
Statistical Contact Angle Analyses with the High-Precision Drop Shape Analysis (HPDSA) Approach: Basic Principles and Applications

Abstract
:
1. Introduction and Brief Summary of Basic Wetting Theories
2. Basic Principles of HPDSA
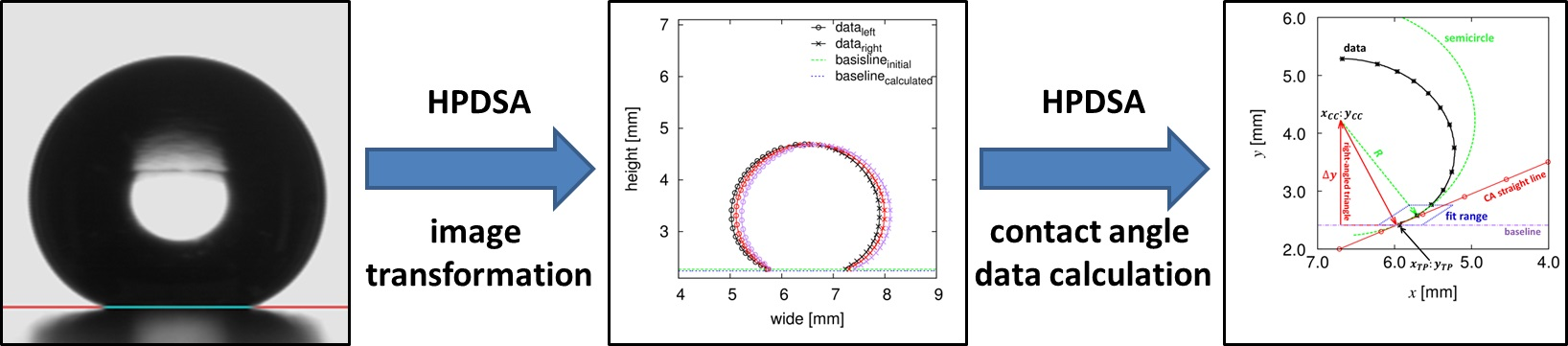
2.1. Image Transformation and Drop Shape Extraction
2.2. Baseline Detection and Triple “Point” Determination
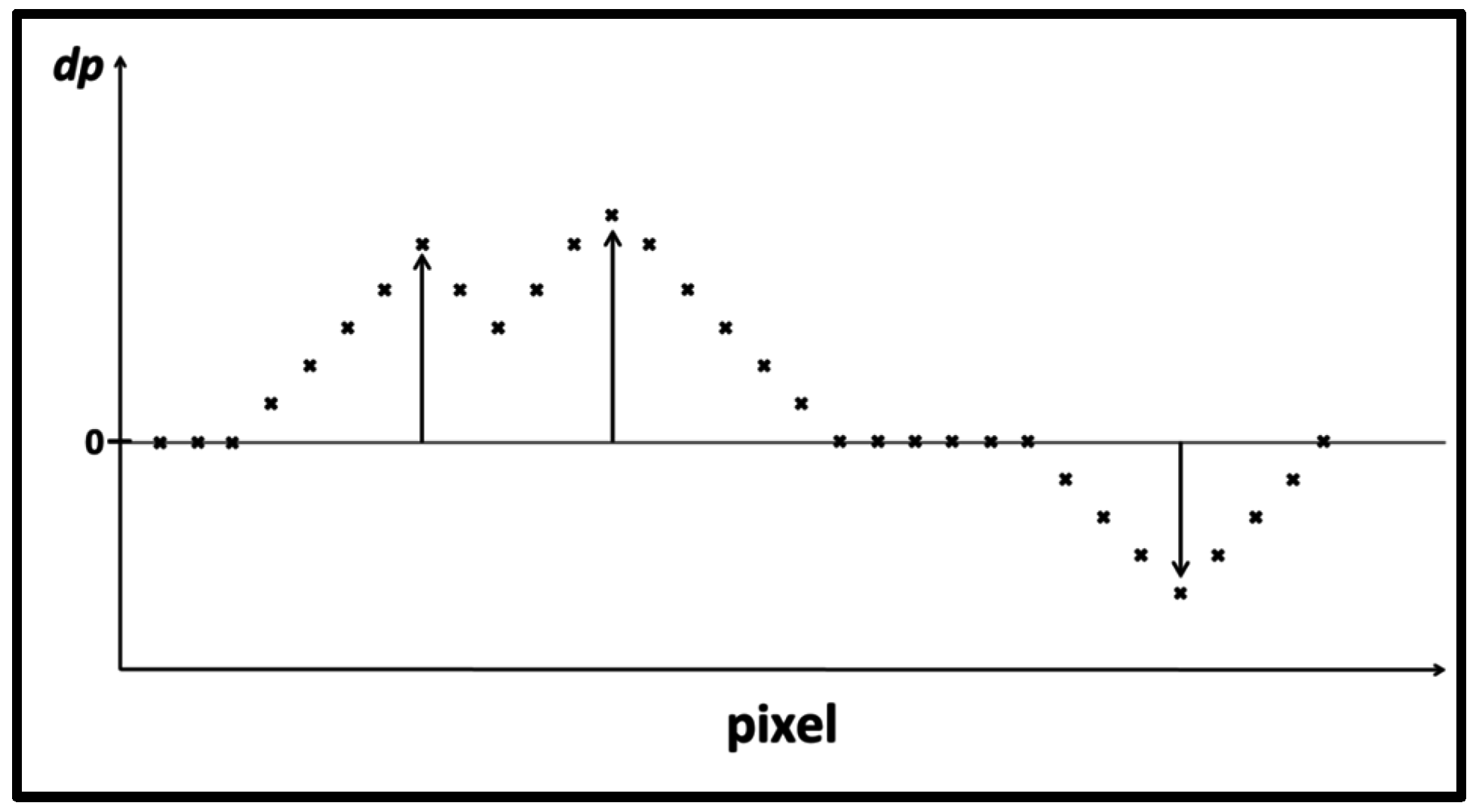
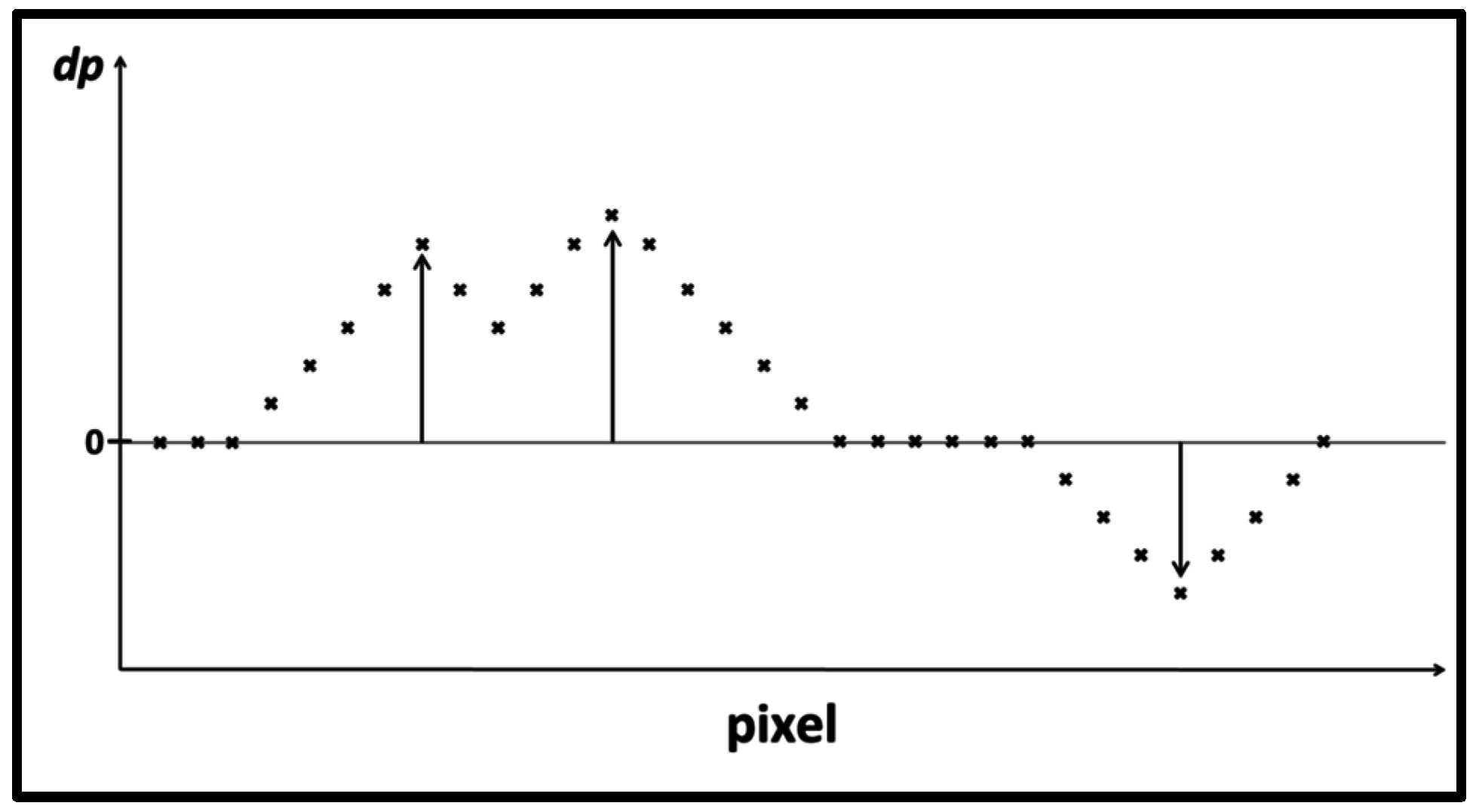
2.3. Noise Elimination
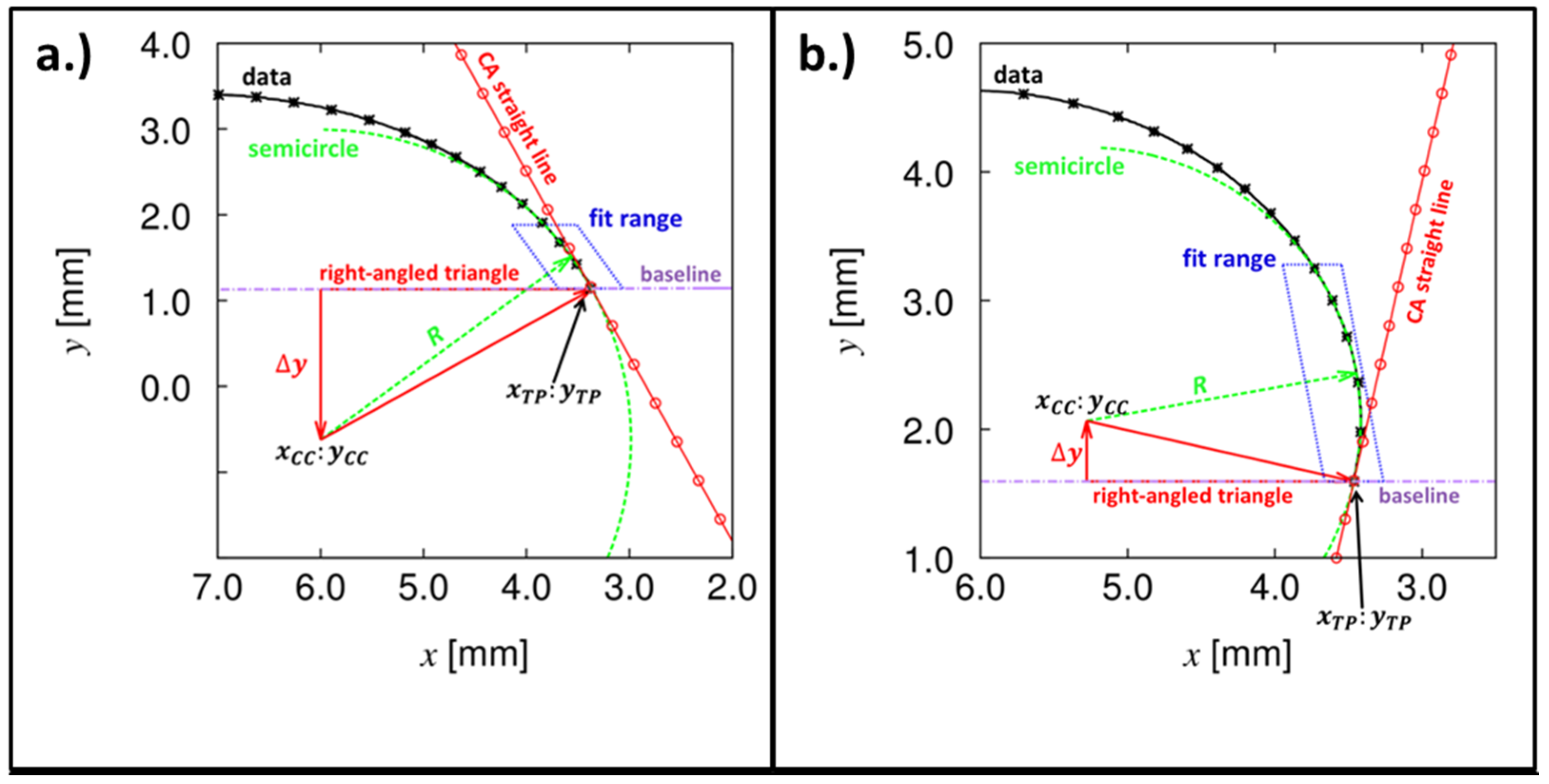
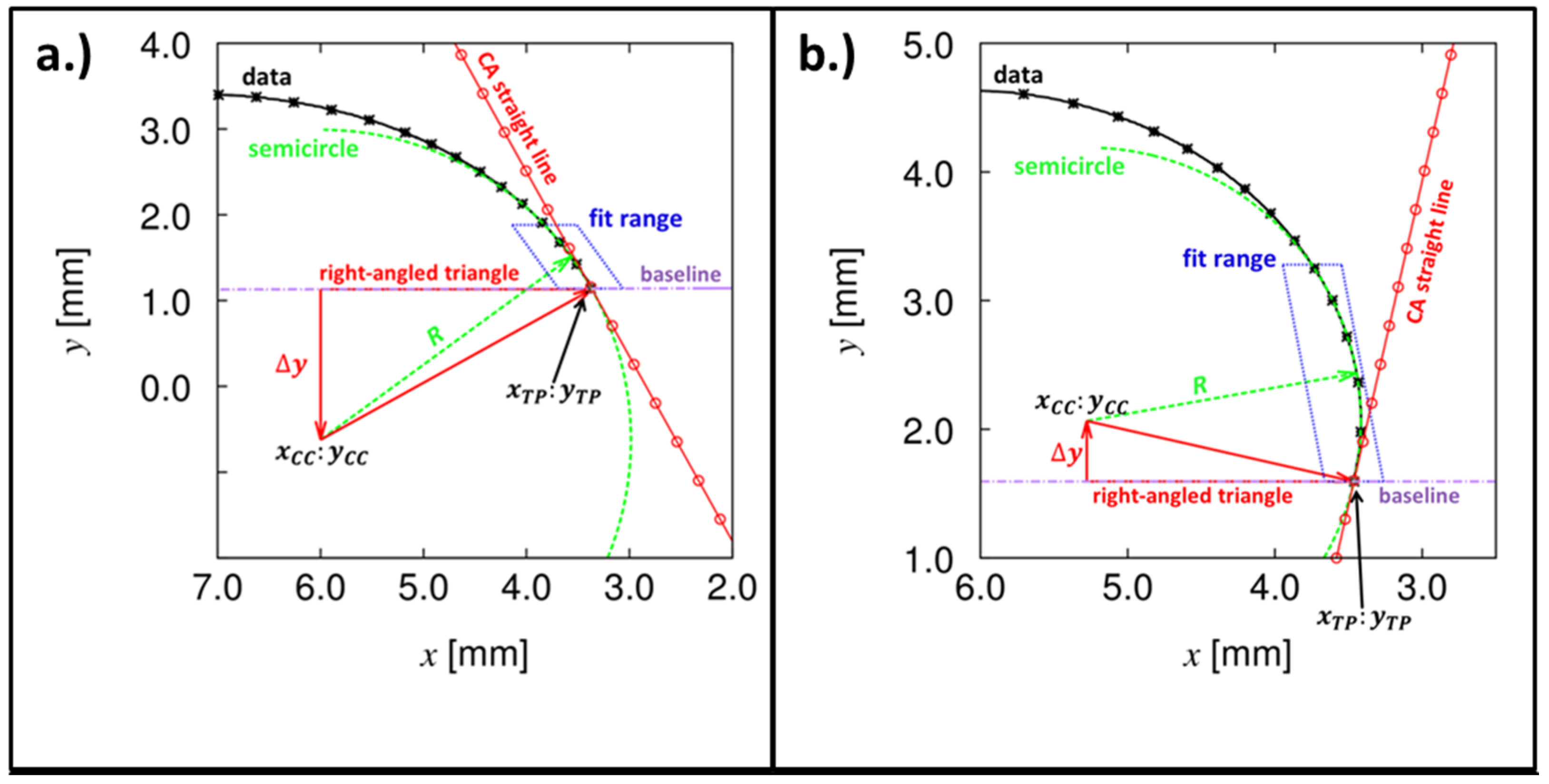
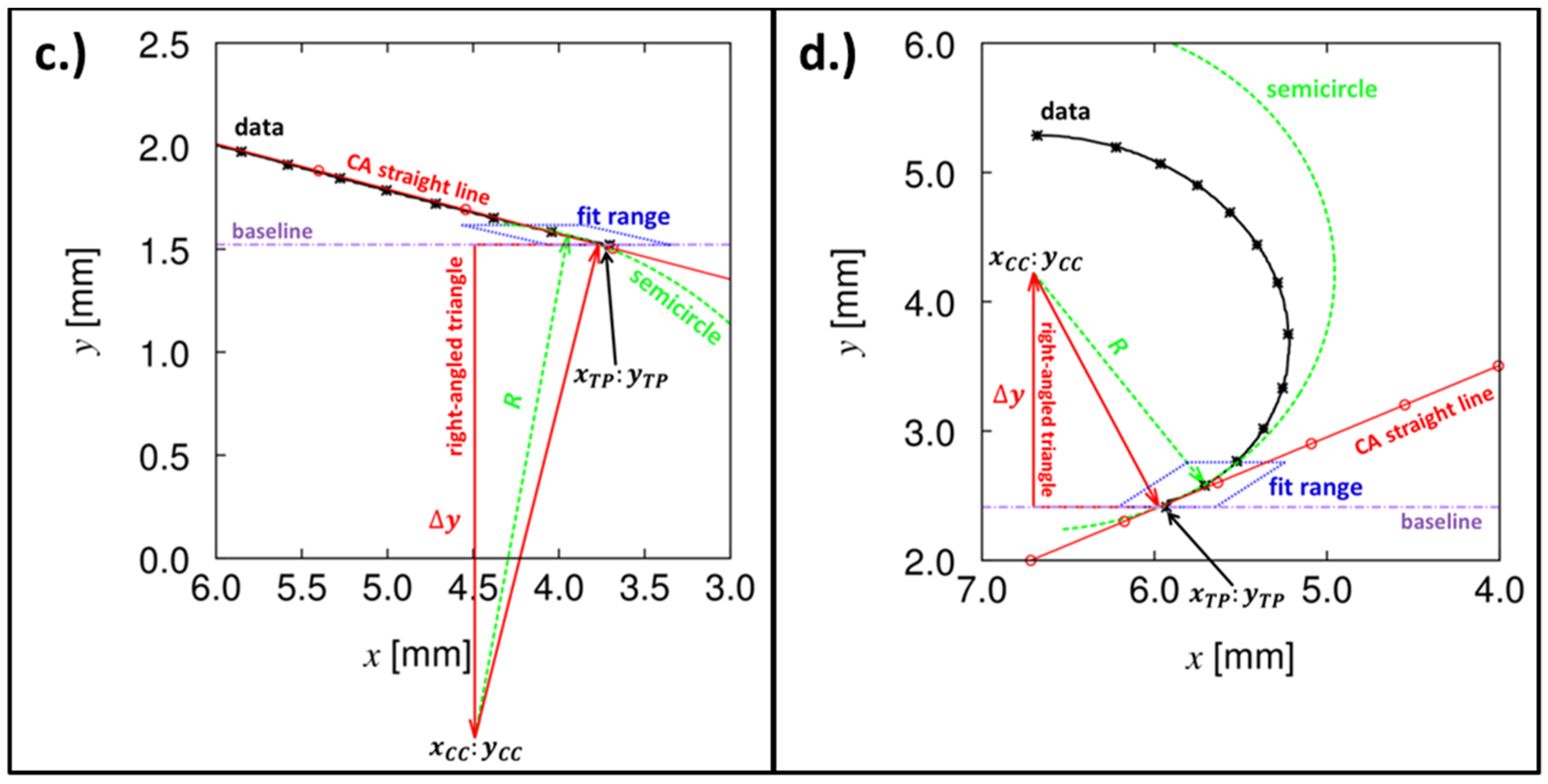
2.4. Fitting Procedure and Contact Angle Calculation
3. Materials and Methods
Contact Angle Measurement
4. Applications of HPDSA
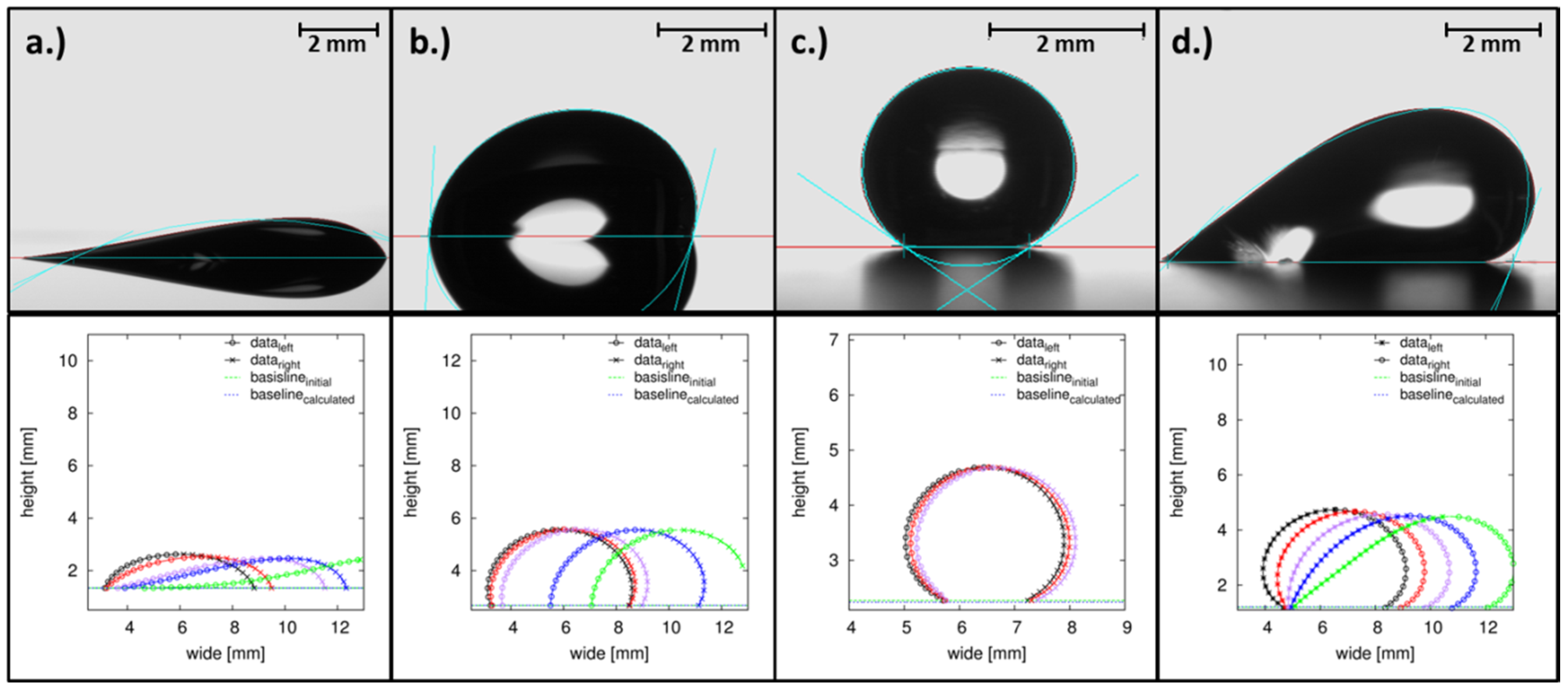
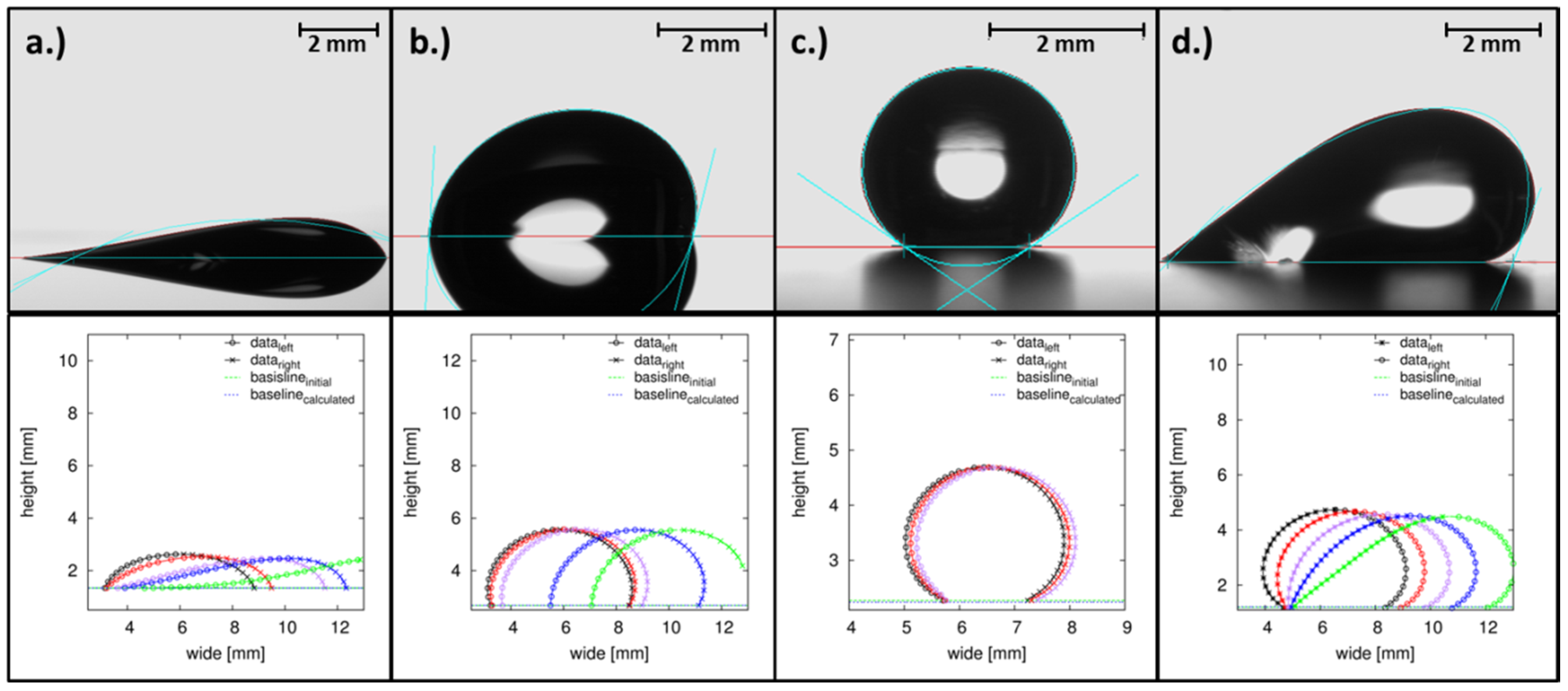
4.1. Drop Shape Extraction and Contact Angle Calculation
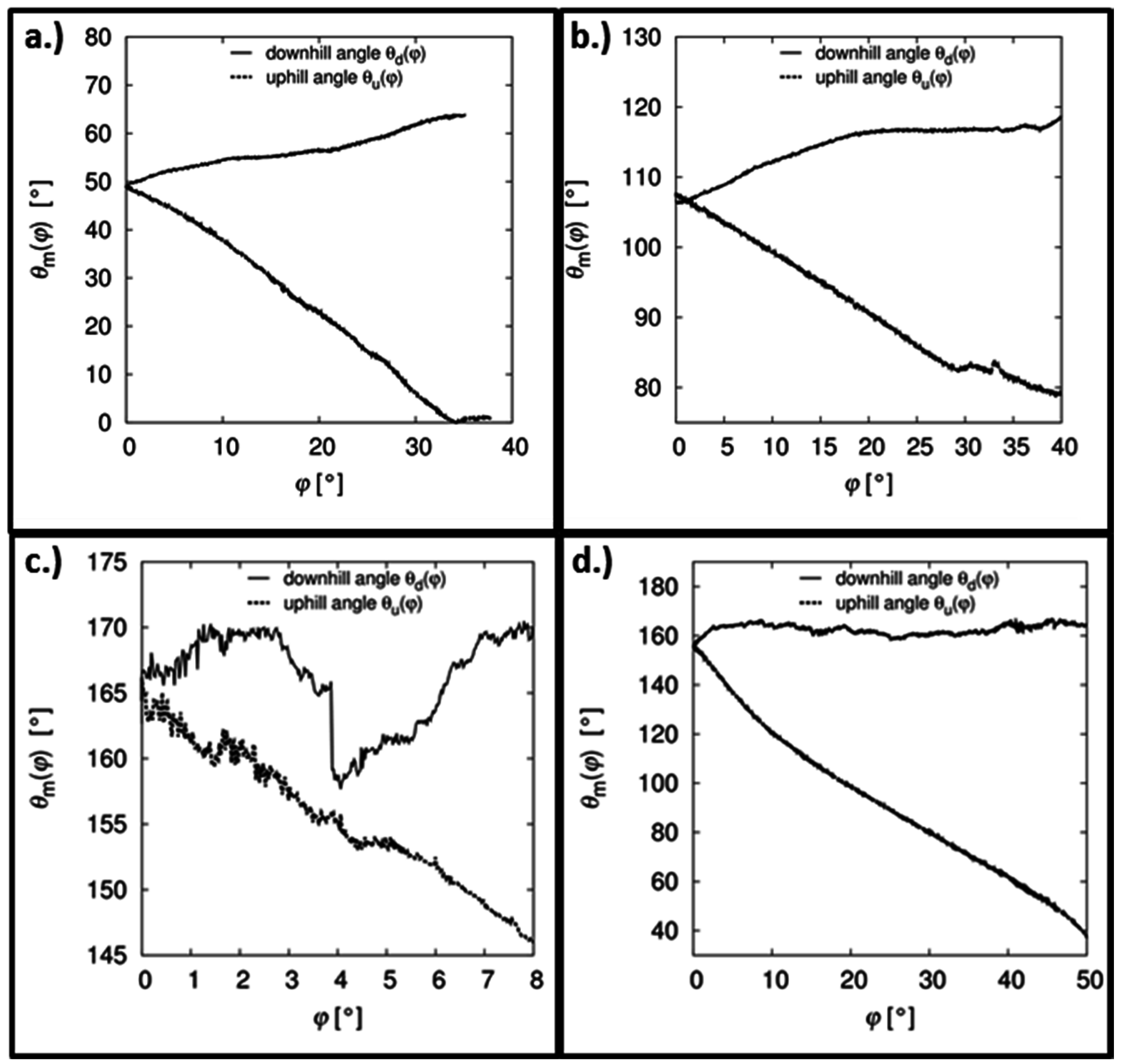
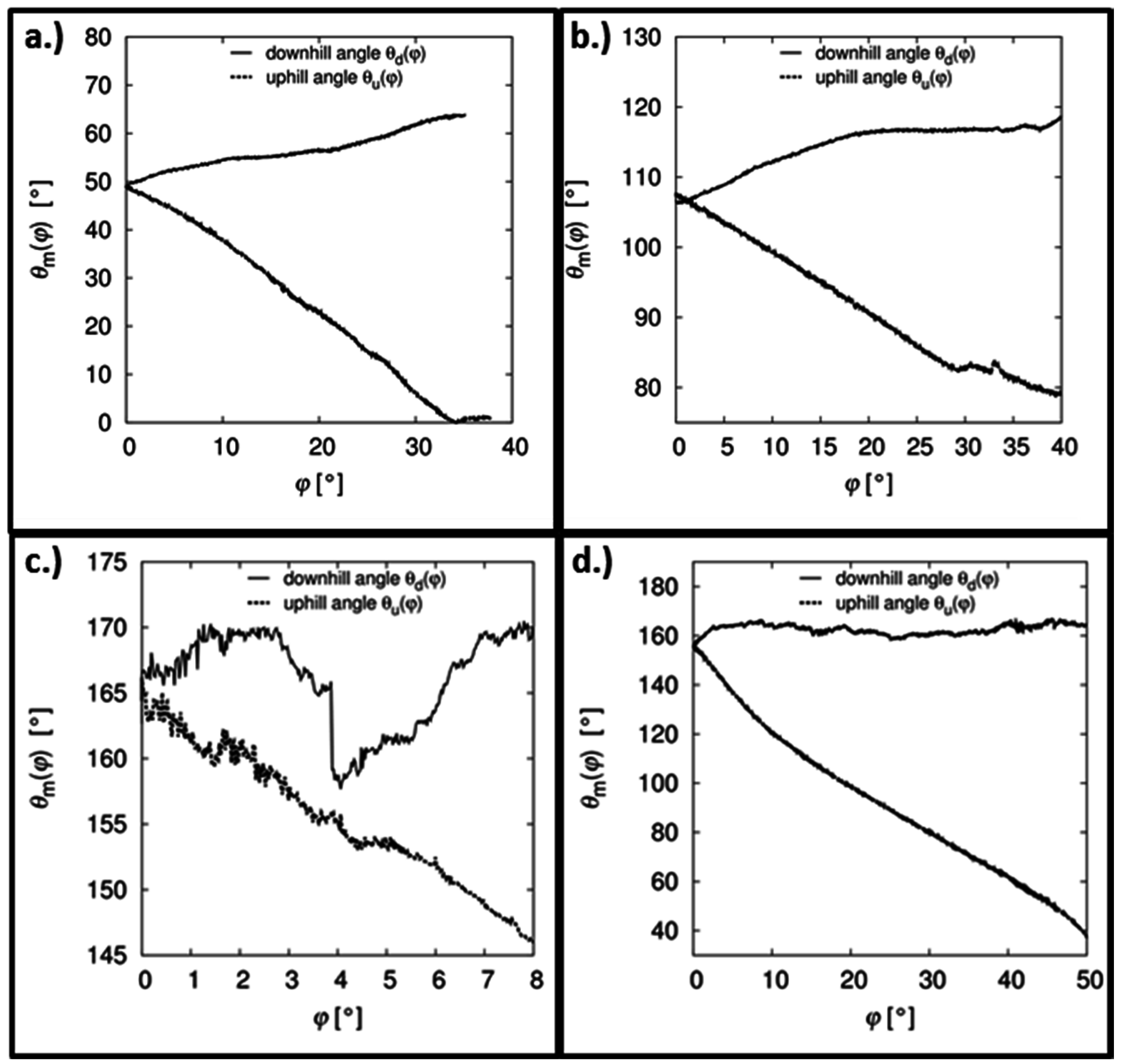
4.2. Static Contact Angle Analyses
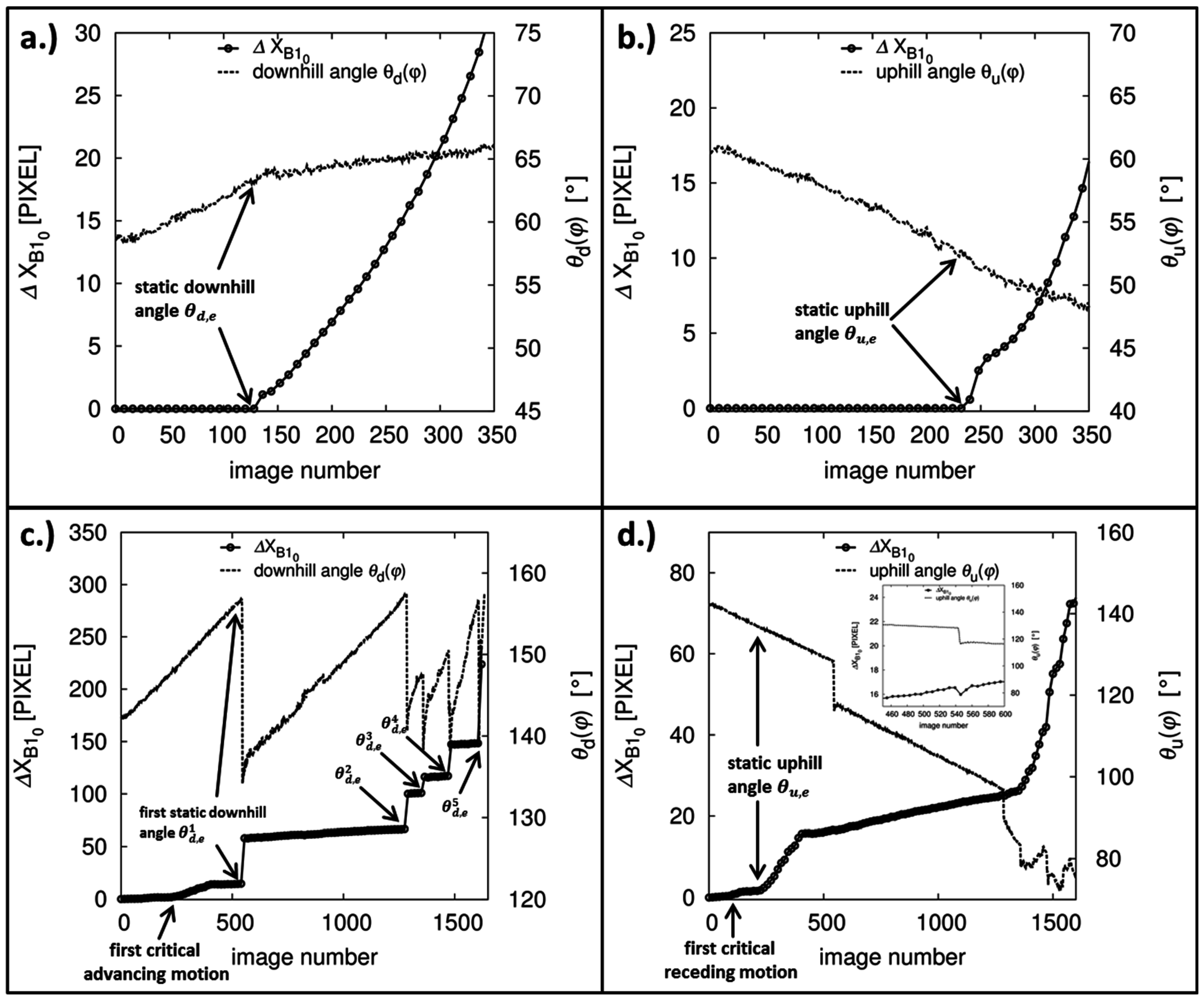
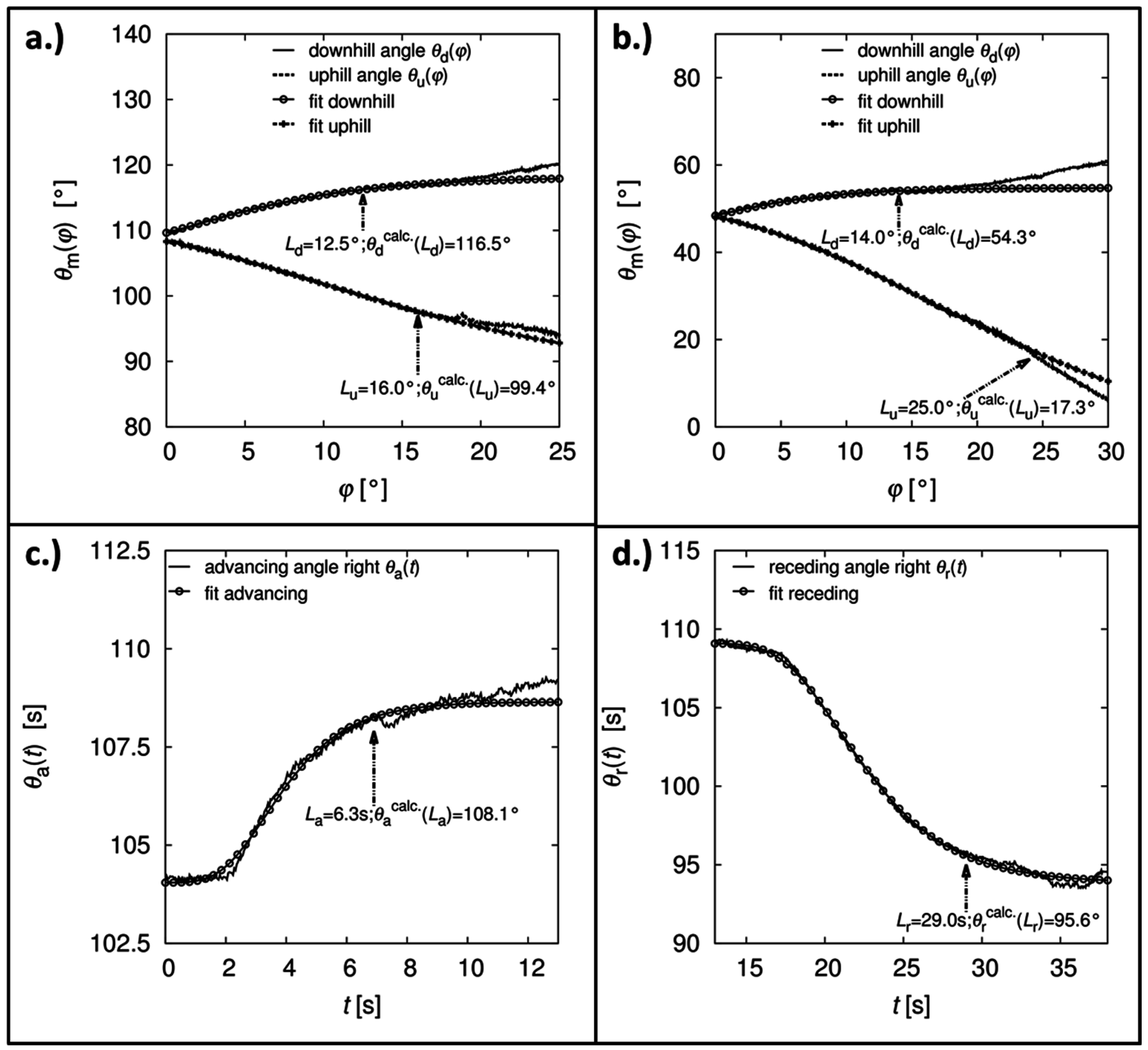
4.3. Dynamic Contact Angle Analyses: Individual and Overall Gompertzian Fitting Approach
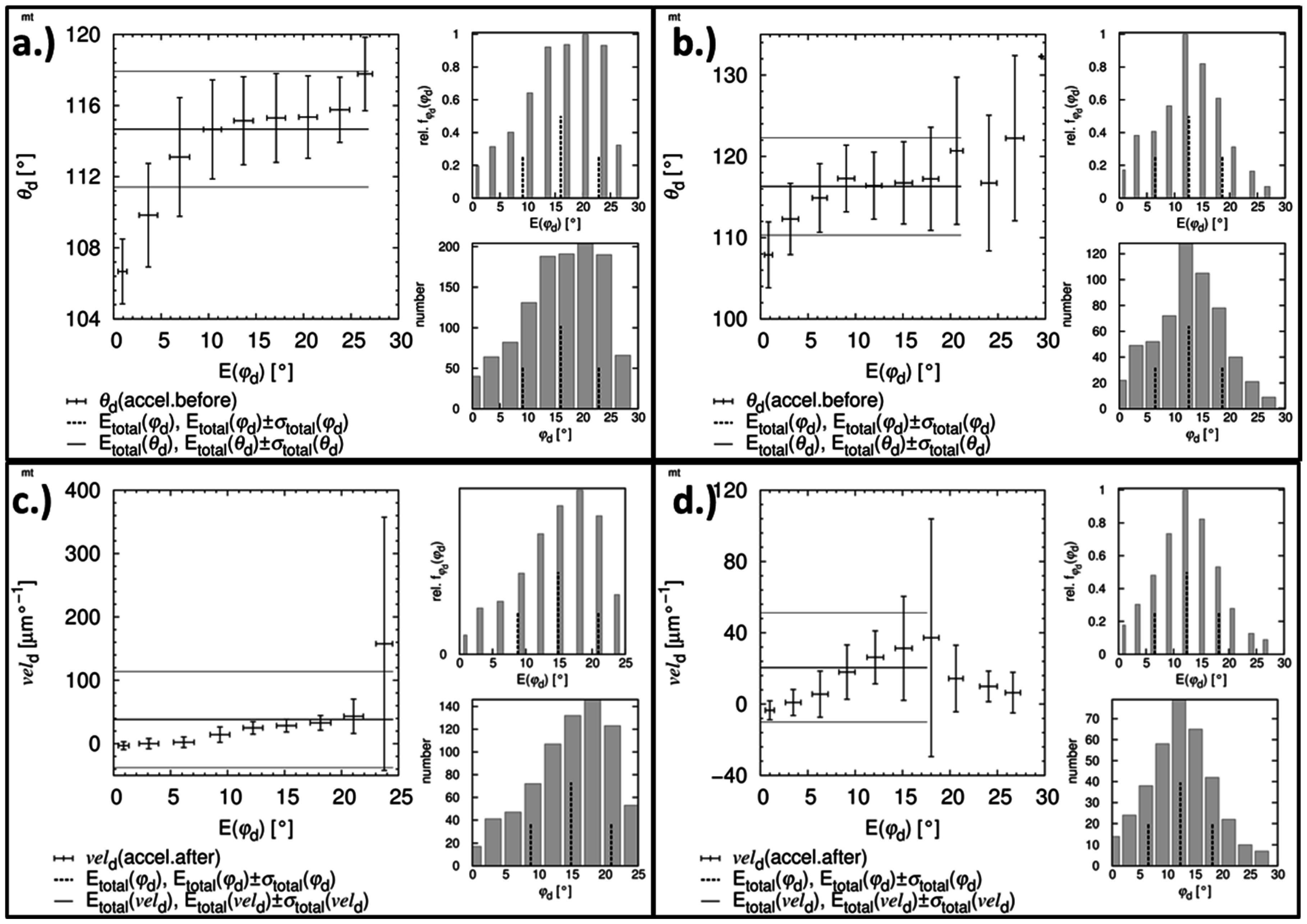
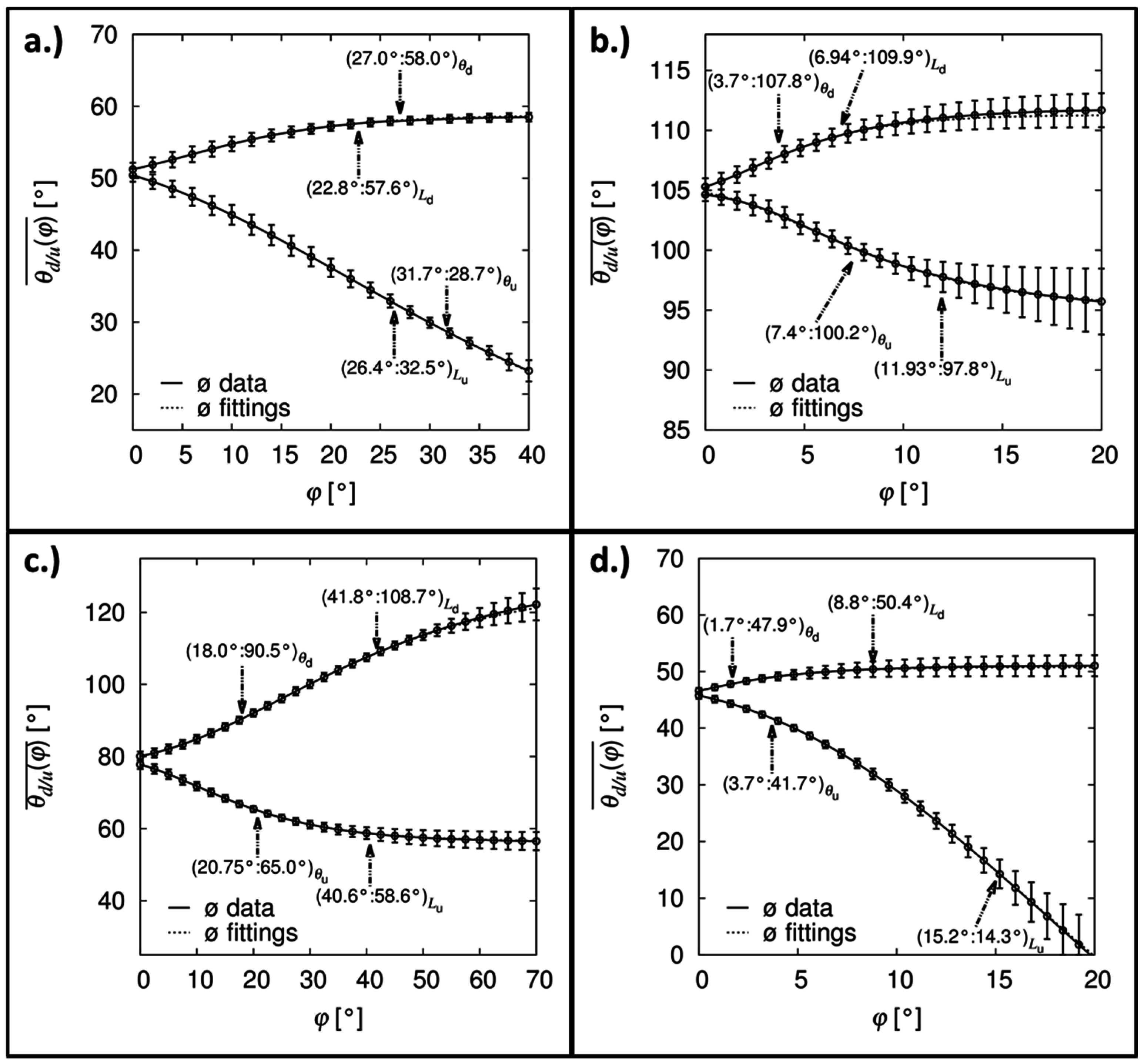
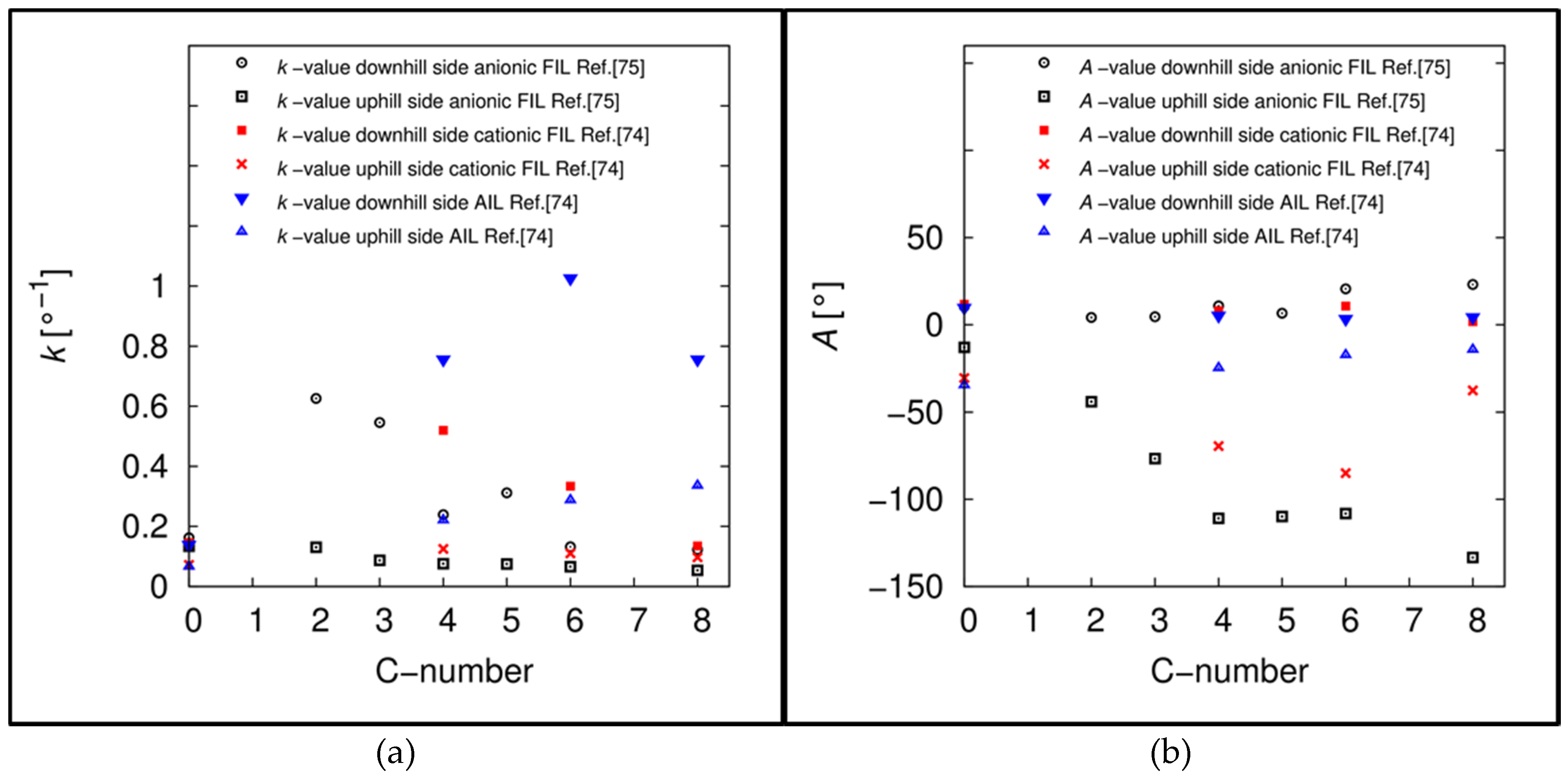
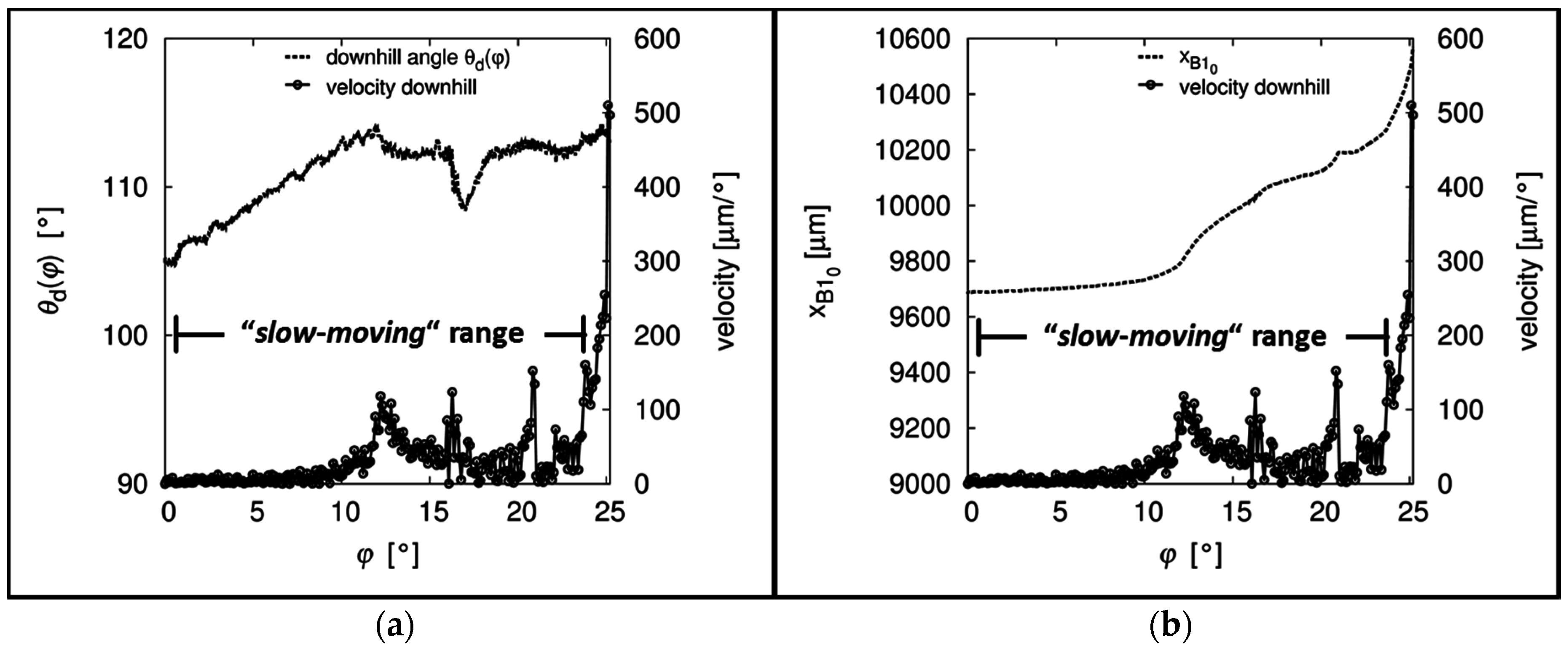
4.4. Statistical Contact Angle Analyses: Independent and Dependent Analyses
5. Summary
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| Inclination angle of the baseline | |
| Absolute adsorption | |
| Interfacial tension between the liquid and vapor interfaces | |
| Interfacial tension between the solid and liquid interfaces | |
| Interfacial tension between the solid and liquid interface according to the generalized Young equation | |
| Interfacial tension between the solid and liquid interface according to the Young equation | |
| Contact angle hysteresis | |
| Residual advancing angle depending on the inclination angle | |
| Residual advancing angle depending on the time | |
| Residual advancing angle depending on the change of drop volume | |
| Residual downhill angle depending on the inclination angle | |
| Residual downhill angle depending on the time | |
| Residual downhill angle depending on the change of drop volume | |
| Residual receding angle depending on the inclination angle | |
| Residual receding angle depending on the time | |
| Residual receding angle depending on the change of drop volume | |
| Residual uphill angle depending on the inclination angle | |
| Residual uphill angle depending on the time | |
| Residual uphill angle depending on the change of drop volume | |
| Difference in forces | |
| Difference in pressure between the convex and concave side of an interface according to the generalized Young–Laplace equation | |
| Difference in pressure between the convex and concave side of an interface according to the Young–Laplace equation | |
| Change of drop volume during contact angle measurements | |
| Fitting parameter of the Gompertzian function | |
| Change of triple line velocity between two neighboring images | |
| Shift of the boundary/triple points | |
