
Applicability Analysis of VTEC Derived from the Sophisticated Klobuchar Model in China

Abstract
:1. Introduction
2. Method of the Sophisticated Model
2.1. Dual-Frequency Observation Model
2.2. Klobuchar Model
2.3. Holt–Winters Exponential Smoothing Model to Sophisticated Klobuchar Model
3. Results and Discussion
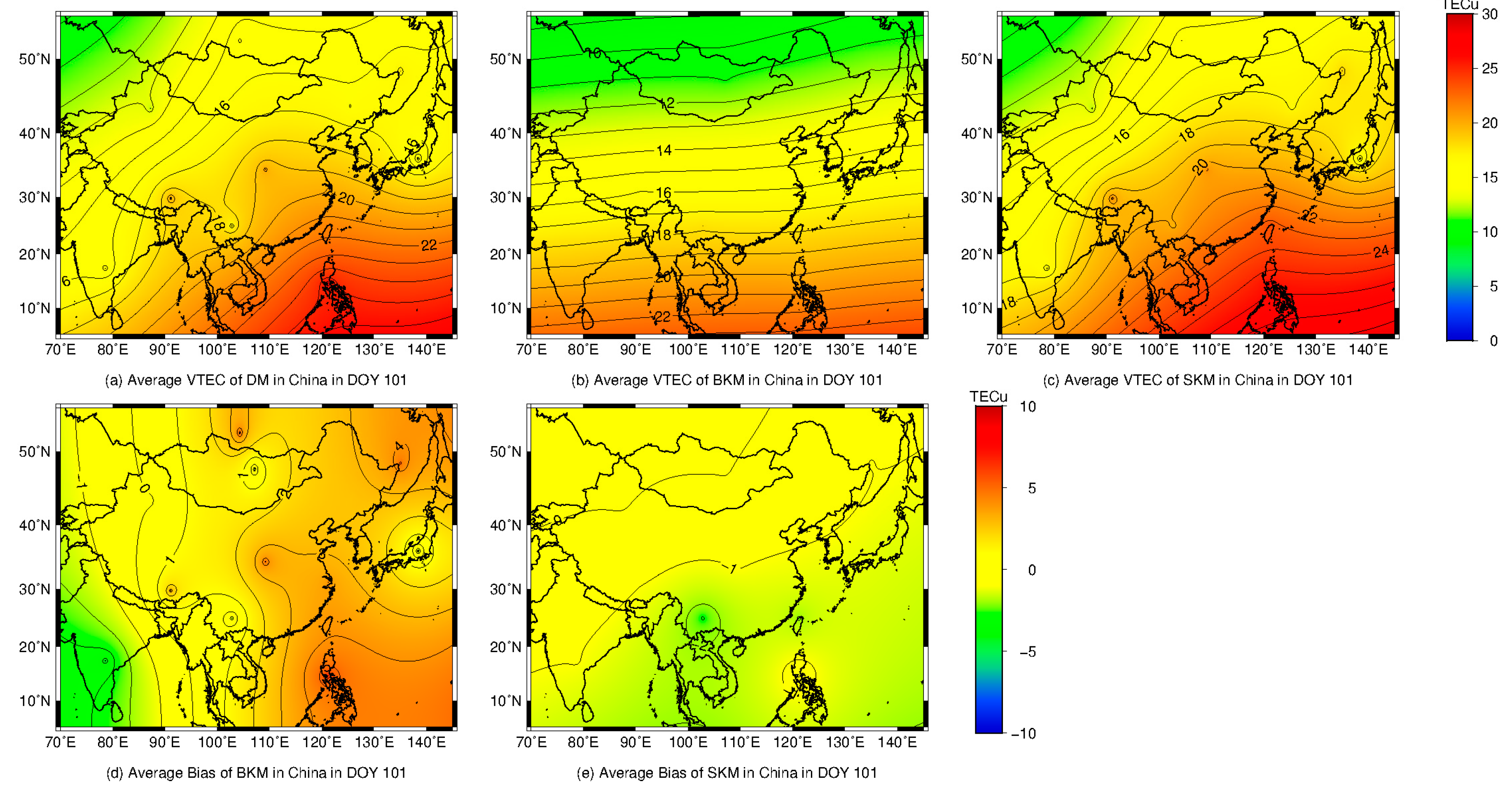
3.1. Result of Modeling in China
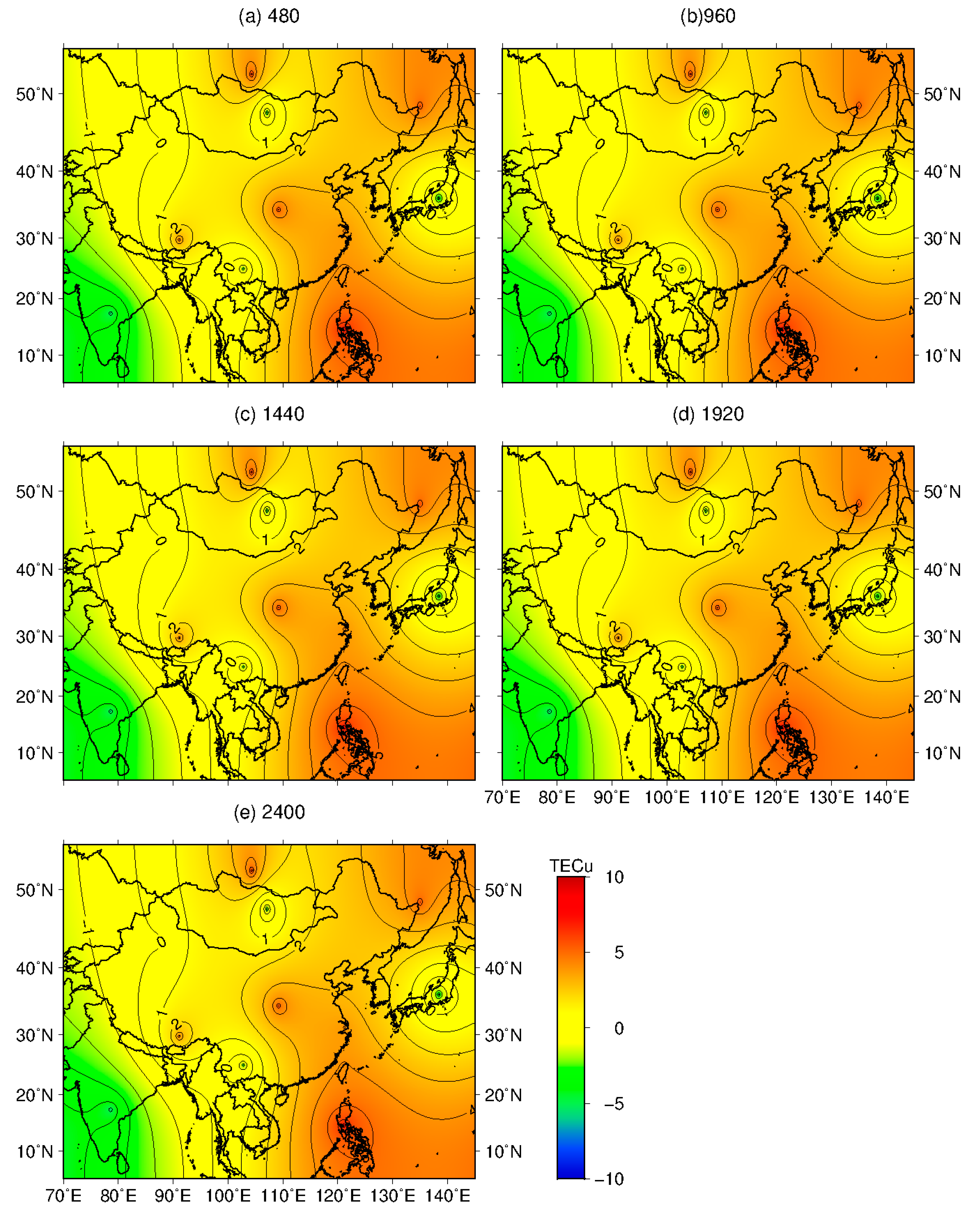
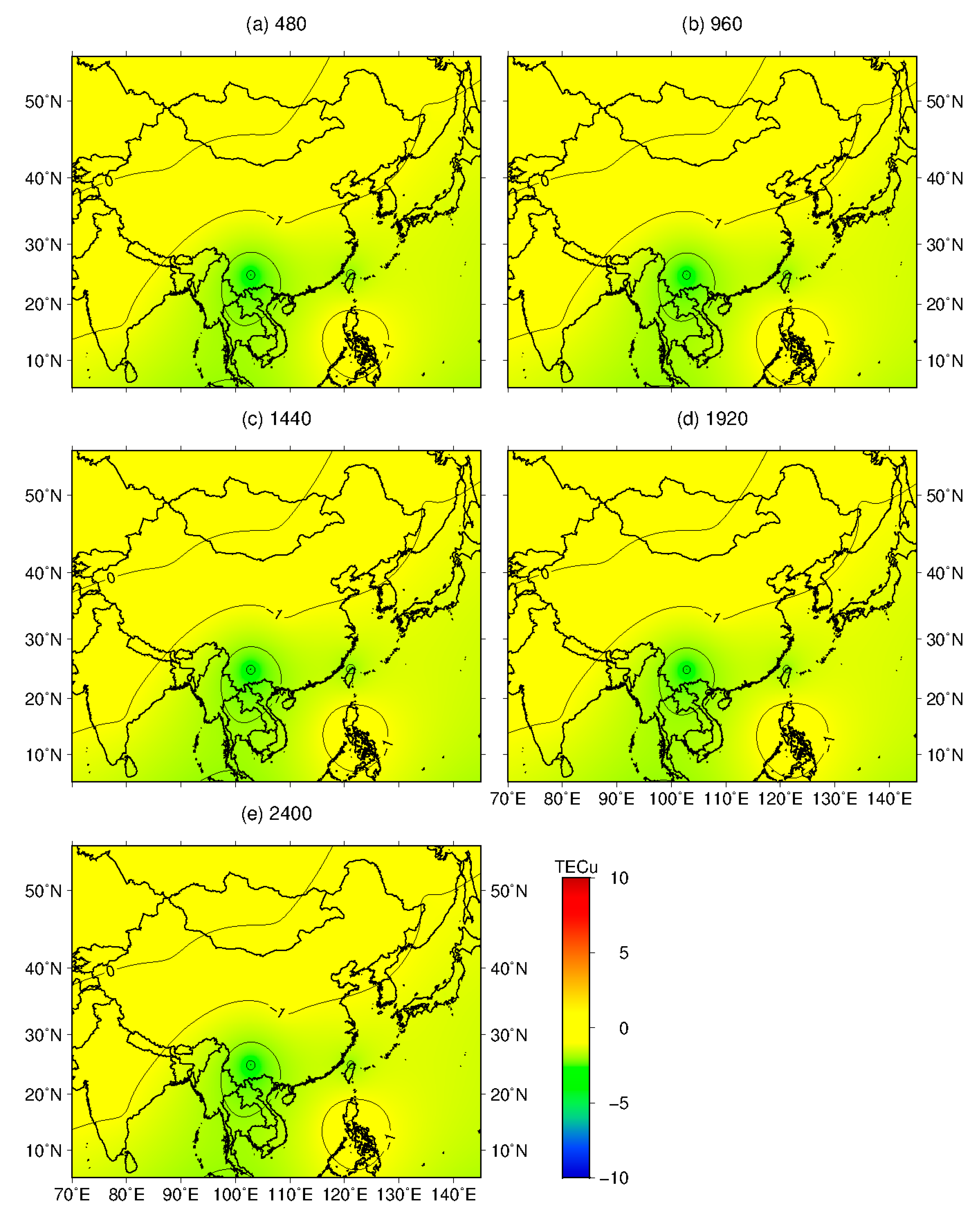
3.2. Result of Modeling in China, Considering Missing Epochs
