A Robust Asynchronous Sampled-Data Control Design for Nonlinear Systems with Actuator Failures


Department of Mathematics, Universitat Politècnica de Catalunya-BarcelonaTech (EEBE), 08034 Barcelona, Spain
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Appl. Sci. 2017, 7(9), 875; https://doi.org/10.3390/app7090875
Submission received: 3 August 2017
/
Revised: 19 August 2017
/
Accepted: 25 August 2017
/
Published: 26 August 2017
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:This paper presents a recent self-sampled-data control algorithm applied to nonlinear systems with actuator failures. Our approach uses the linear model of a given nonlinear system, and based on a granted actuator fault observer method, an asynchronous sampled-data fault compensator controller is then formulated. The proposed sampling rule is realized by using an event-detector monitoring signal invention. On this way, the sampled rate is self governed and asynchronous by nature. Hence, our contribution is twofold. Fist, a new auto-generated non-uniform sampled-data mechanism is stated. Second, we grant an event-triggered control law with actuator failure observation and compensation. Our findings are completely supported by employing Lyapunov’s theory. Finally, according to our numerical experiments applied to an undamped torsional pendulum, our design is able to detect a failure in the actuator device and it can stabilize the undamped torsional pendulum system presenting better performance in comparison to its open-loop deployment.
1. Introduction
Lately, asynchronous based on discrete-event sampled-data driven systems have extensively been applied to a huge number of engineering applications, specially in networked control systems; to name a few, see [1,2,3,4,5,6,7]. Basically, in sampled-data control algorithms, continuous-time systems are controlled by discrete-time controllers implemented in digital devices [8,9,10]. In asynchronous sampled-data systems, the sampled-rate to obtain discrete-time data from the measurable out signals given by the process is automatically governed by monitoring the occurrence of a event [1,2,11,12,13,14,15,16]. Hence, the sampling rate is auto generated according to the process demand and the stated control objective instead of imposing a homogeneous sampling-time pace. Therefore, an overload of the digital controlled systems is avoided; and it also helps, in digital networked controlled systems, to be robust under packet losses and bandwidth limitation of the communication channel, among others benefits.
To generate a non-uniform-sampled data mechanism, one key idea is to stick to a given sampling-moment as long as a normed criterion comparison is outside a programmed bounded set around the studied equilibrium point of the closed-loop system. For instance, in [4], the switching mechanism is activated as long as the plan state is outside a given bounded normed set. Then, and because of the sampled-data, Input-to-State stability is assured by using Lyapunov’s theory. Motivated by this idea, we propose a switching mechanism based on the normed comparison between the continuous-time control signal and its generated discrete-time control algorithm. Lyapunov’s theory is used to support our finding.
On the other side, actuator faults occurrence may cause fatal behavior of the closed-loop system; see, for instance, [17,18,19]. Moreover, and to increase the reliability and safety of sophisticate controlled systems, the design of actuator fault robust control and fault detection systems are an important challenger [1,18,19]. Motivated by the event-driven control design of self sampled-data design philosophy, and by employing our own design, the main objective of this paper is to grant an auto-sampling event-driven robust control design against actuator failures and a fault detection invention system applied to mechanical systems. Hence, our contribution is twofold. Fist, a new auto-generated non-uniform sampled-data mechanism is stated. Second, we grant an event-triggered control law with actuator failure observation and compensation. Our algorithm is then supported by employing Lyapunov’s theory. As an application example, for the mechanical part, we use the undamped torsional pendulum because it is unstable in the Lyapunov’s sense, and it is a nonlinear system too. Moreover, this system has been used in electrical science, biophysics, petrology, and so on [20]. According to our numerical experiments, our design is able to detect a failure in the actuator device and it can stabilize the undamped torsional pendulum system presenting better performance in comparison to its open-loop deployment.
The rest of this paper is structured as follows. Section 2 is spared into two subsections. The first one gives an actuator fault observer design based on the lineal model of the nonlinear plant. This is realized by using Lyapunov’s theory. The second one states the self sampled-data control design by using the obtained actuator fault observer and then by proposing an autonomous asynchronous sampling rule. Lyapunov’s theory is also employed to support our finding. Section 3 tests our design applied to the stabilization problem to an undamped torsional pendulum. According to numerical experiment results, our design presents an acceptable performance. On the other hand, some remarks are given in the Conclusion’s section. Finally, when there is no confusion, we write, for instance, as x (This comfort writing style is also employed in [6].).
2. Actuator Fault Observer and Asynchronous Sampled-Data Control Designs
Consider the following nonlinear system with actuator failure [17]:
where is the system state vector, , (Without lost of generality; here, we consider a single input system.). is the modeled additive actuator failure. Moreover, it is assumed that and are locally Lipschitz and differentiable functions in their arguments with . Finally, it is also assumed that [17].
2.1. Disturbance Actuator Fault Observer
From the linear model to the system (1):
conceive the next auxiliary dynamic system:
where . Then, by defining
and by using (2) and (3), we obtain
Just to construct an actuator fault estimation system, let us temporally assume that is constant. Hence, and by invoking the next Lyapunov function
we get
Then, by setting
we force
2.2. Event-Triggered Control Design
The main objective of this sub-section is to complement the stated actuator fault observer design granted in Theorem 1 by using a discrete-time event-triggered rule. To begin with, let us assume that there exists a constant gain matrix K such that the state feedback control law
the system is a Hurwitz matrix; i.e., the closed-loop system , its origin equilibrium point is exponentially stable. Therefore, the system is assumed controllable too.
Going further, let us invoke the discrete-time version of (10):
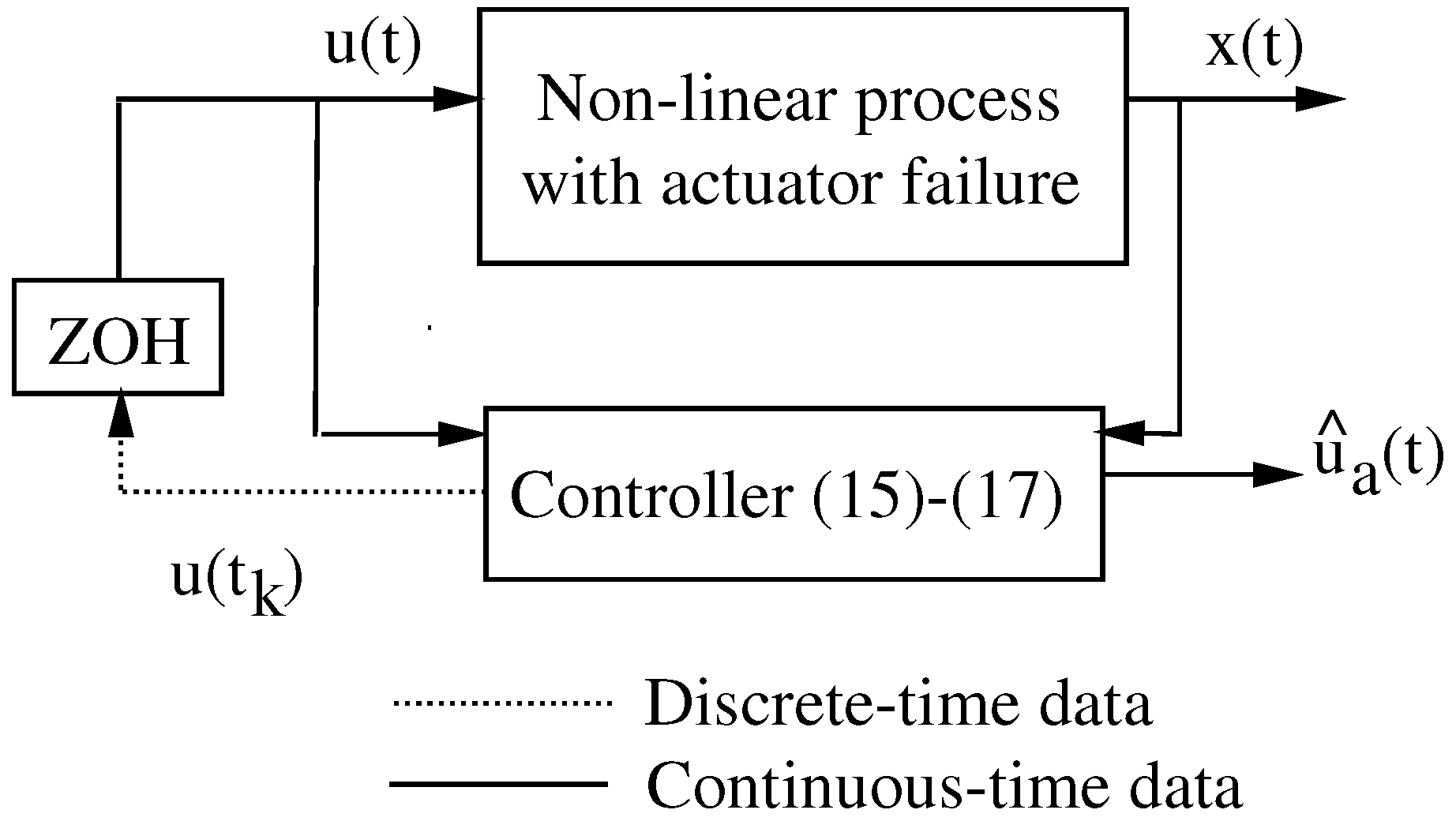
where is the sampled of at , and the sequence is an increasing one. The sampled-data control means that the value of is hold, by employing Zero-Order-Hold (ZOH) devices (for instance, Microchip Technology Inc., Chandler, AZ, USA) embedded in the digital controller (for instance, Microchip Technology Inc., Chandler, AZ, USA) , until the next event happens at . Then, the event-triggered control signal design consists of finding a sampling-rule to grant the next sample-time . In our approach, we first consider:
From the above equation, the sampled-data closed-loop system yields:
And because K is designed such that the system is a Hurwitz matrix, the above system is then Input-to-State Stable in the Lyapunov’s sense. Moreover, if is a bounded term, then the above dynamic will be a BIBO-stable system. So, from (13), it is clear that an option to design a triggered sampling rule is by employing the internal signal given by:
Based on the previous evidences, next is our main result.
Theorem 2.
Given the linear model (2) to the nonlinear system (1), the next dynamic system locally stabilizes its origin equilibrium point by using self-triggered sampled-data information:
where K is selected such that is a Hurwitz matrix, and by using the next sampling-rate rule
for some user given small positive constant δ.
Remark 1.
To observe, the controller in Theorem 2 is a non-uniform sampled-data system whereas the faulty estimation signal is expressed in continuous-time domain (See Figure 1). But, obviously, this signal can be translate into a discrete-time domain if preferable for digital-monitoring propose.
