
Impact of High-Resolution Topographic Mapping on Beach Morphological Analyses Based on Terrestrial LiDAR and Object-Oriented Beach Evolution


Abstract
:1. Introduction
2. Methods
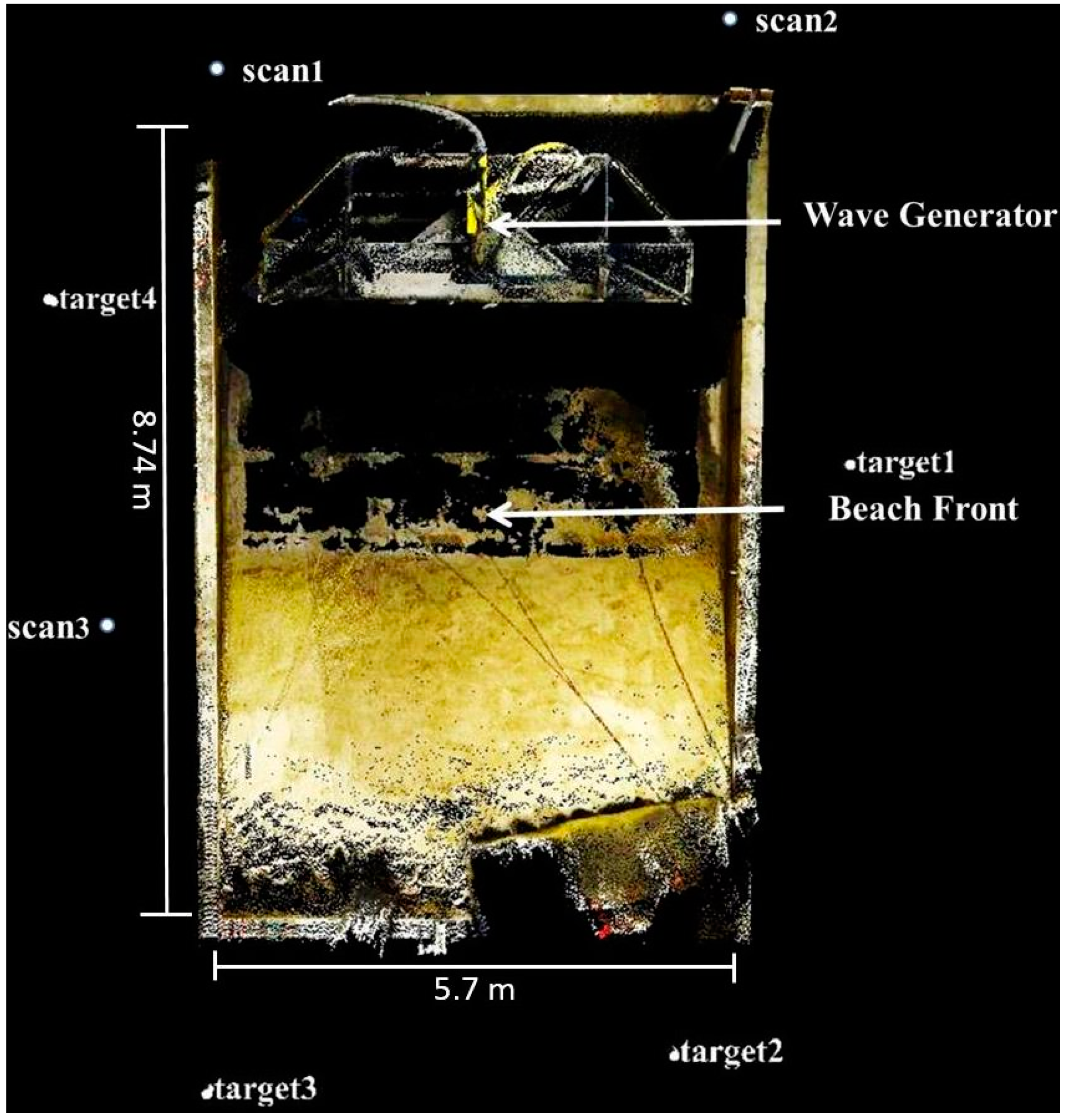
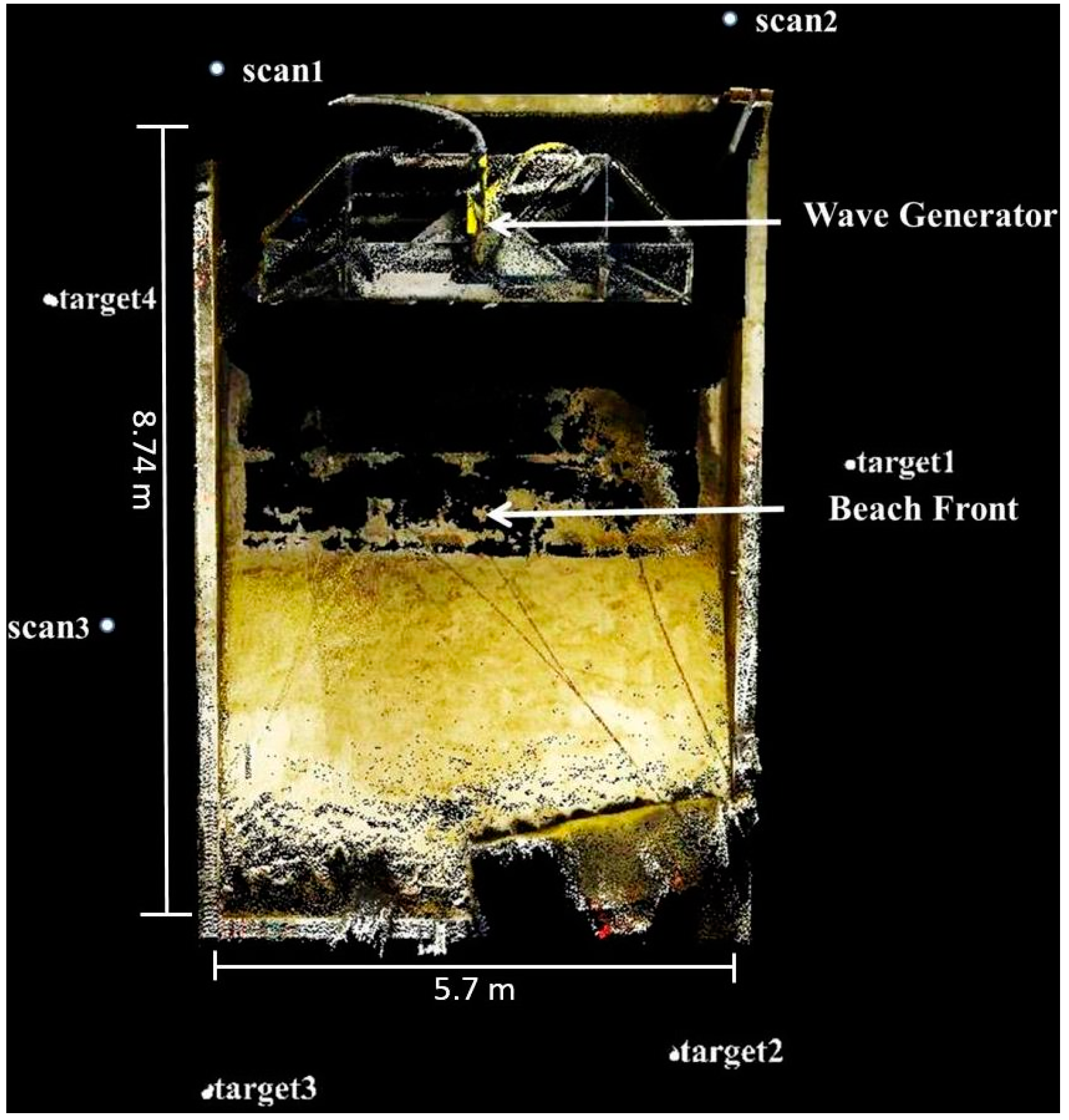
2.1. Laboratory Experiment Setup and Data Collection
2.2. High-Resolution Topographical Mapping Based on Terrestrial LiDAR and Wave Tank Experiment
2.3. Wave Modeling Based on High-Resolution Morphological Models
2.4. Analysis of Resolution Impact on Beach Topographic Mapping and Beach Evolution Analysis
2.5. Application of an Object-Based CMA Method for Beach Evolution Analysis Based on High-Resolution Beach Models
3. Results
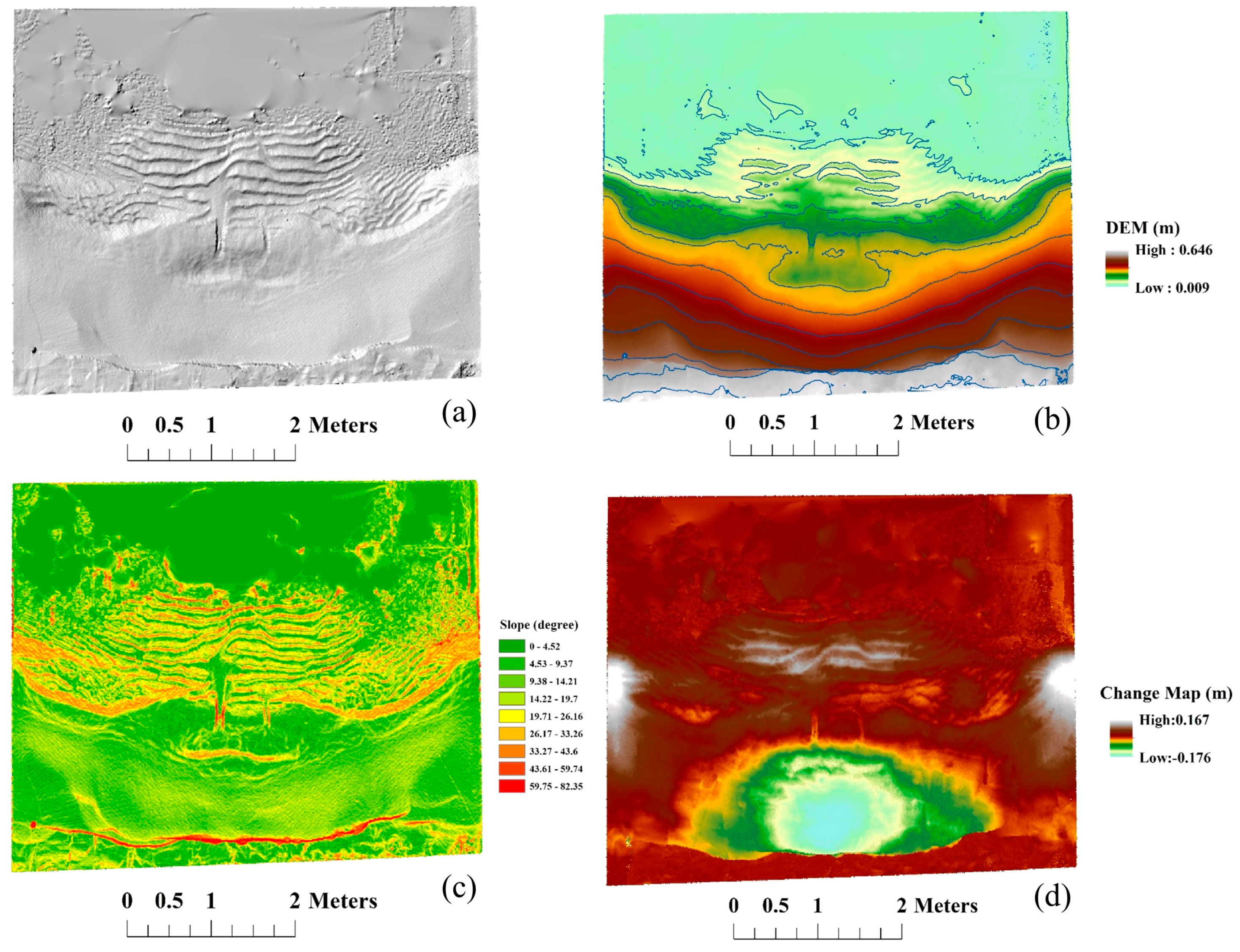
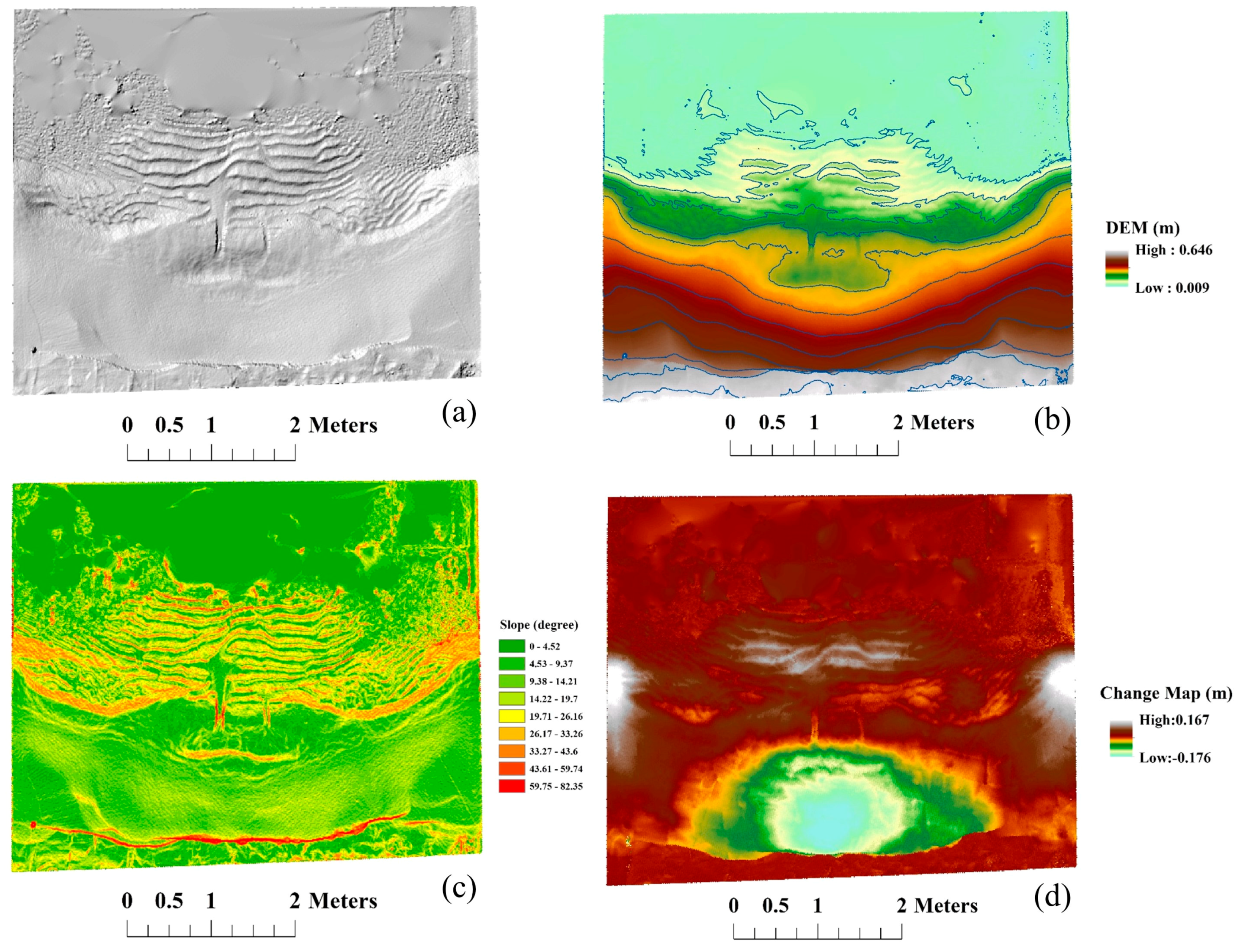
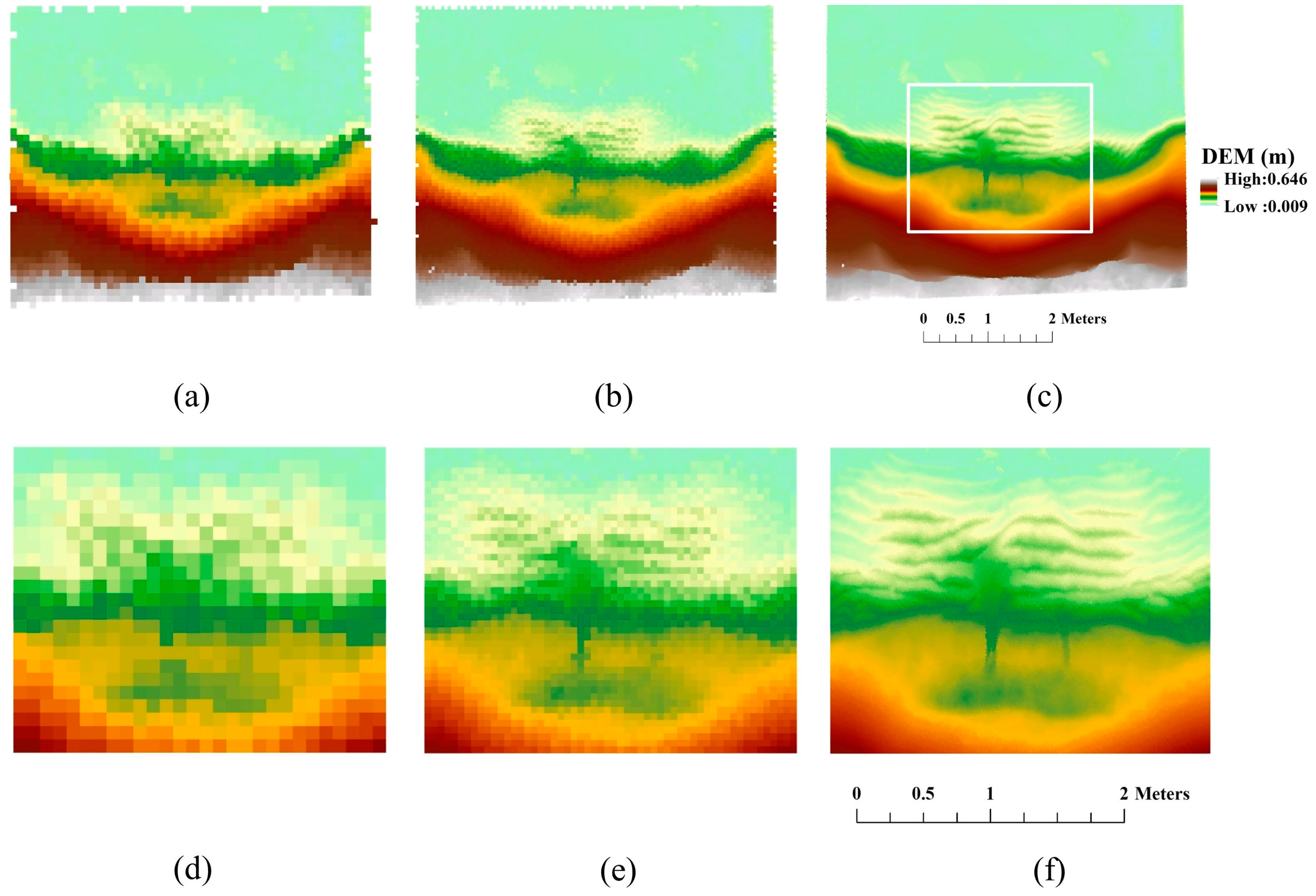
3.1. High-Resolution Laboratory Beach Topographic Mapping Based on Terrestrial LiDAR
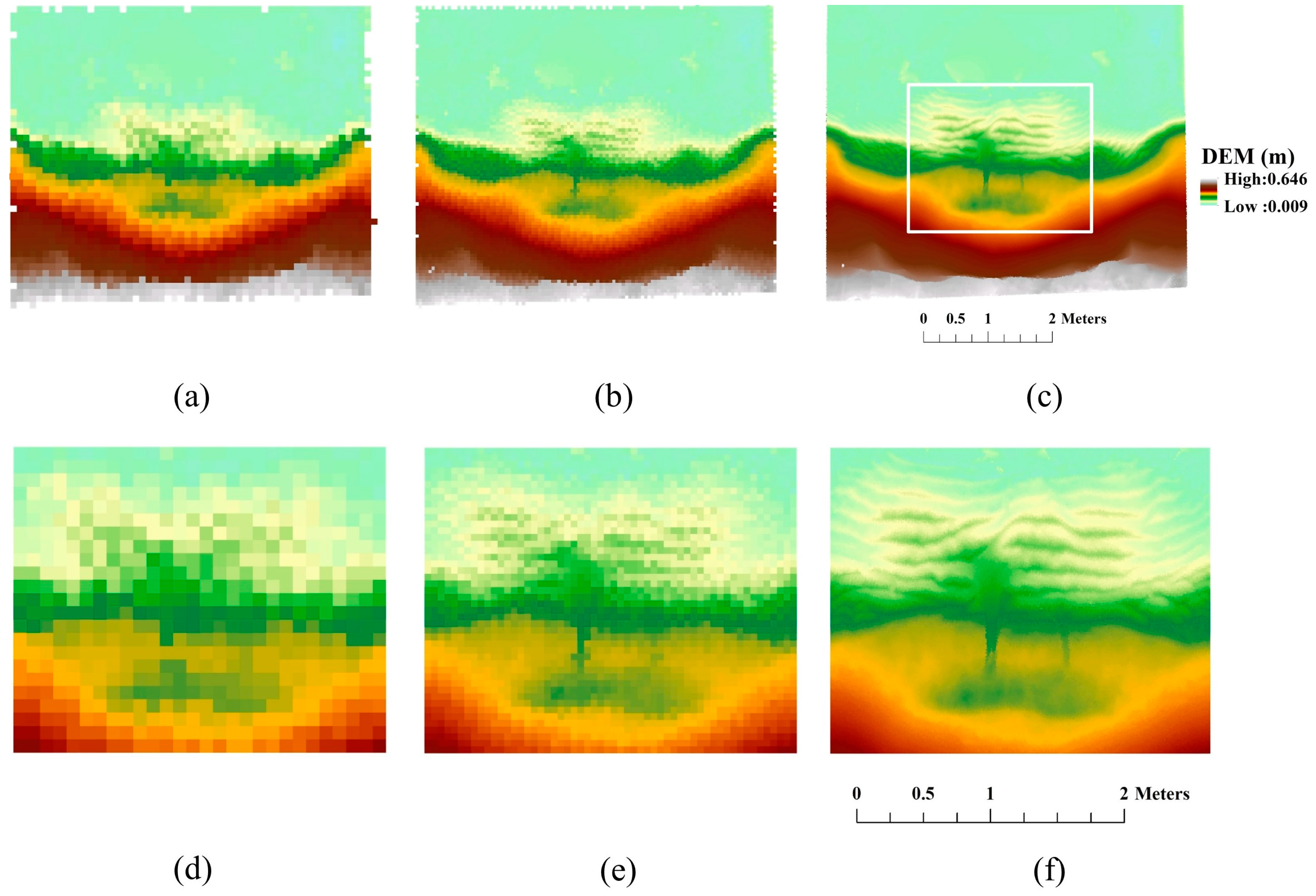
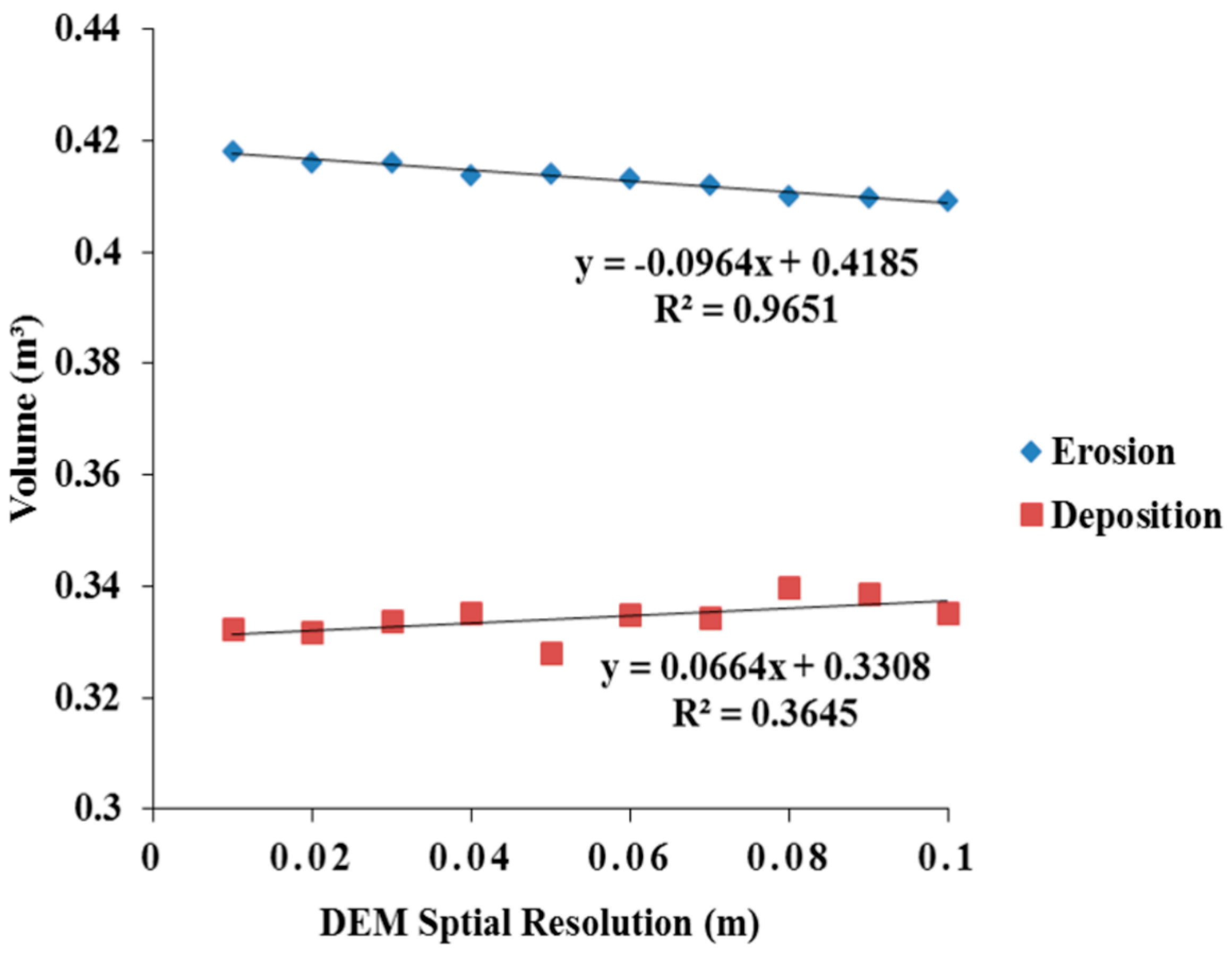
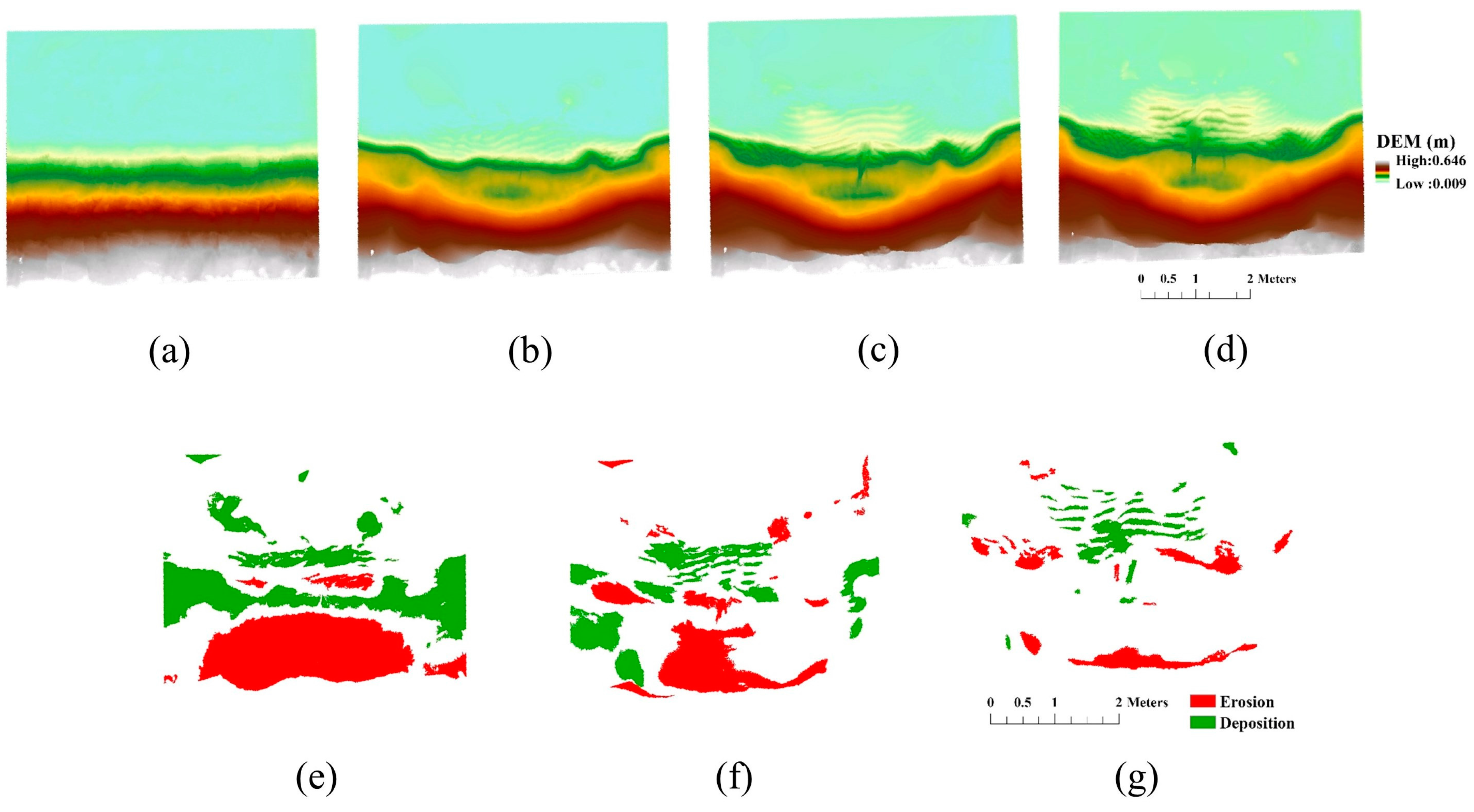
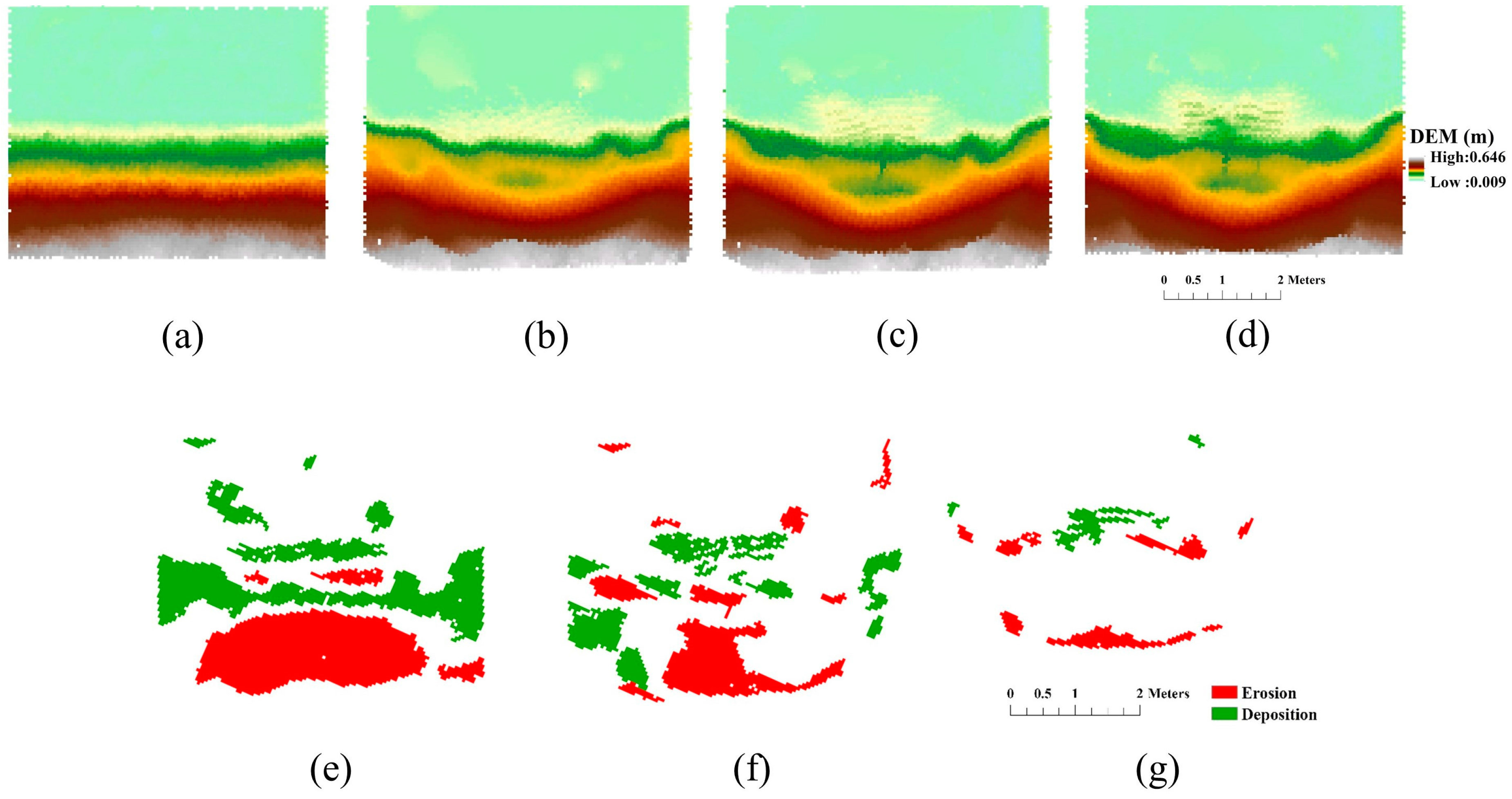
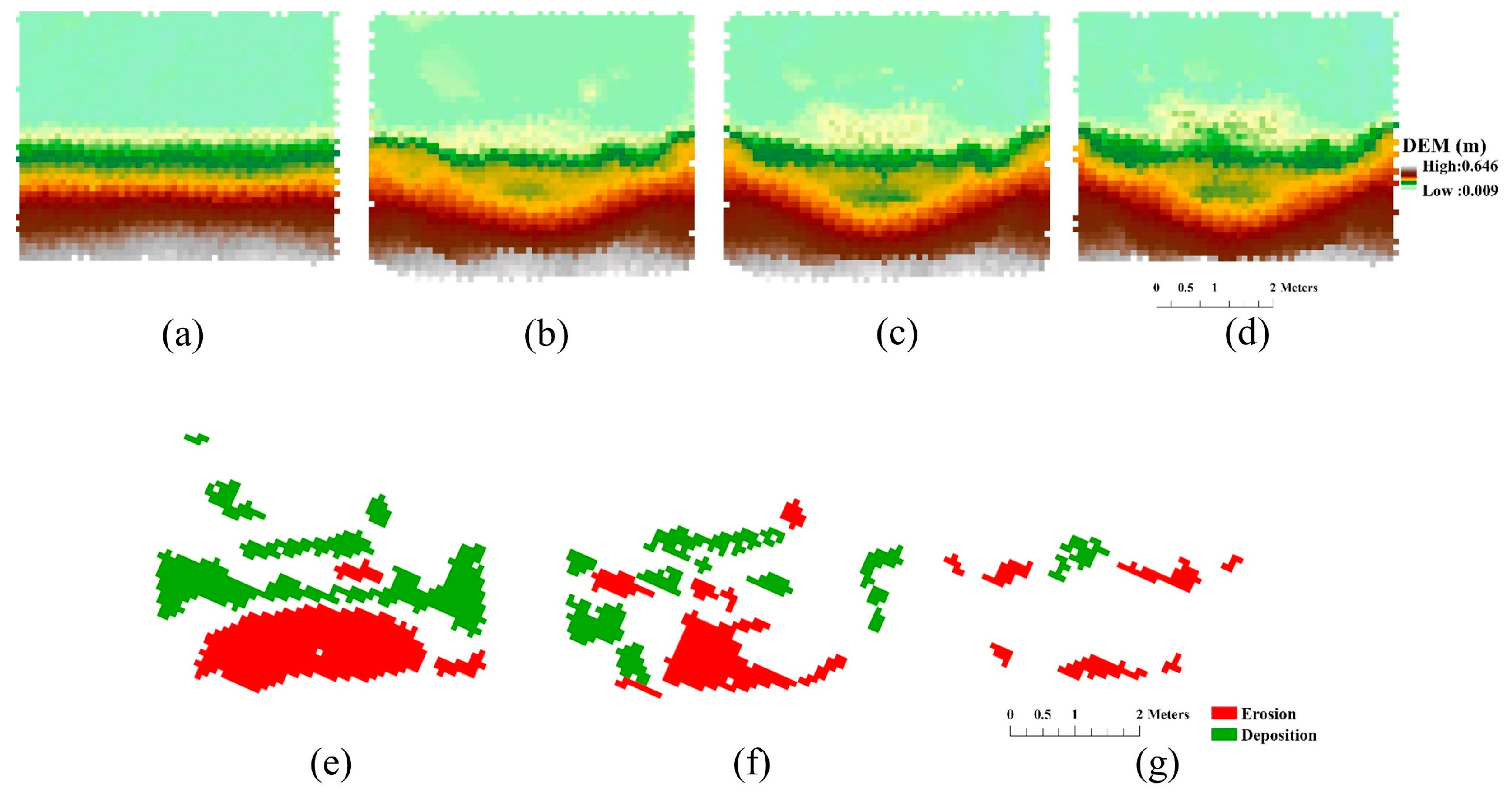
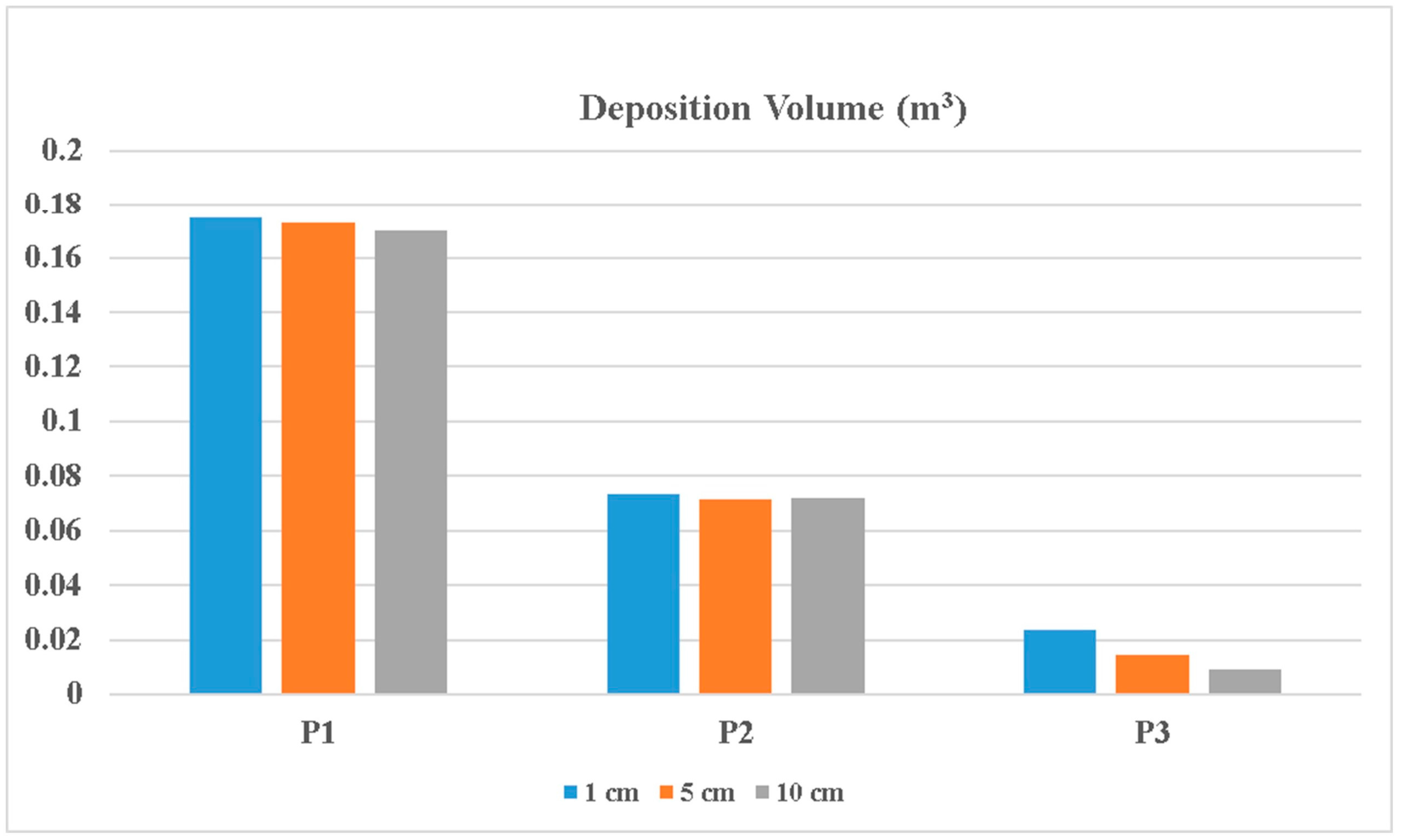
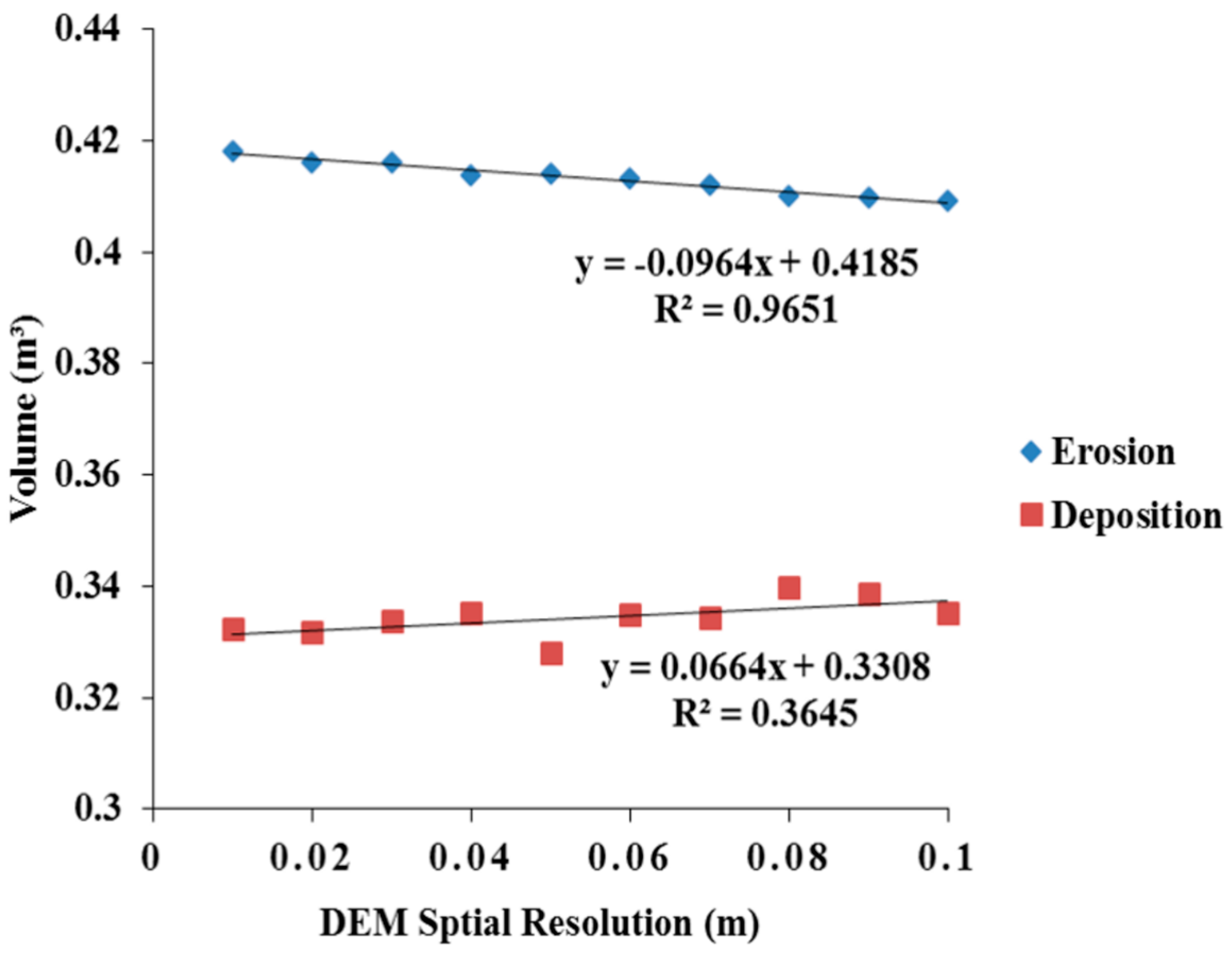
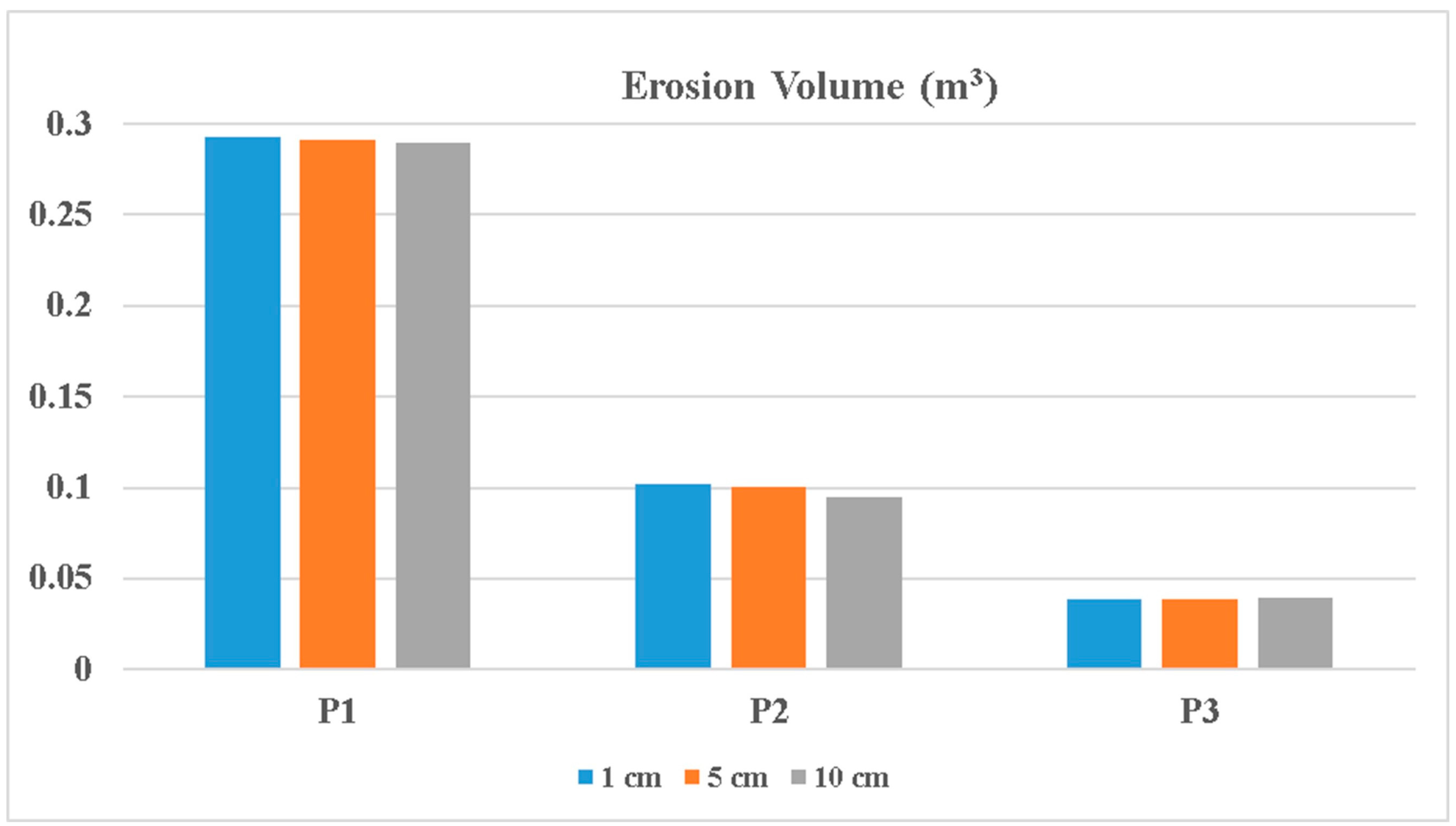
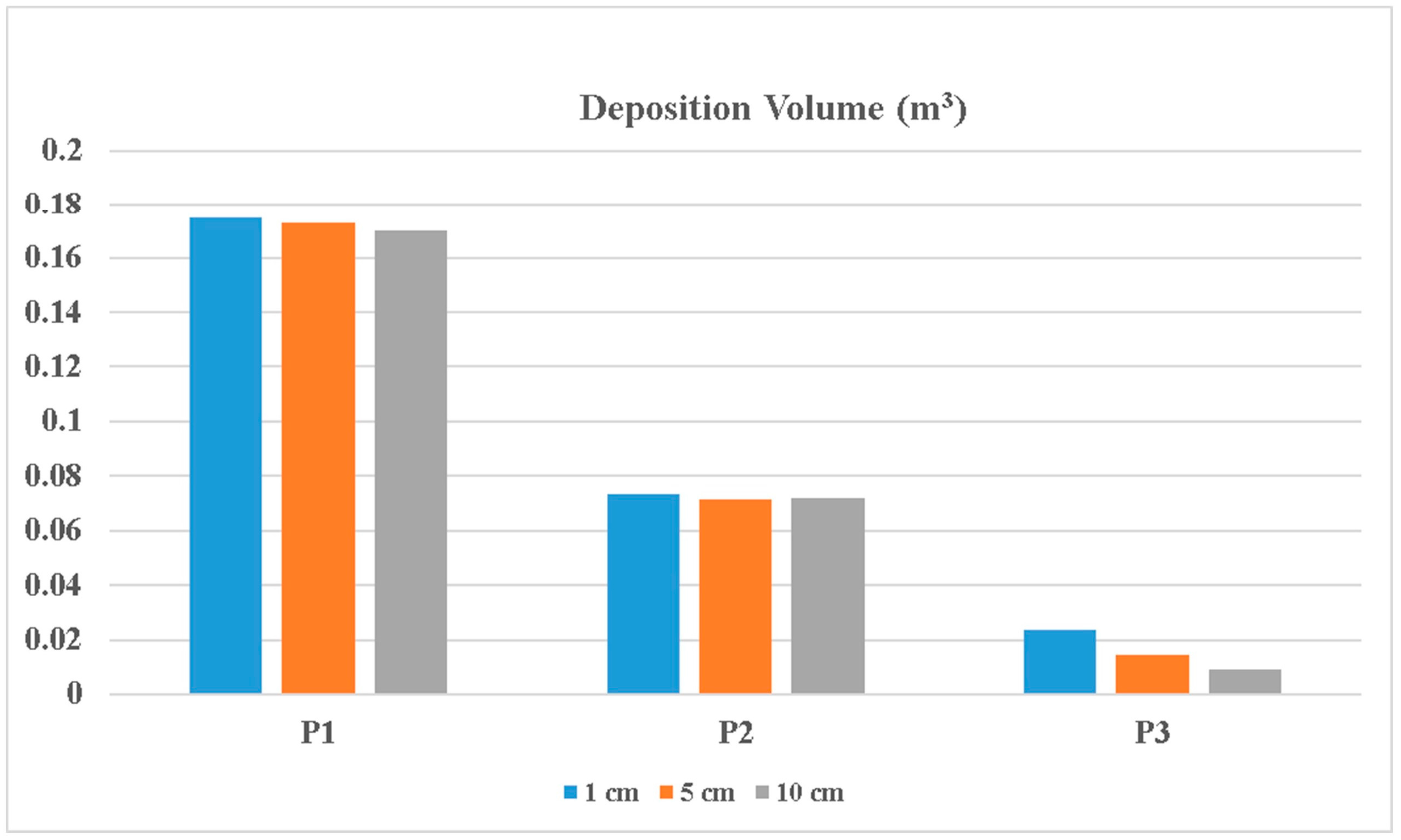
3.2. Impact of Resolution on Volume Change Assessment
