Networked Driving Simulation: Applications, State of the Art, and Design Considerations
by
 ,
,
Kareem Abdelgawad
1,* ,
,
Jürgen Gausemeier
1,
Roman Dumitrescu
2,
Michael Grafe
2,
Jörg Stöcklein
2 and
Jan Berssenbrügge
2 1
Heinz Nixdorf Institute, University of Paderborn, 33102 Paderborn, Germany
2
Fraunhofer Institute for Mechatronic Systems Design IEM, 33102 Paderborn, Germany
*
Author to whom correspondence should be addressed.
Designs 2017, 1(1), 4; https://doi.org/10.3390/designs1010004
Submission received: 7 June 2017
/
Revised: 24 June 2017
/
Accepted: 26 June 2017
/
Published: 29 June 2017
(This article belongs to the Special Issue Road Vehicle Safety: Design and Assessment)
Abstract
:Automotive manufacturers and suppliers develop new vehicle technologies to increase traffic safety and transportation efficiency. Autonomous and cooperative vehicle systems are crucial examples of such advanced technologies. The hustle to deploy these fascinating systems onto public roads increases as customer’s expectations rise. Networked driving simulation represents an effective virtual prototyping tool that can support the development, and hence, accelerate system deployment. In networked driving simulation, two or more human-driven virtual vehicles share the same environment and form a very close approximation of real-world traffic interactions. This emerged multi-interactive virtual environment can serve various applications related to the new vehicle technologies and the ever increasing traffic complexity. This paper introduces the promising applications of networked driving simulation and outlines the necessary system design requirements. In addition, the work presents an extensive literature review and evaluation of utilizations of networked driving simulation. Furthermore, three compelling systems of networked driving simulation are analyzed regarding their technical specifications and application scopes. The systems are compared and evaluated using the derived requirements. Finally, potential future work is revealed regarding the design of resilient networked driving simulation systems that can be tailored for possible changes of application requirements.
1. Introduction
Road safety, transportation efficiency, and driving comfort are significant concerns in the automotive realm. Automobile manufacturers and suppliers develop new vehicle systems to support drivers in critical traffic situations, improve traffic flow efficiency, and reduce the driving stress. To support the development, driving simulation is used as a flexible supportive tool for various automotive applications [1]. Virtual traffic scenarios can be created to involve a single human-driven vehicle and other programmed traffic participants. Therefore, driving simulation provides a safe development, testing, and training environment that does not subject drivers or road users to hazards [2]. However, in the era of autonomous and cooperative vehicle technologies, systems are becoming more complex and interactive, while the influence of human drivers still represents a significant factor. Conventional driving simulation lacks the realism required to reflect the multi-interactivity nature associated with the advanced automotive technologies and future traffic environments. It provides only a rough unpredictability level of that which is typically encountered, when multiple human drivers and different technical systems interact in real traffic environments. Hence, driving simulation must keep up in terms of interoperability and shall provide more flexibility and scalability. It is necessary to adapt driving simulation and establish corresponding complex and interactive supportive tools. Networked driving simulation emerges in response to this crucial concern.
This paper introduces the potential scientific applications of networked driving simulation. Moreover, the essential system design requirements are derived and explained. A comprehensive literature review is given together with an analysis and evaluation of three existing systems of networked driving simulation. The ultimate goal is to provide system users and developers with a comprehensive understanding of the different system variants and the offered capabilities. The rest of this paper is structured in five sections. Section 2 introduces the potential applications of networked driving simulation. Section 3 describes the problem and outlines system design considerations. Section 4 presents the state of the art of networked driving simulation. Section 5 provides an evaluation and discussion of the examined state of the art. Finally, Section 6 outlines the conclusions and reveals the future work.
2. Potential Applications of Networked Driving Simulation
Creating a virtual driving environment simultaneously accessed by two or more human drivers delivers a very close replica of real-world traffic interactions. In networked driving simulation, several human-driven vehicles can participate and interact in a common virtual traffic scenario. The following subsections present an identified set of potential applications that can make use of networked driving simulation. These applications stem from the reviewed literature about networked driving simulation. In addition, they reflect the vision of different research and industry partners that work closely with the Heinz Nixdorf Institute on multidisciplinary projects related to the automotive field. In principal, the potential applications of networked driving simulation represent a reasonable extension of the typical applications of conventional driving simulation [2]. Nonetheless, entertainment is an application specifically associated with the gaming industry. This particular industry has objectives irrelevant to traffic safety and transportation efficiency [3]. Therefore, entertainment is not aligned with the serious applications of networked driving simulation addressed in this paper.
