A Virtual Micro-Islanding-Based Control Paradigm for Renewable Microgrids

 ,
,
Abstract
:1. Introduction
- Identification of failed communication links.
- Virtual segmentation of the MG network into smaller controllable islands.
- Variation in droop and consensus control parameters to achieve power sharing, voltage and frequency restoration during communication faults.
- Using small signal analysis to study MG system stability under the proposed control scheme.
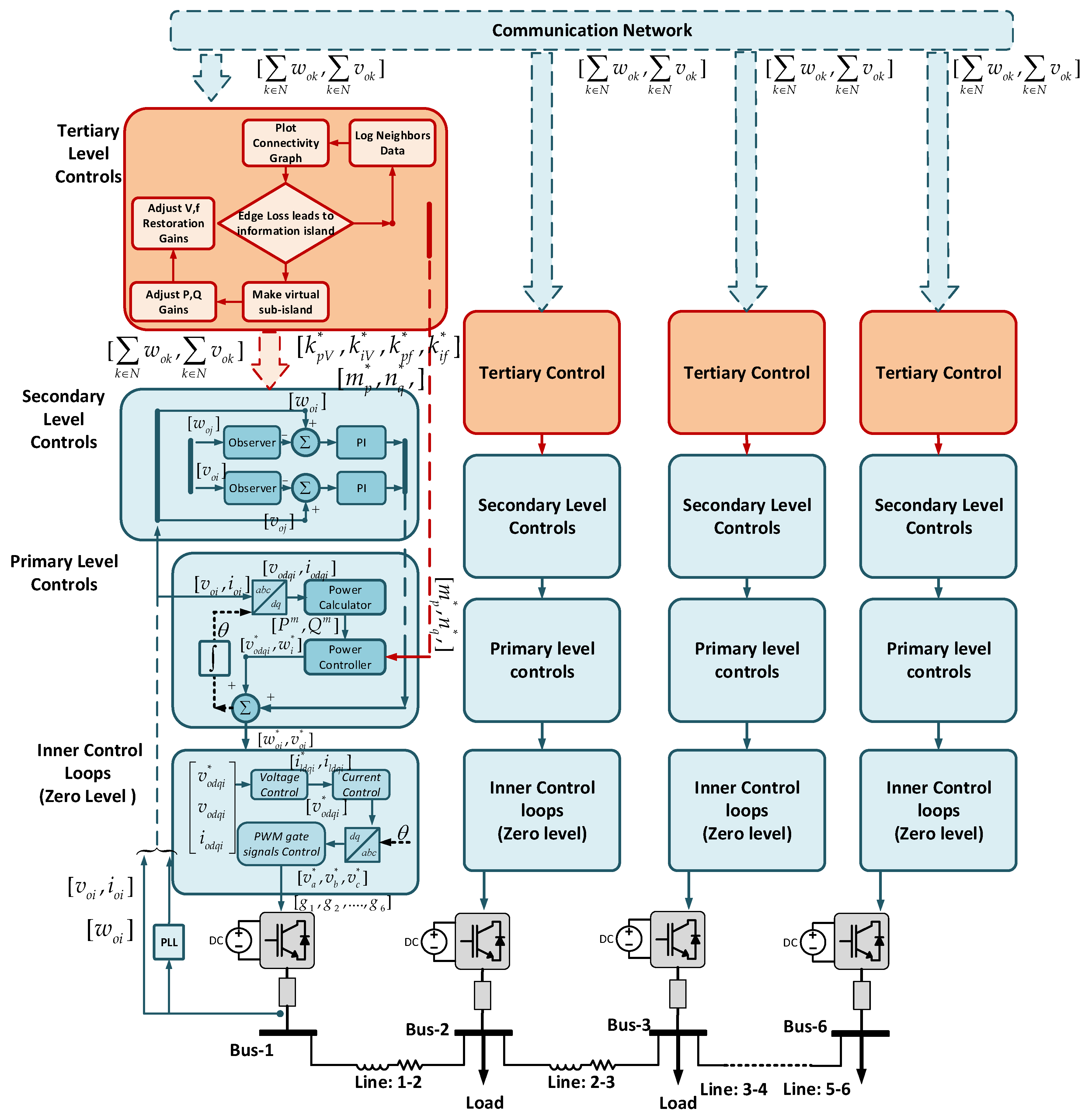
2. Network Layout
3. Hierarchical Control Paradigm
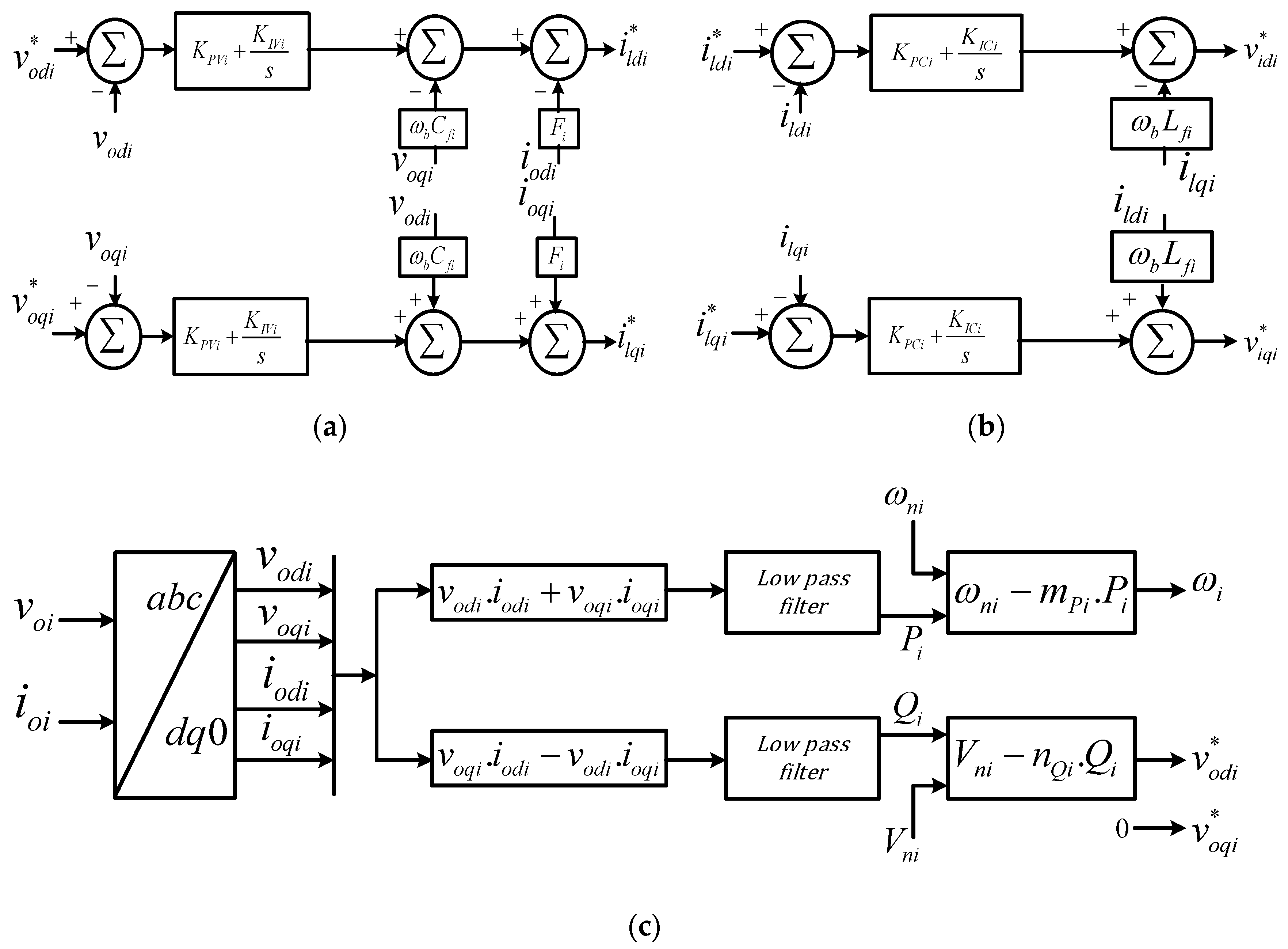
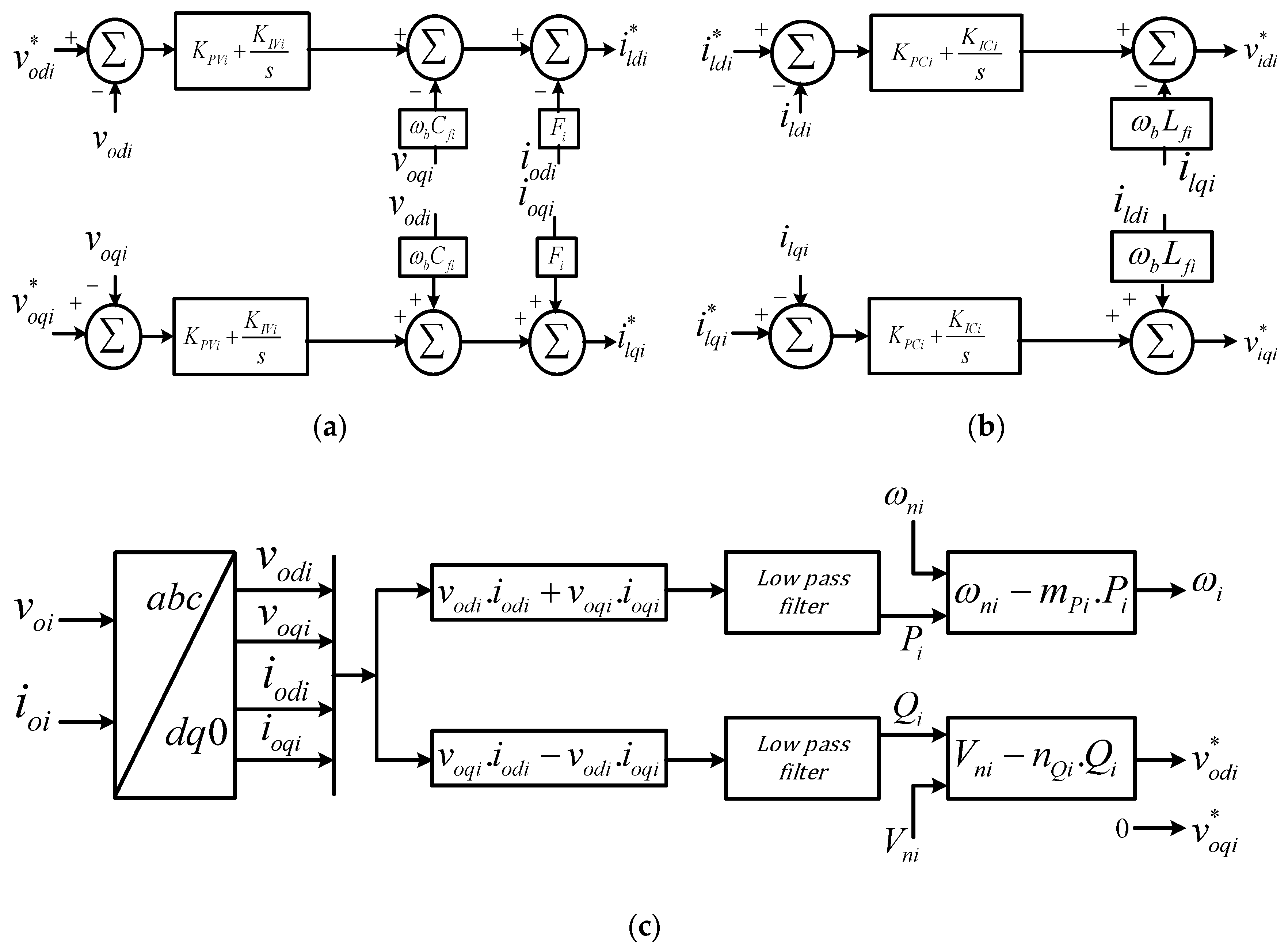
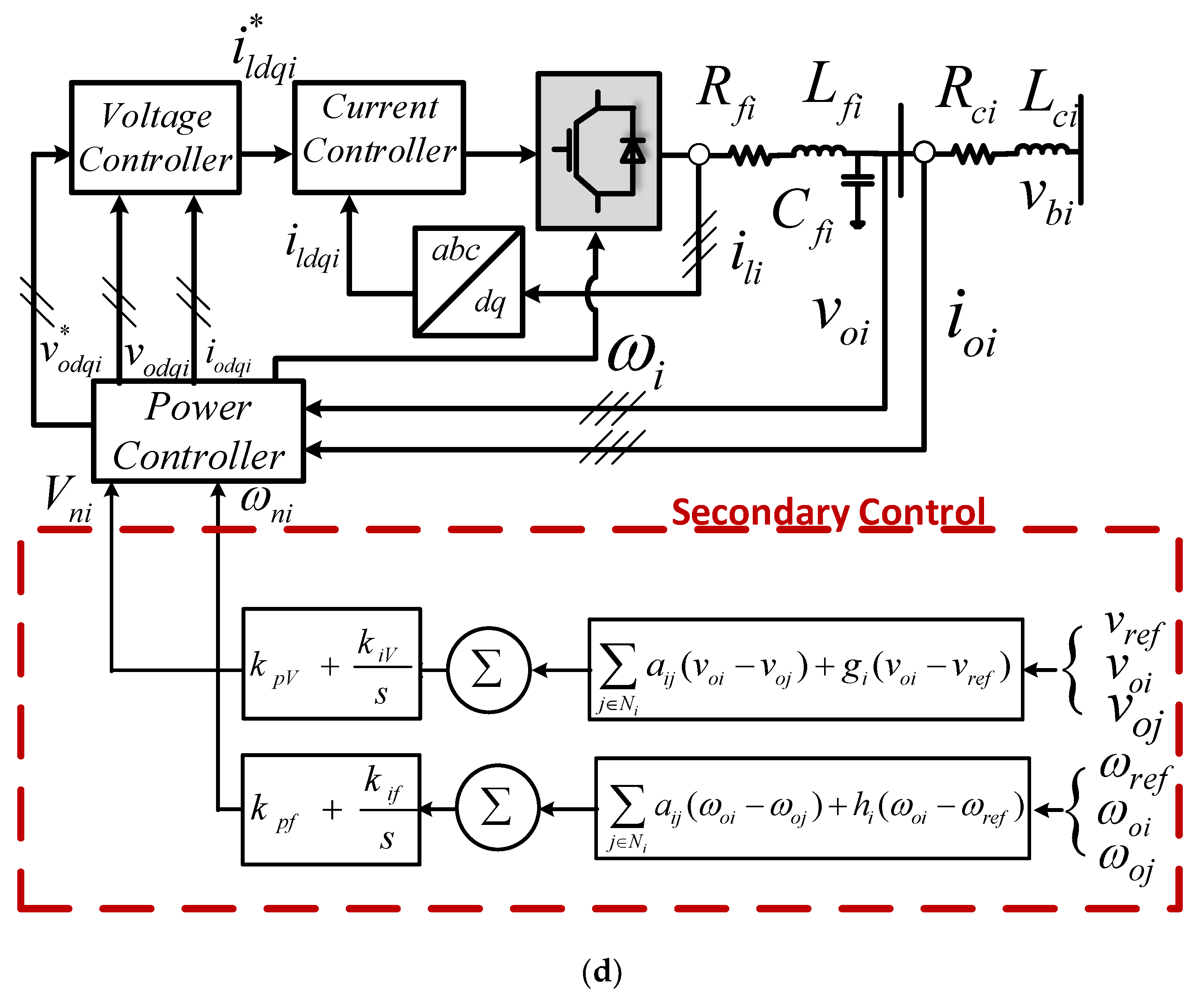
3.1. Zero Level Control loops: Voltage and Current Regulation
3.2. Primary Controls: Power Balancing between Distributed Sources
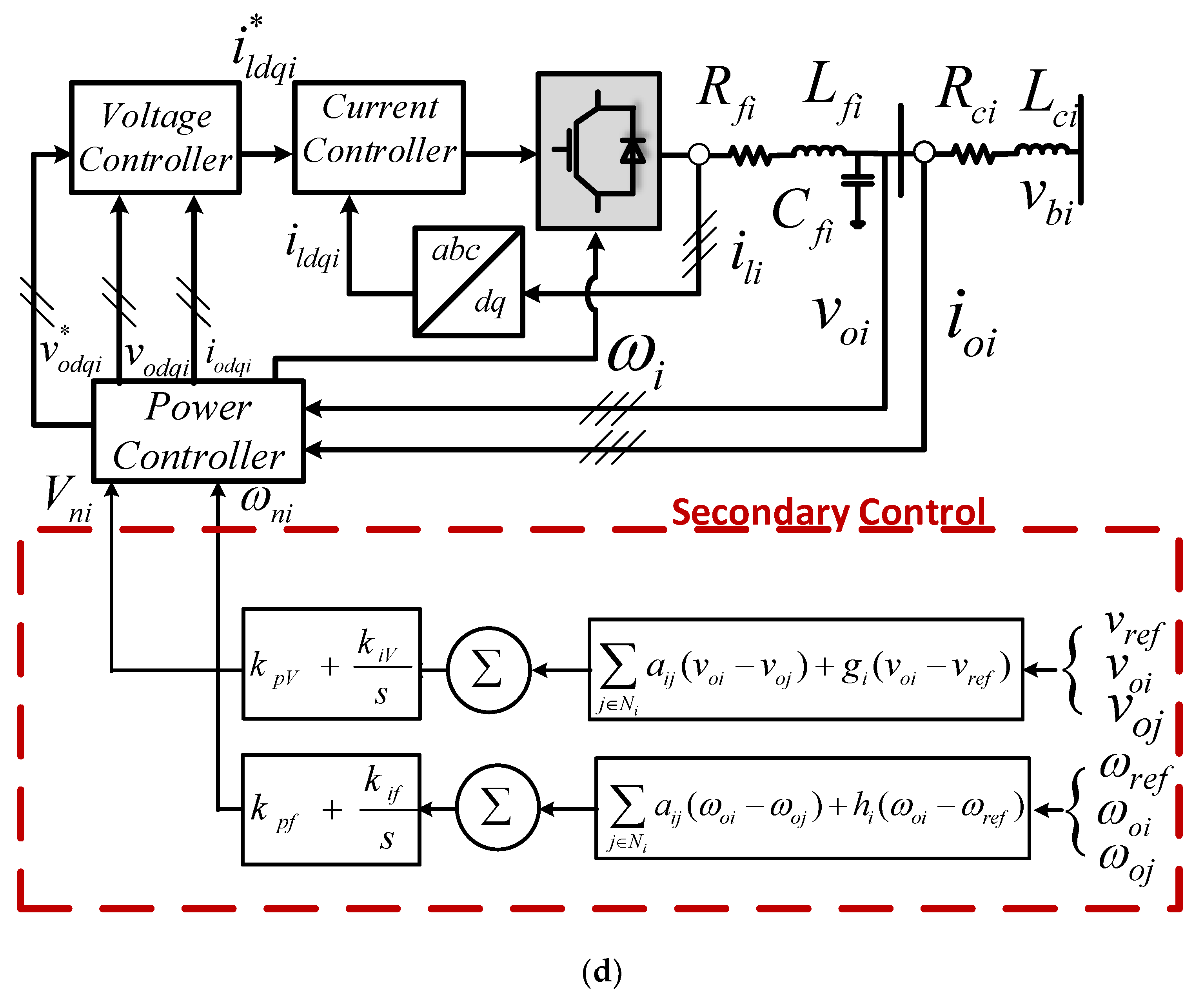
3.3. Secondary Controls: Voltage Magnitude and Frequency Restoration
4. Communication Network
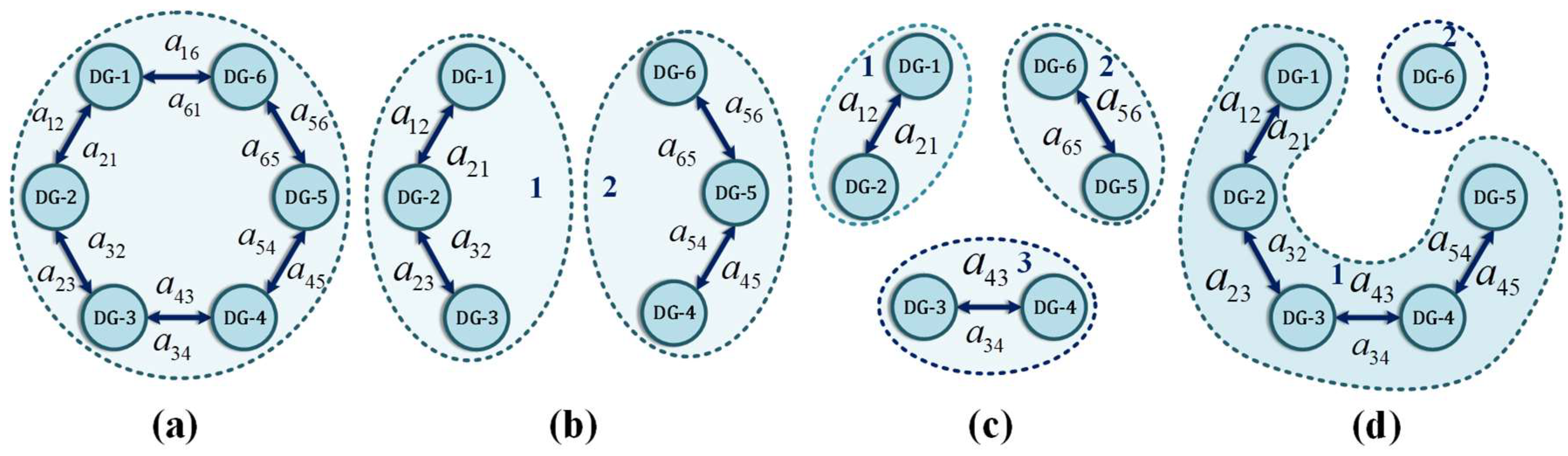
5. Virtual Sub-Islanding: Tertiary Controls
5.1. Cut Set Enumeration
5.2. Depth First Search Algorithm
6. Small Signal Analysis of Microgrid System
6.1. Zero Level Converter Control Model
6.2. Primary Power Sharing Control Model
6.3. Grid-Side Filter Model
6.4. Small Signal Model of the ith Inverter
6.5. Combined Model of N Inverters
6.6. Load and Network Model
6.7. Micro Grid Model
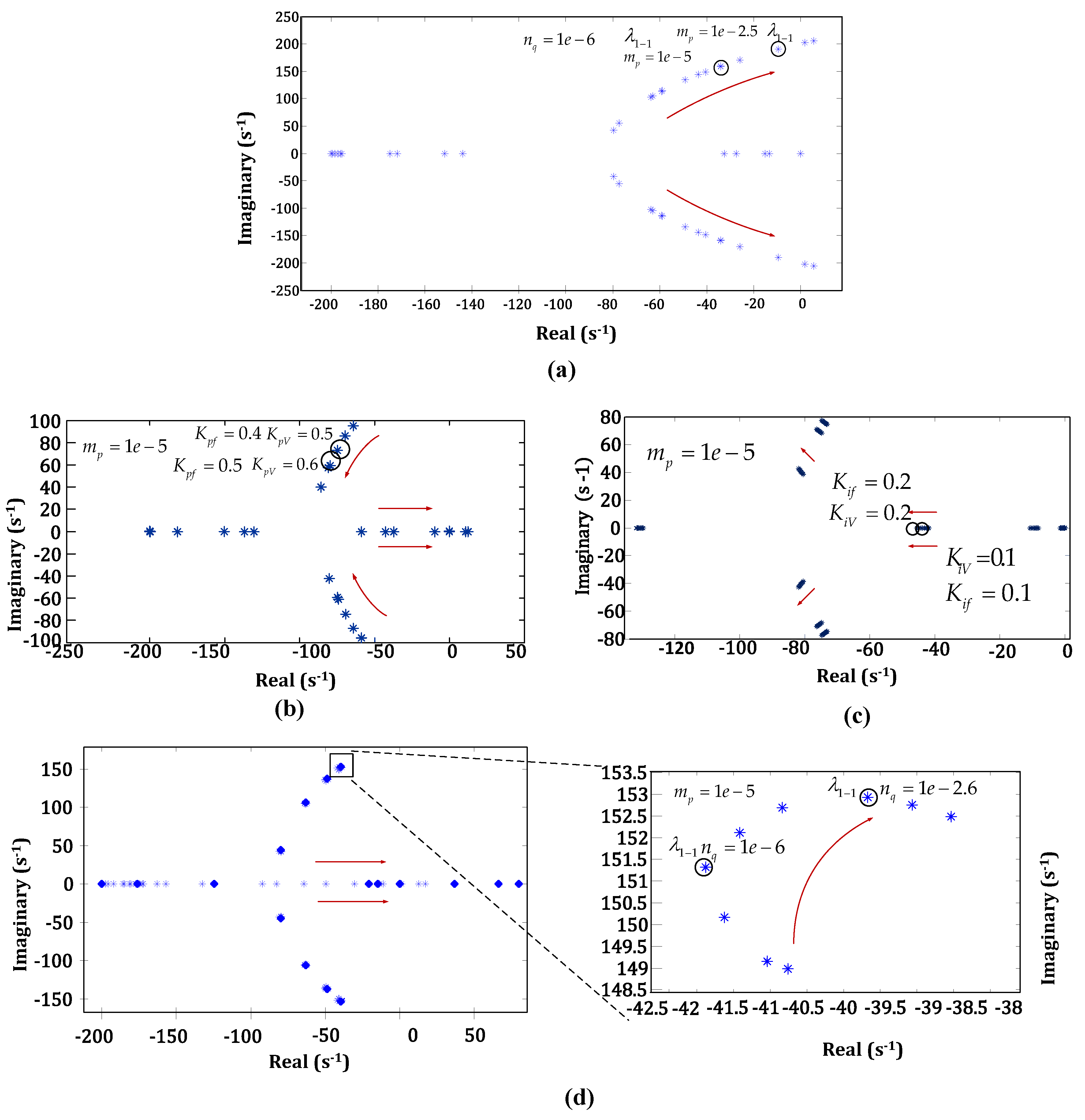
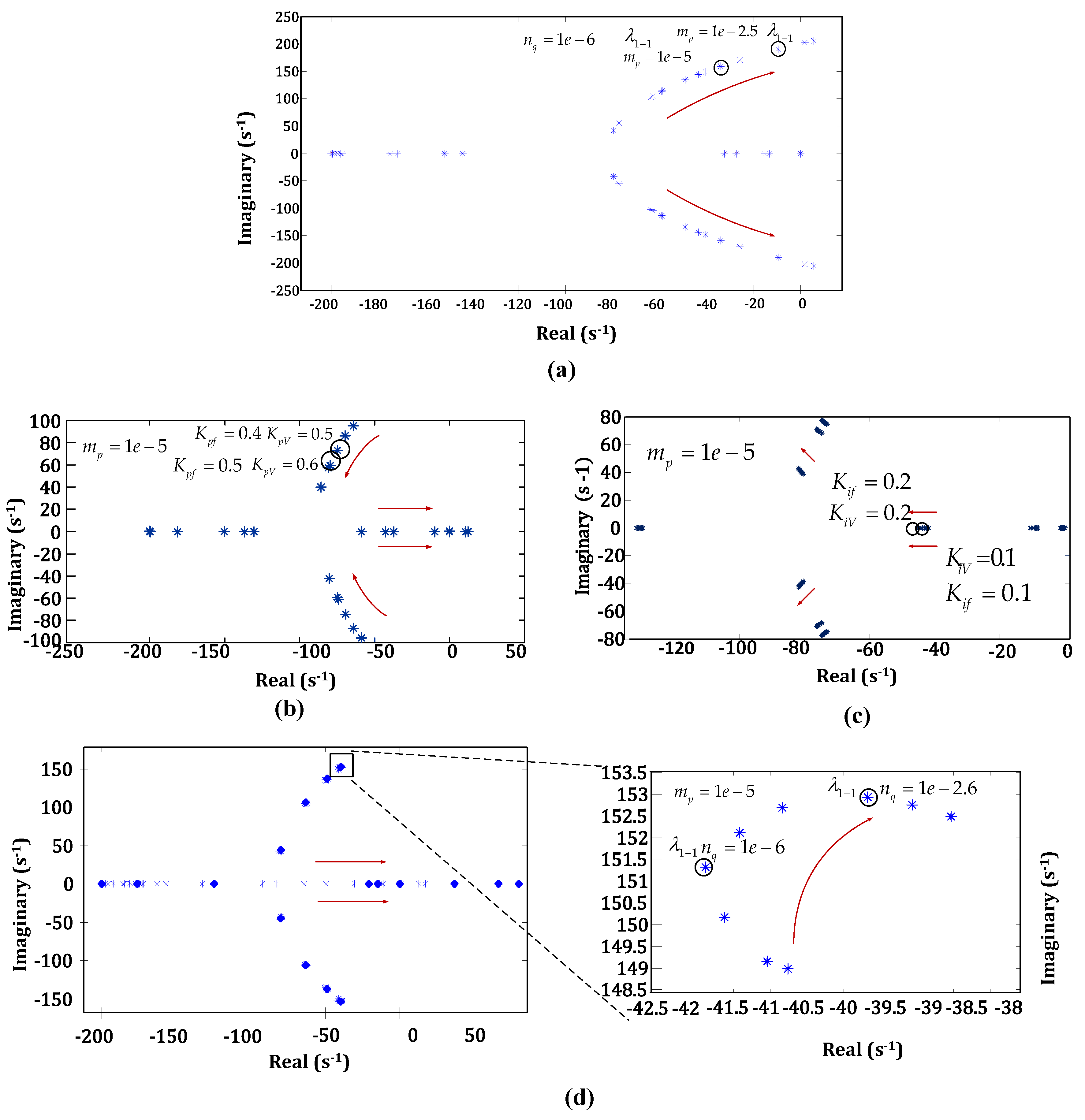
7. Stability and Sensitivity Analysis
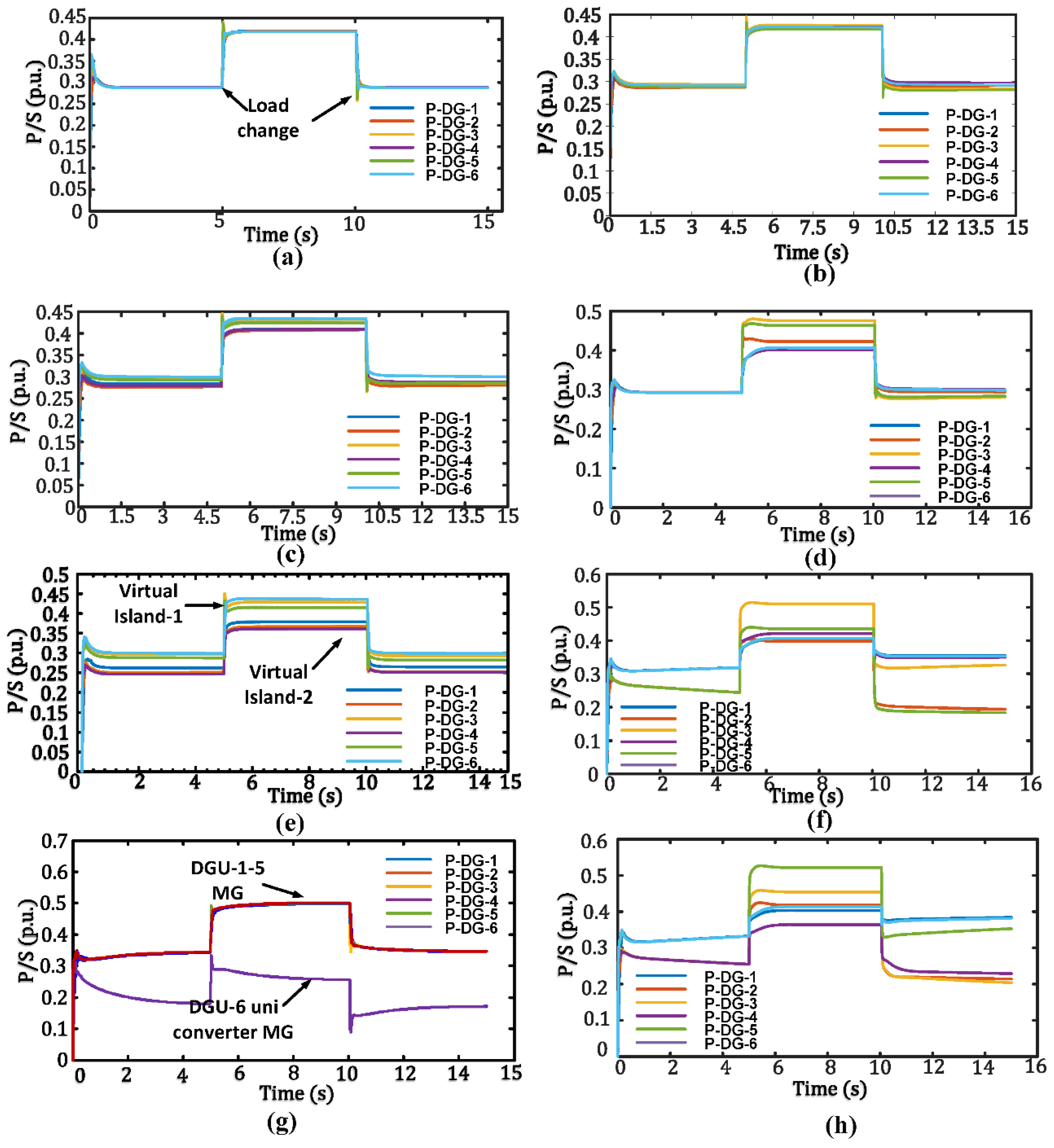
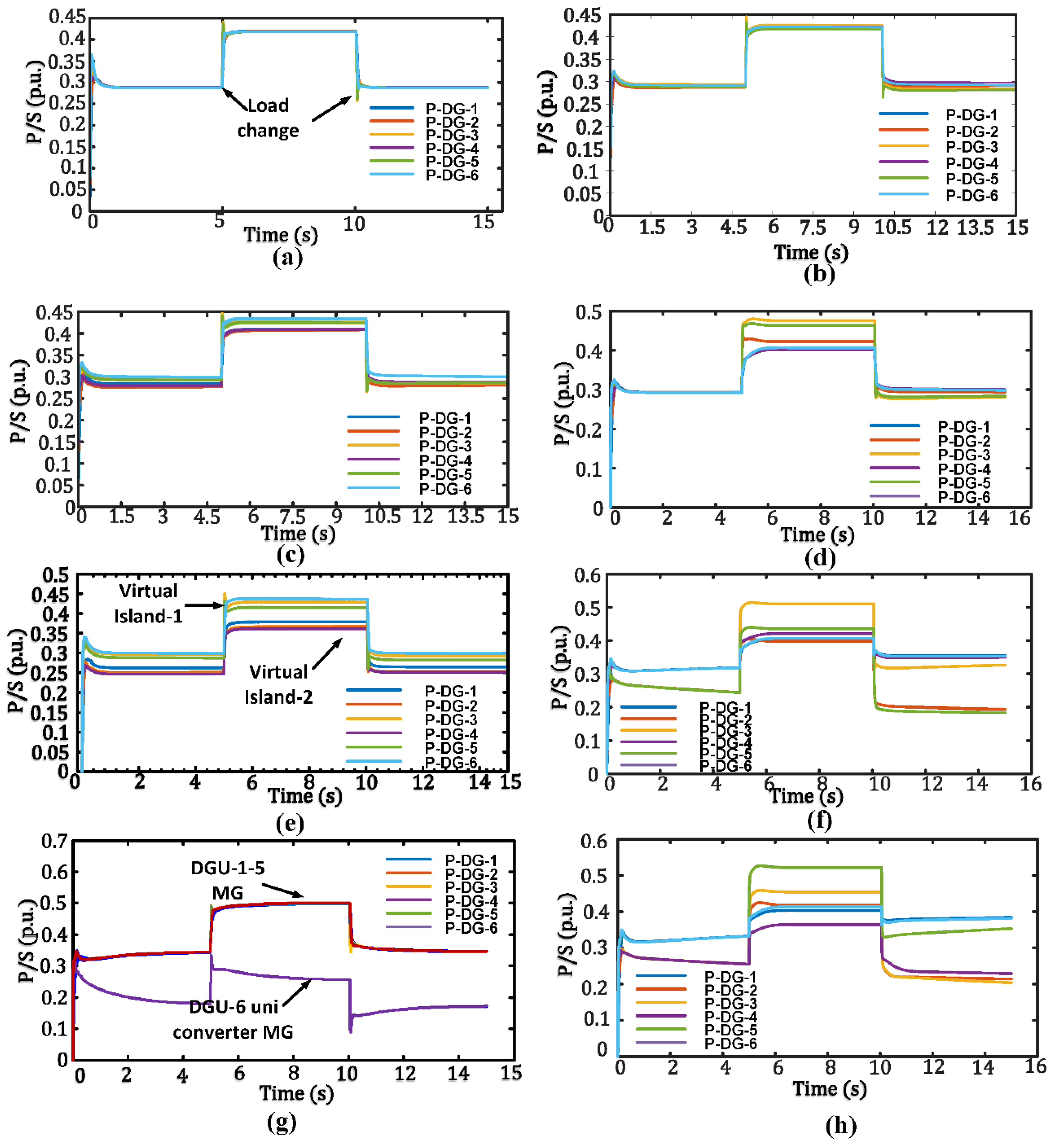
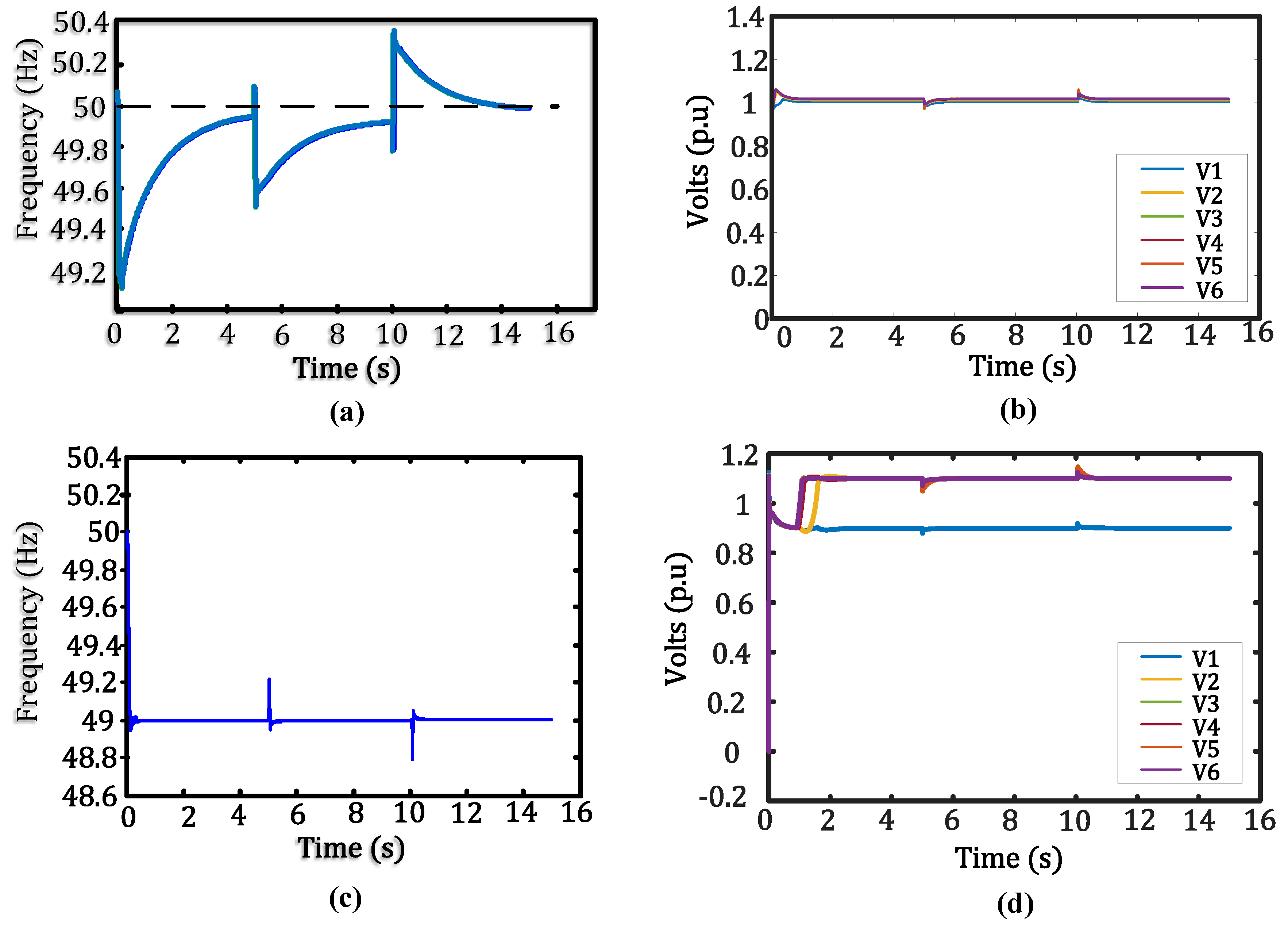
8. Evaluation with Case Studies
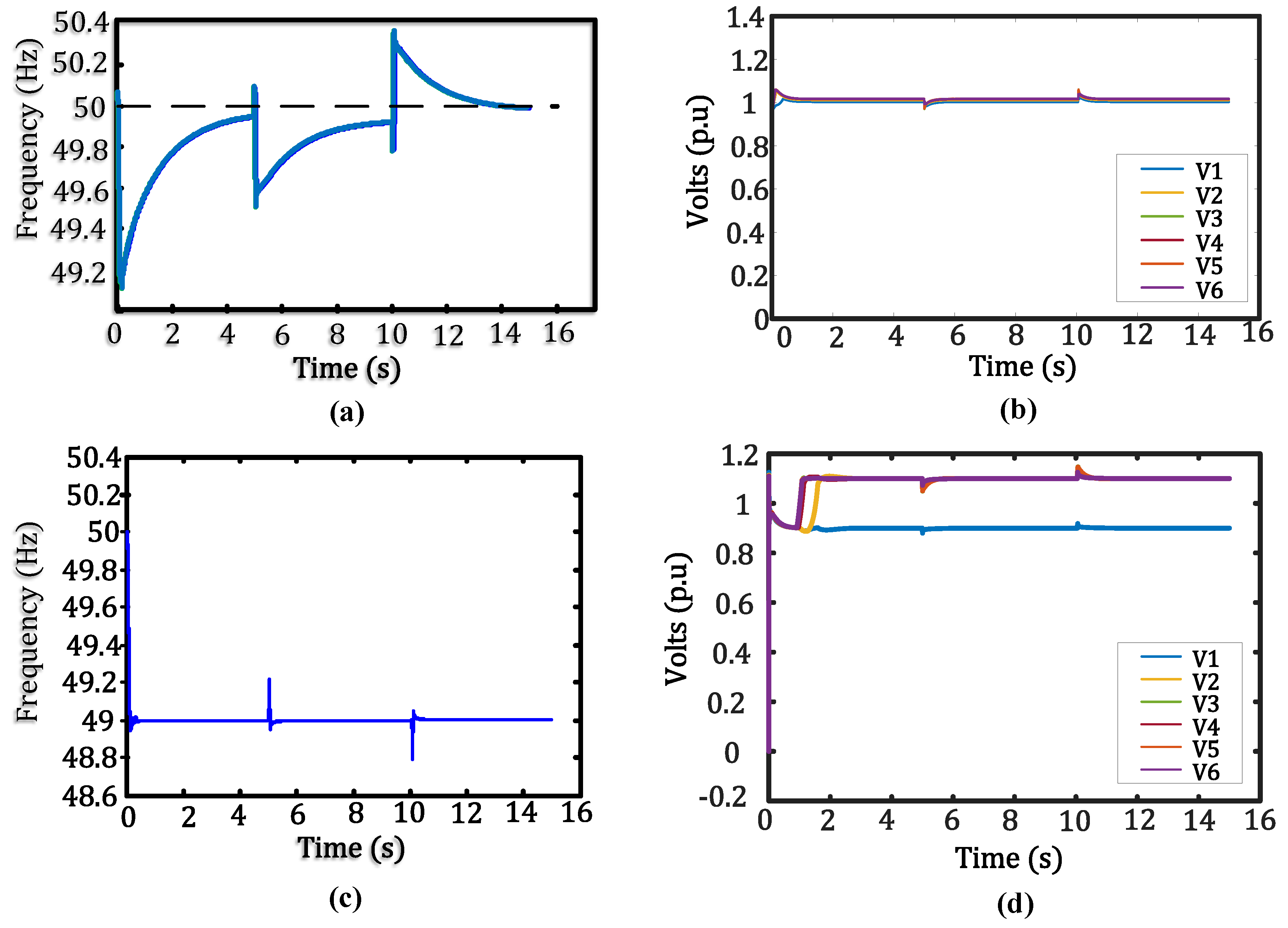
8.1. Case-1: Full Ring Sparse Connected Communication Network