3. Numerical Experiments
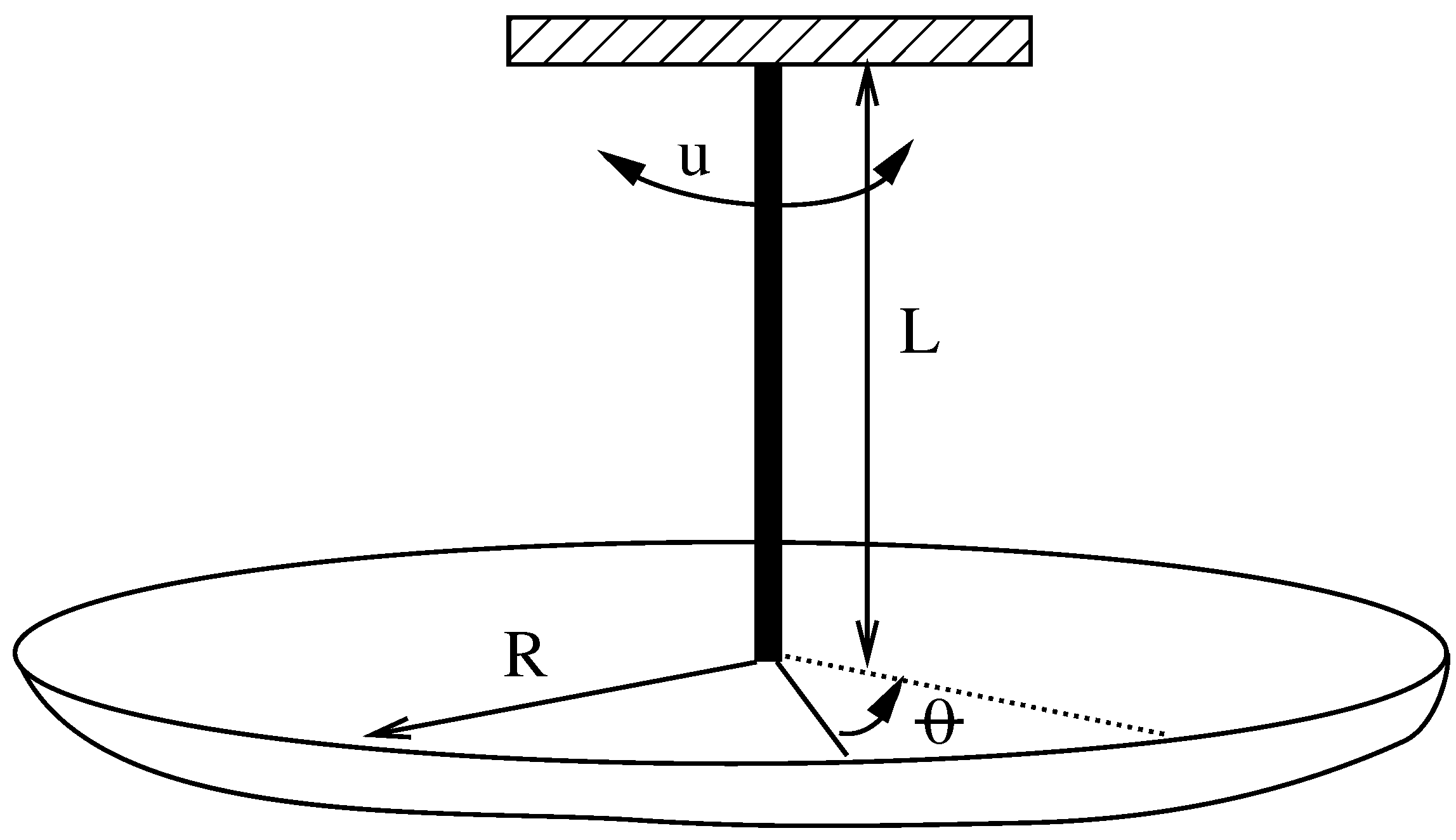
To show the performance of our control design stated in Theorem 2, consider the undamped torsional pendulum described in Figure 2, where its motion dynamic is described by the following system:
where Kg, m, kg·m, m/s being the gravitational acceleration [17]; and and are the angular and angular velocity of the system state. To go on, we use the next actuator failure model [17]:
The next internal control law satisfies the Theorem 1 assumptions:
where ; and hence, the linear model around the origin equilibrium point of the system (19) yields (the un-faulty case) :
To complete our design by following Theorem 2 demand, we employ:
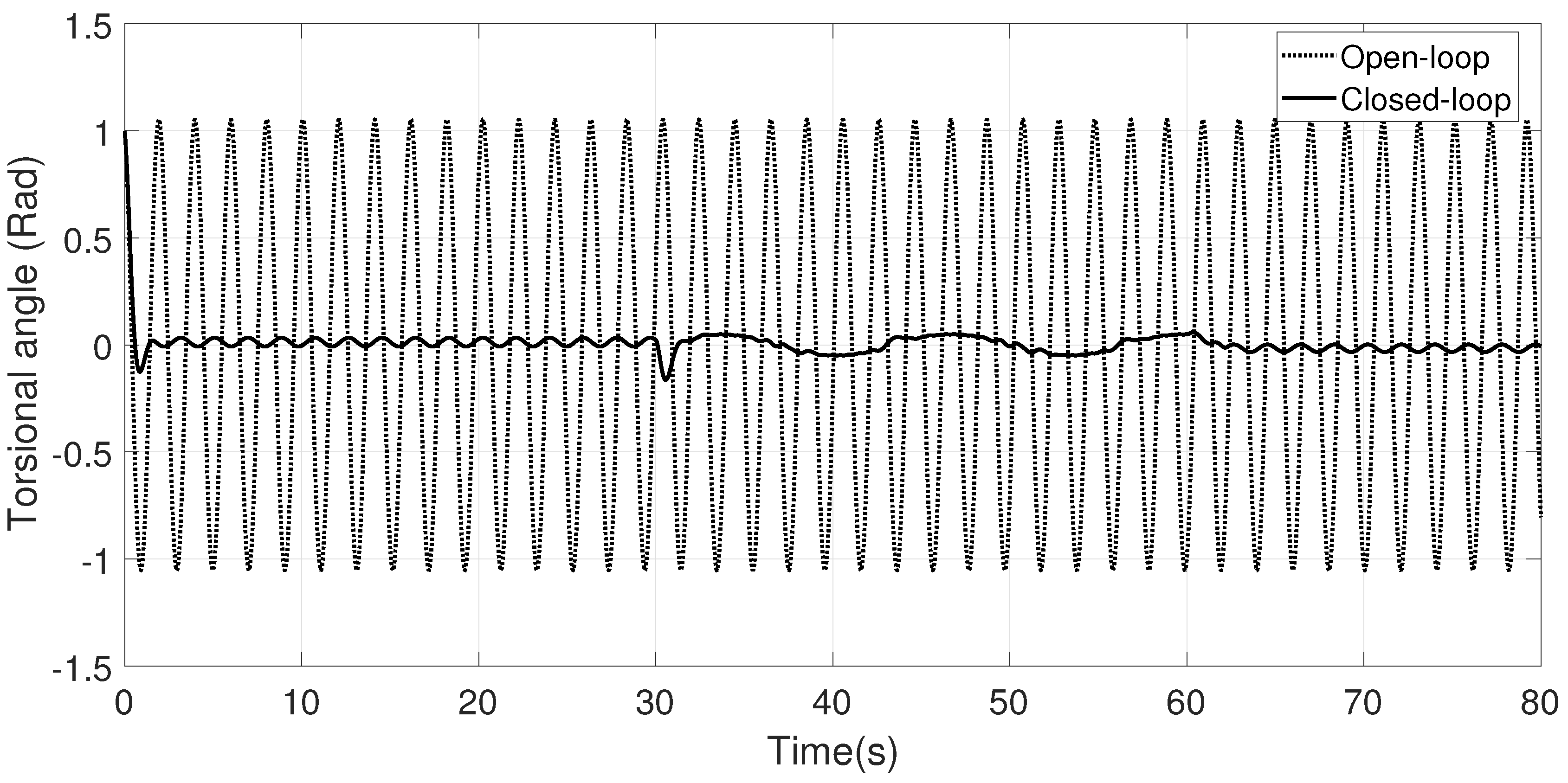
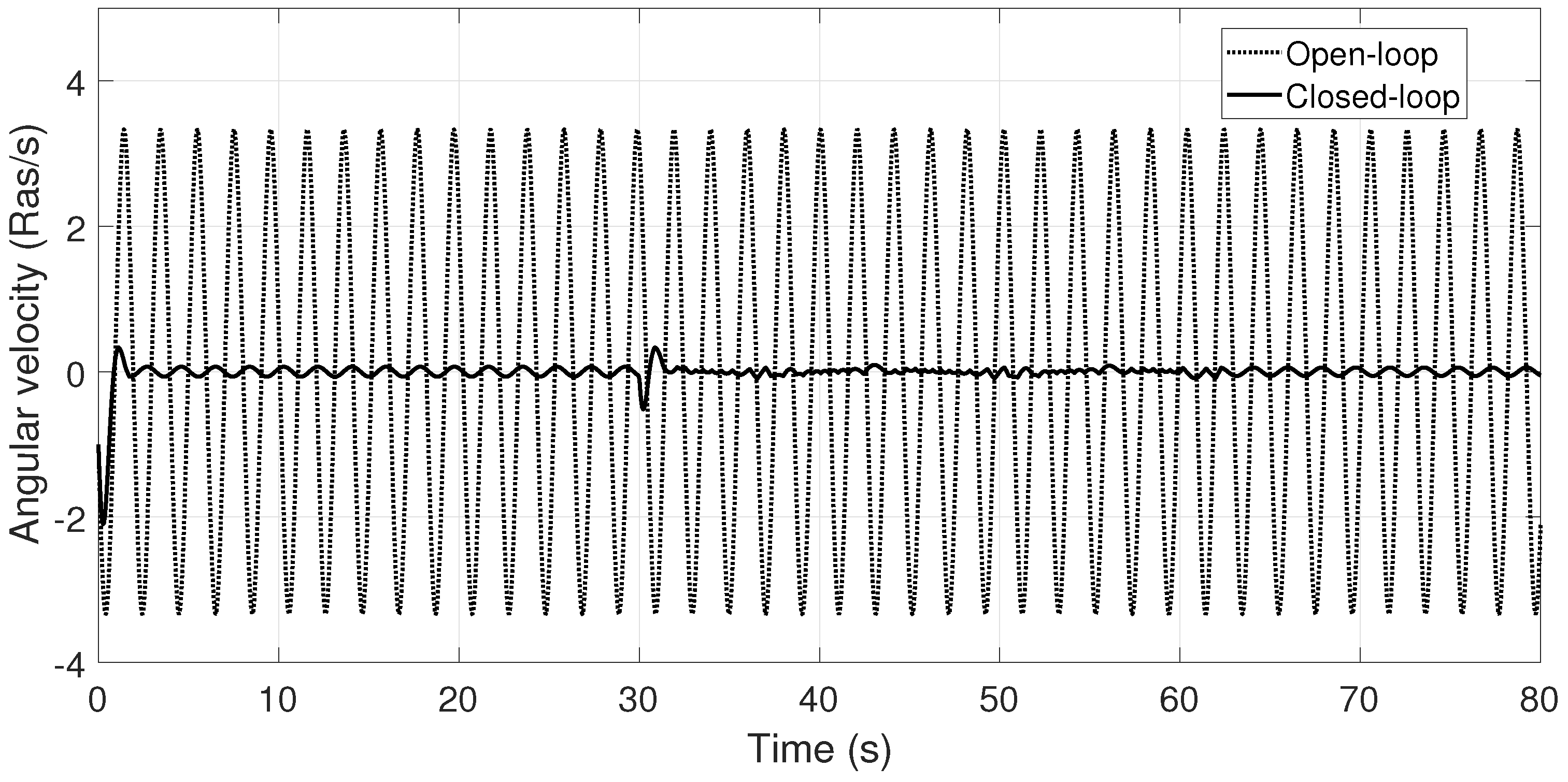
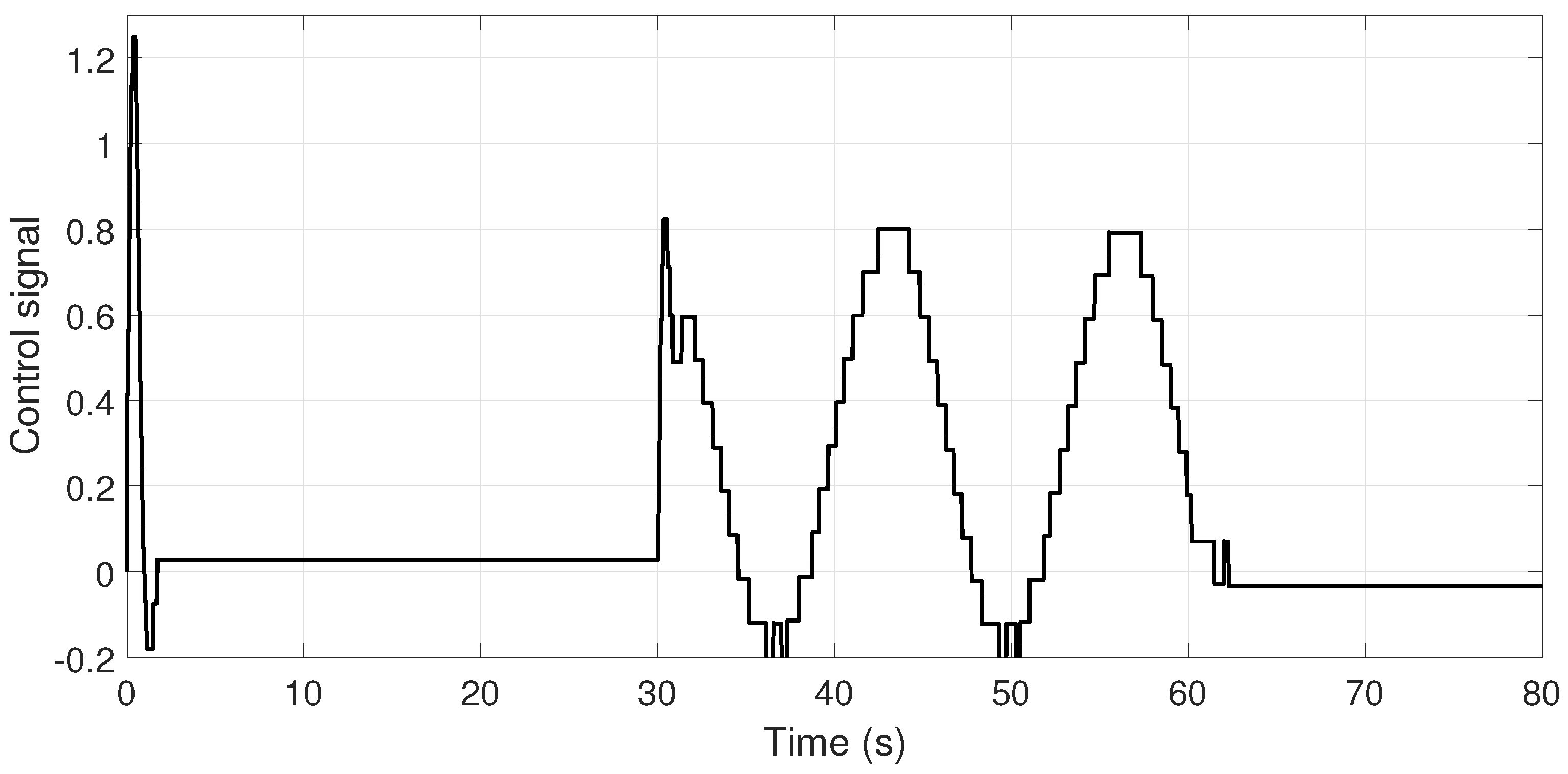
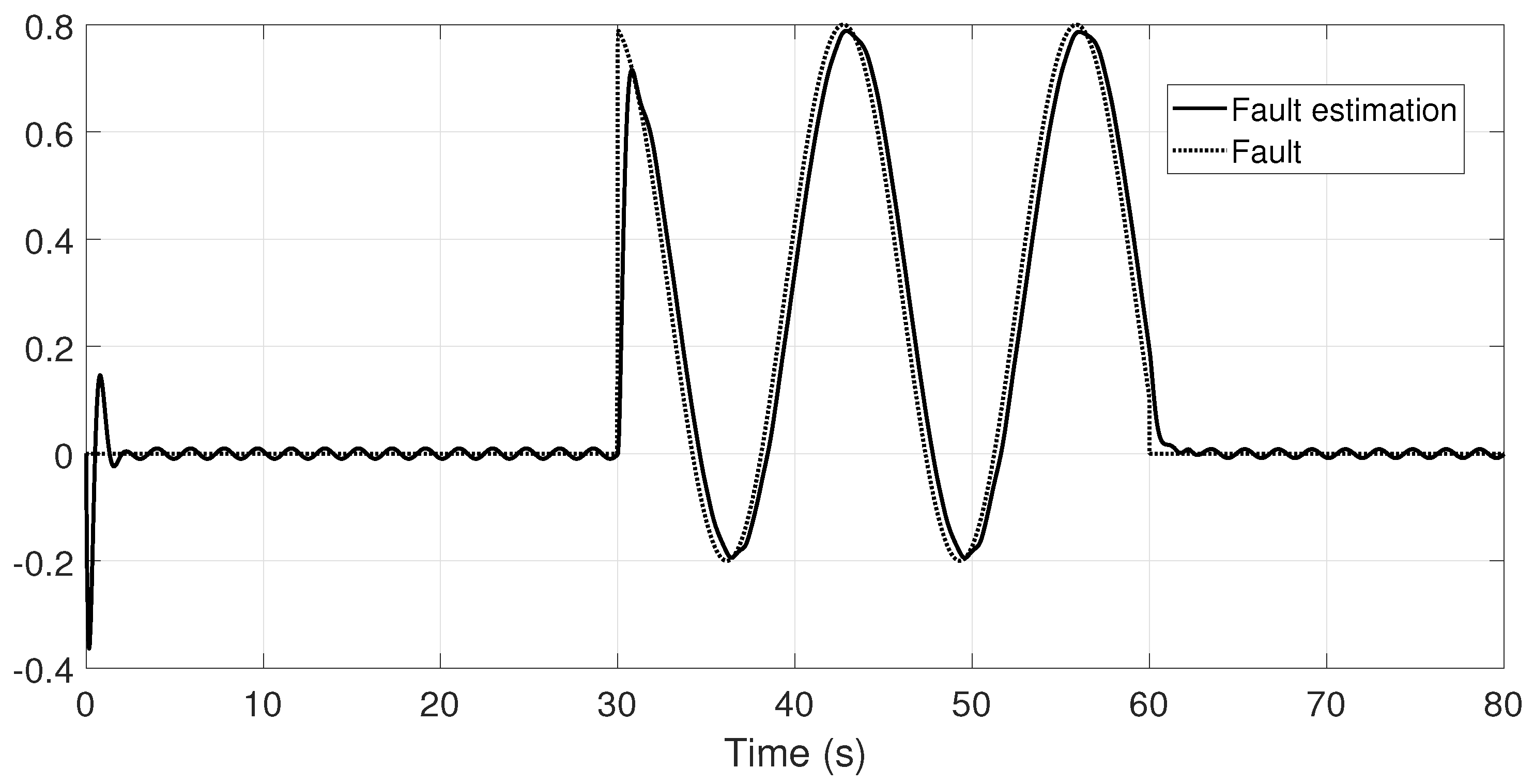
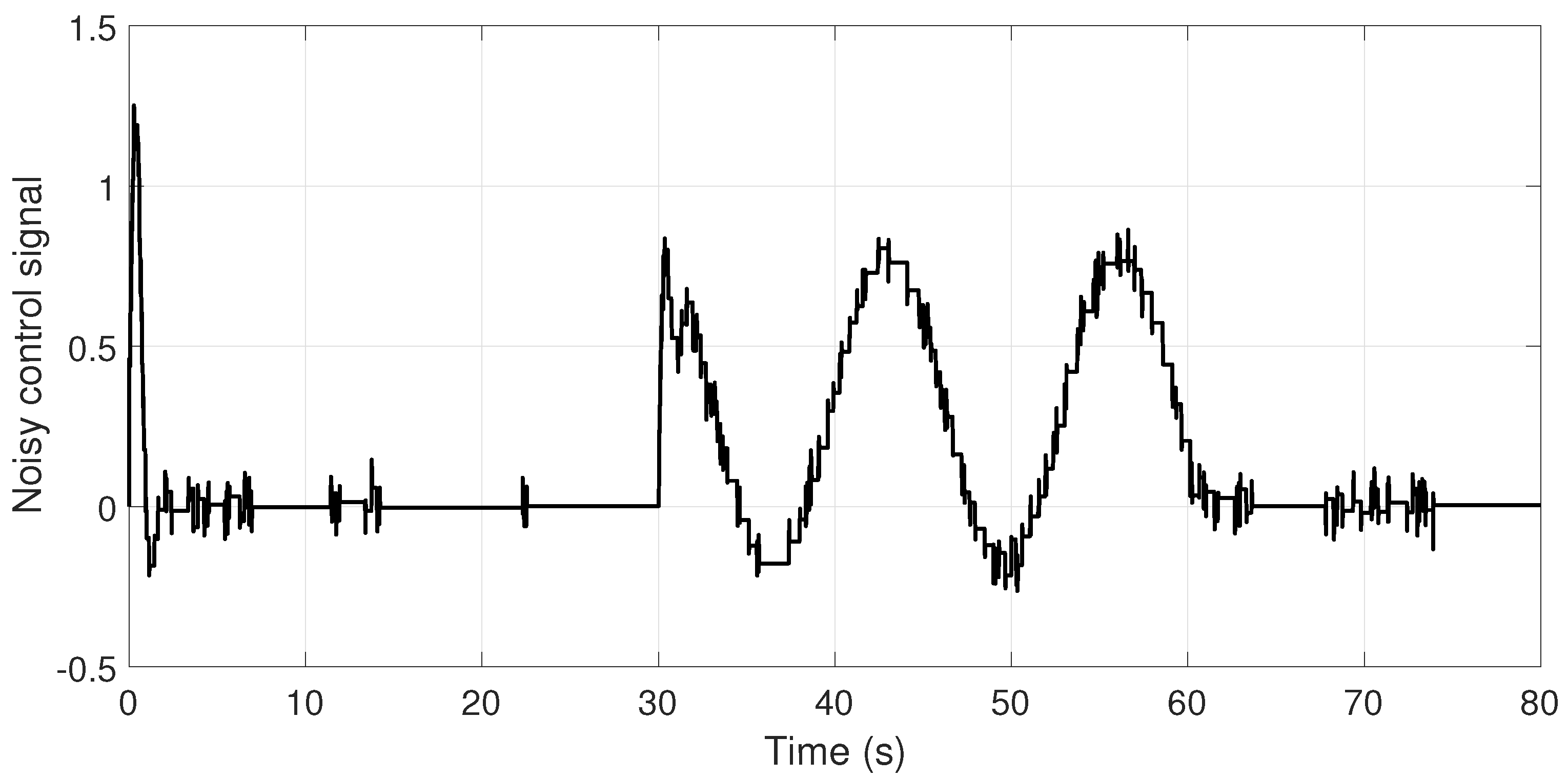
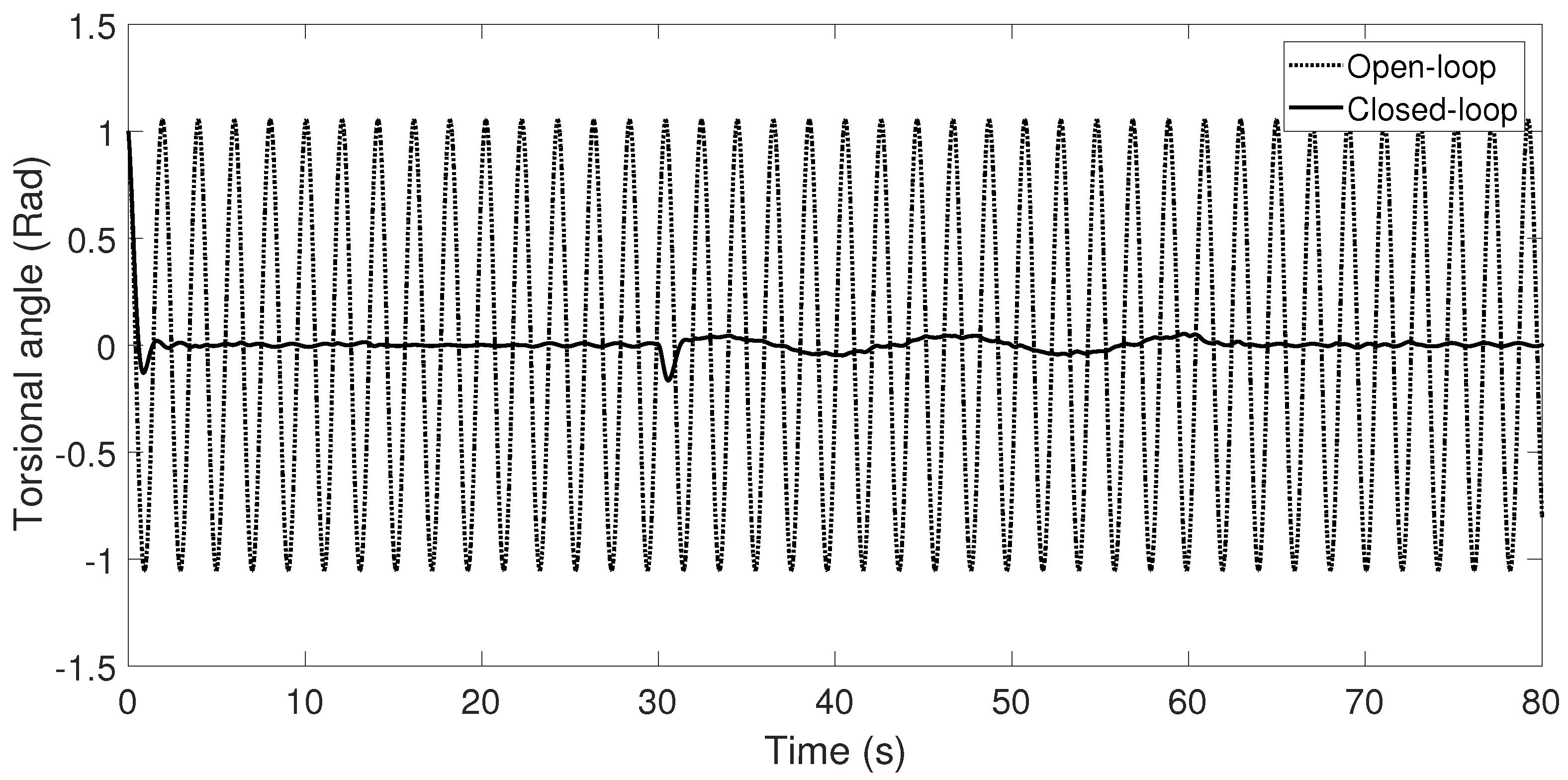
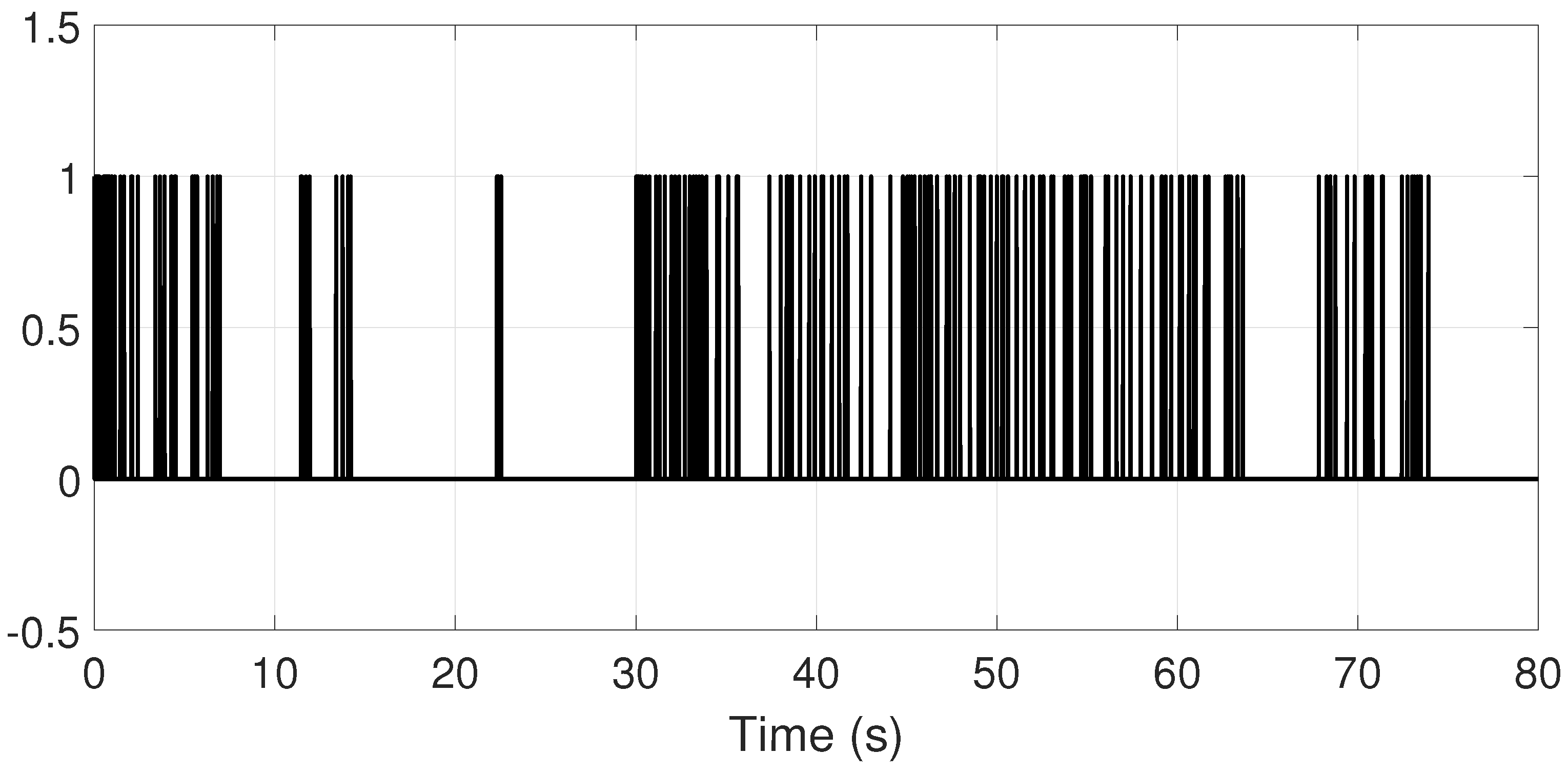
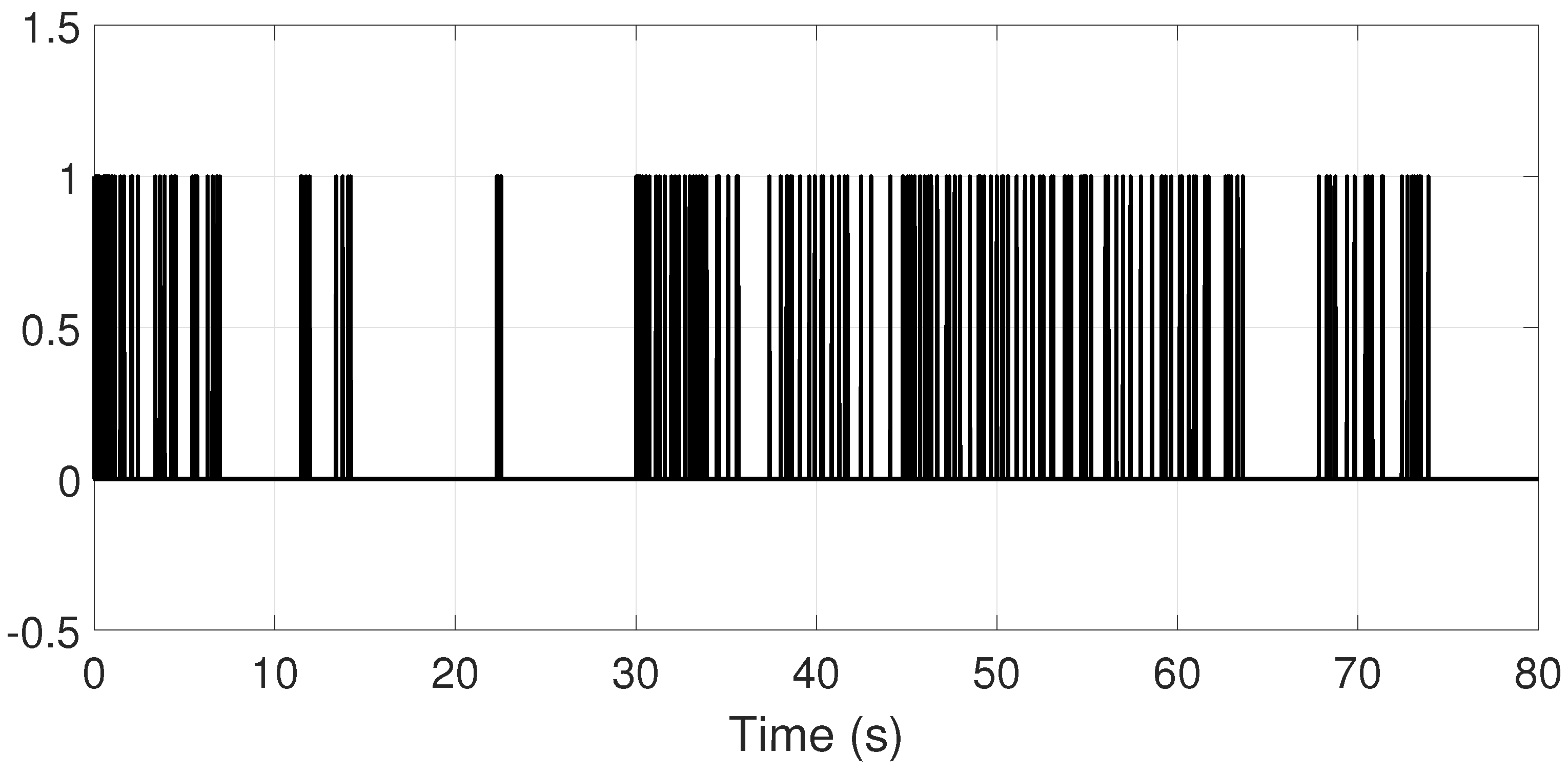
, and . The used initial conditions are , , and the rest ones are set to zero. Then, the obtained controller is applied to the nonlinear system (19) and (20). The numerical experiment results are shown in Figure 3, Figure 4, Figure 5, Figure 6, Figure 7 and Figure 8. The last two ones correspond to the noisy case when the measurable data are corrupted by a normal Gaussian noise with mean zero and variance . From these figures, we may appreciate an acceptable performance of our self-sampled-data control algorithm design in comparison to the unstable, in the Lyapunov’s sense, response case. Lastly, to evidence the un-uniform sampling-rate for sampled-data generation, Figure 9 shows the sampling-instants for the noisy case.
Finally, and from the modeling point of view, a sample-and-hold device can be modeled by using a filter dynamic with a "stop-and-go" programming logic, as follows (see details, for instance, in [21,22]):
