An Adaptive Traffic Signal Control in a Connected Vehicle Environment: A Systematic Review

School of Automotive and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China
*
Author to whom correspondence should be addressed.
Information 2017, 8(3), 101; https://doi.org/10.3390/info8030101
Submission received: 4 August 2017
/
Revised: 22 August 2017
/
Accepted: 22 August 2017
/
Published: 24 August 2017
(This article belongs to the Special Issue Intelligent Transportation Systems)
Abstract
:In the last few years, traffic congestion has become a growing concern due to increasing vehicle ownerships in urban areas. Intersections are one of the major bottlenecks that contribute to urban traffic congestion. Traditional traffic signal control systems cannot adjust the timing pattern depending on road traffic demand. This results in excessive delays for road users. Adaptive traffic signal control in a connected vehicle environment has shown a powerful ability to effectively alleviate urban traffic congestions to achieve desirable objectives (e.g., delay minimization). Connected vehicle technology, as an emerging technology, is a mobile data platform that enables the real-time data exchange among vehicles and between vehicles and infrastructure. Although several reviews about traffic signal control or connected vehicles have been written, a systemic review of adaptive traffic signal control in a connected vehicle environment has not been made. Twenty-six eligible studies searched from six databases constitute the review. A quality evaluation was established based on previous research instruments and applied to the current review. The purpose of this paper is to critically review the existing methods of adaptive traffic signal control in a connected vehicle environment and to compare the advantages or disadvantages of those methods. Further, a systematic framework on connected vehicle based adaptive traffic signal control is summarized to support the future research. Future research is needed to develop more efficient and generic adaptive traffic signal control methods in a connected vehicle environment.
1. Introduction
Recent years have witnessed a tremendous increase in car ownership in urban areas. This has result in increasing travel time, traffic congestion, gas emissions, and fuel consumption [1,2,3]. It is estimated that delays at traffic signals contribute a 5 to 10 percent of all traffic delays, or 295 million vehicle-hours of delays, on major roadways alone in the USA [4]. Moreover, the current road and affiliated infrastructure design and operation in cities are inadequate to meet the rising demands of the traffic [5]. Traffic signal control systems play an important role in optimizing the flow of traffic and are the primary means for implementing Smart Roads principles within Network Operating Plans (NOPs) [6]. In order to improve the efficiency of road use and improve the traffic conditions, it is essential to optimize the traffic signal control in accordance with traffic demand.
The traditional signal control strategies have gone through three stages: fixed-time, actuated, and adaptive. Fixed-time signal control utilizes the historical traffic data to determine signal timing. However, in reality, the traffic demand is unpredictable and fluctuates in time [7,8]. The fixed timing parameter settings cannot meet the requirement of rapidly changing traffic conditions. Actuated signal control, which is usually applied for isolated intersection, collects real-time traffic data through infrastructure-based sensors, e.g., loop detectors, video detectors, infrared, or radar, then cycle length, phase splits, and even phase sequence react to current traffic demand. However, actuated signal controllers change these timings based on a set of pre-defined, static parameters such as unit extension time, minimum, and maximum green time [9,10]. Adaptive traffic signal control strategy, which is applied for an arterial or road network, employs upstream detector data to estimate incoming traffic flow and seeks an optimal timing strategy to maximize or minimize an objective function. Several current adaptive signal control systems include SCATS [11], OPAC [12], SCOOT [13], RHODES [14], PRODYN [15], and MOTION [16]. However, there are two limitations to actuated and adaptive signal control. First, those detectors only provide instantaneous vehicle information data when a vehicle is passing over the detector and cannot measure the vehicle states (such as, position, heading, speed, and acceleration). Second, the installation and maintenance cost of the fixed sensors is considered high. If one or more loop detectors are not operating, the performance of the adaptive signal control system might be notably degraded [17].
As early as 2004, Huang and Miller [18] proposed the conception of a smart intersection making use of wireless communication. A simple and reliable protocol for electronic traffic signaling systems was presented to construct a sample application: a red-light alert system. Although the system was not tested at the field intersection, this work provides the motivation to explore the area of wireless technologies for adaptive traffic control systems. Connected vehicle (CV), as an emerging technology, can communicate with each other (V2V) and with the infrastructure (V2I) through dedicated short-range communications (DSRC). Connected vehicle combines several emerging technological advances, such as advanced wireless communications, on-board computer processing, advanced vehicle sensors, GPS navigation, and smart infrastructure to provide a networked environment. Compared to the traditional detectors, CV technology can provide real-time information (such as, position, speed, acceleration, and other traffic data) necessary for evaluating traffic conditions on a road network. Connected vehicle technology has the potential to reduce travel time by 37%, reduce emissions by 30% and improve safety indicators by 45% [1]. As a component of mobility, intersection traffic signal control has an important influence on the traffic efficiency. Inspired by such benefits, CV has been attracting increasing attention in traffic signal control. Implementation of adaptive traffic signal control in connected vehicle environment has been affected by employing sensors for capturing traffic information. Communication between vehicle and infrastructure enables the intersection controller to obtain a much more detailed information of the surrounding vehicle states within the transmission range. Further, data from connected vehicles provide real-time vehicle location, speed, acceleration, and other vehicle data. This real-time data is used by the traffic signal controller to make better timing optimization in controlling the traffic signals. Collecting connected vehicle data is significantly less expensive to install and maintain a suite of detectors (e.g., loop, radar or video). If one or more connected vehicles cannot communicate to the infrastructure due to one communication failure or the other, it will only decrease the market penetration rate on a road network and will not have a large impact to the total signal control system performance. If the infrastructure is out of order by chance, the intersection control strategy can restore to the traditional actuated or fixed time signal control quickly [17].
By taking advantage of connected vehicle technology, adaptive traffic signal control can be divided into two main parts. The first part is to obtain traffic information at intersections; the second part is to analyze and evaluate the data acquired from the first part to generate the optimal signal control strategies. Several studies have been implemented on the applications of CVs technology in adaptive traffic signal control. Some papers [17,19] concentrated on phase optimization-based methods to optimize the signal control and some [20,21,22,23] employed queue-based methods to model and achieve the signal control system optimization. Adaptive traffic signal control methods are aimed at either minimizing the average delay per vehicle or decreasing the queue length of vehicles at intersections. However, it should be noted that the most of early studies assumed all or a majority of the vehicles are equipped wireless or connected. Only a few recent works took into consideration the incomplete vehicle status information or unequipped vehicles. Traffic models [17] and statistical methods [24] are used to estimate the arrival status of unequipped vehicles. Although there has been certain positive achievement on models and solutions to research the adaptive traffic signal control in a connected vehicle environment, there are still many questions to be studied. To summarize, connected vehicle-based traffic signal control methods have the following limitations in the surveyed literature: (1) some papers did not estimate the performance of the method under the different penetration rates of equipped vehicle; (2) few papers estimated the status of unequipped vehicles; (3) some proposed methods could only be implemented to an isolated intersection, rather than coordinated intersections. Overall, the purpose of this paper is to review systematically existing adaptive traffic signal control methods in a connected vehicle environment and to objectively compare the advantages or disadvantages of those methods. A framework of adaptive traffic signal control in a connected vehicle environment is summarized based on existing research to support future research. Several recommendations for future research are provided in the end.
The remainder of this paper is organized as follows. Section 2 provides the methods and a review of eligible papers. Section 3 presents the systematic review process. Section 4 describes the quality of the reviewed studies. Limitations and strengths of this paper are proposed in Section 5. The discussions are presented in Section 6. Section 7 provides the conclusions. Finally, the future work is presented in Section 8.
2. Methods
2.1. Search Strategy
On the basis of the PRISMA [25] (preferred reporting items for systematic reviews and meta-analyses) guidelines, six databases were searched in May 2017 for peer-reviewed papers with regard to adaptive traffic signal control in a connected vehicle environment. These included Web of Science, ScienceDirect, Academic Search Complete, SpringerLink, IEEE Xplore, and TRID. The first four of these are comprehensive databases, and the other databases include journals for various disciplines, such as engineering, mathematics, statistics, computer science, and transportation. At least one term from each of the three categories of search terms or keywords must be used to contain: (1) signal control, traffic signal control, adaptive signal control, real-time signal control, intersection control, traffic light; (2) intersection, isolated intersection, signalized intersection; and (3) connected vehicle, Vehicular Ad hoc Networks, VANET, Internet of vehicle, cooperative vehicle, vehicle to vehicle communication, vehicle to infrastructure communication, Intelligent Traffic System, ITS. The item search forms were adjusted to match the specific structure and requirement of each database. Duplicate and irrelevant papers were eliminated and reference lists within selected papers were also researched for further studies.
2.2. Inclusion and Exclusion Criteria
In order to ensure that the papers are in compliance with the subject of the review, all papers must be screened again carefully. Concrete contents are met as follows: (1) be published in a peer-reviewed English journal; (2) related references must be included; (3) must be in a connected vehicle environment (communication between vehicle and vehicle or infrastructure); (4) must be adaptive traffic signal control (rather than other control method); (5) optimizing the intersection traffic signal control.
2.3. Data Extraction
Standardized data extraction table was extracted from the reviewed papers using matrix method of literature review. Information drew from each reviewed paper included literature characteristics (e.g., author, year, country, and journal), methodology (e.g., estimation of unequipped vehicle status, number of objective function, applied range of the method), simulation platform (e.g., simulation software, simulation software property), and simulation and simulation result (e.g., simulation data source, simulation scenario, comparison of simulation results). To ensure the reliability and validity of data extraction, the author chose 8 papers from the selected papers and extracted the data independently. Divergence between the authors about the extracted data was discussed until a consensus was reached. Ultimately, the authors approved of 85% of the extracted data, indicating high reliability and validity.
2.4. Quality Assessment
The quality of the selected papers in this review is systemically assessed through a modified checklist. Papers were assessed on 8 different criteria divided over two factors: the methodology quality and the simulation or simulation result quality.
In order to find out the key factors that influence the quality of methodology, the modified checklist is divided into three aspects: (1) estimation of unequipped vehicle status; (2) number of objective function; and (3) applied range of the method. The estimation of unequipped vehicle status is important to the methodology. This is because the penetration rate of the equipped wireless vehicle will not reach up to 100% during recent years and the unequipped vehicle will have an influence on the intersection traffic signal control efficiency [17,26]. Several various objective functions were taken into consideration when designing a signal control system, such as minimizing the average delay of vehicle [27], minimizing the delay of total vehicle, minimizing the queue length [17] and improving the average speed [24]. The alternatives of objective function will determine the performance of the traffic signal control system. Additionally, in reality, the road intersection is not isolated and the signal control needs to be realized the coordinated control. Some papers only consider an isolated intersection, so the applied range of the method is selected to one of the criteria.
To assess the influences affecting the quality of simulation and simulation result, the modified checklist includes: simulation testing, simulation data source, simulation scenario, penetration rate of the equipped vehicles, and comparison of simulation results. Since the testing process is not only increasingly expensive, but also extremely time consuming. Traffic simulation, as an economical, safe, repeatable, and controllable tool, can model the traffic in a virtual environment to verify the proposed method. The field data source and the field scenario make the simulation results more authentic and reliable. Therefore, it is essential to assess the simulation within the selected papers. Moreover, assessing the performance of traffic signal control system under different penetration rate conforms to the reality of the development of connected vehicle technology. Comparison of simulation results is to show whether the proposed method is the best.
