
Ergonomics of Prehensility in Pushing and Pulling Motions: An Anatomical and Biomechanical Overview

 ,
,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Anatomy of Prehensility
- (a)
- Terminal opposition prehensility: It allows the development of micrometrically precise and fine prehensility movements. It is carried out by the opposition of the thumb against the index fingertip, as in the act of taking a fine needle or a match between two fingers. In this case the fingertips touch each other in correspondence of their nail margins.
- (b)
- Subterminal opposition prehensility: It is very similar to the previous one, the difference is that this action allows one to hold thicker objects, such as a glass slide, a piece of cardboard, or a pencil, between the index and the thumb, in opposition to each other as before. In this condition the fingertips touch each other in correspondence of their maximum phalangeal surface.
- (c)
- Subterminal-lateral opposition prehensility: The palmar surface of the thumb is brought against the radial side of the middle phalanx. This action allows one to hold small and flattened objects, but of a certain consistency, such as a coin or a piece of cardboard, between these two fingers.
- (d)
- Interdigital lateral-lateral prehensility: It is an ancillary mode of prehensility. It is carried out to hold a generally small and thin object between the lateral surfaces of two neighbouring fingers. Typical of this action is, for example, to hold a cigarette between the fingers. It is therefore a weak and inaccurate type of prehensility.
