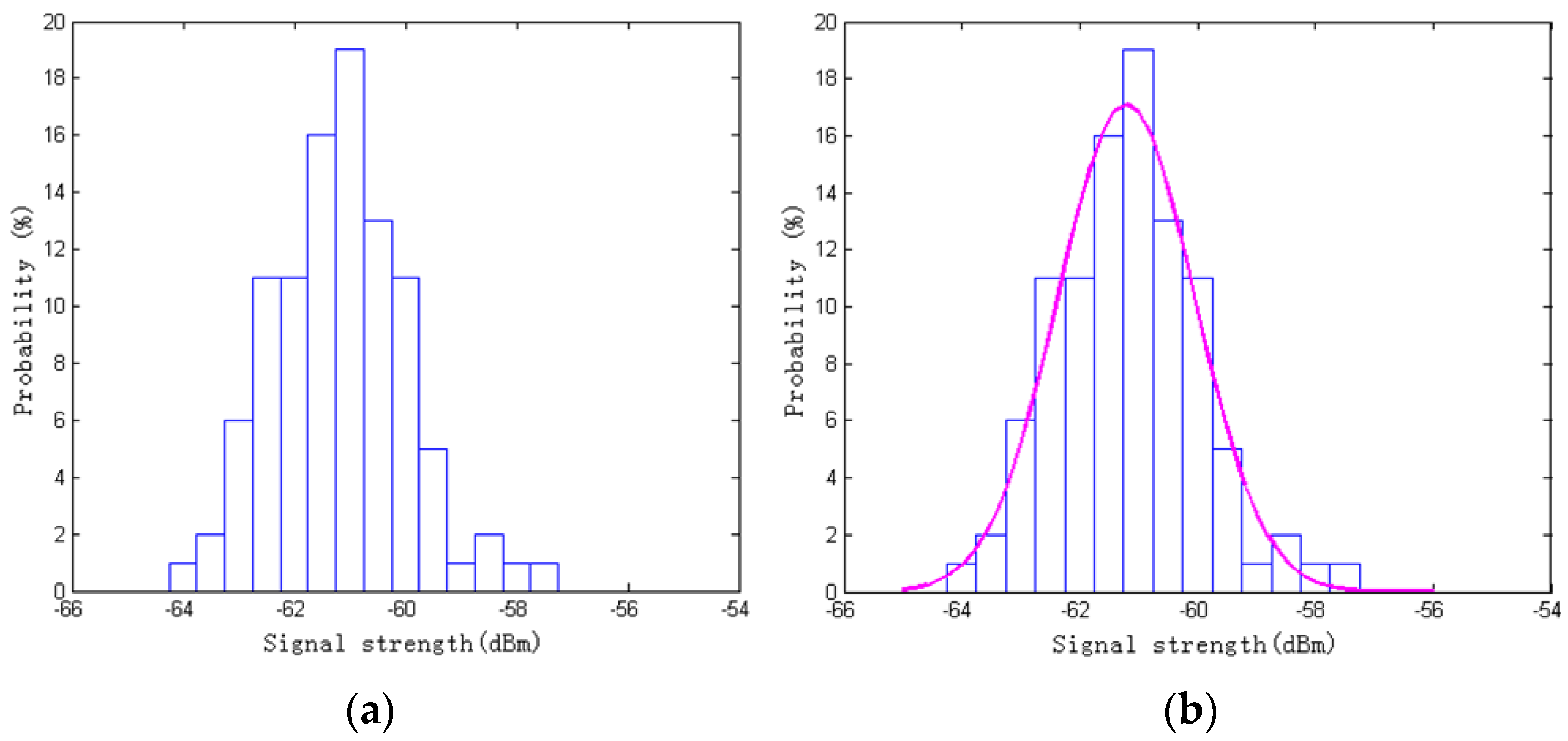
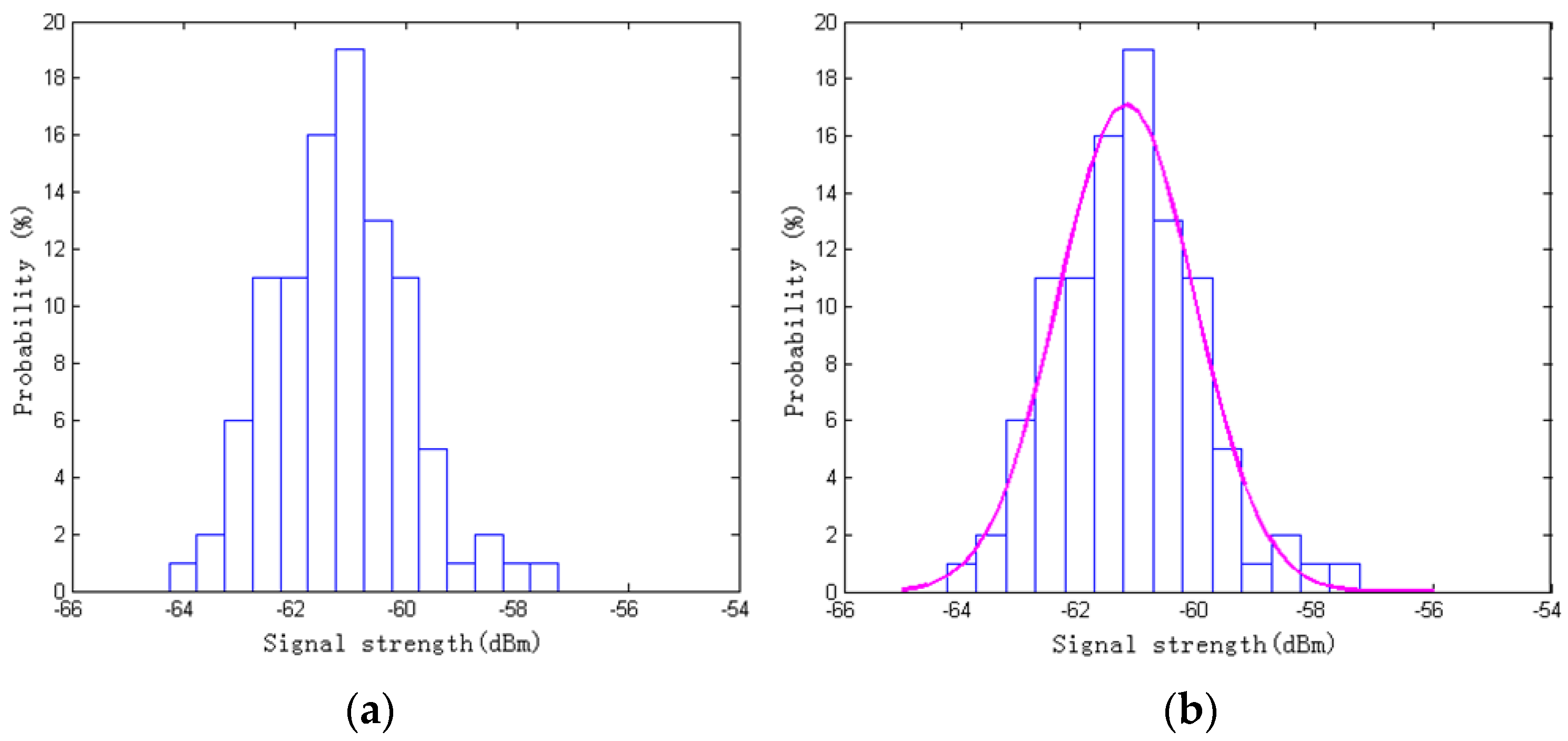
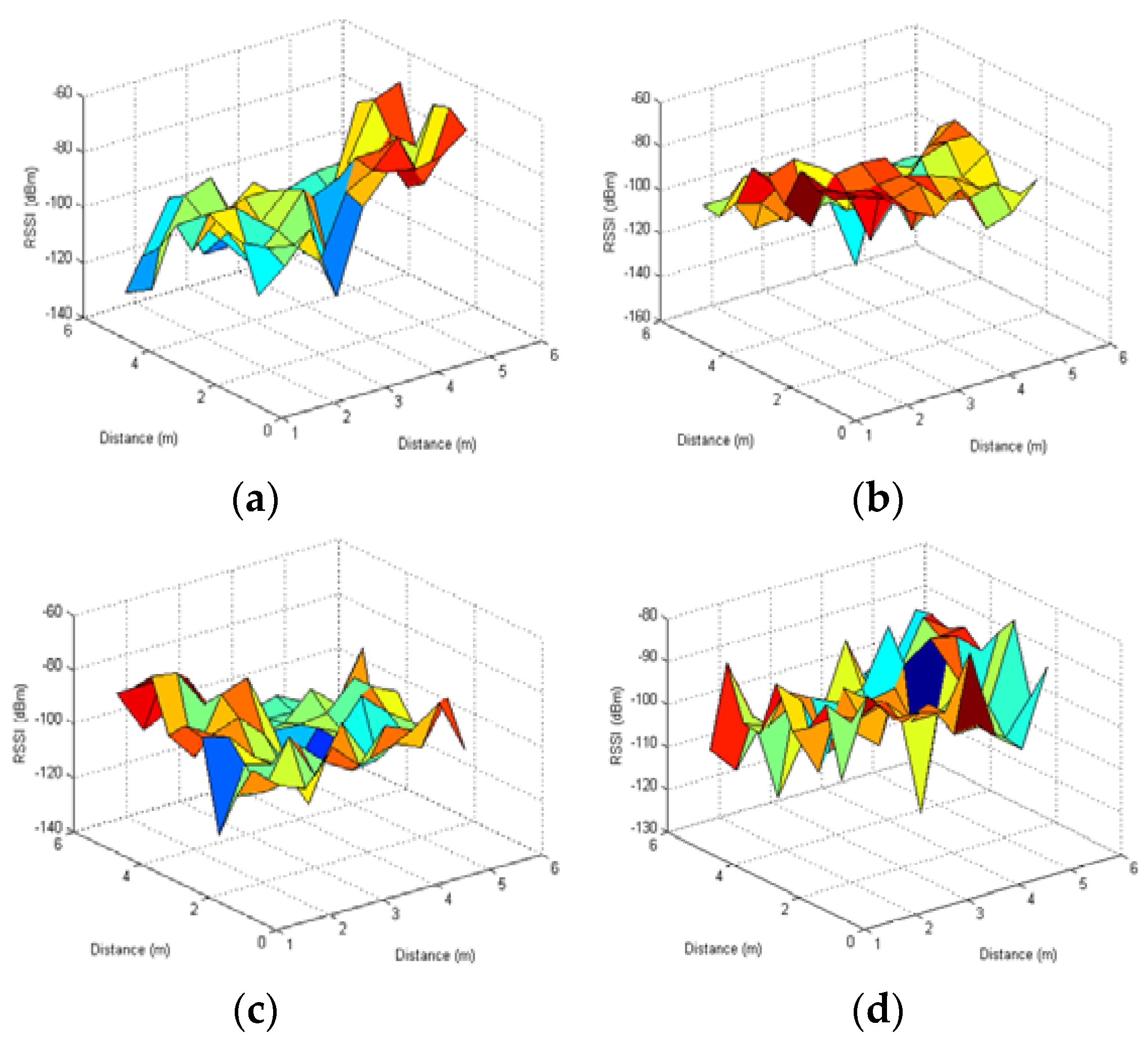
Table 1. The distribution of RSSI indication from four readers in the experiment is illustrated in
Figure 11.
As shown in
Figure 11, the signals collected by one reader can be quite different even at the same