
Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives

Abstract
:1. Introduction
- Standing wave motors
- Travelling wave motors
- Walking piezoelectric motors
- Inertia motors
2. History and Application Review
2.1. First Developments
2.2. Positioning Applications
2.3. Force Generation
3. Basic Functional Principles
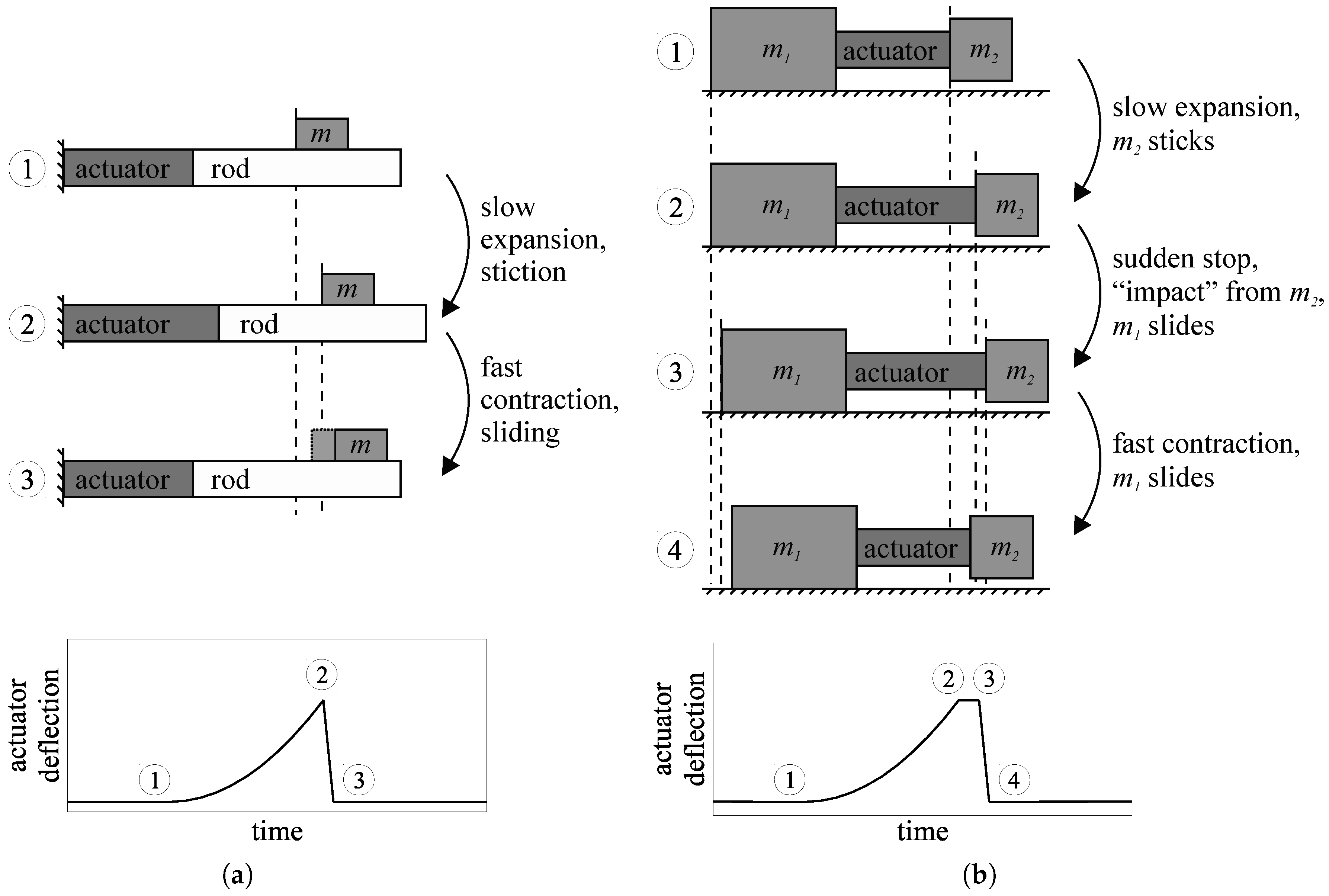
3.1. Fixed Actuator Type
3.2. Moving Actuator Type
3.3. Modes of Operation
4. Terminology and Proposed General Definition
In an inertia motor, an actuator of limited stroke, acting essentially parallel to the motor axis, drives an object through an uninterrupted contact. The object can travel a distance larger than the actuator stroke. The inertia of the object is essential for its movement.
5. Design Aspects
5.1. Friction Contact
5.1.1. Generation and Variation of Normal Force
5.1.2. Friction Couple
5.1.3. Friction Contact Simulation
5.2. Solid State Actuator
5.3. Electrical Excitation
5.3.1. Nonlinearities in Piezoelectric Actuators
5.3.2. Open-Loop Operation
5.3.3. Closed-Loop Operation
5.3.4. Voltage Signals for Low-Frequency Operation
5.3.5. Compensation of System Dynamics for Higher Velocity in Low-Frequency Operation
5.3.6. High-Frequency Operation
6. Conclusions and Outlook
Acknowledgments
Conflicts of Interest
Appendix A. Producers of Piezoelectric Inertia Motors
- Attocube Systems AG, Munich, Germany, www.attocube.com
- Cedrat Technologies, Meylan, France, www.cedrat-technologies.com
- Imina Technologies SA, Lausanne, Switzerland, www.imina.ch
- Kleindiek Nanotechnik GmbH, Reutlingen, Germany, www.nanotechnik.com
- Klocke Nanotechnik GmbH, Aachen, Germany, www.nanomotor.de
- mechOnics AG, Munich, Germany, www.mechonics.de
- Newport Corporation, Irvine, CA, USA, www.newport.com
- Physik Instrumente (PI) GmbH & Co. KG, Karlsruhe, Germany, www.physikinstrumente.de
- Piezoelectric Technology, Seoul, Korea, www.piezo-tech.com/eng
- Sensapex Oy, Oulu, Finland, www.sensapex.com
- SmarAct GmbH, Oldenburg, Germany, www.smaract.de
- Xidex Corporation, Austin, TX, USA, www.xidex.com
- OWIS GmbH, Staufen, Germany
- DCG Systems, Fremont, CA, USA (formerly Zyvex Instruments)
References
- Riedel, M. Piezokeramische Biegewandler. In Piezokeramik—Grundlagen, Werkstoffe, Applikationen; Expert-Verlag: Renningen-Malmsheim, Germany, 1995; pp. 153–171. (In German) [Google Scholar]
- Claeyssen, F.; Le Letty, R.; Barillot, F.; Sosnicki, O. Amplified Piezoelectric Actuators: Static & Dynamic Applications. Ferroelectrics 2007, 351, 3–14. [Google Scholar]
- Niezrecki, C.; Brei, D.; Balakrishnan, S.; Moskalik, A. Piezoelectric Actuation: State of the Art. Shock Vib. Dig. 2001, 33, 269–280. [Google Scholar] [CrossRef]
- Arnold, S.; Pertsch, P.; Spanner, K. Piezoelectric Positioning. In Piezoelectricity: Evolution and Future of a Technology; Heywang, W., Lubitz, K., Wersing, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 279–297. [Google Scholar]
- Morita, T. Miniature Piezoelectric Motors. Sens. Actuators A Phys. 2003, 103, 291–300. [Google Scholar] [CrossRef]
- Liu, D.K.C.; Friend, J.; Yeo, L. A Brief Reviewof Actuation at Themicro-Scale Using Electrostatics, Electromagnetics and Piezoelectric Ultrasonics. Acoust. Sci. Technol. 2010, 31, 115–123. [Google Scholar] [CrossRef]
- Williams, A.L.W.; Brown, W.J. Piezoelectric Motor. US Patent 2,439,499, 13 April 1948. [Google Scholar]
- Sashida, T.; Kenjo, T. An Introduction to Ultrasonic Motors; Oxford University Press: Oxford, UK, 1993. [Google Scholar]
- Ueha, S.; Tomikawa, Y. Ultrasonic Motors—Theory and Applications; Oxford University Press: Oxford, UK, 1993. [Google Scholar]
- Uchino, K. Piezoelectric Actuators and Ultrasonic Motors; Kluwer: Boston, MA, USA, 1997. [Google Scholar]
- Hemsel, T. Untersuchung und Weiterentwicklung linearer piezoelektrischer Schwingungsantriebe; HNI-Verlagsschriftenreihe. Ph.D. Thesis, Universität Paderborn, Paderborn, Germany, 2001. [Google Scholar]
- Spanner, K. Survey of the Various Operating Principles of Ultrasonic Piezomotors. In ACTUATOR 2006 Conference Proceedings; Hanseatische Veranstaltungs-GmbH: Bremen, Germany, 2006; pp. 414–421. [Google Scholar]
- Twiefel, J. Experimentelle und modellbasierte Untersuchung von Stehwellenantrieben. Ph.D. Thesis, Leibniz Universität Hannover, Hannover, Germany, 2010. [Google Scholar]
- Spanner, K.; Koc, B. An Overview of Piezoelectric Motors. In ACTUATOR 10 Conference Proceedings; Wirtschaftsförderung Bremen: Bremen, Germany, 2010; pp. 167–176. [Google Scholar]
- Zhao, C. Ultrasonic Motors—Technologies and Applications; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Tuncdemir, S.; Bai, Y.; Uchino, K. Single Source Hybrid Drive for Multi-Functional Ultrasonic Motor. Integr. Ferroelectr. 2014, 158, 131–145. [Google Scholar] [CrossRef]
- Peng, Y.; Peng, Y.; Gu, X.; Wang, J.; Yu, H. A Review of Long Range Piezoelectric Motors using Frequency Leveraged Method. Sens. Actuators A Phys. 2015, 235, 240–255. [Google Scholar] [CrossRef]
- Spanner, K.; Koc, B. Piezoelectric Motors, an Overview. Actuators 2016, 5, 6. [Google Scholar] [CrossRef]
- Ko, H.P.; Kim, S.; Borodinas, S.N.; Vasiljev, P.E.; Kang, C.Y.; Yoon, S.J. A Novel Tiny Ultrasonic Linear Motor Using the Radial Mode of a Bimorph. Sens. Actuators A Phys. 2006, 125, 477–481. [Google Scholar] [CrossRef]
- Matsusaka, K.; Ozawa, S.; Yoshida, R.; Yuasa, T.; Souma, Y. Ultracompact Optical Zoom Lens for Mobile Phone. Proc. SPIE 2007, 6502. [Google Scholar] [CrossRef]
- Sasaki, R. Actuator. US Patent 7,449,815 B2, 11 November 2008. [Google Scholar]
- Uchino, K. Piezoelectric Motors for Camera Modules. In ACTUATOR 08 Conference Proceedings; Hanseatische Veranstaltungs-GmbH: Bremen, Germany, 2008; pp. 157–160. [Google Scholar]
- Paik, D.S.; Yoo, K.H.; Kang, C.Y.; Cho, B.H.; Nam, S.; Yoon, S.J. Multilayer Piezoelectric Linear Ultrasonic Motor for Camera Module. J. Electroceram. 2009, 22, 346–351. [Google Scholar] [CrossRef]
- Henderson, D.A. Linear Drive Systems and Methods Thereof. US Patent Application 8,059,346 A1, 15 November 2011. [Google Scholar]
