Closing the Wearable Gap: Mobile Systems for Kinematic Signal Monitoring of the Foot and Ankle

 ,
,  , ,
, ,  , and
, and
Abstract
:1. Introduction
1.1. Interviews—Two Concerns
1.1.1. Rebuilding Trust
1.1.2. From the Ground Up
1.2. Dynamic Range of Motion and Sensor Placement
- Liquid metal sensors (specifically those manufactured by Liquid Wire [66]), which are designed for soft-robotics applications, are experimentally shown to be suitable for capturing ankle complex movements for dorsiflexion, plantar flexion, inversion, and eversion.
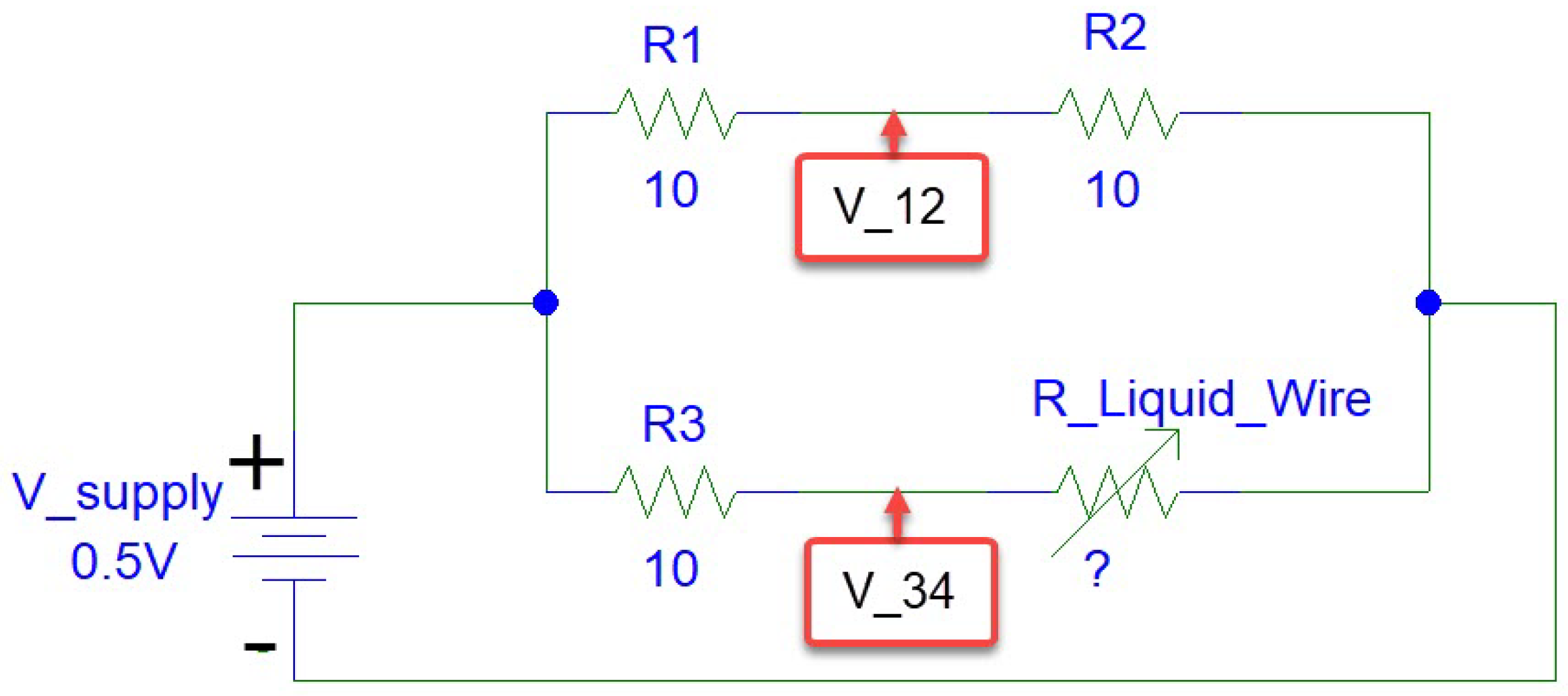
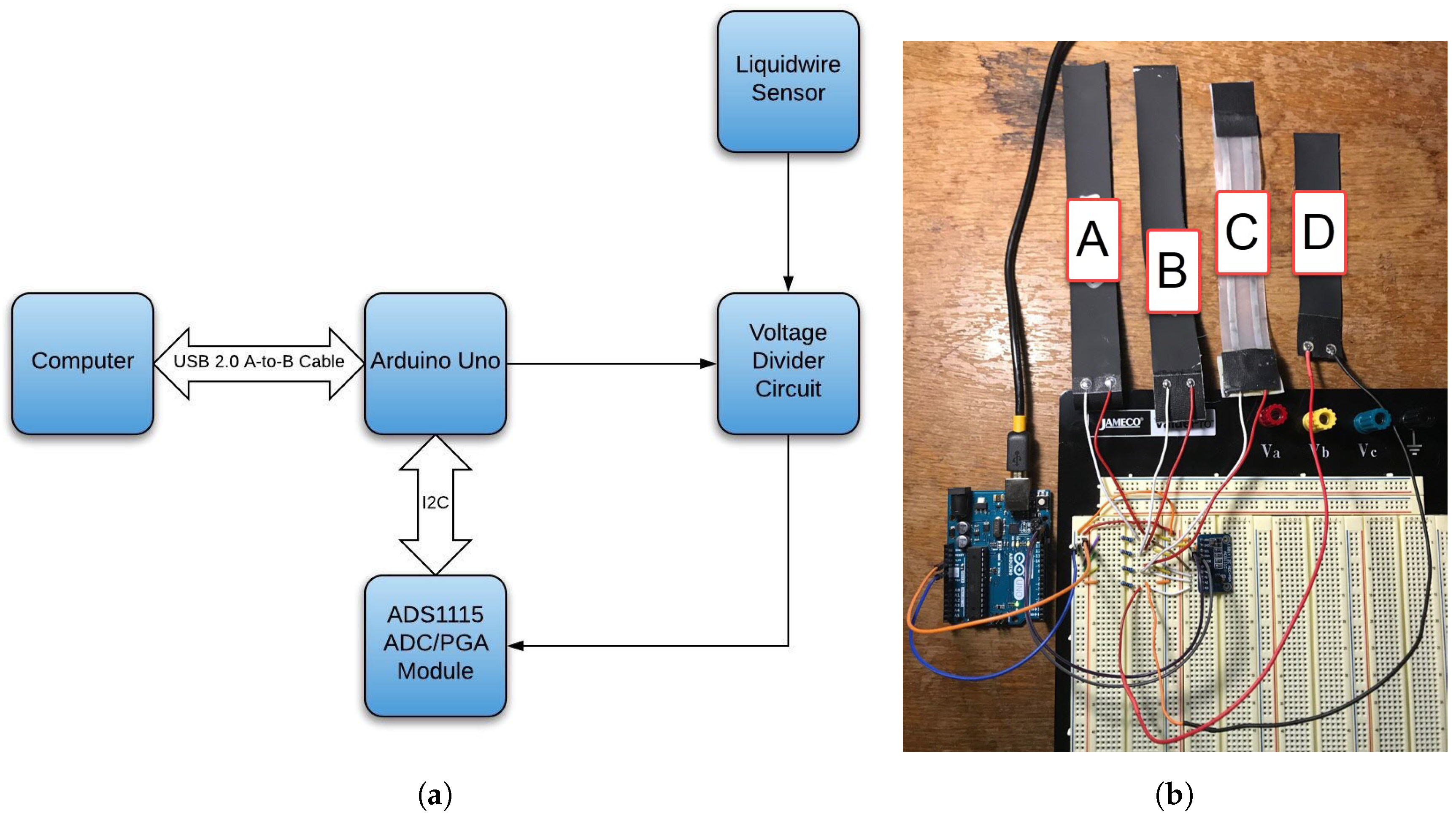
- A simple microprocessor-based computing unit prototype designed to accurately measure the Liquid Wire sensors resistances is provided.