location due to noises and RSSI fluctuations in the indoor environment.
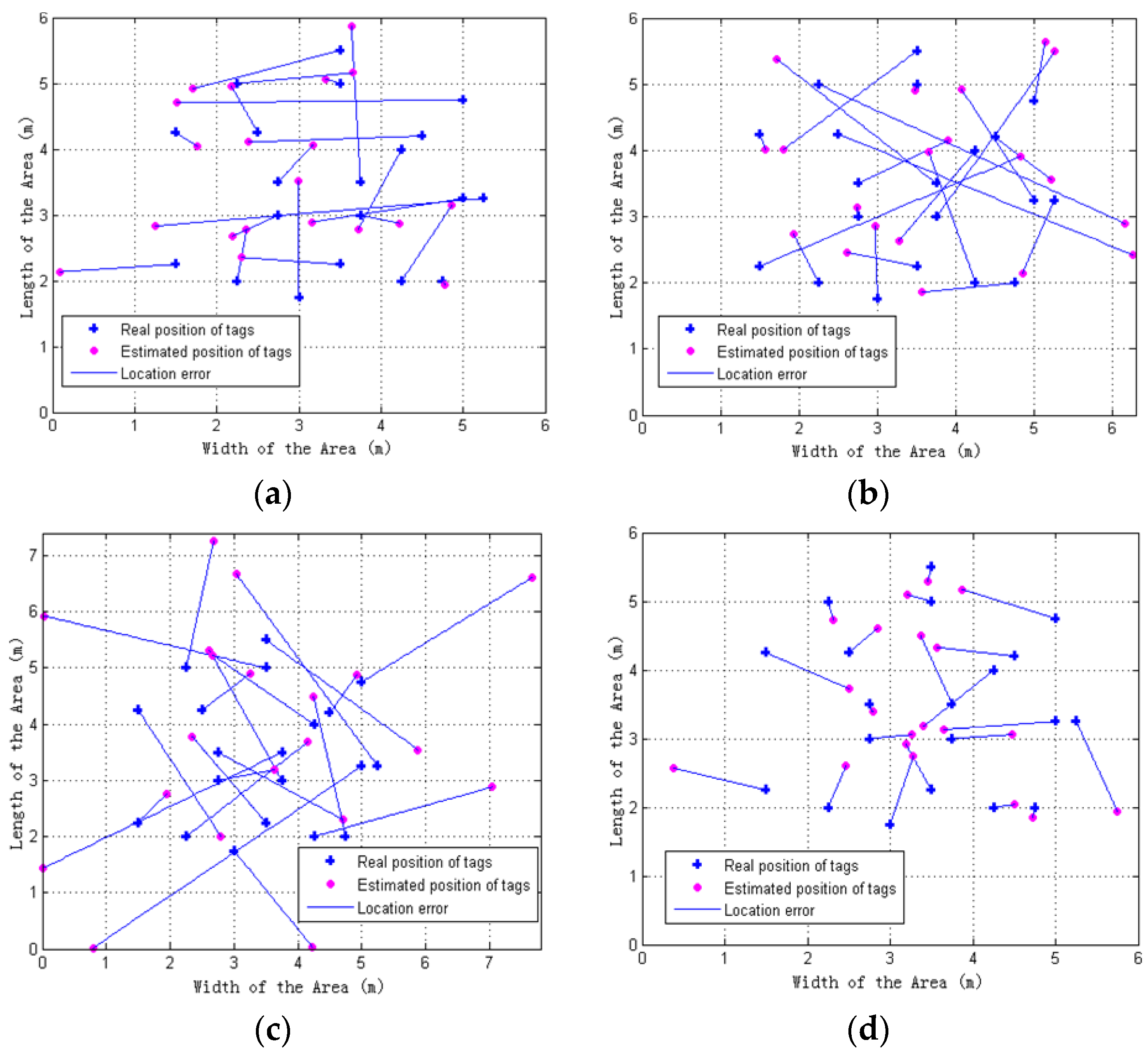
4.3. Comparison of Data Quality
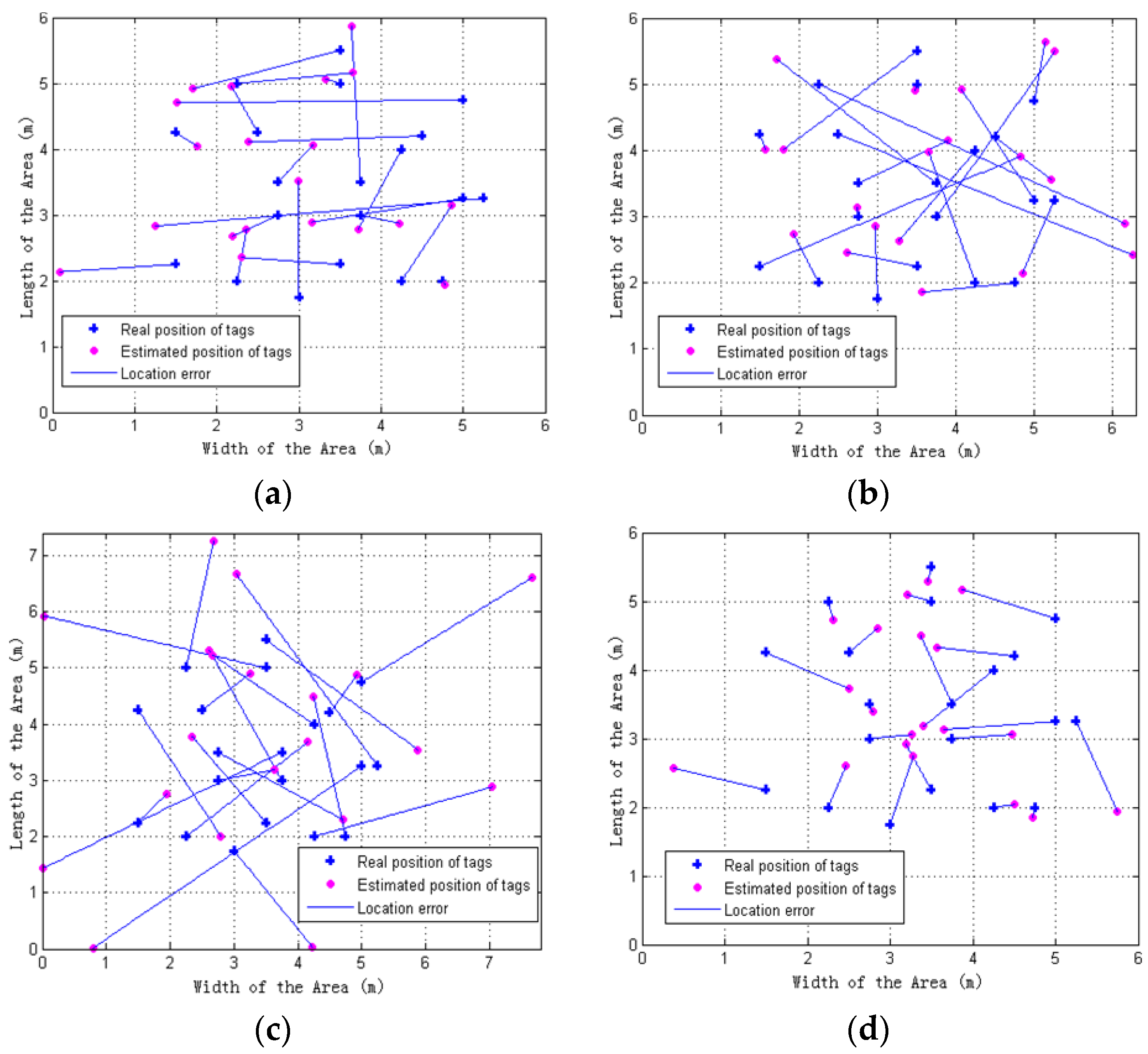
As depicted in
Section 3.1, it is seen that the data Gaussian filtering method in the offline and online phases improved the quality of the training data and the model input data, respectively. In order to analyze the influence of the data quality on the precision of the positioning model based on ELM, this study uses the four different scenes, and the algorithm is repeated 10 times in each scenario experiment. The details are as follows and the results of location estimation for impact of data quality on the positioning model is shown in
Figure 12.
Table 2 summarizes the positioning results in different scenes.
Case 1. In the offline phase, does not filter the training samples; in the online phase, does not filter the test samples for the RSSI information of each tags, and it is used as the input of the model.
