Research Using Virtual Reality: Mobile Machinery Safety in the 21st Century

Abstract
:
1. Introduction

2. Methods and Results
2.1. Field Studies


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Posture Category | Neck (%) | Trunk (%) | ||||
|---|---|---|---|---|---|---|
| Combined risk of postures and vibration while engaging the forks (duration of 277 s) | ||||||
| Awkward | 26% | 22% | 3% | 10% | 9% | 1% |
| Moderate | 9% | 6% | 1% | 13% | 11% | 2% |
| Neutral | 18% | 13% | 2% | 30% | 21% | 3% |
| Low | Medium | High | Low | Medium | High | |
| Vibration | Vibration | |||||
| Combined risk of postures and vibration while driving forward loaded (duration of 167 s) | ||||||
| Awkward | 36% | 26% | 8% | 21% | 16% | 5% |
| Moderate | 13% | 6% | 2% | 17% | 12% | 4% |
| Neutral | 4% | 3% | 2% | 15% | 8% | 3% |
| Low | Medium | High | Low | Medium | High | |
| Vibration | Vibration | |||||
| Combined risk of postures and vibration while driving backward loaded (duration of 188 s) | ||||||
| Awkward | 34% | 21% | 17% | 23% | 16% | 16% |
| Moderate | 11% | 5% | 1% | 10% | 4% | 2% |
| Neutral | 7% | 3% | 1% | 18% | 9% | 2% |
| Low | Medium | High | Low | Medium | High | |
| Vibration | Vibration | |||||
| Combined risk of postures and vibration while driving forward unloaded (duration of 165 s) | ||||||
| Awkward | 11% | 8% | 7% | 5% | 5% | 3% |
| Moderate | 11% | 10% | 9% | 9% | 9% | 7% |
| Neutral | 16% | 15% | 13% | 24% | 19% | 19% |
| Low | Medium | High | Low | Medium | High | |
| Vibration | Vibration | |||||
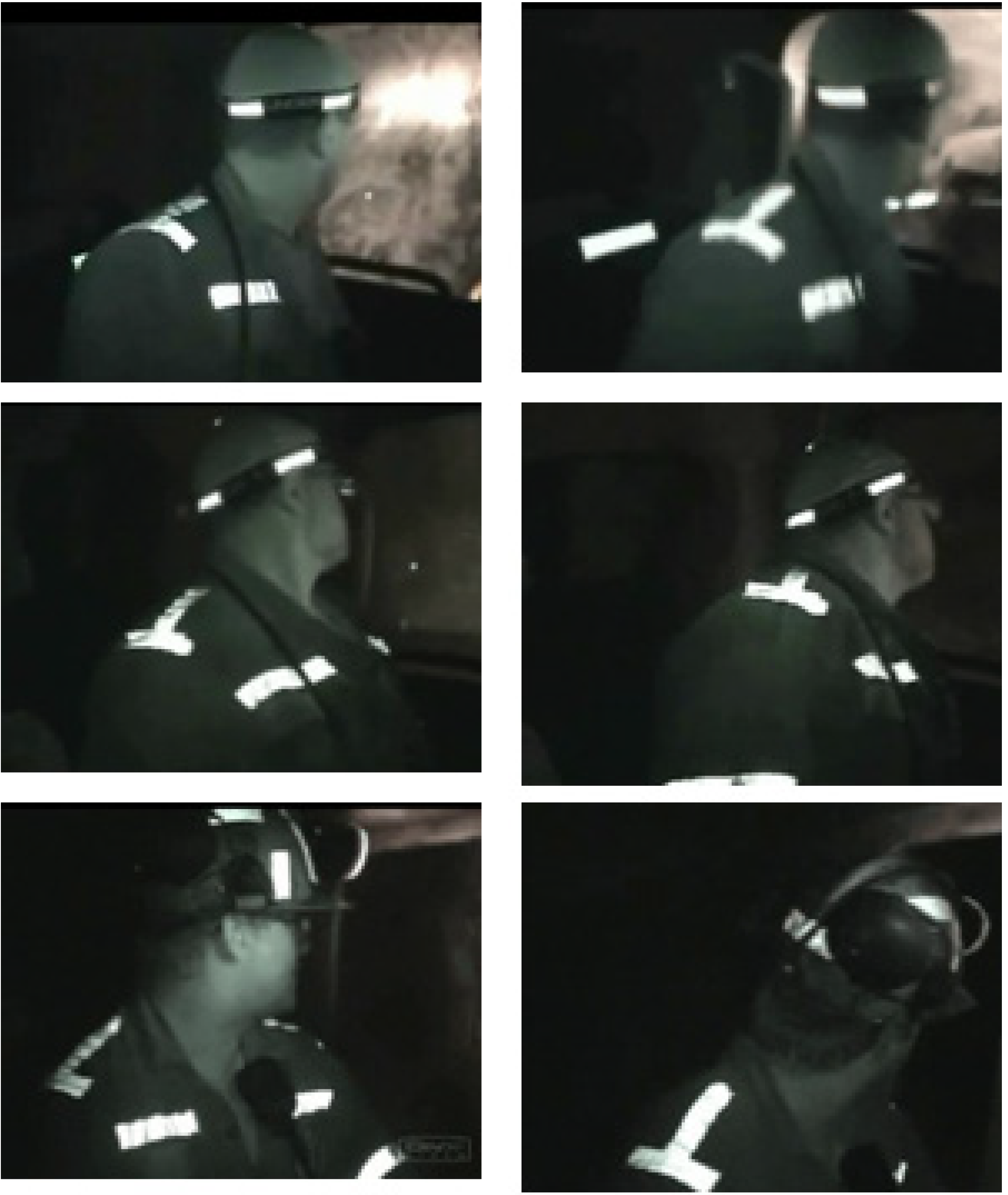
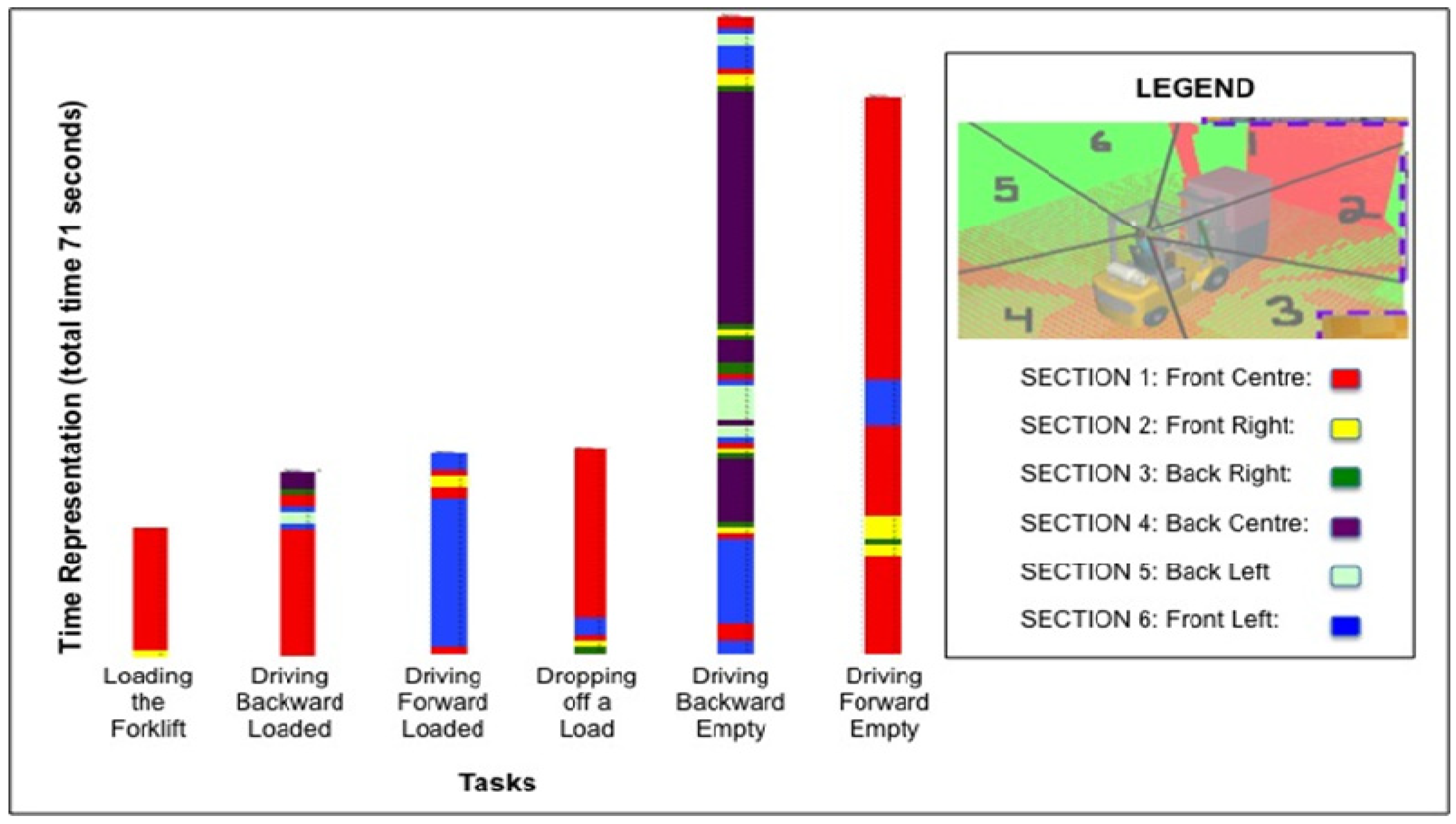
