
Identification of the Response of a Controlled Building Structure Subjected to Seismic Load by Using Nonlinear System Models

Abstract
:1. Introduction
2. System Identification Methods
2.1. Nonlinear ARX
2.2. Adaptive Neuro-Fuzzy Inference System
2.3. Performance Evaluation of Models
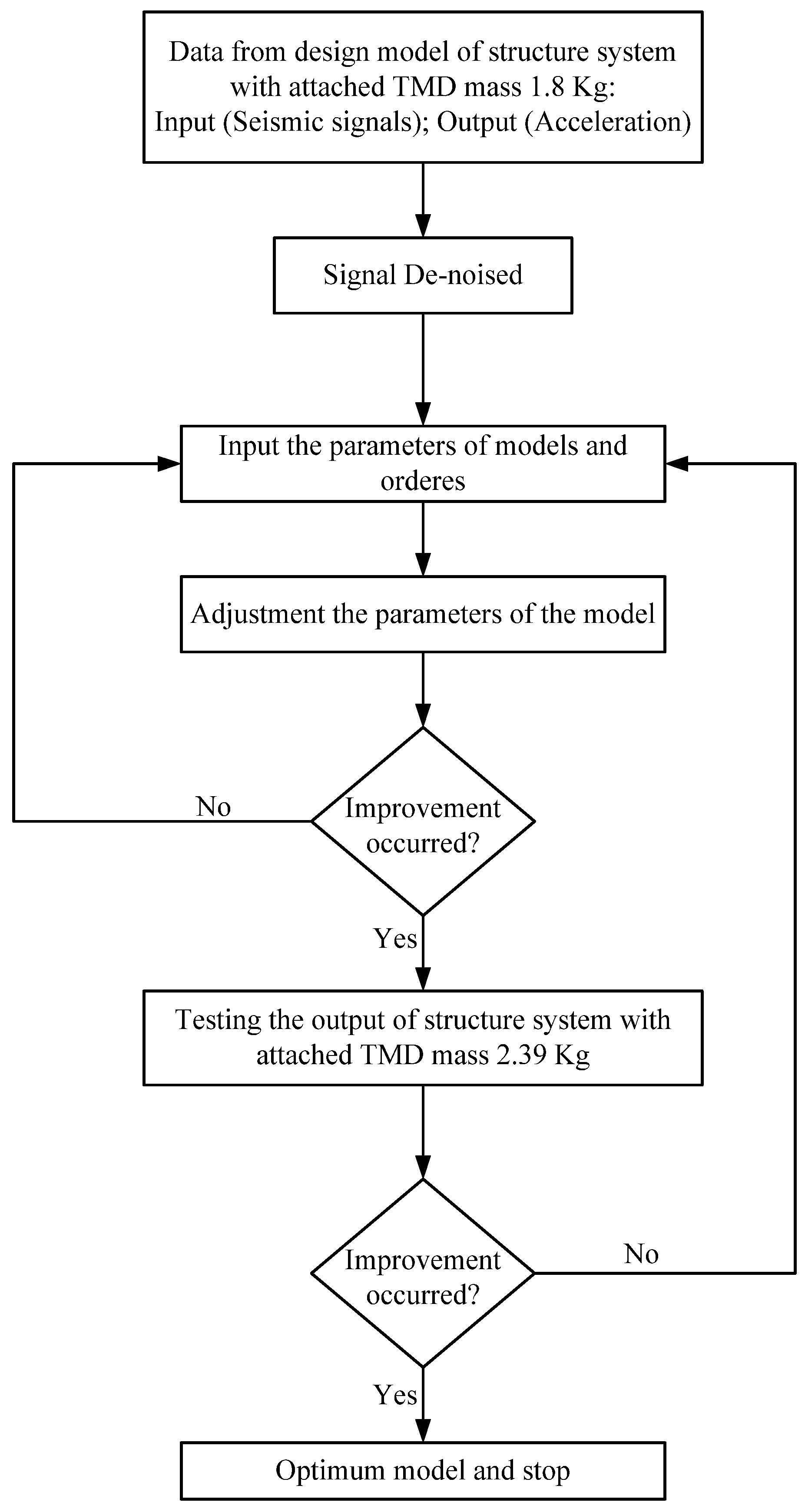
2.4. The Strategy of the Identification Models
3. Controller System Design
4. Results and Discussions
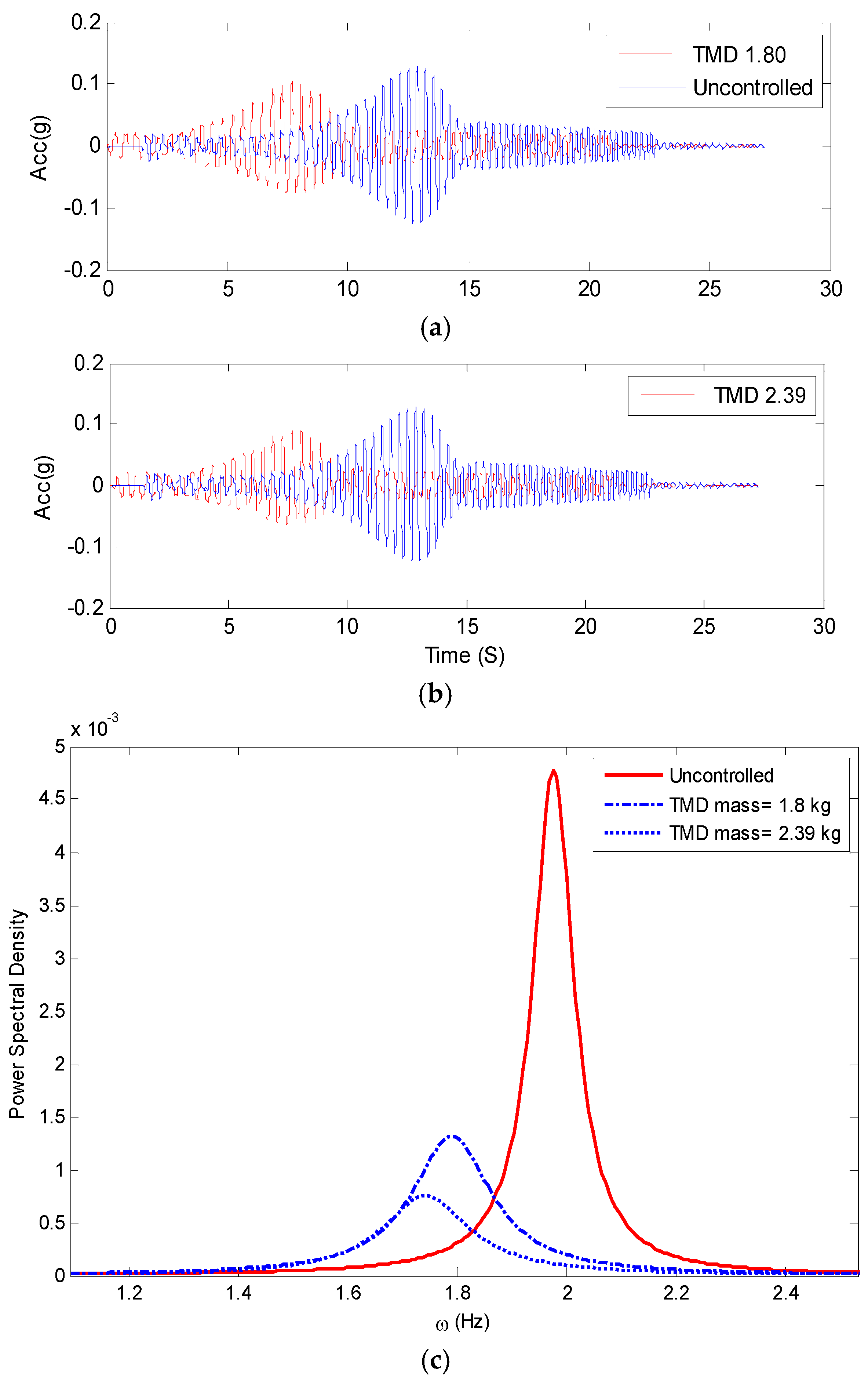
4.1. Controller System Behavior Analysis
4.2. System Identification Analysis
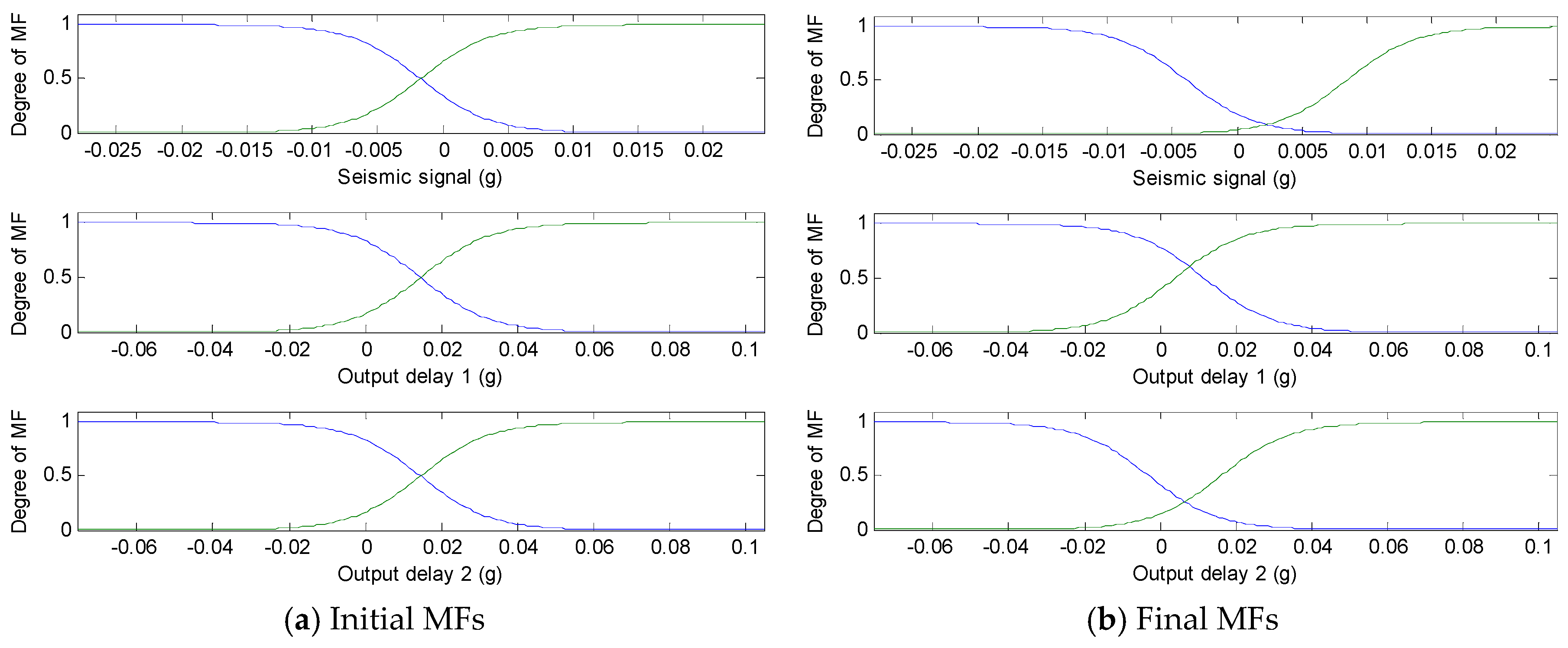
4.2.1. Training Setting Evaluation
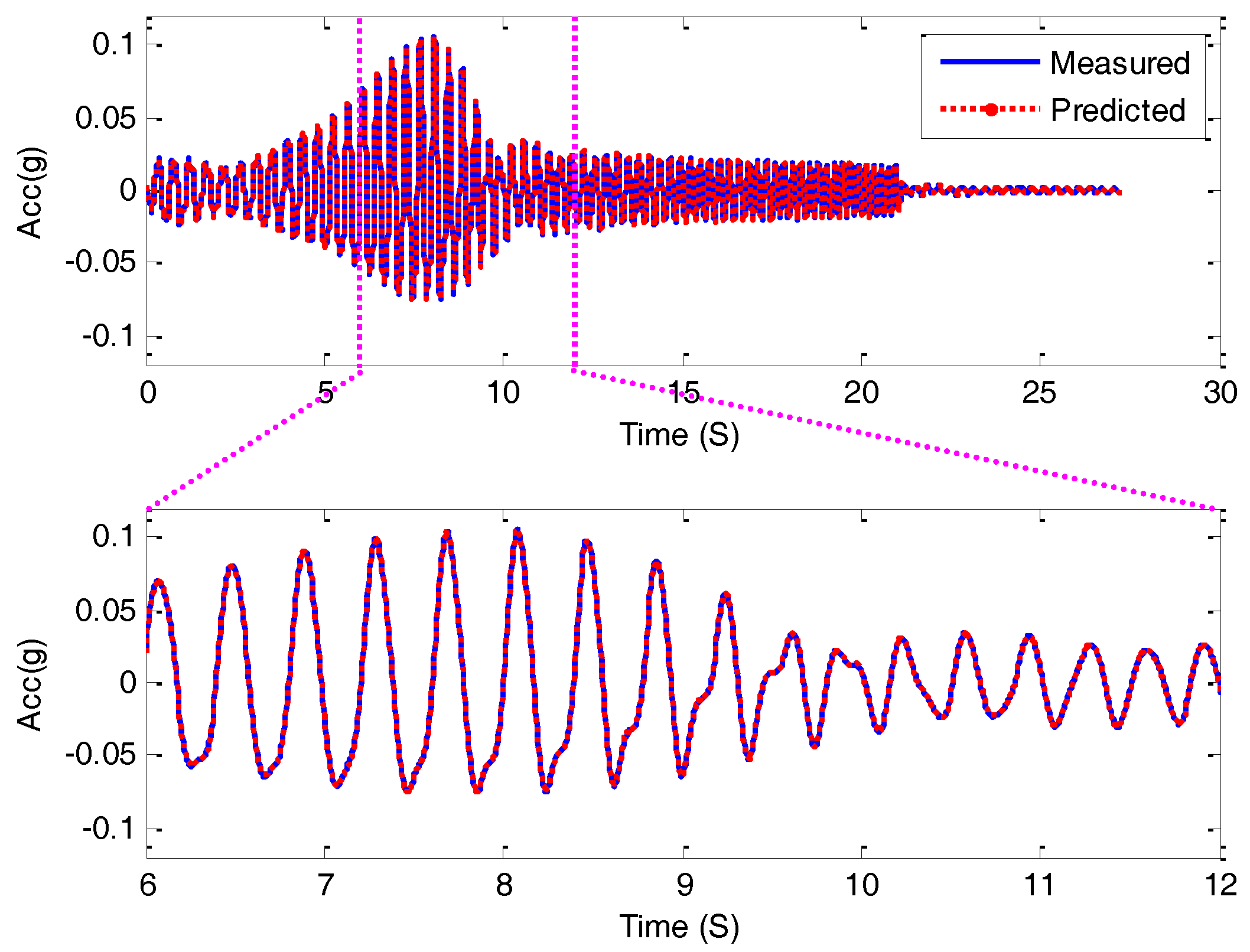
4.2.2. Testing Setting Evaluation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Arsava, K.S.; Kim, Y.; El-Korchi, T.; Park, H.S. Nonlinear system identification of smart structures under high impact loads. Smart Mater. Struct. 2013, 22, 055008. [Google Scholar] [CrossRef]
