Using Crowdsourced Geodata for Agent-Based Indoor Evacuation Simulations


Abstract
:1. Introduction
2. Related Work
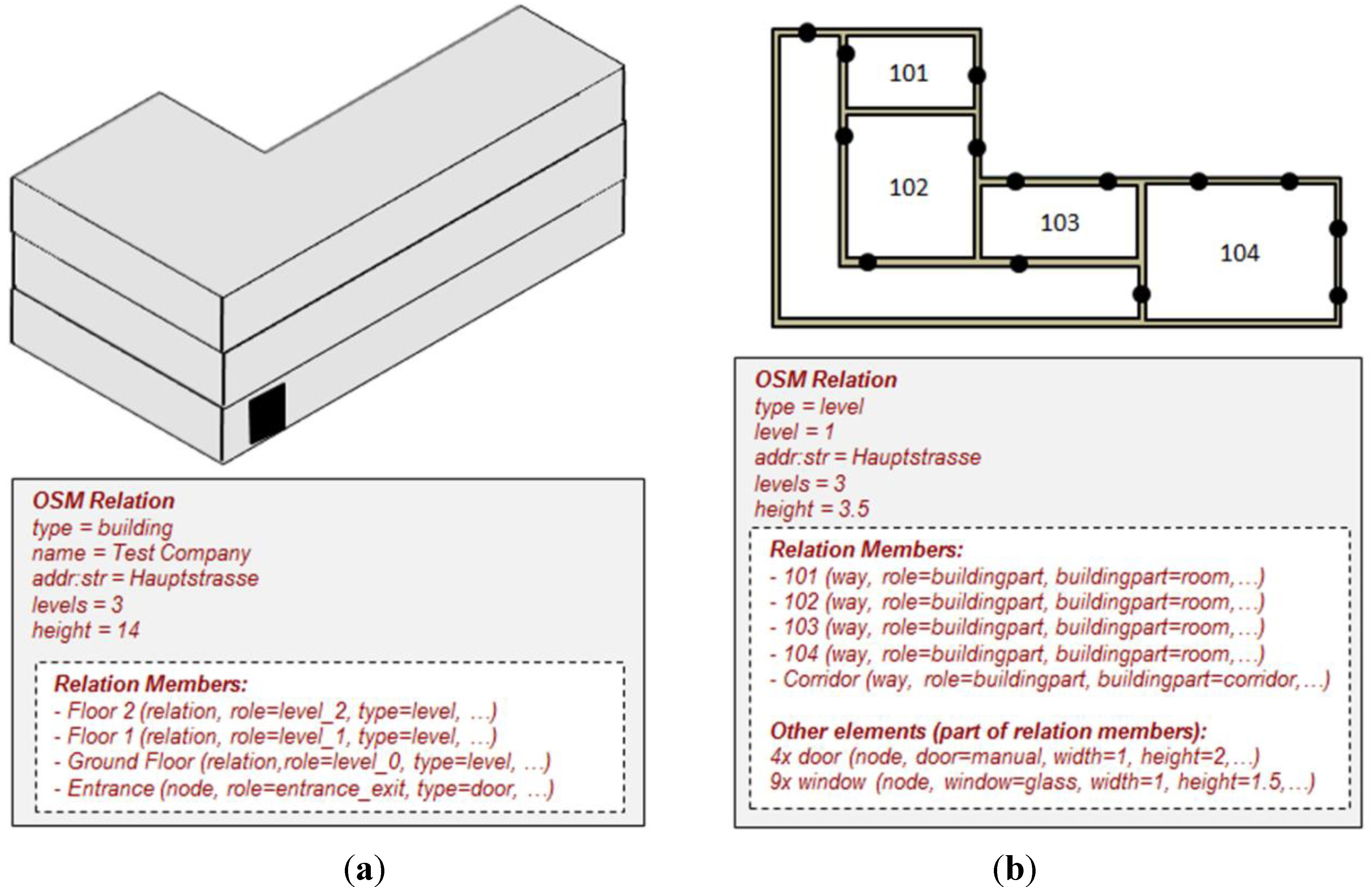
2.1. Crowdsourced (Indoor) Geodata from OpenStreetMap
2.2. Agent-Based Indoor Evacuation Simulation
2.3. Multi-Agent Transport Simulation (MATSim)
3. Evacuation Simulations with IndoorOSM
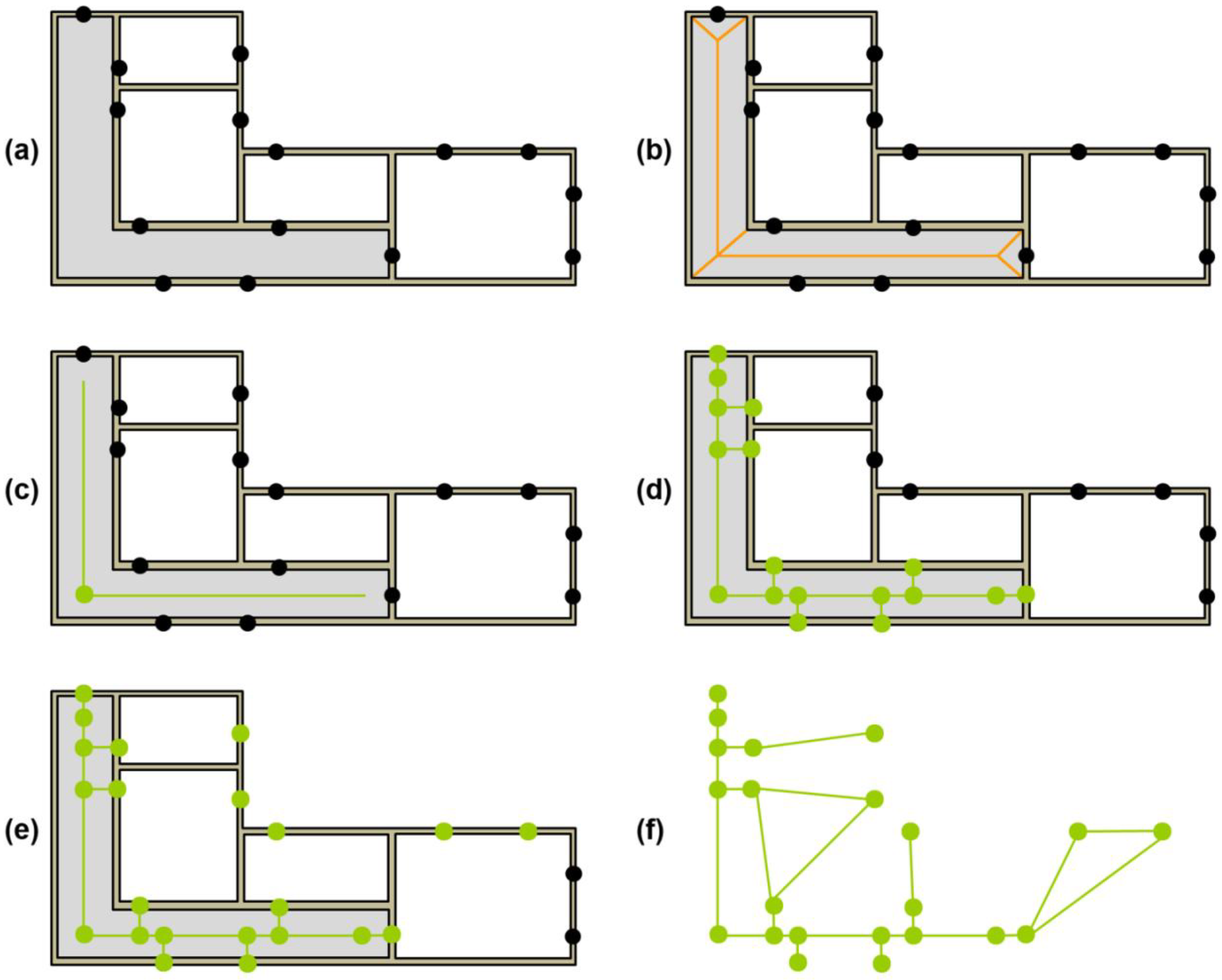
