Chaos-Based Underwater Communication With Arbitrary Transducers and Bandwidth

1
Shaanxi Key Laboratory of Complex System Control and Intelligent Information Processing, Xi’an University of Technology, Xi’an 710048, China
2
Institute for Complex System and Mathematical Biology, SUPA, University of Aberdeen, Aberdeen AB24 3UE, UK
*
Author to whom correspondence should be addressed.
Appl. Sci. 2018, 8(2), 162; https://doi.org/10.3390/app8020162
Submission received: 30 October 2017
/
Revised: 8 January 2018
/
Accepted: 18 January 2018
/
Published: 24 January 2018
(This article belongs to the Special Issue Underwater Acoustics, Communications and Information Processing)
Abstract
:In this work, an enhanced differential chaos shift keying (DCSK), based on a first order hybrid chaotic system, is being proposed for a high reliability underwater acoustic communication system. It can be integrated into systems that use standard existing transducers. We show that a coherent operation between the received signal and the time reversal of the basis function in a first order hybrid chaotic system maximizes the signal to noise ratio at the receiver. Concurrently, DCSK configuration is used to resist the distortion caused by the complex underwater acoustic channel. Our simulation results show that the proposed method has lower bit error rate (BER). In addition, it shows higher communication reliability over underwater acoustic channel as compared to the conventional DCSK using logistic map and its variant forms such as Correlation Delay Shift Keying (CDSK), Phase-Separate DCSK (PS-DCSK), High Efficiency DCSK (HE-DCSK), and Reference Modulated DCSK (RM-DCSK).
1. Introduction
The underwater communication has numerous applications for the marine researchers, oceanographers, marine commercial operators, and defense organizations. Underwater acoustic communication is the main medium for such applications [1,2,3,4,5,6]. However, the reliability of underwater acoustic communication is restricted by several physical channel constraints, such as multipath propagation, amplitude damping, time-varying characteristics, and ambient noise [7,8,9]. Chaotic signal has been applied in digital communication systems for the past two decades and chaotic modulation schemes have attracted considerable interest [10,11,12,13]. It is mainly due to the fact that chaotic signals demonstrate some attractive nature features, including a delta-function-like autocorrelation property required by spread spectrum systems [14], immunity to multipath propagation [15] and jamming signal [16], a large channel capacity due to broadband property [17], and increased transmission security due to a noise-like waveform [18,19,20].
Chaos-based communication systems can be classified into two categories, i.e., coherent and non-coherent communication. In coherent communication systems, transmitter and receiver need to be synchronized, being highly susceptible to channel constraints, in particular to multipath propagation [21]. In this case, robust chaotic synchronization in a complicated wireless channel is rather difficult to be achieved. To avoid the chaos synchronization demand, non-coherent communication systems have been proposed, which do not require chaos synchronization and channel estimation, offering a more suitable approach for this complicated communication channel.
In non-coherent communication systems, such as differential chaos shift keying (DCSK) [22], one bit duration is divided into two equal time slots, where the reference signal is transmitted in the first slot, and its repeated or its inverted copy (according to the bit to be transmitted) is sent in the second slot. The DCSK and its modified versions exhibit both low bit error rate (BER) and robustness against channel distortion [23,24,25,26]. Most of the previous researcher focused on the problem of low data transmission rate [25,26,27,28,29,30,31], in which half of bit energy is used to transmit the reference signal. In Reference [27], Yang and Jiang proposed a Reference-Modulated DCSK (RM-DCSK) system; the first information bit is sent in the first time slot, and the waveform in the second slot carries not only the second information bit but also the reference signal of the next frame. In Reference [28], the High Efficiency DCSK (HE-DCSK) system was proposed, where the information bearing signal carries two-bit information using the superposition of one information bit multiplied by the current reference and another information bit multiplied by the last reference in the second slot. The two methods achieve double data transmission rate and double bandwidth efficiency compared with the conventional DCSK. High data rate Code Shift DCSK (HCS-DCSK) system [29] uses the sum of multiple bits multiplied by different (uncorrelated) chaotic references to form the transmitting signal for just one frame to achieve high bit rate, but it needs the synchronized chaotic references at the receiver, which is difficult to implement. Phase-Separate DCSK (PS-DCSK) system [30] uses the sinusoidal and its orthogonal signals to separate the reference signals and the information bearing signals, respectively. It not only avoids radio frequency delay lines, which is difficult to integrate in Complementary Metal Oxide Semiconductor (CMOS) technology, but it also achieves twice as much data rate as the original DCSK. Those methods utilize the orthogonality property of the chaotic signal and the combined information signals of multi-bits to form one frame to be transmitted. They achieve higher transmission rates and BER as comparable to the conventional DCSK in presence of additive Gaussian white noise (AWGN) channel. However, as a complex communication channel, underwater acoustic communication channel suffers from more serious constraints as compared to air-based wireless communication, such as multipath propagation and time-varying delays, Doppler frequency shift phenomenon, and ambient noise. The underwater acoustic communication channel calls for overall better reliability, not just higher bit transmission rate.
The chaotic signal has been proved to be an optimal waveform for communication in the sense that it allows for the use of a very simple matched filter structure in a white noise channel [32,33,34]. Encouraged by those works, a DCSK system is proposed based on a first order hybrid chaotic system and the PS-DCSK system. In this method, the chaotic signals are generated by the first order hybrid system rather than the logistic maps used in Reference [30]. There is a basis function for the first order hybrid chaotic system. A coherent operation using the received signal and the time reverse of the basis function maximizes the signal to noise ratio (SNR) at the receiver [32]. Moreover, in the proposed DCSK configuration, multi-points with maximum SNR are used to decode the information, which further improves the performance of the proposed method as compared with the PS-DCSK system. The reference signals and the information bearing signals are modulated separately into a sinusoidal signal and its orthogonal waveforms. From the energy point of view, the energy efficiency of our proposed method is the same as the conventional DCSK. However, it not only doubles the data transmission rate by sending one bit information within one time slot, but also simplifies the structure of the communication system by eliminating the delay and switch components, which are necessary and difficult to implement in the conventional DCSK system [22,27,28]. The proposed method does not need chaotic synchronization between the transmitter and the receiver, and does not require channel estimation and complicated equalization algorithm, which are necessary for most conventional underwater acoustic communication methods. The proposed method shows strong robustness against channel distortion and multipath propagation in the underwater acoustic channel. In addition, the first order chaotic hybrid system uses an external clock to regulate the updating of the system switching states, which is isolated from the rest of the chaotic system. It avoids the time jitter or phase noise of the switching state in real electronic oscillator circuit, and provides a more accurate state switching interval as compared to that of autonomous chaotic oscillators used in [33,34], which helps to generate accurate frame duration and to decode the information using the maximum SNR property of the matched filter, thus improving the BER performance. Therefore, the chaotic signal used is easy to generate and control, with practical benefits for communication applications. In the proposed communication system, the reference chaotic signal and the binary information bearing chaotic signal are used to amplitude modulate the sinusoidal and cosines waveform with the same frequency, respectively, and summed together to produce an encoded signal not only compatible with the available transducer for the communication but also suitable for the bandwidth of interest.
This paper is organized as follows: The proposed DCSK system is introduced in Section 2. In Section 3, simulation results of the proposed method are given and compared with the conventional DCSK [21], NR-DCSK [23], RM-DCSK [27], HE-DCSK [28], Phase-Separate DCSK [30] (PS-DCSK) and correlation delay shift keying [31] (CDSK). Conclusions are given in Section 4.