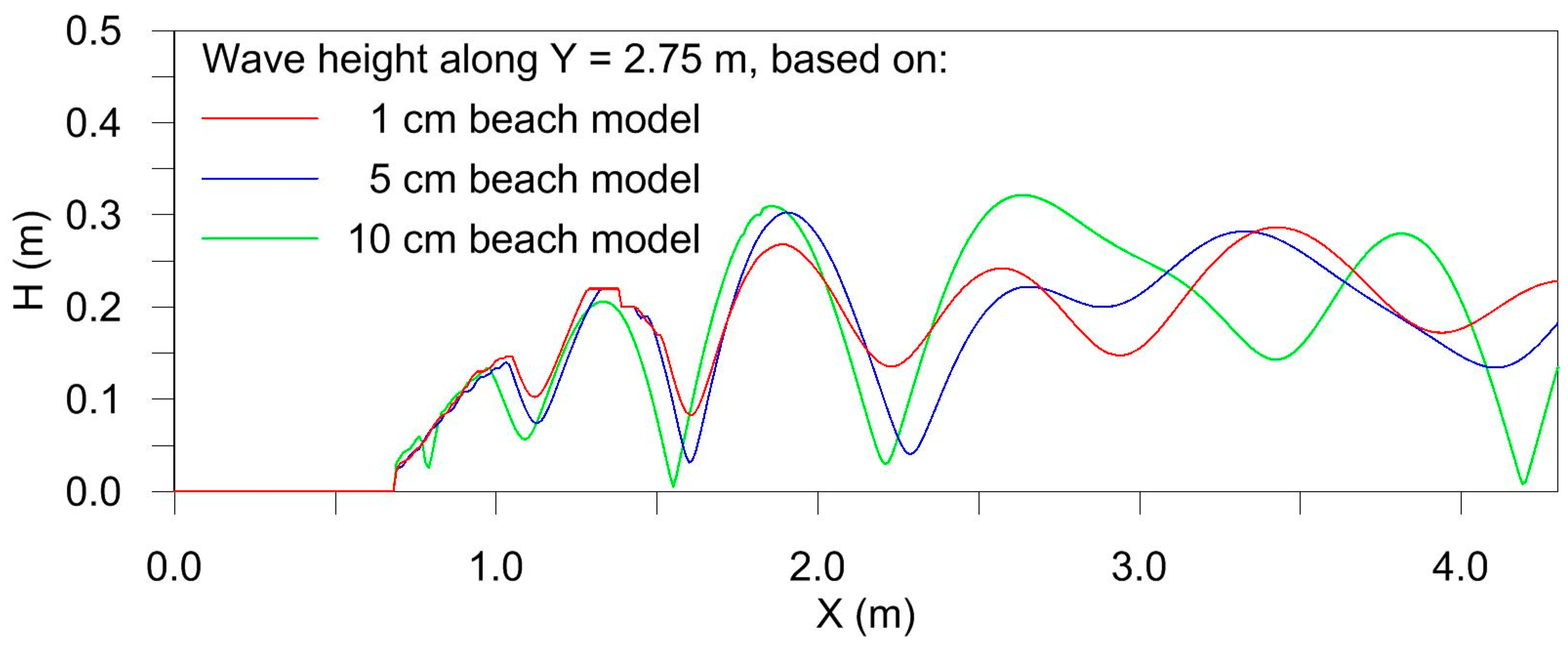
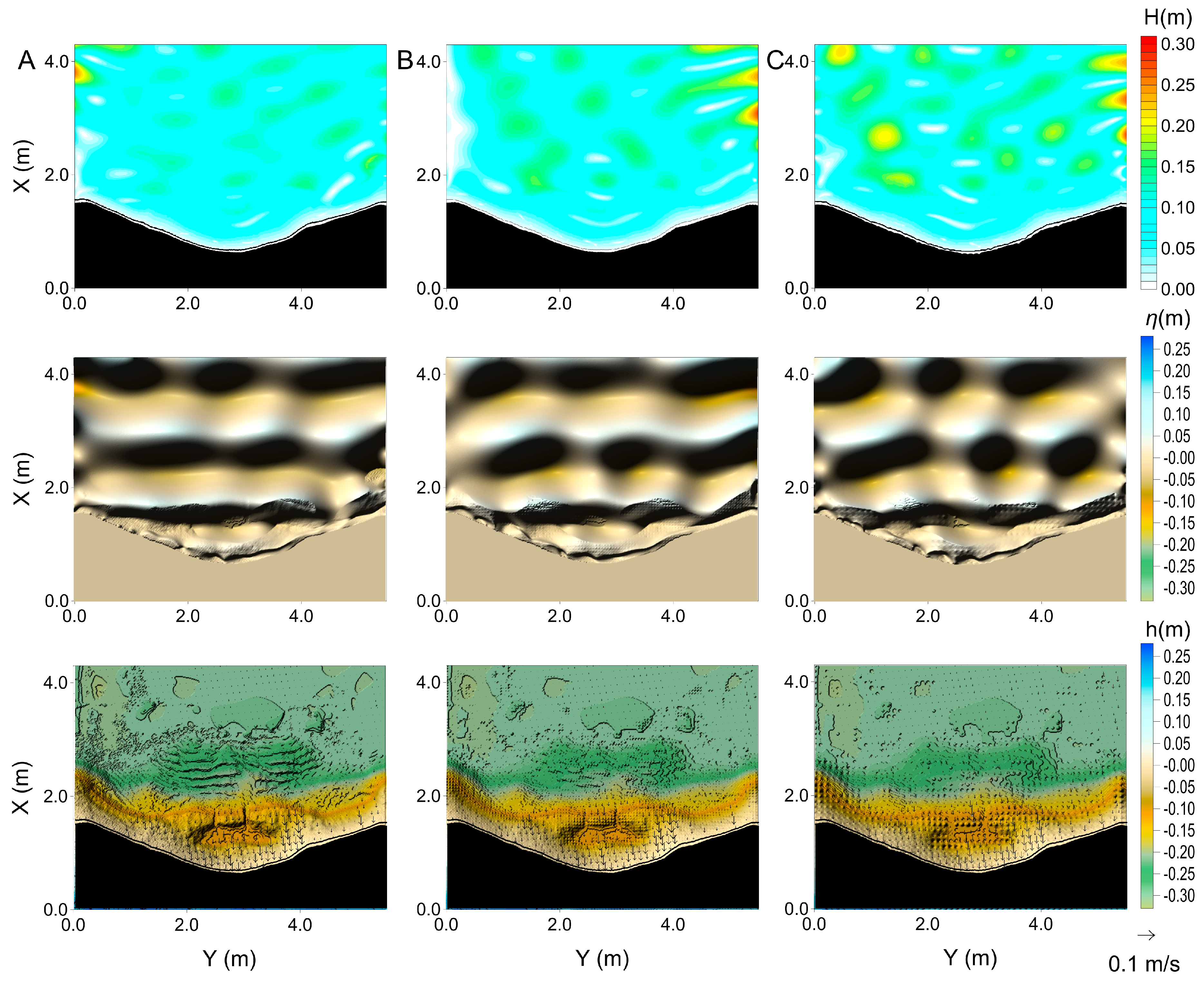
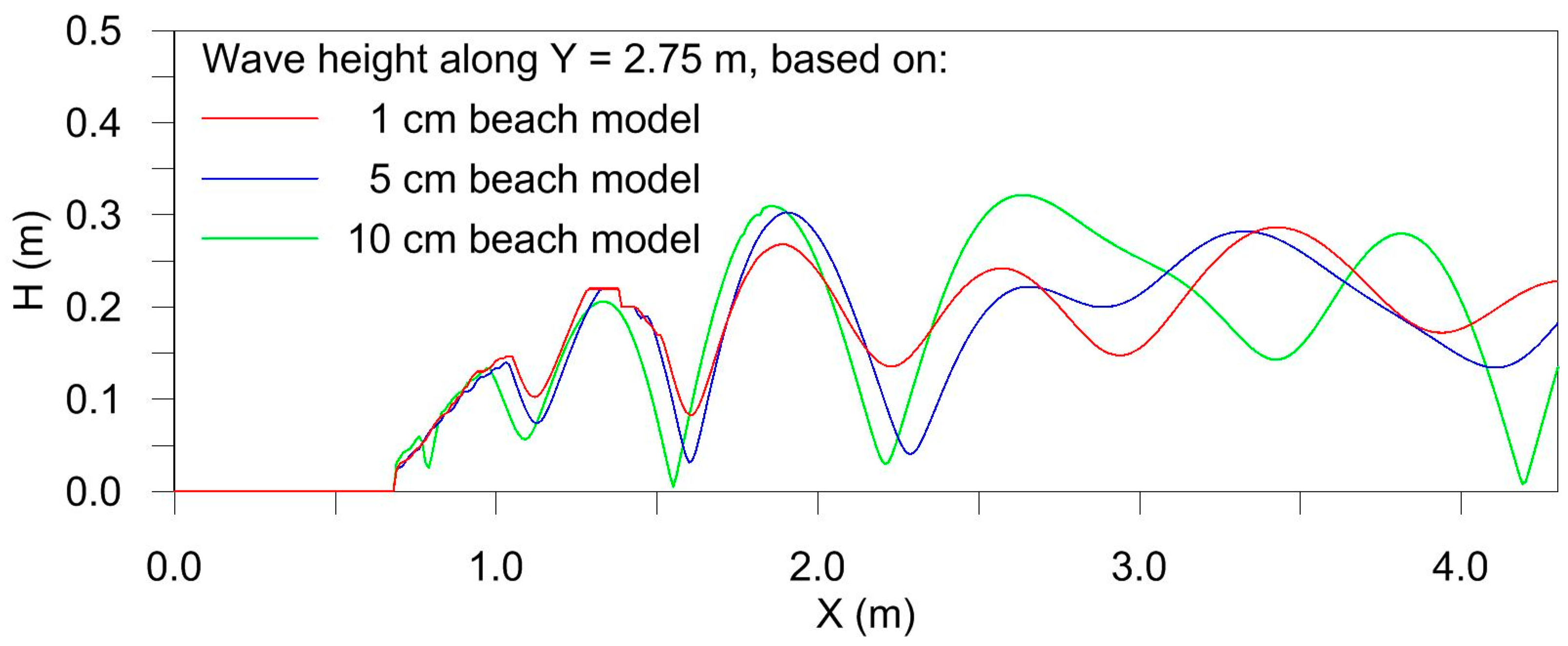
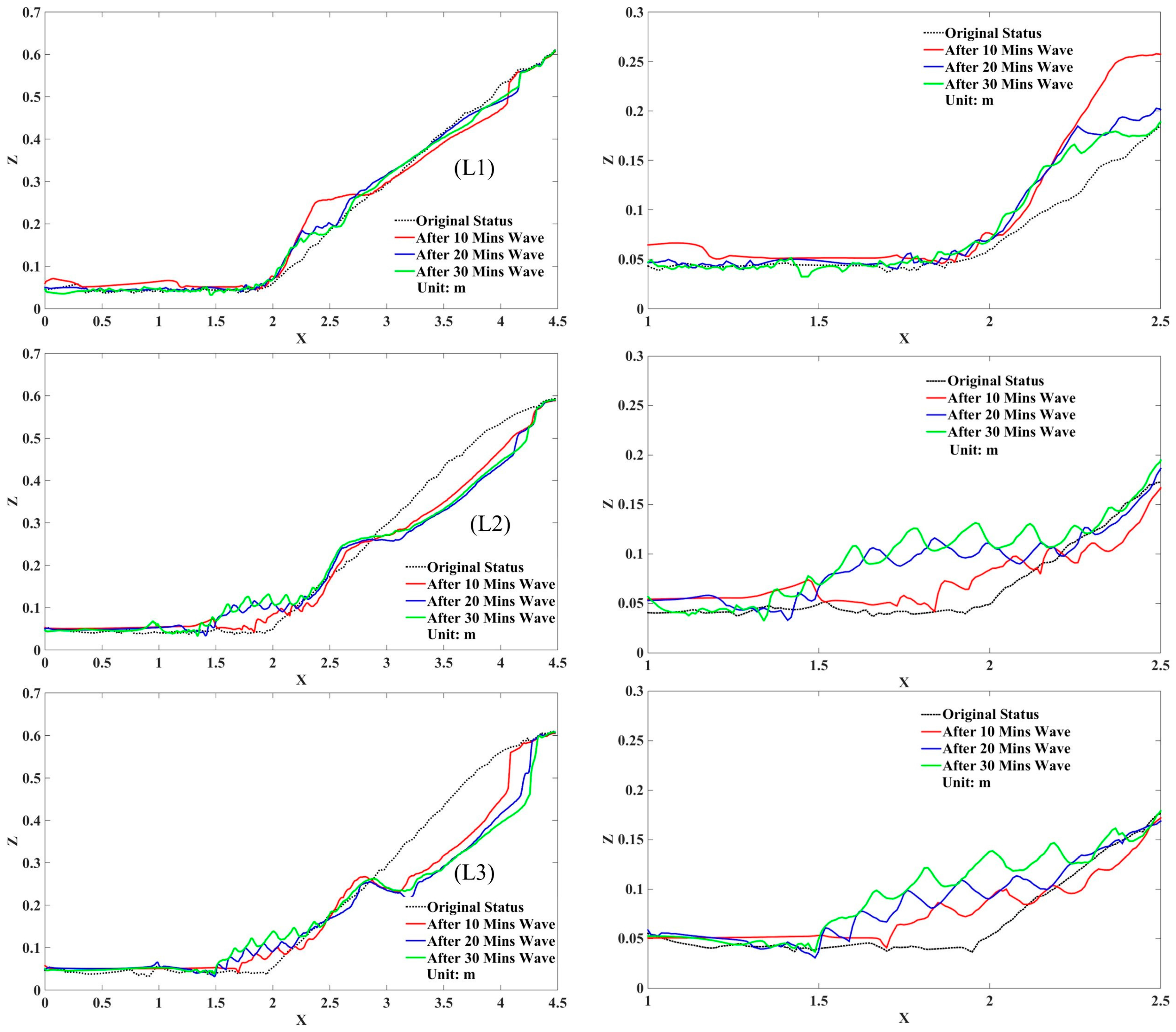
3.3. Wave Modeling Based on High-Resolution Topographic Models
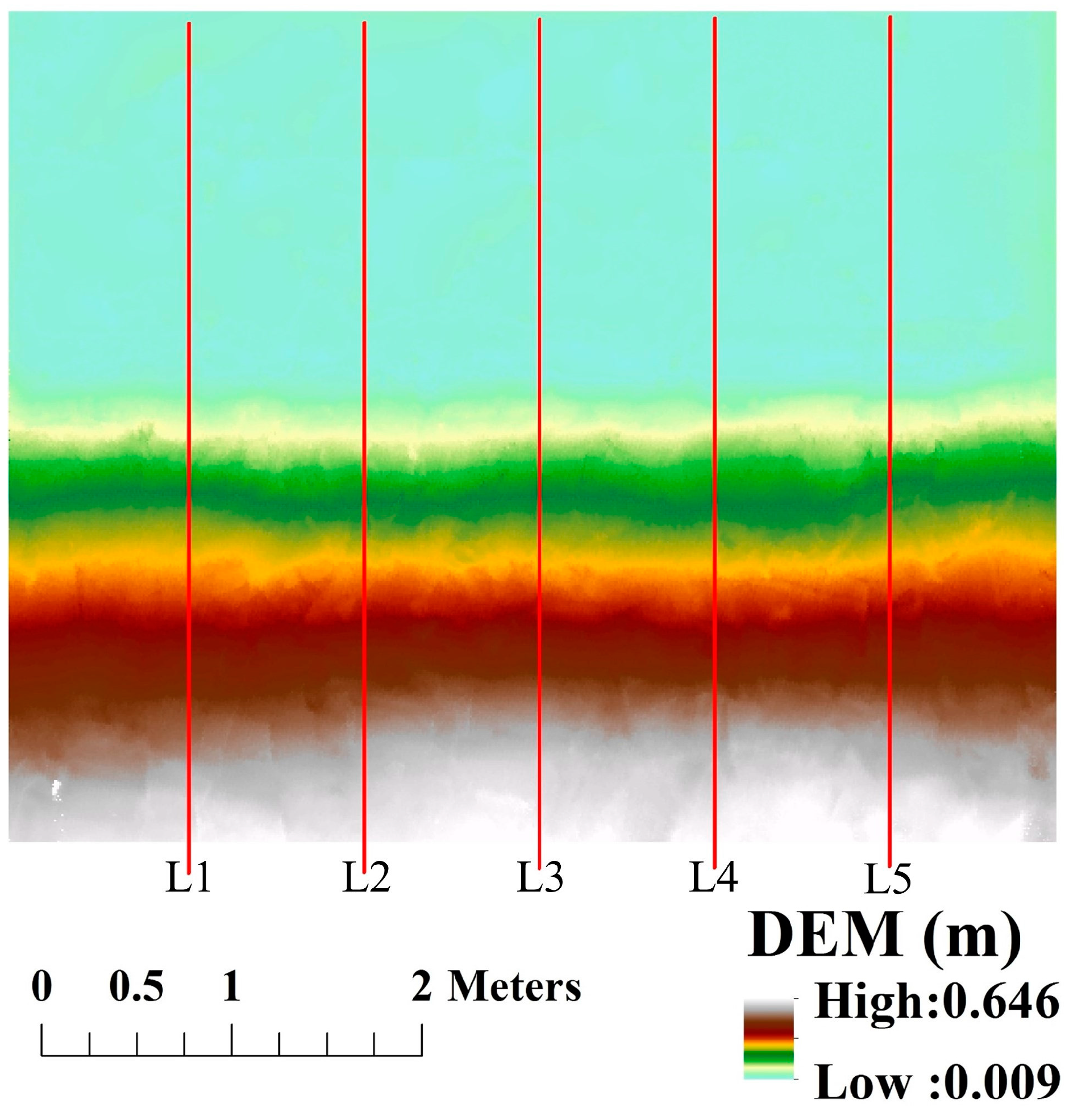
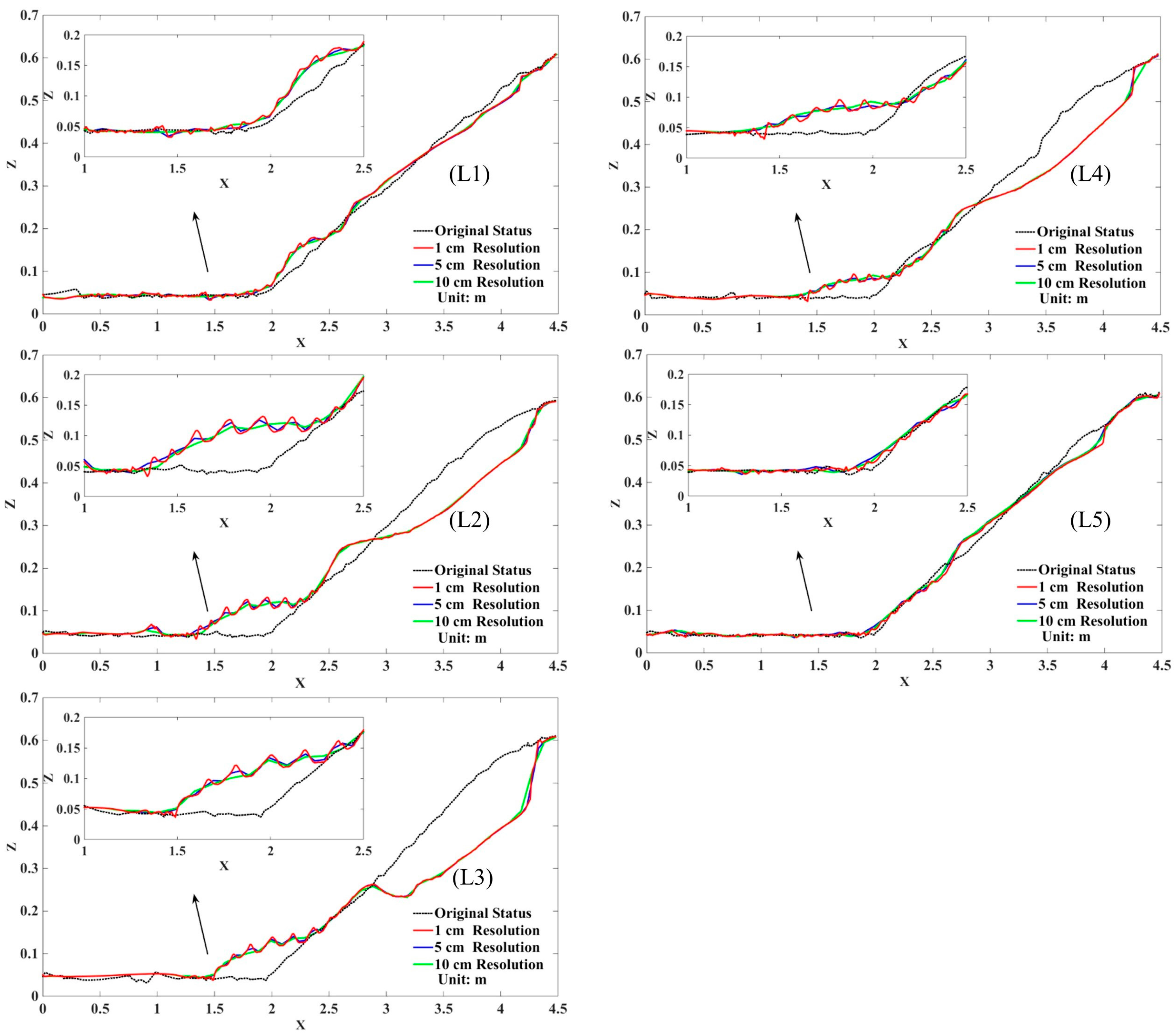
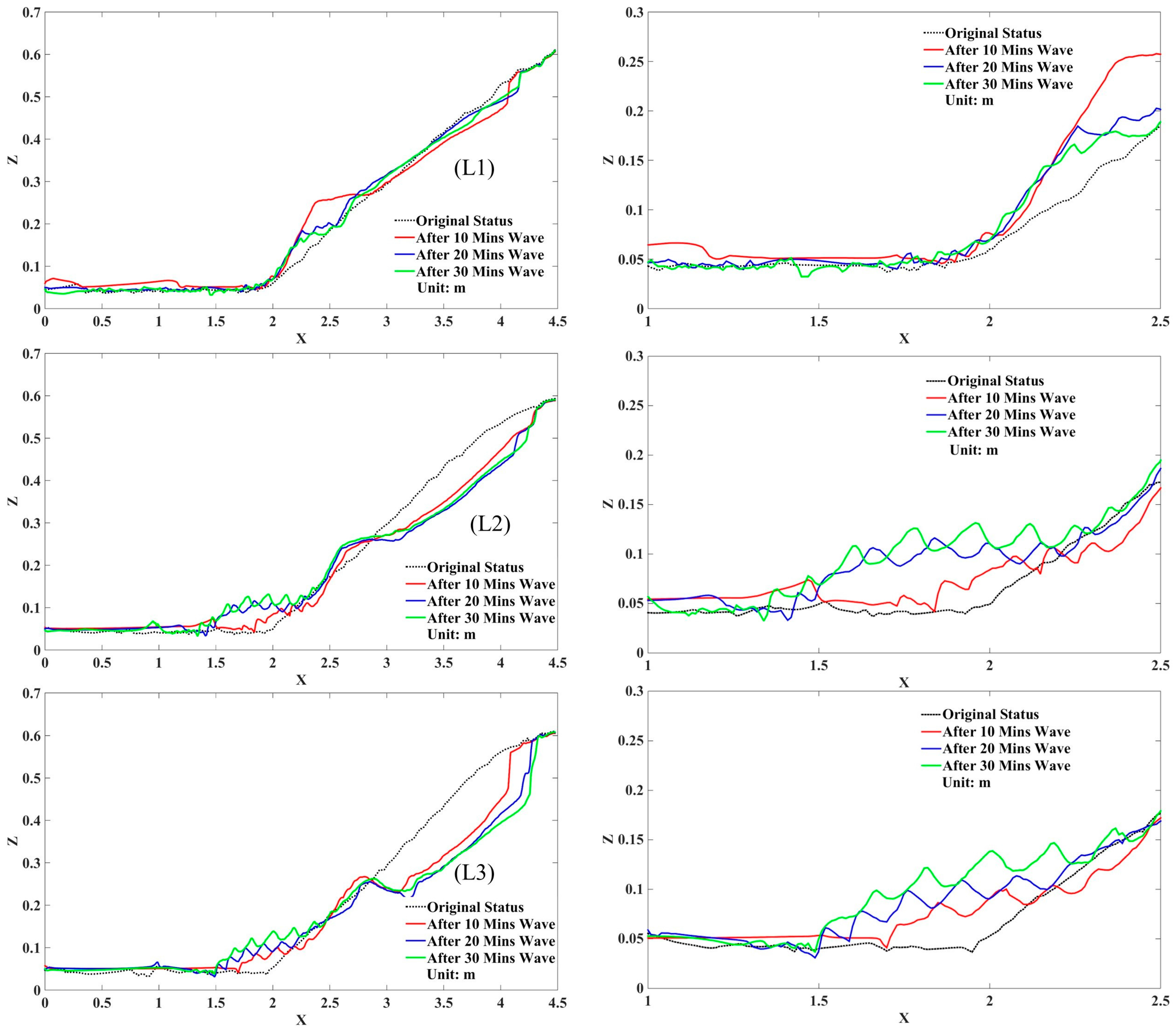
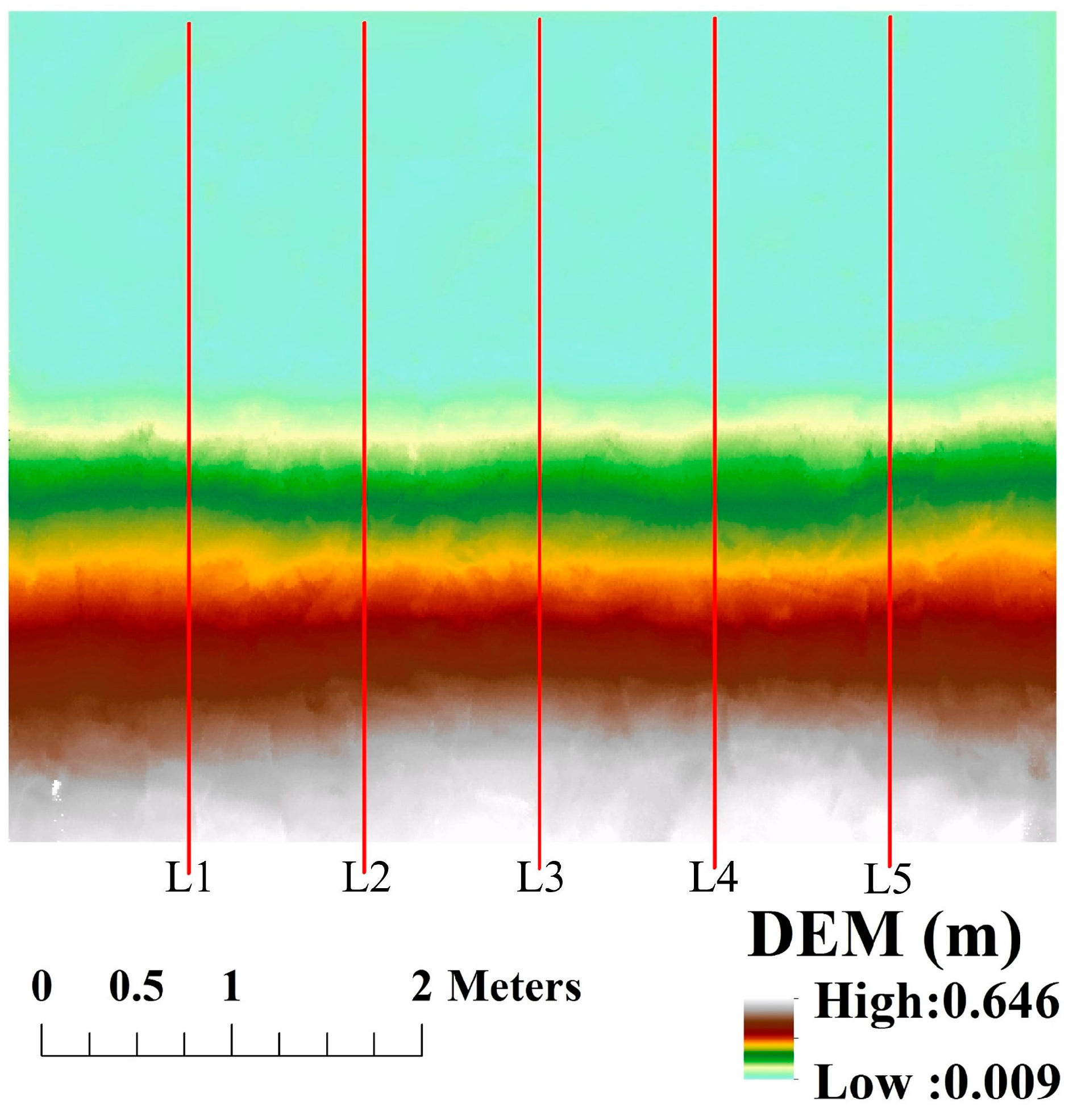
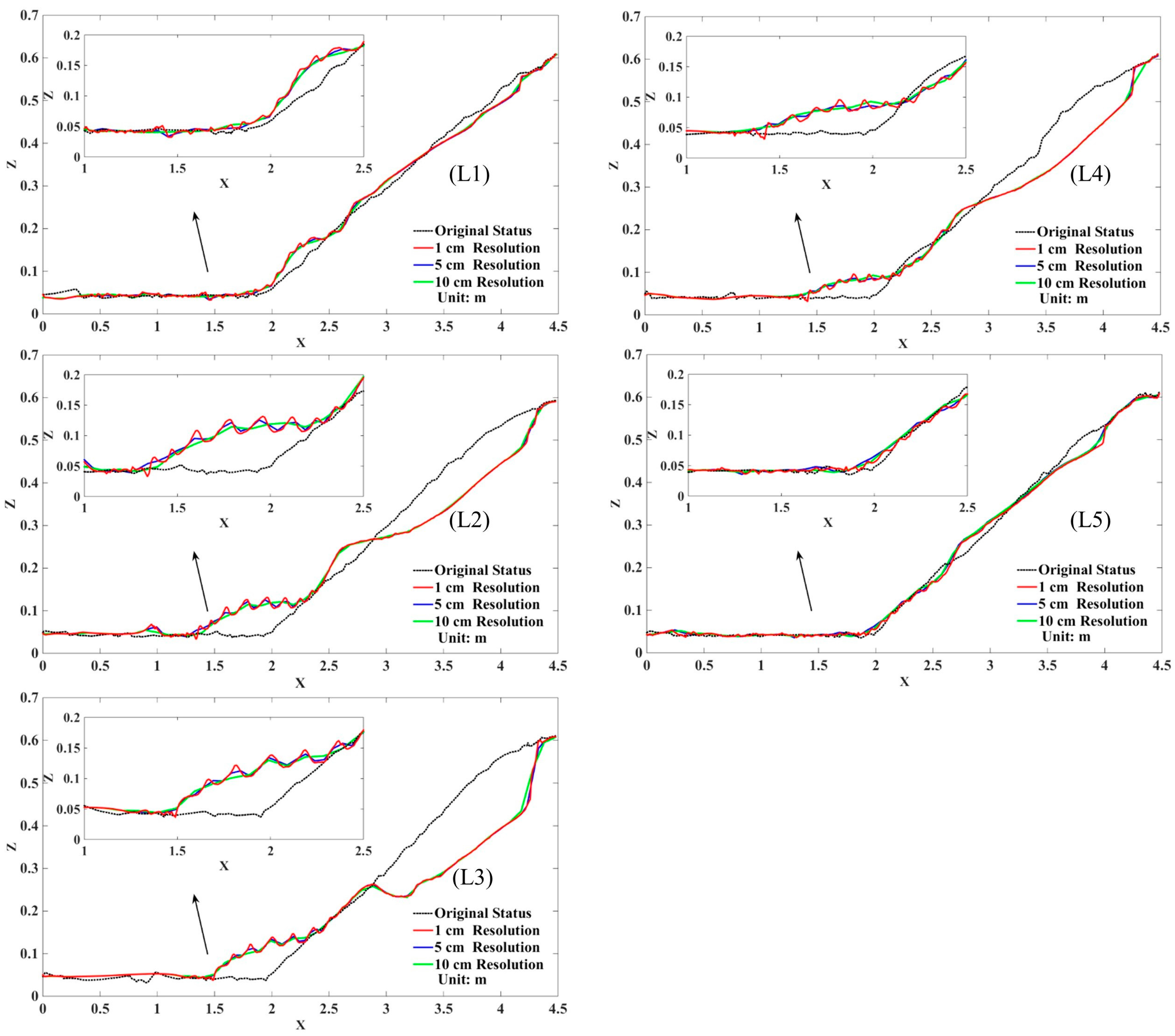
3.4. Assessment of Resolution Impact on Beach Profile Based on Sediment Change Analysis
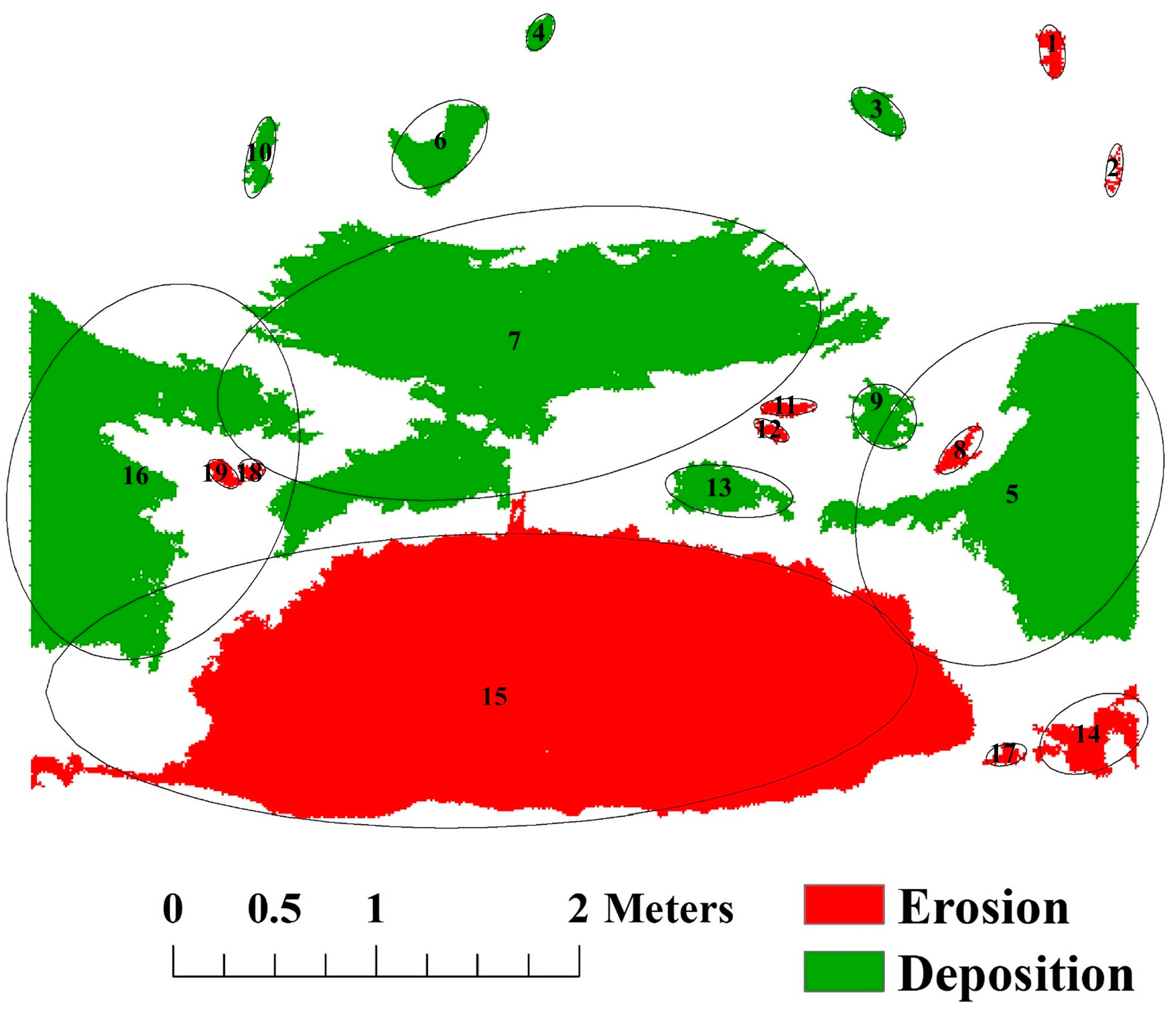
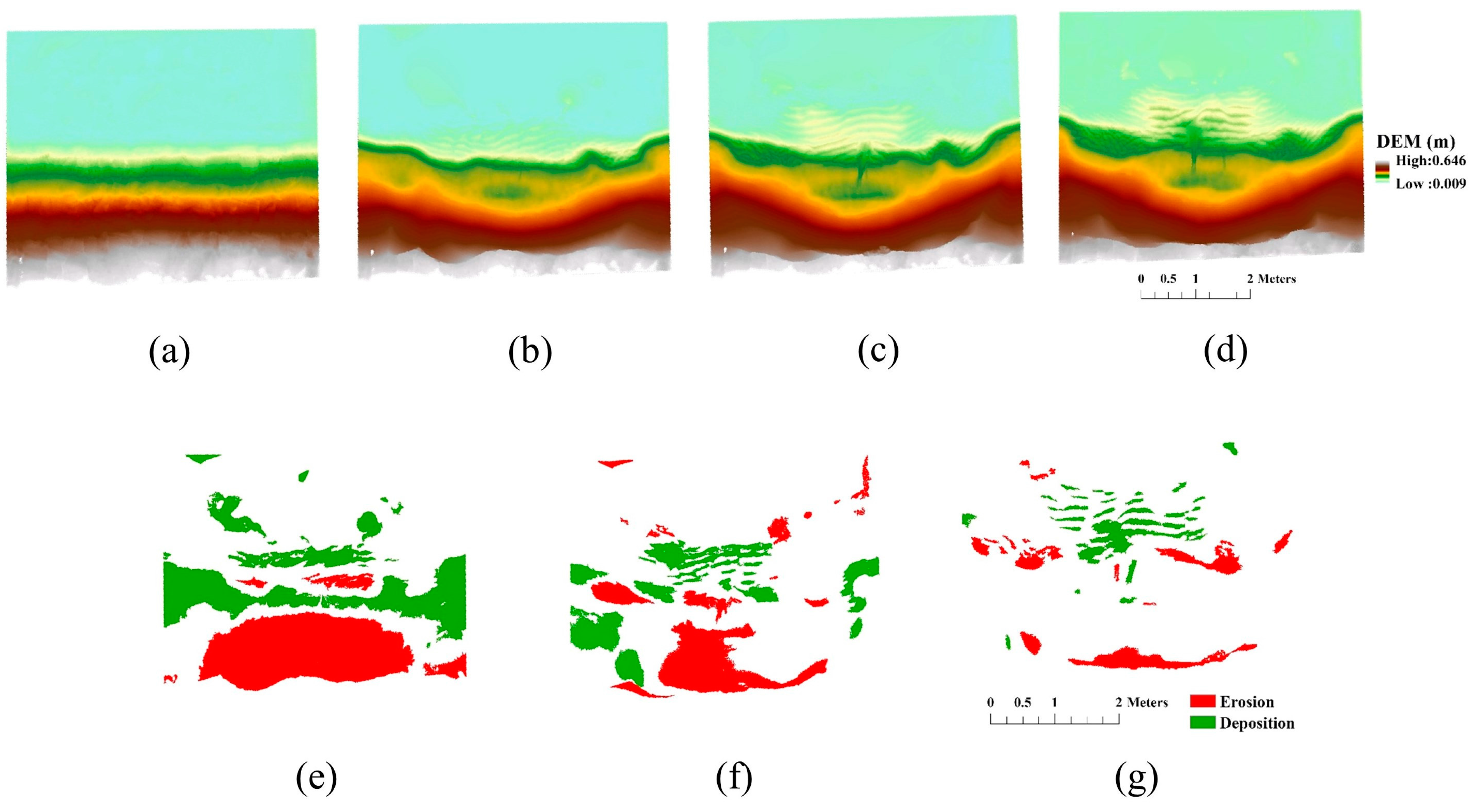
3.5. CMA Analysis for Sediment Change and Beach Evolution Assessment
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Coleman, J.M.; Roberts, H.H.; Stone, G.W. Mississippi river delta: An overview. J. Coast. Res. 1998, 14, 698–716. [Google Scholar]
- Morton, R.A.; Bernier, J.C.; Barras, J.A. Evidence of regional subsidence and associated interior wetland loss induced by hydrocarbon production, gulf coast region, USA. Environ. Geol. 2006, 50, 261–274. [Google Scholar] [CrossRef]
- Kulawardhana, R.W.; Feagin, R.A.; Popescu, S.C.; Boutton, T.W.; Yeager, K.M.; Bianchi, T.S. The role of elevation, relative sea-level history and vegetation transition in determining carbon distribution in spartina alterniflora dominated salt marshes. Estuar. Coast. Shelf Sci. 2015, 154, 48–57. [Google Scholar] [CrossRef]
