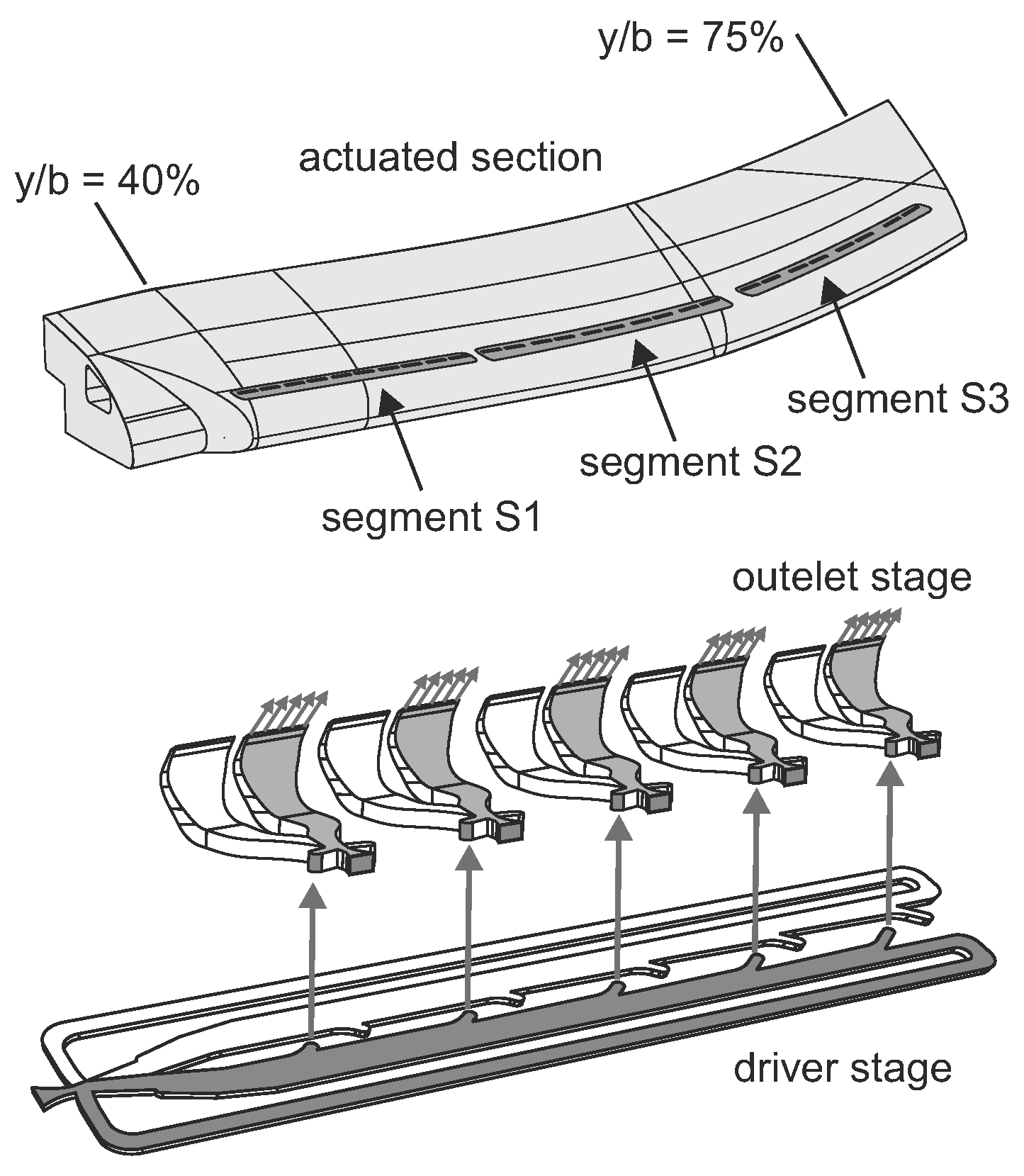
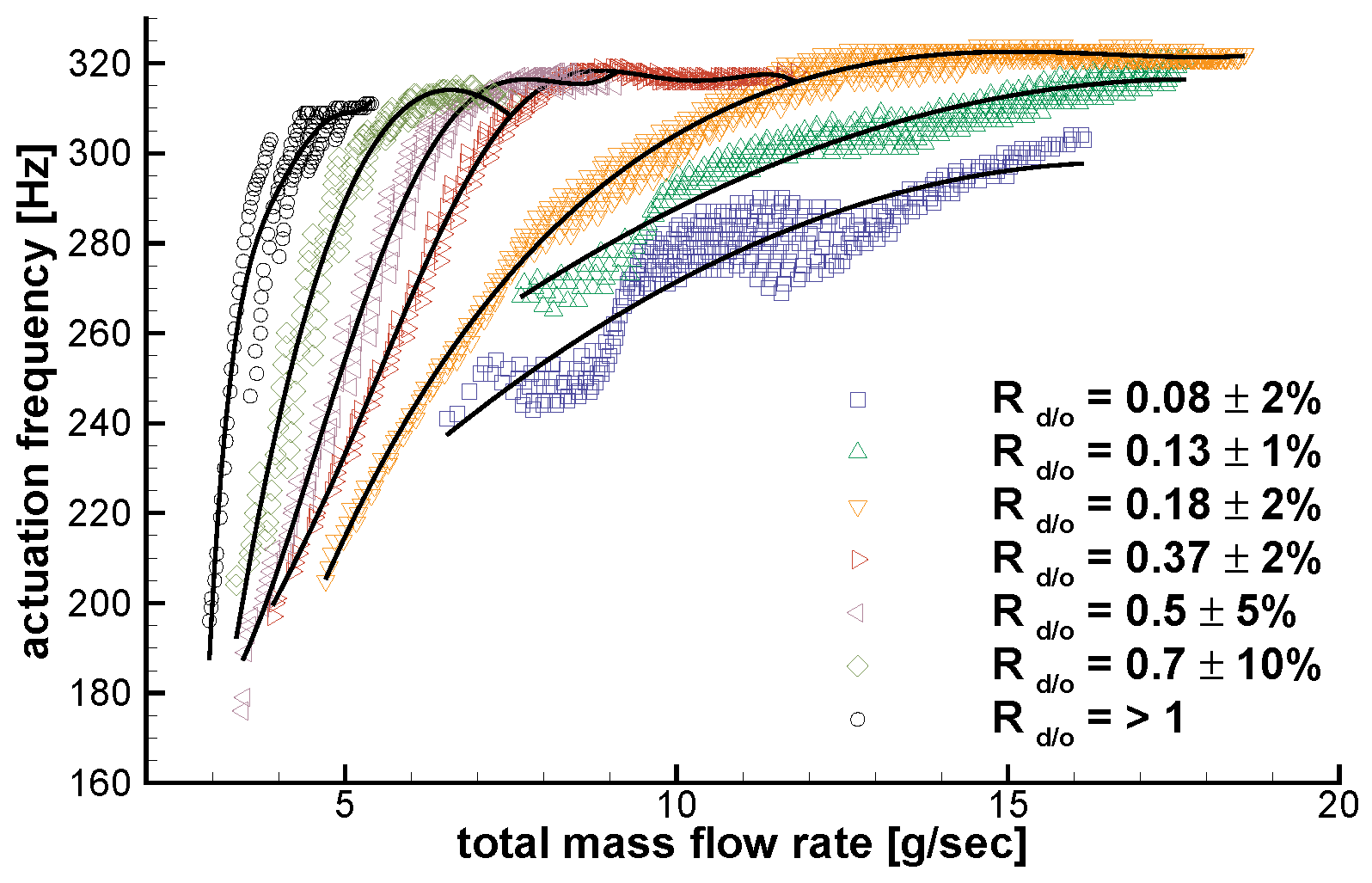
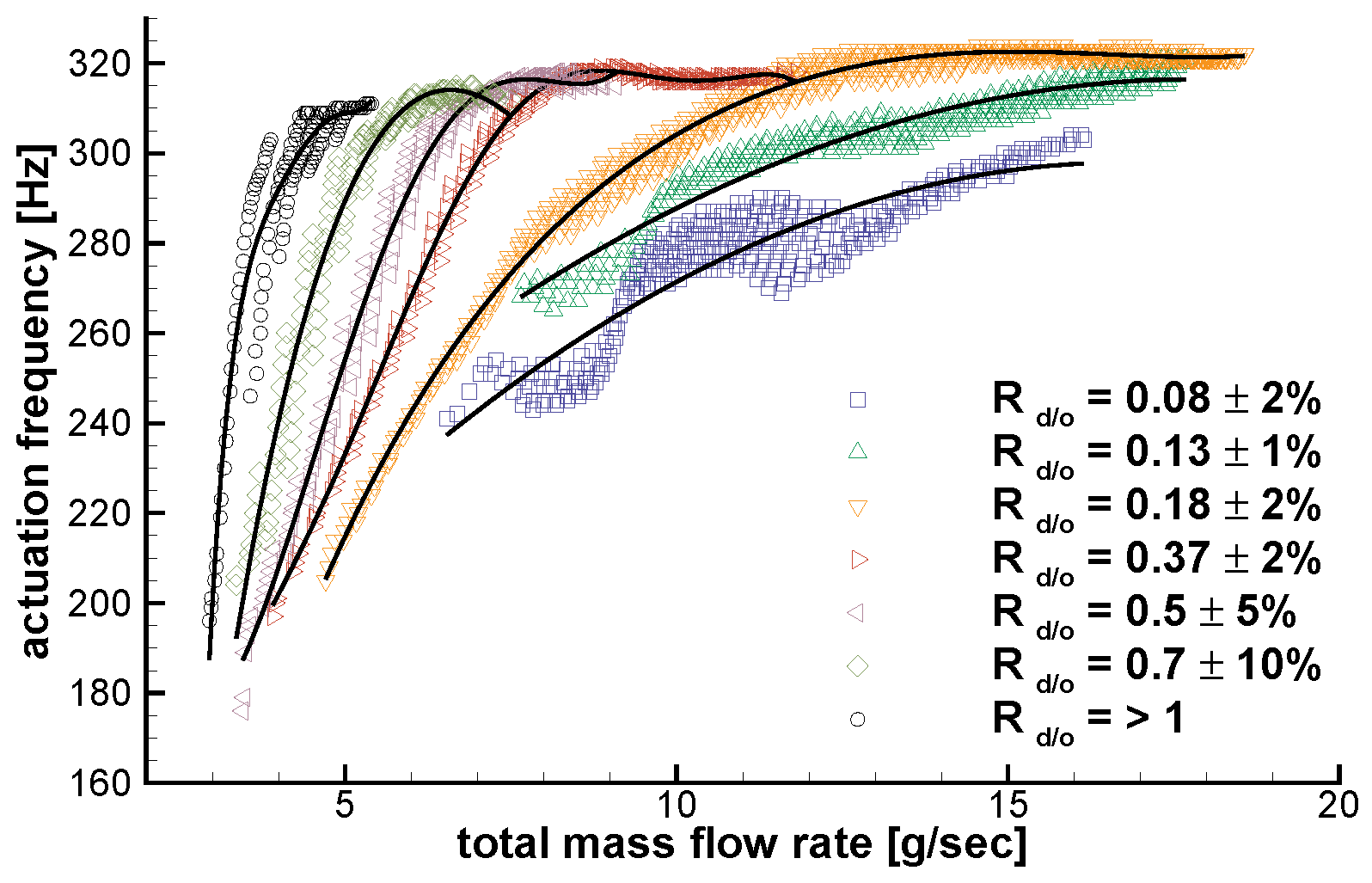
The results for the controlled flow are presented in this section. The performance of AFC will be quantified in terms of the gain in the maximum lift, reduction in drag compared to the base flow at and offset of the stall angle. A deeper understanding of the changes in the flow field is gained by analyzing wake measurements conducted with a traversable five-hole probe rake. Finally, the efficiency of this AFC approach is evaluated in terms of the first aerodynamic figure of merit. In addition to the momentum coefficient, the jet velocity ratios are quoted in the figure legend in order from inboard (S1) to outboard (S3), i.e., (, , ). Although previous experiments on a similar geometry have shown no significant impact of the actuation frequency on the control results, an attempt was made to keep the forcing frequency constant across the actuation amplitude range tested. The frequency band for Segments S1 and S2 ranges from (295 Hz) for to (315 Hz) for . Geometric constraints required a shorter feedback structure on Segment S3, resulting in a higher frequency band, which ranges from (380 Hz) for to (407 Hz) for .
3.3.1. Global Effects of Flow Control
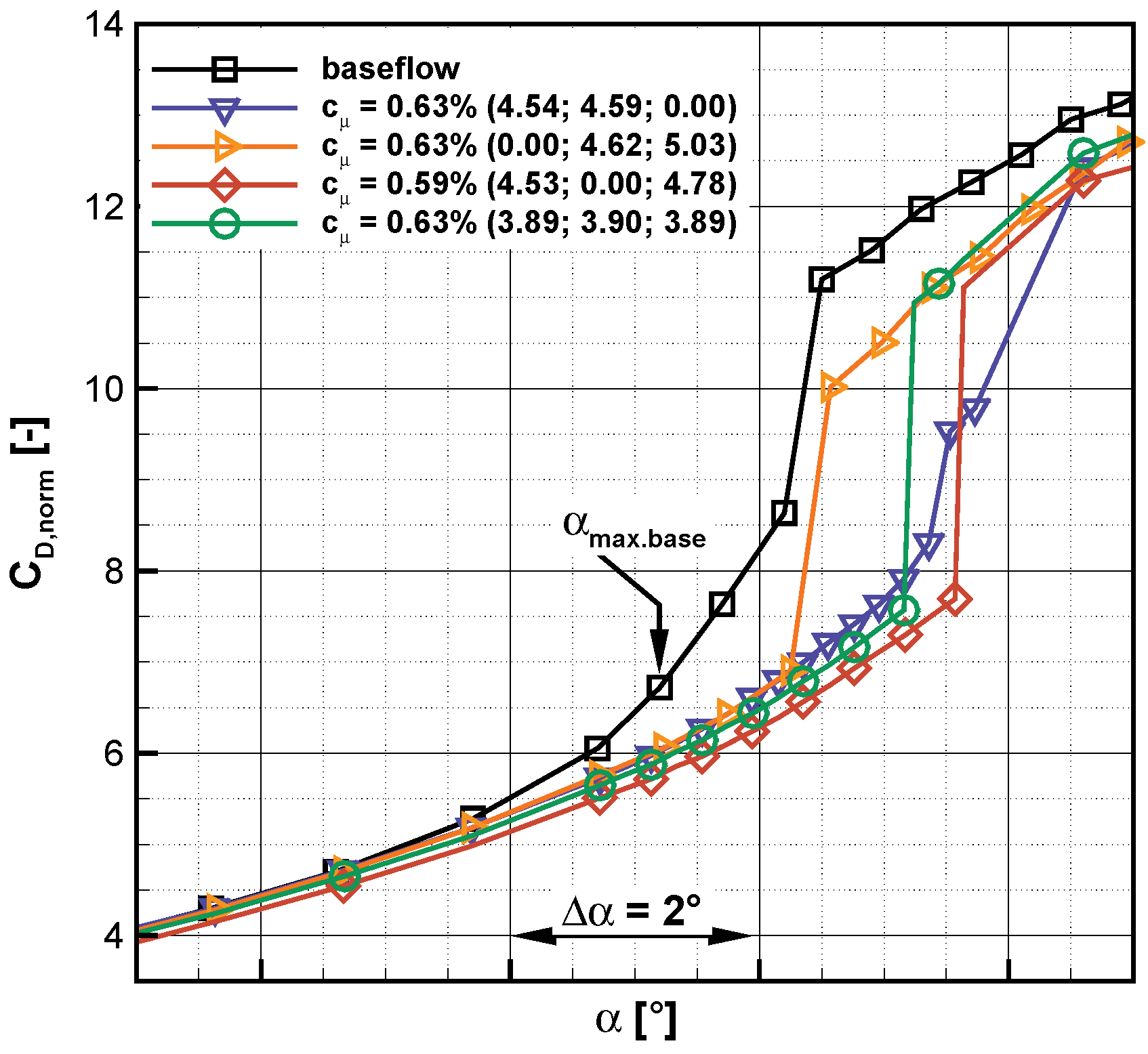
In previous experiments on a similar geometry, we observed that the flow control effectiveness was sensitive to the distribution of actuation along the span. Therefore, the effect of different combinations of segment-wise actuation was evaluated for a constant overall forcing amplitude of
. The resulting drag and lift coefficient curves are presented in
Figure 11 and
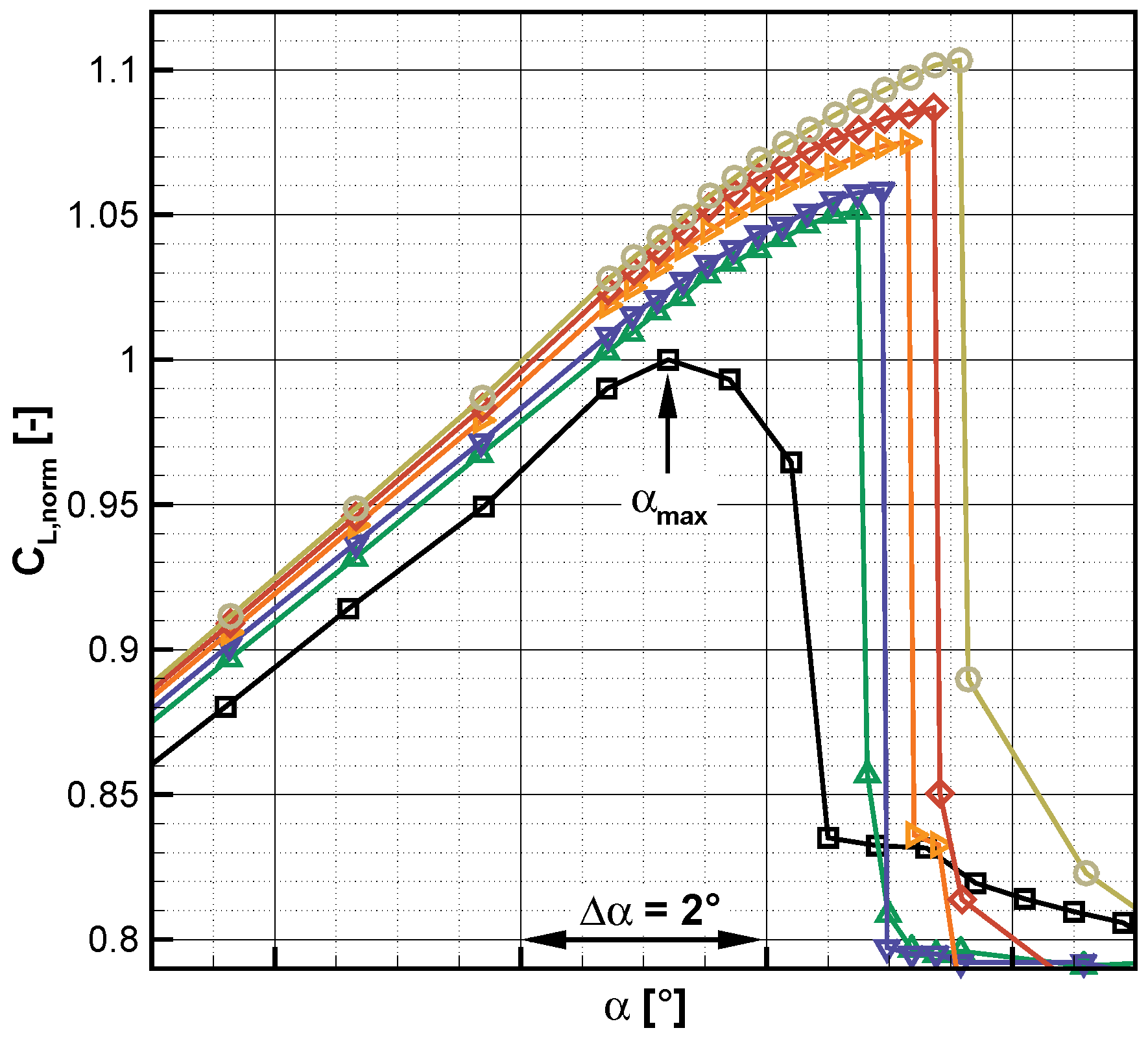
Figure 12, respectively.
