Oil Droplet Transport under Non-Breaking Waves: An Eulerian RANS Approach Combined with a Lagrangian Particle Dispersion Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Governing Equations: Eulerian RANS Framework
2.2. Governing Equations: Lagrangian Particle Dispersion Framework
2.3. Problem Setup
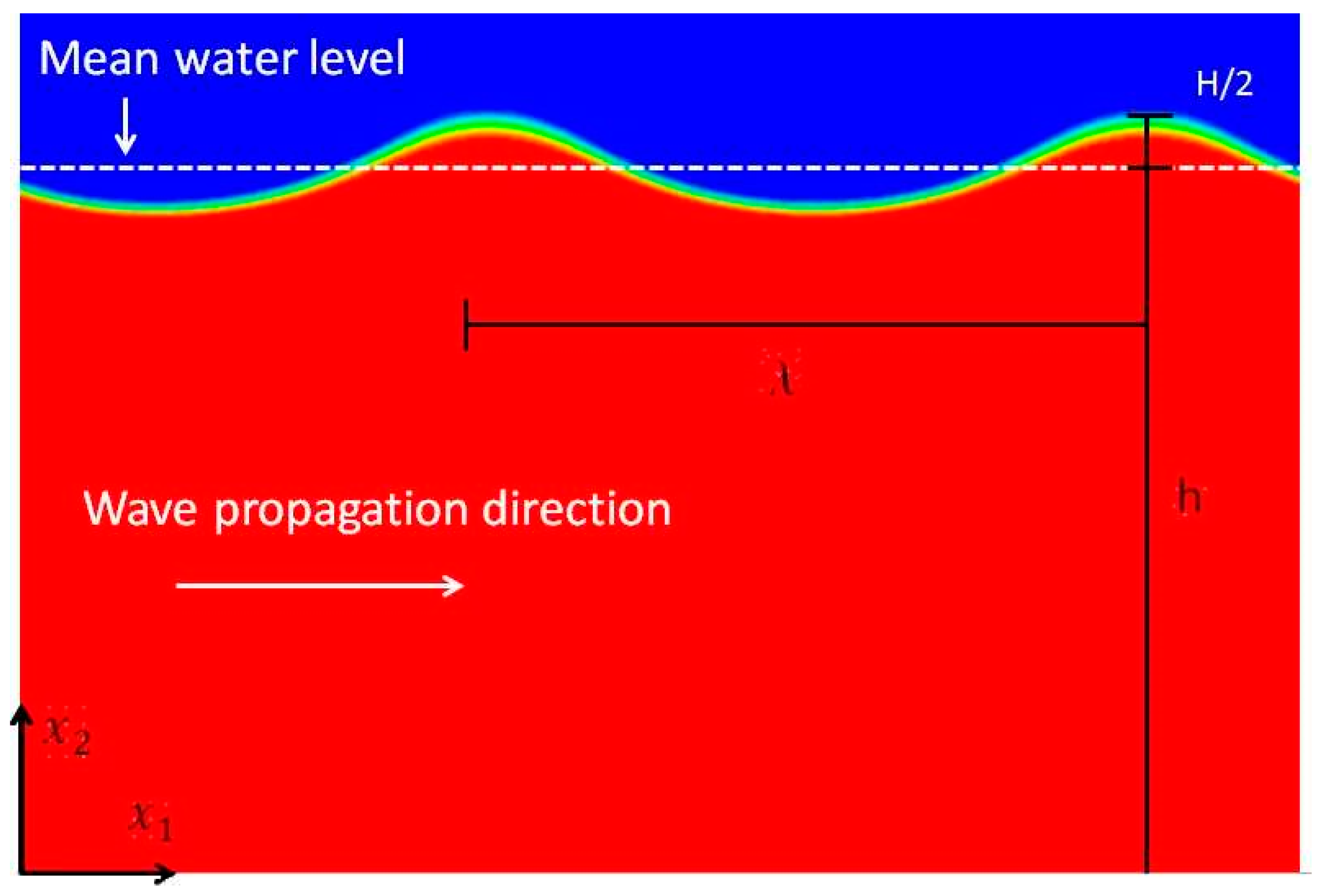
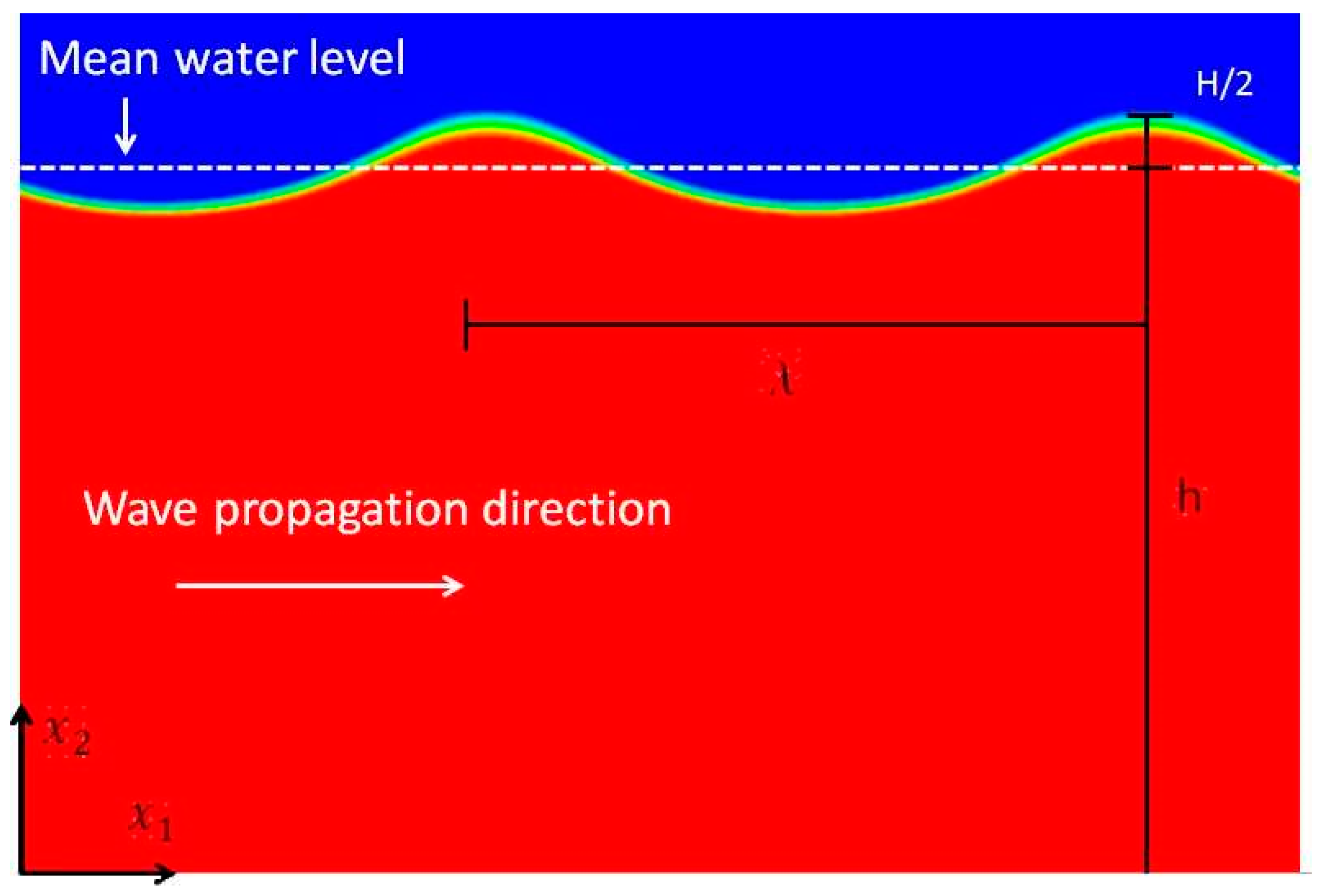
2.3.1. Wave Formulation
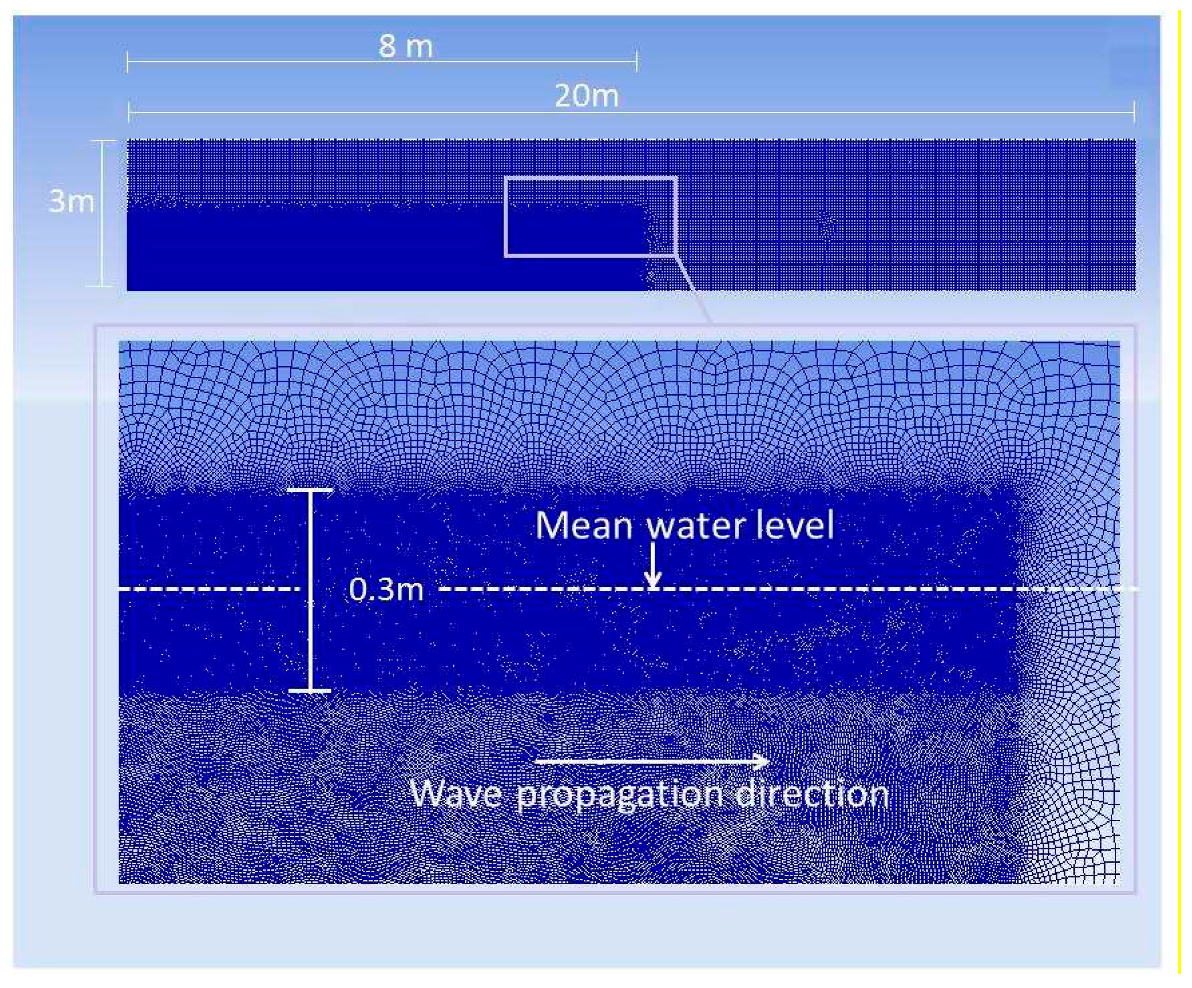
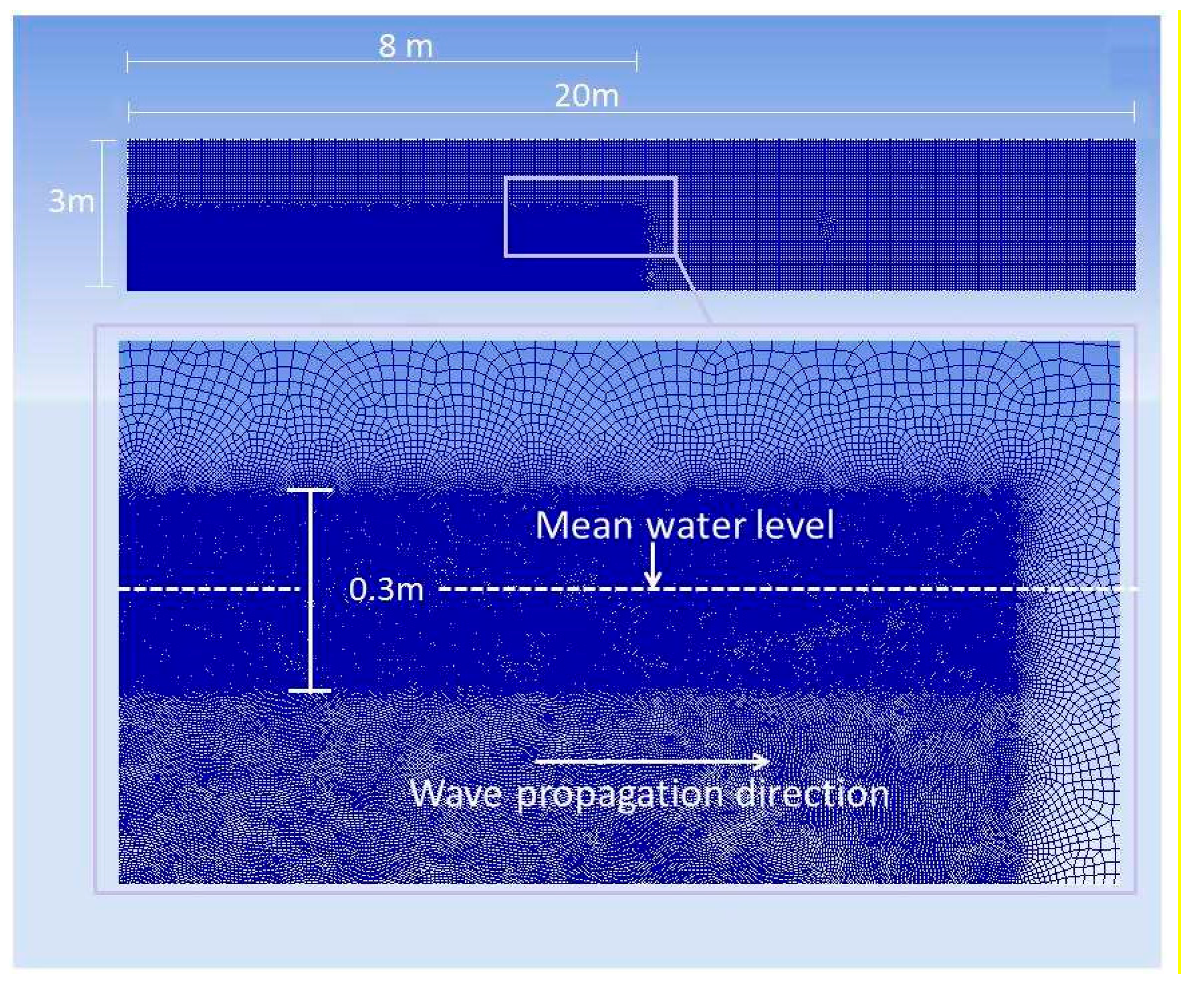
2.3.2. Flow Simulation
2.3.3. Particle Tracking
3. Results
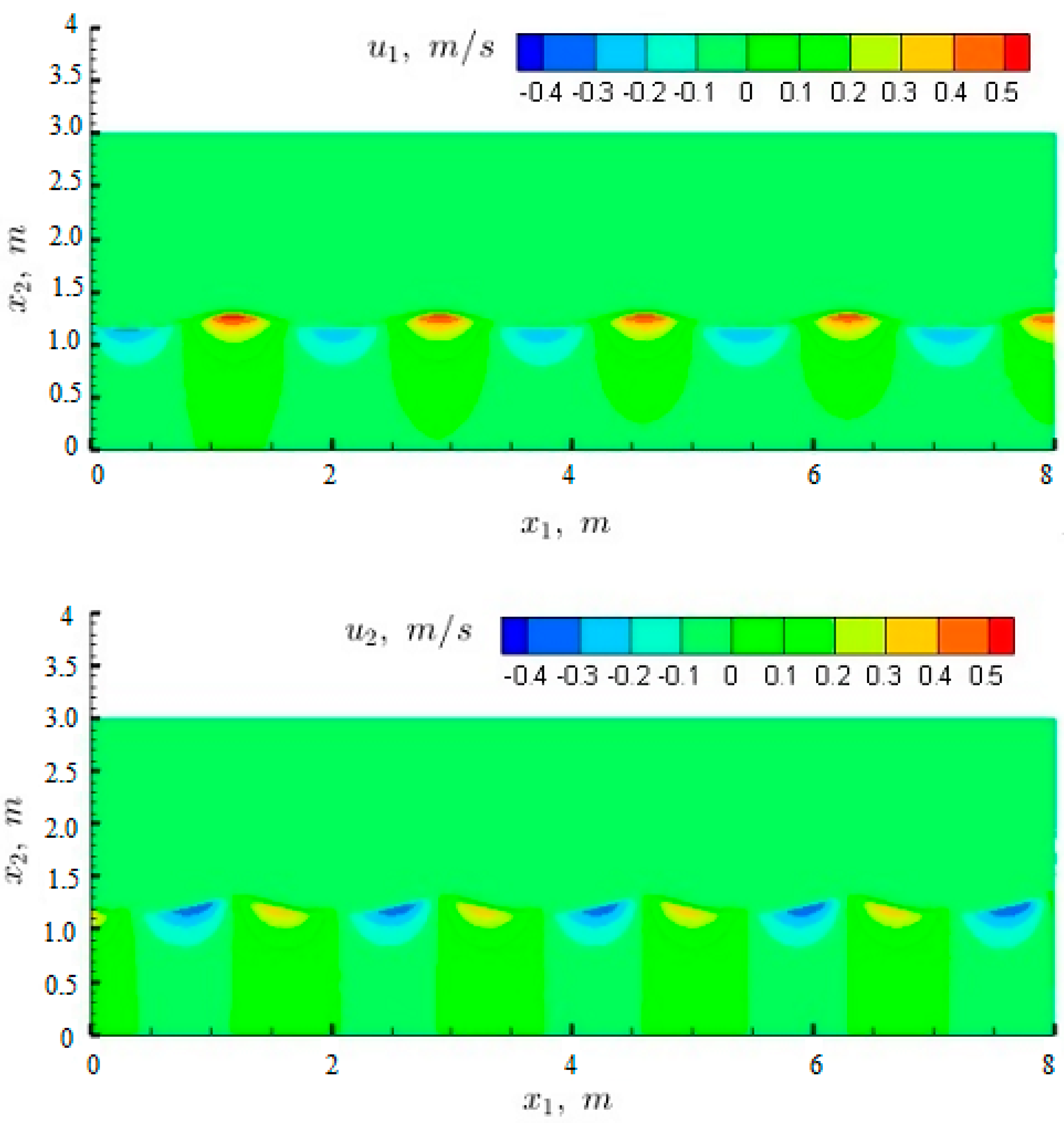
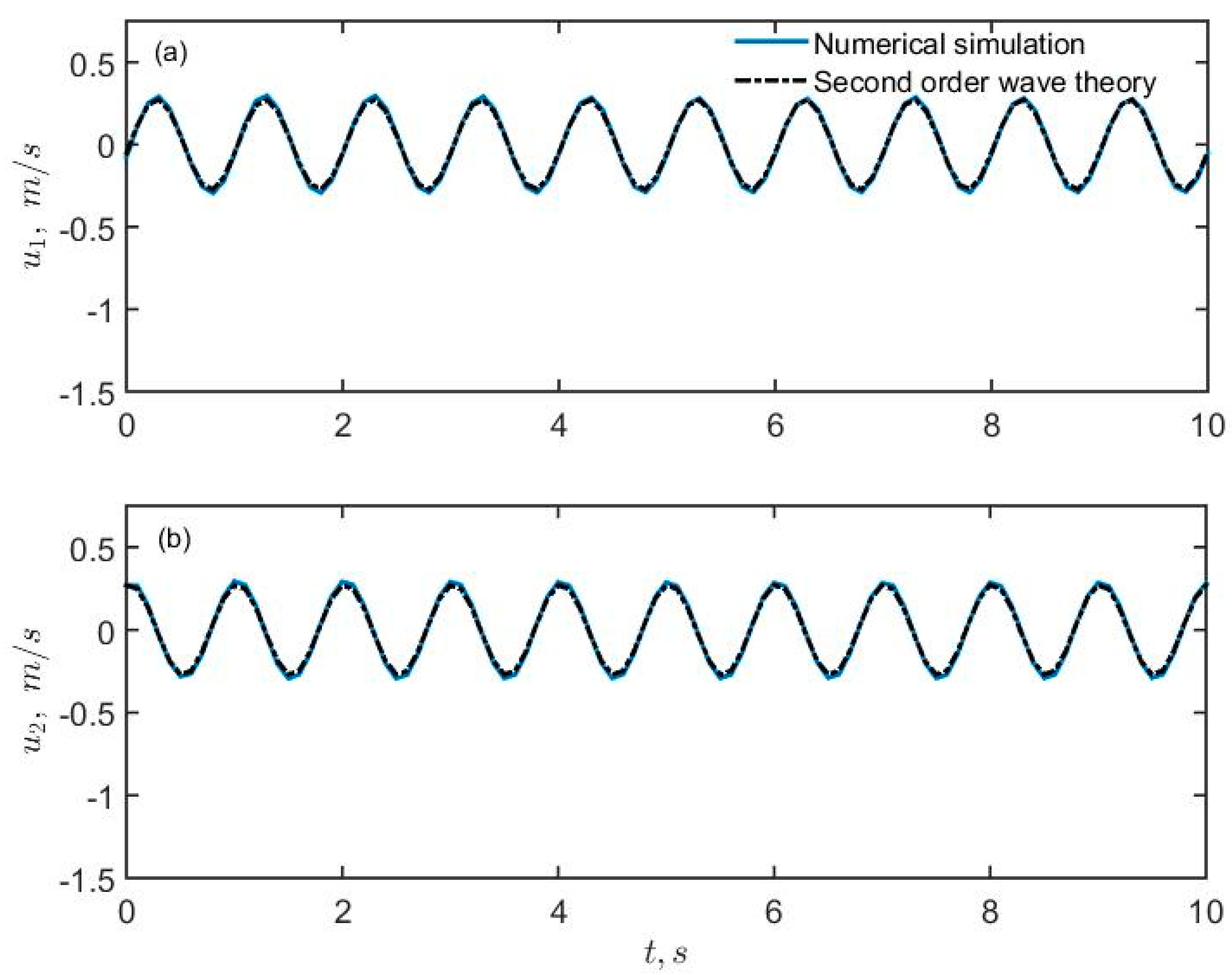
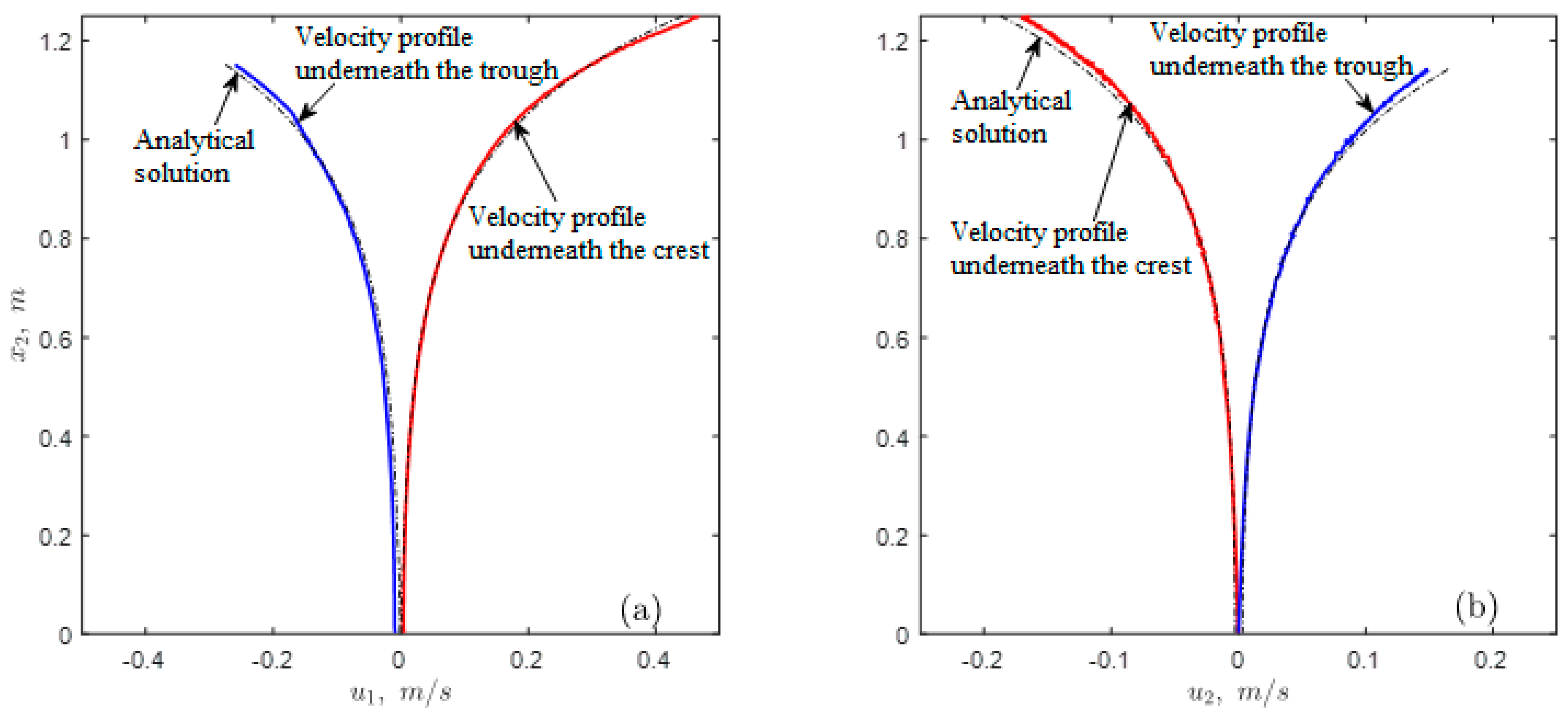
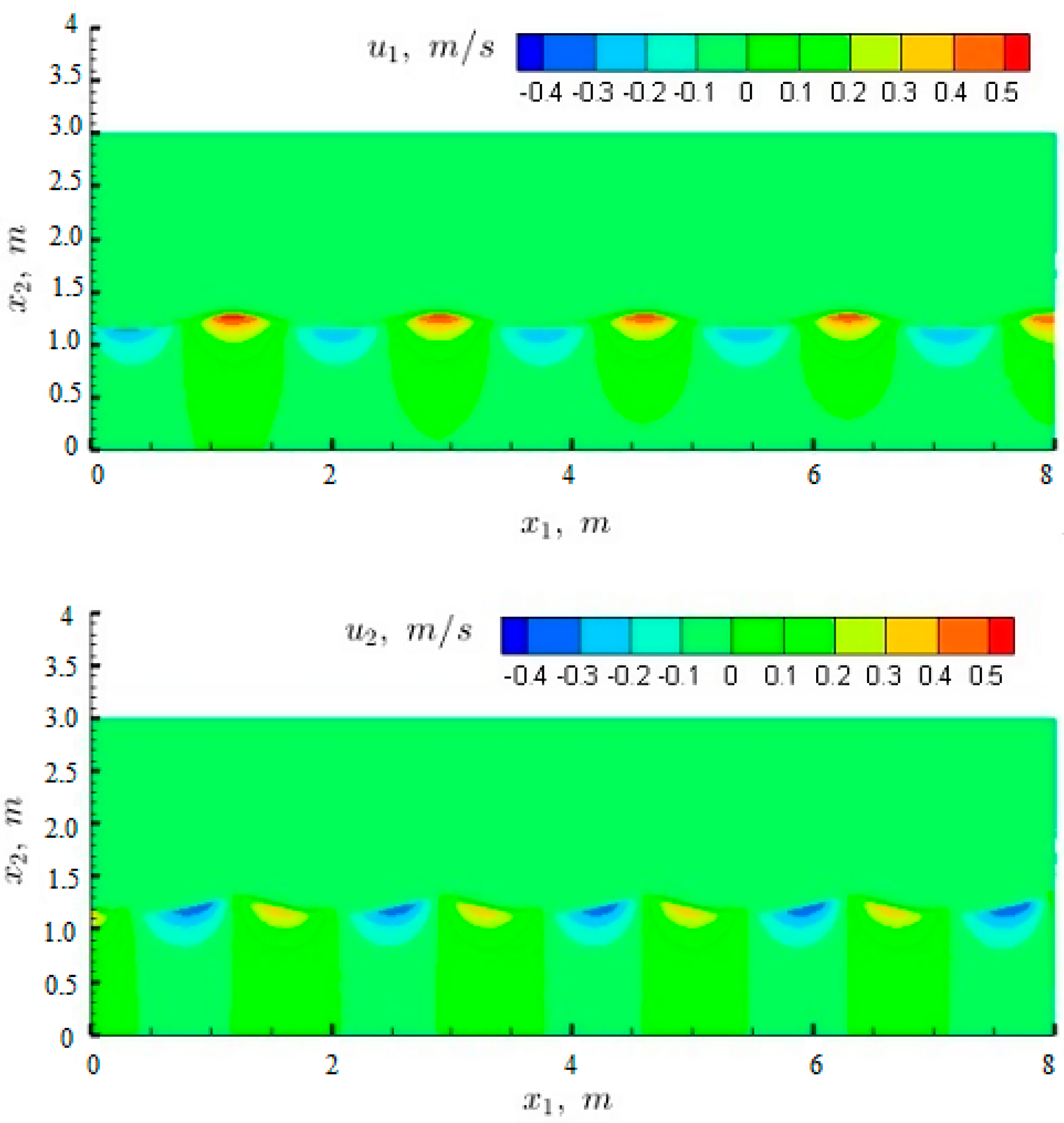
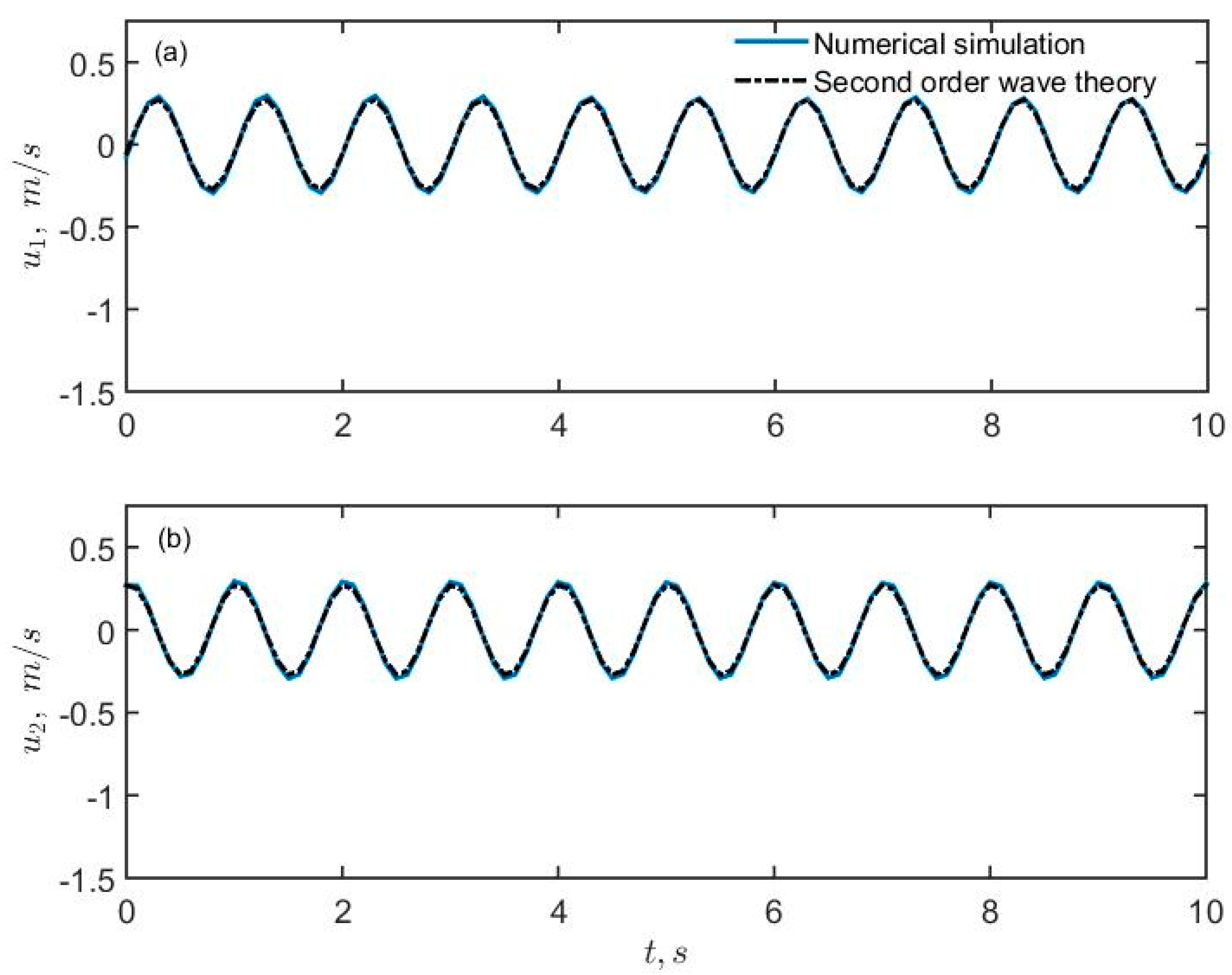
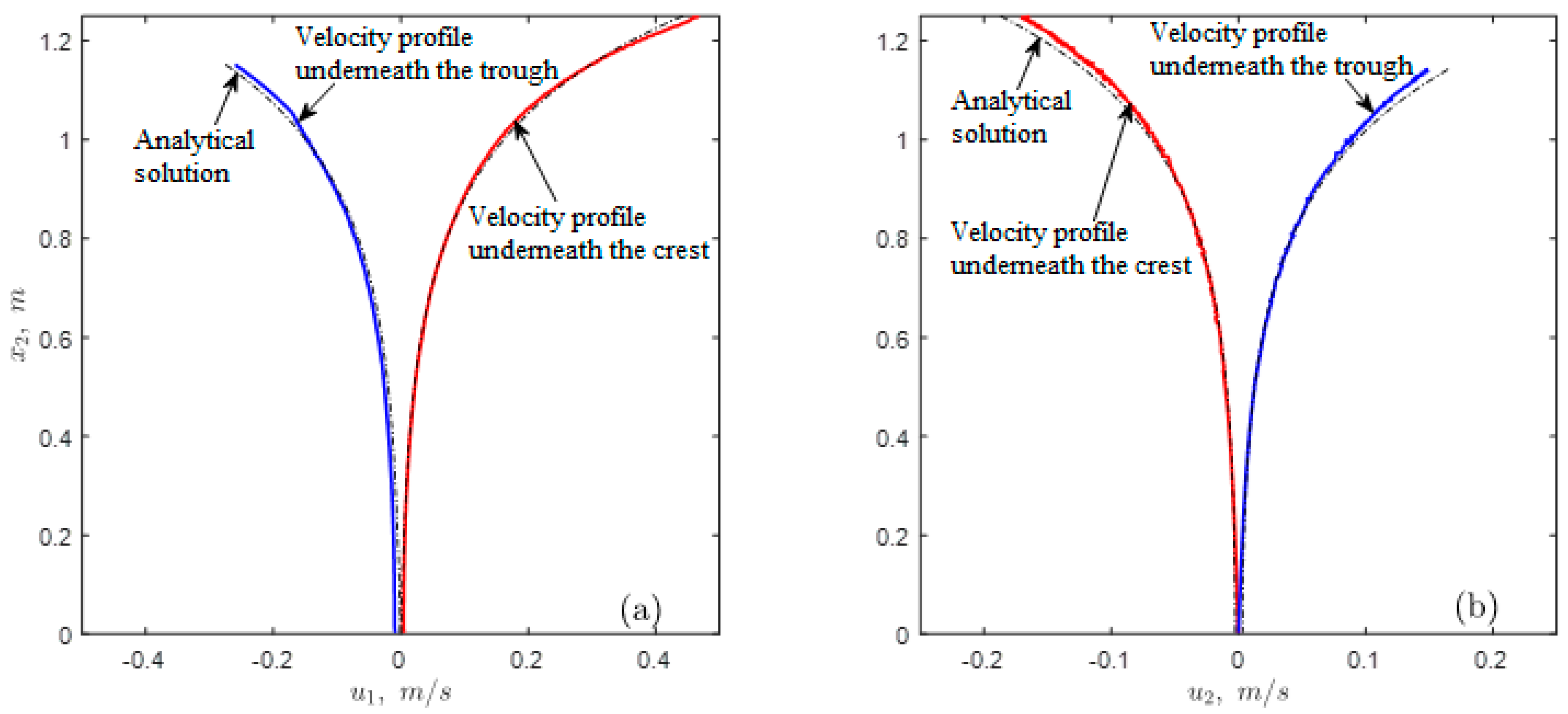
3.1. Numerical Simulation Validation
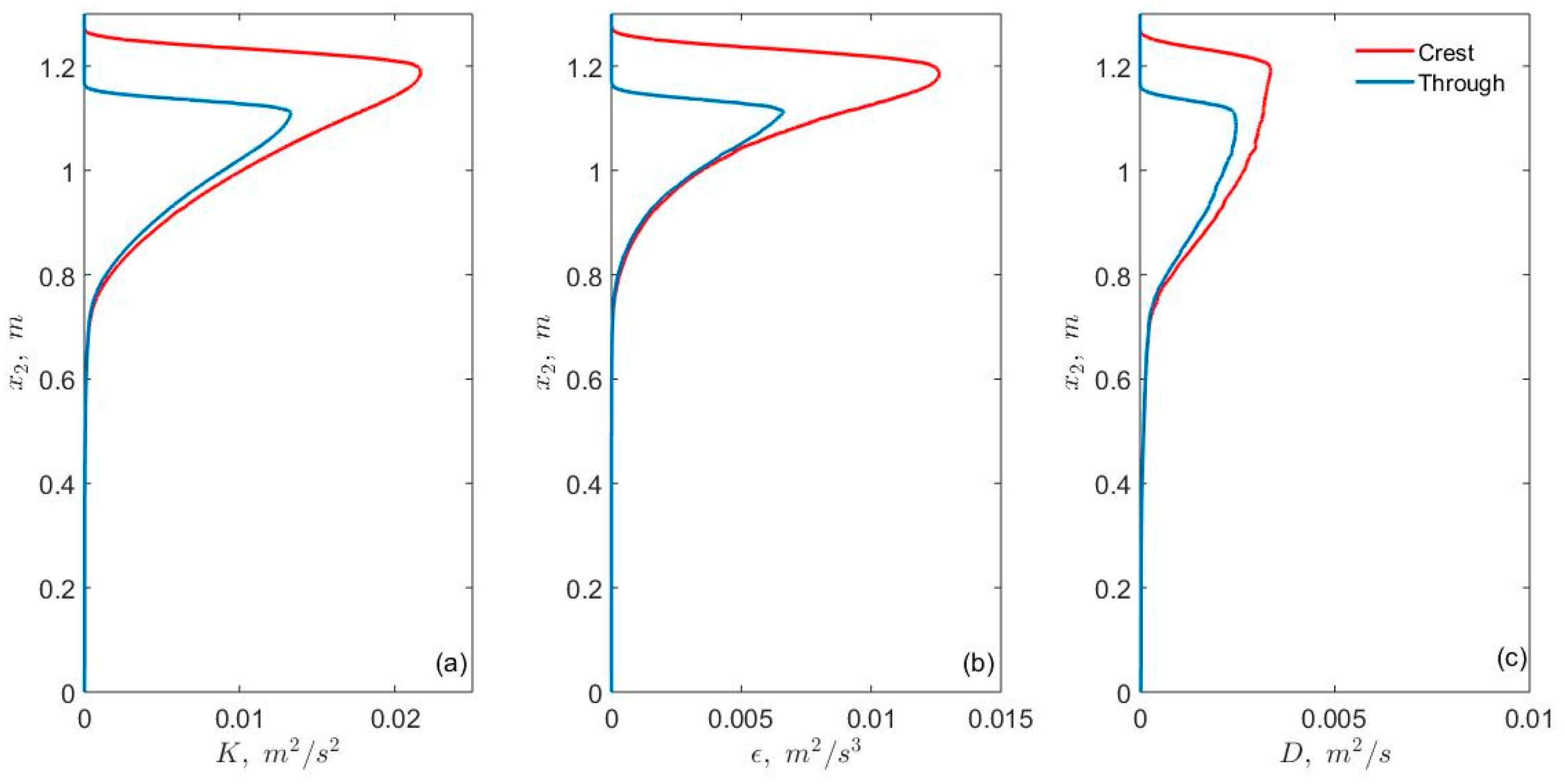
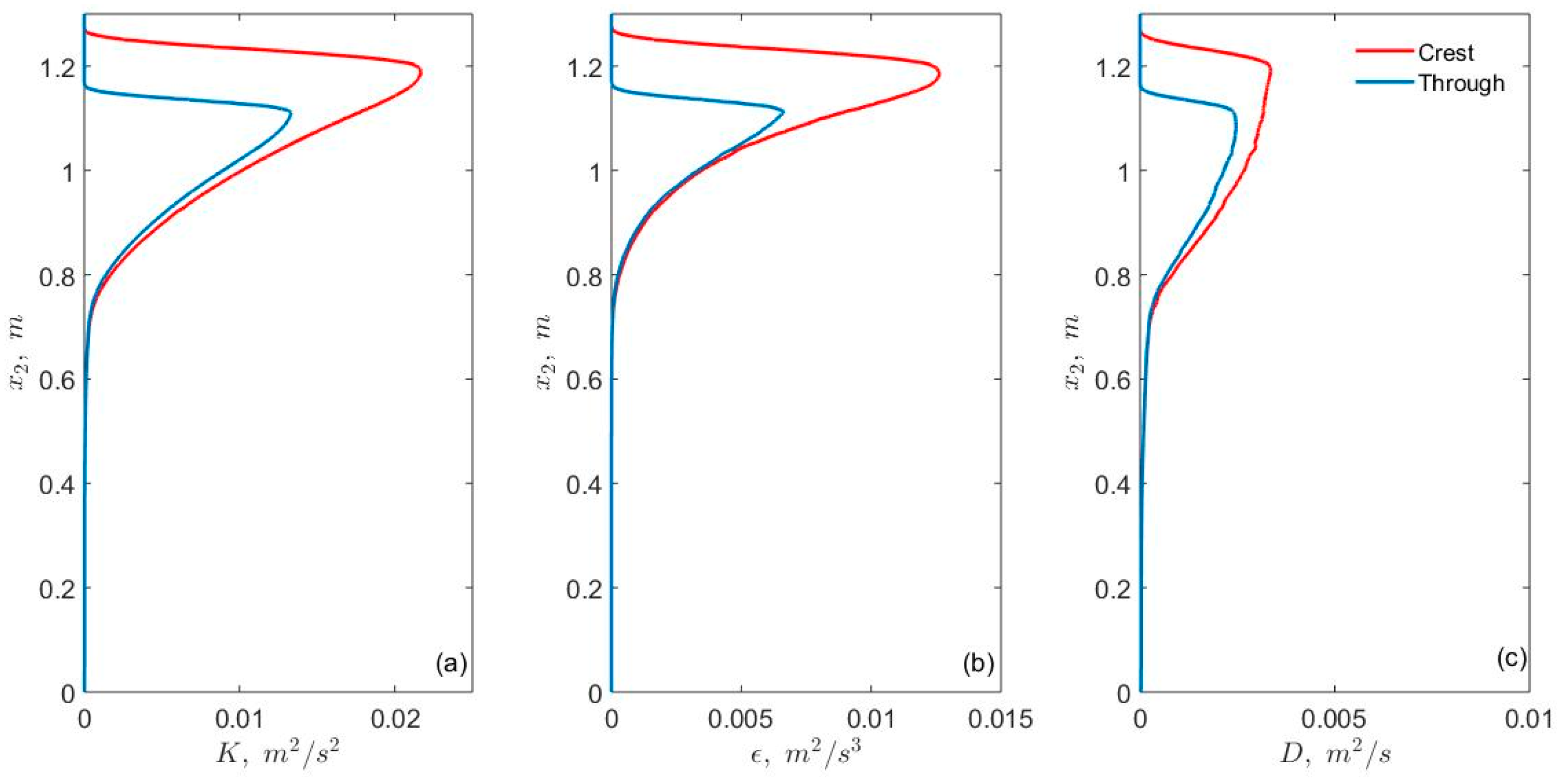
3.2. Vertical Profiles of Turbulent Quantities
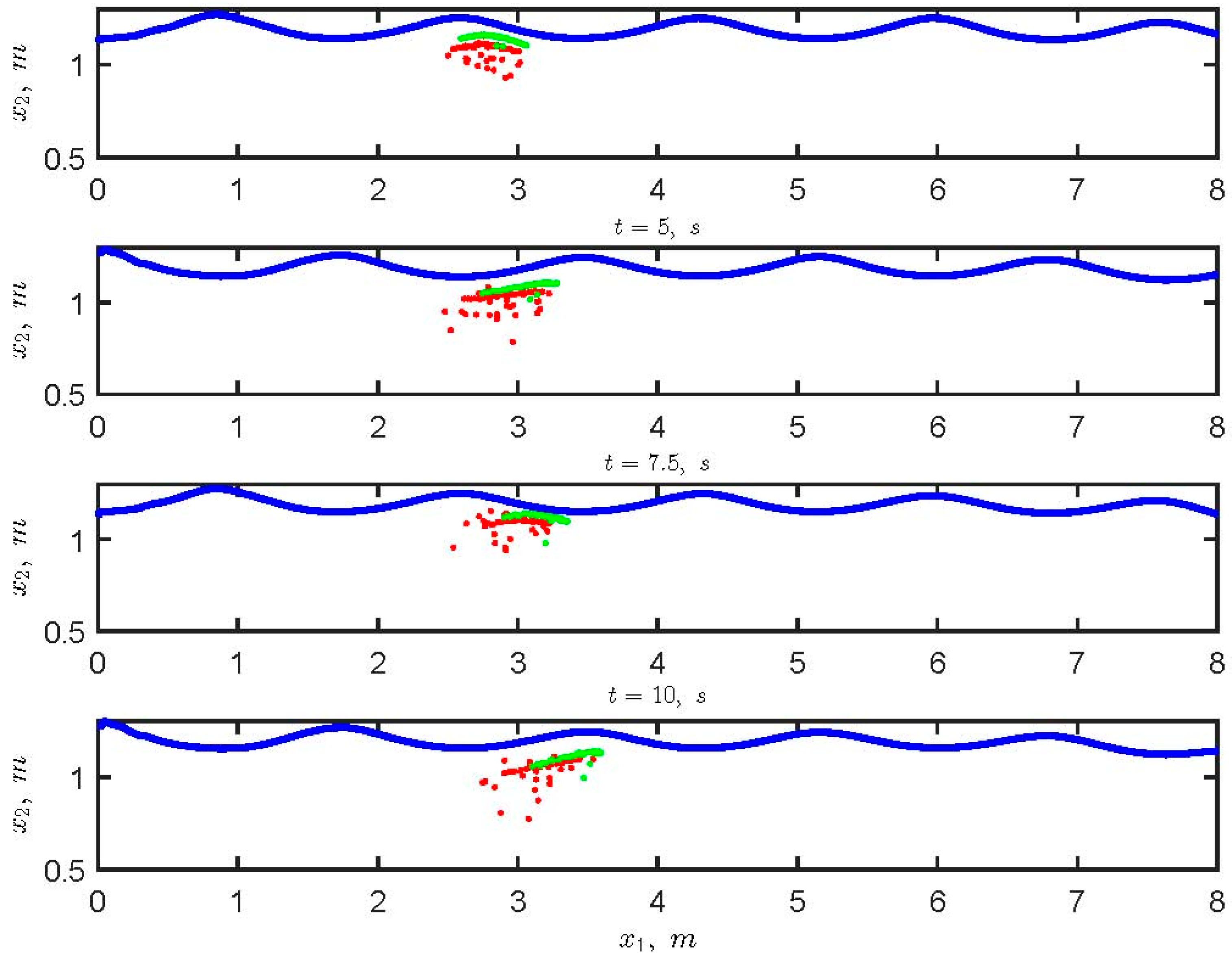
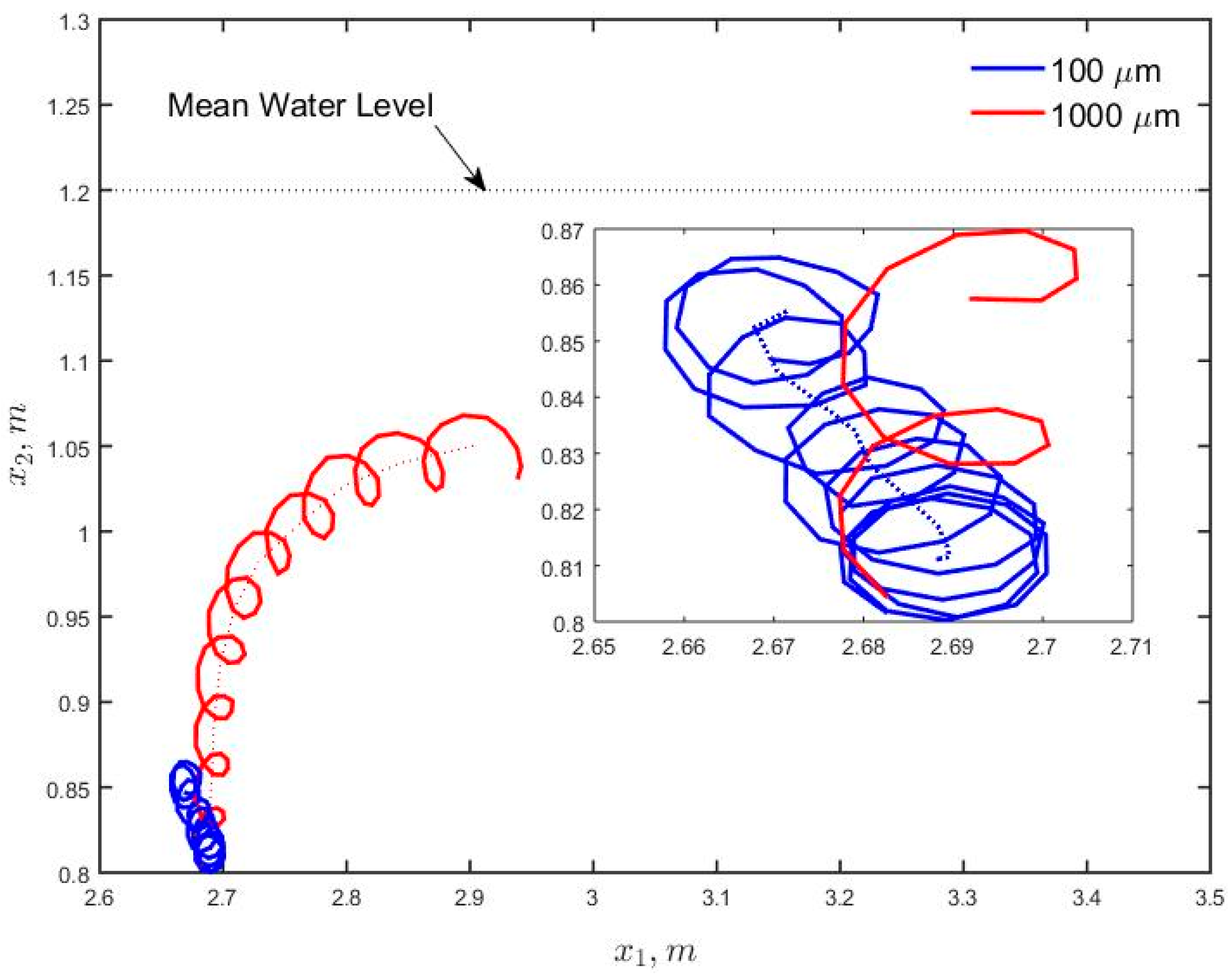
3.3. Particle Trajectories
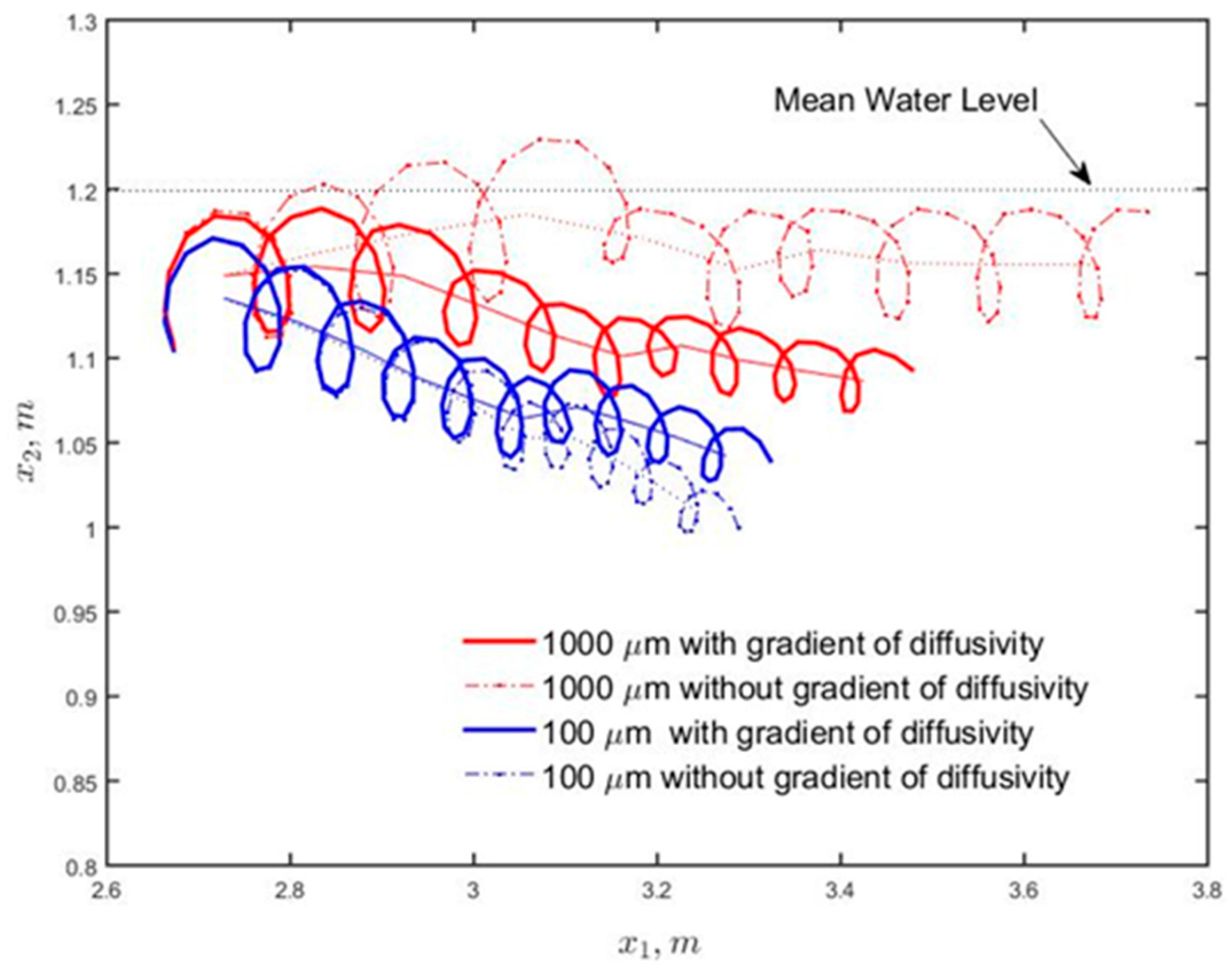
3.4. Effect of Turbulent Diffusion
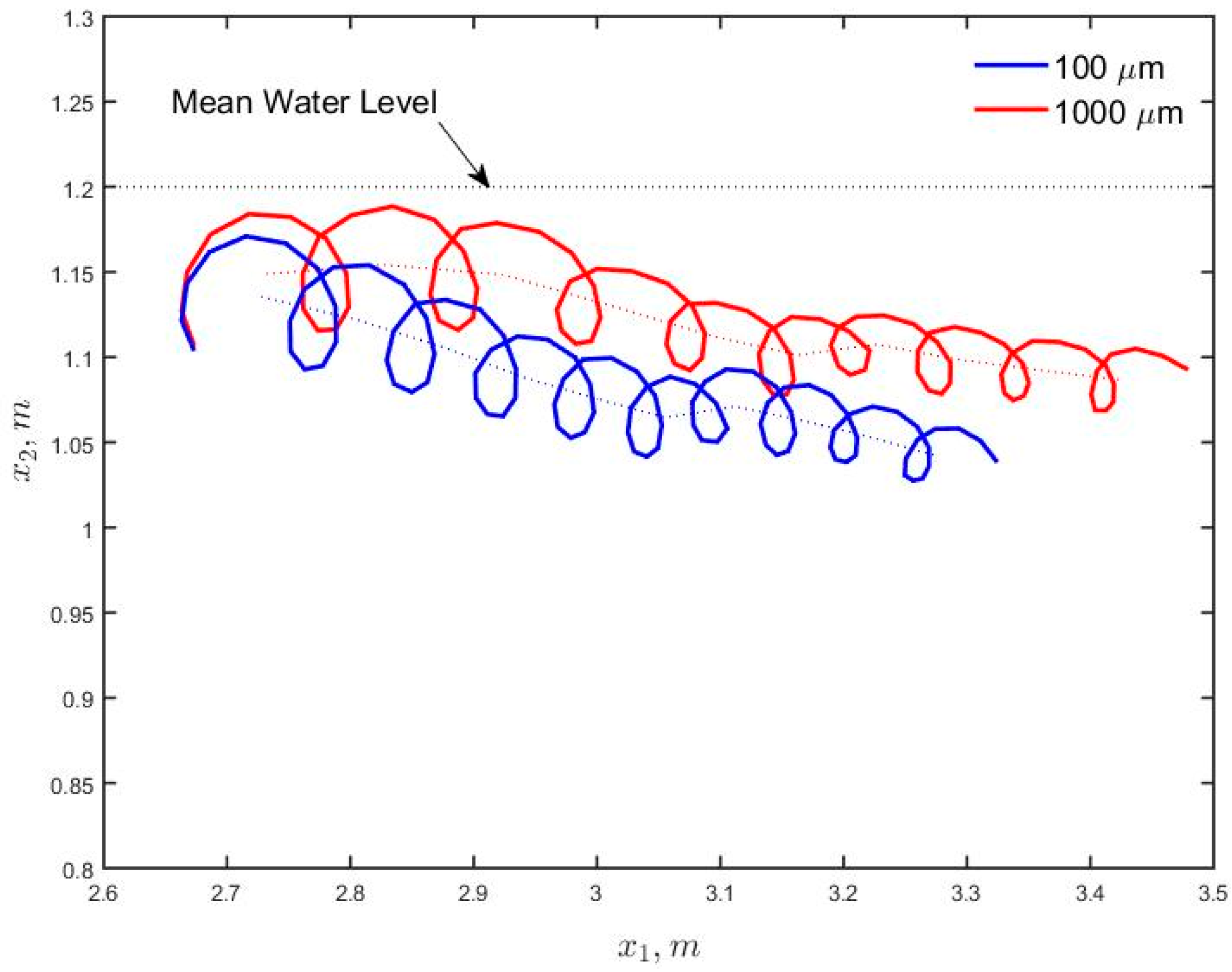
3.5. Stokes Drift Calculations