All included studies were evaluated on the basis of the 8 criteria listed in Table 1.
3. Systematic Review Process
The search and retrieval process is shown in Figure 1. The number of papers collected from each database above were 635 (Web of Science), 1672 (ScienceDirect), 903 (Springer Link), 618 (IEEE Xplore), 1365 (TRID), and 29 (Academic Search Complete). After duplicates were removed, a total of 5223 different records were extracted from six databases, of which 357 were identified following the screening of titles and abstracts. There were three reasons for eliminating irrelevant and ineligible papers: not about signal control; not in a connected vehicle environment; and the full text is not available. Thus, the full text of 23 publications was retrieved. The reference lists of excluded reviews were reviewed and potential papers were gathered. Finally, 26 published papers matching all the criteria were included in this review, as shown in Table 2.
3.1. Adaptive Signal Control Methods
In this section, we emphasize the adaptive traffic signal control methods implemented in a connected vehicle environment. Further, these methods are analyzed and compared objectively. As shown in Table 3, these methods can be divided into control methods for isolated intersection and multiple intersections according to the applied scope of the methods.
3.1.1. Control Methods for Isolated Intersection
Gradinescu et al. [28] proposed an adaptive traffic light system based on wireless communication between vehicle and fixed controller nodes. In the system, the timing plan is generated once during each cycle and establishes a plan for the following cycle based on the measured parameters. The first step is to calculate the cycle length using Webster’s formula [29] and adjust it to meet objective function, then the green splits for each phase are allocated to obtain equal degrees of saturation. Two various scenario simulation results show the total average delay, fuel consumption, and pollutant emissions were reduced significantly. However, this paper did not consider the performance of method under various penetration rates.
Feng et al. [17] presented a real-time adaptive signal phase allocation algorithm based on bi-level optimization using connected vehicle data. Dynamic programming (DP) [30] is applied to optimize the phase allocation. In the system, signal phase sequences and durations are assigned based on predicted vehicle arrivals. The algorithm is a bi-level optimization program: at the upper level, DP contains a forward and a backward recursion. The forward recursion calculates the optimal phase duration and value of the optimal function. The backward recursion retrieves the optimal signal policy starting from the final stage working backwards; at the lower level, optimization is formulated in two objective functions: minimizing the total vehicle delay and minimizing the queue length. To solve the optimization problem, the combinations of the phase duration and sequences are enumerated to minimize delay combination. Another research highlight of the paper is the Estimation of Location and Speed (EVLS) algorithm. An innovative EVLS algorithm is proposed to estimate unequipped vehicle status. The road section near an intersection is divided into three regions: queuing region, slow-down region, and free-flow region. Different algorithms are employed to estimate the location and speed of each unequipped vehicle in each region. The simulation results show that the proposed algorithm reduces the total delay significantly under high penetration rates and is comparable to actuated control under low penetration rates.
Compared with the dynamic programming algorithm, the approximate dynamic programming [31] adopts the combination of off-line and on-line training, which can respond to the change of system parameters in real time and enhance the robustness of the system. Cai et al. [32] presented a method consisting of travel-time estimation and adaptive traffic signal control under V2I environment. The proposed method is based on approximate dynamic programming (ADP), which allows the traffic controller to learn from its own performance progressively. In the method, the remaining travel time will be predicted when a vehicle approaches the stop line at an intersection. The approximation techniques can mitigate the difficulties of solving the dynamic programming to optimize the control performance. Based on function approximation which is one of the common methods for ADP, they design a continuous function to replace the exact one. Compared to the benchmarking control method, the numerical experiment shows that the reduction in the total travel time and vehicle stops is notable under various simulation scenarios.
Similar to the above method based on travel time, Lee et al. [24] presented a cumulative travel-time responsive (CTR) real-time intersection control algorithm with connected vehicle data to minimize the cumulative travel time of vehicles. The cumulative travel time is defined as the elapsed time from when the vehicle entered the approaching link to the current position of the vehicle. To supplement the travel-time data obtained at less than 100% market penetration, a stochastic state estimation utilizing Kalman Filter is used in estimating cumulative travel time. The algorithm calculates the travel time for the combination of vehicle movements for each phase (i.e., NEMA phases 2 & 6, or 4 & 8). The phasing with the highest combined travel time is selected as the next green phase, and a minimum green time is five seconds. The algorithm is tested on an isolated intersection model, and shows improvement of 34%, 36%, and 4% in total travel time, average speed, and throughput at the 100% market penetration compared to an actuated system. Futhermore, results from the simulation highlight that at least 30% market penetration rate is critical for the proposed method.
Chang et al. [33] proposed a real-time traffic control system based on VANETs. In the system, VANETs was used to gather traffic information, then the algorithm estimated the queue lengths, assigned vehicles to each lane, and optimized cycle lengths and green splits for a traffic signal controller based on gathered information. To optimize the signal control, a dual ring configuration is used for adequate phase control and a green time estimation algorithm based on vehicle queue length is proposed to achieve the signal timing optimization. The simulation results show that the total waiting queue length is shortened and the waiting time is minimized compared to random control.
Pandit et al. [27] developed the oldest arrival first algorithm (OAF) to minimize the delay across the intersection by scheduling the optimal sequence of conflicted phases at each traffic light. This paper formulates the traffic signal as a job scheduling problem, where each job corresponds to a platoon of vehicles. First, a conflict graph is constructed indicating all competing traffic flows at each isolated intersection. Then, the rule of “first come first serve” schedules the competing platoons of traffic in each flow, using the estimated arrival time of each predictable platoon. Mathematical analysis and simulation implementation indicate that the correctness and benefits of the proposed algorithm over pre-timed and actuated scheduling traffic signal control method.
Younes et al. [34] proposed an intelligent traffic light controlling (ITLC) algorithm based on VANETs. In addition to the ITLC algorithm for the isolated intersection, this paper also presented an arterial traffic light (ATL) controlling algorithm for the arterial road. In the algorithms, vehicular ad hoc networks technology is utilized to gather the real-time traffic information at each signalized road intersection. Both ITLC and ATL algorithm optimize the sequence phases and the time of each phase according to the real-time traffic characteristics of all traffic flows. The experimental results show that ITLC can decrease the delay by 25% and increase the throughput of each road intersection by 30%. Moreover, ATL can increase the traffic fluency and the throughput by 70% on the arterial street.
Nafi et al. [35] presented a unique VANET based Intelligent Road Traffic Signaling System (IRTSS) system which can collect traffic information from individual cars and exchange road traffic information to dynamically control the traffic signaling cycle. Compared with the previous works, the proposed IRTSS can optimize the fuel consumption and emission by improving traffic flows. A new traffic estimation technique has been developed to implement an adaptive signal control method based on the vehicles density at the intersections. The simulation based on OPNET shows that the proposed method can achieve significant improvements in waiting time, compared to the fixed-time signal control.
Unlike the optimal signal light control, Tiaprasert et al. [22] presented queue-based adaptive signal control using connected vehicle technology. In this model, connected vehicle technology is used to estimate the queue length for adaptive signal control. To estimate the queue, a discrete wavelet transform is introduced to enhance the consistency of queue estimation for the first time. The proposed method can be implemented without the assumption of pre-timed signal, signal interval, and specific arrival distribution. In addition, the volume, queue characteristic, and signal timing are also not required in the model as basic input data. It is noted that the proposed algorithm is capable of estimating queue length under various pre-timed signal and actuated signal control for under-saturated/saturated conditions. The simulation result shows that the proposed queue based model performs well in the simulation.
Cheng et al. [20] developed a fuzzy group-based intersection control method based on VANETs. In the method, vehicles in the same lane are divided into small groups and vehicle groups are scheduled through wireless communication, rather than traffic signal lights. This method has two advantages against existing algorithms: (1) group-based scheduling reduces average waiting time; and (2) group-based scheduling improves the grouping fairness. Furthermore, the reinforcement learning is utilized to adjust the parameters of the network and make it adaptive to various traffic conditions. The results show that the proposed method can reduce waiting time and improve fairness in various cases and the advantage against traffic light algorithms can be up to 40%.
Ahmane et al. [21] presented a new traffic control method based on Timed Petri Nets with Multipliers (TPNM) for an isolated intersection. In this method, the control aims to smooth the traffic through the sequence of vehicles authorized to cross the intersection. The vehicles arriving at the intersection receive the traffic “right of way” state information by on-board equipment, the driver then decides whether to go through the intersection. The proposed method has an excellent performance in both a real intersection test and a simulation test.
Guler et al. [23] proposed a traffic signal control algorithm utilizing the information from connected vehicle technology for a single intersection. The proposed algorithm optimizes sequences of cars discharging from the intersection by incorporating information from equipped vehicles to minimize the total delay. This paper also studies the effect of automated vehicles by allowing for priority to switch between approaches rapidly and found only small decrease of delay for low demand scenarios. The value of platooning and signal adaptability to demand are also evaluated in this paper. The simulation based on MATLAB shows that the average delay can be reduced up to 60%, with the penetration rates increasing up to 60%. The result also indicates that the proposed method can also minimize the total number of stops.
Furthermore, an agent has been widely applied to the various intelligent research fields [36]. The agent-based model has also been introduced to optimize traffic signal control in a connected vehicle environment because of its utility in studying several agents specified at various scenarios, capturing the complex dynamic relationships and accounting for feedbacks between individuals their environments. Kari et al. [37] proposed an agent-based online adaptive traffic signal control (ATSC) based on connected vehicle technology. In the system, traffic at an intersection is considered to be a multi-agent system: (1) Vehicle Agent (VA); and (2) Intersection Management Agent (IMA). The VA is responsible for communicating real-time vehicle information to IMA and the IMA undertakes communicating with VA within a communication radius, and determining the optimal signal timing. Based on the user-defined Measure of Effectiveness, a VA need to predict certain information (e.g., Time-Of-Arrival) in order to provide the IMA with input. The other innovation is to improve the fixed sequence of traffic signal controller NEMA. A more advanced and flexible finite state machine is proposed in the paper. The total of 49 states, including main street and side streets, allow for a variety of signal strategies to implemented by the IMA. The queue length optimizer is presented to maximize the number of vehicles within a green light. Under both constant and varied demand scenarios, the system exhibits significant saving in reducing travel time and system-wide fuel economy.
While the majority of above papers optimize traffic performance, few studies take into consideration passengers’ feelings. Chou et al. [38] proposed a passenger-based adaptive traffic signal control mechanism. In the mechanism, Road Side Unit is considered as a traffic signal control agent and vehicular messages including passenger loading information, fuel pollutant emission, and fuel consumption. The expected arrival time of each vehicle to the intersection is calculated to compare with remaining green time. The green time will be adjusted according to the above parameters dynamically. The simulation results show that the proposed PATSC mechanism can improve the transportation efficiency up to 23.09%, and reduce pollutant emission up to 10.66%.
3.1.2. Control Strategies for Multiple Intersections
Priemer et al. [39] developed a decentralized adaptive traffic signal control algorithm with V2I communication data. The signal control algorithm is phase-based, but operated without common parameters like cycle times and offsets. The algorithm seeks to minimize the total queue length by optimizing phases in five-second intervals over a 20 s horizon using the techniques of dynamic programming and complete enumeration. To reduce the quality loss due to low or mid penetration rate, a method for queue length estimation (ql-estimation) [40] is incorporated to the control algorithm and queue length is estimated at the end of each interval. There are two innovative aspects to this paper: the first is analyzing various penetration rates; the second is assigning the priority to special vehicles like public transit or emergency vehicle, the coordinated control with neighbored intersections. Compared to TRANSYT-7F [41], a reduction of up to 24% in delay and increase by 5% in mean speed are reported. The simulation results also show that DP&CE with ql-estimation will improve the performance of method significantly when the penetration rate is below 33%.