4. Conclusions
- (1)
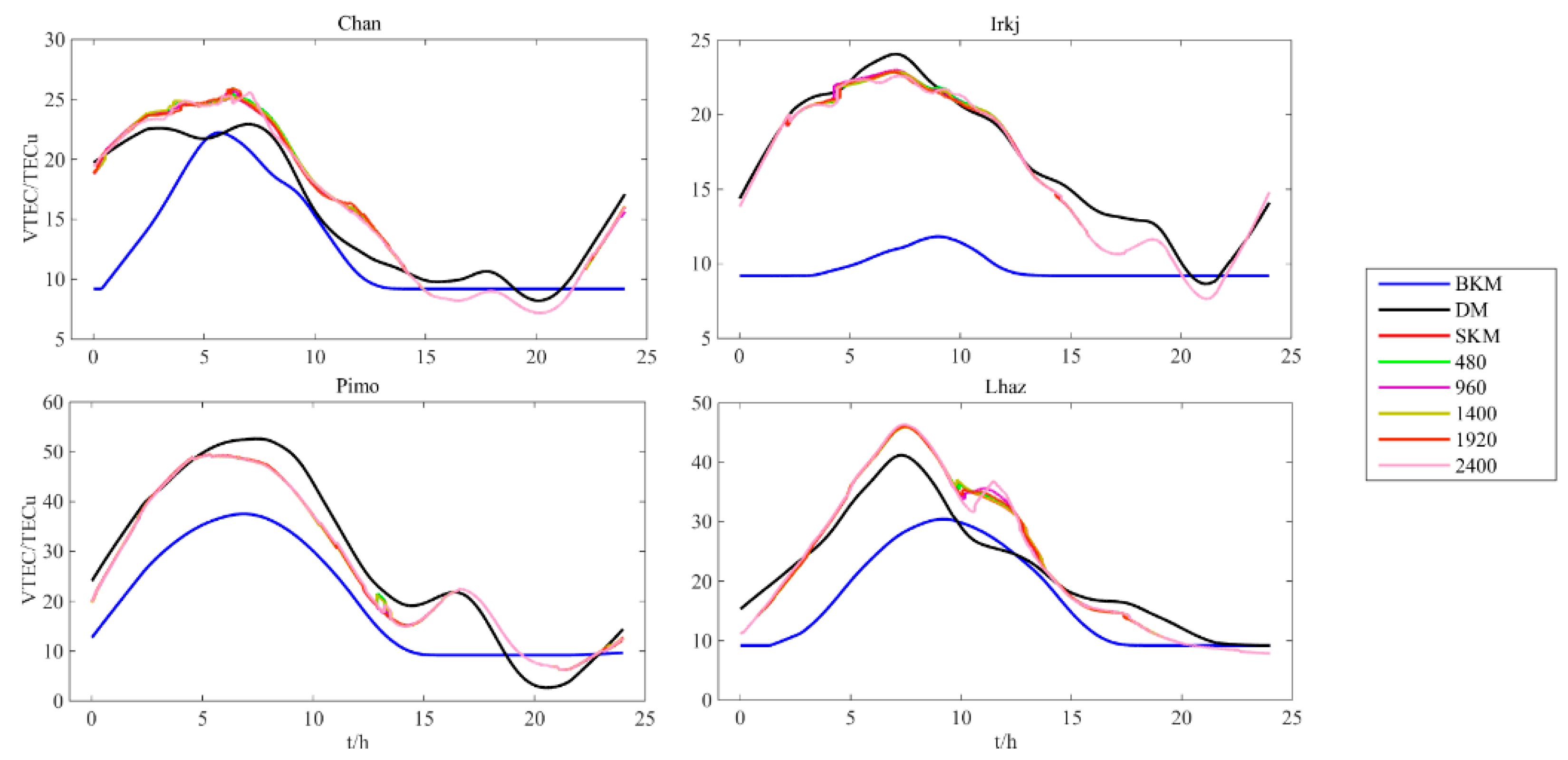
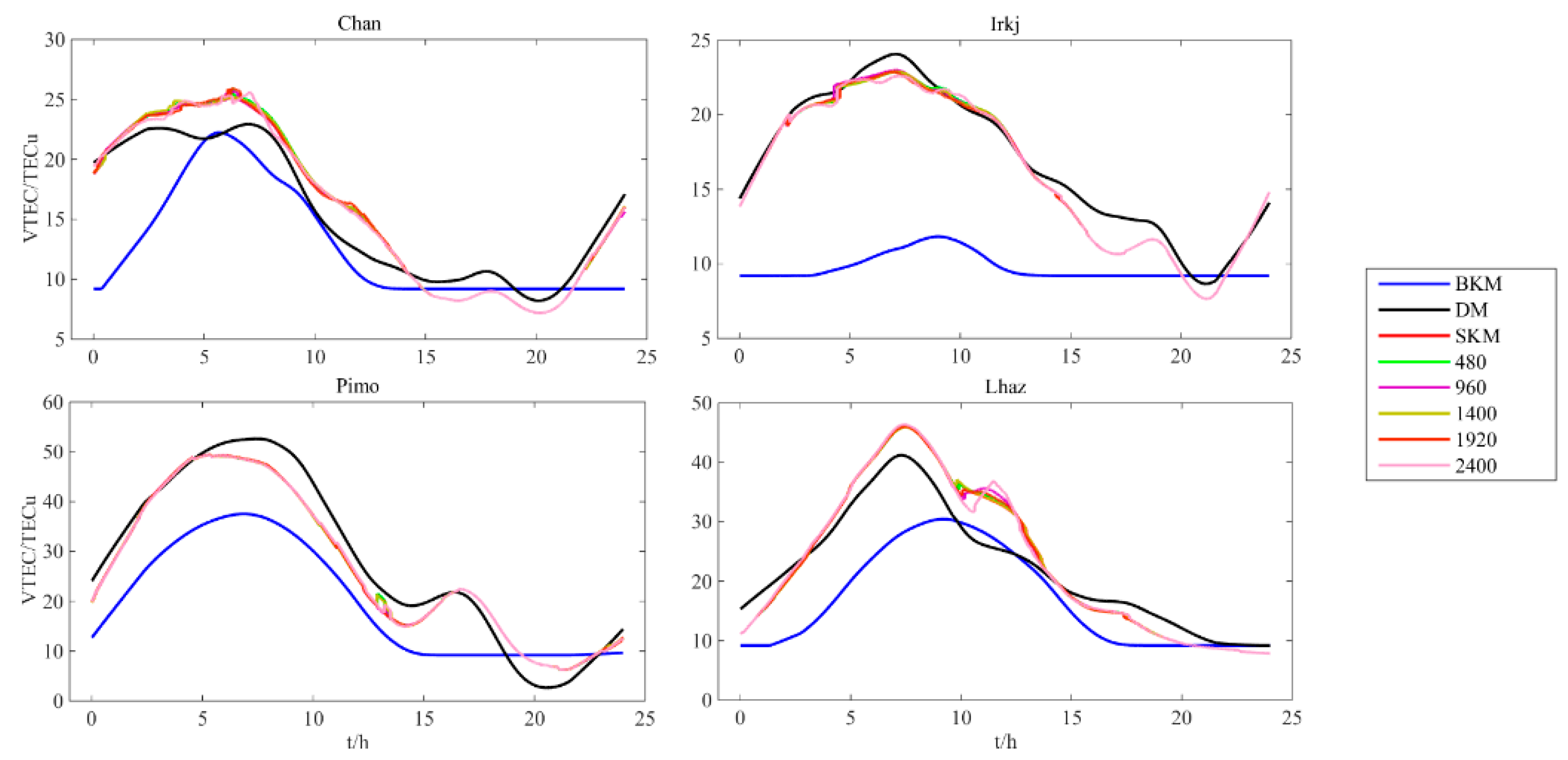
- SKM with no epoch missing and SKM with an epoch missing can better fit the trend of DM. SKM can better reflect the temporal changes of the ionosphere, especially at night.