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sobey, R.; Barker, C. Wave-driven transport of surface oil. J. Coast. Res. 1997, 13, 490–496. [Google Scholar]
- Korotenko, K.A.; Bowman, M.J.; Dietrich, D.E. High-resolution numerical model for predicting the transport and dispersal of oil spilled in the Black Sea. Atmos. Ocean. Sci. 2010, 21, 123–136. [Google Scholar] [CrossRef]
- Zhao, L.; Torlapati, J.; Boufadel, M.C.; King, T.; Robinson, B.; Lee, K. VDROP: A comprehensive model for droplet formation of oils and gases in liquids-incorporation of the interfacial tension and droplet viscosity. Chem. Eng. J. 2014, 253, 93–106. [Google Scholar] [CrossRef]
- Boufadel, M.C.; Bechtel, R.D.; Weaver, J. The movement of oil under non-breaking waves. Mar. Pollut. Bull. 2006, 52, 1056–1065. [Google Scholar] [CrossRef] [PubMed]
- Lunel, T. Dispersion: Oil droplet size measurements at sea. In Proceedings of the 16th Arctic and Marine Oil Spill Program (AMOP), Calgary, AB, Canada, 7–9 June 1993; Technical Seminar. Environment Canada: Fredericton, NB, Canada, 1993; pp. 1023–1055. [Google Scholar]
- Yang, D.; Chamecki, M.; Meneveau, C. Inhibition of oil plume dilution in Langmuir ocean circulation. Geophys. Res. Lett. 2014, 41, 1632–1634. [Google Scholar] [CrossRef]
