
An Improved Particle Swarm Optimization-Based Feed-Forward Neural Network Combined with RFID Sensors to Indoor Localization

Abstract
:1. Introduction
2. Literature Review
2.1. Localization Techniques
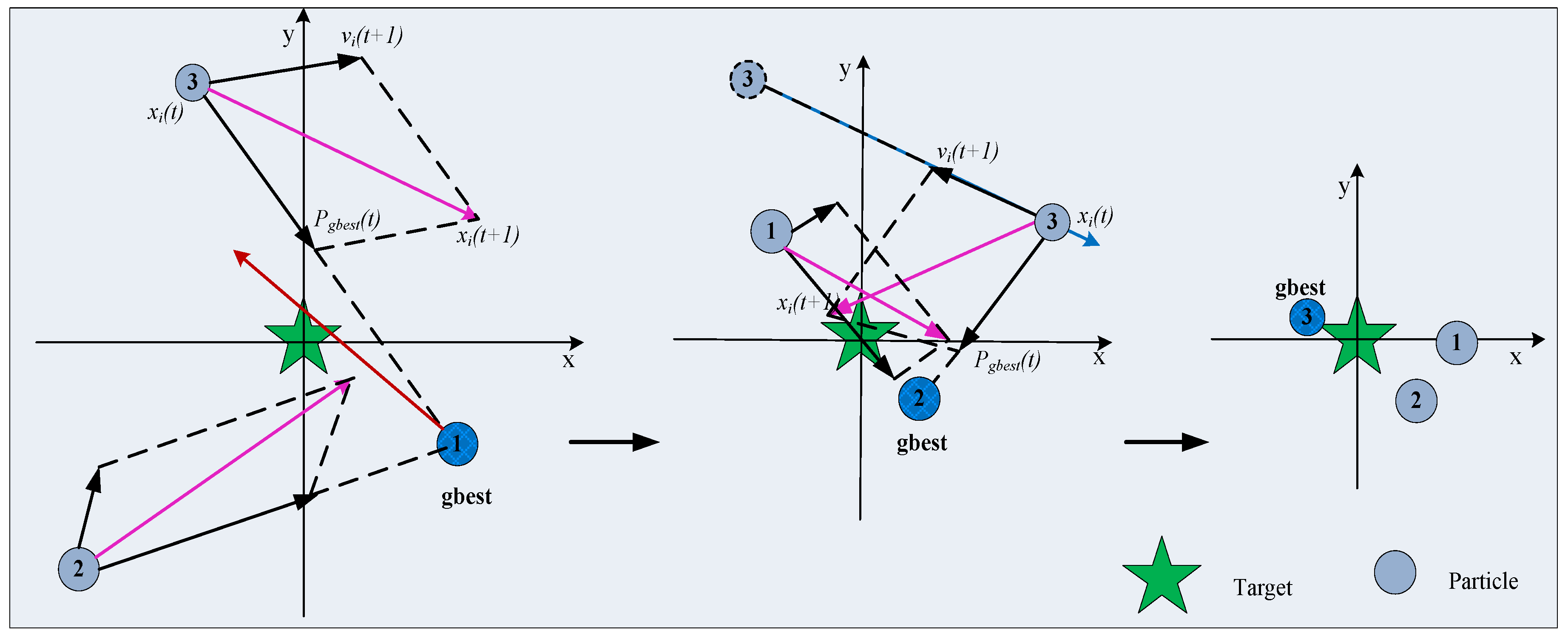
2.2. Particle Swarm Optimization
2.3. Applications of Soft Computing Techniques to Indoor Positioning System
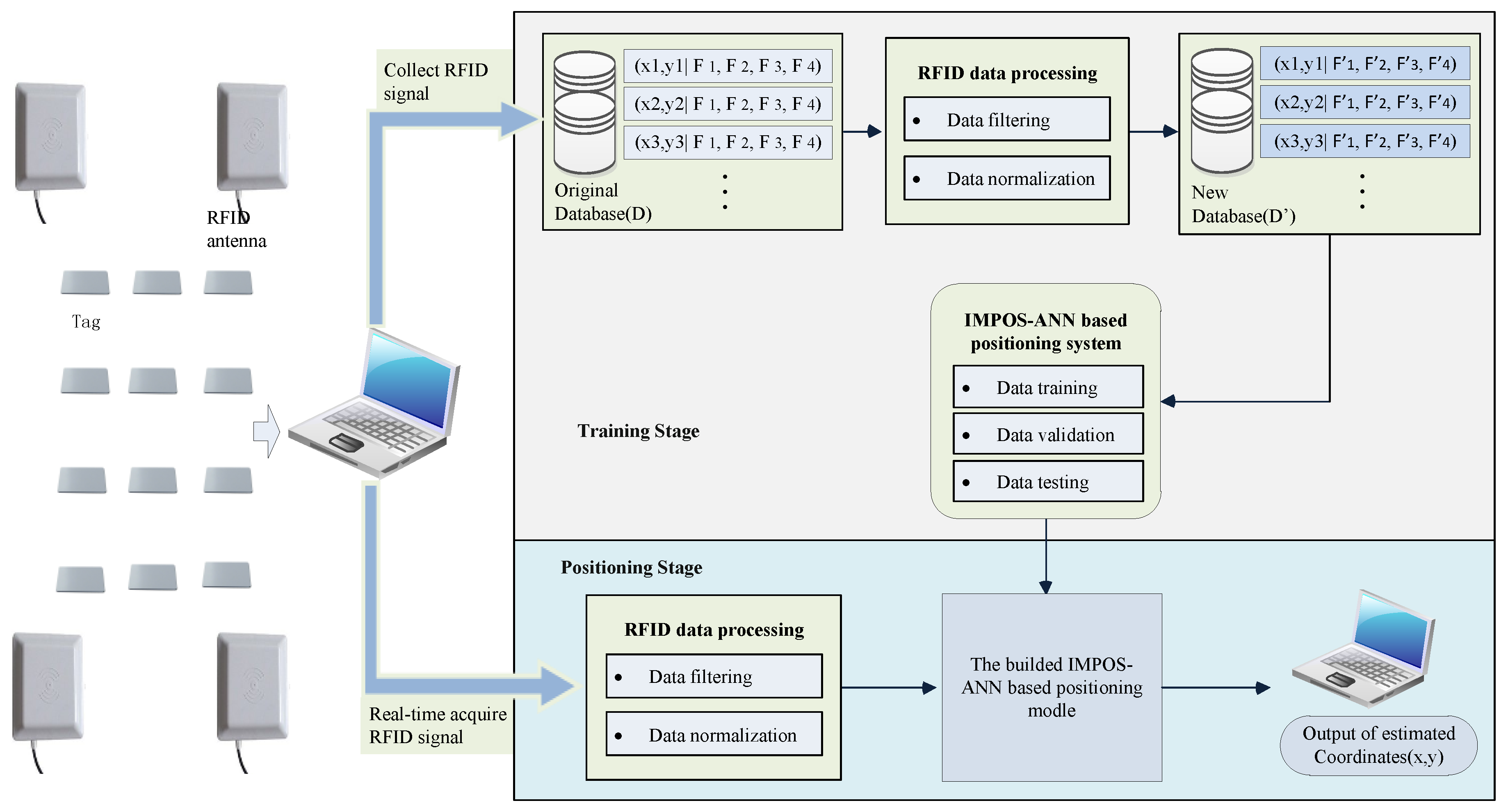
3. The Proposed IMPSO-FNN Method-Based Positioning System
3.1. Location Prediction Model Based on PSO-FNN
3.2. The Main Idea and Parameter Setting of the IMPSO-FNN Algorithm