| Difference in height coordinates between the triple points and center of the fitting circle | |
| Advancing contact angle | |
| As-placed contact angle | |
| Cassie–Baxter contact angle | |
| Downhill contact angle during inclining-plate experiments | |
| Static downhill angle | |
| Downhill and uphill angles with lowest standard deviation | |
| Measured/apparent contact angle | |
| Contact angle calculated with a Gompertzian function depending on the inclination angle | |
| Contact angle calculated with a Gompertzian function depending on the time | |
| Contact angle calculated with a Gompertzian function depending on the change of drop volume | |
| Receding contact angle | |
| Fitting parameter of the Gompertzian function | |
| Uphill angle during inclining-plate experiments | |
| Static uphill angle | |
| Wenzel contact angle | |
| Equilibrium/Young contact angle | |
| Three phase interfacial tension/line tension | |
| Gravitational corrected chemical potential of component i in the phase j | |
| Chemical potential of component i in the phase j | |
| Standard deviation of the chosen parameter p | |
| Standard deviation of color rate weighted expectation value in x-direction | |
| Standard deviation of color rate weighted expectation value in y-direction | |
| Inclination angle of the sample desk during inclining-plate measurements | |
| Inclination rate of the sample desk | |
| Angle between the substrate surface and the local principal plane of the three phase contact line | |
| Fitting parameter of the Gompertzian function | |
| Angle relative to the gravitational field | |
| Area | |
| Fitting parameter of the Gompertzian function | |
| Slope of the linear regression for the advancing angle | |
| Geometrically modeled surface area | |
| Slope of the linear regression for the receding angle | |
| Real surface area | |
| ADSA | Axisymmetric drop shape analysis |
| APCA | Apparent contact angle |
| APS | Mono-aminopropylsiloxane |
| Real length of an calculation arc | |
| Curvature constants | |
| CAH | Contact angle hysteresis |
| Sum of color values for one pixel | |
| Minimal length of an calculation arc | |
| Covered distance of the triple point | |
| Expectation value of the chosen parameter p | |
| Color rate weighted expectation value in x-direction | |
| Color rate weighted expectation value in y-direction | |
| FCF | Fast circle fit |
| Fraction of the solid surface wetted by the liquid | |
| Gravity acceleration | |
| HPDSA | High-precision drop shape analysis |
| Fitting parameter of the Gompertzian function | |
| Fitting limit of the Gompertzian function for the advancing motion | |
| Fitting limit of the Gompertzian function for the advancing/downhill motion | |
| Fitting limit of the Gompertzian function for the receding/uphill motion | |
| Fitting limit of the Gompertzian function for the receding motion | |
| Limit value | |
| Molar mass of the component i | |
| Rate of color value for every pixel | |
| Rate of color value in x-direction | |
| Rate of color value in y-direction | |
| Principle radii of curvature | |
| Radius of an ellipse in x-direction | |
| Radius of an ellipse in y-direction | |
