
Complete Coverage Path Planning for a Multi-UAV Response System in Post-Earthquake Assessment

Abstract
:1. Introduction
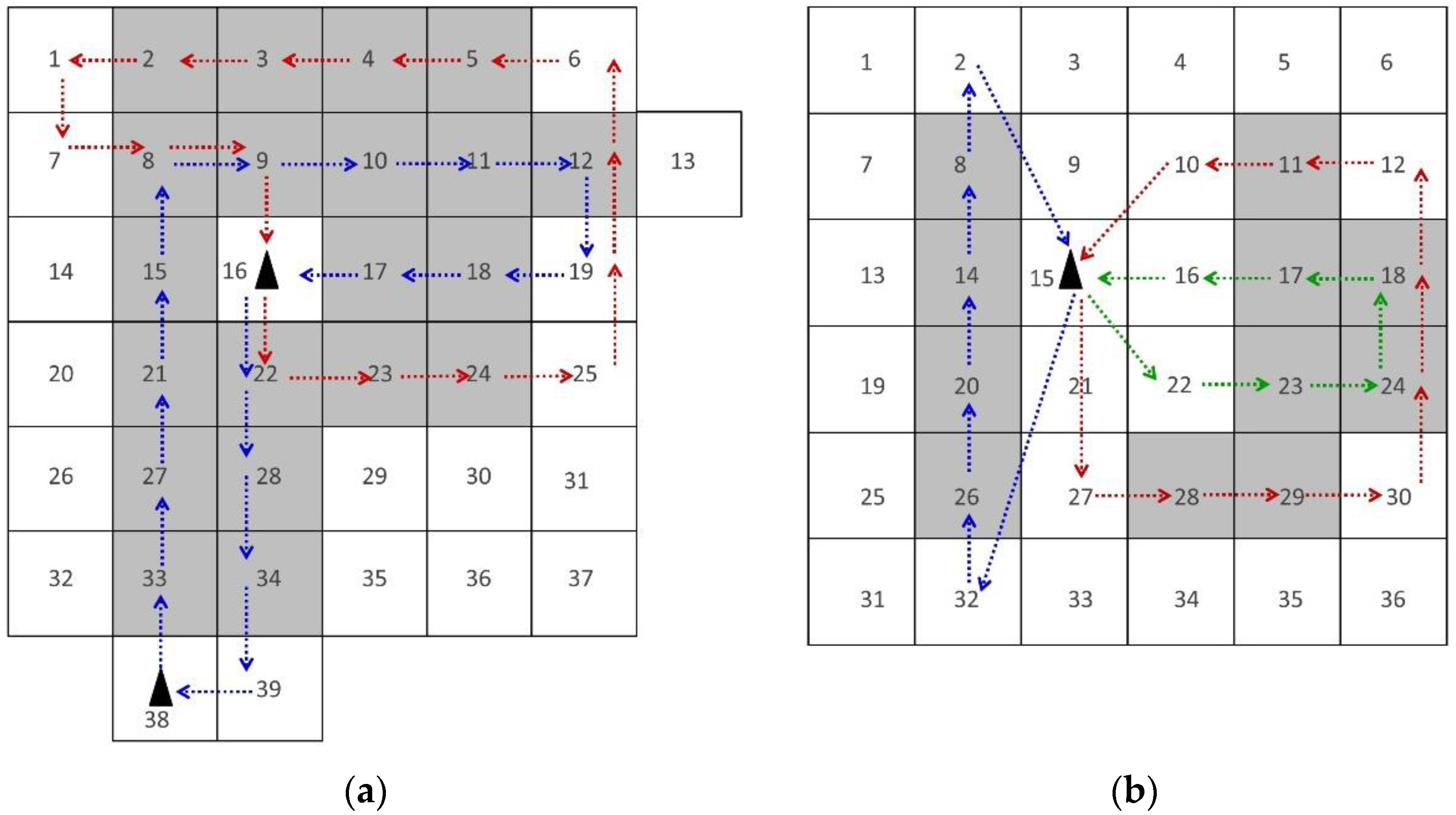
2. Problem Definition and Mathematical Formulations
2.1. 4-Index Formulation
2.2. 5-Index Formulation
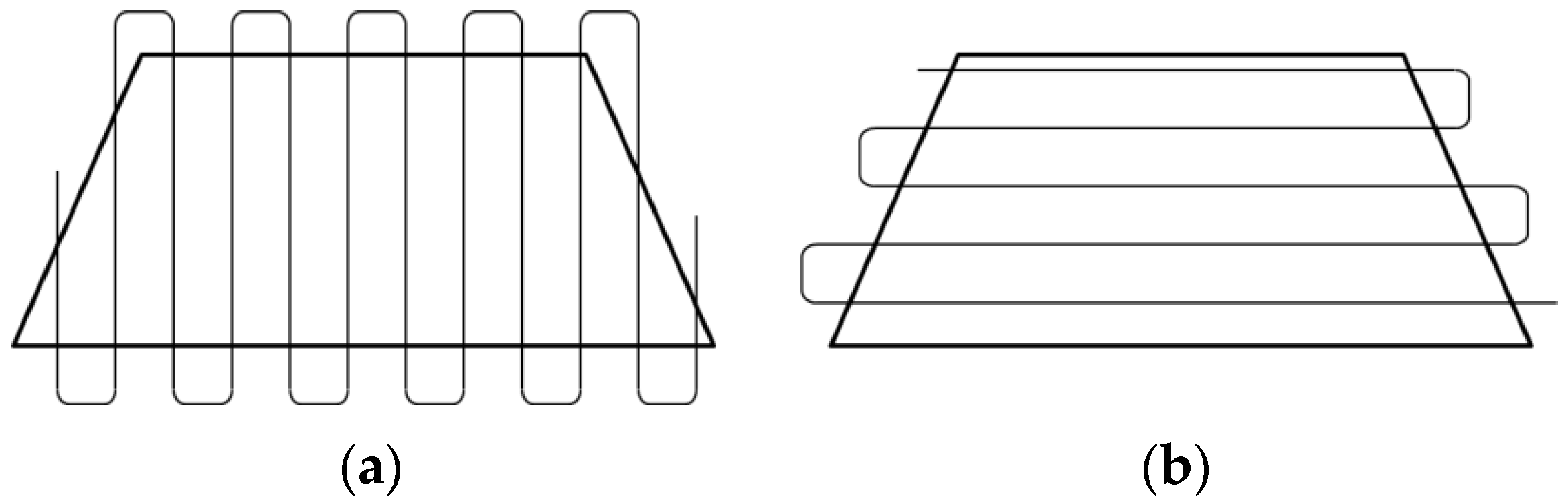
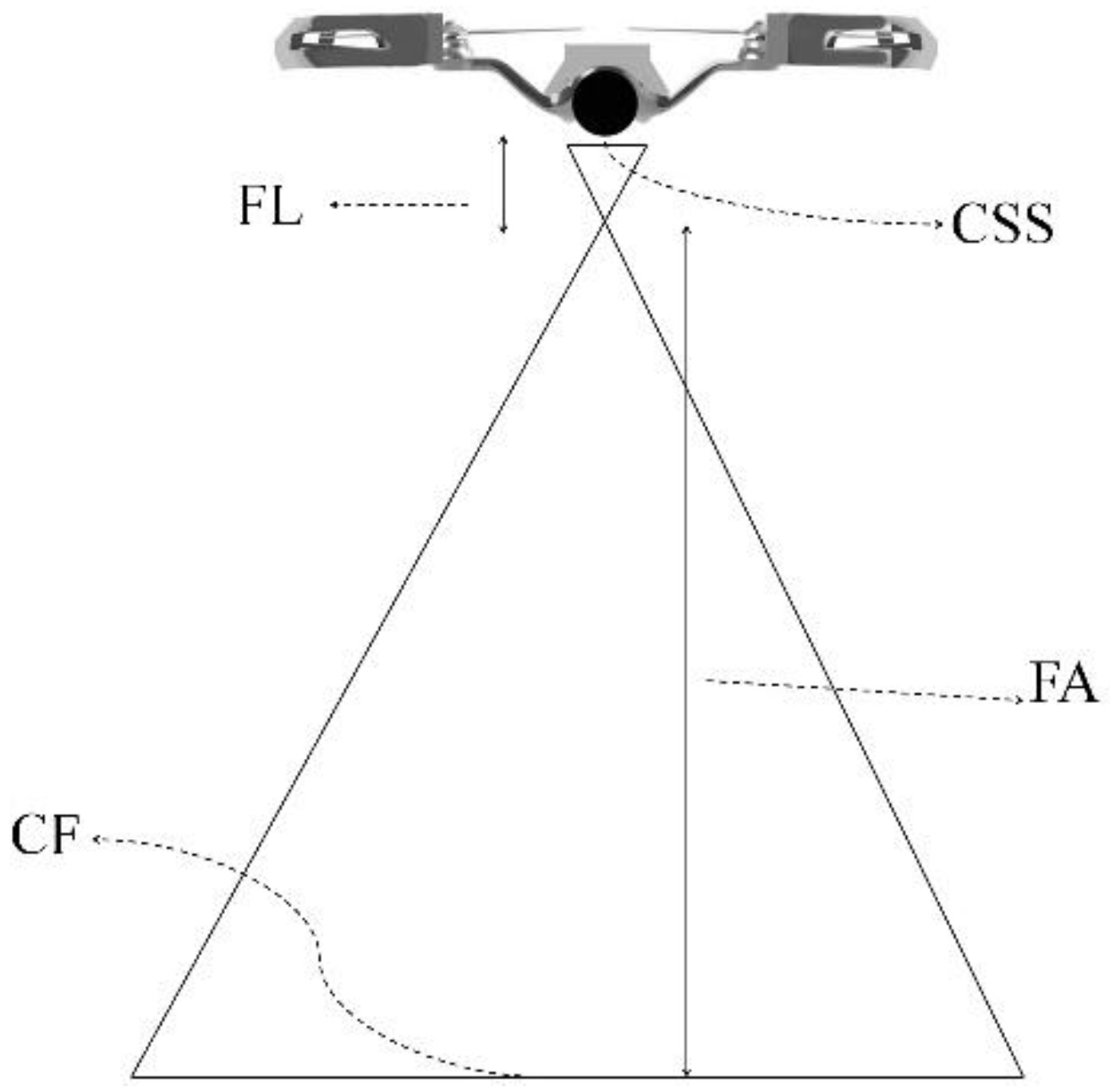
3. Methodology
3.1. Solver Generated Cuts and Heuristics
- LBHeur attempts to enhance new incumbents found throughout an MIP search. The LBHeur algorithm will be appealed only if a new incumbent is identified. In cases where several incumbents are identified at a single node, the last one will be considered.
- NHeur implements the techniques to find a feasible solution from the present node in branch and bound algorithm. The parameter HeurFreq restricts this offer. A positive number specifies the frequency of invoking NHeur (in the number of nodes).