- (2)
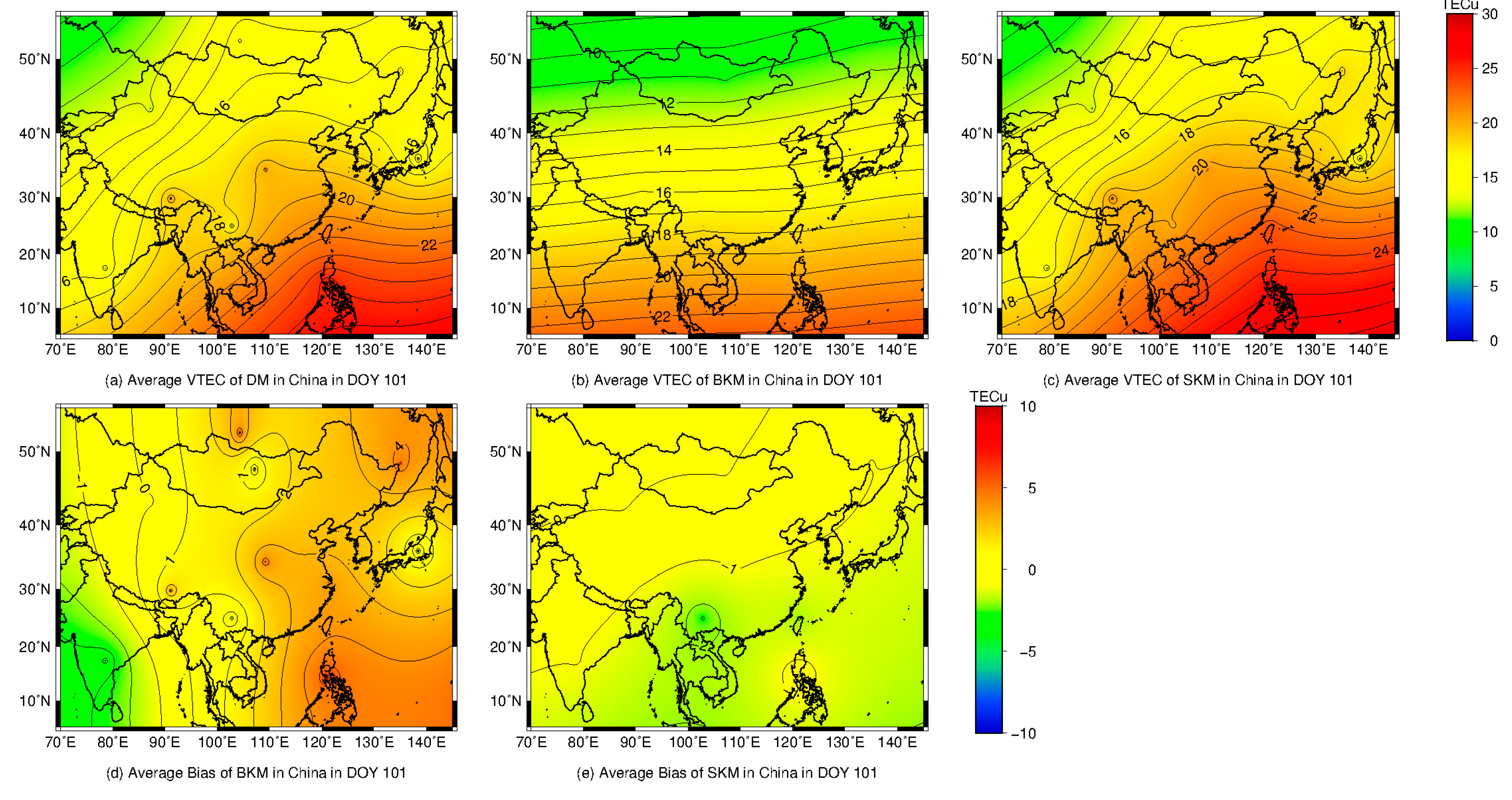
- The correction results of the ionospheric delay increase with increasing latitude. All correction results of the ionospheric delay are improved compared to those of BKM during the day. However, at night, the correction results are significantly improved compared to those of BKM. This finding indicates the validity of this method to improve the BKM.
