Development of a High-Fidelity Model for an Electrically Driven Energy Storage Flywheel Suitable for Small Scale Residential Applications


Abstract
:1. Introduction
2. Description of Flywheel Energy Storage Systems
2.1. Background
2.2. Structure and Components of FESS: Priciples and Components of FESS
2.2.1. The Rotor
Intermediate Speed Flywheels
2.2.2. Electric Machine
2.2.3. Power Electronics Interface
2.2.4. Bearing System
2.2.5. Containment
3. Characteristics of FESS
4. Applications of FESS
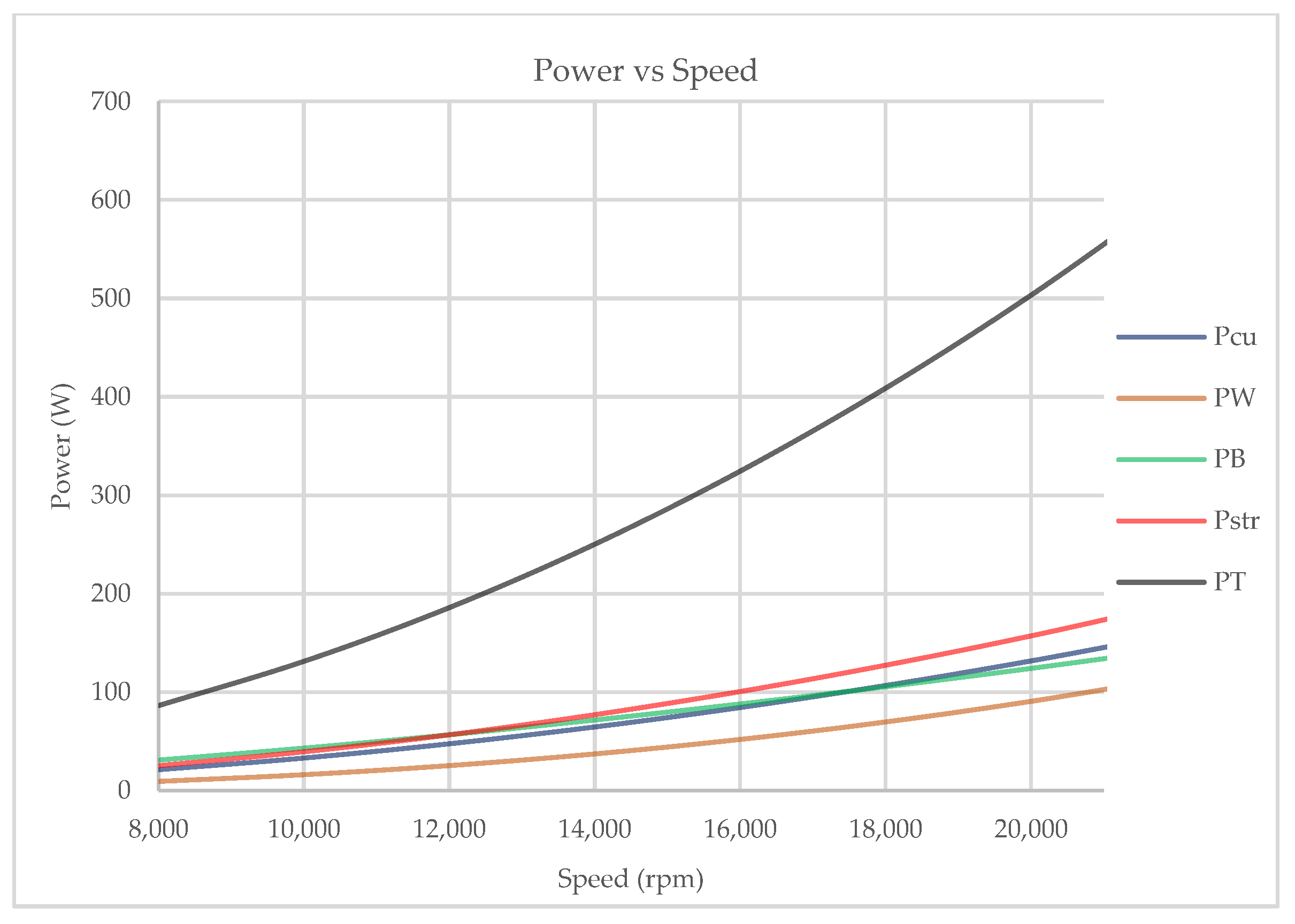
5. Calculation of Losses in FESS
5.1. Copper Loss
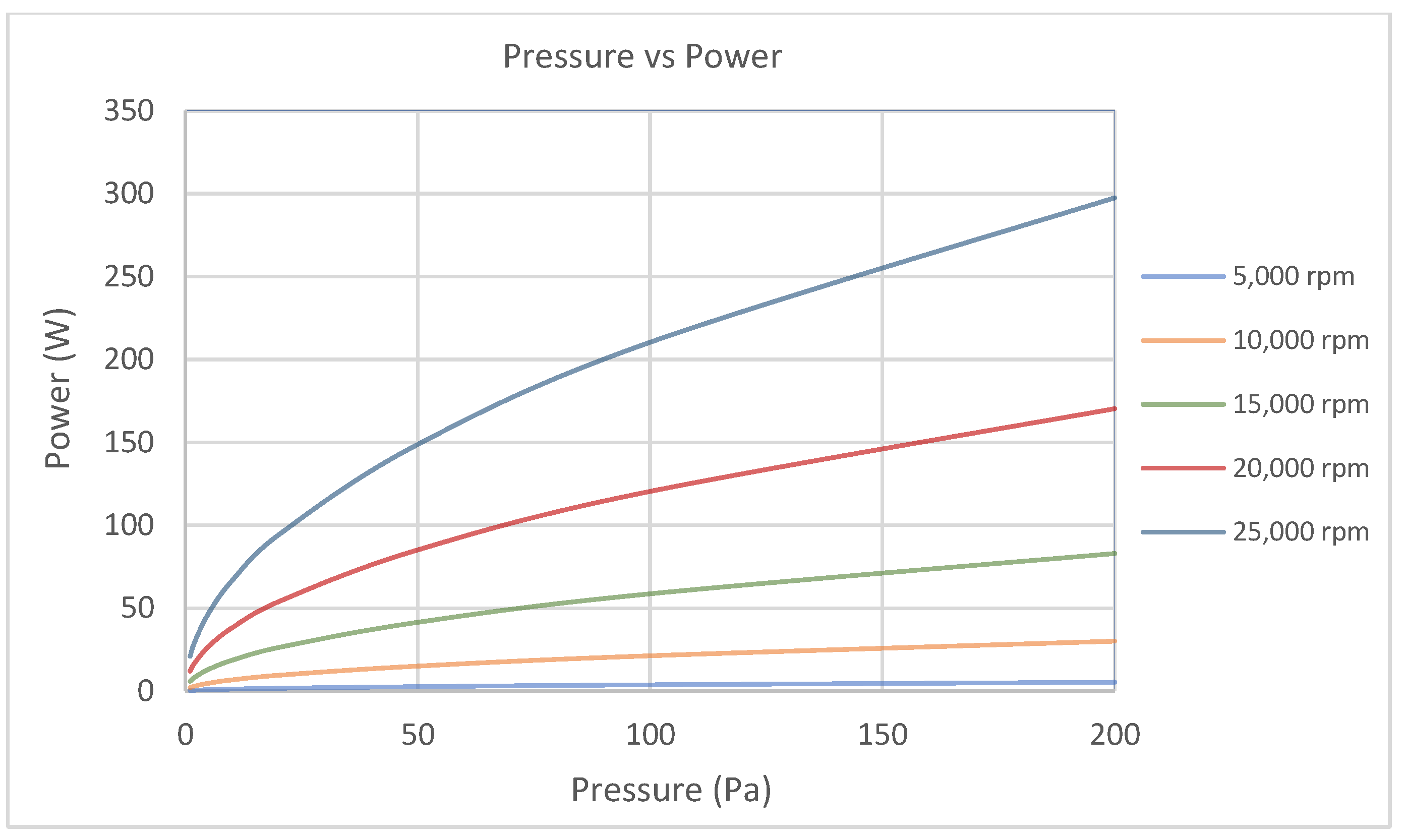
5.2. Mechanical Losses
5.3. Other Losses
- The clearances between stationary and rotating components is small, such that the boundary layers on stationary and rotating surfaces merge.