- Pohorecki, R.; Moniuk, W.; Bielski, P.; Zdrjkowski, A. Modelling of the coalescence/redispersion processes in bubble columns. J. Geophys. Res. 1988, 56, 572–586. [Google Scholar] [CrossRef]
- Mewes, D.; Loser, T.; Millies, M. Modelling of two-phase flow in packings and monolith. Chem. Eng. Sci. 1999, 54, 4729–4747. [Google Scholar] [CrossRef]
- Monismith, S.G.; Cowen, E.A.; Nepf, H.M.; Magnaudet, J.; Thais, I. Laboratory observations of mean flows under surface gravity waves. J. Fluid Mech. 2007, 573, 131–147. [Google Scholar] [CrossRef]
- Elliott, A.J.; Wallace, D.C. Dispersion of surface plumes in the southern north sea. Ocean Dyn. 1989, 42, 1–16. [Google Scholar] [CrossRef]
- Boufadel, M.C.; Du, K.; Kaku, V.; Weaver, J. Lagrangian simulation of oil droplets transport due to regular waves. Environ. Model. Softw. 2007, 22, 978–986. [Google Scholar] [CrossRef]
- Geng, X.; Boufadel, M.C.; Ozgokmen, T.; King, T.; Lee, K.; Lu, Y.; Zhao, L. Oil droplets transport due to irregular waves: Development of large-scale spreading coefficients. Mar. Pollut. Bull. 2016, 104, 279–289. [Google Scholar] [CrossRef] [PubMed]
- Ichiye, T. Upper ocean boundary-layer flow determined by dye diffusion. Phys. Fluids 1967, 10, 270–279. [Google Scholar] [CrossRef]