- (3)
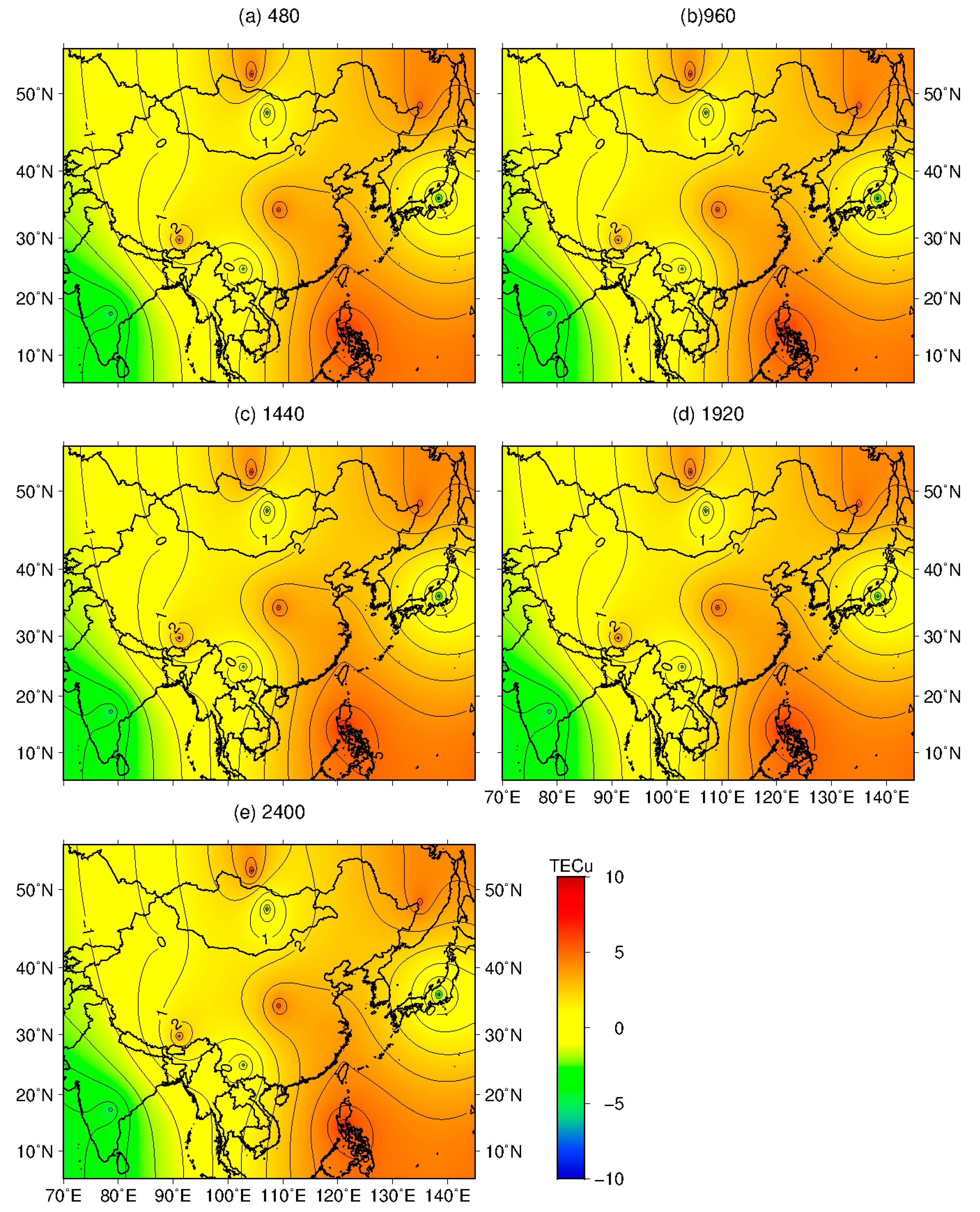
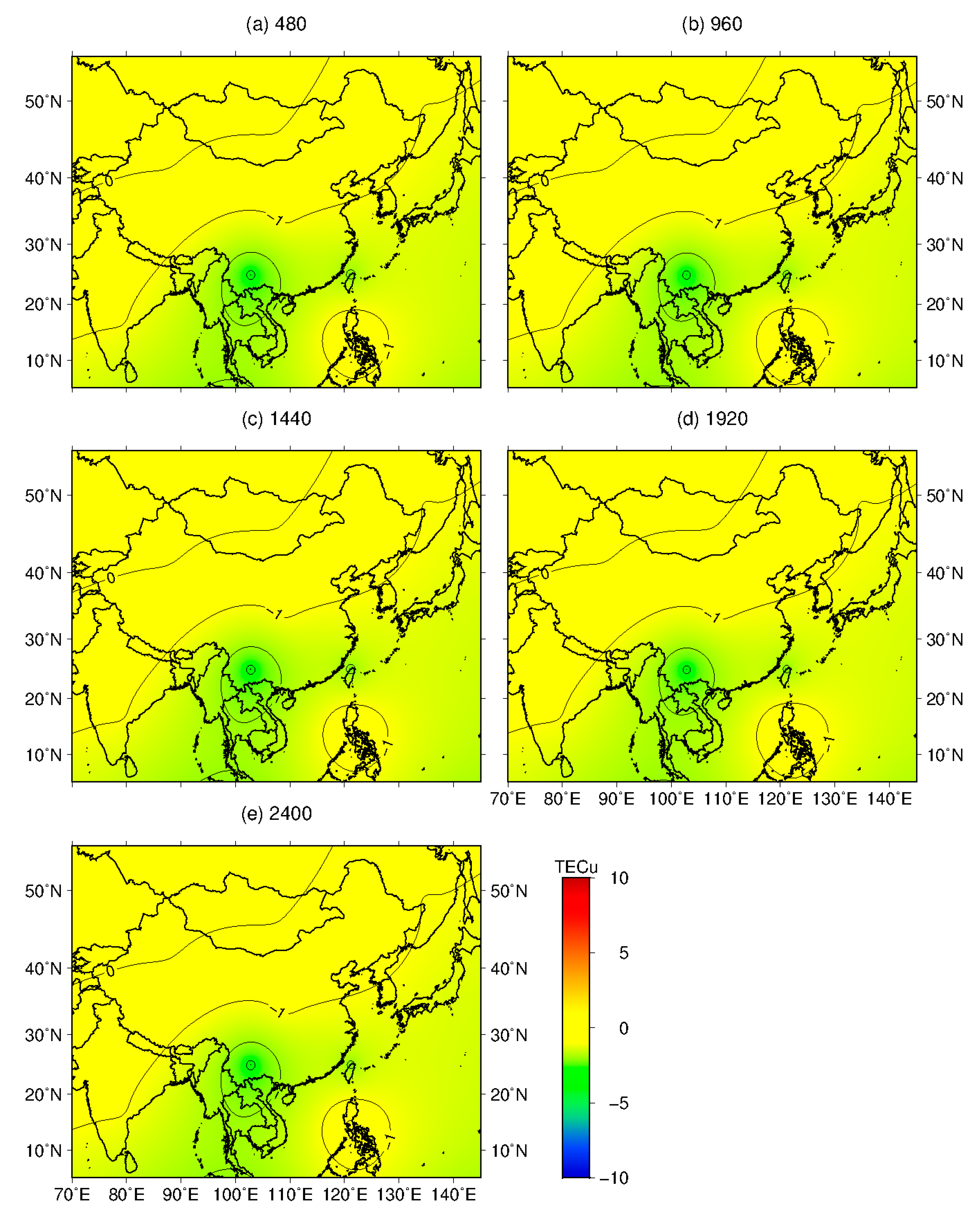
- The cubic spline curve method is used to repair the missing epoch data when the observation data have an epoch missing in some situations. Then, SKM is improved. It can also yield a remarkable result. The correction results of ionospheric delay are nearly identical to those of SKM with no epochs missing, with only a slight difference remaining. This difference may be random.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, R.; Song, W.W.; Yao, Y.B.; Shi, C.; Lou, Y.D.; Yi, W.T. Modeling regional ionospheric delay with ground-based BeiDou and GPS observations in China. GPS Solut. 2015, 19, 649–658. [Google Scholar] [CrossRef]
- Ercha, A.; Huang, W.G.; Liu, S.Q.; Shi, L.Q.; Gong, J.C.; Chen, Y.H.; Shen, H. A regional ionospheric TEC mapping technique over China and adjacent areas: GNSS data processing and DINEOF analysis. Sci. China Inform. Sci. 2015, 58, 1–11. [Google Scholar] [CrossRef]
- Zhao, Q.L.; Wang, G.X.; Liu, Z.Z.; Hu, Z.G.; Dai, Z.Q.; Liu, J.N. Analysis of BeiDou Satellite measurements with code multipath and geometry-free ionosphere-free combinations. Sensors 2016, 16, 123. [Google Scholar] [CrossRef] [PubMed]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Aragón-Àngel, A.; García-Rigo, A.; Salazar, D.; Escudero, M. The ionosphere: Effects, GPS modeling and the benefits for space geodetic techniques. J. Geod. 2011, 85, 887–907. [Google Scholar] [CrossRef]
- Klobuchar, J.A. Ionospheric time delay algorithm for single frequency GNSS Users. IEEE Trans. Aerosp. Elec. Syst. 1987, 23, 325–331. [Google Scholar] [CrossRef]
- European Commission. European GNSS (Galileo) Open Service–Ionospheric Correction Algorithm for Galileo Single Frequency Users; Issue 1.2; European Commission: Brussels, Belgium, 2016. [Google Scholar]
- China Satellite Navigation Office (CSNO). BeiDou Navigation Satellite System Signal in Space Interface Control Document-Open Service Signal B1I (Version 2.0); CSNO: Beijing, China, 2012. [Google Scholar]
- Skone, S.; Yousuf, R.; Coster, A. Performance evaluation of Wide Area Augmentation System for ionospheric storm events. Positioning 2004, 3, 251–258. [Google Scholar] [CrossRef]
- Migoya-Orué, Y.; Nava, B.; Radicella, S.; Alazo-Cuartas, K. GNSS derived TEC data ingestion into IRI 2012. Adv. Space Res. 2015, 55, 29–41. [Google Scholar] [CrossRef]
- Daniell, R.E.; Brown, L.D.; Anderson, D.N.; Fox, M.W.; Doherty, P.H.; Decker, D.T.; Sojka, J.J.; Schunk, R.W. Parameterized ionospheric model: A global ionospheric parameterization based on first principles models. Radio Sci. 1995, 30, 1499–1510. [Google Scholar] [CrossRef]
- Xiang, Y.; Yuan, Y.B.; Li, Z.S.; Wang, N.B. Analysis and validation of different global ionospheric maps (GIMs) over China. Adv. Space Res. 2015, 55, 199–210. [Google Scholar] [CrossRef]
- Angrisano, A.; Gaglione, S.; Gioia, C.; Massaro, M.; Troisi, S. Benefit of the NeQuick Galileo version in GNSS single-point positioning. Int. J. Navig. Obs. 2013, 2013, 302947. [Google Scholar] [CrossRef]
- Wang, N.B.; Yuan, Y.B.; Li, Z.S.; Huo, X.L. Impact of ionospheric correction on single-frequency GNSS positioning. In China Satellite Navigation Conference (CSNC) 2013 Proceedings; Springer: Berlin/Heidelberg, Germany, 2013; pp. 471–486. [Google Scholar]