2.1.1. Operator Point of Regard: Eye-Tracking
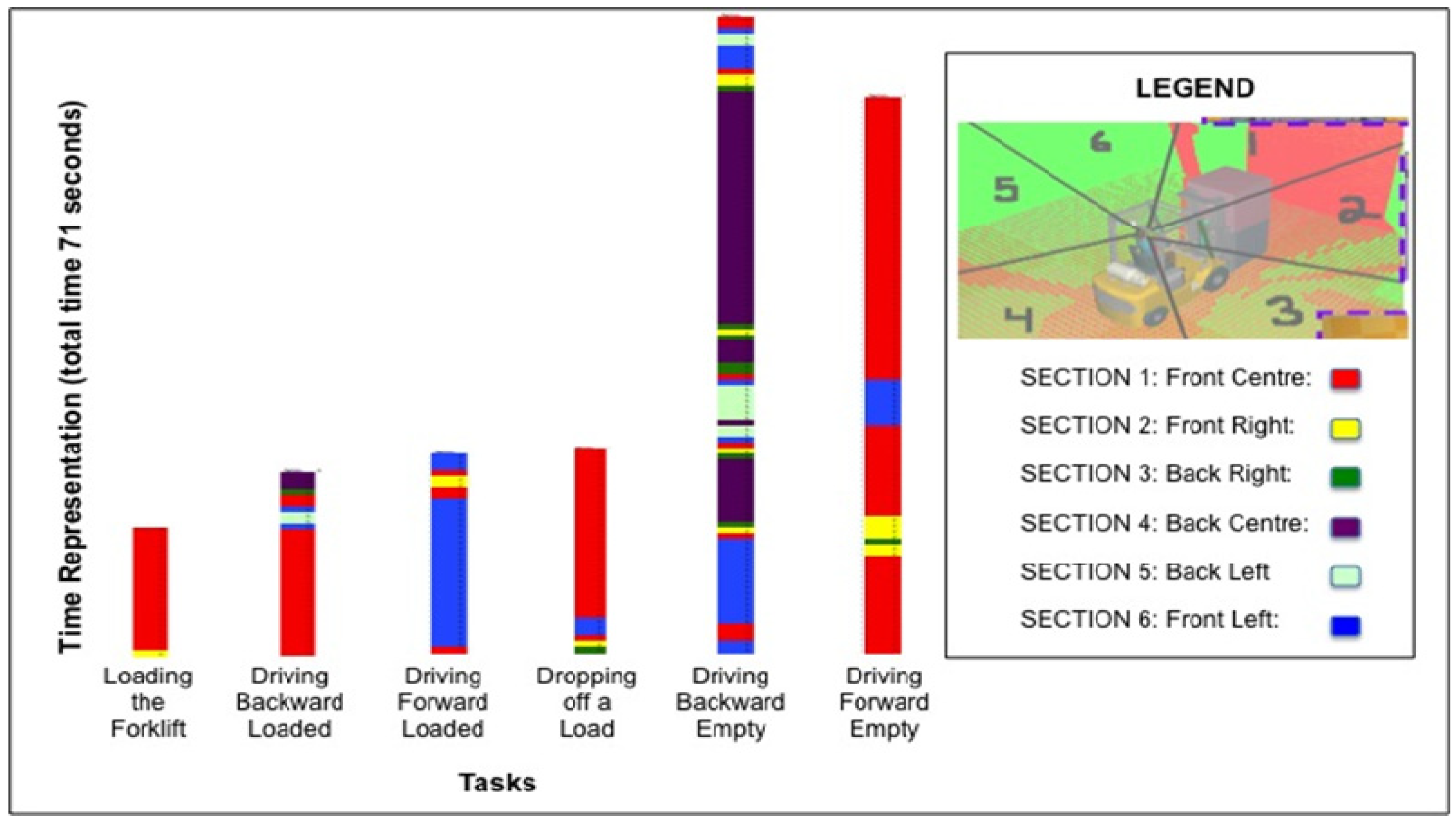
| Task | Sections | |||||
|---|---|---|---|---|---|---|
| % of time looking to each section | ||||||
| 1 | 2 | 3 | 4 | 5 | 6 | |
| Driving Forward-Empty | 91.3 | 2.5 | 0.4 | 0.0 | 0.0 | 5.8 |
| Driving Forward-Loaded | 25.0 | 17.1 | 0.0 | 0.0 | 0.0 | 57.9 |
| Driving Backward-Empty | 30.2 | 4.5 | 6.6 | 31.3 | 19.4 | 8.0 |
| Driving Backward-Loaded | 6.6 | 9.1 | 12.4 | 45.6 | 7.3 | 19.0 |
| Loading the Forklift | 87.6 | 10.5 | 1.0 | 0.0 | 0.0 | 1.0 |
| Dropping off a Load | 70.6 | 4.7 | 1.2 | 0.0 | 3.5 | 20.0 |
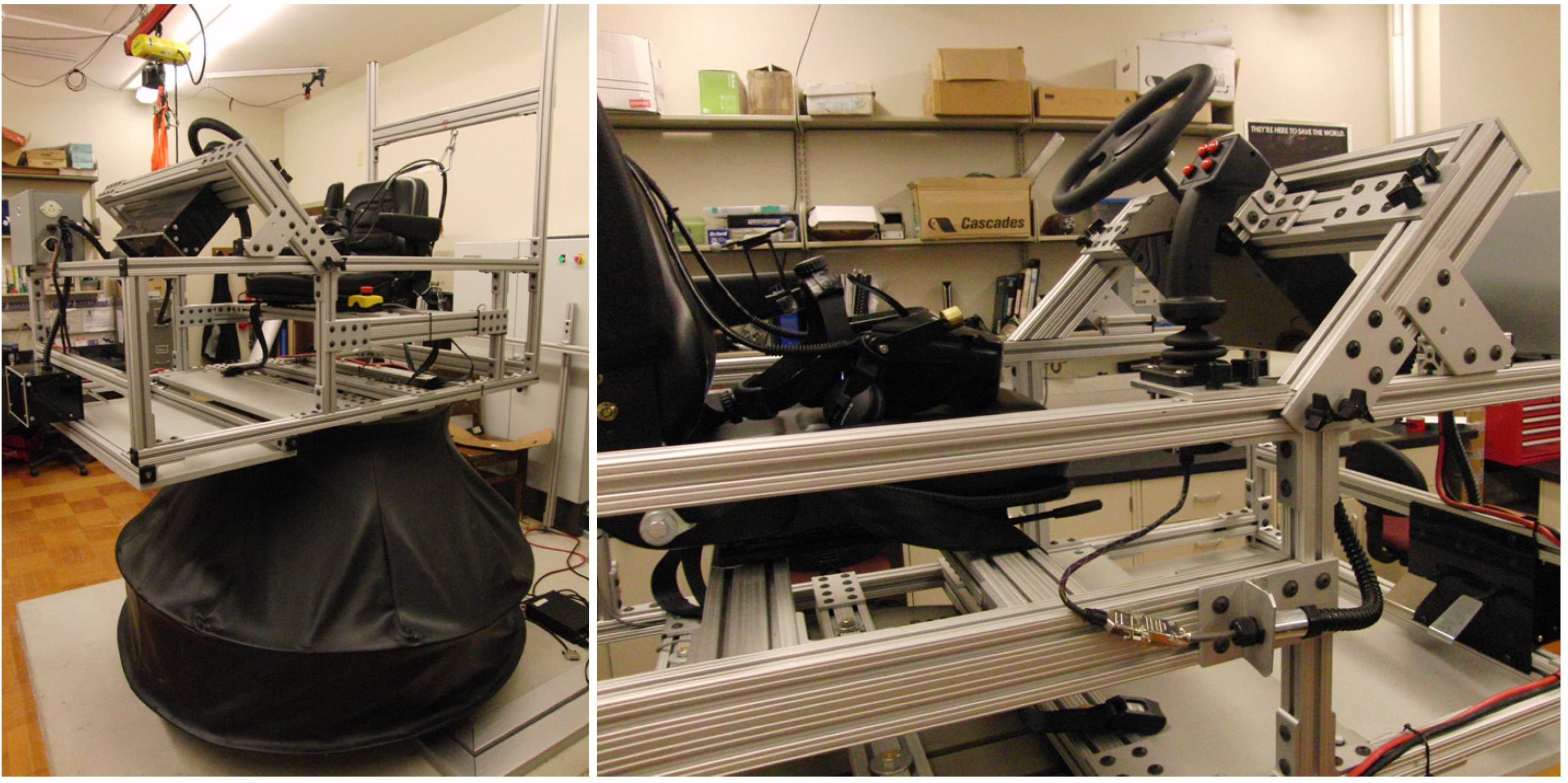
2.2. Laboratory Studies

2.3. Verification
3. Discussion
4. Future Directions
5. Conclusions
Acknowledgments
References
- Boshuizen, H.C.; Bongers, P.M.; Hulshof, C.T. Self-reported back pain in tractor drivers exposed to whole-body vibration. Int. Arch. Occup. Environ. Health 1990, 62, 109–115. [Google Scholar] [CrossRef]
- Punnett, L.; Pruss-Utun, A.; Nelson, D.I.; Fingerhut, M.A.; Leigh, J.; Tak, S.; Phillips, S. Estimating the global burden of low back pain attributable to combined occupational exposures. Am. J. Ind. Med. 2005, 48, 459–469. [Google Scholar] [CrossRef]
- Waters, T.; Genaidy, A.; Viruet, H.B.; Makola, M. The impact of operating heavy equipment vehicles on lower back disorders. Ergonomics 2008, 51, 602–636. [Google Scholar] [CrossRef]
- Bovenzi, M. Low back pain disorders and exposure to whole-body vibration in the workplace. Semin. Perinatol. 1996, 20, 38–53. [Google Scholar] [CrossRef]