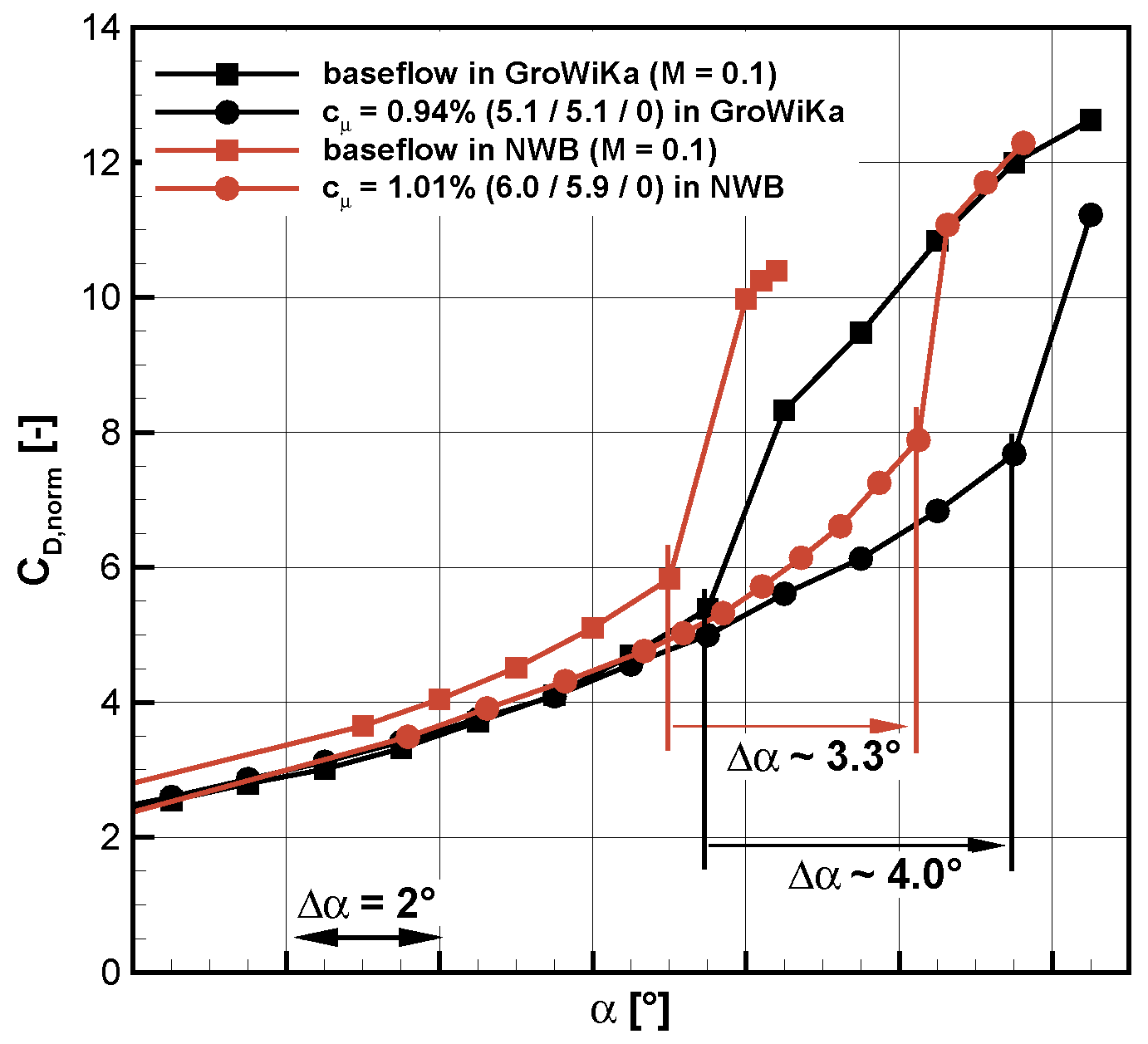
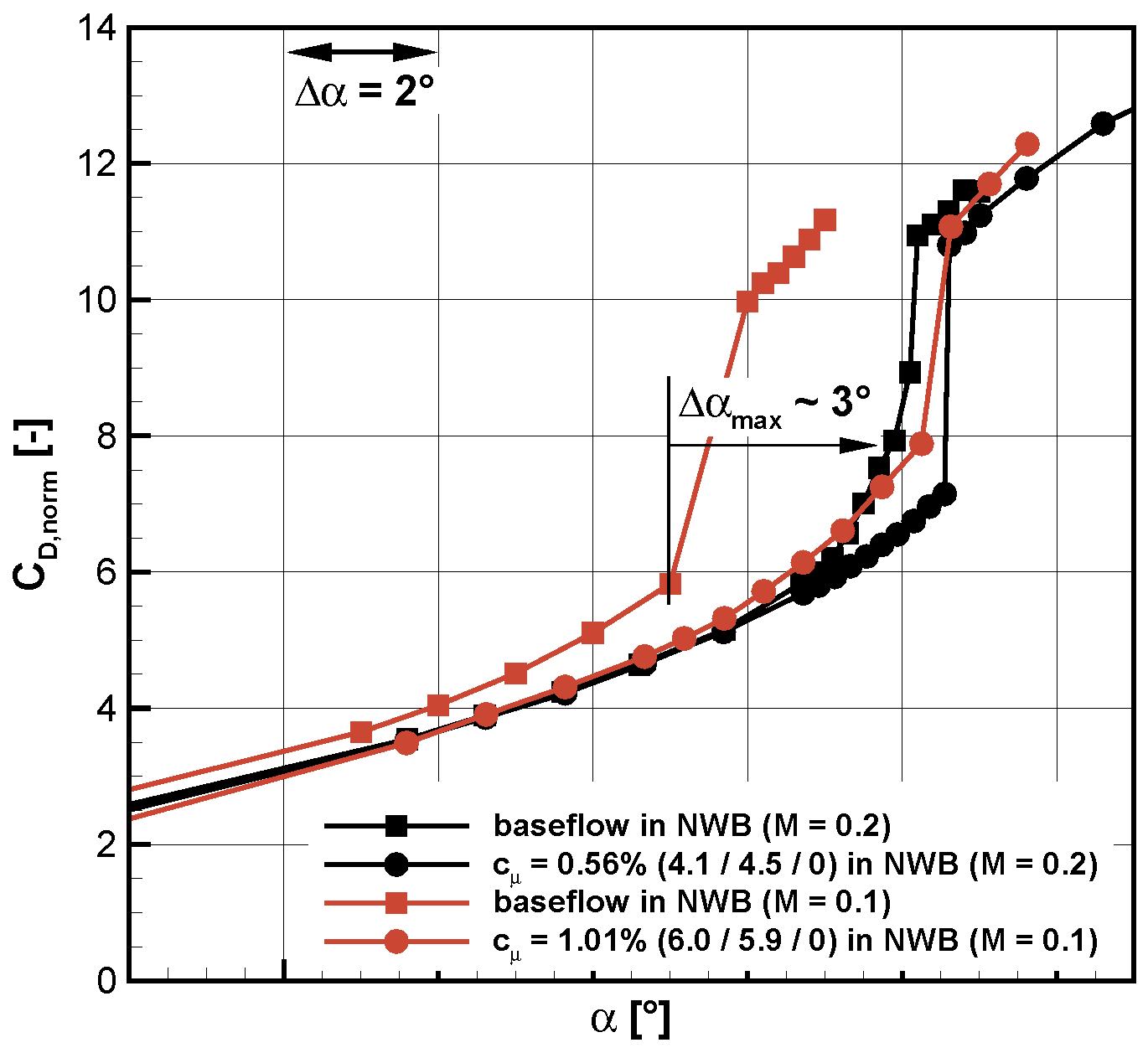
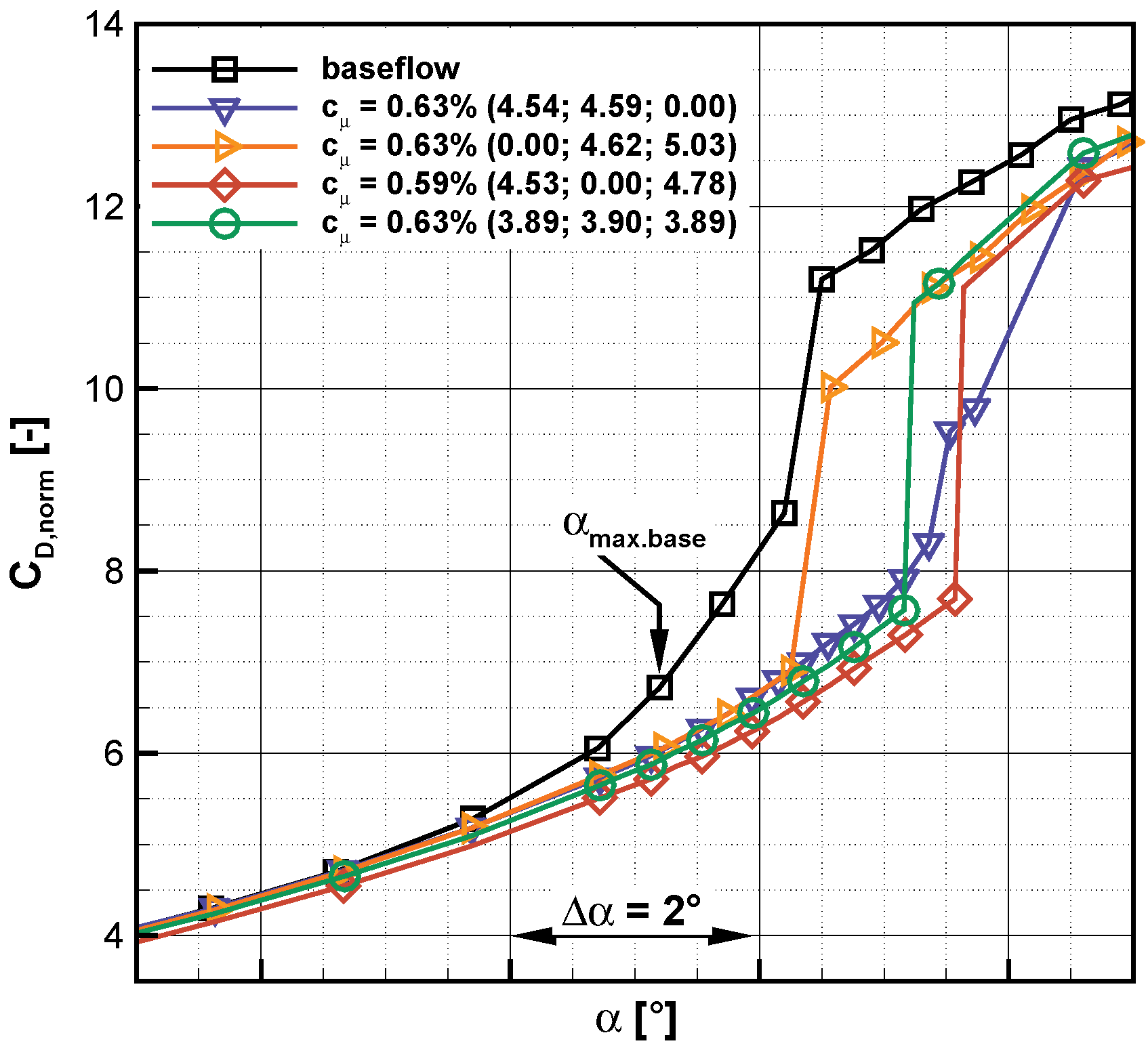
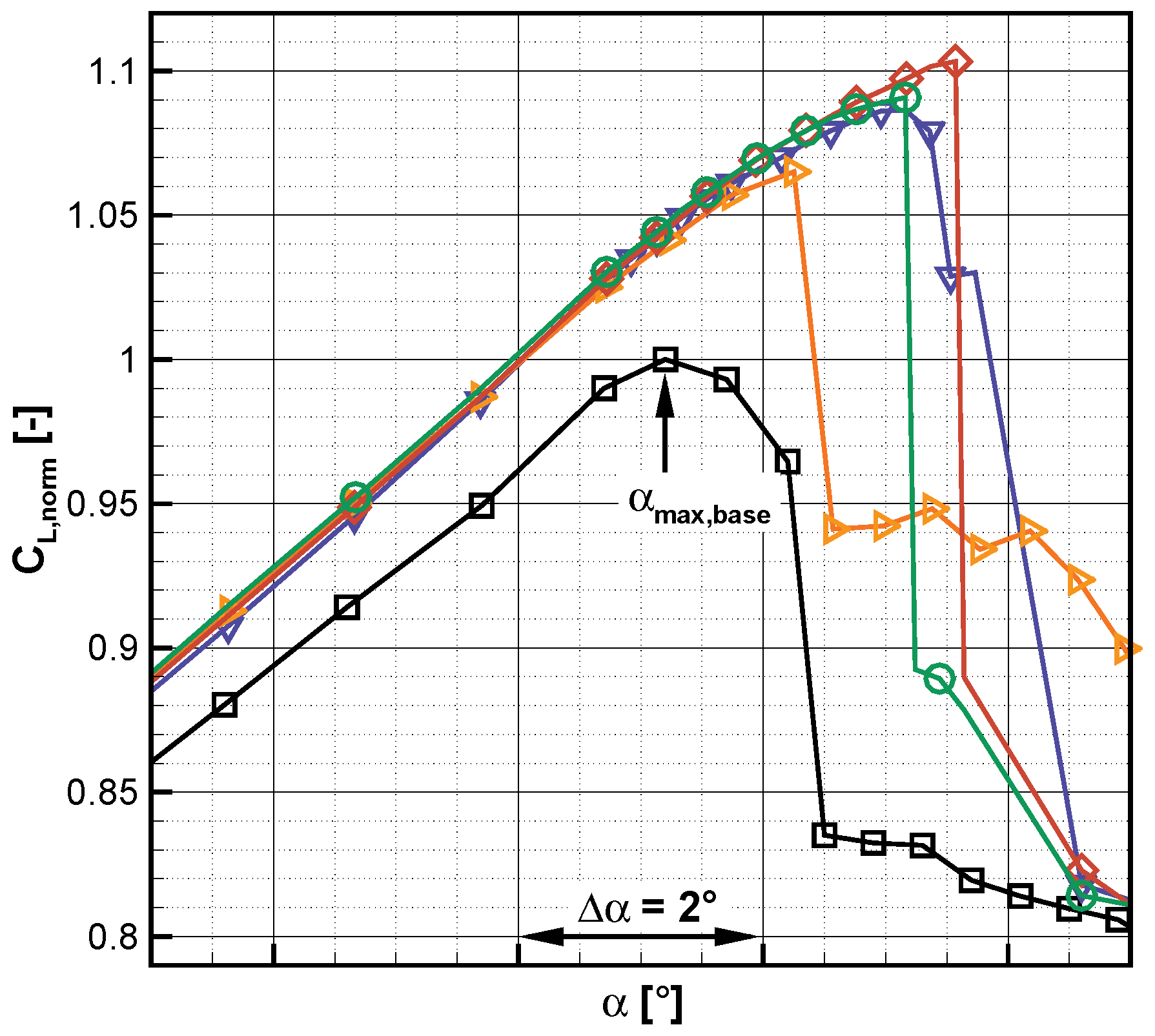
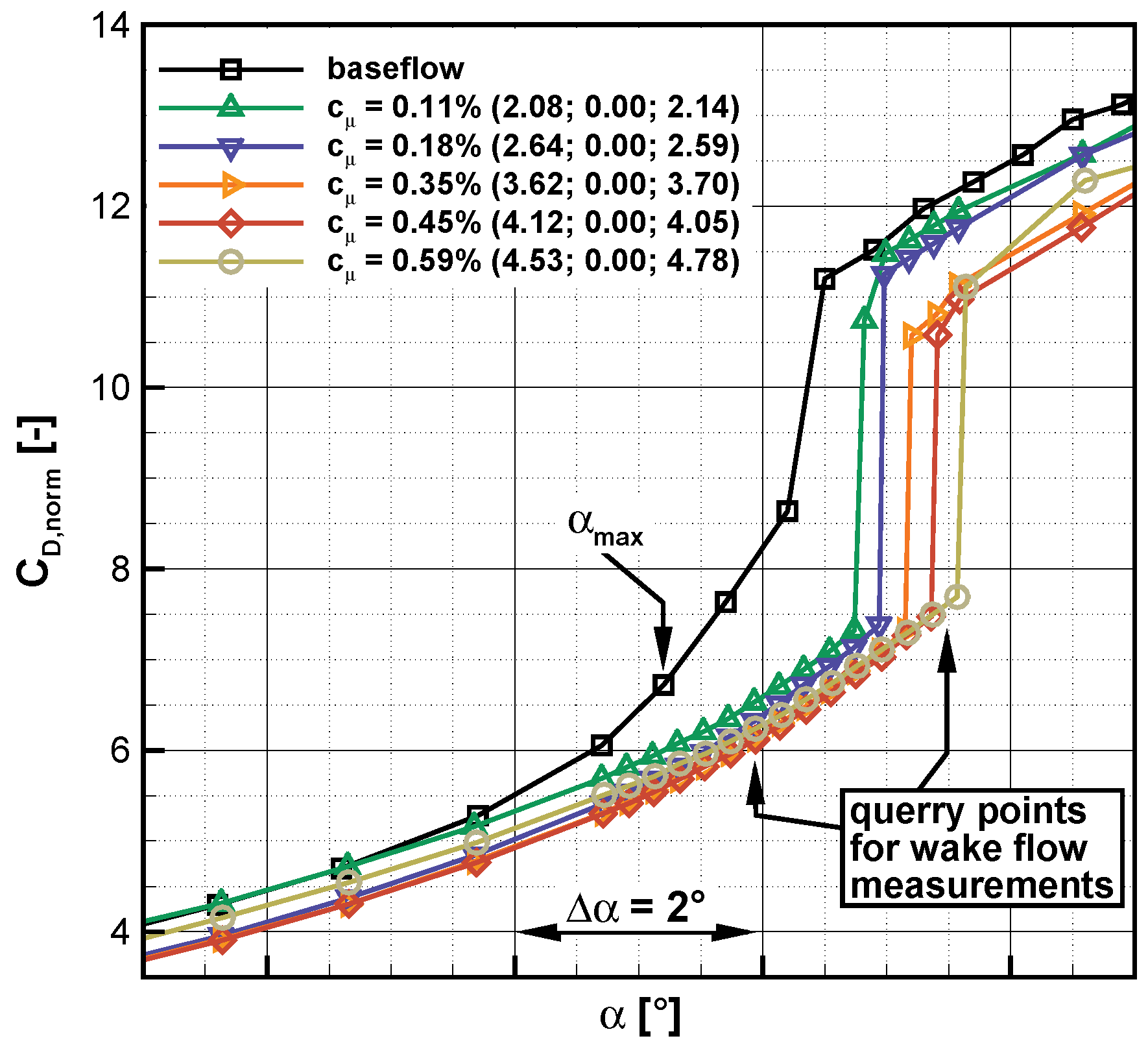
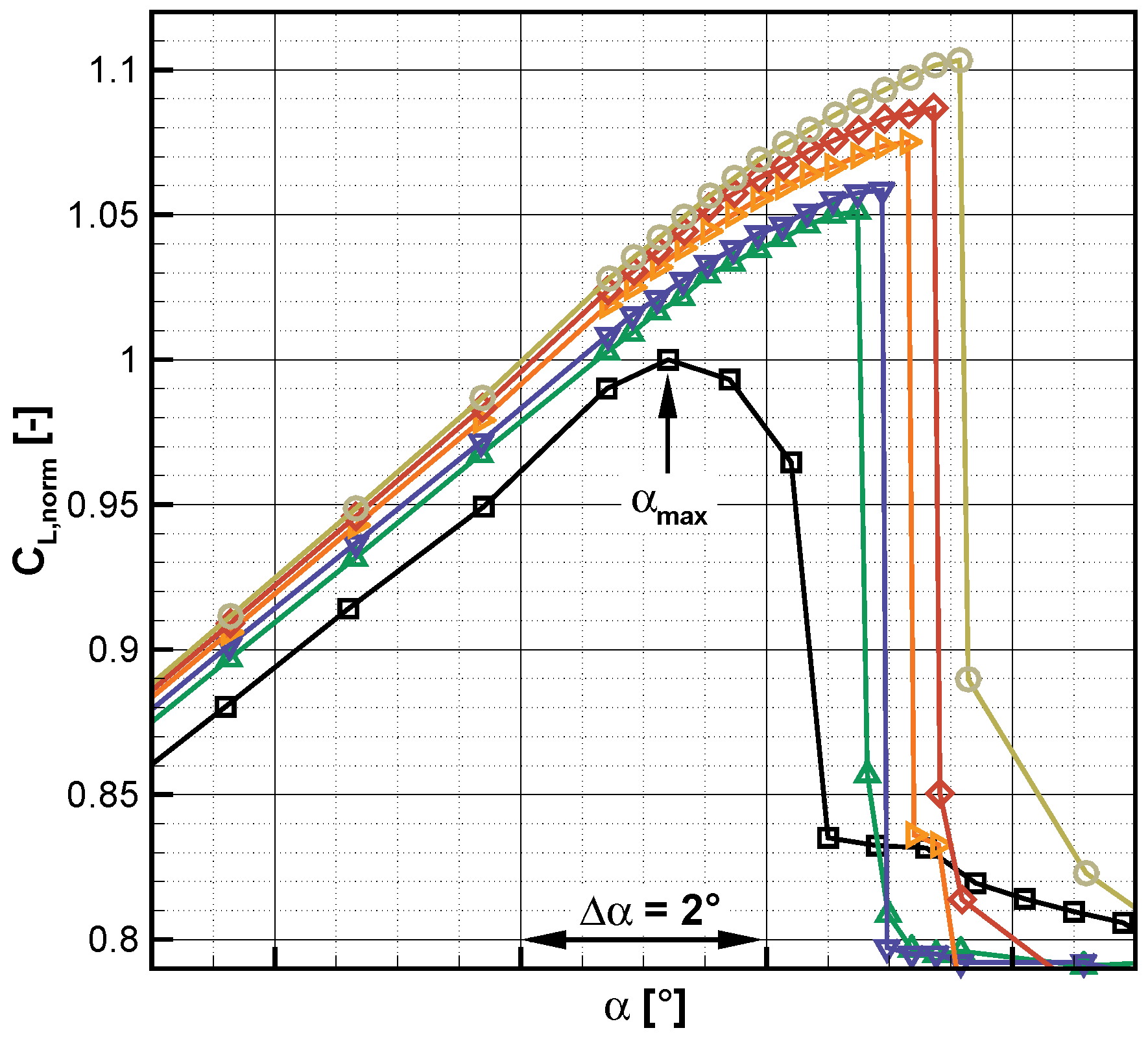
All of the combinations tested improved the stall behavior of the model wing. Although the extent of the improvement differs, the underlying trends are similar. At a sufficiently low incidence (e.g., −4°), the effect of flow control on the drag coefficient is negligibly small. In the incidence range between −3° and the corresponding , the (ideally) parabolic shape of the drag coefficient curve is maintained as a result of forcing. This can be attributed to the reduction in the cross-flow on the model and the prevention of separation on the outboard half of the wing. In contrast to the drag, the lift is affected by flow control over the entire range of the angles of attack tested. In the linear range of the lift curve, the lift coefficient is offset by a constant depending on the momentum coefficient, but not on the distribution of the actuation along the span. Once stall occurs, the resulting drag rise and lift drop are more abrupt than those for the base flow. Here, the exception is actuation with Segments S1 and S2 combined, for which separation on the model occurs in two distinct steps. For this combination, the flow on the winglet separates, but the flow stays attached in the region trailing the slat edge for an additional . This results in an intermediate step in the drag coefficient curve and milder stall behavior.