- Hoque, M.M.; Jakowski, N. An alternative ionospheric correction model for global navigation satellite systems. J. Geod. 2014, 89, 391–406. [Google Scholar] [CrossRef]
- Wang, N.B.; Yuan, Y.B.; Li, Z.S.; Huo, X.L. Improvement of Klobuchar model for GNSS single-frequency ionospheric delay corrections. Adv. Space Res. 2016, 57, 1555–1569. [Google Scholar] [CrossRef]
- Li, Z.S.; Yuan, Y.B.; Wang, N.B.; Hernandez-Pajares, M.; Huo, X.L. SHPTS: Towards a new method for generating precise global ionospheric TEC map based on spherical harmonic and generalized trigonometric series functions. J. Geod. 2015, 89, 331–345. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Orus, R.; Garcia-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.C.; Krankowski, A. The IGS VTEC maps: A reliable source of ionospheric information since 1998. J. Geod. 2009, 83, 263–275. [Google Scholar] [CrossRef]
- Gulyaeva, T.L.; Arikan, F.; Hernandez-Pajares, M.; Stanislawska, I. GIM-TEC adaptive ionospheric weather assessment and forecast system. J. Atmos. Sol. Terr. Phys. 2013, 102, 329–340. [Google Scholar] [CrossRef] [Green Version]
- Macalalad, E.P.; Tsai, L.C.; Wu, J.; Liu, C.H. Application of the TaiWan Ionospheric Model to single-frequency ionospheric delay corrections for GPS positioning. GPS Solut. 2011, 17, 337–346. [Google Scholar] [CrossRef]
- Komjathy, A. Global Ionospheric Total Electron Content Mapping Using the Global Positioning System; University of New Brunswick: Fredericton, NB, Canada, 1997. [Google Scholar]
- Liu, Z.Z.; Yang, Z. Anomalies in broadcast ionospheric coefficients recorded by GPS receivers over the past two solar cycles (1992–2013). GPS Solut. 2015, 20, 23–37. [Google Scholar] [CrossRef]
- Dach, R.; Brockmann, E.; Schaer, S.; Beutler, G.; Meindl, M.; Prange, L. GNSS processing at CODE: Status report. J. Geod. 2009, 83, 353–365. [Google Scholar] [CrossRef]
- Yuan, Y.B.; Huo, X.; Ou, J.K.; Zhang, K.F.; Chai, Y.J.; Wen, D.B.; Grenfell, R. Refining the Klobuchar ionospheric coefficients based on GPS observations. IEEE Trans. Aerosp. Elec. Syst. 2008, 44, 1498–1510. [Google Scholar] [CrossRef]
- Wu, X.L.; Hu, X.G.; Wang, G.; Zhong, H.J.; Tang, C.P. Evaluation of COMPASS ionospheric model in GNSS positioning. Adv. Space Res. 2013, 51, 959–968. [Google Scholar] [CrossRef]
- Rethika, T.; Mishra, S.; Nirmala, S.; Rathnakara, S.C.; Ganeshan, A.S. Single frequency ionospheric error correction using coefficients generated from regional ionospheric data for IRNSS. Indian J. Radio Space Phys. 2013, 43, 125–130. [Google Scholar]
- Filjar, R.; Kos, T.K.S. Klobuchar-like local model of quiet space weather GPS ionospheric delay for northern Adriatic. J. Navig. 2009, 62, 543–554. [Google Scholar] [CrossRef]
- Han, L.; Zhang, H.P.; Huang, Y.D.; Wang, M.Y.; Zhu, W.Y.; Ping, J.S. Improving Klobuchar Type Ionospheric Delay Model using 2D GPS TEC over China. In Proceedings of the 36th COSPAR Scientific Assembly, Beijing, China, 16–23 July 2006.
- Gao, Y.; Liu, Z.Z. Precise ionospheric modelling using regional GPS network data. Positioning 2010, 1, 18–24. [Google Scholar] [CrossRef]
- Hansen, A.; Blanch, J.; Walter, T. Ionospheric Correction Analysis for WAAS Quiet and Stormy. In Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000.