Case 2. In the offline phase, does not filter the training samples; however, in the online phase, for the RSSI information of every tag, the reader repeated measurements 100 times at a fixed point, used the Gaussian filter for the collected RSSI, and then used the results as the input of the model.
Case 3. In the offline phase, filtering the training samples according to the corresponding rules in this study; in the online phase, does not filter the test samples for the RSSI information of every tag, and it is used as the input of the model.
Case 4. In the offline phase, filtering the training samples according to the corresponding rules in this study; however, in the online phase, for the RSSI information of every tag, the reader repeated measurements 100 times at a fixed point, used the Gaussian filter for the collected RSSI, and then used the results as the input of the model.
As observed from
Table 2,
Case 4 has the smallest average error and MSE values—0.7114 and 1.0562, respectively, while
Case 3 has the largest average error and MSE values—2.4641 and 3.3730 respectively. Therefore, data filtering in the offline training phase and in the online positioning phase can effectively improve the positioning accuracy of the model. However, we found that, when the positioning model comes from high quality training samples, the input data for online positioning phase also need to be high quality.
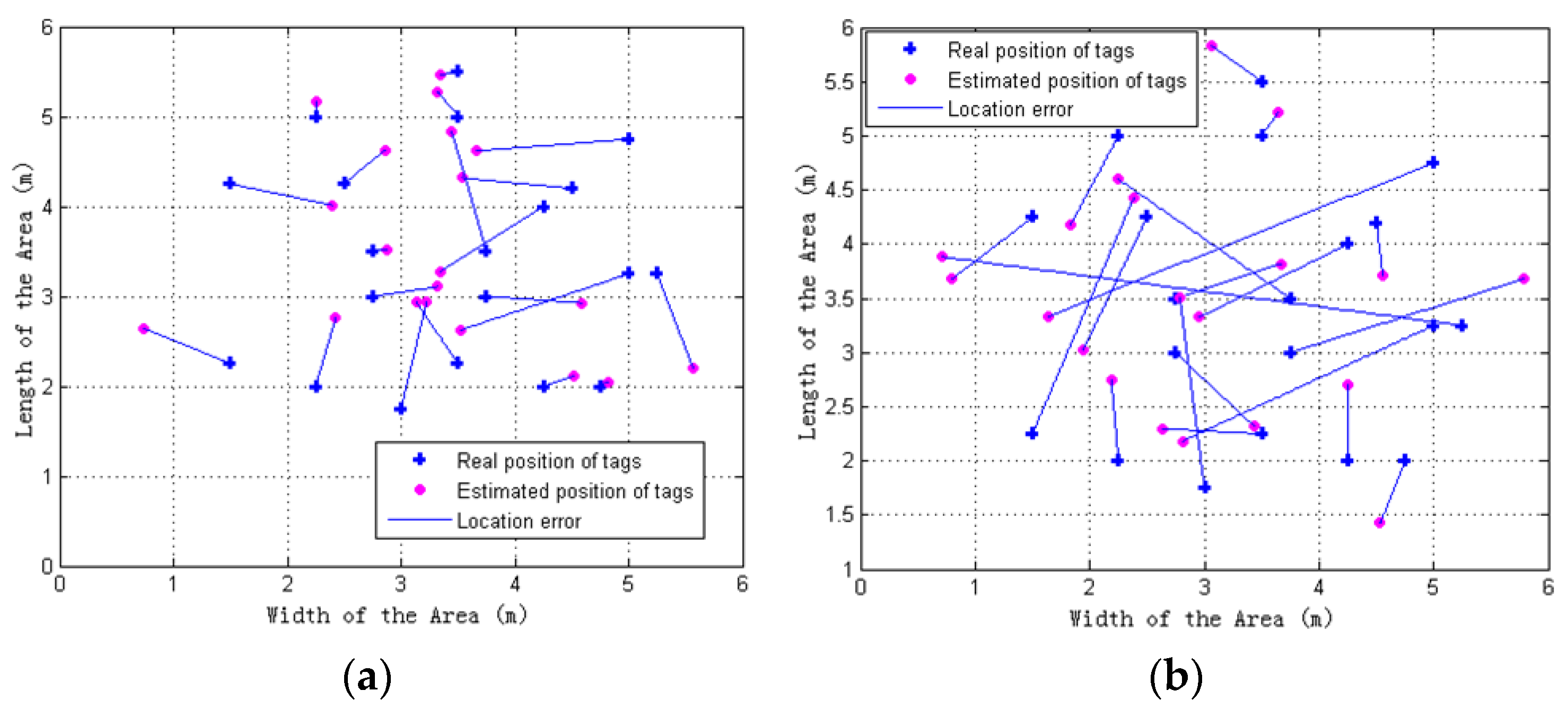
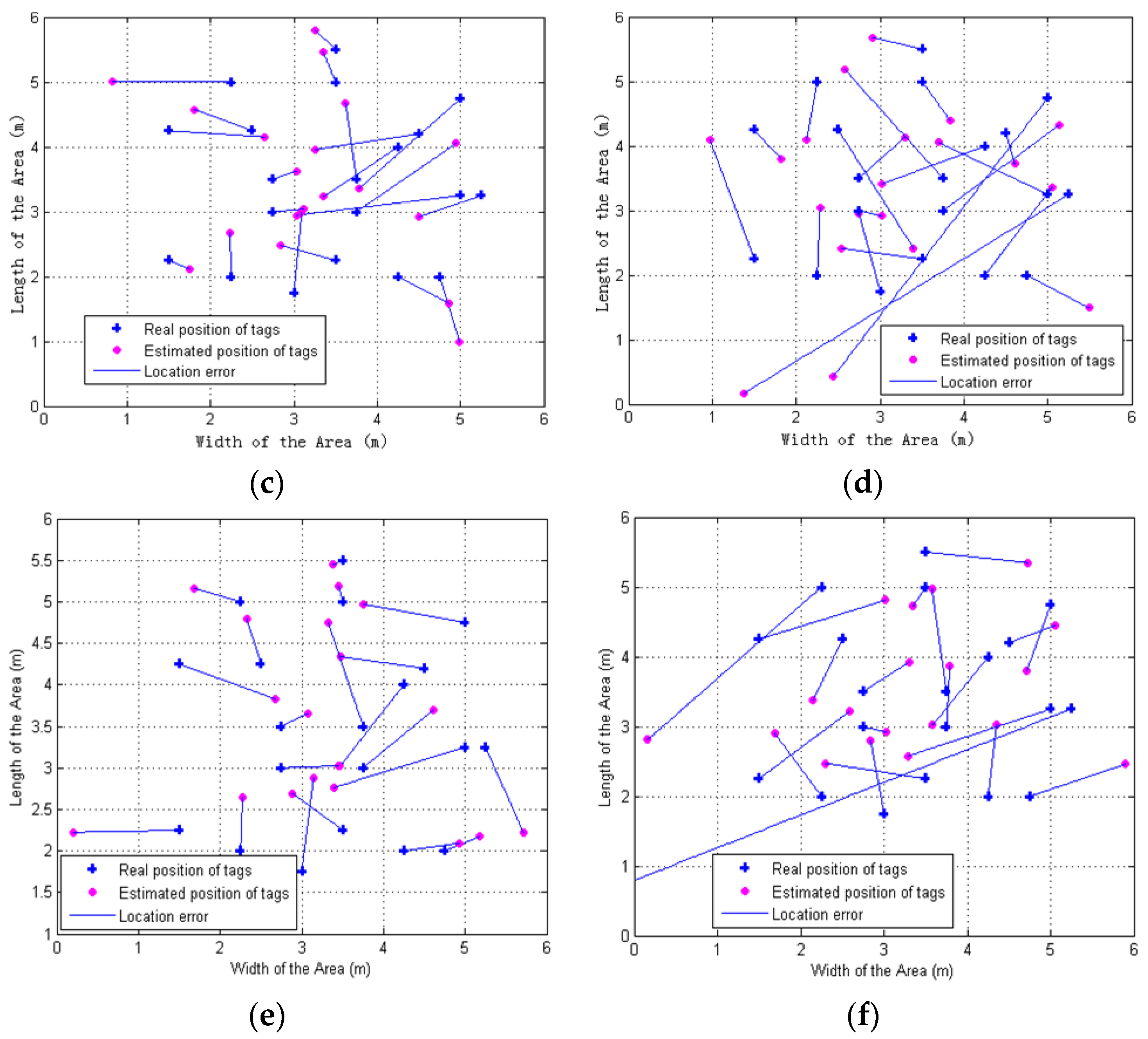
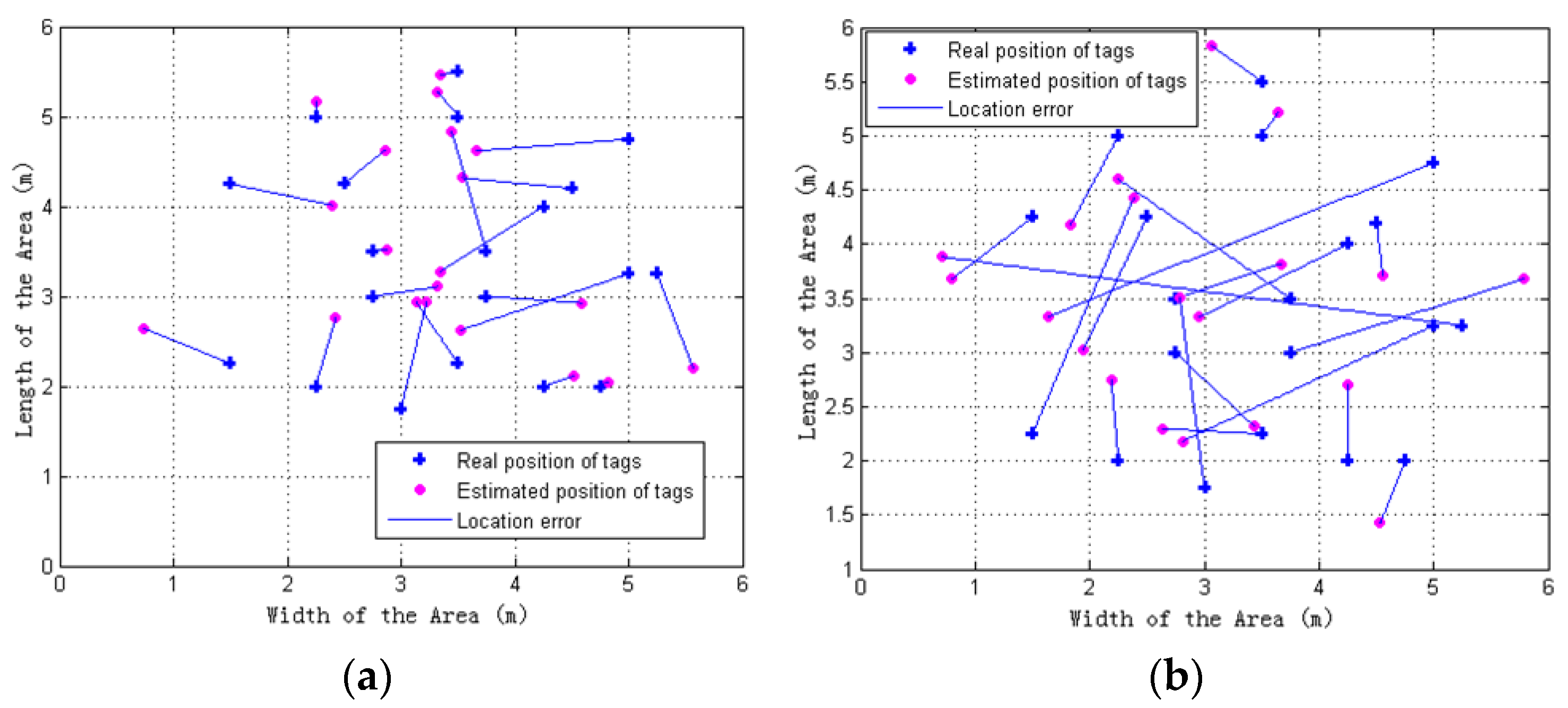
