3.1. Static Output-Feedback Centralized Controllers
Static output-feedback controllers can be designed to perform a fast and effective computation of the control actions from the available feedback information. Typically, these kind of controllers can be written in the form
where
is the vector of control actions,
is a constant control gain matrix and
is a vector of measured outputs. According to the results summarized in
Appendix B, a suboptimal static output-feedback
controller can be computed for the linear system in Equation (
22) by solving the LMI optimization
given in Equation (A8). The design procedure involves a measured-output vector of the form
that models the available feedback information, and a vector of controlled outputs
that allows computing the overall cost of the system response and the control action. In this work, we assume that the relative velocities associated to the actuation devices are measurable and consider the vector of measured outputs:
where
is the total number of actuation devices and
represents the relative velocity corresponding to the actuation device
. For the control configuration
ℓ, the vector of measured outputs can be written as a linear combination of the state variables defined in Equation (
15) using the measured-output matrix
where
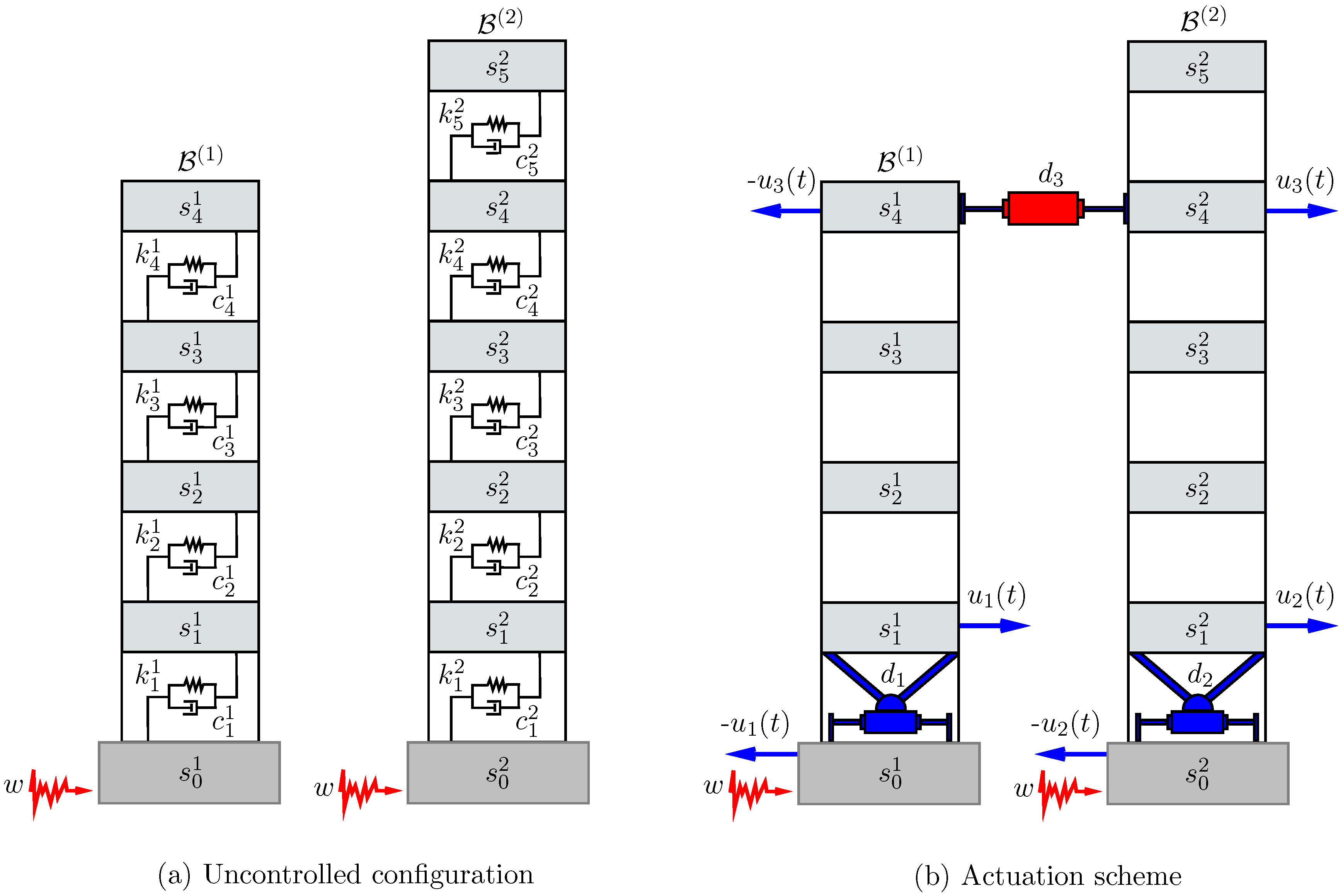
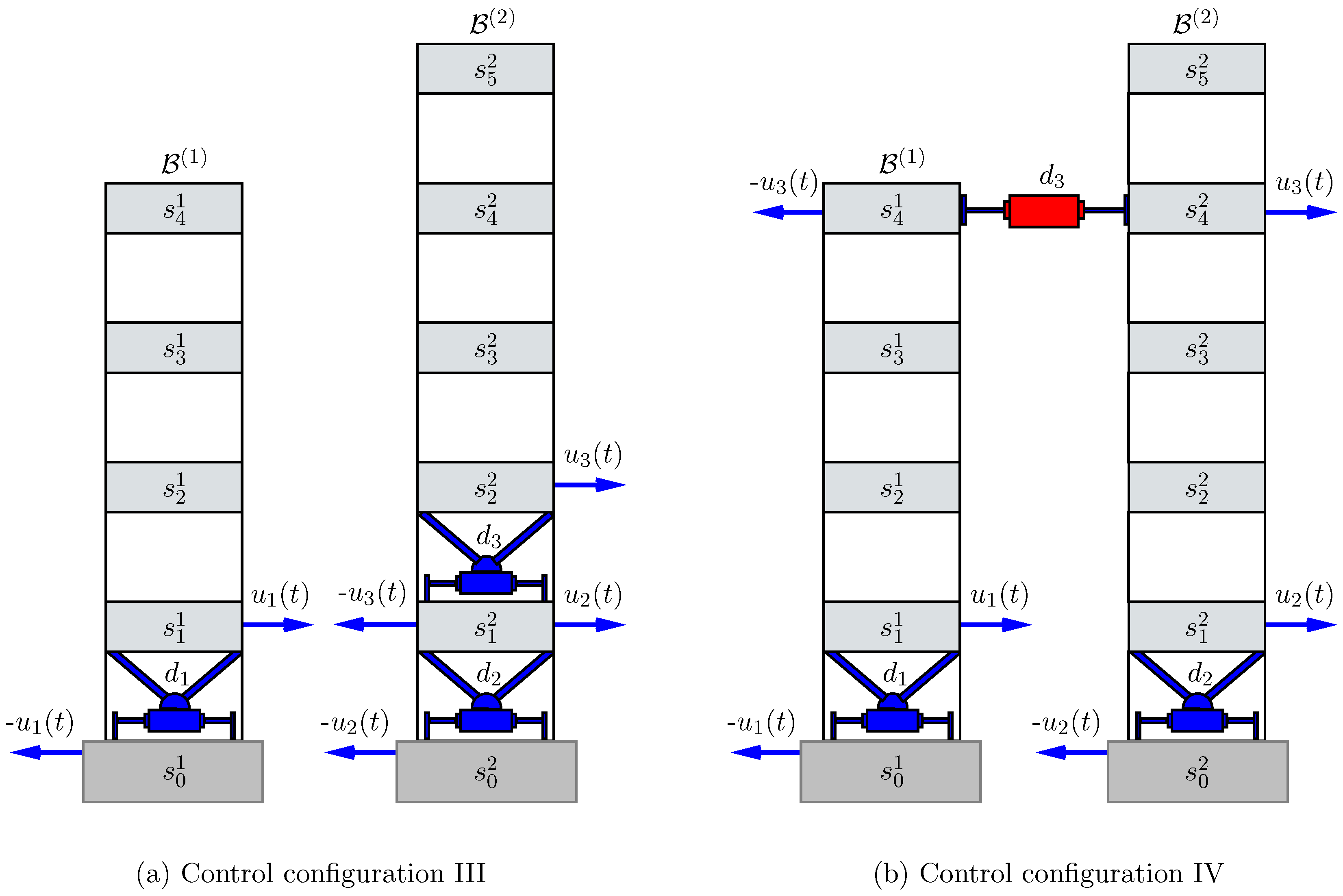