- Lee, J.; Kwon, W.S.; Kim, K.S.; Kim, S. A Novel Smooth Impact Drive Mechanism Actuation Method with Dual-Slider for a Compact Zoom Lens System. Rev. Sci. Instrum. 2011, 82, 085105. [Google Scholar] [CrossRef] [PubMed]
- Okamoto, Y.; Yoshida, R. Development of Linear Actuators Using Piezoelectric Elements. Electron. Commun. Jpn. Part III 1998, 81, 11–17. [Google Scholar] [CrossRef]
- Ko, H.P.; Lee, K.J.; Yoo, K.H.; Kang, C.Y.; Kim, S.; Yoon, S.J. Analysis of Tiny Piezoelectric Ultrasonic Linear Motor. Jpn. J. Appl. Phys. 2006, 45, 4782–4786. [Google Scholar] [CrossRef]
- Kawakita, S.; Isogai, T.; Ohya, N.; Kawahara, N. Multi-layered Piezoelectric Bimorph Actuator. In Proceedings of the 1997 International Symposium on Micromechatronics and Human Science, Nagoya, Japan, 5–8 October 1997; pp. 73–78.
- Liu, P.; Wen, Z.; Sun, L. An In-Pipe Micro Robot Actuated by Piezoelectric Bimorphs. Chin. Sci. Bull. 2009, 54, 2134–2142. [Google Scholar] [CrossRef]
- Howald, L.; Rudin, H.; Guntherodt, H.J. Piezoelectric Inertial Stepping Motor with Spherical Rotor. Rev. Sci. Instrum. 1992, 63, 3909–3912. [Google Scholar] [CrossRef]
- Bansevicius, R.; Blechertas, V. Ultrasonic Motors for Mass-Consumer Products. Ultragarsas 2006, 61, 50–52. [Google Scholar]
- Zhang, Z.M.; An, Q.; Li, J.W.; Zhang, W.J. Piezoelectric Friction–Inertia Actuator—A Critical Review and Future Perspective. Int. J. Adv. Manuf. Technol. 2012, 62, 669–685. [Google Scholar] [CrossRef]
- Pohl, D.W. Sawtooth Nanometer Slider: A Versatile Low Voltage Piezoelectric Translation Device. Surf. Sci. 1987, 181, 174–175. [Google Scholar] [CrossRef]
- Pohl, D.W. Dynamic Piezoelectric Translation Devices. Rev. Sci. Instrum. 1987, 58, 54–57. [Google Scholar] [CrossRef]
- Higuchi, T.; Hojjat, Y.; Wanatabe, M. Micro Actuators Using Recoil of an Ejected Mass. In Proceedings of the Micro Robots and Teleoperators Workshop, Hyannis, MA, USA, 9–11 November 1987.
- Anders, M.; Thaer, M.; Heiden, C. Simple Micropositioning Devices for STM. Surf. Sci. 1987, 181, 176–182. [Google Scholar] [CrossRef]
- Higuchi, T. Application of Electromagnetic Impulsive Force to Precise Positioning Tools in Robot System. In Proceedings of the 2nd International Symposium on Robotics Research, Kyoto, Japan, 25 May 1984; pp. 281–285.
- Söderqvist, A.L.O. Method and Device for Displacement of a Workpiece. US Patent 3,957,162, 18 May 1976. [Google Scholar]
- Huang, W. Impulsive Manipulation. Ph.D. Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 1997. [Google Scholar]
- Lyding, J.W.; Skala, S.; Hubacek, J.S.; Brockenbrough, R.; Gammie, G. Variable-Temperature Scanning Tunneling Microscope. Rev. Sci. Instrum. 1988, 59, 1897–1902. [Google Scholar] [CrossRef]
- Niedermann, P.; Emch, R.; Descouts, P. Simple Piezoelectric Translation Device. Rev. Sci. Instrum. 1988, 59, 368–369. [Google Scholar] [CrossRef]
- Blackford, B.L.; Jericho, M.H. Simple Two-Dimensional Piezoelectric Micropositioner for a Scanning Tunneling Microscope. Rev. Sci. Instrum. 1990, 61, 182–184. [Google Scholar] [CrossRef]
- Judy, J.W.; Polla, D.L.; Robbins, W.P. A Linear Piezoelectric Stepper Motor with Submicrometer Step Size and Centimeter Travel Range. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1990, 37, 428–437. [Google Scholar] [CrossRef] [PubMed]
- Renner, C.; Niedermann, P.; Kent, A.D.; Fischer, O. A Vertical Piezoelectric Inertial Slider. Rev. Sci. Instrum. 1990, 61, 965–967. [Google Scholar] [CrossRef]
- Matsuda, R.; Kaneko, R. Micro-Step XY-Stage Using Piezoelectric Tube Actuator. In Proceedings of the Micro Electro Mechanical Systems 1991, Nara, Japan, 30 January–2 February 1991; pp. 137–142.
- Park, C.; Park, K.S.; Huh, Y.S.; Jeon, I.C.; Kim, S. Scanning Tunneling Microscope with Novel Coarse Sample Positioning Technique. J. Vac. Sci. Technol. B 1991, 9, 636–638. [Google Scholar] [CrossRef]
- Probst, O.; Grafstrom, S.; Kowalski, J.; Neumann, R.; Wortge, M. A Tunneling Atomic Force Microscope with Inertial Tip-to-Sensor Approach. J. Vac. Sci. Technol. B 1991, 9, 626–630. [Google Scholar] [CrossRef]
- Agraït, N. Vertical Inertial Piezoelectric Translation Device for a Scanning Tunneling Microscope. Rev. Sci. Instrum. 1992, 63, 263–264. [Google Scholar] [CrossRef]
- Blackford, B.L.; Jericho, M.H.; Boudreau, M.G. A Vertical/Horizontal Two-Dimensional Piezoelectric Driven Inertial Slider Micropositioner for Cryogenic Applications. Rev. Sci. Instrum. 1992, 63, 2206–2209. [Google Scholar] [CrossRef]
- Libioulle, L.; Ronda, A.; Derycke, I.; Vigneron, J.P.; Gilles, J.M. Vertical Two-Dimensional Piezoelectric Inertial Slider for Scanning Tunneling Microscope. Rev. Sci. Instrum. 1993, 64, 1489–1494. [Google Scholar] [CrossRef]
- Smith, A.R.; Gwo, S.; Shih, C.K. A New High-Resolution Two-Dimensional Micropositioning Device for Scanning Probe Microscopy Applications. Rev. Sci. Instrum. 1994, 65, 3216–3219. [Google Scholar] [CrossRef]
- Wildöer, J.W.G.; van Roy, A.J.A.; van Kempen, H.; Harmans, C.J.P.M. Low-Temperature Scanning Tunneling Microscope for Use on Artificially Fabricated Nanostructures. Rev. Sci. Instrum. 1994, 65, 2849–2852. [Google Scholar] [CrossRef]
- Drevniok, B.; Paul, W.M.P.; Hairsine, K.R.; McLean, A.B. Methods and Instrumentation for Piezoelectric Motors. Rev. Sci. Instrum. 2012, 83, 033706. [Google Scholar] [CrossRef] [PubMed]
- Kudoh, K.; Tabuchi, S.; Higuchi, T.; Kakusho, N.; Sato, K. Development of Automatic Micromanipulation System for Biological Cell Sorter. J. Mamm. Ova Res. 1998, 15, 167–172. [Google Scholar] [CrossRef]
- Bergander, A.; Breguet, J.M.; Clavel, R. Micropositioners for Microscopy Applications and Microbiology Based on Piezoelectric Actuators. J. Micromechatron. 2002, 2, 65–76. [Google Scholar] [CrossRef]
- Sievers, T.; Garnica, S.; Tautz, S.; Trüper, T.; Fatikow, S. Microrobot Station for Automatic Cell Handling. In Proceeding of the ICGST International Conference on Automation, Robotics and Autonomous Systems, Cairo, Egypt, 19–21 December 2005.