8.2. Case-2: Two Sub Groups with Equal Number of Members
8.3. Case-3: Three or More Sub Groups with Equal Number of Members
8.4. Case-4: Two Sub Groups with Un-Equal Number of Members
8.5. Comparison with Previous Conventional Control Strategies
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. System Matrices
Appendix B. Algorithm
| Algorithm 1: Depth First Search for Graph , where adjacency list for |
| Initiate: A graph repressing comm. network topology for the Micro Grid. |
| Check: the connectivity using DFS and generate look up table. |
| BEGIN |
| Integer i; |
| Routine ; Comment vertex is the parent vertex for vertex in the spanning tree constructed |
| BEGIN |
| NUMBER : = ; |
| FOR is the adjacency list if DO |
| BEGIN |
| IF is not yet numbered THEN |
| BEGIN |
| Construct arc in |
| ; |
| END |
| ELSE IF NUMBER < NUMBER and |
| THEN construct arc in |
| END; |
| END; |
| ; |
| END; |
Appendix C
Appendix C.1. Adjacency Matrix
Appendix C.2. Degree Matrix
Appendix C.3. Laplacian Matrix
References
- Zeng, Z.; Yang, H.; Zhao, R. Study on small signal stability of microgrids: A review and a new approach. Renew. Sustain. Energy Rev. 2011, 15, 4818–4828. [Google Scholar] [CrossRef]
- Han, Y.; Li, H.; Shen, P.; Coelho, E.A.A.; Guerrero, J.M. Review of active and reactive power sharing strategies in hierarchical controlled microgrids. IEEE Trans. Power Electron. 2017, 32, 2427–2451. [Google Scholar] [CrossRef]
- Habib, S.; Kamran, M.; Rashid, U. Impact analysis of vehicle-to-grid technology and charging strategies of electric vehicles on distribution networks—A review. J. Power Sources 2015, 277, 205–214. [Google Scholar] [CrossRef]