Maslekar et al. [7] presented an adaptive traffic signal control system which utilizes V2V communications in VANETs. In this paper, clustering algorithm is implemented to estimate the number of vehicles approaching an intersection. Based on the estimated density, an adaptive cycle time and the green time for different phased at each intersection are calculated. A modifying Webster’s model is used to generate the cycle time of each traffic light in an adaptive system. In the system, cycle times and other safety parameters (green, red, and inter-green interval) computation together constitute car-car communication based adaptive traffic signal which obtain density information from VANET. The simulation results show CATS has an improvement in terms of average waiting time and the percentage of vehicles stopping at each road intersection.
Goodall et al. [42] proposed a predictive microscopic simulation algorithm (PMSA) for traffic signal control. The algorithm received data from connected vehicles including positions, headings, and speeds, and imported them to a microscopic simulation model to predict the future traffic conditions in a connected vehicle environment. A rolling horizon strategy of 15 s was chosen to optimize either delay only or a combination of delay, stops, and decelerations. In the algorithm, PMSA employs microscopic traffic simulator to simulate vehicles and calculates the objective function delay directly from vehicle’s simulated behavior. An important characteristic of the proposed algorithm is that it just requires instantaneous vehicle data and does not reidentify or track vehicles. The simulation results show the algorithm has much greater improvement at low and midlevel traffic volumes, and performs worsened under saturated and oversaturated conditions.
Similarly, Shaghaghi et al. [43] presented a new VANET-based adaptive green traffic signal control system (AGTSC-VC). In the system, signal control is defined into two main steps: (1) VANET-assisted traffic information gathering; and (2) traffic density assessment and traffic signal timing generation. The cluster algorithm is employed to calculate the density of vehicle. Three types of packets including header-packet, reply-packet, and traffic-load-packet are used to provide traffic density information at the intersection. Density-based and priority-based traffic signal timing method make the performance of the proposed approach better than the traditional method. The simulation results demonstrate the superiority of AGTSC-VC in improving the accuracy of vehicle density estimation, decreasing the waiting delays of vehicles, conspicuously reducing the gas emission rates, and decreasing the travel time of prioritized vehicles.
Islam et al. [44] proposed a Distributed-Coordinated methodology for signal timing optimization in a connected vehicle environment. In the method, the signal timing optimization problem is reformulated based on a central architecture, where all signal timing parameters were optimized in one mathematical program. As a result of this distribution, a mathematical program only controls the timing of a single intersection. Based on this method, the complexity of the traffic signal control problem was significantly reduced. The simulation demonstrates that the proposed algorithm can increase intersection throughput between 1% and 5%, and decrease travel time between 17% and 48%, compared to actuated coordinated signals.
Liu et al. [45] presented a reinforcement learning traffic control method integrating a dynamic clustering algorithm. In this paper, a dynamic clustering algorithm is proposed to achieve a relatively stable cluster structure and enhance traffic data collection efficiency. By integrating the clustering algorithm, a cooperative reinforcement learning control scheme is utilized to optimize the road traffic and signal control. The simulation based on SUMO shows that the proposed method can effectively improve the throughput, reduce the average waiting time and avoid traffic congestion compared to the traditional adaptive signal control method.
Compared to the single traffic modal considered in the above papers, He et al. [46] presented the platoon-based arterial multi-modal (transit and passenger car) signal control method called PAMSCOD under V2I environment. In the proposed method, a headway based platoon recognition algorithm is developed to identify pseudo-platoons based on the online probe data. A mixed integer linear program problem was used to optimize phasing sequence and start time of phases for the next considered cycle based on the current traffic controller status, traffic conditions, platoon data, and priority requests. The simulation based on VISSIM shows that the proposed PAMSCOD can reduce the vehicle delay for both under-saturated and oversaturated traffic condition. In particular, the result also indicates that a 40% penetration rate is critical for the performance of state-of-practice signal control methods.
To address the conflicting problems in the above PAMSCOD due to different control objectives, He et al. [47] integrated multi-modal priority control method including emergency vehicles, transit buses, commercial trucks, and pedestrians, with the consideration of actuated-coordination. In the proposed method, a request-based mixed-integer linear program (MILP) formulation is utilized to accommodate multiple priority requests from different modes and optimize the signal timing. Further, the signal coordination is achieved based on integrating virtual coordination requests for priority in the formulation. However, it should be noted that the communication between different traffic modes, especially pedestrian-vehicle/infrastructure communication, was assumed in this paper. The simulation results demonstrate that the proposed method can reduce bus delay by 24.9% and pedestrian delay by 14%.
Hu et al. [48] proposed a person-delay-based optimization method for transit signal priority (TSP) which enables bus/signal cooperation and coordination among consecutive signalized intersections under the connected vehicle environment. A Binary Mixed Integer Linear Program is used to solve the bus delay from an upstream intersection to downstream intersections, and thus minimizes personal delay for all users. In the methods, coordinated TSP with connected vehicle (TSPCV-C) logic is designed to achieve transit-signal cooperation and coordination among intersections. Simulation results show that the proposed TSPCV-C logic reduces the bus delay between 55% and 75%, compared to the conventional TSP. However, the system may not be used for cases with multiple conflicting bus lines and multiple priority requests under its current form.
The concept of agent has also been used to optimize multi-intersection signal control. Ezawa et al. [49] proposed an adaptive traffic signal control based on vehicle route sharing. The vehicle route sharing was to share position and path information, and the route sharing information was used for calculating expected traffic congestion. In the system, each traffic signal control agent has two traffic controllers: Cycle-Split controller (CS-controller) and Offset control (O-controller). The former optimizes traffic signal cycle length and split based on calculating the average and total expected traffic congestion respectively. The O-controller will activate the offset cooperation if the ratio of expected traffic congestion of an inflow link to outflow links. The simulation results show that the proposed methods outperform other traditional traffic signal control strategies.
Xiang et al. [50] presented a novel multi-agent based control method for an integrated network of adaptive traffic signal controllers under V2I communication environment. There are two innovations in the system: (1) the novel grid and mixed truncated Gauss model is suitable for parallel processing; and (2) co-learning provides the recommended shortest time path. The intersection is treated as an agent and a Markov decision process is used for modelling the intersection of an agent with its own environment. Further, the agents interact with the environment by trying out actions and use resulting feedback to reinforce behavior that leads to a desired outcome. The traffic signal control is based on the following parameters to realize the optimization: vehicle state, action, objective function, and iterative update rules. The simulation results show that the average travel time per vehicle, the average delay per vehicle and the average queue length reduce significantly compared to the traditional traffic signal control method.
Compared to the above papers, Tomescu et al. [51] took into consideration the driver behavior and new parameters including weather, vehicle type, and road event, and proposed a new adaptive traffic light system and a new traffic light green-wave control algorithm. In the system, Webster’s equation [29] is used to calculate the cycle length for each intersection and the maximum cycle length is selected as the cycle length of entire system. In the determination of optimal offset, the fuzzy logic algorithm is used to adjust the offset based on weather, vehicle type, and road events, owing to the algorithm better capturing human expertise. The evaluation shows that the proposed method can significantly reduce stop number and each car’s delay.
Although scholars utilized various models and algorithms to study adaptive traffic signal control in a connected vehicle environment from different perspectives, the ultimate goal was to reduce the delay and improve the overall traffic efficiency by optimizing the road traffic signal control.
3.2. Estimation of Unequipped Vehicle Status
Even though some connected vehicle-based adaptive traffic signal control methods perform better at higher connected vehicle penetration rates, many are unable to outperform traditional applications at low penetration rates. The penetration rate of equipped vehicles has a great influence on spatial temporal dispersion of equipped vehicles [52], so the penetration rate may be a critical parameter in determining the effectiveness of signal control algorithms. Therefore, it is necessary to estimate the unequipped vehicle status to improve the performance of the method.
Priemer et al. [39] integrated queue length estimation (ql-estimation) [40] into the proposed control algorithm. Two different scenarios are considered in the system. In a high penetration rate, the queue length is directly calculated. However, in a low or mid penetration rate, queue length is estimated based on the data from multiple sensors technology. Both scenarios work at the end of each interval. The objective of the signal control is to determine the optimal phase sequence in order to minimize the total queue. The simulation shows that Dynamic Programming (DP) & Complete Enumeration (CE) with ql-estimation improves DP&CE’s performance significantly with a penetration rate below 33%. The performance of DP&CE with ql-estimation is nearly equal to the TRANSYT-7F at a penetration rate of 20%.
Lee et al. [24] applied the Kalman filtering (KF) technique to estimate traffic states for cumulative travel-time under imperfect connected vehicle penetration rates. Owing to the result of the feedback characteristic of the KF technique to recursively correct the errors within the boundary set by both process and measurements noise variances. The KF technique outperformed various similar methods in dealing with either traffic status estimation. In this paper, the KF algorithm is comprised of two equations: (1) a state-space equation; and (2) a measurement equation. The former affirms that the current states resulting from the previous states, that is, the previous input actions and noises that occurred at the previous time period. The measurement equation explains that the current measurements can be obtained from the current estimated states, or vice versa with some noise.
To construct a complete prediction arrival table, the location and speed of each vehicle including unequipped vehicles on the roadway needs to be estimated. Feng et al. [17] proposed an algorithm called EVLS to estimate vehicle status of unequipped vehicles. In the system, the road segment near an intersection is divided into three regions: queuing region, slow-down region, and free-flow region. The location and speed of each unequipped vehicle in each region are estimated based on different algorithms. In a queuing region, the locations and stopping times of the last stopped vehicle and the second to the last stopped connected vehicle are used to estimate the unequipped vehicle. In the slow-down region, Wiedemann’s car following model is selected to estimate the state of unequipped vehicles which react with their leading vehicle rationally. In the free flow region, the vehicles are assumed to behave independently and not interact with other vehicles. The number of equipped vehicles is divided by the penetration rate to obtain the total number of vehicles. The speeds of the unequipped vehicles are assumed to be either the posted speed limit or the average speed of the connected vehicles observed in the field.
Three methods estimate the status of unequipped vehicles from different aspects: queue, travel-time, location, and speed. Further, those methods play a positive role in studying the performance of traffic signal control under different penetration rate and the impact of unequipped vehicles on traffic signal control in a connected vehicle environment.
3.3. Simulation Platform
The field traffic validation is so complex and the testing process is not only increasingly expensive, but is also extremely time consuming. Consequently, time and site condition restrictions often render field tests cumbersome, which is why simulations are an indispensable part of the overall research. In order to demonstrate the effectiveness of the proposed method, different simulation platforms are employed to simulate various testing scenario. In a connected vehicle environment, the selected simulation platform needs to meet two basic conditions: (1) an event-based network simulator achieves vehicle-to-vehicle and vehicle-to-infrastructure communication; and (2) a road traffic simulator simulates road condition and traffic demand. A summary of simulation platform and basic description is shown in Table 4.