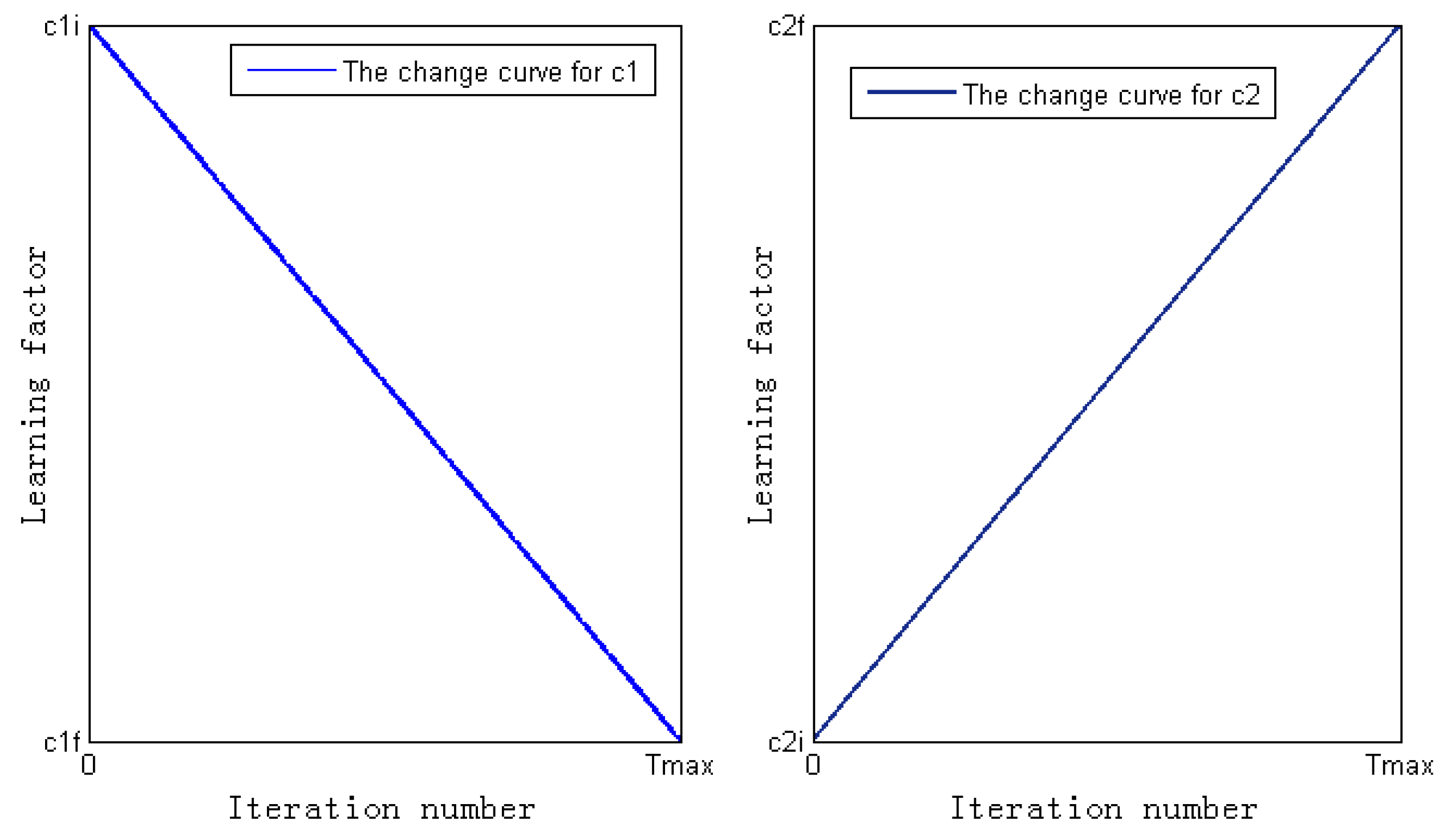
3.2.1. The Learning Factor of Asynchronous Change Strategy
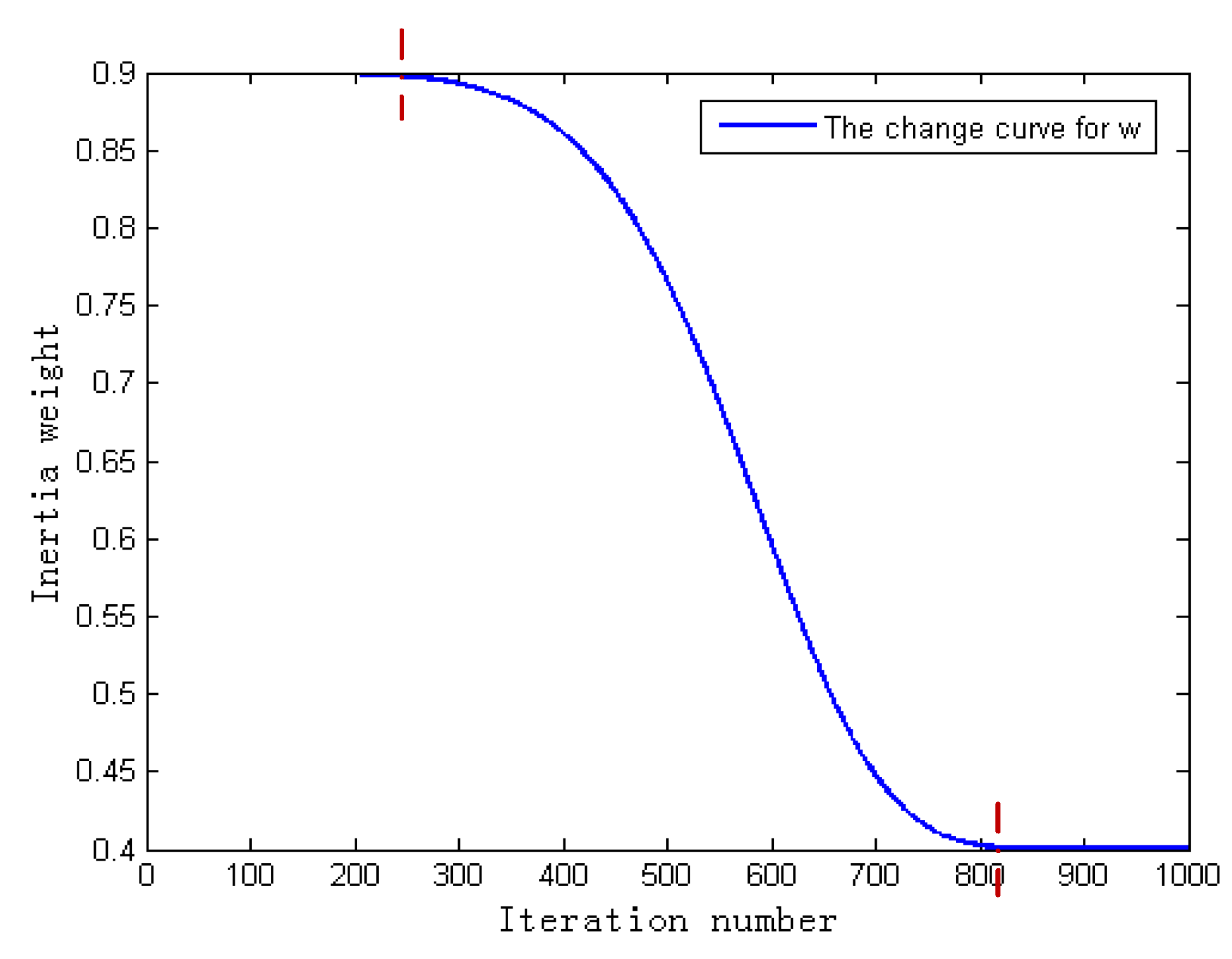
3.2.2. The Nonlinear Inertia Weight Parameters
3.2.3. Maximum Velocity
3.2.4. Data Collection
| Algorithm 1. IMPSO-ANN algorithm of the proposed method. |
| %% Input: The RSSI values between the reference tags and the antennas of reader; the coordinates of reference tags %% |
| %% Output: The locations of the positioning tags %% |
| begin |
| for do %% is each particle |
