1. Introduction
Achieving multi-function capabilities on a low-cost airborne radar system platform has been difficult, since a low-cost radar usually does not have the quality of electronics, antenna and computing power to support advanced capabilities. However, the need for low-cost radar sensors is imperative in many areas. For example, the airborne radar on unmanned aerial vehicles (UAVs) needs to address extreme constrains on cost, space, weight and power (C-SWaP). On the other hand, unmanned aircraft still need similar (maybe more autonomous) capabilities for situation awareness compared to their manned counterparts [
1]. With these challenges, there are two possible paths for the solution. One is developing higher frequency, lower cost and agile hardware, such as a metamaterial scanner [
2], similar to the hardware in automobile radars [
3], etc. The drawback of implementing these new hardware changes is the requirement of aircraft recertification in addition to complications that arise during the radar configuration modifications. The other path is using existing certified hardware, such as low-cost weather radars, while trying to enhance the functionalities by mainly using advanced signal processing. Because the enhancements are done in software, there is little or no need to modify existing hardware, thereby reducing the development costs and certification risks. This specific study focuses on the second path of the solution where the signal processing algorithms are developed and applied. The biggest challenge of this path is the constraint of the aperture size and scanning speed of existing low C-SWaP radars. In this study, the specific commercial weather radar platform used is the GWX™/GSX™ [
4,
5] airborne radars from Garmin International, Olathe, KS, USA.
Table 1 lists the key system parameters of this platform. We would like to verify if the signal processing algorithms can enhance the performance of this kind of system to meet the detection and avoid (DAA) radar sensing requirements [
6] or at least support the basic functionality of DAA operations as part of multi-mission operations. Also note that, although there have been FAA, RTCA (Federal Aviation Administration, Radio Technical Commission for Aeronautics) working groups actively investigating the DAA/sense and avoid (SAA) radar sensing requirements [
7], the final performance requirements have not yet been finalized and released. This work has been focused on adding a basic DAA function to existing weather radar functions, rather than proposing a completely new dedicated DAA radar system.
Currently, SAA/DAA radars are under development from multiple industry entities, such as the due regard radar from General Atomics [
8], Northrop Grumman’s SAA radar and initial flight tests [
9]. As far as we are aware of, these on-going works have not addressed the multi-functional application for low-cost X-band radar operations, as well as the scenario of close-by multi-target tracking with angular resolution constraints. The innovative aspect of this work is the first time integration and application of some advanced algorithms for DAA/SAA functions on a low-cost airborne weather radar platform. The overall system configuration is called polarimetric airborne radar operating at X-band—Generation 1 (PARADOX1). PARADOX1 uses a single vertically-polarized antenna in current configurations, while in the future, it will have simultaneous dual-polarization capability.
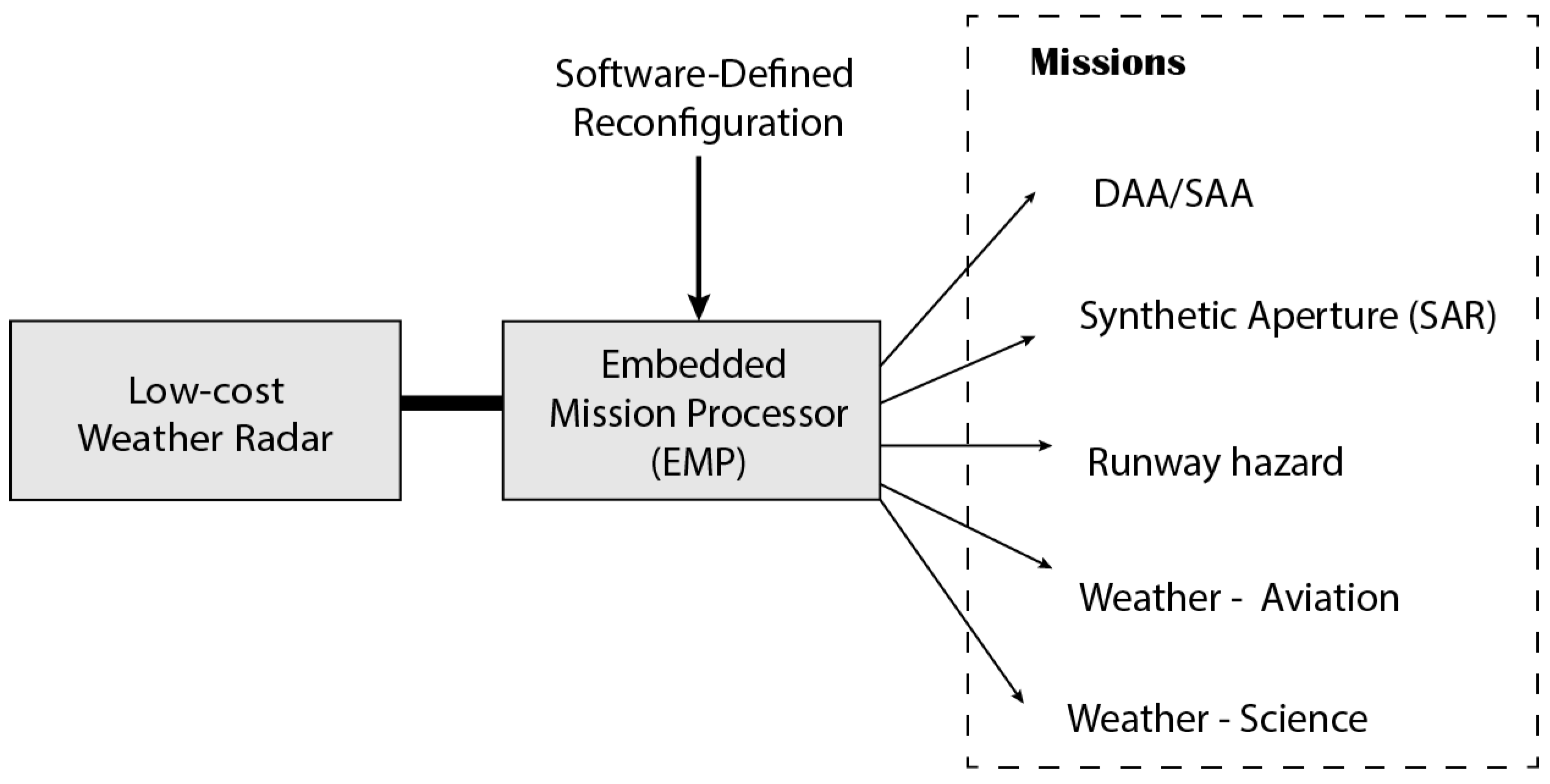
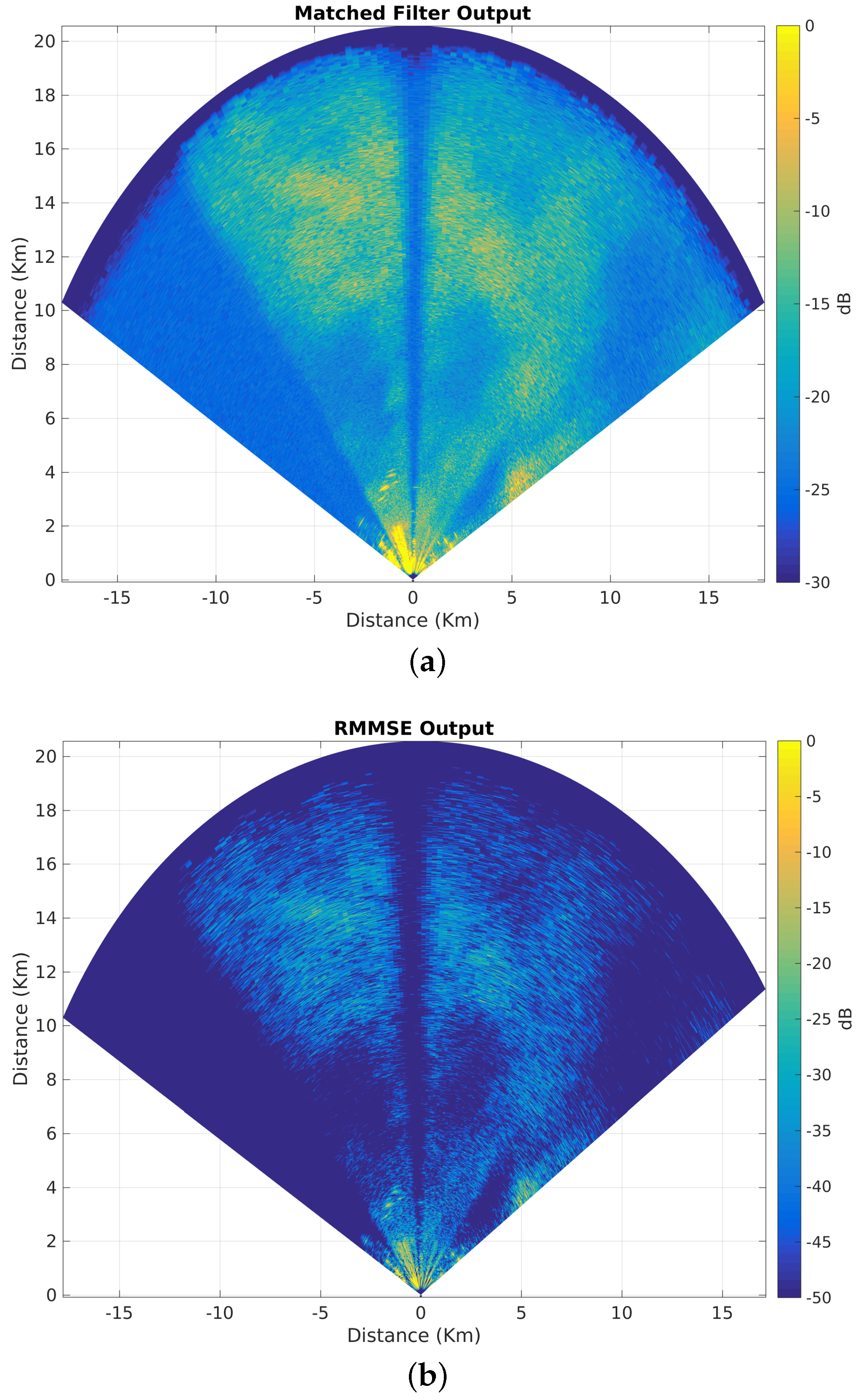
Figure 1 depicts the multi-mission concept of PARADOX1. The embedded mission processor can be configured to simultaneously execute various missions. The DAA tracking part, naturally, needs to be in track while scan (TWS) mode. Signal processing modules can be attached to the data output of PARADOX1 to achieve improvements, such as super-resolution (SR), range/azimuth/Doppler enhancement, sidelobe reduction, etc. The first significant processing module is the range-Doppler-azimuth super-resolution, which is an important step required to meet the functionality performance goals. Currently, the reiterated minimum mean square error (RMMSE)-based [
10] deconvolution algorithm is applied for the azimuthal SR, and the matched filter-based iterative adaptive approach (MF-IAA) algorithm is developed for range-Doppler SR. To support real-time performance, all of the SR processing is performed after pulse compression. The target detection is based on a simple “pixel centroid” extraction from enhanced pulse compression outputs, and tracking of multiple collision hazards is implemented through the Kalman filter and joint probabilistic data association (JPDA). The end-to-end processing chain is validated through both simulations and measurements. Another novel aspect is demonstrating the simultaneous monitoring of weather and air-traffic targets through the same aperture and the same signal processing chain, which is also tested through measurements.
This paper is organized as follows:
Section 2 provides more details of the DAA mission processor and the design of the complete processing flow.
Section 3 focuses on real-aperture imaging processing and the super-resolution (SR) algorithm in the range-azimuth direction.
Section 4 discusses the importance of the range and Doppler SR and the specific algorithms to achieve them.
Section 5 provides details in the DAA tracking processing. Test results and field experiment results are introduced in
Section 6. The summary and expectations for future development are provided in
Section 7.