3.2. Additional Constraints
3.3. Variable Branching Priority
- For the 4-index model, the variable branching priority order must be , , and .
- The branching priority of the 5-index model should be , , and .
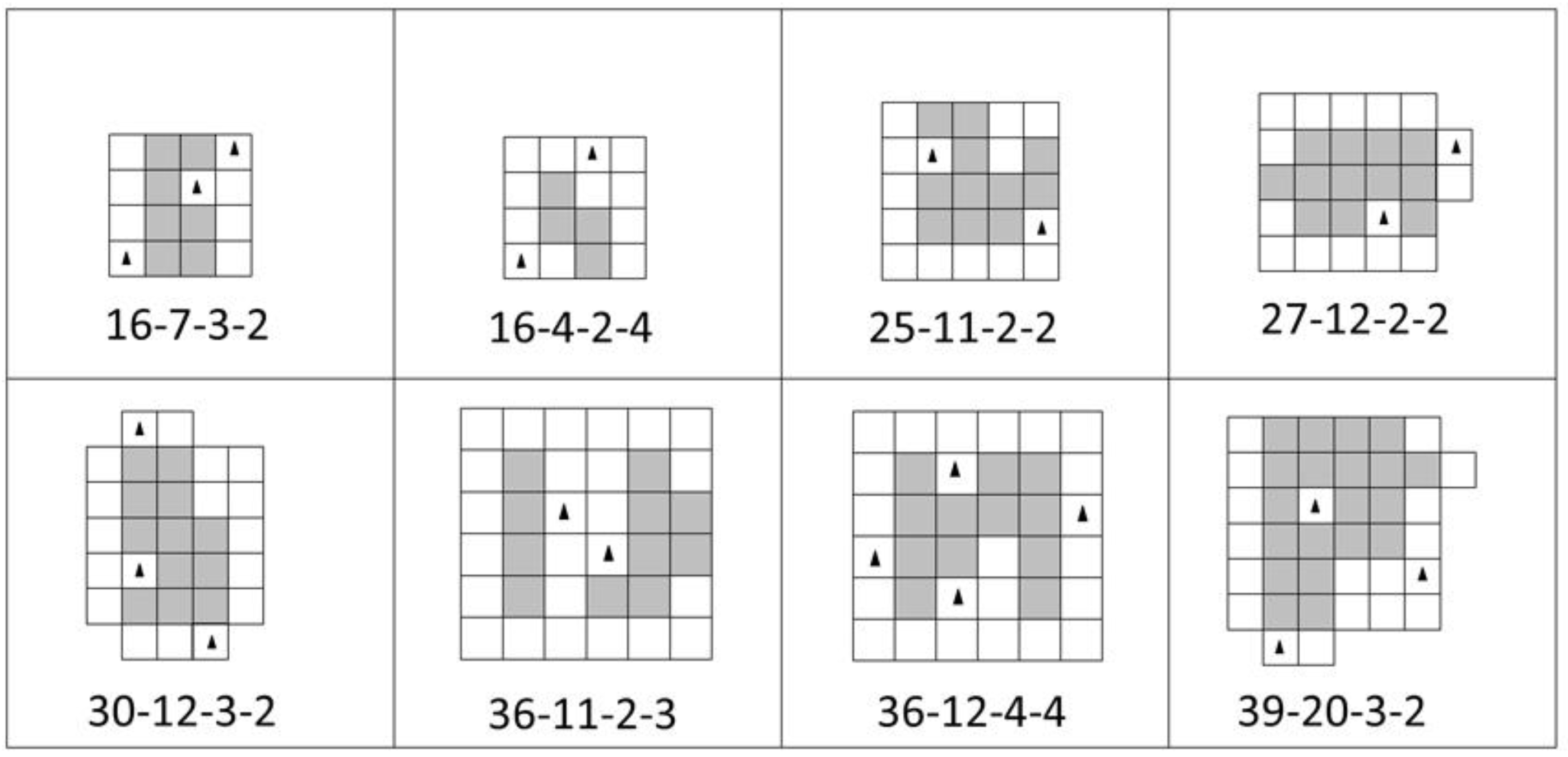
4. Computational Experiments and Results
5. Conclusions and Future Prospects
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pesaresi, M.; Gerhardinger, A.; Haag, F. Rapid damage assessment of built-up structures using VHR satellite data in tsunami-affected areas. Int. J. Remote Sens. 2007, 28, 3013–3036. [Google Scholar] [CrossRef]
- Chang, K.T.; Wang, E.H. Developing procedures for post-earthquake structural evaluation by laser scanning techniques. Insight-Non-Destr. Test. Cond. Monit. 2012, 54, 562–567. [Google Scholar] [CrossRef]