| , ; %% and are the velocity and position of th particle respectively |
| if then %% is the best position of th particle |
| ; |
| end if |
| end for |
| opti %% obtain the optimum solution |
| while not stop |
| for do |
| , ; |
| , ; |
| if then ; |
| end if |
| if then ; |
| end if |
| end for |
| end while |
| end begin |
3.2.5. RFID Data Preprocessing
4. Simulation Results and Analysis
4.1. Performance Analysis
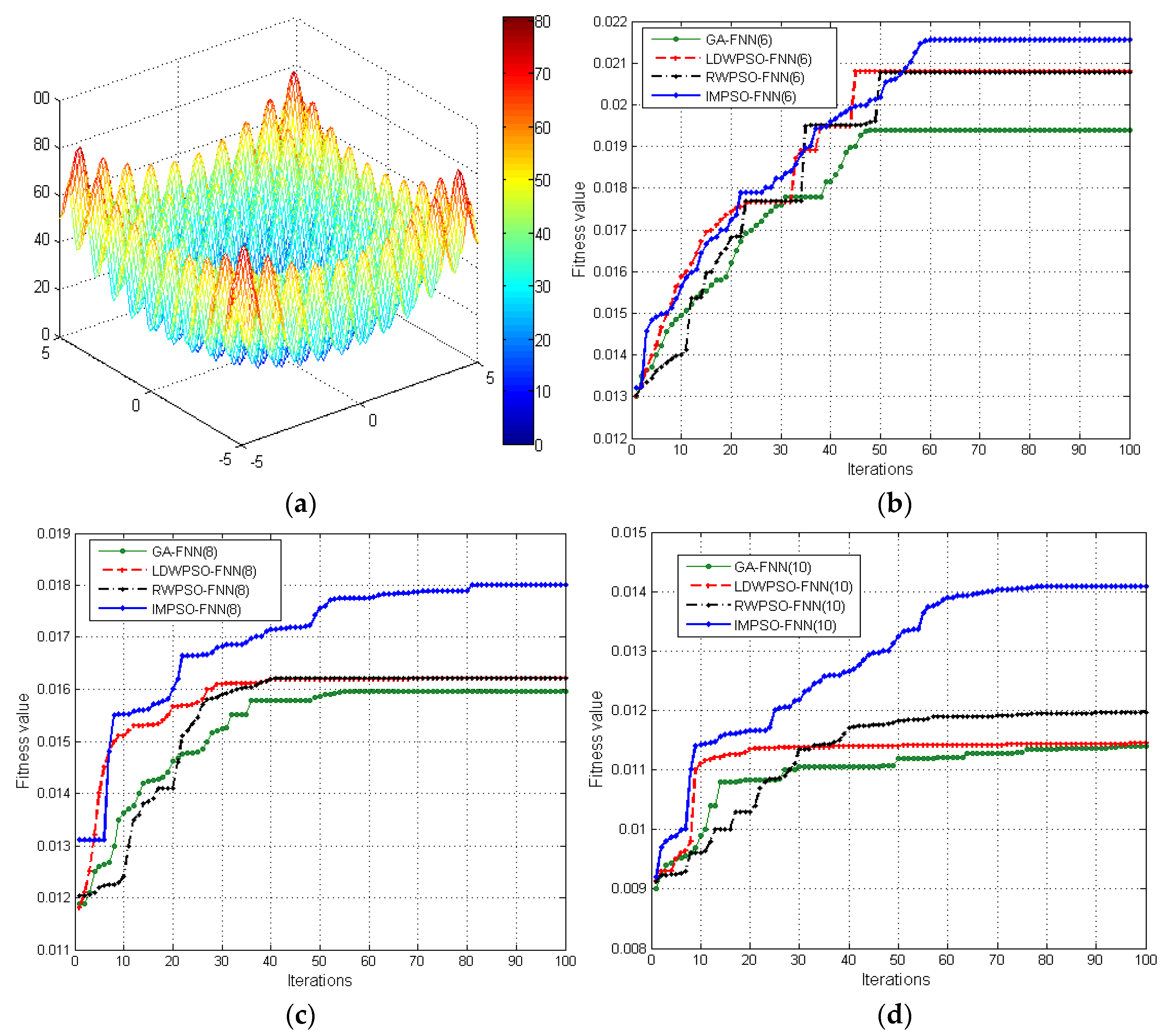
4.2. Performance Test
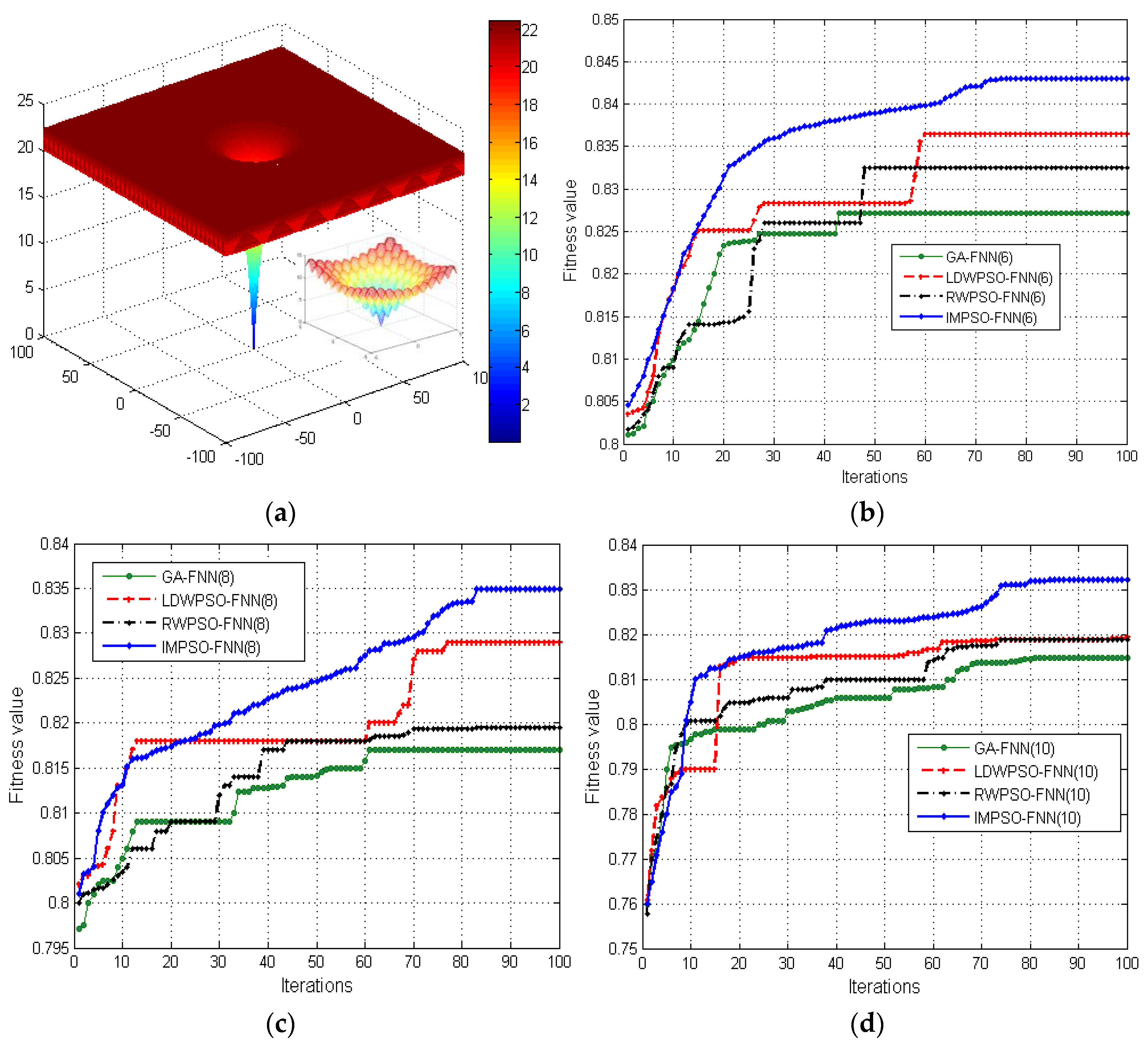
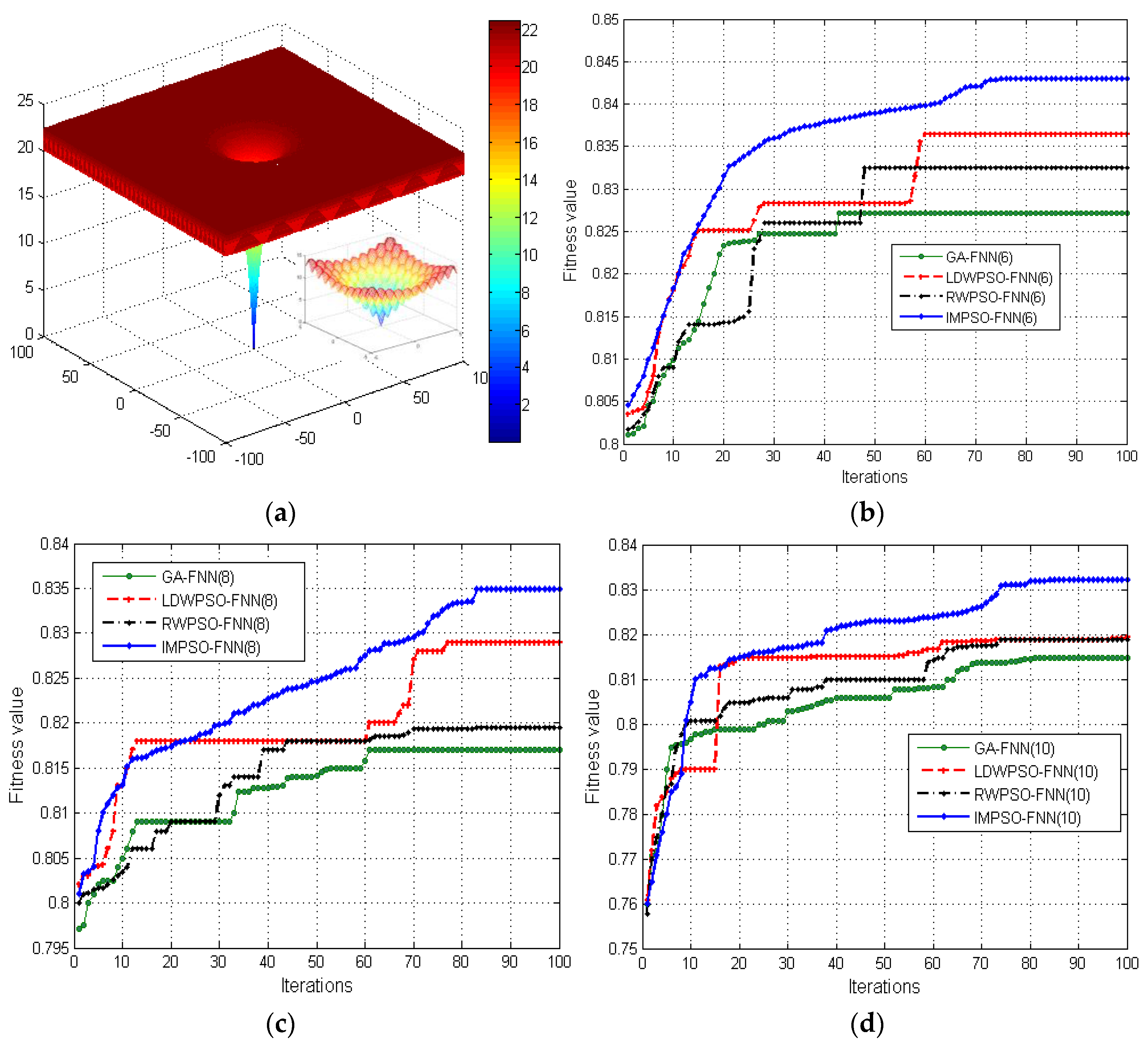