- Hossain, M.A.; Pota, H.R.; Issa, W.; Hossain, M.J. Overview of AC microgrid controls with inverter-interfaced generations. Energies 2017, 10, 1300. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; de Vicuna, L.G.; Castilla, M.; Miret, J. Decentralized control for parallel operation of distributed generation inverters using resistive output impedance. IEEE Trans. Ind. Electron. 2007, 54, 994–1004. [Google Scholar] [CrossRef]
- Guerrero, J.M.; De Vicuña, L.G.; Matas, J.; Miret, J.; Castilla, M. Output impedance design of parallel-connected UPS inverters. IEEE Int. Symp. Ind. Electron. 2004, 2, 1123–1128. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; De Vicuña, L.G.; Castilla, M.; Miret, J. Wireless-control strategy for parallel operation of distributed-generation inverters. IEEE Trans. Ind. Electron. 2006, 53, 1461–1470. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vásquez, J.C.; Matas, J.; Castilla, M.; García de Vicuna, L. Control strategy for flexible microgrid-based on parallel line-interactive UPS systems. IEEE Trans. Ind. Electron. 2009, 56, 726–736. [Google Scholar] [CrossRef]
- De Brabandere, K.; Bolsens, B.; Van Den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A voltage and frequency droop control method for parallel inverters. IEEE Trans. Power Electron. 2007, 4, 1107–1115. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of power sharing control strategies for islanding operation of AC microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.L.; Loh, P.C. Advanced control architectures for intelligent microgridspart I: Decentralized and hierarchical control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]