- Wasserman, D.E.; Wilder, D.G.; Pope, M.H.; Magnusson, M.; Aleksiev, A.R.; Wasserman, J.F. Whole-body vibration exposure and occupational work-hardening. J. Occup. Environ. Med. 1997, 39, 403–407. [Google Scholar] [CrossRef]
- Bovenzi, M.; Hulshof, C.T. An updated review of epidemiologic studies on the relationship between exposure to whole-body vibration and low back pain (1986–1997). Int. Arch. Occup. Environ. Health 1999, 72, 351–365. [Google Scholar] [CrossRef]
- Lings, S.; Leboeuf-Yde, C. Whole-body vibration and low back pain: A systematic, critical review of the epidemiological literature 1992–1999. Int. Arch. Occup. Environ. Health 2000, 73, 290–297. [Google Scholar] [CrossRef]
- Boileau, P.E.; Rakheja, S. Vibration attenuation performance of suspension seats for off-road forestry vehicles. Int. J. Ind. Ergon. 1990, 5, 275–291. [Google Scholar] [CrossRef]
- Cann, A.P.; Salmoni, A.W.; Vi, P.; Eger, T.R. An exploratory study of whole-body vibration exposure and dose while operating heavy equipment in the construction industry. Appl. Occup. Environ. Hyg. 2003, 18, 999–1005. [Google Scholar] [CrossRef]
- Eger, T.; Salmoni, A.; Cann, A.; Jack, R. Whole-body vibration exposure experienced by mining equipment operators. Occup. Ergon. 2006, 6, 121–127. [Google Scholar]
- Els, P.S. The applicability of ride comfort standards to off-road vehicles. J. Terramech. 2005, 42, 47–64. [Google Scholar] [CrossRef]
- Sherwin, L.M.; Owende, P.M.; Kanali, C.L.; Lyons, J.; Ward, S.M. Influence of tyre inflation pressure on whole-body vibrations transmitted to the operator in a cut-to-length timber harvester. Appl. Ergon. 2004, 35, 253–261. [Google Scholar] [CrossRef]