- Szantoi, Z.; Malone, S.; Escobedo, F.; Misas, O.; Smith, S.; Dewitt, B. A tool for rapid post-hurricane urban tree debris estimates using high resolution aerial imagery. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 548–556. [Google Scholar] [CrossRef]
- Olsen, M.J.; Chen, Z.; Hutchinson, T.; Kuester, F. Optical techniques for multiscale damage assessment. Geomat. Nat. Hazards Risk 2013, 4, 49–70. [Google Scholar] [CrossRef]
- Kashani, A.G.; Crawford, P.S.; Biswas, S.K.; Graettinger, A.J.; Grau, D. Automated Tornado Damage Assessment and Wind Speed Estimation Based on Terrestrial Laser Scanning. J. Comput. Civ. Eng. 2015, 29, 4014051. [Google Scholar] [CrossRef]
- Jiang, S.; Friedland, C.J. Automatic urban debris zone extraction from post-hurricane very high-resolution satellite and aerial imagery. Geomat. Nat. Hazards Risk 2016, 7, 933–952. [Google Scholar] [CrossRef]
- Janalipour, M.; Mohammadzadeh, A. Building Damage Detection Using Object-Based Image Analysis and ANFIS From High-Resolution Image (Case Study: BAM Earthquake, Iran). IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1937–1945. [Google Scholar] [CrossRef]
- Fernandez Galarreta, J.; Kerle, N.; Gerke, M. UAV-based urban structural damage assessment using object-based image analysis and semantic reasoning. Nat. Hazards Earth Syst. Sci. 2015, 15, 1087–1101. [Google Scholar] [CrossRef]
- Al-Wassai, F.A.; Kalyankar, N.V. Major Limitations of Satellite images. Available online: https://arxiv.org/ftp/arxiv/papers/1307/1307.2434.pdf (accessed on 29 November 2016).