- Eames, I. Settling of particles beneath water waves. J. Phys. Oceanogr. 2008, 38, 2846–2853. [Google Scholar] [CrossRef]
- Santamaria, F.; Boffetta, G.; Afonso, M.; Mazzino, A.; Onorato, M.; Pugliese, D. Stokes drift for inertial particles transported by water waves. EPL 2013, 102, 1023–1055. [Google Scholar] [CrossRef]
- Bakhoday-Paskyabi, M. Particle motions beneath irrotational water waves. Ocean Dyn. 2015, 65, 1063–1078. [Google Scholar] [CrossRef]
- Visser, A.W. Using random walk models to simulate the vertical distribution of particles in a turbulent water column. Mar. Ecol. Prog. Ser. 1997, 158, 275–281. [Google Scholar] [CrossRef] [Green Version]
- Dimou, K. 3-D Hybrid Eulerian-Lagrangian/Particle Tracking Model for Simulating Mass Transport in Coastal Water Bodies; Department of Civil and Environmental Engineering, Massachusetts Institute of Technology: Cambridge, MA, USA, 1992. [Google Scholar]
- Gouesbet, G.; Berlemont, A. Eulerian and lagrangian approaches for predicting the behaviour of discrete particles in turbulent flows. Prog. Energy Combust. Sci. 1999, 25, 133–159. [Google Scholar] [CrossRef]
- Ermak, D.; Nasstrom, J. A lagrangian stochastic diffusion method for inhomogeneous turbulence. Atmos. Environ. 2000, 34, 1059–1068. [Google Scholar] [CrossRef]