In this section, we will focus on several traffic simulation platforms which are widely used in a connected vehicle environment. VISSIM [54], with its powerful and mature simulation module, is the preferred platform for researchers to simulate intersection traffic signal control scenarios. The COM (component object model) and API (Application Programming Interface) interface provide powerful secondary development capabilities to implement vehicle-vehicle or infrastructure communication under a connected vehicle environment. In [17,22,24,42,44,46,47,48,50], VISSIM is used to simulate the intersection traffic signal control scenarios based on the proposed methods. VISSIM itself can model roads, intersections, vehicle characteristics, car following models, etc. To achieve the communication between vehicle and vehicle/infrastructure, drivermodel.dll API and virtual ASC controller are added in [17]. In [42], a program based on C# programming language is added through VISSIM-COM to extract individual vehicle characteristics. In [24], to incorporate the simulation of connected vehicle environment and the implementation of the Kalman filter algorithm, MATLAB is employed to connect with VISSIM through COM interface. VISSIM-COM, the ASC virtual controller as the simulation environment, and GAMS/CPLEX as optimization solver, constitute the entire simulation platform in [46,47]. In the simulation process, COM starts a VISSIM simulation and sends the data to CPLEX. After retrieving optimal plan, COM implements the signal timing by sending phase control commands to ASC controller. In [22,50], VISSIM is selected as a simulation platform to generate individual vehicle’s information and estimate the average travel time or queue length as an output.
Compared to the above software, SUMO [55], as an open source tool, provides a wide range of traffic planning and simulation functionalities to support scientific research. In [37], SUMO is used together with the Comprehensive Modal Emissions Model (CMEM) through the python Traffic Control Interface (TraCI). Furthermore, SUMO can couple other network simulation software to achieve V2X environment simulation platform. In [45], a network simulator NS3 and SUMO are connected by the TraCI interface. During the simulation, the VANET nodes in NS3 is used to execute the data and the fixed nodes corresponding to intersections generate the traffic data information and produce adaptive traffic signal control commands. The data and control commands will be sent back to the traffic simulator SUMO through TRACI. Moreover, SUMO couples network simulation software OMNeT++ into the V2X simulation platform Veins [53] through the TRACI interface. In [27,43], SUMO is used to model the road and traffic characteristics. The TraCI interface is utilized for synchronizing the generated traffic scenarios of SUMO into the OMNET++ simulator to implement V2X.
NCTUns [56], with its high fidelity and well scalability, becomes many research scholars’ choice. As compared with VISSIM and SUMO, NCTUns provides users with a simulation environment in which traffic simulation and network simulation are tightly integrated. In [7,38], NCTUns is used to model the proposed traffic signal control methods to gather the traffic data information and, at the same time, estimate the related parameters, such as the density, fuel consumption, etc. However, it has been commercialized as a simulation software EstiNet.
AIMSUN NG [57] is the first to integrate macro, meso, and micro models into a single software. It can provide a convenient secondary development platform to complete the complex simulation tasks under a connected vehicle environment. In [39], the proposed traffic signal control algorithm based on C++ programming language is implemented in AIMSUN NG simulator through AIMSUN NG API. Via the API module, AIMSUN NG provides the algorithm module with current traffic data, and in turn, the optimal results are sent to the microscopic simulator.
The Green Light District (GLD) simulator [58], based on Java, allows users to add infrastructures, to set different traffic patterns, and to evaluate the controllers using different statistical measures (such as average waiting time). In [33], to achieve the inter-vehicle communication, a packet-based communication simulator is added to GLD simulator. New algorithms for traffic signal control are added to GLD simulator through the expansion of source codes.
Moreover, MATLAB [59] is a powerful mathematical modeling software that simulates the various complex models. MATLAB, in general, is used as a joint simulation with traffic simulation software based on certain API. In [51], to calculate the offset adjustment constant, fuzzy logic program is coded in MATLAB to evaluate and the optimal offset parameter. MATLAB is utilized to model and estimate the proposed intersection control algorithm in [23]. Compared to the aforementioned professional traffic simulation software, MATLAB cannot show relatively realistic traffic simulation scenarios.
4. Quality and Reviewed Studies
The scores of the quality of each eligible paper range from 3 to 11, as shown in Table 5. According to Table 5, only 3 studies (11.54%) estimated the unequipped vehicle status in an imperfect connected vehicle penetration rate. In the selected papers, 14 studies (53.85%) employed more than two objective functions to optimize the proposed traffic signal control method. All studies have been simulated to verify the reliability of the proposed method. However, in all selected papers, the simulations were not all based on the field data and field scenarios. 9 studies (45.00%) and 13 studies (56.52%), respectively, used the field data and field scenarios to simulate the adaptive traffic signal control method. In view of penetration rate, 8 studies (30.77%) took into account the performance of the proposed method under different penetration rates. Nearly all studies (n = 25, 96.15%) compared results with other traffic signal control methods in order to highlight the superiority of the proposed method.
5. Limitations and Strengths
The following limitations should be considered when interpreting the existing results. First, we limited our search to papers published in English, thus, relevant literature published in other languages was excluded. Second, all included studies were adaptive traffic signal control, while other traffic signal control methods applied in a connected vehicle environment were not be discussed. This study had several strengths. First, it used an extensive search strategy to locate papers in six databases and rigorously screened papers through well-defined inclusion/exclusion criteria. Second, the quality of included papers was assessed in a standardized way.
6. Discussion
Adaptive traffic signal control based on a connected vehicle environment is a relatively emerging research field. Compared with traditional traffic signal control methods, this method has many advantages on reducing the delay and improving the road traffic flow efficiency. From the abovementioned review, the essence of optimizing the traffic signal is to minimize the vehicle delay at the intersection by retiming traffic signals or optimizing vehicle queue. Minimizing the delay can reduce the waiting time for vehicles, smooth the traffic flow at intersections, and reduce the exhaust emissions. In brief, this method not only improves the efficiency of the road transport system, but also reduces the fuel consumption and gas emissions.
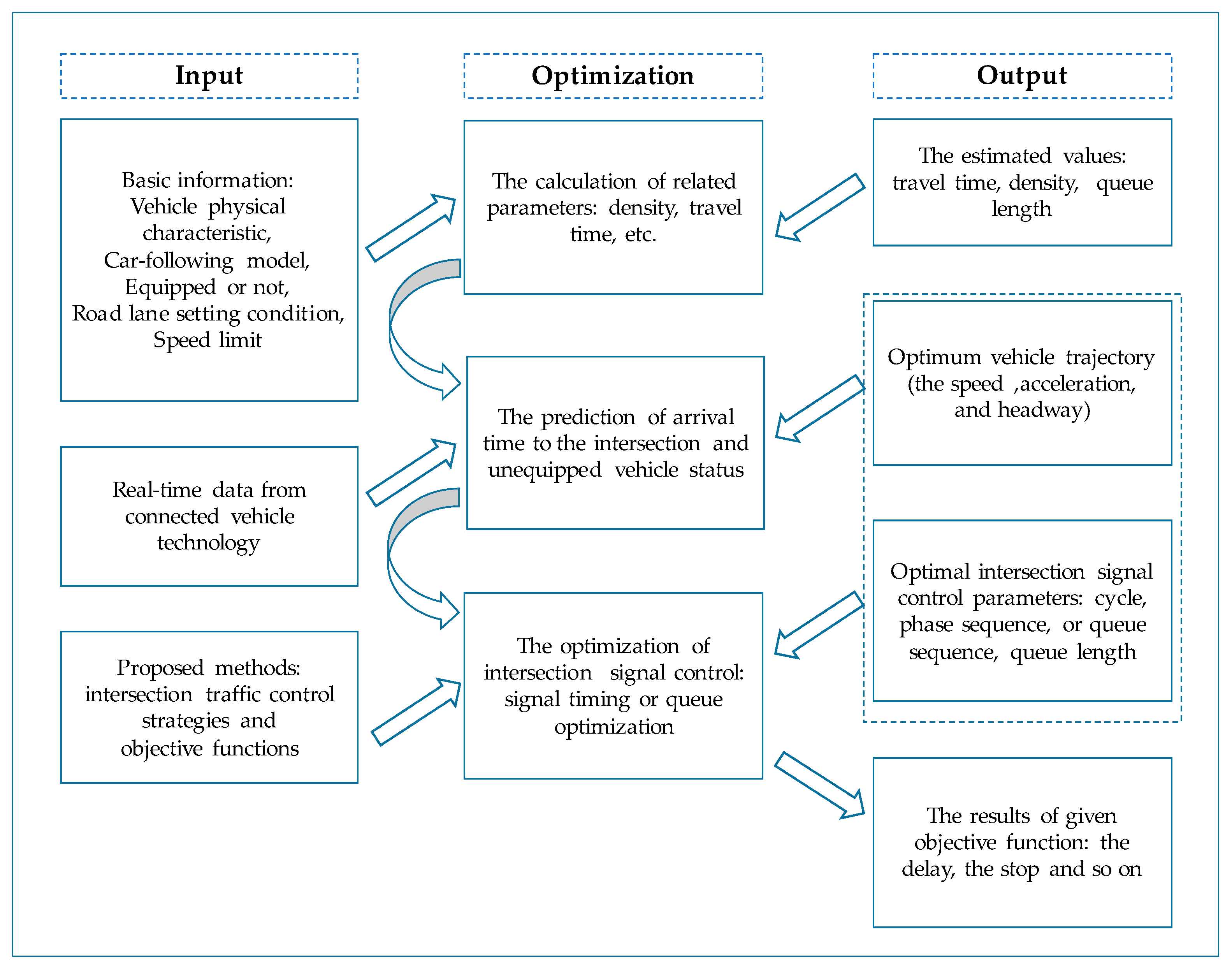
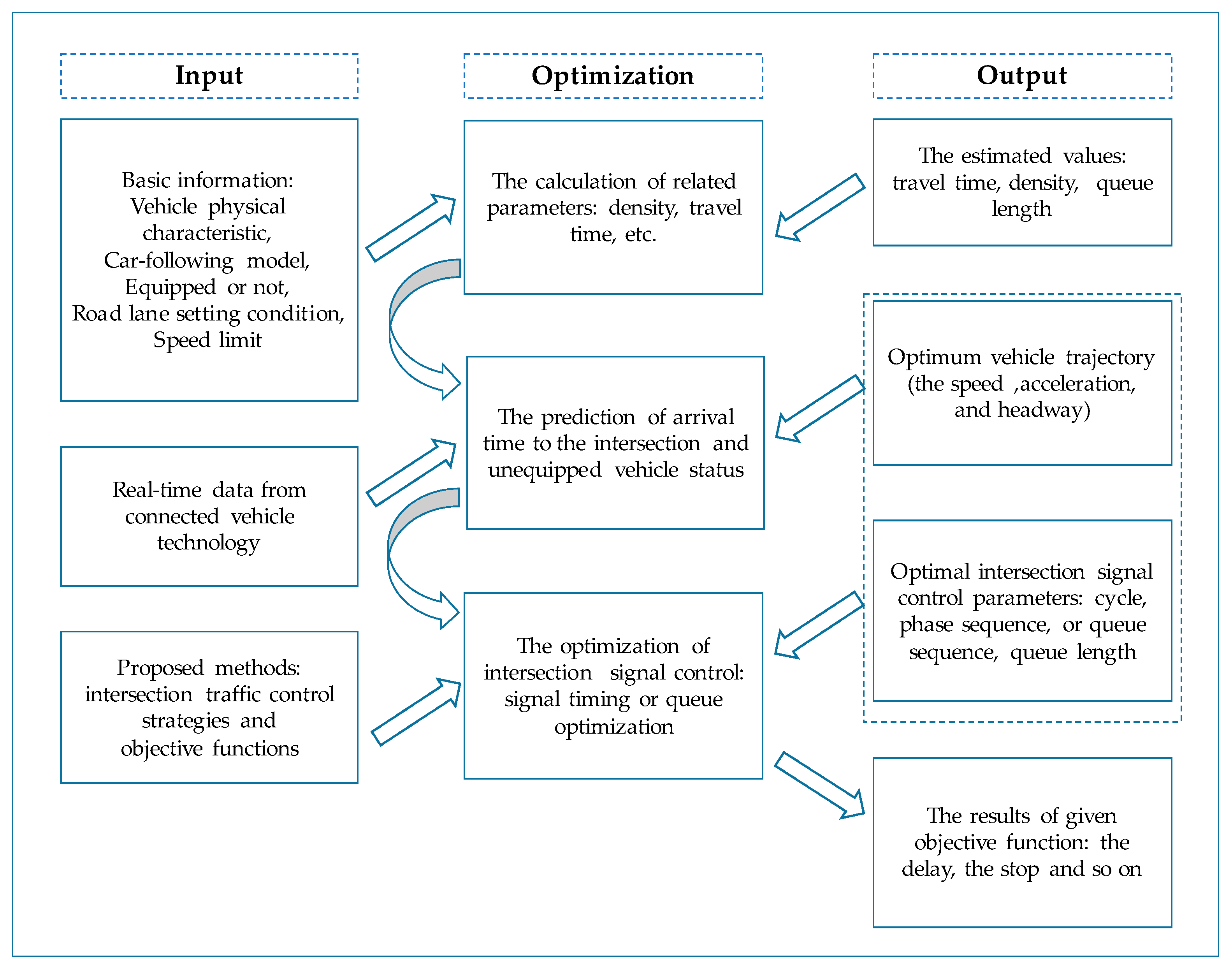
An adaptive traffic signal control framework is summarized based on the existing research, with aims to support future research, as shown in Figure 2. The framework is divided into three modules: input, optimization, and output. In the input module, basic information including vehicle information, intersection information, proposed intersection signal control method, and objective functions will provide a basic input setting for optimization module. It is to be noted that the car-following model in a connected vehicle environment may be different from traditional models. In the optimization module, the simulation software will calculate the related parameters, estimate unequipped vehicle status, and determine the arrival time of each vehicle. Based on the above process, the adaptive traffic signal control will be optimized based on the objective functions. In the output module, the optimum parameter will be sent to the optimization module, including optimum trajectory of each vehicle and other pre-setting output parameters. Moreover, the module provides the results of a given objective function for the authors to evaluate the proposed methods.
