Maximum Power Point Tracking Implementation by Dspace Controller Integrated Through Z-Source Inverter Using Particle Swarm Optimization Technique for Photovoltaic Applications

 ,
,  ,
,
Abstract
:1. Introduction
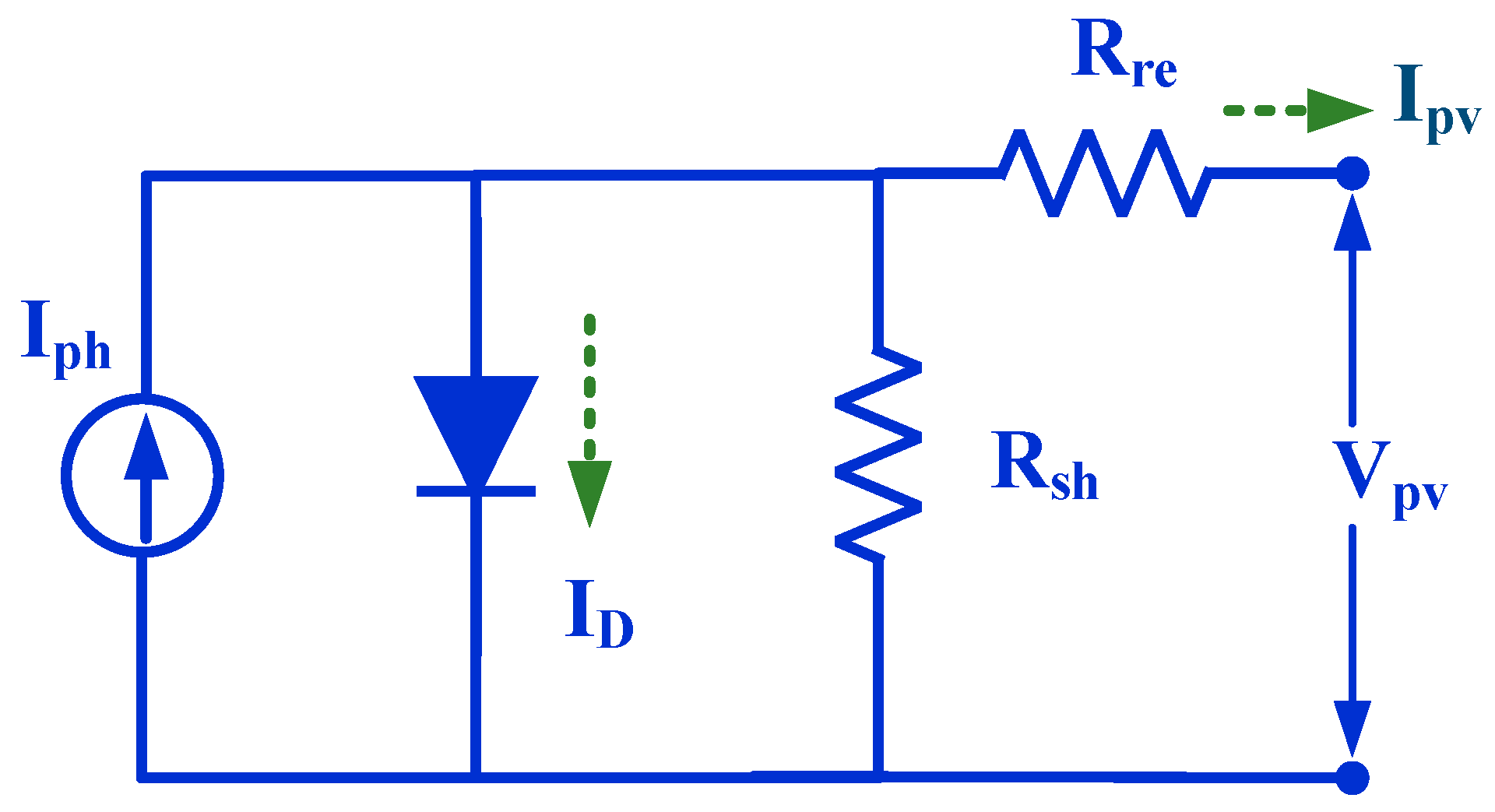
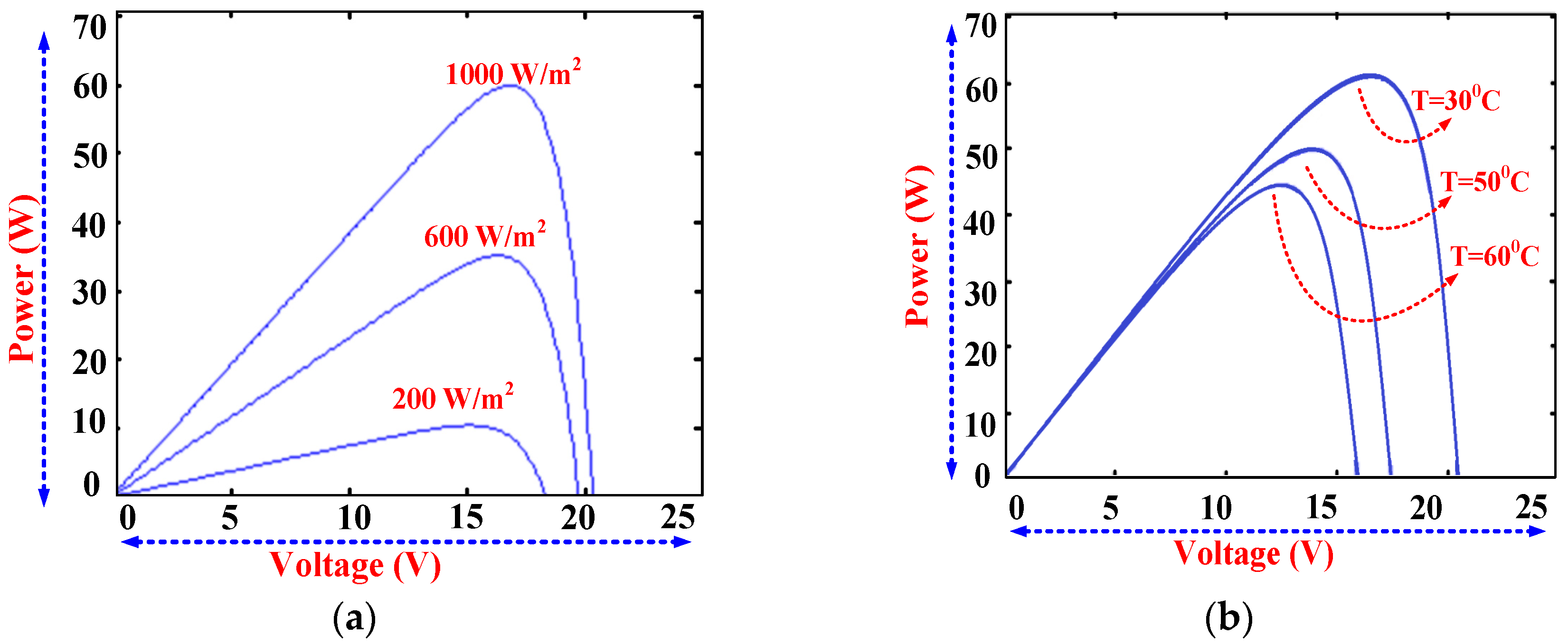
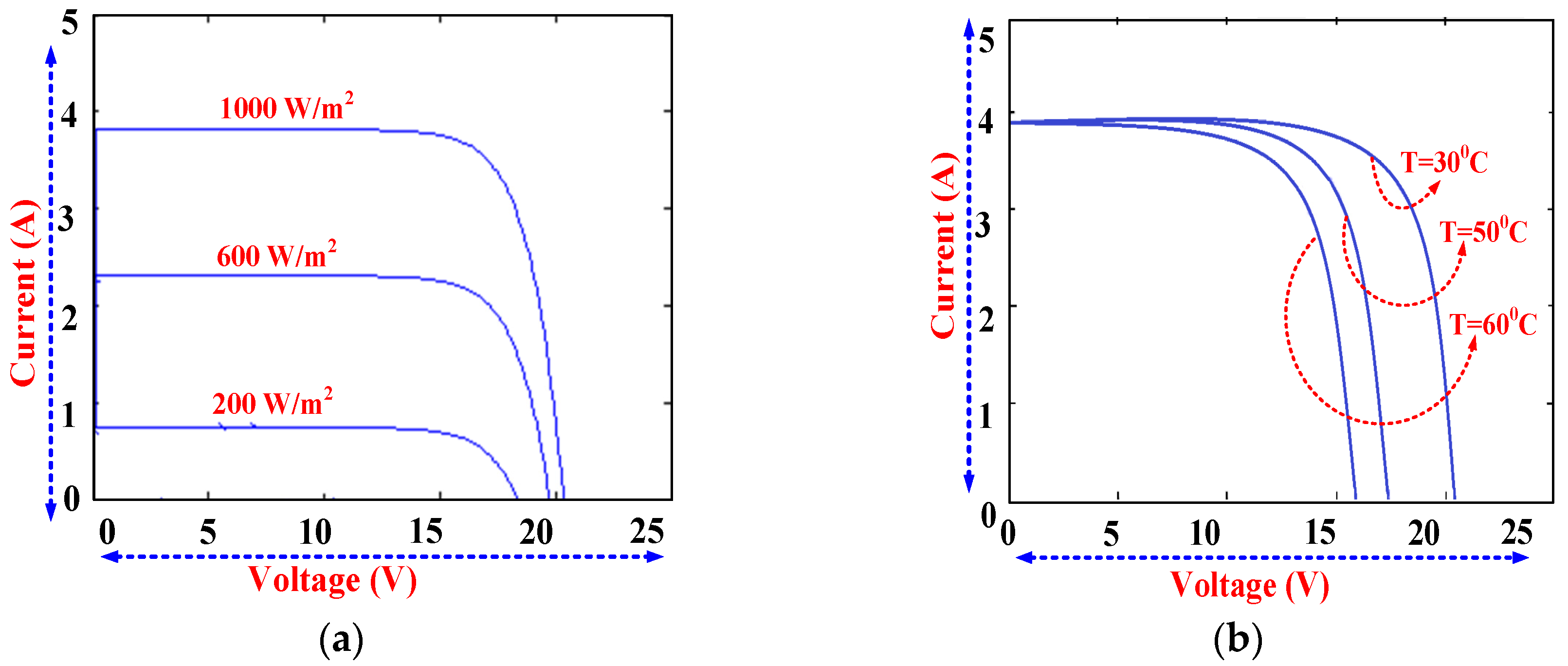
2. Modeling of PV Module
3. Classification of MPPT
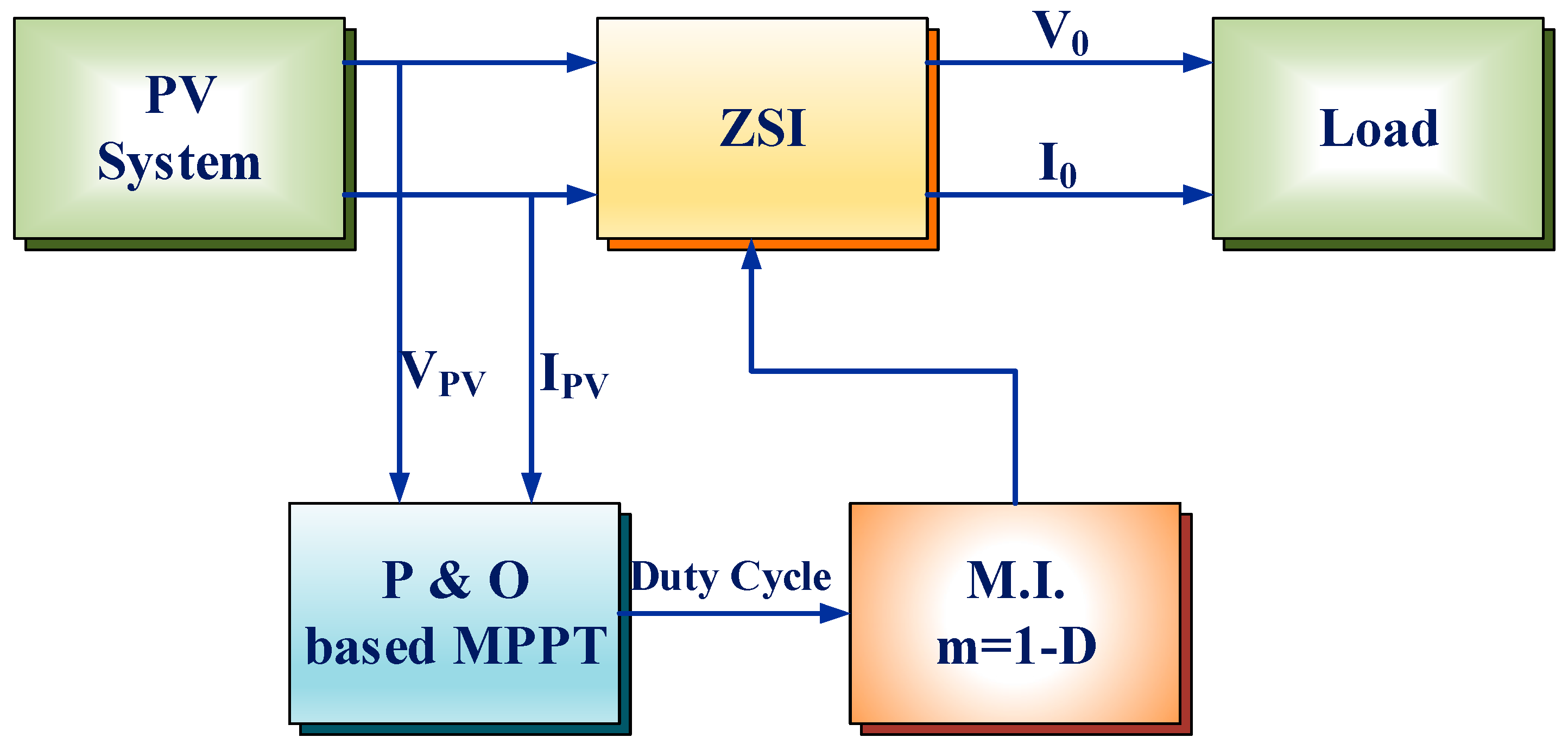
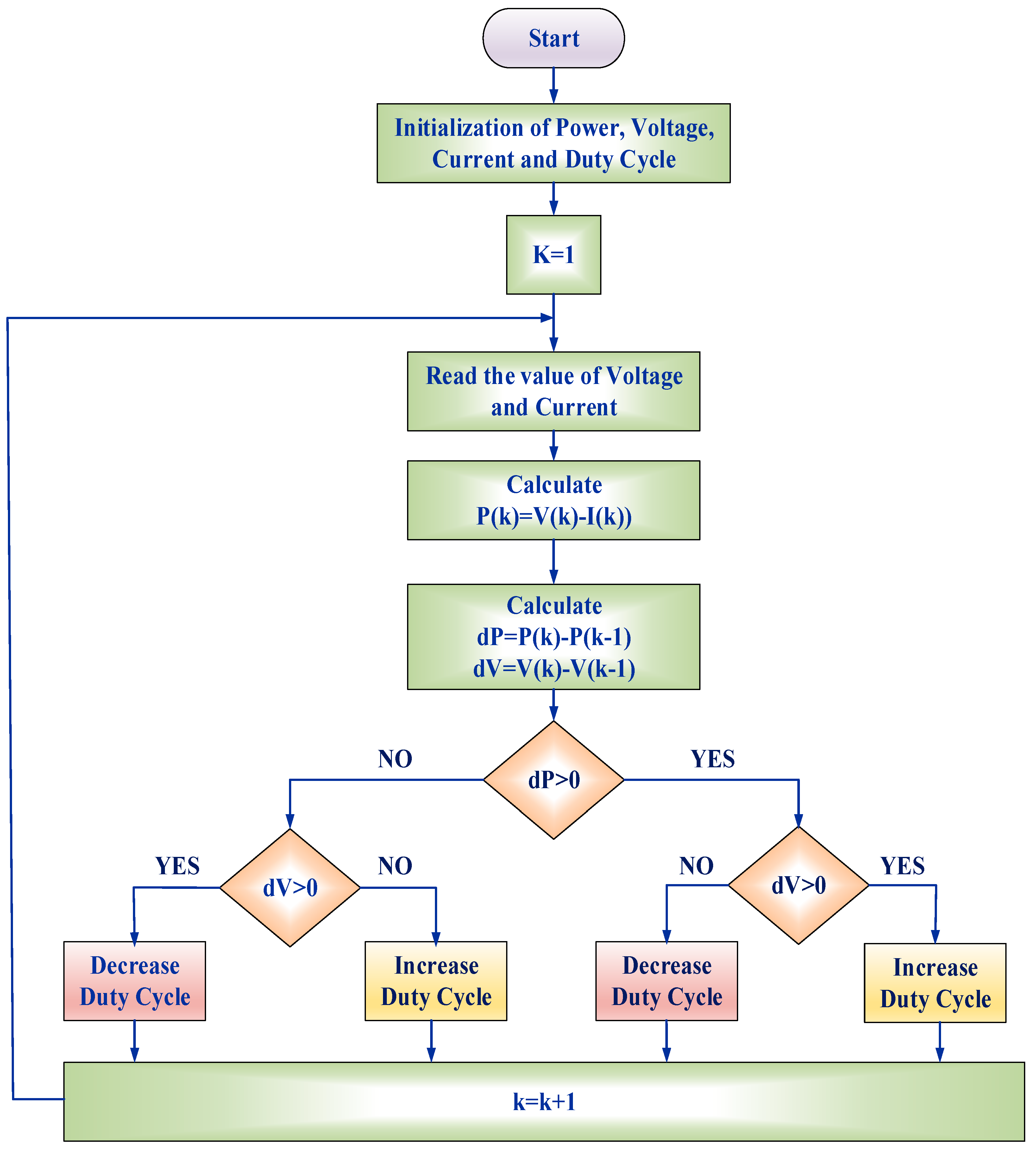
3.1. P&O Method
3.2. Hill Climbing Method
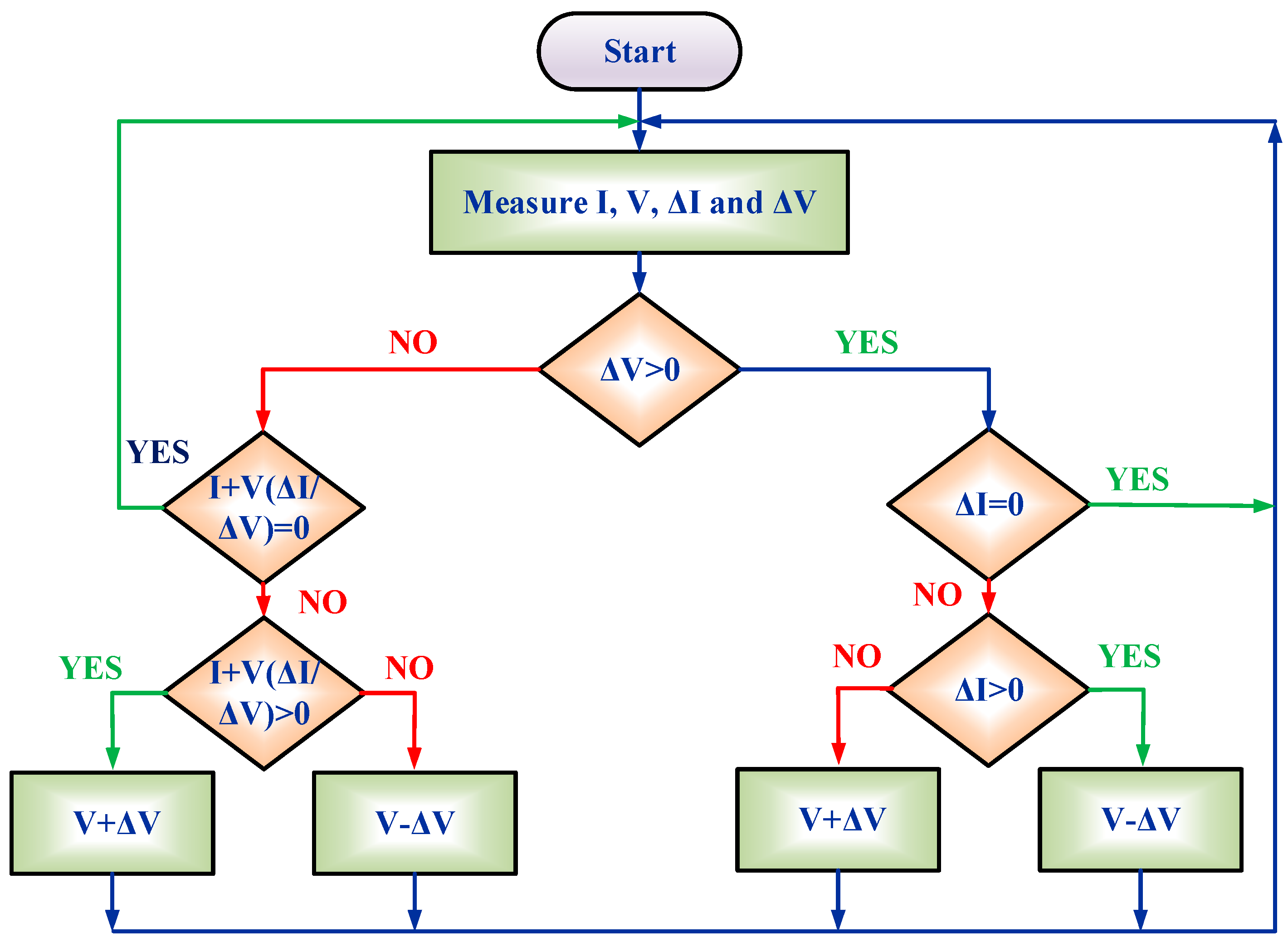
3.3. Incremental Conductance Method
3.4. Fuzzy Logic Based MPPT
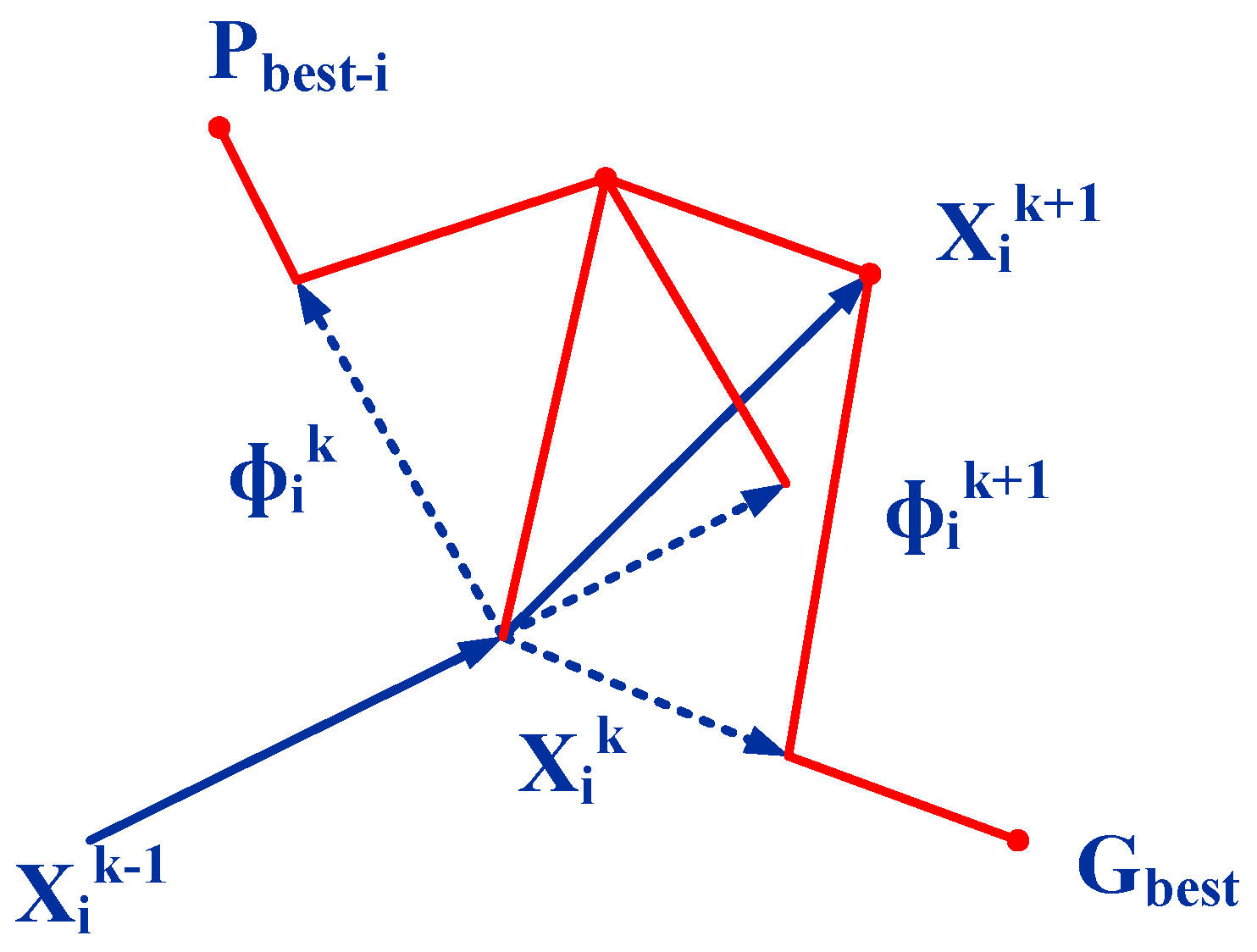
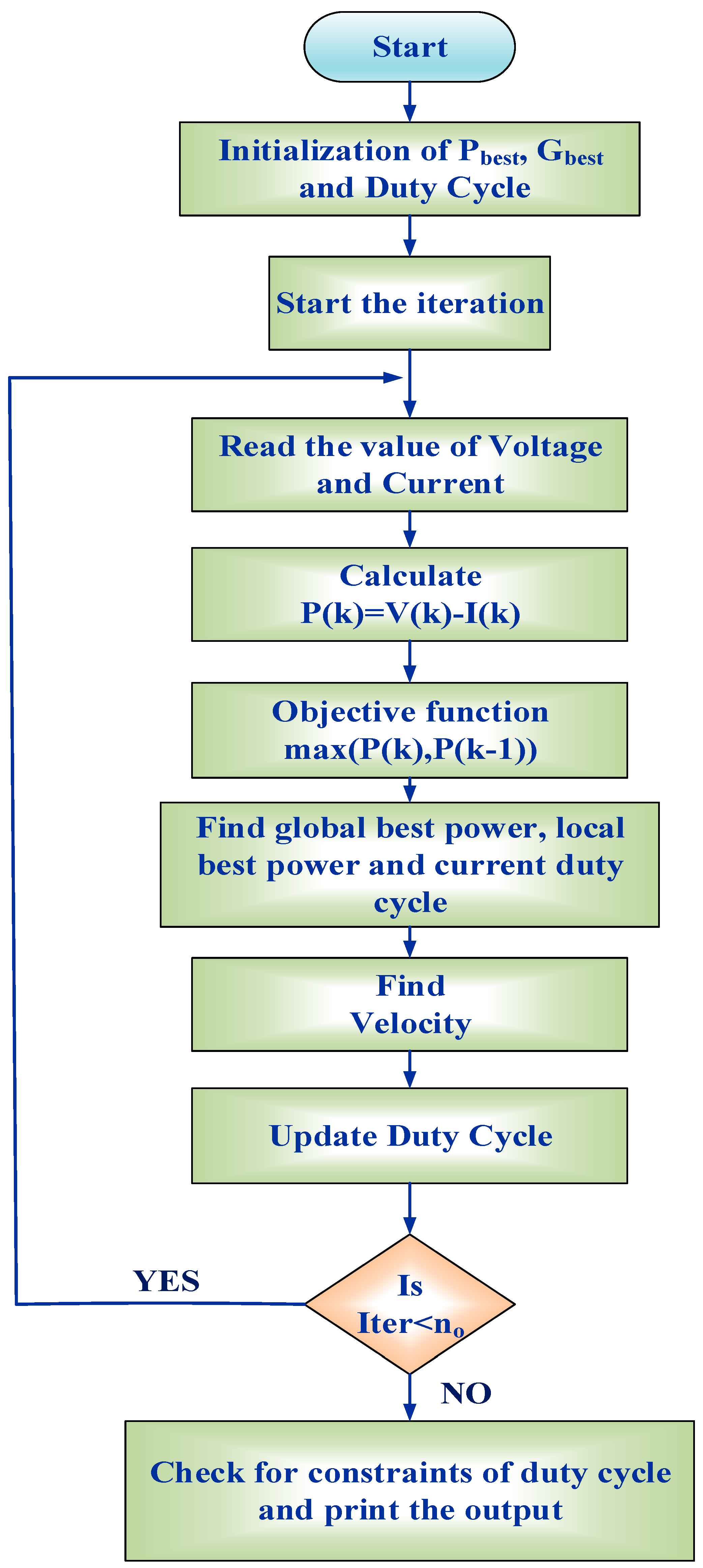