2. DCSK Based on First Order Hybrid System
2.1. The First Order Hybrid Chaotic System
The first order hybrid chaotic system contains a continuous state and a discrete state , given by [32]
where t is a continuous time. The discrete state determined by a switching condition detected at every intervals T is given by
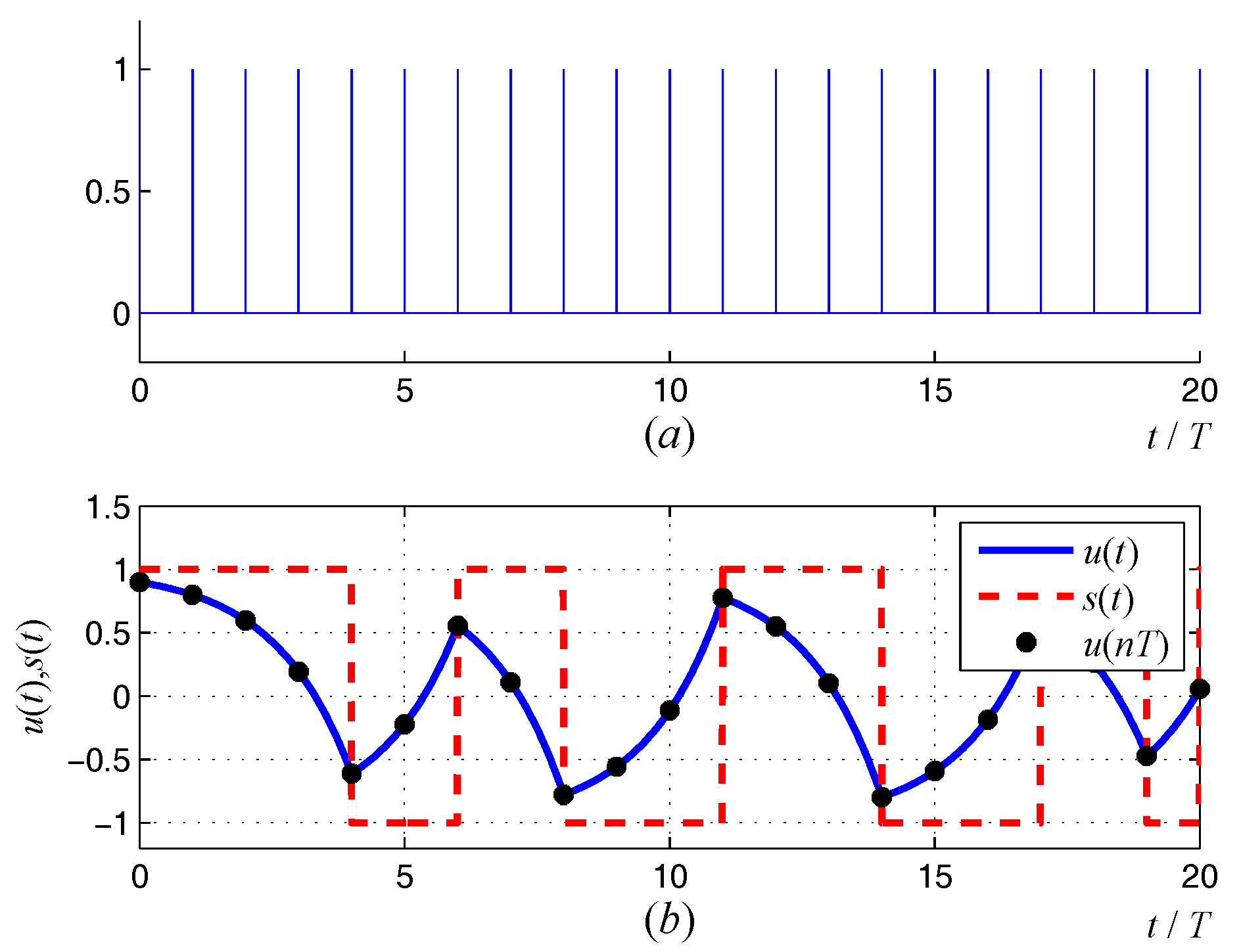
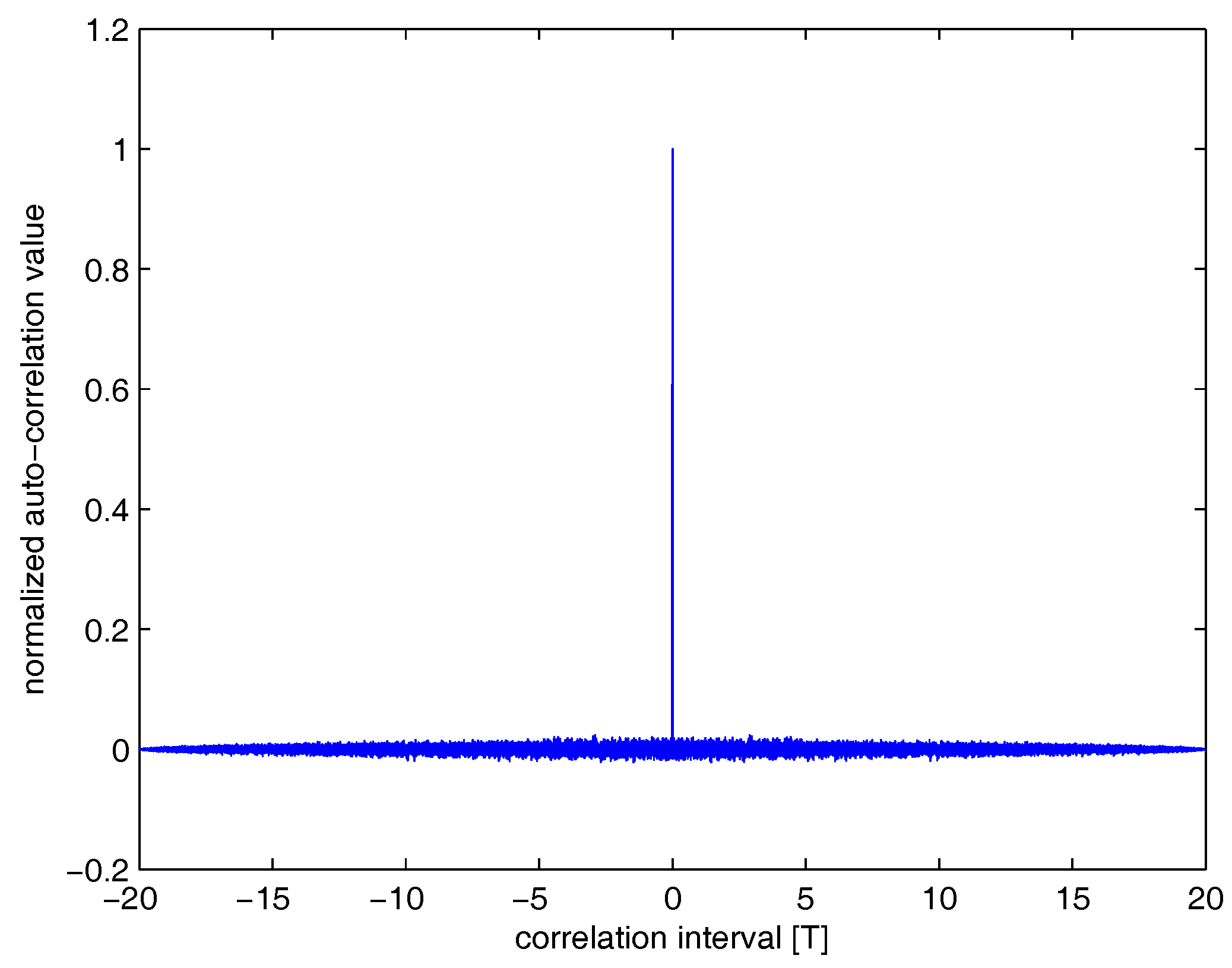
where and the discrete state s remains unaltered until the next switching pulse. Figure 1a shows the switching pulse waveform for the hybrid system with . Figure 1b shows the continuous state, the corresponding discrete symbols and the states at the switching interval by blue solid line, red dotted line, and black dot marks, respectively. The dynamics of the hybrid system are chaotic, characterized by the positive Lyapunov exponent , obtained both analytically and from a time series [32,34]. The auto-correlation function of the continuous signal is given in Figure 2, which has a typical pulse-like auto-correlation function. These quantities indicate that the signal generated from the first order hybrid dynamical system is chaotic.