- Wörn, H.; Schmoeckel, F.; Buerkle, A.; Samitier, J.; Puig-Vidal, M.; Johansson, S.; Simu, U.; Meyer, J.U.; Biehl, M. From Decimeter- to Centimeter-Sized Mobile Microrobots—The Development of the MINIMAN System. Proc. SPIE 2001, 4568, 175–186. [Google Scholar]
- Eglin, M.; Eriksson, M.A.; Carpick, R.W. Microparticle Manipulation Using Inertial Forces. Appl. Phys. Lett. 2006, 88, 091913. [Google Scholar] [CrossRef]
- Reynolds, K.; Komulainen, J.; Kivijakola, J.; Lovera, P.; Iacopino, D.; Pudas, M.; Vähäkangas, J.; Röning, J.; Redmond, G. Probe Based Manipulation and Assembly of Nanowires into Organized Mesostructures. Nanotechnology 2008, 19, 485301. [Google Scholar] [CrossRef]
- Fatikow, S.; Wich, T.; Sievers, T.; Jähnisch, M.; Eichhorn, V.; Mircea, J.; Hülsen, H.; Stolle, C. Automatic Nanohandling Station Inside a Scanning Electron Microscope. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2008, 222, 117–128. [Google Scholar] [CrossRef]
- Rakotondrabe, M.; Haddab, Y.; Lutz, P. Development, Modeling, and Control of a Micro-/Nanopositioning 2-DOF Stick–Slip Device. IEEE/ASME Trans. Mechatron. 2009, 14, 733–745. [Google Scholar] [CrossRef] [Green Version]
- Higuchi, T.; Yamagata, Y.; Kudoh, K.I.; Iwasaki, K. Micro Tobot Arm Utilizing Rapid Deformations of Piezoelectric Elements. In Fifth International Symposium on Robotics Research; MIT Press: Cambridge, MA, USA, 1990; pp. 37–44. [Google Scholar]
- Saito, S.; Nagano, M. Driving Device. US Patent 5,225,941, 6 July 1993. [Google Scholar]
- Büchi, R. Modellierung und Regelung von Impact Drives für Positionierungen im Nanometerbereich. Ph.D. Thesis, ETH Zürich, Zürich, Switzerland, 1996. [Google Scholar]
- Zesch, W. Multi-Degree-of-Freedom Micropositioning Using Stepping Principles. Ph.D. Thesis, ETH Zürich, Zürich, Switzerland, 1997. [Google Scholar]
- Breguet, J. Actionneurs “Stick and Slip” Pour Micro-Manipulateurs. Ph.D. Thesis, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 1998. [Google Scholar]
- Bergander, A.; Driesen, W.; Varidel, T.; Gilles, J.M. Development of Miniature Manipulators for Applications in Biology and Nanotechnologies. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Workshop “Microrobotics for Biomanipulation”, Las Vegas, NV, USA, 27–31 October 2003; pp. 11–35.
- Bansevicius, R.; Blechertas, V. Multi-Degree-of-Freedom Ultrasonic Motors for Mass-Consumer Devices. J. Electroceram. 2008, 20, 221–224. [Google Scholar] [CrossRef]
- Hernández, H.; Preza, E.; Velázquez, R. Characterization of a Piezoelectric Ultrasonic Linear Motor for Braille Displays. In Proceedings of the 2009 Electronics, Robotics and Automotive Mechanics Conference, Cuernavaca, Mexico, 22–25 September 2009; pp. 402–407.
- Furutani, K.; Mohri, N.; Higuchi, T. Self-Running Type Electrical Discharge Machine Using Impact Drive Mechanism. In Proceedings of the IEEE/ASME 1st International Conference Advanced Intelligent Mechatronics, Tokyo, Japan, 20 June 1997.
- Sony Corporation. SteadyShot INSIDE (Archived Copy). 2012. Available online: http://web.archive.org/web/20120510001633/http://www.sony.net/SonyInfo/technology/technology/theme/alpha_01.html (accessed on 10 May 2012).
- Konica Minolta Holdings, Inc. Piezoelectric Supersonic Linear Actuator (Archived Copy). 2012. Available online: http://web.archive.org/web/20140530021946/http://www.konicaminolta.com/about/research/core_technology/picture/antiblur.html (accessed on 30 May 2014).
- Rabe, R. Compact Test Platform for In-Situ Indentation and Scratching inside a Scanning Electron Microscope (SEM). Ph.D. Thesis, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 2006. [Google Scholar]
- Cheng, C.; Hung, S. The Design and Characteristic Research of a Dual-Mode Inertia Motor. In Proceedings of the 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary, 3–7 July 2011; pp. 605–610.
- Belly, C.; Porchez, T.; Bagot, M.; Claeyssen, F. Improvement of Linear and Rotative Stepping Piezo Actuators Using Design and Control. In ACTUATOR 12 Conference Proceedings; Wirtschaftsförderung Bremen: Bremen, Germany, 2012; pp. 246–249. [Google Scholar]
- Idogaki, T.; Kanayama, H.; Nobofuku, O.; Harumi, S.; Tadashi, H. Characteristics of Piezoelectric Locomotive Mechanism for an In-Pipe Micro Inspection Machine. In Proceedings of the Sixth International Symposium on Micro-Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 193–198.
- Hunstig, M.; Hemsel, T.; Sextro, W. High-Velocity Operation of Piezoelectric Inertia Motors: Experimental Validation. Arch. Appl. Mech. 2014, 86, 1733–1741. [Google Scholar] [CrossRef]
- Kang, C.Y.; Yoo, K.H.; Ko, H.P.; Kim, H.J.; Ko, T.K.; Yoon, S.J. Analysis of Driving Mechanism for Tiny Piezoelectric Linear Motor. J. Electroceram. 2006, 17, 609–612. [Google Scholar] [CrossRef]
- Edeler, C.; Fatikow, S. Open Loop Force Control of Piezo-Actuated Stick-Slip Drives. Int. J. Intell. Mechatron. Robot. 2011, 1, 1–19. [Google Scholar] [CrossRef]
- Suzuki, M.; Hosaka, H.; Morita, T. Resonant-Type Smooth Impact Drive Mechanism Actuator with Two Langevin Transducers. Adv. Robot. 2012, 26, 277–290. [Google Scholar] [CrossRef]
- Zhang, Q.S.; Chen, X.B.; Yang, Q.; Zhang, W.J. Development and Characterization of a Novel Piezoelectric-Driven Stick-Slip Actuator with Anisotropic-Friction Surfaces. Int. J. Adv. Manuf. Technol. 2012, 61, 1029–1034. [Google Scholar] [CrossRef]
- Yokose, T.; Hosaka, H.; Morita, T. Improvement of Miniaturized Resonant Type SIDM Actuator. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 1810–1813.
- Pak, M.; Nasseri, A. Load-Velocity Characteristics of a Stick-Slip Piezo Actuator. In ACTUATOR 12 Conference Proceedings; Wirtschaftsförderung Bremen: Bremen, Germany, 2012; pp. 755–756. [Google Scholar]
- Claeyssen, F.; Ducamp, A.; Barillot, F.; Le Letty, R.; Porchez, T.; Sosnicky, O.; Belly, C. Stepping Piezoelectric Actuators Based on APAs. In ACTUATOR 08 Conference Proceedings; Hanseatische Veranstaltungs-GmbH: Bremen, Germany, 2008; pp. 623–626. [Google Scholar]
- Yokozawa, H.; Morita, T. Wireguide Driving Actuator Using Resonant-Type Smooth Impact Drive Mechanism. Sens. Actuators A Phys. 2015, 230, 40–44. [Google Scholar] [CrossRef]
- Nishimura, T.; Hosaka, H.; Morita, T. Resonant-type Smooth Impact Drive Mechanism (SIDM) Actuator Using a Bolt-Clamped Langevin Transducer. Ultrasonics 2012, 52, 75–80. [Google Scholar] [CrossRef] [PubMed]
- Hunstig, M. Konzeption, Ansteuerung und Eigenschaften schneller Piezoelektrischer Trägheitsmotoren (Conception, Control and Characteristics of Fast Piezoelectric Inertia Motors). Ph.D. Thesis, Universität Paderborn, Paderborn, Germany, 2014. [Google Scholar]
- Edeler, C. Measurements and Potential Applications of Force-Control Method for Stick-Slip-Driven Nanohandling Robots. Key Eng. Mater. 2011, 467–469, 1556–1561. [Google Scholar] [CrossRef]
- Edeler, C. Modellierung und Validierung der Krafterzeugung mit Stick-Slip-Antrieben für nanorobotische Anwendungen. Ph.D. Thesis, Carl von Ossietzky Universität Oldenburg, Oldenburg, Germany, 2011. [Google Scholar]
- Breguet, J.M.; Driesen, W.; Kaegi, F.; Cimprich, T. Applications of Piezo-Actuated Micro-Robots in Micro-Biology and Material Science. In Procceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 57–62.