- Mitchell, R. A WANFIS Model for Use in System Identification and Structural Control of Civil Engineering Structures; Worcester Poytechnic Institute: Worcester, MA, USA, 2012. [Google Scholar]
- Mitchell, R.; Kim, Y.; El-Korchi, T. System identification of smart structures using a wavelet neuro-fuzzy model. Smart Mater. Struct. 2012, 21, 115009. [Google Scholar] [CrossRef]
- Seo, J.; Hu, J.W. Seismic Response and Performance Evaluation of Self-Centering LRB Isolators Installed on the CBF Building under NF Ground Motions. Sustainability 2016, 8, 109. [Google Scholar] [CrossRef]
- Bigdeli, Y.; Kim, D. Damping effects of the passive control devices on structural vibration control: TMD, TLC and TLCD for varying total masses. KSCE J. Civ. Eng. 2016, 20, 301–308. [Google Scholar] [CrossRef]
- Bigdeli, Y.; Kim, D.; Chang, S. Vibration control of 3D irregular buildings by using developed neuro-controller strategy. Struct. Eng. Mech. 2014, 49, 687–703. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Hu, J.W. Damage Identification and Performance Assessment of Regular and Irregular Buildings Using Wavelet Transform Energy. Adv. Mater. Sci. Eng. 2016, 2016, 6027812. [Google Scholar] [CrossRef]