4. Range-Doppler Enhancement
In most radar systems, multiple pulses are transmitted and received. The relative phase difference between the received pulses can be used to calculate Doppler frequency and consequently the radial velocity of remote targets. The span of Doppler frequency that can be measured depends on the pulse repetition frequency (PRF) of the transmitted train of pulses, while the resolution of Doppler frequency is determined by the number of transmitted pulses. Doppler resolution can be defined as the minimum difference in Doppler frequency that can be discriminated or resolved. Hence, transmitting more pulses results in a better Doppler resolution, i.e., more precise measurement of target radial velocity can be made. However, transmitting more pulses leads to slow scan time. MF-IAA has been shown to increase the Doppler resolution by as much as ten times [
12]. MF-IAA is a user parameter-free, iterative, weighted least square-based spectral estimation algorithm. In contrast to the traditional IAA [
13,
14], MF-IAA can work directly with matched filter output, thereby eliminating disruptions in the traditional processing chain of a radar system. MF-IAA iteratively estimates the amplitude and phase of remote targets, which are RCS and Doppler frequency in the case of radars. In addition to resolution enhancement, MF-IAA also suppresses/mitigates range and Doppler sidelobes, which improves the detection of weaker targets in the vicinity of stronger targets. First, a brief derivation of MF-IAA followed by a simulation result and, finally, a measurement result will be presented.
For multiple targets (stationary and moving) and assuming no aliasing is taking place, Equation (
1) can be rewritten as [
12,
13]:
where
is the transmit waveform. Here,
denotes the complex RCS for the
l-th range bin and the
d-th Doppler bin. There are a total of
L range bins and
D Doppler bins. The matrix
is of the form:
and is a square matrix of size
N.
has one in the
n-th sub-diagonal and zeroes elsewhere.
,
and
for
. The
N continuous returned signal for the
l-th range bin from the
p-th pulse can be written as:
where
is the pulse repetition time divided by the duration of a single sub-pulse (numbers of sub-pulses within one pulse repetition time (PRT)). If the returns from the pulses
are stacked on top of each other, the returns take the form [
13]:
where
, ⊗ is the Kronecker matrix product, and
The matched filter response takes the form:
where,
Note,
here is a square matrix of size
that has ones in the
n-th sub-diagonal and zeroes elsewhere. If we let
and
, then we can write Equation (
7) as:
Equation (
9) can be solved by applying the IAA algorithm [
14]. The estimate at the
i-th iteration is:
and,
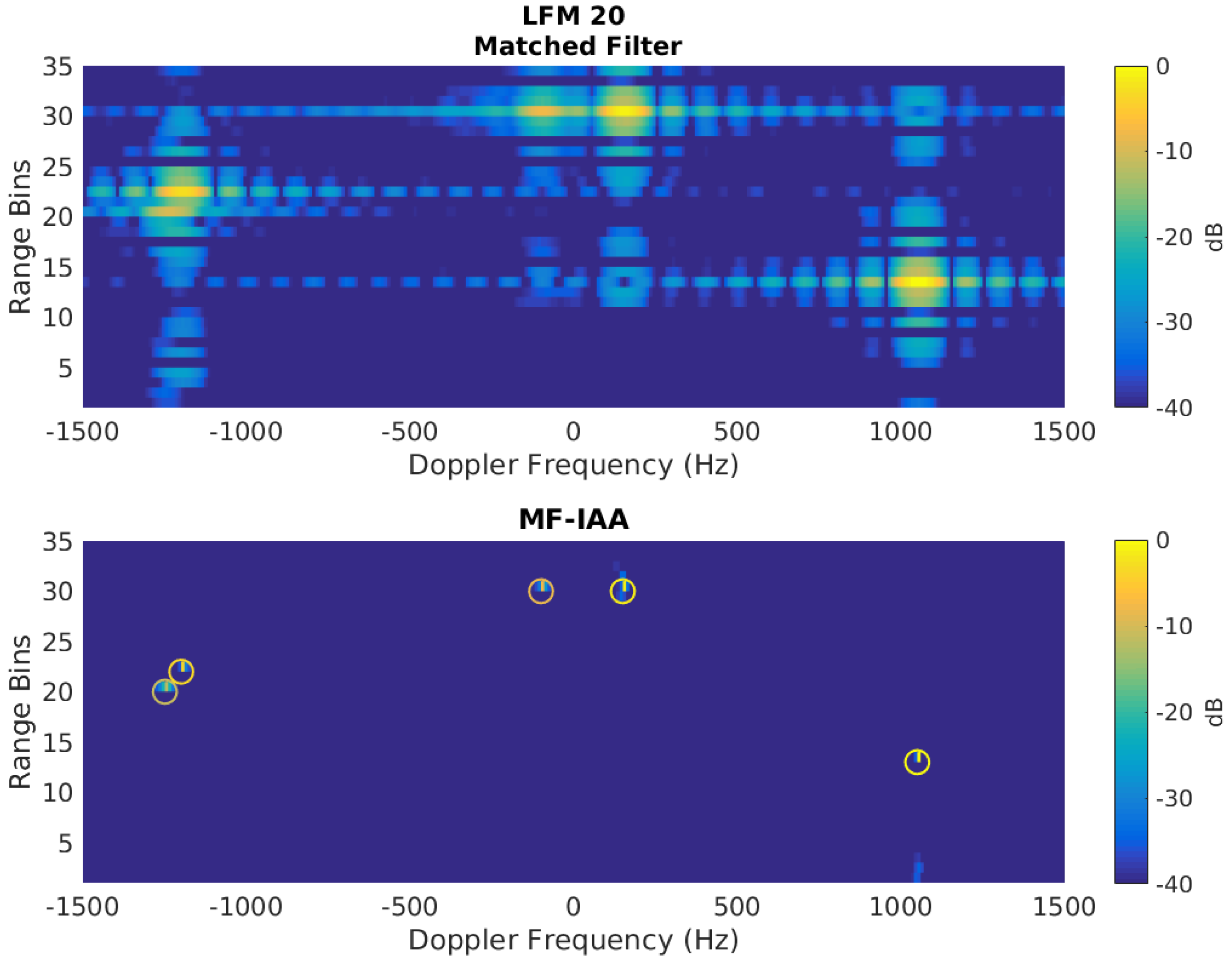
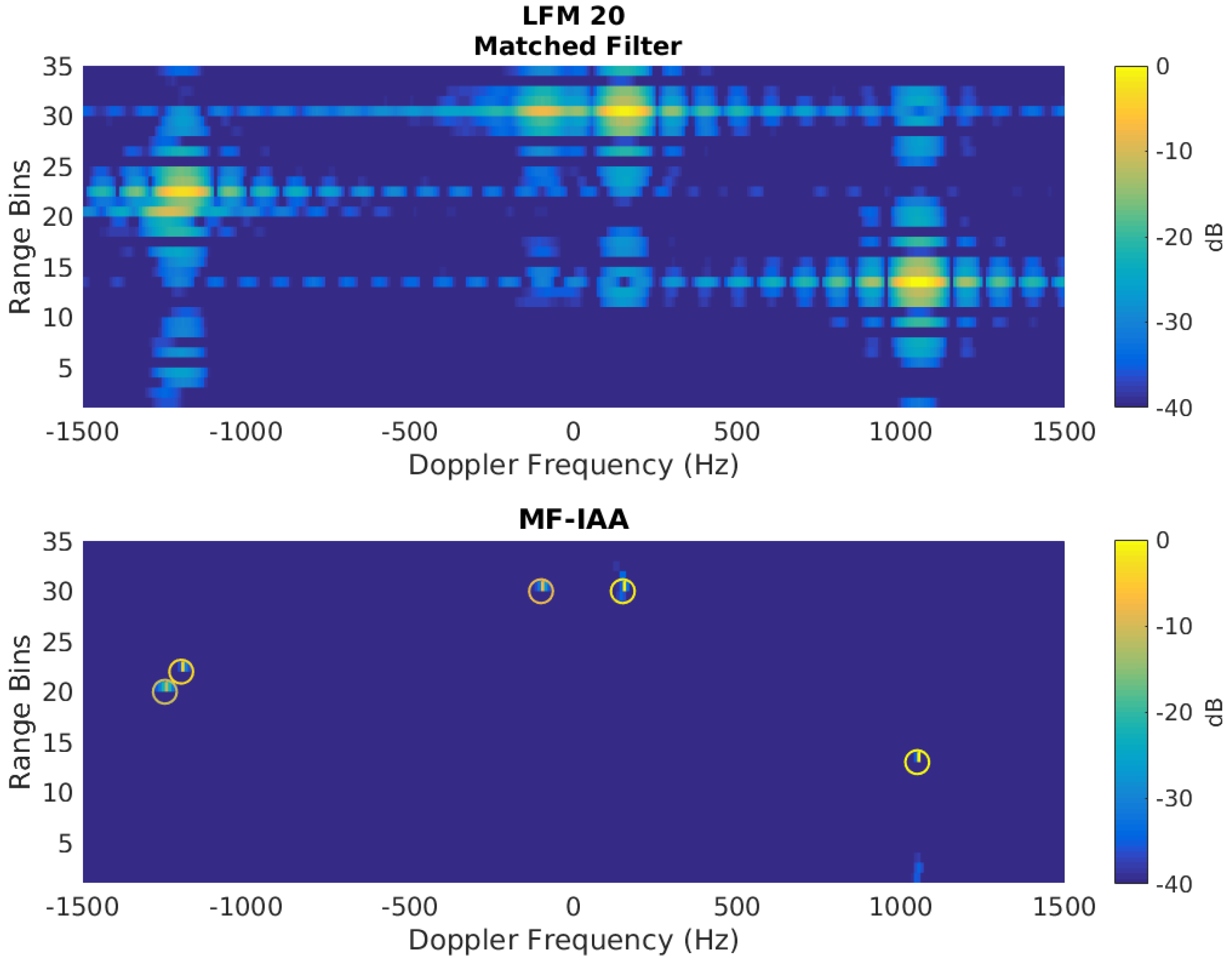
Matched filter returns are simulated to study the performance of MF-IAA. The simulated scene comprises five targets at varying ranges and Doppler frequencies. The truth for simulation is tabulated in
Table 2. For the simulation, 60 pulses are transmitted with a PRF of 6 kHz. Each pulse is a 10-
s linear frequency modulated (LFM) pulse with an 8-MHz bandwidth. The Doppler resolution for the matched filter-based range-Doppler image (RDI) is 100 Hz. The MF-IAA algorithm is applied to enhance the resolution by a factor of 10.
Figure 8 shows a comparison between RDI obtained from the matched filter outputs and MF-IAA outputs. If we look at the RDI from the matched filter (top section of the
Figure 8), there is no proper distinction of all five targets. The range and Doppler sidelobes have significantly masked nearby targets. There is no distinction between the return from a weaker target and the sidelobes of a stronger target. The bottom section of
Figure 8 shows the RDI obtained from MF-IAA outputs. The center of the circles in the figure represent the location of the ground truth, and the color of circles represents the target SNR. In MF-IAA RDI, a clear distinction between the five targets in the scene can be easily observed. In addition to removing range sidelobes, most of the Doppler sidelobes are also suppressed. The estimation of target SNR also resembles the ground truth.