4. Particle Swarm Optimization (PSO) Algorithm
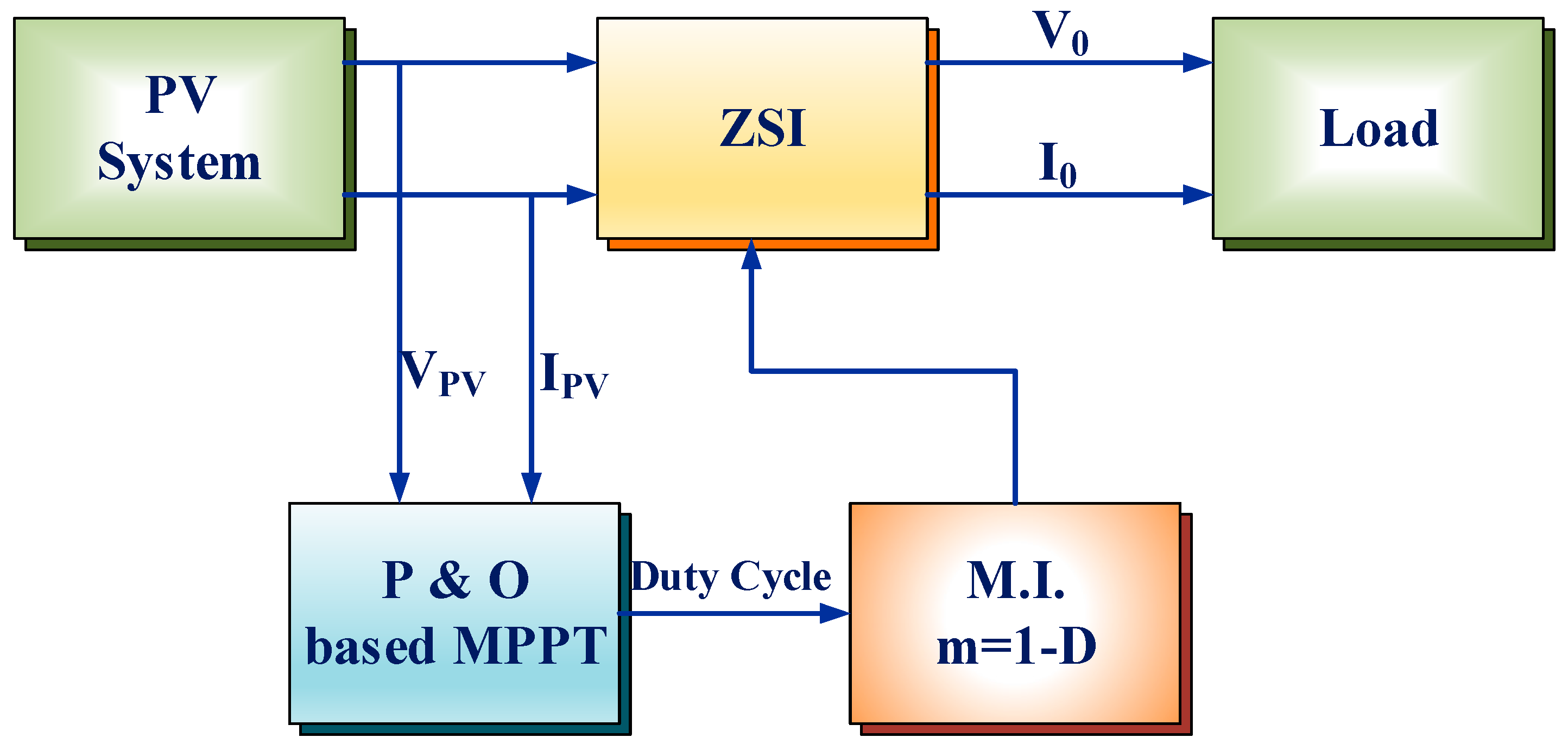
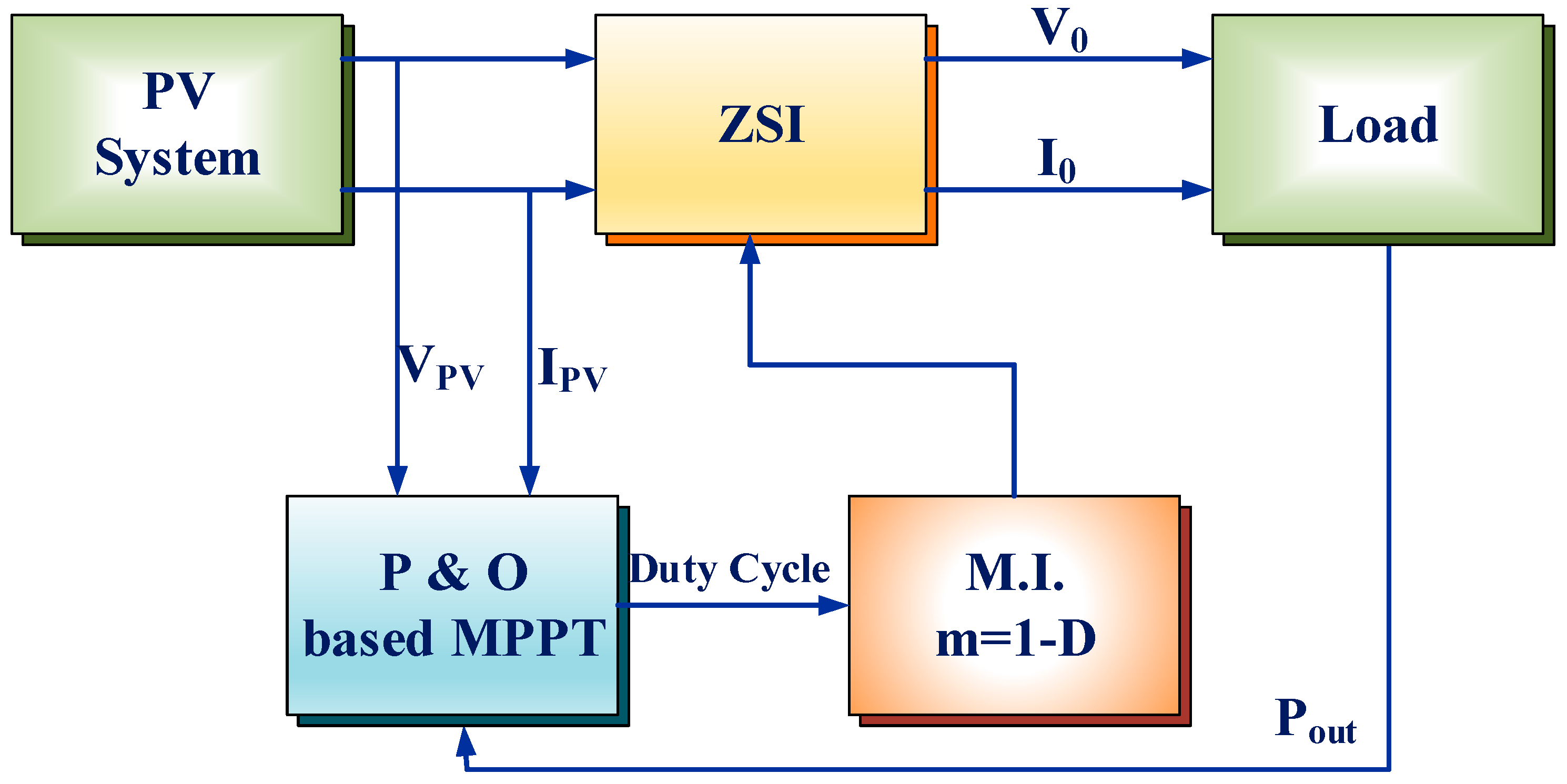
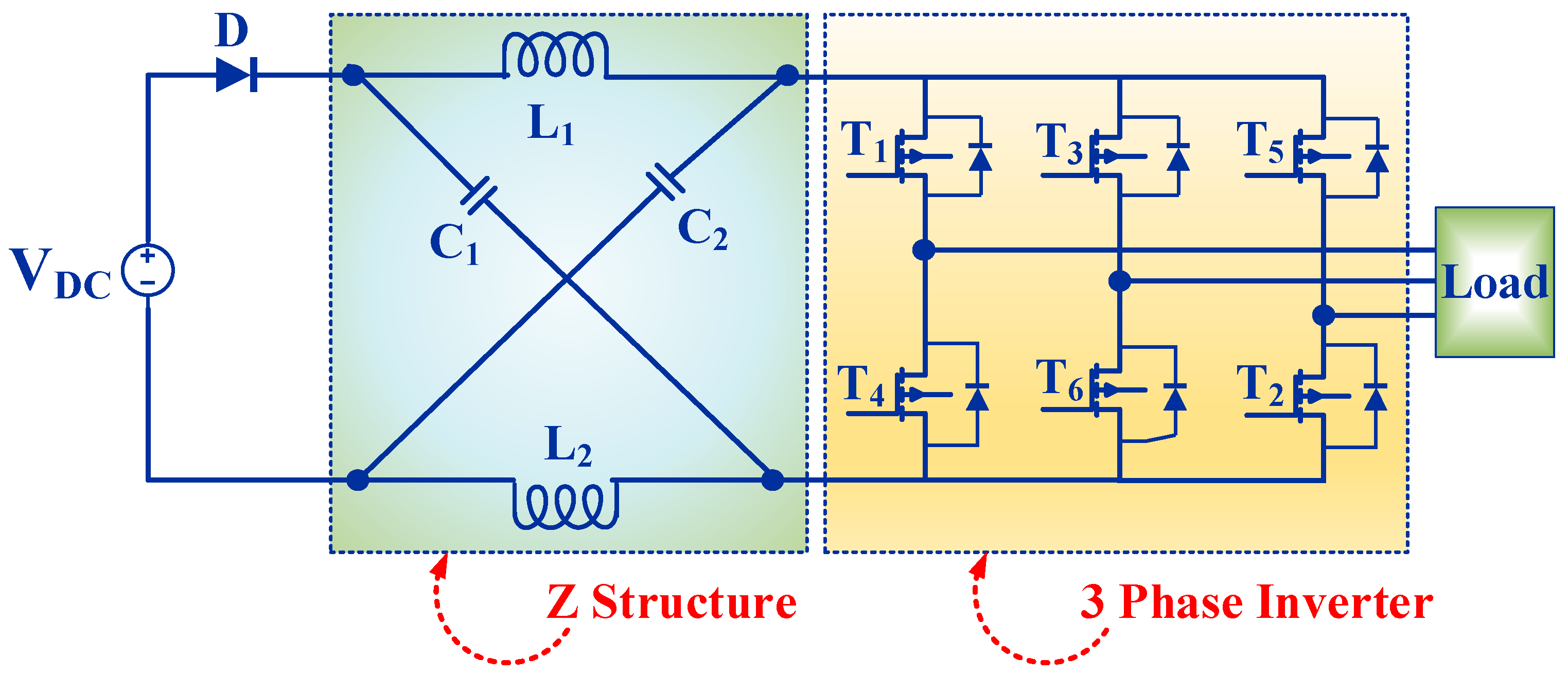
5. Z-Source Inverter
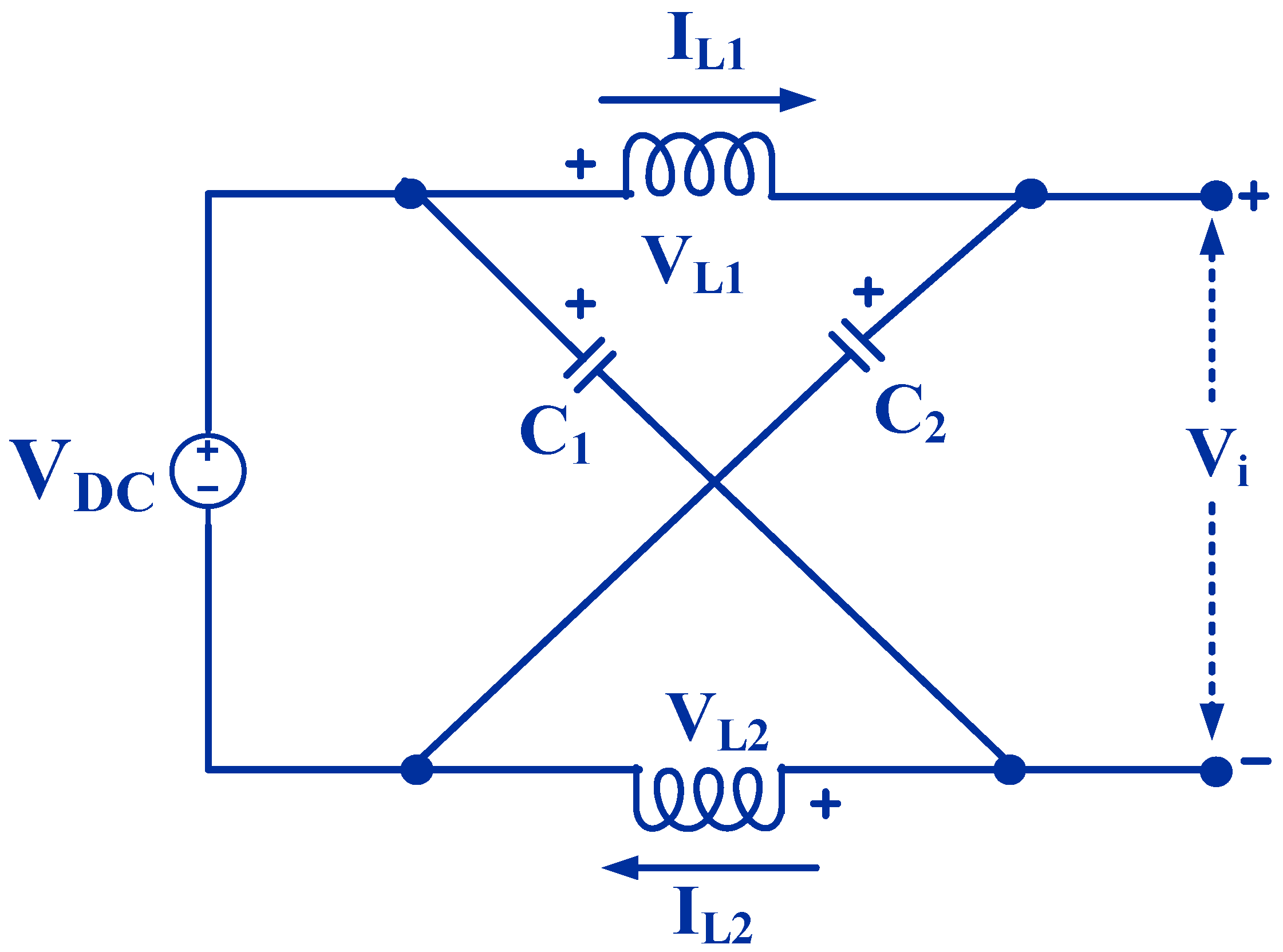
5.1. Non-Shoot through State
5.2. Shoot through State
5.3. Traditional Zero State
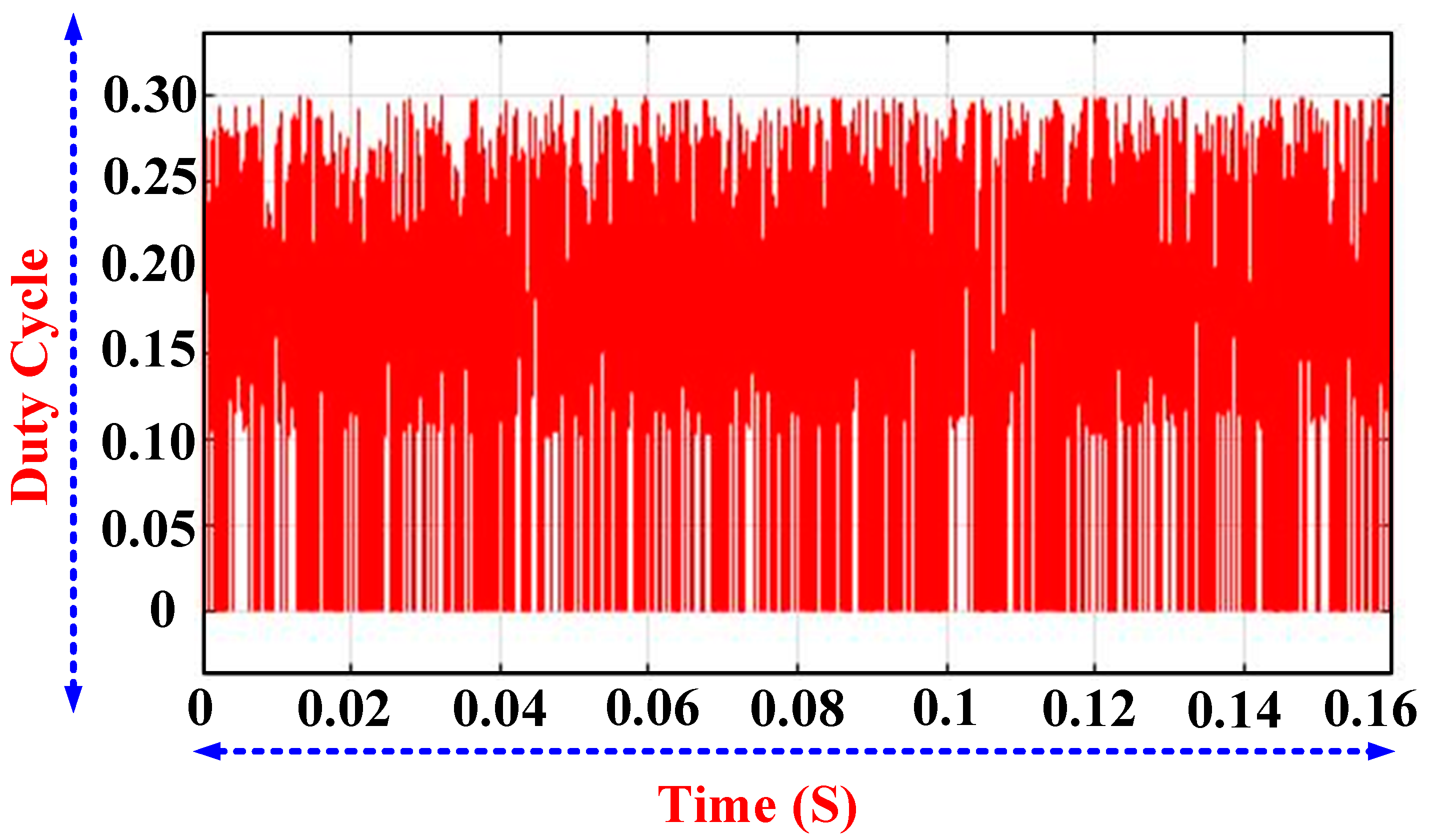
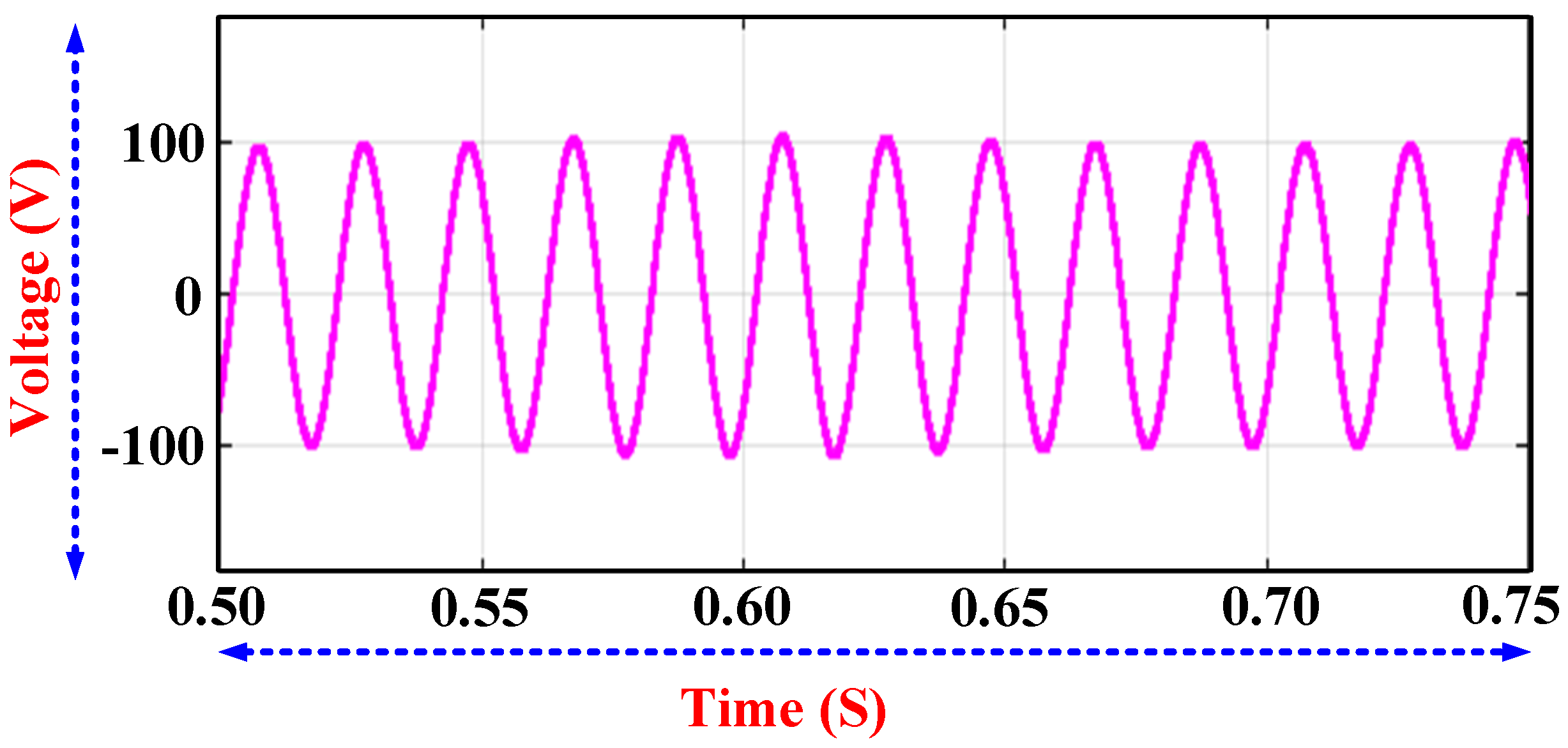
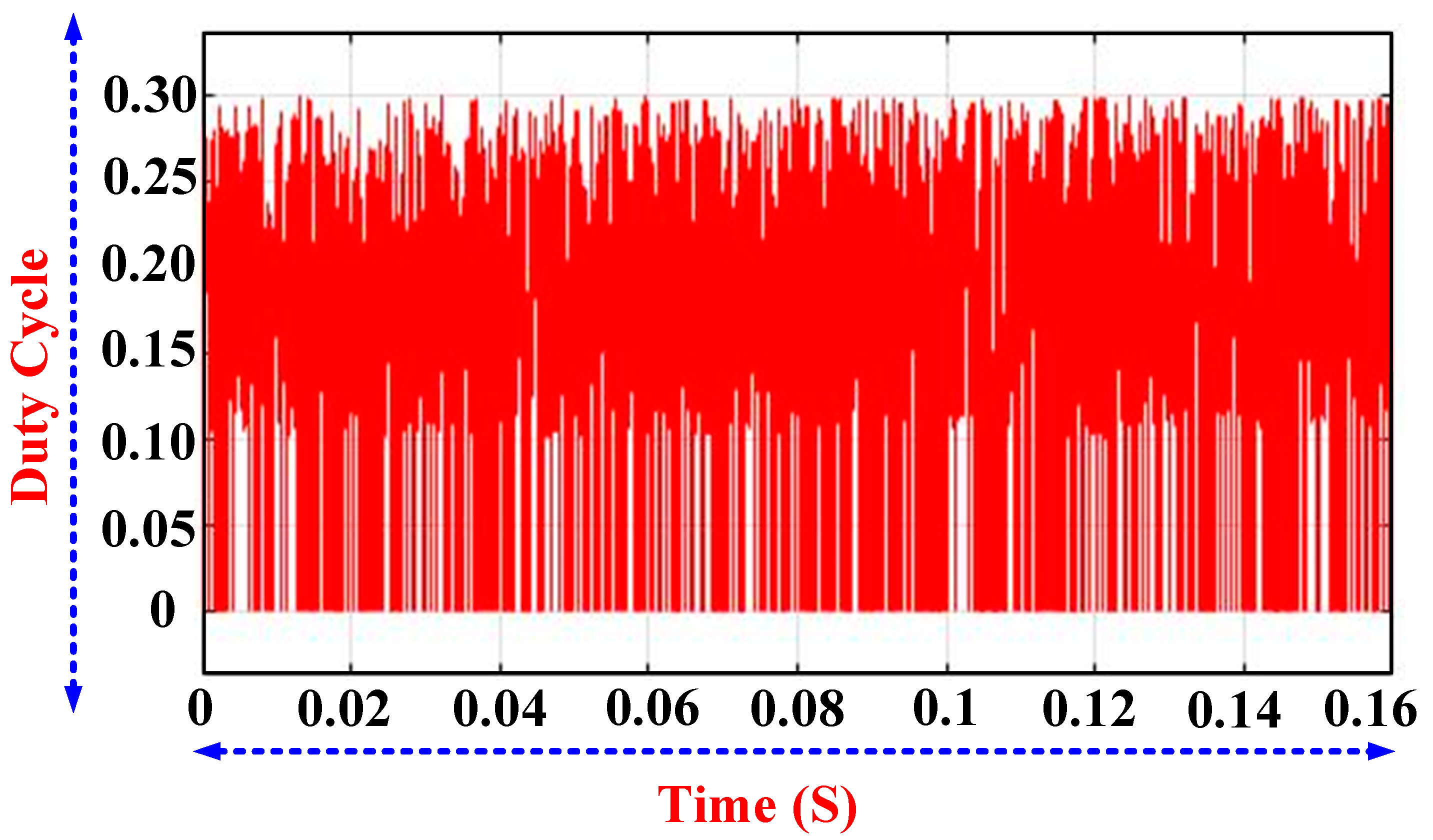
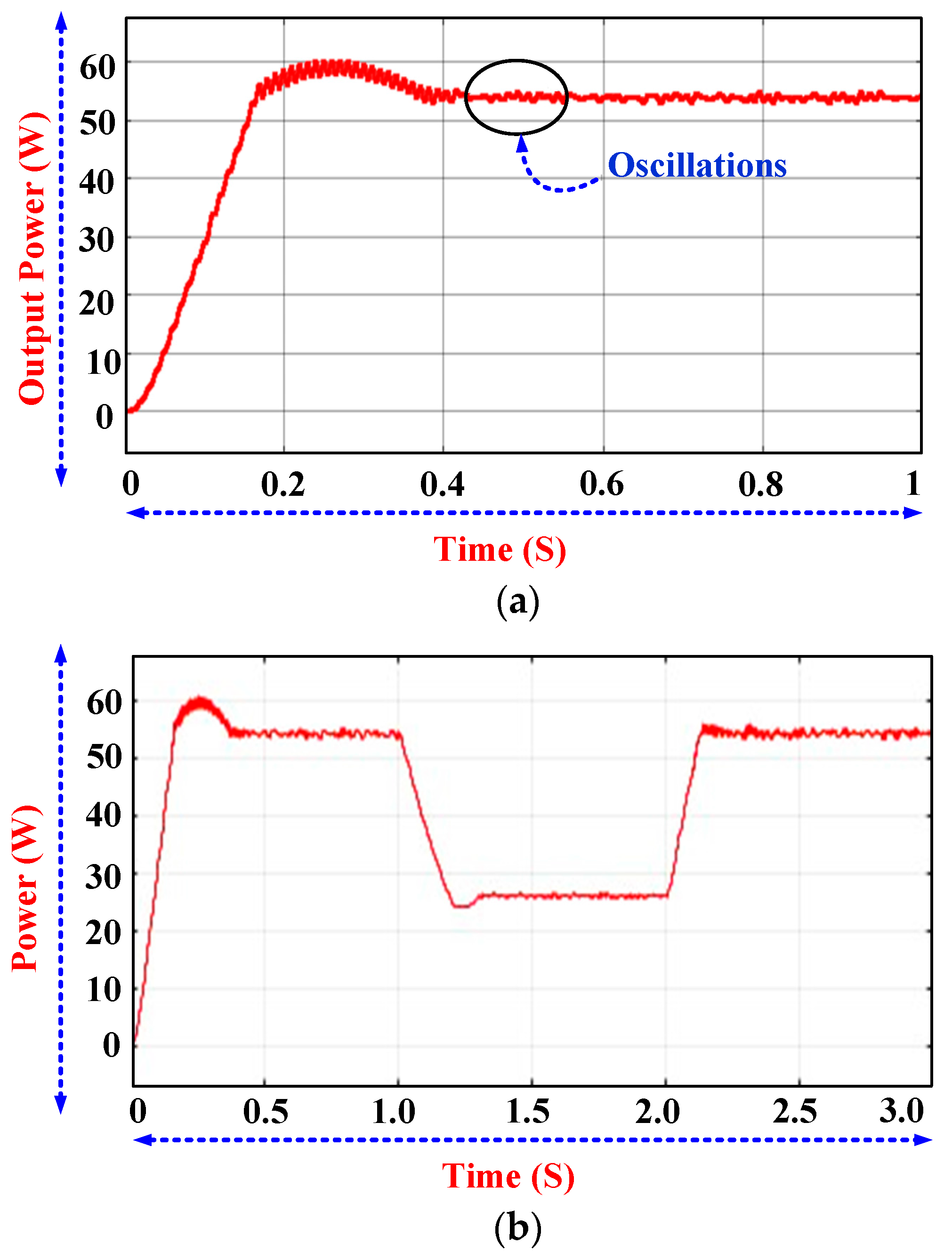
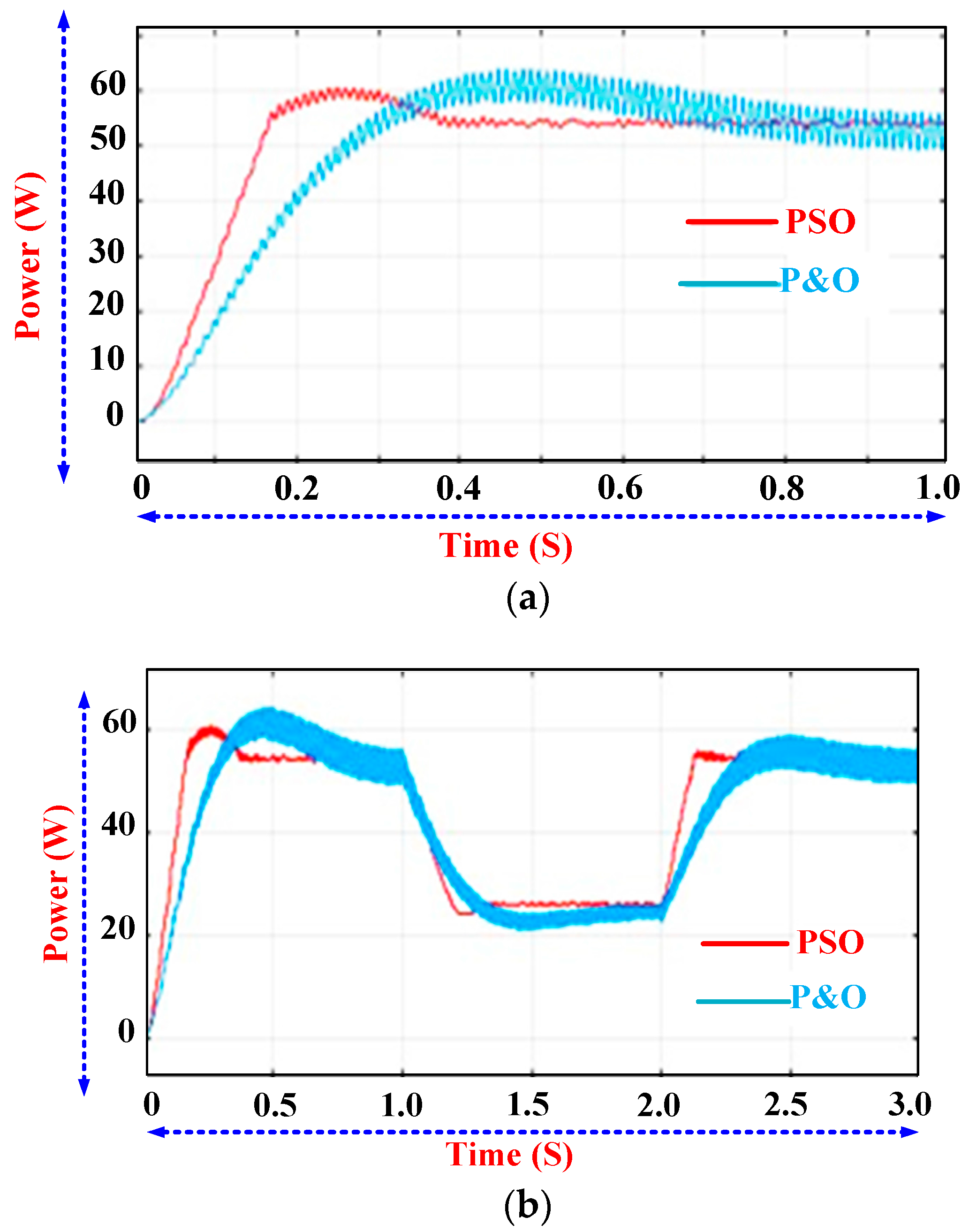
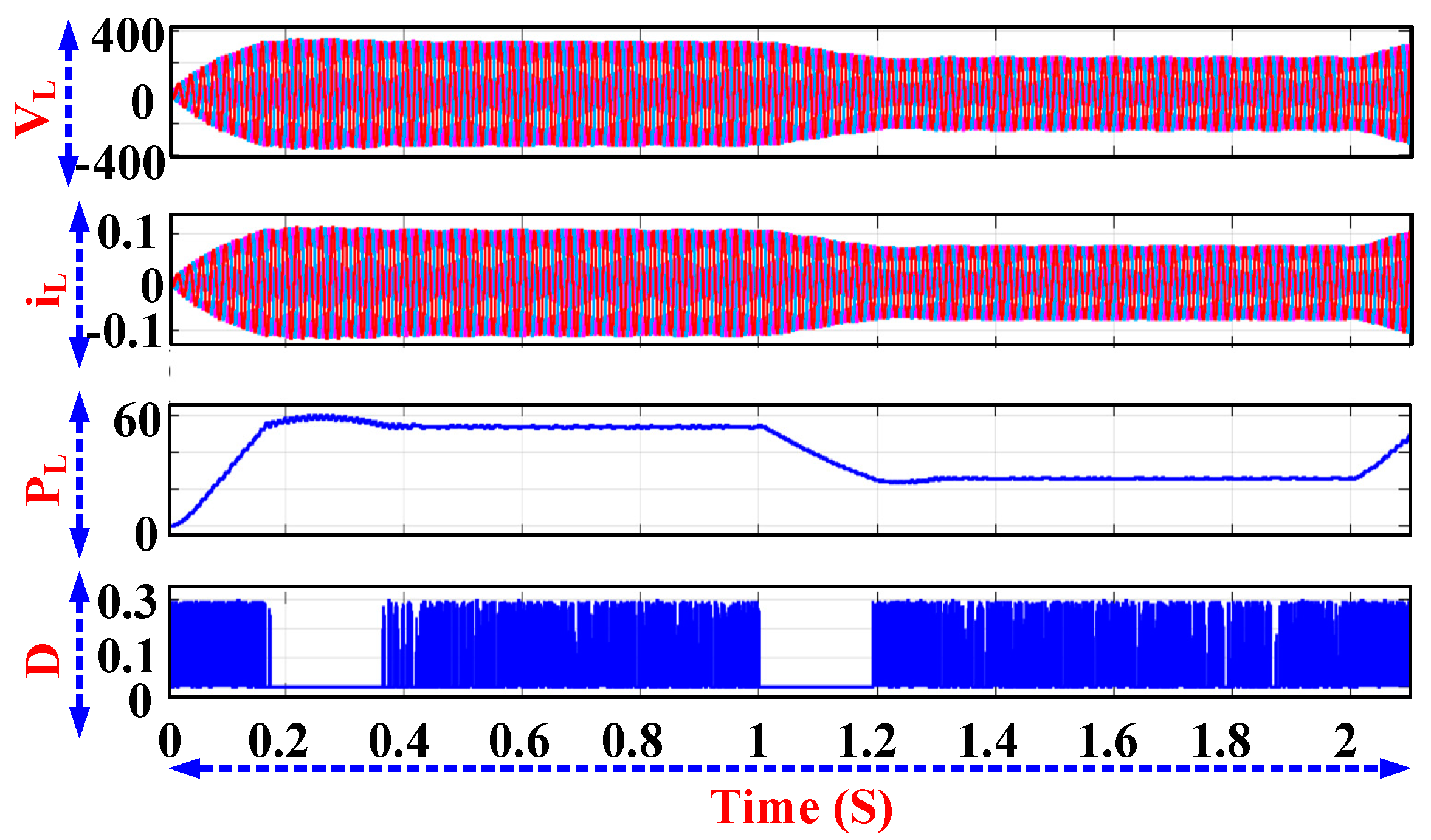
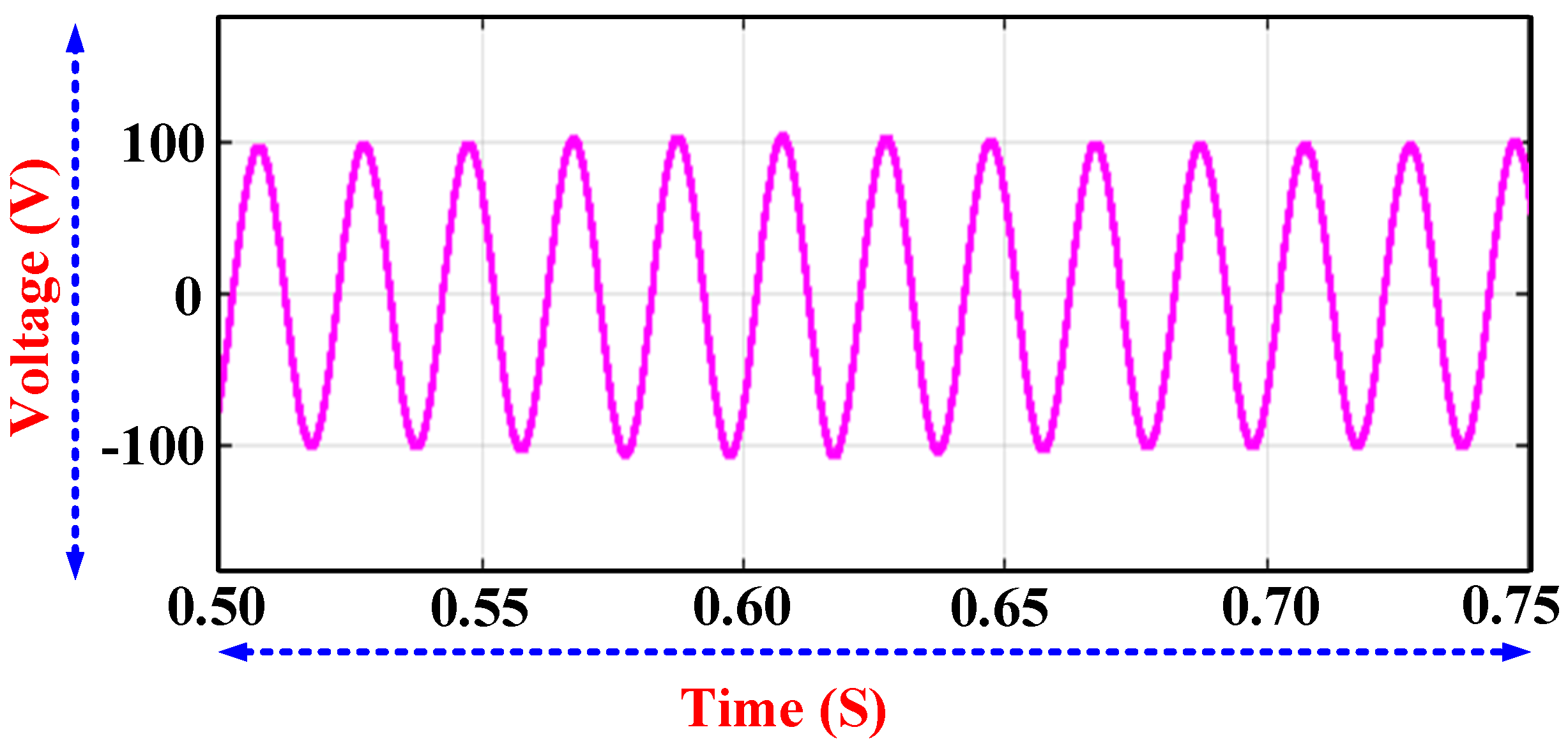
6. Results and Discussion
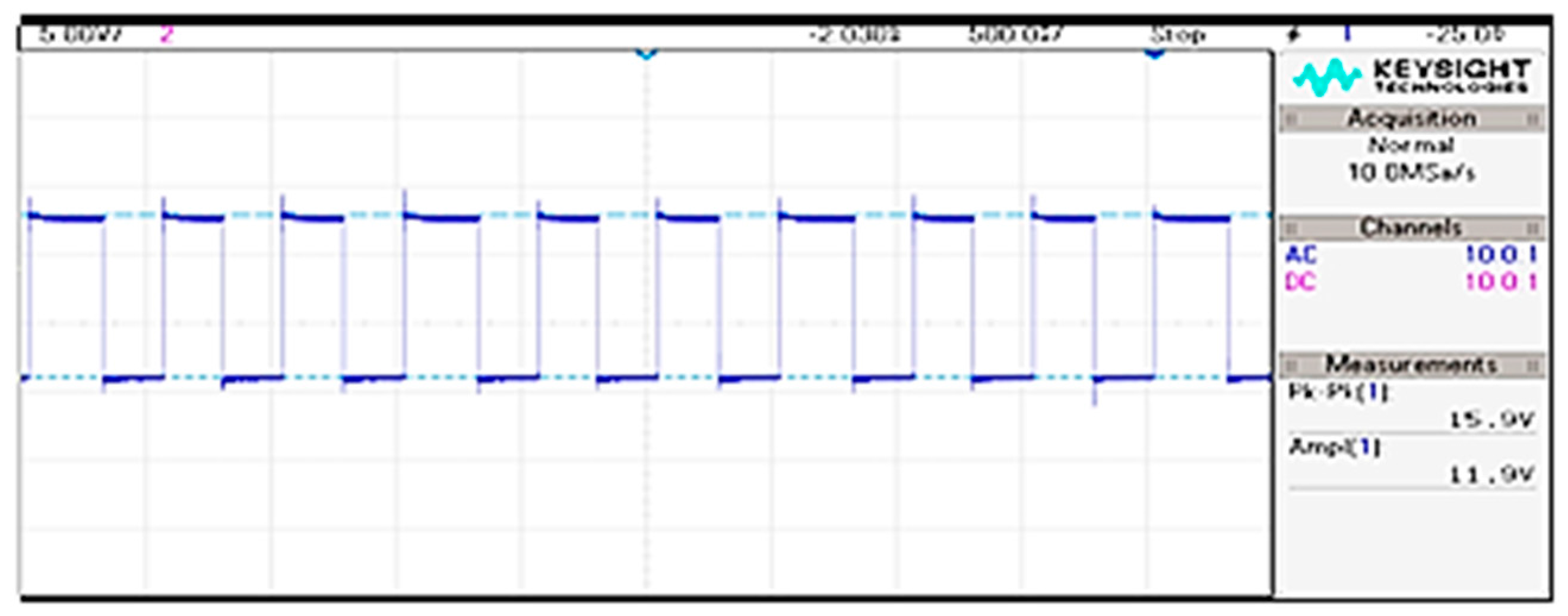
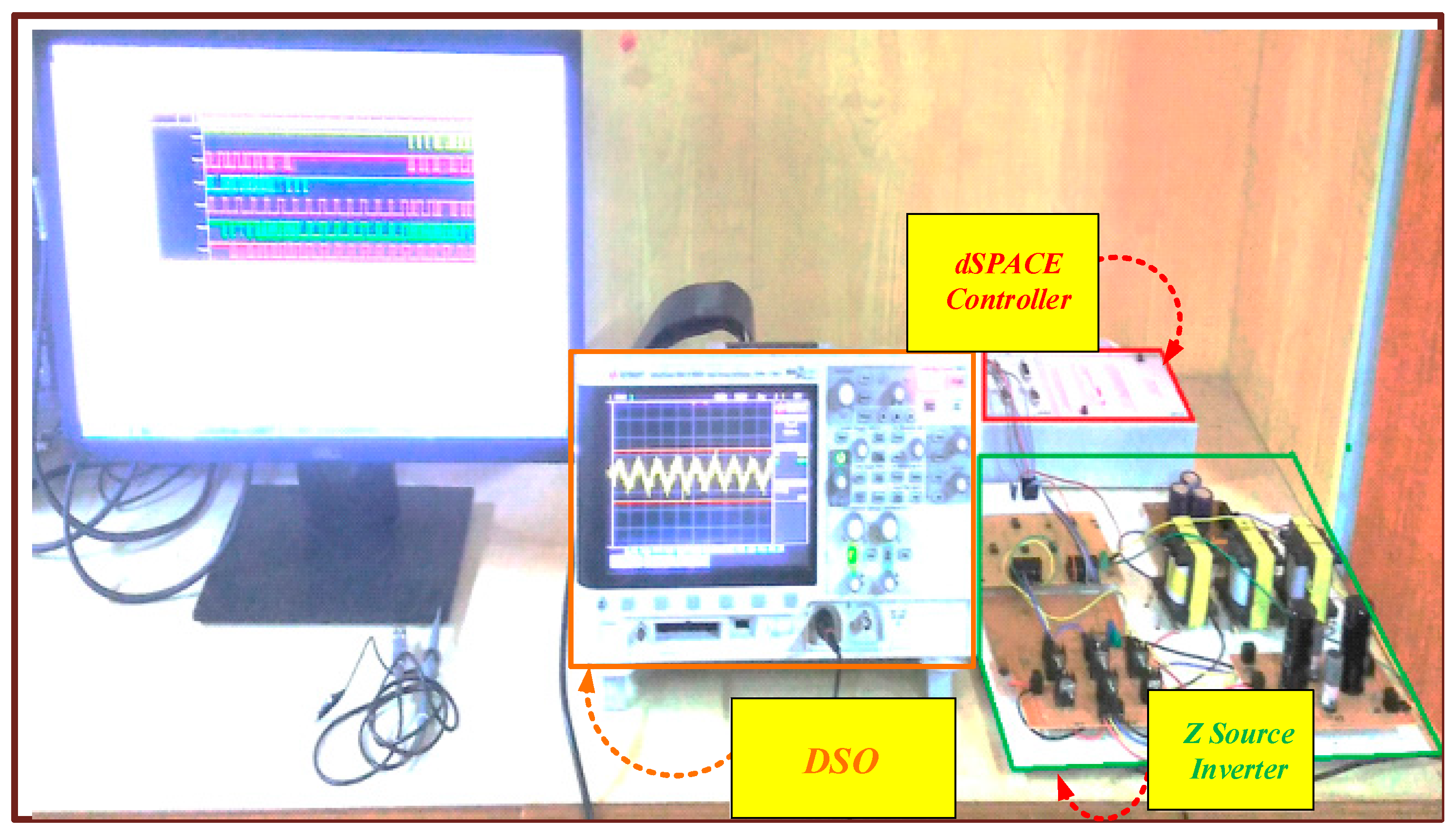
