1. Introduction
Rotating machinery has been widely used in transmission machinery, and its running state directly affects the entire machine, including reliability and stability. Thus, the fault diagnosis of the rotating machinery is increasingly having attention paid. Over the past several decades, new fault detection methods [
1,
2,
3,
4,
5,
6,
7] and new criteria [
8,
9,
10] were proposed, which greatly enriched the field of fault diagnosis. He et al. [
11] proposed a data mining-based diagnostic system using acoustic emission (AE) signals to detect faults in full ceramic bearings. They further developed a series of methods to identify faults in plastic bearings [
12], gearbox tooth cut faults [
13], planetary gearbox faults [
14], etc.
For the fault detection of the shaft, various researchers have reported feasible methods. Mohammed et al. [
15] investigated a novel route using artificial neural networks (ANN) and power spectral density (PSD) to detect the cracks in a rotating shaft. As is well known, intelligent methods play an important role in detecting faults in mechanical components, such as genetic algorithms (GAs), neural networks (NNs), support vector machine (SVM), etc., and those approaches have been applied to detect faults using experimental samples of all kinds of faults [
7]. However, for the lack of suitable training samples that represent every possible fault in all kinds of practical mechanical systems, the above intelligent techniques have not been agreeable applied to detect faults in mechanical systems.
In order to understand the fault effects in depth, many researchers proposed numerical simulation for fault diagnosis. Torkaman et al. [
16] adopted the three-dimensional time-step finite element method (3D-TSFEM) to simulate the fault of a switched reluctance motor (SRM), and the new diagnosis index associated with power losses was obtained in their results. To detect faults online in nonlinear continuous systems, Bregon et al. [
17] used the simulation and state observer models to obtain the final fault diagnosis results. Gong et al. [
18] investigated rotor dynamic stability analysis on the hydraulic turbine by numerical simulation and also demonstrated how each factor affects the dynamic character of the labyrinth system. Xiang et al. [
19,
20] carried out two kinds of wavelet-based numerical simulation models to calculate the dynamic responses of a shaft. Tannous et al. [