2.2. The Matched Filter for the First Order Hybrid System
The matched filter for the corresponding first order hybrid system is given by [32]
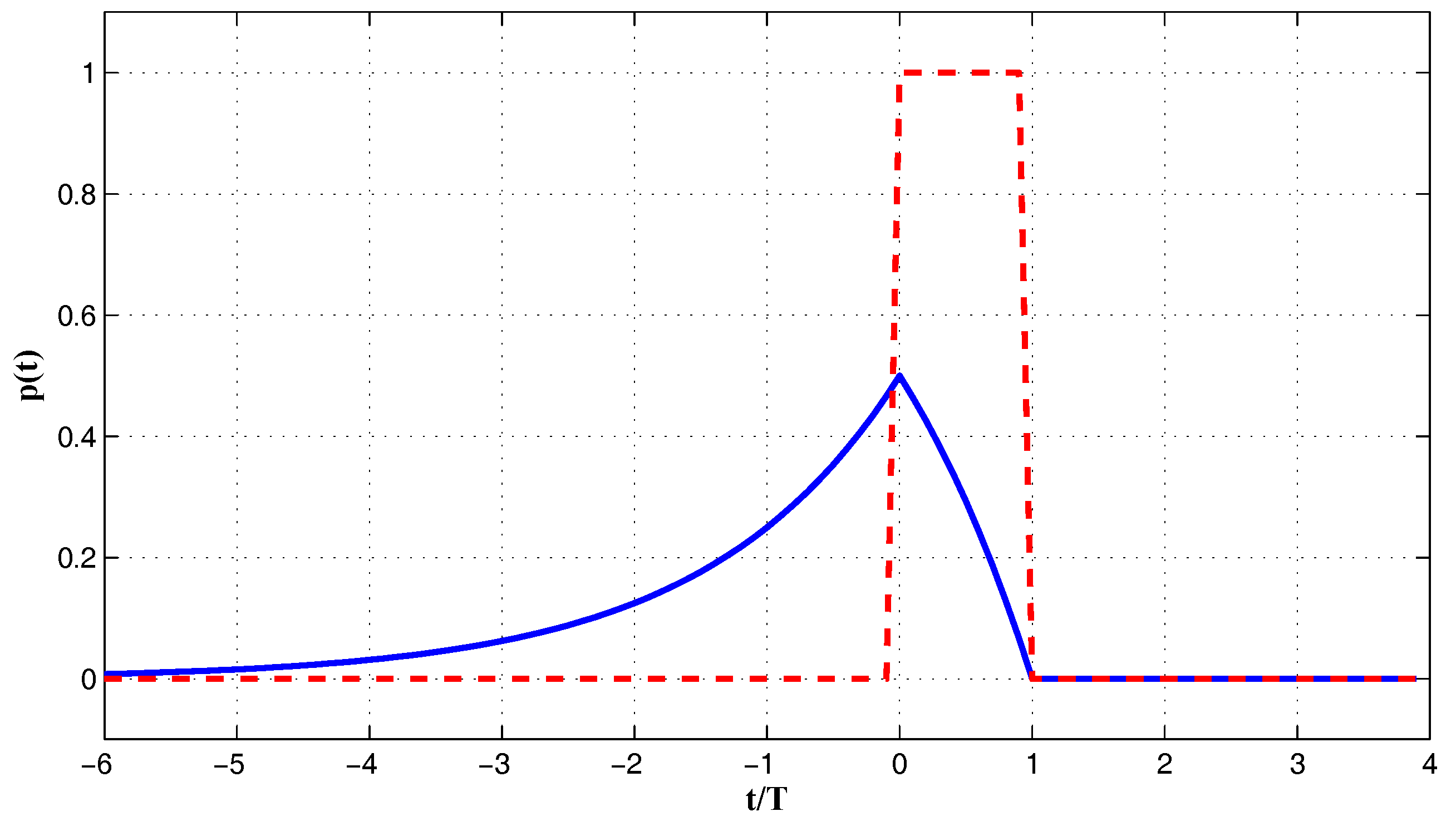
where is the filter input and is the matched filter output. The function is the time reverse of the basis function , given by
which is shown in Figure 3, the red dashed line is the discrete symbol corresponding to the basis function. The matched filter is the optimal coherent filter that maximizes the signal to noise ratio.
2.3. The Proposed DCSK Scheme
The block diagram of the proposed DCSK is shown in Figure 4. In our proposed method, the chaotic reference signal and the information bearing signal are modulated by a sinusoidal signal and a cosine signal with the same frequency, respectively, and then the two modulated signals are added together to form one frame to transmit 1 bit information. In each frame, the separation of the reference and the information bearing signals is performed by orthogonal sinusoidal carriers rather than by the time delay in the conventional DCSK, as done in PS-DCSK. Assume that the bit transmission rate is bits per one second, the corresponding bit duration is , and the symbol rate in the chaotic signal is symbols per one second, then the modulated signal for the kth bit is given by
where is the chaotic state generated by Equation (1), is the kth binary information, is the digital-to-analog (D/A) sampling time, f is the frequency of the sinusoidal signal satisfying , and the spreading gain , is the number of over sampling points for one symbol s, is the number of symbols in the modulated signal used for encoding a bit. Hence, the symbol rate in the chaotic signal is symbols per one second. The kth frame modulated signal is transmitted over the communication channel. At the receiver end, the received signal is demodulated by the corresponding sinusoidal and its orthogonal signal, respectively. The demodulated signals and are given by
and
where is the noise. Then, the two demodulated signals are sent to the matched filters to have filter outputs and , given by Equation (3), respectively. Since the matched filter has the characteristic of a low-pass filter, the high frequency terms (i.e., the second third terms) in Equations (6) and (7) are filtered by the matched filter. Each filter output contains optimal SNR sampling points. The optimal SNR points of the reference and the information bearing signals are obtained by
where . The discrete correlator output for recovering bit is given as
The information bit can be decoded according to the following rule
The transmitted signal in Equation (5) is a wideband signal more robust to the effect of the multipath propagation. A receiver with a low-pass filter can decode the information transmitted as well, but it is a suboptimal choice because the previous works [32,33,34] have shown that the filter in Equation (3) is the optimal coherent matched filter corresponding to the chaotic signal in Equation (1). Equation (3) maximizes the signal to noise ratio at the receiver, thus achieving the lowest BER. The proposed method removes the delay and switch components in both the transmitter and the