
Acoustic-Based Cutting Pattern Recognition for Shearer through Fuzzy C-Means and a Hybrid Optimization Algorithm


Abstract
:1. Introduction
2. Background
2.1. Fuzzy C-Means Clustering Algorithm
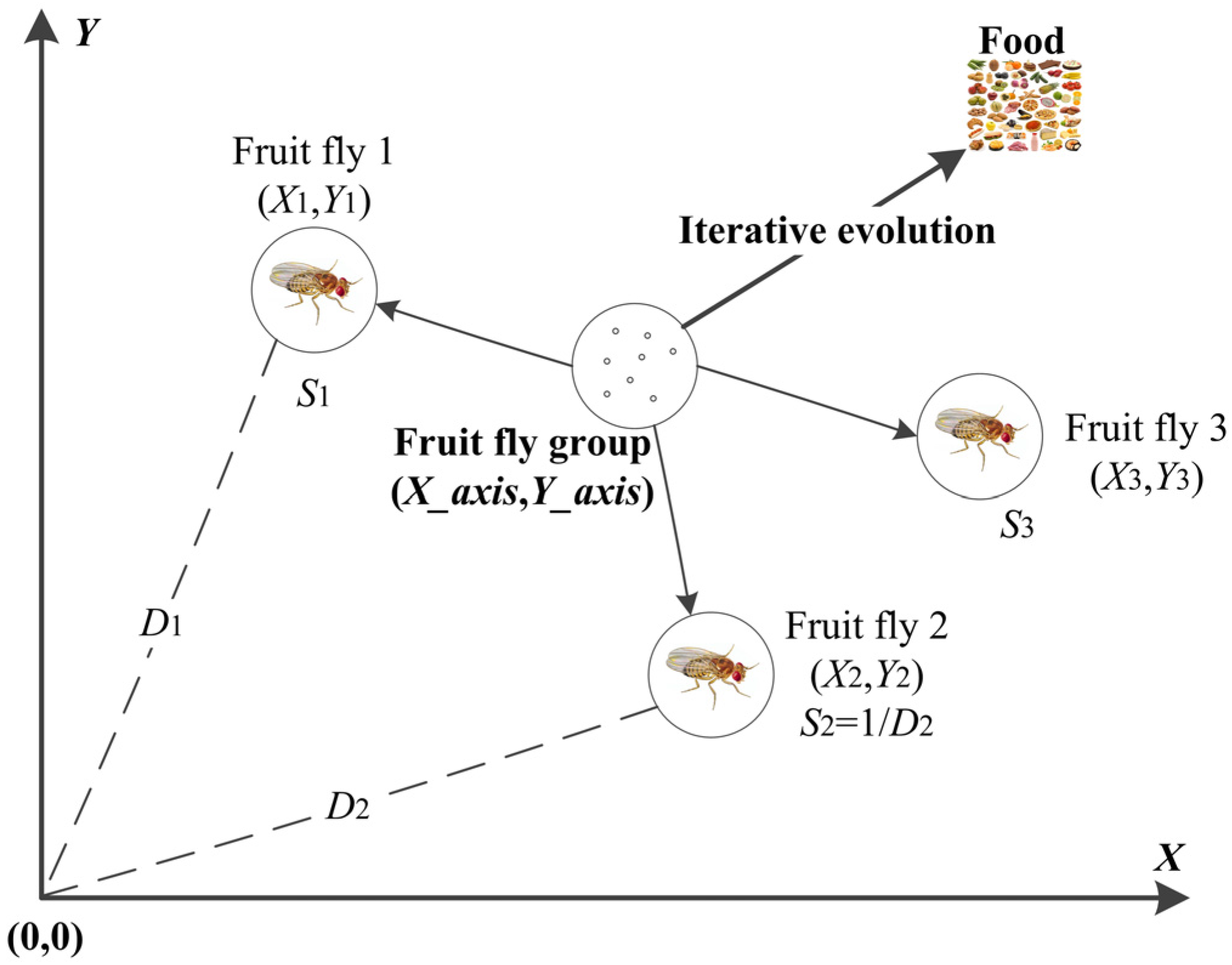
2.2. Fruit Fly Optimization Algorithm
2.3. Genetic Algorithm
3. The Proposed Method
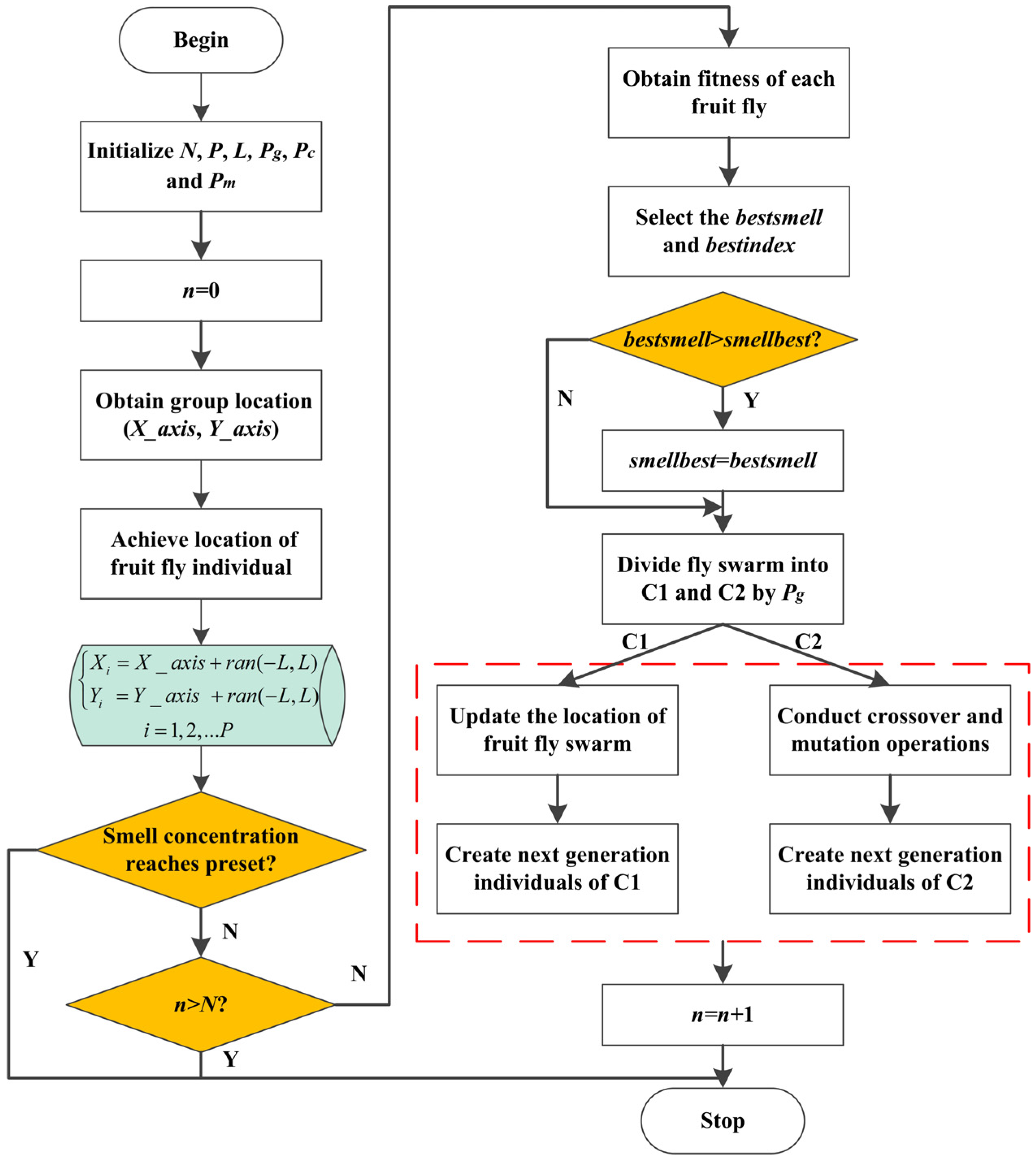
3.1. Hybrid Optimization Algorithm
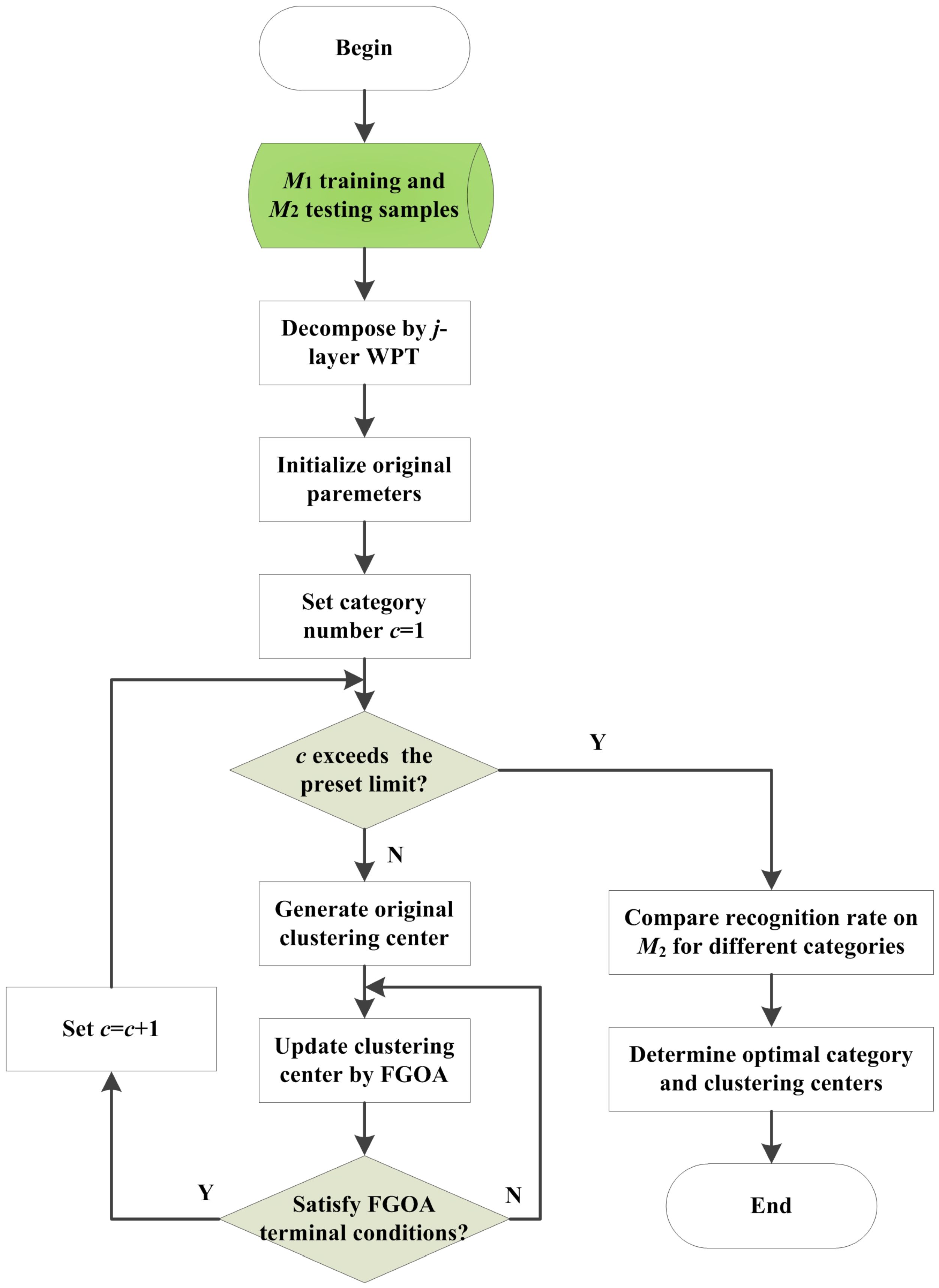
3.2. Flow of the Recognition Method
4. Simulation and Analysis
4.1. Data Acquisition
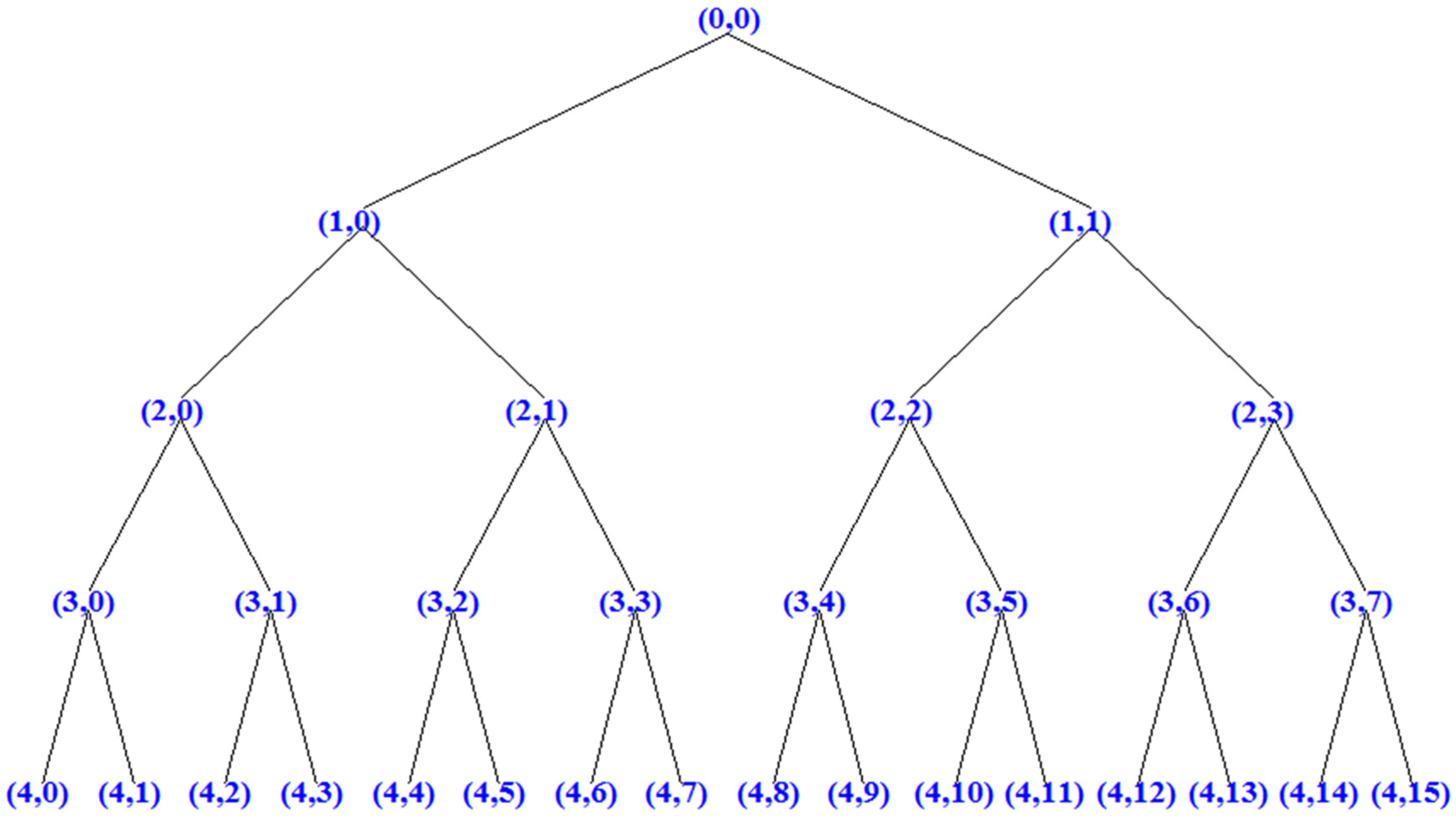
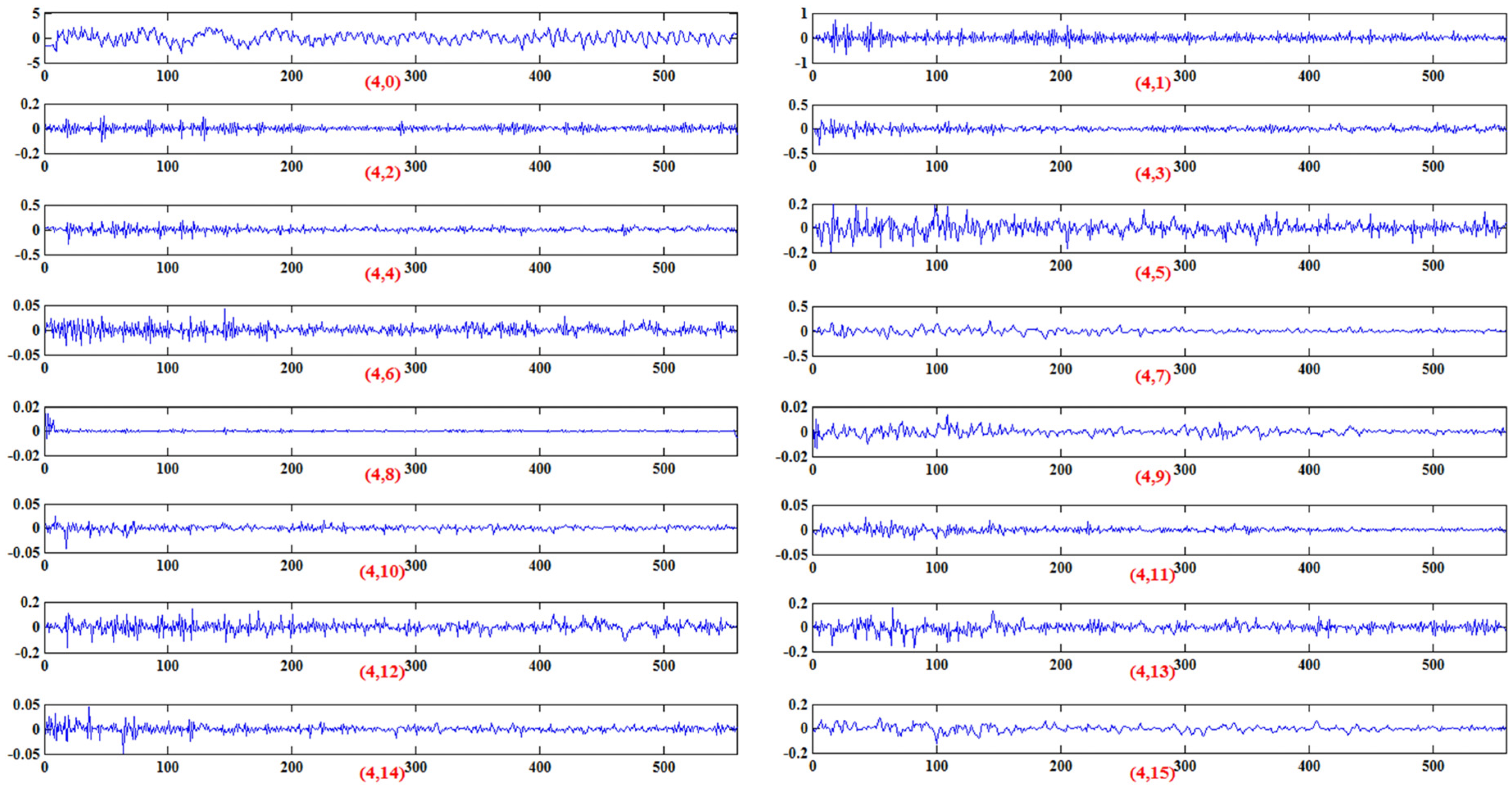
4.2. Pretreatment on Sample Data
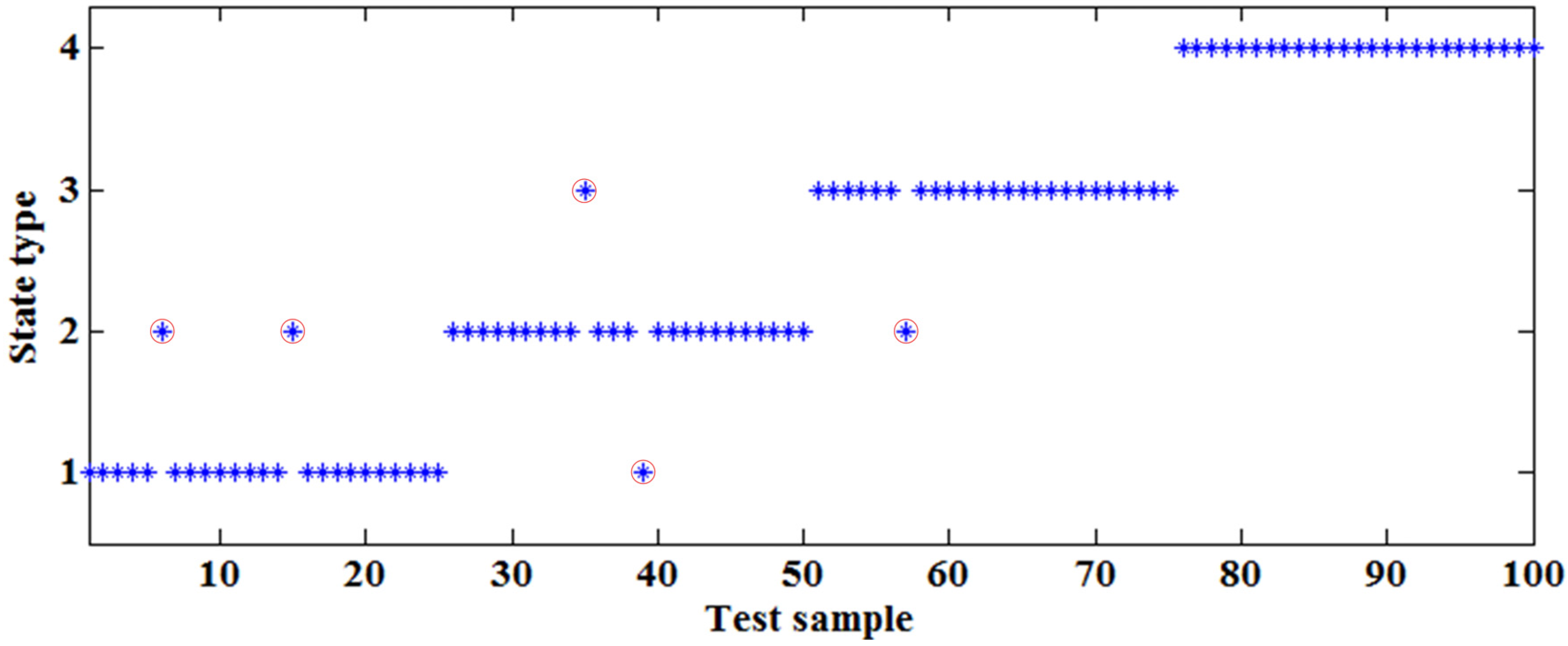
4.3. Clustering Analysis
4.4. Comparison with the Literature
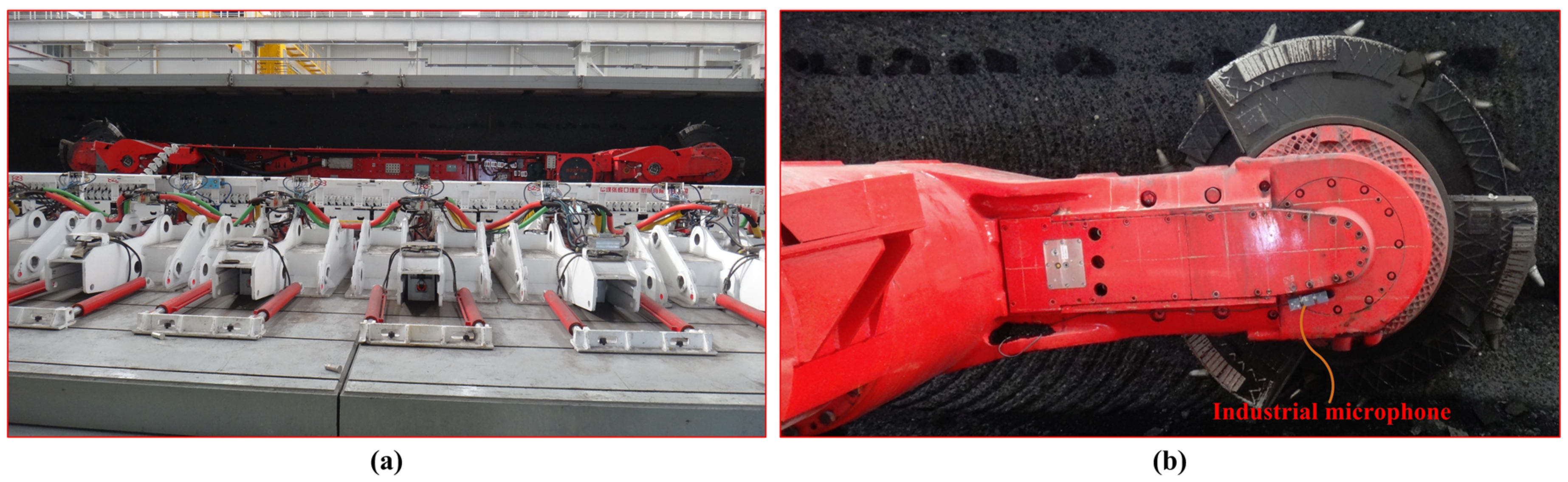
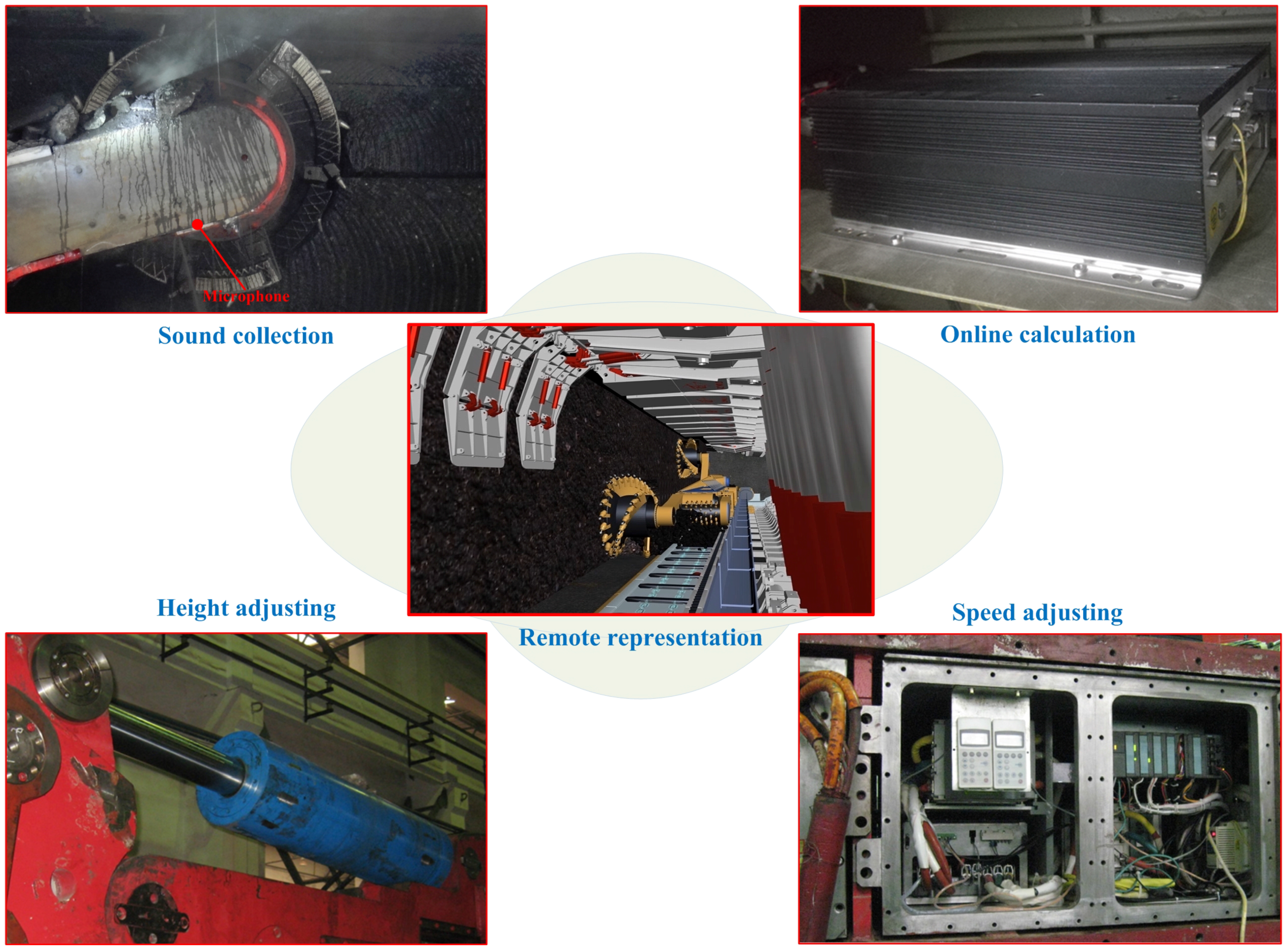
5. Industrial Application
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xu, J.L.; Wang, Z.C.; Zhang, W.Z.; He, Y.P. Coal-rock interface recognition based on MFCC and neural network. Int. J. Signal Process. Image Process. Pattern Recognit. 2013, 6, 191–200. [Google Scholar] [CrossRef]
- Bessinger, S.L.; Neison, M.G. Remnant roof coal thickness measurement with passive gamma ray instruments in coal mine. IEEE Trans. Ind. Appl. 1993, 29, 562–565. [Google Scholar] [CrossRef]
- Sun, J.P.; She, J. Coal-rock imagefeature extraction and recognition based on support vector machine. J. China Coal Soc. 2013, 38, 508–512. [Google Scholar]
- Si, L.; Wang, Z.B.; Tan, C.; Liu, X.H. A novel approach for coal seam terrain prediction through information fusion of improved D–S evidence theory and neural network. Measurement 2014, 54, 140–151. [Google Scholar] [CrossRef]
