MCDM-ECP: Multi Criteria Decision Making Method for Emergency Communication Protocol in Disaster Area Wireless Network


1
College of Information Science & Technology, Donghua University, Shanghai 201620, China
2
Engineering Research Center of Digitized Textile & Fashion Technology, Ministry of Education, Shanghai 201620, China
3
Shanghai Earthquake Agency, Shanghai 201203, China
*
Author to whom correspondence should be addressed.
Appl. Sci. 2018, 8(7), 1165; https://doi.org/10.3390/app8071165
Submission received: 22 June 2018
/
Revised: 9 July 2018
/
Accepted: 10 July 2018
/
Published: 18 July 2018
Abstract
:Disaster Area Wireless Networks (DAWNs) are widely deployed in natural or man-made disaster scenes, since the communication infrastructure may be completely destroyed by the disaster. This paper proposes a hybrid network architecture for DAWNs due to the mobility of first responders and refugees. Based on the link characterization of DAWNs, we choose four essential criteria and propose a multi-criteria decision-making method for emergency communication protocol (MCDM-ECP), which utilizes the analytic hierarchy process (AHP) method and Technique for Order Preference by Similarity to an Ideal Solution (TOPSIS) method to find the optimal next-hop node in DAWNs. Routing discovery and routing maintenance processes are included in the novel protocol. The simulation results show that MCDM-ECP performs better than other classical protocols both in energy consumption and packet received rate (PRR) for long-term emergency communications.
1. Introduction
In recent years, a tremendous number of studies based on observed evidences or data-based experiments have shown that the number, frequency, and severity of disaster events are sharply increasing around the world [1]. Natural disasters such as Hurricane Katrina in the United States (USA), the tsunami in Asia, or man-made attacks such as the 9/11 terrorist attack in New York in 2001 and the London bombings in 2005 have shown that the use of communications and network connectivity is of vital importance for saving lives [2]. Several other serious outcomes are observed after a disaster; these include social effects such as looting, economic pressures such as loss of tourism industry, etc. [3]. The Wenchuan earthquake of 2008 hit a wide area of Sichuan Province in China, and cost at least 69,227 deaths according to the government. Most social infrastructures, such as transportation, electric power, gas, water, and telecommunication services, suffered serious damages due to the tremor and succeeding disasters, which isolated the inhabitants of the disaster-affected areas from the rest of the world. For quite a long time, the outside could not get any information in the disaster areas. Another one of the large-area disasters undergoing a clear increase in its scales, magnitudes, and consequences are wildfires. In this context, the report presented at the annual meeting of the American Geophysical Union in San Francisco (USA) in late 2012 predicted that the burned area from wildfires in the USA would double in size by 2050 due to warmer and drier conditions in forthcoming decades [4]. This prediction was buttressed by the record of incidences in that same year, with massive fires affecting Colorado and New Mexico [5]. A conclusion of utmost importance for the scope of this work is that all of the above observations lead to the certainty that commanders and decision makers will encounter higher difficulties in the future when allocating resources against disasters due to their simultaneity, co-locality, and interconnection.
Decision-making in this context is usually driven by predetermined procedures and/or protocols based on the passive reaction triggered by relative disasters (e.g., traffic jam caused by an accident). The purpose of making decisions lies on the mitigations of costs and casualties, thus demanding the effective management of resources in disaster situations. For instance, Alp, et al. in [6] analyzed bidding mechanisms for optimally procuring goods in disaster relief logistics by using an integer programming formulation of the underlying auction operation. Liu and Yong in [7] derived a dynamic time-dependent nonlinear model to quantify the influence of a disaster on supply, demand, and humanitarian logistics, and applied genetic algorithms to infer the optimal logistic plan that would minimize the mismatches between the supplied goods and the demand, as well as the time delay of their delivery. Other references in disaster management include the allocation of critical emergency resources in multi-hazard situations [8,9,10], transport and provisioning under uncertainty [11], supply chain logistics [12], and waste management [13], among many others.
Based on what has been discussed above, we can conclude that resource allocation is of great important in disaster relief scenarios. This paper elaborates on a particular yet usual resource allocation problem in disaster management: the selection of next-hop node selection in Disaster Area Wireless Networks (DAWNs) [14]. After man-made or natural disasters such as earthquakes, fires, floods, etc., the communication infrastructure may be partly or completely destroyed. Meanwhile, first responders need to communicate and exchange data through networks in disaster areas in order to build the bridge between the front and back of the affected area. The damage of communication links impacts on the process of disaster relief, thus threating the lives and property of the affected refugees. Although there are some applications of disaster evacuation guidance that are available for smartphones, they assume the frequent use of web services. Due to this assumption, those applications become useless once the communication network is damaged. This unavailability of mobile communication services results in the delay of gaining and forwarding critical information for human lives and necessary goods demanded in the disaster areas. With the characteristics of easy deployment, easy access, and no wires, wireless is a promising solution for setting up temporary communication networks in emergency situations. For example, first responders commonly carry portable devices such as intelligent smart phones, PDAs, walkie-talkies, etc., for rescue tasks. Such portable devices, which are usually named as communication nodes, play important roles in data collecting and transmission relaying. In practice, the heterogeneity of communication nodes are especially acute in terms of their coverage and cost, ranging from traditional radio frequency (RF) front-ends installed on ground vehicles and portable masts to last-generation devices operating from unmanned aerial fleets of drones, helicopters, and airplanes [15]. Furthermore, communicational nodes are used in disaster-affected areas for first responders to establish DAWNs in real time to accomplish rescue tasks until the fixed communication infrastructure becomes available. Such networks, which are also called emergency communication networks (ECNs), consist of heterogeneous nodes that communicate in a mobile fashion using wireless links. One example of such ECNs is described by the perception of hastily formed networks [16,17] that are built-up using smart phones carried by emergency responders and Emergency Communication Vehicles (ECVs) working at the disaster sites to carry out post-disaster recovery operations. The characteristics of DAWNs are as follows: frequent link breakage, inconsistencies in data rates, incompatibility of resources, the temporary unavailability of needed resources and communications links. Researchers have been focusing on mobility models as well as routing algorithms in DAWNs for the improvement of network performance recently. However, common routing protocols are mainly designed for stable or harsh distributed networks, ignoring the mobility of nodes in DAWNs, especially for ECNs that combine several dynamic communicational nodes. In reality, DAWNs are different from traditional Mobile Ad-hoc Networks (MANETs), as they consist of stationary ECVs that appear as relay stations for emergency information; they are also different from Vehicular ad-hoc networks (VANETs), as nodes in DAWNs are asymmetric in energy supply and transmission coverage. Before deploying DAWNs, the following aspects should be considered. Firstly, DAWNs can be rapidly deployed as substitution for destroyed communication infrastructure. Secondly, both fixed nodes and mobile nodes are used in DAWNs in order to adapt to the disaster scenario. Also, such a combination satisfies the demands of effectiveness. Thirdly, unlike traditional wired and wireless networks, the topology of DAWNs changes frequently, as mobile nodes usually change their positions. Thus, a high transmission delay is needed in such frequently changed networks to avoid a low data transmission rate [16]. Such communication networks can be infrastructure-less with typical mobility patterns and delay tolerance, so it is difficult for decision makers to choose optimal solutions to find next-hop nodes. Motivated by solving the problem of selecting the next-hop node in DAWNs, we mainly make the following contributions in this paper:
- Characteristics of three types of disasters—earthquake, fire and typhoon—are analyzed. Four criteria for decision making are settled not only from the perspective of the decision-making environment, but also from the perspective of decision objective.
- We present a method for next hop selection in DAWNs. Since the network infrastructures in disasters are corrupted, the estimation of DAWNs includes four aspects, e.g., energy consumed (EC), number of connected nodes (CN), hop counts to ECVs (HC), and distance to the nearest ECVs (DIS). We consider these four aspects as decision criteria that cover all of the decision-making aspects in disasters for next-hop selection. We use the analytic hierarchy process–Technique for Order Preference by Similarity to an Ideal Solution (AHP-TOPSIS) method to calculate the weights and the judgment matrix for the selected criteria.
