Developing an Ontology-Based Rollover Monitoring and Decision Support System for Engineering Vehicles


School of Mechanical Science and Engineering, Jilin University, Changchun 130022, China
*
Author to whom correspondence should be addressed.
Information 2018, 9(5), 112; https://doi.org/10.3390/info9050112
Submission received: 2 April 2018
/
Revised: 27 April 2018
/
Accepted: 28 April 2018
/
Published: 4 May 2018
(This article belongs to the Section Information Systems)
Abstract
:The increasing number of rollover accidents of engineering vehicles has attracted close attention; however, most researchers focus on the analysis and monitoring of rollover stability indexes and seldom the assessment and decision support for the rollover risk of engineering vehicles. In this context, an ontology-based rollover monitoring and decision support system for engineering vehicles is proposed. The ontology model is built for representing monitored rollover stability data with semantic properties and for constructing semantic relevance among the various concepts involved in the rollover domain. On the basis of this, ontology querying and reasoning methods based on the Simple Protocol and RDF Query Language (SPARQL) and Semantic Web Rule Language (SWRL) rules are utilized to realize the rollover risk assessment and to obtain suggested measures. PC and mobile applications (APPs) have also been developed to implement the above methods. In addition, five sets of rollover stability data for an articulated off-road engineering vehicle under different working conditions were analyzed to verify the accuracy and effectiveness of the proposed system.
1. Introduction
Engineering vehicles’ rollover is a serious threat to production and highway safety that may result in traffic delays and accidents, causing serious injuries and deaths. In recent years, rollover accidents have presented a rising tendency, particularly in the United States, where the total reaches approximately 35,000 annually [1]. Therefore, it is urgent that a rollover monitoring and decision support system is developed for engineering vehicles to avoid rollover accidents.
In the past years, a number of studies on engineering vehicles’ rollover monitoring and warning systems have been conducted. This research on engineering vehicles’ rollover mainly covers two domains: the analysis of rollover stability indexes, and rollover stability data monitoring. Xuefei Li et al. [2] established a 7-degrees-of-freedom dynamic model based on the Lagrange equation to analyze the lateral stability and instability mechanism of an articulated wheel loader. A scaled wheel loader was designed and manufactured to validate the lateral stability indexes under two conditions, namely, turning on slopes and passing over obstacles. Ya Wu et al. [3] took wheel loaders as the research object to examine the rollover instability mechanism and stability indexes of articulated steering vehicles. J. Liu et al. [4] conducted tests on three radio-controlled tractors to analyze the rollover stability indexes of off-road vehicles. Debopam Acharya et al. [5] used wireless channels to dispatch necessary information to design and develop an emergency event notification system for vehicles that might rollover. Haiqing Li et al. [6] used an improved predictive lateral load transfer ratio (LTR) as the rollover index and realized real-time calculation and monitoring through an 8-degrees-of-freedom nonlinear vehicle model. Carpenter, E.G. [7] proposed an emergency warning system for a rollover vehicle through the monitoring of rollover indexes using sensors. Zhu Tianjun et al. [8] developed a rollover warning system for heavy-duty vehicles on the basis of improved time-to-rollover algorithm. Inspired by previous work, the lateral acceleration and roll angular velocity are selected as two rollover stability indexes in this paper, and they are real-time monitored by developed PC and mobile applications (APPs).
Little work has been done in terms of comprehensive assessment and decision support for the rollover risk of engineering vehicles. Scientific and reasonable rollover risk assessment methods could help users to better understand the monitored rollover data. Moreover, decision support for rollover risk could inform users of suggested anti-rollover measures.
Ontology is the solution to achieve assessment and decision support for the rollover risk of engineering vehicles. Ontology, as a shared concept, is a mechanism that describes concepts and their system relationships [9,10]. As the basis of semantic knowledge, ontology can make concepts, vocabularies, attributes, and other knowledge of the domain semantically, which enables the computer to easily understand and integrate the knowledge, thus realizing the sharing and reuse of engineering vehicles’ rollover knowledge [11,12].
With the development of knowledge technology, ontology has been applied into many assessment and decision support systems. Yu-Jun Wang et al. [13] introduced an ontology-based cold-chain logistics monitoring and decision system that provided users with decision support for monitored cold-chain quality. Xiao-Ci Huang et al. [14,15] proposed an approach for ontology modeling that could be used in evaluating river water quality and achieving decision support for the water quality through analyzing and reasoning. A.S. Niaraki et al. [16] developed a personalized route-planning system by using a multi-criteria decision-making approach based on ontology. P.D. Haghighi et al. [17] focused on intelligent decision support based on ontology for the medical emergency management of mass gatherings. J. Garrido et al. [18] described a proposal of ontology for environmental impact assessment to establish a conceptual framework. Shao-li Chen et al. [19] built the ontology-based disassembly knowledge model and then used case- and rule-based reasoning to realize automated decision-making for the disassembly of mechanical products. Mahmud Abdulla Mohammad et al. [20] presented an ontology-based framework for the assessment of risk in unpredictable road traffic environments using videos. Sebastian Scheuer et al. [21] proposed new and innovative Web Ontology Language (OWL) ontology for flood risk assessment. Edward Corry et al. [22] conducted research on performance assessment based on ontology for the environmental and energy management of buildings.
At present, the ontology that represents monitored rollover stability data with semantic properties and that constructs semantic relevance among the various concepts involved in the rollover domain does not exist. To fill up this gap, an ontology model is built to realize rollover monitoring and decision support.
In this paper, an engineering vehicles’ rollover system is proposed that contains data (lateral acceleration and roll angular velocity) monitoring, rollover risk assessment, and decision support. On the basis of the ontology model, the monitored data can obtain semantic properties, and complex relationships between the concepts in the rollover domain can be represented. Furthermore, the ontology querying and reasoning methods based on the Semantic Web Rule Language (SWRL) rules and Simple Protocol and RDF Query Language (SPARQL) are used to realize rollover risk assessment and decision support. Particularly, the PC and mobile APPs have also been developed to implement the above rollover monitoring and decision support system.
The rest of this paper is organized as follows: Section 2 presents the overall structure of the engineering vehicles’ rollover monitoring and decision support system; Section 3 focuses on the ontology-based rollover assessment and decision support method; Section 4 presents the development of the PC and mobile APPs; Section 5 gives the system validation; the final section presents the conclusions.
2. The Framework of the Rollover Monitoring and Decision Support System
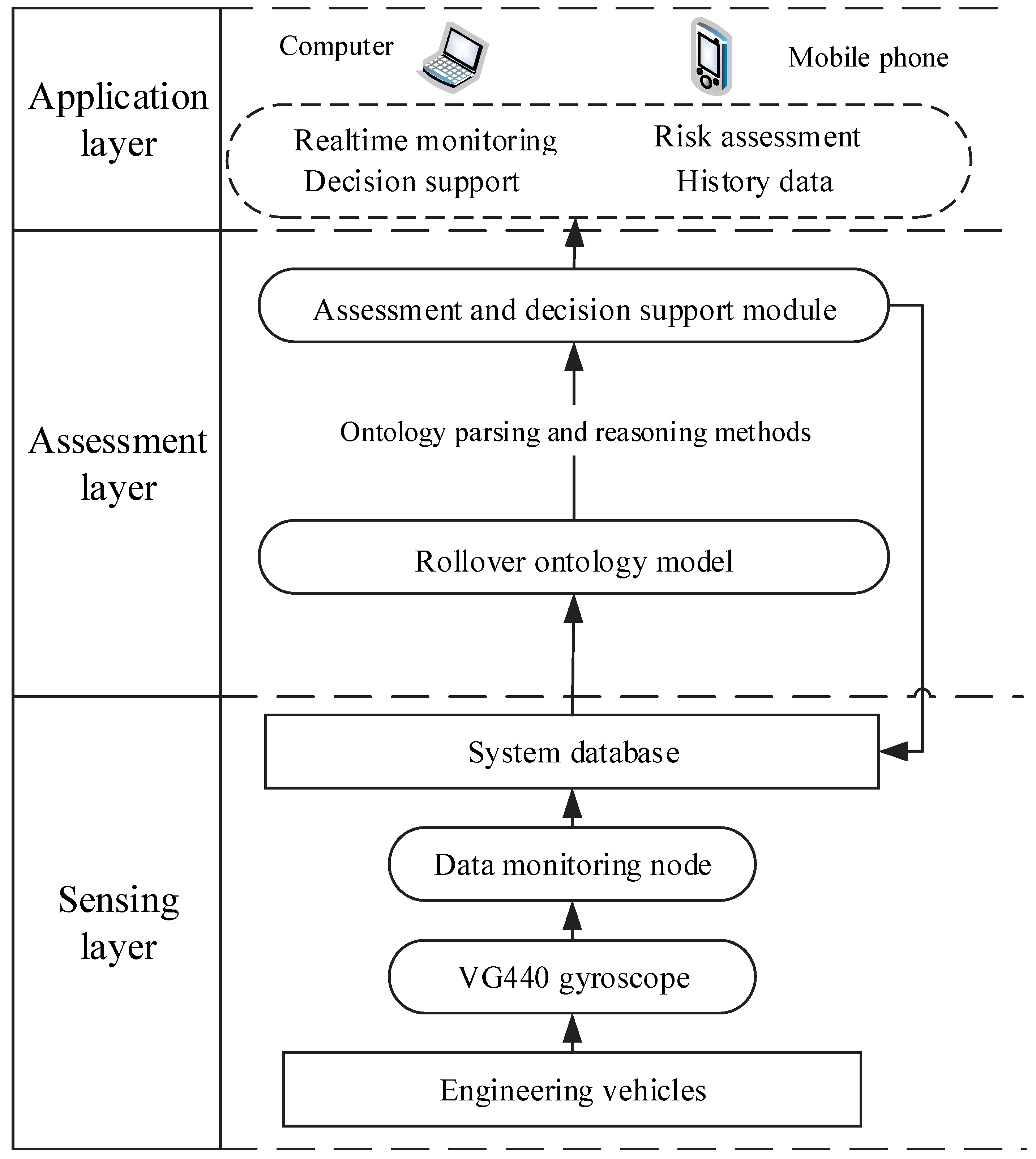
As shown in Figure 1, the rollover monitoring and decision support system consists of three layers: a sensing layer, a decision support layer, and an application layer.