- Bidram, A.; Member, S.; Davoudi, A.; Lewis, F.L.; Guerrero, J.M.; Member, S. Distributed cooperative secondary control of microgrids using feedback linearization. IEEE Trans. Power Syst. 2013, 28, 3462–3470. [Google Scholar] [CrossRef]
- Kordkheili, H.; Banejad, M.; Kalat, A.; Pouresmaeil, E.; Catalão, J. Direct-lyapunov-based control scheme for voltage regulation in a three-phase islanded microgrid with renewable energy sources. Energies 2018, 11, 1161. [Google Scholar] [CrossRef]
- Han, H.; Li, L.; Wang, L.; Su, M.; Zhao, Y.; Guerrero, J.M. A novel decentralized economic operation in islanded AC microgrids. Energies 2017, 10, 804. [Google Scholar] [CrossRef]
- Lu, L.Y.; Chu, C.C. Consensus-based secondary frequency and voltage droop control of virtual synchronous generators for isolated AC micro-grids. IEEE J. Emerg. Sel. Top. Circuits Syst. 2015, 5, 443–455. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Li, C. Distributed finite-time cooperative control of droop-controlled microgrids under switching topology. IET Renew. Power Gener. 2017, 11, 707–714. [Google Scholar] [CrossRef]
- Wang, H.; Zeng, G.; Dai, Y.; Bi, D.; Sun, J.; Xie, X. Design of a Fractional Order Frequency PID Controller for an Islanded Microgrid : A multi-objective extremal optimization mathod. Energies 2017, 10, 1502. [Google Scholar] [CrossRef]
- Lewis, F.L.; Qu, Z.; Davoudi, A.; Bidram, A. Secondary control of microgrids based on distributed cooperative control of multi-agent systems. IET Gener. Transm. Distrib. 2013, 7, 822–831. [Google Scholar] [CrossRef]
- Liu, W.; Gu, W.; Xu, Y.; Wang, Y.; Zhang, K. General distributed secondary control for multi-microgrids with both PQ-controlled and droop-controlled distributed generators. IET Gener. Transm. Distrib. 2017, 11, 707–718. [Google Scholar] [CrossRef]