21] performed rotor-stator contact simulations using 3D numerical modeling. Baccarini et al. [
22] proposed a dynamic numerical model to simulate mechanical faults in induction machines, and the simulation results confirmed the validity of the model. For numerical simulation, on the one hand, less time and equipment are used to get a large amount of experimental data, especially for those that are very difficult to conduct in a real machine for carrying out the experimental investigation. On the other hand, this allows the investigator to determine the fault samples for all types of faults under the complex running conditions.
In order to perform the intelligent methods, the selection of feature vectors is one of the key problems. Recently, time domain or time frequency domain feature indexes were adopted to create feature vectors. Chen et al. [
23] proposed an approach that has six indexes (e.g., mean value, root mean square, standard deviation, skewness, kurtosis and shape indicator) in the time domain and two indexes (e.g., mean frequency and standard deviation frequency) in the frequency domain to construct the feature sets to train the SVM. Liu et al. [
24] used a hybrid time frequency analysis method to get the feature information of gear faults.
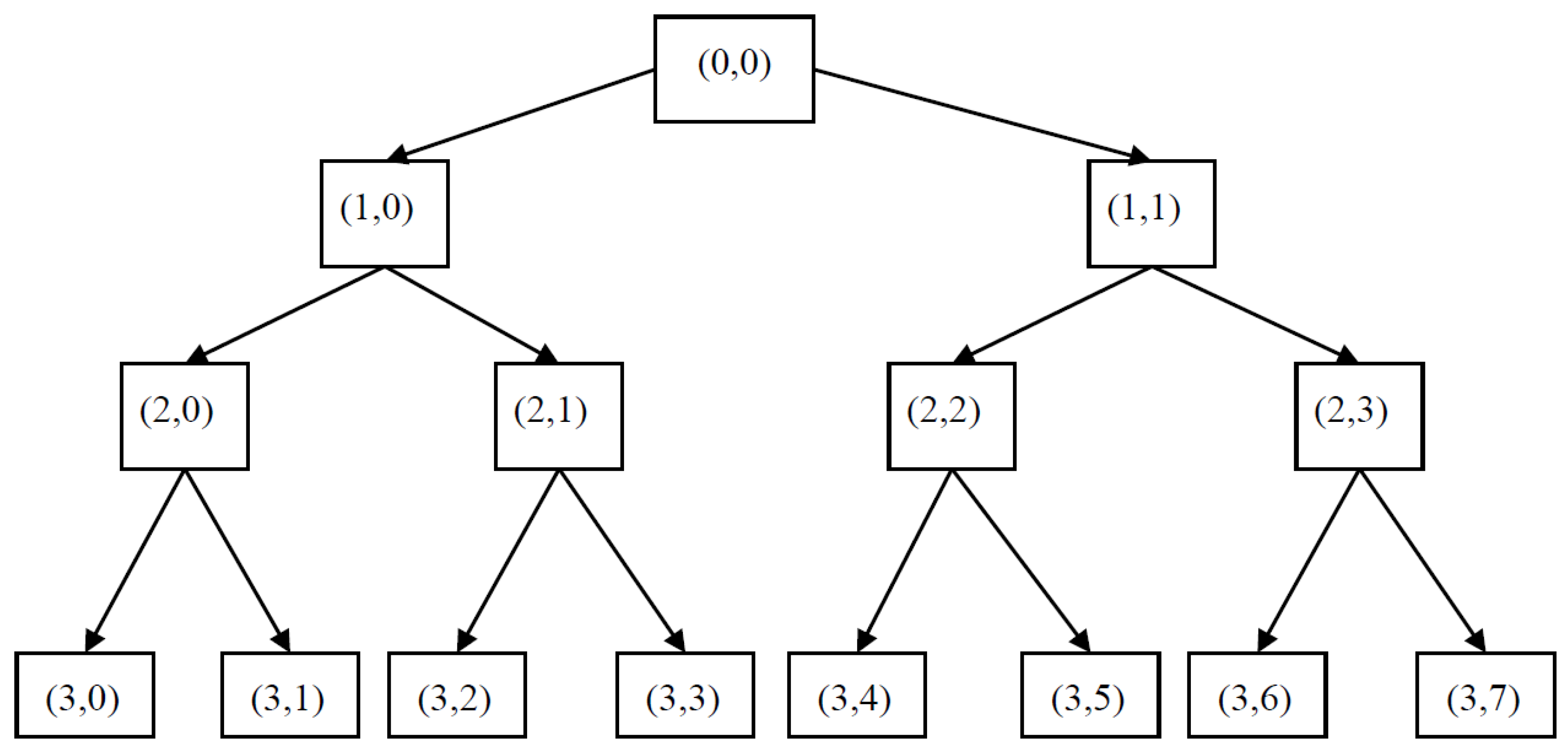
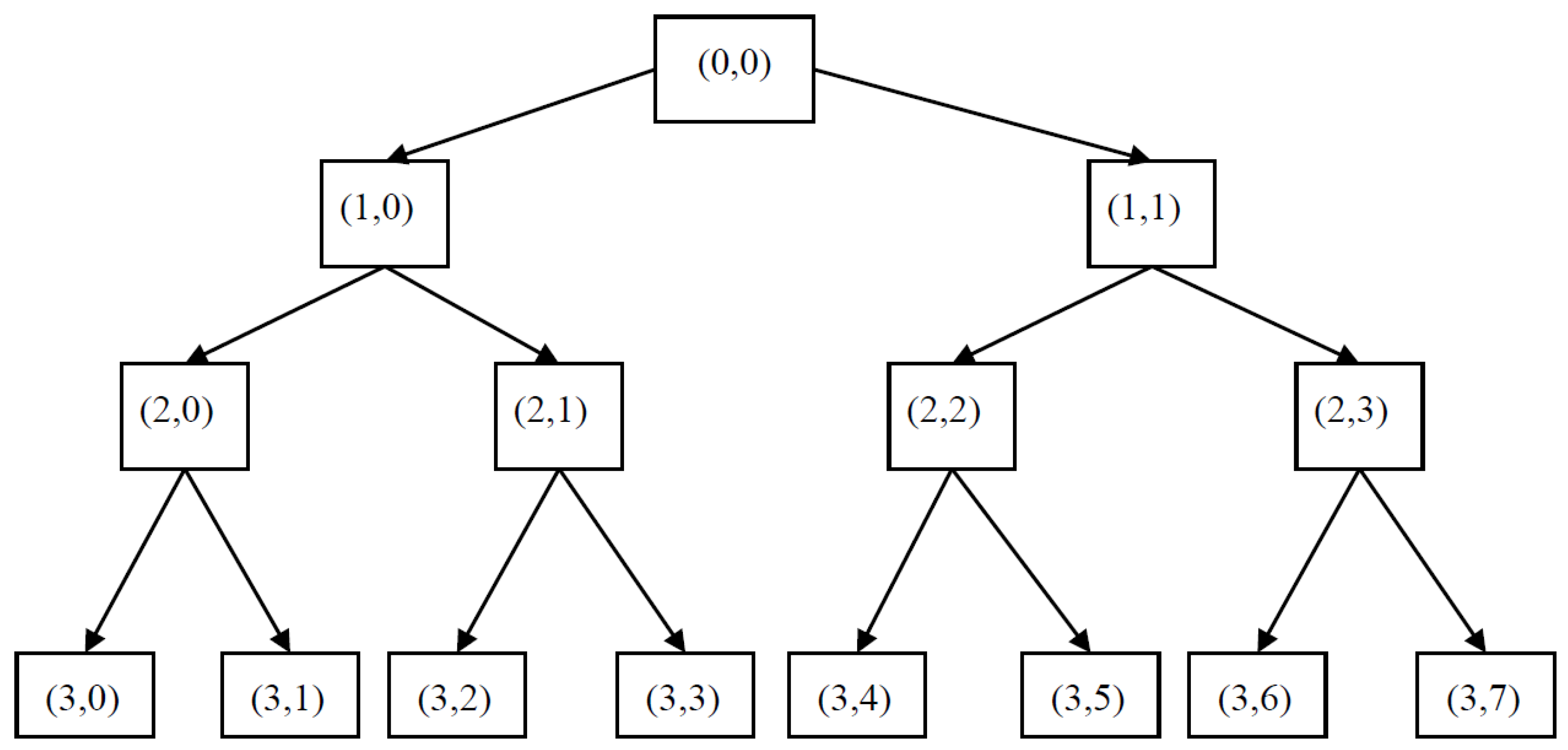
Wavelet packet transform (WPT) is a useful tool in handling non-stationary signals to detect faults in mechanical systems [
25]. As a signal processing tool, WPT decomposes the original signal into multi-layers, and the same frequency bandwidth is offered in each layer. Xiang et al. [
26] propose a new method based on the wavelet transform for the detection of damages in plate-like and shell-like structures. Diego and Barros [
27] employed WPT to analyze the magnitude of the harmonic distortion and the corresponding sub-harmonics in power systems. Pan et al. [
28] proposed a novel approach based on improved WPT and support vector data description (SVDD) to assess bearing performance degradation.
To obtain the features of the ignition pattern, Vong and Wong [
29] used WPT to decompose the engine ignition signal and then employed multi-class least squares SVM to classify the fault types. It is worth pointing out the coefficients of WPT and the corresponding single branch reconstruction signals on all of the decomposing levels, which play a key role in singularity detection and feature extraction.