4.4. Comparison with Other Algorithms
This section aims to further evaluate the performance of the proposed algorithm. The GA-BP, PSO-BP positioning method [
30,
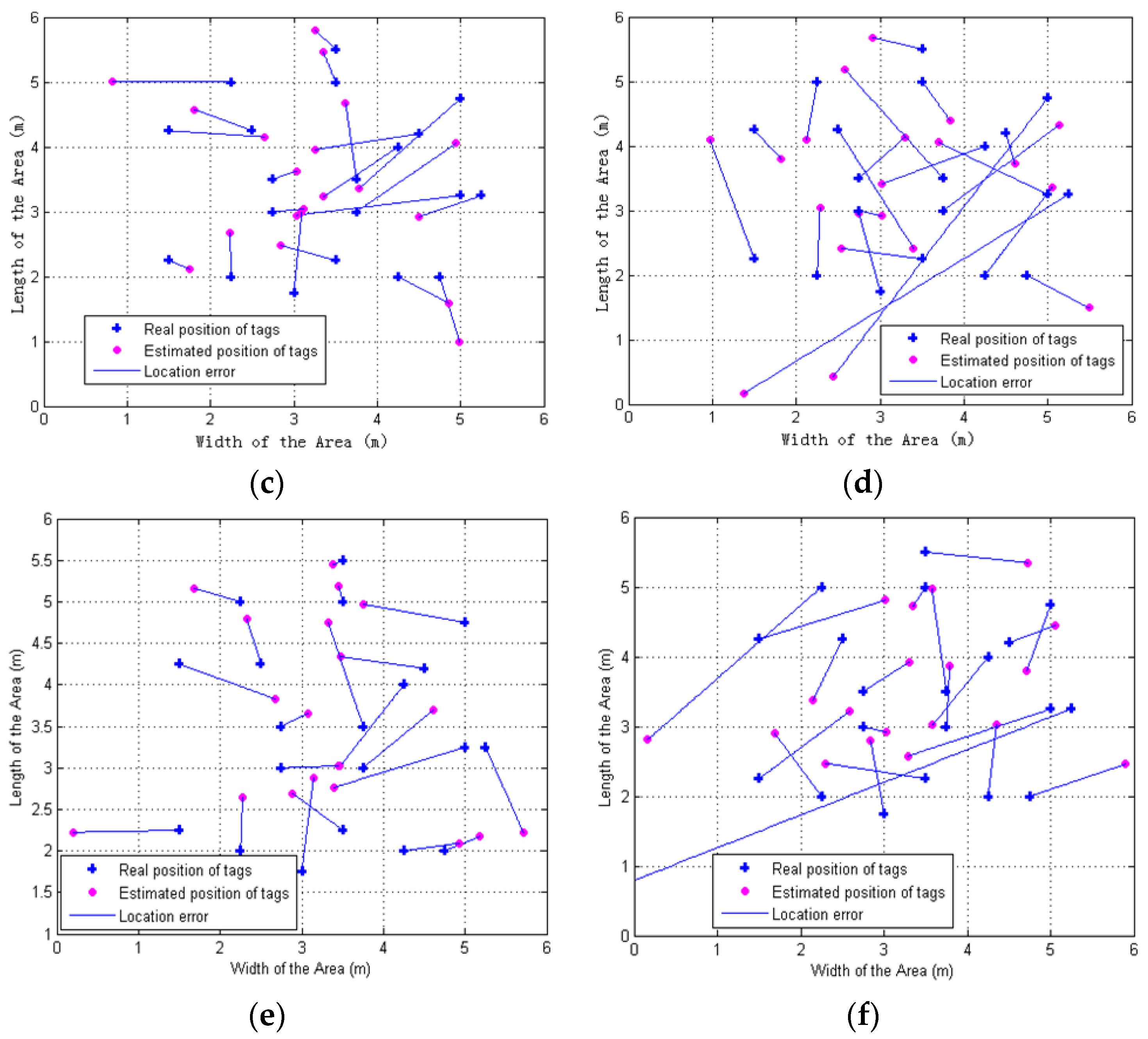
31] with no filtering training and testing samples are implemented and compared, respectively, and the evaluation criteria include the positioning error and algorithm running time. Since the same ANN structure and the same training set might draw a different result, each positioning algorithm run 10 times repeatedly. The results of location estimation for different positioning methods are presented in
Figure 12, and the positioning error results are summarized in
Table 3.
4.4.1. Positioning Error
It can be seen from
Figure 13 and
Table 3 that the positioning accuracy of the proposed ELM-Gaussian filtering method is obviously superior to other five methods such as ELM (without Gaussian filtering), GA-BP-Gaussian filtering (include filtering training and testing samples) and GA-BP (without Gaussian filtering), PSO-BP-Gaussian filtering (include filtering training and testing samples) and PSO-BP (without Gaussian filtering). ELM-Gaussian filtering enhances the average positioning error by 47.05% over ELM, 22.18% over GA-BP-Gaussian filtering, 47.47% over GA-BP, 12.68% over PSO-BP-Gaussian filtering, 55.69% over PSO-BP, GA-BP-Gaussian filtering enhances the average positioning error by 32.50% over GA-BP, and PSO-BP-Gaussian filtering enhances the average positioning error by 49.26% over PSO-BP. However, the ELM (without Gaussian filtering) and the GA-BP (without Gaussian filtering) provide similar average positioning error, which is 1.3237 m and 1.3343 m, respectively.