| Specific factor in the Tadmor equation for the advancing angle | |
| Specific factor in the Tadmor equation for the receding angle | |
| Roughness ration in the Cassie–Baxter equation | |
| Roughness ratio in the Wenzel equation | |
| Fitting parameter of the Gompertzian function | |
| Velocity of the triple line | |
| Influencing factors for noise correction | |
| x-Coordinate of the boundary/triple points | |
| x-Coordinate of the center of a fitting circle | |
| x-Coordinate of the center point of an ellipse | |
| x-Coordinate of the center of a fitting circle | |
| x-Coordinate of the triple point | |
| y-Coordinate of the boundary/triple points | |
| y-Coordinate of the center of a fitting circle | |
| y-Coordinate of the center point of an ellipse | |
| y-Coordinate of the center of a fitting circle | |
| y-Coordinate of the triple point | |
| Elevation in the gravitational field |
References
- Wang, X.; Chen, L.; Bonaccurso, E.; Venzmer, J. Dynamic wetting of hydrophobic polymers by aqueous surfactant and superspreader solutions. Langmuir 2013, 29, 14855–14864. [Google Scholar] [CrossRef] [PubMed]
- Tonooka, K.; Kikuchi, N. Super-hydrophilic and solar-heat-reflective coatings for smart windows. Thin Solid Films 2013, 532, 147–150. [Google Scholar] [CrossRef]
- Bormashenko, E.; Stein, T.; Whyman, G.; Pogreb, R.; Sutovsky, S.; Danoch, Y.; Shoham, Y.; Bormashenko, Y.; Sorokov, B.; Auerbach, D. Superhydrophobic metallic surfaces and their wetting properties. J. Adhes. Sci. Technol. 2008, 22, 379–385. [Google Scholar] [CrossRef]
- Marmur, A. Solid-surface characterization by wetting. Annu. Rev. Mater. 2009, 39, 473–489. [Google Scholar] [CrossRef]
- Kamusewitz, H.; Possart, W. The Thermodynamics and wetting of real surfaces and their relationship to adhesion. Int. J. Adhes. Adhes. 1993, 13, 77–84. [Google Scholar]
- Good, R.J. Contac-Angle, Wetting, and adhesion—A critical review. J. Adhes. Sci. Technol. 1993, 6, 1269–1302. [Google Scholar] [CrossRef]
- Amirfazli, A. Interpretation of contact angle data to estimate drop adhesion onto solid surfaces. Am. Chem. Soc. 2010, 240, 1155. [Google Scholar]
- Wu, J.B.; Zhang, M.Y.; Wang, X.; Li, S.B.; Wen, W.J. A simple approach for local contact angle determination on a heterogeneous surface. Langmuir 2011, 27, 5705–5708. [Google Scholar] [CrossRef] [PubMed]
- Ryan, B.J.; Poduska, K.M. Roughness effects on contact angle measurements. Am. J. Phys. 2008, 76, 1074–1077. [Google Scholar] [CrossRef] [Green Version]
- Giljean, S.; Bigrelle, M.; Anselme, K.; Haidara, H. New insights on contact/roughness dependence on high surface energy materials. Appl. Surf. Sci. 2011, 257, 9631–9638. [Google Scholar] [CrossRef]
- Marmur, A. Superhydrophobic and superhygrophobic surfaces: From understanding non-wettability to design considerations. Soft Matter 2013, 9, 7900–7904. [Google Scholar] [CrossRef]
- Krumpfer, J.W.; Bian, P.; Zheng, P.W.; Gao, L.C.; McCarthy, T.J. Contact angle hysteresis on superhydrophobic surfaces: An ionic liquid probe fluid offers mechanistic insights. Langmuir 2011, 27, 2166–2169. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.Y.; Gao, N.; Barthlott, W. Mimicking natural superhydrophobic surfaces and grasping the wetting process: A review on recent progress in preparing superhydrophobic surfaces. Adv. Colloid Interface Sci. 2011, 169, 80–105. [Google Scholar] [CrossRef] [PubMed]