As a novel pattern recognition approach, support vector machine (SVM), was proposed in the 1990s by Cortes and Vapnik, and now, it has been widely used in fault classification [
30]. The basic theory for SVM is structural risk minimization (SRM) with small training samples, which are suitable for the classification and regression of the nonlinear and high dimensional problems. However, the lack of faulty training samples has greatly limited the fault classification using SVM in real-world applications.
Recently, personalized medicine has become a hot topic to develop a medical procedure that separates patients into different groups, with medical decisions, practices, interventions and/or products being tailored to the individual patient based on his/her predicted response or risk of disease [
31]. It is also a new direction for placing the patient at the center of healthcare, and the theoretical basis is molecular dynamics simulation from person to person [
32]. Motivated by molecular dynamics simulation-based personalized medicine, the fault detection strategy for mechanical systems might be developed for the personalized diagnosis era. The most probable tools might be numerical simulation, the big data technique or a combination of the two.
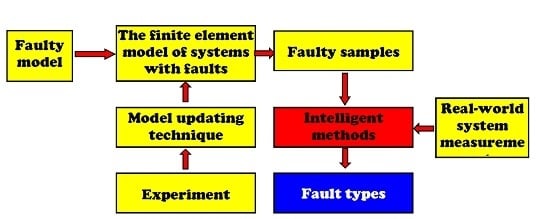
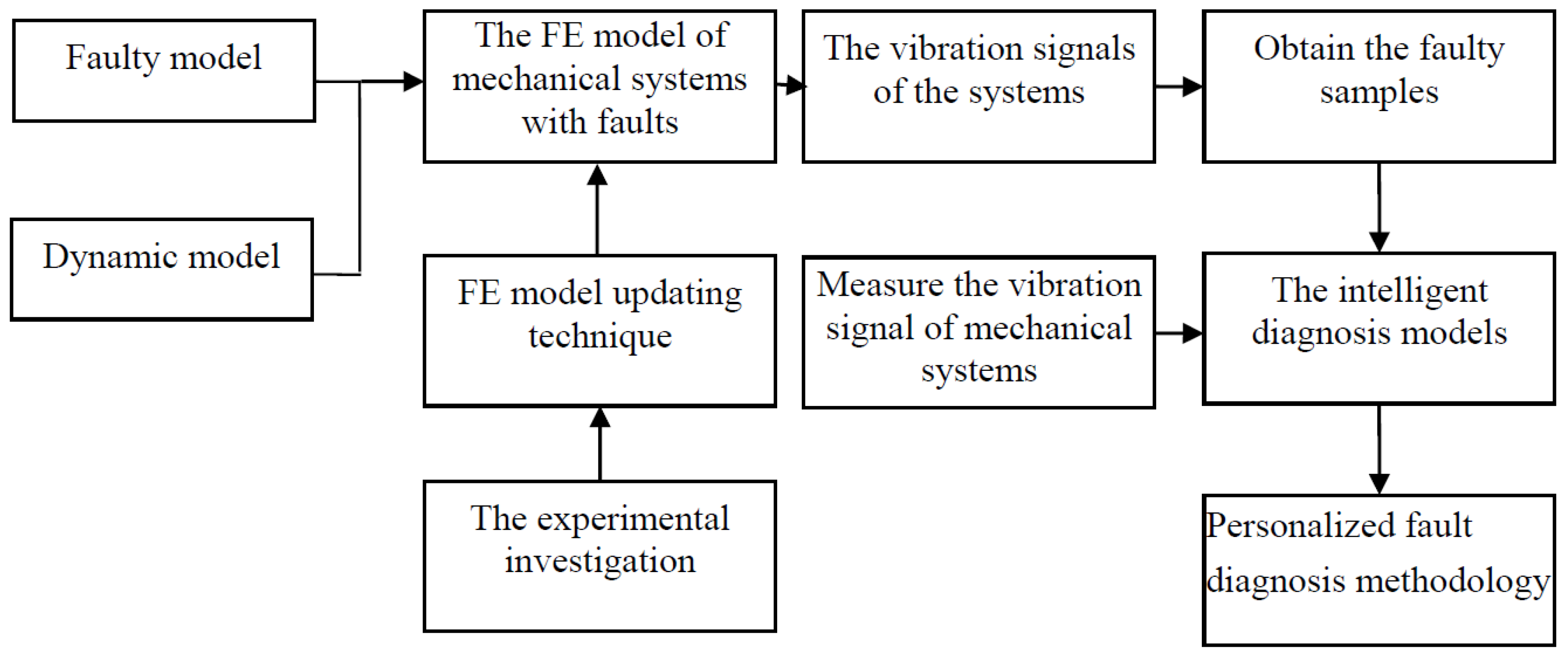
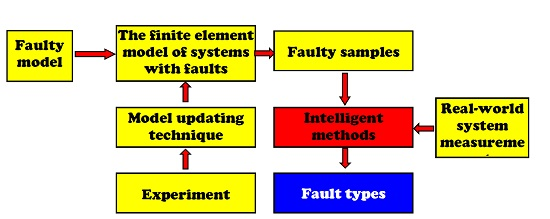
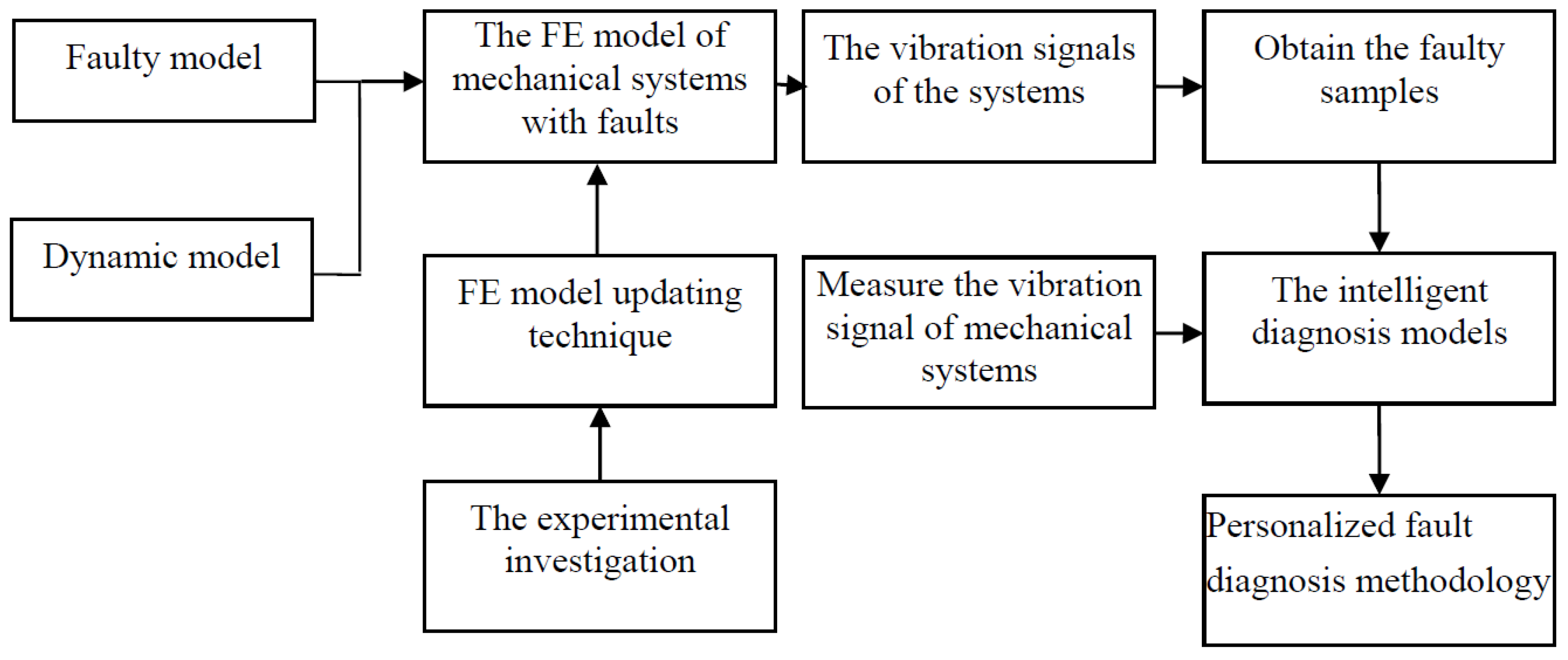
From the above descriptions, it might be concluded that if the limitation of faulty training samples can be inexpensively overcome by numerical simulation using the dynamic model of mechanical systems, the intelligent methods, such as SVM, GAs and NNs, will be directly applied to detect faults for machines under all kinds of working conditions. In this paper, we present the basic idea of a new personalized fault diagnosis methodology focused on the fault diagnosis of shafts. Based on the present methodology, this paper is arranged as follows: The basic idea and the procedures of the personalized diagnosis methodology are presented in
Section 2. In
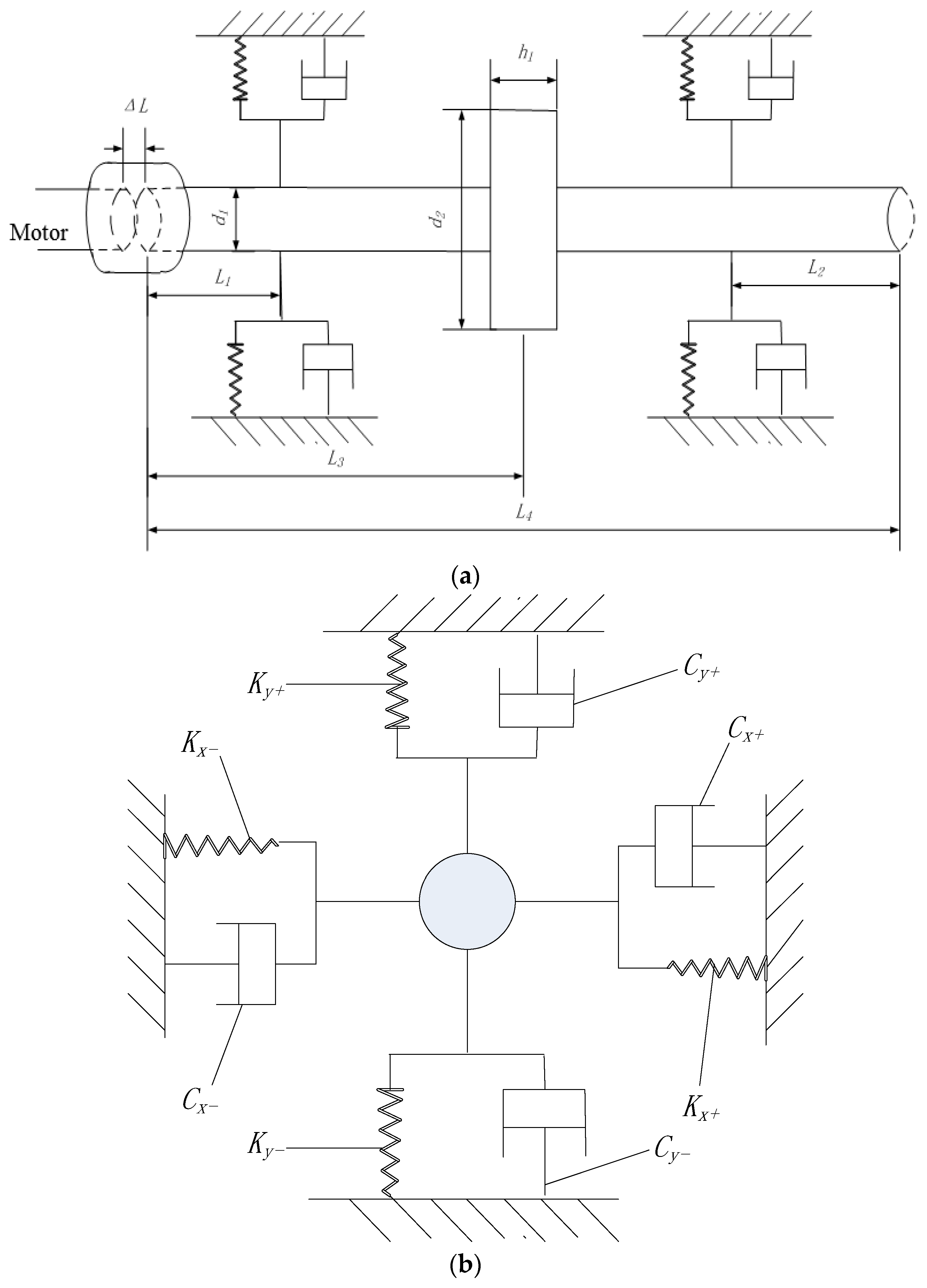
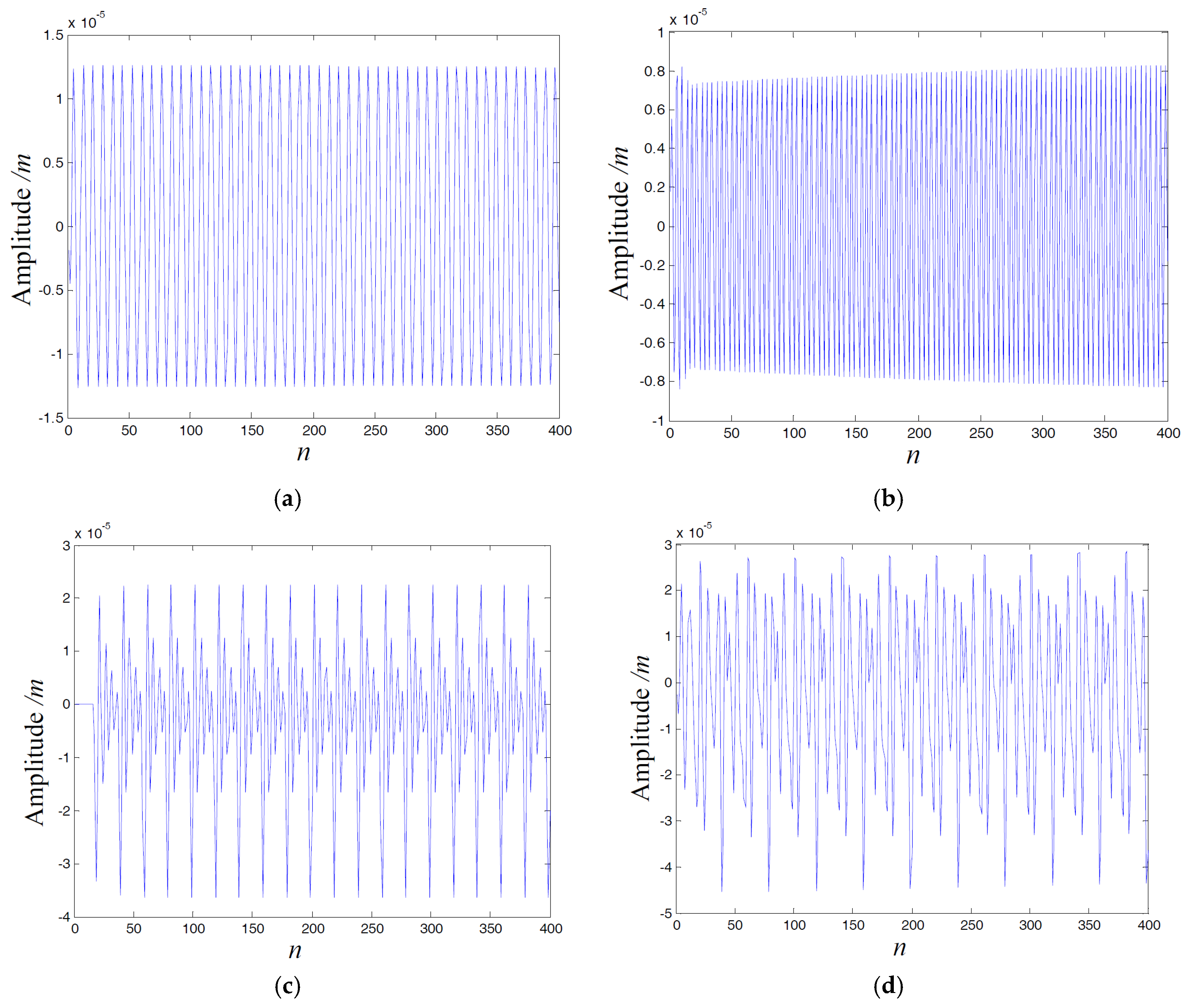
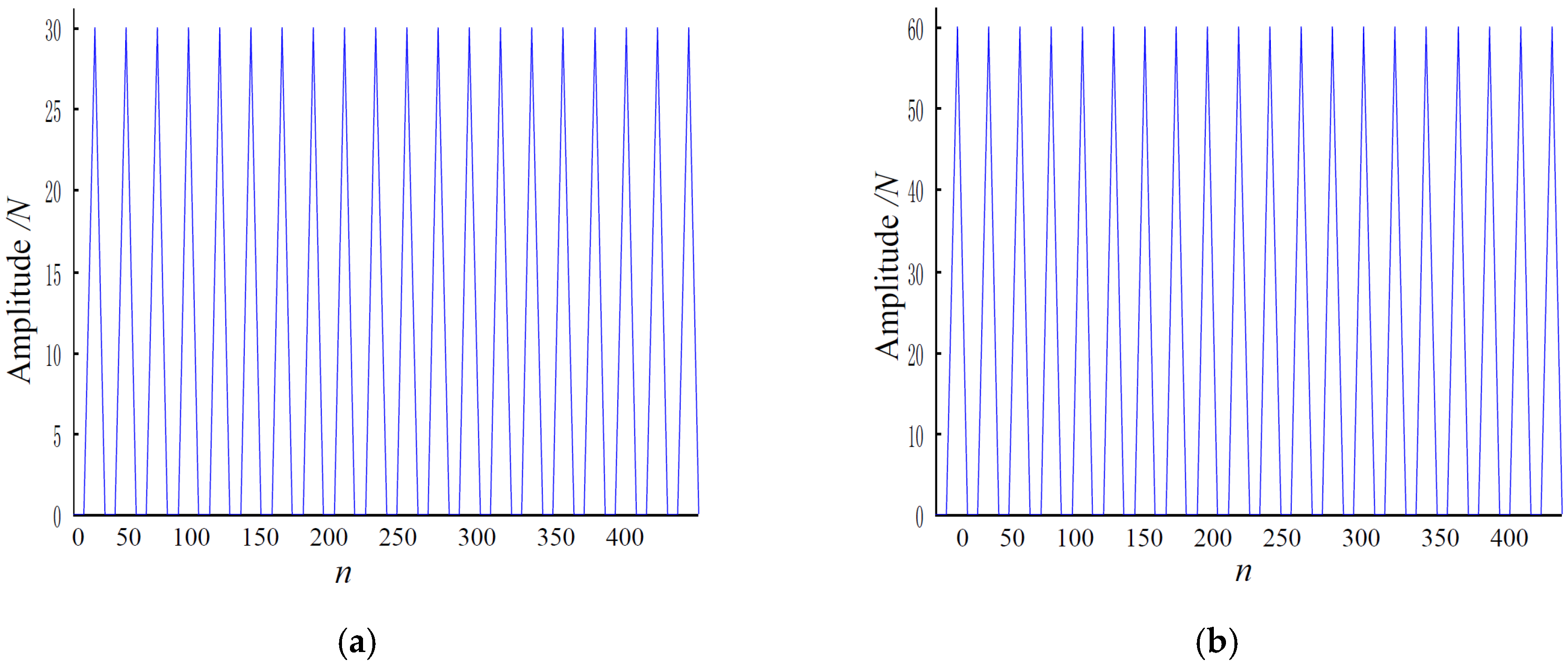
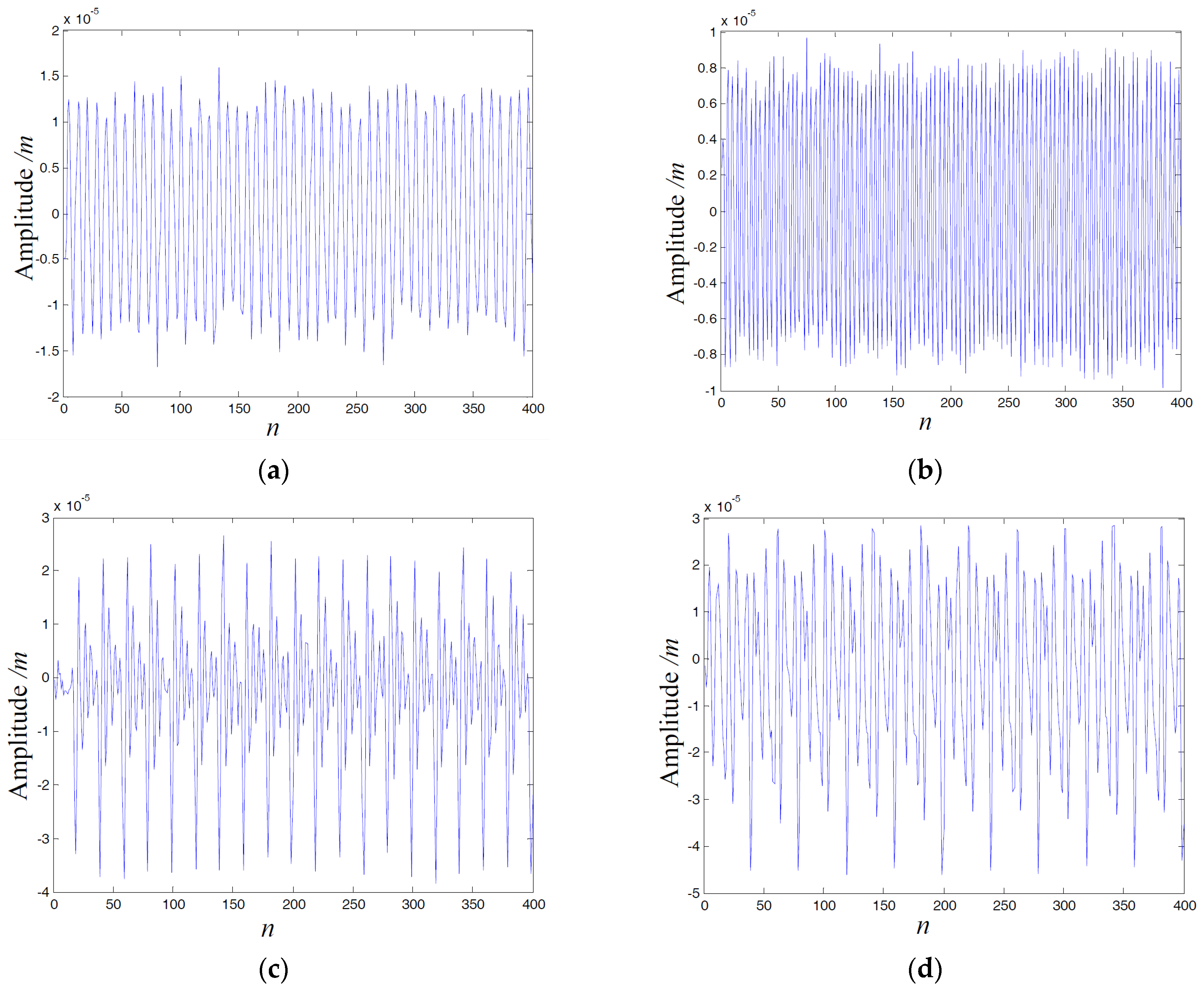
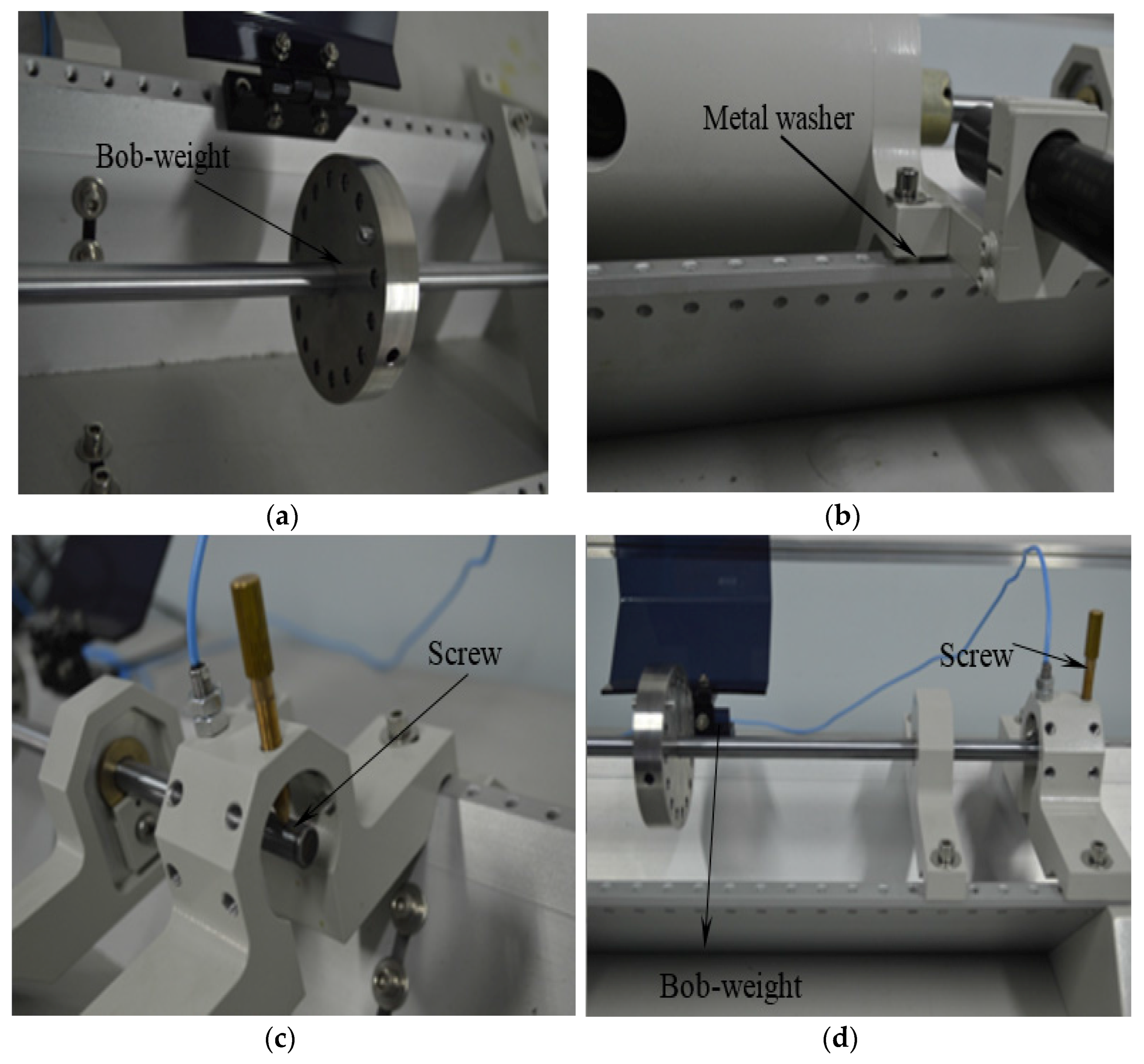
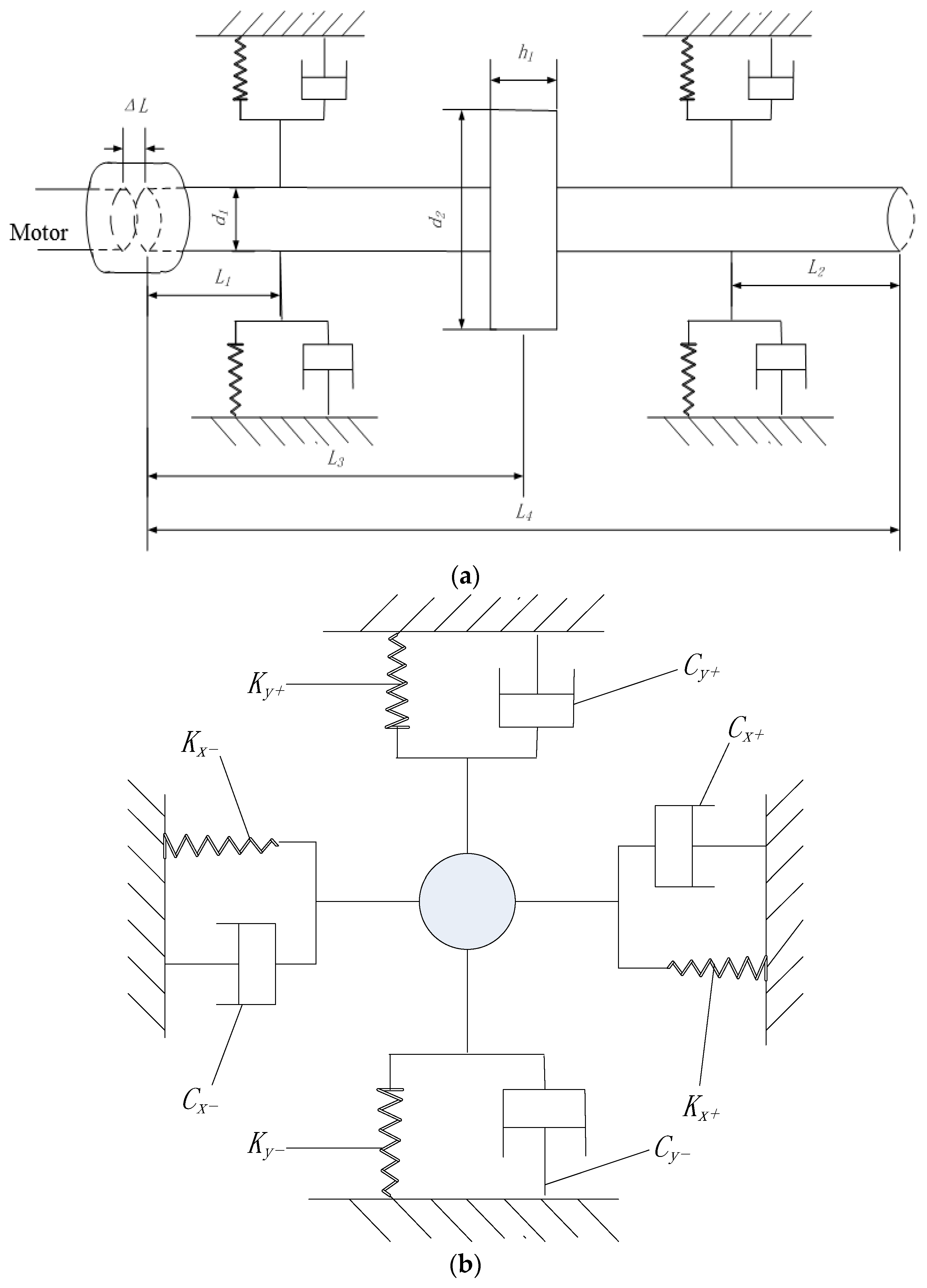
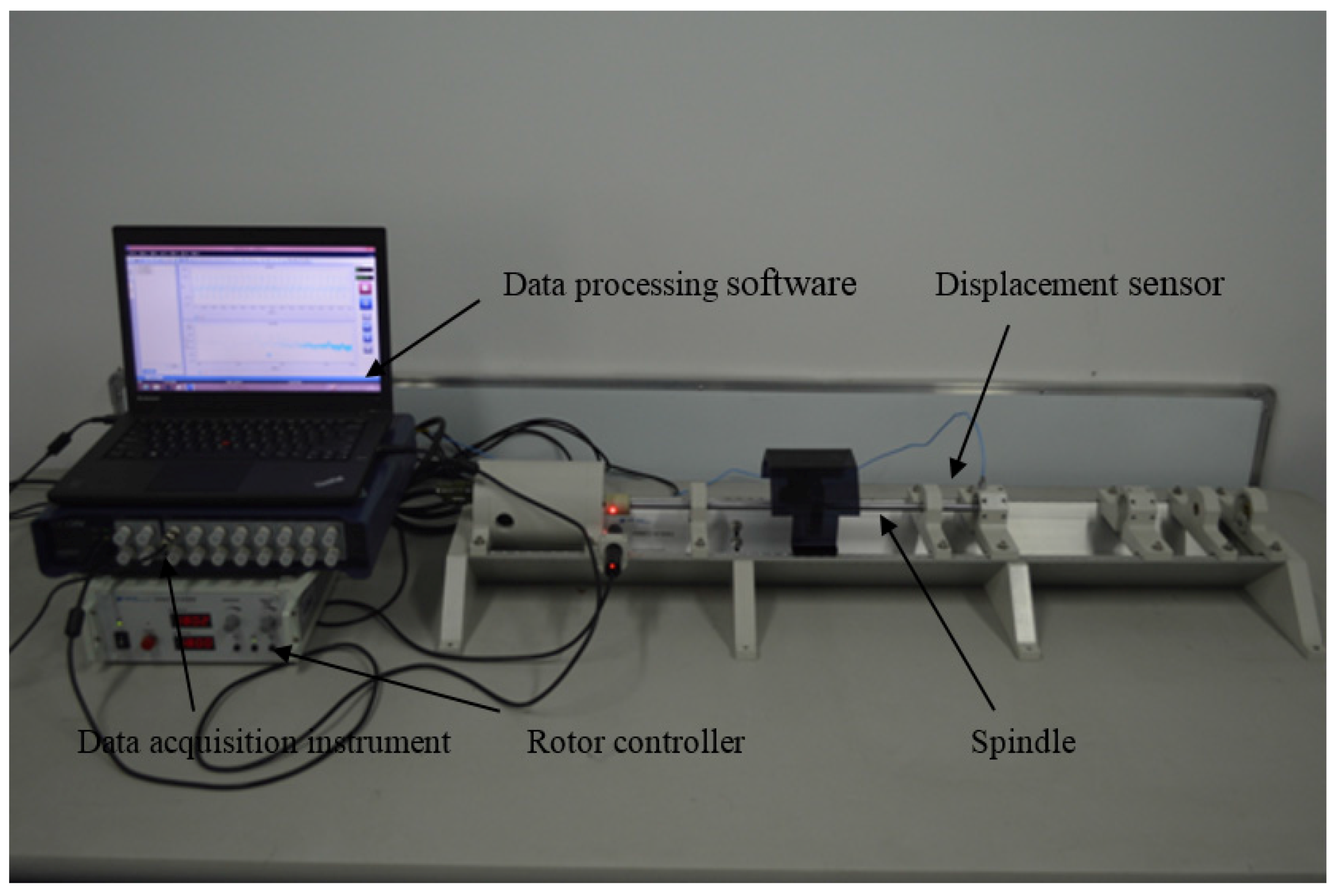
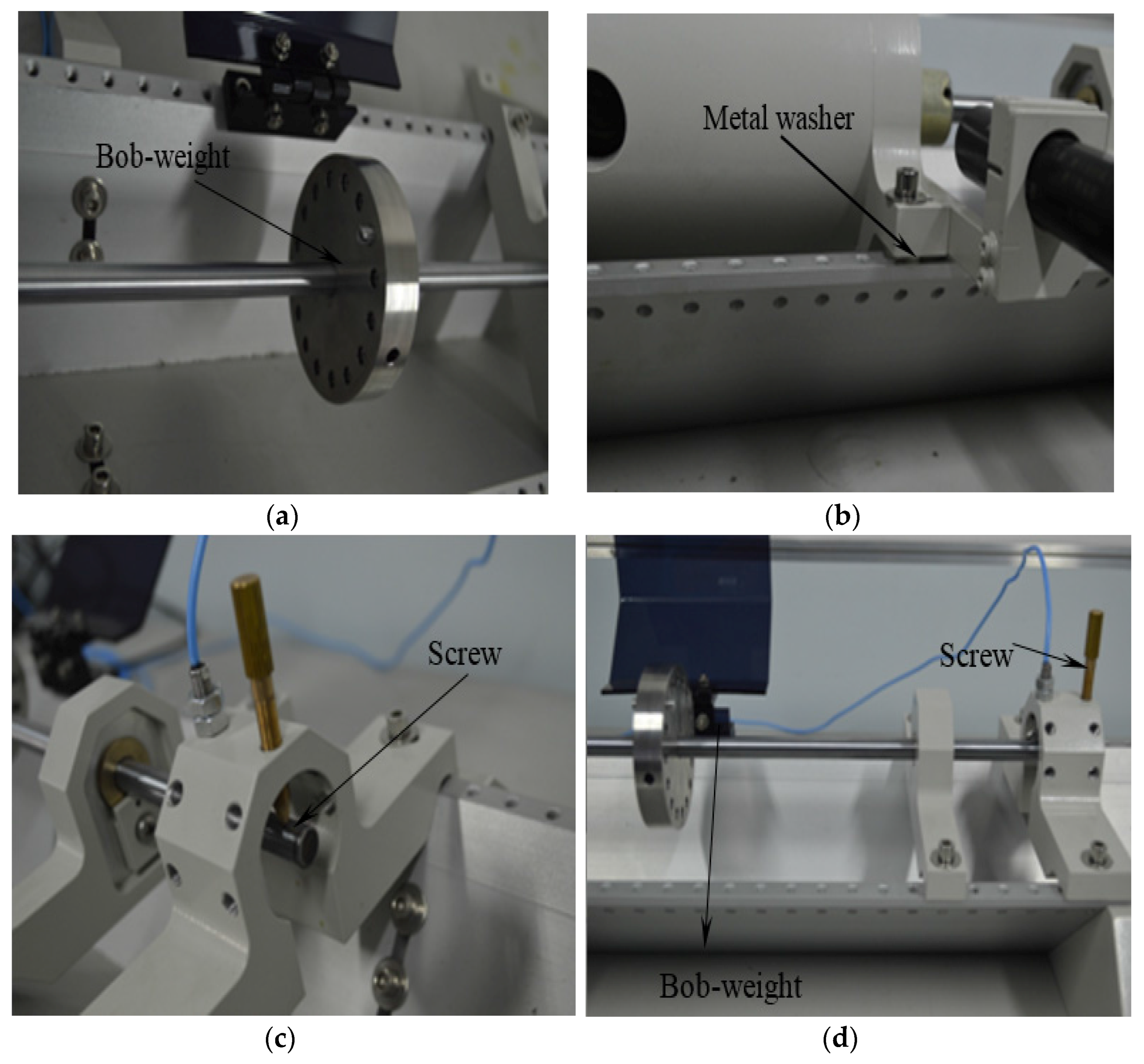