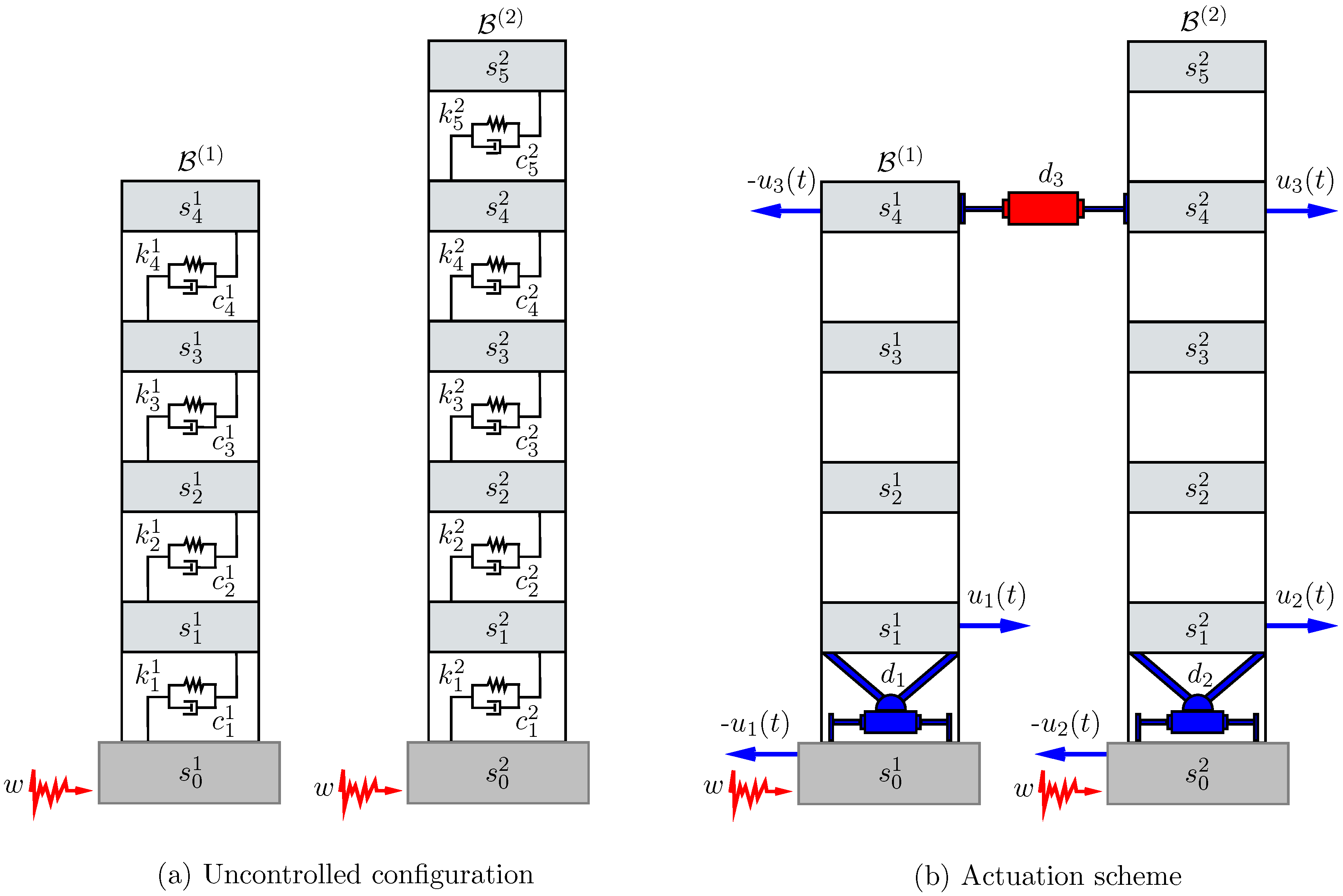
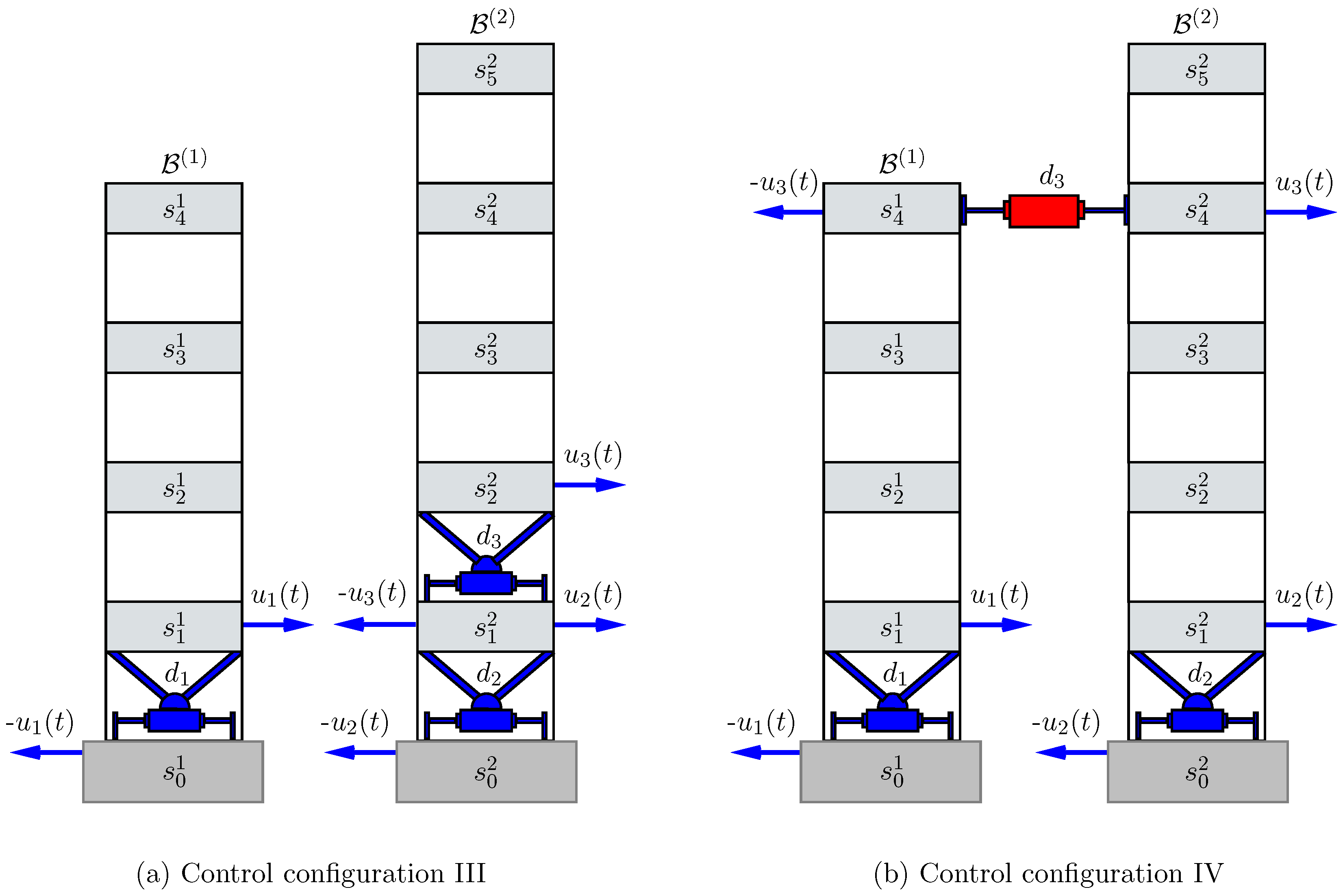
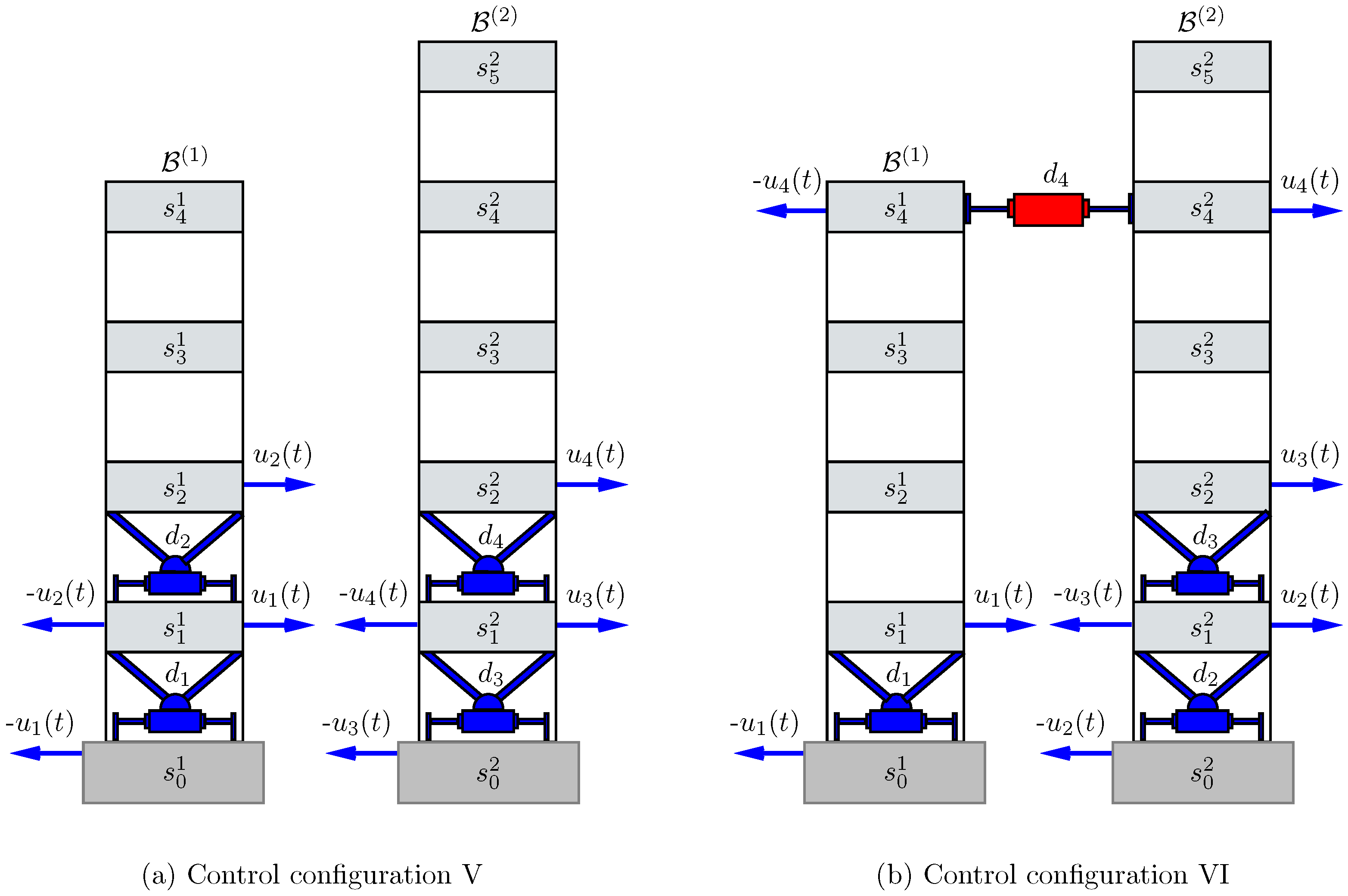
is the corresponding control location matrix. Thus, for the configuration CC6 displayed in
Figure 4b, the number of actuation devices is
and the measured-output vector has the form
, where
is the interstory velocity at the first-story level in building
,
and
denote the interstory velocity at the first and second story levels in building
, respectively, and
is the interbuilding velocity at the four-story level. In this case, by considering the matrix
given in Equation (
26), we obtain the measured-output matrix
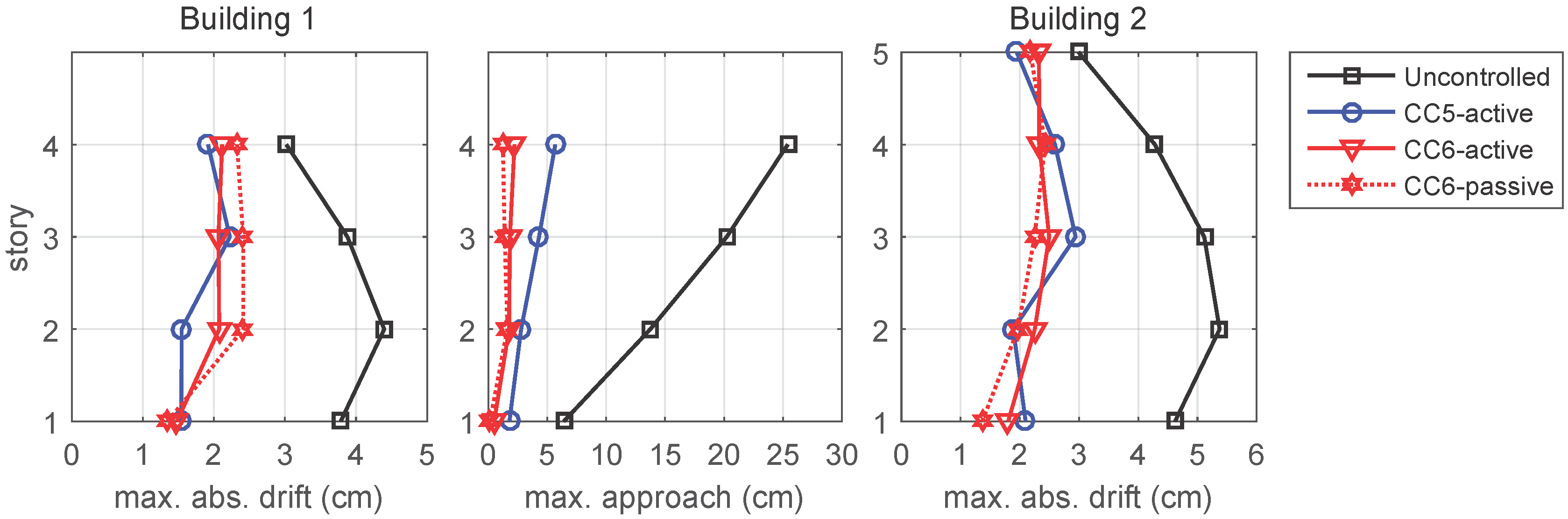
To define the controlled-output vector
, it should be noted that large interstory drifts and interbuilding approaches must both be avoided in order to prevent buildings’ structural damage and interbuilding collisions. Additionally, moderate control efforts are also convenient. To this end, we consider the controlled-output matrices
where
,
and
are scaling coefficients that compensate the different magnitude of interstory drifts, interbuilding approaches and control forces, respectively,
and
are the matrices given in Equation (
19), and
is the total number of actuation devices of the considered control configuration. With this choice, the controlled-output vector satisfies
To obtain a velocity-feedback