- We propose a multi-criteria decision-making method for emergency communication protocol (MCDM-ECP) algorithm, which can update routing tables and choose the optimal routing path according to the real-time routing information in DAWNs. The algorithm can not only reduce energy consumption for mobile nodes, but also extend the network lifetime for DAWNs, which is of great importance for disaster relief. Two classical algorithms: Ad hoc On-demand Distance Vector (AODV), and Low Energy Adaptive Clustering Hierarchy (LEACH), are compared with MCDM-ECP, and the performance evaluation results show that the proposed algorithm performs better than other classical protocols both in energy consumption and packet received rate (PRR) for long-term emergency communications.
The rest of this paper is organized as follows. In Section 2, related works about decision making and routing protocols on DAWNs are presented. In Section 3, we design a network structure and topology in an emergency communication scenario and analyze link characterization; then, we propose the MCDM-ECP algorithm for our designed DAWNs in Section 4, followed by simulations and results analysis in Section 5. Finally, Section 6 concludes this paper.
2. Related Works
In several reports from emergency management agencies, the first 72-h aftermath the occurrence of a disaster is considered the most critical to organize first response actions and save human lives [18]. In such catastrophic situations, an efficient deployment of mobile wireless communication nodes is an extremely challenging real problem to be tackled, since predeployed network infrastructures may be totally or partly destroyed. A dramatic evidence of this was provided by the Japan earthquake in 2011: over 14,000 cellular base stations were damaged, and one million fixed network lines were out of service [19,20]. The growing use of mobile devices during the last decade has enabled a better and quicker crisis response against disaster events [21]. Unfortunately, most of these mobile nodes in the composed networks rely on capabilities of wireless equipment, e.g., self-configuration and self-organization; they do not assume the presence of other communication infrastructures within the disaster scenario. In this context, it requires interoperability among highly heterogeneous portable equipment in terms of coverage, cost, autonomy, and other similar factors, to form a temporary DAWN, which requires reliability, interoperability, and adaptiveness [20,22]. Required mobile nodes can range from traditional RF front-ends installed on ground vehicles and portable masts to last-generation devices operating from unmanned aerial fleets of drones, helicopters, and airplanes. However, the diversity in the set of deployable nodes has produced a lot of research that is directly related to disaster/emergency response communications deployment, especially to the next-hop selection [23]. Mobile nodes deployment represents a very active research niche in DAWNs, as pointed out in [24,25,26,27,28] by Amaldi, Younis, Benyamina, et al., and more recently in [29] by Khoufi, Ines, et al. Furthermore, in this context, routing protocols have been extensively investigated for rescue operations in post-disaster scenarios, and several adaptive routing protocols have been proposed. For DAWNs, AODV [30] and LEACH [31] are two classical and popular routing protocols that mainly find a route through flooding and reply messages.
As discussed above, many considerations, such as mobile nodes deployment, routing protocols, network bandwidth, etc., need to be associated with resource allocations in DAWNs. In this paper, in order to proceed with the literature review regarding solutions for the optimum resource allocation problem in DAWN, we will focus our study on next-hop node selection protocols under the assumption that mobile node power is constrained for disaster situations.
Routing in DAWNs is crucial because of the absence of a central routing. Each intermediate node is part of the path between a source and a destination, and thus is like a router. In [32], Ray, et al. designed a framework for disaster management which considered both the reliability and energy efficiency. The authors used the hop-count metric for message transmission, and the message have to reach the destination as quickly as possible due to a high emergency level with fewer hops. A location-based routing protocol for DAWN was presented in [33] by Ko, et al. The route was searched based on the request zone during the route discovery. Martín-Campillo, et al. in [34] proposed the forwarding methods of opportunistic networks in disaster areas. The authors compared four different opportunistic routing protocols for emergency scenarios such as Epidemic, MaxProp, Probabilistic Routing Protocol using History of Encounters and Transitivity (PRoPHET), and Time To Return (TTR), but these forwarding methods do not consider the energy for long emergency situations with a high density of nodes or many messages. The hybrid protocol Chameleon (CML), which uses two protocols—AODV and Optimized Link State Routing (OLSR)—was presented in [35,36,37] by Ramrekha, et al. It aims to adapt to the change in the topology according to the behavior of nodes in a disaster. Ramrekha, et al. in [38] presented the performance of AODV and OLSR in an emergency situation inside a building, and showed that OLSR proactive behavior is better than AODV reactive behavior for networks with low density. However, the performance of AODV is much better regarding delay and jitter in dense networks. The LEACH is a well-known routing protocol for cluster-based wireless sensor networks. Li, Yun, et al. in [39] analyzed the performance of LEACH-based wireless sensor networks in terms of lifetime and throughput. They deduced the functions of lifetime and throughput related to the time length of each simulation round. These functions enhanced the performance of cluster-based wireless sensor networks in terms of lifetime and throughput. However, LEACH is not appropriate for supporting mobile sensor nodes, taking into consideration the mixed sensory fields with fixed and mobile nodes in a sensor field, especially in emergency communication scenarios. In this paper, we mainly focus on protocol designing for emergency scenarios that will reduce energy consumption and enhance PRR. We also make comparisons between our proposed MCDM-ECP and two other classical and popular routing protocols, AODV and LEACH, in order to evaluate the performance of each protocol.
3. Network Structure and Link Characterization
3.1. Disaster Area Wireless Networks
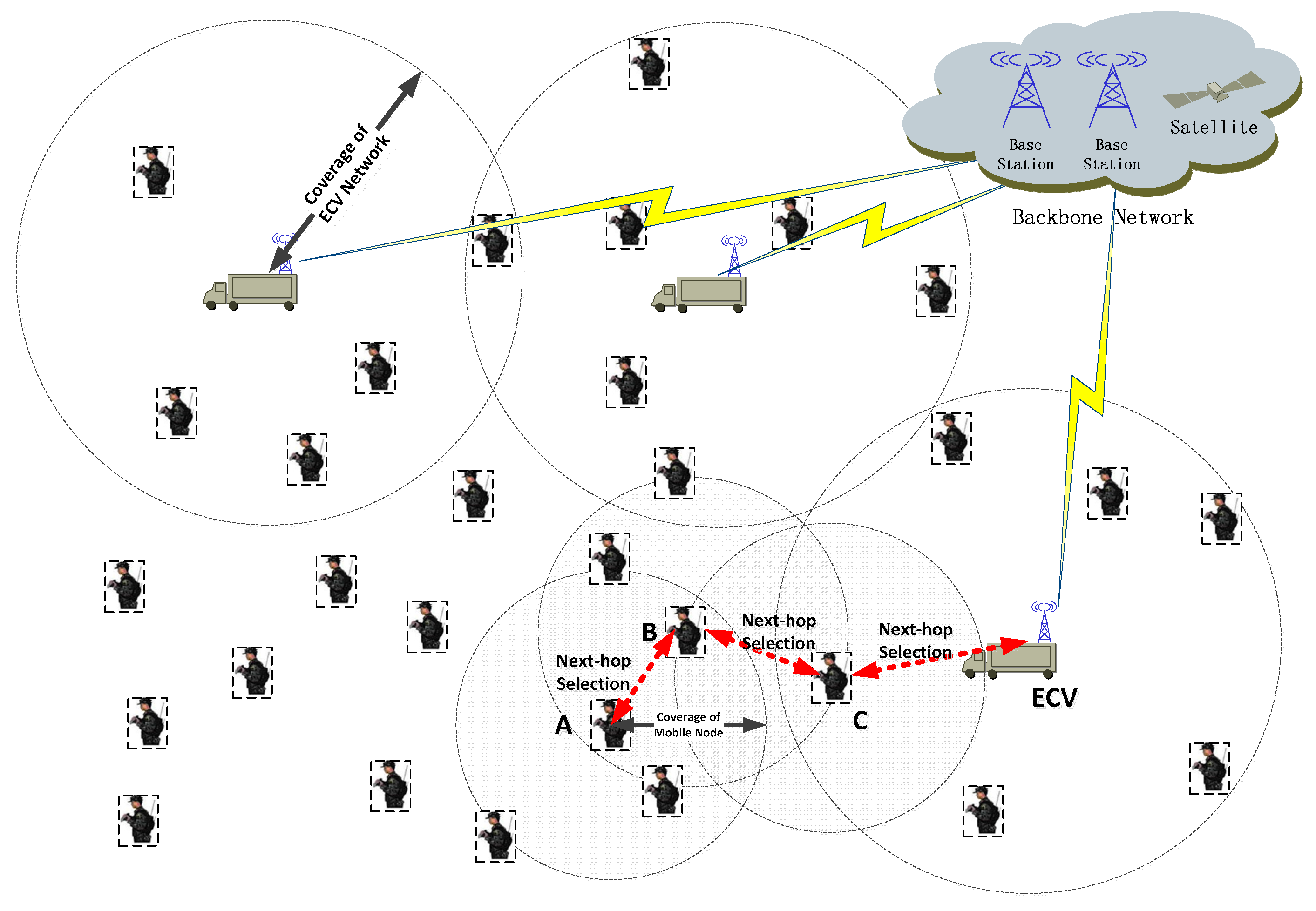
In the aftermath of a natural or man-made disaster (such as a hurricane or a strong earthquake), regular communication services are disrupted due to infrastructure damage and power outages. Communication remains essential for conducting a well-managed recovery operation, finding survivors, or contacting friends and loved ones. In the absence of power, such communication must rely on battery-operated wireless devices such as cell phones and wireless routers powered by vehicular batteries. We term such communication networks as DAWNs. Figure 1 gives the network structure of a DAWN, which we proposed in this paper. In this scenario, rescuers (civil protection forces such as troops, fire brigades, rescue teams, etc.) carry portable devices that can communicate with each other as well as with ECVs by single or multiple hops. ECVs are located at the edge of disaster area, since roads are often completely destroyed by earthquakes, floods, etc. ECVs can gather information collected from disaster area by the mobile nodes carried by rescuers, and then transfer this information to the Command Center through a backbone network that may consist of satellites, base stations (BS), etc. Rescuers carry out their tasks all over the disaster area with communication devices to send or receive messages. They move frequently with the decreasing catastrophic intensity of any particular disaster area, thus causing the frequent link breakage and topology change. Restricted in power supply, mobile nodes have limited radio coverage. When there is no ECV nearby, mobile nodes have to turn to neighbor mobile nodes for data transmission. Unlike mobile nodes, ECVs are able to communicate with a backbone network without distance constraints because of their sufficient power supply and large radio coverage. Through one hop or multiple hops to ECVs, collected data can then be delivered to the Command Center by backbone networks, thus helping governors make suitable decisions for rescuing refugees trapped in the disaster area.