- The flywheel rotor is assumed to be a drum type steel laminated cylinder.
- The windage losses are calculated under maximum pressure conditions of 100 Pa at 40 °C and maximum speed of 20,000 rpm.
- Density values are calculated from temperature and pressure using ideal gas law.
- Windage on the motor–generator is neglected, since its rotor diameter is much smaller than that of the main rotor, and the power law on diameter for windage is 5.
- Switching loss and IGBT conduction loss in power converters are neglected as these losses are small compared to other losses in a FESS. Although, this might not be the case in some other storage systems, where they may need to be considered.
- It is assumed that the combined axial load on the bearing is 10% of the total flywheel rotor weight with the rest taken by the passive magnetic bearing.
6. Analysis and Control of FESS
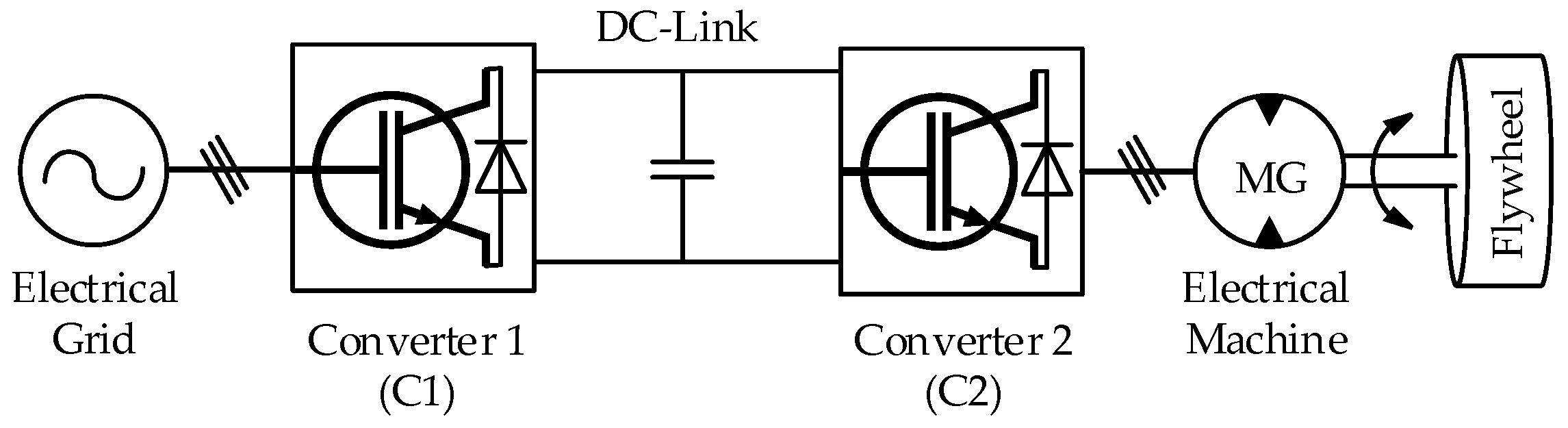
6.1. System Configuration and Mathematical Model
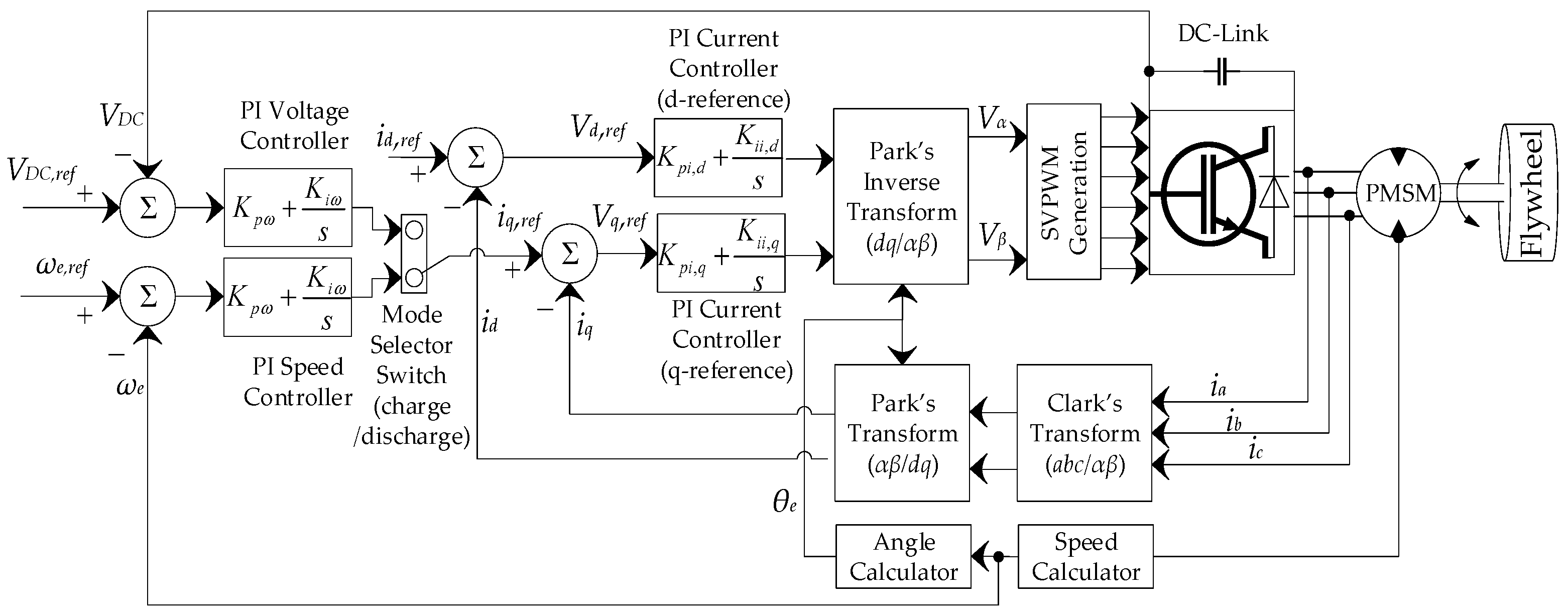