controller for the control configuration
ℓ, we consider the system matrices
,
and
corresponding to the control location matrix
, the mass and stiffness values given in
Table A1 (see
Appendix A) and the damping matrices in Equations (
A1) and (
A2); the measured-output matrix
in Equation (
31); and the controlled-output matrices
and
in Equation (
33) defined by the corresponding control dimension
and the scaling coefficients
Next, by applying the computational procedure described in
Appendix B, we obtain a velocity-feedback control gain matrix
and an upper bound
of the corresponding
-norm
, which can be computed by considering the closed-loop transfer function
in Equation (A17) and solving the optimization problem given in Equation (A16). For the control configurations CC1 and CC2, we obtain the following velocity-feedback control gain matrices
and the
-value upper bounds
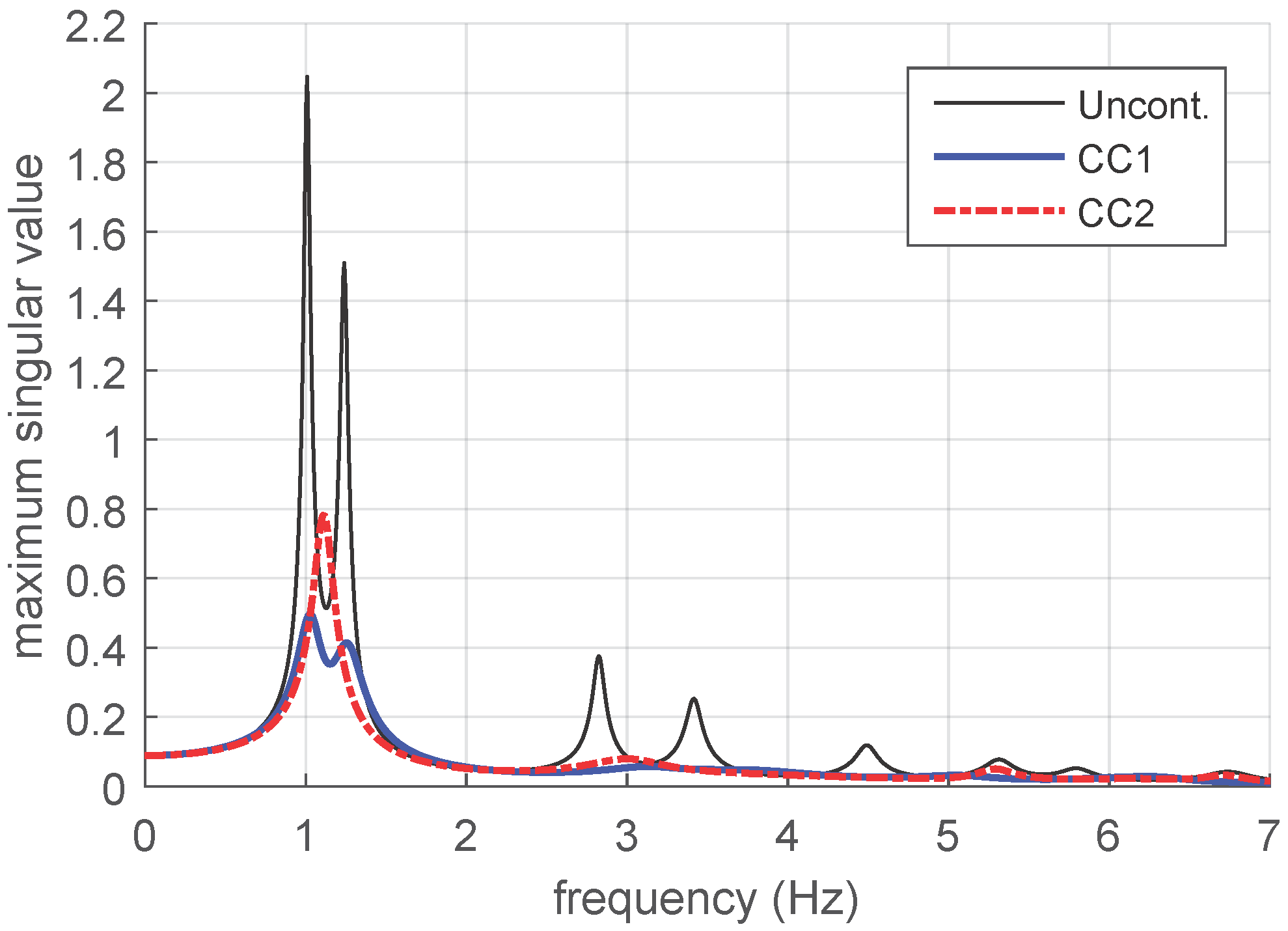
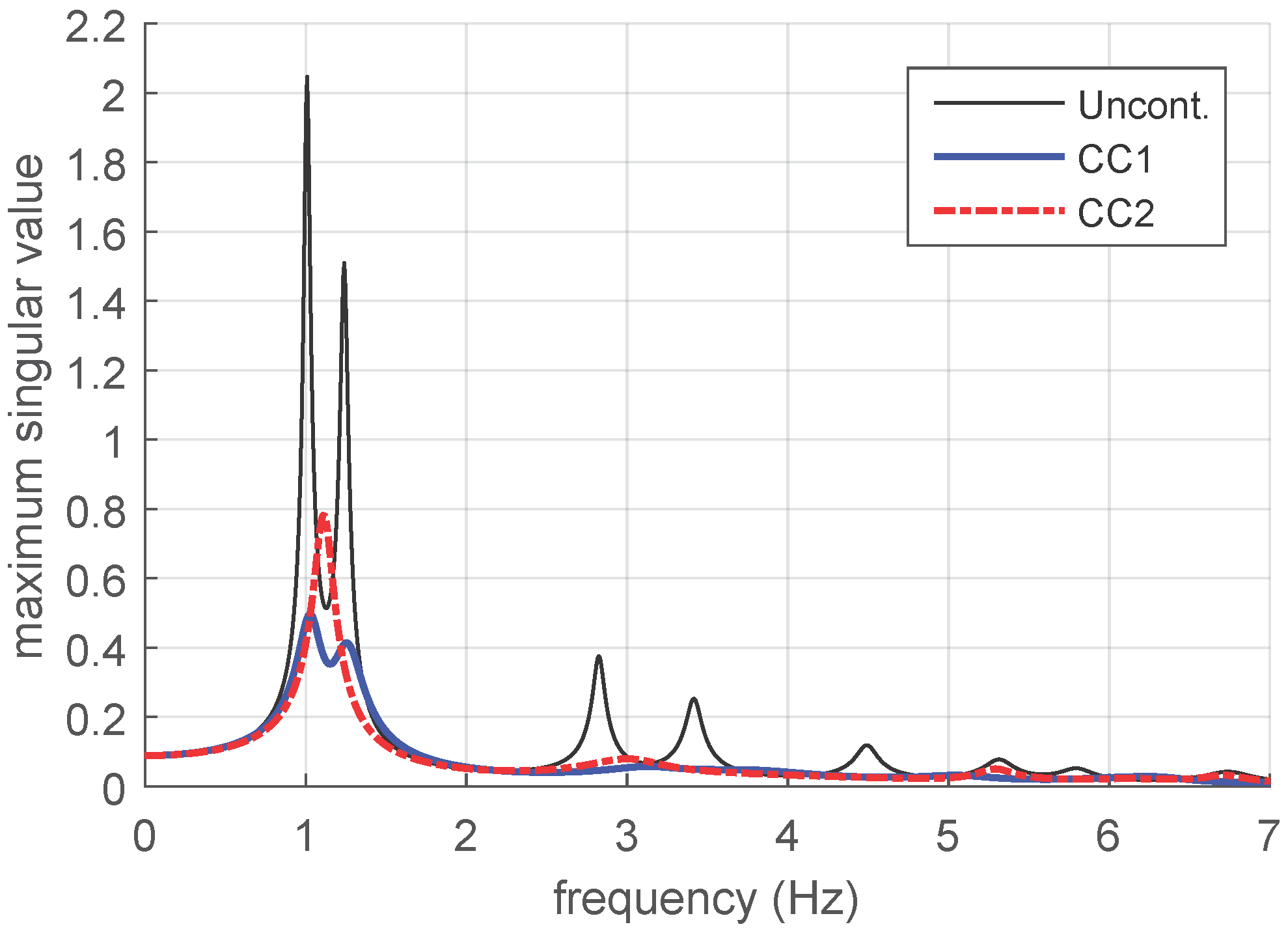
To illustrate the frequency behavior of the velocity-feedback controllers defined by the gain matrices
and
, the maximum singular values of the closed-loop transfer functions
,
and the open-loop transfer function
are presented in
Figure 5. In this figure, the thin black solid line displays the maximum singular values of the open-loop transfer function and shows the frequency response characteristics of the uncontrolled two-building structure. The peaks in this plot are associated to the natural resonant frequencies of the individual buildings, which are presented in