- Kulawardhana, R.W.; Popescu, S.C.; Feagin, R.A. Fusion of lidar and multispectral data to quantify salt marsh carbon stocks. Remote Sens. Environ. 2014, 154, 345–357. [Google Scholar] [CrossRef]
- Zhang, C.; Xie, Z. Data fusion and classifier ensemble techniques for vegetation mapping in the coastal everglades. Geocarto Int. 2013, 29, 228–243. [Google Scholar] [CrossRef]
- Coops, H.; Geilen, N.; Verheij, H.J.; Boeters, R.; van der Velde, G. Interactions between waves, bank erosion and emergent vegetation: An experimental study in a wave tank. Aquat. Bot. 1996, 53, 187–198. [Google Scholar] [CrossRef]
- Yuan, R.; Wu, X.; Luo, T.; Liu, H.; Sun, J. A review of water tank modeling of the convective atmospheric boundary layer. J. Wind Eng. Ind. Aerodyn. 2011, 99, 1099–1114. [Google Scholar] [CrossRef]
- Masselink, G.; Pattiaratchi, C.B. Seasonal changes in beach morphology along the sheltered coastline of perth, western australia. Mar. Geol. 2001, 172, 243–263. [Google Scholar] [CrossRef]
- Palmsten, M.L.; Holman, R.A. Laboratory investigation of dune erosion using stereo video. Coast. Eng. 2012, 60, 123–135. [Google Scholar] [CrossRef]