2.1. Networked Driving Simulation for Research and Development
The use of conventional driving simulation for research and development purposes is discussed in by the authors of [2]. These purposes can be divided into three application areas: engineering research and development, psychology research, and medical research [2]. The following is a brief highlight of the use of conventional driving simulation and an elaboration of the extended potential role of networked driving simulation in these application areas.
2.1.1. Engineering Research and Development
Conventional driving simulation is used in this field to examine road and infrastructure design, as well as to develop and validate in-vehicle systems [2,4]. On the one hand, the design of road geometry and infrastructure is becoming more complex. It is necessary to involve the influence of multiple human drivers interacting together within the same traffic environment. Networked driving simulation can be utilized in this regard to evaluate the safety levels of complex traffic environments. Moreover, dependency on assumptions typically based on the use of programmed vehicles can be reduced while analyzing various traffic flow effects, such as shock wave and rubbernecking phenomena [5,6]. On the other hand, vehicle systems are becoming more cooperative. Networked driving simulation can be used to interactively validate the interoperability between technologies of different providers. Furthermore, the cooperation between vehicles equipped with different levels of automation or connectivity can be examined [7]. Demonstration and marketing of advanced automotive technologies are crucial concerns that complement the research and development phases. Networked driving simulation can be used to introduce the benefits of these technologies to potential customers in a cost-effective—yet interactive—multi-driver environment.
2.1.2. Psychology Research
Conventional driving simulation is used in this field to address various psychological aspects related to driving [2]. In addition to objective driving parameters, subjective feedback of a human driver is required, for instance, to gain acceptance indications of vehicle systems. Moreover, it is possible to determine the effect of different traffic conditions on a human driver [8]. Various psychological variables can be measured and statistical analysis can be performed. However, drivers are more attentive and they react more realistically, when other human drivers exist in the same traffic scenario. Networked driving simulation can be used to conduct various psychological studies on groups of drivers that participate within the same traffic scenarios. For instance, deeper psychological probes can be conducted on drivers assisted by different automation levels, and hence, showing different road attention levels. The psychology research can achieve more reliable results about the behavioral aspects of drivers to assist the developers of new vehicle technologies.
2.1.3. Medicine Research
Conventional driving simulation is used in the medical field for various purposes, for instance, to study the effects of alcohol or other drugs on driving performance [2]. Other physiological conditions of drivers, such as reduced vigilance and situation awareness, can be examined using driving simulators. However, for comparative research results, networked driving simulation can be used to conduct medical studies simultaneously on several drivers interacting in common traffic scenarios. For instance, the group of drivers can include persons of different ages and experience levels. Moreover, fitness and cognitive ability of drivers to handle the complexity of advanced automotive technologies can be assessed in safe, multi-interactive scenarios [9]. Therefore, the medical research can deliver more substantial outcomes about the physiological aspects of drivers in order to support the advancements in the automotive field.
2.2. Networked Driving Simulation for Training Purposes
Conventional driving simulation is used in driving schools as a training tool, so that beginners can start in safe and controlled environments before subjecting them to real field drives [2,10]. Beginners learn how to handle different situations encountered in real traffic environments. Simulation scenarios are designed to cover various aspects, such as pre-drive checks, traffic rules, and driving in hard weather conditions [11]. Introducing Advanced Driver Assistance Systems (ADAS) functionalities in driving schools has gained particular interest recently [12]. Driving simulators are used in this regard to make drivers familiar with their user interface, as well as to let them understand their limitations [13].