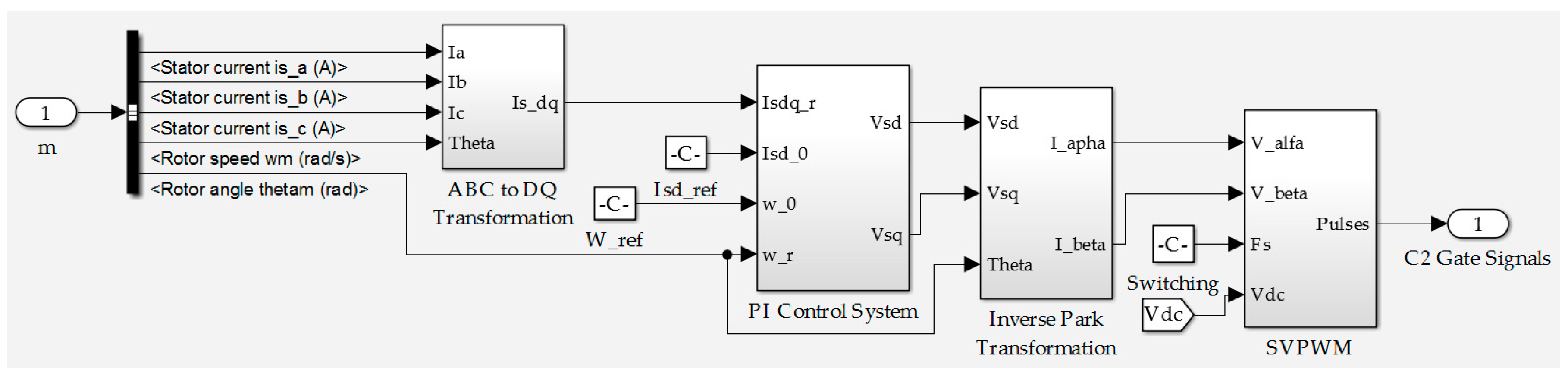
6.2. System Operation and Control Strategy
7. Results Analysis
7.1. System Losses
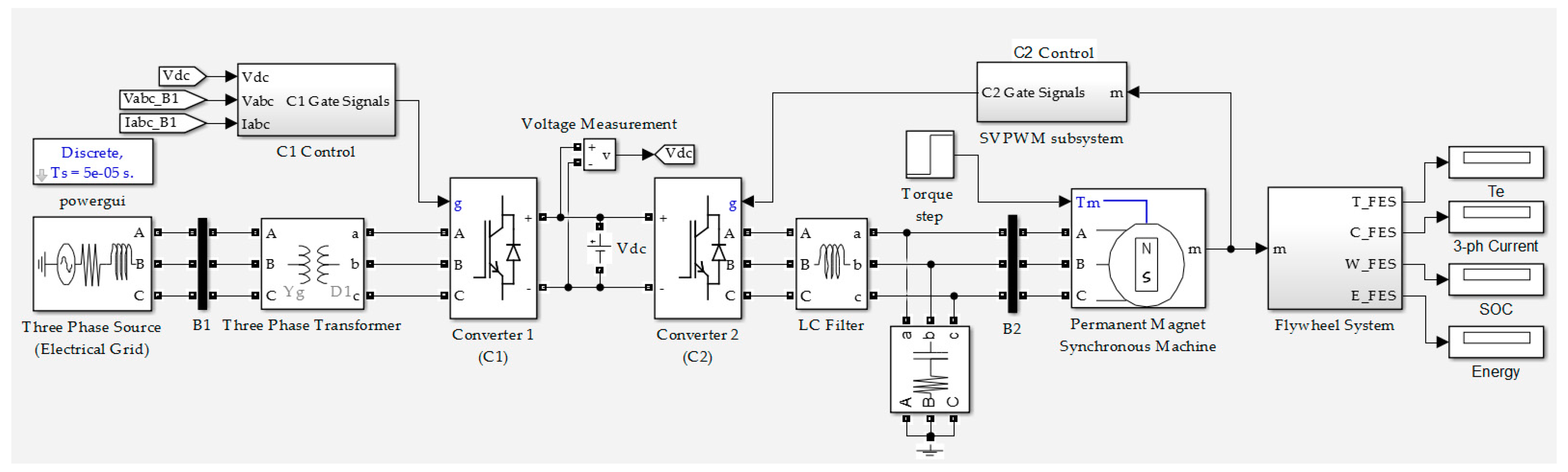
7.2. Simulated Results
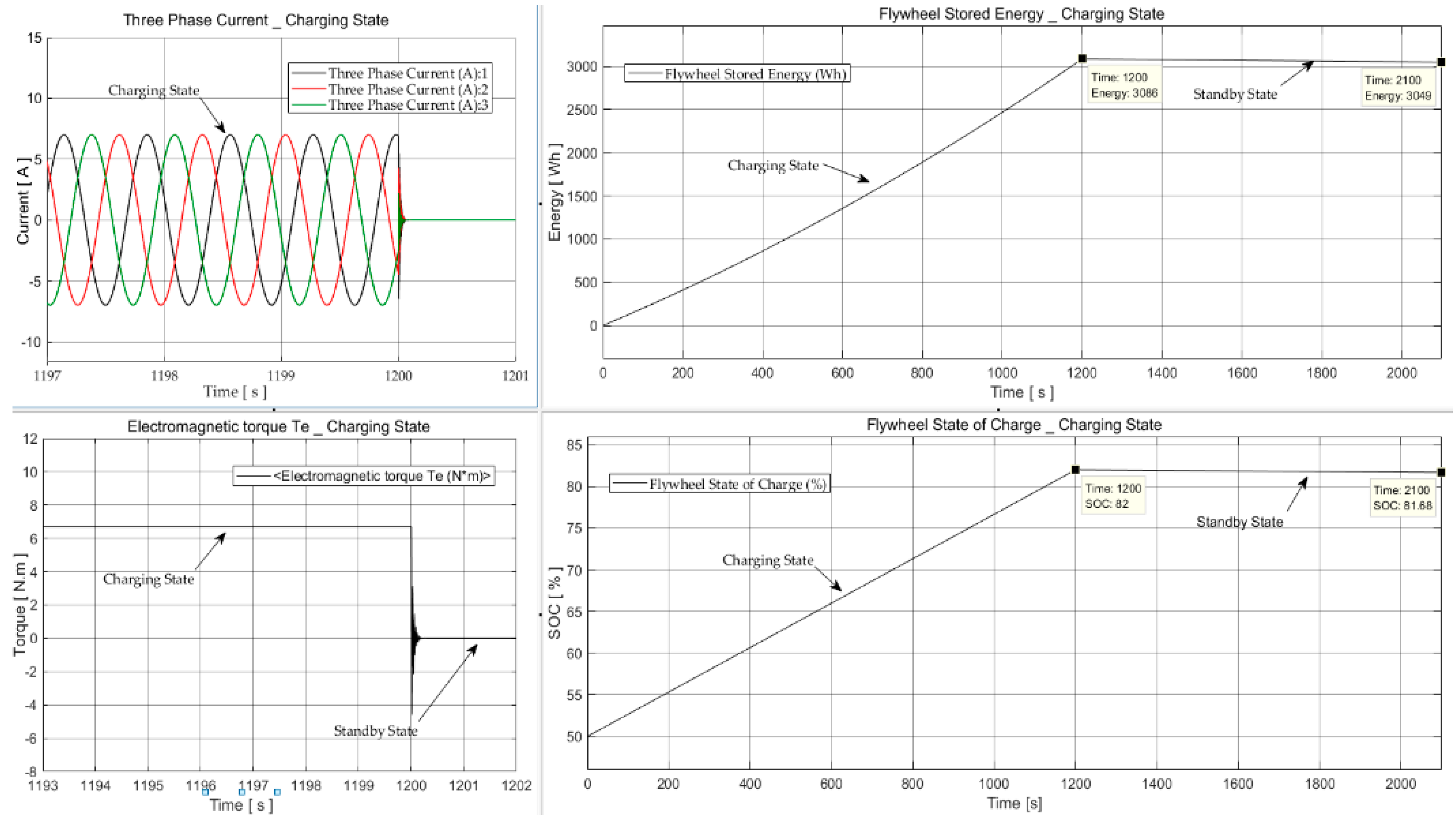
7.2.1. Charging State
7.2.2. Discharging State
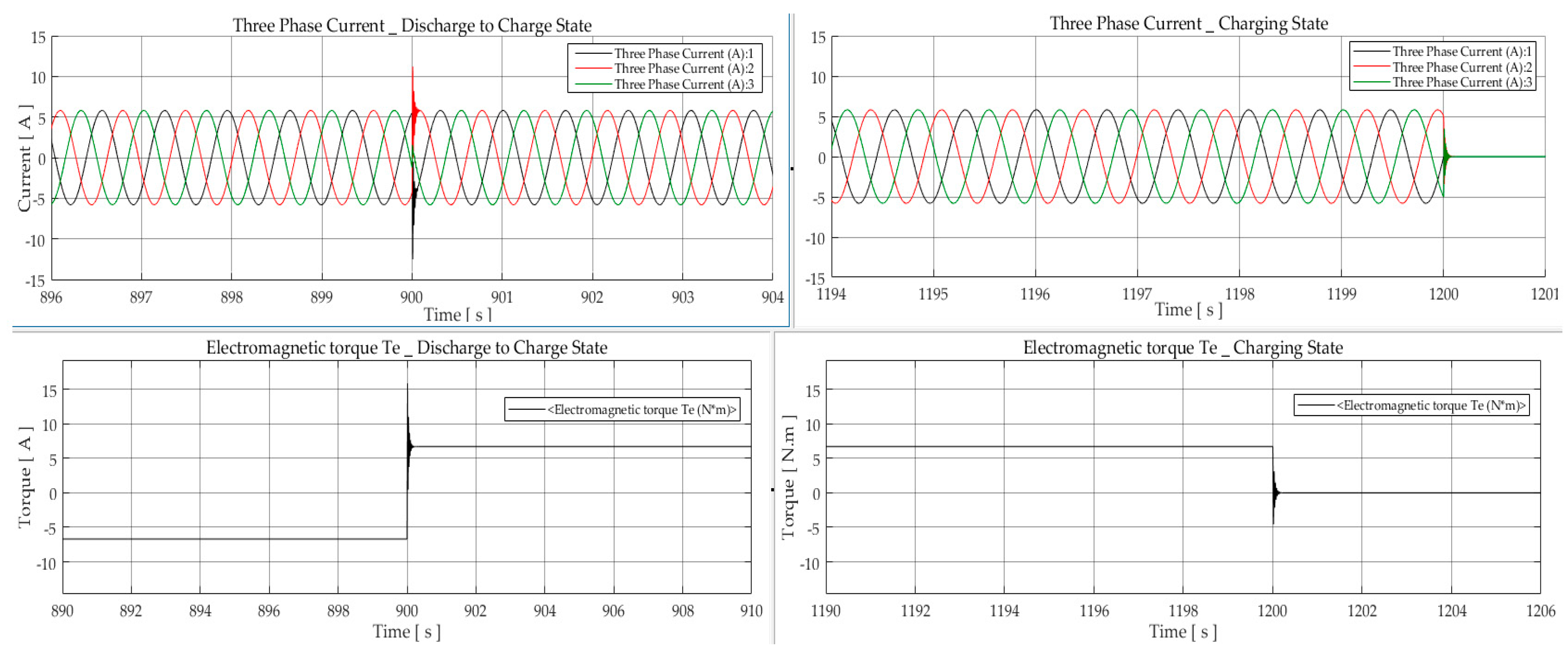
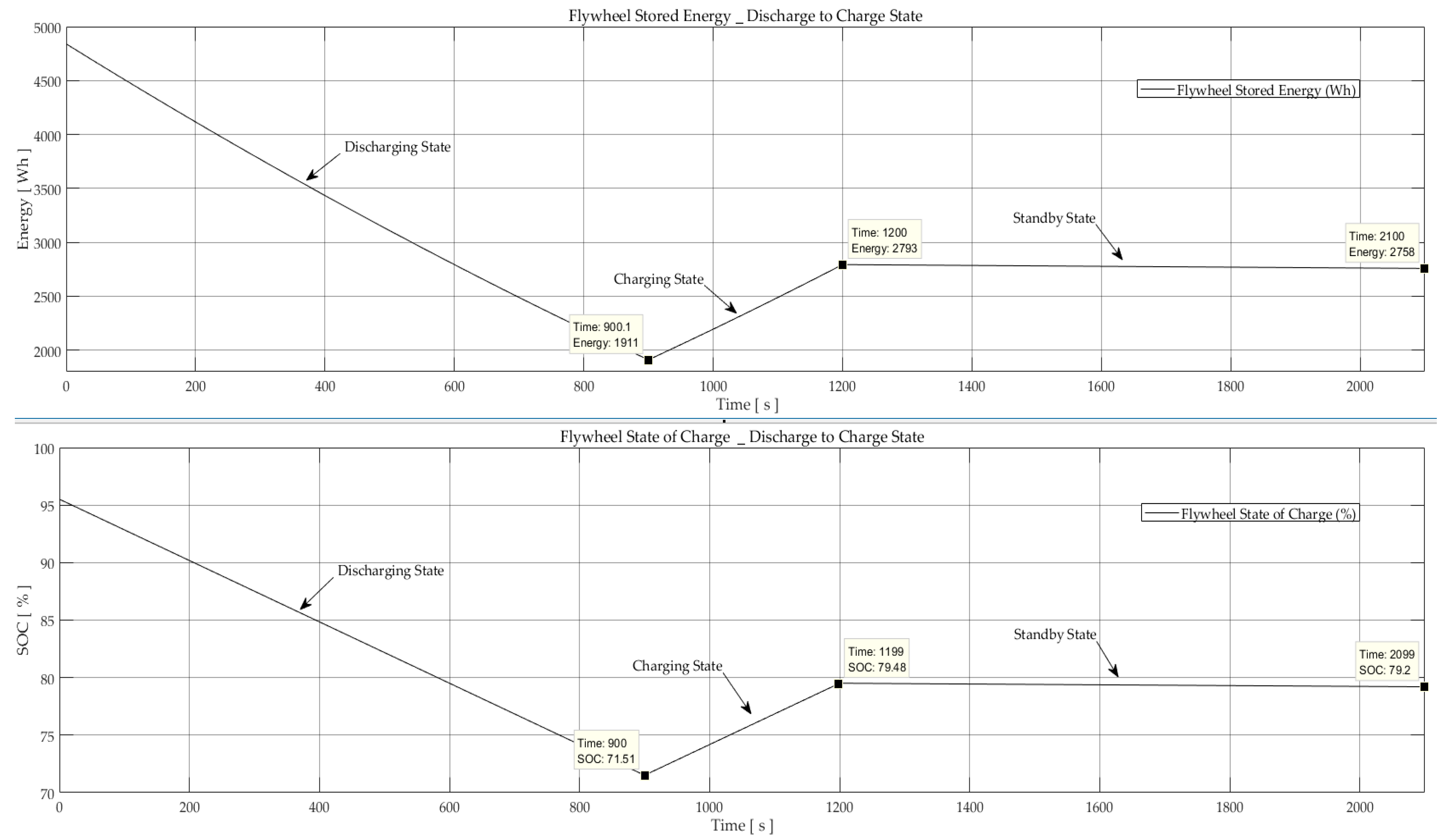
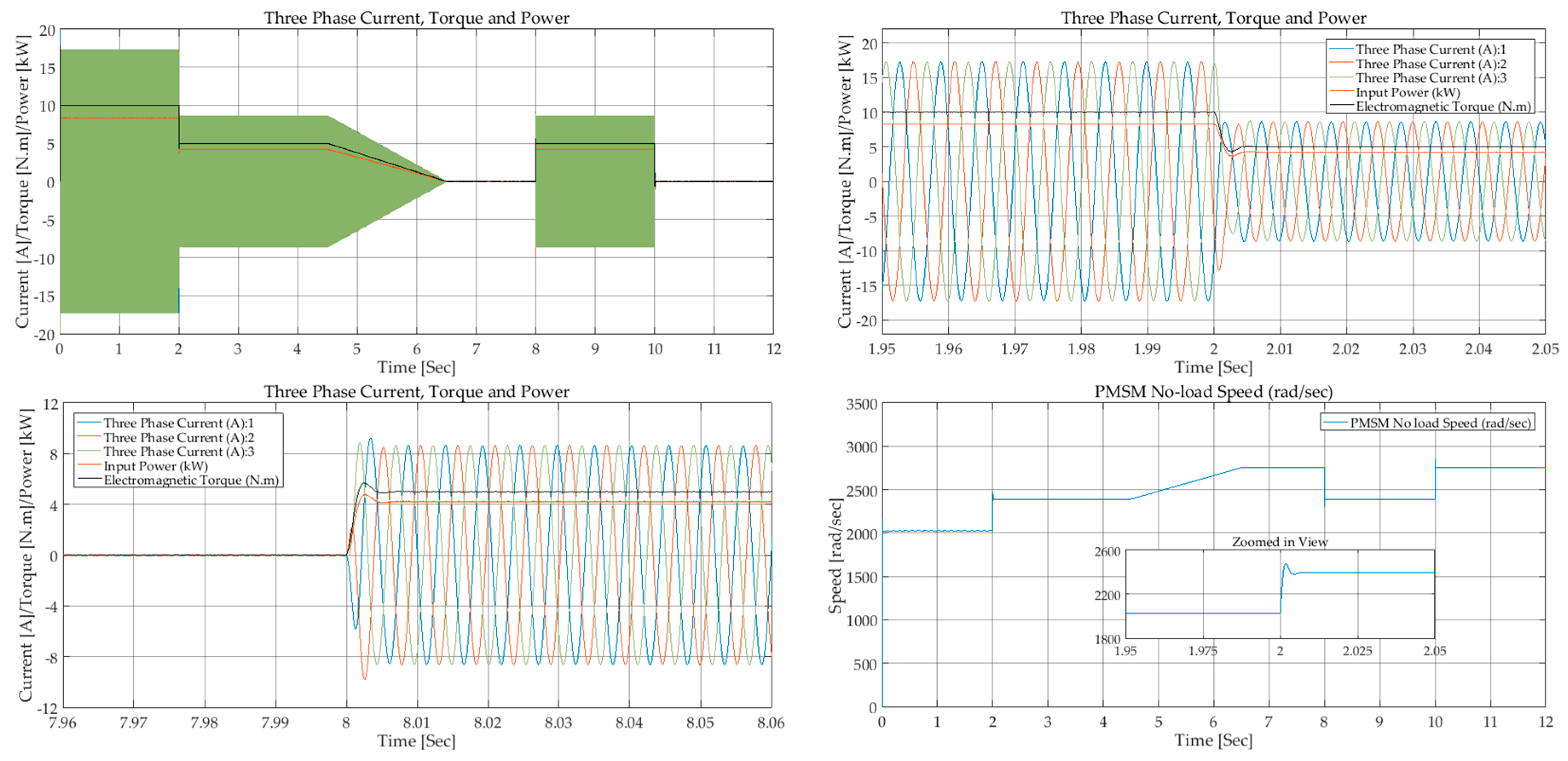
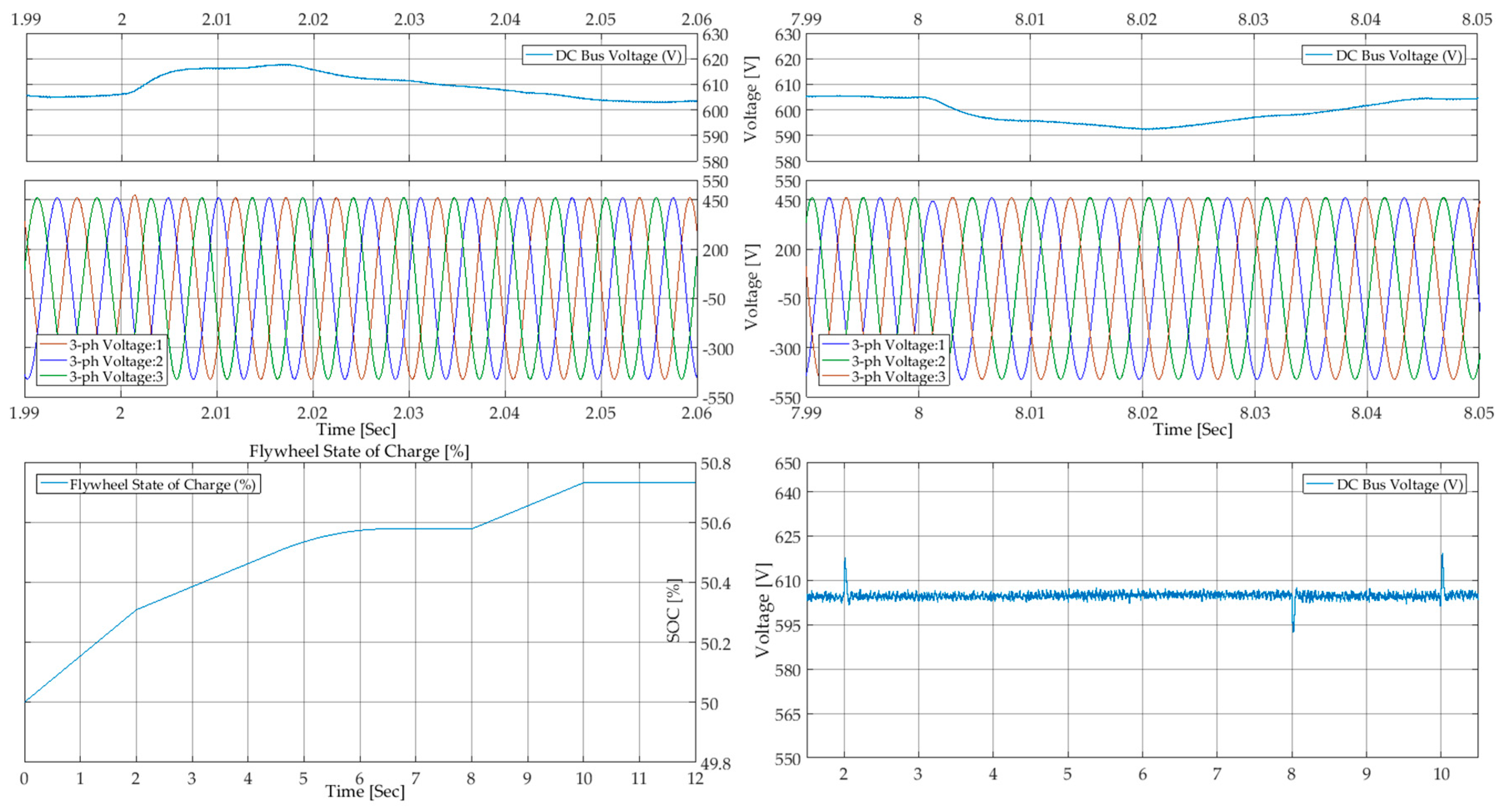
7.2.3. Charge–Discharge State
7.2.4. Discussion
8. Conclusions
Author Contributions
Conflicts of Interest
References
- Medina, P.; Bizuayehu, A.W.; Catalao, J.P.S.; Rodrigues, E.M.G.; Contreras, J. Electrical Energy Storage Systems: Technologies’ State-of-the-Art, Techno-economic Benefits and Applications Analysis. In Proceedings of the 47th Hawaii International Conference on System Sciences, Waikoloa, HI, USA, 6–9 January 2014; pp. 2295–2304. [Google Scholar]
- Chen, H.; Cong, T.N.; Yang, W.; Tan, C.; Li, Y.; Ding, Y. Progress in electrical energy storage system: A critical review. Prog. Nat. Sci. 2009, 19, 291–312. [Google Scholar] [CrossRef]