- Bormashenko, E.; Grynyov, R.; Chaniel, G.; Taitelbaum, H.; Bormashenko, Y. Robust technique allowing manufacturing superolephobic surfaces. Appl. Surf. Sci. 2013, 270, 98–103. [Google Scholar] [CrossRef]
- Grynyov, R.; Bormashenko, E.; Whyman, G.; Bormashenko, Y.; Musin, A.; Pogreb, R.; Starostin, A.; Valtsifer, V.; Strlnikov, V.; Schechter, A.; et al. Superoleophobic surfaces obtained via hierarchical metallic meshes. Langmuir 2016, 32, 4134–4140. [Google Scholar] [CrossRef] [PubMed]
- Whyman, G.; Bormashenko, E. Wetting Transitions on Rough Substrates: General Considerations. J. Adhes. Sci. Technol. 2012, 26, 207–220. [Google Scholar]
- Bormashenko, E.; Musin, A.; Whyman, G.; Zinigrad, M. Wetting transitions and depinning of the triple line. Langmuir 2012, 28, 3460–3464. [Google Scholar] [CrossRef] [PubMed]
- Bormashenko, E.Y. Wetting of Real Surfaces; deGryter Verlag: Berlin, Germany, 2013. [Google Scholar]
- Kamusewitz, H.; Possart, W.; Paul, D. Measurements of solid-water contact angles in the presence of different vapors. Int. J. Adhes. Adhes. 1993, 13, 143–149. [Google Scholar] [CrossRef]
- Kwok, D.Y.; Neumann, A.W. Contact angle measurements and contact angle interpretation. Adv. Colloid Interface Sci. 1999, 81, 167–249. [Google Scholar] [CrossRef]
- De Gennes, P.-G.; Brochart-Wyart, F.; Quéré, D. Capillarity and Wetting Phenomena: Drops, Bubbles, Pearls, Waves; Springer: Berlin, Germany, 2004. [Google Scholar]
- Erbil, H.Y. Surface Chemistry of Solid and Liquid Interfaces; Blackwell Publishing Ltd.: Malden, MA, USA, 2006. [Google Scholar]
- Kwok, D.Y.; Gietzelt, T.; Grundke, K.; Jacobasch, H.J.; Neumann, A.W. Contact angle measurements and contact angle interpretation: 1. Contact angle measurements by axisymmetric drop shape analysis and a goniometer sessile drop technique. Langmuir 1997, 13, 2880–2894. [Google Scholar] [CrossRef]
- Marmur, A. Hydro- hygro- oleo- omnio-phobic? Terminology of wettability classification. Soft Matter 2012, 8, 6867–6870. [Google Scholar] [CrossRef]
- Young, T. An essay on the Cohesion of Fluids. Philos. Trans. Royal Soc. Lond. 1805, 95, 65–87. [Google Scholar] [CrossRef]
- Laplace, P.S. Méchanique Céleste. Available online: https://archive.org/details/mcaniquecles03lapl (accessed on 31 October 2016).
- Gibbs, G.W. On the equilibrium of heterogeneous substances. Am. J. Sci. 1878, 3, 441–458. [Google Scholar] [CrossRef]
- Rusanov, A.I. Surface thermodynamics revisited. Surf. Sci. Rep. 2005, 58, 111–239. [Google Scholar] [CrossRef]
- Rusanov, A.I. Thermodynamics of solid surfaces. Surf. Sci. Rep. 1996, 23, 173–247. [Google Scholar] [CrossRef]
- Ward, C.A.; Sasges, M.R. Effect of gravity on contact angle: A theoretical investigation. J. Chem. Phys. 1998, 109, 3651–3660. [Google Scholar] [CrossRef]
- Sasges, M.R.; Ward, C.A. Effect of gravity on contact angle: An experimental investigation. J. Chem. Phys. 1998, 109, 3661–3670. [Google Scholar] [CrossRef]