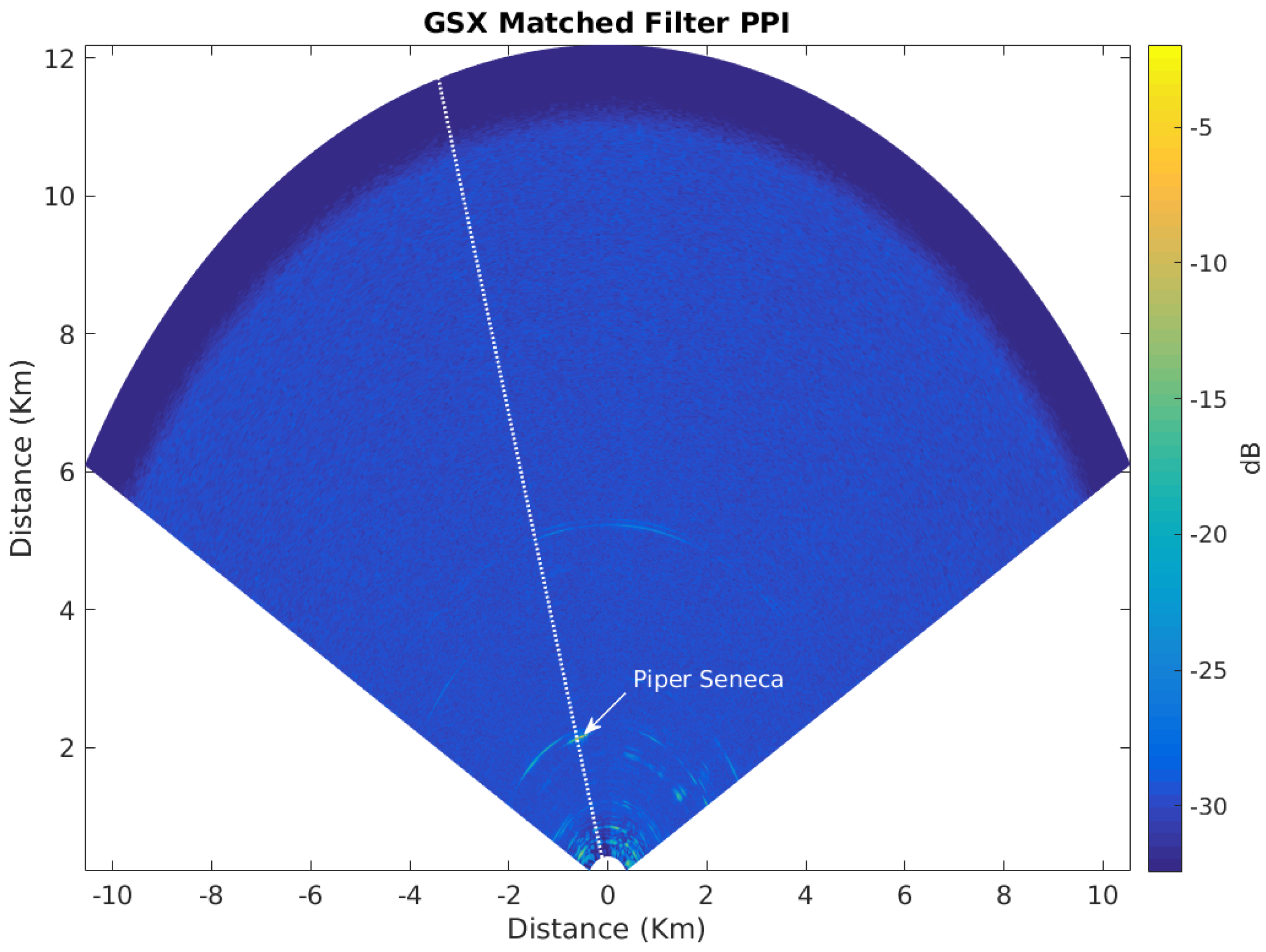
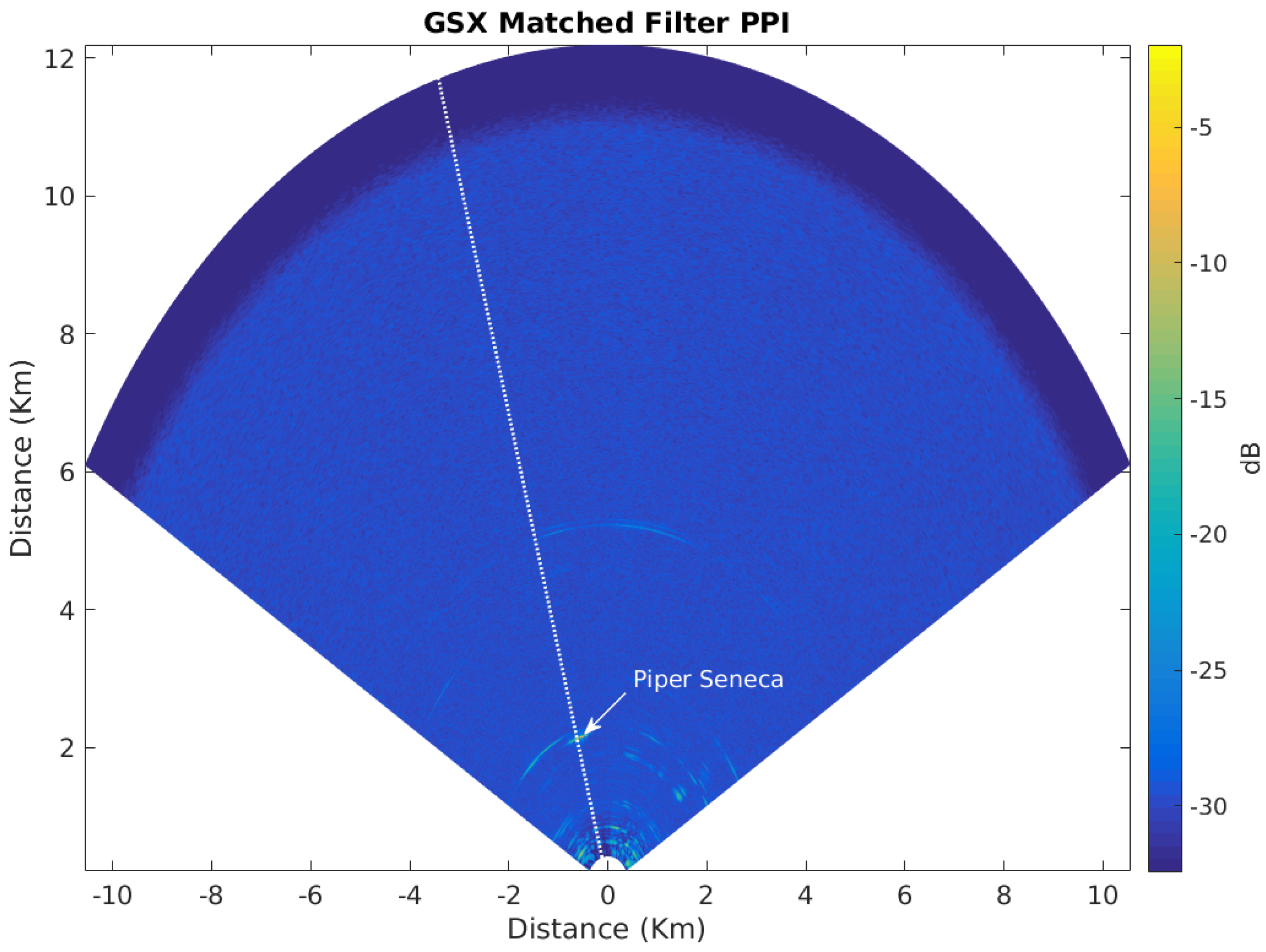
The performance of MF-IAA was also evaluated for a measured target. A twin-engined light aircraft (Piper Seneca) was flown in a predetermined path, and returns from PARADOX1 were collected. As in the simulated case, the range-Doppler image was created using matched filter outputs, which were compared with MF-IAA outputs.
Figure 9 shows the planned position indicator (PPI) output directly from PARADOX1. A single range profile (shown in the white dotted line) was extracted to generate the range-Doppler image. The Coherent Pulse Interval (CPI) consists of 20 pulses at 5 kHz PRF, resulting in a Doppler resolution of 250 Hz. Each pulse was 6.83
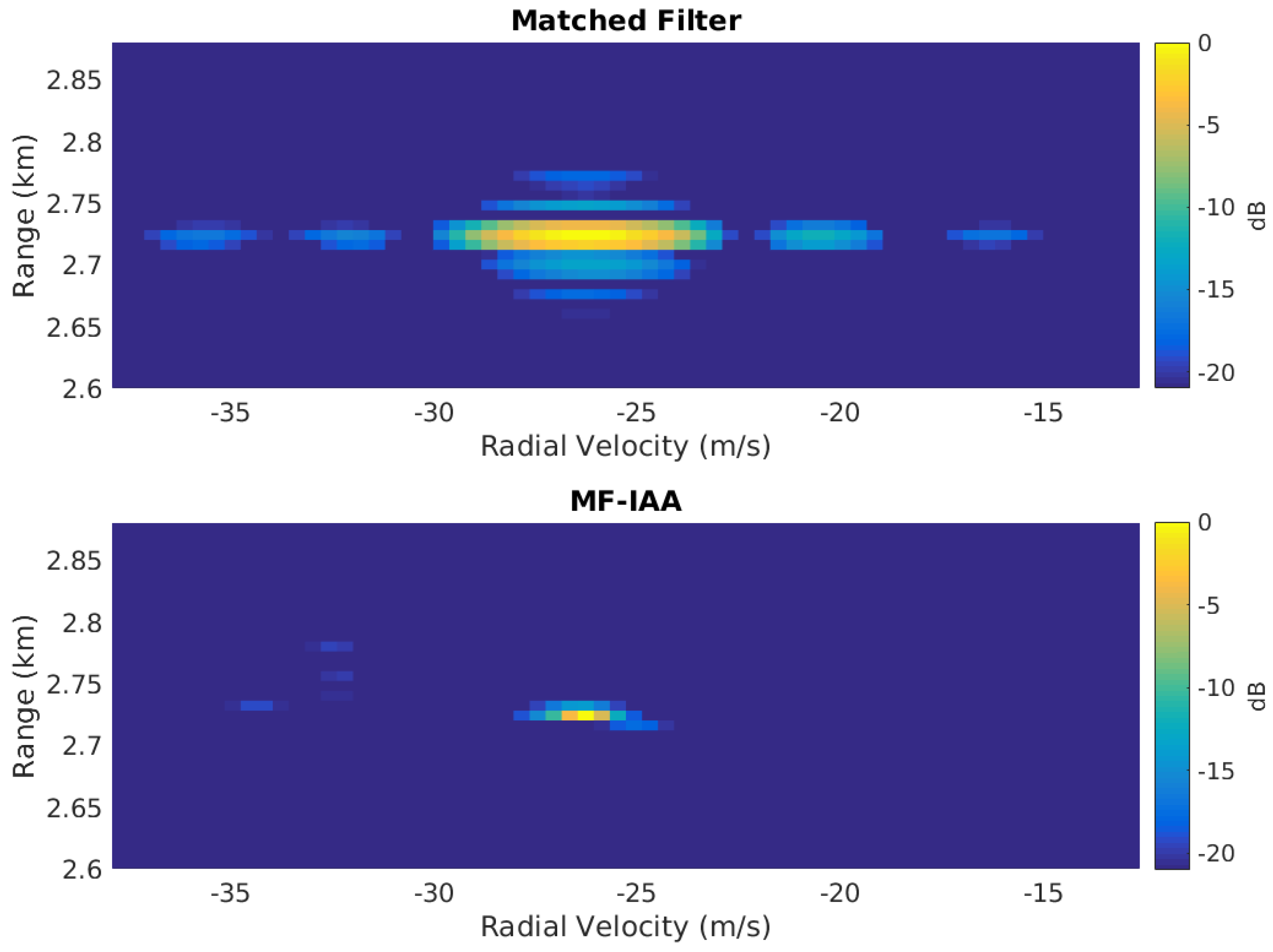
s with a bandwidth of 9.375 MHz. Again, MF-IAA was used to enhance the Doppler resolution by a factor of 10, thereby making the effective resolution 25 Hz. The results are presented in
Figure 10 where the RDI from matched filter outputs is on the top and the IAA output is on the bottom. Although the Doppler estimation is not as precise as in the simulation case, there is a clear enhancement from MF-IAA when compared with RDI from the matched filter results. The range sidelobes are virtually eliminated, while in the case of Doppler, there is some spread of the target itself. This is due to the low number of pulses or a poor starting Doppler frequency resolution. Besides the main lobe spread, there are no Doppler sidelobes in the MF-IAA case. It can be argued that in the case of the availability of more pulses, the Doppler resolution can be further enhanced to produce a “single-pixel” result as in the case of simulated data.
5. Multi-Target Tracking for DAA
As previously mentioned, the basic DAA tracking function is implemented through track while scan (TWS) mode. The Kalman filter (KF) is used for estimating the state of dynamic targets while joint probabilistic data association (JPDA) is used to associate the measurements to tracks. The Kalman filter [
15] provides a recursive method to optimally estimate the state of linear systems in the presence of Gaussian error statistics. JPDA provides joint posterior association probabilities for multiple targets in the presence of Poisson clutter [
16]. KF and JPDA together form the tracking backend of the DAA tracker. Although other state estimation algorithms (e.g., extended Kalman filter, particle filter, etc.) and data association algorithms (e.g., global nearest neighbor, multiple hypothesis tracking, etc.) are available, KF and JPDA are used primarily because of good results with a smaller computational requirement. A “g-sigma ellipsoid” gating is used to reject measurements for each track, which further increases the computational speed.