- Hunstig, M.; Hemsel, T.; Sextro, W. Stick-Slip and Slip-Slip Operation of Piezoelectric Inertia Drives. Part I: Ideal Excitation. Sens. Actuators A Phys. 2013, 200, 90–100. [Google Scholar] [CrossRef]
- Hunstig, M.; Hemsel, T.; Sextro, W. Stick-Slip and Slip-Slip Operation of Piezoelectric Inertia Drives. Part II: Frequency-Limited Excitation. Sens. Actuators A Phys. 2013, 200, 79–89. [Google Scholar] [CrossRef]
- Neuman, J.; Novác̆ek, Z.; Pavera, M.; Zlámal, J.; Kalousek, R.; Spousta, J.; Dittrichová, L.; Šikola, T. Experimental Optimization of Power-Function-Shaped Drive Pulse for Stick-Slip Piezo Actuators. Precis. Eng. 2015, 42, 187–194. [Google Scholar] [CrossRef]
- Morita, T.; Murakami, H.; Yokose, T.; Hosaka, H. A Miniaturized Resonant-Type Smooth Impact Drive Mechanism Actuator. Sens. Actuators A Phys. 2012, 178, 188–192. [Google Scholar] [CrossRef]
- Nishimura, T.; Morita, T. Resonant-Type SIDM Actuator. In ACTUATOR 10 Conference Proceedings; Wirtschaftsförderung Bremen: Bremen, Germany, 2010; pp. 181–185. [Google Scholar]
- Lambert, P.; Valentini, A.; Lagrange, B.; de Lit, P.; Delchambre, A. Design and Performances of a One-Degree-of-Freedom Guided Nano-Actuator. Robot. Comput. Integr. Manuf. 2003, 19, 89–98. [Google Scholar] [CrossRef]
- Chu, C.; Fan, S. A Novel Long-Travel Piezoelectric-Driven Linear Nanopositioning Stage. Precis. Eng. 2006, 30, 85–95. [Google Scholar] [CrossRef]
- Imina Technologies. Micromanipulator miBot BT-11. 2015. Available online: http://imina.ch/technology (accessed on 4 October 2015).
- SmarAct GmbH. Technology: Driving Principle. 2014. Available online: http://www.smaract.de/index.php/technology (accessed on 4 October 2015).
- Jordan, S.; Lula, B.; Vorndran, S. Nanopositioning: Keeping Pace. In The Photonics Handbook 2007; Laurin Publishing: Pittsfield, MA, USA, 2007. [Google Scholar]
- Minase, J.; Lu, T.F.; Cazzolato, B.; Grainger, S. A Review, Supported by Experimental Results, of Voltage, Charge and Capacitor Insertion Method for Driving Piezoelectric Actuators. Precis. Eng. 2010, 34, 692–700. [Google Scholar] [CrossRef]
- Ehrichs, E.E.; Smith, W.F.; de Lozanne, A.L. A Scanning Tunneling Microscope/Scanning Electron Microscope System for The Fabrication of Nanostructures. J. Vac. Sci. Technol. B Microelectron. Nanometer Struct. 1991, 9, 1380–1383. [Google Scholar] [CrossRef]
- Mugele, F.; Kloos, C.; Leiderer, P.; Moller, R. A Simple, Ultrahigh Vacuum Compatible Scanning Tunneling Microscope for Use at Variable Temperatures. Rev. Sci. Instrum. 1996, 67, 2557–2559. [Google Scholar] [CrossRef]
- Hack, T. Experiments with a New Piezoelectric Rotary Actuator. In Proceedings of the 1998 IEEE International Frequency Control Symposium, Pasadena, CA, USA, 29 May 1998; pp. 724–732.
- Wörn, H.; Munassypov, R.; Fatikow, S. Actuation Principle and Motion Control of a Three-Legged Piezoelectric Micromanipulation Robot. In ACTUATOR 98 Conference Proceedings; Messe Bremen: Bremen, Germany, 1998; pp. 203–206. [Google Scholar]
- Meyer, C.; Sqalli, O.; Lorenz, H.; Karrai, K. Slip-Stick Step-Scanner for Scanning Probe Microscopy. Rev. Sci. Instrum. 2005, 76, 063706. [Google Scholar] [CrossRef]
- Chen, X.; Kong, D.; Zhang, Q. On the Dynamics of Piezoelectric-Driven Stick-Slip Actuator. Key Eng. Mater. 2008, 375–376, 648–652. [Google Scholar] [CrossRef]
- Voigtländer, B.; Coenen, P.; Cherepanov, V. Apparatus and Method for Electromechanical Positioning. WO Patent Application 2010/105,592 A1, 23 September 2010. (In German)[Google Scholar]
- Lee, S.W.; Ahn, K.G.; Ni, J. Development of A Piezoelectric Multi-Axis Stage Based on Stick-and-Clamping Actuation Technology. Smart Mater. Struct. 2007, 16, 2354–2367. [Google Scholar] [CrossRef]
- Higuchi, T.; Yamagata, Y.; Furutani, K.; Kudoh, K. Precise Positioning Mechanism Utilizing Rapid Deformations of Piezoelectric Elements. In Proceedings of the Micro Electro Mechanical Systems 1990, Napa Valley, CA, USA, 11–14 February 1990; pp. 222–226.
- Bergander, A. Control, Wear Testing & Integration of Slick-Slip Micropositioning. Ph.D. Thesis, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 2003. [Google Scholar]
- Rass, C.; Kortschack, A. Inertia Drive Device. WO Patent Application 2008/052,785 A1, 28 February 2008. (In German)[Google Scholar]
- Furutani, K.; Higuchi, T.; Yamagata, Y.; Mohri, N. Effect of Lubrication on Impact Drive Mechanism. Precis. Eng. 1998, 22, 78–86. [Google Scholar] [CrossRef]
- Ha, J.L.; Fung, R.F.; Yang, C.S. Hysteresis Identification and Dynamic Responses of the Impact Drive Mechanism. J. Sound Vib. 2005, 283, 943–956. [Google Scholar] [CrossRef]
- Zhang, H.; Zeng, P.; Hua, S.; Cheng, G.; Yang, Z. Impact Drive Rotary Precision Actuator with Piezoelectric Bimorphs. Front. Mech. Eng. China 2008, 3, 71–75. [Google Scholar] [CrossRef]
- Yang, C.F.; Jeng, S.L.; Chieng, W.H. Motion Behavior of Triangular Waveform Excitation Input in an Operating Impact Drive Mechanism. Sens. Actuators A Phys. 2011, 166, 66–77. [Google Scholar] [CrossRef]
- Yoshida, R.; Yasuhiro, O.; Higuchi, T.; Hamamatsu, A. Development of Smooth Impact Drive Mechanism (SIDM): Proposal of Driving Mechanism and Basic Performance. J. Jpn. Soc. Precis. Eng. 1999, 65, 111–115. (In Japanese) [Google Scholar] [CrossRef]
- Morita, T.; Yoshida, R.; Okamoto, Y.; Kurosawa, M.; Higuchi, T. A Smooth Impact Rotation Motor Using A Multi-Layered Torsional Piezoelectric Actuator. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1999, 46, 1439–1445. [Google Scholar] [CrossRef] [PubMed]
- Yokozawa, H.; Muto, M.; Kishimoto, S.; Doshida, Y.; Morita, T. Resonant-Type Smooth Impact Drive Mechanism Using Lead-Free Piezoelectric Materials. In Proceedings of the 12th International Workshop on Piezoelectric Materials and Applications in Actuators (IWPMA-2015), Vilnius, Lithuania, 29 June–1 July 2015; p. 59.