- Ponzo, F.C.; Di Cesare, A.; Nigro, D.; Vulcano, A.; Mazza, F.; Dolce, M.; Moroni, C. JET-PACS project: Dynamic experimental tests and numerical results obtained for a steel frame equipped with hysteretic damped chevron braces. J. Earthq. Eng. 2012, 16, 662–685. [Google Scholar] [CrossRef]
- Mazza, F. Comparative study of the seismic response of RC framed buildings retrofitted using modern techniques. Earthq. Struct. 2015, 9, 29–48. [Google Scholar] [CrossRef]
- Kim, D.; Hassan, M.K.; Chang, S.; Bigdeli, Y. Nonlinear Vibration Control of 3D Irregular Structures Subjected to Seismic Loads. In Handbook of Research on Advanced Computational Techniques for Simulation-Based Engineering, No. November; Samui, P., Ed.; IGI Global: Hershey, PA, USA, 2015; pp. 103–119. [Google Scholar]
- Arsava, K.S.; Kim, Y.; Kim, K.H.; Shin, B.S. Smart fuzzy control of reinforced concrete structures excited by collision-type forces. Expert Syst. Appl. 2015, 42, 7929–7941. [Google Scholar] [CrossRef]
- Kaloop, M.; Hu, J.; Sayed, M. Bridge Performance Assessment Based on an Adaptive Neuro-Fuzzy Inference System with Wavelet Filter for the GPS Measurements. ISPRS Int. J. Geo-Inform. 2015, 4, 2339–2361. [Google Scholar] [CrossRef]
- Doebling, S.W.S.; Farrar, C.R.C.; Prime, M.B.M.; Shevitz, D.W.D. Damage Identification and Health Monitoring of Structural and Mechanical Systems from Changes in Their Vibration Characteristics: A Literature Review; Los Alamos National Lab.: Los Alamos, NM, USA, 1996.
- Sirca, G.F.; Adeli, H. System identification in structural engineering. Sci. Iran. 2012, 19, 1355–1364. [Google Scholar] [CrossRef]
- Elnabwy, M.T.; Kaloop, M.R.; Elbeltagi, E. Talkha steel highway bridge monitoring and movement identification using RTK-GPS technique. Measurement 2013, 46, 4282–4292. [Google Scholar] [CrossRef]
- Taguchi, S.; Suzuki, T.; Hayakawa, S.; Inagaki, S. Identification of probability weighted multiple ARX models and its application to behavior analysis. In Proceedings of the IEEE Conference on Decision and Control, Shanghai, China, 15–18 December 2009; pp. 3952–3957.
- Fasel, T.R.; Sohn, H.; Park, G.; Farrar, C.R. Active sensing using impedance-based ARX models and extreme value statistics for damage detection. Earthq. Eng. Struct. Dyn. 2005, 34, 763–785. [Google Scholar] [CrossRef]
- Radmaneshfar, E.; Karrari, M. A new method for structure detection of nonlinear ARX model: ANOVA_BSD. World Congr. Eng. 2007, 2165, 407–411. [Google Scholar]
- Hu, B.; Zhao, Z.; Liang, J. Multi-loop nonlinear internal model controller design under nonlinear dynamic PLS framework using ARX-neural network model. J. Proc. Contr. 2012, 22, 207–217. [Google Scholar] [CrossRef]
- Zhang, Q.; Ljung, L. Multiple steps prediction with nonlinear ARX models. In Proceedings of the 6th IFAC Symposium on Nonlinear Control Systems, Stuttgart, Germany, 1–3 September 2004; pp. 309–314.
- Zhu, Y. Estimation of Nonlinear ARX Models. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; pp. 2214–2219.