Hardware Setup
7. Conclusions
Author Contributions
Conflicts of Interest
References
- Esram, T.; Chapman, P.L. Comparison of photovoltaic array maximum power point tracking techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef]
- Saravanan, S.; Ramesh Babu, N.; Sanjeevikumar, P. Comparison and Analysis of DC/DC Converters with MPPT Techniques Based PV System. In Advances in Power Systems and Energy Management; Springer: Singapore, 2017; pp. 275–284. [Google Scholar]
- Jain, S.; Ramulu, C.; Padmanaban, S.; Ojo, J.O.; Ertas, A.H. Dual mppt algorithm for dual pv source fed open-end winding induction motor drive for pumping application. Sci. Technol. Int. J. 2016, 19, 1771–1780. [Google Scholar] [CrossRef]
- Anuradha, T.; Deiva Sundari, P.; Sanjeevikumar, P.; Pierluigi, S.; Zbigniew, L. Comparative Analysis of Common MPPT Techniques for Solar PV System with Soft Switched, Interleaved Isolated Converter. In Proceedings of the IEEE 1st Industrial and Commercial Power System Europe, 17th International Conference on Environment and Electrical Engg, IEEE-I&CPS/IEEE-EEEIC’17, Milan, Italy, 6–9 June 2017. [Google Scholar]
- Sanjeevikumar, P.; Grandi, G.; Patrick, W.; Frede, B.; Loncarski, J. A Simple MPPT Algorithm for Novel PV Power Generation system by High Output Voltage DC-DC Boost Converter. In Proceedings of the 24th IEEE International Symposium on Industrial Electronics, IEEE-ISIE’15, Rio de Janeiro, Brazil, 3–5 June 2015; pp. 214–220. [Google Scholar]