- (e)
- Digital-palmar opposition prehensility: In this case, the object, generally small, is taken between the palmar surface and flexed fingers. The thumb does not intervene and thus, the prehension results are unsafe: its axis is orthogonal to the axis of the hand and forearm. It is used quite often, generally when manoeuvring a cylindrical small object, such as a bead, nut or coin.
- (f)
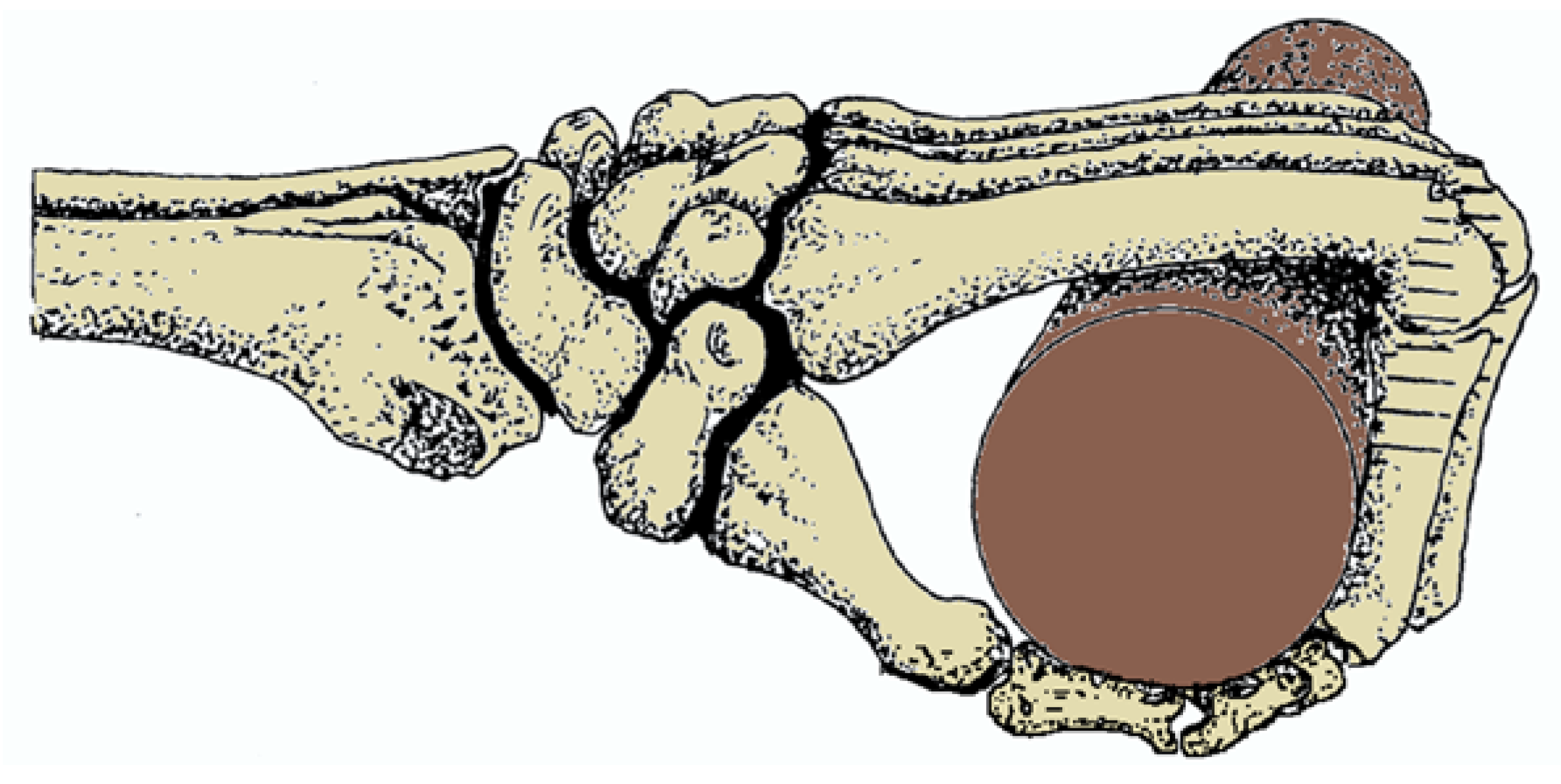
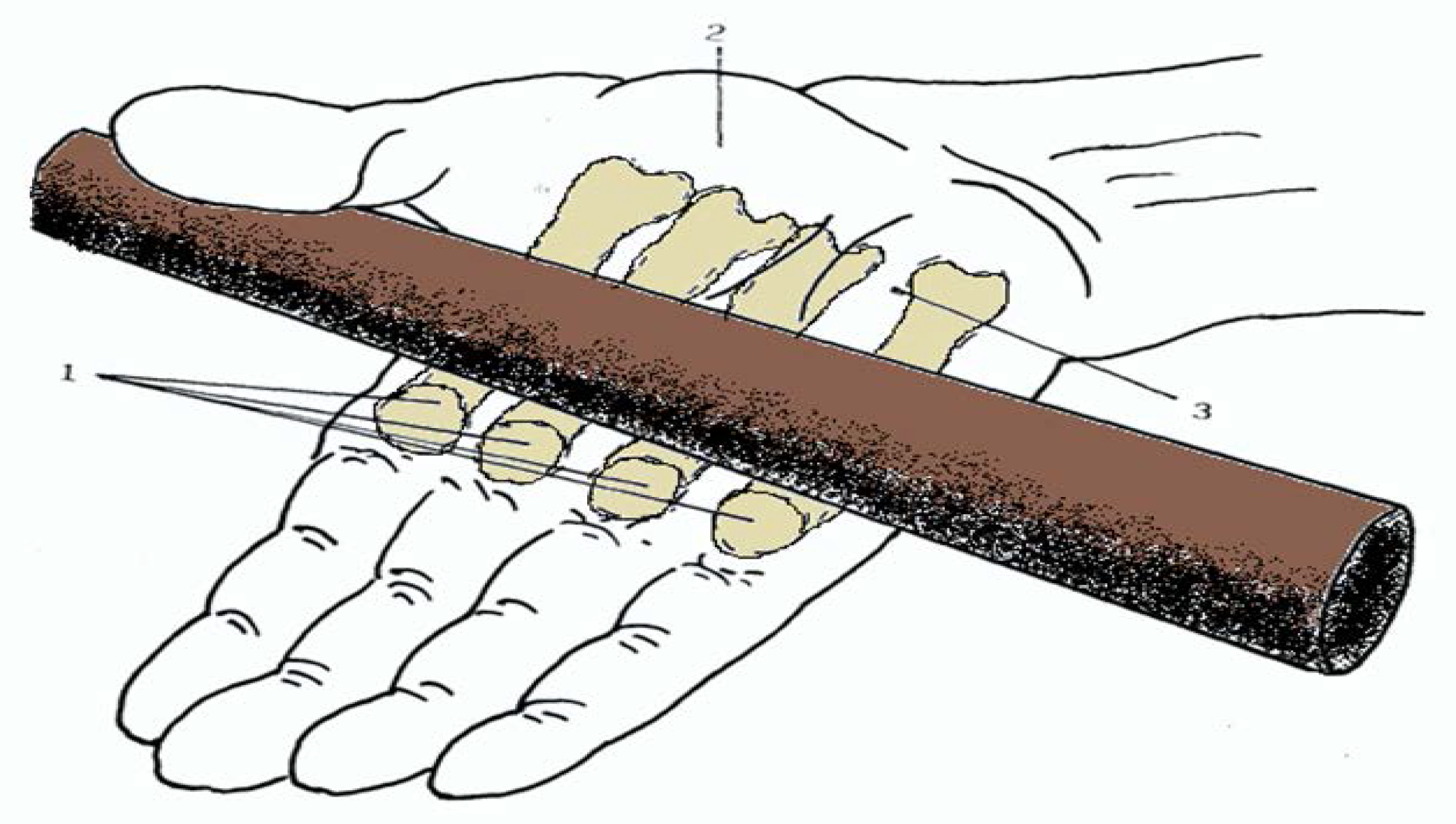
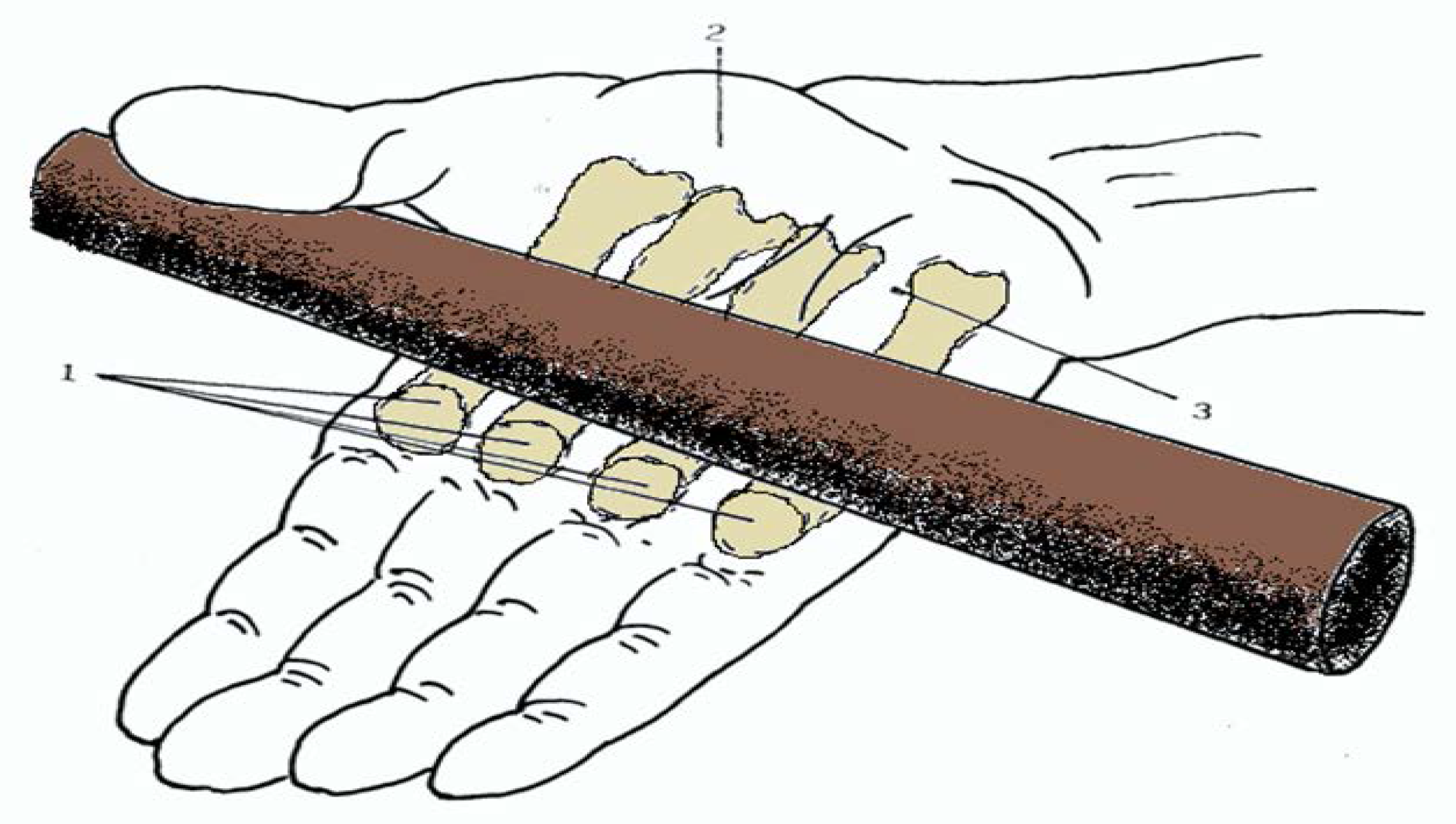
- Palmar (or “full hand”) prehensility: It is a kind of prehensility that ensures the widest and most effective grip of the relatively heavy and voluminous objects. Also in this case their shape is usually cylindrical, spherical, or frustrum. In this action