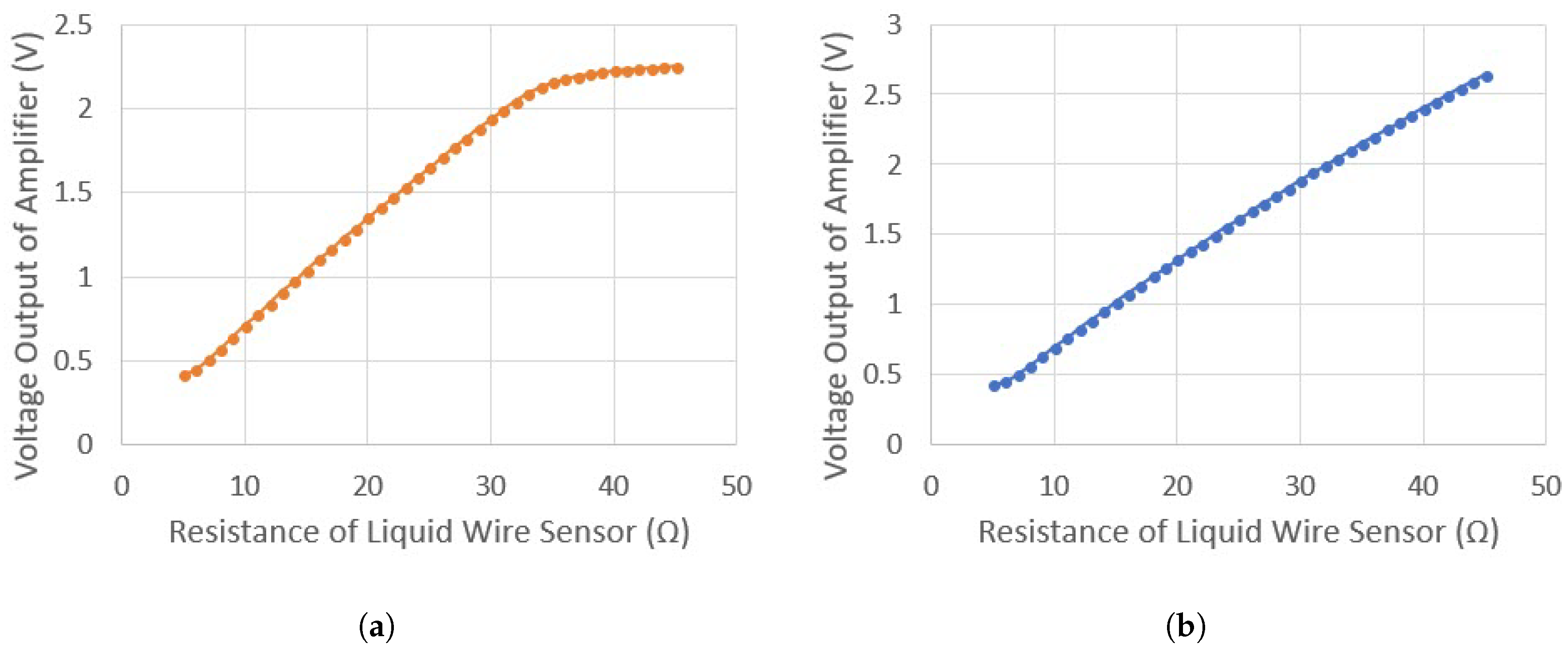
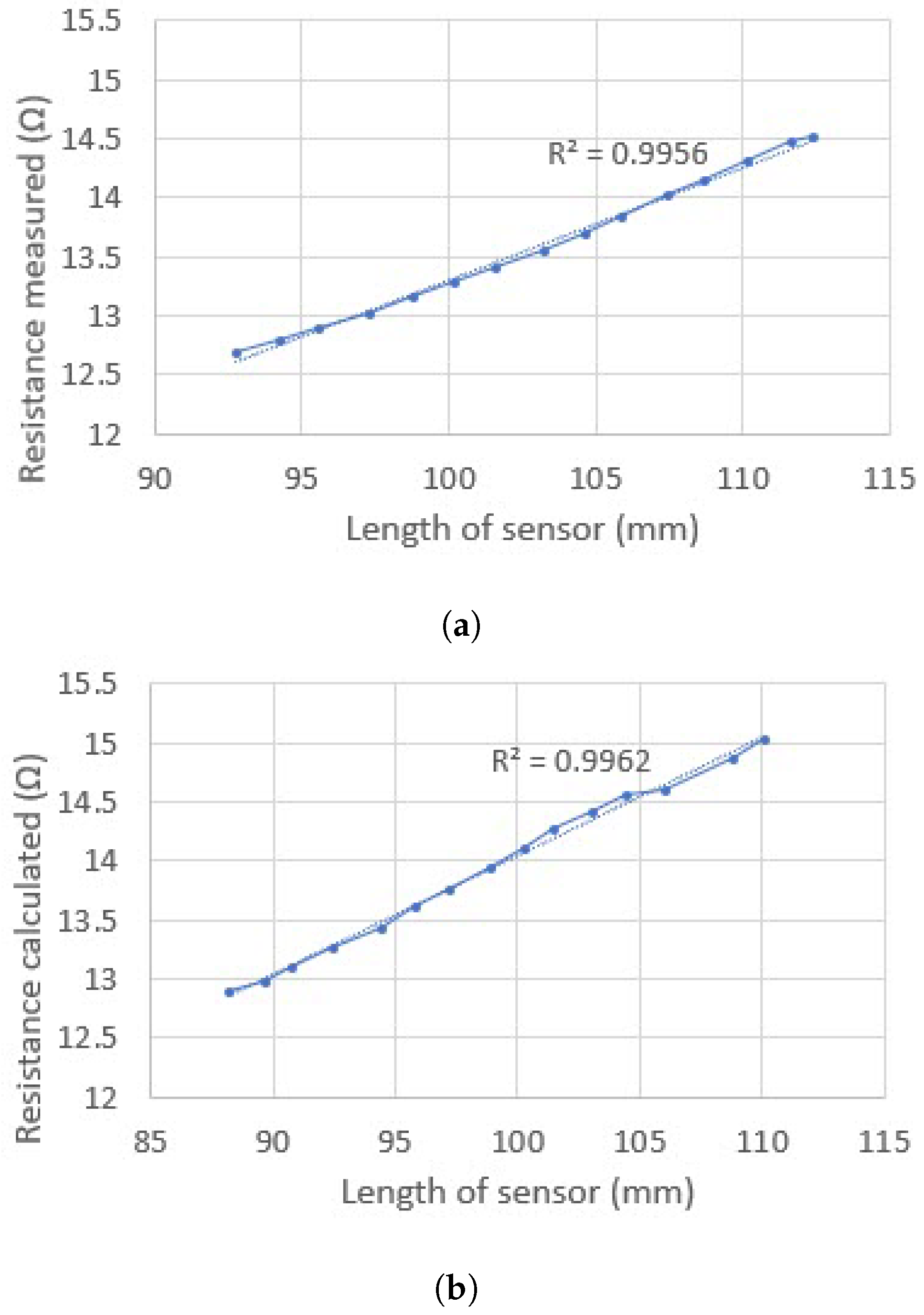
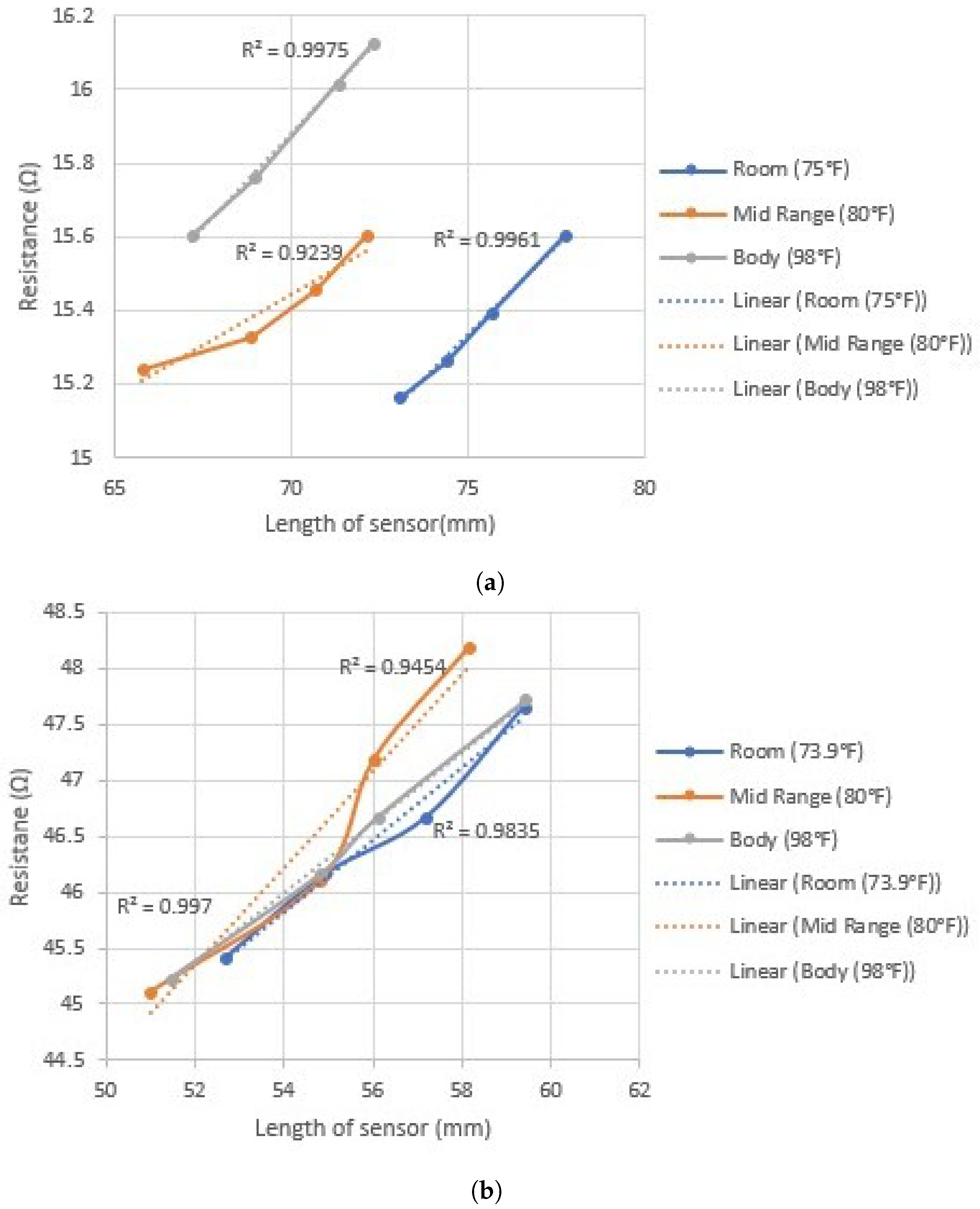
- Liquid Wire sensors, which vary their resistance under stretching, are experimentally shown to provide a linear relationship versus stretching distance and temperature.
- Linear regression models were used to relate the resistance measurements into ankle angle measurements.
- A detailed summary of the state-of-the-art in wearable solutions is provided which shows that there currently is not another wearable solution capable of making ankle measurements (Table 1).