where is the time-constant of the filter and is a non-uniform square signal taking values from the set . In this way, when , the solution in (23) is hold (the filter dynamic is stopped) to the last value of until , where then will on time follow the signal (the filter dynamic is released). It is clear that if is sufficiently large, and the square signal is too narrow when , the above dynamic is a kind of an ideal sampled-and-hold mechanism. In fact, and from the circuit point of view, the real sample-and-hold devices use a capacitor which is charged to the sampled value of the signal , then requiring a constant-time for charging (equivalent to our case). We use the above ZOH-model system in our numerical experiment realization.
4. Conclusions
In this paper, we have proposed a self-triggered sampled-data control to nonlinear systems with actuator faults. We realized it by implementing an event-triggered sampling rate by using the linear model of the plant and by also incorporating an actuator compensator via a fault observer design. According to numerical experiments applied to a non-damping torsional pendulum, our design has an acceptable performance. On the other hand, nowadays, the design novel torque control to wind turbines with actuator failures is an open research topic [23,24]. Moreover, a wind turbine torque control followed by the shaft generator mechanism resembles to a torsional pendulum. Hence, as a future work consists of implementing this theory to control of wind turbines. Finally, our design only needs to monitor the input-output of the process and does not require extra analog hardware for implementation.
Acknowledgments
This work was partially supported by the Spanish Ministry of Economy, Industry and Competitiveness under grants DPI2015 - 64170 - R (MINECO/FEDER).
Author Contributions
Leonardo Acho and Pablo Buenestado contributed equally to this work.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhang, J.; Feng, G. Event-driven observer-based output feedback control for linear systems. Automatica 2014, 50, 1852–1859. [Google Scholar] [CrossRef]
- Fan, Q.Y.; Yang, G.H. Sampled-data output feedback control based on a new event-triggered control scheme. Inf. Sci. 2017, 414, 306–318. [Google Scholar] [CrossRef]