- Hatch, R. Synergism of GPS code and carrier measurements. In Proceedings of the 3rd International Geodetic Symposium on Satellite Doppler Positioning, New Mexico State University, Las Cruces, NM, USA, 8–12 Febuary 1982.
- Hatch, R. Dynamic differential GPS at the centimeter level. In Proceedings of the 4th International Geodetic Symposium on Satellite Positioning, Austin, TX, USA, 28 April–2 May 1986.
- Lachapelle, G.; Hagglund, J.; Falkenberg, W. GPS land kinematic positioning experiments. In Proceedings of the 4th International Geodetic Symposium on Satellite Positioning, Austin, TX, USA, 28 April–2 May 1986.
- Liu, Z.Z.; Gao, Y. Ionospheric tomography using GPS measurements. In Proceedings of the International Symposium on Kinematic Systems in Geodesy, Geomatics and Navigation, Banff, AB, Canada, 5–8 June 2001.
- Sardon, E.; Rius, A.; Zarraoa, N. Estimation of the transmitter and receiver differential biases and the ionospheric total electron from Global Positioning System observations. Radio Sci. 1994, 29, 577–586. [Google Scholar] [CrossRef]
- Komjathy, A.; Langley, R.B. The effect of shell height on high precision ionospheric modelling using GPS. In Proceedings of the 1996 IGS Workshop, Silver Spring, MD, USA, 19–21 March 1996.
- Komjathy, A.; Wilson, B.D.; Runge, T.F. A new ionospheric model for wide area differential GPS: The multiple shell approach. In Proceedings of the National Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 28–30 January 2002.
- Mannucci, A.J.; Wilson, B.D.; Yuan, D.N.; Ho, C.H.; Lindqwister, U.J.; Runge, T.F. A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci. 1998, 33, 565–582. [Google Scholar] [CrossRef]
- Acob, N.Y.; Abdullah, M.; Ismail, M. Determination of GPS total electron content using single layer model (SLM) ionospheric mapping function. Int. J. Comput. Sci. Netw. Secur. 2008, 8, 154–169. [Google Scholar]
- Holt, C.C. Forecasting Seasonal and Trends by Exponentially Weighted Moving Averages. Int. J. Forecast. 2004, 20, 5–10. [Google Scholar] [CrossRef]
- Vroman, P.; Happiette, M.; Rabenasolo, B. Fuzzy Adaptation of the Holt–Winter Model for Textile Sales-forecasting. J. Text. Inst. 1998, 89, 78–89. [Google Scholar] [CrossRef]
- Kamranrad, R.; Amiri, A. Robust Holt-Winter Based Control Chart for Monitoring Autocorrelated Simple Linear Profiles with Contaminated Data. Sci. Iran. 2016, 23, 1345–1354. [Google Scholar]
- Kazempour, M.K. Stationary Forecasting; Using Holt-Winter and a Modification of Holt-Winter. Biom. J. 2007, 32, 347–356. [Google Scholar] [CrossRef]
- Smith, W.H.F.; Wessel, P. Gridding with continuous curvature splines in tension. Geophysics 2012, 55, 293–305. [Google Scholar] [CrossRef]
- Robinson, M.P.; Fairweather, G. Orthogonal cubic spline collocation solution of underwater acoustic wave propagation problems. J. Comput. Acoust. 2012, 1, 355–370. [Google Scholar] [CrossRef]
- Paul, K.S.; Das, A.; Ray, S.; Paul, A. Characteristics of Total Electron Content (TEC) observed from a chain of stations near the northern crest of the Equatorial Ionization Anomaly (EIA) along 88.5° E meridian in India. J. Atmos. Sol. Terr. Phys. 2015, 137, 17–28. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stations | Model | Time Period (Corrective Rate /RMSE) | ||||||
|---|---|---|---|---|---|---|---|---|
| 0 UT–4 UT | 4 UT–8 UT | 8 UT–12 UT | 12 UT–16 UT | 16 UT–20 UT | 20 UT–24 UT | Average | ||
| IRKJ | BKM | 49.5/9.90 | 45.2/12.65 | 53.4/9.74 | 58.6/6.73 | 73.2/3.55 | 87.4/2.07 | 61.2/7.44 |