- Zuo, S.; Davoudi, A.; Song, Y.; Lewis, F.L. Distributed finite-time voltage and frequency restoration in islanded AC microgrids. IEEE Trans. Ind. Electron. 2016, 63, 5988–5997. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Mao, J.; Song, Y.D. Distributed secondary voltage and frequency restoration control of droop-controlled inverter-based microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4355–4364. [Google Scholar] [CrossRef]
- Lu, X.; Yu, X.; Lai, J.; Guerrero, J.M.; Zhou, H. Distributed secondary voltage and frequency control for islanded microgrids with uncertain communication Links. IEEE Trans. Ind. Inform. 2017, 13, 448–460. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, X.; Chen, Z.; Blaabjerg, F. Distributed optimal control of reactive power and voltage in islanded microgrids. IEEE Trans. Ind. Appl. 2017, 53, 340–349. [Google Scholar] [CrossRef]
- Schiffer, J.; Seel, T.; Raisch, J.; Sezi, T. Voltage stability and reactive power sharing in inverter-based microgrids with consensus-based distributed voltage control. IEEE Trans. Control Syst. Technol. 2016, 24, 96–109. [Google Scholar] [CrossRef]
- Guan, Y.; Meng, L.; Li, C.; Vasquez, J.; Guerrero, J. A dynamic consensus algorithm to adjust virtual impedance loops for discharge rate balancing of AC microgrid energy storage units. IEEE Trans. Smart Grid 2017, 3053. [Google Scholar] [CrossRef]
- Bidram, A.; Nasirian, V.; Davoudi, A.; Lewis, F.L. Droop-free distributed control of AC microgrids. Adv. Ind. Control 2017, 31, 141–171. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; De Vicuña, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids - A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Bidram, A.; Nasirian, V.; Davoudi, A.; Lewis, F.L. Cooperative Synchronization in Distributed Microgrid Control, 1st ed.; Grimble, M.J., Ed.; Springer International Publishing: Basel, Switzerland, 2017; ISBN 978-3-319-50807-8. [Google Scholar]