Although there has been a fruitful development of models and solution techniques to research the adaptive traffic signal control in a connected vehicle environment, there are still many research questions, such as the following:
- The existing researches were mainly focused on the optimization-based method. This literature optimized the traffic signal control through building the optimization model of traffic dynamic and traffic signal control strategy. There are still opportunities for optimization problems that are solved. For instance, the machine learning method has been widely used in various fields of artificial intelligence. The method based on machine learning can optimize the controller’s policy through trial-and-error interactions with an environment, which is in accordance with traffic signal strategy: optimizing the signal timing through the traffic flow dynamic. However, only a few authors have employed this method to optimize the traffic signal control in a connected vehicle.
- The proposed models used to optimize the traffic signal control might be complex, and computationally expensive, sensitive to modelling errors. It is necessary to highly improve the robustness, versatility, and precision of the proposed model. Furthermore, in order to facilitate the validation of the models, many scholars employed a simplified road or intersection model for simulation. However, road and intersections are relatively more complex in reality, which poses a challenge to the adaptability of the models.
- From the review, the market penetration rate of connected vehicles was a critical parameter in determining the effectiveness of the connected vehicle related signal control algorithms. The source [46] showed that a 40% penetration rate is critical for the performance of proposed signal control method. Goodall [42] also indicated that the required minimum penetration rate for traffic signal control in a connected vehicle environment was 20–30%. It is necessary to verify the performance and adaptability of the proposed model under different penetration rates.
- In addition, although [17,24,39] proposed three various methods to estimate the status of unequipped vehicles from different aspects (queue, travel-time, location, and speed), the research on the status estimation of unequipped vehicle in a connected vehicle environment was limited. For the complexity of microscopic driving behavior model, more focus should be on the unequipped vehicle status based on the car following model.
- In terms of the applied scope of signal control methods, many proposed models can only be implemented to an isolated intersection, but it cannot achieve the coordinated control of multiple intersections or the arterial green wave control. However, the intersection is not isolated in the road network and the adjacent or multiple intersections should achieve synchronization or coordination control and, ultimately, obtain the global optimal control in the actual traffic management and control. This problem leads to an important effect on fluency for vehicles on the road network.
- The existing methods generally consider a single-modal traffic, which ignore integrating multi-modal traffic or priority for special modes, such as transit, truck, and pedestrians into the methods. This is one of the future research directions because the traffic flow system is a human-joined, changeable, and complex system. Therefore, more road traffic factors should be taken into account in the modeling process.
- The inter-vehicle or vehicle-infrastructure communication is another aspect in need of attention. In the selected papers, the method achieved information exchange between vehicle and vehicle/infrastructure by default. However, data dropout is unavoidable in the actual process of network communication and data transmission, which may greatly affect performance of traffic signal control system. Unfortunately, our review focuses more on the signal control methods.
7. Conclusions
In this paper, we present a thorough and systematic review on adaptive traffic signal control in a connected vehicle environment. In order to have a strict evaluation process, this review has provided a detailed discussion and analysis of adaptive traffic signal control methods, such as the method implemented in the selected papers, the estimation of unequipped vehicle status, and the simulation platform employed in those papers. The review has also carefully discussed advantages and disadvantages of the different methods or strategies used in the selected papers.
To our knowledge, this is the first systematic review of the existing methods of adaptive traffic signal control in a connected vehicle environment. The existing adaptive signal control methods mainly focus on two research directions: one is to optimize the signal timing and the other is to optimize the queue. The best available evidence indicates that adaptive traffic signal control can significantly reduce the delay and improve the road traffic efficiency. The present systematic review shows that adaptive traffic signal control research in a connected vehicle environment is in its infancy. Limited by the development of connected vehicle technology and hardware support, the proposed methods can only be verified by simulation experiments. Future work examining their adaptability and validity based on the field testing is warranted. Finally, further research is needed to develop efficient and generic adaptive traffic signal control methods in a connected vehicle environment.
8. Future Work
Based on the literature review, a thorough analysis of adaptive traffic signal control in a connected vehicle environment suggests that there are significant opportunities for innovation in adaptive traffic signal control research within this domain. These include:
- The existing signal control models and optimization methods are based primarily on unsaturated traffic flow. With the rapid increase in motorization level, the road traffic congestion has become a common problem all over the world. Although the connected vehicle technology will reduce the traffic congestion in a certain degree, traffic congestion remains a problem in the period ahead [60]. Therefore, traffic signal control models and strategies for saturated and over-saturated intersections are one of the important directions for future research.
- Intelligent control and artificial intelligence technology (such as genetic algorithm, reinforcement learning, expert system, etc.) provide more choices for the optimization algorithm and signal control method. Compared with the existing optimization methods, the advantage of intelligent control is that its control algorithm has a strong approximation nonlinear function without relying on the precise mathematical model. This may be an effective method for a traffic signal control system that is hard to build a better mathematical model, especially in a connected vehicle environment. Although [45,61] proposed the reinforcement learning based signal control methods and [32] developed a traffic signal control based on approximate dynamic programming, research on intelligent control in a connected vehicle environment is still limited. Intelligent control will attract more researchers’ attention.
- Although connected vehicles will have rapid development in the near future, the transit, bus rapid transit, new tram, and other public transport systems will still have a critical role in the whole transport system. Public transportation development has attracted increasing attention, which is the rational trend of cities’ passenger traffic structure. Some authors [46,47] proposed multi-modal traffic signal control methods, but the research on multi-modal traffic is still limited at present. Therefore, the special vehicle priority needs to be taken into account in regard to developing the intersection control methods in a connected vehicle environment.
- In future traffic control system research, the advantages of distributed system, centralized system, and multilayer distributed system should be fully taken to account. Based on the above methods, the complex signal controls can be simplified into several logical steps to ultimately achieve global optimization. The signal control system should be more flexible, switchable, and adaptive to different control system structure, which can be applicable to different traffic scenarios.
- Autonomous vehicle technology recently has attracted more and more researchers’ attention. Autonomous vehicles (AVs) represent an emerging transportation mode for driverless transport [62,63,64,65]. Compared to the existing conventional vehicles and present connected vehicles-based control method, the traffic signal control method based on an autonomous vehicle environment will undergo a new stage of development. Some innovative ideas have been proposed based on autonomous vehicles. Some [66,67] proposed the reservation-based intersection control methods, which allocate “the right of way” of the intersection based on the series of pre-defined rules. Others [68,69] proposed the trajectory-based algorithms. Under this scenario, traffic signal controllers at intersections are removed and the intersection control is based on all vehicle trajectories through the intersection. In summary, there are two main types of algorithms used to optimize the intersection control in an autonomous vehicle environment: signal scheduling and trajectory planning. Reservation-based algorithms focus mainly on obtaining the optimal sequence of each lane by sorting the requests from upcoming AVs. Trajectory-based algorithms, however, benefit the connectivity of AVs to make preparations for the optimal departure timing and speed far ahead from the stop line.
Several recommendations put forward in this review provide a foundation for future research on traffic signal control method in a connected vehicle environment. The relatively recent breakthroughs in autonomous vehicle technology have allowed researchers to investigate the impact of autonomous vehicles on intersection signal control. However, it is clear that the application of connected vehicle technology in the traffic signal control domain is still in its early stages. There remains considerable opportunities in developing the intersection signal control in a connected vehicle environment.
Supplementary Materials
Supplementary File 1Conflicts of Interest
The authors declare no conflict of interest.