The difference in effectiveness for the segment combinations tested becomes apparent when the stall angle (), maximum lift () and drag coefficient value () at each are considered. According to those indicators, actuation with Segments S1 and S3 yields the highest benefit. For a momentum coefficient of , forcing with these two segments offsets stall by 2.4° and increases the maximum lift coefficient by more than 10%. The drag coefficient at is reduced by 37% with respect to the base flow value.
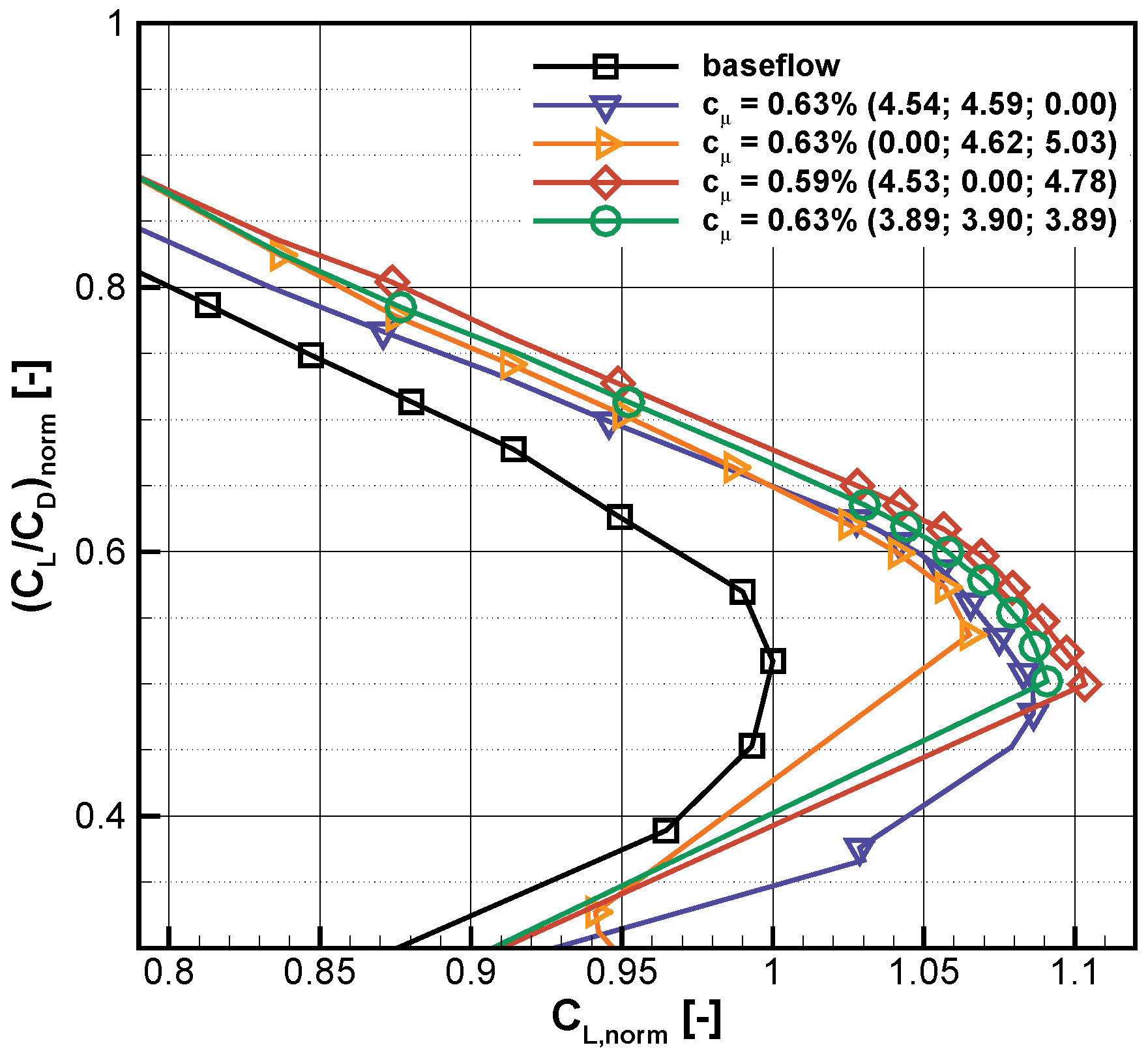
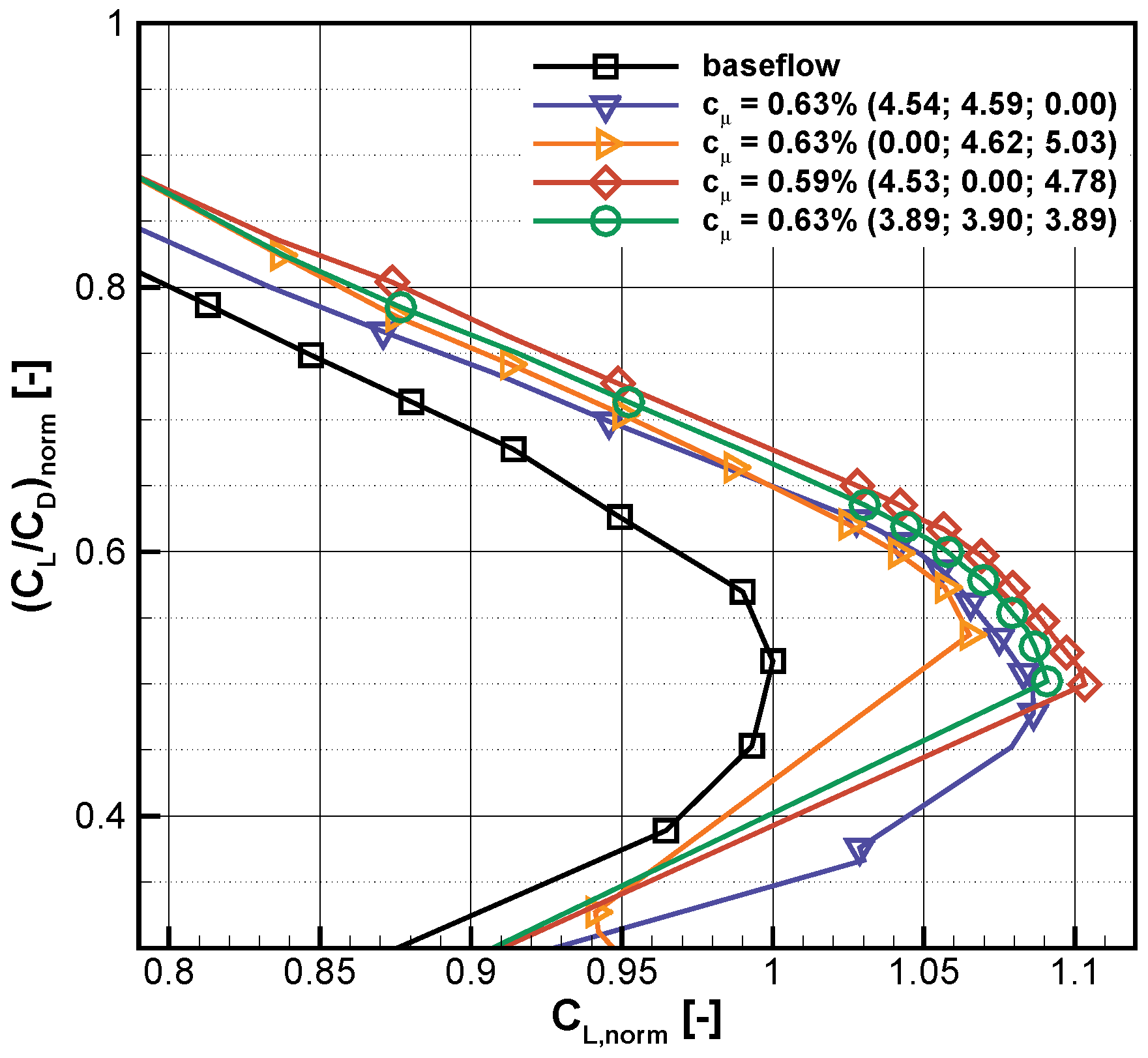
The aerodynamic efficiency of a wing is given by the ratio of
over
, which is plotted versus the lift coefficient in
Figure 13 for the segment variation considered above. Again, with respect to this quantity, the combination of Segments S1 and S3 produces the best results. The effect of flow control is positive over the entire incidence range. At the original (base flow)
, the aerodynamic efficiency is increased by 30%, whereas for maintaining the original aerodynamic efficiency, a lift increase of 9.5% is achievable. Actuation with all other combinations of segments is beneficial as well, but to a lesser extent.
For actuation using the most effective segment combination, Segments S1 and S3, the drag and lift coefficient curves for different forcing amplitudes are presented in
Figure 14 and
Figure 15, respectively. Increasing the forcing amplitude successively improves the aerodynamic performance of the model wing, and no saturation is observed within the available range of momentum coefficients. The highest forcing amplitude of
is produced at a jet velocity ratio of approximately 4.7, which implies an almost sonic peak jet exit velocity (
). Between the lowest (
) and highest (
) forcing amplitudes tested, the resulting offset in stall angle ranges from
, and the maximum lift increases in the range of
. The drag reduction at
varies only slightly within the band of forcing amplitudes tested, showing an improvement of approximately
compared to the uncontrolled base flow.
An overview of the flow control performance as a function of the momentum coefficient and jet velocity ratio for different combinations of segments is provided in
Figure 16,
Figure 17,
Figure 18 and
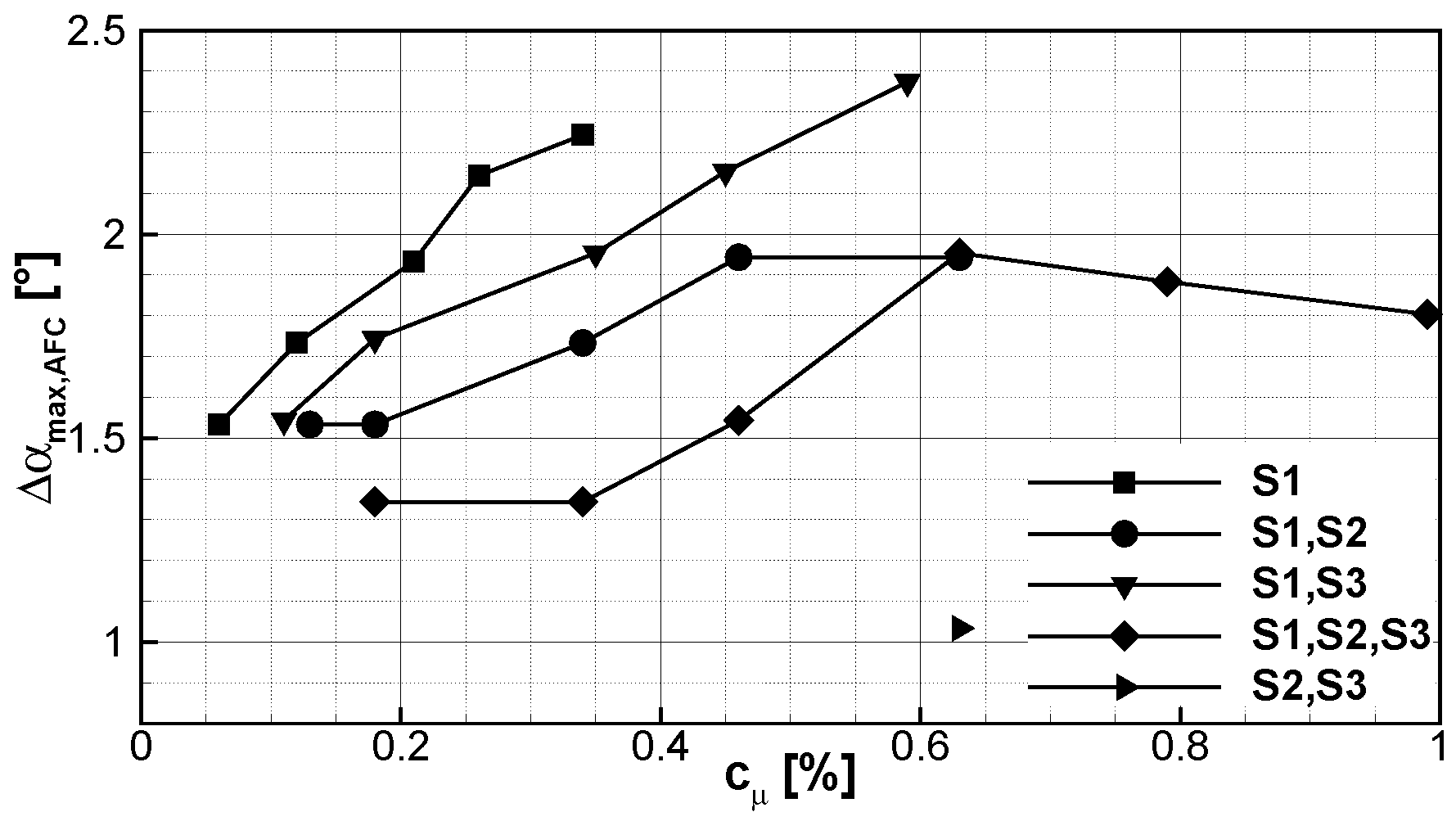
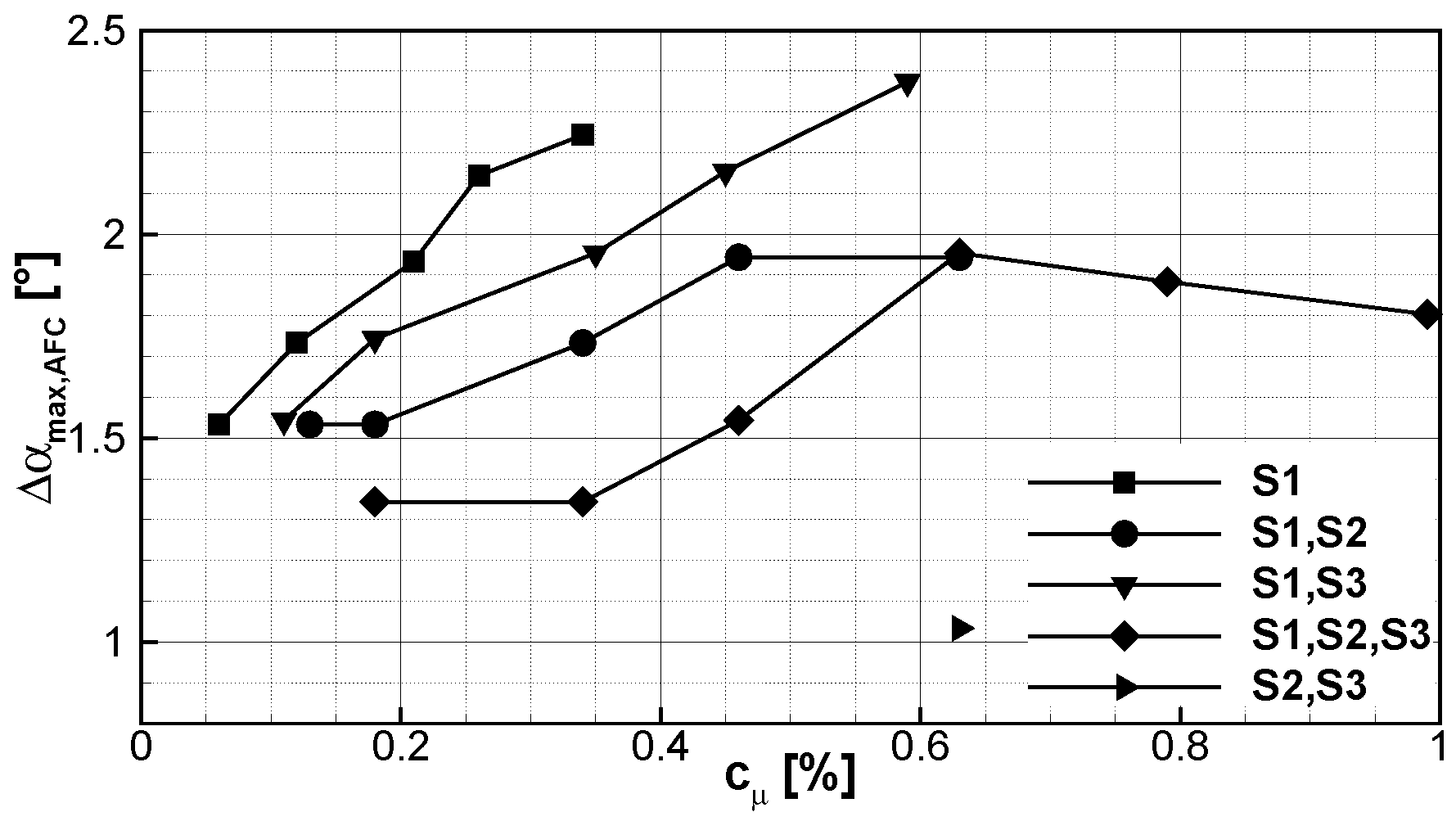
Figure 19. Note that only one data point is available for the combination of Segments S2 and S3. The offset in the stall angle is presented in
Figure 16 as a function of the momentum coefficient.