- Hadjipaschalis, I.; Poullikkas, A.; Efthimiou, V. Overview of current and future energy storage technologies for electric power applications. Renew. Sustain. Energy Rev. 2009, 13, 1513–1522. [Google Scholar] [CrossRef]
- Del Granado, P.C.; Wallace, S.W.; Pang, Z. The value of electricity storage in domestic homes: A smart grid perspective. Energy Syst. 2014, 5, 211–232. [Google Scholar] [CrossRef]
- Fu, B.Q.; Hamidi, A.; Nasiri, A.; Bhavaraju, V.; Krstic, S.B. The Role of Energy Storage in a Microgrid Concept. IEEE Electrification Mag. 2013, 1, 21–29. [Google Scholar] [CrossRef]
- Vafakhah, B.; Masiala, M.; Salmon, J.; Knight, A. Emulation of flywheel energy storage systems with a PMDC machine. In Proceedings of the 18th IEEE International Conference on Electric Machines, Vilamoura, Portugal, 6–9 September 2008; pp. 1–6. [Google Scholar]
- Liu, H.; Jiang, J. Flywheel energy storage—An upswing technology for energy sustainability. Energy Build. 2007, 39, 599–604. [Google Scholar] [CrossRef]
- Hebner, R.; Beno, J.; Walls, A. Flywheel batteries come around again. IEEE Spectr. 2002, 39, 46–51. [Google Scholar] [CrossRef]
- Bolund, B.; Bernhoff, H.; Leijon, M. Flywheel energy and power storage systems. Renew. Sustain. Energy Rev. 2007, 11, 235–258. [Google Scholar] [CrossRef]
- Sebastián, R.; Alzola, R.P. Flywheel energy storage systems: Review and simulation for an isolated wind power system. Renew. Sustain. Energy Rev. 2012, 16, 6803–6813. [Google Scholar] [CrossRef]
- Emadi, A.; Nasiri, A.; Bekiarov, S.B. Uninterruptable Power Supplies and Active Filters; Illinois Institute of Technology: New York, NY, USA; CRC Press: Washington, DC, USA, 2005. [Google Scholar]
- U.S Department of Energy (DOE/EE), Flywheel Energy Storage. An Alternative to Batteries for Uninterruptible Power Sypply Systems; U.S Department of Energy (DOE), Energy Efficiency and Renewable Energy: Washington, DC, USA, 2003.