- Coelho, E.A.A.; Wu, D.; Guerrero, J.M.; Vasquez, J.C.; Dragičević, T.; Stefanović, Č.; Popovski, P. Small-Signal Analysis of the Microgrid Secondary Control Considering a Communication Time Delay. IEEE Trans. Ind. Electron. 2016, 63, 6257–6269. [Google Scholar] [CrossRef] [Green Version]
- Char, J.P. Circuit, cutset and path enumeration, and other applications of edge-numbering convention. Proc. Inst. Electr. Eng. 1970, 117, 532–538. [Google Scholar] [CrossRef]
- Char, J.P. Generation and realisation of loop and cutsets. Proc. Inst. Electr. Eng. 1969, 116, 2001–2008. [Google Scholar] [CrossRef]
- Gibbons, A. Algoritmic Grpah Theory; Cambridge Univeristy Press: Cambridge, UK, 1985. [Google Scholar]
- Egerstedt, M.; Mesbahi, M. Graph Theoretic Method in Multiagent Networks; Princeton University Press: Princeton, NJ, USA, 2010; ISBN 9780691140612. [Google Scholar]
- Lewis, F.L.; Zhang, H.; Hengster-Movric, K.; Das, A. Cooperative Control of Multi Agent Systems, 1st ed.; Springer International Publishing: Basel, Switzerland, 2014; Volume 53, ISBN 9781447155737. [Google Scholar]
- Lee, K.K.; Chen, C.E. An Eigen-based approach for enhancing matrix inversion approximation in massive MIMO systems. IEEE Trans. Veh. Technol. 2017, 66, 5483–5487. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; AL-Sunni, F.M. Control and Optimization of Distributed Generation Systems, 1st ed.; Springer International Publishing: Basel, Switzerland, 2015; ISBN 978-3-319-16909-5. [Google Scholar]