- Hunter, J.; Craig, P.; Phillips, H. On the use of random walk models with spatially variable diffusivity. J. Comput. Phys. 1993, 106, 366–376. [Google Scholar] [CrossRef]
- Thorpe, S.A. Langmuir circulation. Annu. Rev. Fluid Mech. 2004, 36, 55–79. [Google Scholar] [CrossRef]
- ANSYS. Fluent 12.0 User’s Guide; ANSYS, Inc.: Canonsburg, PA, USA, 2009. [Google Scholar]
- Zhang, B.; He, P.; Zhu, C. Modeling on Hydrodynamic Coupled FCC Reaction in Gas-Solid Riser Reactor. In Proceedings of the ASME 2014 4th Joint US-European Fluids Engineering Division Summer Meeting Collocated with the ASME 2014 12th International Conference on Nanochannels, Microchannels, and Minichannels, Chicago, IL, USA, 3–7 August 2014; p. V01DT32A005. [Google Scholar]
- Gao, F.; Zhao, L.; Boufadel, M.C.; King, T.; Robinson, B.; Conmy, R.; Miller, R. Hydrodynamics of oil jets without and with dispersant: Experimental and numerical characterization. Appl. Ocean Res. 2017, 68, 77–90. [Google Scholar] [CrossRef]
- Geng, X.; Boufadel, M.C.; Cui, F. Numerical modeling of subsurface release and fate of benzene and toluene in coastal aquifers subjected to tides. J. Hydrol. 2017, 551, 793–803. [Google Scholar] [CrossRef]
- Dean, R.; Dalrympl, R. Water Wave Mechanics for Engineers and Scientists; World Scientific: Singapore, 1991. [Google Scholar]