- Fuji, H.; Nakae, H. Effect of gravity on contact angle. Philos. Mag. A 1995, 72, 1505–1512. [Google Scholar] [CrossRef]
- Ward, C.A.; Rahimi, P.; Sasges, M.R.; Stanga, D. Contact angle hysteresis generated by the residual gravitational field of the Space Shuttle. J. Chem. Phys. 2000, 112, 7195–7202. [Google Scholar] [CrossRef]
- Voltcu, O.; Elliot, A.W. Equilibrium of multi-phase systems in gravitational fields. J. Phys. Chem. B 2008, 112, 11981–11989. [Google Scholar]
- Blokhuis, E.M.; Shikrot, Y.; Widom, B. Young’s law with gravity. Mol. Phys. 1995, 86, 891–899. [Google Scholar] [CrossRef]
- Brutin, D.; Zhu, Z.Q.; Rahli, O.; Xie, J.C.; Liu, Q.S.; Tadrist, L. Sessile drop in microgravity: Creation, Contact angle and interface. Microgravity Sci. Technol. 2009, 21, 67–76. [Google Scholar] [CrossRef]
- Marmur, A. Measures of wettability of solid surface. Eur. Phys. J. Spec. Top. 2011, 197, 193–198. [Google Scholar] [CrossRef]
- Shanahan, M.E.R.; Di Meglio, J.M. Wetting hysteresis: Effects due to shadowing. J. Adhes. Sci. Technol. 1994, 8, 1371–1380. [Google Scholar] [CrossRef]
- Bormashenko, E.; Bormashenko, Y.; Whyman, G.; Pogreb, R.; Musin, A.; Jager, R.; Barkay, Z. Contact angle hysteresis on polymer substrates established with various experimental techniques, its interpretation, and quantitative characterization. Langmuir 2008, 24, 4020–4025. [Google Scholar] [CrossRef] [PubMed]
- Grundke, K.; Poschel, K.; Synytska, A.; Frenzel, R.; Drechsler, A.; Nitschke, M.; Cordeiro, A.L.; Uhlmann, P.; Welzel, P.B. Experimental studies of contact angle hysteresis phenomena on polymer surfaces—Toward the understanding and control of wettability for different applications. Adv. Colloid Interface Sci. 2015, 222, 350–376. [Google Scholar] [CrossRef] [PubMed]
- Starov, V. Static contact angle hysteresis on smooth, homogeneous solid substrates. Colloid Polym. Sci. 2013, 291, 261–270. [Google Scholar] [CrossRef]
- Wenzel, R.N. Resistance of solid surfaces to wetting by water. Ind. Eng. Chem. 1936, 28, 988–994. [Google Scholar] [CrossRef]
- Cassie, A.B.D.; Baxter, S. Wettability of porous surfaces. Trans. Faraday Soc. 1944, 40, 546–551. [Google Scholar] [CrossRef]
- Bormashenko, E. Progress in understanding wetting transitions on rough surfaces. Adv. Colloid Interface Sci. 2015, 222, 92–103. [Google Scholar] [CrossRef] [PubMed]
- David, R.; Neumann, W.A. Energy barriers between the Cassie and Wenzel wetting states on random superhydrophobic surfaces. Colloids Surf. A 2013, 425, 51–58. [Google Scholar] [CrossRef]
- Tadmor, R. Line energy and the relation between advancing, receding and Young contact angles. Langmuir 2004, 20, 7659–7664. [Google Scholar] [CrossRef] [PubMed]
- Schulze, R.-D.; Possart, W.; Kamusewitz, H.; Bischof, C. Young’s equilibrium contact angle on rough solid surfaces. Part I. An empirical determination. J. Adhes. Sci. Technol. 1989, 3, 39–48. [Google Scholar] [CrossRef]
- Kamusewitz, H.; Possart, W. Wetting and scanning force microscopy on rough polymer surfaces: Wenzel’s roughness factor and the thermodynamic contact angle. Appl. Phys. A 2003, 76, 899–902. [Google Scholar]