- Wang, B.P.; Wang, Z.C.; Zhang, W.Z. Coal-rock interface recognition method based on EMD and neural network. J. Vib. Meas. Diagn. 2012, 32, 586–590. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y. Recognition system of coal and rock on mechanized coal mining face. Adv. Inf. Sci. Serv. Sci. 2012, 4, 101–107. [Google Scholar]
- Ramathilagam, S.; Huang, Y.M. Extended Gaussian kernel version of fuzzy c-means in the problem of data analyzing. Expert Syst. Appl. 2011, 38, 3793–3805. [Google Scholar] [CrossRef]
- Yin, P.Y.; Chen, L.H. A new non-iterative approach for clustering. Pattern Recognit. Lett. 1994, 15, 125–133. [Google Scholar] [CrossRef]
- Siripen, W. A multi-objective genetic algorithm with fuzzy c-means for automatic data clustering. Appl. Soft Comput. 2014, 24, 679–691. [Google Scholar]
- Das, S.; Abraham, A.; Konar, A. Automatic clustering using an improved differential evolution algorithm. IEEE Trans. Syst. Man. Cybern. 2008, 38, 218–237. [Google Scholar] [CrossRef]
- Ilker, O.; Lee, H.M.; Sullivan, M.R.; Wang, S.S. Identification and clustering of event patterns from in vivo multiphoton optical recordings of neuronal ensembles. J. Neurophysiol. 2008, 100, 495–503. [Google Scholar]
- Masoud, Y.; Nasim, G. GeneticTKM: A hybrid clustering method based on genetic algorithm, tabu search and k-means. Int. J. Appl. Metaheuristic Comput. 2013, 4, 67–77. [Google Scholar]
- Gowri, R.; Rathipriya, R. Protein motif comparator using PSO k-means. Int. J. Appl. Metaheuristic Comput. 2016, 7, 56–68. [Google Scholar]