- Village, J.; Morrison, J.B.; Leong, D.K. Whole-body vibration in underground load-haul-dump vehicles. Ergonomics 1989, 32, 1167–1183. [Google Scholar] [CrossRef]
- Morrison, J.B.; Robinson, D.G.; Roddan, G.; Rylands, J.; Cameron, B.; Remedios, B.; Brown, B. Development of a Standard for the Health Hazard Assessment of Mechanical Shock and Repeated Impact in Army Vehicles—Phase 5; U.S. Army Aeromedical Research Laboratory: Fort Rucker, AL, USA, 1998. [Google Scholar]
- Kumar, S. Vibration in operating heavy haul trucks in overburden mining. Appl. Ergon. 2004, 35, 509–520. [Google Scholar] [CrossRef]
- Goglia, V.; Grbac, I. Whole-body vibration transmitted to the framesaw operator. Appl. Ergon. 2005, 36, 43–48. [Google Scholar] [CrossRef]
- Cation, S.; Jack, R.; Oliver, M.; Dickey, J.P.; Lee Shee, N.M. Six degree of freedom whole-body vibration during forestry skidder operations. Int. J. Ind. Ergon. 2008, 38, 739–757. [Google Scholar] [CrossRef]
- Conrad, L.F.; Oliver, M.L.; Jack, R.J.; Dickey, J.P.; Eger, T. Quantification of 6-degree-of-freedom chassis whole-body vibration in mobile heavy vehicles used in the steel making industry. J. Low Freq. Noise Vib. Act. Control 2012, 31, 85–104. [Google Scholar] [CrossRef]
- Jack, R.J.; Oliver, M.; Dickey, J.P.; Cation, S.; Hayward, G.; Lee-Shee, N. Six-degree-of-freedom whole-body vibration exposure levels during routine skidder operations. Ergonomics 2010, 53, 696–715. [Google Scholar] [CrossRef]
- ISO 2631–1: Mechanical Vibration and Shock–Evaluation of Human Exposure to Whole-Body Vibration–Part 1: General Requirements; International Standards Organization: Geneva, Switzerland, 1997.