- Bender, D. Flywheels; Sandia Report, SAND2015-3976; Sandia National Laboratories: Livermore, CA, USA, 2015.
- Tesla Power Wall. Available online: https://www.tesla.com/en_GB/energy?redirect=no (accessed on 1 November 2017).
- Brakels, D. Tesla Quietly Release New Powerwall Warranty: But There’s One Big Problem…. Available online: https://www.solarquotes.com.au/blog/new-powerwall-warranty/ (accessed on 8 November 2017).
- Kailasan, A.; Dimond, T.; Allaire, P.; Sheffler, D. Design and Analysis of a Unique Energy Storage Flywheel System—An Integrated Flywheel, Motor/Generator, and Magnetic Bearing Configuration. J. Eng. Gas Turbines Power 2015, 137, 1–10. [Google Scholar] [CrossRef]
- Tang, C.; Yang, J.; Han, D.; Lei, H. Rotor dynamics research of the composite flywheel spin test system: Modeling and simulation. In Proceedings of the 2016 IEEE International Conference on Power and Renewable Energy (ICPRE), Shanghai, China, 21–23 October 2016; pp. 537–541. [Google Scholar]
- Zhang, K.; Dai, X.; Zhang, X. Dynamic Analysis and Control of a n Energy Storage Flywheel Rotor with Active Magnetic Bearings. In Proceedings of the 2010 International Conference on Digital Manufacturing and Automation (ICDMA), Changsha, China, 18–20 December 2010. [Google Scholar]
- Mao, C.; Zhu, C. Vibration control for active magnetic bearing rotor system of high-speed flywheel energy storage system in a wide range of speed. In Proceedings of the 2016 IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 17–20 October 2016. [Google Scholar]
- Zhang, C.; Tseng, K.J. A novel flywheel energy storage system with partially-self-bearing flywheel-rotor. IEEE Trans. Energy Convers. 2007, 22, 477–487. [Google Scholar] [CrossRef]
- Zhang, C.; Tseng, K.J. Design and control of a novel flywheel energy storage system assisted by hybrid mechanical-magnetic bearings. Mechatronics 2013, 23, 297–309. [Google Scholar] [CrossRef]
- Genta, G. Kinetic Energy Storage: Theory and Practice of Advanced Flywheel Systems; Butterworth Heinemann Ltd.: London, UK, 1985. [Google Scholar]
- Shelke, P.R.S.; Dighole, D.G. A Review paper on Dual Mass Flywheel system. Int. Res. J. Eng. Technol. 2016, 5, 326–331. [Google Scholar]
- Östergård, R. Flywheel Energy Storage—A Conceptual Study; Uppsala Universitet: Uppsala, Sweden, 2011. [Google Scholar]
- Technology, F. Flywheel technology past, present, and 21st century projections. In Proceedings of the 32nd Intersociety Energy Conversion Engineering Conference, Honolulu, HI, USA, 27 July–1 August 1917; pp. 2312–2315. [Google Scholar]
- Pena-Alzola, R.; Campos-Gaona, D.; Martin, O. Control of Flywheel Energy Storage Systems as Virtual Synchronous Machines for Microgrid. In Proceedings of the 2015 IEEE Control Model Power Electronic, Vancouver, BC, Canada, 12–15 July 2015; pp. 1–7. [Google Scholar]
- De Oliveira, J.G. Power Control Systems in a Flywheel Based All-Electric Driveline; Uppsala Universitet: Uppsala, Sweden, 2011. [Google Scholar]
- Parfomak, P.W. Energy Storage for Power Grids and Electric Transportation: A Technology Assessment; Congressional Research Services: Washington, DC, USA, 2012.
- Akhil, A.A.; Huff, G.; Currier, A.B.; Kaun, B.C.; Rastler, D.M.; Chen, S.B.; Cotter, A.L.; Bradshaw, D.T.; Gauntlett, W.D. DOE/EPRI 2013 Electricity Storage Handbook in Collaboration with NRECA; Department of Energy (DOE): Washington, DC, USA, 2013.
- Su, W.; Jin, T.; Wang, S. Modeling and Simulation of Short-term Energy Storage: Flywheel. In Proceedings of the 2010 International Conference on Advances in Energy Engineering Modeling (ICAEE), Beijing, China, 19–20 June 2010; pp. 9–12. [Google Scholar]
- Meng, Y.M.; Li, T.C.; Wang, L. Simulation of controlling methods to flywheel energy storage on charge section. In Proceedings of the Electric Utility Deregulation and Restructuring and Power Technologies, Nanjing, China, 6–9 April 2008; pp. 2598–2602. [Google Scholar]
- Guo, Z.; Mu, X.; Bai, Z.; Cao, B. Research on the control of flywheel battery. J. Appl. Sci. 2007, 7, 3312–3316. [Google Scholar]
- Zhang, X.; Yang, J. An improved discharge control strategy with load current and rotor speed compensation for high-speed flywheel energy storage system. In Proceedings of the 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 318–324. [Google Scholar]
- Samineni, S.; Johnson, B.K.; Hess, H.L.; Law, J.D. Modeling and Analysis of a Flywheel Energy Storage System with a Power Converter Interface. In Proceedings of the International Conference on Power Systems Transients, New Orleans, LA, USA, 28 September–2 October 2003; Volume 4, pp. 1–6. [Google Scholar]
- Pena-Alzola, R.; Sebastián, R.; Quesada, J.; Colmenar, A. Review of Flywheel based Energy Storage Systems. In Proceedings of the 2011 International Conference on Power Engineering, Energy and Electrical Drives, Malaga, Spain, 11–13 May 2011. [Google Scholar]
- Gyrotricity Durable Energy Storage. High Speed, High Power Flywheel made from Low Cost Laminated Steel. Available online: https://www.gyrotricity.com/ (accessed on 5 January 2018).