- Haider, A. K-Medoids based clustering of PlanetLab's slice-centric data. Appl. Math. Inf. Sci. 2013, 7, 2372–2384. [Google Scholar] [CrossRef]
- Wang, J.; Chung, F.L.; Wang, S.T.; Deng, Z.H. Double indices-induced FCM clustering and its integration with fuzzy subspace clustering. Pattern Anal. Appl. 2014, 17, 549–566. [Google Scholar] [CrossRef]
- Baraldi, P.; Francesco, D.M.; Rigamonti, M.; Zio, E.; Seraoui, R. Clustering for unsupervised fault diagnosis in nuclear turbine shut-down transients. Mech. Syst. Signal Process. 2015, 58, 160–178. [Google Scholar] [CrossRef]
- Zhang, J.H.; Peng, X.D.; Liu, H.; Raisch, J.; Wang, R.B. Classifying human operator functional state based on electrophysiological and performance measures and fuzzy clustering method. Cogn. Neurodynamics 2013, 7, 477–494. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.C.; Zhang, D.Q. Robust image segmentation using FCM with spatial constraints based on new kernel-induced distance measure. IEEE Trans. Syst. Man Cybern. 2004, 34, 1907–1916. [Google Scholar] [CrossRef]
- Stetco, A.; Zeng, X.J.; Keane, J. Fuzzy C-means ++: Fuzzy C-means with effective seeding initialization. Expert Syst. Appl. 2015, 42, 7541–7548. [Google Scholar] [CrossRef]
- Tang, J.J.; Zhang, G.H.; Wang, Y.H.; Wang, H.; Liu, F. A hybrid approach to integrate fuzzy C-means based imputation method with genetic algorithm for missing traffic volume data estimation. Transp. Res. Part C 2015, 51, 29–40. [Google Scholar] [CrossRef]