2. Materials and Methods
2.1. Liquid Wire Testing
2.1.1. Testing Goals
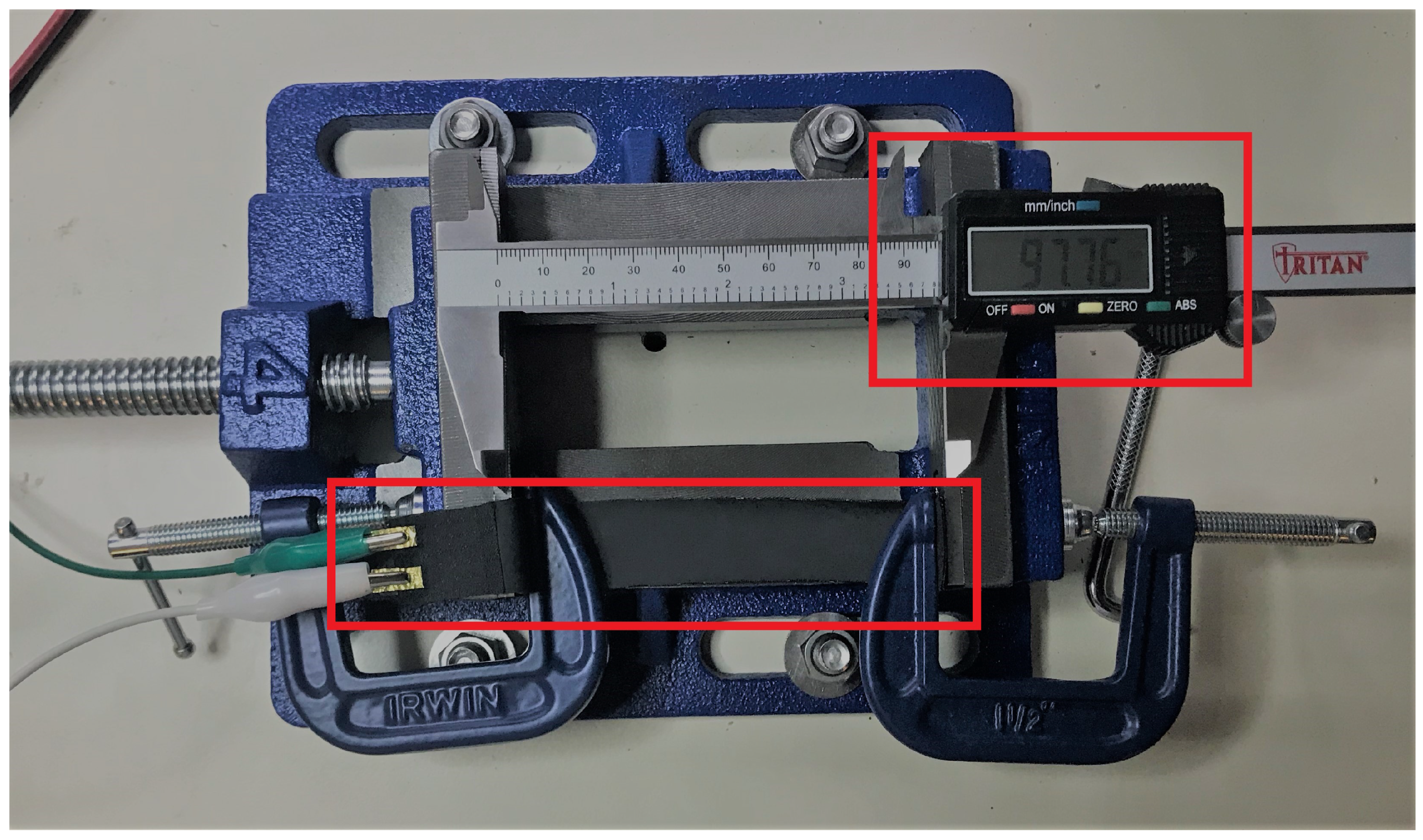
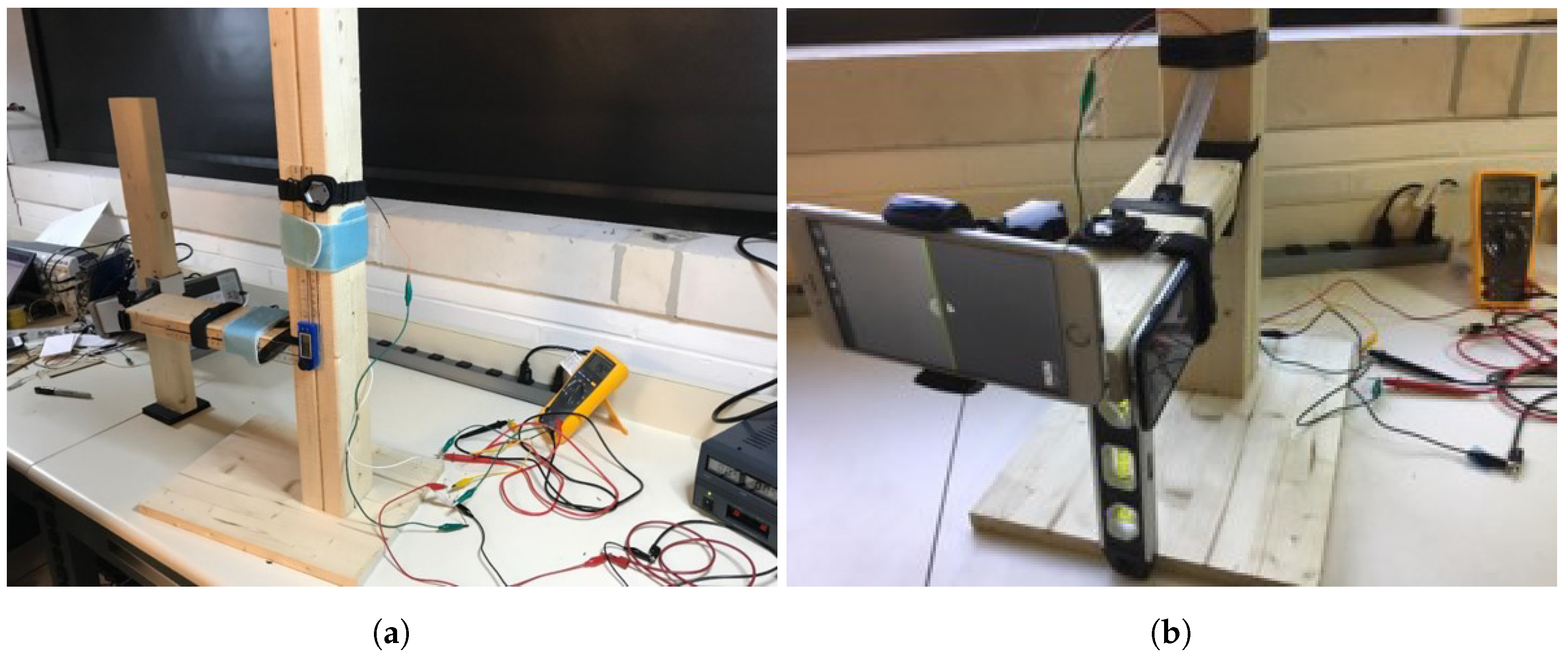
2.1.2. Equipment
2.1.3. Test Procedure
Linearity Testing
Temperature Testing
Microprocessor Testing
2.2. Static Model Testing
2.2.1. Testing Goals
2.2.2. Equipment
2.2.3. Test Procedure
3. Results and Discussion
3.1. Liquid Wire Testing Results
3.1.1. Linearity Testing Results
3.1.2. Temperature Testing Results
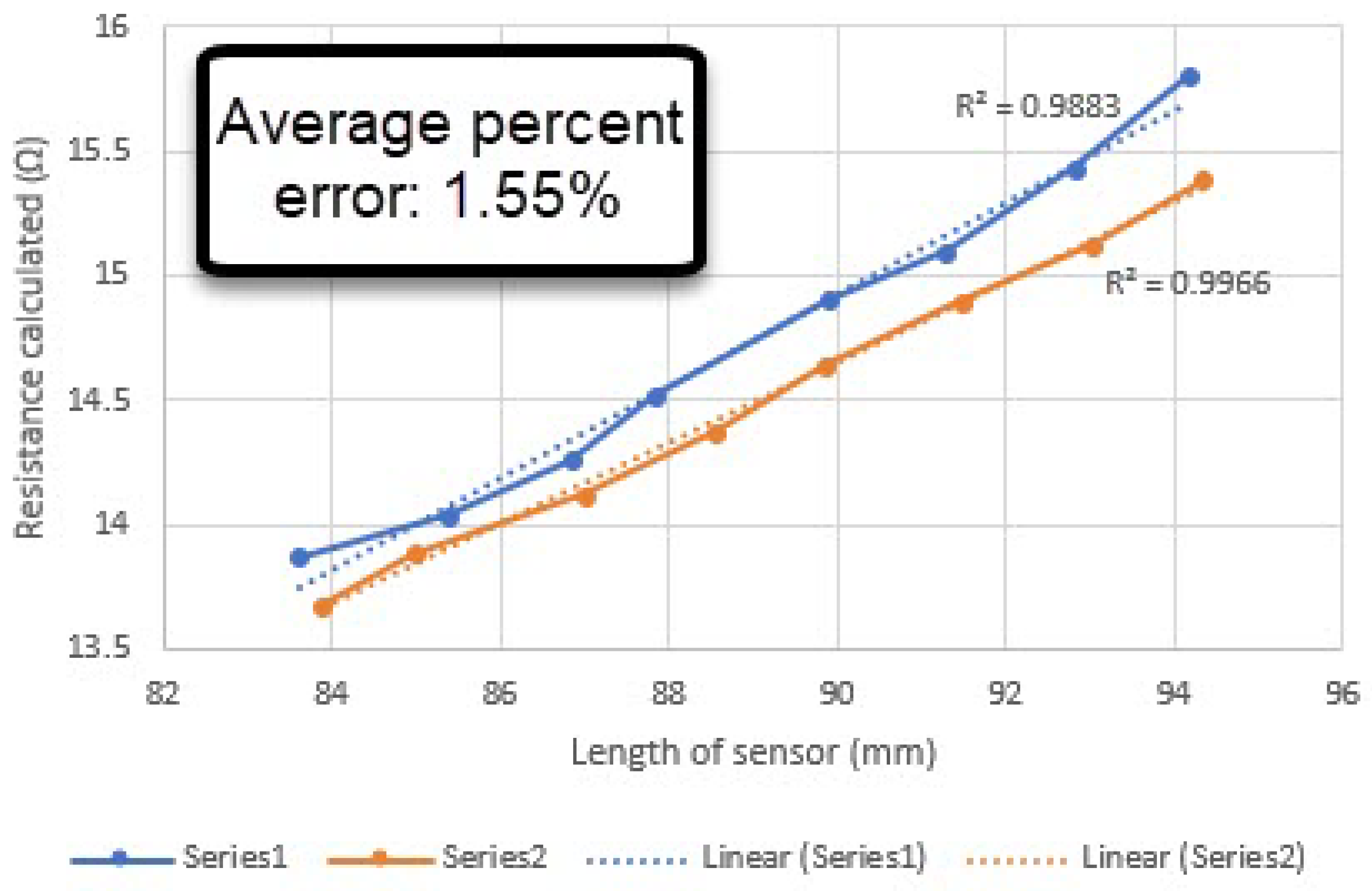
3.1.3. Computing Unit Testing Results
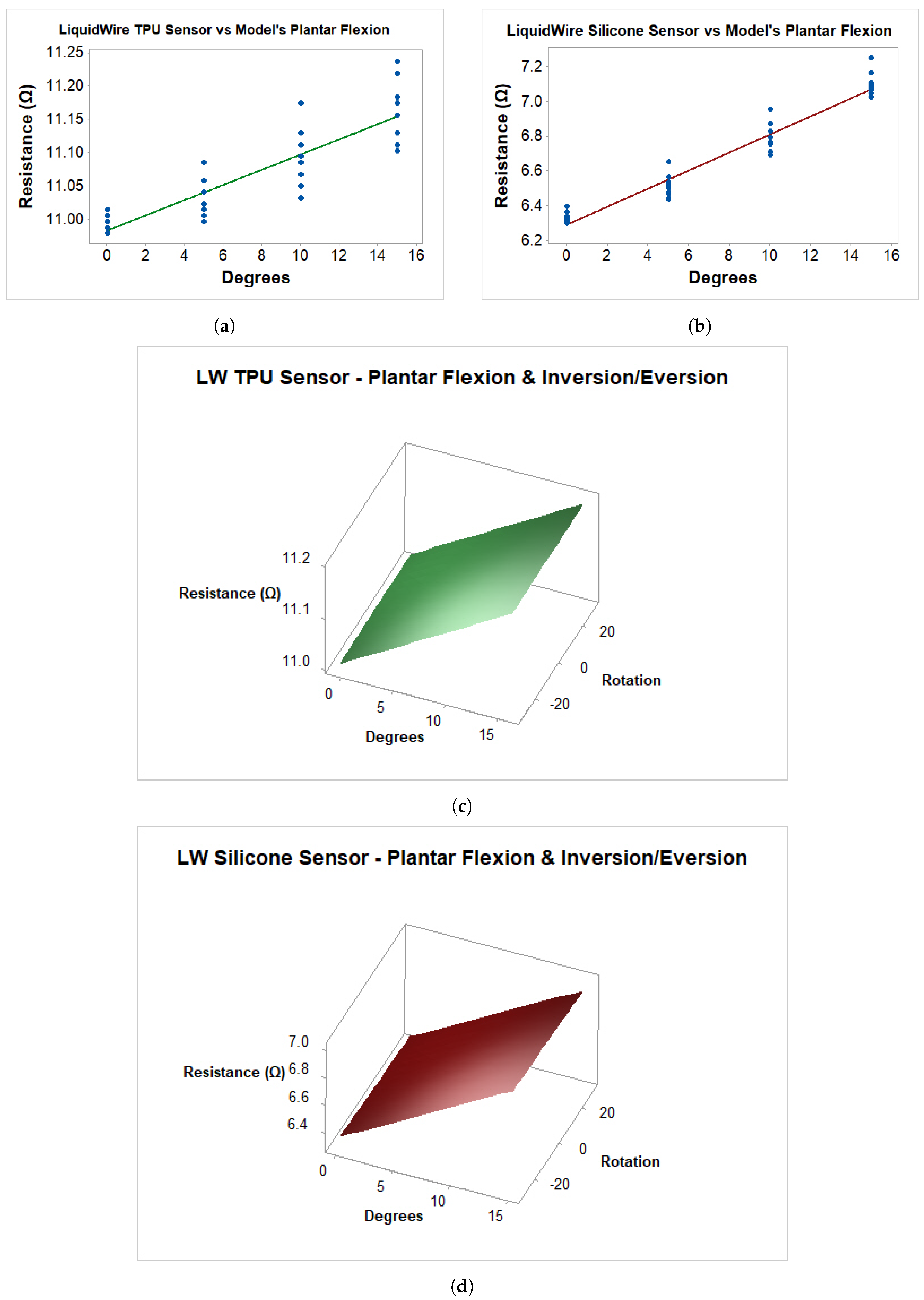
3.2. Estimating Angles from Liquid Wire Measurements Testing Results
4. Conclusions
4.1. Limitations
4.2. Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Fong, D.T.P.; Chan, Y.Y. The use of wearable inertial motion sensors in human lower limb biomechanics studies: A systematic review. Sensors 2010, 10, 11556–11565. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mengüç, Y.; Park, Y.L.; Martinez-Villalpando, E.; Aubin, P.; Zisook, M.; Stirling, L.; Wood, R.J.; Walsh, C.J. Soft wearable motion sensing suit for lower limb biomechanics measurements. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 5309–5316. [Google Scholar]
- Chan, M.; Estève, D.; Fourniols, J.Y.; Escriba, C.; Campo, E. Smart wearable systems: Current status and future challenges. Artif. Intell. Med. 2012, 56, 137–156. [Google Scholar] [CrossRef] [PubMed]
- Lara, O.D.; Labrador, M.A. A survey on human activity recognition using wearable sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef]
- Foerster, F.; Smeja, M.; Fahrenberg, J. Detection of posture and motion by accelerometry: A validation study in ambulatory monitoring. Comput. Hum. Behav. 1999, 15, 571–583. [Google Scholar] [CrossRef]
- Espinosa, H.G.; Lee, J.; James, D.A. The inertial sensor: A base platform for wider adoption in sports science applications. J. Fit. Res. 2015, 4, 13–20. [Google Scholar]
- Cooper, G.; Sheret, I.; McMillian, L.; Siliverdis, K.; Sha, N.; Hodgins, D.; Kenney, L.; Howard, D. Inertial sensor-based knee flexion/extension angle estimation. J. Biomech. 2009, 42, 2678–2685. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Filippeschi, A.; Schmitz, N.; Miezal, M.; Bleser, G.; Ruffaldi, E.; Stricker, D. Survey of Motion Tracking Methods Based on Inertial Sensors: A Focus on Upper Limb Human Motion. Sensors 2017, 17, 1257. [Google Scholar] [CrossRef] [PubMed]