- Pope, S. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Chen, Y.S.; Kim, S.W. Computations of Turbulent flows Using an Extended k-ε Turbulence Closure Model; Report NASA CR-179204; NASA: Greenbelt, MD, USA, 1987.
- Yakhot, V.; Orszag, S.; Thangam, S.; Gatski, T.; Speziale, C. Development of turbulence models for shear flows by a double expansion technique. Phys. Fluids 1992, 4, 1510–1520. [Google Scholar] [CrossRef]
- Gardiner, A. Handbook of Stochastic Methods: For Physics, Chemistry, and the Natural Sciences; Springer Series in Synergetics; Springer: New York, NY, USA, 1990. [Google Scholar]
- Clift, R.; Grace, J.; Weber, M. Bubbles, Drops and Particles; Academic Press: New York, NY, USA, 1978. [Google Scholar]
- Zhao, L.; Boufadel, M.; Adams, E.; Socolofsky, S.; King, T.; Lee, K.; Nedwed, T. Simulation of scenarios of oil droplet formation from the deepwater horizon blowout. Mar. Pollut. Bull. 2015, 101, 93–106. [Google Scholar] [CrossRef] [PubMed]
- Wilcox, A. Reassessment of the scale determining equation for advanced turbulence models. AIAA J. 1988, 26, 1299–1310. [Google Scholar] [CrossRef]
- Lai, A.C.K.; Nazaroff, W.W. Modeling indoor particle deposition from turbulent flow onto smooth surfaces. J. Aerosol Sci. 2000, 31, 463–476. [Google Scholar] [CrossRef]