The sensing layer, mainly used for collecting and transmitting running data of engineering vehicles, consists of a VG440 gyroscope and data monitoring node. The VG440 gyroscope integrates gyroscopes and accelerometers and is able to collect the pitch angle, roll angle, lateral angle, 3-axis acceleration, and 3-axis angular velocity. It is a vertical gyroscope system based on Micro-Electro-Mechanical System (MEMS) devices. In this paper, the rollover data (lateral acceleration and roll angular velocity) collected by the VG440 gyroscope are transmitted to the system database through a 3G communication module of the data monitoring node.
The decision support layer, established on the basis of the ontology model, is mainly used for rollover risk assessment and decision support. The monitored data in the system database is transformed to a specification description given by the rollover ontology model, and then the threshold values of the data are queried using the SPARQL. After this, the rollover risk assessment and decision support for the suggested measures are obtained by an ontology reasoning method based on SWRL rules and using a Jena reasoning machine.
The application layer is responsible for developing the PC and mobile APPs, which can provide users (including drivers, administrators, and public safety department) with the monitoring of rollover stability indexes, rollover risk assessment levels, decision support for the suggested measures, and a query of history data.
3. Ontology-Based Rollover Assessment and Decision Support Method
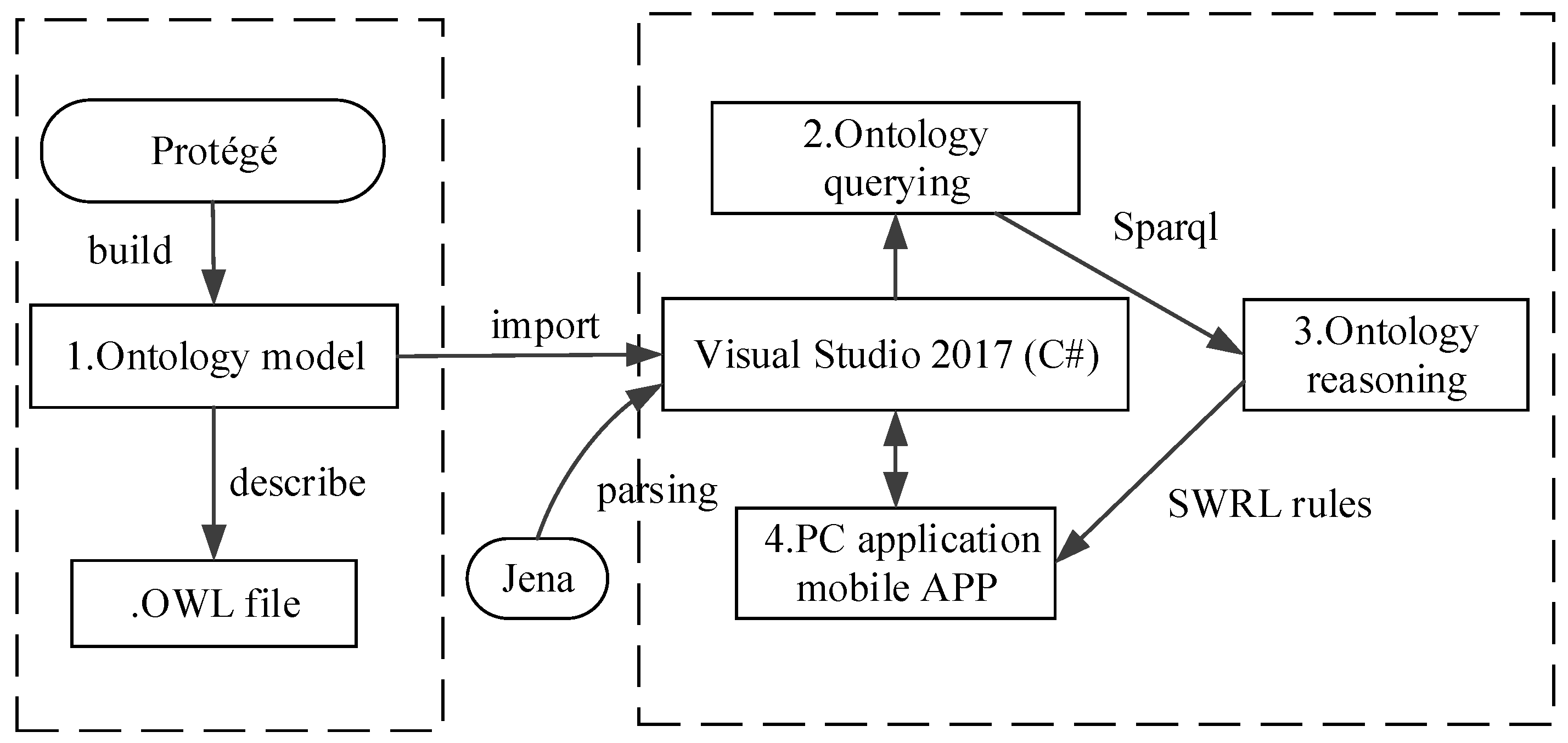
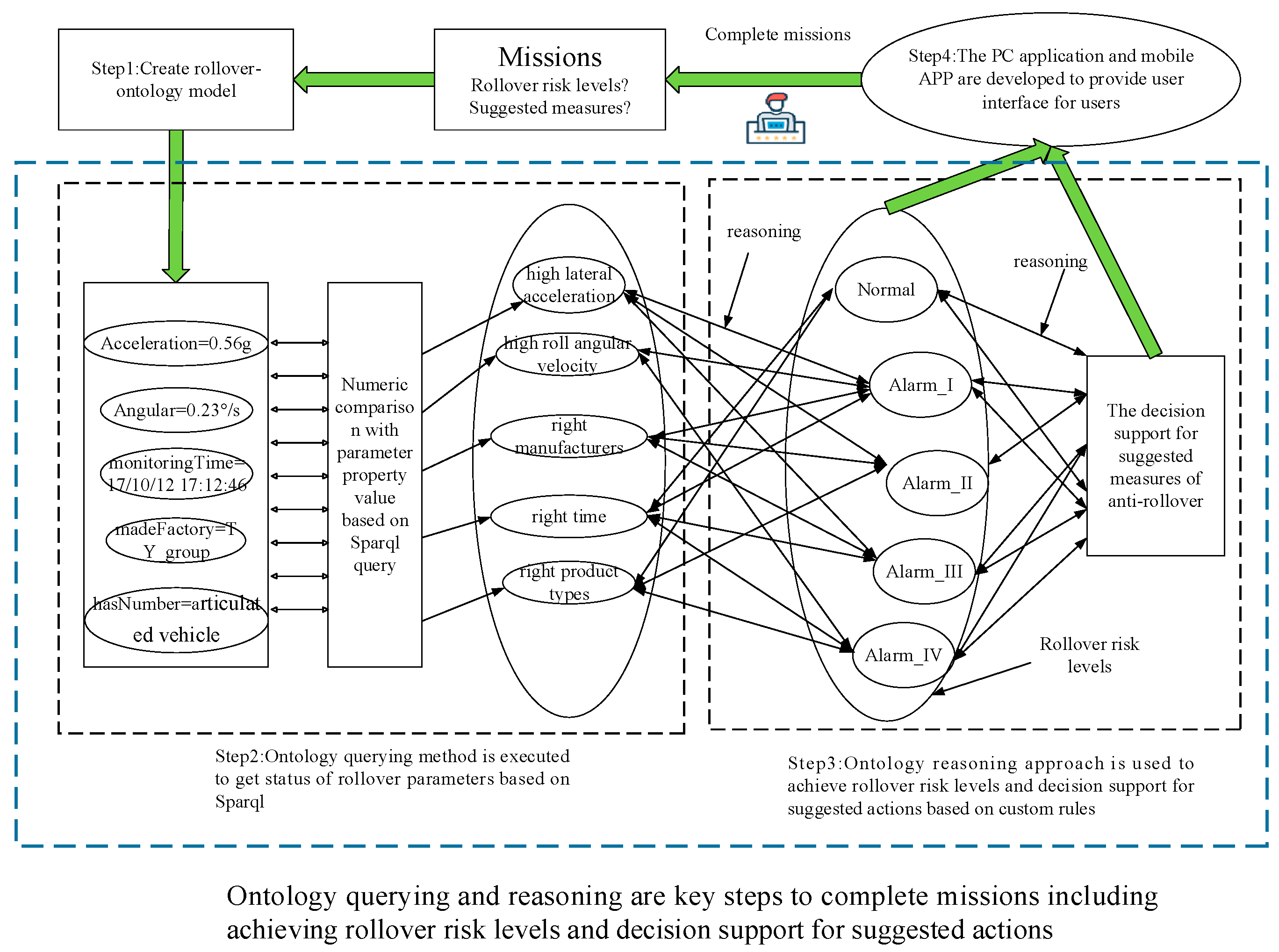
This paper makes full use of ontology to process the related rollover information semantically. Then, knowledge querying and reasoning methods based on the established ontology model are executed to achieve assessment and decision support for engineering vehicles’ rollover. The PC and mobile APPs can produce the final results. Shown in Figure 2 is the development flow of the ontology-based rollover assessment and decision support method.