- O’Donovan, K.J.; Kamnik, R.; O’Keeffe, D.T.; Lyons, G.M. An inertial and magnetic sensor based technique for joint angle measurement. J. Biomech. 2007, 40, 2604–2611. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.; Liu, T.; Shibata, K.; Inoue, Y.; Zheng, R. Novel approach to ambulatory assessment of human segmental orientation on a wearable sensor system. J. Biomech. 2009, 42, 2747–2752. [Google Scholar] [CrossRef] [PubMed]
- Kavanagh, J.J.; Morrison, S.; James, D.A.; Barrett, R. Reliability of segmental accelerations measured using a new wireless gait analysis system. J. Biomech. 2006, 39, 2863–2872. [Google Scholar] [CrossRef] [PubMed]
- Luinge, H.J.; Veltink, P.H. Measuring orientation of human body segments using miniature gyroscopes and accelerometers. Med. Biol. Eng. Comput. 2005, 43, 273–282. [Google Scholar] [CrossRef] [PubMed]
- d’Avella, A.; Portone, A.; Fernandez, L.; Lacquaniti, F. Control of fast-reaching movements by muscle synergy combinations. J. Neurosci. 2006, 26, 7791–7810. [Google Scholar] [CrossRef] [PubMed]
- Totaro, M.; Poliero, T.; Mondini, A.; Lucarotti, C.; Cairoli, G.; Ortiz, J.; Beccai, L. Soft Smart Garments for Lower Limb Joint Position Analysis. Sensors 2017, 17, 2314. [Google Scholar] [CrossRef] [PubMed]
- Huang, B.; Li, M.; Mei, T.; McCoul, D.; Qin, S.; Zhao, Z.; Zhao, J. Wearable Stretch Sensors for Motion Measurement of the Wrist Joint Based on Dielectric Elastomers. Sensors 2017, 17, 2708. [Google Scholar] [CrossRef] [PubMed]
- Papi, E.; Bo, Y.N.; McGregor, A.H. A flexible wearable sensor for knee flexion assessment during gait. Gait Posture 2018, 62, 480–483. [Google Scholar] [CrossRef] [PubMed]
- Atalay, A.; Sanchez, V.; Atalay, O.; Vogt, D.M.; Haufe, F.; Wood, R.J.; Walsh, C.J. Batch Fabrication of Customizable Silicone-Textile Composite Capacitive Strain Sensors for Human Motion Tracking. Adv. Mater. Technol. 2017, 2. [Google Scholar] [CrossRef]
- Lu, N.; Lu, C.; Yang, S.; Rogers, J. Highly sensitive skin-mountable strain gauges based entirely on elastomers. Adv. Funct. Mater. 2012, 22, 4044–4050. [Google Scholar] [CrossRef]
- Mengüç, Y.; Park, Y.L.; Pei, H.; Vogt, D.; Aubin, P.M.; Winchell, E.; Fluke, L.; Stirling, L.; Wood, R.J.; Walsh, C.J. Wearable soft sensing suit for human gait measurement. Int. J. Robot. Res. 2014, 33, 1748–1764. [Google Scholar] [CrossRef]