the hand is wrapped in flexion around the object and the axis of its palmar curvature corresponds to the axis of the cylindrical object that it holds. This kind of prehensility is normally used to hold the handle of working tools. In this grip the thumb plays a key role as it is wrapped around the object in opposition to the other fingers. The strength of the prehensility is strongly conditioned by the diameter of the held object: this one is optimal when the thumb touches the index.
3. The Prehensility of the Paddle
- (a)
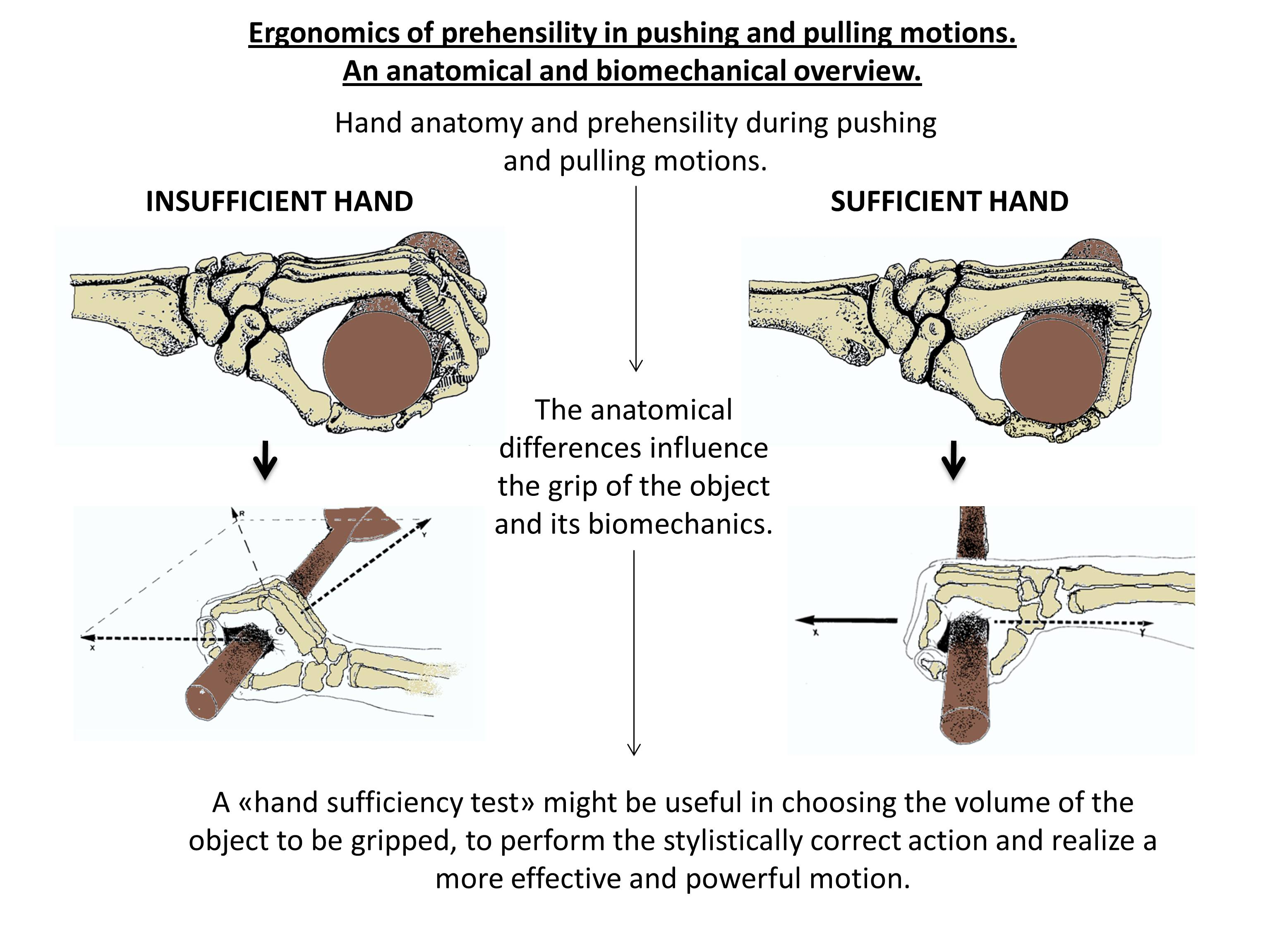
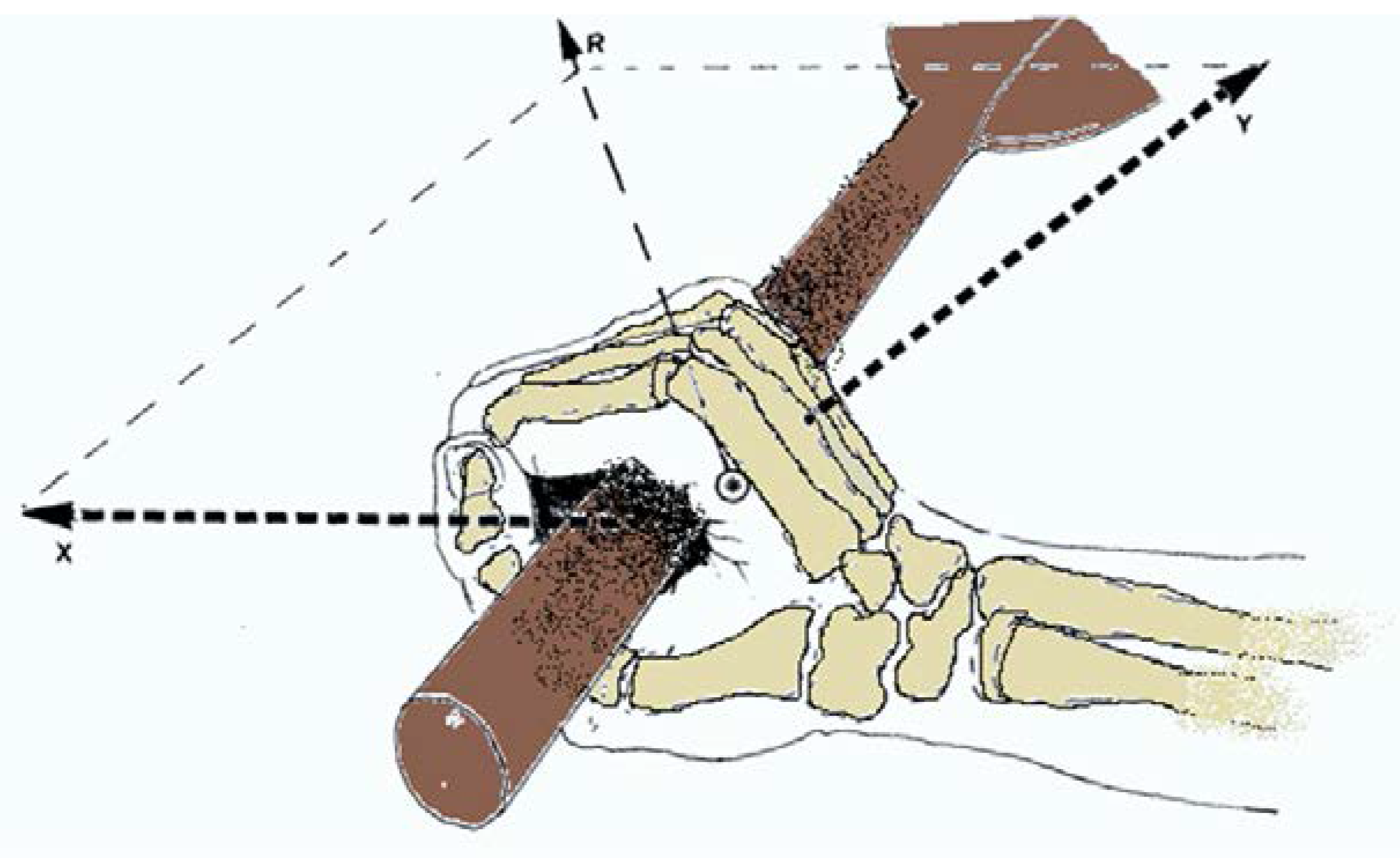
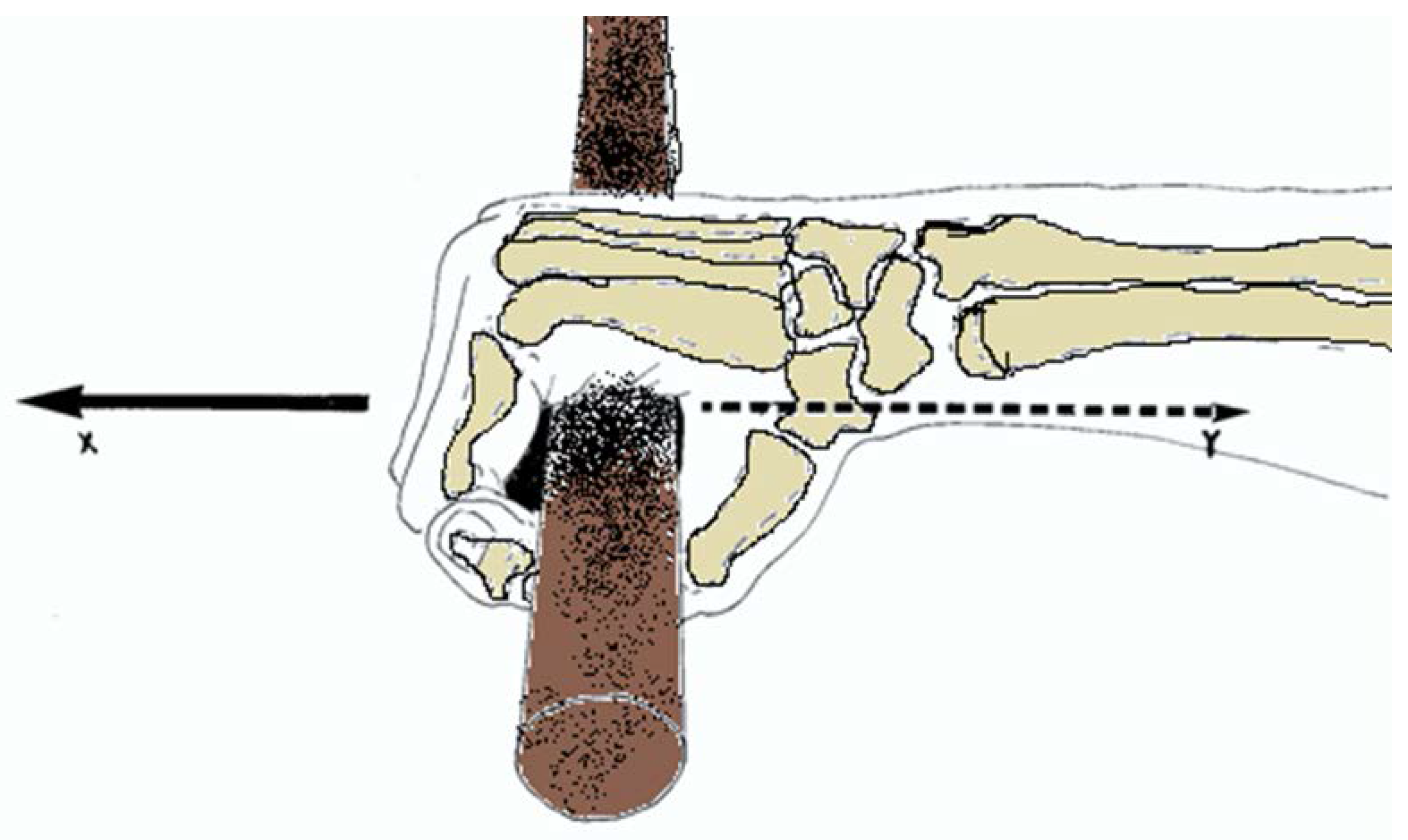
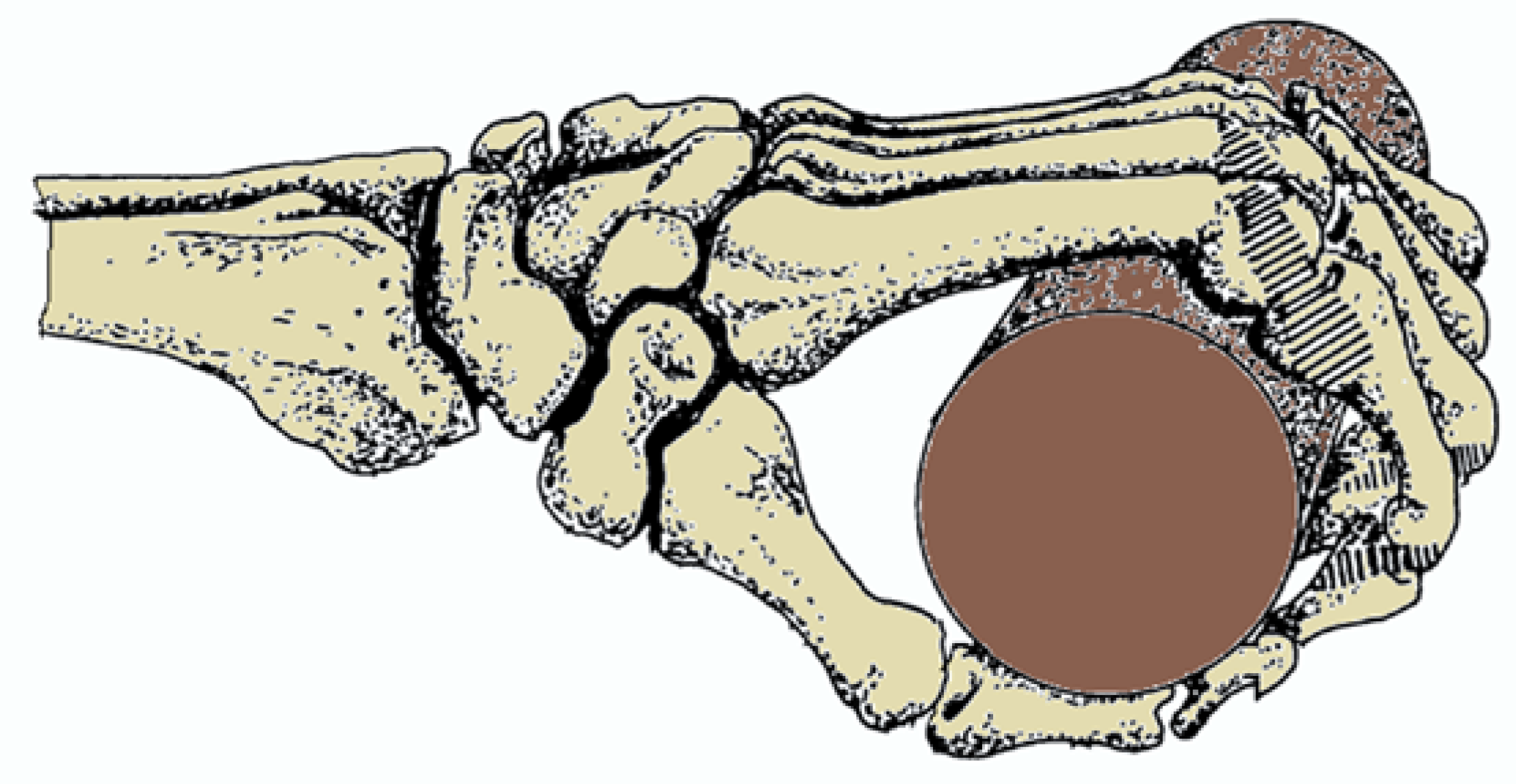