3.1. Ontology-Based Knowledge Modeling Process
According to Figure 2, the ontology model is the core part of the rollover assessment and decision support method. Protégé [23] software was selected for building the rollover ontology model because of its friendly interface, powerful tools, and data-checking feature [24]. In the Protégé ontology editor, the ontology model is described as O=<C, OP, DP, I> [25,26], where C is the set of classes, OP is the set of object properties, DP is the set of data properties, and I is the set of instances.
● Define classes and class hierarchy:
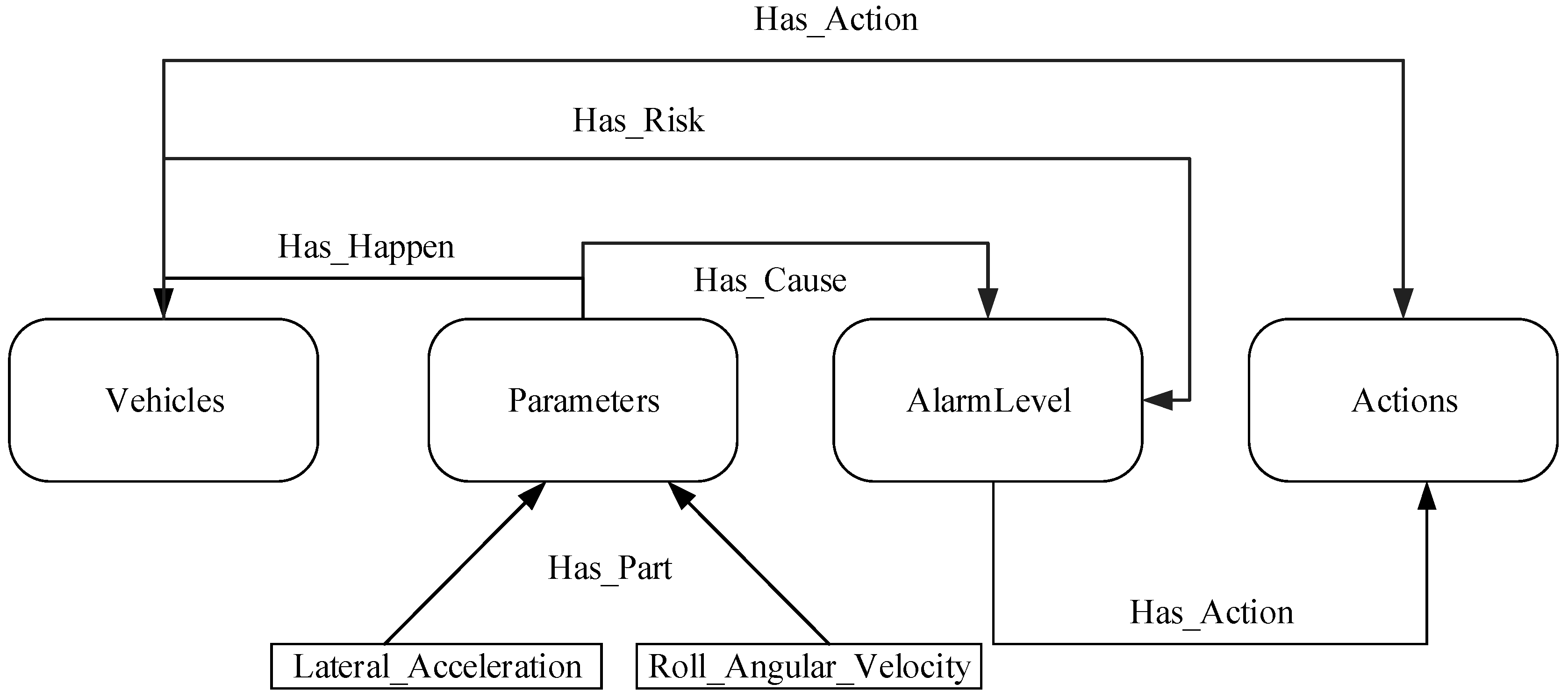
Classes that the rollover ontology model contain involve engineering vehicles (Vehicles), parameters (Parameters), risk assessment levels (AlarmLevel), and the decision support for recommended treatments (Actions). The two subclasses are included in the main class Parameters; they are the lateral acceleration (Lateral_Acceleration) and roll angular velocity (Roll_Angular_Velocity). These classes in the ontology model represent monitored rollover stability data with semantic properties.
● Define object properties:
As shown in Figure 3, the object properties can be used to build relationships between different classes in the ontology model. Has_Part represents the relationship between the Parameters class and its subclasses (Lateral_Acceleration and Roll_Angular_Velocity). The lateral acceleration and roll angular velocity jointly affect the rollover stability and are collected by the VG440 gyroscope installed in the engineering vehicles. When the engineering vehicle goes straight through the obstacle, its rollover stability can be measured mainly by the roll angular velocity; when the engineering vehicle turns on a horizontal road, the lateral acceleration has a great effect on the stability [3]. Active steering and active braking control are able to control these parameters, and then vehicle stability is controlled [3]. Has_Cause refers to the relationship between the Parameters class and AlarmLevel class. Has_Action indicates the relationship among the Vehicles, AlarmLevel, and Actions classes. Has_Happen represents the relationship between the Parameters and Vehicles classes. Has_Risk indicates the relationship between the Actions and Vehicles classes. The object properties of the ontology model construct the semantic relevance among the various concepts involved in the rollover domain.
● Define data properties:
As shown in Table 1, each data property has its corresponding domains and ranges. The data properties of the ontology model denote the monitored rollover stability data with semantic properties.
On the basis of these classes, data properties, object properties, “semantic properties” and “constructing the semantic relevance” in the rollover ontology model are achieved, and then all semantic rollover knowledge can be represented and interweaved together among various knowledge sources, which achieves the sharing and reusing of rollover risk knowledge. That is to say, semantic properties and constructing the semantic relevance are of great significance and contribute to the advantage of the ontology-based approach proposed in the introduction section: the sharing and reusing of rollover risk knowledge.