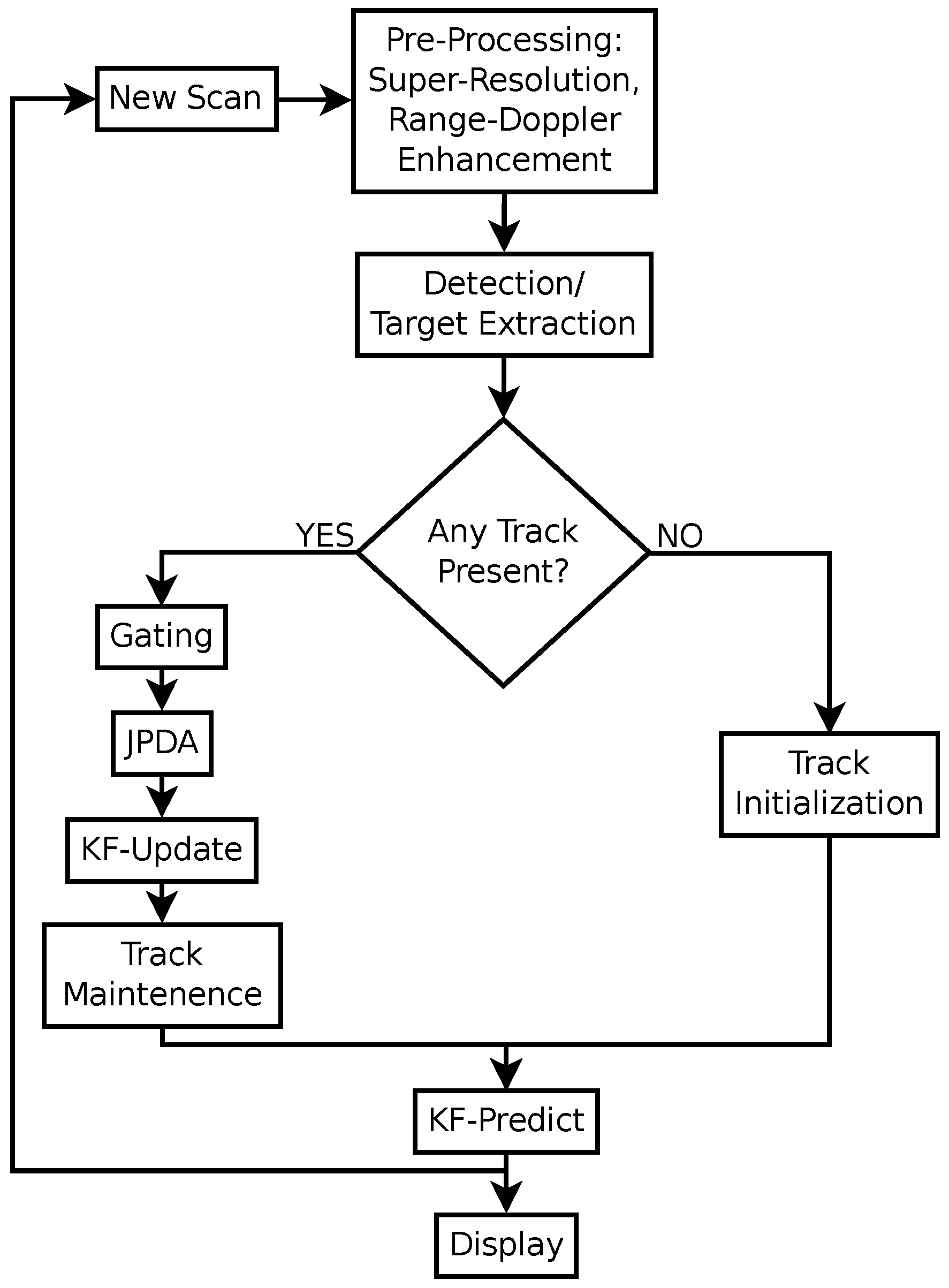
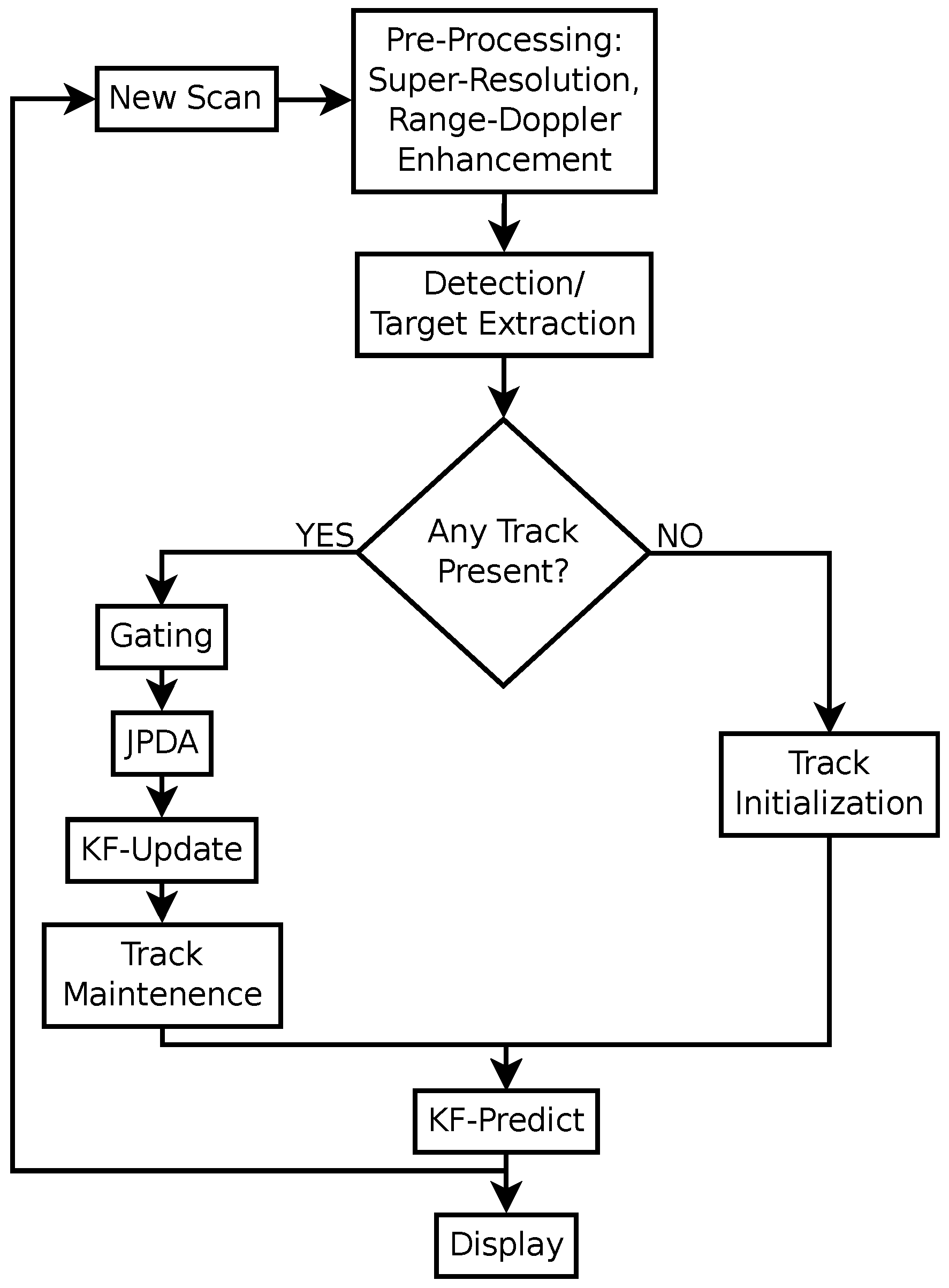
Figure 11 shows the DAA tracker algorithm flow. Note that the “track maintenance” step adds and deletes track as necessary. A tentative track is added when a new target is not associated with any existing tracks. An existing track is deleted if no measurements are associated for a that track during multiple consecutive scans.
Simulated Multi-Target DAA Scenario
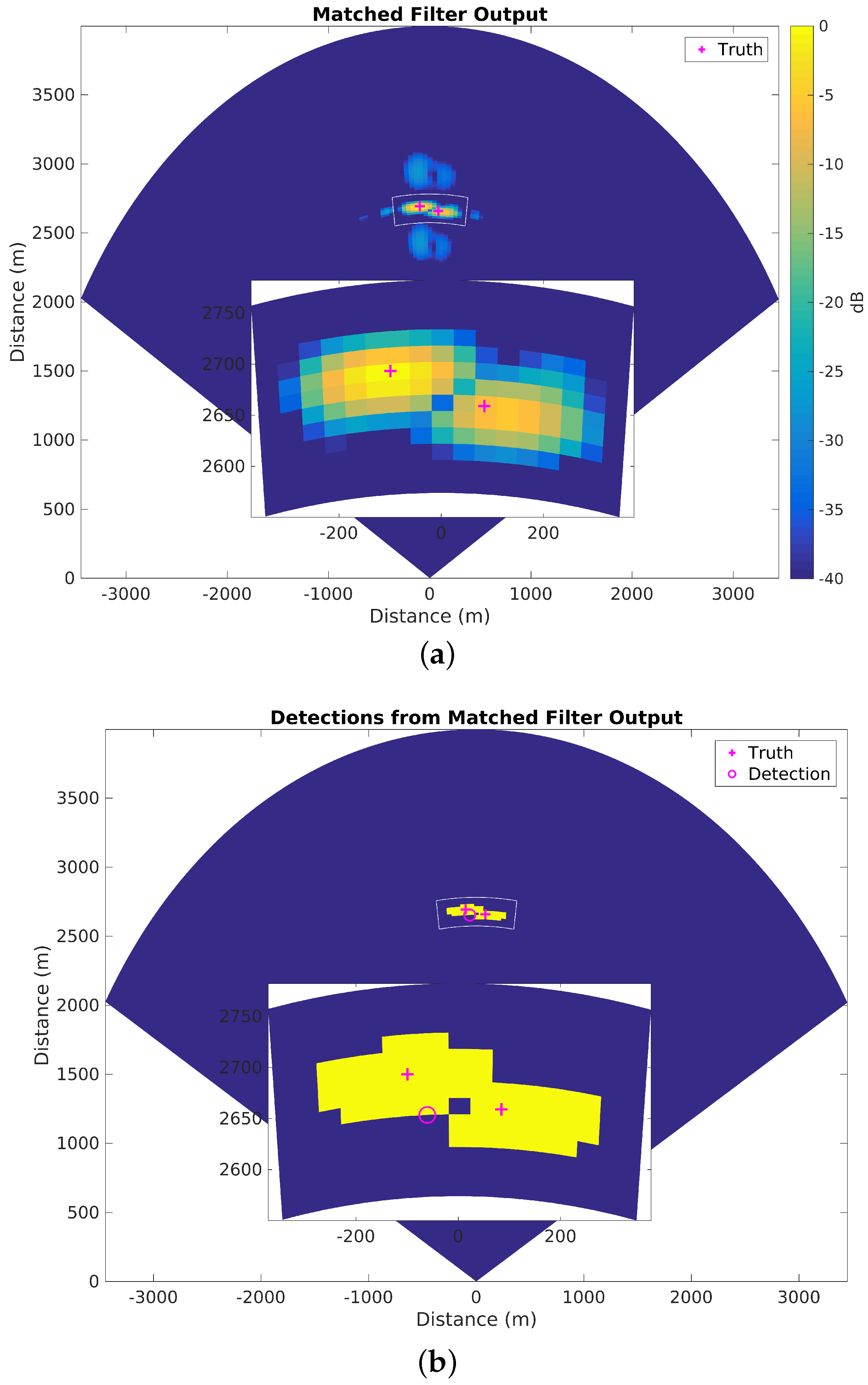
Since we did not have the opportunity to use multiple aircraft in the flight test, a two-target scenario is simulated using MATLAB and Phased Array System Toolbox Release 2016b, The MathWorks Inc., Natick, MA, USA. The simulation parameters are chosen to match the specifications of PARADOX1 as described in
Table 1 except for the antenna. The antenna used for simulation is a phased array antenna with 4.5
azimuth beamwidth and 90