Table 1. The main peak-value is associated to the frequency
Hz and has a magnitude
which corresponds to the
-norm of the uncontrolled configuration. The thick blue solid line presents the frequency response of the configuration CC1 with the velocity-feedback control gain matrix
, and the red dash-dotted line shows the frequency response of the configuration CC2 with the velocity-feedback control gain matrix
. As indicated in Equation (A16), the largest peak-values in these plots correspond to the controllers
-norms given in Equation (
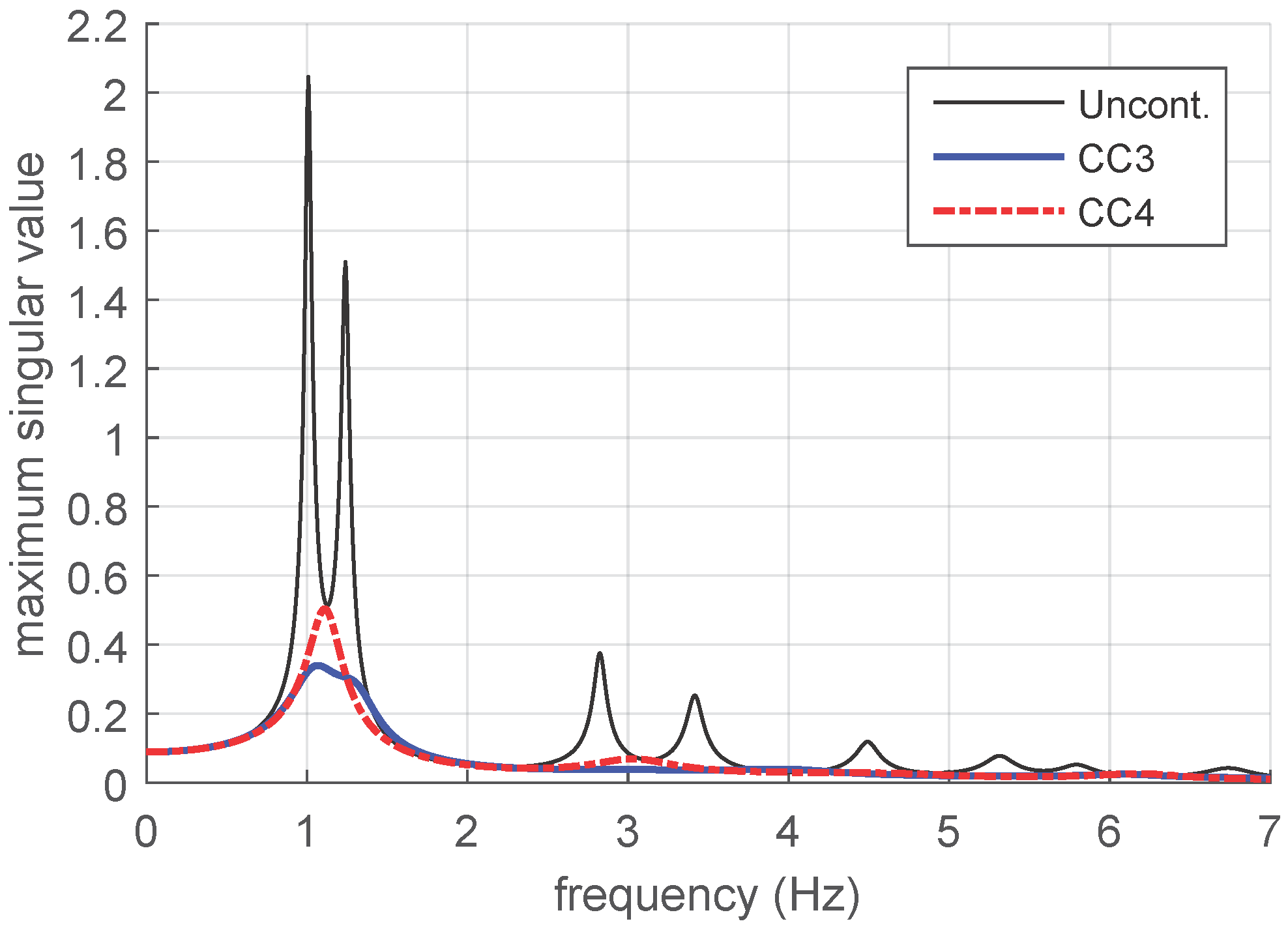
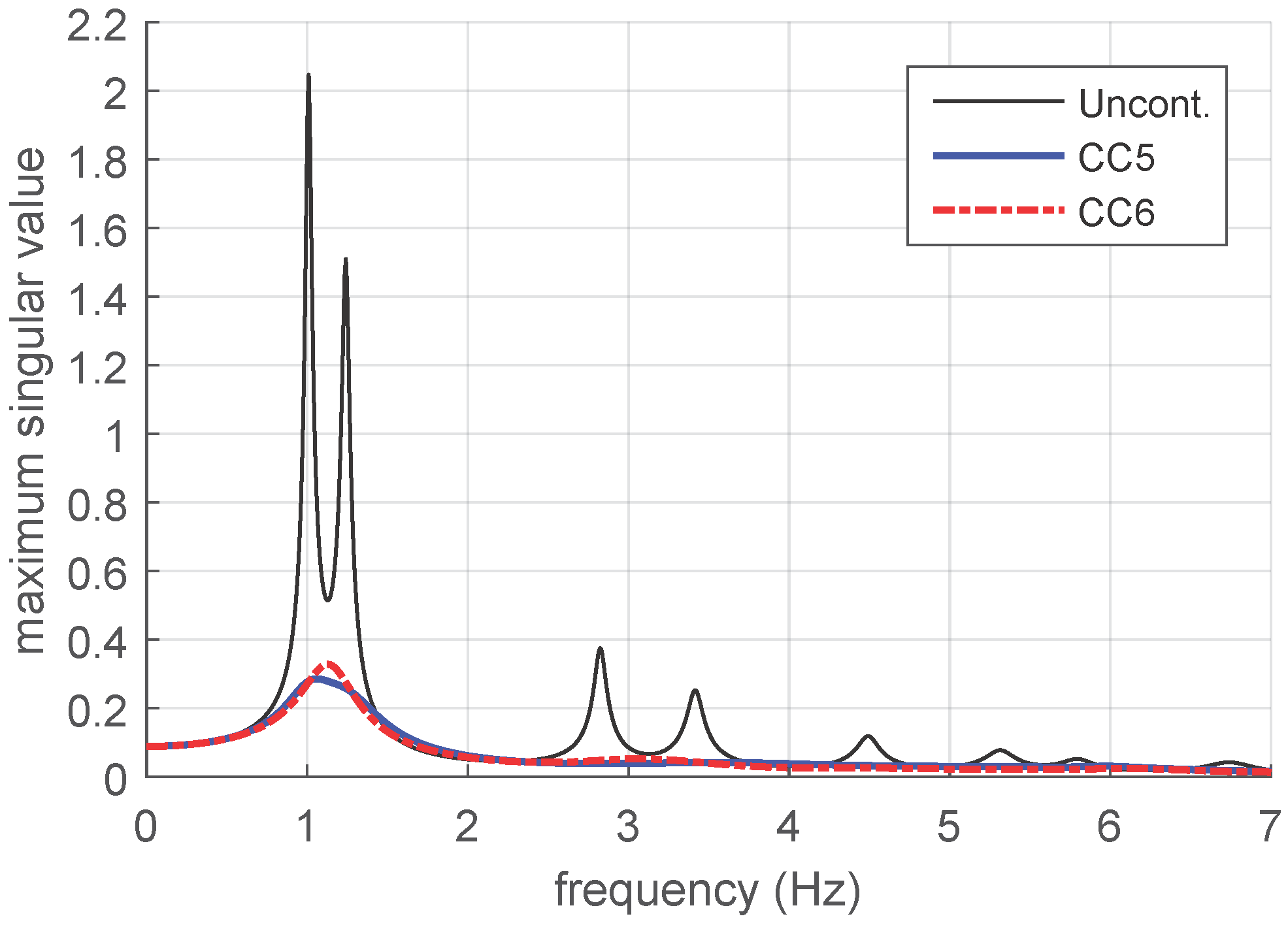
38). Following the same design procedure, we obtain the velocity-feedback control gain matrices
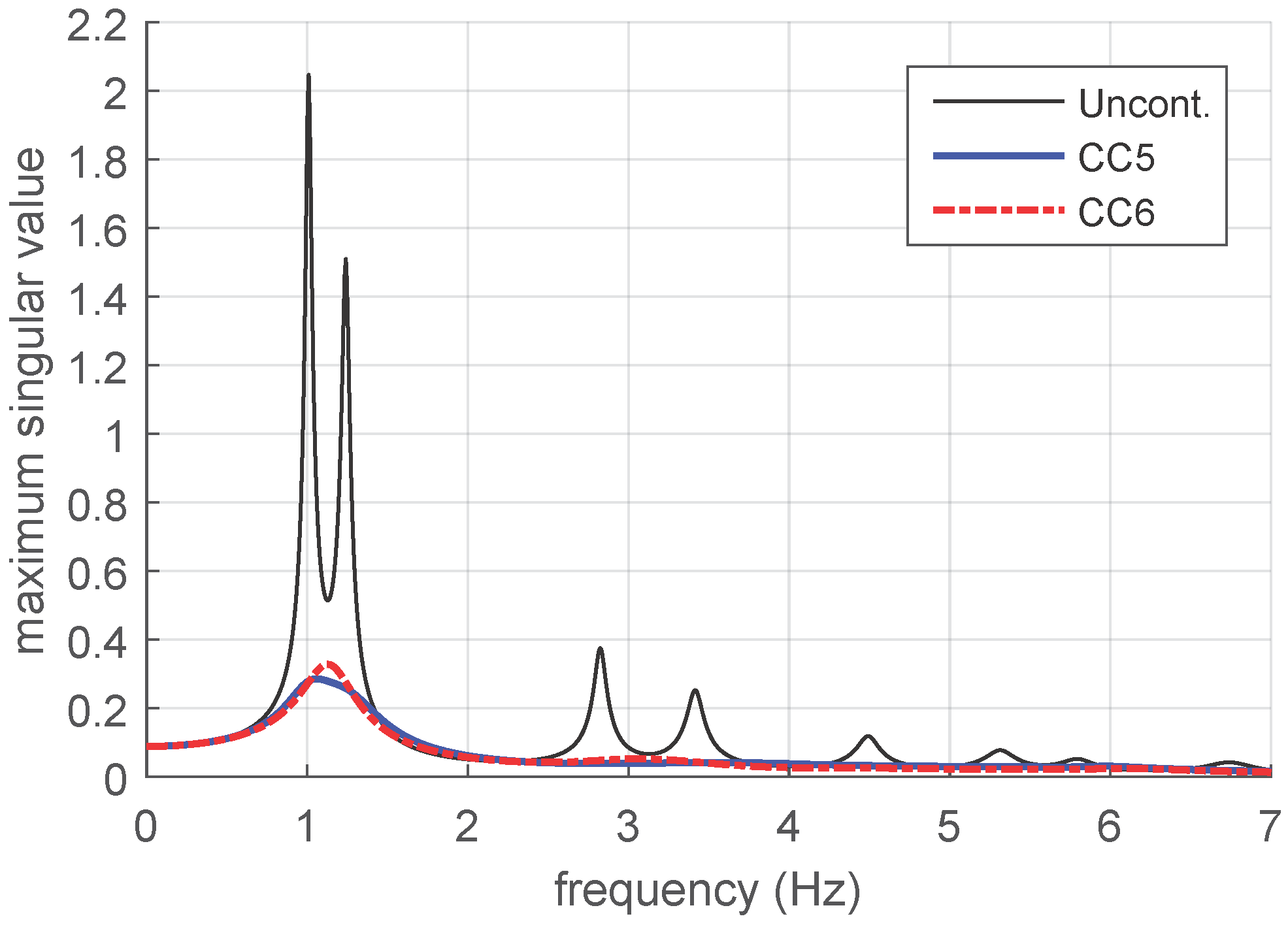
for the control configurations CC3 and CC4, respectively, the control gain matrix
for the configuration CC5, and finally, the control gain matrix
for the control configuration CC6. The corresponding
-values and upper bounds
are collected in
Table 2. The frequency responses are presented in
Figure 6 and
Figure 7, using a blue solid line for the unlinked configurations (CC3 and CC5), and a red dash-dotted line for the linked configurations (CC4 and CC6). According to the