3.1. Generating the Network


3.2. Generating the Synthetic Population
3.3. Defining the Evacuation Area
4. Demonstration and Experimental Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Building Floor | Population |
|---|---|
| Basement (Floor −1) | 24 |
| Ground (Floor 0) | 178 |
| Floor 1 | 74 |
| Floor 2 | 37 |
| Total | 313 |
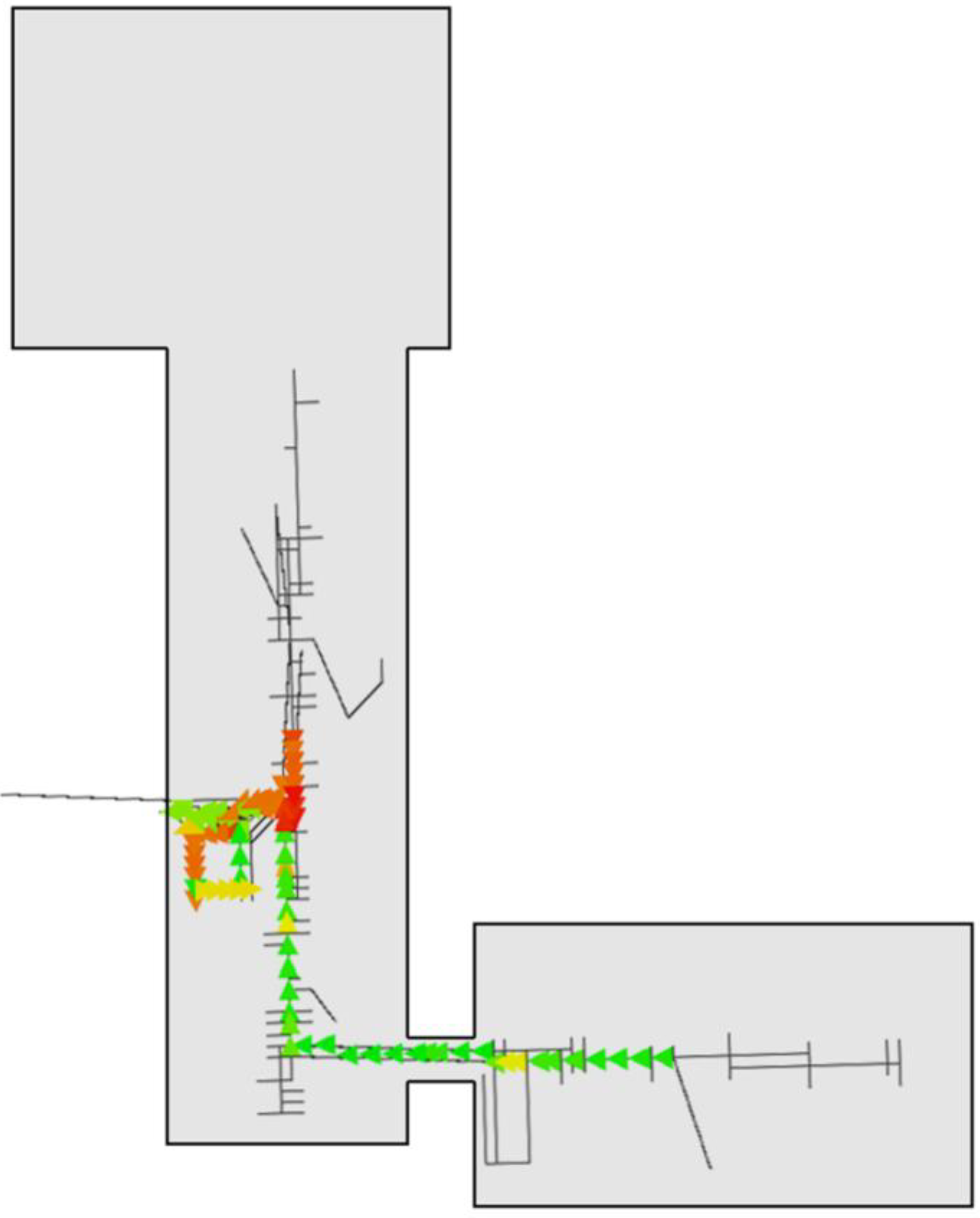
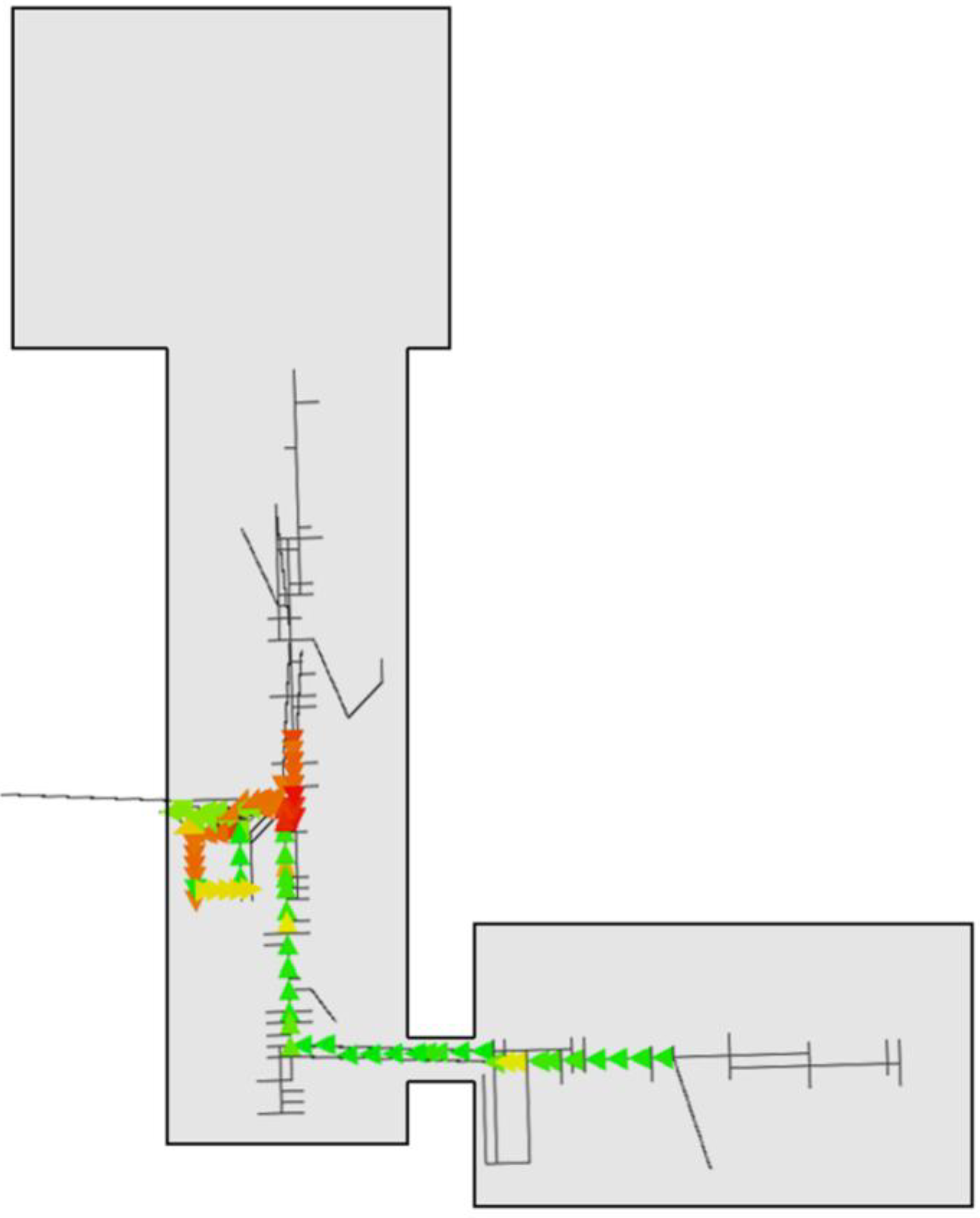