receiver as compared with the conventional DCSK. Instead it uses the orthogonal signal pair to modulate the reference and the information bearing signals. It helps thus to achieve higher data transmission rate and it does not require the radio-frequency delay equipment in the communication system, which is rather difficult to implement in the current CMOS technology [35]. As a result, the proposed method is easy to be implemented. Moreover, the frequency modulation moves the chaotic signal spectrum to the bandwidth of the communication equipment, which is compatible with the conventional transducer or antenna.
3. Simulation Results and Performance Analysis
In this section, the BER performance of the proposed method is analyzed in both the AWGN channel and the underwater acoustic channel. Moreover, we analyze the BER performance versus the spreading factor in the underwater acoustic channel. The proposed method is also compared with some existing methods to show its superiority.
3.1. The BER performance in the AWGN channel
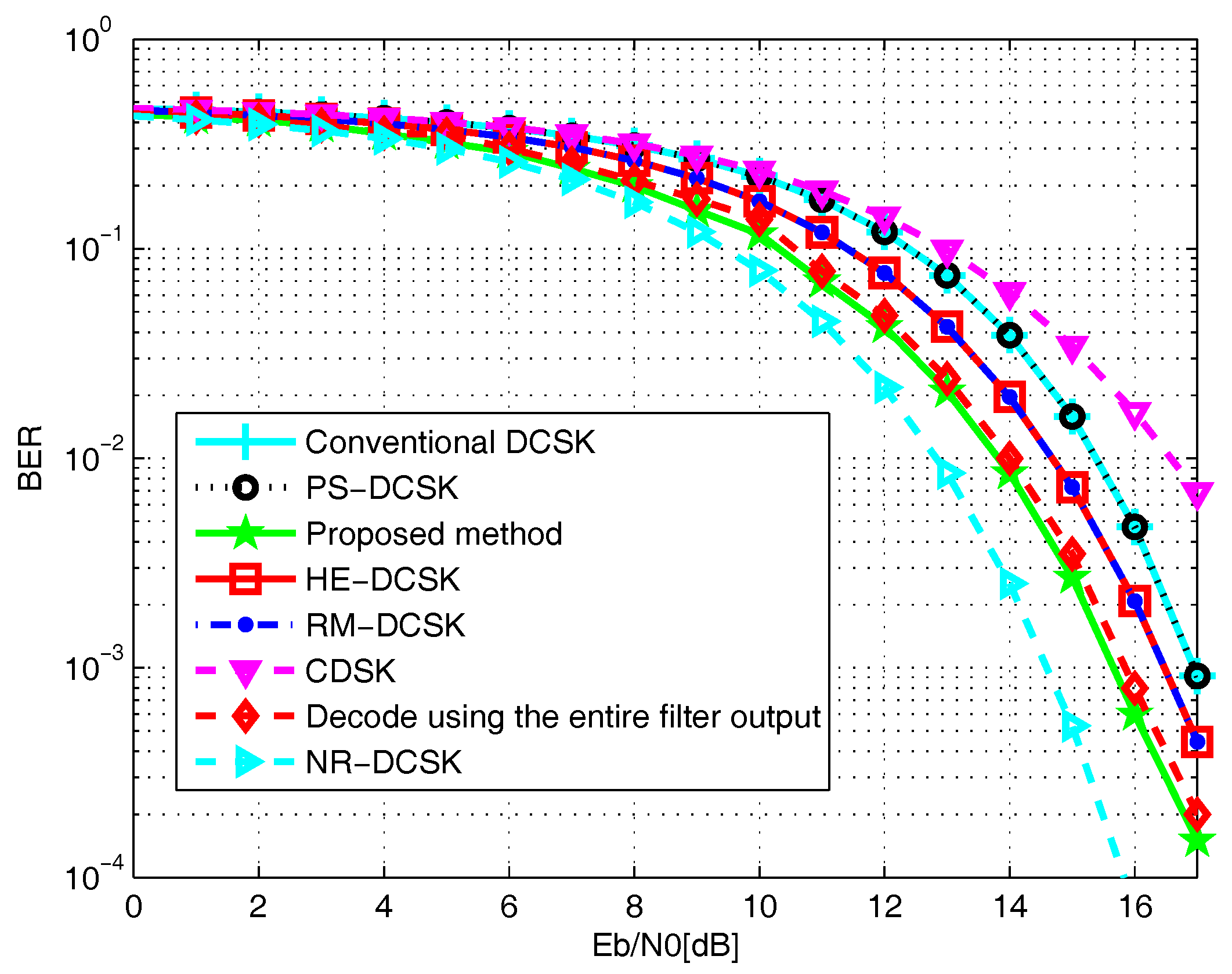
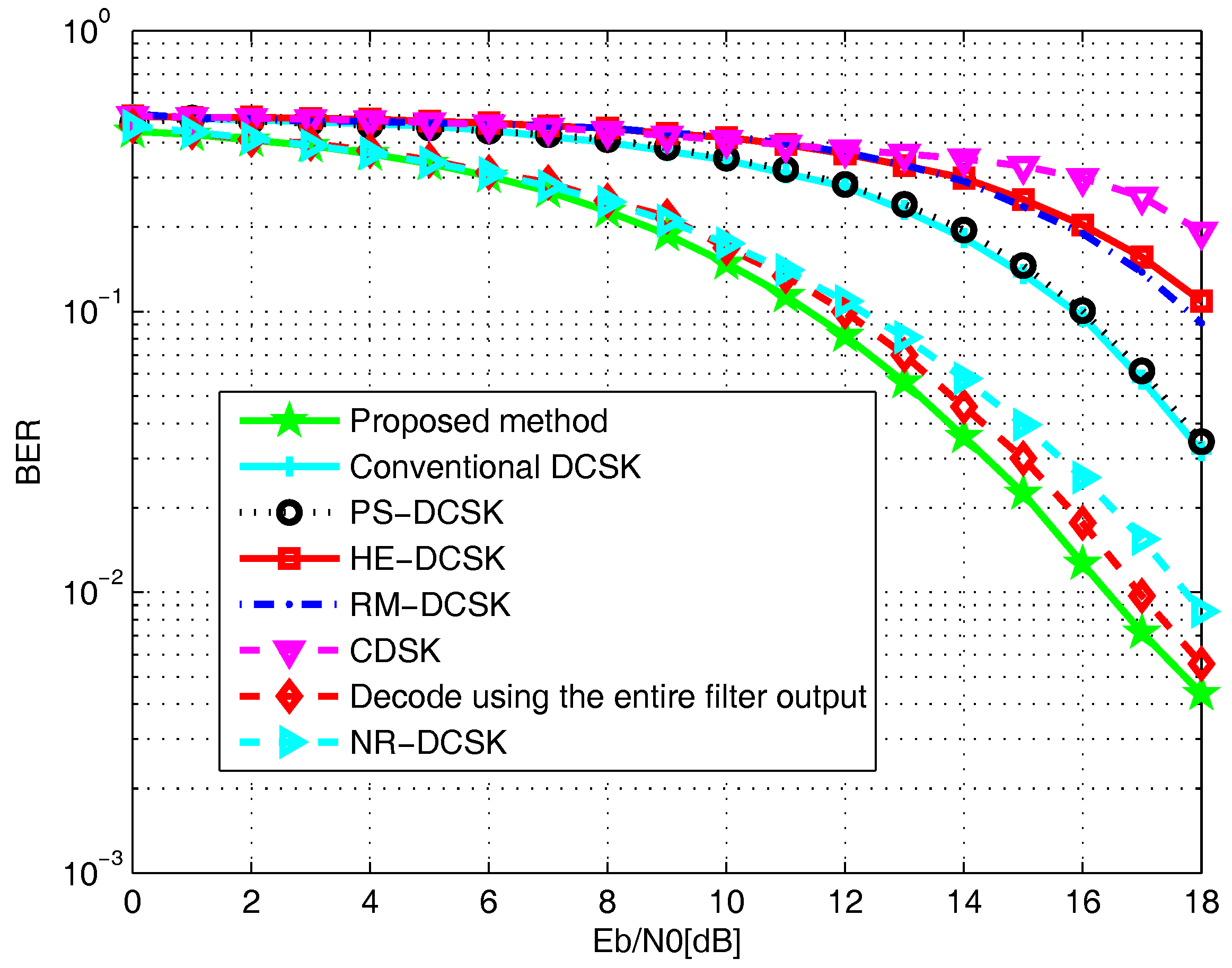
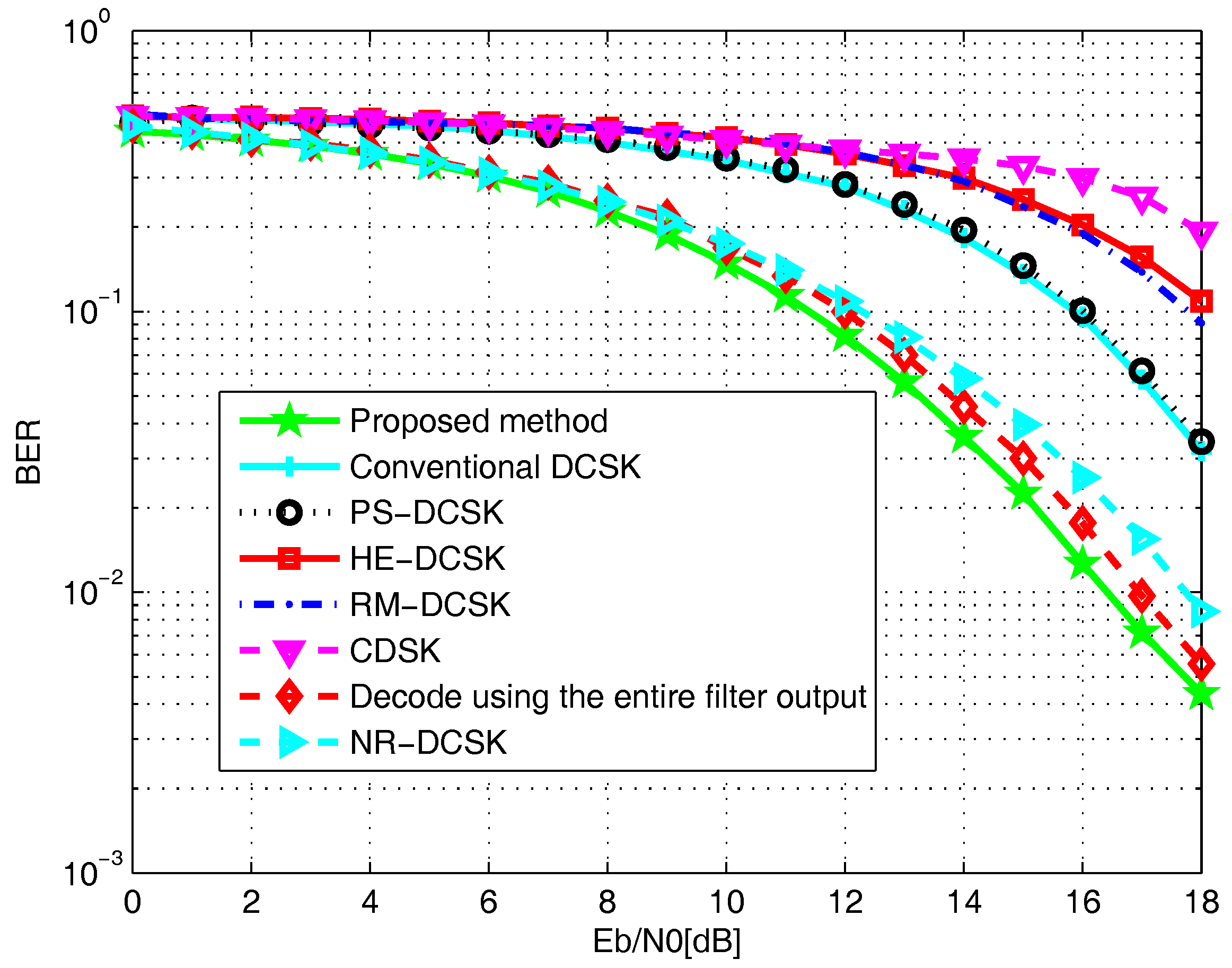
In this section, the conventional DCSK using logistic map [21], NR-DCSK [23], RM-DCSK [27], HE-DCSK [28], PS-DCSK [30], CDSK [31], and the proposed method with the same transmission rate are compared in the AWGN channel with different bit energy to noise power spectral density () ratios. Figure 5 shows BER for the different methods versus with the data transmission rate bits/s, where the spreading gain , , , and the frequency of the sinusoidal signal is kHz. The RM-DCSK [27], HE-DCSK [28], PS-DCSK [30], and CDSK [31] uses the logistic map as the chaotic sequences, and the spreading gain is also in order to achieve the same bit transmission rate. The HE-DCSK and RM-DCSK have lower BER and PS-DCSK has similar BER as compared to the conventional DCSK. CDSK shows the worst BER performance because of the interactions between the reference signal and the information bearing signal, which introduces an inter-symbol interference in the demodulation process at the receiver. NR-DCSK (duplicated times p = 5) has better BER compared to the proposed method. However, the data transmission rate of the NR-DCSK is half of that of the proposed method using p times bandwidth with respect to the proposed method. In particular, similar system structure as the PS-DCSK is used in the proposed method, except for the special first order hybrid system and the corresponding matched filter in our proposed method. Consequently, our proposed method outperforms all other methods (except for the NR-DCSK). The reason is that the hybrid system and the corresponding matched filter are used to obtain maximal SNR at the receiver. Moreover, the correlator of the proposed method uses the optimal SNR points rather than the entire filter output to perform correlation to decode the bit information. The result shows that our proposed method has slightly better BER as compared to the decoding method using the entire filter output [12,36]. This is because the multiple points with maximal SNR convolution operation further reduces the effect of noise.