- Havens, T.C.; Bezdek, J.C.; Leckie, C.; Hall, L.O.; Palaniswami, M. Fuzzy c-means algorithms for very large data. IEEE Trans. Fuzzy Syst. 2012, 20, 1130–1146. [Google Scholar] [CrossRef]
- Parker, J.K.; Hall, L.O. Accelerating fuzzy-c means using an estimated subsample size. IEEE Trans. Fuzzy Syst. 2014, 22, 1229–1244. [Google Scholar] [CrossRef] [PubMed]
- Jin, G.F.; Zhang, W.; Yang, Z.W.; Huang, Z.Y.; Song, Y.J.; Wang, D.D.; Tian, G. Image segmentation of thermal waving inspection based on particle swarm optimization fuzzy clustering algorithm. Meas. Sci. Rev. 2012, 12, 296–301. [Google Scholar]
- Biniaz, A.; Abbasi, A. Unsupervised ACO: Applying FCM as a supervisor for ACO in medical image segmentation. J. Intell. Fuzzy Syst. 2014, 27, 407–417. [Google Scholar]
- Gil, J.M.; Han, Y.H. A target coverage scheduling scheme based on genetic algorithms in directional sensor networks. Sensors 2011, 11, 1888–1906. [Google Scholar] [CrossRef] [PubMed]
- Liang, J.J.; Qin, A.K.; Suganthan, P.N.; Baskar, S. Comprehensive learning particle swarm optimizer for global optimization of multimodal functions. IEEE Trans. Evolut. Comput. 2006, 10, 281–295. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Global Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Day, R.F.; Yin, P.Y.; Wang, Y.C.; Chao, C.H. Hybrid multi-start tabu search for finding hidden decision strategies based on eye-movement data clustering. Appl. Soft Comput. 2016, 48, 217–229. [Google Scholar] [CrossRef]
- Kwedlo, W. A clustering method combining differential evolution with the K-means algorithm. Pattern Recogn. Lett. 2011, 32, 1613–1621. [Google Scholar] [CrossRef]