- Mayton, A.G.; Amirouche, F.; Jobes, C.C. Comparison of seat designs for underground mine haulage vehicles using the absorbed power and ISO 2631–1(1985)-based ACGIH threshold limit methods. Int. J. Heavy Veh. Syst. 2005, 12, 225–238. [Google Scholar] [CrossRef]
- Eger, T.; Stevenson, J.M.; Grenier, S.; Boileau, P.E.; Smets, M.P. Influence of vehicle size, haulage capacity and ride control on vibration exposure and predicted health risks for LHD vehicle operators. J. Low Freq. Noise Vib. Act. Control 2011, 30, 45–62. [Google Scholar] [CrossRef]
- Smets, M.P.; Eger, T.R.; Grenier, S.G. Whole-body vibration experienced by haulage truck operators in surface mining operations: A comparison of various analysis methods utilized in the prediction of health risks. Appl. Ergon. 2010, 41, 763–770. [Google Scholar] [CrossRef]
- Mandal, B.; Srivastava, A. Musculoskeletal disorders in dumper operators exposed to whole body vibration at Indian mines. Int. J. Min. Reclam. Environ. 2010, 24, 233–243. [Google Scholar] [CrossRef]
- Vanerkar, A.P.; Kulkarni, N.P.; Zade, P.D.; Kamavisdar, A.S. Whole body vibration exposure in heavy earth moving machinery operators of metalliferrous mines. Environ. Monit. Assess. 2008, 143, 239–245. [Google Scholar] [CrossRef]
- Blood, R.P.; Ploger, J.D.; Yost, M.G.; Ching, R.P.; Johnson, P.W. Whole body vibration exposures in metropolitan bus drivers: A comparison of three seats. J. Sound Vib. 2010, 329, 109–120. [Google Scholar] [CrossRef]
- Cann, A.P.; Salmoni, A.W.; Eger, T.R. Predictors of whole-body vibration exposure experienced by highway transport truck operators. Ergonomics 2004, 47, 1432–1453. [Google Scholar] [CrossRef]
- Ozkaya, N.; Willems, B.; Goldsheyder, D. Whole-body vibration exposure: A comprehensive field study. Am. Ind. Hyg. Assoc. J. 1994, 55, 1164–1171. [Google Scholar] [CrossRef]
- Mani, R.; Milosavljevic, S.; Sullivan, S.J. The influence of body mass on whole-body vibration: A quad-bike field study. Ergon. Open J. 2011, 4, 1–9. [Google Scholar] [CrossRef]
- Hella, F.; Tisserand, M.; Schouller, J.F. Analysis of eye movements in different tasks related to the use of lift trucks. Appl. Ergon. 1991, 22, 101–110. [Google Scholar] [CrossRef]
- Eger, T.R.; Contratto, M.S.; Dickey, J.P. Influence of driving speed, terrain, seat performance and ride control on predicted health risk based on ISO 2631–1 and EU Directive 2002/44/EC. Low Freq. Noise Vib. Active Control 2011, 30, 291–312. [Google Scholar] [CrossRef]
- Trask, C.; Teschke, K.; Village, J.; Chow, Y.; Johnson, P.; Luong, N.; Koehoorn, M. Measuring low back injury risk factors in challenging work environments: An evaluation of cost and feasibility. Am. J. Ind. Med. 2007, 50, 687–696. [Google Scholar] [CrossRef]
- Horberry, T.; Burgess-Limerick, R.; Fuller, R. The contributions of human factors and ergonomics to a sustainable minerals industry. Ergonomics 2013, 56, 556–564. [Google Scholar] [CrossRef]
- Santos, B.R.; Lariviere, C.; Delisle, A.; Plamondon, A.; Boileau, P.E.; Imbeau, D. A laboratory study to quantify the biomechanical responses to whole-body vibration: The influence on balance, reflex response, muscular activity and fatigue. Int. J. Ind. Ergon. 2008, 38, 626–639. [Google Scholar] [CrossRef]
- Hansson, T.; Magnusson, M.; Broman, H. Back muscle fatigue and seated whole body vibrations: An experimental study in man. Clin. Biomech. 1991, 6, 173–178. [Google Scholar] [CrossRef]
- Pope, M.H.; Wilder, D.G.; Magnusson, M. Possible mechanisms of low back pain due to whole-body vibration. J. Sound Vib. 1998, 215, 687–697. [Google Scholar] [CrossRef]
- Kittusamy, N.K.; Buchholz, B. Whole-body vibration and postural stress among operators of construction equipment: A literature review. J. Saf. Res. 2004, 35, 255–261. [Google Scholar] [CrossRef]
- Van Oostrom, S.H.; Verschuren, M.; de Vet, H.C.; Boshuizen, H.C.; Picavet, H.S. Longitudinal associations between physical load and chronic low back pain in the general population: The doetinchem cohort study. Spine 2012, 37, 788–796. [Google Scholar] [CrossRef]
- Delleman, N.; Dul, J. International standards on working postures and movements ISO 11226 and EN 1005–4. Ergonomics 2007, 50, 1809–1819. [Google Scholar] [CrossRef]
- Hagberg, M.; Wegman, D.H. Prevalence rates and odds ratios of shoulder-neck diseases in different occupational groups. Br. J. Ind. Med. 1987, 44, 602–610. [Google Scholar]
- Akesson, I.; Hansson, G.A.; Balogh, I.; Moritz, U.; Skerfving, S. Quantifying work load in neck, shoulders and wrists in female dentists. Int. Arch. Occup. Environ. Health 1997, 69, 461–474. [Google Scholar] [CrossRef]