- Traction phase: In the case of an insufficient grip (Figure 6), the resistance that the blade of the paddle meets along its course in the water moves on the phalanges that tighten the pole, which, not blocked in flexion, will tend to open up. The continuous use of the forearm flexor muscles allows one to maintain the flexion of the fingers on the pole, resulting in painful forearm hardening and progressive and inexorable loss of effectiveness of paddling. These negative effects will be unknown for the hand with long metacarpal shafts: this fact enables the “automatic” flexion of the metacarpophalangeal and interphalangeal joints on the pole of the paddle, with the benefit of detention of the forearm flexor muscles, which will thus be able to contribute to the upper limb function to realize the traction in the water. Moreover, another important factor for the traction phase might be given by the surface friction of the paddle, which seems to be very important for the breakaway strength of the hand grip [34].
- (b)
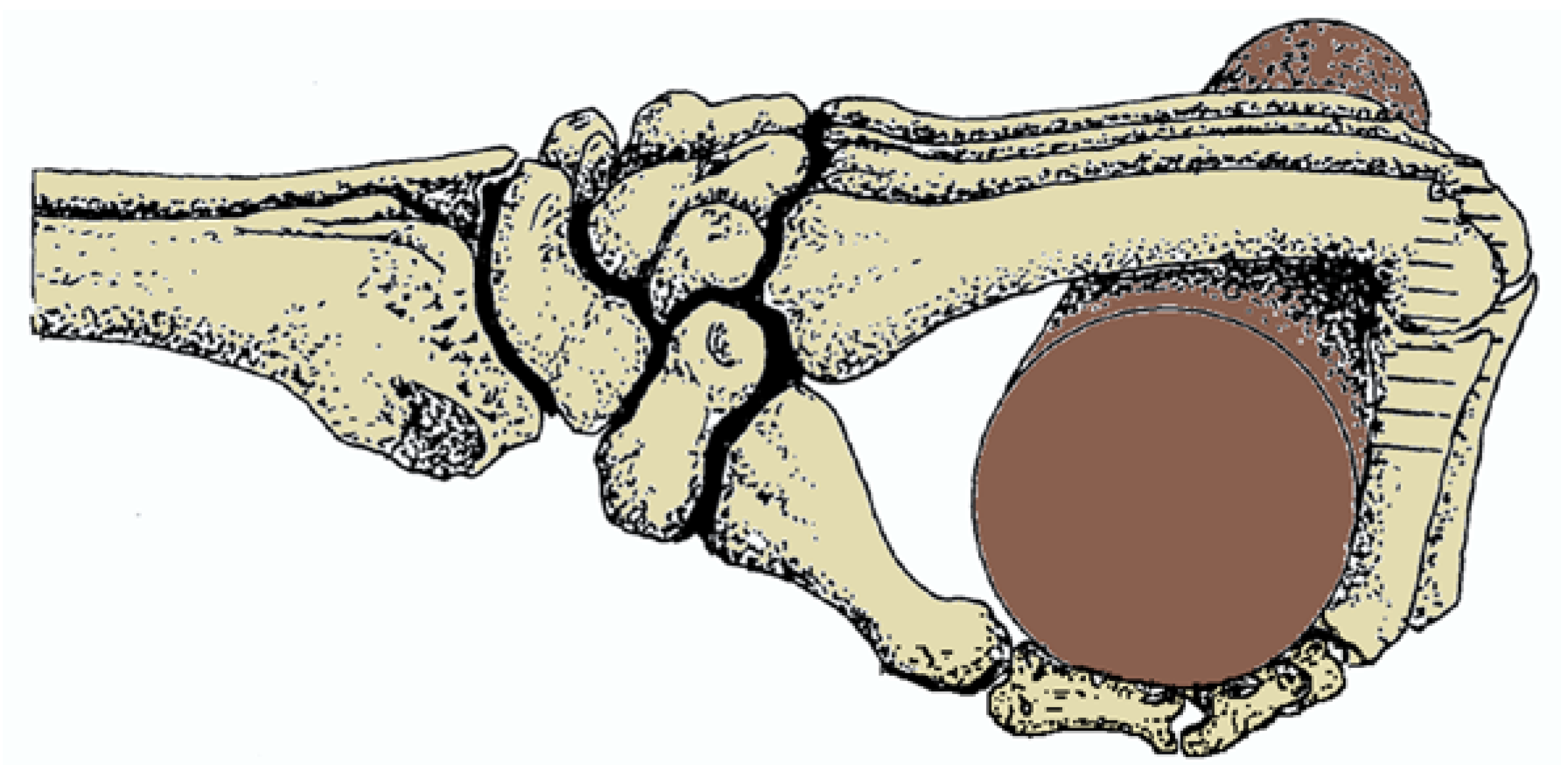
- Push phase: An inadequate length of the metacarpal shaft, leads to an aberrant prehensility pattern of the push phase of the paddling skill: the plane of the metacarpal portion of the hand will not be in register with the carpal and forearm axis (Figure 6). The paddle pole is then not recipient of the total push force dissipated by the resulting angulation developed by the deviation of the metacarpal-carpal vector forces. The consequence of this is that the push action will be produced almost exclusively by the metacarpal portion of the hand, with an obvious loss of this efficacy (Figure 6).