- Pogaku, N.; Prodanović, M.; Green, T.C. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Yu, K.; Ai, Q.; Wang, S.; Ni, J.; Lv, T. Analysis and optimization of droop controller for microgrid system based on small-signal dynamic model. IEEE Trans. Smart Grid 2016, 7, 695–705. [Google Scholar] [CrossRef]
- Chen, C.-T. Linear System Theory and Design, 3rd ed.; Oxford University Press: New York, NY, USA, 1999; ISBN 0195117778. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Lf | 1.35 mH | mp | 4.5 × 10 −6 |
| Rf | 0.1 Ω | nq | 1× 10 −6 |
| Cf | 25 µF | Kpf | 0.4 |
| Lc | 1.35 mH | Kif | 0.5 |
| Rc | 0.05 Ω | KpV | 0.5 |
| Rline | 0.1 Ω | KiV | 0.3 |
| Lline | 0.5 mH | F | 1 |
| fnom | 60 Hz | ωc | 60 Hz |
| Vnom | 415 VL-L |
| Bus. No. | Directly Connected Bus Load | |
|---|---|---|
| P (p.u.) | Q (p.u.) | |
| 1. | 0 | 0 |
| 2. | 0.3 | 0.3 |
| 3. | 0.25 | 0.25 |
| 4. | 0.25 | 0.25 |
| 5. | 0.25 | 0.25 |
| 6. | 0.25 | 0.25 |
| 7. | 0 | 0 |
| Cases | Description | Secondary Consensus Gain | Primary Droop Gain | |||
|---|---|---|---|---|---|---|
| 1. | Full ring network | Voltage | KpV | 0.5 | mp | 1.0 × 10−10 |
| KiV | 0.1 | |||||
| Frequency | Kpf | 0.4 | nq | 1.0 × 10−7 | ||
| Kif | 0.1 | |||||
| 2. | Two symmetrical islands formed | Voltage | KpV | 0.7 | mp | 1.0 × 10−5 |
| KiV | 0.2 | |||||
| Frequency | Kpf | 0.8 | nq | 1.0 × 10−3 | ||
| Kif | 0.2 | |||||
| 3. | Three symmetrical islands formed | Voltage | KpV | 1.2 | mp | 2.5 × 10−3 |
| KiV | 0.3 | |||||
| Frequency | Kpf | 1.5 | nq | 1.0 × 10−3 | ||
| Kif | 0.2 | |||||
| 4. | Two asymmetrical islands formed | Voltage | KpV | 3.0 | mp | 2.0 × 10−4 |
| KiV | 0.5 | |||||
| Frequency | Kpf | 2.2 | nq | 1.0 × 10−4 | ||