4.1. Scenario 1: Planned Site Clearing
| Figure | Iteration 1 | Iteration 50 | Iteration 100 | Average |
|---|---|---|---|---|
| Evacuation time for first agent | 7.1 s | 7.1 s | 7.1 s | 7.1 s |
| Evacuation time for last agent (i.e., complete building) | 166.2 s | 166.0 s | 165.8 | 166.0 s |
| Average trip duration for one agent | 80.53 s | 80.82 s | 80.86 | 80.85 s |
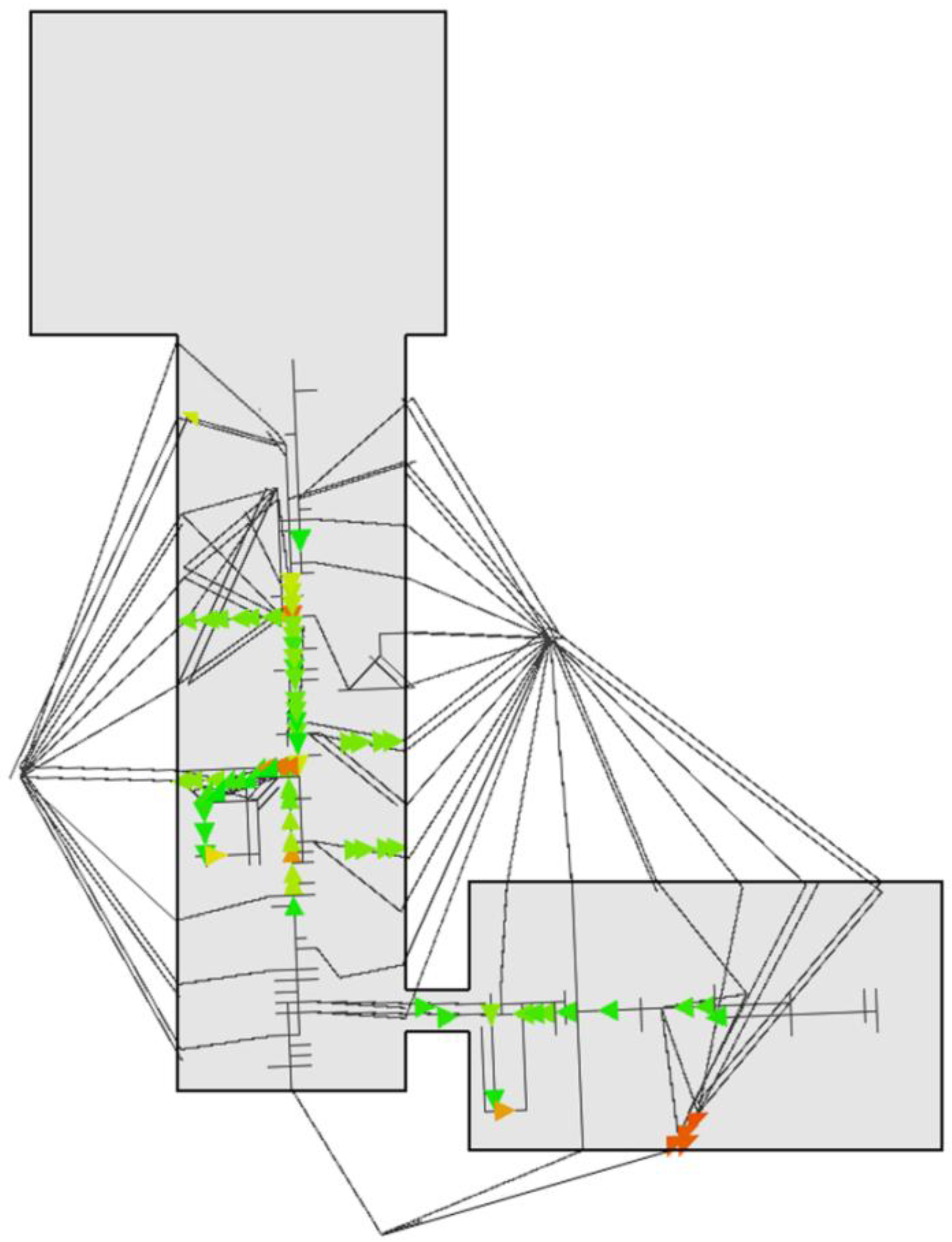