● Create instances:
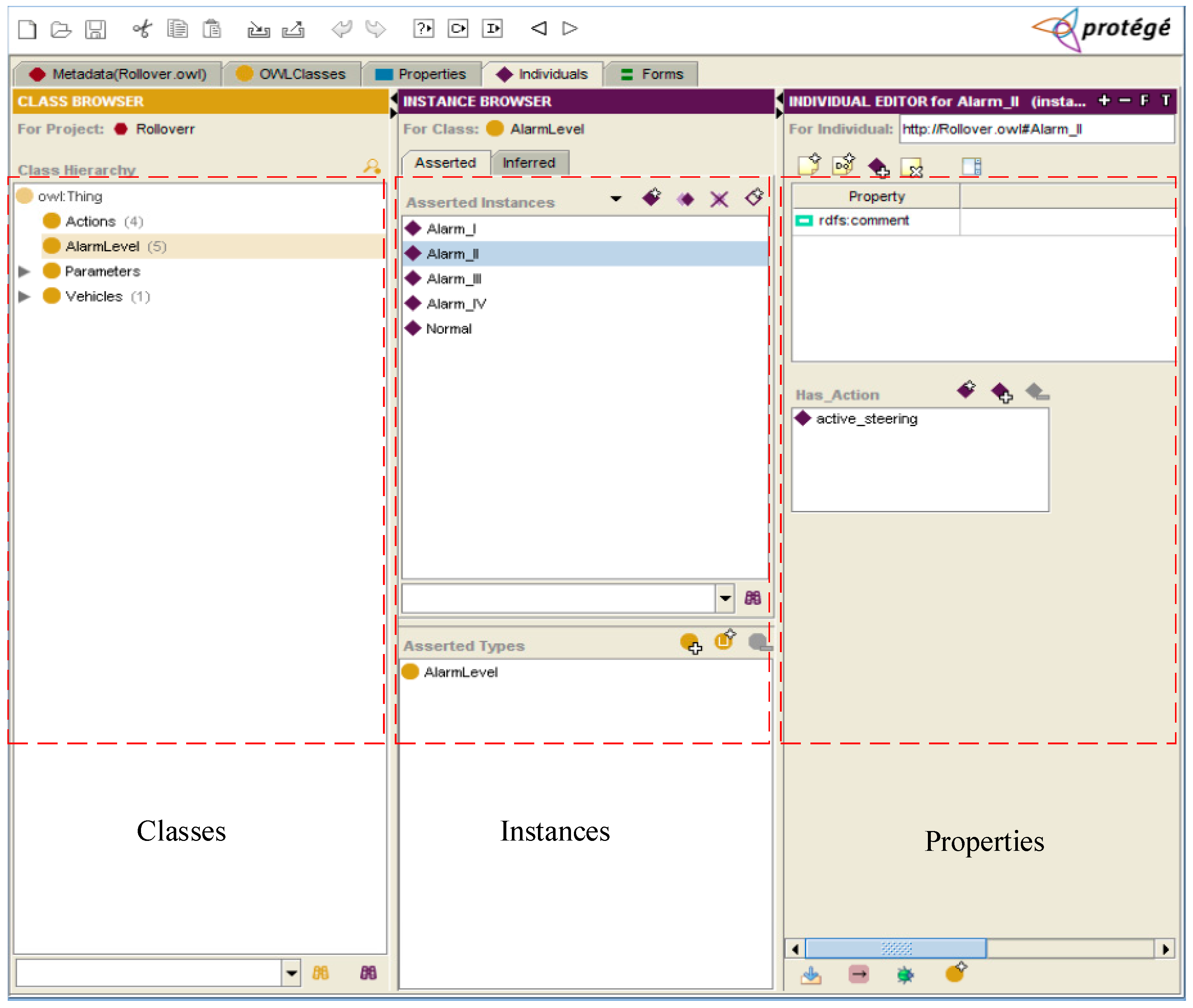
Five instances of AlarmLevel are created in this paper to represent different kinds of rollover risk assessment levels; they are the normal working level (Normal), first-class alarm level (Alarm_I), second-class alarm level (Alarm_II), third-class alarm level (Alarm_III), and fourth-class alarm level (Alarm_IV). For the subclasses Lateral_Acceleration and Roll_Angular_Velocity, both have three instances (Upper_Lateral_Acceleration, Normal_Lateral_Acceleration, and Lower_Lateral_Acceleration), which represent the upper and lower limits of the rollover stability indexes. The Vehicles class has an articulated_vehicle instance. The instances in class Actions are normal_driving, active_brake, active_steering, and stop_driving.
The rollover ontology model has thus been established. Protégé software was then used to build the rollover ontology model, as shown in Figure 4. Classes, instances, and properties are listed in order from the left to right of Figure 4. A pellet was used for checking exceptions to verify the correctness of the ontology model, and no abnormal situation occurred in the checking process. Hence, the rollover ontology model is correct and reasonable.
3.2. Ontology Querying and Reasoning Methods
The above rollover ontology model is the foundation for achieving assessment and decision support of engineering vehicles’ rollover. As shown in Figure 5, ontology querying and reasoning are the two key steps to realize the rollover risk assessment and decision support to recommend advice.
3.2.1. Ontology Querying Based on SPARQL
According to Figure 2, ontology parsing is the precondition of ontology querying, and it mainly includes the following three steps: Firstly, the Jena package is imported into the application Visual Studio 2017. Secondly, “createOntologyModel()” is used to instantiate the ontology model. Finally, the .owl document is read by the file stream. The parsing of the rollover ontology method has thus been achieved. Users can inquire about the information in the ontology based on SPARQL.
SPARQL [27] is a query language that enables the querying of information in the RDF model; however, it does not have a reasoning function, and thus this paper mainly uses its query function to obtain the data needed. The results of the SPARQL query are stored in a .txt file, and then they are read by the APP program.
SPARQL has four kinds of query forms: SELECT, CONSTRUCE, ASK, and DESCRIBE. The SELECT mode is chosen for querying the standard values of the rollover stability indexes in the rollover ontology model. After obtaining the information, the data collected from the gyroscope are compared with the queried values, and then the real-time statuses of the rollover stability indexes are achieved. Next, according to the custom rules based on the SWRL, the rollover risk assessment and decision support for recommended advice are realized.
3.2.2. Assessment and Decision Support of Rollover Risk on the Basis of Ontology Reasoning
In order to obtain the risk assessment and advised treatments for engineering vehicles’ rollover, a Jena reasoner based on the rollover ontology model is used as a tool for reasoning together with custom rules based on the SWRL.
On the basis of the analysis of classes and properties in the rollover ontology model, as shown in Table 2, the SWRL rules are constructed in this paper; these rules are the basis of the ontology reasoning. To understand SWRL easily, two basic elements of syntax are introduced, as follows:
- (1)
- C (? x): If x is an instance of the class C or is the value of its data property, then C (? x) is valid.
- (2)
- P (? x, y): If x and y are associated with the property P, then P (? x, y) is valid.
On the basis of the syntax mentioned above, rule1 is taken as an example to describe rollover rules. For example, if the vehicle is given by x, the parameter is given by y, y happens at x, and y can cause one of several different risk levels z (five instances of class AlarmLevel), then x has the risk level z.
The reasoner, on the basis of the rules above, can be created and combined with the instances in the rollover ontology model. Because rollover information with semantic properties and the semantic relevance among the various concepts have been defined in the rollover ontology model, the rollover risk assessment and decision support for suggested measures are the results of comprehensive consideration of the rollover ontology and SWRL rules mentioned above. The rollover risk assessment is deduced on the basis of rule1 and the Has_cause object property of the rollover ontology model. According to rule1, the rollover risk level mainly depends on instances of Parameters’ subclasses Roll_Angular_Velocity and Lateral_Acceleration. Roll_Angular_Velocity has three instances: Upper_Roll_Angular_Velocity represents that the engineering vehicle has a very serious rollover risk in a very bad operating environment; Normal_Roll_Angular_Velocity indicates that the engineering vehicle has a relatively general rollover risk; Lower_Roll_Angular_Velocity denotes that the engineering vehicle is not at rollover risk. Similarly, three instances of the class Lateral_Acceleration also represent different rollover risks. Instances of Lateral_Acceleration and Roll_Angular_Velocity are distinguished from their predefined thresholds, which are represented by data properties hasMaxValue and hasMinValue. Briefly, the data states of lateral acceleration and roll angular velocity can be used to reason the rollover risk level. Then, rule2 is triggered to reason advised treatments for the rollover risk according to the Has_cause and Has_action object properties. A different rollover risk level corresponds to a different suggested measure.
Ontology, as a shared concept model, can describe the objective world better with its own syntax. Complex relationships between different concepts in the rollover domain can be expressed in the ontology model. On the basis of the established rollover ontology model, SPARQL querying and Jena reasoning are combined to achieve the assessment and decision support for the rollover risk of engineering vehicles. Users can avoid the rollover of engineering vehicles through obtaining results from the PC and mobile APPs.
4. The Design of the PC and Mobile APPs
The PC and mobile APPs have been developed to provide a user interface (UI) for users including drivers, the administrator, and the public safety department. Only drivers can obtain their own engineering vehicles’ rollover risk levels and suggested measures. The administrator has superior authority to monitor and manage all engineering vehicles. The public safety department is responsible for monitoring the risk and rescuing the engineering vehicle once a rollover accident occurs. The PC and mobile APPs contain the following functional modules:
(1) Users’ management:
This includes adding or deleting users, editing user information, and setting user permissions. Only the administrator has the right to operate this functional module.