- Joanny, J.F.; De Gennes, P.G. Model for contact angle hysteresis. J. Chem. Phys. 1984, 81, 552–562. [Google Scholar] [CrossRef]
- Shanahan, M.E.R. Effect of surface flaws on the wettability of solids. J. Adhes. Sci. Technol. 1992, 6, 489–501. [Google Scholar] [CrossRef]
- Marmur, A. Soft contact: Measurements and interpretation of contact angle. Soft Matter 2006, 2, 12–17. [Google Scholar] [CrossRef]
- Bittoun, E.; Marmur, A. Chemical nano-heterogeneities detection by contact angle hysteresis: Theoretical feasibility. Langmuir 2010, 25, 1277–1281. [Google Scholar] [CrossRef] [PubMed]
- Schmitt, M.; Hempelmann, R.; Heib, F. Experimental Investigation of dynamic contact angles on horizontal and inclined surfaces part I: Flat silicon oxide surfaces. Z. Phys. Chem. 2014, 228, 11–25. [Google Scholar] [CrossRef]
- Schmitt, M.; Hempelmann, R.; Heib, F. Experimental Investigation of dynamic contact angles on horizontal and inclined surfaces part II: Rough homogeneous surfaces. Z. Phys. Chem. 2014, 228, 629–648. [Google Scholar] [CrossRef]
- Krasovitski, B.; Marmur, A. Drops down the hill: Theoretical study of limiting contact angles and the hysteresis range on a tilted plate. Langmuir 2005, 21, 3881–3885. [Google Scholar] [CrossRef] [PubMed]
- Tadmor, R.; Chaurasia, K.; Yadav, P.S.; Leh, A.; Bahadur, P.; Dang, L.; Hoffer, W.R. Drop retention force as a function of resting time. Langmuir 2008, 24, 9370–9374. [Google Scholar] [CrossRef] [PubMed]
- Yadav, P.S.; Bahadur, P.; Tadmor, R.; Chaurasia, K.; Leh, A. Drop retention force as a function of drop size. Langmuir 2008, 24, 3181–3184. [Google Scholar] [CrossRef] [PubMed]
- Del Rio, O.I.; Kwok, D.Y.; Wu, R.; Alvarez, J.M.; Neuman, A.W. Contact angle measurements by axisymmetric drop shape analysis and an automated polynomial program. Colloids Surf. A 1998, 143, 197–210. [Google Scholar] [CrossRef]
- Kalantarian, A.; David, R.; Neumann, A.W. Methodology for high accuracy contact angle measurement. Langmuir 2009, 25, 14146–14154. [Google Scholar] [CrossRef] [PubMed]
- Kalantarian, A.; David, R.; Chen, J.; Neumann, A.W. Simultaneous measurement of contact angle and surface tension using axisymmetric drop-shape analysis-no apex (ADSA-NA). Langmuir 2011, 27, 3485–3495. [Google Scholar] [CrossRef] [PubMed]
- Emelyanenko, A.M.; Boinovich, L.B. The role of discretization in video image processing of sessile and pendant drop profiles. Colloids Surf. A 2001, 189, 197–202. [Google Scholar] [CrossRef]
- Biole, D.; Wang, M.; Bertola, V. Assessment of direct image processing methods to measure the apparent contact angle of liquid drops. Exp. Therm. Fluid Sci. 2016, 76, 296–305. [Google Scholar] [CrossRef]
- Volpe, D.C.; Siboni, S. Use, abuse, misuse and proper use of contact angles: A critical review. Rev. Adhes. Adhes. 2015, 3, 365–385. [Google Scholar] [CrossRef]
- Schmitt, M.; Heib, F. High-precision drop shape analysis on inclining flat surfaces: Introduction and comparison of this special method with commercial contact angle analysis. J. Chem. Phys. 2013, 139, 134201. [Google Scholar] [CrossRef] [PubMed]