-values in
Table 2 and the value
in Equation (
40), three facts can be noted: (i) all the controllers obtained with the proposed design methodology provide a good level of reduction in the
-norm value, (ii) an increasing effectiveness is attained with a larger number of actuation devices, and (iii) smaller
-values are obtained by the unlinked control configurations. All these facts can also be clearly appreciated by observing the peak-values in the frequency plots presented in
Figure 5,
Figure 6 and
Figure 7. These frequency plots also show that, in all the cases, a significant reduction of the vibrational response is additionally attained in the secondary resonant peaks.
3.2. Static Velocity-Feedback Decentralized Controllers
From a practical point of view, the controllers defined by the velocity-feedback gain matrices
computed in the previous section have the important advantage of using a reduced system of sensors which are naturally associated to the actuation devices. However, they also present two serious drawbacks. Firstly, the complete vector of measured outputs is used to compute the control actions and, consequently, a wide communication system would be necessary in the controller implementation. Secondly, producing the corresponding actuation forces would require active devices with a large power consumption and potential reliability issues. These two disadvantages, typically present in active vibration control of large structures, can be properly overcome by considering fully decentralized velocity-feedback controllers with control gain matrices of the form
which can be obtained by solving the LMI optimization problem
in Equation (A8) with the same matrices used in the previous controller designs and constraining the LMI variable matrices
and
to a diagonal form. As indicated in [
17,
40], if the gain matrix elements
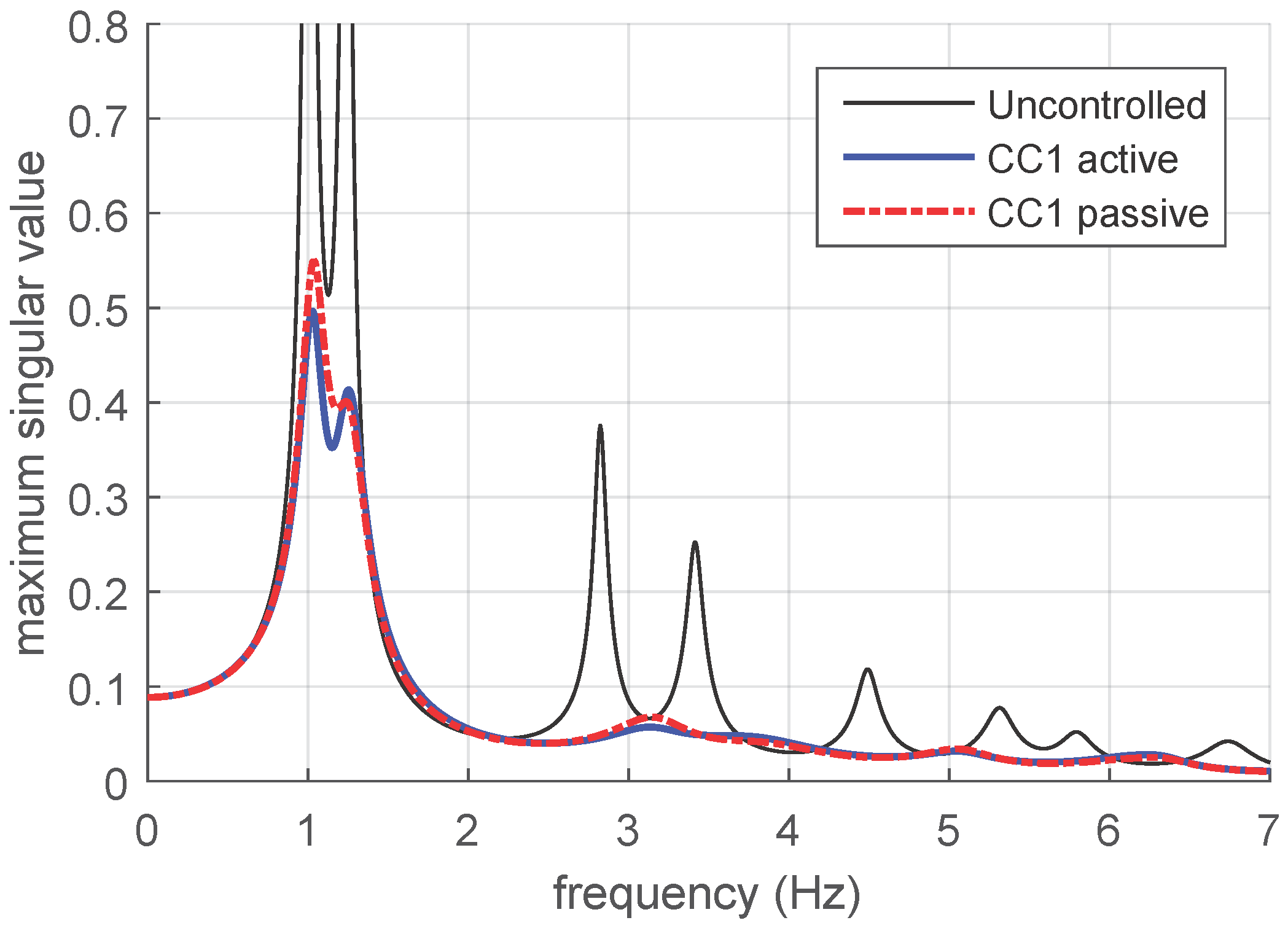
are all negative, then this kind of controllers admit a passive implementation using linear viscous dampers. Thus, for instance, by applying this design methodology to the control configuration CC1, we obtain the following diagonal gain matrix:
Hence, the decentralized velocity-feedback controller defined by the diagonal gain matrix
can be implemented using two interstory linear damping devices
and
with respective damping constants
Ns/m and
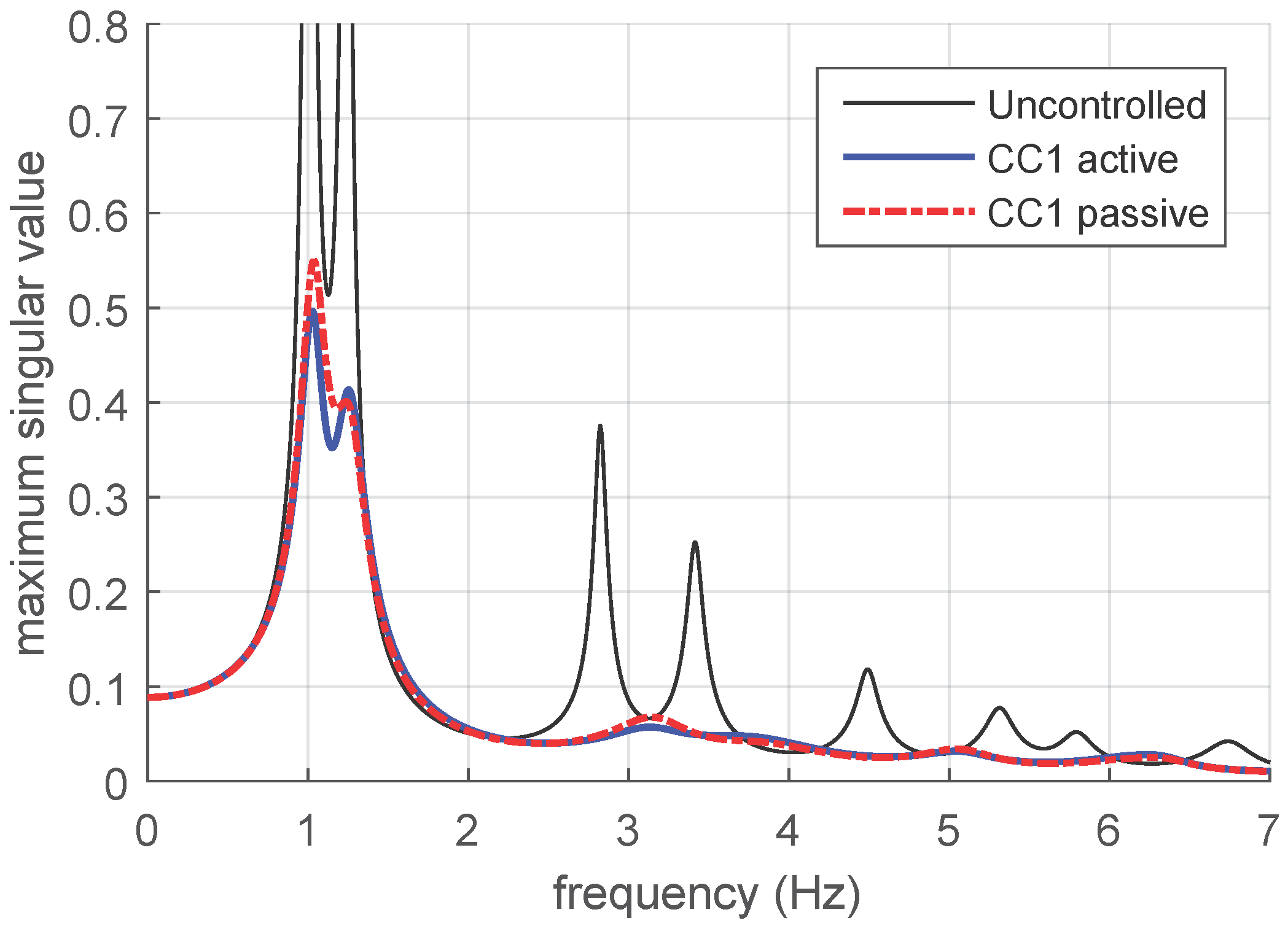
Ns/m. The frequency response characteristics of this passive control system are displayed in
Figure 8 using a red dash-dotted line. The frequency response corresponding to the uncontrolled configuration (thin black solid line) and the centralized controller defined by the gain matrix