- Yu, H.; Hao, F. Adaptive model-based event-triggered control for linear systems. In Proceedings of the IEEE 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 6630–6635. [Google Scholar]
- Hu, S.; Yue, D. L2-Gain analysis of event-triggered networked control systems: A discontinuous Lyapunov functional approach. Int. J. Robust Nonlinear Control 2013, 23, 1277–1300. [Google Scholar] [CrossRef]
- Tabuada, P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control 2007, 52, 1680–1685. [Google Scholar] [CrossRef]
- Naghshtabrizi, P.; Hespanha, J.P.; Teel, A.R. Exponential stability of impulsive systems with application to uncertain sampled-data systems. Syst. Control Lett. 2008, 57, 378–385. [Google Scholar] [CrossRef]
- Hu, L.S.; Cao, Y.Y.; Shao, H.H. Constrained robust sampled-data control for nonlinear uncertain systems. Int. J. Robust Nonlinear Control 2002, 12, 447–464. [Google Scholar] [CrossRef]
- Phillips, C.L.; Nagle, H.T. Digital Control System Analysis and Design; Prentice Hall Press: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Landau, I.D.; Zito, G. Digital Control Systems: Design, Identification and Implementation; Springer: Berlin, Germany, 2005. [Google Scholar]
- Briat, C. Linear Parameter-Varying and Time-Delay Systems. Analysis, Observation, Filtering & Control; Springer: Berlin/Heidelberg, Germany, 2014; Volume 3. [Google Scholar]
- Vamvoudakis, K.G. Event-Triggered Optimal Adaptive Control Algorithm for Continuous-Time Nonlinear Systems. IEEE/CAA J. Autom. Sin. 2014, 1, 282–293. [Google Scholar]
- Girard, A. Dynamic triggering mechanisms for event-triggered control. IEEE Trans. Autom. Control 2015, 60, 1992–1997. [Google Scholar] [CrossRef]
- Jiang, Z.; Cui, B.; Wu, W.; Zhuang, B. Event-driven observer-based control for distributed parameter systems using mobile sensor and actuator. Comput. Math. Appl. 2016, 72, 2854–2864. [Google Scholar] [CrossRef]
- Ni, W.; Zhao, P.; Wang, X.; Wang, J. Event-triggered Control of Linear Systems with Saturated Inputs. Asian J. Control 2015, 17, 1196–1208. [Google Scholar] [CrossRef]