- Tadmor, R.; Bahadur, P.; Leh, A.; N’guessan, H.E.; Jaini, R.; Dang, L. Measurement of lateral adhesion forces at the interface between a liquid drop and a substrate. Phys. Rev. Lett. 2009, 103, 266101. [Google Scholar] [CrossRef] [PubMed]
- N’guessan, H.E.; Leh, A.; Cox, P.; Bahadur, P.; Tadmor, R.; Patra, P.; Vajtai, R.; Ajayan, P.M.; Wasnik, P. Water tribology on graphene. Nat. Commun. 2012, 3, 1242. [Google Scholar] [CrossRef] [PubMed]
- Tadmor, R. Misconceptions in wetting phenomena. Langmuir 2013, 29, 15474–15475. [Google Scholar] [CrossRef] [PubMed]
- Leh, A.; N’guessan, H.E.; Fan, J.; Bahadur, P.; Tadmor, R.; Zhao, Y. On the role of the three-phase contact line in surface deformation. Langmuir 2012, 28, 5795–5801. [Google Scholar] [CrossRef] [PubMed]
- Tadmor, R. Drops that pull themselves up. Surf. Sci. 2014, 628, 17–20. [Google Scholar] [CrossRef]
- Schmitt, M.; Hempelmann, R.; Groß, K.; Heib, F. Introduction in the high-precision drop shape analysis (HPDSA). In Proceedings of the European Adhesion Conference (EURADH), Alicante, Spain, 22–25 April 2014.
- Schmitt, M.; Hempelmann, R.; Ingebrandt, S.; Munief, W.-M.; Groß, K.; Grub, J.; Heib, F. Statistical contact angle analyses: “Slow moving” drops on inclining flat mono-aminopropylsiloxane surfaces. J. Adhes. Sci. Technol. 2015, 29, 1796–1806. [Google Scholar] [CrossRef]
- Schmitt, M.; Grub, J.; Heib, F. Statistical contact angle analyses; “slow moving” drops on a horizontal silicon-oxide surface. J. Colloid Interface Sci. 2015, 447, 248–253. [Google Scholar] [CrossRef] [PubMed]
- Rauber, D.; Heib, F.; Schmitt, M.; Hempelmann, R. Influence of perfluoroalkyl-chains on the surface properties of 1-methylimidazolium bis(trifluoromethanesulfonyl imide ionic liquids. J. Mol. Liq. 2016, 216, 246–258. [Google Scholar] [CrossRef]
- Heib, F.; Rauber, D.; Dier, T.; Volmer, D.A.; Hempelmann, R.; Schmitt, M. On the physicochemical and surface properties of 1-alkyl 3-methylimidazolium bis(nonafluorobutylsulfonyl)imide ionic liquids. J. Mol. Liq. 2016. submitted. [Google Scholar]
- Heib, F.; Munief, W.M.; Ingebrandt, S.; Hempelmann, R.; Schmitt, M. Influence of different chemical surface patterns on the dynamic wetting behavior on flat and silanized silicon wafers during inclining-plate measurements: An experimental investigation with the high-precision drop shape analysis approach. Colloids Surf. A 2016, 508, 274–285. [Google Scholar] [CrossRef]
- Schmitt, M.; Hempelmann, R.; Ingebrandt, S.; Munief, W.; Durneata, D.; Groß, K.; Heib, F. Statistical approach for contact angle determination on inclining surfaces: “Slow-moving” analyses of non-axisymmetric drops on a flat silanized silicon wafer. Int. J. Adhes. Adhes. 2014, 55, 123–131. [Google Scholar] [CrossRef]
- Schmitt, M.; Groß, K.; Grub, J.; Heib, F. Detailed statistical contact angle analyses; “slow moving” drops on inclining silicon-oxide surfaces. J. Colloid Interface Sci. 2015, 447, 229–239. [Google Scholar] [CrossRef] [PubMed]
- Heib, F.; Hempelmann, R.; Munief, W.M.; Ingebrandt, S.; Fug, F.; Possart, W.; Groß, K.; Schmitt, M. High-precision drop shape analysis (HPDSA) of quasistatic contact angles on silanized silicon wafers with different surface topographies during inclining-plate measurements: Influence of the surface roughness on the contact line dynamics. Appl. Surf. Sci. 2015, 342, 11–25. [Google Scholar] [CrossRef]