(2) Real-time monitoring and alarm:
This shows the real-time monitoring data to users. Once the monitoring data is abnormal, push notifications and a warning tone will be alerted.
(3) Decision support:
This provides users with ontology-based analysis results, which cover the rollover risk assessment levels and decision support for recommended actions.
(4) History query:
Users can query historical data, such as lateral acceleration and roll angular velocity. This function can not only trace the data and analysis results for when the rollover accident occurred, but it can also display a history data curve to inform users of the dynamic trend of the data.
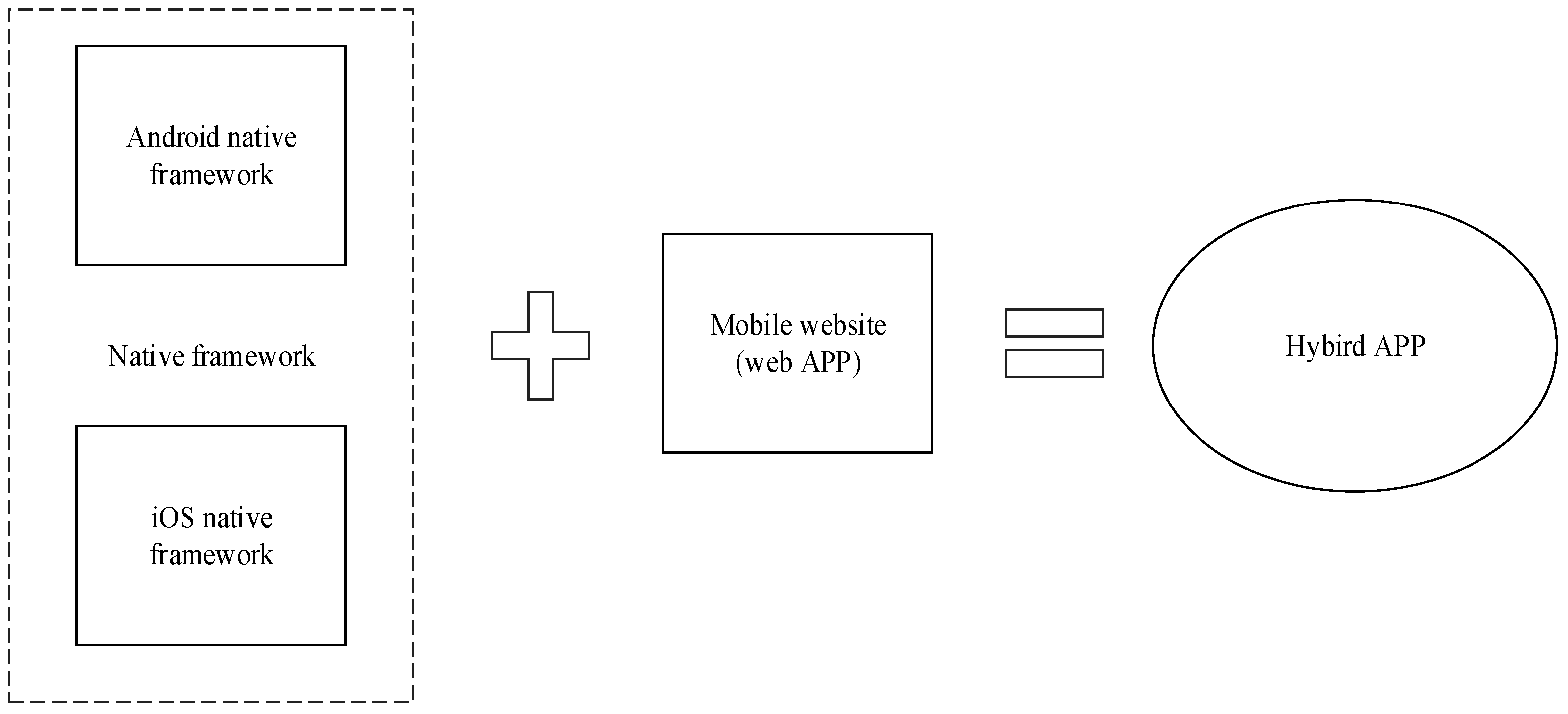
In order to monitor engineering vehicles’ rollover situations from anywhere at any time, the PC APP has been developed on the basis of the ASP.NET MVC Website development technology in the Visual Studio 2017 platform with the program language C#; thus users can conveniently use it through a browser. This paper applies hybrid APP development technology with excellent cross-platform characteristics for developing the android and iOS APPs.
As shown in Figure 6, the implementation of the hybrid APP is divided into two steps: developing native framework for Android and iOS, and mobile Website design. The native framework for Android is built using the Eclipse software, and the native framework for iOS is developed using the Xcode platform. The mobile Website is designed by ASP.NET MVC technology and the jQuery Mobile framework, which is suitable for developing front-end interfaces of mobile APPs.
5. Validation of Rollover Monitoring and Decision Support System
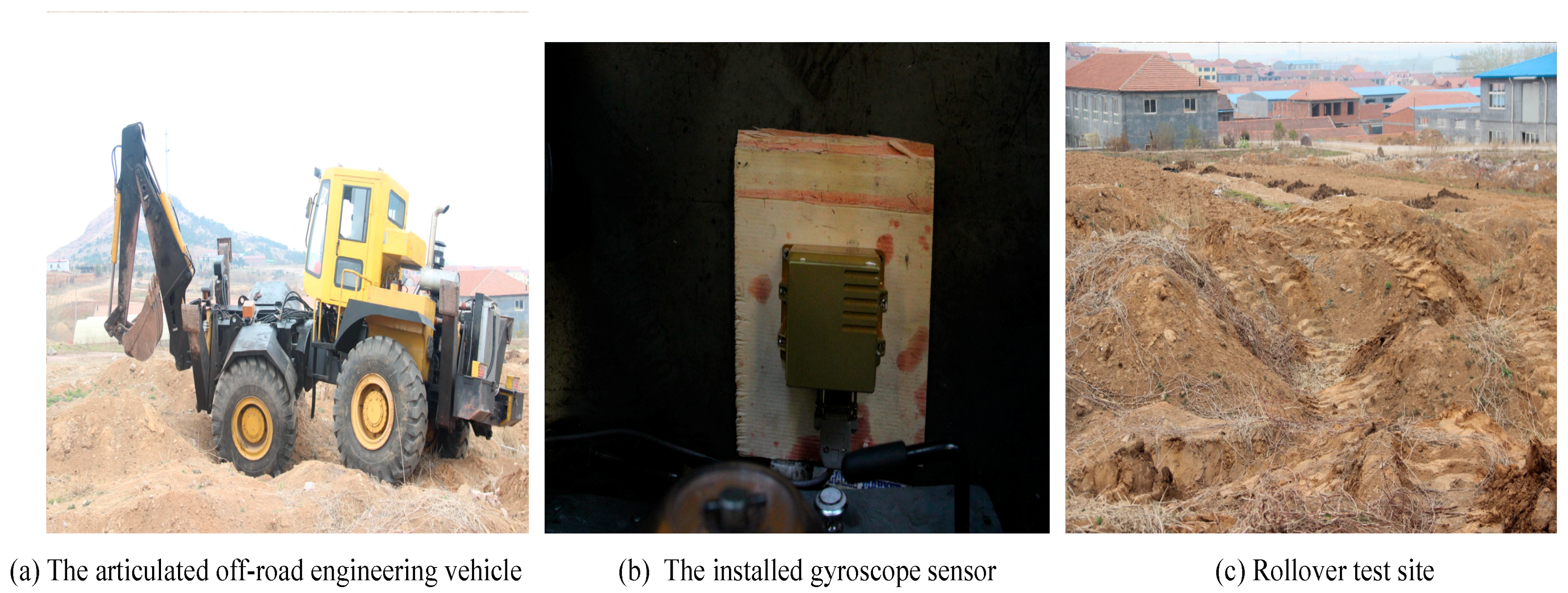
An articulated off-road engineering vehicle was taken as an example to verify the validation of the proposed system. The articulated off-road engineering vehicle, installed gyroscope sensor, and rollover test site are shown in Figure 7.