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jones, L.A.; Lederman, S.J. Human Hand Function; Oxford University Press: New York, NY, USA, 2006; pp. 137–140. [Google Scholar]
- Ehrlich, P.F.; Young, J.G.; Ulin, S.; Woolley, C.; Armstrong, T.J.; Galecki, A.; Chen, S.; Ashton-Miller, J.A. Maximum hand-rung coupling forces in children: The effects of handhold diameter. Hum. Factors 2013, 55, 545–556. [Google Scholar] [CrossRef] [PubMed]
- Pawar, P.K.; Dadhich, A. Study of correlation between human height and hand length in residents of Mumbai. Int. J. Biol. Med. Res. 2012, 3, 2072–2075. [Google Scholar]
- Rumball, J.S.; Lebrun, C.M.; di Ciacca, S.R.; Orlando, K. Rowing injuries. Sports Med. 2005, 35, 537–555. [Google Scholar] [CrossRef] [PubMed]
- Newlands, C.; Reid, D.; Parmar, P. The prevalence, incidence and severity of low back pain among international-level rowers. Br. J. Sports Med. 2015, 49, 951–956. [Google Scholar] [CrossRef] [PubMed]
- Baugh, C.M.; Kerr, Z.Y. High school rowing injuries: National Athletic Treatment, Injury and Outcomes Network (NATION). J. Athl. Train. 2016, 51, 317–320. [Google Scholar] [CrossRef] [PubMed]
- Napier, J.R. The prehensile movements of the human hand. J. Bone Jt. Surg. Br. 1956, 38-B, 902–913. [Google Scholar]
- Landsmeer, J.M. Power grip and precision handling. Ann. Rheum. Dis. 1962, 21, 164–170. [Google Scholar] [CrossRef] [PubMed]
- Latash, M.L.; Zatsiorsky, V.M. Multi-finger prehension: Control of a redundant mechanical system. Adv. Exp. Med. Biol. 2009, 629, 597–618. [Google Scholar] [PubMed]
- Budgeon, M.K.; Latash, M.L.; Zatsiorsky, V.M. Digit force adjustments during finger addition/removal in multi-digit prehension. Exp. Brain. Res. 2008, 189, 345–359. [Google Scholar] [CrossRef] [PubMed]
- Bootsma, R.J.; Marteniuk, R.G.; MacKenzie, C.L.; Zaal, F.T. The speed-accuracy trade-off in manual prehension: Effects of movement amplitude, object size and object width on kinematic characteristics. Exp. Brain. Res. 1994, 98, 535–541. [Google Scholar] [CrossRef] [PubMed]
- Eastough, D.; Edwards, M.G. Movement kinematics in prehension are affected by grasping objects of different mass. Exp. Brain. Res. 2007, 176, 193–198. [Google Scholar] [CrossRef] [PubMed]
- Johansson, R.S.; Westling, G. Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp. Brain. Res. 1984, 56, 550–564. [Google Scholar] [CrossRef] [PubMed]
- Loh, M.N.; Kirsch, L.; Rothwell, J.C.; Lemon, R.N.; Davare, M. Information about the weight of grasped objects from vision and internal models interacts within the primary motor cortex. J. Neurosci. 2010, 30, 6984–6990. [Google Scholar] [CrossRef] [PubMed]
- Qiu, D.; Fisher, H.C.; Kamper, D.G. Muscle activation patterns during force generation of the index finger. In Proceedings of the EMBC 2009 Annual International Conference of the IEEE, Minneapolis, MN, USA, 3–6 September 2009; pp. 3987–3990.