References
- Olia, A.; Abdelgawad, H.; Abdulhai, B.; Razavi, S.N. Assessing the Potential Impacts of Connected Vehicles: Mobility, Environmental, and Safety Perspectives. J. Intell. Transp. Syst. Technol. Plan. Oper. 2014, 23, ix–xii. [Google Scholar] [CrossRef]
- Li, M.; Boriboonsomsin, K.; Wu, G.; Zhang, W.B.; Barth, M. Traffic Energy and Emission Reductions at Signalized Intersections: A Study of the Benefits of Advanced Driver Information. Int. J. Intell. Transp. Syst. Res. 2009, 7, 2327–2332. [Google Scholar]
- Coelho, M.C.; Farias, T.L.; Rouphail, N.M. Impact of speed control traffic signals on pollutant emissions. Transp. Res. Part D Transp. Environ. 2005, 10, 323–340. [Google Scholar] [CrossRef]
- Denney, R.W., Jr.; Curtis, E.; Olson, P. The National Traffic Signal Report Card. ITE J. 2012, 86, 22–26. [Google Scholar]
- Fatima, K.; Fatima, K. Modal Congestion Management Strategies and the Influence on Operating Characteristics of Urban Corridor. Master Thesis, RMIT University, Melbourne, Australia, 2015. [Google Scholar]
- Auditorgeneral, V.; Office, S. Managing Traffic Congestion; Highway Traffic Control: Saugatuck, CT, USA, 2013. [Google Scholar]
- Maslekar, N.; Mouzna, J.; Boussedjra, M.; Labiod, H. CATS: An adaptive traffic signal system based on car-to-car communication. J. Netw. Comput. Appl. 2013, 36, 1308–1315. [Google Scholar] [CrossRef]
- Hoogendoorn, S.; Knoop, V. Traffic Flow Theory and Modelling; Edward Elgar Publishing Limited: Cheltenham, UK, 2012. [Google Scholar]
- Zheng, X.; Recker, W.; Chu, L. Optimization of Control Parameters for Adaptive Traffic-Actuated Signal Control. J. Intell. Transp. Syst. 2010, 14, 95–108. [Google Scholar] [CrossRef]
- Zheng, X.; Chu, L. Optimal Parameter Settings for Adaptive Traffic-Actuated Signal Control. In Proceedings of the International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008. [Google Scholar]
- Sims, A.G.; Dobinson, K.W. The Sydney coordinated adaptive traffic (SCAT) system philosophy and benefits. IEEE Trans. Veh. Technol. 1980, 29, 130–137. [Google Scholar] [CrossRef]
- Gartner, N.H. OPAC: A Demand Responsive Strategy for Traffic Signal Control; Transportation Research Record: Washington, DC, USA, 1983; No. 906; pp. 75–81. [Google Scholar]
- Bing, B.; Carter, A. SCOOT: The World’s Foremost Adaptive Traffic Control System; Traffic Technology International’95; UK and International Press: Surrey, UK, 1995.
- Mirchandani, P.; Head, L. A real-time traffic signal control system: Architecture, algorithms, and analysis. Transp. Res. Part C Emerg. Technol. 2001, 9, 415–432. [Google Scholar] [CrossRef]
- Henry, J.J.; Farges, J.L.; Tuffal, J. The Prodyn Real Time Traffic Algorithm. Control Transp. Syst. 1984, 16, 305–310. [Google Scholar]
- Brilon, W.; Wietholt, T. Experiences with Adaptive Signal Control in Germany. Transp. Res. Rec. J. Transp. Res. Board 2013, 2356, 9–16. [Google Scholar] [CrossRef]
- Feng, Y.; Head, K.L.; Khoshmagham, S.; Zamanipour, M. A real-time adaptive signal control in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2015, 55, 460–473. [Google Scholar] [CrossRef]
- Huang, Q.; Miller, R. Reliable Wireless Traffic Signal Protocols for Smart Intersections. In Proceedings of the 14th ITS America Annual Meeting and Exposition, San Antonio, TX, USA, 26–28 April 2004. [Google Scholar]
- Wu, J.; Abbas-Turki, A.; Correia, A.; El Moudni, A. Discrete Intersection Signal Control. In Proceedings of the IEEE International Conference on Service Operations and Logistics, and Informatics, Philadelphia, PA, USA, 27–29 August 2007. [Google Scholar]
- Cheng, J.; Wu, W.; Cao, J.; Li, K. Fuzzy Group Based Intersection Control via Vehicular Networks for Smart Transportations. IEEE Trans. Ind. Inform. 2017, 13, 751–758. [Google Scholar] [CrossRef]
- Ahmane, M.; Abbas-Turki, A.; Perronnet, F.; Wu, J.; El Moudni, A.; Buisson, J.; Zeo, R. Modeling and controlling an isolated urban intersection based on cooperative vehicles. Tramsp. Res. Part C Emerg. Technol. 2013, 28, 44–62. [Google Scholar] [CrossRef]
- Tiaprasert, K.; Zhang, Y.; Wang, X.B.; Zeng, X. Queue Length Estimation Using Connected Vehicle Technology for Adaptive Signal Control. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2129–2140. [Google Scholar] [CrossRef]
- Guler, S.I.; Menendez, M.; Meier, L. Using connected vehicle technology to improve the efficiency of intersections. Transp. Res. Part C Emerg. Technol. 2014, 46, 121–131. [Google Scholar] [CrossRef]
- Lee, J.; Park, B.; Yun, I. Cumulative Travel-Time Responsive Real-Time Intersection Control Algorithm in the Connected Vehicle Environment. J. Transp. Eng. 2013, 139, 1020–1029. [Google Scholar] [CrossRef]
- Vrabel, M. Preferred Reporting Items for Systematic Reviews and Meta-Analyses. Oncol. Nurs. Forum 2015, 42, 552. [Google Scholar] [CrossRef] [PubMed]
- Peirce, S.; Mauri, R. Vehicle-Infrastructure Integration (VII) Initiative Benefit-Cost Analysis: Pre-Testing Estimates; Draft Report; Intelligent Transportation Systems Joint Program Office: Washington, DC, USA, 2007.
- Pandit, K.; Ghosal, D.; Zhang, H.M.; Chuah, C.N. Adaptive Traffic Signal Control with Vehicular Ad hoc Networks. IEEE Trans. Veh. Technol. 2013, 62, 1459–1471. [Google Scholar] [CrossRef]
- Gradinescu, V.; Gorgorin, C.; Diaconescu, R.; Cristea, V.; Iftode, L. Adaptive Traffic Lights Using Car-to-Car Communication. In Proceedings of the IEEE Vehicular Technology Conference—VTC 2007-Spring, Dublin, Ireland, 22–25 April 2007. [Google Scholar]
- Webster, F.V.; Cobbe, B.M. Traffic Signals; Road Research Technical Paper No. 56; Her Majesty’s Stationery Office: London, UK, 1966; Volume 4, pp. 206–207. [Google Scholar]
- Howard, R.A. Dynamic Programming. Manag. Sci. 1966, 12, 317–348. [Google Scholar] [CrossRef]
- Werbos, P.J. Approximate dynamic programming for real-time control and neural modeling. In Handbook of Intelligent Control: Neural Fuzzy & Adaptive Approaches; Van Nostrand Reinhold: New York, NY, USA, 1992. [Google Scholar]
- Cai, C.; Wang, Y.; Geers, G. Vehicle-to-infrastructure communication-based adaptive traffic signal control. IET Intell. Transp. Syst. 2013, 7, 351–360. [Google Scholar] [CrossRef]
- Chang, H.J.; Park, G.T. A study on traffic signal control at signalized intersections in vehicular ad hoc networks. Ad Hoc Netw. 2013, 11, 2115–2124. [Google Scholar] [CrossRef]
- Younes, M.B.; Boukerche, A. Intelligent Traffic Light Controlling Algorithms Using Vehicular Networks. IEEE Trans. Veh. Technol. 2016, 65, 5887–5899. [Google Scholar] [CrossRef]
- Nafi, N.S.; Khan, J.Y. A VANET based Intelligent Road Traffic Signalling System. In Proceedings of the Telecommunication Networks and Applications Conference, Brisbane, QLD, Australia, 7–9 November 2012. [Google Scholar]
- Jennings, N.R.; Sycara, K.; Wooldridge, M. A Roadmap of Agent Research and Development. Auton. Agents Multi-Agent Syst. 1998, 1, 7–38. [Google Scholar] [CrossRef]
- Kari, D.; Wu, G.; Barth, M.J. Development of an agent-based online adaptive signal control strategy using connected vehicle technology. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014. [Google Scholar]
- Chou, L.D.; Deng, B.T.; Li, D.C.; Kuo, K.W. A passenger-based adaptive traffic signal control mechanism in Intelligent Transportation Systems. In Proceedings of the International Conference on ITS Telecommunications, Taipei, Taiwan, 5–8 November 2012. [Google Scholar]
- Priemer, C.; Friedrich, B. A decentralized adaptive traffic signal control using V2I communication data. In Proceedings of the International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009. [Google Scholar]
- Priemer, C.; Friedrich, B. A method for tailback approximation via C2I-data based on partial penetration. In Proceedings of the 15th World Congress on Intelligent Transport Systems and ITS America’s 2008 Annual Meeting, New York, NY, USA, 16–20 November 2008. [Google Scholar]
- Wallace, C.E.; Courage, K.G.; Reaves, D.P.; Schoene, G.W.; Euler, G.W. TRANSYT-7F User’s Manual; Federal Highway Administration: Washington, DC, USA, 1984.