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Izadi-Najafabadi, A.; Futaba, D.N.; Hata, K. A stretchable carbon nanotube strain sensor for human-motion detection. Nat. Nanotechnol. 2011, 6, 296–301. [Google Scholar] [CrossRef] [PubMed]
- Aziz, O.; Robinovitch, S.N. An analysis of the accuracy of wearable sensors for classifying the causes of falls in humans. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 670–676. [Google Scholar] [CrossRef] [PubMed]
- Bonato, P. Wearable sensors and systems. IEEE Eng. Med. Biol. Mag. 2010, 29, 25–36. [Google Scholar] [CrossRef] [PubMed]
- Lebel, K.; Boissy, P.; Hamel, M.; Duval, C. Inertial measures of motion for clinical biomechanics: Comparative assessment of accuracy under controlled conditions–changes in accuracy over time. PLoS ONE 2015, 10, e0118361. [Google Scholar] [CrossRef] [PubMed]
- Jamwal, P.K.; Hussain, S.; Tsoi, Y.H.; Ghayesh, M.H.; Xie, S.Q. Musculoskeletal modelling of human ankle complex: Estimation of ankle joint moments. Clin. Biomech. 2017, 44, 75–82. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hertel, J. Functional anatomy, pathomechanics, and pathophysiology of lateral ankle instability. J. Athl. Train. 2002, 37, 364. [Google Scholar] [PubMed]
- Gribble, P.A.; Hertel, J. Effect of lower-extremity muscle fatigue on postural control. Arch. Phys. Med. Rehabil. 2004, 85, 589–592. [Google Scholar] [CrossRef] [PubMed]
- Marsland, F.; Lyons, K.; Anson, J.; Waddington, G.; Macintosh, C.; Chapman, D. Identification of cross-country skiing movement patterns using micro-sensors. Sensors 2012, 12, 5047–5066. [Google Scholar] [CrossRef] [PubMed]
- Gabbett, T.J. Quantifying the physical demands of collision sports: Does microsensor technology measure what it claims to measure? J. Strength Cond. Res. 2013, 27, 2319–2322. [Google Scholar] [CrossRef] [PubMed]
- Walker, E.J.; McAinch, A.J.; Sweeting, A.; Aughey, R.J. Inertial sensors to estimate the energy expenditure of team-sport athletes. J. Sci. Med. Sport 2016, 19, 177–181. [Google Scholar] [CrossRef] [PubMed]
- Zephyr Performance Systems. 2018. Available online: https://www.zephyranywhere.com/ (accessed on 15 January 2018).
- Johnson Sports Trainining. What Does Zephyr GPS Measure? 2016. Available online: http://zephyrathlete.weebly.com/what-does-zephyr-measure.html (accessed on 4 November 2016).