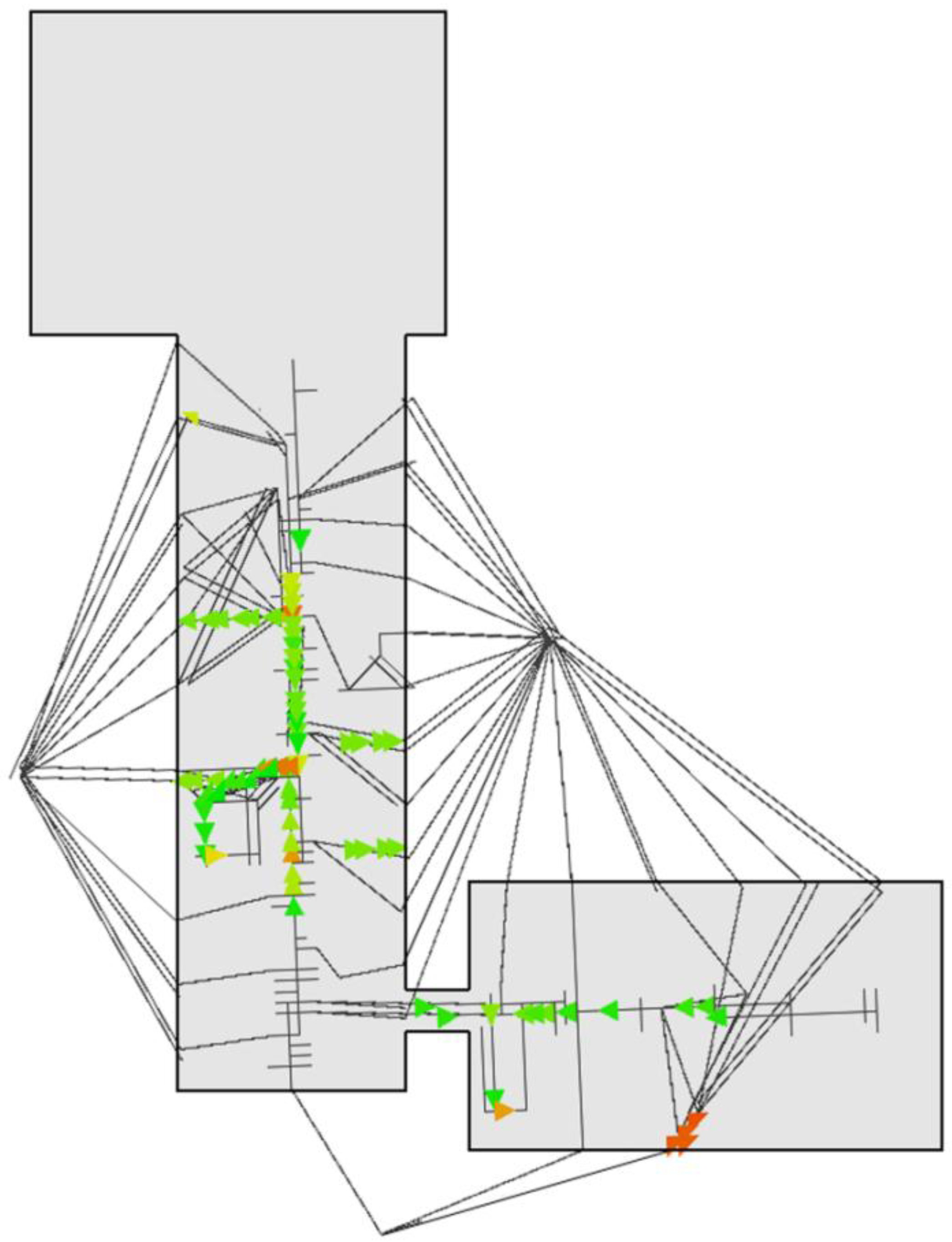
4.2. Scenario 2: Unpredicted Evacuation
| Figure | Iteration 1 | Iteration 50 | Iteration 100 | Average |
|---|---|---|---|---|
| Evacuation time for first agent | 2.1 s | 2.1 s | 2.1 s | 2.1 s |
| Evacuation time for last agent (i.e., complete building) | 106.1 s | 106.0 s | 105.8 s | 105.9 s |
| Average trip duration | 30.04 s | 30.03 s | 29.99 s | 30.03 s |
5. Discussion
5.1. Limitations of the IndoorOSM Data
5.2. Limitations of the MATSim Simulation Framework
6. Conclusion and Future Work
Acknowledgments
References
- Schmitz, S.; Zipf, A.; Neis, P. Proposal to Define Common Resources for OpenGIS Location Services. In Proceedings of 5th International Symposium on LBS & TeleCartography, Salzburg, Austria, 26–28 November 2008.