In order to elaborate the network structure more clearly, we discuss a real multi-hop communication instance. A, B, and C are three mobile nodes involved in DAWN. Node A needs to transfer some rescue information to the Command Center while there are no ECVs in its communication coverage, so it has to transfer the information to next-hop, according to the routing table, as shown in Table 1. Node A selects neighbor Node B as the next-hop node for data transmission, then Node B selects Node C, and finally Node C transfers the data to the ECV directly.
3.2. Link Characterization
It is difficult to gather and utilize the real-time information in emergency situations without DAWNs. In this context, a predeployed network infrastructure may be completely destroyed. People both in and out of disaster areas need a rapidly deployable replacement network to communicate with each other. Intermittent connectivity, abrupt changes in network topology, and a low reception rate are the most important properties that distinguish DAWN from other types of self-organized networks. In order to meet the requirements of DAWN’s frequently changing topology, appropriate routing protocols should be considered. They become more significant in the emergency-affected network due to the time-critical nature of the service and information requirements.
The nodes in DAWNs are limited in radio coverage and communicational ability because of limitations of power supply, thus influencing the lifetime of the whole DAWNs. It is essential to calculate the residual energy of each node in DAWNs so as to balance the energy consumption. When one node is sending or receiving messages, it may be connected to its neighbors as an intermediate forwarding node. The more nodes that are connected, the higher possibility of congestion in the link. In order to improve the performance of DAWNs, we should choose a next-hop node that is connected by less neighbors. A low hop count means low latency from source to destination, so we usually choose next-hop node with the lowest hop counts to deliver data. Each node in a DAWN is equipped with Global Position System (GPS) for localization, so the distance between nodes can be calculated. Generally speaking, a node near a destination is chosen as next-hop, since it may connect to the destination through the lowest hop counts.
We take three different kinds of disasters—earthquake, fire, and typhoon—as examples to elaborate the universality of the four selected criteria: energy consumed (EC), number of connected nodes (CN), hop counts to ECVs (HC), and distance to the nearest ECVs (DIS). We assume that predeployed network infrastructures are totally destroyed during the three disasters, so rapidly deployed DAWNs are helping affected people communicate with each other.
EC determines the lifetime of DAWNs, regardless of hazard types. The more energy consumed, the shorter DAWNs last. In strong earthquakes, the victims may be buried in the ruins, waiting for rescue. It takes hours or more to complete the rescue mission before predeployed network communication recovery, so low-energy consumption nodes are essential for first responders. However, situations are contrary in a fire disaster. Firemen need to implement rapid rescue before trapped people get burned, so the lifetime of DAWNs may be not as essential as other criteria.
As for CN, the more nodes that are connected, the higher possibility of congestion in the link. In order to improve the performance of DAWNs, we should choose the next-hop node, which is connected by less neighbors, regardless of hazard type.
A low hop count means low latency from source to destination, so we usually choose the next-hop node with the lowest hop counts to deliver data, no matter the kind of disaster.
As for DIS, each node in DAWNs is equipped with GPS for localization, so the distance between nodes can be calculated. Generally speaking, a node that is near the destination is chosen as next-hop, since it may connect to the destination through the lowest hop counts. In earthquakes or typhoons, ECVs cannot enter the epicenter because roads are blocked, so they cannot provide communication service out of their coverage. In this situation, DIS is an important criterion in DAWNs. However, ECVs can reach the edge of a fire center to cover the affected area, so DIS is negligible in such a scenario.
From what we discussed above, we can finally select four decision criteria in DAWNs: energy consumed (EC), number of connected nodes (CN), hop counts to ECVs (HC), and distance to the nearest ECVs (DIS).
4. Multi-Criteria Decision-Making Method for Emergency Communication Protocol (MCDM-ECP)
In this section, a proposal of MCDM-ECP for hybrid DAWNs is presented for the selection of the next-hop node. This algorithm is formed by two algorithms: AHP, which evaluates the decision criteria for the selection of the objective node, and the TOPSIS algorithm, which evaluates opportunities for all of the neighbor nodes selected as the next-hop node, and organizes them from the most adequate to the least.
4.1. Criteria Weights
As aforementioned in Section 3, next-hop node selection depends on the following decision criteria selected: EC, CN, HC, and DIS. We use the AHP method to determine the weights of the four decision criteria in this section, and then perform a ranking of next-hop node opportunities through TOPSIS in the next section.
The AHP algorithm [40] was developed with four steps: (1) problem definition, (2) construction of the hierarchy, (3) construction of the judgment matrix, and (4) calculation of the normalized weights.
Our problem is defined, divided, and classified as follows: the objective, the criteria, and the selection. The objective is to select the most probable target nodes from routing tables for data dissemination. The criteria are the factors affecting the preference of the selection. We analyze the variables that can affect the process of data dissemination in DAWN, and then choose four variables of interest for the proposed MCDM-ECP due to their relevance. The four variables (EC, CN, HC, and DIS) are enough to assess the route conditions. The judgment matrix for the AHP method is given by:
where stands for the importance degree of characteristic i to j. We normalize each column of P by:
Then, we summarize the normalized matrix by line, and get vector :
Again, we normalize by:
Finally, we get the weights W:
where stands for the importance ratio of each criterion that we choose.
4.2. Weighed Multi-Criteria Matrix
After the calculation of weights, we continue to process the TOPSIS algorithm [41] for selecting the next-hop node. With respect to the selection, the AHP-TOPSIS algorithm dynamically evaluates the mobility characteristics of the nodes involved in the DAWN.
Firstly, we build the multi-criteria matrix by the four decision criteria aforementioned:
where indicates energy consumed, indicates the numbers of connected nodes, indicates hop counts to ECVs, and indicates distance to the nearest ECVs. Subscript n denotes the number of neighbors.