- Cheng, T.; Lu, X.; Zhao, H.; Chen, D.; He, P.; Wang, L.; Zhao, X. Performance Improvement of Smooth Impact Drive Mechanism at Low Voltage Utilizing Ultrasonic Friction Reduction. Rev. Sci. Instrum. 2016, 87, 085007. [Google Scholar] [CrossRef] [PubMed]
- Driesen, W. Concept, Modeling and Experimental Characterization of the Modulated Friction Inertial Drive (MFID) Locomotion Principle: Application to Mobile Microrobots. Ph.D. Thesis, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 2008. [Google Scholar]
- Bordoni, F.; De Gasperis, G.; Di Battista, S.; Schirripa Spagnolo, G. A Scanning Tunnelling Microscope with a Piezoelectric-Driven Inertial Slider. Sens. Actuators A Phys. 1994, 45, 173–178. [Google Scholar] [CrossRef]
- Svensson, K.; Althoff, F.; Olin, H. A Compact Inertial Slider STM. Meas. Sci. Technol. 1997, 8, 1360–1362. [Google Scholar] [CrossRef]
- Van der Wulp, H. Piezo-Driven Stages for Nanopositioning with Extreme Stability: Theoretical Aspects and Practical Design Considerations. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1997. [Google Scholar]
- Hemsel, T.; Wallaschek, J. Survey of the Present State of the Art of Piezoelectric Linear Motors. Ultrasonics 2000, 38, 37–40. [Google Scholar] [CrossRef]
- Patil, S.; Matei, G.; Dong, H.; Hoffmann, P.M.; Karakose, M.; Oral, A. A Highly Sensitive Atomic Force Microscope for Linear Measurements of Molecular Forces in Liquids. Rev. Sci. Instrum. 2005, 76, 103705. [Google Scholar] [CrossRef] [Green Version]
- Chao, S.H.; Garbini, J.L.; Dougherty, W.M.; Sidles, J.A. The Design and Control of a Three-Dimensional Piezoceramic Tube Scanner with an Inertial Slider. Rev. Sci. Instrum. 2006, 77, 063710. [Google Scholar] [CrossRef]
- Lee, J.H.; Park, Y.H.; Kim, K.S.; Kim, S.H. Independent Driving Method of Two Moving Sliders Using One Piezoelectric Linear Actuator. In ACTUATOR 10 Conference Proceedings; Wirtschaftsförderung Bremen: Bremen, Germany, 2010; pp. 617–619. [Google Scholar]
- Maeno, T.; Tsukumoto, T.; Miyake, A. Finite-Element Analysis of the Rotor/Stator Contact in a Ring-Type Ultrasonic Motor. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1992, 39, 668–674. [Google Scholar] [CrossRef] [PubMed]
- Zhu, M. Contact Analysis and Mathematical Modeling of Traveling Wave Ultrasonic Motors. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 668–679. [Google Scholar] [PubMed]
- Millis, M.G.; Thomas, N.E. Responding to Mechanical Antigravity. NASA, Glenn Research Center, 2006. Available online: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20070004897.pdf (accessed on 4 October 2015). [Google Scholar]
- Davis, U., Jr. Vectored Inertia Drive/Wobble Drive. WO Patent Application 2001/53,721 A1, 26 July 2001. [Google Scholar]
- Lasch, T. Rotational Inertial Motor. EP Patent Application 1,707,809 A1, 4 October 2006. (In German)[Google Scholar]
- Adams, R.E., Jr. In Search of the Bootstrap Effect. In Analog Science Fiction/Science Fact; The Condé Nast Publications Inc.: New York, NY, USA, 1978. [Google Scholar]
- Parameswaran, M.A.; Ganapathy, S. Vibratory Conveying—Analysis and Design: A Review. Mech. Mach. Theory 1979, 14, 89–97. [Google Scholar] [CrossRef]
- Asumi, K.; Fukunaga, R.; Fujimura, T.; Kurosawa, M.K. High Speed, High Resolution Ultrasonic Linear Motor Using V-Shape two Bolt-Clamped Langevin-Type Transducers. Acoust. Sci. Technol. 2009, 30, 180–186. [Google Scholar] [CrossRef]
- Van de Vijver, W.; Houben, M.; van Brussel, H.; Reynaerts, D. Piezomotors: An Enabling Technology. Mikroniek 2009, 49, 20–27. [Google Scholar]
- Tuncdemir, S.; Ural, S.O.; Koc, B.; Uchino, K. Design of Translation Rotary Ultrasonic Motor with Slanted Piezoelectric Ceramics. Jpn. J. Appl. Phys. 2011, 50, 027301. [Google Scholar] [CrossRef]
- Bergander, A.; Breguet, J.M. A Testing Mechanism and Testing Procedure for Materials in Inertial Drives. In Proceedings of the 2002 International Symposium on Micromechatronics and Human Science, Nagoya, Japan, 20–23 October 2002; pp. 213–218.
- Matsuki, K. Inertial Drive Actuator. EP Patent Application 1,845,608 A2, 17 October 2007. [Google Scholar]
- Hunstig, M.; Hemsel, T.; Sextro, W. Modelling the Friction Contact in an Inertia Motor. J. Intell. Mater. Syst. Struct. 2013, 24, 1380–1391. [Google Scholar] [CrossRef]
- Yoshida, R.; Fujii, S.; Sueyoshi, H. Drive Apparatus Having Auxiliary Springs. US Patent 7,737,610 B2, 15 June 2010. [Google Scholar]
- Shilton, R.J.; Langelier, S.M.; Friend, J.R.; Yeo, L.Y. Surface Acoustic Wave Solid-State Rotational Micromotor. Appl. Phys. Lett. 2012, 100, 033503. [Google Scholar] [CrossRef]
- Burisch, A.; Soetebier, S.; Wrege, J.; Hesselbach, R. Piezoelectric Stick-Slip-Actuator with Normal-Force- Modulation. In ACTUATOR 2004 Conference Proceedings; Hanseatische Veranstaltungs-GmbH: Bremen, Germany, 2004; pp. 148–151. [Google Scholar]
- Ikuta, K.; Aritomi, S.; Kabashima, T. Tiny Silent Linear Cybernetic Actuator Driven by Piezoelectric Device with Electromagnetic Clamp. In Proceedings of the Micro Electro Mechanical Systems 1992, Travemünde, Germany, 4–7 February 1992; pp. 232–237.
- Peichel, D.; Marcus, D.; Rizq, R.; Erdman, A.; Robbins, W.; Polla, D. Silicon Fabricated Submicrometer Stepper Motor for Microsurgical Procedures. J. Microelectromech. Syst. 2002, 11, 154–160. [Google Scholar] [CrossRef]
- Higuchi, T.; Furutani, K.; Yamagata, Y.; Kudoh, K.; Ogawa, M. Improvement of Velocity of Impact Drive Mechanism by Controlling Friction. J. Adv. Autom. Technol. 1993, 5, 71–76. [Google Scholar] [CrossRef]
- Cheng, G.; Wen, J.; Yang, Z.; Zeng, P.; Sun, G. Inertial Piezoelectric Moving Mechanism based on Changing Normal Pressure. J. Jilin Univ. (Eng. Technol. Ed.) 2007, 37, 548–552. (In Chinese) [Google Scholar]
- Cheng, G.; Li, X.; Zeng, P.; Yang, Z. Inertial Impact Driving Movement Mechanism Actuated by Multilayer Piezoelectric Actuator. J. Jilin Univ. (Eng. Technol. Ed.) 2007, 37, 85–88. (In Chinese) [Google Scholar]
- Wen, J.; Ma, J.; Zeng, P.; Cheng, G.; Zhang, Z. A New Inertial Piezoelectric Rotary Actuator Based on Changing the Normal Pressure. Microsyst. Technol. 2013, 19, 277–283. [Google Scholar] [CrossRef]
- Li, J.; Zhou, X.; Zhao, H.; Shao, M.; Hou, P.; Xu, X. Design and Experimental Performances of a Piezoelectric Linear Actuator by Means of Lateral Motion. Smart Mater. Struct. 2015, 24, 065007. [Google Scholar] [CrossRef]
- Frei, P.U. Theory, Design and Implementation of a Novel Vibratory Conveyor. Ph.D. Thesis, ETH Zürich, Zürich, Switzerland, 2002. [Google Scholar]
- Göken, M. Scanning Tunneling Microscopy in UHV with an X,Y,Z Micropositioner. Rev. Sci. Instrum. 1994, 65, 2252–2254. [Google Scholar] [CrossRef]
- Darby, A.P.; Pellegrino, S. Inertial Stick-Slip Actuator for Active Control of Shape and Vibration. J. Intell. Mater. Syst. Struct. 1997, 8, 1001–1011. [Google Scholar] [CrossRef]
- Bobji, M.S.; Ramanujan, C.S.; Pethica, J.B.; Inkson, B.J. A Miniaturized TEM Nanoindenter for Studying Material Deformation In Situ. Meas. Sci. Technol. 2006, 17, 1324–1329. [Google Scholar] [CrossRef]
- Chuang, T.; de Lozanne, A. Compact Variable-Temperature Scanning Force Microscope. Rev. Sci. Instrum. 2007, 78, 053710. [Google Scholar] [CrossRef] [PubMed]
- Anantheshwara, K.; Murali, N.S.; Bobji, M.S. Effect of Friction on the Performance of Inertial Slider. Sādhanā 2008, 33, 221–226. [Google Scholar] [CrossRef]
- Yamagata, Y.; Higuchi, T.; Saeki, H.; Ishimaru, H. Ultrahigh Vacuum Precise Positioning Device Utilizing Rapid Deformations of Piezoelectric Elements. J. Vac. Sci. Technol. A Vac. Surf. Films 1990, 8, 4098–4100. [Google Scholar] [CrossRef]
- Asenjo, A.; Buendía, A.; Gómez-Rodriguez, J.M.; Baró, A.M. Scanning Tunneling Microscopy/Scanning Electron Microscopy Combined Instrument. J. Vac. Sci. Technol. B 1994, 12, 1658–1661. [Google Scholar] [CrossRef]
- Woodburn, C.N.; McKinnon, A.W.; Roberts, D.A.; Taylor, M.E.; Welland, M.E. A One-Dimensional Piezoelectric Driven Inertial Micropositioner with Vertical Capabilities. Meas. Sci. Technol. 1993, 4, 535–537. [Google Scholar] [CrossRef]
- Physik Instrumente (PI). Data Sheet N-412. 2014. Available online: http://www.physikinstrumente.com/download/PI_DataSheet_N-412_42151.pdf (accessed on 4 October 2015).