With respect to the stall angle, it is noteworthy that forcing with only Segment S1 significantly shifts the onset of stall to higher incidences at relatively low momentum coefficients, offsetting stall by up to
at a momentum coefficient of
. In comparison, actuation with Segments S1 and S3 can produce a higher maximum shift in
(additional
of
), but this combination requires almost twice the investment in terms of the momentum coefficient to produce an identical offset in the stall angle. All other combinations of segments increase the stall angle by less than 2°. Plotting
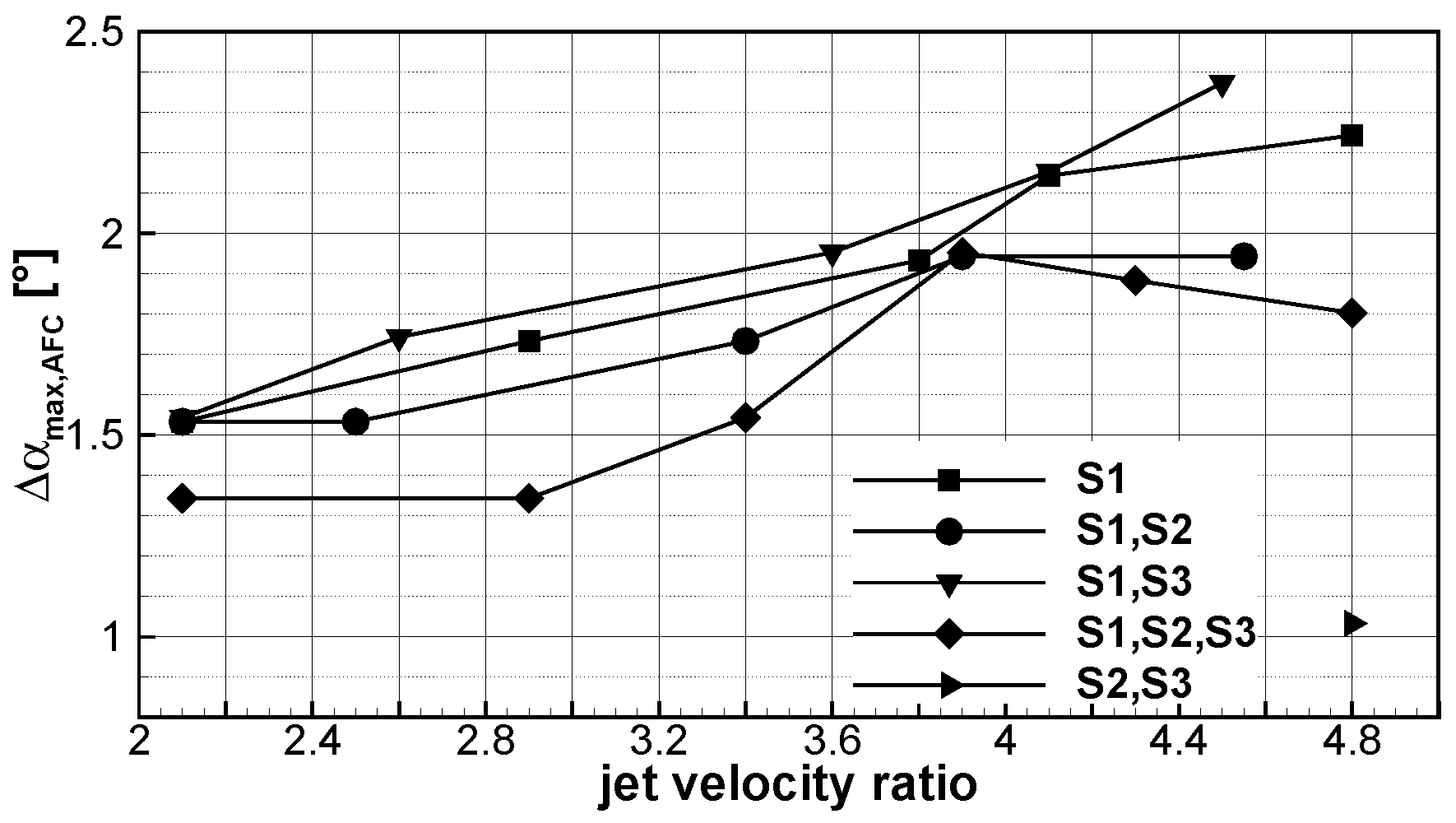
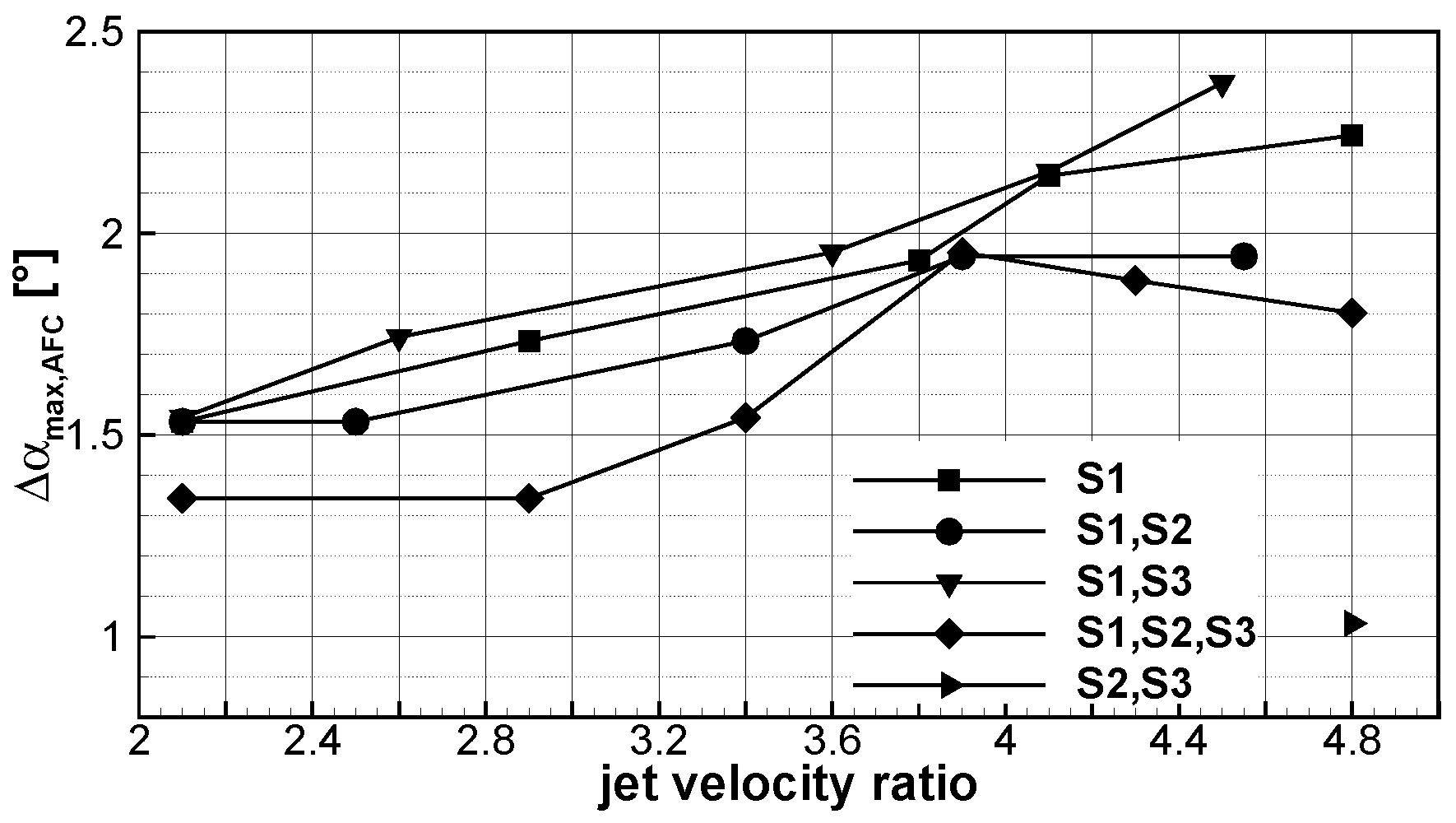
versus the jet velocity ratio (see
Figure 17) appears much better suited to collapse the curves shown, indicating that, with respect to the increase in the stall angle, this ratio is the dominant AFC parameter compared to the total momentum or mass addition. For velocity ratios smaller than four, the curves for the segment combinations (S1), (S1,S2) and (S1,S3) lie within a band of
from the average value. The results for forcing with all three segments (S1,S2,S3) lie below this band as a result of the different (two-step) stall behavior described above. For velocity ratios larger than four, the curves diverge, as forcing combinations that include segment S2 do not lead to additional benefit in terms of a further increase in jet exit velocity. The lift gain as a function of
is presented in
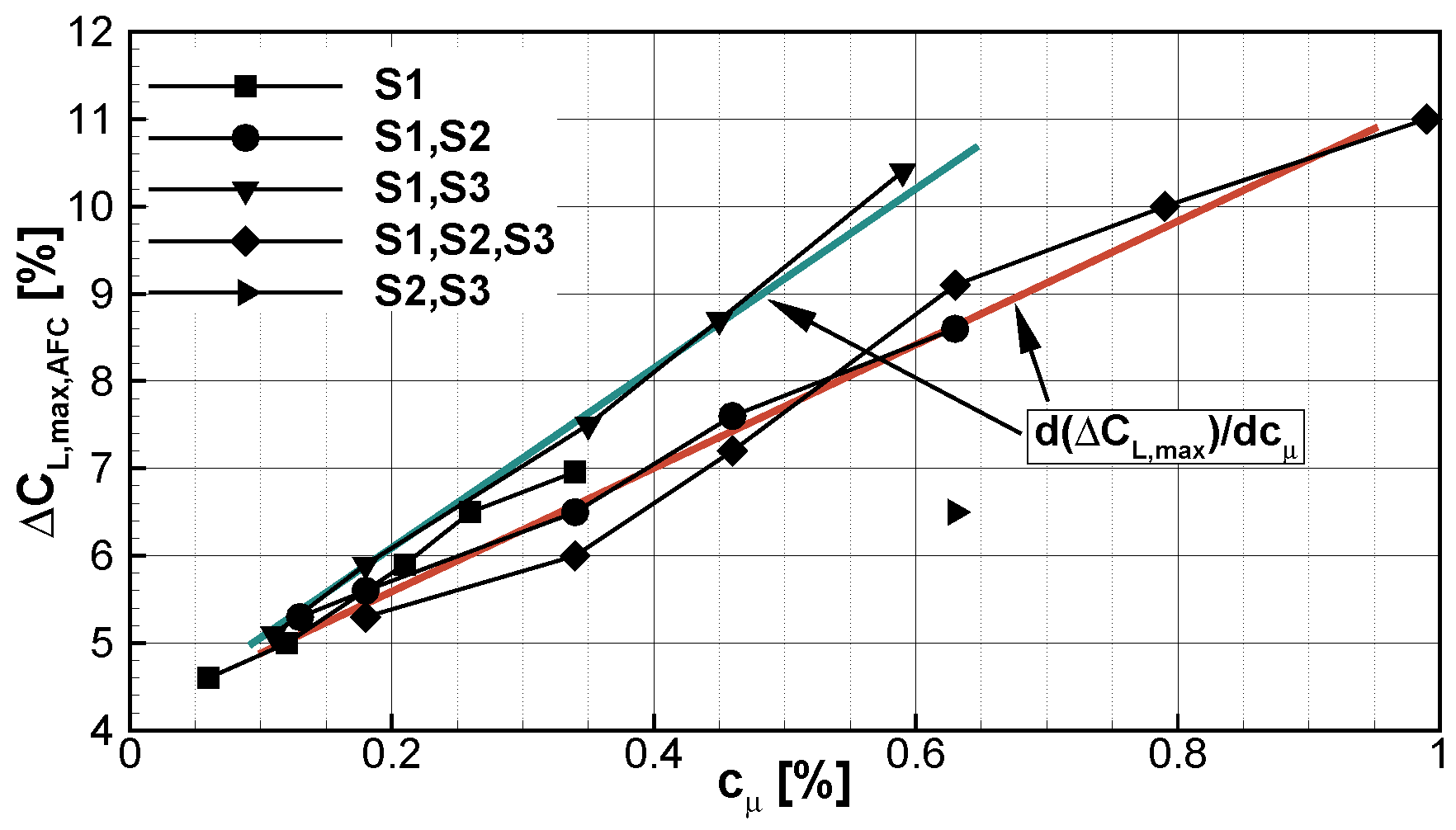
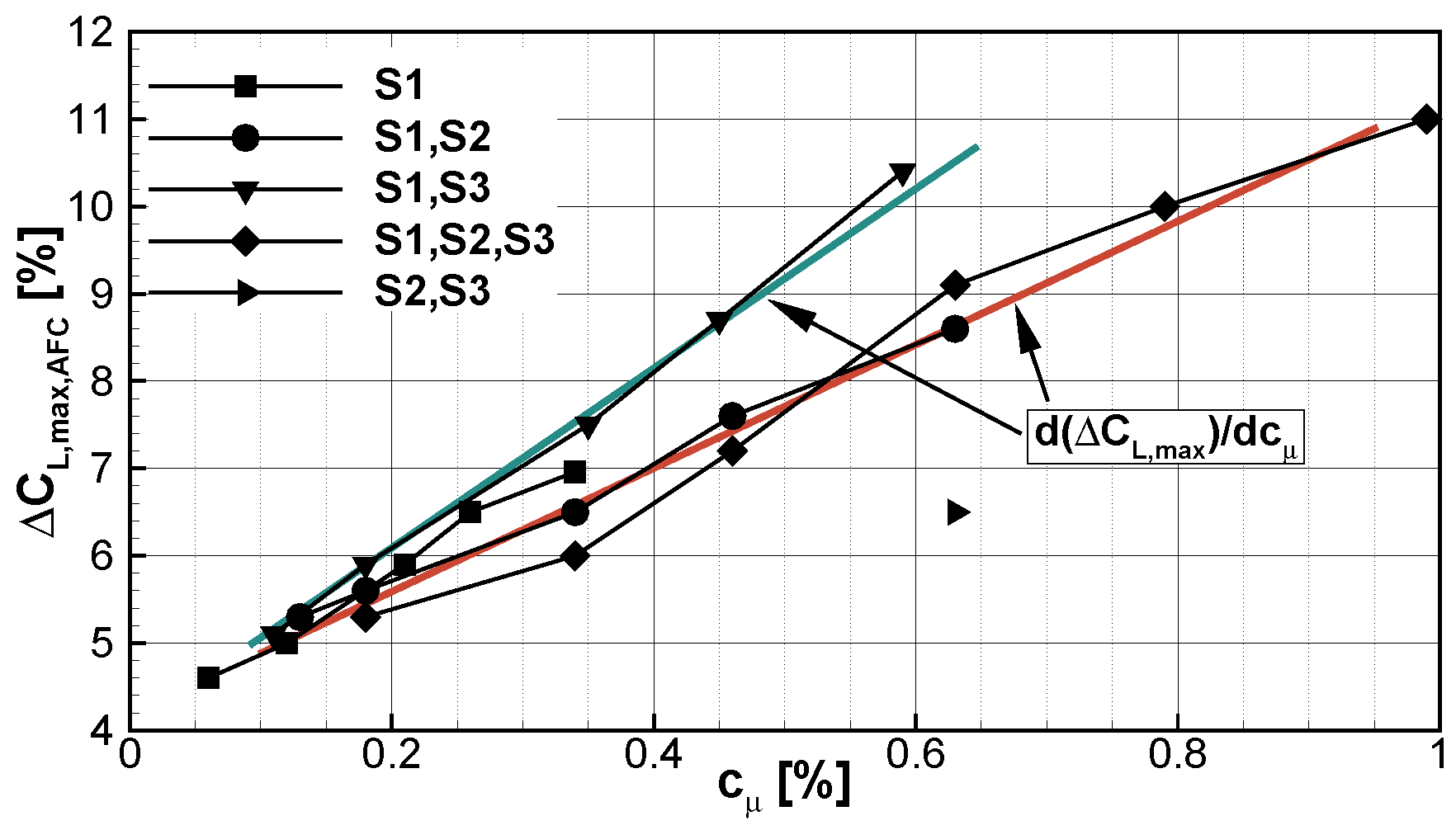
Figure 18.
Here, an almost linear increase in the lift gain is observed with increasing momentum coefficient. The slope (
) of the curves associated with forcing with Segment S1 only and with Segments S1 and S3 combined is steeper than that for any segment combination that includes forcing with Segment S2. The inefficiency of including Segment S2 in the control attempt becomes apparent when actuation with Segments S1 and S3 is compared to actuation with all three segments. While the maximum increase in
is marginally higher when all three segments are operated (
= 11% vs.