- Grandoni, D. Advantages and Limitations of Using Satellite Images for Flood Mapping. Available online: http://www.copernicus.eu/sites/default/files/documents/User_uptake/Emergency_Events/Athens/03_Session_01_AdvantageAndLimitationsOfUsingSatelliteImagery.pdf (accessed on 29 November 2016).
- Qi, J.; Song, D.; Shang, H.; Wang, N.; Hua, C.; Wu, C.; Qi, X.; Han, J. Search and Rescue Rotary-Wing UAV and Its Application to the Lushan Ms 7.0 Earthquake. J. Field Robot. 2016, 33, 290–321. [Google Scholar] [CrossRef]
- Zelinsky, A.; Jarvis, R.A.; Byrne, J.C.; Yuta, S. Planning Paths of Complete Coverage of an Unstructured Environment by a Mobile Robot. In Proceedings of the International Conference on Advanced Robotics, Tokyo, Japan, 1–2 November 1993; pp. 533–538.
- Nedjati, A.; Vizvari, B.; Izbirak, G. Post-earthquake response by small UAV helicopters. Nat. Hazards 2015, 80, 1669–1688. [Google Scholar] [CrossRef]
- Kendoul, F. Survey of Advances in Guidance, Navigation, and Control of Unmanned Rotorcraft Systems. J. Field Robot. 2012, 29, 315–378. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Montoya-Torres, J.R.; López Franco, J.; Nieto Isaza, S.; Felizzola Jiménez, H.; Herazo-Padilla, N. A literature review on the vehicle routing problem with multiple depots. Comput. Ind. Eng. 2015, 79, 115–129. [Google Scholar] [CrossRef]
- Oberlin, P.; Rathinam, S.; Darbha, S. Today’s Traveling Salesman Problem. IEEE Robot. Autom. Mag. 2010, 17, 70–77. [Google Scholar] [CrossRef]
- Ho, H.-M.; Ouaknine, J. The Cyclic-Routing UAV Problem is PSPACE-Complete. In Foundations of Software Science and Computation Structures; Springer: Berlin/Heidelberg, Germany, 2015; pp. 328–342. [Google Scholar]
- Gendreau, M.; Laporte, G.; Semet, F. The Covering Tour Problem. Oper. Res. 1997, 45, 568–576. [Google Scholar] [CrossRef]
- Choset, H. Coverage for robotics—A survey of recent results. Ann. Math. Artif. Intell. 2001, 31, 113–126. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- De Carvalho, R.N.; Vidal, H.A.; Vieira, P.; Ribeiro, M.I. Complete coverage path planning and guidance for cleaning robots. In Proceedings of the 1997 IEEE International Symposium on Industrial Electronics, Guimaraes, Portugal, 7–11 July 1997; pp. 677–682.
- Li, Y.; Chen, H.; Joo Er, M.; Wang, X. Coverage path planning for UAVs based on enhanced exact cellular decomposition method. Mechatronics 2011, 21, 876–885. [Google Scholar] [CrossRef]
- Barrientos, A.; Colorado, J.; Cerro del, J.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]
- Wang, X.; Sun, T.; Li, D. Energy-optimal coverage path planning on topographic map for environment survey with unmanned aerial vehicles. Electron. Lett. 2016, 52, 699–701. [Google Scholar]
- Easton, K.; Burdick, J. A Coverage Algorithm for Multi-robot Boundary Inspection. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation; Barcelona, Spain, 18–22 April 2005; pp. 727–734.