- Mellit, A.; Kalogirou, S.A. Artificial intelligence techniques for photovoltaic applications: A review. Prog. Energy Combust. Sci. 2008, 34, 574–632. [Google Scholar] [CrossRef]
- Khare, A.; Rangnekar, S. A review of particle swarm optimization and its applications in solar photovoltaic system. Appl. Soft Comput. 2013, 13, 2997–3006. [Google Scholar] [CrossRef]
- Geetha, M.; Natarajan, S.; Sanjeevikumar, P. Particle Swarm Optimization-Based Closed-Loop Optimal State Feedback Control for CSTR. In Advances in Power Systems and Energy Management; Springer: Singapore, 2017; pp. 469–479. [Google Scholar]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Molla, M.N.; Hossain, E. A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Hossain, E.; Perez, R.; Padmanaban, S.; Mihet-Popa, L.; Blaabjerg, F.; Ramachandaramurthy, V.K. Sliding Mode Controller and Lyapunov Redesign Controller to Improve Microgrid Stability: A Comparative Analysis with CPL Power Variation. Energies 2017, 10, 1959. [Google Scholar] [CrossRef]
- Suryavanshi, R.; Joshi, D.R.; Jangamshetti, S.H. PSO and P&O based MPPT technique for SPV panel under varying atmospheric conditions. In Proceedings of the 2012 International Conference on Power, Signals, Controls and Computation, Kerala, India, 3–6 January 2012. [Google Scholar]
- Abdelsalam, A.K.; Massoud, A.M.; Ahmed, S.; Enjeti, P.N. High-performance adaptive perturb and observe mppt technique for photovoltaic-based microgrids. IEEE Trans. Power Electron. 2011, 26, 1010–1021. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Sachin, J.; Ramulu, C.; Ramsha, K.; Sanjeevikumar, P. Effective Dual Solar PV Fed Three-Phase Open-End Winding Induction Motor Drive for Water Pumping System Application. J. Mod. Power Syst. Clean Energy 2017, 1771–1780. Available online: https://www.researchgate.net/publication/314721388_Effective_Dual_Solar_PV_Fed_Three-Phase_Open-End_Winding_Induction_Motor_Drive_for_Water_Pumping_System_Application (accessed on 22 January 2018).