Secondly, we normalize matrix A by:
where stands for each element of normalized matrix , which is illustrated by:
Thirdly, we multiply each column in by the weights W that we get from Equation (4), and get the weighted multi-criteria matrix M:
4.3. Next-Hop Node Selection
For simplicity of illustration, we mark the weighted multi-criteria matrix M as follows:
where is a supplement of the elements in the weighted multi-criteria matrix M that we get in Section 4.2. In this section, we use cost–benefit theory [42] to calculate the next-hop node. All four decision criteria (EC, CN, HC, DIS) that we choose in Section 3 are cost types, so ideal and bad solutions of the weighted multi-criteria matrix M are respectively described as:
where and stands for ideal and bad solutions of the weighted multi-criteria matrix M respectively; calculates the minimum element in column j, and calculates the maximum element in column j. For each solution, the Euclidean distance D [43] is calculated as:
The preference index (PI) of the highest solution to the lowest solution that we discussed in this paper is defined as:
PI determines how ideal solutions outperform bad solutions, so we select the node with the highest PI value as the optimal next-hop node for data transmission.
4.4. MCDM-ECP for Hybrid DAWNs
Two processes are involved in MCDM-ECP: the initialization process, and the data transmission process. The flowcharts of the two processes are shown in Figure 2 and Figure 3, respectively.
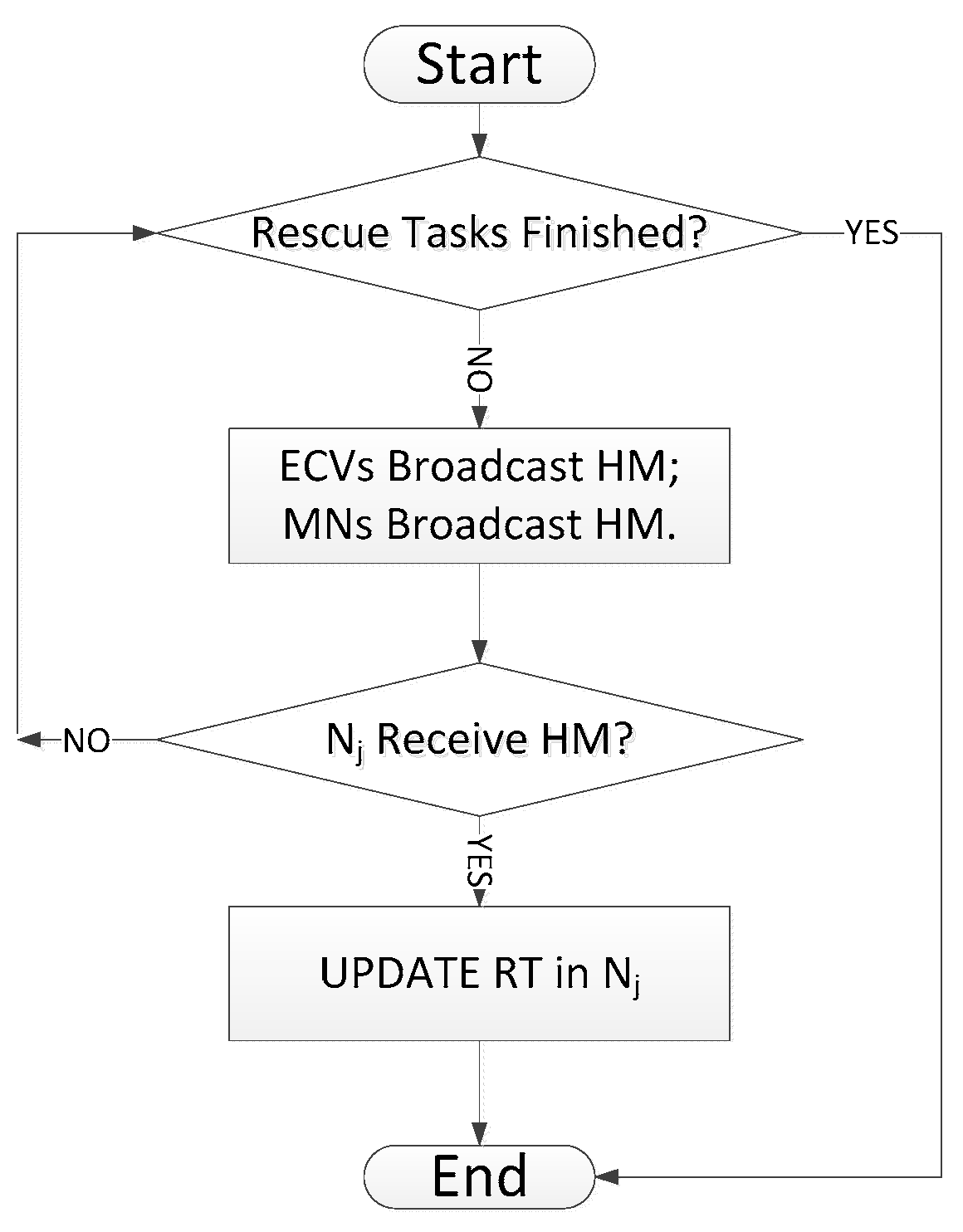
Figure 2 describes the initialization procedure of MCDM-ECP. Routing discovery and routing maintenance are included in this process. In the rescue tasks, ECVs and Mobile Nodes (MNs) broadcast their own Hello Messages (HM) frequently for routing discovery. The data format of the HM message is illustrated in Table 2.
The “Type” field is a special tag for HM. Followed with the “Type” field, there are four decision criteria in DAWNs that determine the crucial factors for decision making. The “IP0” field shows the IP address of this mobile node. The following fields are neighbors’ IP information, which are illustrated as IPx (x = ). First responders move from one affected area to another to perform rescue tasks, so neighbors are frequently changed during their movements. The time period of broadcasting a Hello message can be calculated by basic distance (e.g., distance of first responder from one affected area to another) to speed (e.g., speed of first responder when he or she is moving from one affected area to another) ratio i.e., (time = distance/speed) [44]. We use the red front to highlight them in the revised version.
Nodes update their routing tables (RT) as soon as they receive HMs from other nodes. The routing table includes content of source identification (ID), destination ID, the number of nodes connected, hop counts, node positions, next-hop node, etc.
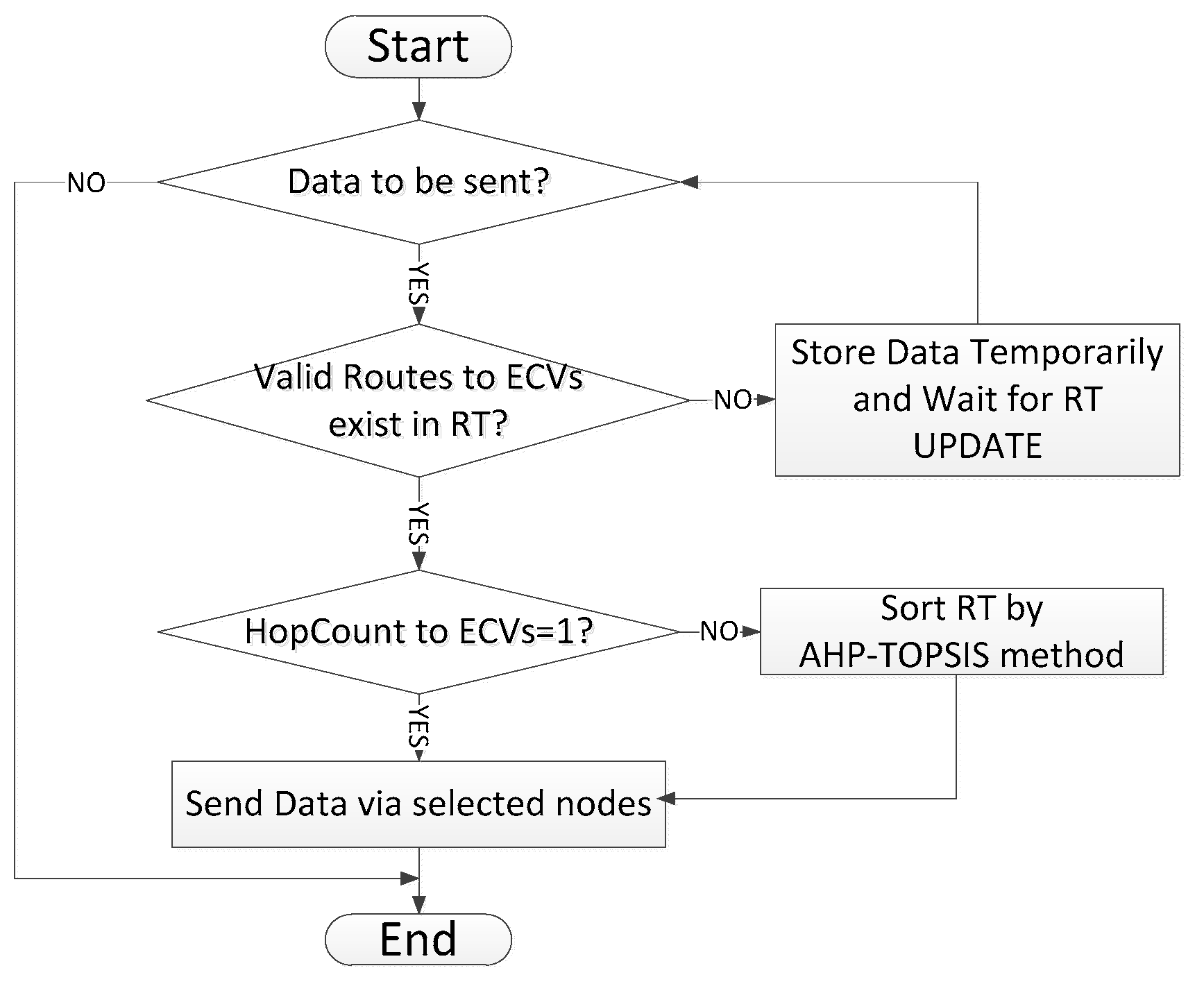
Figure 3 illustrates the data transmission procedure of a MCDM-ECP. In DAWNs, dynamic nodes may lose connection with their neighbors frequently, so nodes first check if there is a valid route to ECVs in the routing table (RT) before data transmission. Data will be stored temporarily until a valid route to the ECVs exists in the routing table. One hop to ECVs means that data can be directly transferred to ECVs; otherwise, the next-hop node should be chosen through the AHP-TOPSIS method. The MCDM-ECP algorithm is shown in Algorithm 1.