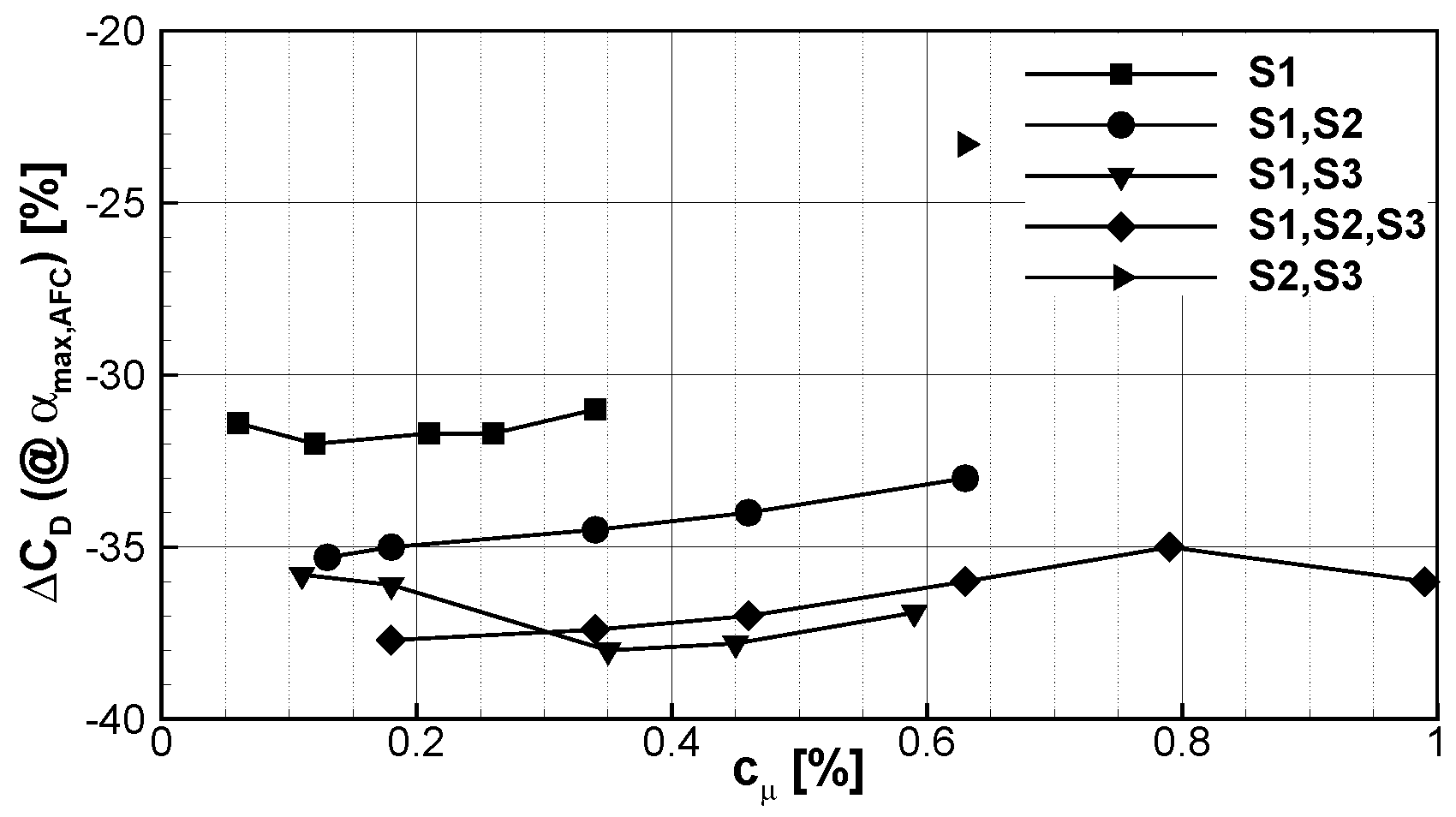
= 10.4%), the required momentum input in terms of momentum coefficient to achieve a similar lift gain is approximately 40% higher than for actuation with Segments S1 and S3 only. Although the offsets in the stall angle and lift gain exhibit a distinct dependence on the momentum coefficient, this is not observed in the reduction of the drag at
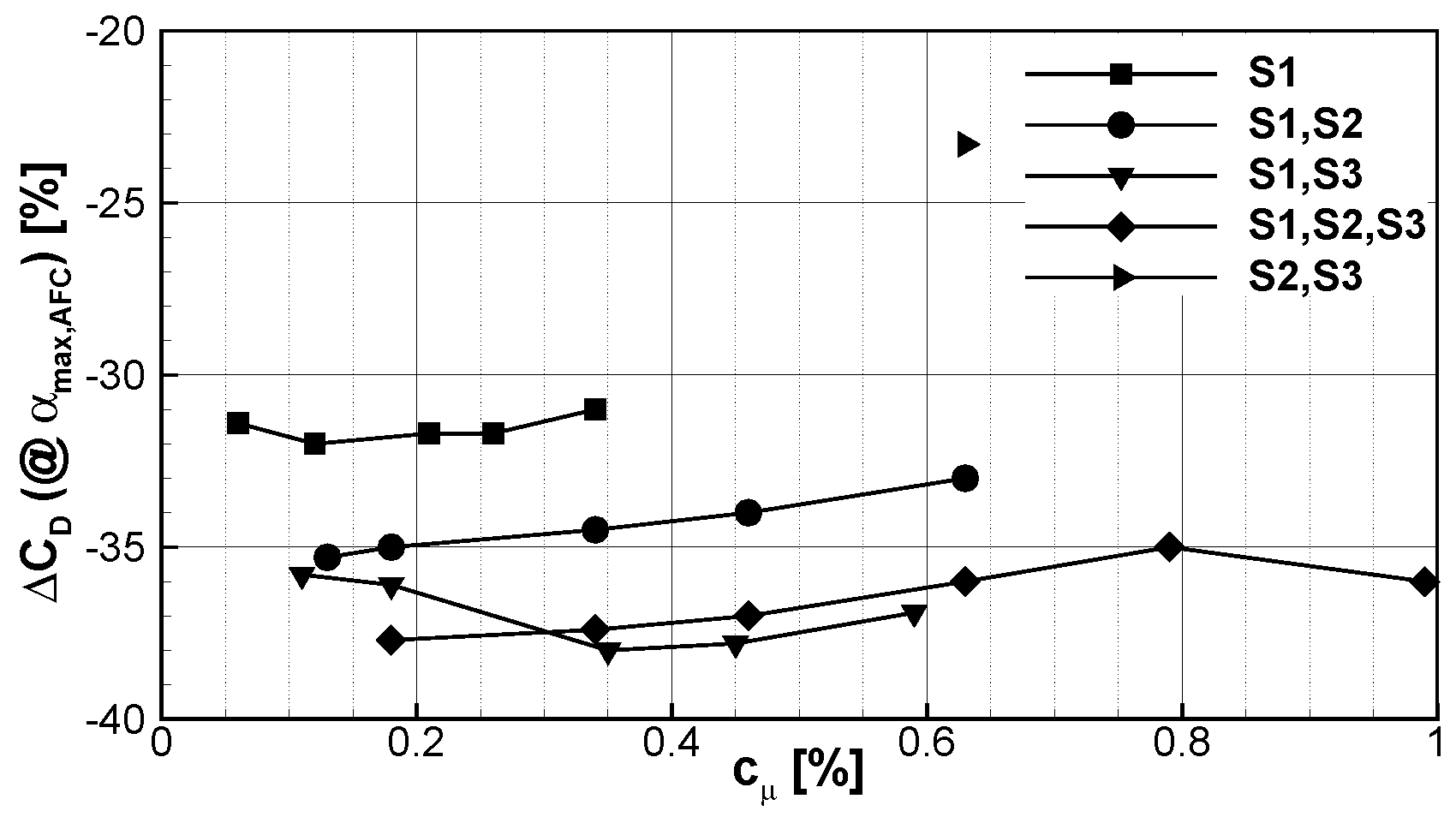
relative to the respective base flow values, as shown in
Figure 19.
Here, the percentage by which the drag coefficient is reduced is approximately constant across the range of momentum coefficients tested and depends only on the combination of segments operated. The highest drag reduction is realized using the combination of Segments S1 and S3 or Segments S1, S2 and S3, which decreases the drag coefficient by approximately 37%. Operation of Segments S2 and S3 yields the least benefit, resulting in a drag decrease of less than 23%.
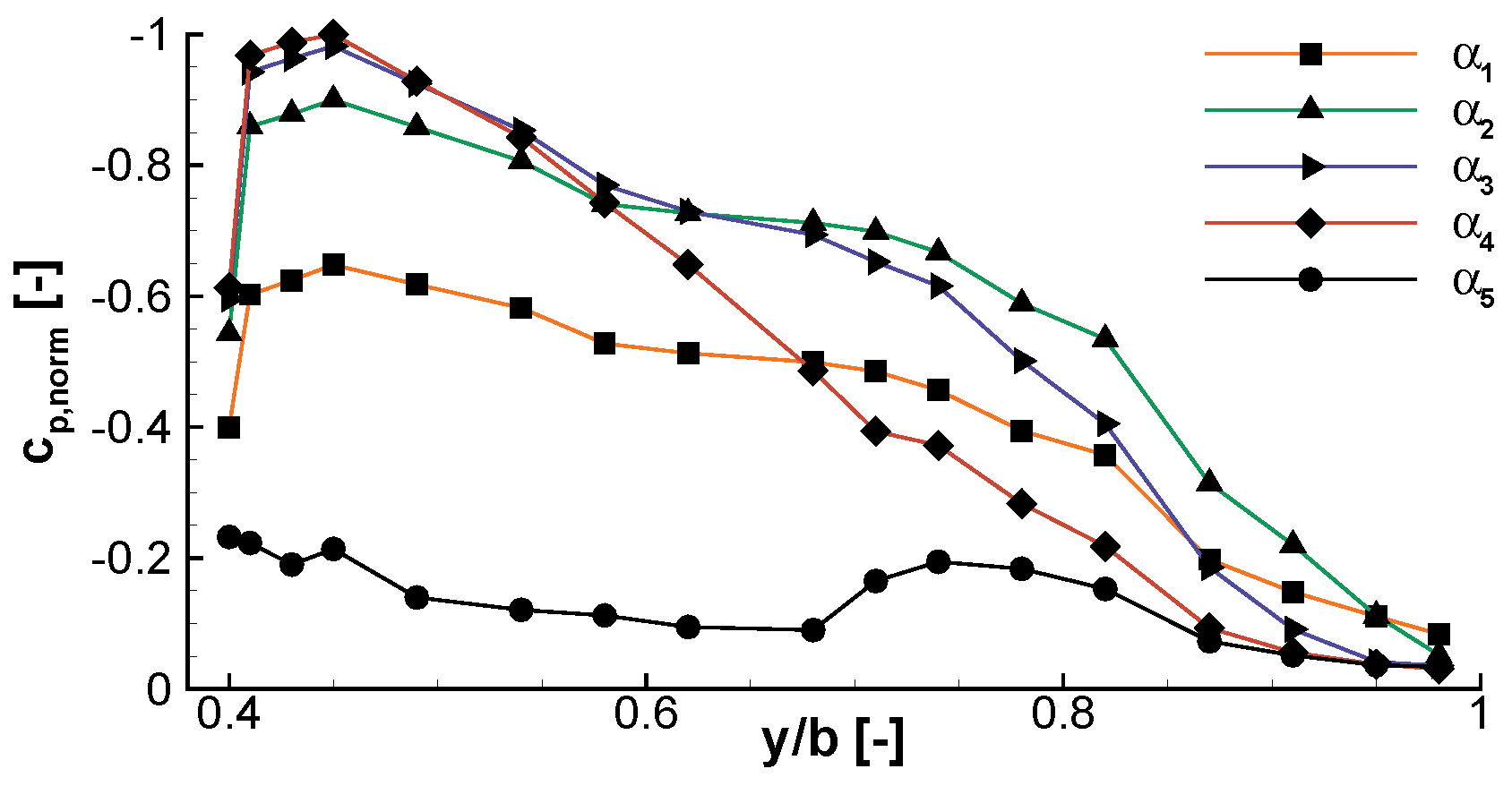
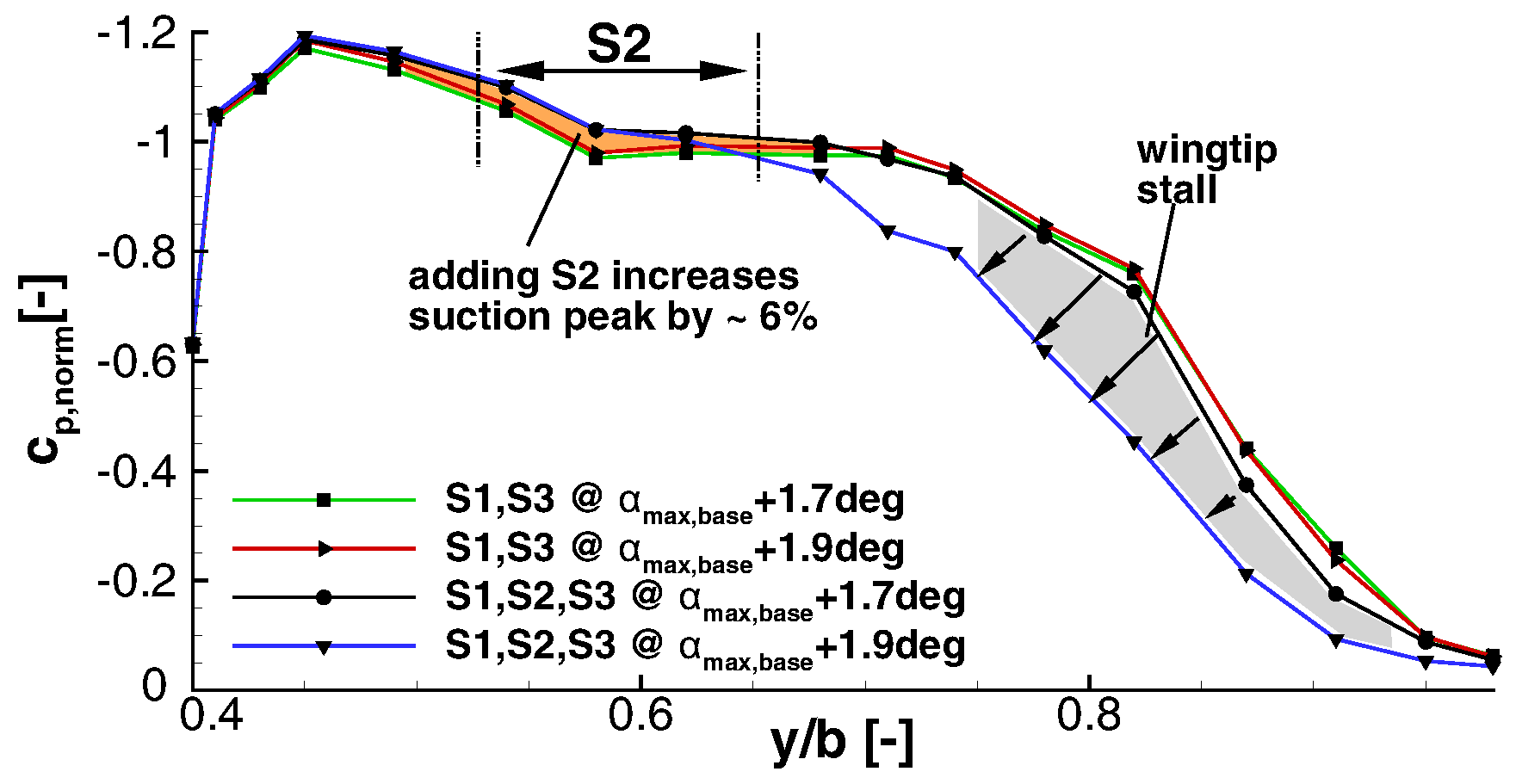
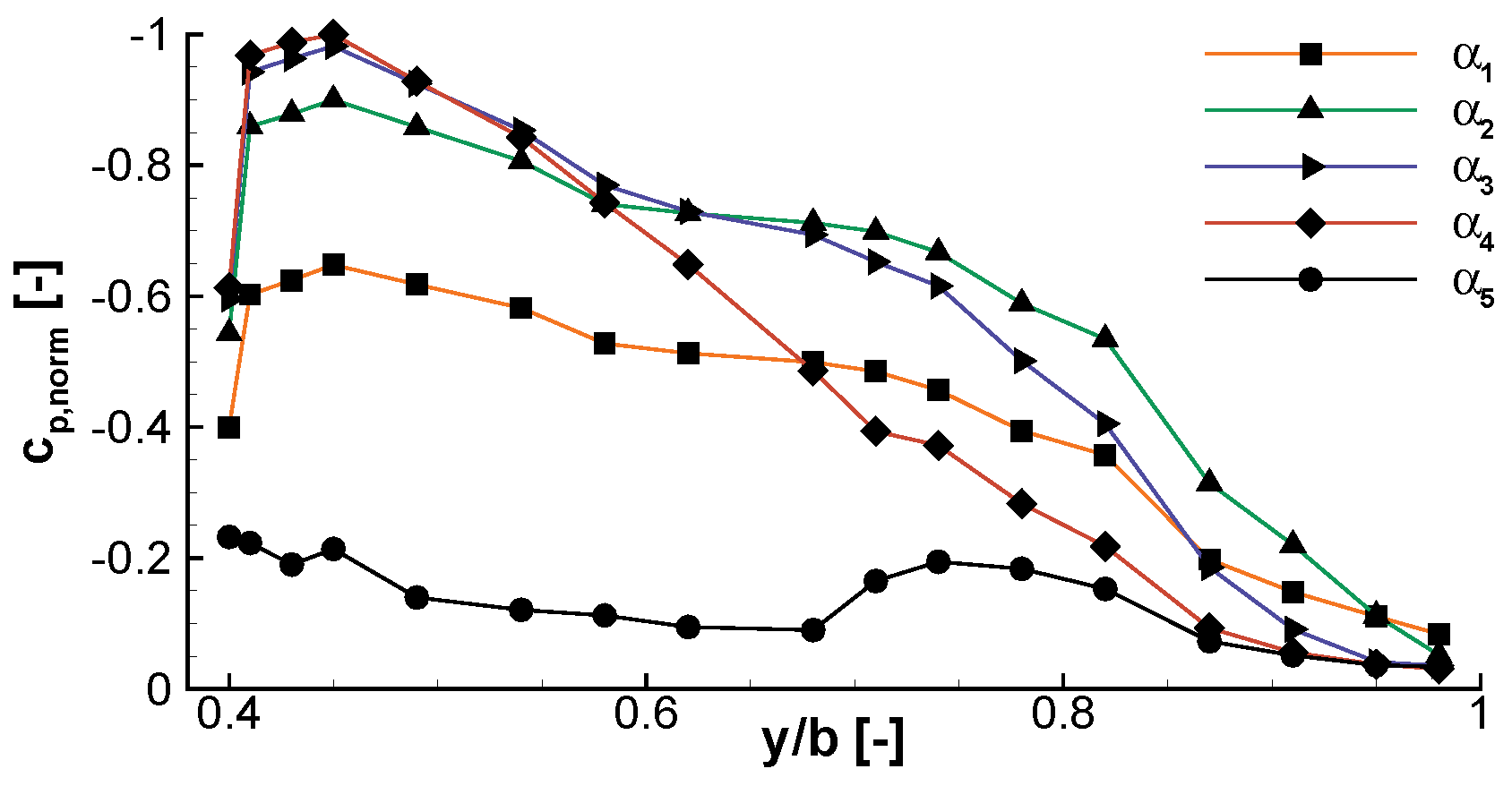
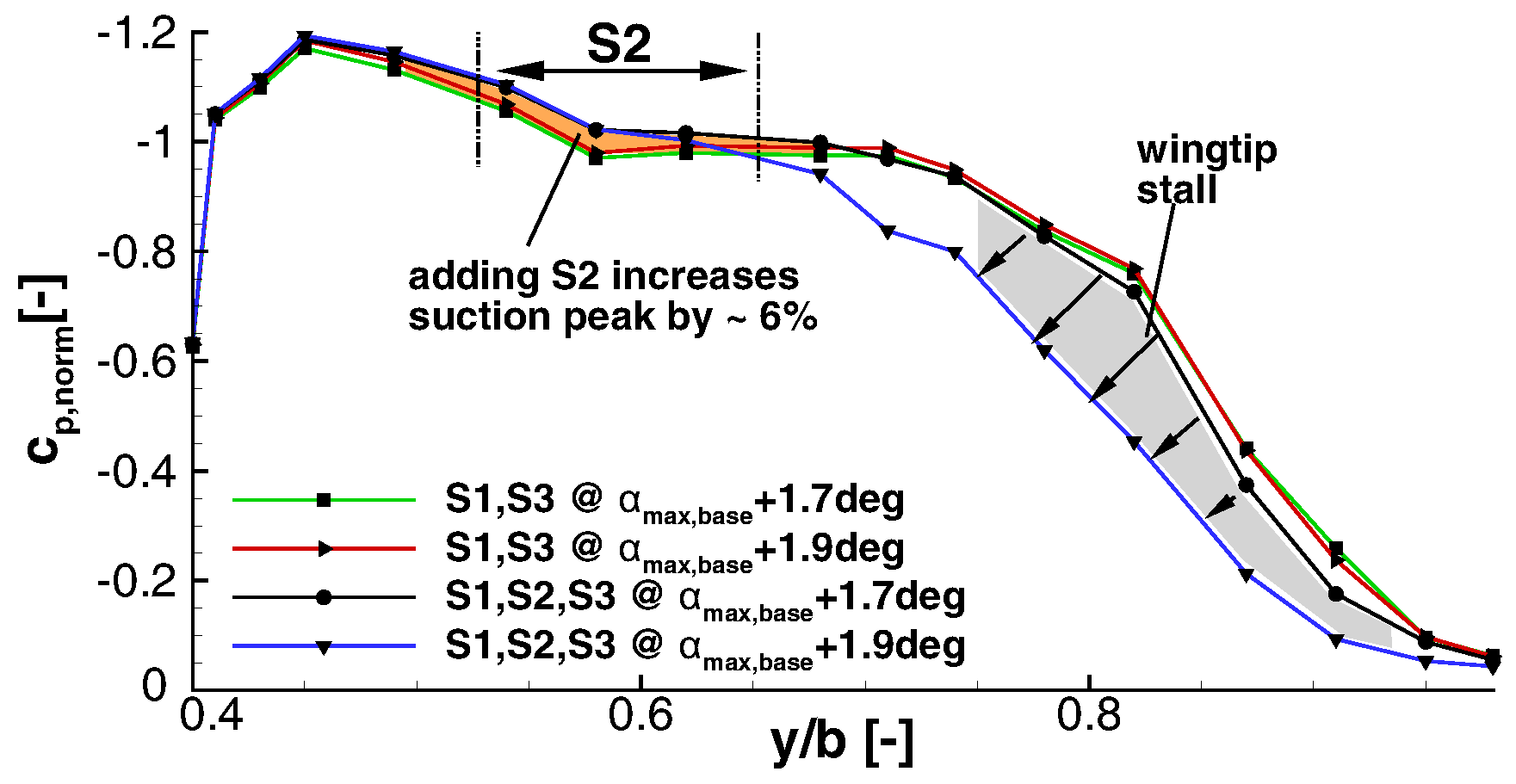
To conclude this section on the global effects of flow control, we attempt to explain the counterintuitive observation that the addition of local forcing (namely with Segment S2) deteriorates the effectiveness of AFC for otherwise identical forcing parameters. For this purpose, the pressure coefficient distribution along the span (constant
= 0%) is displayed in
Figure 20 for two different combinations of segments: inner and outer segments (S1, S3;
) and all three segments (S1, S2, S3;
), with all segments operated at a velocity ratio of
. The incidence angles shown correspond to
(which is 1.7° beyond
) and an additional increment of +0.2°.