| Kif | 0.5 | |||||
| Sr. No. | Control Parameters | ||
|---|---|---|---|
| 1. | Droop Gains | Min. | Max. |
| mp | 1 × 10−10 | 1 × 10−3 | |
| nq | 1 × 10−7 | 1 × 10−3 | |
| 2. | Consensus frequency | ||
| kpf | 0.4 | 2.5 | |
| kif | 0.1 | 0.6 | |
| 3. | Consensus voltage | ||
| kpV | 0.5 | 3.5 | |
| kiV | 0.1 | 0.7 | |
| Sr. No. | Parameters | Proposed Method | Distributed Estimation-Based Methods [22,25,26] | Consensus-Based Methods [12,20,21,23] |
|---|---|---|---|---|
| 1. | Maximum Active power mismatch | 0.03 p.u. | 0.05 p.u. | 0.10 p.u. |
| 2. | Max Voltage variation | 0.01 p.u. | 0.1 p.u. | 0.2 p.u. |
| 3. | Max frequency variation | 0.4 Hz (4.0 × 10−5 Hz/VA) | 0.2 Hz (2.0 × 10−5 Hz/VA) | 1 Hz (1.0 × 10−5 Hz/VA) |
| 4. | Convergence time (frequency) | 4 s | 10 s | No convergence if links severed |
| 5. | Convergence time (voltage) | 1 s | 7 s | No convergence if links severed |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hashmi, K.; Mansoor Khan, M.; Jiang, H.; Umair Shahid, M.; Habib, S.; Talib Faiz, M.; Tang, H. A Virtual Micro-Islanding-Based Control Paradigm for Renewable Microgrids. Electronics 2018, 7, 105. https://doi.org/10.3390/electronics7070105
Hashmi K, Mansoor Khan M, Jiang H, Umair Shahid M, Habib S, Talib Faiz M, Tang H. A Virtual Micro-Islanding-Based Control Paradigm for Renewable Microgrids. Electronics. 2018; 7(7):105. https://doi.org/10.3390/electronics7070105
Chicago/Turabian StyleHashmi, Khurram, Muhammad Mansoor Khan, Huawei Jiang, Muhammad Umair Shahid, Salman Habib, Muhammad Talib Faiz, and Houjun Tang. 2018. "A Virtual Micro-Islanding-Based Control Paradigm for Renewable Microgrids" Electronics 7, no. 7: 105. https://doi.org/10.3390/electronics7070105