- Kim, J.H.; Roberge, R.; Powell, J.; Shafer, A.; Williams, W.J. Measurement accuracy of heart rate and respiratory rate during graded exercise and sustained exercise in the heat using the Zephyr BioHarness™. Int. J. Sports Med. 2013, 34, 497. [Google Scholar] [CrossRef] [PubMed]
- Hailstone, J.; Kilding, A.E. Reliability and validity of the Zephyr™ BioHarness™ to measure respiratory responses to exercise. Meas. Phys. Educ. Exerc. Sci. 2011, 15, 293–300. [Google Scholar] [CrossRef]
- Parrington, L.; Phillips, E.; Wong, A.; Finch, M.; Wain, E.; MacMahon, C. Validation of inertial measurement units for tracking 100m sprint data. In Proceedings of the 34th International Conference of Biomechanics in Sport, Tsukuba, Japan, 18–22 July 2016; Volume 34. [Google Scholar]
- Zebra. Zebra Sports Solutions. 2018. Available online: https://www.zebra.com/us/en/solutions/location-solutions/zebra-sport-solution.html (accessed on 15 January 2018).
- Zebra. Zebra Buys Navis, Proveo. 2007. Available online: http://www.rfidjournal.com/articles/view?3682 (accessed on 28 October 2016).
- Taylor, T. NFL Using Zebra RFID Chips to Track Player Movements, Gather Data. 2015. Available online: http://www.si.com/edge/2015/03/05/nfl-player-tracking-technology-new-orleans-saints (accessed on 4 November 2016).
- Cole, B. Zebra Technologies Partners with NFL to Track Player Movements. 2015. Available online: http://www.fangraphs.com/techgraphs/zebra-technologies-partners-with-nfl-to-track-player-movements/ (accessed on 28 October 2016).
- RFIDJournal. Zebra Acquires Active RFID Provider WhereNet. 2016. Available online: http://www.rfidjournal.com/articles/view?6652 (accessed on 28 October 2016).
- TheStreet. Zebra Technologies Makes Fast Company’s List Of Most Innovative Companies. 2016. Available online: https://www.thestreet.com/story/13459311/1/zebra-technologies-makes-fast-companys-list-of-most-innovative-companies.html (accessed on 27 October 2016).
- Zebra Technologies. Partners in Innovation. 2016. Available online: https://www.zebra.com/us/en/nfl.html (accessed on 4 November 2016).
- STATSports.com. STATSport. 2018. Available online: http://statsports.com/ (accessed on 15 January 2018).
- Zebra Technologies. REVEALED: The Hi-tech GPS Gizmo Liverpool Use to Ensure Gerrard, Suarez and Co are Fit Enough for New Season. 2013. Available online: http://www.dailymail.co.uk/sport/football/article-2377757/Liverpool-use-STATSports-Viper-united-ensure-players-fit-enough.html (accessed on 4 November 2016).
- Bennett, C.L.; Odom, C.; Ben-Asher, M. Knee angle estimation based on imu data and artificial neural networks. In Proceedings of the 2013 29th Southern Biomedical Engineering Conference (SBEC), Miami, FL, USA, 3–5 May 2013; pp. 111–112. [Google Scholar]
- Podoloff, R.M.; Benjamin, M.H.; Winters, J.; Golden, R.F. Flexible Tactile Sensor for Measuring Foot Pressure Distributions and for Gaskets. U.S. Patent 5,033,291, 23 July 1991. [Google Scholar]
- Akçetin, P.I.; Ergen, S.Ç.; Sezgin, T.M. HMM based inertial sensor system for coaching of rowing activity. In Proceedings of the 2012 20th Signal Processing and Communications Applications Conference (SIU), Mugla, Turkey, 18–20 April 2012. [Google Scholar]
- Müller, M.; Vilzmann, R.; Zierer, F. Pressure Measuring Base for Measurement of Mechanical Pressure Distribution on Human Foot Sole of e.g., Shoe for Medical Application for Patients with Diabetic Foot, Has Electronic Unit, and Pressure Sensors Arranged at Feed Lines. German Patent DE102010049154A1, 16 June 2016. [Google Scholar]
- Hurkmans, H.; Bussmann, J.; Benda, E.; Verhaar, J.; Stam, H. Accuracy and repeatability of the Pedar Mobile system in long-term vertical force measurements. Gait Posture 2006, 23, 118–125. [Google Scholar] [CrossRef] [PubMed]
- Charry, E.; Umer, M.; Taylor, S. Design and validation of an ambulatory inertial system for 3-D measurements of low back movements. In Proceedings of the 2011 Seventh International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), Adelaide, SA, Australia, 6–9 December 2011. [Google Scholar]
- McGinnis, R.S.; DiCristofaro, S.; Mahadevan, N.; Sen-Gupta, E.; Silva, I.; Jortberg, E.; Wright, J.A.; Ghaffari, R.; Aranyosi, A.J.; Patel, S. Longitudinal Data from Wearable Sensor System Suggests Movement Improves Standing Posture. In Proceedings of the 41st Annual Meeting of the American Society of Biomechanics, Boulder, CO, USA, 8–11 August 2017. [Google Scholar]
- Elbawab, M.; Olesik, J.; Aghazadeh, F.; Amankrah, F.; Horqque, D.; Zane, L. Motion Capture Garment. WO Patent App. PCT/CA2016/051,398, 1 June 2017. [Google Scholar]
- Schwameder, H.; Andress, M.; Graf, E.; Strutzenberger, G. Validation of an IMU-System (Gait-Up) to Identify Gait Parameters in Normal and Induced Limping Walking Conditions. In Proceedings of the ISBS-Conference Archive, Tsukuba, Japan, 18–22 July 2016; Volume 33. [Google Scholar]
- Waltz, E. A wearable turns baseball pitching into a science [News]. IEEE Spectrum 2015, 52, 16–17. [Google Scholar] [CrossRef]
- Notch. 2018. Available online: https://wearnotch.com/ (accessed on 15 January 2018).
- Liu, H.; Dai, R.; Gauthier, P. Multi-Node Motion Measurement and Analysis System. U.S. Patent App. 15/208,028, 20 April 2017. [Google Scholar]
- Zhang, J.T.; Novak, A.C.; Brouwer, B.; Li, Q. Concurrent validation of Xsens MVN measurement of lower limb joint angular kinematics. Physiol. Meas. 2013, 34, N63. [Google Scholar] [CrossRef] [PubMed]
- MacDonald, K.; Bahr, R.; Baltich, J.; Whittaker, J.L.; Meeuwisse, W.H. Validation of an inertial measurement unit for the measurement of jump count and height. Phys. Ther. Sport 2017, 25, 15–19. [Google Scholar] [CrossRef] [PubMed]
- Najafi, B.; Wrobel, J.; Boloori, A. Providing Motion Feedback Based on User Center of Mass. U.S. Patent 8,979,665, 17 March 2015. [Google Scholar]
- Chesnin, K.J.; Selby-Silverstein, L.; Besser, M.P. Comparison of an in-shoe pressure measurement device to a force plate: Concurrent validity of center of pressure measurements. Gait Posture 2000, 12, 128–133. [Google Scholar] [CrossRef]
- Esposito, M.; Macagno, M.; Vigano, D.G. Sensors, Interfaces and Sensor Systems for Data Collection and Integrated Remote Monitoring of Conditions at or Near Body Surfaces. U.S. Patent 8,925,392, 6 January 2015. [Google Scholar]
- Mestrovic, M.A.; Petersen, P.M.; Cranston, R.W.; Stannard, W.B.; D’arcy, P.B. System, Garment and Method, 2016. U.S. Patent 9,427,179, 30 August 2016. [Google Scholar]
- SensoriaFitness.com. Sensoria Fitness Socks and Anklet. 2016. Available online: http://store.sensoriafitness.com/sensoria-fitness-smart-socks (accessed on 28 October 2016).