- Wang, X.; Wang, S.; Ma, J.J. An improved co-evolutionary particle swarm optimization for wireless sensor networks with dynamic deployment. Sensors 2007, 7, 354–370. [Google Scholar] [CrossRef]
- Alavi, S.M.; Naini, A.F. A comparison between GA, PSO, and IWO for shaped beam reflector antennas. Int. J. Microw. Wirel. Technol. 2015, 7, 565–570. [Google Scholar] [CrossRef]
- Mao, L.; Mao, Y.; Zhou, C.; Li, C.; Wei, X.; Yang, H. Particle swarm and bacterial foraging inspired hybrid artificial bee colony algorithm for numerical function optimization. Math. Probl. Eng. 2016. [Google Scholar] [CrossRef]
- Luan, X.Y.; Li, Z.P.; Liu, T.Z. A novel attribute reduction algorithm based on rough set and improved artificial fish swarm algorithm. Neurocomputing 2016, 174, 522–529. [Google Scholar] [CrossRef]
- Liu, L.L.; Hu, R.S.; Hu, X.P.; Zhao, G.P.; Wang, S. A hybrid PSO-GA algorithm for job shop scheduling in machine tool production. Int. J. Prod. Res. 2015, 53, 5755–5781. [Google Scholar] [CrossRef]
- Lavanya, G.; Srinivasan, S. Application of fractional order ABC and GA for neural network training and clustering process. Int. J. Comput. Intell. Syst. 2015, 8, 900–913. [Google Scholar] [CrossRef]
- Sheikhan, M.; Mohammadi, N. Neural-based electricity load forecasting using hybrid of GA and ACO for feature selection. Neural Comput. Appl. 2012, 21, 1961–1970. [Google Scholar] [CrossRef]
- Pan, W.T. A new fruit fly optimization algorithm: Taking the financial distress model as an example. Knowledge-Based Syst. 2012, 26, 69–74. [Google Scholar] [CrossRef]