elevation beamwidth. There are two closely moving targets in the simulation scene. The motion model used is a constant acceleration model where noise is modeled as perturbations in acceleration. The noise model is a Gaussian random variable with zero mean and a standard deviation of 6 m/s
in the range direction and 2 m/s
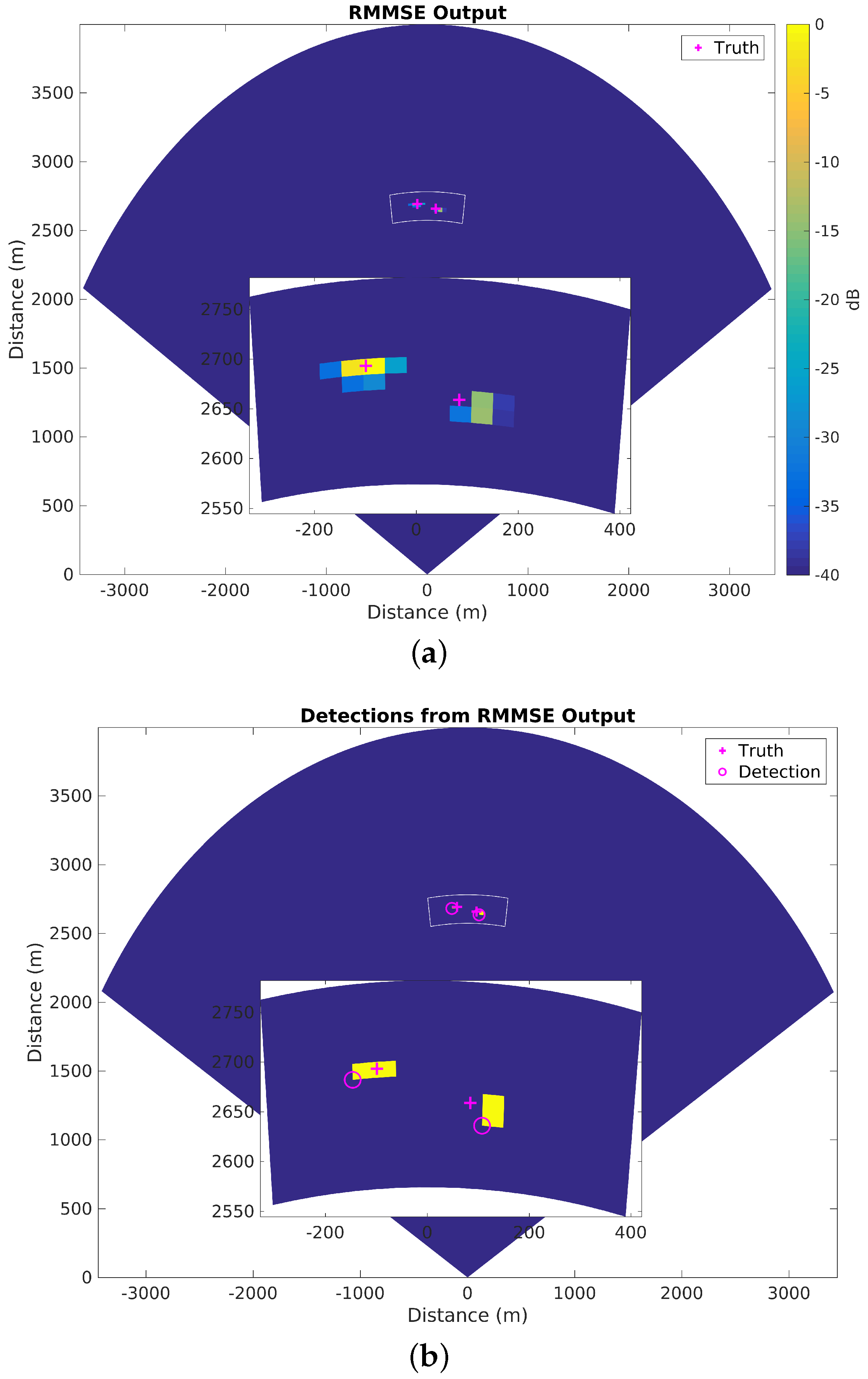
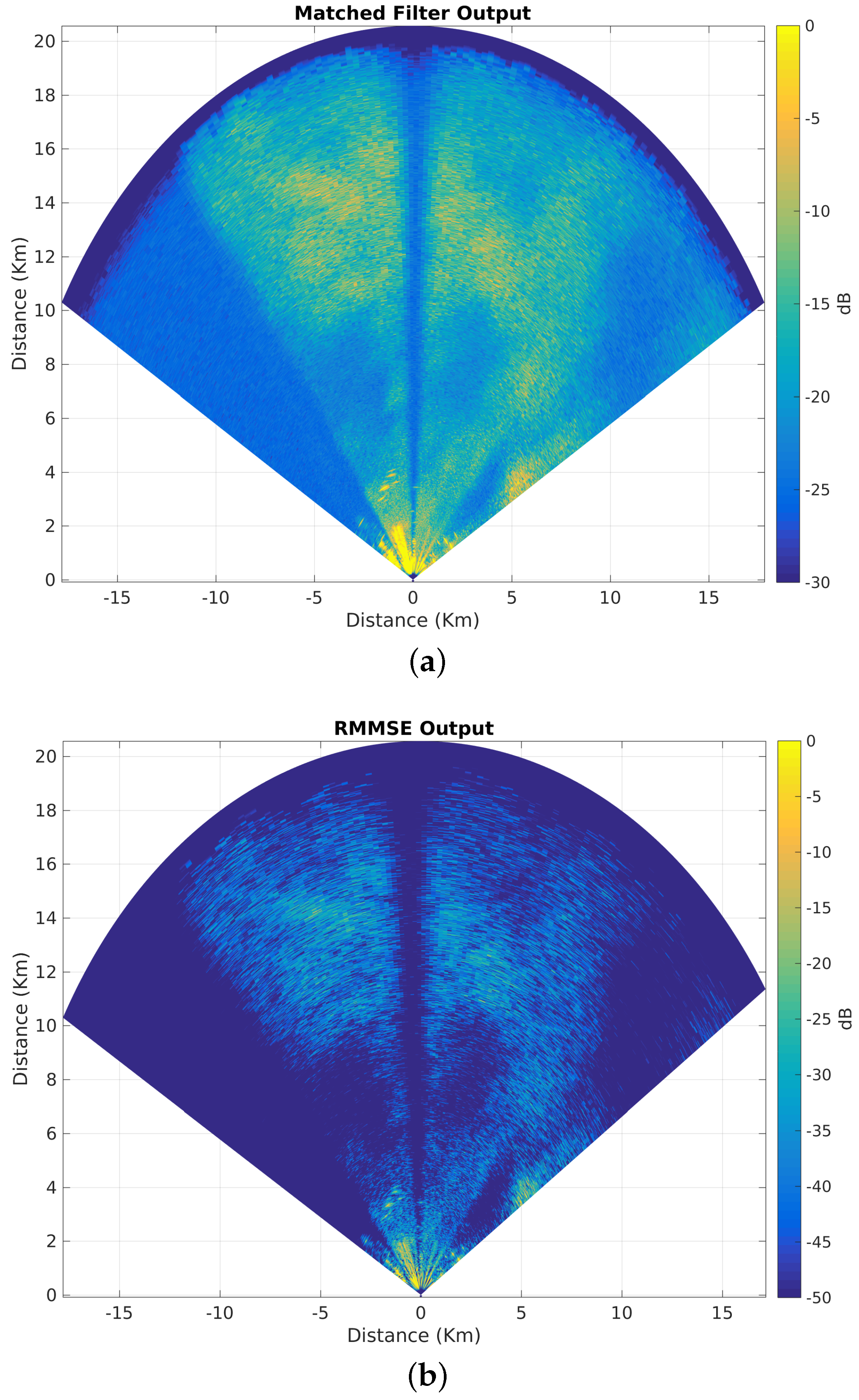
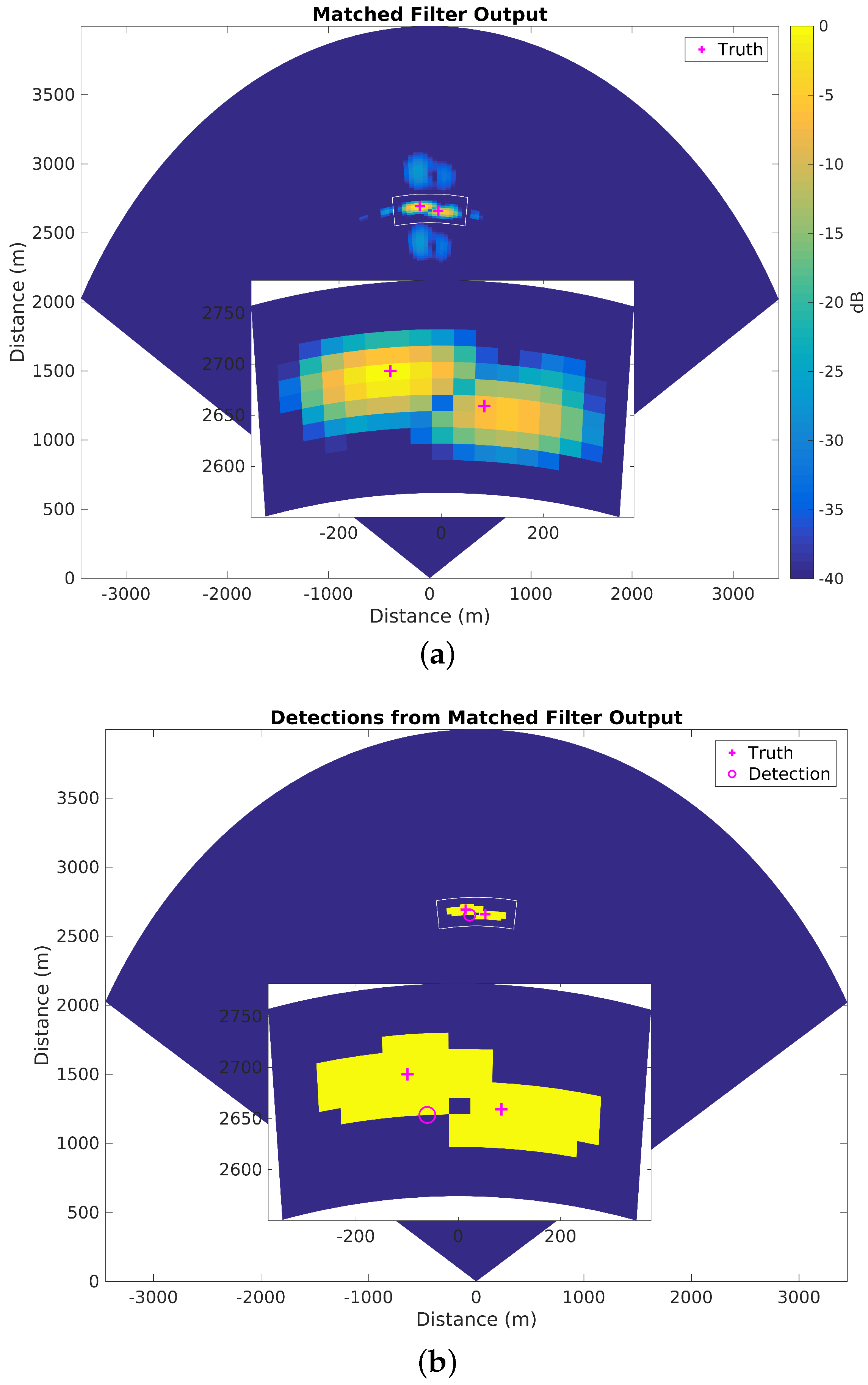
in the cross-range direction. A snapshot of matched filter output and its resulting detection, as well as RMMSE super-resolution algorithm output and its resulting detection is shown in
Figure 5a,b and
Figure 6a,b, respectively. These results are discussed in
Section 3.2. In this section, the tracking performance before and after RMMSE super-resolution algorithm will be discussed. The RMMSE-SR algorithm is used in this case (as opposed to IAA) primarily because the two targets are in separate azimuth angles. The IAA algorithm is used in cases where there are multiple targets in the same azimuth angle (same range profile), but with different yet unresolvable Doppler frequencies.