3.2. The Effect of Spreading Gain on BER
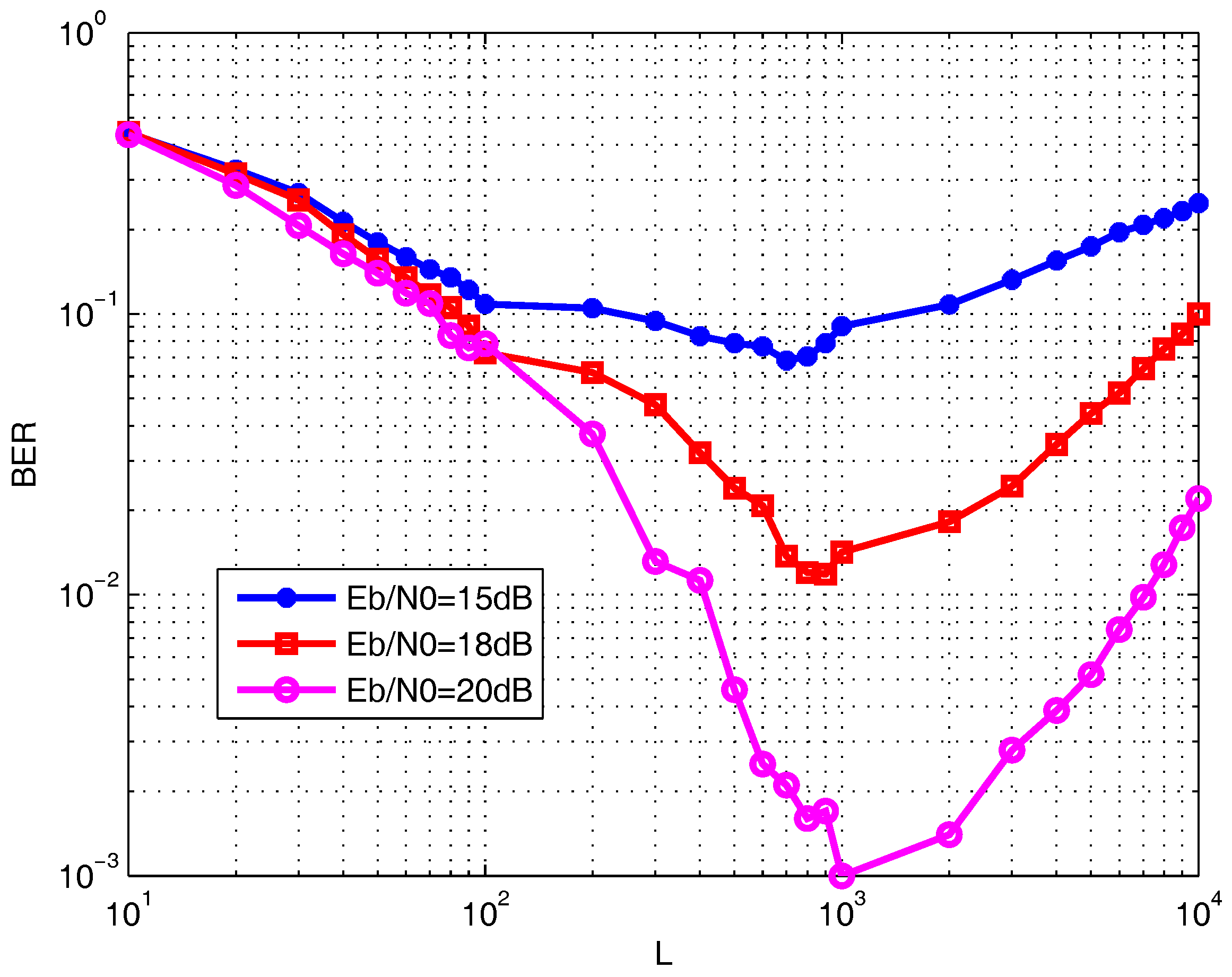
In order to determine the optimal spreading gain for the proposed method over an underwater acoustic channel, the BER performance versus the spreading gain at various ratios is given in Figure 6. Here, the underwater acoustic channel is given by Chitre [37], which is proved to be consistent with sea measurements. The channel parameters are given in Table A1 in the Appendix. The characteristics of the underwater acoustic channel require the communication system to be more robust as compared to a free space wireless communication system. We find that there is an optimal spreading gain for the lowest BER at a fixed , and the optimal spreading gain varies slightly with different , as shown in Figure 6. This figure provides the optimal spread gain as 1000, considered in our simulations.
3.3. The BER Performance in the Underwater Acoustic Channel
The conventional DCSK [21], NR-DCSK [23], HE-DCSK [28], RM-DCSK [27], PS-DCSK [30], CDSK [31] and the proposed method are simulated over the underwater acoustic channel at different levels. The optimal spreading gain (, ), kHz are used for the proposed method, the conventional DCSK, NR-DCSK, CDSK, HE-DCSK, and RM-DCSK. In Figure 7, the BER curves of the proposed method are compared with other methods for the same transmission rate bits/s. It can be seen from Figure 7 that the BER performance of HE-DCSK and RM-DCSK in the underwater acoustic channel appears to be identical. The DCSK system shows similar BER as compared to PS-DCSK and it appears to be better than those of HE-DCSK, RM-DCSK and CDSK. The reason is that the orthogonality of the chaotic signal in HE-DCSK, RM-DCSK and CDSK is destroyed over the complex channel, increasing the inter-symbol interference of the reference signal and the information bearing signal cross correlation in the correlator outputs. Thus, these methods are less robust in the underwater acoustic channel. In the complicated acoustic channel, the proposed method has better BER performance as compared to NR-DCSK (p = 5) because of the serious distortion caused by the acoustic channel. Moreover, NR-DCSK is an ultra wide band communication method, the larger p, the better BER performance. However, for the underwater acoustic channel, the available bandwidth is very limited, which means the NR-DCSK would not be a better choice for the acoustic communication channel because of the p times bandwidth needed as compared to other DCSKs. Thereby, the proposed method shows the best performance by using the discrete optimal SNR points to decode the information, which is superior to our perviously proposed decoding method using entire filter output [12]. The matched filter and optimal SNR points correlation relieves the effect of interference caused by multipath propagation and ambient noise.
4. Conclusions
In this paper, a DCSK scheme based on a first order hybrid chaotic system is being proposed for the underwater acoustic channel. Different from the conventional DCSK and its enhanced versions that utilize the orthogonality property of the chaotic signal to recover the bit information from the highly distorted receiving signal, the proposed method uses sinusoidal and its orthogonal waveforms to separate the reference signal and the information bearing signal. It not only yields doubled data transmission rate as compared to the conventional DCSK with the same spreading gain, but also reduces the complexity of the communication system by removing the delay component that is difficult to implement in CMOS technology. It also moves the chaotic signal spectrum to adapt to the bandwidth of the communication equipment so that the modulated signal can be compatible with the conventional transducer or antenna. Our proposed method is insensitive to channel distortion and does not require chaotic synchronization, channel estimation and complicated equalization algorithm. It achieves better BER performance than the conventional DCSK, CDSK, HE-DCSK, PS-DCSK and RM-DCSK in both the AWGN channel and the underwater acoustic channel. It is credited to the use of the special chaotic waveforms and the corresponding matched filter. The matched filter reduces the effects of noise and multipath propagation. Then, the correlation operation using the points with maximal SNR further improves the BER performance. Hence, the proposed method achieves better communication reliability, especially for the complex underwater acoustic channel. A future work will be to extend the present method to more complicated underwater acoustic channels [8,9] and to validate experimentally the proposed method in a lake or a sea trial. We also plan to investigate the method to improve the data transmission rate (such as using the Orthogonal Frequency Division Multiplexing technique). Finally, the chaotic oscillator uses an external clock to control the switching states of the system. It avoids the timing jitter or phase noise of the electronic oscillator circuit, which ensures the frequency stability of the chaotic signal and provides the possibility of eliminating sampling errors among the different transmission frames in a complex underwater time-varying acoustic channel. All that has additional practical benefits for communication applications.
Acknowledgments
This research is supported in part by National Natural Science Foundation of China (61172070), Innovative Research Team of Shaanxi Province (2013KCT-04), The Key Basic Research Fund of Shaanxi Province (2016ZDJC-01), EPSRC (EP/I032606/1), Chao Bai was supported by Excellent Ph.D. research fund (310-252071603) at XAUT.