- Svensson, K.; Jompol, Y.; Olin, H.; Olsson, E. Compact Design of a Transmission Electron Microscope-Scanning Tunneling Microscope Holder with Three-Dimensional Coarse Motion. Rev. Sci. Instrum. 2003, 74, 4945–4947. [Google Scholar] [CrossRef]
- Silveira, W.R.; Marohn, J.A. A Vertical Inertial Coarse Approach for Variable Temperature Scanned Probe Microscopy. Rev. Sci. Instrum. 2003, 74, 267–269. [Google Scholar] [CrossRef]
- Curtis, R.; Pearson, C.; Gaard, P.; Ganz, E. A Compact Micropositioner for Use in Ultrahigh Vacuum. Rev. Sci. Instrum. 1993, 64, 2687–2690. [Google Scholar] [CrossRef]
- Smith, W.F.; Abraham, M.C.; Sloan, J.M.; Switkes, M. Simple Retrofittable Long-Range x-y Translation System for Scanned Probe Microscopes. Rev. Sci. Instrum. 1996, 67, 3599–3604. [Google Scholar] [CrossRef]
- Wang, J.; Lu, Q. How are the Behaviors of Piezoelectric Inertial Sliders Interpreted? Rev. Sci. Instrum. 2012, 83, 093701. [Google Scholar] [CrossRef] [PubMed]
- Juhas, L.; Vujanic, A.; Adamovic, N.; Nagy, L.; Borovac, B. A Platform for Micropositioning based on Piezo Legs. Mechatronics 2001, 11, 869–897. [Google Scholar] [CrossRef]
- Tuncdemir, S.; Ural, S.O.; Koc, B.; Uchino, K. Rotary/Linear Double-Action Metal Tube Ultrasonic Motor with Slanted PZT Ceramic Plates. In ACTUATOR 10 Conference Proceedings; Wirtschaftsförderung Bremen: Bremen, Germany, 2010; pp. 177–180. [Google Scholar]
- Judy, J.W.; Polla, D.L.; Robbins, W.P. Experimental Model and IC-Process Design of a Nanometer Linear Piezoelectric Stepper Motor. In Microstructures, Sensors, and Actuators; The American Society of Mechanical Engineers: Dallas, TX, USA, 1990; pp. 11–17. [Google Scholar]
- Ookoshi, M.; Sakano, S. Microstep X-Y-theta Table Using Three-Pole Piezoelectric Tube Actuator. Trans. Jpn. Soc. Mech. Eng. C 1996, 596, 1392–1396. (In Japanese) [Google Scholar] [CrossRef]
- Morita, T.; Nishimura, T.; Yoshida, R.; Hosaka, H. Resonant-Type Smooth Impact Drive Mechanism Actuator Operating at Lower Input Voltages. Jpn. J. Appl. Phys. 2013, 52, 07HE05. [Google Scholar] [CrossRef]
- Dubois, F.; Belly, C.; Saulot, A.; Berthier, Y. Design of a Dynamic Tribometer Applied to Piezoelectric Inertia Drive Motors-In Situ Exploration of Stick-Slip Principle. Tribol. Online 2016, 11, 218–226. [Google Scholar] [CrossRef]
- Erlandsson, R.; Olsson, L. A Three-Axis Micropositioner for Ultrahigh Vacuum Use Based on the Inertial Slider Principle. Rev. Sci. Instrum. 1996, 67, 1472–1474. [Google Scholar] [CrossRef]
- Van Hees, I.J.B.; Nijsse, G.J.B.; Spronck, J.W. A Manipulator Using Piezos in the Inertial Sliding Mode for the Actuation in Six Degrees of Freedom Simultaneously. In ACTUATOR 98 Conference Proceedings; Messe Bremen: Bremen, Germany, 1998; pp. 245–248. [Google Scholar]
- Ko, H.P.; Kang, C.Y.; Kim, J.S.; Borodin, S.N.; Kim, S.; Yoon, S.J. Constructions and Characteristics of a Tiny Piezoelectric Linear Motor Using Radial Mode Vibrations. J. Electroceram. 2006, 17, 603–608. [Google Scholar] [CrossRef]
- Edeler, C.; Meyer, I.; Fatikow, S. Simulation and Measurements of Stick-Slip-Microdrives for Nanorobots. In New Trends in Mechanism Science; Pisla, D., Ceccarelli, M., Husty, M., Corves, B., Eds.; Springer: Dordrecht, The Netherlands, 2010; Volume 5. [Google Scholar]
- Hata, Y.; Okamoto, Y. Linear Actuator. US Patent Application 2003/0,222,538 A1, 4 December 2003. [Google Scholar]
- Kortschack, A.; Hanbler, O.C.; Rass, C.; Fatikow, S. Driving Principles of Mobile Microrobots for Micro- and Nanohandling. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; Volume 2, pp. 1895–1900.
- Dahl, P.R. A Solid Friction Model; Technical Report; The Aerospace Corporation: El Segundo, CA, USA, 1968. [Google Scholar]
- Canudas de Wit, C.; Olsson, H.; Astrom, K.J.; Lischinsky, P. A New Model for Control of Systems with Friction. IEEE Trans. Autom. Control 1995, 40, 419–425. [Google Scholar] [CrossRef]
- Liu, Y.F.; Li, J.; Hu, X.H.; Zhang, Z.M.; Cheng, L.; Lin, Y.; Zhang, W.J. Modeling and Control of Piezoelectric Inertia–Friction Actuators: Review and Future Research Directions. Mech. Sci. 2015, 6, 95–107. [Google Scholar] [CrossRef]
- Altpeter, F. Friction Modeling, Identification and Compensation. Ph.D. Thesis, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 1999. [Google Scholar]
- Edeler, C.; Meyer, I.; Fatikow, S. Modeling of Stick-Slip Micro-Drives. J. Micro-Nano Mechatron. 2011, 6, 65–87. [Google Scholar] [CrossRef]
- Teidelt, E.; Willert, E.; Filippov, A.E.; Popov, V.L. Modeling of the Dynamic Contact in Stick-Slip Microdrives Using the Method of Reduction of Dimensionality. Phys. Mesomech. 2012, 15, 287–292. [Google Scholar] [CrossRef]
- Kang, D. Modeling of the Piezoelectric-Driven Stick-Slip Actuators. Master’s Thesis, Department of Mechanical Engineerung, University of Saskatchewan, Saskatoon, Kanada, 2007. Available online: http://library2.usask.ca/theses/submitted/etd-11152007-200332/unrestricted/kang_d.pdf (accessed on 19 November 2015). [Google Scholar]
- Peng, J.Y.; Chen, X.B. Modeling of Piezoelectric-Driven Stick–Slip Actuators. IEEE/ASME Trans. Mechatron. 2011, 16, 394–399. [Google Scholar] [CrossRef]
- Dupont, P.; Hayward, V.; Armstrong, B.; Altpeter, F. Single State Elastoplastic Friction Models. IEEE Trans. Autom. Control 2002, 47, 787–792. [Google Scholar] [CrossRef]
- Yoshida, R.; Sueyoshi, H.; Shinke, S.; Yamamoto, S. Drive Device. EP Patent Application 2,006,995 A1, 24 December 2008. [Google Scholar]
- Teidelt, E. Oscillating Contacts: Friction Induced Motion and Control of Friction. Ph.D. Thesis, Technical University of Berlin, Berlin, Germany, 2015. [Google Scholar]
- Fatikow, S. Mikroroboter und Mikromontage; Teubner: Stuttgart, Germany, 2000. (In German) [Google Scholar]
- Kleindiek, S. Electromechanical Positioning Device. WO Patent Application 1994/06,160, 17 March 1994. [Google Scholar]
- Chang, S.H.; Li, S.S. A High Resolution Long Travel Friction-Drive Micropositioner with Programmable Step Size. Rev. Sci. Instrum. 1999, 70, 2776–2782. [Google Scholar] [CrossRef]
- Belly, C.; Claeyssen, F.; Le Letty, R.; Porchez, T. Benefits from Amplification of Piezo Actuation in Inertial Stepping Motors and application for High-performance Linear Micro Motors. In ACTUATOR 10 Conference Proceedings; Wirtschaftsförderung Bremen: Bremen, Germany, 2010; pp. 198–201. [Google Scholar]
- Chen, J.; Pietzsch, O.; Haude, D. Piezoelektrischer Motor. DE Patent 102,005,023,988 B4, 1 March 2007. (In German)[Google Scholar]
- Bergander, A.; Canales, C.; Boetsch, G.; Maeder, T.; Corradini, G.; Breguet, J.M. A Modular Actuator Aystem for Miniature Positioning Systems. In ACTUATOR 08 Conference Proceedings; Hanseatische Veranstaltungs-GmbH: Bremen, Germany, 2008; pp. 1009–1012. [Google Scholar]
- John, S.; Sirohi, J.; Wang, G.; Wereley, N.M. Comparison of Piezoelectric, Magnetostrictive, and Electrostrictive Hybrid Hydraulic Actuators. J. Intell. Mater. Syst. Struct. 2007, 18, 1035–1048. [Google Scholar] [CrossRef]
- Higuchi, T.; Watanabe, M. Apparatus for Effecting Fine Movement by Impact Force Produced by Piezoelectric or Electrostrictive Element. US Patent 4,894,579, 16 January 1990. [Google Scholar]
- Zrenner, A. Piezoelektrischer oder elektrostriktiver Trägheitsantrieb zum Verschieben oder Positionieren von insbesondere schweren Objekten. DE Patent 19,644,550 C1, 10 June 1998. (In German)[Google Scholar]
- Kim, B.G.; Vasiljev, P.; Yoon, S.M.; Yoon, S.I. Small-Sized Piezoelectric/Electrostrictive Ultrasonic Linear Motor. KR Patent 1,020,040,027,753 A, 3 March 2004. Korean, Analysed Using the Translation From “Korean Patent Abstracts”, http://kpa.kipris.or.kr/kpa. [Google Scholar]
- Yoshida, R.; Tanii, J.; Okamoto, Y.; Yuasa, T. Drive Mechanism Employing Electromechanical Transducer and Method for Controlling the Drive Mechanism. US Patent 6,717,329 B2, 6 April 2004. [Google Scholar]
- Vasiljev, P.; Bo, K.K.; Seok, M.Y.; Seong, Y.Y. Small Piezoelectric Or Electrostrictive Linear Motor. US Patent Application 2007/0,120,442 A1, 3 October 2007. [Google Scholar]
- Yoon, S.Y.; Vasiljev, P.; Kim, B.K.; Yoon, S.M. Small Piezoelectric or Electrostrictive Linear Motor. EP Patent 1,721,382 B1, 25 August 2010. [Google Scholar]
- Lindensmith, C.; Chave, R. Magnetostrictive Inertial-Reaction Linear Motors. Nasa Tech Briefs. 1998. Available online: http://www.techbriefs.com/component/content/article/2146 (accessed on 2 March 2011).