- Jensen, B.R.; Schibye, B.; Sogaard, K.; Simonsen, E.B.; Sjogaard, G. Shoulder muscle load and muscle fatigue among industrial sewing-machine operators. Eur. J. Appl. Physiol. Occup. Physiol. 1993, 67, 467–475. [Google Scholar] [CrossRef]
- Toren, A. Muscle activity and range of motion during active trunk rotation in a sitting posture. Appl. Ergon. 2001, 32, 583–591. [Google Scholar] [CrossRef]
- Van Dieen, J.H. Asymmetry of erector spinae muscle activity in twisted postures and consistency of muscle activation patterns across subjects. Spine 1996, 21, 2651–2661. [Google Scholar] [CrossRef]
- Wikstrom, B.O. Effects from twisted postures and whole-body vibration during driving. Int. J. Ind. Ergon. 1993, 12, 61–75. [Google Scholar] [CrossRef]
- Johanning, E. Back disorders and health problems among subway train operators exposed to whole-body vibration. Scand. J. Work Environ. Health 1991, 17, 414–419. [Google Scholar] [CrossRef]
- Magnusson, M.L.; Pope, M.H. A review of the biomechanics and epidemiology of working postures (it isn’t always vibration which is to blame!). J. Sound Vib. 1998, 215, 965–976. [Google Scholar] [CrossRef]
- Eger, T.; Stevenson, J.; Boileau, P.E.; Salmoni, A. Predictions of health risks associated with the operation of load-haul-dump mining vehicles: Part 1—Analysis of whole-body vibration exposure using ISO 2631–1 and ISO-2631–5 standards. Int. J. Ind. Ergon. 2008, 38, 726–738. [Google Scholar] [CrossRef]
- Eger, T.; Stevenson, J.; Callaghan, J.P.; Grenier, S. Predictions of health risks associated with the operation of load-haul-dump mining vehicles: Part 2—Evaluation of operator driving postures and associated postural loading. Int. J. Ind. Ergon. 2008, 38, 801–815. [Google Scholar] [CrossRef]
- ISO 11226–2000: Ergonomics—Evaluation of Static Working Postures; International Standards Organization: Geneva, Switzerland, 2000.
- Eger, T.R.; Godwin, A.A.; Henry, D.J.; Grenier, S.G.; Callaghan, J.; Demerchant, A. Why vehicle design matters: Exploring the link between line-of-sight, driving posture and risk factors for injury. Work 2010, 35, 27–37. [Google Scholar]
- Wuolijoki, E. Effects of simulated tractor vibration on the psychophysiological and mechanical functions of the driver: Comparison of some excitatory frequencies. Acta Forestalia Fennica 1981, 168, 1–53. [Google Scholar]
- Rahmatalla, S.; Deshaw, J. Predictive discomfort of non-neutral head-neck postures in fore-aft whole-body vibration. Ergonomics 2011, 54, 263–272. [Google Scholar] [CrossRef]
- Hostens, I.; Amditis, A.; Stefani, O.; Dangelmaier, M.; Bekiaris, E.; Schaerli, H.; Bullinger, A.; Ramon, H. SAFEGUARD seat/compartment evaluation methodology for vehicles with suspended seats. Meas. Sci. Technol. 2004, 15, 1742–1755. [Google Scholar] [CrossRef]
- Rahmatalla, S.; Xia, T.; Contratto, M.; Kopp, G.; Wilder, D.; Frey-Law, L.; Ankrum, J. Three-dimensional motion capture protocol for seated operator in whole body vibration. Int. J. Ind. Ergon. 2008, 38, 425–433. [Google Scholar] [CrossRef]
- Schust, M.; Kreisel, A.; Seidel, H.; Bluthner, R. Examination of the frequency-weighting curve for accelerations measured on the seat and at the surface supporting the feet during horizontal whole-body vibrations in x- and y-directions. Ind. Health 2010, 48, 725–742. [Google Scholar] [CrossRef]
- Dickey, J.P.; Eger, T.R.; Oliver, M.L.; Boileau, P.E.; Trick, L.M.; Edwards, A.M. Multi-axis sinusoidal whole-body vibrations: Part II—Relationship between Vibration Total Value and discomfort varies between vibration axes. J. Low Freq. Noise Vib. Act. Control 2007, 26, 195–204. [Google Scholar]
- Mansfield, N.J.; Maeda, S. Subjective ratings of whole-body vibration for single- and multi-axis motion. J. Acoust. Soc. Am. 2011, 130, 3723–3728. [Google Scholar] [CrossRef] [Green Version]
- Qiu, Y.; Griffin, M.J. Biodynamic responses of the seated human body to single-axis and dual-axis vibration. Ind. Health 2010, 48, 615–627. [Google Scholar] [CrossRef]
- Lemerle, P.; Höppner, O.; Rebelle, J. Dynamic stability of forklift trucks in cornering situations: Parametrical analysis using a driving simulator. Veh. Syst. Dyn. 2011, 49, 1673–1693. [Google Scholar] [CrossRef]
- Forde, K.A.; Albert, W.J.; Harrison, M.F.; Neary, J.P.; Croll, J.; Callaghan, J.P. Neck loads and posture exposure of helicopter pilots during simulated day and night flights. Int. J. Ind. Ergon. 2011, 41, 128–135. [Google Scholar] [CrossRef]
- Kizil, M. Virtual reality applications in the Australian minerals industry. Appl. Comp. Oper. Res. Miner. Ind. 2003, 569–574. [Google Scholar]
- Filigenzi, M.T.; Orr, T.J.; Ruff, T.M. Virtual reality for mine safety training. Appl. Occup. Environ. Hyg. 2000, 15, 465–469. [Google Scholar] [CrossRef]