- Huang, W.H.; York, N. Optimal Line-sweep-based Decompositions for Coverage Algorithms. In Proceedings of the 2001 IEEE International Conference on Robotics & Automation, Seoul, Korea, 21–26 May 2001; pp. 27–32.
- Maza, I.; Ollero, A. Multiple UAV cooperative searching operation using polygon area decomposition and efficient coverage algorithms. In Distributed Autonomous Robotic Systems 6; Springer: Tokyo, Japan, 2007; pp. 221–230. [Google Scholar]
- Avellar, G.; Pereira, G.; Pimenta, L.; Iscold, P. Multi-UAV Routing for Area Coverage and Remote Sensing with Minimum Time. Sensors 2015, 15, 27783–27803. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Li, D. Coverage path planning for UAVs in unknown directional regions. Int. J. Wirel. Mob. Comput. 2015, 8, 285–293. [Google Scholar] [CrossRef]
- Lemmens, M. Geo-information Technology—What It Is, How It Was and Where It Is Heading to. In Geo-Information; Springer: Dordrecht, The Netherlands, 2011; pp. 1–22. [Google Scholar]
- Greenwood, F. How To Make Maps With Drones. In Drones and Aerial Observation: New Technologies for Property Rights, Human Rights, and Global Development a Primer; New America: Washington, DC, USA, 2015; pp. 35–48. [Google Scholar]
- Falkner, E.; Morgan, D. Aerial Mapping: Methods and Applications; Lewis Publishers: Boca Raton, FL, USA, 2002. [Google Scholar]
- Gomory, R.E. An Algorithm for the Mixed Integer Problem; RAND Corporation: Santa Monica, CA, USA, 1960. [Google Scholar]
- Balas, E.; Ceria, S.; Cornuéjols, G.; Natraj, N. Gomory cuts revisited. Oper. Res. Lett. 1996, 19, 1–9. [Google Scholar] [CrossRef]
- Klotz, E.; Newman, A.M. Practical guidelines for solving difficult mixed integer linear programs. Surv. Oper. Res. Manag. Sci. 2013, 18, 18–32. [Google Scholar] [CrossRef]
- Fischetti, M.; Lodi, A. Local branching. Math. Program. 2003, 98, 23–47. [Google Scholar] [CrossRef]
- Karaoglan, I.; Altiparmak, F. A memetic algorithm for the capacitated location-routing problem with mixed backhauls. Comput. Oper. Res. 2015, 55, 200–216. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sets: | |
| The set of residential squares that must be covered | |
| The set of potential AUV base (depot) squares | |
| The set of nonresidential squares | |
| The set of available UAVs | |
| The set of routes | |
| The set of moving directions from one square to the other | |
| Parameters: | |
| The travel time from square to | |
| The distance between square and | |
| Total number of UAV bases (depots) that asked to be open | |
| The possible flight time of each UAV | |
| Variables: | |
| Binary decision variable equals to 1, if UAV exists from side of square to square in route , and 0 otherwise | |
| Binary decision variable equals to 1, if UAV travels from square to square in route , and 0 otherwise | |
| Positive integer variable determines how many nodes are left to cover in route by UAV after visiting and just before visiting | |
| Binary variable equals to 1, if potential depot is open and 0 otherwise | |
| Binary variable equals to 1, if a UAV travels from r side of square to square in route | |
| Binary variable equals to 1, if UAV belongs to depot and 0 otherwise | |