- Personna, Y.; King, T.; Boufadel, M.; Zhang, S.; Kustka, A. Assessing weathered endicott oil biodegradation in brackish water. Mar. Pollut. Bull. 2014, 86, 102–110. [Google Scholar] [CrossRef] [PubMed]
- Laccarino, G.; Ooi, A.; Durbin, P.; Behnia, M. Reynolds averaged simulation of unsteady separated flow. Int. J. Heat Fluid Flow 2003, 24, 147–156. [Google Scholar] [CrossRef]
- Geng, X.; Boufadel, M.; Xia, Y.; Li, H.; Zhao, L.; Jackson, N.; Miller, R.S. Numerical study of wave effects on groundwater flow and solute transport in a laboratory beach. J. Contam. Hydrol. 2014, 165, 37–52. [Google Scholar] [CrossRef] [PubMed]
- Geng, X.; Boufadel, M.C. Numerical study of solute transport in shallow beach aquifers subjected to waves and tides. J. Geophys. Res. 2015, 120, 1409–1428. [Google Scholar] [CrossRef]
- Zhao, L.; Gao, F.; Boufadel, M.C.; King, T.; Robinson, B.; Lee, K.; Conmy, R. Oil jet with dispersant: Macro-scale hydrodynamics and tip streaming. AIChE J. 2017, 63, 5222–5234. [Google Scholar] [CrossRef]
- Gao, F.; Zhao, L.; Shaffer, F.; Golshan, R.; Boufadel, M.; King, T.; Robinson, B.; Lee, K. Prediction of oil droplet movement and size distribution: Lagrangian method and VDROP-J model. Int. Oil Spill Conf. Proc. 2017, 2017, 1194–1211. [Google Scholar] [CrossRef]