- Yuen, K.K.; Choi, S.H.; Yang, X.B. A full-immersive CAVE-based VR simulation system of forklift truck operations for safety training. Comput. Aided Des. Appl. 2010, 7, 235–245. [Google Scholar]
- Tichon, J.; Watson, G.; Wallis, G. Using feature extraction and electromyography to evaluate affect during simulation. Int. J. Hum. Fact. Model. Simul. 2011, 2, 149–162. [Google Scholar] [CrossRef]
- Tichon, J.G. Using presence to improve a virtual training environment. Cyberpsychol. Behav. 2007, 10, 781–787. [Google Scholar] [CrossRef]
- Burgess-Limerick, R.; Zupanc, C.; Wallis, G. Effect of control order on steering a simulated underground coal shuttle car. Appl. Ergon. 2013, 44, 225–229. [Google Scholar] [CrossRef]
- Psotka, J. Immersive training systems: Virtual reality and education and training. Instr. Sci. 1995, 23, 405–431. [Google Scholar] [CrossRef]
- Merzouki, R.; Samantaray, A.K.; Pathak, P.M.; Bouamama, B.O. Road vehicle driving simulator. In Intelligent Mechatronic Systems; Springer: London, UK, 2013; pp. 909–933. [Google Scholar]
- Cabello, E.; Conde, C.; de Diego, I.M.; Moguerza, J.M.; Redchuk, A. Combination and selection of traffic safety expert judgments for the prevention of driving risks. Sensors 2012, 12, 14711–14729. [Google Scholar] [CrossRef]
- Eger, T.; Godwin, A.; Grenier, S. Using visibility tools in Classic JACK to assess line-of-sight issues associated with the operation of mobile equipment. Int. J. Hum. Fact. Model. Simul. 2010, 1, 406–419. [Google Scholar] [CrossRef]
- Choi, C.B.; Park, P.; Kim, Y.H.; Susan Hallbeck, M.; Jung, M.C. Comparison of visibility measurement techniques for forklift truck design factors. Appl. Ergon. 2009, 40, 280–285. [Google Scholar] [CrossRef]
- Chang, J.H.; Fathallah, F.A.; Pickett, W.; Miller, B.J.; Marlenga, B. Limitations in fields of vision for simulated young farm tractor operators. Ergonomics 2010, 53, 758–766. [Google Scholar]
- Wang, Y.B.; Zhang, W.; Salvendy, G. A comparative study of two hazard handling training methods for novice drivers. Traffic Inj. Prev. 2010, 11, 483–491. [Google Scholar] [CrossRef]
- Dickey, J.P.; Eger, T.R.; Oliver, M.L. A systematic approach for studying occupational whole-body vibration: A combined field and laboratory based approach. Work 2010, 35, 15–26. [Google Scholar]
- Godwin, A.A.; Eger, T.R.; Corrigan, L.; Grenier, S.G. Classic JACK modelling of driver posture and line-of-sight for operators of lift-trucks. Int. J. Hum. Fact. Model. Simul. 2010, 1, 259–270. [Google Scholar] [CrossRef]
- ISO 10326–1: Mechanical Vibration—Laboratory Method for Evaluating Vehicle Seat Vibration—Part 1: Basic Requirements; International Standards Organization: Geneva, Switzerland, 1992.
- Dickey, J.P.; Oliver, M.L.; Boileau, P.E.; Eger, T.R.; Trick, L.M. Multi-axis sinusoidal whole-body vibrations: Part I—Reliable laboratory vibration tests for measuring discomfort: How long should the vibration and rest exposures be for reliable discomfort measures? J. Low Freq. Noise Vib. Act. Control 2006, 25, 175–184. [Google Scholar] [CrossRef]
- Tegner, Y.; Leven, P.; Lysholm, J. Modell för bedömning av skador på halsrygg och axelled i enlighet med arbetsskadeförsäkringen. [in Swedish]. Läkartidningen 1983, 80, 3186–3189. [Google Scholar]
- Punnett, L.; Fine, L.J.; Keyserling, W.M.; Herrin, G.D.; Chaffin, D.B. Back disorders and nonneutral trunk postures of automobile assembly workers. Scand. J. Work Environ. Health 1991, 17, 337–346. [Google Scholar] [CrossRef]
- Rehn, B.; Nilsson, T.; Olofsson, B.; Lundstrom, R. Whole-body vibration exposure and non-neutral neck postures during occupational use of all-terrain vehicles. Ann. Occup. Hyg. 2005, 49, 267–275. [Google Scholar] [CrossRef]
- Hermanns, I.; Raffler, N.; Ellegast, R.P.; Fischer, S.; Gores, B. Simultaneous field measuring method of vibration and body posture for assessment of seated occupational driving tasks. Int. J. Ind. Ergon. 2008, 38, 255–263. [Google Scholar] [CrossRef]
- Raffler, N.; Hermanns, I.; Sayn, D.; Gores, B.; Ellegast, R.; Rissler, J. Assessing combined exposures of whole-body vibration and awkward posture—Further results from application of a simultaneous field measurement methodology. Ind. Health 2010, 48, 638–644. [Google Scholar] [CrossRef]
- Zhang, T.; Kaber, D.; Hsiang, S. Characterisation of mental models in a virtual reality-based multitasking scenario using measures of situation awareness. Theor. Issues Ergon. Sci. 2010, 11, 99–118. [Google Scholar] [CrossRef]
- Tenney, Y.J.; Pew, R.W. Situation awareness catches on: What? So what? Now what? Rev. Hum. Fact. Ergon. 2006, 2, 1–34. [Google Scholar] [CrossRef]
- Eger, T.; Salmoni, A.; Whissell, R. Factors influencing load-haul-dump operator line of sight in underground mining. Appl. Ergon. 2004, 35, 93–103. [Google Scholar] [CrossRef]