- Behera, A.K.; Bandyopadhyay, B. Self-triggering-based sliding-mode control for linear systems. IET Control Theory Appl. 2015, 9, 2541–2547. [Google Scholar] [CrossRef]
- Wei, B.; Xiao, F. Event-triggered control for synchronization of coupled harmonic oscillators. Syst. Control Lett. 2016, 97, 163–168. [Google Scholar] [CrossRef]
- Zhao, B.; Liu, D.; Li, Y. Observer based adaptive dynamic programming for fault tolerant control of a class of nonlinear systems. Inf. Sci. 2017, 384, 21–33. [Google Scholar] [CrossRef]
- Abbaspour, A.; Aboutalebi, P.; Yen, K.K.; Sargolzaei, A. Neural adaptive observer-based sensor and actuator fault detection in nonlinear systems: Application in UAV. ISA Trans. 2017, 67, 317–329. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Daley, S. Actuator fault diagnosis: An adaptive observer-based technique. IEEE Trans. Autom. Control 1996, 41, 1073–1078. [Google Scholar] [CrossRef]
- Viola, F.; Gallaire, F. The viscous torsional pendulum. J. Fluids Struct. 2017, 72, 25–37. [Google Scholar] [CrossRef]
- Orlov, Y.; Acho, L. Nonlinear H∞-control of time-varying systems: A unified distribution-based formalism for continuous and sampled-data measurement feedback design. IEEE Trans. Autom. Control 2001, 46, 638–643. [Google Scholar] [CrossRef]
- Vidal, Y.; Acho, L.; Luo, N.; Tutiven, C. Hardware in the loop wind turbine simulator for control system testing. In Wind Turbine Control and Monitoring; Luo, N., Vidal, Y., Acho, L., Eds.; Springer: Berlin, Germany, 2014; pp. 449–466. [Google Scholar]
- Luo, N.; Vidal, Y.; Acho, L. Wind Turbine Control and Monitoring; Luo, N., Vidal, Y., Acho, L., Eds.; Springer: Berlin, Germany, 2014. [Google Scholar]
- Vidal, Y.; Tutivén, C.; Rodellar, J.; Acho, L. Fault diagnosis and fault-tolerant control of wind turbines via a discrete time controller with a disturbance compensator. Energies 2015, 8, 4300–4316. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Schematic representation of the closed-loop system by using the Theorem 2 controller system.
Figure 1.
Schematic representation of the closed-loop system by using the Theorem 2 controller system.