- Peng, H.; Ozaki, T.; Haggan-Ozaki, V.; Toyoda, Y. A nonlinear exponential ARX model-based multivariable generalized predictive control strategy for thermal power plants. IEEE Trans. Control Syst. Technol. 2002, 10, 256–262. [Google Scholar] [CrossRef]
- Jang, J.S.R. ANFIS: Adaptive-Network-Based Fuzzy Inference System. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Eldessouki, M.; Hassan, M. Adaptive neuro-fuzzy system for quantitative evaluation of woven fabrics’ pilling resistance. Expert Syst. Appl. 2015, 42, 2098–2113. [Google Scholar] [CrossRef]
- Kisi, O.; Shiri, J. Prediction of long-term monthly air temperature using geographical inputs. Int. J. Climatol. 2014, 34, 179–186. [Google Scholar] [CrossRef]
- Guyan, R.J. Reduction of stiffness and mass matrices. AIAA J. 1965, 3, 380–380. [Google Scholar] [CrossRef]
- Takhirov, S.M.; Fenves, G.L.; Fujisaki, E.; Clyde, D. Ground Motions for Earthquake Simulator Qualification of Electrical Substation Equipment; Peer Report 2004/7; Pacific Earthquake Engineering Research Center: Berkeley, CA, USA, 2005. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance | |
|---|---|
| Peak Force (N) | 375.0 |
| Continuous Force (N) | 84.1 |
| Peak Power (W) | 2261 |
| Continuous Power (W) | 113 |
| Table travel (cm) | ±12.0 |
| Table Operational Bandwidth (Hz) | 20 |
| Table Peak Acceleration (g) | 2.0 |
| Model No. | Model | Order and Function | R2 | MAE (g) | RMSE (g) |
|---|---|---|---|---|---|
| Model 1 | NARX(1) | [(5)(3)(1)]-sigmoid | 0.33 | 0.047 | 0.057 |
| Model 2 | NARX(1) | [(5)(3)(1)]-wavelet | 0.18 | 0.025 | 0.042 |
| Model 3 | NARX(2) | [(2) (2 1) (0 1)]-sigmoid | 0.99 | 2.97 × 10−4 | 4.35 × 10−4 |
| Model 4 | NARX(2) | [(2) (2 1) (0 1)]-wavelet | 0.99 | 2.80 × 10−4 | 4.27 × 10−4 |
| Model 5 | NARX(2) | [(2) (2 1) (0 0)]-sigmoid | 0.99 | 2.95 × 10−4 | 4.26 × 10−4 |
| Model 6 | NARX(3) | [(2) (2 2 1) (0 0 1)]-sigmoid | 0.99 | 1.48 × 10−4 | 2.41× 10−4 |
| Model 7 | NARX(3) | [(2) (2 2 1) (0 0 1)]-wavelet | 0.99 | 5.54 × 10−4 | 6.90 × 10−4 |
| Model 8 | NARX(3) | [(2) (2 2 1) (0 0 0)]-sigmoid | 0.99 | 1.26 × 10−4 | 1.88 × 10−4 |
| Model 9 | NARX(3) | [(2) (2 2 1) (0 0 0)]-wavelet | 0.99 | 4.96 × 10−4 | 6.09 × 10−4 |
| MF No. | R2 | MAE (g) | RMSE (g) | MF types | R2 | MAE (g) | RMSE (g) |
|---|---|---|---|---|---|---|---|
| 2 | 0.97 | 5.58 × 10−3 | 7.78 × 10−3 | Gaussian | 0.93 | 8.51 × 10−3 | 0.012 |
| 3 | −0.59 | 0.045 | 0.118 | trapezoidal | 0.79 | 7.74 × 10−3 | 0.016 |
| 4 | −0.54 | 0.071 | 0.359 | triangle | 0.84 | 0.014 | 0.030 |
| 6 | −0.63 | 0.049 | 0.109 | sigmoid | 0.97 | 5.58 × 10−3 | 7.78 × 10−3 |
| Model | R2 | MAE (g) | RMSE (g) |
|---|---|---|---|
| Model 1 | 0.38 | 0.016 | 0.023 |
| Model 2 | 0.13 | 0.018 | 0.032 |
| Model 3 | 0.97 | 5.58 × 10−3 | 7.78 × 10−3 |
| Model | R2 | MAE (g) | RMSE (g) |
|---|---|---|---|
| Model 8-NARX | 0.98 | 2.55 × 10−3 | 3.68 × 10−3 |
| Model 3- ANFIS | 0.96 | 4.79 × 10−3 | 6.78 × 10−3 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaloop, M.R.; Hu, J.W.; Bigdeli, Y. Identification of the Response of a Controlled Building Structure Subjected to Seismic Load by Using Nonlinear System Models. Appl. Sci. 2016, 6, 301. https://doi.org/10.3390/app6100301
Kaloop MR, Hu JW, Bigdeli Y. Identification of the Response of a Controlled Building Structure Subjected to Seismic Load by Using Nonlinear System Models. Applied Sciences. 2016; 6(10):301. https://doi.org/10.3390/app6100301
Chicago/Turabian StyleKaloop, Mosbeh R., Jong Wan Hu, and Yasser Bigdeli. 2016. "Identification of the Response of a Controlled Building Structure Subjected to Seismic Load by Using Nonlinear System Models" Applied Sciences 6, no. 10: 301. https://doi.org/10.3390/app6100301