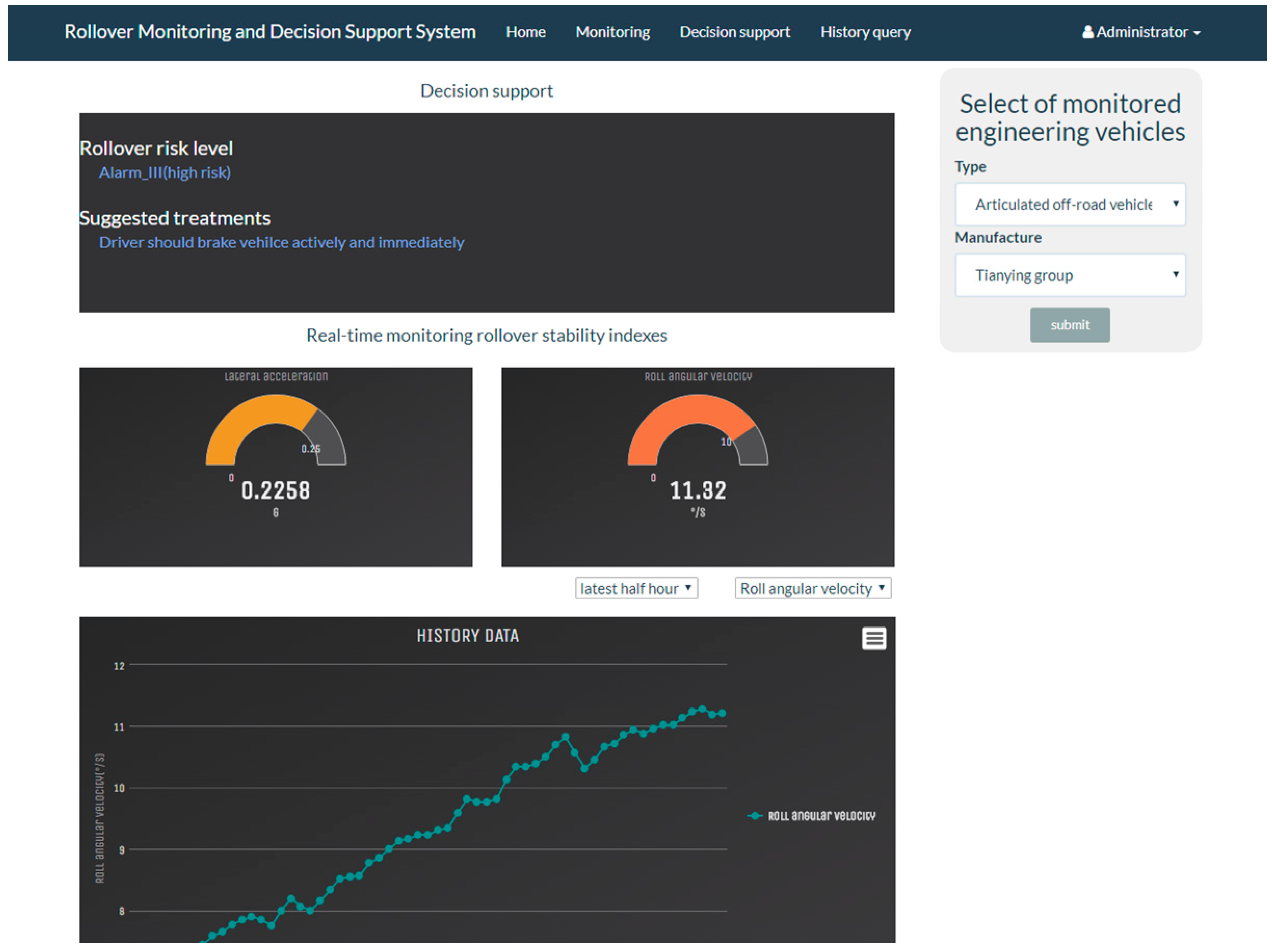
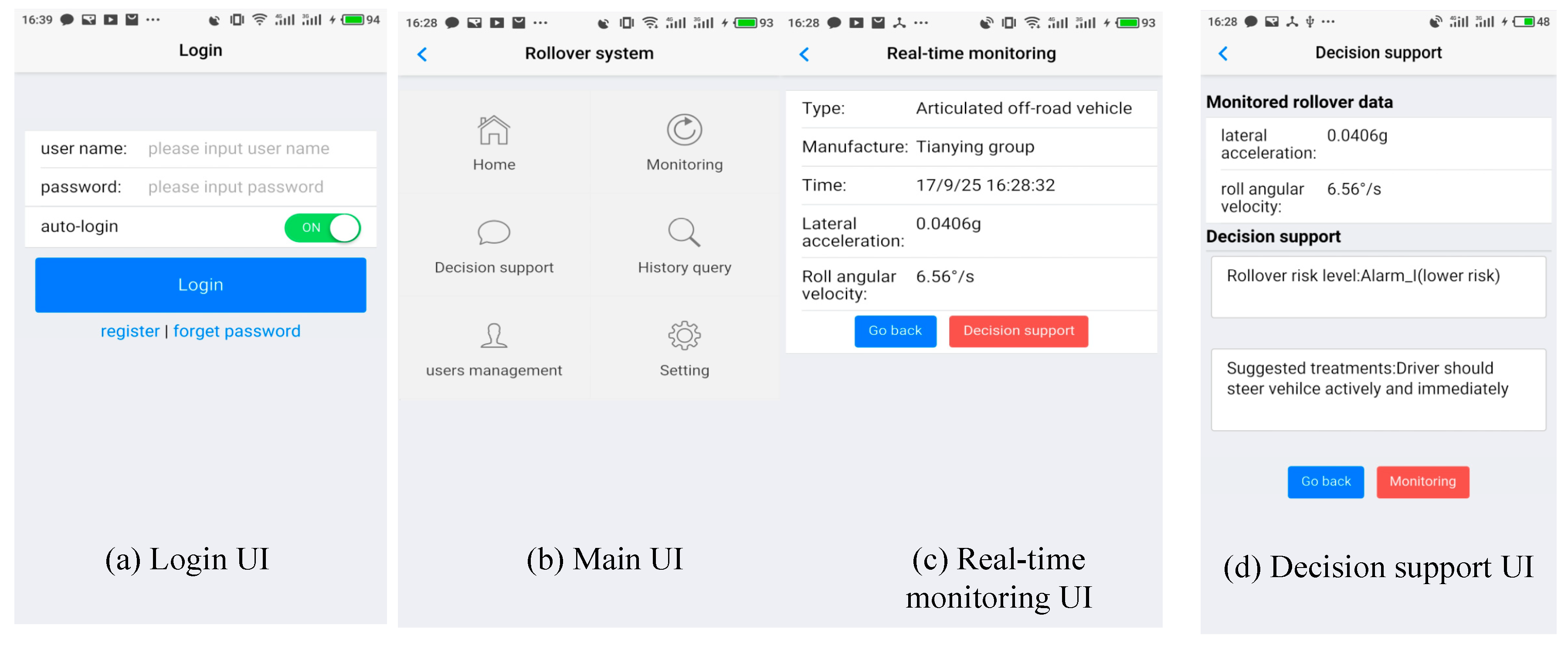
In order to validate the effectiveness of the proposed system, five sets of rollover stability data under different working conditions were imported into the PC and mobile APPs to achieve assessment and suggested advice for the rollover risk. The analysis results of sample D are shown from the PC APP in Figure 8. The analysis results of sample B are shown from the mobile Android APP in Figure 9. Figure 9a shows the login UI. After the user enters the username and password successfully, the mobile APP will jump to that shown in Figure 9b. Figure 9b shows the main UI, with which users can choose related functions (home page, data monitoring, decision support, user management, history query, and APP setting) according to personal preferences. Figure 9c monitors the rollover stability data of engineering vehicles and displays the vehicle type, vehicle manufacturer, monitoring time, lateral acceleration, and roll angular velocity. Figure 9d gives ontology-based analysis results, which contain risk assessment levels and suggested advice. As shown in Figure 9d, users can operate suggested actions to avoid vehicle rollover. The validation results show that the PC and mobile APPs work effectively and that users can monitor rollover data and obtain decision support conveniently.