- Sanders, S.; Senesky, M.; He, M.; Chiao, E. Low-Cost Flywheel Energy Storage Demonstration; Energy Research and Development Division, Final Project Report; Amber Kinetics, Inc.: Union City, CA, USA, 2015. [Google Scholar]
- Amiryar, M.; Pullen, K. A Review of Flywheel Energy Storage System Technologies and Their Applications. Appl. Sci. 2017, 7, 286. [Google Scholar] [CrossRef]
- Awadallah, M.A.; Venkatesh, B. Energy Storage in Flywheels: An Overview Le stockage d’énergie dans les volants: Aperçu. Can. J. Electr. Comput. Eng. 2015, 38, 183–193. [Google Scholar] [CrossRef]
- Yu, Y.; Wang, Y.; Sun, F. The Latest Development of the Motor/Generator for the Flywheel Energy Storage System. In Proceedings of the 2011 International Conference on Mechatronic Science, Electric Engineering and Computer, Jilin, China, 19–22 August 2011; pp. 1228–1232. [Google Scholar]
- Mounika, K.; Babu, B.K. Sinusoidal and Space Vector Pulse Width Modulation for Inverter. Int. J. Eng. Trends Technol. 2013, 4, 1012–1017. [Google Scholar]
- Elserougi, A.; Abdel-khalik, A.; Massoud, A.; Ahmed, S. Flywheel Energy Storage System Based on Boost DC-AC Converter. J. Power Energy Eng. 2012, 6, 1725–1732. [Google Scholar]
- Kim, H.; Sul, S. A Novel Filter Design for Output LC Filters of PWM Inverters. J. Power Electron. 2011, 11, 74–81. [Google Scholar] [CrossRef]
- Santiago, W. Inverter Output Filter Effect on PWM Motor Drives of a Flywheel Energy Storage System; Glenn Research Center: Cleveland, OH, USA, 2004.
- Daoud, M.I.; Abdel-Khalik, A.S.; Massoud, A.; Ahmed, S.; Abbasy, N.H. On The Development of Flywheel Storage Systems for Power System Applications: A Survey. In Proceedings of the 2012 20th International Conference on Electrical Machines (ICEM), Marseille, France, 2–5 September 2012; pp. 2119–2125. [Google Scholar]
- Subkhan, M.; Komori, M. New Concept for Flywheel Energy Storage System Using SMB and PMB. Appl. Supercond. IEEE Trans. 2011, 21, 1485–1488. [Google Scholar] [CrossRef]
- Faias, S.; Santos, P.; Sousa, J.; Castro, R. An Overview on Short and Long-Term Response Energy Storage Devices for Power Systems Applications; Technical University of Lisbon, IST/TUL: Lisboa, Portugal, 1950. [Google Scholar]
- Okou, R.; Sebitosi, A.B.; Khan, A.; Pillay, P. The potential impact of small-scale flywheel energy storage technology on Uganda’s energy sector. J. Energy S. Afr. 2009, 20, 14–19. [Google Scholar]
- Beacon Power LCC, Beacon POWER’s Operating Plant in Stephentown, New York. Available online: http://beaconpower.com/stephentown-new-york/ (accessed on 10 February 2017).
- Whittingham, M.S. History, Evolution, and Future Status of Energy Storage. Proc. IEEE 2012, 100, 1518–1534. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, L.; Chen, Z.; Su, W. Research on flywheel energy storage system for power quality. In Proceedings of the International Conference on Power System Technology, Kunming, China, 3–17 October 2002; Volume 1, pp. 496–499. [Google Scholar]
- Hawkins, D. Flywheels Keep the Grid in Tune. IEEE Spectr. 2011, 48, 16–18. [Google Scholar]
- Lazarewicz, M.L.; Rojas, A. Grid Frequency Regulation by Recycling Electrical Energy in Flywheels. In Proceedings of the 2004 IEEE Power Engineering Society General Meeting, Denver, CO, USA, 6–10 June 2004; Volume 2, pp. 2038–2042. [Google Scholar]
- Boicea, V.A. Energy Storage Technologies: The Past and the Present. Proc. IEEE 2014, 102, 1777–1794. [Google Scholar] [CrossRef]
- Zhou, L.; Qi, Z. Modeling and Simulation of Flywheel Energy Storage System with IPMSM for Voltage Sags in Distributed Power Network. In Proceedings of the 2009 IEEE International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 5046–5051. [Google Scholar]
- Williams Hybrid Power—Advanced Flywheel Energy Storage. Available online: http://www.esa-tec.eu/space-technologies/for-space/williams-hybrid-power-advanced-flywheel-energy-storage/ (accessed on 11 February 2017).
- Gurumurthy, S.R.; Sharma, A.; Sarkar, S.; Agarwal, V. Apportioning and mitigation of losses in a Flywheel Energy Storage system. In Proceedings of the 2013 4th IEEE International Symposium on Power Electronics for Distributed Generation Systems, Rogers, AR, USA, 8–11 July 2013. [Google Scholar]
- Li, X.; Erd, N.; Binder, A. Evaluation of Flywheel Energy Storage Systems for Residential Photovoltaic Installations. In Proceedings of the 2016 IEEE International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Anacapri, Italy, 22–24 June 2016; pp. 255–260. [Google Scholar]
- Garcia, M.; Gerlich, M.; Rautiainen, T. Overview of Storage Technologies; No. 645963; European Union: Brussels, Belgium, 2016. [Google Scholar]
- Pyrhonen, J.; Jokinen, T.; Hrabovcova, V. Design of Rotating Electrical Machines; John Wiley & Sons, Ltd.: New Delhi, India, 2008. [Google Scholar]
- Santiago, J.; Oliveira, J.G.; Lundin, J.; Larsson, A.; Bernhoff, H. Losses in axial-flux permanent-magnet coreless flywheel energy storage systems. In Proceedings of the 2008 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008; pp. 1–5. [Google Scholar]
- Wardle, F. Ultra-Precision Bearings; Woodhead Publishing: Cambridge, UK, 2015. [Google Scholar]
- NSK’s Plant in Newark (NSK). Super Precision Bearings; NSK: Newark, UK, 2009; p. 240. [Google Scholar]
- Muyeen, S.M. (Ed.) Wind Energy Conversion Systems, Green Energy and Technology; Springer: London, UK, 2012. [Google Scholar]
- Lee, J.; Nam, K.; Choi, S.; Kwon, S. Loss-minimizing control of PMSM with the use of polynomial approximations. IEEE Trans. Power Electron. 2009, 24, 1071–1082. [Google Scholar]
- Venna, S.G.; Vattikonda, S.; Mandarapu, S. Mathematical modeling and simulation of permanent magnet synchronous motor. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2013, 2, 3720–3726. [Google Scholar]
- Zhao, K. The study of improved PI method for PMSM vector control system based on SVPWM. In Proceedings of the 2011 IEEE Industry Applications Society Annual Meeting, Orlando, FL, USA, 9–13 October 2011; pp. 1–4. [Google Scholar]
- Zhang, Z.; Shu, J. MATLAB-based permanent magnet synchronous motor vector control simulation. In Proceedings of the 2010 3rd International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010; pp. 539–542. [Google Scholar]
- Liu, T.; Tan, Y.; Wu, G.; Wang, S. Simulation of PMSM Vector Control System Based on Matlab/Simulink. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, ICMTMA, Zhangjiajie, China, 11–12 April 2009; Volume 2, pp. 343–346. [Google Scholar]
- Soliman, H.M.; L-Hakim, S.M.E. Simple Model and PI Controller to Improve the Performance Characteristics of PMSM under Field Oriented Control with Using SVPWM. Int. J. Adv. Eng. Nano Technol. 2015, 2, 5–13. [Google Scholar]