- Padmanaban, S.; Blaabjerg, F.; Wheeler, P.; Ojo, J.O.; Ertas, A.H. High-voltage dc-dc converter topology for pv energy utilization—Investigation and implementation. Electron. Power Compon. Syst. 2016, 45, 221–232. [Google Scholar] [CrossRef]
- Ji, Y.; Jung, D.; Kim, J.; Kim, J.; Lee, T.; Won, C. A real maximum power point tracking method for mismatching compensation in PV array under partially shaded conditions. IEEE Trans. Power Electron. 2011, 26, 1001–1009. [Google Scholar] [CrossRef]
- Patel, H.; Agarwal, V. Maximum power point tracking scheme for PV systems operating under partially shaded conditions. IEEE Trans. Ind. Electron. 2008, 55, 1689–1698. [Google Scholar] [CrossRef]
- Masoum, M.A.; Dehbonei, H.; Fuchs, F.H. Theoretical and experimental analysis of photovoltaic systems with voltage and current-based maximum power point tracking. IEEE Power Eng. Rev. 2002, 22, 62. [Google Scholar] [CrossRef]
- Subudhi, B.; Pradhan, R. A Comparative Study on Maximum Power Point Tracking Techniques for Photovoltaic Power Systems. IEEE Trans. Sustain. Energy 2013, 4, 89–98. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An improved particle swarm optimization (PSO)—Based MPPT for PV with reduced steady-state oscillation. IEEE Trans. Power Electron. 2012, 27, 3627–3638. [Google Scholar] [CrossRef]
- Renaudineau, H.; Donatantonio, F. A PSO-Based Global MPPT Technique for Distributed PV Power Generation. IEEE Trans. Ind. Electron. 2015, 62, 1047–1058. [Google Scholar] [CrossRef]
- Chao, K. A High Performance PSO-Based Global MPP Tracker for a PV Power Generation System. Energies 2015, 8, 6841–6858. [Google Scholar] [CrossRef]
- Mughal, M.A.; Ma, Q.; Xiao, C. Photovoltaic cell Parameter Estimation using Hybrid Particle Swarm Optimization and Simulated Annealing. Energies 2017, 10, 1213. [Google Scholar] [CrossRef]
- Cheng, P.; Peng, B.; Liu, Y.; Cheng, Y.; Huang, J. Optimization of a Fuzzy-Logic-Control-Based MPPT Algorithm Using the Particle Swarm Optimization Technique. Energies 2015, 8, 5338–5360. [Google Scholar] [CrossRef]
- Sanjeevikumar, P.; Thiagarajan, Y.; Sivakumaran, T.S. Design of fuzzy logic controller for a DC-AC converter for a grid connected system using PV cell. In Proceedings of the IEEE International Conference on Computing, Communication and Networking, IEEE-ICCCNET’08, Tamilnadu, India, 18–20 December 2008; pp. 1–6. [Google Scholar]
- Swaminathan, G.; Ramesh, V.; Umashankar, S.; Sanjeevikumar, P. Fuzzy-Based Microgrid Energy Management System Using Interleaved Boost Converter and Three-Level NPC Inverter with Improved Grid Voltage Quality. In Advances in Power Systems and Energy Management; Springer: Singapore, 2017; pp. 325–337. [Google Scholar]
- Tiwari, R.; Babu, N.R.; Sanjeevikumar, P. Fuzzy Logic-Based Pitch Angle Controller for PMSG-Based Wind Energy Conversion System. In Advances in Power Systems and Energy Management; Springer: Singapore, 2017; pp. 277–286. [Google Scholar]
- Tiwari, R.; Babu, N.R.; Sanjeevikumar, P. Comparison Between PI Controller and Fuzzy Logic-Based Control Strategies for Harmonic Reduction in Grid-Integrated Wind Energy Conversion System. In Advances in Power Systems and Energy Management; Springer: Singapore, 2017; pp. 297–306. [Google Scholar]
- Ishaque, K.; Salam, Z.; Taheri, H. Accurate matlab simulink pv system simulator based on a two-diode model. J. Power Electron. 2011, 11, 179–187. [Google Scholar] [CrossRef]
- Koad, R.B.A.; Zobaa, A.F.; El-Shahat, A. A novel MPPT Algorithm based on Particle Swarm. IEEE Trans. Sust. Energy 2017, 8, 468–476. [Google Scholar] [CrossRef]
- Kuo, Y.C.; Liangand, T.J.; Cben, J.F. Novel Maximum Power Point Tracking Controller for Photovoltaic Energy Conversion system. IEEE Trans. Ind. Electron. 2001, 48, 594–601. [Google Scholar]
- Chen, Z.; Xiong, R.; Wang, K.; Jiao, B. Optimal energy management strategy of a plug-in hybrid electric vehicle based on a particle swarm optimization algorithm. Energies 2015, 8, 3661–3678. [Google Scholar] [CrossRef]
- Xu, P.; Zhang, X.; Cao, C.Z.R.; Chang, L. Study of Z-Source Inverter for Grid-Connected PV Systems. In Proceedings of the IEEE Power Electronics Specialist Conference, Jeju, Korea, 18–22 June 2006. [Google Scholar]
- Tang, Y.; Xie, S.J.; Zhang, C.H.; Xu, Z.G. Improved Z-source inverter with reduced capacitor voltage stress and soft-start capability. IEEE Trans. Power Electron. 2009, 24, 409–415. [Google Scholar] [CrossRef]
- Siwakoti, Y.P.; Peng, F.S.; Blabbjerg, F.; Loh, P.C.; Town, G.E. Impedance Source Networks for Electric Power Conversion Part I: A Topological Review. IEEE Trans. Power Electron. 2015, 30, 669–716. [Google Scholar] [CrossRef]
- Nguyen, M.; Choi, Y. Maximum Boost Control Method for Single-Phase Quasi Switched Boost and Quasi-Z-Source Inverters. Energies 2017, 10, 553. [Google Scholar] [CrossRef]
- Sunder, P.G.; Shanthi, B.; Nachiappan, A.; Natarajan, S.P.; Sanjeevikumar, P. Single Phase Asymmetric Switched-Inductor Quasi-Z-Source CHB Multilevel Inverter. In Advances in Power Systems and Energy Management; Springer: Singapore, 2017; pp. 285–294. [Google Scholar]
- Pandav, K.M.; Mahajan, S.B.; Sanjeevikumar, P.; Badave, S.M.; Pachagade, R. 2.4 kW Three-Phase Inverter for Aircraft Application-Hardware Implementation. In Advances in Power Systems and Energy Management; Springer: Singapore, 2017; pp. 325–335. [Google Scholar]
- Xiao, X.; Huang, X.; Kang, Q. A hill-climbing-method-based maximum-power-point-tracking strategy for direct-drive wave energy converters. IEEE Trans. Ind. Electron. 2016, 63, 257–267. [Google Scholar] [CrossRef]
- Sera, D.; Mathe, L.; Kerekes, T.; Spataru, S.V.; Teodorescu, R. On the Perturb-and-Observe and Incremental Conductance MPPT Methods for PV Systems. IEEE J. Photovolt. 2013, 3, 1070–1078. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Specification | Values |
|---|---|
| Peak power, Pmpp | 60 W |
| Peak Power voltage, Vmpp | 17.1 V |
| Peak Power Current, Impp | 3.5 A |
| Short-circuit current, Isc | 3.8 A |
| Open circuit voltage, Voc | 21.1 V |
| Temperature co-efficient of current, Ki | 0.003 (mA/°C) |
| Temperature co-efficient of voltage, KV | −0.08 (mV/°C) |
| Solar irradiation at STC | 1000 W/m2 |
| Temperature at STC | 25 °C |
| Electron charge, q | 1.6 × 10−19 C |
| Number of cells connected in series, Ns | 36 |
| Number of cells connected in parallel, Np | 1 |
| Ideality factor of the diode, n | 1.3 |
| Boltzmann’s constant, k | 1.3805 × 10−23 J/K |
| Band gap energy, Ego | 1.12 eV |
| Series resistance, Rs | 0.0018 Ω |
| Shunt resistance, Rsh | 400 Ω |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
N., K.; Dash, S.S.; Padmanaban, S.; S., P.; Morati, P.K. Maximum Power Point Tracking Implementation by Dspace Controller Integrated Through Z-Source Inverter Using Particle Swarm Optimization Technique for Photovoltaic Applications. Appl. Sci. 2018, 8, 145. https://doi.org/10.3390/app8010145
N. K, Dash SS, Padmanaban S, S. P, Morati PK. Maximum Power Point Tracking Implementation by Dspace Controller Integrated Through Z-Source Inverter Using Particle Swarm Optimization Technique for Photovoltaic Applications. Applied Sciences. 2018; 8(1):145. https://doi.org/10.3390/app8010145
Chicago/Turabian StyleN., Kalaiarasi, Subranshu Sekhar Dash, Sanjeevikumar Padmanaban, Paramasivam S., and Pandav Kiran Morati. 2018. "Maximum Power Point Tracking Implementation by Dspace Controller Integrated Through Z-Source Inverter Using Particle Swarm Optimization Technique for Photovoltaic Applications" Applied Sciences 8, no. 1: 145. https://doi.org/10.3390/app8010145