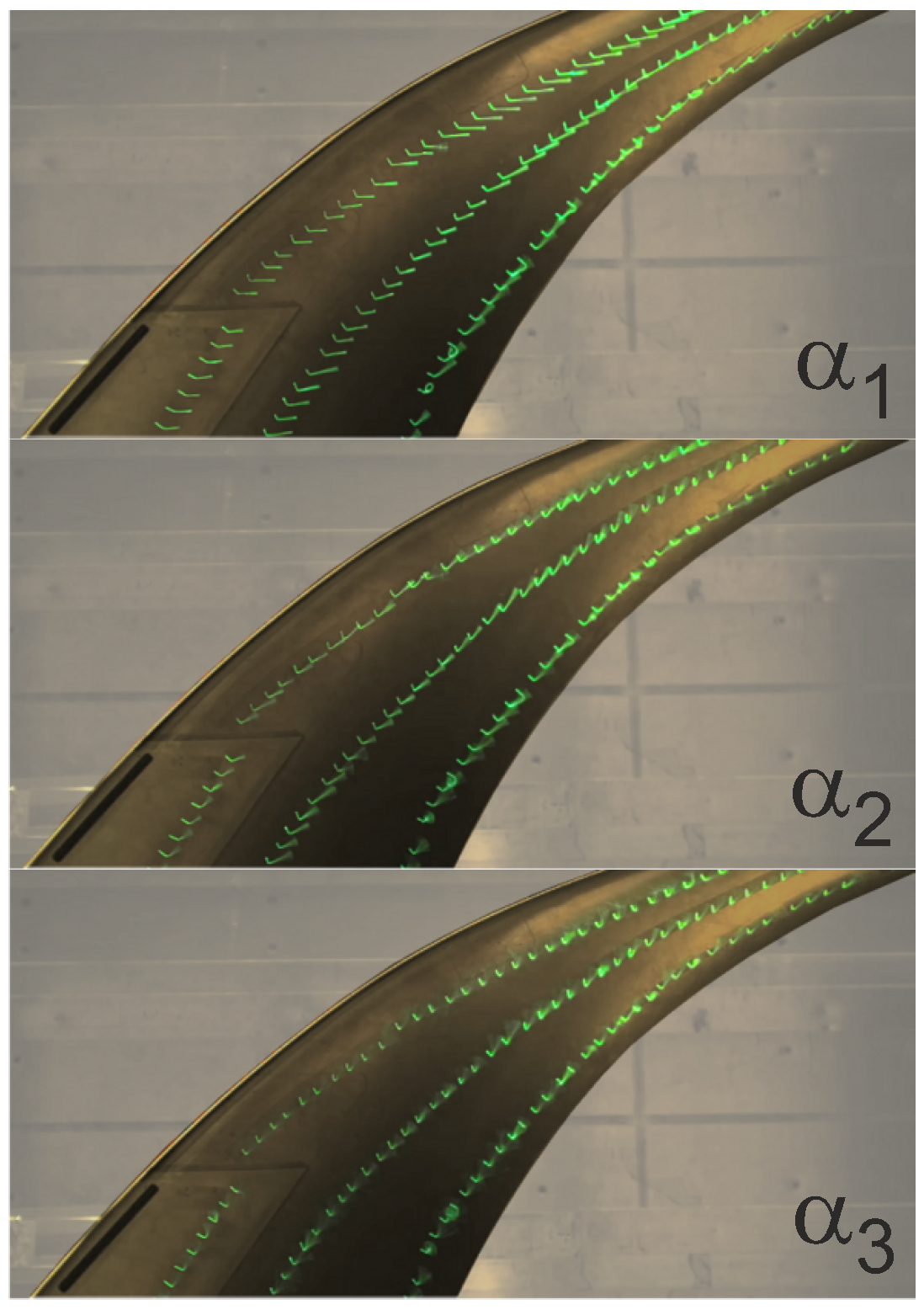
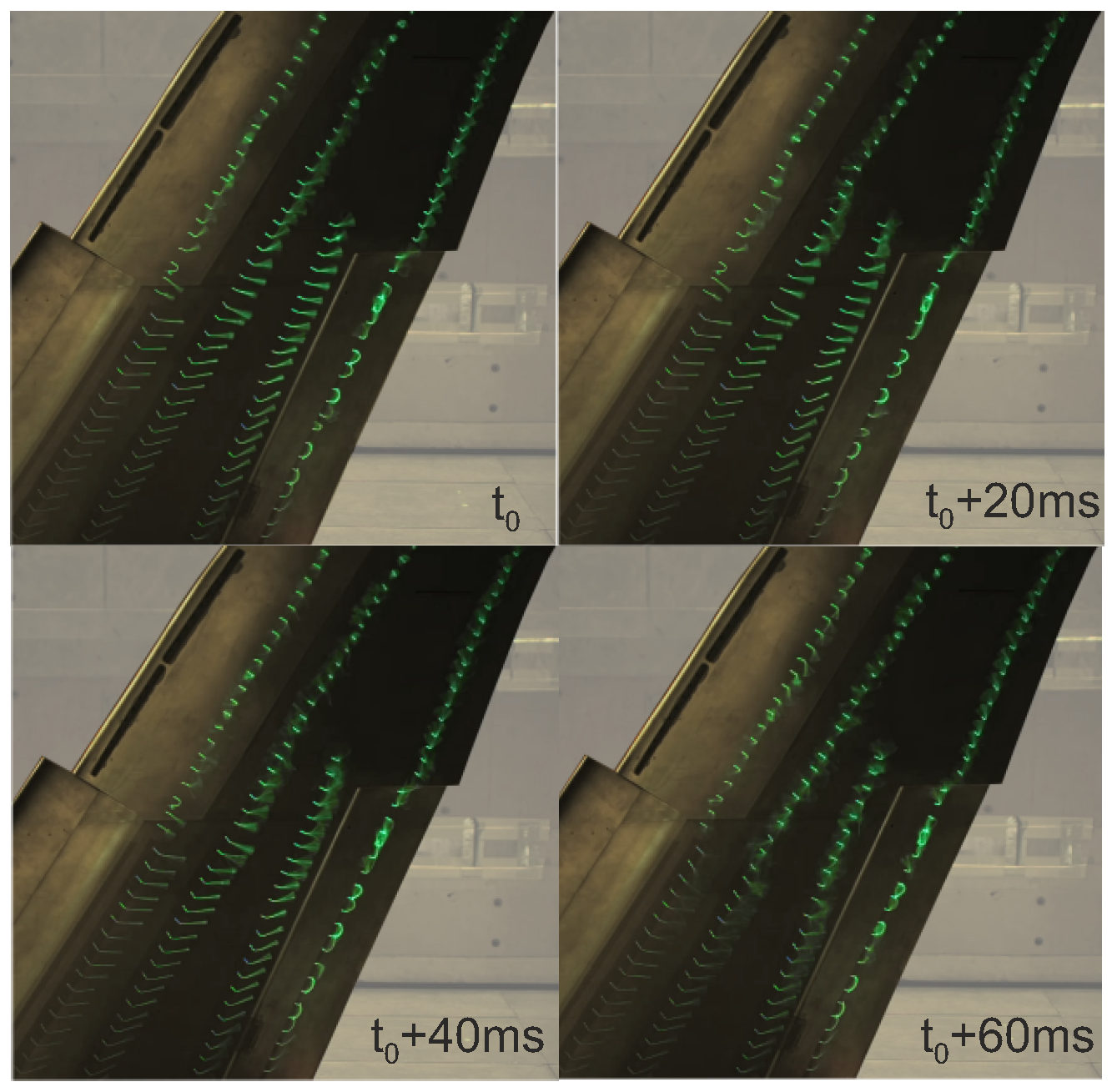
Near the active Segment S2 (as marked in the figure), we find that the suction peak is 6% larger than when S2 is inactive. This favorably affects the lift coefficient at lower angles of attack. However, the reduced pressure in this region causes increased aerodynamic loading on the model wing in this area, making it more prone to separation. Additionally, this low pressure region causes the jets emanating from the outboard Segment S3 to be attracted into this region, directing their effect away from the wing tip, where, as a consequence, separation occurs earlier. This observation is confirmed in tuft flow visualization (data not shown).
3.3.2. Effect of AFC on Model Wake Flow
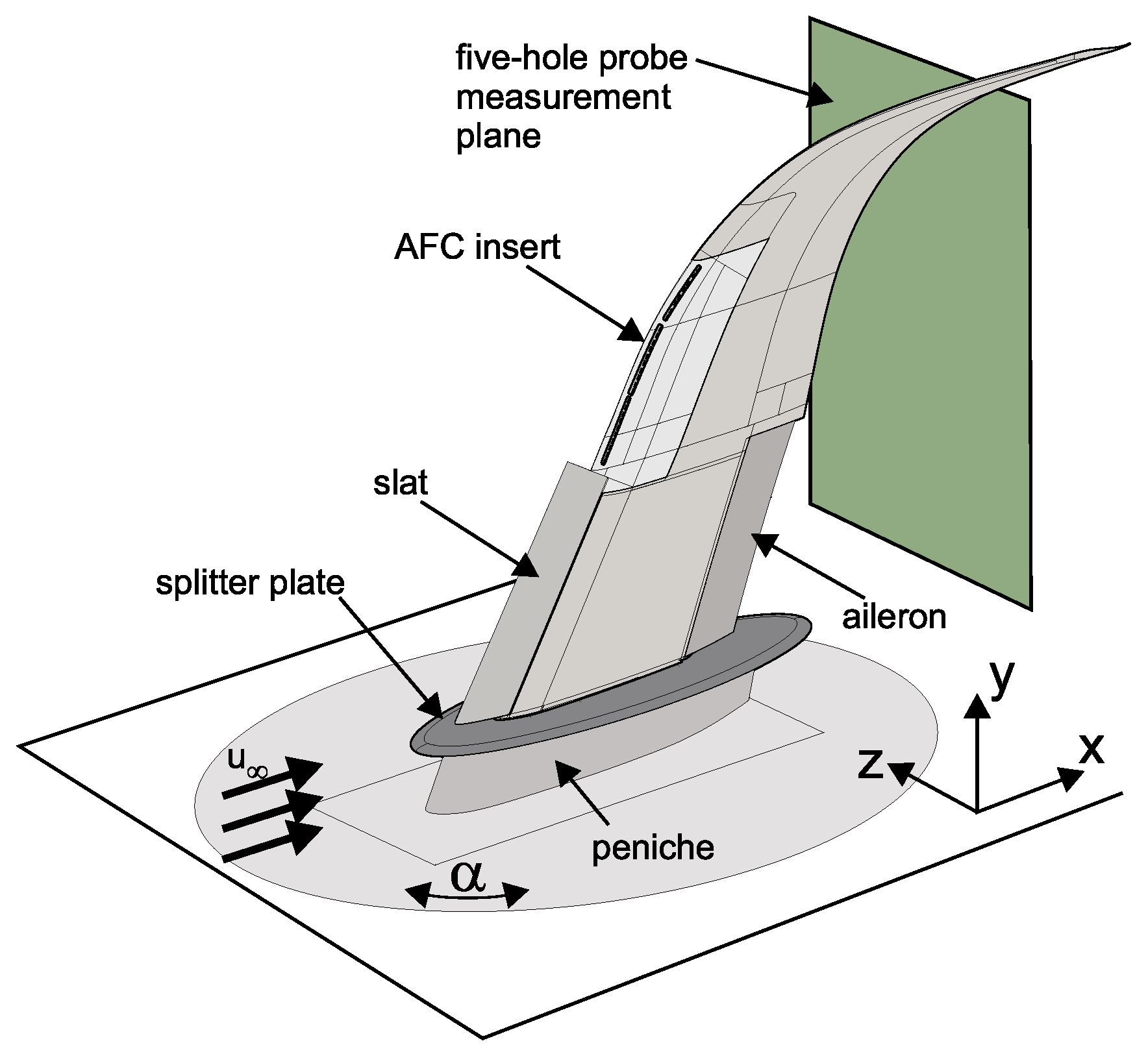
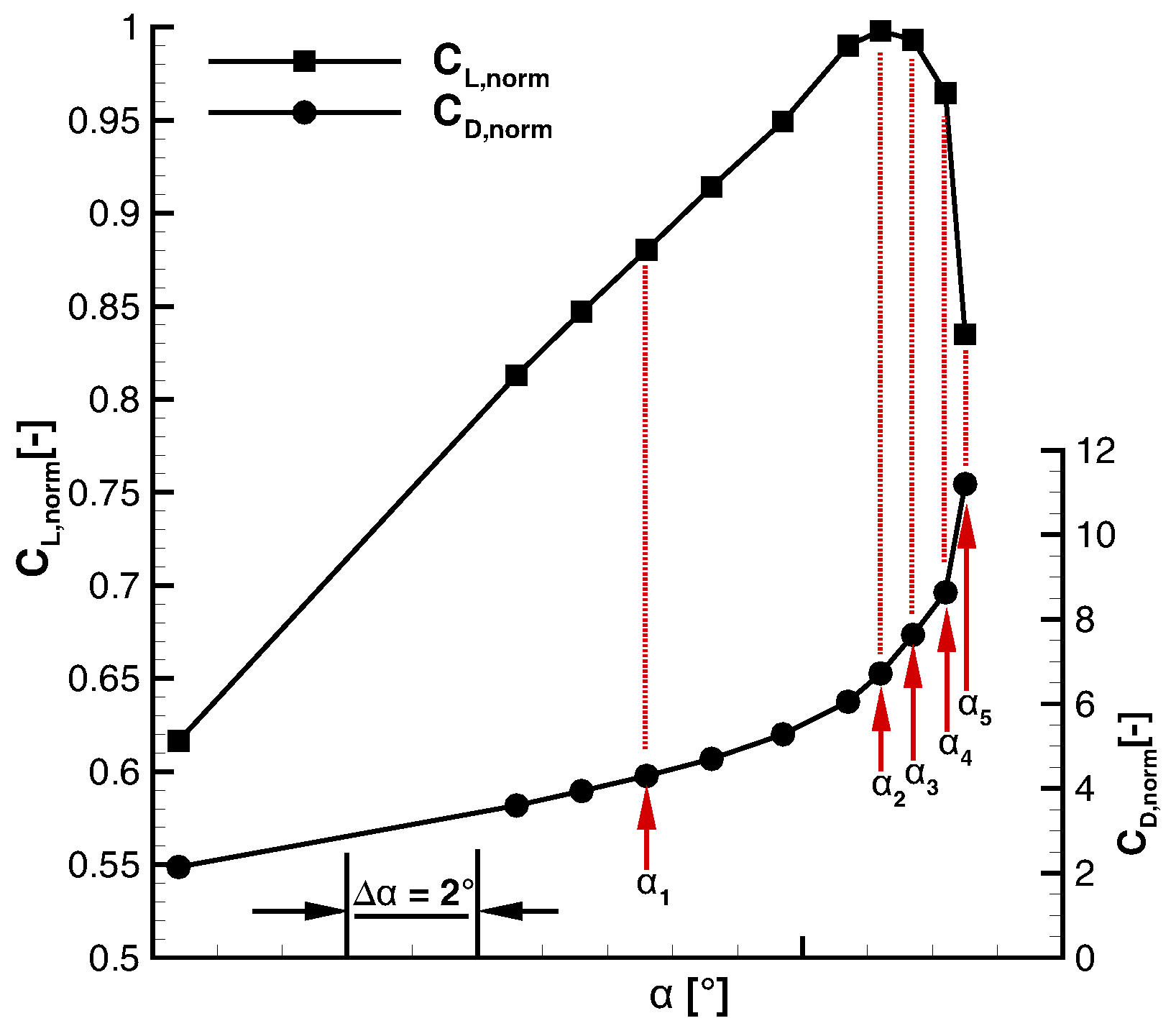
A traversable five-hole probe rake was used to quantify the effect of flow control on the wake flow of the outer wing model to gain insight into how the changes are spatially distributed in the flow field. The flow conditions for two incidence angles (marked in
Figure 14) are evaluated. The plots show the Mach number (normalized by the incidence Mach number) measured in the plane of the rake together with the vectors for the velocity components in the
y and
z directions observed from a downstream position looking upstream.