- Goodall, N.J.; Smith, B.L.; Park, B. Traffic Signal Control with Connected Vehicles. Transp. Res. Rec. J. Transp. Res. Board 2013, 2381, 65–72. [Google Scholar] [CrossRef]
- Shaghaghi, E.; Jabbarpour, M.R.; Noor, R.M.; Yeo, H.; Jung, J.J. Adaptive green traffic signal controlling using vehicular communication. Front. Inf. Technol. Electr. Eng. 2017, 18, 373–393. [Google Scholar] [CrossRef]
- Islam, S.M.A.B.; Hajbabaie, A. Distributed coordination and optimization for signal timing in connected transportation networks. Transp. Res. Part C Emerg. Technol. 2017, 80, 272–285. [Google Scholar] [CrossRef]
- Liu, W.; Qin, G.; He, Y.; Jiang, F. Distributed Cooperative Reinforcement Learning-Based Traffic Signal Control that Integrates V2X Networks’ Dynamic Clustering. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- He, Q.; Head, K.L.; Ding, J. PAMSCOD: Platoon-based Arterial Multi-modal Signal Control with Online Data. Transp. Res. Part C 2012, 20, 164–184. [Google Scholar] [CrossRef]
- He, Q.; Head, K.L.; Ding, J. Multi-modal traffic signal control with priority, signal actuation and coordination. Transp. Res. Part C Emerg. Technol. 2014, 46, 65–82. [Google Scholar] [CrossRef]
- Hu, J.; Park, B.B.; Lee, Y.J. Coordinated transit signal priority supporting transit progression under Connected Vehicle Technology. Transp. Res. Part C 2015, 55, 393–408. [Google Scholar] [CrossRef]
- Ezawa, H.; Mukai, N. Adaptive Traffic Signal Control Based on Vehicle Route Sharing by Wireless Communication; Springer: Berlin/Heidelberg, Germany, 2010; pp. 280–289. [Google Scholar]
- Xiang, J.; Chen, Z. An adaptive traffic signal coordination optimization method based on vehicle-to-infrastructure communication. Cluster Comput. 2016, 19, 1–12. [Google Scholar] [CrossRef]
- Tomescu, O.; Moise, I.M.; Stanciu, A.E.; Batros, I. Adaptive Traffic Light Control System Using Ad Hoc Vehicular Communications Network. UPB Sci. Bull. 2012, 74, 67–78. [Google Scholar]
- Hobeika, A.G.; Kim, T. Assessment of certain applications of Vehicle-to-Vehicle communication in an urban network. Wit Trans. Built Environ. 2014, 138, 405–417. [Google Scholar]
- Sommer, C.; German, R.; Dressler, F. Bidirectionally Coupled Network and Road Traffic Simulation for Improved IVC Analysis. IEEE Trans. Mob. Comput. 2010, 10, 3–15. [Google Scholar] [CrossRef]
- PTV Group. VISSIM 5.40: User Manual; PTV Group: Karlsruhe, Germany, 2011. [Google Scholar]
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent Development and Applications of SUMO—Simulation of Urban MObility. Int. J. Adv. Syst. Meas. 2012, 5, 128–138. [Google Scholar]
- Wang, S.Y.; Lin, C.C. NCTUns 5.0: A Network Simulator for IEEE 802.11(p) and 1609 Wireless Vehicular Network Researches. In Proceedings of the Vehicular Technology Conference—VTC 2008-Fall, Calgary, AB, Canada, 21–24 September 2008. [Google Scholar]
- Manual AIMSUN User. 6.1: Microsimulator and Mesosimulator in AIMSUN; Transport Simulation Systems: Barcelona, Spain, 2009. [Google Scholar]
- Wiering, M.; Vreeken, J.; Van Veenen, J.; Koopman, A. Simulation and optimization of traffic in a city. In Proceedings of the Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004. [Google Scholar]
- Guide, MATLAB User. The Mathworks; MathWorks Inc.: Natick, MA, USA, 1998. [Google Scholar]
- Jabbarpour, M.R.; Zarrabi, H.; Khokhar, R.H.; Shamshirband, S.; Choo, K.K.R. Applications of computational intelligence in vehicle traffic congestion problem: A survey. Soft Comput. 2017. [Google Scholar] [CrossRef]
- Yang, K. A Reinforcement Learning Based Traffic Signal Control Algorithm in a Connected Vehicle Environment. In Proceedings of the 17th Swiss Transport Research Conference (STRC 2017), Ascona, Switzerland, 17–19 May 2017. [Google Scholar]
- Fagnant, D.J.; Kockelman, K.M. Dynamic Ride-Sharing and Optimal Fleet Sizing for a System of Shared Autonomous Vehicles. In Proceedings of the Transportation Research Board Annual Meeting, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- Fagnant, D.J.; Kockelman, K.M. Dynamic ride-sharing and fleet sizing for a system of shared autonomous vehicles in Austin, Texas. Transportation 2016. [Google Scholar] [CrossRef]
- Truong, L.T.; De Gruyter, C.; Currie, G.; Delbosc, A. Estimating the trip generation impacts of autonomous vehicles on car travel in Victoria, Australia. Transportation 2017, 1–14. [Google Scholar] [CrossRef]
- Woodard, M.; Sedigh, S. Modeling of Autonomous Vehicle Operation in Intelligent Transportation Systems. In Proceedings of the International Workshop on Software Engineering for Resilient Systems, Kiev, Ukraine, 3–4 October 2013. [Google Scholar]
- Dresner, K.; Stone, P. Multiagent Traffic Management: A Reservation-Based Intersection Control Mechanism. In Proceedings of the International Joint Conference on Autonomous Agents and Multiagent Systems, Utrecht, The Netherlands, 25–29 July 2005. [Google Scholar]
- Hausknecht, M.; Au, T.C.; Stone, P. Autonomous Intersection Management: Multi-intersection optimization. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Lee, J.; Park, B. Development and Evaluation of a Cooperative Vehicle Intersection Control Algorithm under the Connected Vehicles Environment. IEEE Trans. Intell. Transp. Syst. 2012, 13, 81–90. [Google Scholar] [CrossRef]
- Li, Z.; Elefteriadou, L.; Ranka, S. Signal control optimization for automated vehicles at isolated signalized intersections. Trans. Res. Part C 2014, 49, 1–18. [Google Scholar] [CrossRef]
Figure 1.
The flowchart of systematic review process.
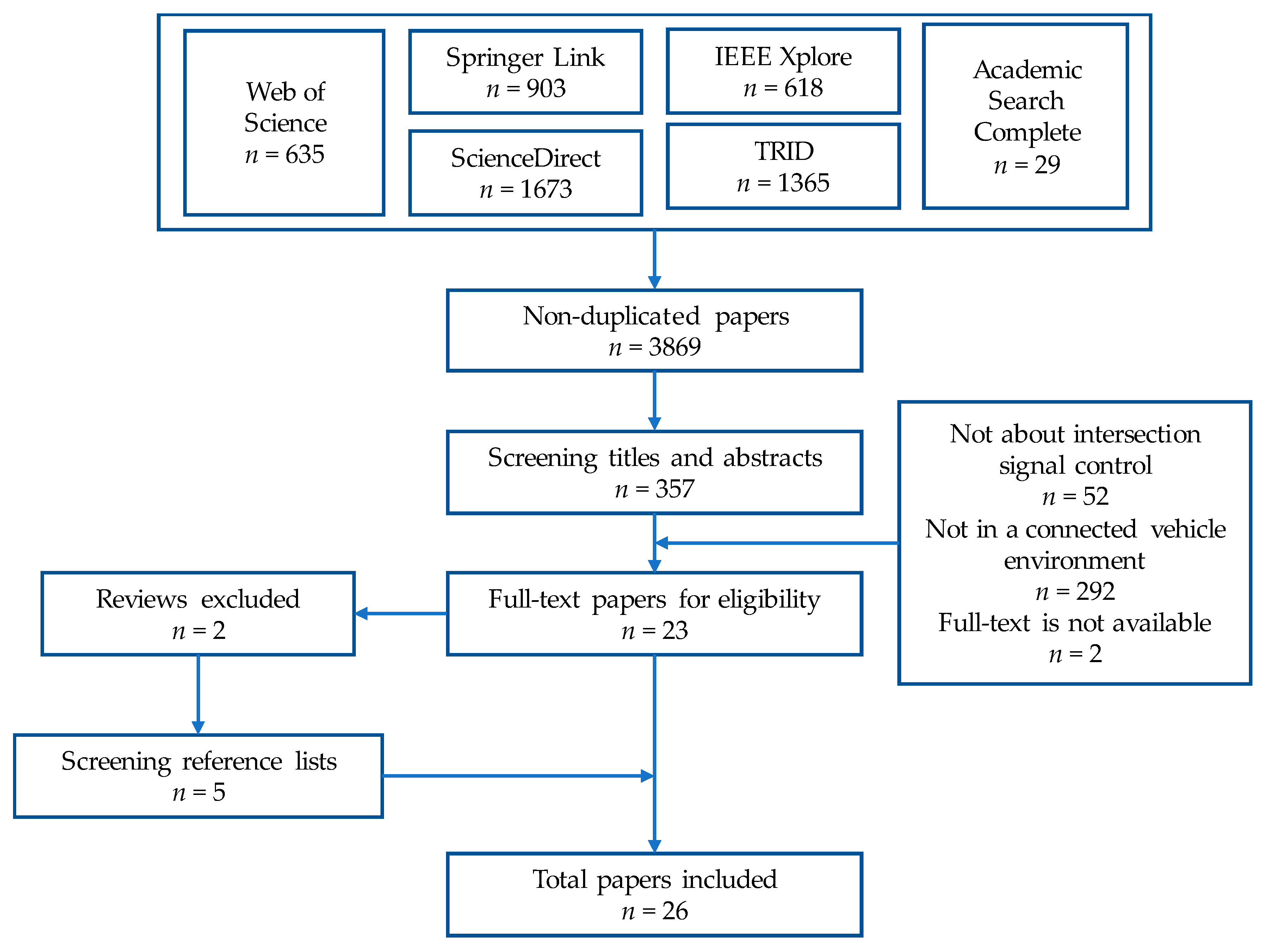
Figure 2.
The framework of adaptive traffic signal control in a connected vehicle environment.

{kind=link}
{kind=link}
Table 1.
Checklist for evaluating studies’ quality.
| Criteria | Description | Score |
|---|---|---|
| Assessing methodology quality | 0–3 | |
| Estimation of the equipped vehicle status | Included | 1 |
| Not Included | 0 | |
| Number of the objective function | More than 2 | 1 |
| Less than 2 | 0 | |
| Applied range of the method | For an isolated intersection | 0 |
| For coordinated intersections | 1 | |
| Assessing simulation and simulation result quality | 2–7 | |
| Simulation testing | Testing | 2 |
| Not testing | 1 | |
| Simulation data source | Field | 1 |
| Hypothetical | 0 | |
| Simulation scenario | Field | 1 |
| Hypothetical | 0 | |
| Penetration rate of CV | 100% | 1 |
| Not 100% | 2 | |
| Comparison of simulation results | Included | 1 |
| Not Included | 0 | |
Table 2.
Summary of studies included in this systematic review.
| Leader Author (year) | Country | Journal | Method | Objective Functions | Penetration Rate | Data Resource | Simulation Scenario | Simulation Platform |
|---|---|---|---|---|---|---|---|---|
| Islam S.M.A.B.A. 2017 | USA | Transportation Research Part C: Emerging Technologies | a Distributed-Coordinated methodology | 1. the queue length 2. the throughput | - | Hypothetical | Hypothetical | VISSIM |
| Liu W. 2017 | China | IEEE Transactions on Vehicular Technology | a reinforcement learning-based traffic control that integrates V2X networks’ dynamic clustering algorithm. | 1. the throughput 2. the average waiting time | - | - | Field | SUMO NS-3 |
| Cheng J. 2017 | China | IEEE Transactions on Industrial Informatics | a fuzzy group-based intersection control | the average waiting time | - | Hypothetical | Hypothetical | NS-3 |
| Shaghaghi E. 2017 | Malaysia | Frontiers of Information Technology & Electronic Engineering | an adaptive green traffic signal controlling using vehicular communications (AGTSC-VC) | 1. the vehicle waiting time 2. the pollutant emission | - | - | Field | Veins |
| Younes M.B. 2016 | Canada | IEEE Transactions on Vehicular Technology | an intelligent traffic light controlling algorithm and an arterial traffic light controlling algorithm | 1. the delay 2. the throughput | - | Hypothetical | Hypothetical | SUMO NS-2 |
| Xiang J. 2016 | China | Cluster Computing | a multi-agent based control method | the total travel time | - | Field | Field | VISSIM |
| Hu J. 2015 | USA | Transportation Research Part C: Emerging Technologies | a person-delay-based optimization method for TSP | the delay | - | Field | Field | VISSIM-COM |
| Feng Y. 2015 | USA | Transportation Research Part C: Emerging Technologies | a real-time adaptive phase allocation algorithm | 1. the total vehicle delay 2. the queue length | 100%, 75%, 50%, 25% | Field | Field | VISSIM-COM |
| Tiaprasert K. 2015 | USA | IEEE Transactions on Intelligent Transportation Systems | a queue length estimation based adaptive signal control | the queue length | 80%, 50%, 10% | - | - | VISSIM |
| Guler S.I. 2014 | Switzerland | Transportation Research Part C: Emerging Technologies | an intersection traffic control algorithm | 1. the total delay 2. the total number of stop | 100–0% | Hypothetical | Hypothetical | MATLAB |
| He Q. 2014 | USA | Transportation Research Part C: Emerging Technologies | a multi-modal traffic signal control | the delay | - | Field | Field | VISSIM-COM |
| Kari D. 2014 | USA | IEEE on Intelligent Transportation Systems Conference | an agent-based online adaptive signal control (ASC) strategy | 1. the travel delay 2. the fuel consumption | - | - | - | SUMO |
| Lee J. 2013 | USA | Journal of Transportation Engineering, | a cumulative travel-time responsive (CTR) field-time intersection control algorithm | 1. the total delay time 2. the average speed | 100%, 90%, 70%, 50%, 30%, 10% | Hypothetical | Hypothetical | VISSIM-COM |
| Goodall N. 2013. | USA | Transportation Research Record Journal of the Transportation Research Board | a predictive microscopic simulation algorithm (PMSA) | the delay or a combination of delay, stops and decelerations | 100%, 50%, 25%, 10% | Field | Field | VISSIM-COM |
| Pandit K. 2013 | USA | IEEE Transactions on Vehicular Technology | the oldest arrival first (OAF) algorithm | the average delay per vehicle | 100%, 90%, 70%, 50%, 30% | - | - | SUMO OMNET++ (Veins) |
| Maslekar N. 2013 | France | Journal of Network & Computer Applications | an adaptive traffic signal system based on car-to-car communication | 1. the average waiting time 2. the queue length | - | - | Field | NCTUns |
| Cai C. 2013 | Australia | IET Intelligent Transport Systems | a vehicle-to-infrastructure communication-based adaptive control’ (VICAC) method | the travel time | - | Hypothetical | Hypothetical | Commuter |
| Ahmane M. 2013 | France | Transportation Research Part C: Emerging Technologies | a model based on Timed Petri Nets with Multipliers | the queue length | - | Field | Field | Video 2 |
| Chang H.J. 2013 | Republic of Korea | Ad Hoc Networks | a method of queue length estimation | 1. the average junction waiting time 2. the total queue length | - | Hypothetical | Hypothetical | GLD |
| Nafi N.S. 2012 | Australia | Telecommunication Networks and Applications Conference | a new Intelligent Road Traffic Signaling System (IRTSS) system | the average waiting time | - | Hypothetical | Hypothetical | OPNET Modeler |
| He Q. 2012 | USA | Transportation Research Part C: Emerging Technologies | a unified platoon-based mathematical formulation | 1. the throughput 2. the average delay | 100%, 80%, 60%, 40%, 20% | Field | Field | VISSIM-COM |
| Chou L. 2012 | Taiwan | 12th International Conference on ITS Telecommunications | a passenger-based traffic signal mechanism | 1. the vehicle delay 2. the stop times 3. the passenger delay | - | Hypothetical | Hypothetical | NCTUns |
| Tomescu O. 2012 | Romania | U.P.B. Sci. Bull | a new adaptive traffic light system and a new traffic light green-wave control algorithm | 1. the stop times 2. the delay | - | Hypothetical | Hypothetical | MATLAB |
| Ezawa H. 2010 | Japan | Springer Berlin Heidelberg | a new control system for traffic signals by vehicle route sharing | the average delay time | - | Hypothetical | Field | Artisoc |
| Priemer C. 2009 | Germany | Intelligent Transportation Systems | a decentralized adaptive traffic signal control algorithm | the total queue length | 100%, 50%, 33%, 25%, 20%, 17%, 14%, 12%, 10%. | Field | Field | AIMSUN NG |
| Gradinescu V. 2007 | Romania | IEEE Vehicular Technology Conference-vtc-spring | an adaptive traffic light system | the total average delay | - | Field | Field | Ns-2 and Jist/SWANS VISSIM |
Table 3.