- Tadmor, R.; Yadav, P.S. As placed contact angles for sessile drops. J. Colloid Interface Sci. 2008, 317, 241–246. [Google Scholar] [CrossRef] [PubMed]
- Schmitt, M.; Shultze-Pilot, R.; Hempelmann, R. Kinetics of bulk polymerization and Gompertz’s law. Phys. Chem. Chem. Phys. 2011, 13, 690–695. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pixel Number | Sum of Color Value | Rate of Five-Point Regression | Rate of Three-Point Regression |
|---|---|---|---|
| 1 | 765 | −153.0 | 0.0 |
| 2 | 765 | −229.5 | −382.5 |
| 3 | 0 | −229.5 | −382.5 |
| 4 | 0 | −153.0 | 0.0 |
| 5 | 0 | 0 | 0.0 |
| 6 | 0 | 20.0 | 0.0 |
| 7 | 0 | 10.0 | −50.0 |
| 8 | 100 | 0.0 | 0.0 |
| 9 | 0 | −10.0 | −50.0 |
| 10 | 0 | 20.0 | 0.0 |
| 11 | 0 | 153.0 | 0.0 |
| 12 | 0 | 229.5 | 382.5 |
| 13 | 765 | 229.5 | 382.5 |
| 14 | 765 | 153.0 | 0.0 |
| Contact Angle Event | Conditions | Note |
|---|---|---|
| before acceleration | sensitive to acceleration | |
| during acceleration | sensitive to deceleration and acceleration | |
| after acceleration | ||
| deceleration followed by constant velocity | ||
| constant velocity | ||
| Contact Angle Event (Downhill) | Count Number | ||
| before acceleration | 16.00 | 6.89 | 1156 |
| 114.67 | 3.26 | 1156 | |
| 96.86 | 288.88 | 1156 | |
| 461.29 | 467.16 | 1156 | |
| during acceleration | 16.33 | 7.59 | 3612 |
| 114.41 | 3.50 | 3612 | |
| 206.65 | 648.48 | 3612 | |
| 550.82 | 599.00 | 3612 | |
| after acceleration | 14.88 | 6.07 | 744 |
| 114.41 | 3.19 | 744 | |
| 38.22 | 75.97 | 744 | |
| 336.06 | 268.48 | 744 | |
| constant velocity | 8.44 | 6.06 | 4170 |
| 112.29 | 3.62 | 4170 | |
| 16.81 | 43.66 | 4170 | |
| 120.18 | 195.53 | 4170 | |
| Contact Angle Event (Receding) | Count Number | ||
| ) | |||
| before acceleration | 16.82 | 7.74 | 791 |
| 90.20 | 7.78 | 791 | |
| 119.13 | 331.75 | 791 | |
| 292.97 | 412.47 | 791 | |
| during acceleration | 16.99 | 8.16 | 2996 |
| 90.16 | 8.07 | 2996 | |
| 217.27 | 617.47 | 2996 | |
| 369.22 | 504.90 | 2996 | |
| after acceleration | 14.86 | 7.22 | 408 |
| 92.20 | 7.55 | 408 | |
| 31.66 | 85.84 | 408 | |
| 148.52 | 166.84 | 408 | |
| constant velocity | 10.44 | 6.12 | 6126 |
| 96.95 | 7.02 | 6126 | |
| 8.57 | 47.27 | 6126 | |
| 65.95 | 81.93 | 6126 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heib, F.; Schmitt, M. Statistical Contact Angle Analyses with the High-Precision Drop Shape Analysis (HPDSA) Approach: Basic Principles and Applications. Coatings 2016, 6, 57. https://doi.org/10.3390/coatings6040057
Heib F, Schmitt M. Statistical Contact Angle Analyses with the High-Precision Drop Shape Analysis (HPDSA) Approach: Basic Principles and Applications. Coatings. 2016; 6(4):57. https://doi.org/10.3390/coatings6040057
Chicago/Turabian StyleHeib, Florian, and Michael Schmitt. 2016. "Statistical Contact Angle Analyses with the High-Precision Drop Shape Analysis (HPDSA) Approach: Basic Principles and Applications" Coatings 6, no. 4: 57. https://doi.org/10.3390/coatings6040057