Case 1: Ackley function
- (1)
- Definition:
- (2)
- Search domain: , ;
- (3)
- Number of local minima: Some
- (4)
- The global minima: , f
Case 2: Rastrigrin function
- (1)
- Definition:
- (2)
- Search domain: , ;
- (3)
- Number of local minima: Some
- (4)
- The global minima: , f
5. Case Study
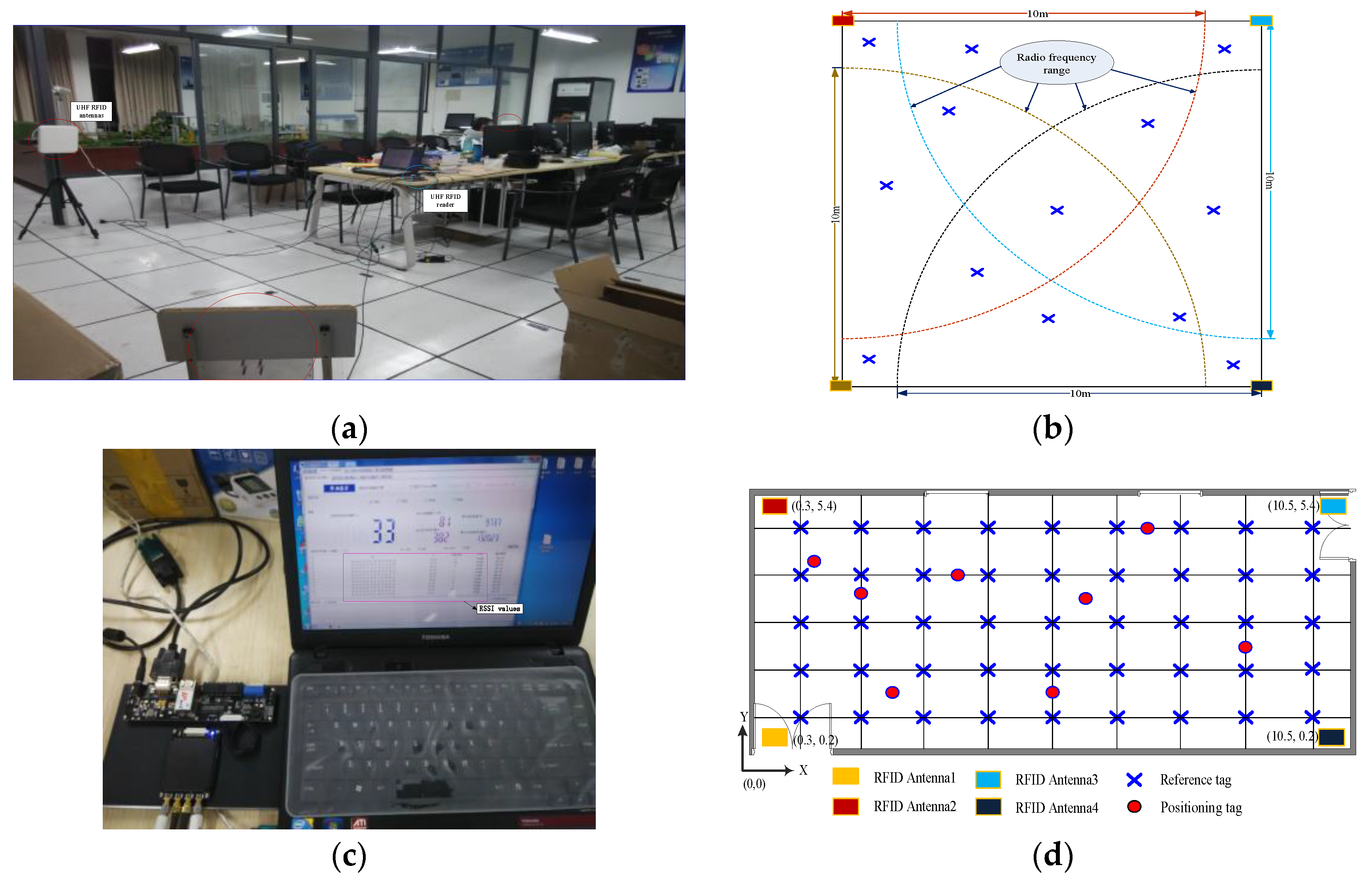
5.1. Experimental Scenario
5.2. Performance Results
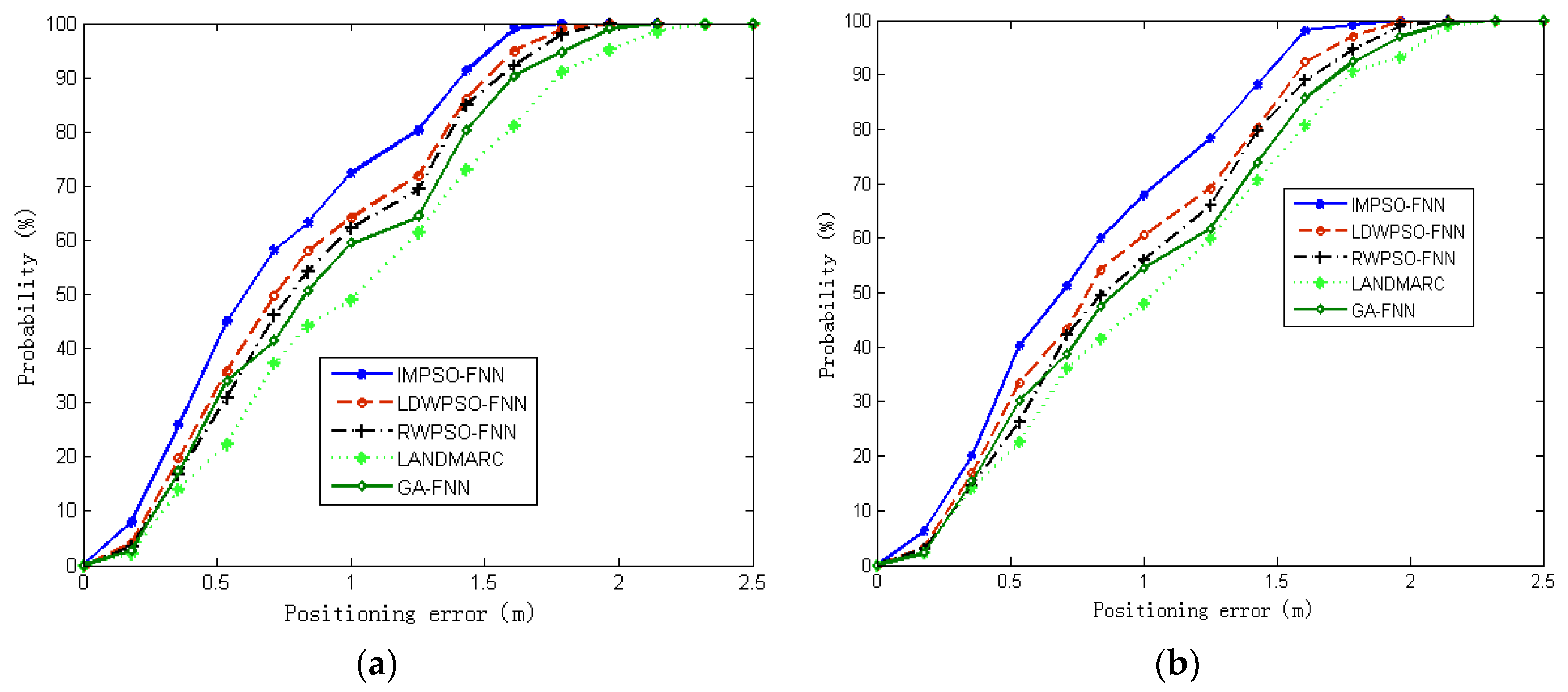
5.3. Comparison with Other Algorithms
5.4. Analysis and Discussion
6. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Caldas, C.; Grau, D.; Haas, C. Using global positioning systems to improve materials locating processes on industrial projects. J. Constr. Eng. Manag. 2006, 132, 741–749. [Google Scholar] [CrossRef]
- Song, J.; Haas, C.; Caldas, C.; Ergen, E.; Akinci, B. Automating the task of tracking the delivery and receipt of fabricated pipe spools in industrial projects. J. Constr. Eng. Manag. 2006, 15, 166–177. [Google Scholar] [CrossRef]
- Woo, S.; Jeong, S.; Mok, E.; Xia, L.; Choi, C.; Pyeon, M.; Heo, J. Application of WiFi-Based indoor positioning system for labor tracking at construction sites: A case study in Guangzhou MTR. J. Autom. Constr. 2011, 20, 3–13. [Google Scholar] [CrossRef]
- Aryan, A. Evaluation of Ultra-Wideband Sensing Technology for Position Location in Indoor Construction Environments. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2011. [Google Scholar]
- Diggelen, F.V. Indoor GPS theory and implementation. In Proceedings of the IEEE Position Location and Navigation Symposium, Piscataway, NJ, USA, 15–18 April 2002; pp. 240–247.