- McGarry, C. Review: Sensoria’s Smart Socks Are a Futuristic Novelty that no Runner Really Needs. 2015. Available online: https://www.macworld.com/article/2936611/review-sensorias-smart-socks-are-a-futuristic-novelty-that-no-runner-really-needs.html (accessed on 28 October 2016).
- Wu, G.; Siegler, S.; Allard, P.; Kirtley, C.; Leardini, A.; Rosenbaum, D.; Whittle, M.; D D’Lima, D.; Cristofolini, L.; Witte, H.; et al. ISB recommendation on definitions of joint coordinate system of various joints for the reporting of human joint motion—Part I: Ankle, hip, and spine. J. Biomech. 2002, 35, 543–548. [Google Scholar] [CrossRef]
- Seel, T.; Raisch, J.; Schauer, T. IMU-based joint angle measurement for gait analysis. Sensors 2014, 14, 6891–6909. [Google Scholar] [CrossRef] [PubMed]
- Liquid Wire. Introducing Metal Gel. 2018. Available online: https://liquidwire.io/ (accessed on 28 January 2018).
- Fuller, E.A. Center of pressure and its theoretical relationship to foot pathology. J. Am. Podiatr. Med. Assoc. 1999, 89, 278–291. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kinematic Measures | Kinetic Measures | Hardware | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Symmetry | Step/Jump Count | Inferred Joint Angles | Absolute Joint Angles | Limb Segments | Intensity & Load | Ground Reaction Force | Shock/Impact Force | Pressure | Accelerometers | Magnetometers | Gyroscopes | GPS | Dielectric Elastomers | ||
| Catapult [27,28,29] | IMU | × | × | × | × | × | × | × | × | ||||||
| Zephyr [30,31,32,33] | IMU | × | × | × | × | × | |||||||||
| IMeasureU [34] | IMU | × | × | × | × | × | × | × | × | × | |||||
| Zebra [35,36,37,38,39,40,41] | RFID | T | × | R | |||||||||||
| STATSport [42,43] | IMU | × | × | × | × | × | × | × | |||||||
| ADPM [44] | IMU | × | × | × | × | × | × | × | × | × | |||||
| TekScan [45] | Insole | × | × | × | × | × | |||||||||
| Shimmer Sense [46] | DP | × | × | × | × | × | × | × | × | ||||||
| zFlo-Motion [47] | Insole | × | × | Z | × | × | × | × | |||||||
| Novel Pedar [48] | Insole & DP | × | × | × | × | × | |||||||||
| DorsaVi [49] | IMU | × | × | A | × | × | × | × | |||||||
| BioStamp [50] | IMU & Research | × | × | × | × | × | × | ||||||||
| Heddoko [51] | IMU Garment | × | × | × | × | × | × | × | |||||||
| GaitUP [52] | IMU | × | × | × | × | × | × | × | |||||||
| Motus [53] | IMU | × | × | × | × | × | × | ||||||||
| Notch [54] | IMU & DP | × | × | × | × | × | |||||||||
| Noitom [55] | IMU & DP | × | × | × | × | ||||||||||
| Xsens [56] | IMU | × | × | × | × | × | × | × | × | × | |||||
| G-Vert [57] | IMU | × | × | × | × | × | × | × | |||||||
| LegSys [58] | IMU | × | × | × | × | × | × | ||||||||
| paroTec [59] | Insole | × | × | × | × | × | H | ||||||||
| Sensoria [60,61,62,63] | CF | × | × | × | × | × | × | ||||||||
| Component/Purpose | Manufacturer | Model |
|---|---|---|
| Clamps—hold test article | Irwin | Quick-Grip 3 clamps |
| Drill Press—stretch test article | Irwin | 4 Drill Press Vise |
| Micro-Ohm meter—validate computing unit | Agilent/Keysight | 34420A |
| Digital multimeter—validate computing unit | Fluke | 179 |
| Liquid Wire sensors—test articles | Liquid Wire | Various |
| Hand-held temperature sensor—monitor test article temperature | Etekcity | 1080 |
| Ankle complex model—test sensor linearity | Custom | Ankle test fixture |
| Blow dryer—heat test article | Conair | 146RX |
| Digital Caliper—measure test article stretch | Tritan | 0344621 |
| DC Benchtop Power Supply—power circuit for testing | Extech | 382213 |
| Manufacturer | Model | Description |
|---|---|---|
| Arduino | Uno R3 | Microprocessor |
| RexQuails | RQ-RK-001 | Resistors |
| CTYRZCH | 4330118083 | 16 Bit I2C ADS1115 4-channel Analog–to–Digital Converter Module |
| Jameco ValuePro | 20812 | Solderless Breadboard |
| Elenco | JW–350 | Pre–formed Jumper Wire Kit |
| Elegoo | EL–CP–004 | Breadboard wire set for Arduino |
| Cable Matters | 200001–BLK–10x3 | USB 2.0 A–to–B Printer Cable, 10 feet |
| ID | Substrate | Length (mm) | Resting Resistance () |
|---|---|---|---|
| A | Thermoplastic Polyurethane | 202 | 30.0 |
| B | Thermoplastic Polyurethane | 209 | 44.1 |
| C | Silicone | 165 | 6.0 |
| D | Thermoplastic Polyurethane | 107 | 13.6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luczak, T.; Saucier, D.; Burch V., R.F.; Ball, J.E.; Chander, H.; Knight, A.; Wei, P.; Iftekhar, T. Closing the Wearable Gap: Mobile Systems for Kinematic Signal Monitoring of the Foot and Ankle. Electronics 2018, 7, 117. https://doi.org/10.3390/electronics7070117
Luczak T, Saucier D, Burch V. RF, Ball JE, Chander H, Knight A, Wei P, Iftekhar T. Closing the Wearable Gap: Mobile Systems for Kinematic Signal Monitoring of the Foot and Ankle. Electronics. 2018; 7(7):117. https://doi.org/10.3390/electronics7070117
Chicago/Turabian StyleLuczak, Tony, David Saucier, Reuben F. Burch V., John E. Ball, Harish Chander, Adam Knight, Pan Wei, and Tashfin Iftekhar. 2018. "Closing the Wearable Gap: Mobile Systems for Kinematic Signal Monitoring of the Foot and Ankle" Electronics 7, no. 7: 117. https://doi.org/10.3390/electronics7070117