| SKM | 98.0/0.41 | 96.7/0.86 | 98.4/0.40 | 94.5/1.04 | 87.0/1.80 | 93.8/0.67 | 94.8/0.86 | |
| 480 | 98.0/0.42 | 96.5/0.90 | 98.2/0.41 | 94.5/1.04 | 87.0/1.80 | 93.8/0.67 | 94.7/0.88 | |
| 960 | 98.0/0.42 | 96.9/0.80 | 98.5/0.38 | 94.4/1.05 | 87.0/1.80 | 93.8/0.67 | 94.8/0.85 | |
| 1440 | 98.0/0.41 | 96.5/0.90 | 98.4/0.40 | 94.6/1.04 | 87.0/1.80 | 93.8/0.67 | 94.7/0.87 | |
| 1920 | 98.0/0.42 | 96.5/0.93 | 98.5/0.42 | 94.4/1.05 | 87.0/1.80 | 93.8/0.67 | 94.7/0.88 | |
| 2400 | 97.9/0.44 | 95.9/1.10 | 97.8/0.55 | 94.6/1.04 | 87.0/1.80 | 93.8/0.67 | 94.5/0.93 | |
| CHAN | BKM | 60.8/8.71 | 93.5/1.83 | 91.7/1.62 | 87.4/1.51 | 91.1/0.96 | 78.5/3.79 | 83.8/3.07 |
| SKM | 95.5/1.12 | 89.6/2.38 | 85.2/2.32 | 87.6/1.65 | 85.2/1.49 | 90.0/1.11 | 88.9/1.68 | |
| 480 | 95.5/1.13 | 89.0/2.51 | 85.1/2.33 | 87.5/1.66 | 85.2/1.49 | 90.0/1.70 | 88.7/1.70 | |
| 960 | 95.3/1.14 | 89.7/2.40 | 86.1/2.21 | 87.7/1.61 | 85.2/1.49 | 90.0/1.12 | 89.0/1.66 | |
| 1440 | 94.8/1.30 | 89.4/2.43 | 85.1/2.35 | 87.6/1.64 | 85.2/1.49 | 90.1/1.09 | 88.7/1.72 | |
| 1920 | 96.0/0.99 | 89.1/2.54 | 85.7/2.28 | 87.1/1.72 | 85.2/1.49 | 90.2/1.08 | 88.9/1.68 | |
| 2400 | 96.5/0.97 | 89.3/2.46 | 86.4/2.19 | 88.1/1.54 | 85.2/1.49 | 90.3/1.07 | 89.3/1.62 | |
| LHAZ | BKM | 50.8/10.73 | 64.2/12.88 | 90.5/4.23 | 88.8/2.64 | 63.0/5.81 | 93.8/1.06 | 75.2/6.22 |
| SKM | 88.7/2.48 | 90.5/3.68 | 77.0/6.81 | 88.8/3.50 | 83.0/2.54 | 86.9/1.38 | 85.8/3.40 | |
| 480 | 88.7/2.49 | 90.4/3.70 | 76.6/6.94 | 89.3/3.43 | 83.2/2.56 | 86.9/1.38 | 85.8/3.42 | |
| 960 | 88.7/2.48 | 90.4/3.72 | 76.2/7.13 | 89.5/3.50 | 83.2/2.56 | 86.9/1.38 | 85.8/3.46 | |
| 1440 | 88.7/2.49 | 90.4/3.66 | 77.0/6.82 | 88.8/3.51 | 83.2/2.55 | 86.9/1.38 | 85.8/3.40 | |
| 1920 | 88.8/2.47 | 90.3/3.74 | 76.9/6.87 | 89.2/3.48 | 82.9/2.59 | 86.9/1.38 | 85.8/3.42 | |
| 2400 | 89.4/2.39 | 89.8/3.93 | 77.7/7.01 | 90.0/3.44 | 83.5/2.51 | 86.9/1.38 | 86.1/3.44 | |
| PIMO | BKM | 63.7/12.95 | 71.0/14.78 | 69.3/13.39 | 55.5/9.49 | 43.1/8.12 | -0.49/4.52 | 49.6/10.54 |
| SKM | 94.5/2.13 | 95.1/3.06 | 86.6/5.83 | 85.2/3.33 | 64.4/2.93 | 37.3/2.68 | 77.2/3.33 | |
| 480 | 94.5/2.12 | 95.0/3.09 | 86.5/5.83 | 85.2/3.32 | 64.4/2.93 | 37.4/2.68 | 77.2/3.33 | |
| 960 | 94.5/2.12 | 95.1/3.07 | 86.6/5.81 | 84.0/3.58 | 64.4/2.93 | 37.4/2.68 | 77.0/3.37 | |
| 1440 | 94.7/2.08 | 95.1/3.08 | 86.5/5.85 | 85.3/3.29 | 64.4/2.93 | 37.3/2.68 | 77.2/3.32 | |
| 1920 | 94.6/2.09 | 95.2/2.98 | 86.8/5.73 | 84.0/3.57 | 64.4/2.93 | 36.8/2.71 | 77.0/3.33 | |
| 2400 | 94.6/2.12 | 95.1/3.09 | 87.2/5.65 | 84.7/3.42 | 64.4/2.93 | 36.9/2.69 | 77.1/3.32 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Huang, L.; Liu, L.; Wu, P.; Qin, X. Applicability Analysis of VTEC Derived from the Sophisticated Klobuchar Model in China. ISPRS Int. J. Geo-Inf. 2017, 6, 75. https://doi.org/10.3390/ijgi6030075
Chen J, Huang L, Liu L, Wu P, Qin X. Applicability Analysis of VTEC Derived from the Sophisticated Klobuchar Model in China. ISPRS International Journal of Geo-Information. 2017; 6(3):75. https://doi.org/10.3390/ijgi6030075
Chicago/Turabian StyleChen, Jun, Liangke Huang, Lilong Liu, Pituan Wu, and Xuyuan Qin. 2017. "Applicability Analysis of VTEC Derived from the Sophisticated Klobuchar Model in China" ISPRS International Journal of Geo-Information 6, no. 3: 75. https://doi.org/10.3390/ijgi6030075