- Long, C.; Conrad, P.W.; Hall, E.A.; Furler, S.L. Intrinsic-extrinsic muscle control of the hand in power grip and precision handling. An electromyographic study. J. Bone Jt. Surg. Am. 1970, 52, 853–867. [Google Scholar] [CrossRef]
- Chong, H.I.; Kim, S.J.; Lee, E.K.; Yoo, G.E. Analysis of surface EMG activation in hand percussion playing depending on the grasping type and the tempo. J. Exerc. Rehabil. 2015, 11, 228–235. [Google Scholar] [CrossRef] [PubMed]
- Mogk, J.; Keir, P. The effects of posture on forearm muscle loading during gripping. Ergonomics 2003, 46, 956–975. [Google Scholar] [CrossRef] [PubMed]
- Hägg, G.M.; Milerad, E. Forearm extensor and flexor muscle exertion during simulated gripping work—An electromyographic study. Clin. Biomech. (Bristol, Avon) 1997, 12, 39–43. [Google Scholar] [CrossRef]
- Harih, G.; Dolsak, B. Comparison of subjective comfort ratings between anatomically shaped and cylindrical handles. Appl. Ergon. 2014, 45, 943–954. [Google Scholar] [CrossRef] [PubMed]
- Berguer, R.; Gerber, S.; Kilpatrick, G.; Remller, M.; BecLey, D. A comparison of forearm and thumb muscle electromyographic responses to the use of laparoscopic instruments with either a finger grasp or a palm grasp. Ergonomics 1999, 42, 1634–1645. [Google Scholar] [CrossRef] [PubMed]
- Abidin, M.R.; Thacker, J.G.; Becker, D.G.; Saunders, J.C.; Nayak, S.; Bacchetta, S.F.; Edlich, R.F. Hydrofitness devices for strengthening upper extremity muscles. J. Burn Care Rehabil. 1988, 9, 199–202. [Google Scholar] [PubMed]
- Duque, J.; Masset, D.; Malchaire, J. Evaluation of handgrip force from EMG measurements. J. Appl. Ergon. 1995, 26, 61–66. [Google Scholar] [CrossRef]
- Kong, Y.K.; Kim, D.M.; Lee, K.S.; Jung, M.C. Comparison of comfort, discomfort, and continuum ratings of force levels and hand regions during gripping exertions. Appl. Ergon. 2012, 43, 283–289. [Google Scholar] [CrossRef] [PubMed]
- Kong, Y.K.; Lowe, B. Optimal cylindrical handle diameter for grip force tasks. Int. J. Ind. Ergon. 2005, 35, 495–507. [Google Scholar] [CrossRef]
- Wu, J.Z.; Dong, R.G. Analysis of the contact interactions between fingertips and objects with different surface curvatures. Proc. Inst. Mech. Eng. H 2005, 219, 89–103. [Google Scholar] [CrossRef] [PubMed]
- Hoozemans, M.J.; van Dieën, J.H. Prediction of handgrip forces using surface EMG of forearm muscles. J. Electromyogr. Kinesiol. 2005, 15, 358–366. [Google Scholar] [CrossRef] [PubMed]
- Ong, K.B.; Ackand, T.R.; Hume, P.A.; Ridge, B.; Broad, E.; Kerr, D.A. Equipment set-up among Olympic sprint and slalom kayak paddlers. Sports Biomech. 2005, 4, 47–58. [Google Scholar] [CrossRef] [PubMed]
- Burstedt, M.K.; Flanagan, J.R.; Johansson, R.S. Control of grasp stability in humans under different frictional conditions during multidigit manipulation. J. Neurophysiol. 1999, 82, 2393–2405. [Google Scholar] [PubMed]
- Ansuini, C.; Giosa, L.; Turella, L.; Altoè, G.; Castiello, U. An object for an action, the same object for other actions: Effects on hand shaping. Exp. Brain Res. 2008, 185, 111–119. [Google Scholar] [CrossRef] [PubMed]
- Ansuini, C.; Santello, M.; Tubaldi, F.; Massaccesi, S.; Castiello, U. Control of handhaping in response to object shape perturbation. Exp. Brain Res. 2007, 180, 85–96. [Google Scholar] [CrossRef] [PubMed]
- Quéinnec, Y.; Daniellou, F. Designing for everyone. In Proceedings of the IIth Congress of the International Ergonomics Association, Paris-La Villet, France, 15–20 July 1991; Taylor & Francis: Paris, France, 1991; Volume 1, pp. 311–313. [Google Scholar]
- Young, J.G.; Woolley, C.; Armstrong, T.J.; Ashton-Miller, J.A. Hand-handhold coupling: Effect of handle shape, orientation, and friction on breakaway strength. Hum. Factors 2009, 51, 705–717. [Google Scholar] [CrossRef] [PubMed]
- Young, J.G.; Woolley, C.B.; Ashton-Miller, J.A.; Armstrong, T.J. The effect of handhold orientation, size, and wearing gloves on hand-handhold breakaway strength. Hum. Factors 2012, 54, 316–333. [Google Scholar] [CrossRef] [PubMed]



© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szychlinska, M.A.; Dullaert, K.; Beumer, A.; Nsir, H.; Guglielmino, C.; Mazzone, V.; Giunta, S. Ergonomics of Prehensility in Pushing and Pulling Motions: An Anatomical and Biomechanical Overview. J. Funct. Morphol. Kinesiol. 2017, 2, 6. https://doi.org/10.3390/jfmk2010006
Szychlinska MA, Dullaert K, Beumer A, Nsir H, Guglielmino C, Mazzone V, Giunta S. Ergonomics of Prehensility in Pushing and Pulling Motions: An Anatomical and Biomechanical Overview. Journal of Functional Morphology and Kinesiology. 2017; 2(1):6. https://doi.org/10.3390/jfmk2010006
Chicago/Turabian StyleSzychlinska, Marta Anna, Koen Dullaert, Annechien Beumer, Houda Nsir, Claudia Guglielmino, Venera Mazzone, and Salvatore Giunta. 2017. "Ergonomics of Prehensility in Pushing and Pulling Motions: An Anatomical and Biomechanical Overview" Journal of Functional Morphology and Kinesiology 2, no. 1: 6. https://doi.org/10.3390/jfmk2010006