- Want, R.; Hopper, A.; Falcao, V.; Gibbons, J. The active badge location system. ACM Trans. Inform. Syst. 1992, 40, 91–102. [Google Scholar] [CrossRef]
- Domdouzis, K.; Kumar, B.; Anumba, C. Radio-Frequency Identification (RFID) applications: A brief introduction. Adv. Eng. Inform. 2007, 21, 350–355. [Google Scholar] [CrossRef]
- Chae, S.; Yoshida, T. Application of RFID Technology to prevention of collision accident with heavy equipment. J. Autom. Constr. 2010, 19, 368–374. [Google Scholar] [CrossRef]
- Ranky, P.G. An introduction to radio frequency identification (RFID) methods and solutions. Assem. Autom. 2006, 26, 28–33. [Google Scholar] [CrossRef]
- Li, N.; Becerik-Gerber, B. Performance-Based evaluation of RFID-Based indoor location sensing solutions for the built environment. Adv. Eng. Inform. 2011, 25, 535–546. [Google Scholar] [CrossRef]
- Choi, J.S. Accurate and Cost Efficient Object Localization Using Passive UHF RFID. Ph.D. Thesis, Faculty of the Graduate School, University of Texas, Arlington, TX, USA, 2011. [Google Scholar]
- Wang, Z.Q.; Ye, N.; Malekian, R.; Xiao, F.; Wang, R. TrackT: Accurate tracking of RFID tags with mm-level accuracy using first-order taylor series approximation. Ad Hoc Netw. 2016, 53, 132–144. [Google Scholar] [CrossRef]
- Wang, Z.Q.; Ye, N.; Malekian, R.; Wang, R.; Li, P. TMicroscope: Behavior Perception Based on the Slightest RFID Tag Motion. Elektron. Ir Elektrotech. 2016, 22, 114–122. [Google Scholar] [CrossRef]
- Gong, Y.J.; Shen, M.; Zhang, J.; Kaynak, O. Optimizing RFID network planning by using a particle swarm optimization algorithm with redundant reader elimination. IEEE Trans. Ind. Inform. 2012, 8, 900–912. [Google Scholar] [CrossRef]
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T. Range-free localization schemes for large scale sensor networks. In Proceedings of the 9th Annual International Conference on Mobile Computing and Networking, San Diego, CA, USA, 14–19 September 2003; pp. 81–95.
- Hightower, J.; Borriello, G. Location systems for ubiquitous computing. Computer 2001, 34, 57–66. [Google Scholar] [CrossRef]
- Guo, Z.; Guo, Y.; Hong, F.; Jin, Z.; He, Y.; Feng, Y.; Liu, Y. Perpendicular intersection: Locating wireless sensors with mobile beacon. IEEE Trans. Veh. Technol. 2010, 59, 3501–3509. [Google Scholar] [CrossRef]
- Wang, G.; Yang, K. A new approach to sensor node localization using RSS measurements in wireless sensor networks. IEEE Trans. Wirel. Commun. 2011, 10, 1389–1395. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence, Piscataway, NJ, USA, 4–9 May 1998; pp. 69–73.
- Cui, Z.H.; Cai, X.J.; Shi, Z.Z. Using fitness landscape to improve the performance of particle swarm optimization. J. Comput. Theor. Nanosci. 2012, 9, 258–265. [Google Scholar] [CrossRef]
- Li, Z.J.; Xiao, H.Z.; Yang, C.G.; Zhao, Y. Model Predictive Control of Nonholonomic Chained Systems Using General Projection Neural Networks Optimization. IEEE Trans. Syst. Man Cybern. Syst. 2015, 45, 1313–1321. [Google Scholar] [CrossRef]
- Li, J.B.; Chung, Y.K. A novel back-propagation neural network training algorithm designed by an ant colony optimization. In Proceedings of the IEEE/PES Transmission and Distribution Conference and Exhibition: Asia and Pacific, Brussels, Belgium, 10–12 September 2005; pp. 1–5.
- Lin, S.W.; Tseng, T.Y.; Chou, S.Y.; Chen, S.C. A simulated annealing-based approach for simultaneous parameter optimization and feature selection of back-propagation networks. Expert Syst. Appl. 2008, 34, 1491–1499. [Google Scholar] [CrossRef]
- Ceravolo, F.; Felice, M.D.; Pizzuti, S. Combining back propagation and genetic algorithms to train neural networks for ambient temperature modeling in Italy. In Applications of Evolutionary Computing; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5484, pp. 123–131. [Google Scholar]
- Kuo, R.J.; Horng, S.Y.; Huang, Y.C. Integration of particle swarm optimization-based fuzzy neural network and artificial neural network for supplier selection. Appl. Math. Model. 2010, 34, 3976–3990. [Google Scholar] [CrossRef]
- Wang, C.Z.; Wu, F.; Shi, Z.C.; Zhang, D.S. Indoor positioning technique by combining RFID and particle swarm optimization-based back propagation neural network. Opt. Int. J. Light Electron Opt. 2016, 127, 6839–6849. [Google Scholar] [CrossRef]
- Tao, M.; Huang, S.Q.; Li, Y.; Yan, M.; Zhou, Y.Y. SA-PSO based optimizing reader deployment in large-scale RFID Systems. J. Netw. Comput. Appl. 2015, 52, 90–100. [Google Scholar] [CrossRef]
- Huang, Y.J.; Chen, C.Y.; Hong, B.W.; Kuo, T.C.; Yu, H.H. Fuzzy neural network based RFID indoor location sensing technique. In Proceedings of the IEEE 2010 International Joint Conference on Neural Networks (IJCNN), Barcelona, Spain, 18–23 July 2010; pp. 1–5.
- Miao, K.; Chen, Y.; Miao, X. An indoor positioning technology based on GA-BP Neural Network. In Proceedings of the 6th IEEE International Conference on Computer Science & Education (ICCSE), Singapore, 3–5 August 2011; pp. 305–309.