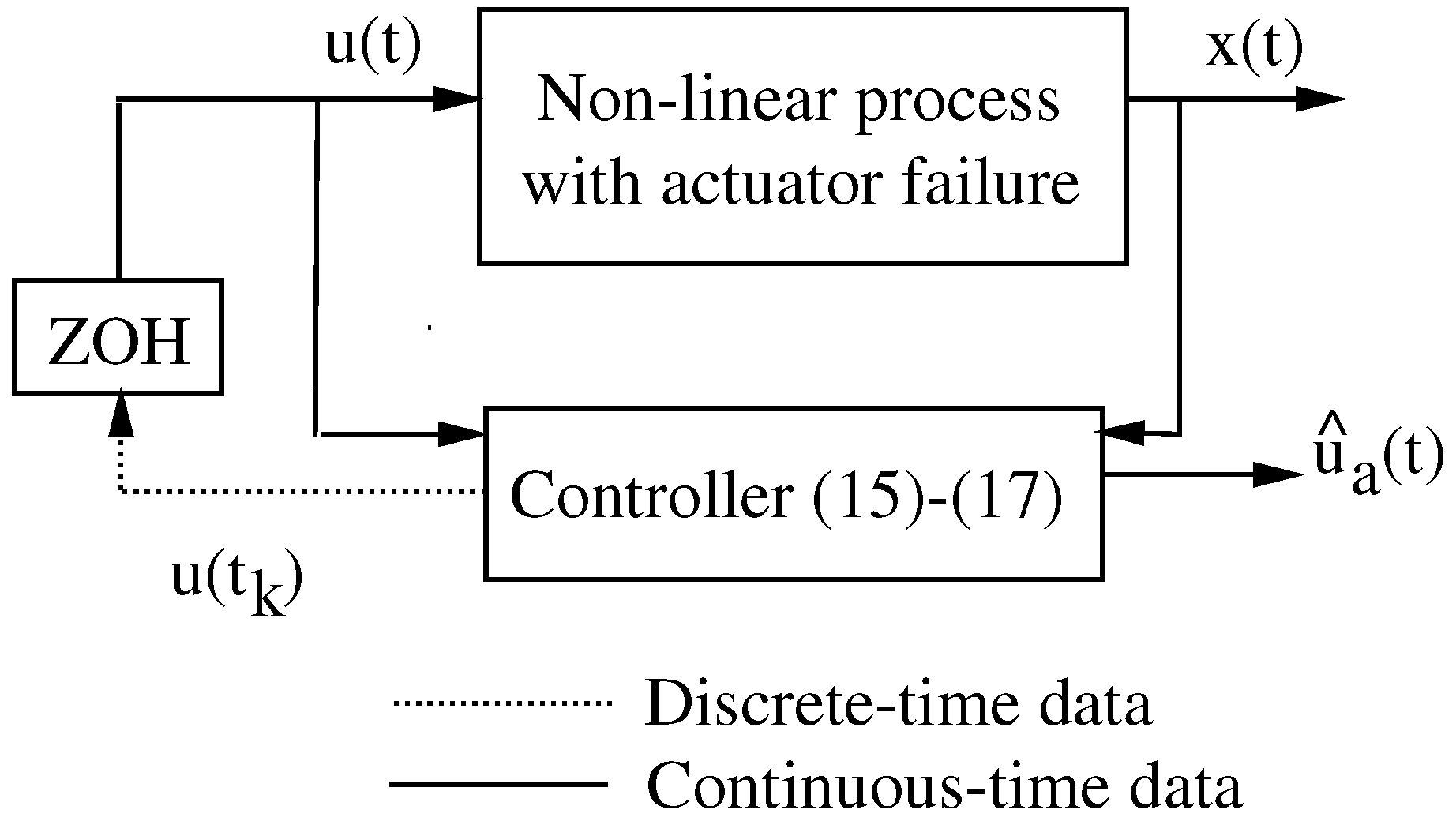
Figure 2.
The undamped torsional pendulum.
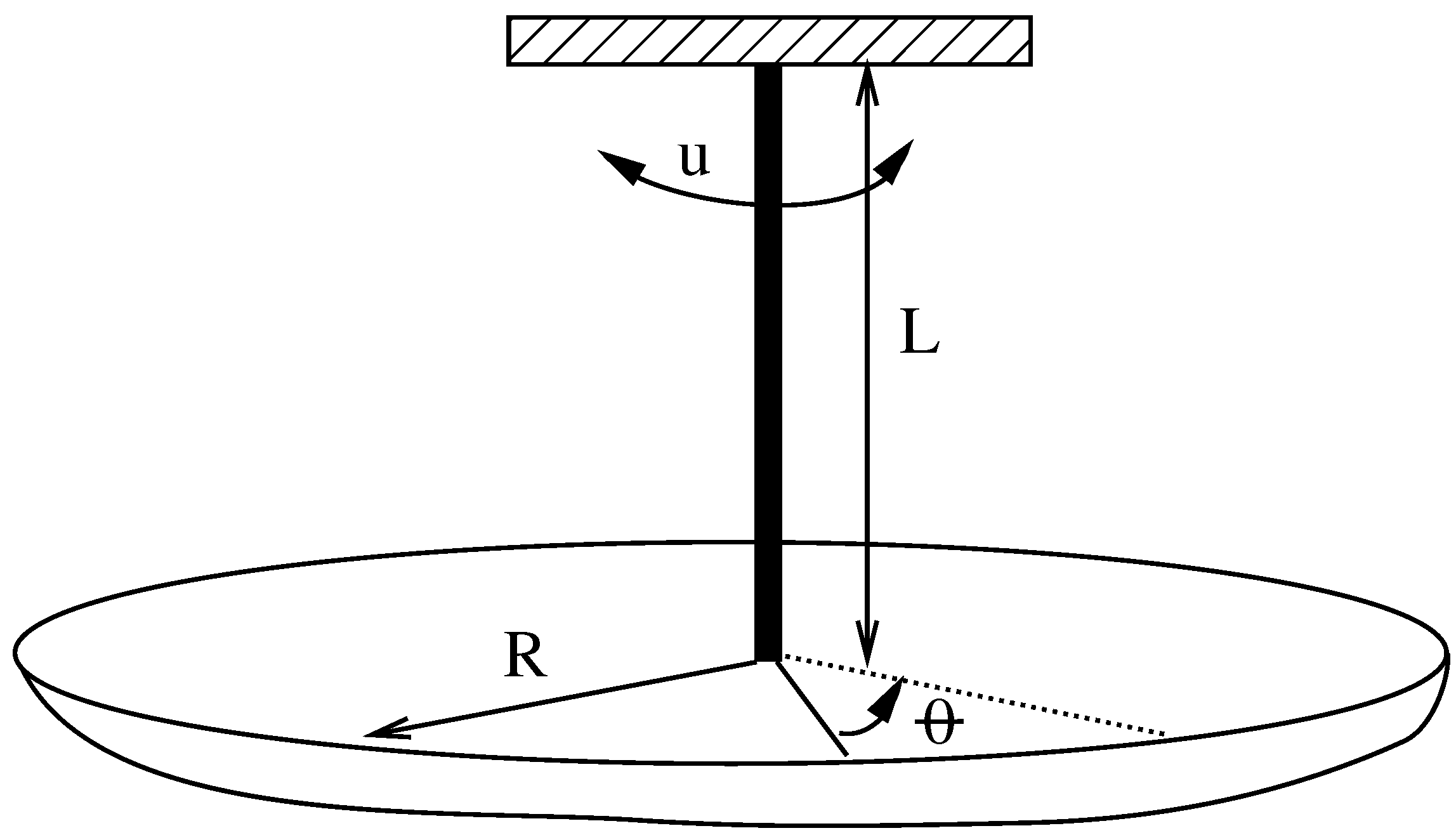
Figure 3.
Numerical experiments: Torsional angle response.
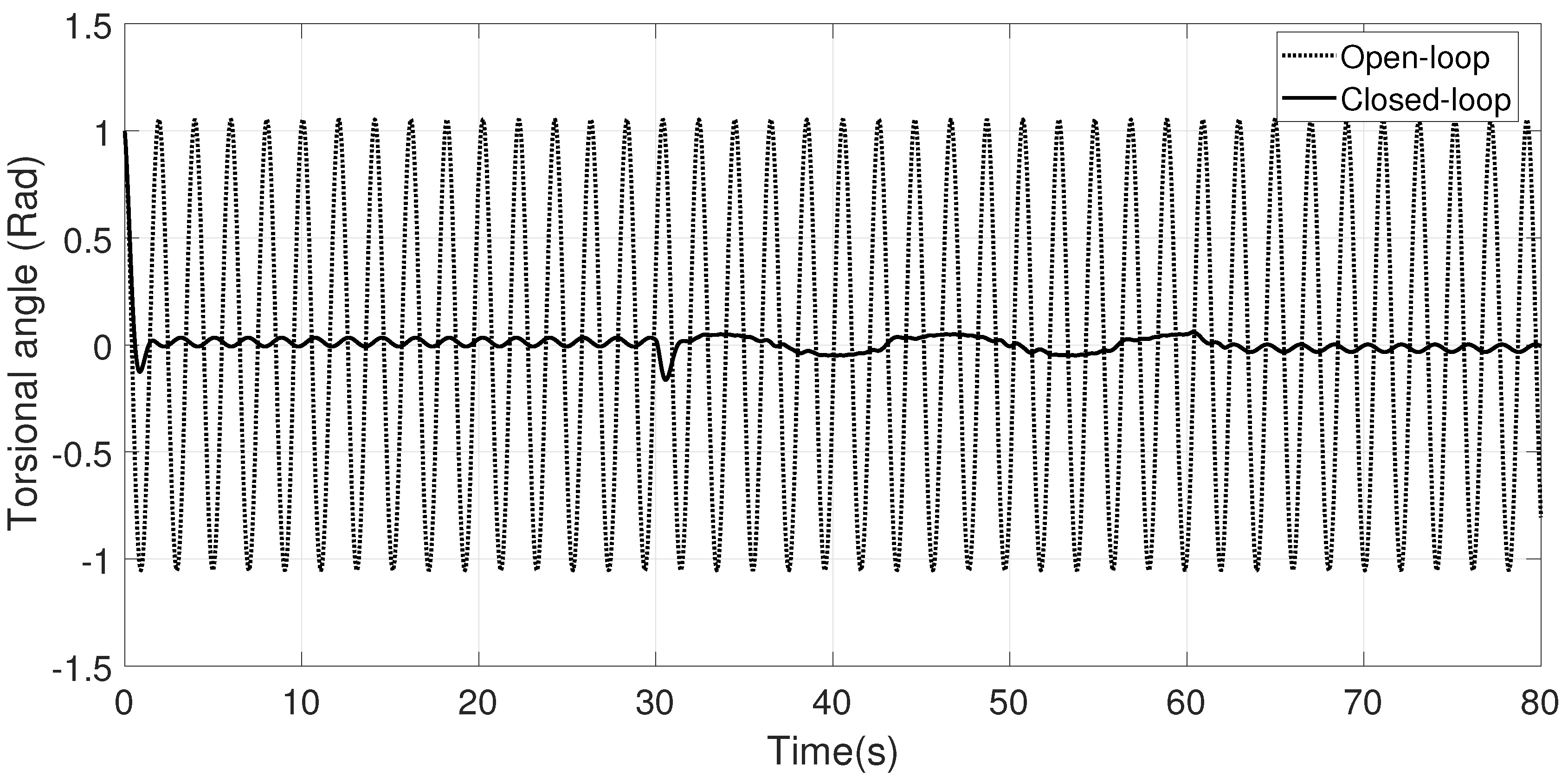
Figure 4.