- Li, H.Z.; Guo, S.; Li, C.J.; Sun, J.Q. A hybrid annual power load forecasting model based on generalized regression neural network with fruit fly optimization algorithm. Knowledge-Based Syst. 2013, 37, 378–387. [Google Scholar] [CrossRef]
- Li, H.Z.; Guo, S.; Zhao, H.R.; Su, C.B.; Wang, B. Annual electric load forecasting by a least squares support vector machine with a fruit fly optimization algorithm. Energies 2012, 11, 4430–4445. [Google Scholar] [CrossRef]
- Zheng, X.L.; Wang, L.; Wang, S.Y. A novel fruit fly optimization algorithm for the semiconductor final testing scheduling problem. Knowledge-Based Syst. 2014, 57, 95–103. [Google Scholar] [CrossRef]
- Shan, D.; Cao, G.H.; Dong, H.J. LGMS-FOA: An improved fruit fly optimization algorithm for solving optimization problems. Math. Probl. Eng. 2013. [Google Scholar] [CrossRef]
- Wang, L.; Shi, Y.L.; Liu, S. An improved fruit fly optimization algorithm and its application to joint replenishment problems. Expert Syst. Appl. 2015, 42, 4310–4323. [Google Scholar] [CrossRef]
- Ramachandran, B.; Bellarmine, G.T. Improving observability using optimal placement of phasor measurement units. Int. J. Elec. Power 2014, 56, 55–63. [Google Scholar] [CrossRef]
- Pan, Q.K.; Sang, H.Y.; Duan, J.H.; Gao, L. An improved fruit fly optimization algorithm for continuous function optimization problems. Knowledge-Based Syst. 2014, 62, 69–83. [Google Scholar] [CrossRef]
- Gao, L.X.; Yang, Z.J.; Cai, L.G.; Wang, H.Q.; Chen, P. Roller bearing fault diagnosis based on nonlinear redundant lifting wavelet packet analysis. Sensors 2011, 11, 260–277. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.H.; Schlindwein, F.S. Normalized wavelet packets quantifiers for condition monitoring. Mech. Syst. Signal Pr. 2009, 23, 712–723. [Google Scholar] [CrossRef]