- Erikson, L.H.; Hanson, H. A method to extract wave tank data using video imagery and its comparison to conventional data collection techniques. Comput. Geosci. 2005, 31, 371–384. [Google Scholar] [CrossRef]
- Lippman, T.C.; Holman, R.A. Quantification of sand bar morphology: A video technique based on wave dissipation. J. Geophys. Res. 1989, 94, 17. [Google Scholar] [CrossRef]
- Lippmann, T.C.; Holman, R.A. The spatial and temporal variability of sand bar morphology. J. Geophys. Res.: Oceans 1990, 95, 11575–11590. [Google Scholar] [CrossRef]
- Holman, R.A.; Sallenger, J.; Asbury, H.; Lippmann, T.C.; Haines, J.W. The application of video image processing to the study of nearshore processes. Oceanography 1993, 6, 8. [Google Scholar] [CrossRef]
- Astruc, D.; Cazin, S.; Cid, E.; Eiff, O.; Lacaze, L.; Robin, P.; Toublanc, F.; Cáceres, I. A stereoscopic method for rapid monitoring of the spatio-temporal evolution of the sand-bed elevation in the swash zone. Coast. Eng. 2012, 60, 11–20. [Google Scholar] [CrossRef]
- Foote, M.; Horn, D. Video measurement of swash zone hydrodynamics. Geomorphology 1999, 29, 59–76. [Google Scholar] [CrossRef]
- Holland, K.T.; Puleo, J.A.; Kooney, T.N. Quantification of swash flows using video-based particle image velocimetry. Coast. Eng. 2001, 44, 65–77. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (uav) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Zhao, K.; García, M.; Liu, S.; Guo, Q.; Chen, G.; Zhang, X.; Zhou, Y.; Meng, X. Terrestrial lidar remote sensing of forests: Maximum likelihood estimates of canopy profile, leaf area index, and leaf angle distribution. Agric. For. Meteorol. 2015, 209–210, 100–113. [Google Scholar] [CrossRef]
- Meng, X.L.; Wang, L.; Silvan-Cardenas, J.L.; Currit, N. A multi-directional ground filtering algorithm for airborne LIDAR. ISPRS J. Photogramm. Remote Sens. 2009, 64, 117–124. [Google Scholar] [CrossRef]
- Meng, X.L.; Wang, L.; Currit, N. Morphology-based building detection from airborne LIDAR data. Photogramm. Eng. Remote Sens. 2009, 75, 437–442. [Google Scholar] [CrossRef]
- Meng, X.L.; Currit, N.; Zhao, K.G. Ground filtering algorithms for airborne LIDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef]
- Fairley, I.; Thomas, T.; Phillips, M.; Reeve, D. Terrestrial laser scanner techniques for enhancement in understanding of coastal environments. In Seafloor Mapping Along Continental Shelves: Research and Techniques for Visualizing Benthic Environments; Finkl, C.W., Makowski, C., Eds.; Springer International Publishing: New York, NY, USA, 2016; pp. 273–289. [Google Scholar]