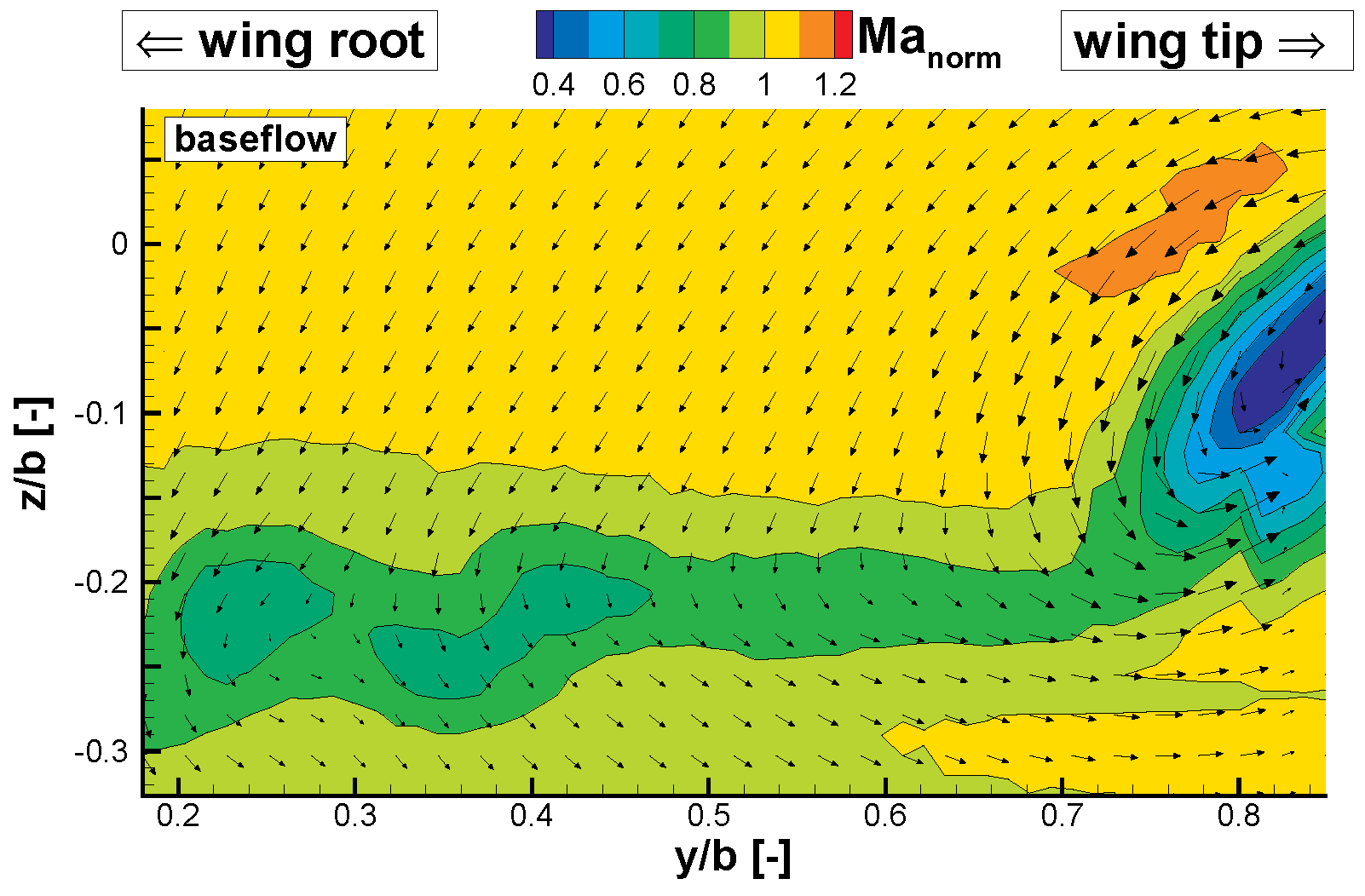
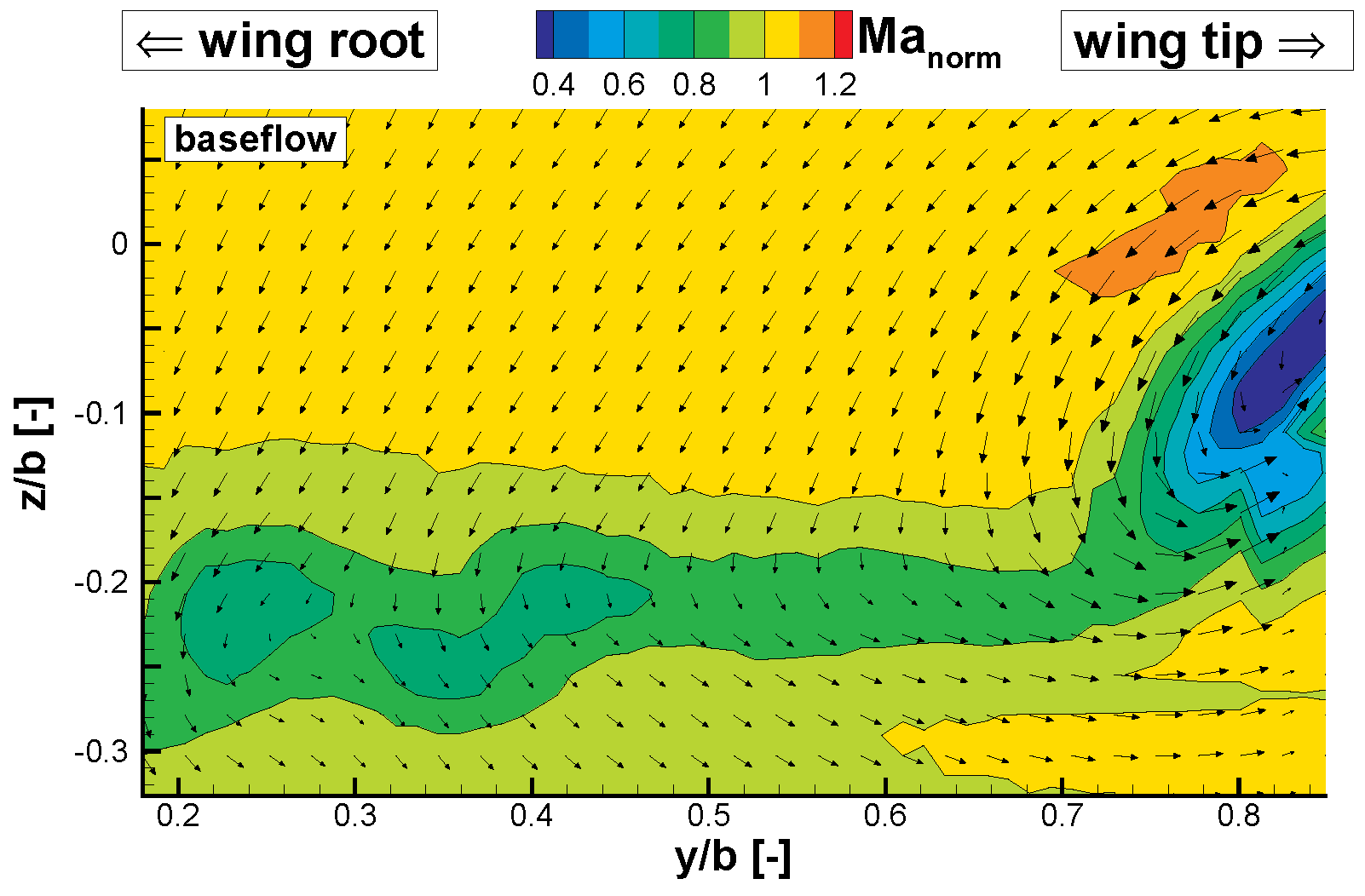
First, the data for an angle of attack of (
) are presented, at which a significant drag reduction of more than 20% is noted, although the baseline flow is not fully separated yet. The results for the uncontrolled flow are shown in
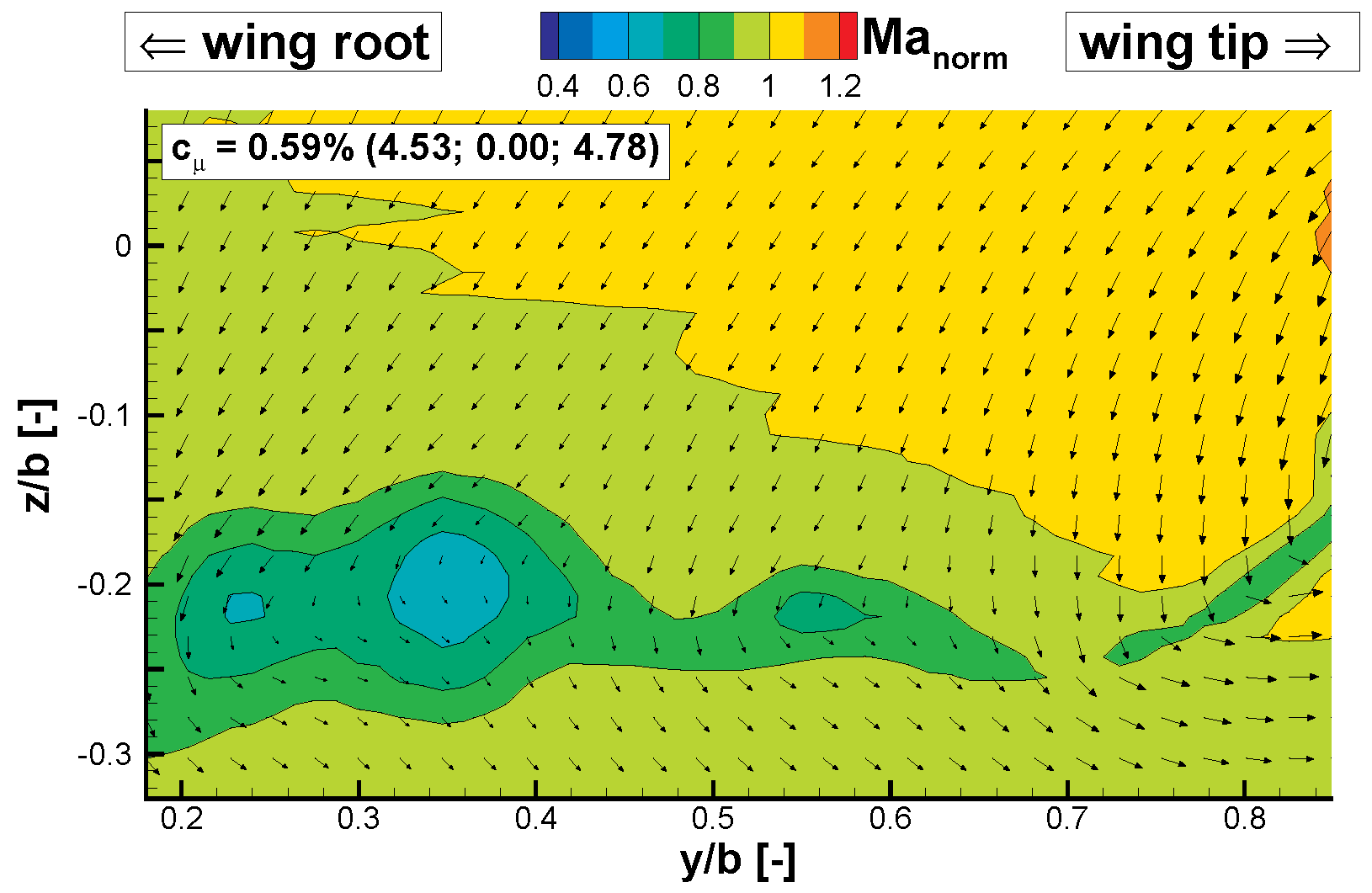
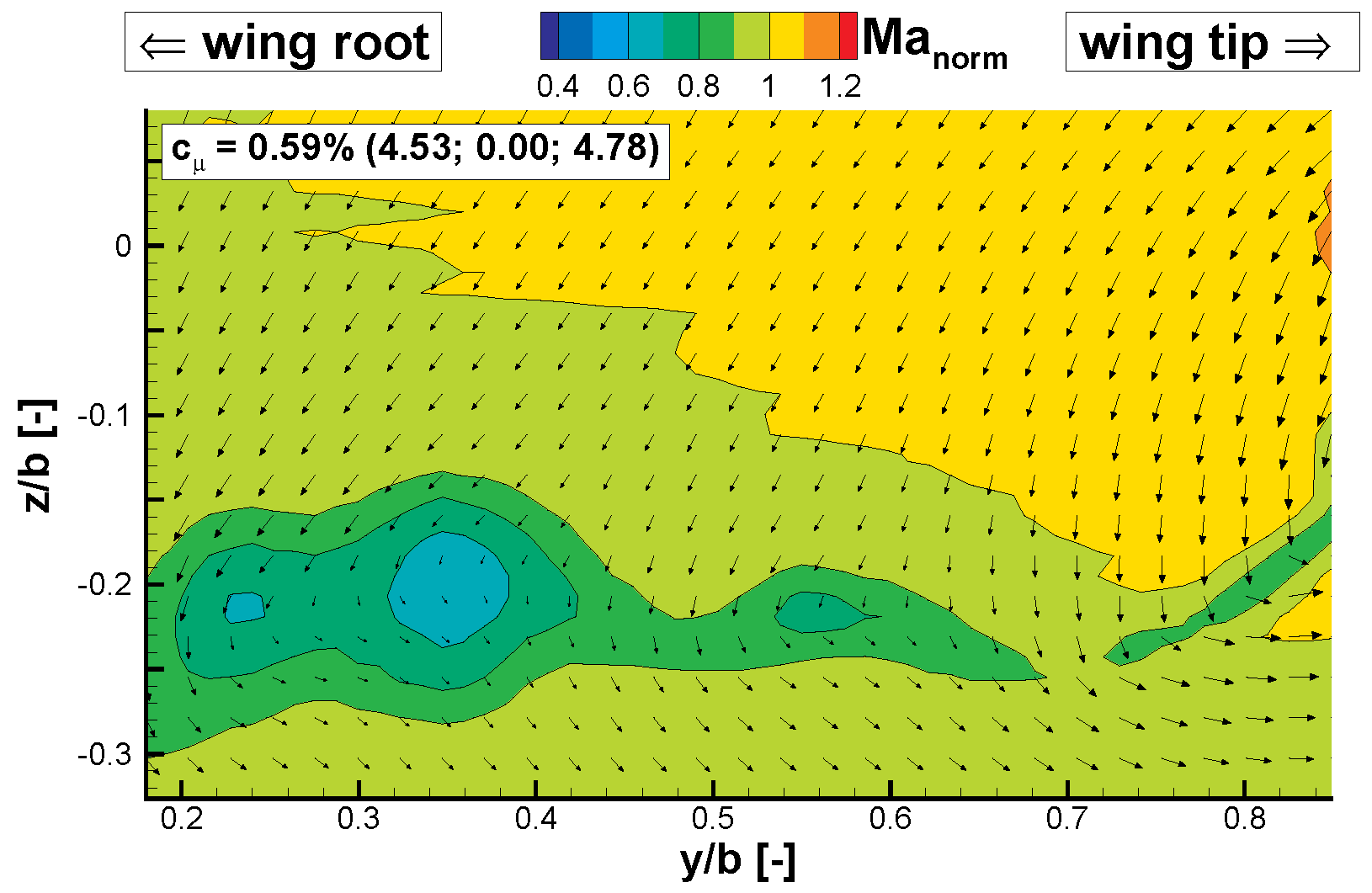
Figure 21. Here, the most prominent feature is the large vortical structure formed at the wing tip by flow separation. It manifests as a region of low velocity, highly rotational flow motion in the wake field and low static pressure (pressure data not shown) at its center. Flow control can completely suppress the separation on the wing tip, as is apparent from
Figure 22. The velocity losses associated with the onset of trailing edge separation on the entire span are reduced, and the slat edge vortex (at
) is more defined in the case of controlled flow. Note that the magnitude of the cross-flow component directed outward (positive
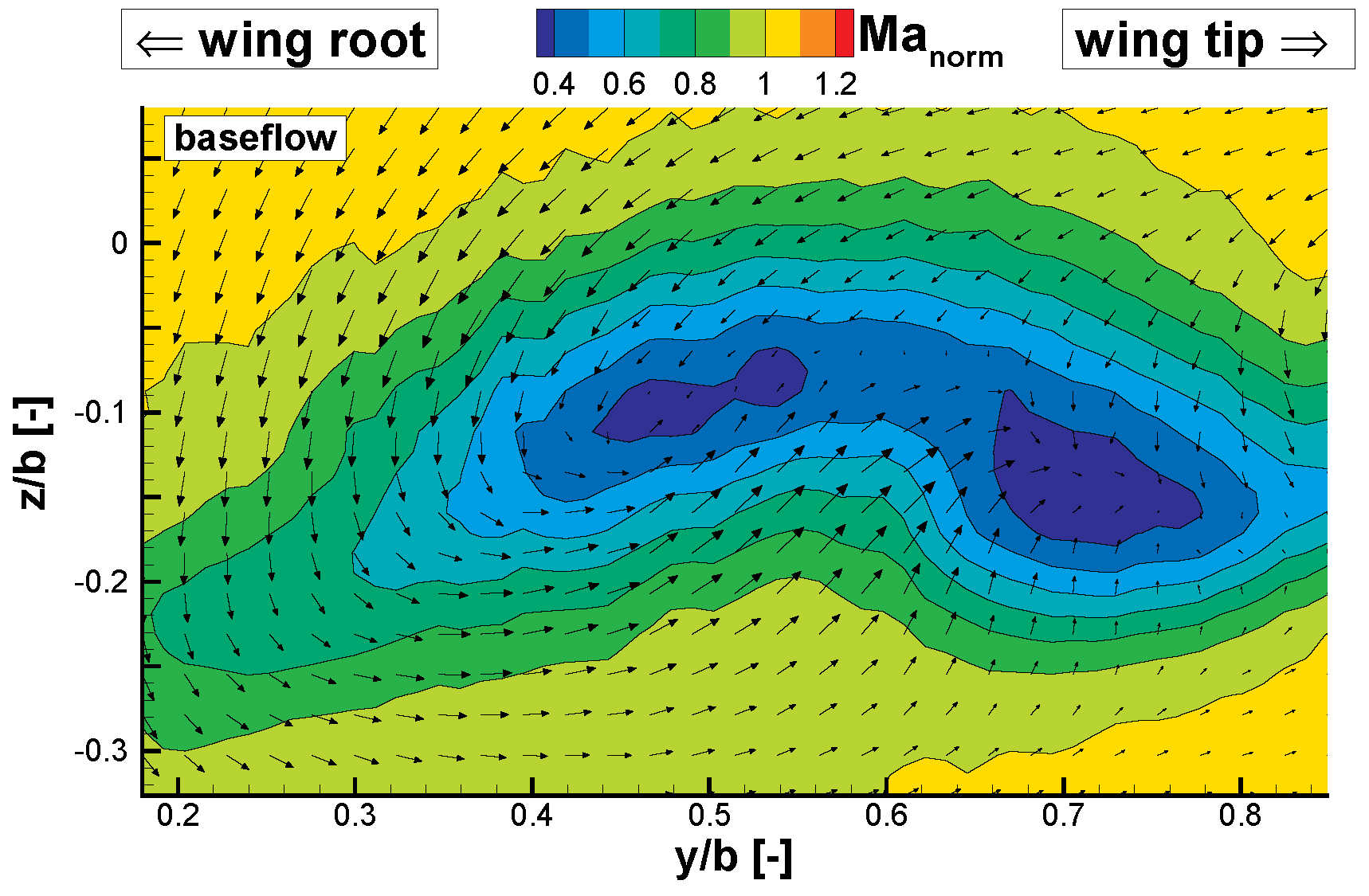
y direction) is also reduced when forcing is applied. A second set of data is presented for an incidence close to the maximum angle of attack of the controlled flow (
). For the base flow (see
Figure 23), a massive separation is observed downstream of the model where no slat is installed, accompanied by extensive velocity losses (down to 30% of the incidence velocity). The downwash normally produced by the lifting surface is replaced in parts by upwash, reflecting the shedding of vortices at the leading and trailing edges of the wing model.