(thick blue solid line) are also included as a reference. The plots in the figure clearly show the good behavior of the obtained passive controller, which practically matches the performance of the active centralized controller over most of the frequency range, and produces a small increment (of about 10%) in the peak-value corresponding to the main resonant frequency.
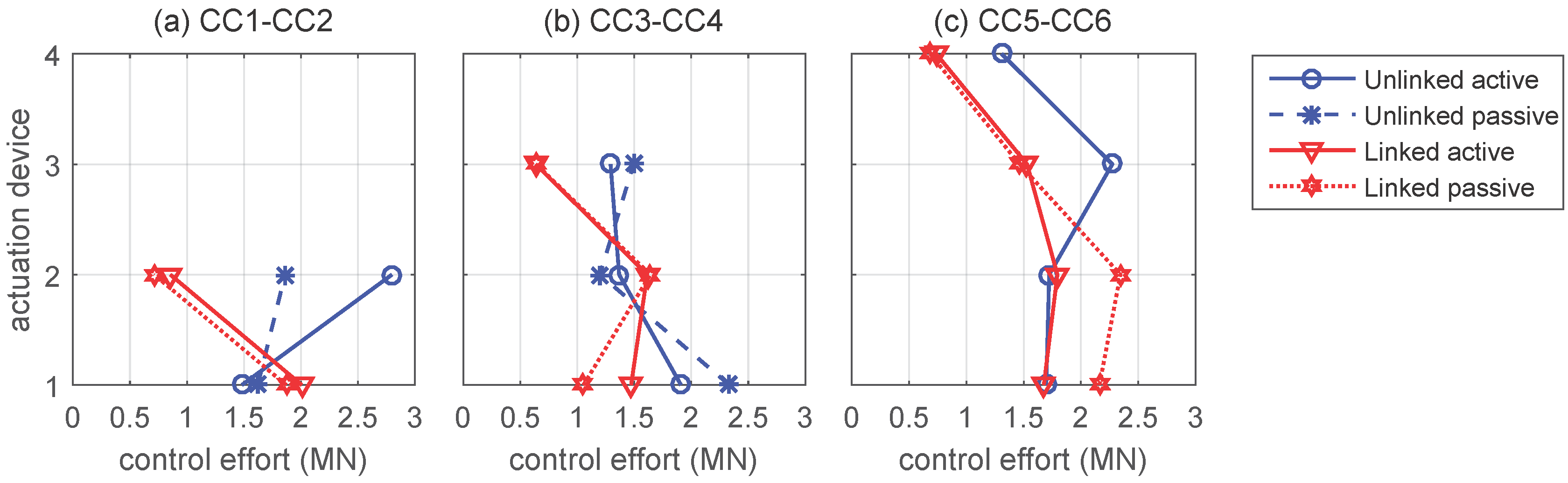
Using the same design strategy to compute decentralized velocity-feedback controllers for the other control configurations considered in this paper, we have obtained diagonal gain matrices with the values presented in
Table 3. Comparing the corresponding
-values collected in
Table 4 and the value
in Equation (
40), it can be appreciated that the same three facts observed in the centralized controller designs also apply to the decentralized controllers: (i) all the controllers obtained with the proposed design methodology provide a good level of reduction in the
-norm value, (ii) an increasing effectiveness is attained with a larger number of actuation devices, and (iii) smaller
-values are obtained by the unlinked control configurations. However, two new elements appear in the decentralized design: (iv) the risk of failure of the controller design procedure is higher in the decentralized designs, and (v) the
-value attained by some decentralized controllers is lower than the one obtained by the associated centralized controller.