| Algorithm 1. MCDM-ECP | |
| 1 | Notations: |
| 2 | Nj = Set of Neighbors; |
| 3 | RT = Routing Table; |
| 4 | HM = Hello Message; |
| 5 | BEGIN |
| 6 | /*Initialization Procedure*/ |
| 7 | Procedure Begin |
| 8 | WHILE Processing Rescue Tasks |
| 9 | ECVs broadcast HM; |
| 10 | MNs broadcast HM; |
| 11 | IF Nj Receive HM from ECVs or MNs THEN |
| 12 | UPDATE RT in Nj; |
| 13 | END IF |
| 14 | END WHILE |
| 15 | Procedure End |
| 16 | /*Data transmission Procedure*/ |
| 17 | Procedure Begin |
| 18 | WHILE Processing Rescue Tasks |
| 19 | IF a valid route to ECVs exist THEN |
| 20 | IF HopCount to ECVs==1 THEN |
| 21 | Send data to ECVs directly; |
| 22 | ELSE Sort RT by AHP-TOPSIS method; |
| 23 | Select top node in RT; |
| 24 | Send data via selected node; |
| 25 | END IF |
| 26 | ELSE Store data temporarily and wait for RT UPDATE |
| 27 | END IF |
| 28 | END WHILE |
| 29 | Procedure End |
| 30 | END |
5. Simulations and Results Analysis
In this section, we make simulations for our proposed MCDM-ECP algorithm to evaluate the performance. To begin with, the weights matrix W should be settled (see Equations (1)–(5)). In practice, the weights of criteria are different according to the types of disasters. For example, it is essential for performances regarding the lifetime of ECNs in a devastating earthquake, since lots of trapped people need to be rescued as soon as possible without communications, while in a terrorist attack, the latency of ECNs is of great important for the government manipulating situations. There is clearly no influence for the selected weights matrix W to the final results, so we choose an earthquake scenario to settle the weights matrix W with:
From Equations (1)–(4), we can calculate the weights:
In order to make all of the columns of our proposed multi-criteria matrix comparable, we transform our proposed multi-criteria matrix by:
So, the linear-transformed matrix
According to Equations (5)–(12), we finally get the preference index of the highest solution to the lowest solution. Table 3 lists the simulations parameters of our research.
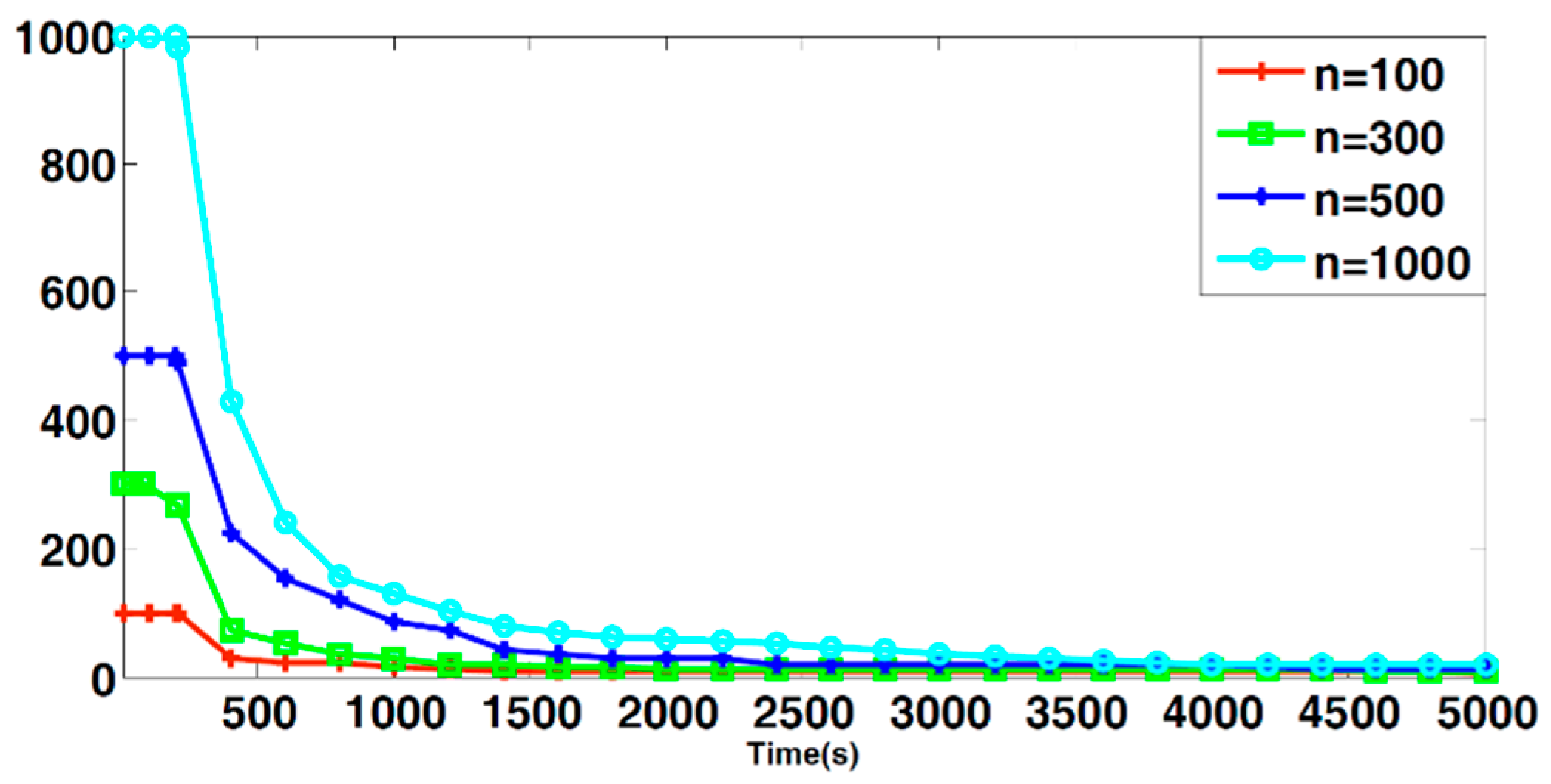
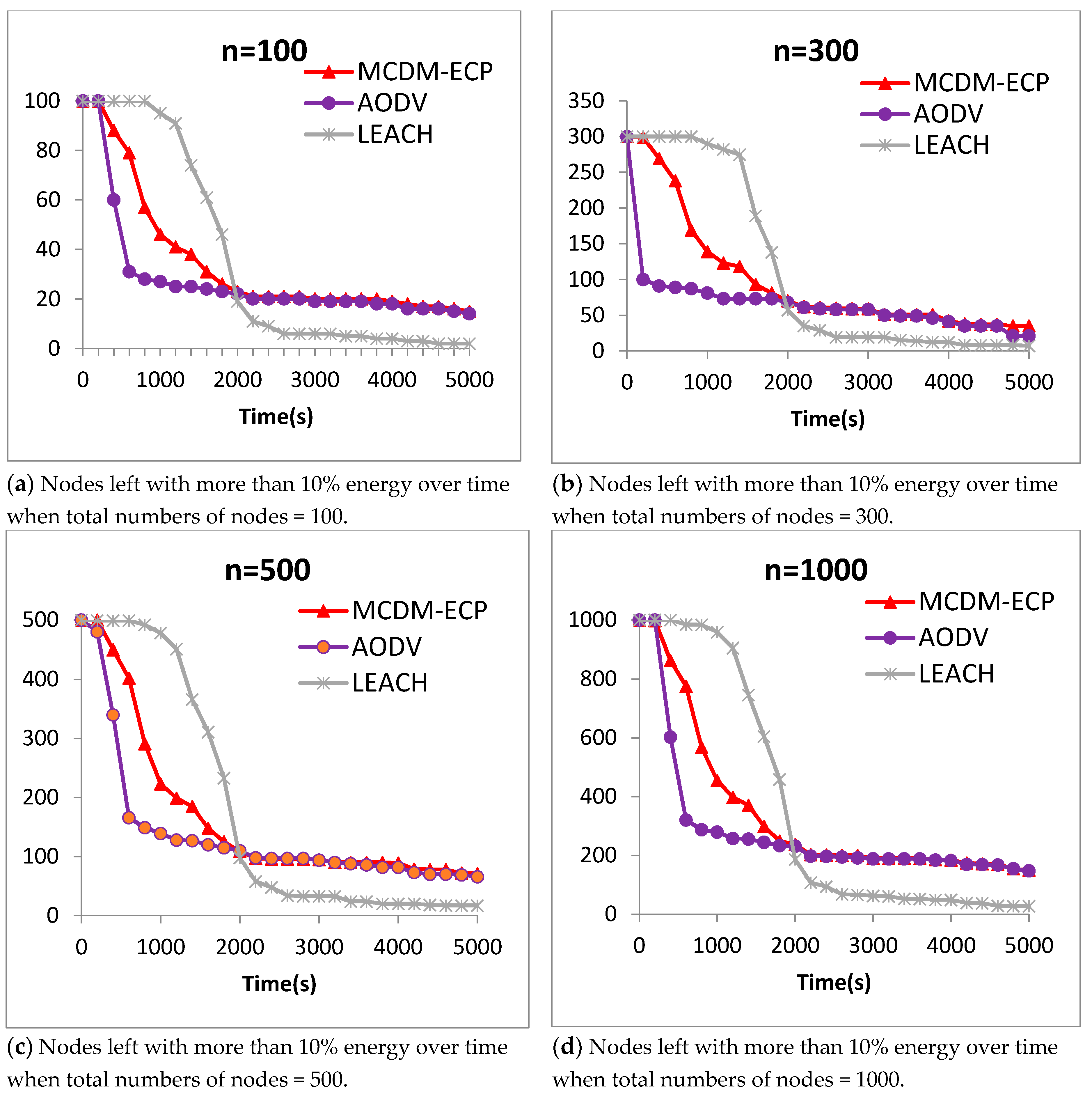