Numerical experiments: Angular velocity response.
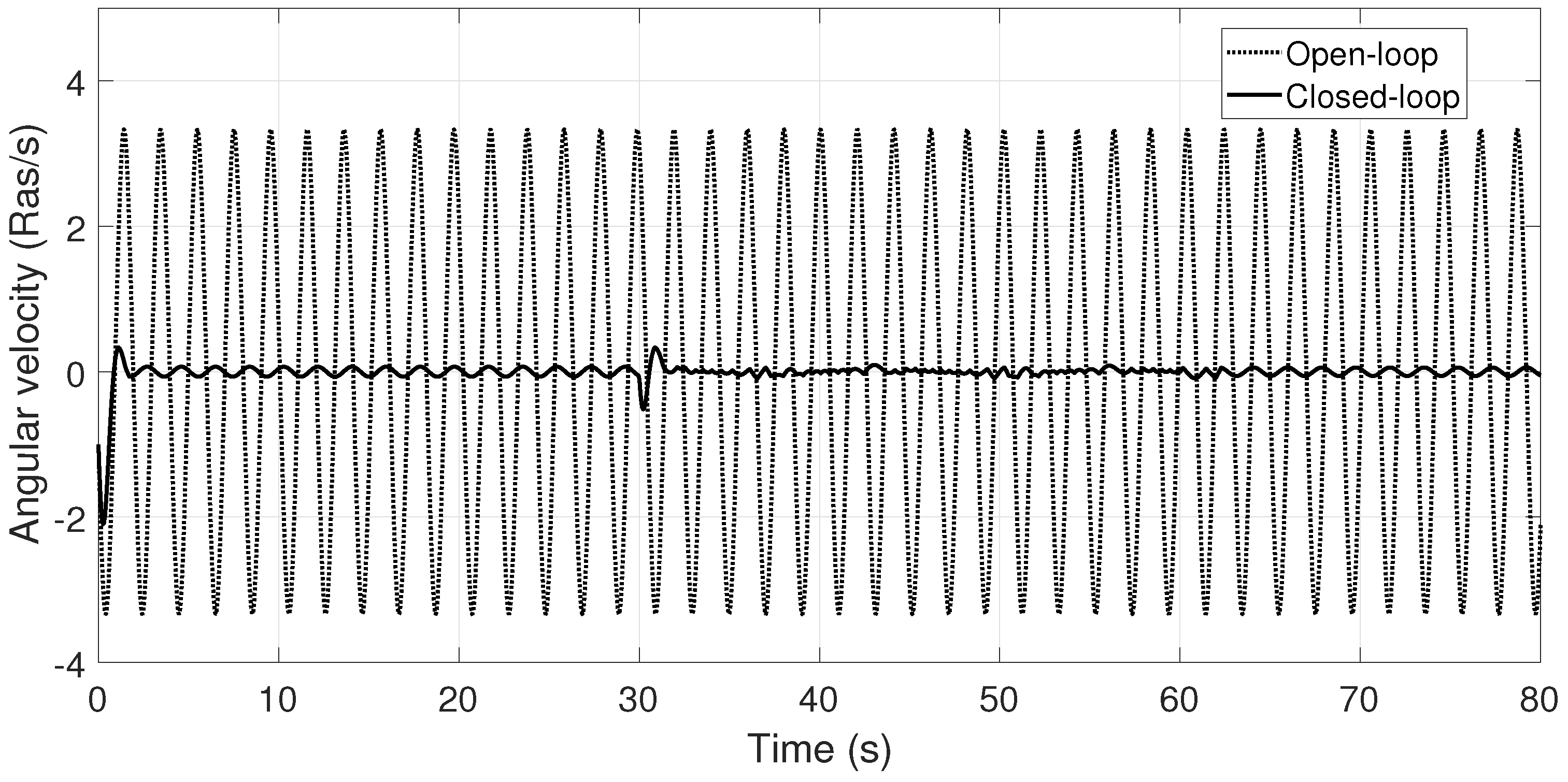
Figure 5.
Numerical experiments: Control law signal.
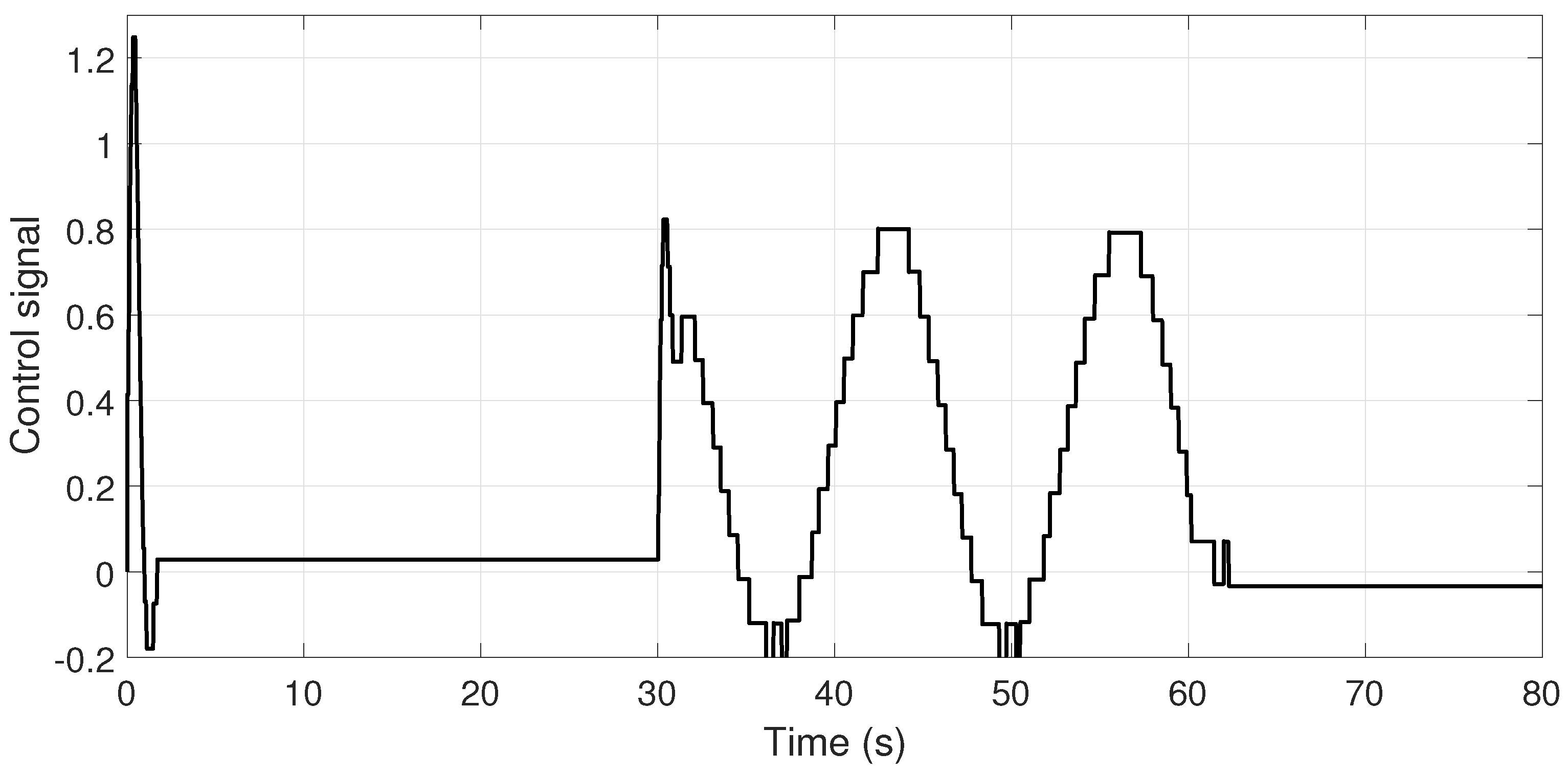
Figure 6.
Numerical experiments: Fault estimation and the true actuator fault.