- Neis, P.; Zipf, A. OpenRouteService.org Is Three Times “Open”: Combining OpenSource, OpenLS and OpenStreetMaps. In Proceedings of the GISRUK 2008 Conference, Manchester, UK, 2–4 April 2008.
- Neis, P.; Singler, P.; Zipf, A. Collaborative Mapping and Emergency Routing for Disaster Logistics—Case Studies from the Haiti Earthquake and the UN Portal for Afrika. In Proceedings of Geospatial Crossroads @ GI_Forum ’10, Salzburg, Austria, 6–9 July 2010.
- Dallmeyer, J.; Lattner, A.D.; Timm, I.J. From GIS to Mixed Traffic Simulation in Urban Scenarios. In Proceedings of 4th International ICST Conference on Simulation Tools and Techniques, Barcelona, Spain, 21–25 March 2011; pp. 134–143.
- Zilske, M.; Neumann, A.; Nagel, K. OpenStreetMap For Traffic Simulation. In Proceedings of State of the Map Europe 2011 (SOTM-EU), Vienna, Austria, 15–17 July 2011; pp. 126–134.
- Zielstra, D.; Zipf, A. A Comparative Study of Proprietary Geodata and Volunteered Geographic Information for Germany. In Proceedings of 13th AGILE International Conference on Geographic Information Science, Guimarães, Portugal, 10–14 May 2010; pp. 1–15.
- Haklay, M. How good is volunteered geographical information? A comparative study of OpenStreetMap and Ordnance Survey datasets. Environ. Plan. B 2010, 37, 682–703. [Google Scholar]
- Neis, P.; Zielstra, D.; Zipf, A. The street network evolution of crowdsourced maps: OpenStreetMap in Germany 2007-2011. Future Internet 2012, 4, 1–21. [Google Scholar]
- Winter, S. Indoor spatial information. Int. J. 3-D Inf. Model. 2012, 1, 25–42. [Google Scholar]
- Jensen, C.; Li, K.-J.; Winter, S. The other 87%: A report on The Second International Workshop on Indoor Spatial Awareness (San Jose, California-November 2, 2010). ACM Sigspatial Newsletter 2011, 3, 10–12. [Google Scholar]
- Goetz, M.; Zipf, A. Extending OpenStreetMap to Indoor Environments: Bringing Volunteered Geographic Information to the Next Level. In Proceedings of Urban and Regional Data Management: UDMS Annual 2011, Delft, Netherlands, 28–30 September 2011; pp. 47–58.
- OSM IndoorOSM. Available online: http://wiki.openstreetmap.org/wiki/IndoorOSM (accessed on 10 May 2012).
- Goetz, M. Towards generating highly detailed 3D CityGML models from OpenStreetMap. Int. J. Geog. Inf. Sci. 2012, accepted. [Google Scholar]
- Zipf, A.; Basanow, J.; Neis, P.; Neubauer, S.; Schilling, A. Towards 3D Spatial Data Infrastructures (3D-SDI) based on Open Standards—Experiences, Results and Future Issues. In Advances in 3D Geoinformation Systems, Lecture Notes in Geoinformation and Cartography; van Oosterom, P., Zlatanova, S., Penninga, F., Fendel, E.M., Eds.; Springer: Heidelberg, Germany, 2007; pp. 65–86. [Google Scholar]
- Kolbe, T.H. Representing and Exchanging 3D City Models with CityGML. In 3D GEO-Information Sciences LNG&C Part I; Lee, J., Zlatanova, S., Eds.; Springer: Heidelberg, Germany, 2009; pp. 15–31. [Google Scholar]
- Kolbe, T.H.; Gröger, G.; Plümer, L. CityGML: 3D City Models and their Potential for Emergency Response. In Geospatial Information Technology for Emergency Response; Zlatanova, S., Li, J., Eds.; Taylor & Francis: London, UK, 2008; pp. 257–274. [Google Scholar]
- Goetz, M.; Zipf, A. Indoor Route Planning with Volunteered Geographic Information on a (Mobile) Web-based Platform. In Proceedings of 9th Symposium on Location Based Services, Munich, Germany, 16–18 October 2012; (accepted), p. 16.
- Goetz, M. IndoorOSM: Mapping the Indoor World. Available online: http://indoorosm.uni-hd.de/ (accessed on 10 May 2012).
- Goetz, M. Using Crowdsourced Indoor Geodata for the Creation of a Three-dimensional Indoor Routing Web Application. Future Internet 2012, 4, 575–591. [Google Scholar] [CrossRef]
- Shi, J.; Ren, A.; Chen, C. Agent-based evacuation model of large public buildings under fire conditions. Automat. Constr. 2008, 18, 338–347. [Google Scholar]
- Okaya, M.; Yotsukura, S.; Sato, K.; Takahashi, T. Agent Evacuation Simulation Using a Hybrid Network and Free Space Models. In Proceedings of 12th International Conference on Principles of Practice in Multi-Agent Systems, Nagoya, Japan, 14–16 December 2009; pp. 563–570.