In order to evaluate the performance, we compare our proposed MCDM-ECP algorithm with other classical protocols through simulations in a set of emergency scenarios with different numbers of nodes. As nodes in ECNs consume energy to communicate with each other, the energy left with nodes critically impacts the efficiency, and thus the lifetime of the network. In our simulations, the emergency energy threshold is set to 10% according to [35] by Ramrekha, et al.
Figure 4 shows that the number of nodes that are left with more than 10% energy decreases with time. However, more nodes are left with energy above the threshold over time when the total number of nodes is bigger. This is because more nodes contribute to share the energy consumption by transferring the same messages in emergency communication networks.
Figure 5 illustrates that the number of nodes left with more than 10% energy is decreasing with time in each protocol. At the beginning of emergency communication (0–2000 s), LEACH performs better than MCDM-ECP and AODV in energy consumption. This is because the cluster head selection process is not carried out frequently under LEACH protocol, since all of the nodes are fully charged at the beginning. After 2000 s, cluster heads selection simply relies on the energy left under LEACH protocol; there may be situations in which the nodes that are one or two hops away from ECVs still have to communicate with cluster heads, which may be far from ECVs. For MCDM-ECP, four criteria are considered to find probable next-hop; thus, it performs better in the long run.
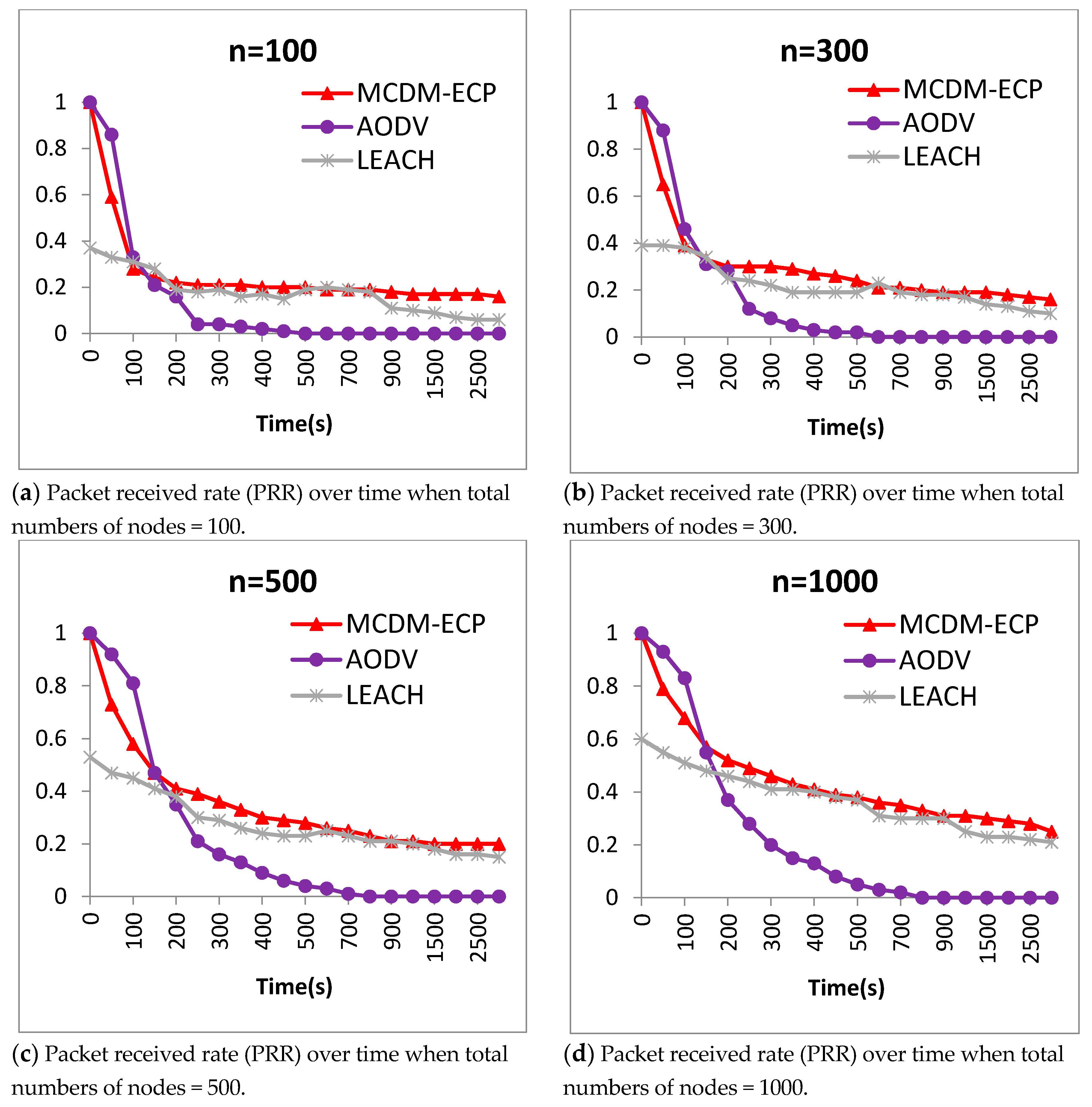
It can be seen from Figure 6 that PRR does not perform well in our simulations because of the poor communication conditions. PRR drops with time under each protocol. AODV shows the best performance at the beginning of emergency communication (0–150 s) on PRR, which is because nodes can find destinations easily by multicasting their requests with AODV protocol. After 150 s, MCDM-ECP gains the highest PRR due to the multi-criteria method, while AODV performs the worst, since too much energy is consumed on multicasting requests. LEACH performs slightly worse than MCDM-ECP after 150 s, as the energy load is evenly distributed among the nodes in the network.