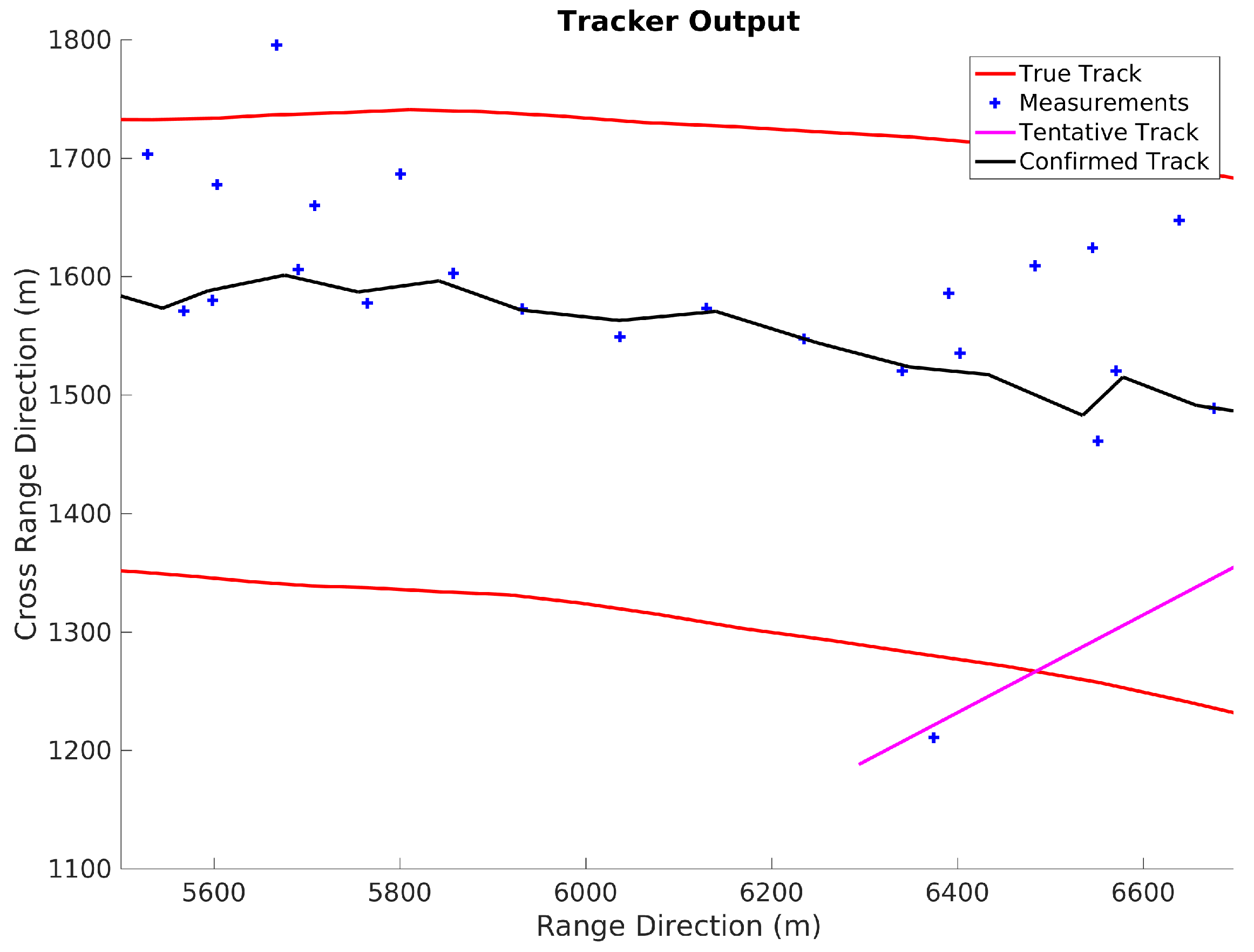
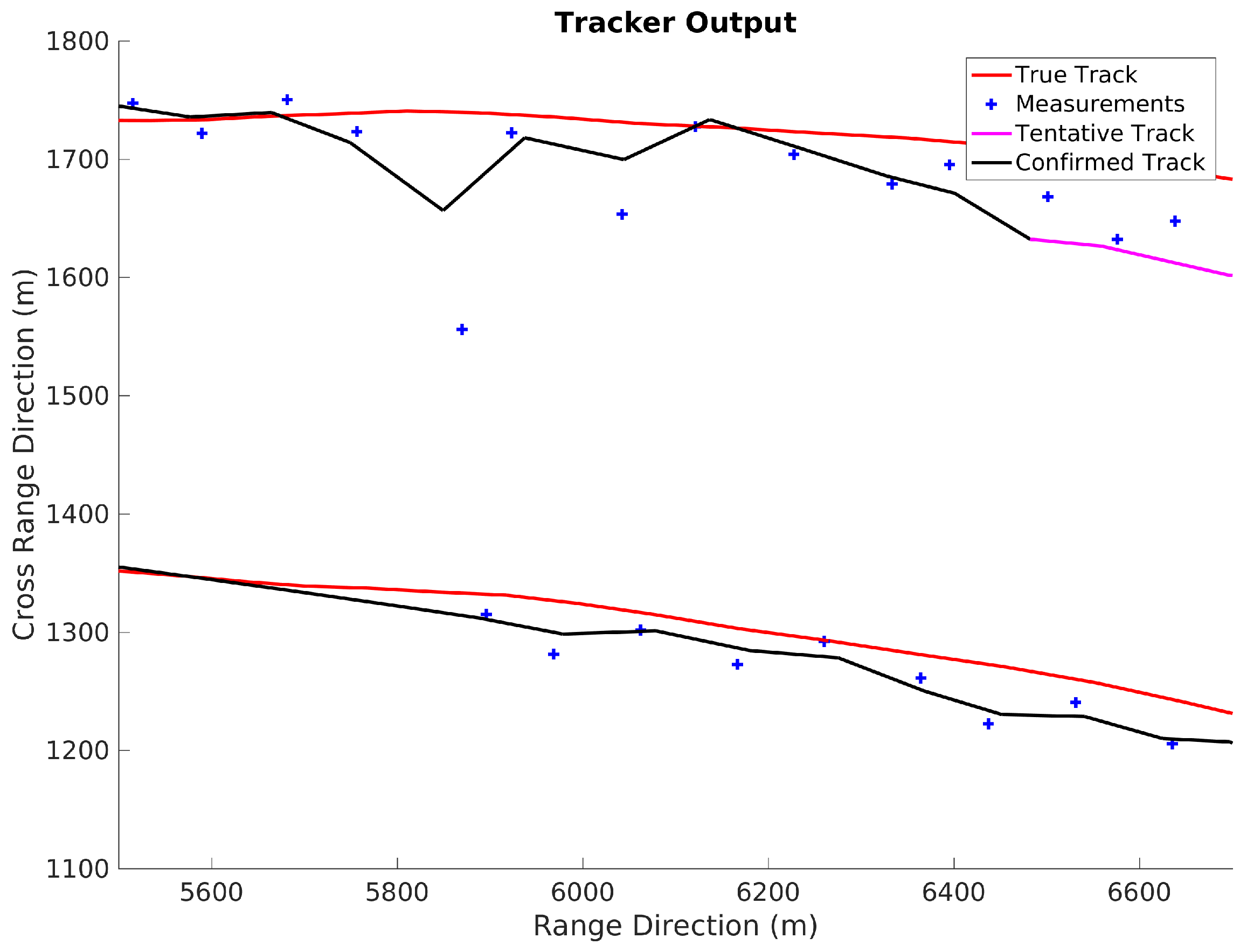
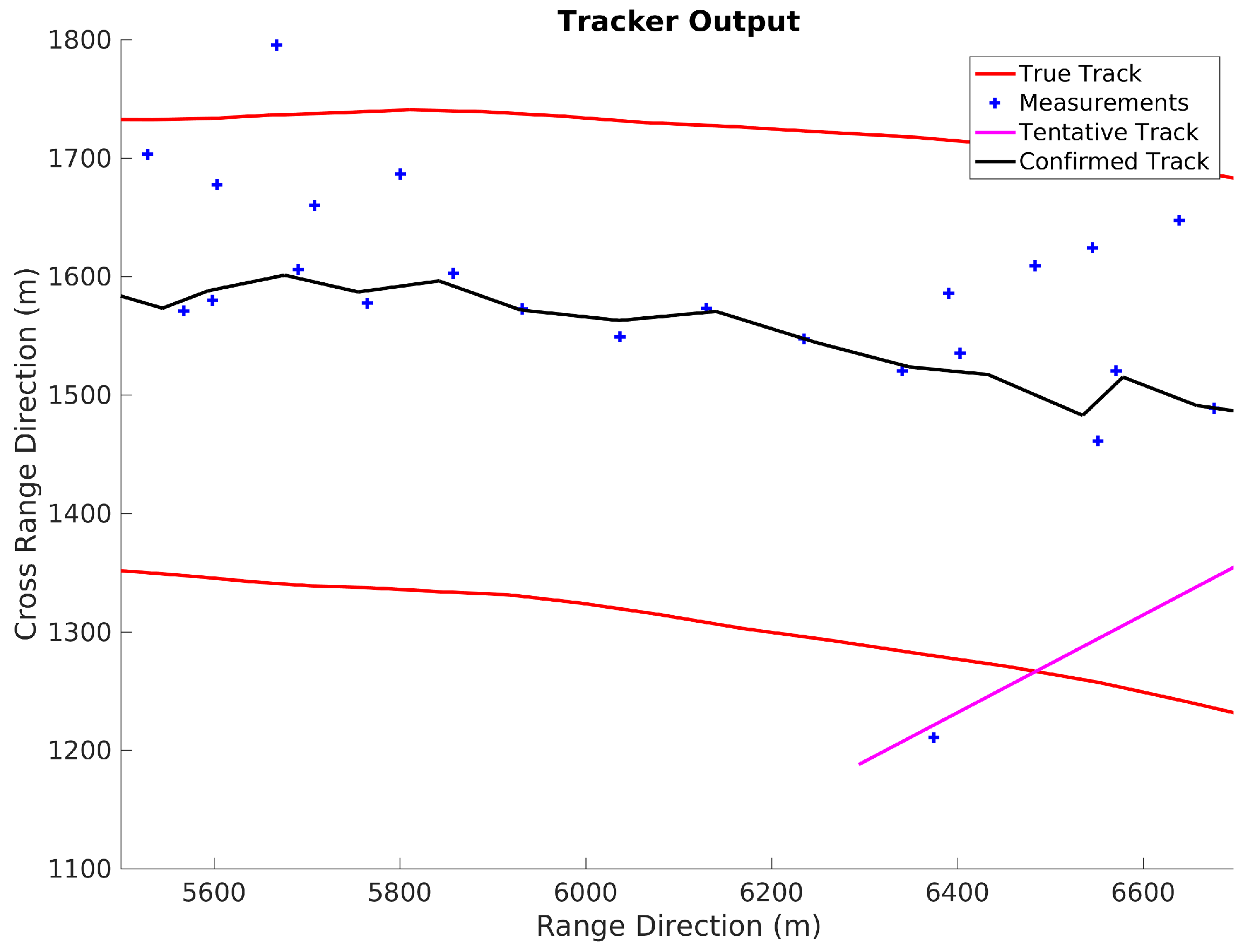
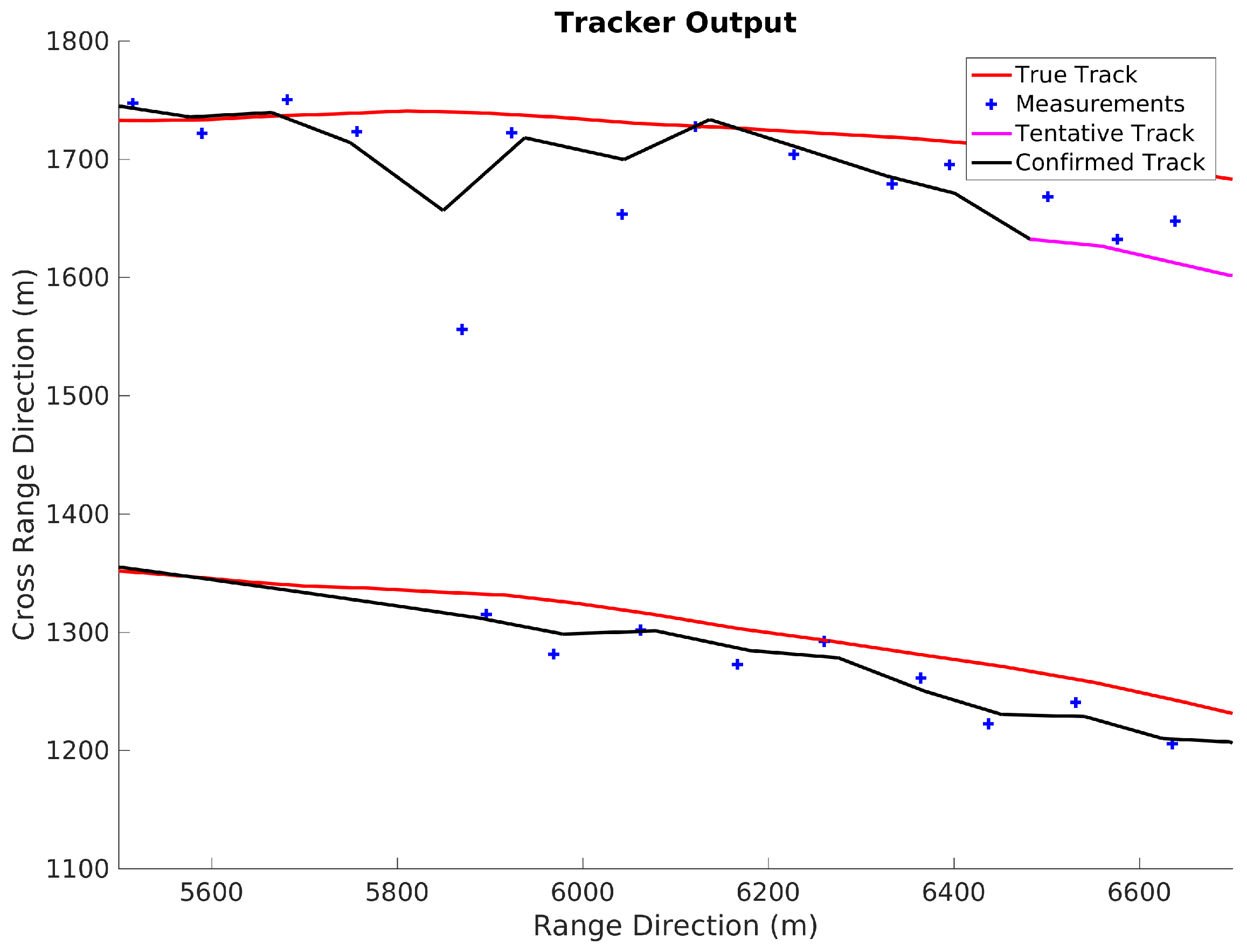
Figure 12 and
Figure 13 show the tracking results with matched filter-based detections and RMMSE-SR-based detections, respectively. Matched filter output does not resolve the two targets adequately, which results in a single track positioned between the two true tracks. The detections are spread out as the radar cross-section (RCS) of the targets vary from scan to scan. In some cases, sidelobes from a stronger target also register as detections. The detections are in the middle of two tracks because the azimuth resolution is low, which results in a single lumped large target to be formed in the binary image. The detection point then would be the center of mass of that lumped large target as discussed in
Section 3 and depicted in
Figure 5a,b. Since a simple threshold detector is used, the tradeoff between having the ability to detect smaller targets (by setting a lower threshold) and preventing sidelobes registering as targets (by setting a higher threshold) becomes more consequential. In the case of RMMSE-SR-based detection and tracking, two tracks are clearly visible. Although there are few detections away from the truth (higher measurement noise), most of the detections are close to the truth and so is the formed track. The data are generated from simulation, and the measurement noise is assumed to be zero. The deviation of measurements from the truth data can be caused by fluctuations in RCS and limited angular resolution. In the RMMSE case (
Figure 13), there is a loss of detection (lower track left side), but the tracker continues to perform without significant degradation. The track updates when the next measurement falls inside the gate (of the predicted position).