Summary of methods of adaptive traffic signal control utilized in selected papers.
| Leader Author (year) | Method/Algorithm | Consideration | Traffic Signal Controller Mechanisms | Objective Functions | |
|---|---|---|---|---|---|
| Traffic Data Gathering | Schedule Technique | ||||
| Islam S.M.A.B.A, 2017 | A Distributed-Coordinated methodology | 2 and 9 intersections | Connected vehicle | Distributed coordinated signal timing | Minimizing queue length and maximizing throughput and reducing travel time |
| Liu W. 2017 | A reinforcement learning traffic control scheme | 3 intersections | V2X networks | Cooperative RL-based signal control algorithm | Improving traffic throughput and reducing average waiting time |
| Cheng J. 2017 | Fuzzy group-based intersection control | Isolated intersection | Vehicular Ad Hoc Networks | Vehicle grouping based traffic control | Reducing the waiting time |
| Shaghaghi E. 2017 | AGTSC-VC | 36 intersections | Vehicular Ad Hoc Networks | Density-based and priority-based traffic signal timing | Decreasing the vehicle waiting time and pollutant emission |
| Younes M B. 2016 | ITLC algorithm/ATL controlling algorithm | Isolated intersection | Vehicular Ad Hoc Networks | An intelligent traffic light controlling algorithm | Minimizing the delay and improving the throughput |
| Xiang J. 2016 | Multi-agent based control method | 22 intersections | Vehicle-to-infrastructure communication | Traffic signal co-learning optimization algorithm | Reducing average travel time, the average delay and the average queue length |
| Hu J. 2015 | A person-delay-based optimization method for TSP | 2 consecutive intersections | Connected vehicle | TSPCV-C | Reducing bus delay |
| Feng Y. 2015 | Phase allocation algorithm | Isolated intersection | Connected vehicle | DP based control algorithm | Minimizing total vehicle delay or queue length |
| Tiaprasert K. 2015 | Queue-based ASC | Isolated intersection | Connected vehicle | Queue based traffic control | Minimizing the queue length |
| Guler S.I. 2014 | An intersection traffic control algorithm | Isolated intersection | Connected vehicle | Discharging sequence based traffic control | Minimizing total delay and total number of stops |
| He Q. 2014 | Multi-modal traffic signal control | 2 intersections | Connected vehicle | Mixed integer linear program | Reducing the delay |
| Kari D. 2014 | Agent-based online ASC | Isolated intersection | Connected vehicle | Flexible traffic light state machine | Reducing the travel delay and the fuel consumption |
| Lee J. 2013 | CTR | Isolated intersection | Connected vehicle | Travel-time responsive control algorithm | Improving the total delay time and the average speed |
| Goodall N. 2013. | PMSA | 4 intersections | Connected vehicle | Predictive microscopic simulation algorithm | Minimizing the delay |
| Pandit K. 2013 | OAF | Isolated intersection | Vehicular Ad Hoc Networks | On-line Scheduling Algorithm | Minimizing the delay |
| Maslekar N. 2013 | CATS | 7 intersections | Clustering Vehicular Ad Hoc Networks | Density-based adaptive traffic signal timing | Reducing the waiting time and queue length |
| Cai C. 2013 | VICAC | Isolated intersection | Vehicle-to-infrastructure Communication | Travel-time based control algorithm | Reducing the travel time |
| Ahmane M. 2013 | A model based on TPNM | Isolated intersection | Cooperative vehicle | TPNM based traffic control | Minimizing the queue length |
| Chang H.J. 2013 | A method of queue length estimation | Isolated intersection | Vehicular Ad Hoc Networks | A dual ring configuration control | Reducing average junction waiting time and queue length |
| Nafi N S. 2012 | IRTSS | Isolated intersection | Vehicular Ad Hoc Networks | An adaptive IRTSS | Reducing the average waiting time |
| He Q. 2012 | PAMSCOD | 8 intersections | Probe data | Mixed integer linear program | Improving the throughput and reducing the average delay |
| Chou L. 2012 | PATSC | Isolated intersection | Vehicle-to-infrastructure Communication | Passenger-based adaptive traffic signal control | Reducing vehicle delay, stop times and passenger delay |
| Tomescu O. 2012 | A new adaptive TLC | 3 adjacent intersections | Vehicular Ad Hoc Networks | Traffic signal green-wave strategy | Reducing the stop number and delay |
| Ezawa H. 2010 | Vehicle route sharing based ASC | 62 intersections | Wireless Communication | ETC based control algorithm | Minimizing the average delay |
| Priemer C. 2009 | Decentralized adaptive traffic signal control | Signalized and unsignalized intersections | Vehicle-to-infrastructure Communication | DP&CE based optimization algorithm | Reducing the total queue length |
| Gradinescu V. 2007 | Adaptive Traffic Light | Isolated Intersection | Vehicular Ad Hoc Networks | Modified Webster’s formula | Minimizing the average delay |
Table 4.
Summary of simulation platform and basic description in the selected papers.
| Simulation Platform | Country | Introduction | Property | Frequency |
|---|---|---|---|---|
| Veins [53] | Germany | Veins is a framework for running vehicular network simulations. It is based on two well-established simulators: OMNeT++ and SUMO. | Open source | 2 |
| VISSIM [54] | Germany | VISSIM is a microscopic, time step and behavior based simulation model developed to model urban traffic and public transit operations. It is possible to automate certain tasks in VISSIM by executing COM (component object model) commands from an external program. | Commercial | 9 |
| SUMO [55] | Germany | “Simulation of Urban MObility” (SUMO) is a microscopic and continuous road traffic simulation package designed to handle large road networks. | Open source | 3 |
| NCTUns [56] | Taiwan | NCTUns is a network simulation and traffic simulation software, NCTUns has more realistic and credible experimental results, and can directly use the existing network software to reduce the workload of the design of the experimental environment. | Open source | 2 |
| AIMSUN NG [57] | Spain | Aimsun is traffic modelling software that allows you to model anything from a single bus lane to an entire region. It is used to improve road infrastructure, reduce emissions, cut congestion and design urban environments for vehicles and pedestrians. | Commercial | 1 |
| GLD simulator [58] | Netherlands | Green Light District (GLD) simulator is a Java-based traffic simulator that enables road/intersection design and allows the expansion of source codes. | Open source | 1 |
| MATLAB [59] | USA | MATLAB is a high-level technical computing language and interactive environment for algorithm development, data visualization, data analysis and numerical computation, including MATLAB and Simulink. | Commercial | 2 |
Table 5.
Distribution of quality characteristics across reviewed studies.
| Criteria | Description | Score | N of Studies | Percentage |
|---|---|---|---|---|
| Assessing methodology quality | ||||
| Estimation of the equipped vehicle status | Included | 1 | 3 | 11.54% |
| Not Included | 0 | 23 | 88.46% | |
| Number of the objective function | More than 2 | 1 | 14 | 53.85% |
| Less than 2 | 0 | 12 | 46.15% | |
| Applied range of the method | For coordinated intersection | 1 | 12 | 46.15% |
| For an isolated intersection | 0 | 14 | 53.85% | |
| Assessing simulation and simulation result quality | ||||
| Simulation testing | Testing | 2 | 26 | 100.00% |
| Not testing | 1 | 0 | 0.00% | |
| Simulation data source | Field | 1 | 9 | 45.00% |
| Hypothetical | 0 | 11 | 55.00% | |
| Simulation scenario | Field | 1 | 13 | 56.52% |
| Hypothetical | 0 | 10 | 43.47% | |
| Penetration rate of CV | Not 100% | 2 | 8 | 30.77% |
| 100% | 1 | 18 | 69.23% | |
| Comparison of simulation results | Included | 1 | 25 | 96.15% |
| Not Included | 0 | 1 | 3.85% | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Jing, P.; Huang, H.; Chen, L. An Adaptive Traffic Signal Control in a Connected Vehicle Environment: A Systematic Review. Information 2017, 8, 101. https://doi.org/10.3390/info8030101
AMA Style
Jing P, Huang H, Chen L. An Adaptive Traffic Signal Control in a Connected Vehicle Environment: A Systematic Review. Information. 2017; 8(3):101. https://doi.org/10.3390/info8030101
Chicago/Turabian StyleJing, Peng, Hao Huang, and Long Chen. 2017. "An Adaptive Traffic Signal Control in a Connected Vehicle Environment: A Systematic Review" Information 8, no. 3: 101. https://doi.org/10.3390/info8030101
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.