Author Contributions
Chao Bai did the simulations and wrote the draft paper; Hai-Peng Ren designed the project and the simulation framework, analysed the results and wrote the paper; Celso Grebogi wrote the paper and discussed the problem; Murilo S. Baptista analysed the simulation results and contributed to writing the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. The Underwater Acoustic Channel
The characteristics of the underwater acoustic channel are given in References [14,37], and the parameters used in this paper are given here in Table A1.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Parameters for the underwater acoustic channel.
| Parameter Name | Parameter Value |
|---|---|
| sea depth h | 100 m |
| temperature of seawater T | 20 °C |
| transmitter depth | 30 m |
| receiver depth | 80 m |
| propagation distance R | 1000 m |
| seawater sound speed c | 1539 m/s |
| seabed sound speed | 1650 m/s |
| seawater density | 1023 kg/m |
| seabed density | 1500 kg/m |
| seawater salinity S | 35 ppt |
| transducer RMS movement | 0.25 m |
| number of multiple paths | 6 |
| path 1 with surface/bottom reflections s b | 2 1 |
| path 2 with surface/bottom reflections s b | 1 2 |
| path 3 with surface/bottom reflections s b | 3 2 |
| path 4 with surface/bottom reflections s b | 3 4 |
| path 5 with surface/bottom reflections s b | 2 3 |
References
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater Acoustic Wireless Sensor Networks: Advances and Future Trends in Physical, MAC and Routing Layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.L.; Huang, J.G.; Tang, C.K.; Song, H.B. Time Reversal Aided Bidirectional OFDMUnderwater Cooperative Communication Algorithm with the Same Frequency Transmission. J. Sens. 2017, 2017, 1–8. [Google Scholar]
- Wei, Z.X.; Song, M.; Yin, G.S.; Song, H.B.; Wang, H.B.; Ma, X.F.; Cheng, A.M.K. Data Access Based on a Guide Map of the Underwater Wireless Sensor Network. Sensors 2017, 17, 2374. [Google Scholar] [CrossRef] [PubMed]
- Diamant, R.; Lampe, L.; Gamroth, E. Bounds for Low Probability of Detection for Underwater Acoustic Communication. IEEE J. Ocean. Eng. 2017, 42, 143–155. [Google Scholar] [CrossRef]
- Wei, Z.X.; Song, M.; Yin, G.S.; Wang, H.B.; Ma, X.F.; Song, H.B. Cross Deployment Networking and Systematic Performance Analysis of Underwater Wireless Sensor Networks. Sensors 2017, 17, 1619. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.; Rong, Y.; Nordholm, S.; He, Z.Q.; Duncan, A.J. Joint Channel Estimation and Impulsive Noise Mitigation in Underwater Acoustic OFDM Communication Systems. IEEE Wirel. Commun. 2017, 16, 6165–6178. [Google Scholar] [CrossRef]
- Ren, H.P.; Baptista, M.S.; Grebogi, C.I. Chaotic Signals in Digital Communications; Eisencraft, M., Attux, R., Suyama, R., Eds.; CRC press: Boca Raton, FA, USA, 2014; pp. 423–437. ISBN 9781466557222. [Google Scholar]
- Paul, A.W. Propagation and Scattering Effects in Underwater Acoustic Communication Channels. IEEE J. Ocean. Eng. 2013, 38, 614–631. [Google Scholar]
- Paul, A.W.; Francois, X.S.; Roald, O.; Trond, J. The Watermark Benchmark for Underwater Acoustic Modulation Schemes. IEEE J. Ocean. Eng. 2017, 42, 1007–1018. [Google Scholar]
- Ren, H.P.; Baptista, M.S.; Grebogi, C. Wireless communication with chaos. Phys. Rev. Lett. 2013, 110, 184101. [Google Scholar] [CrossRef] [PubMed]
- Kaddoum, G. Wireless chaos-based communication systems: A comprehensive survey. IEEE Access 2016, 4, 2621–2648. [Google Scholar] [CrossRef]
- Ren, H.P.; Bai, C.; Liu, J.; Baptista, M.S.; Grebogi, C. Experimental validation of wireless communication with chaos. Chaos 2016, 26, 083117. [Google Scholar] [CrossRef] [PubMed]
- Ren, H.P.; Baptista, M.S.; Grebogi, C. Uncovering missing symbols in communication with filtered chaotic signal. Int. J. Bifurc. Chaos 2012, 22, 1250119. [Google Scholar] [CrossRef]
- Ren, H.P.; Bai, C.; Kong, Q.J.; Baptista, M.S.; Grebogi, C. A chaotic spread spectrum system for underwater acoustic communication. Physica A 2017, 478, 77–92. [Google Scholar] [CrossRef]
- Yao, J.L.; Li, C.; Ren, H.P.; Grebogi, C. Chaos-based wireless communication resisting multipath effects. Phys. Rev. E 2017, 96, 032226. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Yao, Y.D. Detection performance of chaotic spreading LPI waveforms. IEEE Wirel. Commun. 2005, 4, 390–396. [Google Scholar]
- Cai, G.F.; Wang, L.; Chen, G.R. Capacity of the non-coherent DCSK system over Rayleigh fading channel. IET Commun. 2016, 10, 2663–2669. [Google Scholar] [CrossRef]
- Ren, H.P.; Bai, C. Secure communication based on spatiotemporal chaos. Chin. Phys. B 2015, 20, 080503. [Google Scholar] [CrossRef]
- Ren, H.P.; Bai, C.; Huang, Z.Z.; Grebogi, C. Secure Communication Based on HyperChaotic Chen System with Time Delay. Int. J. Bifurc. Chaos 2017, 27, 1750076. [Google Scholar] [CrossRef]
- Ren, H.P.; Bai, C.; Tian, K.; Grebogi, C. Dynamics of delay induced composite multi-scroll attractor and its application in encryption. Int. J. Non-Linear Mech. 2017, 94, 334–342. [Google Scholar] [CrossRef]
- Lau, F.C.M.; Tse, C.K.I. Chaos-Based Digital Communication Systems: Operating Principles, Analysis Methods, and Performance Evaluation; Lau, F.C.M., Tse, C.K., Eds.; Springer-Verlag Press: Heidelberg, Germany, 2003; ISBN 9783642056161. [Google Scholar]
- Kolumbán, G.; Vizvári, B.; Schwarz, W.; Abel, A. Differential chaos shift keying: A robust coding for chaos communication. Proc. Int. Workshop Nonlinear Dyn. Electron. Syst. 1996, 96, 87–92. [Google Scholar]
- Nguyen, B.V.; Jung, H.; Kim, K. On the Anti-Jamming Performance of the NR-DCSKSystem. arXiv, 2017; arXiv:1711.05417v1. [Google Scholar]
- Fang, Y.; Han, G.J.; Chen, P.P.; Lau, F.C.M.; Chen, G.R.; Wang, L. A survey on DCSK-Based communication systems and their application to UWB scenarios. IEEE Access 2016, 18, 1804–1837. [Google Scholar] [CrossRef]
- Kaddoum, G.; Soujeri, E.; Arcila, C.; Eshteiwi, K. I-DCSK: An improved noncoherent communication system architecture. IEEE Trans. Circ. Syst. II 2015, 62, 901–905. [Google Scholar] [CrossRef]
- Kaddoum, G.; Tran, H.V.; Kong, L.; Atallah, M. Design of simulations wireless information and power transfer scheme for short reference DCSK communication systems. IEEE Trans. Commun. 2017, 65, 431–443. [Google Scholar]
- Yang, H.; Jiang, G.P. Reference-Modulated DCSK: A novel chaotic communication scheme. IEEE Trans. Circ. Syst. II 2013, 60, 232–236. [Google Scholar] [CrossRef]
- Yang, H.; Jiang, G.P. High-Efficiency differential chaos shift keying scheme for chaos-based noncoherent communication. IEEE Trans. Circ. Syst. II 2012, 59, 312–316. [Google Scholar] [CrossRef]
- Kaddoum, G.; Gagnon, F. Design of a High-Data-Rate differential chaos-shift keying system. IEEE Trans. Circ. Syst. II 2012, 59, 448–452. [Google Scholar] [CrossRef]
- Yang, H.; Jiang, G.P.; Duan, J.Y. Phase-Separated DCSK: ASimple Delay-Component-Free Solution for Chaotic Communications. IEEE Trans. Circ. Syst. II 2014, 61, 967–971. [Google Scholar] [CrossRef]
- Sushchik, M.; Tsimring, L.S.; Volkovskii, A.R. Performance analysis of correlation-based communication schemes utilizing chaos. IEEE Trans. Circ. Syst. I 2000, 47, 1684–1691. [Google Scholar] [CrossRef]
- Corron, N.J.; Cooper, R.M.; Blakely, J.N. Analytically solvable chaotic oscillator based on a first-order filter. Chaos 2016, 26, 023104. [Google Scholar] [CrossRef] [PubMed]
- Corron, N.J.; Blakely, J.N. Chaos in optimal communication waveforms. Proc. R. Soc. A 2015, 471, 20150222. [Google Scholar] [CrossRef]
- Corron, N.J.; Blakely, J.N.; Stahl, M.T. A matched filter for chaos. Chaos 2010, 20, 023123. [Google Scholar] [CrossRef] [PubMed]
- Xu, W.K.; Wang, L.; Kolumbán, G. A novel differential chaos shift keying modulation scheme. Int. J. Bifurcat. Chaos 2011, 21, 799–814. [Google Scholar] [CrossRef]
- Liu, L.D.; Wang, Y.N.; Hou, L.; Feng, X.R. Easy encoding and low bit-error-rate chaos communication system based on reverse-time chaotic oscillator. IET Signal Process. 2017, 11, 869–876. [Google Scholar] [CrossRef]
- Chitre, M. A high-frequency warm shallow water acoustic communications channel model and measurements. Acoust. Soc. Am. 2007, 122, 2580–2586. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
The waveform states of the hybrid system. (a) The periodic switching pulse; (b) The continuous state, discrete state, and state at the switching point of the hybrid system.