- Munoz, D.V. Design, Simulation and Implementation of a PMSM Drive System; Chalmers University of Technology: Göteborg, Sweden, 2011. [Google Scholar]
- Ned, M. Electric Machines and Drives: A First Course; Wiley & Sons Inc.: Minneapolis, MN, USA, 2012. [Google Scholar]
- Chen, W. Generalized DQ Model of the Permanent Magnet Synchronous Motor Based on Extended Parl Transformation. In Proceedings of the 2013 1st International Future Energy Electronics Conference, Tainan, Taiwan, 3–6 November 2013; pp. 885–890. [Google Scholar]
- Wang, L. PID Control System Design for Electrical Drives and Power. In PID and Predictive Control of Electrical Drives and Power Converters Using Matlab®/Simulink; Wiely: Hoboken, NJ, USA, 2015; pp. 41–85. [Google Scholar]
- Mohan, N. First course on Power Electronics and Drives. In Power Electronics and Drives, 2003 ed.; MNPERE: Minneapolis, MN, USA, 2003. [Google Scholar]
- Liu, K.; Zhu, Z.Q. Parameter Estimation of PMSM for Aiding PI Regulator Design of Field Oriented Control. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 2705–2711. [Google Scholar]
- Mohan, N. Advanced Electric Drives. Analysis, Control, and Modeling Using MATLAB/Simulink; Wiley: Hoboken, NJ, USA, 2014. [Google Scholar]
- Boby, K.; Kottalil, P.A.M.; Ananthamoorthy, N.P. Mathematical Modelling of PMSM Vector Control System Based on SVPWM with PI Controller Using MATLAB. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2013, 2, 689–695. [Google Scholar]
- Deo, H.V.; Shekokar, P.R.U. A Review of Speed Control Techniques Using PMSM. Int. J. Innov. Res. Technol. 2014, 1, 247–253. [Google Scholar]
- Suresh, L.; Mahesh, K.; Janardhna, M.; Mahesh, M. Simulation of Space Vector Pulse Width Modulation for Voltage Source Inverter using Matlab/Simulink. J. Autom. Syst. Eng. 2014, 8, 133–140. [Google Scholar]
- Jose, L.A.; Karthikeyan, K.B. A Comparative Study of Sinusoidal PWM and Space Vector PWM of a Vector Controlled BLDC Motor. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2013, 2, 2662–2668. [Google Scholar]
- Burgos, R.P.; Kshirsagar, P.; Lidozzi, A.; Wang, F.; Boroyevich, D.; Frame, A.A.D. Mathematical Model and Control Design for Sensorless Vector Control of Permanent Magnet Synchronous Machines. In Proceedings of the 2006 IEEE COMPEL Workshop, Rensselaer Polytechnic Institute, Troy, NY, USA, 16–19 July 2006. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Carbon Fibre Vmax = 790 m/s a = 2/3 b 1 | Steel Laminate Vmax = 427 m/s a = 0 (No Hole) |
|---|---|---|
| Mass | 1 | 4.53 |
| Volume | 1 | 0.503 |
| Piller Power Bridge | Active Power | Temporal Power | Beacon Power Gen 4 | Rosseta T2 | Vycon | Kinetic Traction Systems | Stornetic | PowerThru | Gyrotricity | Amber Kintetics | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Origin | Germany | USA | Canada | USA | Germany | USA | USA | Germany | USA | UK | USA |
| Rated Power | 1600 | 250 kW | 100-500 kW | 100 kW | 500 kW | 500 kW | 200 kW | 22 kW | 190 kW | 100 kW | 8 kW |
| Rated Energy Capacity | 4 kWh | 0.9 kWh | 50 kWh | 25 kWh | 4 kWh | 0.83 kWh | 1.5 kWh | 4 kWh | 0.63 kWh | 5 kWh | 32 kWh |
| Application area | UPS | UPS | Voltage Stability/ Maintenance | Frequency Stability/ Maintenance | Recuperation | UPS, Recuperation | UPS, Power Quality, Micro-grid & Railway | Grid services, Railway | UPS | Frequency Stability, Railway | Micro-grid, Telecoms, Utilities |
| Maximum rpm | 3300 | 7700 | 11,500 | 16,000 | 25,000 | 36,000 | 37,800 | 45,000 | 52,000 | 20,000 | 10,000 |
| Bearing concept | Rolling bearings, relieved magnetically | Rolling bearings, relieved magnetically | Unclear | Rolling bearings, relieved magnetically | Rolling bearings | Active magnetic bearings | Magnetic & hydrodynamic bearings | Active magnetic bearings | Active magnetic bearings | Mechanical & magnetic bearings | Not stated |
| Electrical machine type | Not provided | Not provided | Permanent magnet | Permanent magnet | Not provided | Permanent magnet | Permanent magnet | Permanent magnet | Synchronous Reluctance | Permanent magnet | Permanent magnet |
| Flywheel material | Steel | Steel | Steel | Fibre composite | Fibre composite | Steel | Fibre composite | Fibre composite | Fibre composite | Laminated Steel | Steel |
| Topology |  |  |  |  |  |  |  |  |  |  |  |
| Configuration |  |  |  |  |  |  |  |  |  |  |  |
| Operating Conditions | Lower Limit of = / | |
|---|---|---|
| Ball Bearings | Roller Bearings | |
| Low-noise applications | 2.0 | 3.0 |
| Bearings subjected to vibration and shock loads | 1.5 | 2.0 |
| Standard operating conditions | 1.0 | 1.5 |
| Equivalent Load Factors | Load Torque Factors | Lubrication Factor, | |||||
|---|---|---|---|---|---|---|---|
| Bearing type | Xs | Ys | z | y | Oil Mist/Injection | Oil Bath/Grease | Oil Bath/Jet |
| Single row radial | 0.6 | 0.5 | 0.0007 | 0.55 | 1.0 | 3.0 | 6.0 |
| Angular contact, (α = 15–40°) | 0.5 | 0.26–0.47 | 0.001 | 0.33 | 0.33 | 0.47 | 0.47 |
| Angular contact double row | - | - | - | - | 2.0 | 6.0 | 9.0 |
| Stator winding resistance (Rs) | 0.20 Ω |
| Armature inductance (Ld = Lq) | 0.834 mH |
| Combined inertia (PMSM and flywheel) (J) | 12 kg m2 |
| Friction coefficient (Bm) | 0.8 × 10−4 N·m·s |
| Permanent magnet flux (λ) | 0.175 Wb |
| Number of poles | 2 |
| Power rating | 10 kW |
| Energy storage rating | 5 kWh |
| Maximum torque | 12 N·m |
| Maximum output power | 15 kW |
| Rated torque | 8 N·m |
| Maximum angular speed | 20,000 rpm |
| Minimum angular speed | 10,000 rpm |
| Machine rated over speed | 25,000 rpm |
| Switching frequency | 10 kHz |
| Filter damping resistance | 0.75 Ω |
| Filter capacitance | 4 × 10−5 F |
| Filter inductance | 640 × 10−6 H |
| DC-bus voltage | 600 V |
| Voltage constant () | |
| Air density () | 0.0011 kg/m3 |
| Air dynamic viscosity () | 1.91 × 10−5 kg/m·s |
| Flywheel rotor outer diameter ( | 0.4 m |
| Shaft diameter ( | 0.025 m |
| Torque coefficient () | 0.0554 |
| Bearing design factor () | 0.0007 |
| Kinematics oil viscosity () | 130 mm2/s (40 °C) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amiryar, M.E.; Pullen, K.R.; Nankoo, D. Development of a High-Fidelity Model for an Electrically Driven Energy Storage Flywheel Suitable for Small Scale Residential Applications. Appl. Sci. 2018, 8, 453. https://doi.org/10.3390/app8030453
Amiryar ME, Pullen KR, Nankoo D. Development of a High-Fidelity Model for an Electrically Driven Energy Storage Flywheel Suitable for Small Scale Residential Applications. Applied Sciences. 2018; 8(3):453. https://doi.org/10.3390/app8030453
Chicago/Turabian StyleAmiryar, Mustafa E., Keith R. Pullen, and Daniel Nankoo. 2018. "Development of a High-Fidelity Model for an Electrically Driven Energy Storage Flywheel Suitable for Small Scale Residential Applications" Applied Sciences 8, no. 3: 453. https://doi.org/10.3390/app8030453