- Siadatmousavi, S.M.; Allahdadi, M.N.; Chen, Q.; Jose, F.; Roberts, H.H. Simulation of wave damping during a cold front over the muddy atchafalaya shelf. Cont. Shelf Res. 2012, 47, 165–177. [Google Scholar] [CrossRef]
- Silva, R.; Baquerizo, A.; Losada, M.Á.; Mendoza, E. Hydrodynamics of a headland-bay beach—Nearshore current circulation. Coast. Eng. 2010, 57, 160–175. [Google Scholar] [CrossRef]
- Silva, R.; Borthwick, A.G.L.; Taylor, R.E. Numerical implementation of the harmonic modified mild-slope equation. Coast. Eng. 2005, 52, 391–407. [Google Scholar] [CrossRef]
- Ku, N.W.; Popescu, S.C.; Ansley, R.J.; Perotto-Baldivieso, H.L.; Filippi, A.M. Assessment of available rangeland woody plant biomass with a terrestrial LIDAR system. Photogramm. Eng. Remote Sens. 2012, 78, 349–361. [Google Scholar] [CrossRef]
- Klemas, V.V. Coastal and environmental remote sensing from unmanned aerial vehicles: An overview. J. Coast. Res. 2015, 1260–1267. [Google Scholar] [CrossRef]
- Liu, H.; Wang, L.; Sherman, D.; Gao, Y.; Wu, Q. An object-based conceptual framework and computational method for representing and analyzing coastal morphological changes. Int. J. Geogr. Inf. Sci. 2010, 24, 1015–1041. [Google Scholar] [CrossRef]