In emergency communications, rescue and post-disaster recovery for long periods are needed; thus, the performance over the long term is more important than in the short term. Our proposed MCDM-ECP algorithm performs better regarding energy consumption as well as in PRR than the other two protocols we discussed.
6. Conclusions
Traditional routing algorithms cannot satisfy the requirements of networks for emergency communication scenarios, because of the topology dynamics and limited power characterizing these networks. These characteristics make DAWNs ideal for emergency and rescue scenarios in various disasters, in which sharing information is essential, and should occur as soon as possible. In this paper, we designed a hybrid DAWN topology in order to adapt with the mobility of rescuers in various disasters for emergency communication scenarios. The characteristics of three disaster cases—earthquakes, typhoons, fires—were analyzed. Four criteria for decision making were settled not only from the perspective of the decision-making environment, but also from the perspective of the decision objective. We consider the four aspects as decision criteria that cover all of the decision-making aspects in disasters for next-hop selection. We use the AHP-TOPSIS method to calculate the weights and the judgment matrix for the selected criteria. Based on the link characterization of DAWNs, we proposed the MCDM-ECP algorithm that utilized the AHP-TOPSIS method to find the optimal next-hop node in DAWNs. Routing discovery and routing maintenance processes are included in the novel protocol. The algorithm can not only reduce the energy consumption for mobile nodes, it can also extend the network lifetime for DAWNs, which is of great importance for disaster relief. The simulation results showed that MCDM-ECP performs better than other classical protocols (AODV, LEACH) both in energy consumption and PRR for long-term emergency communications. We believe that this work can provide new insights on emergency communication networks.
Author Contributions
All authors contributed equally to the work, and have read and approved the final manuscript.
Acknowledgments
This work was supported by Science and Technology Commission of Shanghai Municipality under Grant No. 18DZ1200500, the NSF of China under Grant No. 71171045, No. 61301118 and No. 61772130. We would like to show our deepest gratitude to the corresponding reviewers, who have provided us with valuable guidance in every stage of the writing of this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Solomon, S.; Qin, D.; Manning, M.; Marquis, M.; Averyt, K.; Tignor, M.M.B., Jr.; Miller, H.L.; Chen, Z. Climate Change 2007: The Physical Science Basis; Cam-bridge University Press: Cambridge, UK, 2007; p. 996. [Google Scholar]
- Fragkiadakis, A.G.; Askoxylakis, I.; Tragos, E.; Verikoukis, C. Ubiquitous robust communications for emergency response using multi-operator heterogeneous networks. EURASIP J. Wirel. Commun. Netw. 2011, 2011, 13. [Google Scholar] [CrossRef]
- Dilmaghani, R.; Rao, R. Hybrid wireless mesh network with application to emergency scenarios. J. Softw. 2008, 3, 52–60. [Google Scholar] [CrossRef]
- Ghose, T. Climate Change May Be Worsening Western Wildfires, Live- Science. Available online: http://www.livescience.com/41877-Western-Wildfires-Getting-Worse.html (accessed on 11 December 2013).
- McGhee, T. 4,167 Colorado Wildfires Caused Record Losses of $538 Million in 2012; The Denver Post: Denver, CO, USA, 2013. [Google Scholar]
- Ertem, M.A.; Buyurgan, N. An auction-based framework for resource allocation in disaster relief. J. Humanit. Logist. Supply Chain Manag. 2011, 1, 170–188. [Google Scholar] [CrossRef]
- Liu, N.; Ye, Y. Humanitarian logistics planning for natural disaster response with Bayesian information updates. J. Ind. Manag. Optim. 2014, 10, 665–689. [Google Scholar]
- Wex, F.; Schryen, G.; Feuerriegel, S.; Neumann, D. Emergency response in natural disaster management: Allocation and scheduling of rescue units. Eur. J. Oper. Res. 2014, 235, 697–708. [Google Scholar] [CrossRef] [Green Version]
- Minciardi, R.; Sacile, R.; Trasforini, E. Resource allocation in integrated preop-erational and operational management of natural hazards. Risk Anal. 2009, 29, 62–75. [Google Scholar] [CrossRef] [PubMed]
- Dodo, A.; Davidson, R.A.; Xu, N.X.; Nozick, L.K. Application of regional earthquake mitigation optimization. Comput. Oper. Res. 2007, 34, 2478–2494. [Google Scholar] [CrossRef]
- Chang, M.-S.; Tseng, Y.L.; Chen, J.-W. A scenario planning approach for the flood emergency logistics preparation problem under uncertainty. Transp. Res. Part E Logist. Transp. Rev. 2007, 43, 737–754. [Google Scholar] [CrossRef]
- Zheng, Y.-J.; Ling, H.-F. Emergency transportation planning in disaster relief supply chain management: A cooperative fuzzy optimization approach. Soft Comput. 2013, 17, 1301–1314. [Google Scholar] [CrossRef]
- Onan, K.; Ülengin, F.; Sennaroglu, B. An evolutionary multi-objective optimiza-tion approach to disaster waste management: A case study of Istanbul, Turkey. Expert Syst. Appl. 2015, 42, 8850–8857. [Google Scholar] [CrossRef]
- Guo, W.; Huang, X. Mobility model and relay management for disaster area wireless networks. In Proceedings of the International Conference on Wireless Algorithms, Systems, and Applications, Dallas, TX, USA, 26–28 October 2008; pp. 274–285. [Google Scholar]
- Bilbao, M.N.; Ser, J.D.; Perfecto, C.; Salcedo-Sanz, S.; Portilla-Figueras, J.A. Cost-efficient deployment of multi-hop wireless networks over disaster areas using multi-objective meta-heuristics. Neurocomputing 2018, 271, 18–27. [Google Scholar] [CrossRef] [Green Version]
- Mota, V.F.S.; Cunha, F.D.; Macedo, D.F.; Nogueira, M.S.; Loureiro, A.F. Protocols, mobility models and tools in opportunistic networks: A survey. Comput. Commun. 2014, 48, 5–19. [Google Scholar] [CrossRef]
- Bhorkar, A.A.; Naghshvar, M.; Javidi, T.; Rao, B.D. Adaptive opportunistic routing for wireless ad hoc networks. IEEE ACM Trans. Netw. 2012, 20, 243–256. [Google Scholar] [CrossRef]
- Kuntze, H.-B.; Frey, C.W.; Chouchenkov, I.T.; Staehle, B.; Rome, E.; Pfeiffer, K.; Wenzel, A.; Wollenstein, J. Seneka-sensor network with mobile robots for disaster management. In Proceedings of the IEEE HST, Waltham, MA, USA, 13–15 November 2012. [Google Scholar]
- Takeuchi, Y. Radio Policy in Japan. In Proceedings of the Ministry of Internal Affairs and Communications, Tokyo, Japan, 21 September 2011. [Google Scholar]
- Rahman, T.F.; Sacchi, C. Opportunistic radio access techniques for emergency communications: Preliminary analysis and results. In Proceedings of the 2012 IEEE First AESS European Conference on Satellite Telecommunications (ESTEL), Rome, Italy, 2–5 October 2012. [Google Scholar]
- West, D.M.; Valentini, E. How Mobile Devices Are Transforming Disaster Relief and Public Safety; White Paper; Center for Technology Innovation at Brookings (Issues in Technology Innovation): Washington, DC, USA, 2013. [Google Scholar]
- Baldini, G.; Vergari, F.; Karanasios, S.; Allen, D. Survey of wireless communication technologies for public safety. IEEE Commun. Surv. Tutor. 2014, 16, 619–641. [Google Scholar] [CrossRef]