- Goodchild, M.F. Citizens as voluntary sensors: Spatial data infrastructure in the world of Web 2.0. Int. J. Spat. Data Infrastruct. Res. 2007, 2, 24–32. [Google Scholar]
- OSM Map Features. Available online: http://wiki.openstreetmap.org/wiki/Map_Features (accessed on 23 July 2012).
- Tagwatch Tagwatch Planet-Latest. Available online: http://tagwatch.stoecker.eu/Planet-latest/En/tags.html (accessed on 10 May 2012).
- OSM OpenStreetMap Wiki. Available online: http://wiki.openstreetmap.org/ (accessed on 10 May 2012).
- OSM Indoor Mapping: OpenStreetMap Wiki. Available online: http://wiki.openstreetmap.org/wiki/Indoor (accessed on 10 May 2012).
- Peacock, R.D.; Kuligowski, E.D. Workshop on building occupant movement during fire emergencies. NIST Special Publication 2005, 1032, 105. [Google Scholar]
- Hajibabai, L.; Delavar, M.R.; Malek, M.R.; Frank, A.U. Agent-Based Simulation of Spatial Cognition and Wayfinding in Building Fire Emergency Evacuation. In Geomatics Solutions for Disaster Management Lecture Notes in Geoinformation and Cartography; Li, J., Zlatanova, S., Fabbri, A.G., Eds.; Springer: Berlin, Germany, 2007; pp. 255–270. [Google Scholar]
- Yamashita, T.; Soeda, S.; Noda, I. Evacuation Planning Assist System with Network Model-Based Pedestrian Simulator. In Proceedings of 12th International Conference on Principles of Practice in Multi-Agent Systems, Nagoya, Japan, 14–16 December 2009; pp. 649–656.
- Wu, L.; Lin, H. A personalized spatial cognitive road network for agent-based modeling of pedestrian evacuation simulation: A case study in Hong Kong. Ann. GIS 2012, 18, 109–119. [Google Scholar] [CrossRef]
- Gwynne, S.; Galea, E.R.; Owen, M.; Lawrence, P.J.; Filippidis, L. A review of the methodologies used in the computer simulation of evacuation from the built environment. Build. Environ. 1998, 34, 741–749. [Google Scholar]
- Schreckenberg, M. Pedestrian and Evacuation Dynamics; Springer: Berlin, Germany, 2001; p. 452. [Google Scholar]
- Schreckenberg, M.; Sharma, S.D. Pedestrian and Evacuation Dynamics; Springer: Berlin, Germany, 2002; p. 452. [Google Scholar]
- Galea, E.R. Pedestrian and Evacuation Dynamics; CMS Press: Greenwich, UK, 2003; p. 411. [Google Scholar]
- Waldau, N.; Gattermann, P.; Knoflacher, H.; Schreckenberg, M. Pedestrian and Evacuation Dynamics; Springer: Berlin, Germany, 2006; p. 495. [Google Scholar]
- Klingsch, W.W.F.; Rogsch, C.; Schadschneider, A.; Schreckenberg, M. Pedestrian and Evacuation Dynamics 2008; Springer: Berlin, Germany, 2010; p. 847. [Google Scholar]
- Peacock, R.D.; Kuligowski, E.D. Pedestrian and Evacuation Dynamics; Springer: Berlin, Germany, 2011; p. 910. [Google Scholar]
- Balmer, M.; Rieser, M.; Meister, K.; Charypar, D.; Lefebvre, N.; Nagel, K. MATSim-T: Architecture and Simulation Times. In Multi-Agent Systems for Traffic and Transportation Engineering; Bazzan, A.L.C., Klugl, F., Eds.; Idea Group Reference: Hershey, PA, USA, 2009; pp. 57–78. [Google Scholar]
- MATSim MATSim: Multi-Agent Transport Simulation Toolkit. Available online: http://www.matsim.org/ (accessed on 12 May 2012).
- Meister, K.; Balmer, M.; Ciari, F.; Horni, A.; Rieser, M.; Waraich, R.A.; Axhausen, K.W. Large-Scale Agent-Based Travel Demand Optimization Applied to Switzerland, Including Mode Choice. In Proceedings of 12th World Conference on Transportation Research, Lisbon, Portugal, 11–15 July 2010; p. 30.
- Bekhor, S.; Dobler, C.; Axhausen, K.W. Integration of Activity-Based with Agent-Based Models: an Example from the Tel Aviv Model and MATSim. In Proceedings of 90th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 23–27 January 2011; p. 16.
- Bakillah, M.; Klüpfel, H.; Lämmel, G.; Zipf, A. Agent Based Simulation for Disaster Preparedness. In Proceedings of 6th International Conference on Pedestrian and Evacuation Dynamics (PED 2012), Zurich, Switzerland, 6–8 June 2012.