Figure 1.
The waveform states of the hybrid system. (a) The periodic switching pulse; (b) The continuous state, discrete state, and state at the switching point of the hybrid system.
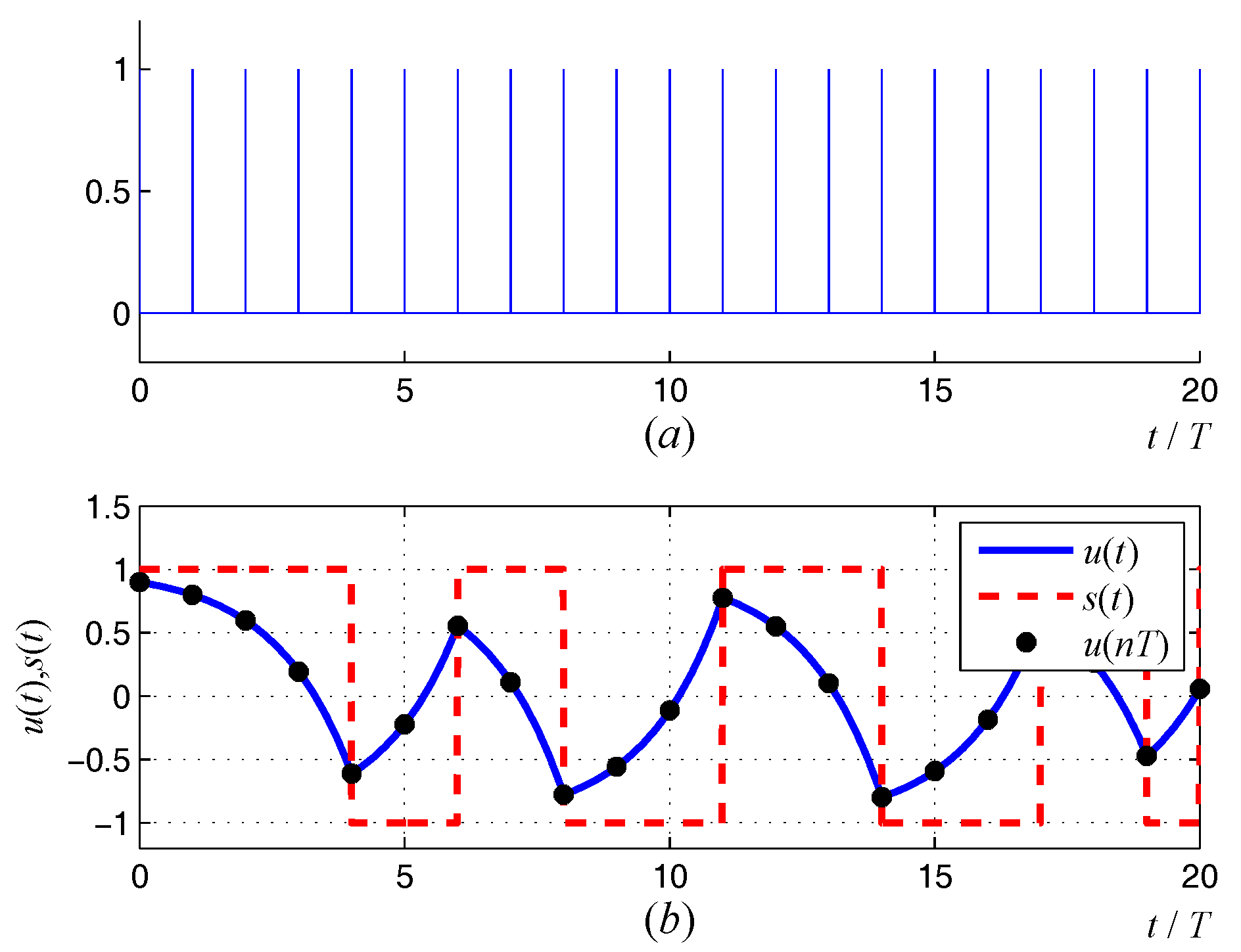
Figure 2.
The auto-correlation of the continuous state of the chaotic system.
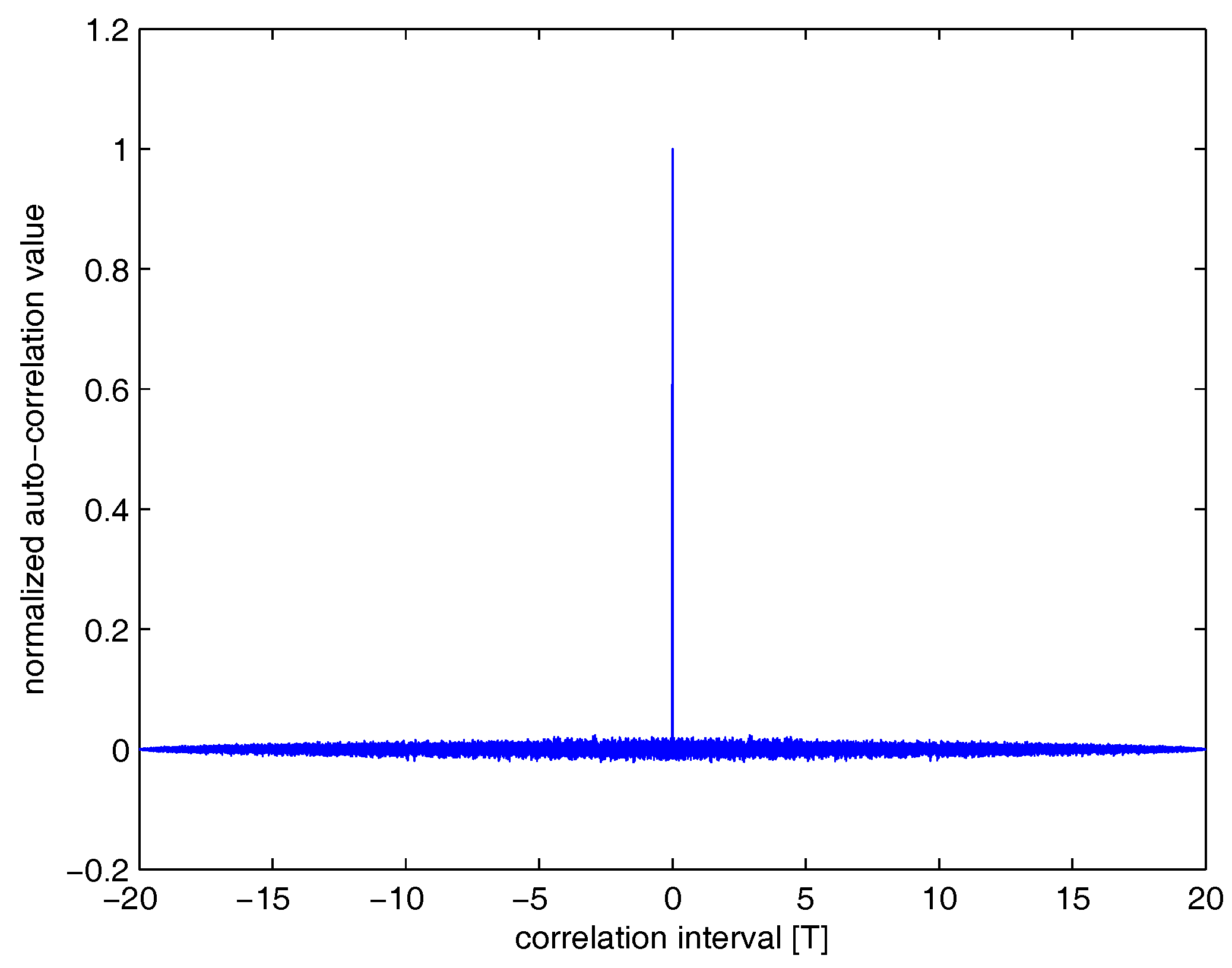
Figure 3.
Basis function and discrete symbol.