- Reina, D.G.; Askalani, M.; Toral, S.L.; Barrero, F.; Asimakopoulou, E.; Bessis, N. A survey on multihop ad hoc networks for dis- aster response scenarios. Int. J. Distrib. Sens. Netw. 2015, 2015, 16. [Google Scholar] [CrossRef]
- Amaldi, E.; Capone, A.; Cesana, M.; Filippini, I.; Malucelli, F. Optimization models and methods for planning wireless mesh networks. Comput. Netw. 2008, 52, 2159–2171. [Google Scholar] [CrossRef]
- Younis, M.; Akkaya, K. Strategies and techniques for node placement in wireless sensor networks: A survey. AdHoc Netw. 2008, 6, 621–655. [Google Scholar] [CrossRef]
- Benyamina, D.; Hafid, A.; Gendreau, M. Wireless mesh networks design—A survey. IEEE Commun. Surv. Tutor. 2012, 14, 299–310. [Google Scholar] [CrossRef]
- Pathak, P.H.; Dutta, R. A survey of network design problems and joint design approaches in wireless mesh networks. IEEE Commun. Surv. Tutor. 2011, 13, 396–428. [Google Scholar] [CrossRef]
- Merlin, S.G.; Nachiappan, A. A review on optimal node placement methods in wireless mesh network planning. i-Manag. J. Wirel. Commun. Netw. 2014, 3, 35–40. [Google Scholar]
- Khou, I.; Minet, P.; Laouiti, A.; Mahfoudh, S. Survey of deployment algorithms in wireless sensor networks: Coverage and connectivity issues and challenges. Int. J. Auton. Adapt. Commun. Syst. 2014, 24. [Google Scholar] [CrossRef]
- Wang, J.; Wu, Y.; Yen, N.; Guo, S.; Cheng, Z. Big Data Analytics for Emergency Communication Networks: A Survey. IEEE Commun. Surv. Tutor. 2016, 18, 1758–1778. [Google Scholar] [CrossRef]
- Sharma, V.; Sharma, S. Low Energy Consumption based Patient Health Monitoring by LEACH Protocol. In Proceedings of the 2017 International Conference on Inventive Systems and Control (ICISC), Coimbatore, India, 19–20 January 2017. [Google Scholar]
- Ray, N.K.; Turuk, A.K. A framework for disaster management using wireless ad hoc networks. In Proceedings of the 2011 International Conference on Communication, Computing & Security, Rourkela, India, 12–14 February 2011; pp. 138–141. [Google Scholar]
- Ko, Y.B.; Vaidya, N.H. Location Aided Routing (LAR) in mobile ad hoc networks. Wirel. Netw. 2000, 6, 307–321. [Google Scholar] [CrossRef]
- Martín-Campillo, A.; Crowcroft, J.; Yoneki, E.; Marti, R. Evaluating opportunistic networks in disaster scenarios. J. Netw. Comput. Appl. 2013, 36, 870–880. [Google Scholar] [CrossRef]
- Ramrekha, T.A.; Politis, C.A. Hybrid Adaptive Routing Protocol for Extreme Emergency Ad Hoc Communication. In Proceedings of the 19th International Conference on Computer Communications and Networks, Zurich, Switzerland, 2–5 August 2010; pp. 1–6. [Google Scholar]
- Panaousis, E.A.; Ramrekha, T.A.; Millar, G.P.; Politis, C. Adaptive and secure routing protocol for emergency mobile ad hoc networks. Int. J. Wirel. Mob. Netw. 2010, 2, 62–78. [Google Scholar] [CrossRef]
- Ramrekha, T.A.; Talooki, V.N.; Rodriguez, J.; Politis, C. Energy efficient and scalable routing protocol for extreme emergency ad hoc communications. Mob. Netw. Appl. 2012, 17, 312–324. [Google Scholar] [CrossRef]
- Ramrekha, T.A.; Politis, C. Mobile Lightweight Wireless Systems. In An Adaptive QoS Routing Solution for Manet Based Multimedia Communications in Emergency Cases; Springer: Berlin/Heidelberg, Germany, 2009; pp. 74–84. [Google Scholar]
- Li, Y.; Yu, N.; Zhang, W.; Zhao, W.; You, X.; Daneshmand, M. Enhancing the performance of LEACH protocol in wireless sensor networks. In Proceedings of the 2011 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Shanghai, China, 10–15 April 2011; pp. 223–228. [Google Scholar]
- Saaty, T.L. Decision making with the analytic hierarchy process. Int. J. Serv. Sci. 2008, 1, 83–98. [Google Scholar] [CrossRef]
- Wang, E. Benchmarking whole-building energy performance with multi-criteria technique for order preference by similarity to ideal solution using a selective objective-weighting approach. Appl. Energy 2015, 146, 92–103. [Google Scholar] [CrossRef]
- Ren, J.; Liang, H.; Chan, F.T.S. Urban sewage sludge, sustainability, and transition for Eco-City: Multi-criteria sustainability assessment of technologies based on best-worst method. Technol. Forecast. Soc. Chang. 2017, 116, 29–39. [Google Scholar] [CrossRef]
- Arslan, T. A Weighted Euclidean Distance based TOPSIS Method for Modeling Public Subjective Judgments. Asia-Pac. J. Oper. Res. 2017, 34, 1750004. [Google Scholar] [CrossRef]
- Singh, V.; Reena, D. Efficient routing by minimizing end to end delay in delay tolerant enabled VANETs. Int. Bull. Math. Res. 2015, 2, 241–245. [Google Scholar]
Figure 1.
Disaster Area Wireless Network (DAWN) topology.

Figure 2.
Initialization procedure of multi-criteria decision-making method for emergency communication protocol (MCDM-ECP).
Figure 2.
Initialization procedure of multi-criteria decision-making method for emergency communication protocol (MCDM-ECP).

Figure 3.
Data transmission procedure of MCDM-ECP.

Figure 4.
Nodes left with more than 10% energy over time.

Figure 5.
Nodes left with more than 10% energy over time.

Figure 6.
Packet received rate (PRR) over time.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Routing Table of Node A. ECVs: Emergency Communication Vehicles.
| Destination | Hop | Energy Consumed (EC) | Connected Nodes (CN) | Hop Counts to ECVs (HC) | Distance to the Nearest ECVs (DIS) |
|---|---|---|---|---|---|
| B | 1 | 30% | 3 | 2 | 100 |
| C | 2 | 60% | 5 | 1 | 40 |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| X | 1 | 40% | 4 | 3 | 80 |
Table 2.
Hello Messages (HM) data format.
| Type | EC | CN | HC | DIS | IP0 | IP1 | IP2 | … | IPn |
Table 3.
Simulation Parameters.
| Parameters Descriptions | Values |
|---|---|
| Nodes distributions | 1000 m × 1000 m |
| ECV location | 1000 m × 630 m |
| Initial energy of nodes | 0.5 J |
| Control message size | 32 bit |
| Data message size | 4000 bit |
| ETX (Energy for transmitting per bit) | 50 × 0.000000001 J/bit |
| ERX (Energy for receiving per bit) | 50 × 0.000000001 J/bit |
| Efs (Effective power consumption of transmitter per bit) | 10 × 0.000000000001 J/bit |
| Emp (Transmitter gain control per bit in space) | 0.0013 × 0.000000000001 J/bit |
| EDA (data aggregation energy per bit) | 5 × 0.000000001 J/bit |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wang, X.; Li, D.; Zhang, X.; Cao, Y. MCDM-ECP: Multi Criteria Decision Making Method for Emergency Communication Protocol in Disaster Area Wireless Network. Appl. Sci. 2018, 8, 1165. https://doi.org/10.3390/app8071165
AMA Style
Wang X, Li D, Zhang X, Cao Y. MCDM-ECP: Multi Criteria Decision Making Method for Emergency Communication Protocol in Disaster Area Wireless Network. Applied Sciences. 2018; 8(7):1165. https://doi.org/10.3390/app8071165
Chicago/Turabian StyleWang, Xiaoming, Demin Li, Xiaolu Zhang, and Yongsheng Cao. 2018. "MCDM-ECP: Multi Criteria Decision Making Method for Emergency Communication Protocol in Disaster Area Wireless Network" Applied Sciences 8, no. 7: 1165. https://doi.org/10.3390/app8071165
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.