- Bakillah, M.; Klüpfel, H.; Lämmel, G.; Zipf, A. Toward a Generic Data Model for Multi-Agents Evacuation Simulation in Disaster Management Context. In Proceedings of 2nd International Conference on Evacuation Modeling and Management, Chicago, IL, USA, 13–15 August 2012.
- Lämmel, G.; Klüpfel, H.; Nagel, K. The MATSim Network Flow Model for Traffic Simulation Adapted to Large-Scale Emergency Egress and an Application to the Evacuation of the Indonesian City of Padang in Case of a Tsunami Warning. In Pedestrian Behavior: Models, Data Collection and Applications; Timmermans, H., Ed.; Emerald Group Publishing Limited: Bingley, UK, 2009; pp. 245–264. [Google Scholar]
- Gao, W.; Balmer, M.; Miller, E.J. Comparisons between MATSim and EMME/2 on the Greater Toronto and Hamilton Area Network. Transp. Res. Record 2010, 2197, 118–128. [Google Scholar]
- Cetin, N.; Nagel, K. Parallel Queue Model Approach to Traffic Microsimulations. In Proceedings of 82th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 12–16 January 2003; p. 10.
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 267–271. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE T. Syst. Sci. Cyb. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Lorenz, B.; Ohlbach, H.J.; Stoffel, E.P. A Hybrid Spatial Model for Representing Indoor Environments. In Proceedings of 6th International Symposium on Web and Wireless Geographical Information Systems (W2GIS 2006), Hong Kong, China, 4–5 December 2006; pp. 102–112.
- Zlatanova, S. SII for Emergency Response: The 3D Challenges. In Proceedings of XXI ISPRS Congress, Beijing, China, 3–11 July 2008; Part B4-TYC IV, pp. 1631–1637.
- Lee, J. A spatial access oriented implementation of a topological data model for 3D urban entities. GeoInformatica 2004, 8, 235–262. [Google Scholar]
- Yuan, W.; Schneider, M. iNav: An Indoor Navigation Model Supporting Length-Dependent Optimal Routing. In Proceedings of 13th AGILE International Conference on Geographic Information Science, Guimarães, Portugal, 10–14 May 2010.
- Goetz, M.; Zipf, A. Formal definition of a user-adaptive and length-optimal routing graph for complex indoor environments. Geo-Spat. Inf. Sci. 2011, 14, 119–128. [Google Scholar] [CrossRef]
- Felkel, P.; Obdrmalek, S. Straight Skeleton Implementation. In Proceedings of 14th Spring Conference on Computer Graphics, Budmerice, Slovakia, 1998; pp. 210–218.
- Weidmann, U. Transporttechnik der Fussgänger, Transporttechnische Eigenschaften des Fussgängerverkehrs (Literturauswertung); Institut für Verkehrsplanung, Transporttechnik, Strassen- und Eisenbahnbau (IVG) ETH Zurich: Zurich, Switzerland, 1993. [Google Scholar]
- Auer, S.; Lehmann, J.; Hellmann, S. LinkedGeoData: Adding a Spatial Dimension to the Web of Dat. In Proceedings of 8th International Semantic Web Conference (ISWC 2009), Washington, DC, USA, 25–29 October 2009; pp. 731–746.
- Resch, B.; Zipf, A.; Breuss-Schneeweis, P.; Beinat, E.; Boher, M. Live Cities and Urban Services: A Multi-dimensional Stress Field between Technology, Innovation and Society. In Proceedings of 4th International Conference on Advanced Geographic Information SystemsApplicationsand Services (GEOProcessing 2012), Valencia, Spain, 30 January–4 February 2012; pp. 28–34.
- Botts, M.; Percivall, G.; Reed, C.; Davidson, J. OGC® Sensor Web Enablement: Overview and High Level Architecture. In Proceedings of Geosensor Networks: Second International Conference GSN, Boston, MA, USA, 1–3 October 2006.
- Uden, M.; Zipf, A. OpenBuildingModels: Towards a Platform for Crowdsourcing Virtual 3D Cities. In Proceedings of 7th 3D GeoInfo, Quebec City, QC, Canada, 16–17 May 2012; p. 17.
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Goetz, M.; Zipf, A. Using Crowdsourced Geodata for Agent-Based Indoor Evacuation Simulations. ISPRS Int. J. Geo-Inf. 2012, 1, 186-208. https://doi.org/10.3390/ijgi1020186
Goetz M, Zipf A. Using Crowdsourced Geodata for Agent-Based Indoor Evacuation Simulations. ISPRS International Journal of Geo-Information. 2012; 1(2):186-208. https://doi.org/10.3390/ijgi1020186
Chicago/Turabian StyleGoetz, Marcus, and Alexander Zipf. 2012. "Using Crowdsourced Geodata for Agent-Based Indoor Evacuation Simulations" ISPRS International Journal of Geo-Information 1, no. 2: 186-208. https://doi.org/10.3390/ijgi1020186