- Dooley, J.A.; Lindensmith, C.A.; Chave, R.G.; Fultz, B.; Graetz, J. Cryogenic Magnetostrictive Actuators: Materials and Applications. In ACTUATOR 98 Conference Proceedings; Messe Bremen: Bremen, Germany, 1998; pp. 407–410. [Google Scholar]
- Weisensel, G.N.; McMasters, O.D.; Chave, R.G. Cryogenic Magnetostrictive Transducers and Devices for Commercial, Military, and Space Applications. Proc. SPIE 1998, 3326, 459–470. [Google Scholar]
- Zhang, Z.G.; Ueno, T.; Higuchi, T. Magnetostrictive Actuating Device Utilizing Impact Forces Coupled with Friction Forces. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 464–469.
- Ueno, T.; Saito, C.; Imaizumi, N.; Higuchi, T. Miniature Spherical Motor Using Iron-Gallium Alloy (Galfenol). Sens. Actuators A Phys. 2009, 154, 92–96. [Google Scholar] [CrossRef]
- Yamagata, Y.; Higuchi, T.; Nakamura, N.; Hamamura, S. A Micro Mobile Mechanism Using Thermal Expansion and its Theoretical Analysis. A Comparison with Impact Drive Mechanism Using Piezoelectric Elements. In Proceedings of the IEEE Workshop on Micro Electro Mechanical Systems, Oiso, Japan, 25–28 January 1994; pp. 142–147.
- Yamagata, Y.; Higuchi, T.; Ohmichi, O. A Micro Mobile Mechanism Driven by Impulsive Inertial Force. In ACTUATOR 96 Conference Proceedings; AXON Technologie Consult: Bremen, Germany, 1996; pp. 68–71. [Google Scholar]
- Ohmichi, O.; Yamagata, Y.; Higuchi, T. Micro Impact Drive Mechanisms Using Optically Excited Thermal Expansion. J. Microelectromech. Syst. 1997, 6, 200–207. [Google Scholar] [CrossRef]
- Sul, O.J.; Falvo, M.R.; Taylor, R.M.; Washburn, S.; Superfine, R. Thermally Actuated Untethered Impact-Driven Locomotive Microdevices. Appl. Phys. Lett. 2006, 89, 203512. [Google Scholar] [CrossRef]
- Pertsch, P. Das Großsignalverhalten elektromechanischer Festkörperaktoren. Ph.D. Thesis, Technische Universität Ilmenau, Ilmenau, Germany, 2003. [Google Scholar]
- Reiländer, U. Das Großsignalverhalten piezoelektrischer Aktoren; Fortschritt-Berichte VDI; VDI-Verlag: Düsseldorf, Germany, 2003. Reihe 8, Nr. 985. (In German) [Google Scholar]
- Von Wagner, U. Nichtlineare Effekte bei Piezokeramiken unter schwachem elektrischem Feld. Experimentelle Untersuchung und Modellbildung, Habilitation; Technische Universität Darmstadt: Darmstadt, Germany, 2003. (In German) [Google Scholar]
- Kuhnen, K. Inverse Steuerung piezoelektrischer Aktoren mit Hysterese-, Kriech- und Superpositionsoperatoren. Ph.D. Thesis, Universität des Saarlandes, Saarbrücken, Germany, 2001. [Google Scholar]
- Hegewald, T. Modellierung des nichtlinearen Verhaltens piezokeramischer Aktoren. Ph.D. Thesis, Universität Erlangen-Nürnberg, Erlangen, Germany, 2008. [Google Scholar]
- Ge, P.; Jouaneh, M. Modeling Hysteresis in Piezoceramic Actuators. Precis. Eng. 1995, 17, 211–221. [Google Scholar] [CrossRef]
- Goldfarb, M.; Celanovic, N. A Lumped Parameter Electromechanical Model for Describing the Nonlinear Behavior of Piezoelectric Actuators. J. Dyn. Syst. Meas. Control 1997, 119, 478–485. [Google Scholar] [CrossRef]
- Song, D.; Li, C.J. Modeling of Piezo Actuator’s Nonlinear and Frequency Dependent Dynamics. Mechatronics 1999, 9, 391–410. [Google Scholar] [CrossRef]
- Jung, H.; Gweon, D.G. Creep Characteristics of Piezoelectric Actuators. Rev. Sci. Instrum. 2000, 71, 1896. [Google Scholar] [CrossRef]
- Lee, S.H.; Royston, T.J.; Friedman, G. Modeling and Compensation of Hysteresis in Piezoceramic Transducers for Vibration Control. J. Intell. Mater. Syst. Struct. 2000, 11, 781–790. [Google Scholar] [CrossRef]
- Croft, D.; Shed, G.; Devasia, S. Creep, Hysteresis, and Vibration Compensation for Piezoactuators: Atomic Force Microscopy Application. J. Dyn. Syst. Meas. Control 2001, 123, 35–43. [Google Scholar] [CrossRef]
- Song, G.; Zhao, J.; Zhou, X.; De Abreu-Garcia, J. Tracking Control of a Piezoceramic Actuator with Hysteresis Compensation Using Inverse Preisach Model. IEEE/ASME Trans. Mechatron. 2005, 10, 198–209. [Google Scholar] [CrossRef]
- Graffel, B.; Müller, F.; Müller, A.D.; Hietschold, M. Feedforward Correction Of Nonlinearities in Piezoelectric Scanner Constructions and its Experimental Verification. Rev. Sci. Instrum. 2007, 78, 053706. [Google Scholar] [CrossRef] [PubMed]
- Janocha, H.; Pesotski, D.; Kuhnen, K. FPGA-Based Compensator of Hysteretic Actuator Nonlinearities for Highly Dynamic Applications. IEEE/ASME Trans. Mechatron. 2008, 13, 112–116. [Google Scholar] [CrossRef]
- Kuhnen, K. Kompensation komplexer gedächtnisbehafteter Nichtlinearitäten in Systemen mit aktiven Materialien; Shaker: Aachen, Germany, 2008. (In German) [Google Scholar]
- Zhang, X.; Tan, Y. A Hybrid Model for Rate-Dependent Hysteresis in Piezoelectric Actuators. Sens. Actuators A Phys. 2010, 157, 54–60. [Google Scholar] [CrossRef]
- Ting, Y.; Li, C.; Lin, C. Using A Piezo-driven Microstage for High-frequency Cutting. Precis. Eng. 2011, 35, 455–463. [Google Scholar] [CrossRef]
- Kim, B.; Washington, G.N.; Yoon, H.S. Hysteresis-Reduced Dynamic Displacement Control of Piezoceramic Stack Actuators Using Model Predictive Sliding Mode Control. Smart Mater. Struct. 2012, 21, 055018. [Google Scholar] [CrossRef]
- Comstock, R.H. Charge Control of Piezoelectric Actuators to Reduce Hysteresis Effects. US Patent 4,263,527, 21 April 1981. [Google Scholar]
- Newcomb, C.; Flinn, I. Improving the Linearity of Piezoelectric Ceramic Actuators. Electron. Lett. 1982, 18, 442–444. [Google Scholar] [CrossRef]
- Aphale, S.S.; Devasia, S.; Reza Moheimani, S.O. High-Bandwidth Control of a Piezoelectric Nanopositioning Stage in The Presence of Plant Uncertainties. Nanotechnology 2008, 19, 125503. [Google Scholar] [CrossRef] [PubMed]
- Fleming, A.; Moheimani, S. Sensorless Vibration Suppression and Scan Compensation for Piezoelectric Tube Nanopositioners. IEEE Trans. Control Syst. Technol. 2006, 14, 33–44. [Google Scholar] [CrossRef]
- Špiller, M.; Hurák, Z. Hybrid Charge Control for Stick–Slip Piezoelectric Actuators. Mechatronics 2011, 21, 100–108. [Google Scholar] [CrossRef]
- Bazghaleh, M.; Grainger, S.; Mohammadzaheri, M.; Cazzolato, B.; Lu, T.F. A Digital Charge amplifier for Hysteresis Elimination in Piezoelectric Actuators. Smart Mater. Struct. 2013, 22, 075016. [Google Scholar] [CrossRef]
- Amin-Shahidi, D.; Trumper, D.L. Improved Charge Amplifier Using Hybrid Hysteresis Compensation. Rev. Sci. Instrum. 2013, 84, 085115. [Google Scholar] [CrossRef]
- Kaizuka, H.; Siu, B. A Simple Way to Reduce Hysteresis and Creep When Using Piezoelectric Actuators. Jpn. J. Appl. Phys. 1988, 27, L773–L776. [Google Scholar] [CrossRef]
- Tapson, J.; Greene, J.R. A Simple Dynamic Piezoelectric X-Y Translation Stage Suitable for Scanning Probe Microscopes. Rev. Sci. Instrum. 1993, 64, 2387–2388. [Google Scholar] [CrossRef]
- Munassypov, R.; Grossmann, B.; Magnussen, B.; Fatikow, S. Development and Control of Piezoelectric Actuators for a Mobile Micromanipulation System. In ACTUATOR 96 Conference Proceedings; AXON Technologie Consult: Bremen, Germany, 1996. [Google Scholar]
- Schmitt, C.; Breguet, J.M.; Bergander, A.; Clavel, R. Stick and Slip Actuators (SSA). Proc. SPIE 2000, 4194, 65–74. [Google Scholar]
- Nomura, Y.; Aoyama, H. Development of Inertia Driven Micro Robot with Nano Tilting Stage for SEM Operation. Microsyst. Technol. 2007, 13, 1347–1352. [Google Scholar] [CrossRef]
- Karrai, K. Inertial Positioner. EP Patent Specification 0,823,738 B1, 7 September 2005. [Google Scholar]
- Stieg, A.Z.; Wilkinson, P.; Gimzewski, J.K. Vertical Inertial Sliding drive for Coarse and Fine Approaches in Scanning Probe Microscopy. Rev. Sci. Instrum. 2007, 78, 036110. [Google Scholar] [CrossRef] [PubMed]
- Zhao, C.; Shi, Y. Square-Wave Driving Inertia Linear Piezoelectric Motor. CN 101071998 A. 2007. Available online: http://www.directorypatent.com/C2N/200710020966.html (accessed on 4 October 2015). (In Chinese)
- Brockenbrough, R.T.; Lyding, J.W. Inertial Tip Translator for a Scanning Tunneling Microscope. Rev. Sci. Instrum. 1993, 64, 2225–2228. [Google Scholar] [CrossRef]
- Gulyaev, P.V.; Shelkovnikov, Y.K.; Tyurikov, A.V.; Osipov, N.I. High-Accuracy Inertial Rotation-Linear Piezoelectric Drive. Russ. Electr. Eng. 2011, 81, 521–523. [Google Scholar] [CrossRef]
- Shrikanth, V.; Simha, K.; Bobji, M. Frictional Force Measurement During Stick-Slip Motion of a Piezoelectric Walker. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 1463–1468.