| Binary variable equals to 1, if a UAV enters from side of and exits from the opposite side in route | |
| Binary variable equals to 1, if a UAV enters from side of and exits from the opposite side in route | |
| T | The maximum mission time of UAVs |
| 4-Index Model | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Original Model | 3.1, 3.2 | 3.1, 3.3 | 3.2, 3.3 | 3.1, 3.2, 3.3 | |||||||||||
| Instance | CPU | Results | Gap (%) | CPU | Results | Gap (%) | CPU | Results | Gap (%) | CPU | Results | Gap (%) | CPU | Results | Gap (%) |
| 16-7-3-2 | 254 | 21.3 | 0 | 136 | 21.3 | 0 | 281 | 21.3 | 0 | 216 | 21.3 | 0 | 284 | 21.3 | 0 |
| 16-4-2-4 | 18,000 | 13.15 | 15.2 | 3850 | 13.15 | 0 | 4300 | 13.15 | 0 | 5400 | 13.15 | 0 | 3650 | 13.15 | 0 |
| 25-11-2-2 | 1400 | 24 | 0 | 310 | 24 | 0 | 343 | 24 | 0 | 162 | 24 | 0 | 84 | 24 | 0 |
| 27-12-2-2 | 18,000 | 35.98 | 35.1 | 1325 | 28 | 0 | 2104 | 28 | 0 | 1206 | 28 | 0 | 1618 | 28 | 0 |
| 30-12-3-2 | 12,587 | 26.32 | 0 | 2877 | 26.32 | 0 | 2754 | 26.32 | 0 | 3107 | 26.32 | 0 | 2639 | 26.32 | 0 |
| 36-11-2-3 | 18,000 | NA | - | 18,000 | NA | - | 18,000 | NA | - | 18,000 | NA | - | 18,000 | NA | - |
| 36-12-4-4 | 18,000 | NA | - | 18,000 | NA | - | 18,000 | NA | - | 18,000 | NA | - | 18,000 | 24.4 | 59.4 |
| 39-20-3-2 | 18,000 | NA | - | 18,000 | NA | - | 18,000 | NA | - | 18,000 | NA | - | 15,669 | 36 | 0 |
| 5-Index Model | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Original Model | 3.1, 3.2 | 3.1, 3.3 | 3.2, 3.3 | 3.1, 3.2, 3.3 | |||||||||||
| Instance | CPU | Results | Gap (%) | CPU | Results | Gap (%) | CPU | Results | Gap (%) | CPU | Results | Gap (%) | CPU | Results | Gap (%) |
| 25-5-3-3 | 888 | 21.3 | 0 | 467 | 21.3 | 0 | 782 | 21.3 | 0 | 159 | 21.3 | 0 | 129 | 21.3 | 0 |
| 16-4-2-4 | 11,320 | 13.15 | 0 | 1359 | 13.15 | 0 | 5527 | 13.15 | 0 | 650 | 13.15 | 0 | 479 | 13.15 | 0 |
| 25-11-2-2 | 850 | 24 | 0 | 286 | 24 | 0 | 186 | 24 | 0 | 226 | 24 | 0 | 48 | 24 | 0 |
| 27-12-2-2 | 18,000 | 30.82 | 30.9 | 966 | 28 | 0 | 18,000 | 30.24 | 30.1 | 570 | 28 | 0 | 559 | 28 | 0 |
| 30-12-3-2 | 6875 | 26.32 | 0 | 2472 | 26.32 | 0 | 3830 | 26.32 | 0 | 2958 | 26.32 | 0 | 1421 | 26.32 | 0 |
| 36-11-2-3 | 18,000 | NA | - | 18,000 | NA | - | 18,000 | NA | - | 18,000 | 21.3 | 13.7 | 18,000 | 20.79 | 6.3 |
| 36-12-4-4 | 18,000 | NA | - | 18,000 | NA | - | 18,000 | NA | - | 18,000 | NA | - | 18,000 | 22.82 | 49.2 |
| 39-20-3-2 | 18,000 | NA | - | 18,000 | 42.82 | 27.1 | 18,000 | NA | - | 18,000 | 36 | 11.7 | 10,554 | 36 | 0 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nedjati, A.; Izbirak, G.; Vizvari, B.; Arkat, J. Complete Coverage Path Planning for a Multi-UAV Response System in Post-Earthquake Assessment. Robotics 2016, 5, 26. https://doi.org/10.3390/robotics5040026
Nedjati A, Izbirak G, Vizvari B, Arkat J. Complete Coverage Path Planning for a Multi-UAV Response System in Post-Earthquake Assessment. Robotics. 2016; 5(4):26. https://doi.org/10.3390/robotics5040026
Chicago/Turabian StyleNedjati, Arman, Gokhan Izbirak, Bela Vizvari, and Jamal Arkat. 2016. "Complete Coverage Path Planning for a Multi-UAV Response System in Post-Earthquake Assessment" Robotics 5, no. 4: 26. https://doi.org/10.3390/robotics5040026