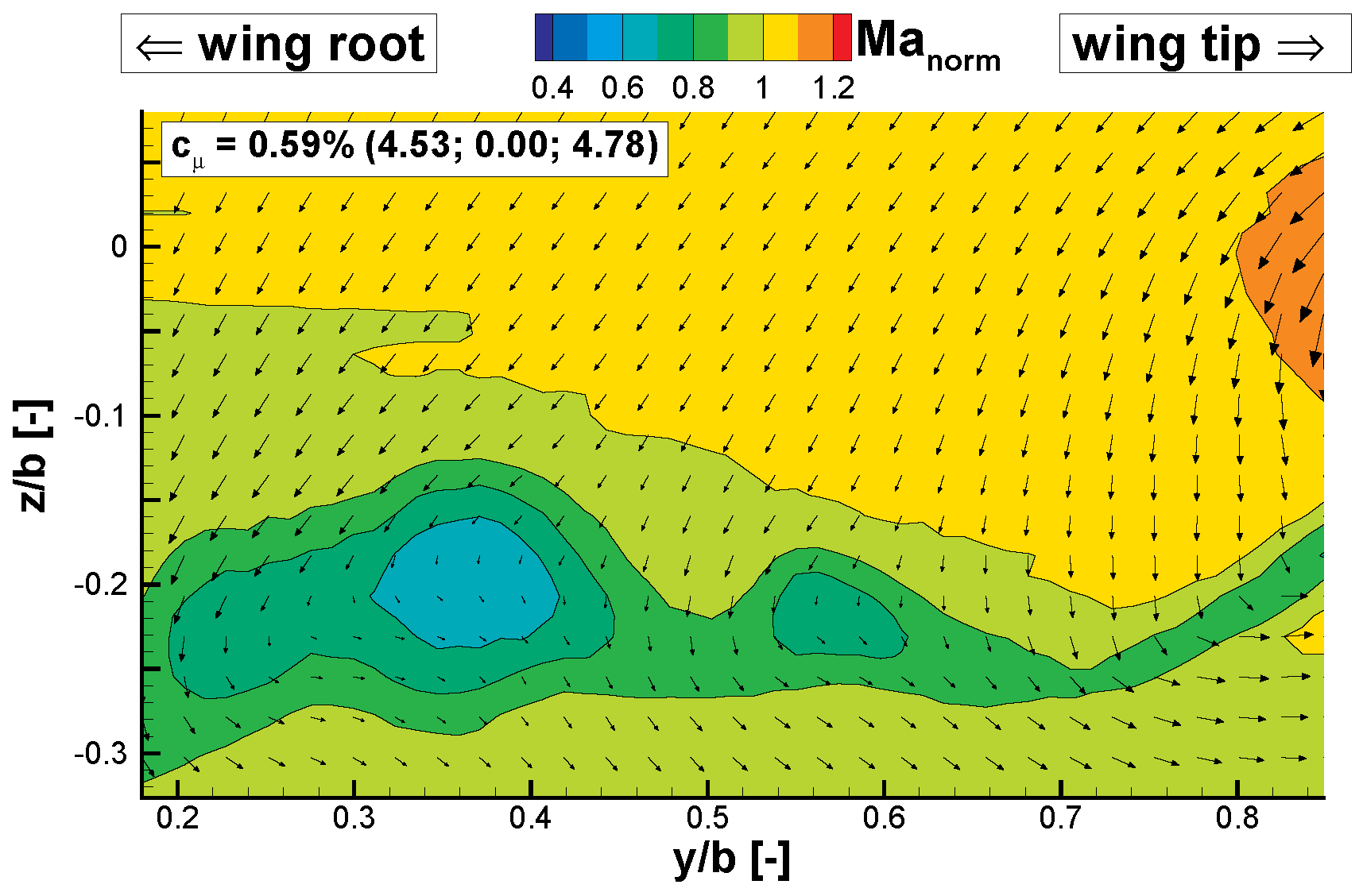
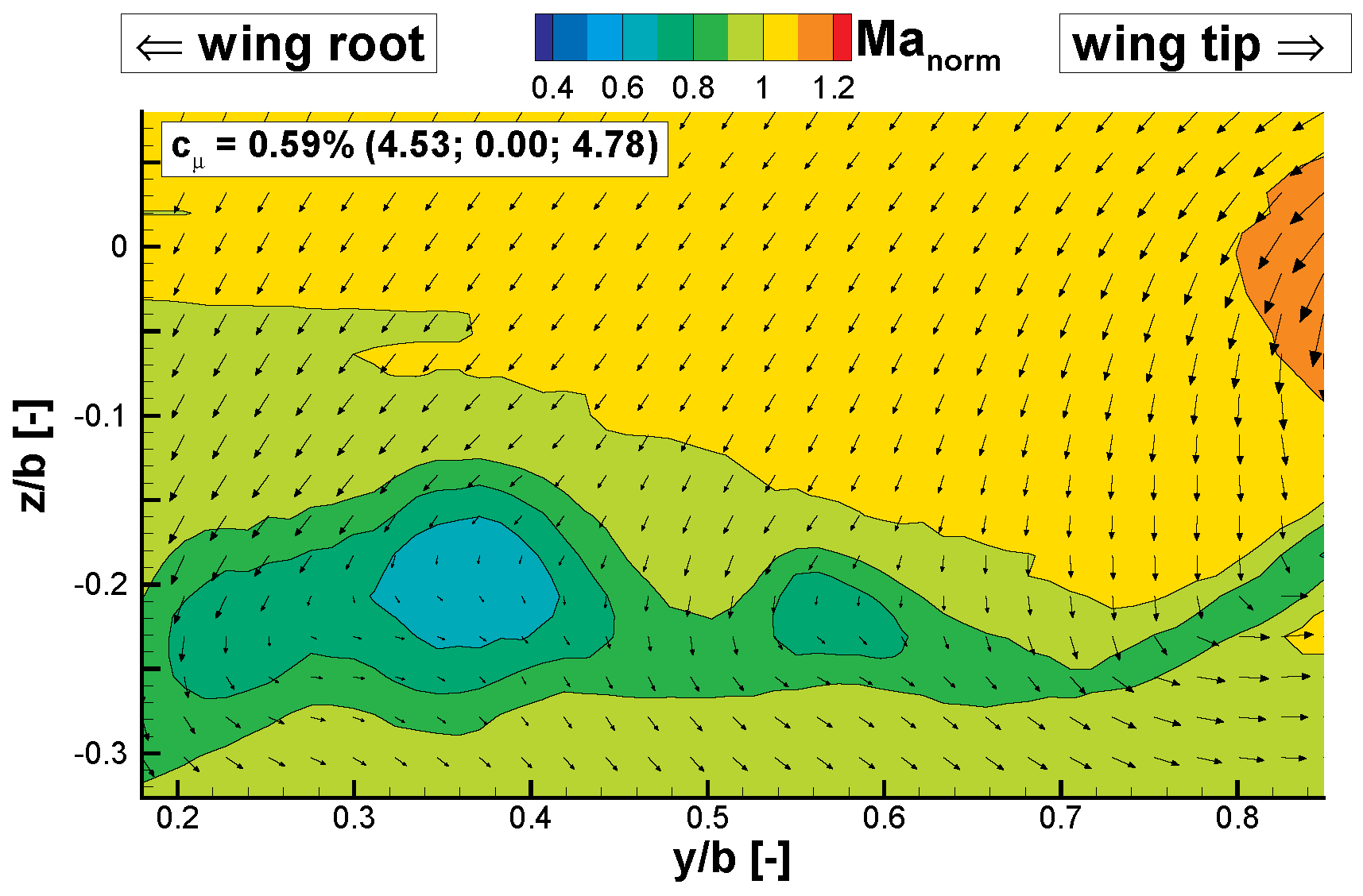
In comparison, the wake flow measurements for the controlled flow, shown in
Figure 24, illustrate the ability of AFC to stabilize the flow on the wing and to suppress separation completely. The large region of high velocity losses is reduced to the size commonly found downstream of the trailing edge of a wing. Now, the highest magnitude of the velocity deficit is found in the center of the slat edge vortex and its associated secondary vortex (at
) and downstream of the location of (inactive) Segment S2. It is noteworthy that the (controlled) flow structure at this high angle of attack closely resembles that shown at lower incidence angles, differing mainly in the size of the slat-edge-induced velocity deficit, although the wing is very close to stall.
3.3.3. Consideration of Flow Control Efficiency
To conclude the analysis of the effect of flow control on the aerodynamic performance, we focus on the efficiency of our flow control approach. To quantify this, we employ the first aerodynamic figure of merit (AFM1), as introduced by Seifert [
20]. It is defined as:
L and
D are the integral (balance-measured) values of the lift and drag, respectively, and
refers to the actuator power consumption. The ratio in the denominator with subscript baseline is the value for the uncontrolled flow. The jet power
of the AFC system is calculated, under the same assumptions as those for the calculation of the momentum coefficient, from the peak jet velocity and measured mass flow rate. This value is modified by a loss factor
that describes the actuator internal energy conversion efficiency to yield the flow control system power consumption
. To portray the efficiency of a more realistic actuator system, the value for the loss factor is estimated to be
, which is considered to be a conservative assumption based on previous work with this type of actuator system as reported in, e.g., [
21]. The actual energy supplied to the model AFC system was not recorded, as this value would not be representative owing to the design compromises necessary to fit the actuators into the model at wind tunnel scale (note that for the data shown, an energy conversion efficiency of approximately 3% would still produce
values greater than unity).
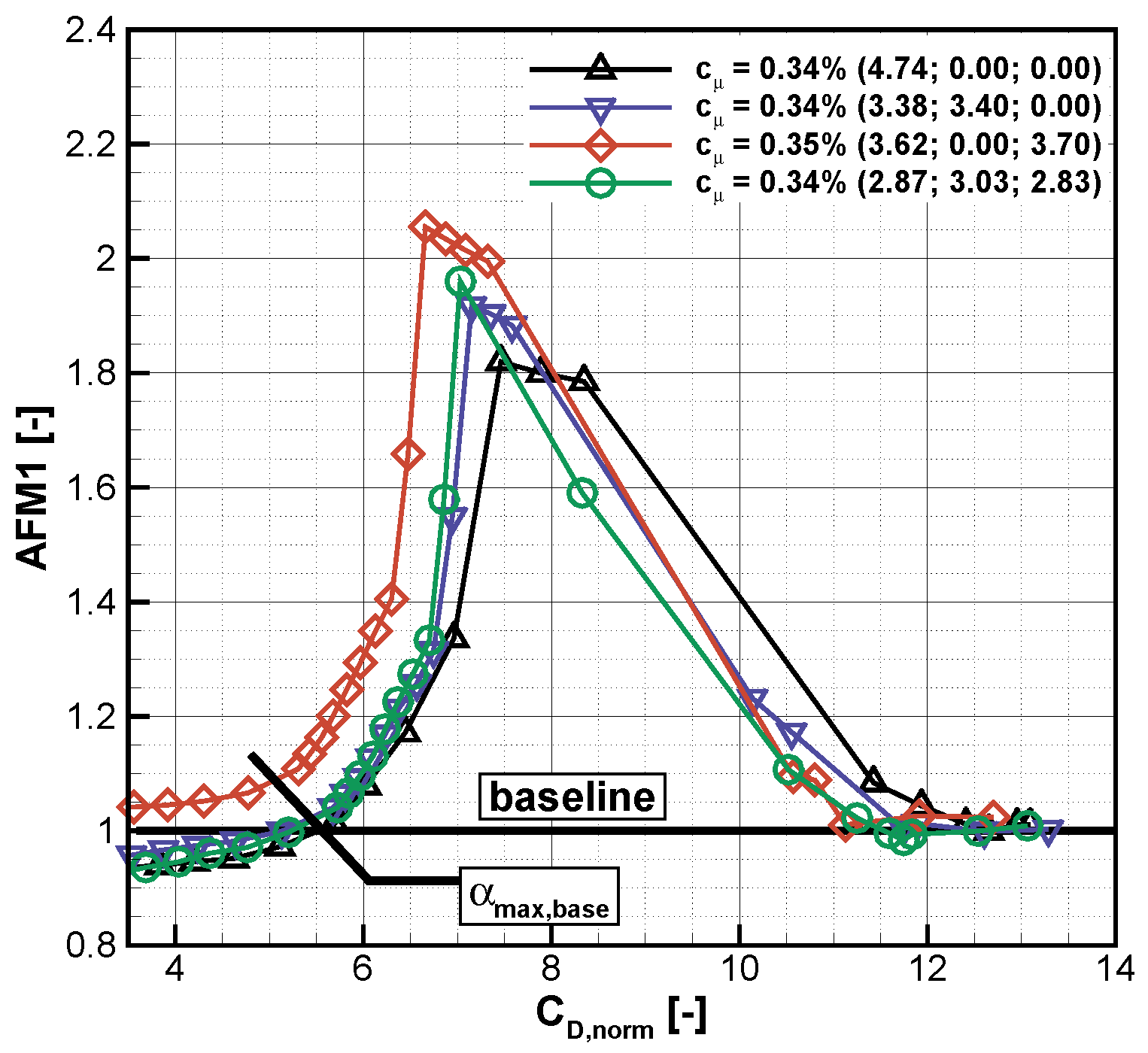
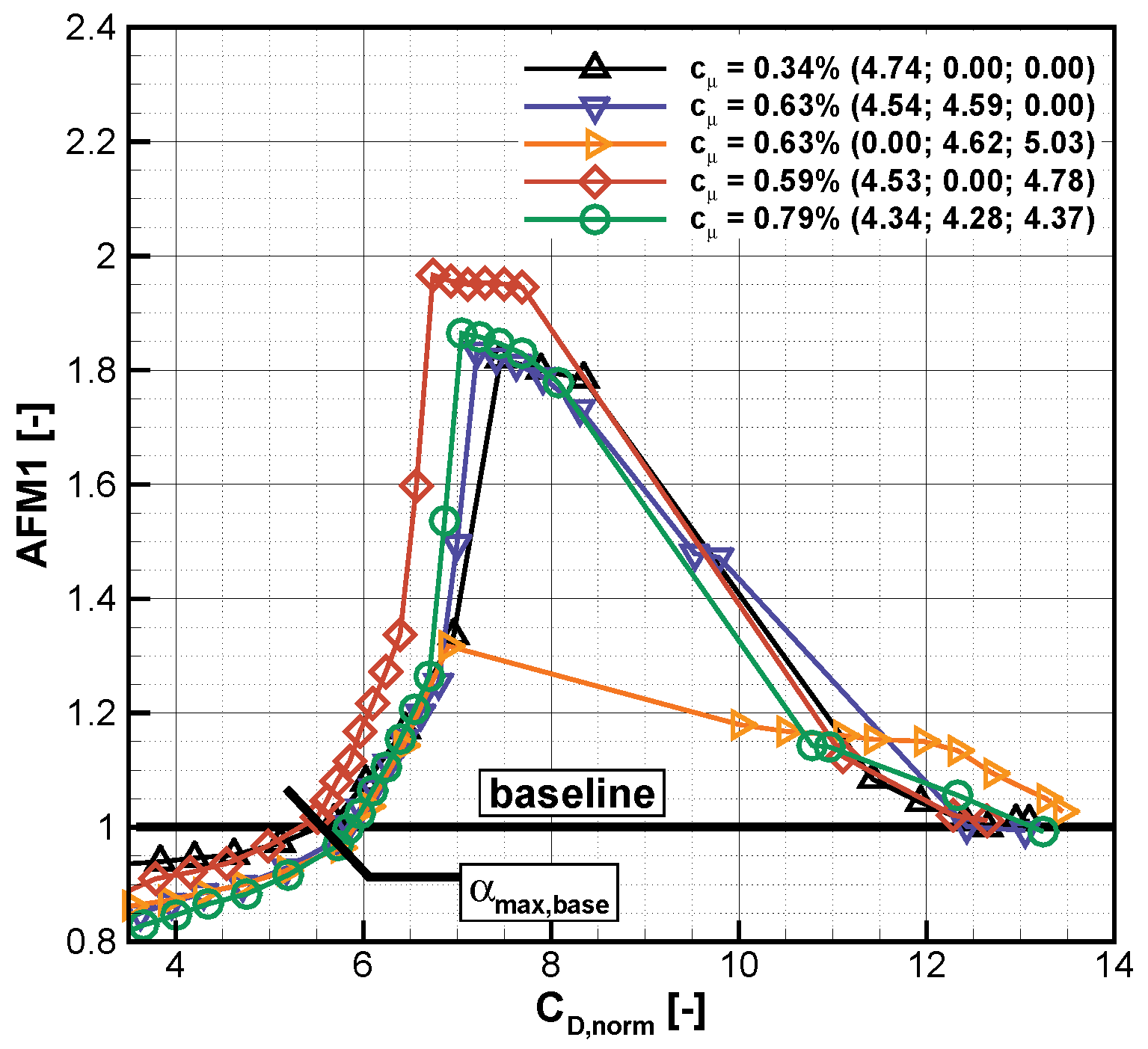
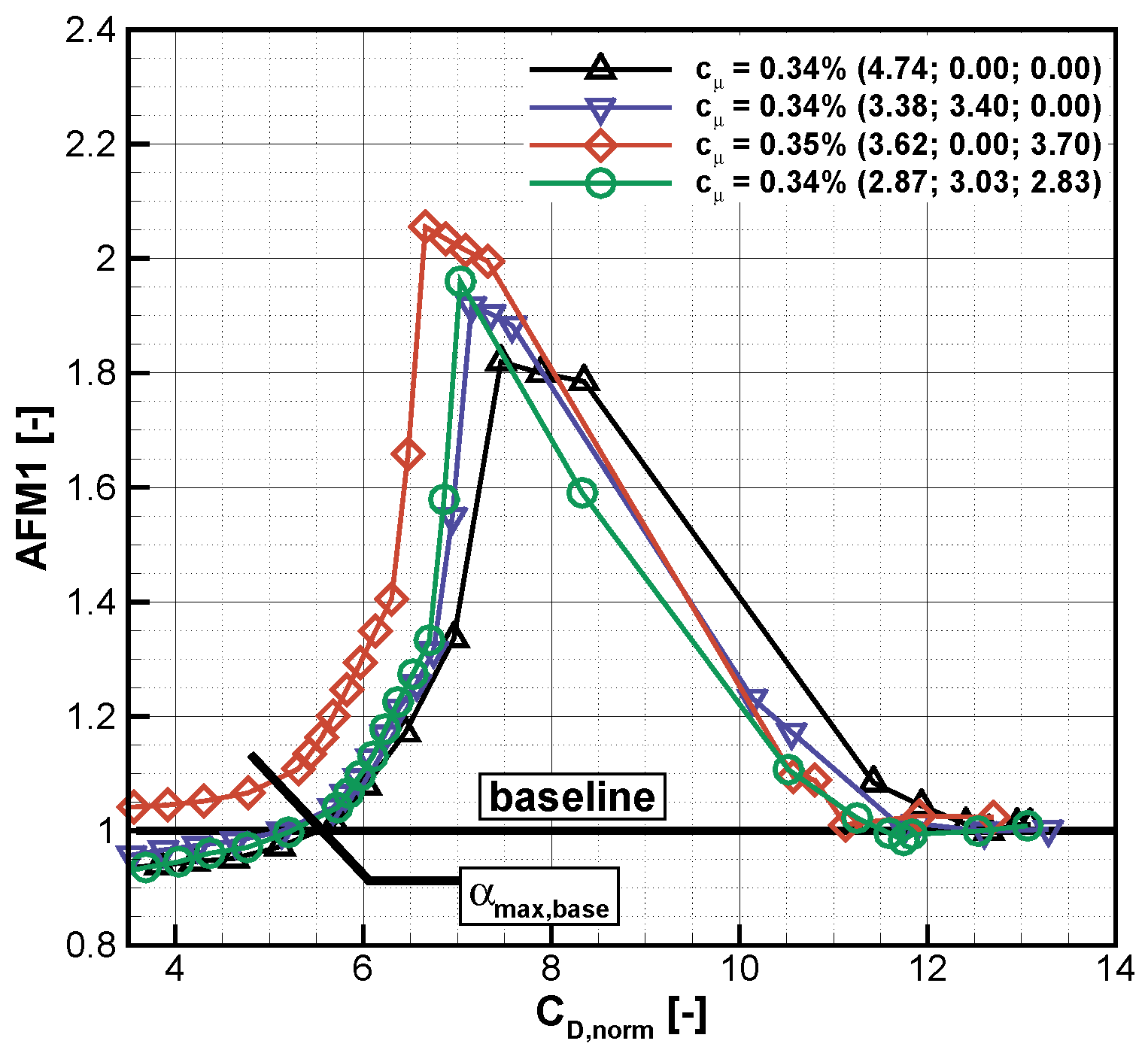
The
value for different segment combinations is plotted in
Figure 25 for a constant jet velocity ratio of
and in
Figure 26 for a constant total momentum coefficient of
.
values larger than unity reflect efficient use of the energy supplied. Three distinct regimes can be identified. For low drag coefficient values, which correspond to low angles of attack, the flow is attached naturally to the wing, and the lift increase produced at those incidences does not warrant the efficient use of flow control, as indicated by
values smaller than unity. At incidence angles where the flow is kept attached only because of flow control, all of the combinations of segments tested produce
values larger than unity. The peak values, however, depend largely on the combination of segments chosen. For a similar momentum coefficient and jet velocity ratio, forcing with Segments S2 and S3 combined yields
, whereas the combination of Segments S1 and S3 combined produces
. A comparison of the curves for the combination of S1 and S3 in
Figure 25 and
Figure 26 shows that lowering the forcing amplitude to a certain degree increases the
value (
⇒
), indicating a more efficient use of energy, but the effectiveness is reduced. Once the flow separates from the wing, despite the attempt at flow control, the
values drop to approximately unity.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}