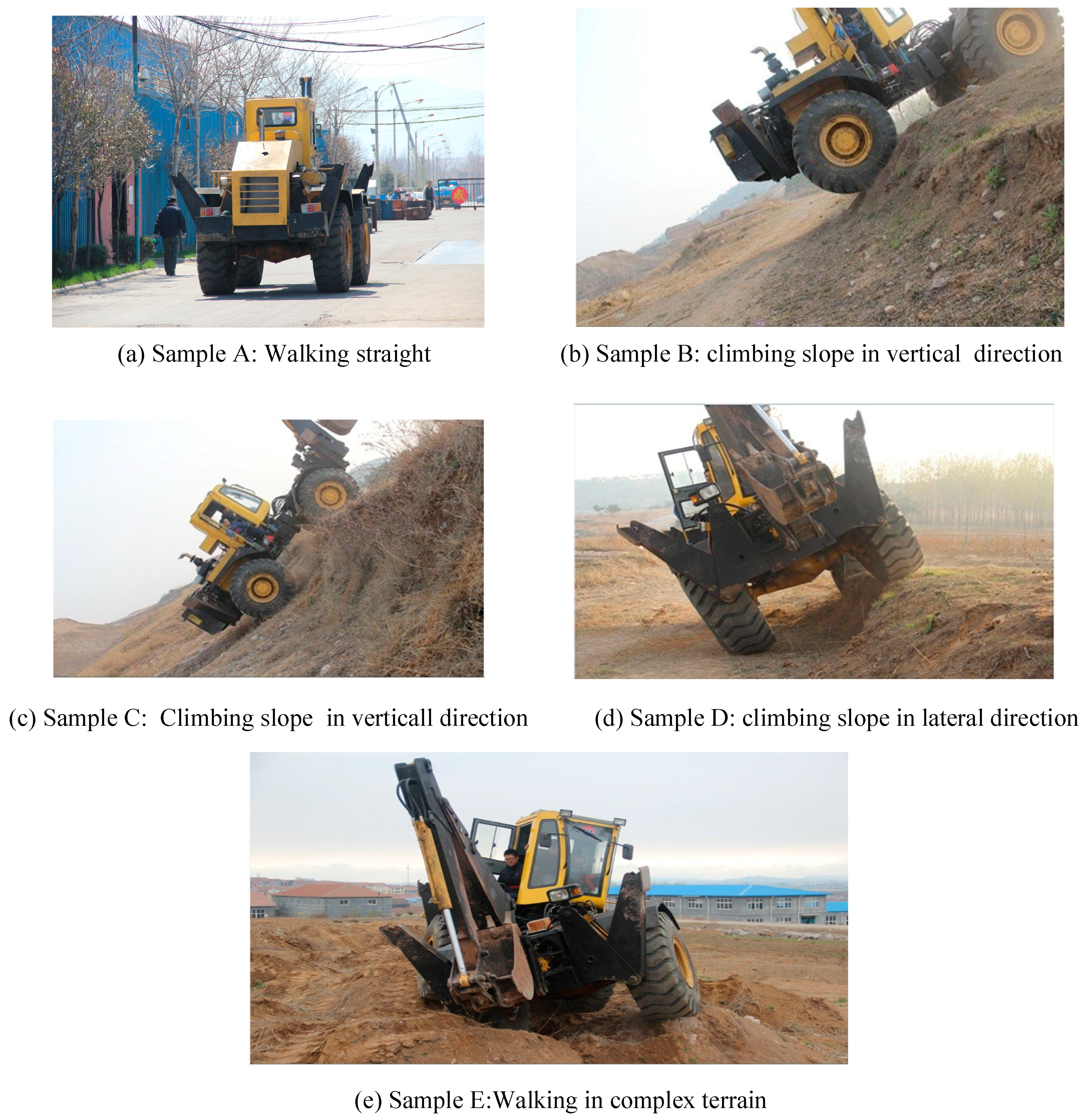
As shown in Figure 10, the different test working conditions corresponding to five sets of rollover data were as follows: walking straight, climbing a slope in the lateral direction, climbing a slope in the vertical direction, and walking in complex terrain. The five sets of rollover data and their ontology-based reasoning results, including suggested measures and rollover risk levels, are listed in Table 3.
6. Conclusions
This paper proposes a rollover monitoring and decision support system for engineering vehicles on the basis of ontology. In this system, the rollover ontology model is built for representing monitored rollover stability data with semantic properties and constructing the semantic relevance among the various concepts involved in the rollover monitoring domain. On the basis of this, ontology querying and reasoning are utilized to realize rollover risk assessment and obtain decision support for suggested measures. PC and mobile APPs have also been developed to implement the above system. In addition, five sets of rollover data under different working conditions were analyzed to verify the reliability of the proposed system. Compared with other related systems [5,6,7,8], the proposed rollover monitoring and decision support system has the following advantages:
- High flexibility and expandability. The ontology model in our proposed system can express various rollover stability indexes of all engineering vehicles with different granularity. Moreover, the classes, properties, individuals in the ontology model, and reasoning rules can be continually updated and enhanced. Hence, the ontology-based method presented in this paper is highly expansible, can be used to develop a rollover monitoring and decision support system for all kinds of engineering machinery, and even has the potential to be applied in water quality monitoring and fire monitoring.
- Knowledge integration and sharing. In our paper, ontology not only enables the computer to easily understand and integrate knowledge, but it also eliminates the ambiguity and heterogeneity of concept expression. Further, all represented knowledge can be interweaved together in the ontology model, which achieves the sharing and reusing of rollover knowledge. Such shared and reused rollover knowledge not only saves research resources, but it is also helpful to provide a knowledge basis for developers.
- Manages conveniently. In our work, the PC and mobile APPs have been developed to provide a unified platform for users including drivers, the administrator, and the public safety department. Users can monitor the rollover situation and obtain decision support effectively only via the Internet. Consequently, the model is not only good for enhancing the rollover management’s efficiency, but it contributives to rollover information shared by corporations and the government.
However, some aspects in this paper still need to be perfected and improved upon in the future; these are shown below.
- (1)
- Rollover reasoning rules and monitored parameters need to be further added to obtain more detailed and useful decision results, such as specific steering angle, steering direction, braking time, and so forth.
- (2)
- The network condition may be poor because of relatively remote working sites of the engineering vehicle. In this context, the data monitoring node cannot transfer rollover data to the system database, and the PC and mobile APPs will be unable to work properly. In the future, an ontology-based reasoning APP that is equipped with liquid crystal display (LCD) will be inserted into the data monitoring node to inform drivers of the decision results when the network has no signal.
- (3)
- Drivers may not be able to execute suggestions of the ontology-based decision results accurately and rapidly; thus, the anti-rollover controller will be developed in the next step. In this way, the decision results in this paper can feedback the controller, and then the controller can actively control engineering vehicles to avoid rollover.
- (4)
- The main purpose of this paper is to apply ontology technology to solve the problems of rollover monitoring and decision making, but it neglects the application of relevant algorithms to obtain a more reasonable and accurate risk level. This paper only judges the rollover risk level on the basis of data states of parameters, and the related algorithm will be used to calculate the rollover risk level in the future.
Author Contributions
Feixiang Xu and Chen Zhou designed the proposed ontology-based method; Feixiang Xu built the ontology model in the rollover domain; Feixiang Xu and Chen Zhou conducted the experiments; Chen Zhou analyzed the data in the experiments; Fexiang Xu developed the PC and mobile APPs; Feixiang Xu wrote the manuscript; Feixiang Xu and Xinhui Liu revised the manuscript.