Section 3, finite element (FE) models of shafts are constructed; an example is presented; and the shaft unbalance, misalignment, rub-impact and the combination of rub-impact and unbalance are considered. To further apply the present method to real-world usage, the experimental investigations and further works are discussed in
Section 4. Finally, the conclusion of this study is given in
Section 5.
5. Conclusions
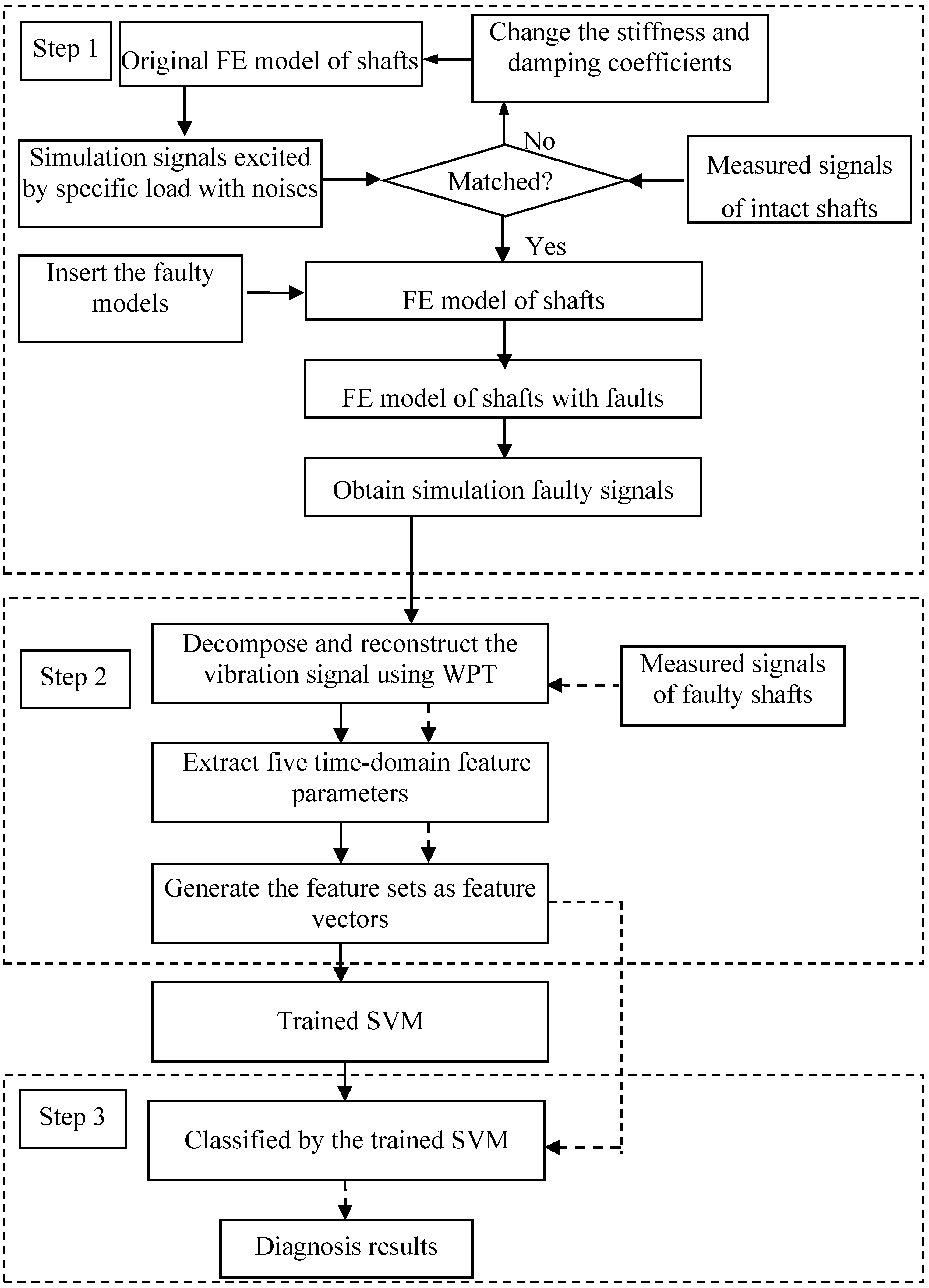
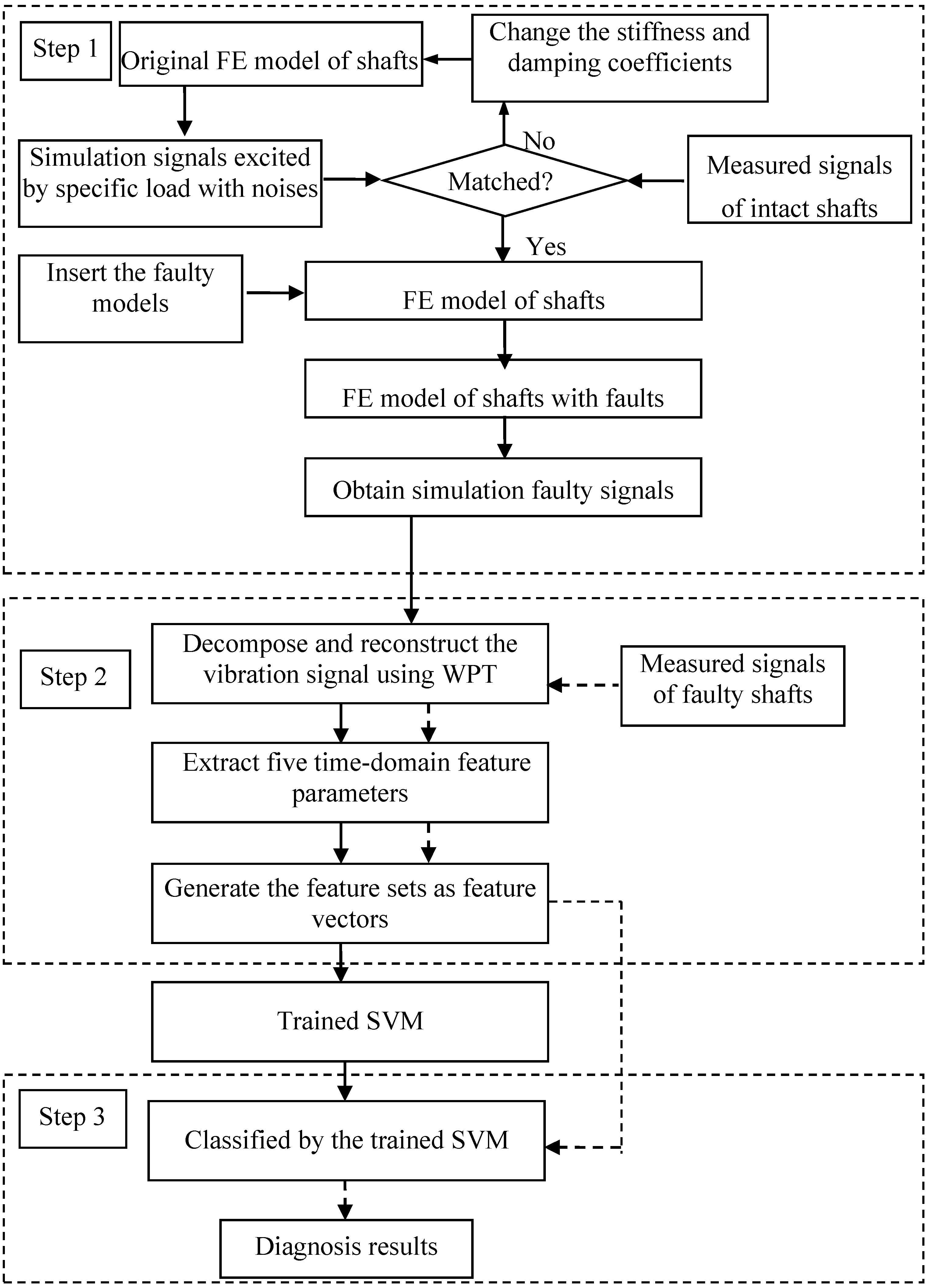
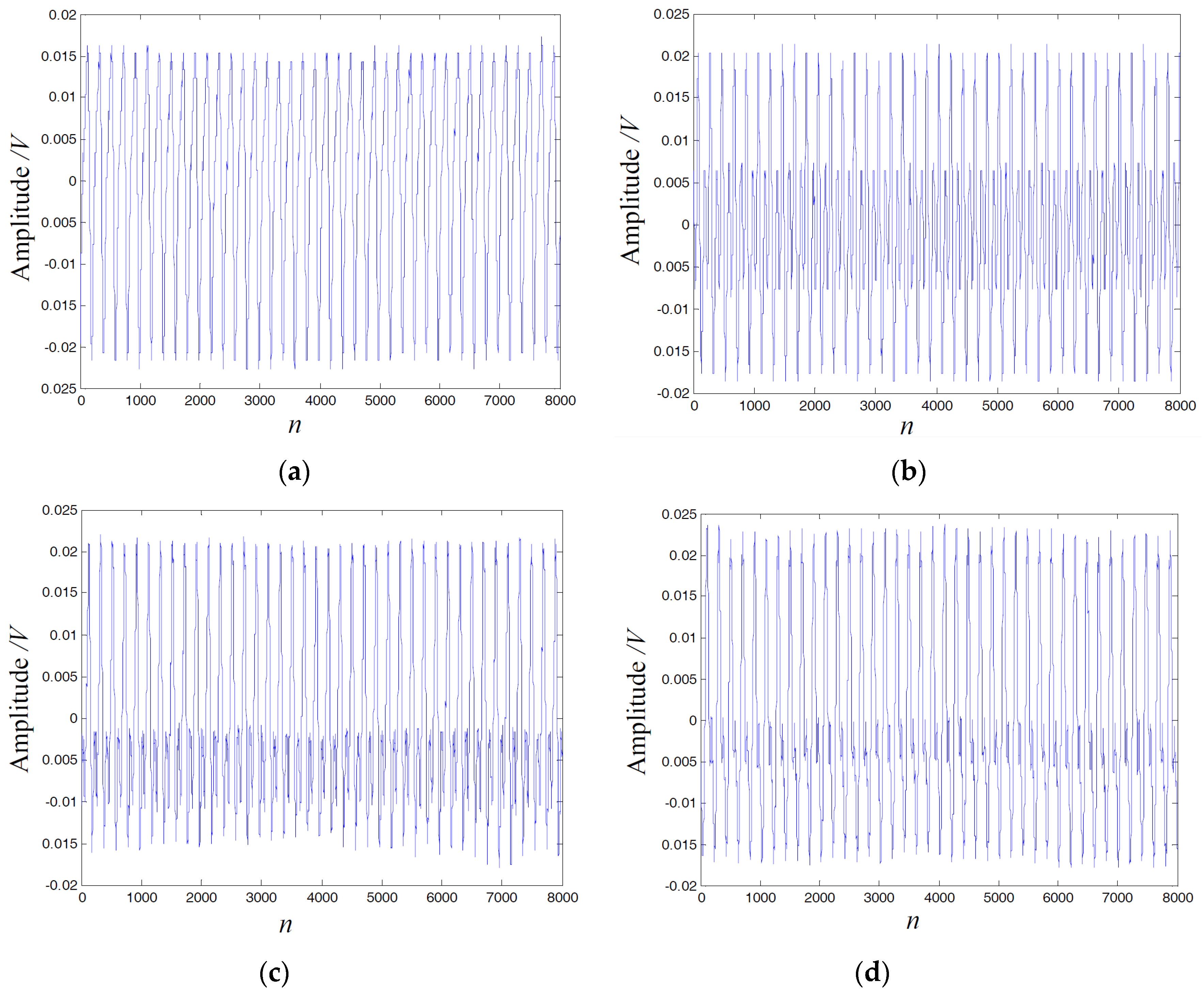
Intelligent diagnosis methods play a key role to prevent and detect faults in mechanical systems, except for the lack of faulty training samples. Motivated by molecular dynamics simulation-based personalized medicine, we develop the concept of the numerical simulation-based personalized diagnosis methodology and, more specifically, a personalized fault diagnosis method using FEM, WPT and SVM to detect faults in a shaft. Numerical and experimental investigations are performed, and the fault diagnosis of the shafts is given. In the simulation, the classification accuracy rates of unbalance, misalignment, rub-impact and the combination of rub-impact and unbalance are 93%, 95%, 89% and 91%, respectively. However, in the experimental investigations, this decreased to 82%, 87%, 73% and 79%. The results verified that the proposed method has the ability to distinguish the fault types. The numerical simulation-based personalized diagnosis methodology has many advantages, such as the activation of intelligent diagnosis methods by providing the complete faulty samples; the resolution of diagnosis reliability for a single machine stems from assembly variation with dynamic behaviors, influences from the operation environment, etc.
However, through the presented methodology, which is more likely to be expanded into more complex mechanical systems, such as gears, bearings, transmission systems, etc., the development of a standard FE model updating technique is the most important to obtain the agreeable numerical simulation faulty samples under different work conditions for the same type of mechanical systems. Furthermore, the computational cost is small for the present one-dimensional (1D) FE model employed. For complex mechanical systems, the calculation process is time consuming, but the proposed methodology only requires pre-computing the training samples, which serve as the inputs into the intelligent diagnostic models, such as SVM, GAs, NNs, etc.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}