- Sá, A.O.; Nedjah, N.; Mourelle, L.M. Genetic and backtracking search optimization algorithms applied to localization problems. Comput. Sci. Appl. 2014, 8583, 738–746. [Google Scholar]
- Lin, C.J.; Liu, Y.C.; Lee, C.Y. An efficient neural fuzzy network based on immune particle swarm optimization for prediction and control applications. Int. J. Innov. Comput. Inform. Control 2008, 4, 1711–1722. [Google Scholar]
- Jin, X.J.; Shao, J.; Zhang, X.; An, W.; Malekian, R. Modeling of nonlinear system based on deep learning framework. Nonlinear Dyn. 2016, 84, 1327–1340. [Google Scholar] [CrossRef]
- Li, Z.J.; Yang, C.G.; Zhang, L.X.; Zhang, L.; Yuan, P.; Ding, L.; Wang, T. Robust Stabilization of a Wheeled Mobile Robot Using Model Predictive Control Based on Neuro-dynamics Optimization. IEEE Trans. Ind. Electron. 2016, 64, 505–516. [Google Scholar]
- Liu, J.H. The Basic Theory and Improvement of Particle Swarm Optimization; Central South University: Changsha, China, 2010. [Google Scholar]
- Chatterjee, A.; Siarry, P. Nonlinear inertia weight variation for dynamic adaptation in particle swarm optimization. Comput. Oper. Res. 2006, 33, 859–871. [Google Scholar] [CrossRef]
- Eberhart, R.C.; Shi, Y. Tracking and optimizing dynamic systems with particle swarms. In Proceedings of the IEEE Congress on Evolutionary Computation, San Francisco, CA, USA, 27–30 May 2001; pp. 94–100.
- Wang, H.G.; Pei, C.X.; Zheng, F. Performance analysis and test for passive RFID system at UHF band. J. China Univ. Posts Telecommu. 2009, 16, 49–56. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | GA-FNN | Improved PSO-FNN | LDWPSO-FNN | RWPSO-FNN |
|---|---|---|---|---|
| Inertia weight | — | rand | ||
| Number of iterations () | 100 | 100 | 100 | 100 |
| The population size | 50 | 50 | 50 | 50 |
| learning factor | — | where | ||
| Range of velocity and position | — | [−1, 1] | [−1, 1] | [−1, 1] |
| Crossover rate | 0.75 | — | — | — |
| Mutation rate | 0.01 | — | — | — |
| Dimension | Algorithm | GA-FNN | LDWPSO-FNN | RWPSO-FNN | IMPSO-FNN |
|---|---|---|---|---|---|
| 6 | AE | 0.16002 | 0.14871 | 0.15813 | 0.14016 |
| ARE | 0.007158 | 0.006632 | 0.007014 | 0.006486 | |
| 8 | AE | 0.16946 | 0.16704 | 0.16733 | 0.16663 |
| ARE | 0.007913 | 0.007683 | 0.007828 | 0.007630 | |
| 10 | AE | 0.18013 | 0.17308 | 0.17887 | 0.16858 |
| ARE | 0.008422 | 0.007965 | 0.008311 | 0.007806 |
| Dimension | Algorithm | GA-FNN | LDWPSO-FNN | RWPSO-FNN | IMPSO-FNN |
|---|---|---|---|---|---|
| 6 | AE | 0.51563 | 0.47835 | 0.48014 | 0.33861 |
| ARE | 0.182461 | 0.166731 | 0.167742 | 0.110384 | |
| 8 | AE | 0.53723 | 0.51376 | 0.52144 | 0.48034 |
| ARE | 0.198683 | 0.189171 | 0.192887 | 0.129792 | |
| 10 | AE | 0.72858 | 0.72054 | 0.71163 | 0.56976 |
| ARE | 0.268981 | 0.265975 | 0.180892 | 0.173195 |
| Dimension | Algorithm | GA-FNN | LDWPSO-FNN | RWPSO-FNN | IMPSO-FNN |
|---|---|---|---|---|---|
| 4 | MAE | 0.10348 | 0.052186 | 0.090634 | 0.042622 |
| ARE | 0.004108 | 0.003338 | 0.003913 | 0.002701 | |
| RMSE | 0.28471 | 0.25865 | 0.28103 | 0.24416 | |
| 6 | MAE | 0.12986 | 0.055563 | 0.104191 | 0.051143 |
| ARE | 0.004983 | 0.003665 | 0.004138 | 0.003612 | |
| RMSE | 0.32517 | 0.28561 | 0.30837 | 0.25326 |
| Dimension | Test Sample | GA-FNN | LANDMARC | RWPSO-FNN | LDWPSO-FNN | IMPSO-FNN |
|---|---|---|---|---|---|---|
| 4 | 50% | 0.838 | 1.116 | 0.801 | 0.728 | 0.532 |
| 70% | 1.305 | 1.411 | 1.260 | 1.221 | 0.986 | |
| 90% | 1.602 | 1.756 | 1.571 | 1.503 | 1.412 | |
| MAE | 1.168 | 1.504 | 1. 006 | 0.898 | 0.687 | |
| 6 | 50% | 0.887 | 0.917 | 0.846 | 0.787 | 0.702 |
| 70% | 1.371 | 1.417 | 1.293 | 1.272 | 1.085 | |
| 90% | 1.748 | 1.772 | 1.673 | 1.584 | 1.436 | |
| MAE | 1.201 | 1.506 | 0.986 | 0.924 | 0.726 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Shi, Z.; Wu, F. An Improved Particle Swarm Optimization-Based Feed-Forward Neural Network Combined with RFID Sensors to Indoor Localization. Information 2017, 8, 9. https://doi.org/10.3390/info8010009
Wang C, Shi Z, Wu F. An Improved Particle Swarm Optimization-Based Feed-Forward Neural Network Combined with RFID Sensors to Indoor Localization. Information. 2017; 8(1):9. https://doi.org/10.3390/info8010009
Chicago/Turabian StyleWang, Changzhi, Zhicai Shi, and Fei Wu. 2017. "An Improved Particle Swarm Optimization-Based Feed-Forward Neural Network Combined with RFID Sensors to Indoor Localization" Information 8, no. 1: 9. https://doi.org/10.3390/info8010009