Acknowledgments
This paper is supported by the Nature Science Fund of China (NSFC) under Grant No. 51405187, the National High Technology Research and Development Program 863 under Grant No. 2007AA04Z208, and the Industry–University Research Collaboration Project “Development of wheeled off-road engineering vehicle for complex unstructured terrain” under Grant No. 2012220101000057.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hyun, D.; Langari, R. Modeling to Predict Rollover Threat of Tractor-Semitrailers. Veh. Syst. Dyn. 2003, 39, 401–414. [Google Scholar] [CrossRef]
- Li, X.; Wang, G.; Yao, Z.; Yang, Y. Research on Lateral Stability and Rollover Mechanism of Articulated Wheel Loader. Math. Comput. Model. Dyn. Syst. 2014, 20, 248–263. [Google Scholar] [CrossRef]
- Li, X.; Wu, Y.; Zhou, W.; Yao, Z. Study on Roll Instability Mechanism and Stability Index of Articulated Steering Vehicles. Math. Probl. Eng. 2016, 2016, 1–15. [Google Scholar] [CrossRef]
- Liu, J.; Ayers, P.D. Off-road Vehicle Rollover and Field Testing of Stability Index. J. Agric. Saf. Health 1999, 5, 59–71. [Google Scholar] [CrossRef]
- Acharya, D.; Kumar, V.; Gaddis, G.M. A Mobile System for Detecting and Notifying Vehicle Rollover Events. In Proceedings of the 15th International Conference on Advanced Computing and Communications, Assam, India, 18–21 December 2007; pp. 268–273. [Google Scholar]
- Li, H.; Zhao, Y.; Wang, H.; Lin, F. Design of an Improved Predictive LTR for Rollover Warning Systems. J. Braz. Soc. Mech. Sci. Eng. 2017, 39, 3779–3791. [Google Scholar] [CrossRef]
- Carpenter, E.G. System and Method for Providing Emergency Warnings for a Rollover Vehicle. U.S. Patent US20080291003A1, 2011. [Google Scholar]
- Zhu, T.; Zong, C.; Wu, B.; Sun, Z. Rollover Warning System of Heavy Duty Vehicle Based on Improved TTR Algorithm. J. Mech. Eng. 2011, 47, 88–94. [Google Scholar] [CrossRef]
- Elhdad, R.; Chilamkurti, N.; Torabi, T. An Ontology-based Framework for Process Monitoring and Maintenance in Petroleum Plant. J. Loss Prev. Process Ind. 2013, 26, 104–116. [Google Scholar] [CrossRef]
- Verstichel, S.; Ongenae, F.; Loeve, L.; Vermeulen, F.; Dings, P.; Dhoedt, B.; Dhaene, T.; Turck, F.D. Efficient Data Integration in the Railway Domain through an Ontology-based Methodology. Transp. Res. Part C 2011, 19, 617–643. [Google Scholar] [CrossRef] [Green Version]
- Chira, O.; Chira, C.; Roche, T.; Tormey, D.; Brennan, A. An Agent-based Approach to Knowledge Management in Distributed Design. J. Intell. Manuf. 2006, 17, 737–750. [Google Scholar] [CrossRef]
- Panetto, H.; Dassisti, M.; Tursi, A. ONTO-PDM: Product-driven Ontology for Product Data Management Interoperability within Manufacturing Process Environment. Adv. Eng. Inform. 2012, 26, 334–348. [Google Scholar] [CrossRef]
- Wang, Y.; Yi, J.; Zhu, X.; Luo, J.; Ji, B. Developing an Ontology-Based Cold Chain Logistics Monitoring and Decision System. J. Sens. 2015, 2015, 1–8. [Google Scholar] [CrossRef]
- Huang, X.; Yi, J.; Chen, S.; Zhu, X. A Wireless Sensor Network-based Approach with Decision Support for Monitoring Lake Water Quality. Sensors 2015, 15, 29273–29296. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.; Yi, J.; Huang, X.; Chen, S. An Ontology-based Knowledge Modelling Approach for River Water Quality Monitoring and Assessment. In Proceedings of the 20th International Conference on Knowledge Based and Intelligent Information and Engineering Systems, York, UK, 5–7 September 2016; pp. 335–344. [Google Scholar]
- Niaraki, A.S.; Kim, K. Ontology based Personalized Route Planning System Using a Multi-criteria Decision Making Approach. Expert Syst. Appl. 2009, 36, 2250–2259. [Google Scholar] [CrossRef]
- Haghighi, P.D.; Burstein, F.; Zaslavsky, A.; Arbon, P. Development and Evaluation of Ontology for Intelligent Decision Support in Medical Emergency Management for Mass Gatherings. Decis. Support Syst. 2013, 54, 1192–1204. [Google Scholar] [CrossRef]
- Garrido, J.; Requena, I. Proposal of Ontology for Environmental Impact Assessment: An Application with Knowledge Mobilization. Expert Syst. Appl. 2011, 38, 2462–2472. [Google Scholar] [CrossRef]
- Chen, S.; Yi, J.; Jiang, H.; Zhu, X. Ontology and CBR Based Automated Decision-making Method for the Disassembly of Electromechanical Products. Adv. Eng. Inform. 2016, 30, 564–584. [Google Scholar] [CrossRef]
- Mohammad, M.A.; Kaloskampis, I.; Hicks, Y.; Setchi, R. Ontology-based Framework for Risk Assessment in Road Scenes Using Videos. In Proceedings of the 19th International Conference on Knowledge Based and Intelligent Information and Engineering Systems, Singapore, 7–9 September 2015; pp. 1532–1541. [Google Scholar]
- Scheuer, S.; Haase, D.; Meyer, V. Towards a Flood Risk Assessment Ontology—Knowledge Integration into a Multi-criteria Risk Assessment Approach. Comput. Environ. Urban Syst. 2013, 37, 82–94. [Google Scholar] [CrossRef]
- Corry, E.; Pauwels, P.; Hu, S.; Keane, M.; O’Donnell, J. A Performance Assessment Ontology for the Environmental and Energy Management of Buildings. Autom. Constr. 2015, 57, 249–259. [Google Scholar] [CrossRef]
- Ion, S.; Bogdan, I. Source Code Plagiarism Detection Method Using Protégé Built Ontologies. Inform. Econ. J. 2013, 17, 75–86. [Google Scholar]
- Alderfer, C.P. Clarfying the Meaning of Mentor—Protégé Relationships. Consult. Psychol. J. Pract. Res. 2014, 66, 6–19. [Google Scholar] [CrossRef]
- Yang, D.; Miao, R.; Wu, H.; Zhou, Y. Product Configuration Knowledge Modeling Using Ontology Web Language. Expert Syst. Appl. 2009, 36, 4399–4411. [Google Scholar] [CrossRef]
- Yang, D.; Dong, M.; Miao, R. Development of a Product Configuration System with an Ontology-based Approach. Comput.-Aided Des. 2008, 40, 863–878. [Google Scholar] [CrossRef]
- Shekarpour, S.; Auer, S.; Ngomo, A.-C.N.; Gerber, D.; Hellmann, S.; Stadler, C. Generating SPARQL Queries Using Templates. Web Intell. Agent Syst. 2013, 11, 283–295. [Google Scholar]
Figure 1.
The framework of rollover monitoring and decision support system.

Figure 2.
The development flow of ontology-based rollover assessment and decision support method.

Figure 3.
Object properties’ relationships in the ontology model.

Figure 4.
Rollover ontology model built using the Protégé software.

Figure 5.
Technical route of ontology querying and reasoning.

Figure 6.
Hybrid application (APP) implementation steps.

Figure 7.
Rollover test devices and site.

Figure 8.
Analysis results of sample D in the PC application (APP).

Figure 9.
Analysis results of sample B in the mobile Android application (APP).

Figure 10.
Five sets of rollover tests under different working conditions.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Data properties in the rollover ontology model.
| No. | Data Property | Domains | Ranges | Description |
|---|---|---|---|---|
| 1 | hasMaxValue | Parameters | float | Indicate maximum value of parameters in the normal range |
| 2 | hasMinValue | Parameters | float | Indicate minimum value of parameters in the normal range |
| 3 | monitoringTime | Parameters | datetime | Record monitoring time of parameters |
| 4 | madeFactory | Vehicles | string | Indicate manufacturers of engineering vehicles |
| 5 | hasNumber | Vehicles | string | Record product types of monitored engineering vehicles |
Table 2.
Rollover reasoning rules.
| No. | Rule |
|---|---|
| rule1 | Vehicles (? x) ^ Parameters (? y) ^ Has_Happen (? y, ? x) ^ Has_Cause (? y, ? z)—>Has_Risk (? x, ? z) |
| rule2 | Vehicles (? x) ^ Parameters (? y) ^ Has_Happen (? y, ? x) ^ Has_Cause (? y, ? z) ^ Has_Action (? z, ? m)—>Has_Action (? x, ? m) |
Table 3.
Monitoring parameter values and ontology-based analysis results.
| Parameter | Sample A | Sample B | Sample C | Sample D | Sample E |
|---|---|---|---|---|---|
| Lateral acceleration (g) | 0.0006 | 0.0406 | 0.2094 | 0.2258 | 0.2948 |
| Roll angular velocity (°/s) | 0.02 | 6.56 | 8.44 | 11.32 | 12.98 |
| Monitoring time | 17/9/23 14:46:39 | 17/9/25 16:28:32 | 17/9/26 09:05:27 | 17/9/28 11:10:55 | 17/9/27 17:20:43 |
| Type | Articulated off-road vehicle | Articulated off-road vehicle | Articulated off-road vehicle | Articulated off-road vehicle | Articulated off-road vehicle |
| Manufacturer | Tianying group | Tianying group | Tianying group | Tianying group | Tianying group |
| Rollover risk level | Normal | Alarm_I | Alarm_II | Alarm_III | Alarm_IV |
| Suggested treatments | Normal driving | Active steering | Active steering | Active braking | Stop driving |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Xu, F.; Liu, X.; Zhou, C. Developing an Ontology-Based Rollover Monitoring and Decision Support System for Engineering Vehicles. Information 2018, 9, 112. https://doi.org/10.3390/info9050112
AMA Style
Xu F, Liu X, Zhou C. Developing an Ontology-Based Rollover Monitoring and Decision Support System for Engineering Vehicles. Information. 2018; 9(5):112. https://doi.org/10.3390/info9050112
Chicago/Turabian StyleXu, Feixiang, Xinhui Liu, and Chen Zhou. 2018. "Developing an Ontology-Based Rollover Monitoring and Decision Support System for Engineering Vehicles" Information 9, no. 5: 112. https://doi.org/10.3390/info9050112
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.