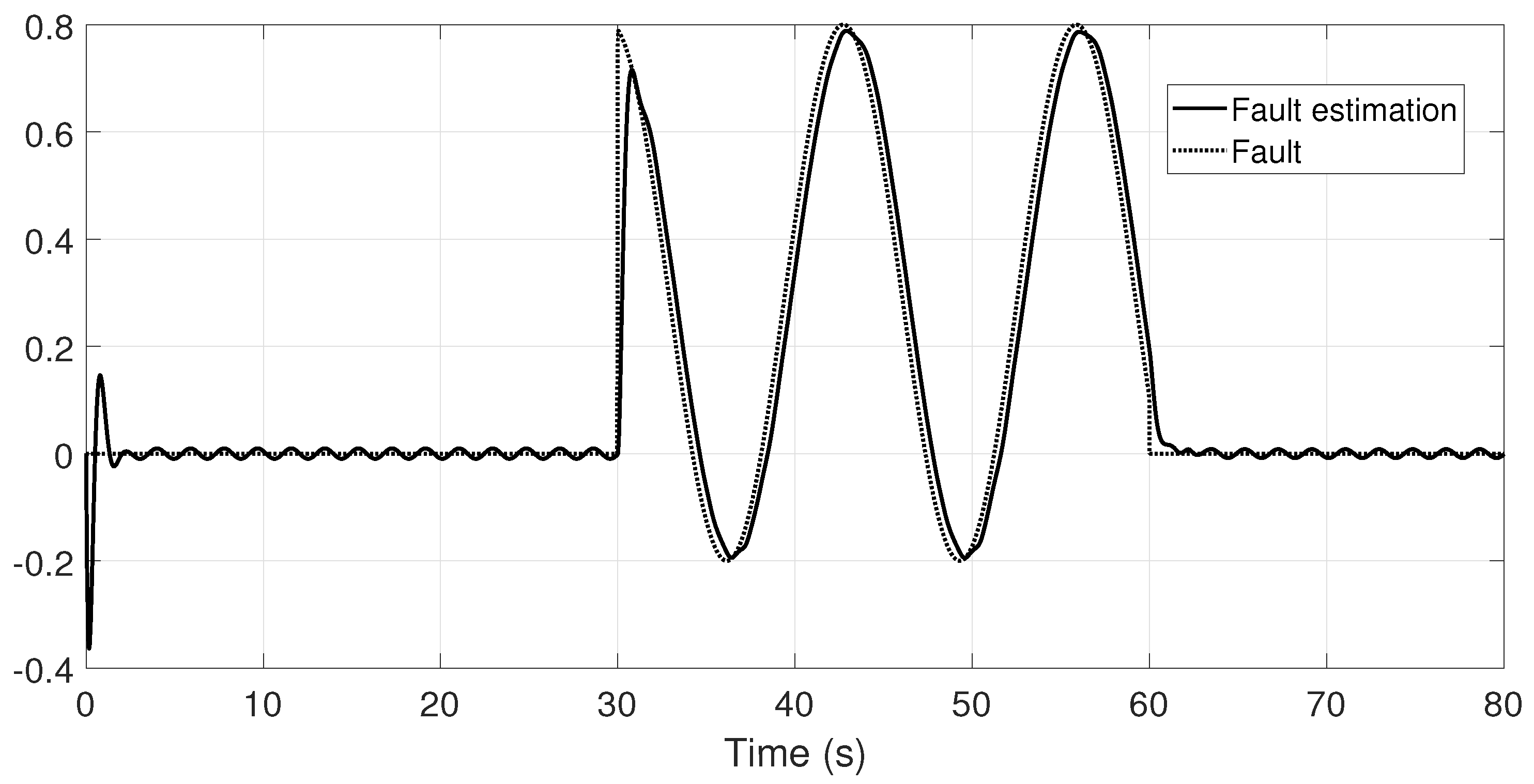
Figure 7.
Numerical experiments: Noisy control signal.
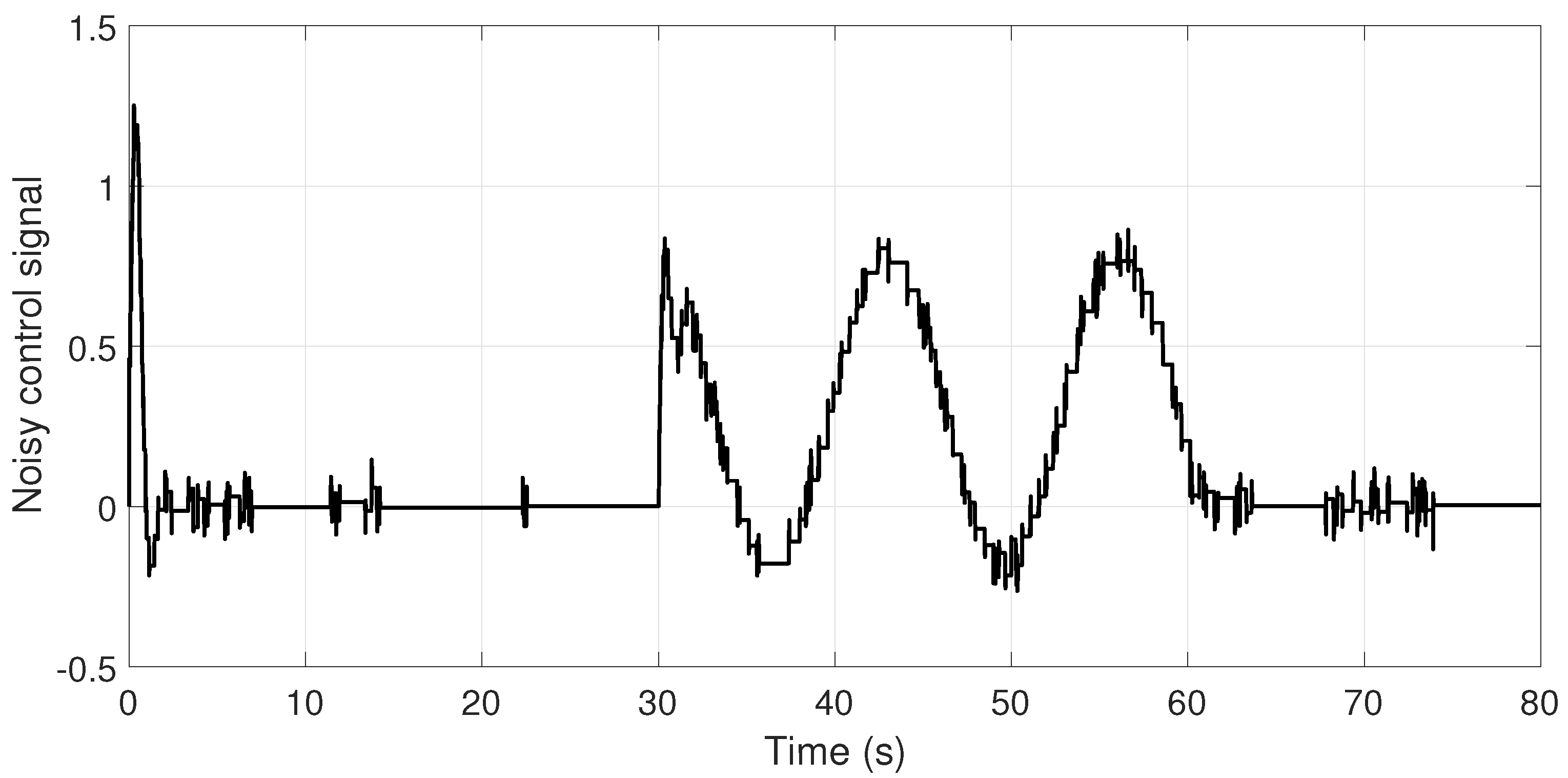
Figure 8.
Numerical experiments: torsional angle response for the noisy case.
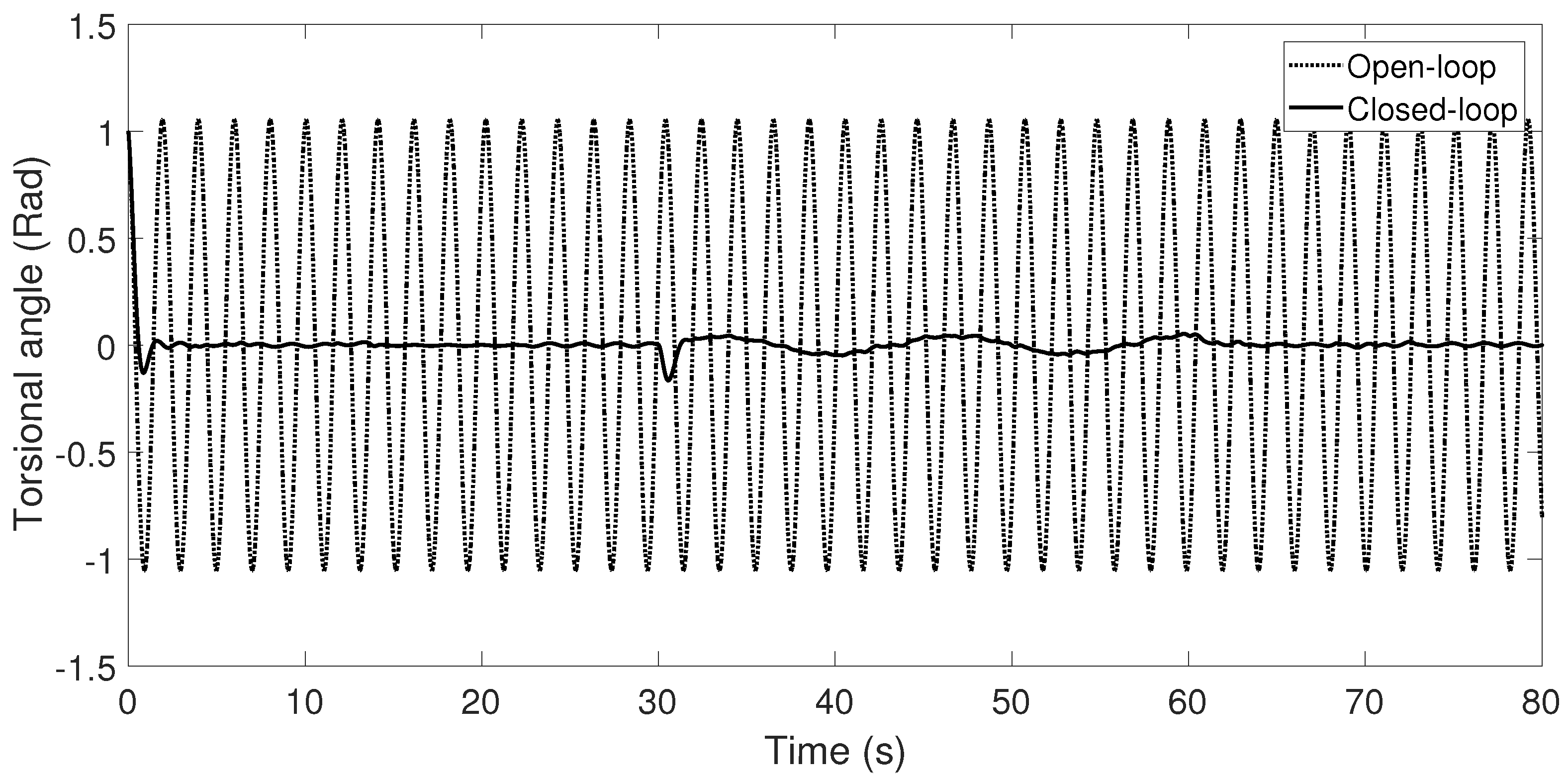
Figure 9.
Numerical experiment results: sampling-instants for the noisy scenario.
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Acho, L.; Buenestado, P. A Robust Asynchronous Sampled-Data Control Design for Nonlinear Systems with Actuator Failures. Appl. Sci. 2017, 7, 875. https://doi.org/10.3390/app7090875
AMA Style
Acho L, Buenestado P. A Robust Asynchronous Sampled-Data Control Design for Nonlinear Systems with Actuator Failures. Applied Sciences. 2017; 7(9):875. https://doi.org/10.3390/app7090875
Chicago/Turabian StyleAcho, Leonardo, and Pablo Buenestado. 2017. "A Robust Asynchronous Sampled-Data Control Design for Nonlinear Systems with Actuator Failures" Applied Sciences 7, no. 9: 875. https://doi.org/10.3390/app7090875
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.