- Lei, H.X.; Liu, N.; Cui, D.J.; Ma, T.J.; Xu, H.B. Transformer fault diagnosis based on optimized FCM clustering by hybrid GA and PSO. Power Syst. Protect. Control 2011, 39, 52–56. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating System | Windows 10 (64 bits) |
|---|---|
| CPU | Intel Xeon E5-2690 (8 cores, 2.9 GHz) |
| Memory | 16 GB (DDR3) |
| Hard disk space | SSD (512GB) |
| Matlab version ( MathWorks Inc., Na tick, MD, USA, 2012) | 8.0 |
| Number | Feature Vector |
|---|---|
| 1 | [0.767079, 0.01970, 0.000509, 0.002197, 0.002056, 0.002177, 0.000075, 0.001561, 0.000001, 0.000006, 0.000021, 0.000020, 0.001224, 0.001112, 0.000045, 0.000417] |
| 2 | [0.771856, 0.176547, 0.013883, 0.174835, 0.002439, 0.00517, 0.003403, 0.008946, 0.000030, 0.000150, 0.000295, 0.000244, 0.001405, 0.001727, 0.000374, 0.000991] |
| 3 | [0.744010, 0.118100, 0.067296, 0.063892, 0.031492, 0.002508, 0.055797, 0.008220, 0.000003, 0.000004, 0.000282, 0.000024, 0.000880, 0.000462, 0.000360, 0.000263] |
| 4 | [0.804032, 0.006559, 0.000681, 0.002085, 0.000015, 0.000053, 0.000241, 0.000120, 0.000001, 0.000006, 0.000011, 0.000009, 0.000011, 0.000015, 0.000011, 0.000013] |
| … | |
| 399 | [0.734019, 0.097592, 0.073854, 0.101107, 0.020851, 0.003079, 0.0601384, 0.009932, 0.000002, 0.000006, 0.000730, 0.000009, 0.002013, 0.000099, 0.000670, 0.000155] |
| 400 | [0.699824, 0.012047, 0.000935, 0.002409, 0.000031, 0.000019, 0.000310, 0.000119, 0.000003, 0.000011, 0.000017, 0.000004, 0.000009, 0.000037, 0.000007, 0.000022] |