- McPhee, M.G.; Smith, J.D. Measurements of the turbulent boundary layer under pack ice. J. Phys. Oceanogr. 1976, 6, 696–711. [Google Scholar] [CrossRef]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Golshan, R.; Boufadel, M.C.; Rodriguez, V.A.; Geng, X.; Gao, F.; King, T.; Robinson, B.; Tejada-Martínez, A.E. Oil Droplet Transport under Non-Breaking Waves: An Eulerian RANS Approach Combined with a Lagrangian Particle Dispersion Model. J. Mar. Sci. Eng. 2018, 6, 7. https://doi.org/10.3390/jmse6010007
Golshan R, Boufadel MC, Rodriguez VA, Geng X, Gao F, King T, Robinson B, Tejada-Martínez AE. Oil Droplet Transport under Non-Breaking Waves: An Eulerian RANS Approach Combined with a Lagrangian Particle Dispersion Model. Journal of Marine Science and Engineering. 2018; 6(1):7. https://doi.org/10.3390/jmse6010007
Chicago/Turabian StyleGolshan, Roozbeh, Michel C. Boufadel, Victor A. Rodriguez, Xiaolong Geng, Feng Gao, Thomas King, Brian Robinson, and Andrés E. Tejada-Martínez. 2018. "Oil Droplet Transport under Non-Breaking Waves: An Eulerian RANS Approach Combined with a Lagrangian Particle Dispersion Model" Journal of Marine Science and Engineering 6, no. 1: 7. https://doi.org/10.3390/jmse6010007