- Salmoni, A.; Cann, A.; Gillin, K. Exposure to whole-body vibration and seat transmissibility in a large sample of earth scrapers. Work 2010, 35, 63–75. [Google Scholar]
- De Diego, I.M.; Siordia, O.S.; Crespo, R.; Conde, C.; Cabello, E. Analysis of hands activity for automatic driving risk detection. Transp. Res. Part C Emerg. Technol. 2013, 26, 380–395. [Google Scholar] [CrossRef]
- De Oliveira, C.G.; Nadal, J. Back muscle EMG of helicopter pilots in flight: Effects of fatigue, vibration, and posture. Aviat. Space Environ. Med. 2004, 75, 317–322. [Google Scholar]
- Schust, M.; Bluthner, R.; Seidel, H. Examination of perceptions (intensity, seat comfort, effort) and reaction times (brake and accelerator) during low-frequency vibration in x- or y-direction and biaxial (xy-) vibration of driver seats with activated and deactivated suspension. J. Sound Vib. 2006, 298, 606–626. [Google Scholar] [CrossRef]
- Newell, G.S.; Mansfield, N.J. Evaluation of reaction time performance and subjective workload during whole-body vibration exposure while seated in upright and twisted postures with and without armrests. Int. J. Ind. Ergon. 2008, 38, 499–508. [Google Scholar] [CrossRef]
- Sodhi, M.; Reimer, B.; Llamazares, I. Glance analysis of driver eye movements to evaluate distraction. Behav. Res. Methods Instrum. Comput. 2002, 34, 529–538. [Google Scholar] [CrossRef]
- Ljungberg, J.K.; Parmentier, F.B.R. Psychological effects of combined noise and whole-body vibration: A review and avenues for future research. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2010, 224, 1289–1302. [Google Scholar] [CrossRef]
- Ahmed, O.B.; Goupillon, J.F. Predicting the ride vibration of an agricultural tractor. J. Terramech. 1997, 34, 1–11. [Google Scholar]
- ISO 5008:2002(E): Agricultural Wheeled Tractors and Field Machinery—Measurement of Whole-Body Vibration of the Operator; International Standards Organization: Geneva, Switzerland, 2002.
- Scarlett, A.J.; Price, J.S.; Stayner, R.M. Whole-body vibration: Evaluation of emission and exposure levels arising from agricultural tractors. J. Terramech. 2007, 44, 65–73. [Google Scholar] [CrossRef]
- Kumar, A.; Mahajan, P.; Mohan, D.; Varghese, M. Tractor vibration severity and driver health: A study from rural India. J. Agric. Eng. Res. 2001, 80, 313–328. [Google Scholar] [CrossRef]
- Horberry, T. The health and safety benefits of new technologies in mining: A review and strategy for designing and deploying effective user-centred systems. Minerals 2012, 2, 417–425. [Google Scholar] [CrossRef]
- Vagenas, N.; Scoble, M.; Baiden, G. A review of the first 25 years of mobile machine automation in underground hard rock mines. CIM Bull. 1997, 90, 57–62. [Google Scholar]
- Horberry, T.; Lynas, D. Human interaction with automated mining equipment: The development of an emerging technologies database. Ergon. Aust. 2012, 8, 1–6. [Google Scholar]
- Lynas, D.; Horberry, T. Human factor issues with automated mining equipment. Ergon. Open J. 2011, 4, 74–80. [Google Scholar] [CrossRef]
- Godwin, A.; Eger, T. Using virtual computer analysis to evaluate the potential use of a camera intervention on industrial machines with line-of-sight impairments. Int. J. Ind. Ergon. 2009, 39, 146–151. [Google Scholar] [CrossRef]
- Babapour, M.; Osvalder, A.L.; Bligard, L.O. Adoption of ergonomic features in a new reach truck cabin design—A usability study. Work A J. Prev. Assess. Rehabil. 2012, 41, 1486–1492. [Google Scholar]
- Genuit, K.; Fiebig, A. Application of automotive driving simulators for sound and vibration research. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2010, 224, 1279–1288. [Google Scholar] [CrossRef]
- Sarter, N.B.; Woods, D.D.; Billings, C.E. Automation surprises. In Handbook of Human Factors & Ergonomics; Salvendy, G., Ed.; Wiley: New York, NY, USA, 1997; pp. 1926–1943. [Google Scholar]
- Knight, J.F.; Baber, C. Neck muscle activity and perceived pain and discomfort due to variations of head load and posture. Aviat. Space Environ. Med. 2004, 75, 123–131. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Dickey, J.P.; Eger, T.R.; Frayne, R.J.; Delgado, G.P.; Ji, X. Research Using Virtual Reality: Mobile Machinery Safety in the 21st Century. Minerals 2013, 3, 145-164. https://doi.org/10.3390/min3020145
Dickey JP, Eger TR, Frayne RJ, Delgado GP, Ji X. Research Using Virtual Reality: Mobile Machinery Safety in the 21st Century. Minerals. 2013; 3(2):145-164. https://doi.org/10.3390/min3020145
Chicago/Turabian StyleDickey, James P., Tammy R. Eger, Ryan J. Frayne, Giselle P. Delgado, and Xiaoxu Ji. 2013. "Research Using Virtual Reality: Mobile Machinery Safety in the 21st Century" Minerals 3, no. 2: 145-164. https://doi.org/10.3390/min3020145