- Woolard, J.W.; Colby, J.D. Spatial characterization, resolution, and volumetric change of coastal dunes using airborne LIDAR: Cape Hatteras, Horth Carolina. Geomorphology 2002, 48, 269–287. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object ID | Object Type | Location-X (m) | Location-Y (m) | Area (m2) | Volume (m3) |
|---|---|---|---|---|---|
| 15 | Erosion | 3.5 | 4.61 | 4.3522 | 0.393447 |
| 14 | Erosion | 6.36 | 3.62 | 0.0964 | 0.002408 |
| 1 | Erosion | 4.8 | 0.63 | 0.0214 | 0.000513 |
| 8 | Erosion | 5.19 | 2.61 | 0.0207 | 0.000495 |
| 11 | Erosion | 4.33 | 2.76 | 0.0142 | 0.000337 |
| 19 | Erosion | 1.92 | 4.2 | 0.0132 | 0.000334 |
| 17 | Erosion | 6.01 | 3.89 | 0.0111 | 0.000262 |
| 12 | Erosion | 4.3 | 2.9 | 0.0095 | 0.000224 |
| 18 | Erosion | 2.04 | 4.12 | 0.0076 | 0.000185 |
| 2 | Erosion | 5.32 | 1.04 | 0.0063 | 0.000137 |
| 7 | Deposition | 3.01 | 3.06 | 2.2086 | 0.09923 |
| 5 | Deposition | 5.5 | 2.71 | 1.1516 | 0.066502 |
| 16 | Deposition | 1.6 | 4.33 | 1.1699 | 0.057753 |
| 13 | Deposition | 4.23 | 3.26 | 0.099 | 0.002804 |
| 6 | Deposition | 2.23 | 2.28 | 0.1084 | 0.002502 |
| 9 | Deposition | 4.78 | 2.61 | 0.0674 | 0.001759 |
| 3 | Deposition | 4.14 | 1.25 | 0.0362 | 0.000977 |
| 10 | Deposition | 1.45 | 2.7 | 0.032 | 0.000846 |
| 4 | Deposition | 2.46 | 1.57 | 0.0173 | 0.000429 |
| Object Type | Object Quantity | Sum of Area (m2) | Minimal Area (m2) | Maximal Area (m2) | Std. Deviation of Area |
|---|---|---|---|---|---|