- Reymond, S.; Fischer, O. Low Temperature Scanning Sontact Potentiometry. Rev. Sci. Instrum. 2004, 75, 694–698. [Google Scholar] [CrossRef]
- Lim, K.J.; Lee, J.S.; Park, S.H.; Kang, S.H.; Kim, H.H. Fabrication and Characteristics of Impact Type Ultrasonic Motor. J. Eur. Ceram. Soc. 2007, 27, 4159–4162. [Google Scholar] [CrossRef]
- Yoshida, R.; Higuchi, T.; Hamamatsu, A. Actuator Using Electromechanical Transducer and Drive Pulse Generator Suitable Thereof. US Patent 6,218,764 B1, 17 April 2001. [Google Scholar]
- Yoshida, R.; Okamoto, Y.; Hiroyuki, O. Development of Smooth Impact Drive Mechanism (2nd Report): Optimization of Waveform of Driving Voltage. J. Jpn. Soc. Precis. Eng. 2002, 68, 536–541. (In Japanese) [Google Scholar] [CrossRef]
- Koc, B. Piezoelectric Motor, Operates by Exciting Multiple Harmonics of a Square Plate. In ACTUATOR 10 Conference Proceedings; Wirtschaftsförderung Bremen: Bremen, Germany, 2010; pp. 194–197. [Google Scholar]
- Mazeika, D.; Vasiljev, P. Linear Inertial Piezoelectric Motor with Bimorph Disc. Mech. Syst. Signal Process. 2011, 36, 110–117. [Google Scholar] [CrossRef]
- Chen, W.M.; Chan, C.H.; Liu, T.S. The Study of a Dual-Disk Type Piezoelectric Actuator. Math. Probl. Eng. 2013, 2013, 108912. [Google Scholar] [CrossRef]
- Ma, Y.; Shekhani, H.; Yan, X.; Choi, M.; Uchino, K. Resonant-type Inertial Impact Motor with Rectangular Pulse Drive. Sens. Actuators A Phys. 2016, 248, 29–37. [Google Scholar] [CrossRef]
- Ling, S.F.; Du, H.; Jiang, T. Analytical and Experimental Study on a Piezoelectric Linear Motor. Smart Mater. Struct. 1998, 7, 382–388. [Google Scholar] [CrossRef]
- Hunstig, M.; Hemsel, T. Drive Signals for Maximizing the Velocity of Piezoelectric Inertia Motors. J. Korean Phys. Soc. 2010, 57, 938–941. [Google Scholar]
- Dubois, F.; Belly, C.; Saulot, A.; Berthier, Y. Stick-Slip in Stepping Piezoelectric Inertia Drive Motors—Mechanism Impact on a Rubbing Contact. Tribol. Int. 2016, 100, 371–379. [Google Scholar] [CrossRef]
- Bergander, A.; Breguet, J.M. Performance Improvements for Stick-Slip Positioners. In Proceedings of the 2003 International Symposium on Micromechatronics and Human Science, Nagoya, Japan, 19–22 October2003; pp. 59–66.
- Singhose, W.; Seering, W. Command Generation for Dynamic Systems; Lulu Press, Inc.: Raleigh, NC, USA, 2011. [Google Scholar]
- Zou, Q.; Vander Giessen, C.; Garbini, J.; Devasia, S. Precision tracking of driving wave forms for inertial reaction devices. Rev. Sci. Instrum. 2005, 76, 023701. [Google Scholar] [CrossRef]
- Hunstig, M.; Hemsel, T.; Sextro, W. Frequency Response Based Control for Arbitrary Trajectories of Piezoelectric Actuators. In Proceedings of the 7th International Workshop on Piezoelectric Materials and Applications in Actuators, Antalya, Turkey, 10–13 October 2010.
- Hunstig, M.; Hemsel, T.; Sextro, W. Improving the Performance of Piezoelectric Inertia Motors. In ACTUATOR 10 Conference Proceedings; Wirtschaftsförderung Bremen: Bremen, Germany, 2010; pp. 657–661. [Google Scholar]
- Hunstig, M.; Hemsel, T.; Sextro, W. An Efficient Simulation Technique for High-Frequency Piezoelectric Inertia Motors. In Proceedings of the 2012 International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 277–280.
- Yoshida, R.; Okamoto, Y.; Okada, H. Driving Apparatus and Method of Using Same. US Patent Application 2001/0,026,112 A1, 4 October 2001. [Google Scholar]
- Okamoto, Y.; Yoshida, R.; Sueyoshi, H. The Development of a Smooth Impact Drive Mechanism (SIDM) Using a Piezoelectric Element. Konica Minolta Technol. Rep. 2004, 1, 23–26. (In Japanese) [Google Scholar]
- Vasiljev, P. Multi-functional Inertial Piezoelectric Motors. In ACTUATOR 12 Conference Proceedings; Wirtschaftsförderung Bremen: Bremen, Germany, 2012; pp. 773–776. [Google Scholar]
- Yuasa, T.; Yoshida, R. Drive Mechanism Employing Electromechanical Transducer and Drive Method Therefor. US Patent 6,803,699 B2, 12 October 2004. [Google Scholar]
- Yokose, T.; Hosaka, H.; Yoshida, R.; Morita, T. Resonance Frequency Ratio Control with an Additional Inductor for a Miniaturized Resonant-type SIDM Actuator. Sens. Actuators A Phys. 2014, 214, 142–148. [Google Scholar] [CrossRef]
- Yoshida, R.; Hoshino, T.; Yuasa, T. Driving Device. US Patent Application 2011/0,080,121 A1, 7 April 2011. [Google Scholar]
- Driesen, W.; Bergander, A.; Varidel, T.; Breguet, J. Energy Consumption of Piezoelectric Actuators for Inertial Drives. In Proceedings of the 2003 International Symposium on Micromechatronics and Human Science, Nagoya, Japan, 19–22 October 2003; pp. 51–58.
- Uchino, K. Piezoelectric Motors and Transformers. In Piezoelectricity: Evolution and Future of a Technology; Heywang, W., Lubitz, K., Wersing, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 257–277. [Google Scholar]
- Littmann, W.; Storck, H.; Wallaschek, J. Sliding Friction in the Presence of Ultrasonic Oscillations: Superposition of Longitudinal Oscillations. Arch. Appl. Mech. 2001, 71, 549–554. [Google Scholar] [CrossRef]
- Teidelt, E.; Starcevic, J.; Popov, V. Influence of Ultrasonic Oscillation on Static and Sliding Friction. Tribol. Lett. 2012, 48, 51–62. [Google Scholar] [CrossRef]
- Dunst, P. Anregungssignaloptimierung für hochfrequente Trägheitsmotoren. Bachelor’s Thesis, Lehrstuhl für Mechatronik und Dynamik, Universität Paderborn, Paderborn, Germany, 2013. [Google Scholar]
- Qiu, W.; Yosuke, M.; Nakamura, K. Experimental Verification and Modeling of High-Efficiency Operation in Lubricated Ultrasonic Motors. In Proceedings of the 2012 International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 1810–1813.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fixed Actuator Inertia Motors | |
| + | can use the kinetic energy of the slider for additional movement during/after retraction of the slider (relevant mostly in high-frequency operation) |
| + | moving mass m can be very small, and has no effect on the frequency characteristics of the stator |
| + | higher possible operation frequencies, thus higher possible velocities |
| − | displacement limited by the length of the rod |
| Moving Actuator Inertia Motors | |
| + | additional motion can be generated by the ”impact” of the mass (relevant mostly in low-frequency operation) |
| + | does not require fixation |
| + | displacement limited only by the surface it operates on and by the wiring |
| − | requires a proper, well machined surface to operate reliably |
| − | mass must be relatively large; this makes the motor heavy and limits excitation frequency and maximum velocity |
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hunstig, M. Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives. Actuators 2017, 6, 7. https://doi.org/10.3390/act6010007
Hunstig M. Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives. Actuators. 2017; 6(1):7. https://doi.org/10.3390/act6010007
Chicago/Turabian StyleHunstig, Matthias. 2017. "Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives" Actuators 6, no. 1: 7. https://doi.org/10.3390/act6010007