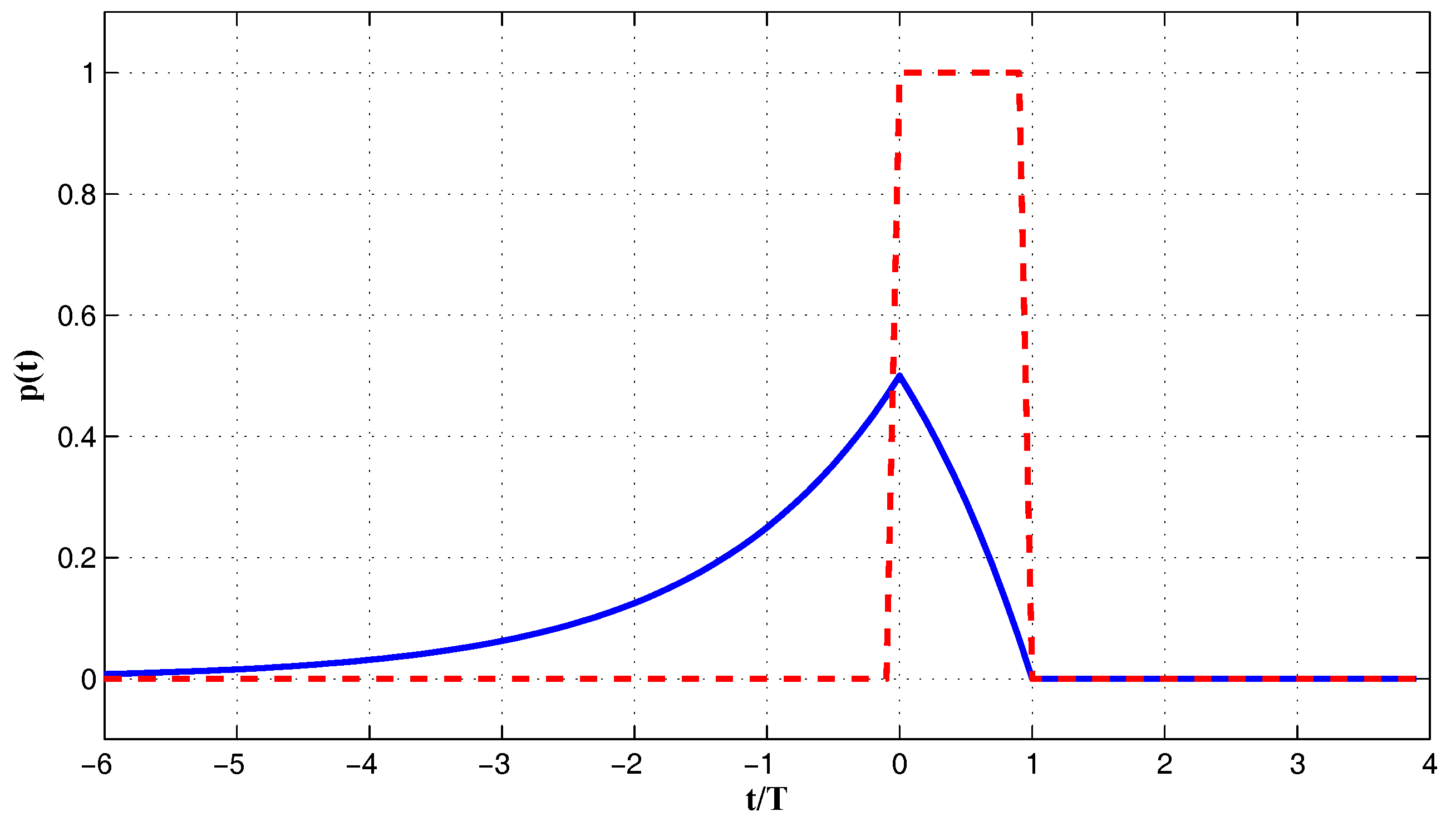
Figure 4.
Block diagram of the proposed scheme.

Figure 5.
BER versus for conventional DCSK, NR-DCSK, HE-DCSK, RM-DCSK, PS-DCSK, CDSK and the proposed method over AWGN channel.
Figure 5.
BER versus for conventional DCSK, NR-DCSK, HE-DCSK, RM-DCSK, PS-DCSK, CDSK and the proposed method over AWGN channel.

Figure 6.
BER performance versus spreading gain L for the proposed method.
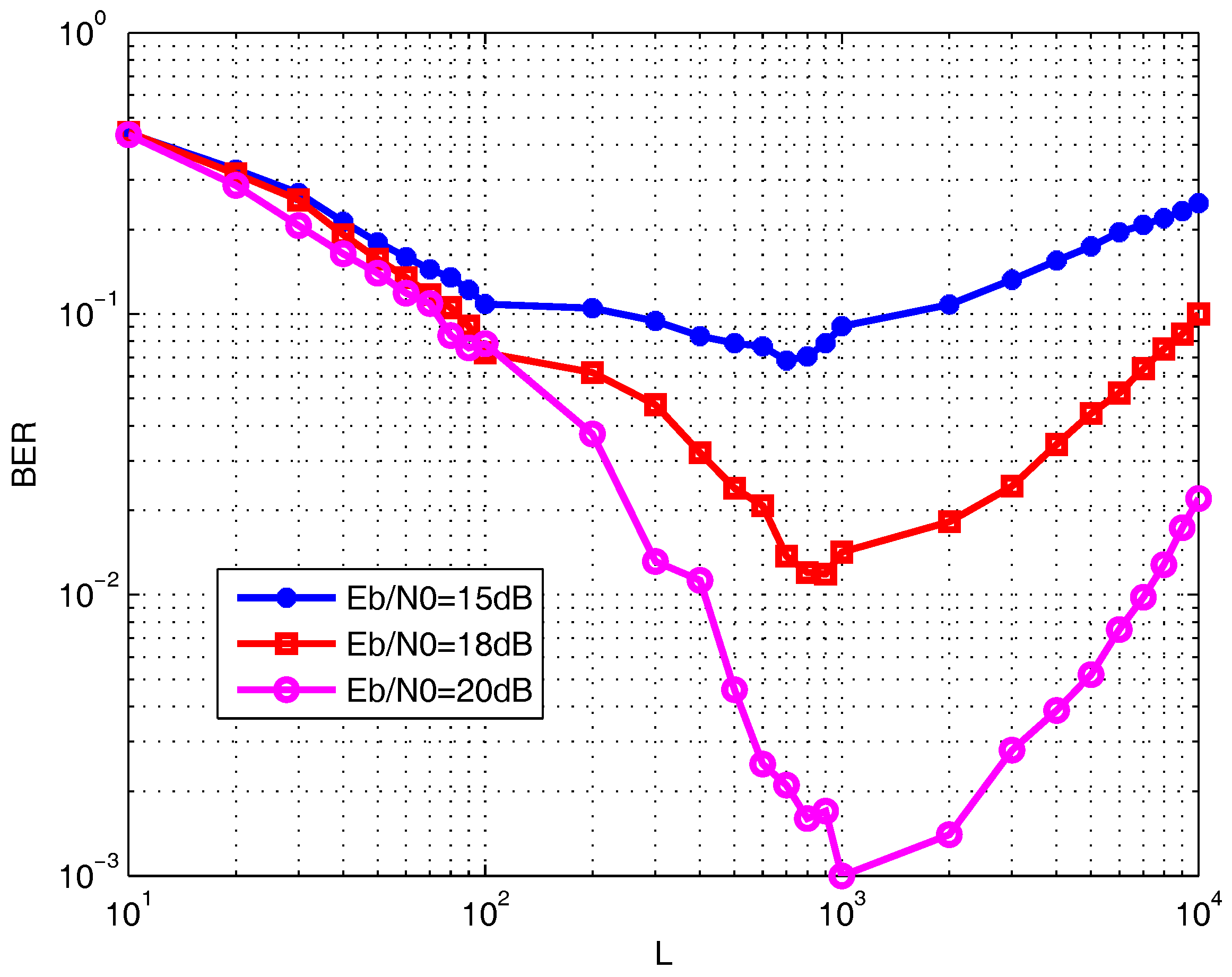
Figure 7.
Performance comparison of conventional DCSK, NR-DCSK, HE-DCSK, RM-DCSK, PS-DCSK, CDSK and the proposed method over the underwater acoustic channel.
Figure 7.
Performance comparison of conventional DCSK, NR-DCSK, HE-DCSK, RM-DCSK, PS-DCSK, CDSK and the proposed method over the underwater acoustic channel.
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Bai, C.; Ren, H.-P.; Grebogi, C.; Baptista, M.S. Chaos-Based Underwater Communication With Arbitrary Transducers and Bandwidth. Appl. Sci. 2018, 8, 162. https://doi.org/10.3390/app8020162
AMA Style
Bai C, Ren H-P, Grebogi C, Baptista MS. Chaos-Based Underwater Communication With Arbitrary Transducers and Bandwidth. Applied Sciences. 2018; 8(2):162. https://doi.org/10.3390/app8020162
Chicago/Turabian StyleBai, Chao, Hai-Peng Ren, Celso Grebogi, and Murilo S. Baptista. 2018. "Chaos-Based Underwater Communication With Arbitrary Transducers and Bandwidth" Applied Sciences 8, no. 2: 162. https://doi.org/10.3390/app8020162
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.