The increased risk of failure in the decentralized design procedure can be explained by the additional structure constraints introduced in the LMI optimization problem, which can produce feasibility issues. This kind of numerical problems are poorly understood and sometimes depend on the particular numerical solver and the options used in the LMI optimization procedure. In our case, the feasibility issues have only been encountered in the design of a diagonal gain matrix for the control configuration CC5. Regarding the
-value produced by some decentralized controllers, by comparing the
-values in
Table 2 and
Table 4, it can be seen that a lower
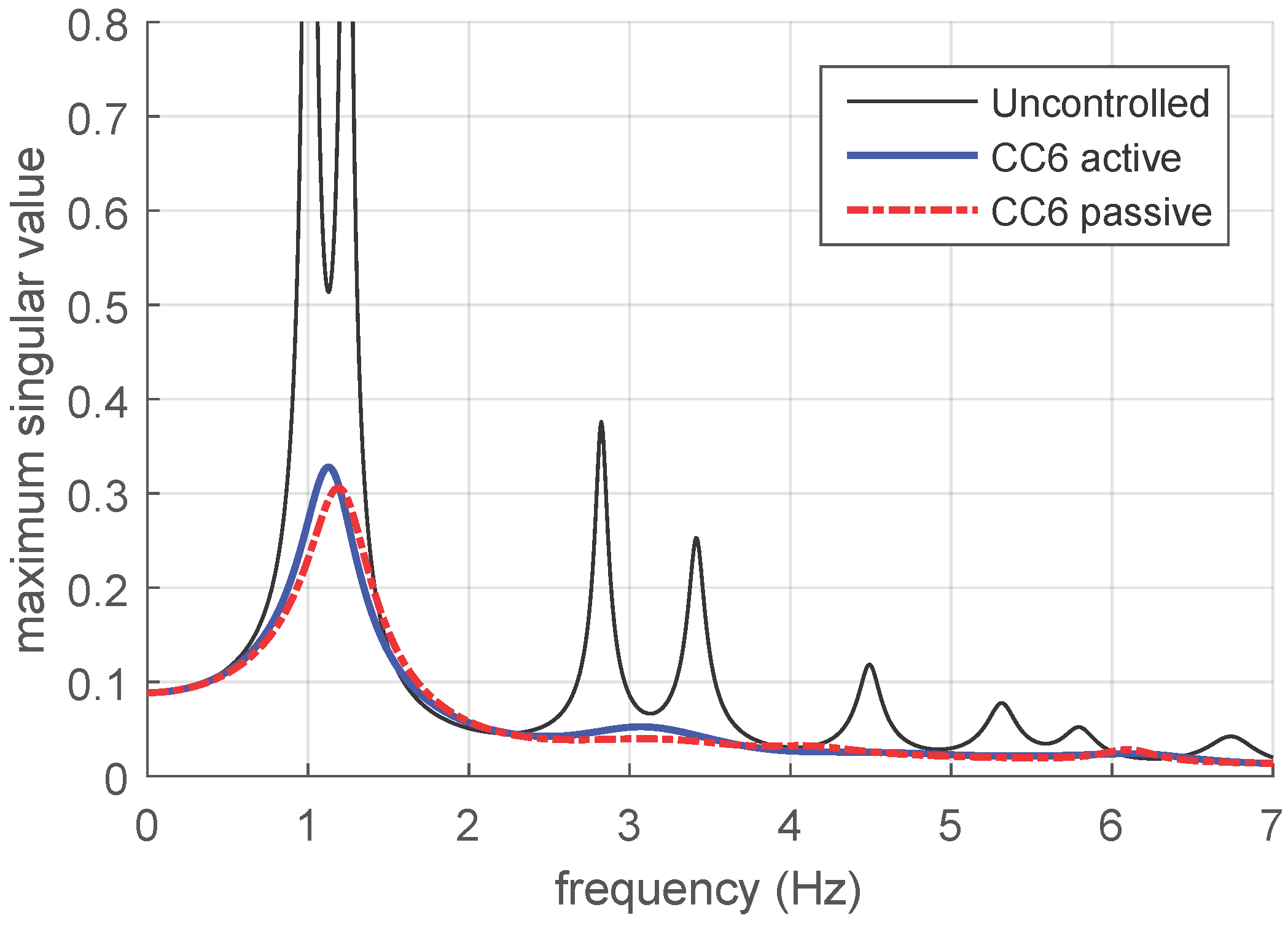
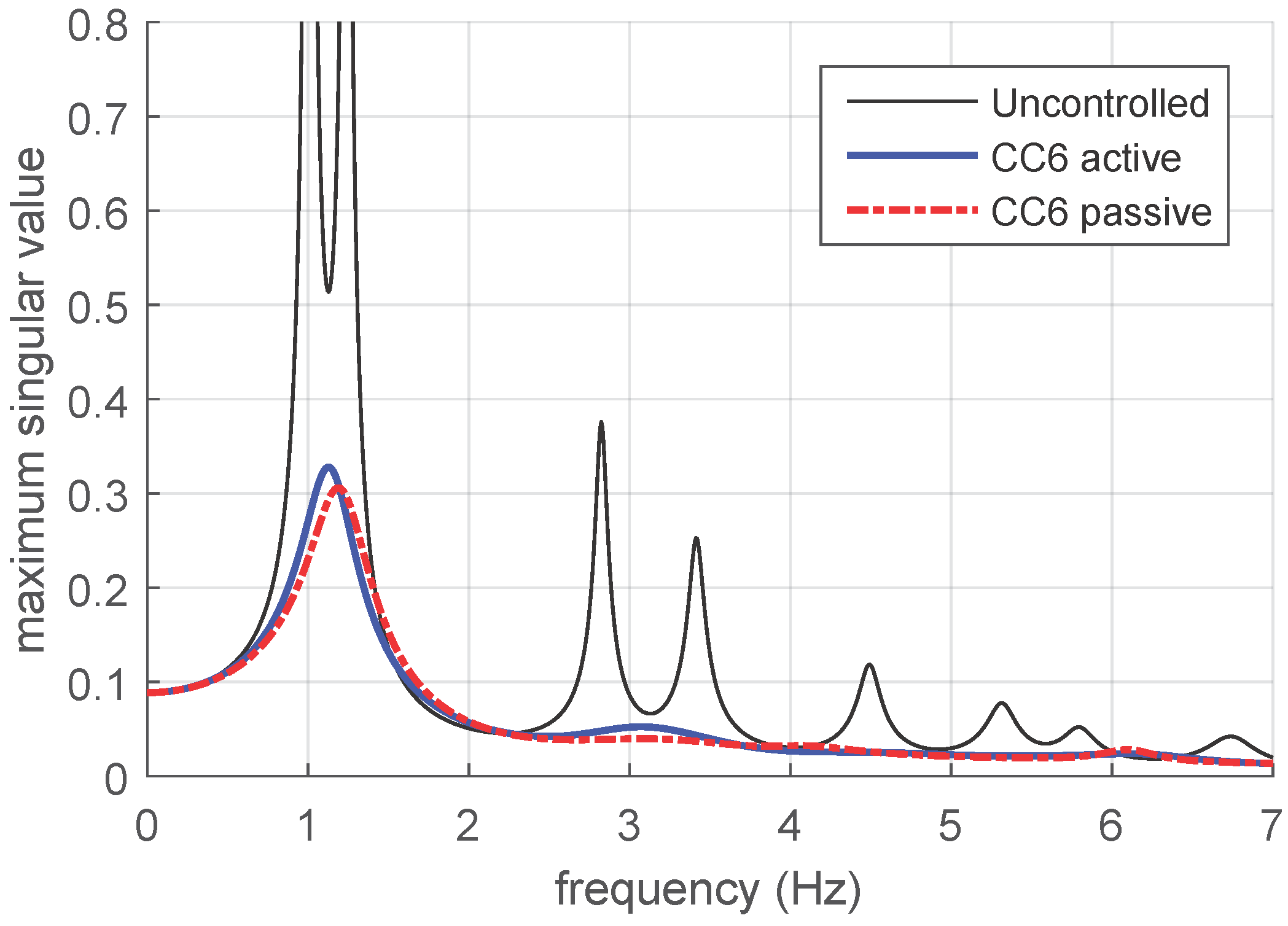
-value is attained by the decentralized controllers for the control configurations CC2, CC3 and CC6. A clear view of this situation can be obtained in
Figure 9, which presents the frequency response corresponding to the passive control system defined by the diagonal gain matrix
(red dash-dotted line) and the corresponding centralized controller defined by the gain matrix
given in Equation (
43) (thick blue solid line). To explain this unexpected fact, it should be noted that the LMI optimization procedure is based on the upper bound
and produces a suboptimal
controller. Obviously, the upper bound
corresponding to the unstructured gain matrix
must be inferior to the upper bound
obtained for the diagonal gain matrix
, which has been computed by solving a constrained version of the same LMI optimization problem. Looking at the data in
Table 2 and
Table 4, we can see that the inequality
certainly holds for all the control configurations. Additionally, the actual
-values
and
must satisfy
and
. However, these inequalities do not exclude the observed fact that
. That is, they do not exclude the unexpected possibility of obtaining a passive controller with a better performance than the corresponding active controller.
Remark 1. In this paper, all the computations have been carried out using Matlab R2015b on a regular laptop with an Intel Core i7-2640M processor at 2.80 GHz. The LMI optimization problems corresponding to the different controller designs have been solved with the function mincx() included in the Robust Control Toolbox. A relative accuracy of has been set in the solver options.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}