| Genetic Proportion | Fitness Value | Convergence Time (s) |
|---|---|---|
| 0 | 0.509624 | 2.173550 |
| 0.1 | 0.600524 | 2.960945 |
| 0.2 | 0.421024 | 3.581077 |
| 0.3 | 0.643496 | 4.433216 |
| 0.4 | 0.643496 | 5.698395 |
| 0.5 | 0.643496 | 9.298510 |
| 0.6 | 0.643496 | 8.314697 |
| 0.7 | 0.643496 | 10.441968 |
| 0.8 | 0.643496 | 17.276850 |
| 0.9 | 0.643496 | 15.218627 |
| 1.0 | 0.643496 | 21.970014 |
| Compared Methods | Convergence Time (s) | Recognition Accuracy |
|---|---|---|
| γ-ray detection | 32.776031 | 44% |
| Vibration analysis | 18.764410 | 57% |
| FCM a | 17.007964 | 64% |
| PSO-FCM b | 3.896237 | 82% |
| ACO-FCM c | 5.674583 | 79% |
| PSGOA-FCM d | 6.963550 | 92% |
| The proposed method | 4.433216 | 95% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Wang, Z.; Wang, J.; Tan, C.; Zhang, L.; Liu, X. Acoustic-Based Cutting Pattern Recognition for Shearer through Fuzzy C-Means and a Hybrid Optimization Algorithm. Appl. Sci. 2016, 6, 294. https://doi.org/10.3390/app6100294
Xu J, Wang Z, Wang J, Tan C, Zhang L, Liu X. Acoustic-Based Cutting Pattern Recognition for Shearer through Fuzzy C-Means and a Hybrid Optimization Algorithm. Applied Sciences. 2016; 6(10):294. https://doi.org/10.3390/app6100294
Chicago/Turabian StyleXu, Jing, Zhongbin Wang, Jiabiao Wang, Chao Tan, Lin Zhang, and Xinhua Liu. 2016. "Acoustic-Based Cutting Pattern Recognition for Shearer through Fuzzy C-Means and a Hybrid Optimization Algorithm" Applied Sciences 6, no. 10: 294. https://doi.org/10.3390/app6100294