6. Ground-Test Experiments and Results
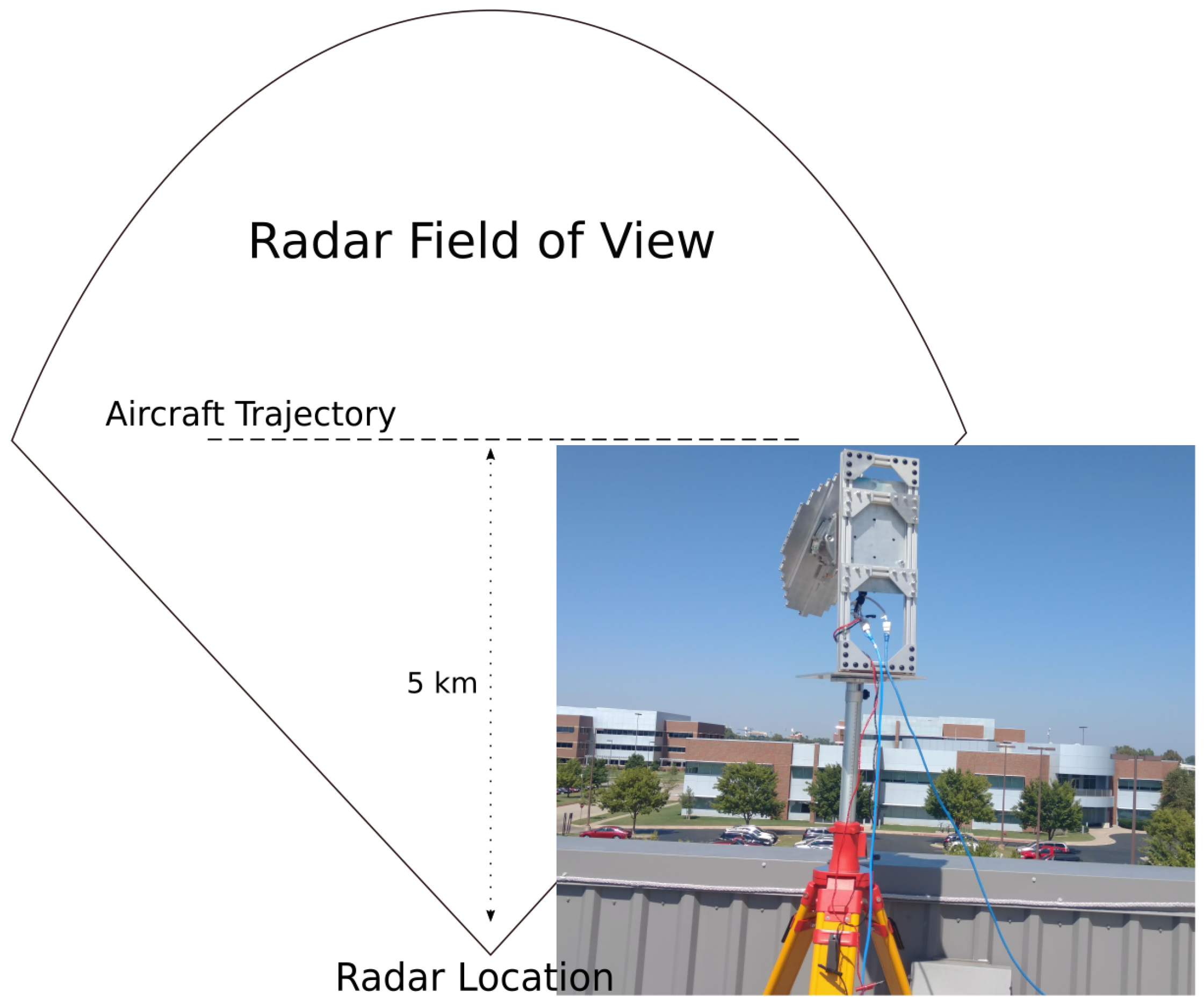
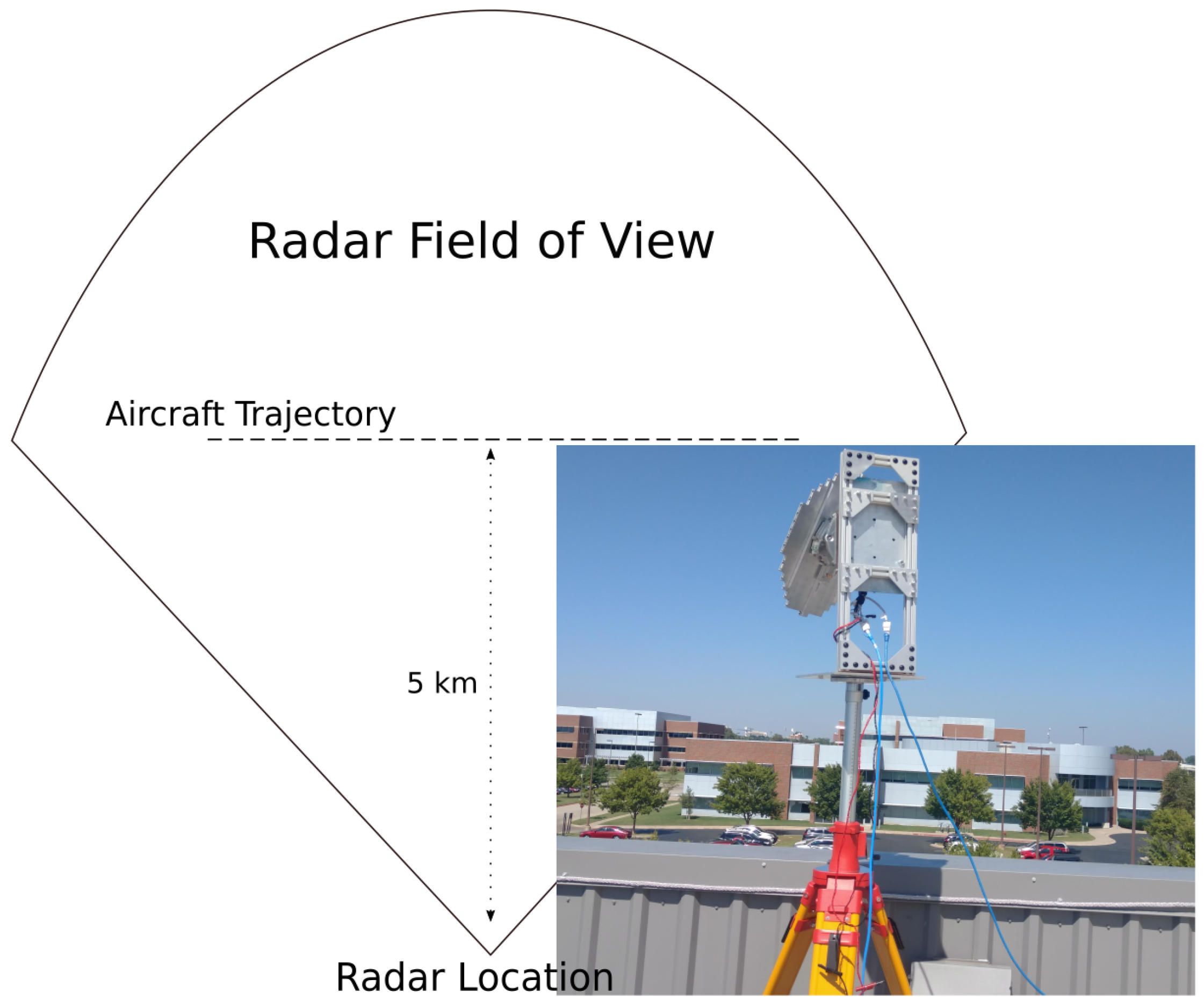
A ground test experiment was conducted to demonstrate the feasibility of real-time tracking using PARADOX1/GSX radar. As previously mentioned, tracking is done in track while scan (TWS) mode. For this ground test, the radar was placed at the roof of a two-story building while a small twin engine aircraft was flown in a predetermined path. A sketch of the flight trajectory and radar location in addition to a picture of the PARADOX1 setup is depicted in
Figure 14. The required elevation angle of the radar was designed to be sufficiently high to eliminate ground clutter returns, which more closely mimics the air-to-air tracking scene. In this particular test, the elevation of the radar is kept constant, and the plane is allowed to fly in and out of the beam coverage in elevation. Note that for an airborne collision avoidance operation, the elevation angle of the radar platform may be changed between scans. Collision threats that are flying in a constant altitude would then be in and out of the beam coverage in elevation similar to the current ground test setup. However, the most compelling scenario is when the collision threat is located in the same horizontal plane (thus at zero elevation) of the radar platform. For such a case, measurement data points will increase due to better scan coverage, which then results in improved tracking performance when compared to the current setup of ground experiment. In this setup, the speed of the airplane is maintained around 55 m/s (with some fluctuations caused by the wind, pilot control/maneuvering, etc.), and the radar scan update time is about 2.5 s.