Therefore, effective data filtering (including filtering training and test samples) can greatly improve the positioning accuracy based on machine learning methods, and the average positioning accuracy of the ELM method is better than the GA-BP and PSO-BP method.
4.4.2. Computational Time
In order to further evaluate the performance of the proposed algorithm, the efficiency of three machine learning algorithms (ELM, GA-BP and PSO-BP) based on positioning was compared, and each positioning algorithm ran three times continuously.
Table 4 and
Table 5 list the parameters of GA-BP and PSO-BP algorithms based on positioning, respectively, and
Table 6 lists the computational time for three algorithms. In terms of computational time, as observed from
Table 6, ELM requires at most 0.5156 s in the training phase, reducing the training time over GA-BP (4.2998 s) by a factor of 8, and reducing the training time over PSO-BP (3.9891 s) by a factor of 7, and ELM requires at most 0.1078 s in the testing phase, reducing the testing time over GA-BP (1.5326 s) by a factor of 1, and reducing the testing time over PSO-BP (1.5198) by a factor of 2. This demonstrates that the ELM algorithm is superior to the GA-BP and PSO-BP learning algorithms in the RFID-enabled positioning systems, since the core of ELM is to transform the complex iterative process into the random generation of hidden layer parameters.
6. Conclusions
The data qualities of the online and offline phases are analyzed, respectively, which shows that the high quality positioning model can obviously improve the accuracy of indoor positioning. In addition, the time consumption of indoor positioning is also analyzed and compared, and the proposed algorithm estimates the current coordinate of the tag by building the ELM positioning model combined with the RSSI measurement values and achieves a rapid positioning.
In this study, to solve the inaccurate localization and efficiency problems in a complex positioning system, an ELM algorithm based on Gaussian filtering is proposed, which introduces the Gaussian filtering rule and can effectively filter out the significant fluctuant signals that are caused by the environment effects, and provide a high quality sample data. The proposed ELM-Gaussian filtering methods can quickly establish a high quality positioning model and achieve a fast position prediction. The experimental results demonstrate that the proposed positioning system will contribute by effectively avoiding the environment interferences and achieving the highest accuracy and efficiency in all comparative methods.
Future research directions will be concerned with the following issues. Firstly, different scenarios can be implemented for testing the robustness of the proposed algorithm. Secondly, other wireless communication network-based localization methods will be tested for their feasibilities in the complex and dynamic experimental environment.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}