| Deposition | 9 | 4.8904 | 0.0173 | 2.2086 | 0.7861 |
| Erosion | 10 | 4.5525 | 0.0063 | 4.3522 | 1.3695 |
| Object Type | Object Quantity | Sum of Volume (m3) | Minimal Volume (m3) | Maximal Volume (m3) | Std. Deviation of Volume |
|---|---|---|---|---|---|
| Deposition | 9 | 0.232801 | 0.000429 | 0.09923 | 0.0381 |
| Erosion | 10 | 0.398341 | 0.000137 | 0.393447 | 0.1242 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, X.; Zhang, X.; Silva, R.; Li, C.; Wang, L. Impact of High-Resolution Topographic Mapping on Beach Morphological Analyses Based on Terrestrial LiDAR and Object-Oriented Beach Evolution. ISPRS Int. J. Geo-Inf. 2017, 6, 147. https://doi.org/10.3390/ijgi6050147
Meng X, Zhang X, Silva R, Li C, Wang L. Impact of High-Resolution Topographic Mapping on Beach Morphological Analyses Based on Terrestrial LiDAR and Object-Oriented Beach Evolution. ISPRS International Journal of Geo-Information. 2017; 6(5):147. https://doi.org/10.3390/ijgi6050147
Chicago/Turabian StyleMeng, Xuelian, Xukai Zhang, Rodolfo Silva, Chunyan Li, and Lei Wang. 2017. "Impact of High-Resolution Topographic Mapping on Beach Morphological Analyses Based on Terrestrial LiDAR and Object-Oriented Beach Evolution" ISPRS International Journal of Geo-Information 6, no. 5: 147. https://doi.org/10.3390/ijgi6050147