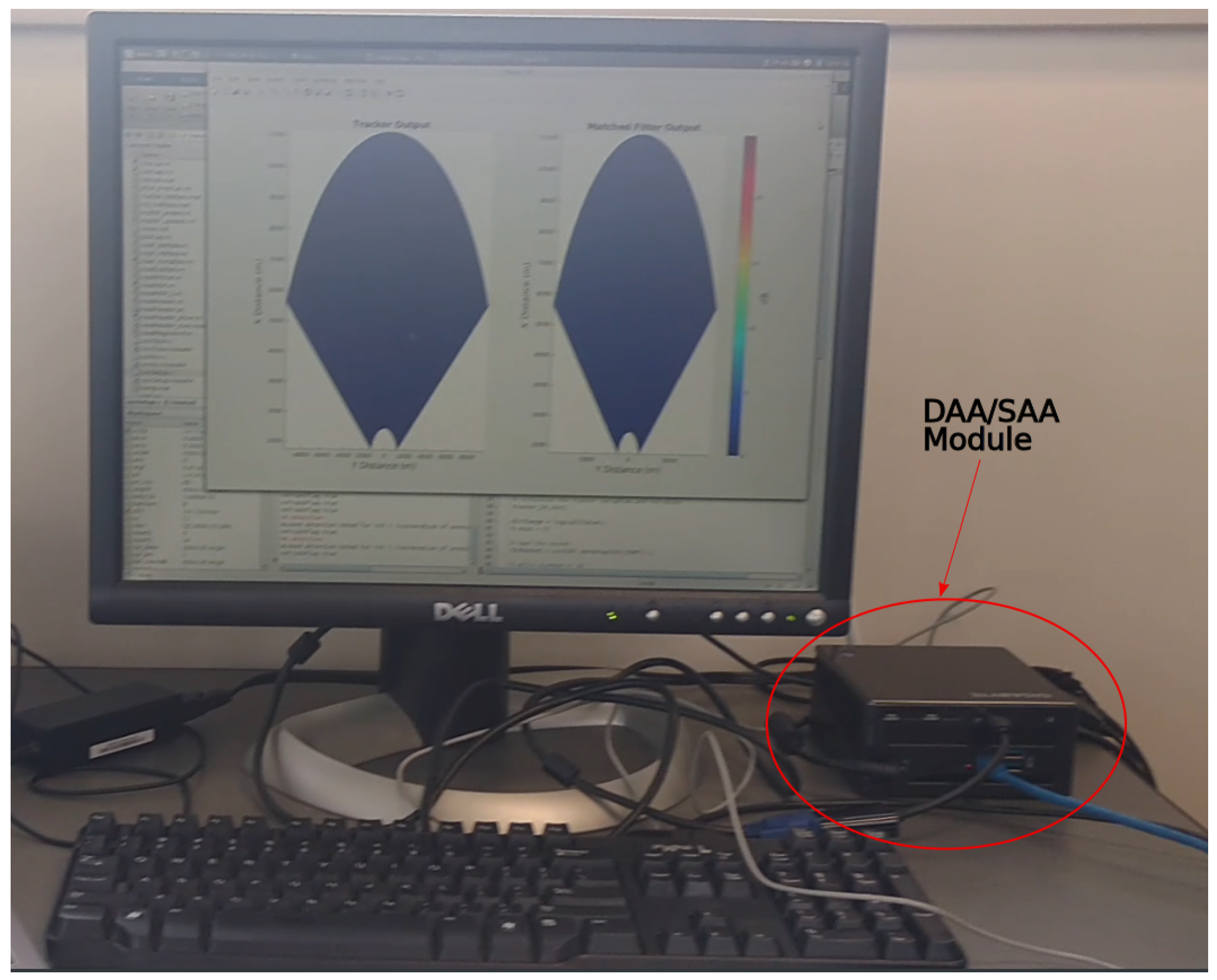
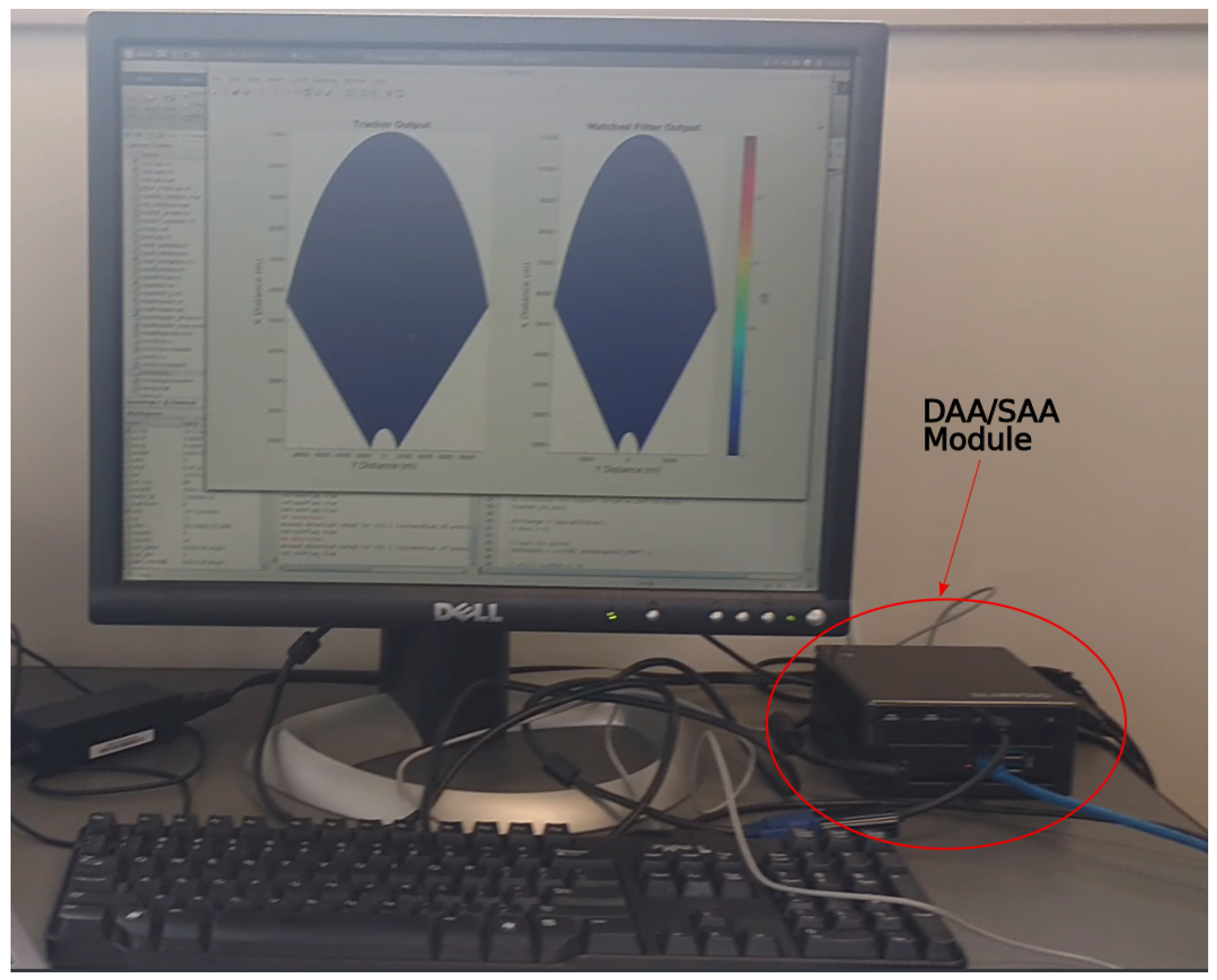
The module used for DAA/SAA tracking consists of a small form factor PC with Intel
© Core
™ i7 processor from Intel Corporation, 2200 Mission College Blvd., Santa Clara, CA, USA and 16 GB of DDR3 random access memory (RAM). The module runs a generic GNU/Linux Operating System. Data from the radar sensor are fed into the module using the gigabit speed Ethernet port, which is read and processed by MATLAB
® using various functions written in C Programming Language. The output to a connected monitor is the PPI of the current scan and tracks resulting from previous scans. In our tests, this hardware is adequate to perform DAA/SAA tracking between each scan update time of about 2.5 s.
Figure 15 shows the module for DAA/SAA tracking.
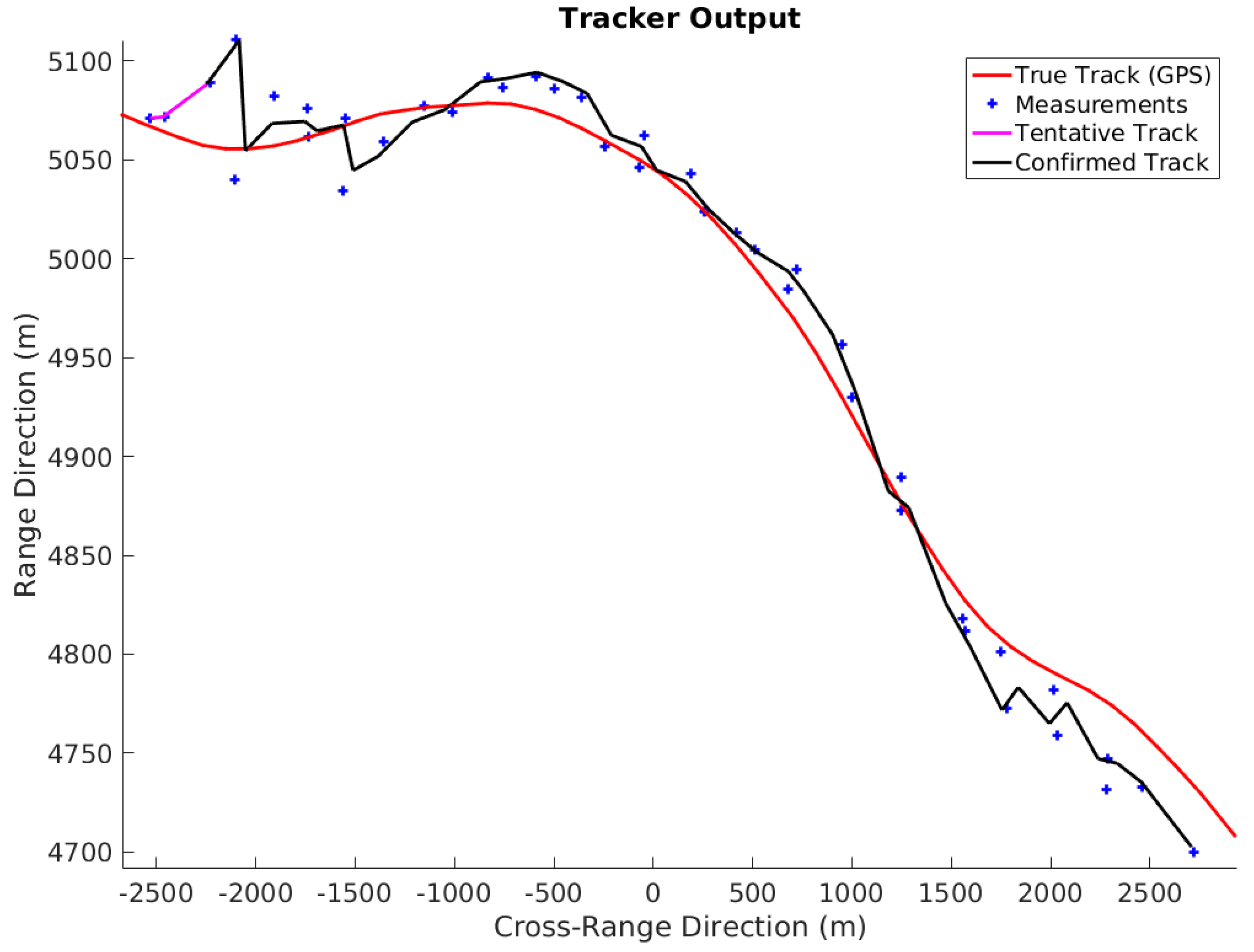
Figure 16 shows a sample tracking result for the current ground tracking test. The figure clearly depicts a confirmed track around the measurement points. The measurements are scattered around the ground truth (as opposed to be coincident). This is most likely caused by errors in GPS measurements (the plane employs a differential GPS system, which is much more accurate than the one used by the ground-based radar). The update time also plays an important role in the bias of measurements. A faster update time generally means less target movement between scans and consequently less bias. Another potential source of error is the angular resolution limitation, which causes “quantization error” in measurements. The current setup of PARADOX1 has an 18-inch antenna with a beamwidth of 5.6
in both elevation and azimuth.
The performance of the Kalman filter and JPDA-based tracker is adequate in this case. The tracker is able to track the measurements and maintain the track for the duration of target visibility. An error analysis is performed between measured values and truth values, which is presented in
Table 3. Although the error in the azimuth direction is expected to be high as it is significantly affected by the azimuthal beam spread, in reality, the values are lower because of the detection procedure (the center of mass of the centroid is assumed to be the measured position). The mean square error in the range dimension is about one range resolution distance, which is acceptable. The maximum error in range is about 43 m, which is due to the unfortunate combination of the radar scan update rate and the plane GPS update rate. In the future, timestamps for each pulse can be noted to decrease this error.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}