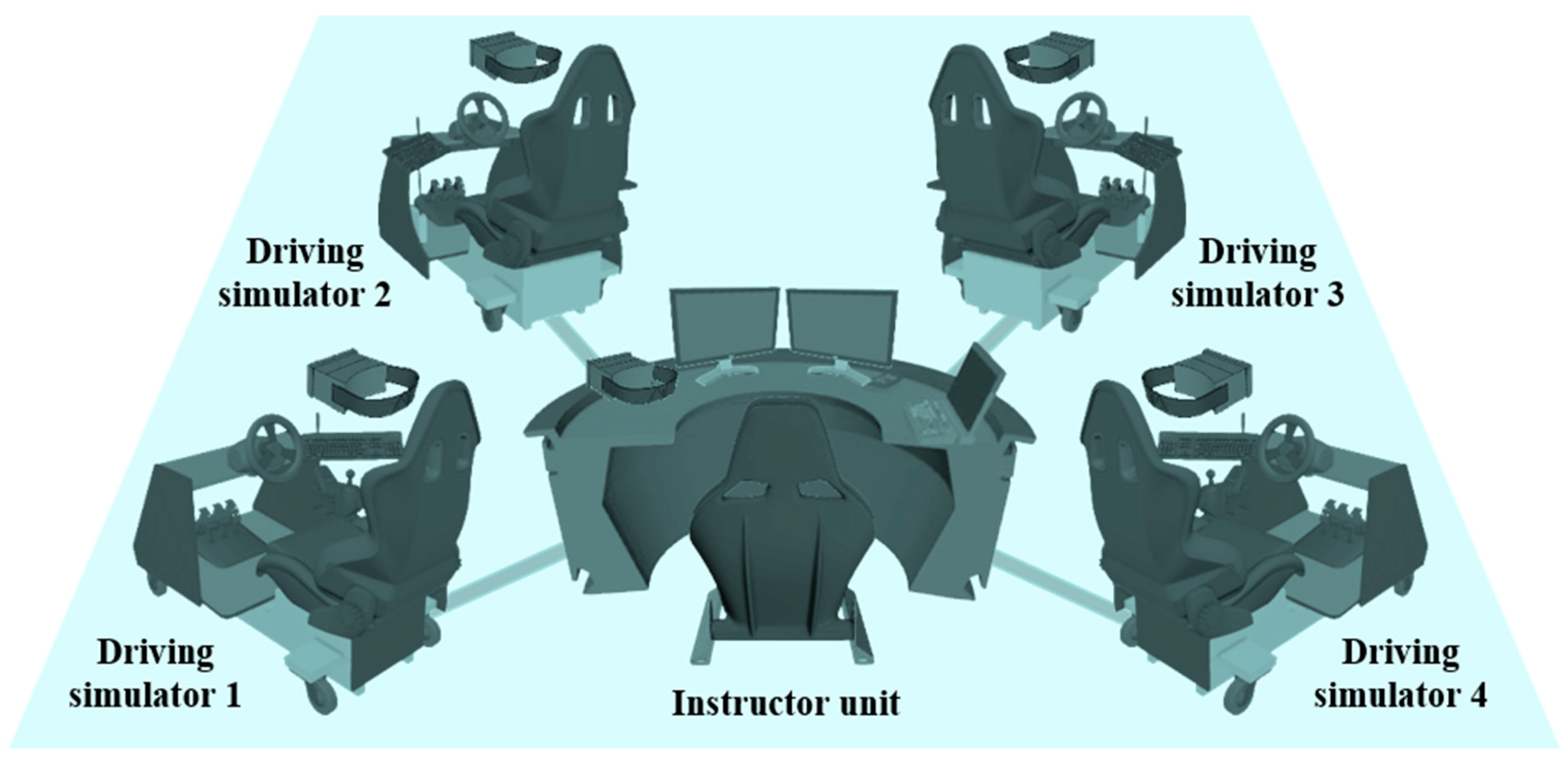
However, with networked driving simulation, conventional driver training can be extended to multi-driver training. Therefore, a driving instructor handles several drivers simultaneously in a life-like traffic environment. Drivers have to react to each other and adapt their driving behavior accordingly. This increased training interactivity enables drivers to act in the same way as in real traffic environments [9]. Yet training many drivers at the same time definitely adds time and cost benefits. Moreover, a driving instructor can participate interactively by performing specific maneuvers to subject drivers to sudden or unpredictable traffic situations. As participants of future traffic environments are becoming more interconnected, networked driving simulation can be used to safely and efficiently learn various advanced automotive technologies without overestimating their capabilities [14]. For instance, Figure 1 shows schematic of a platform of networked driving simulation that can be used in modern driving schools.
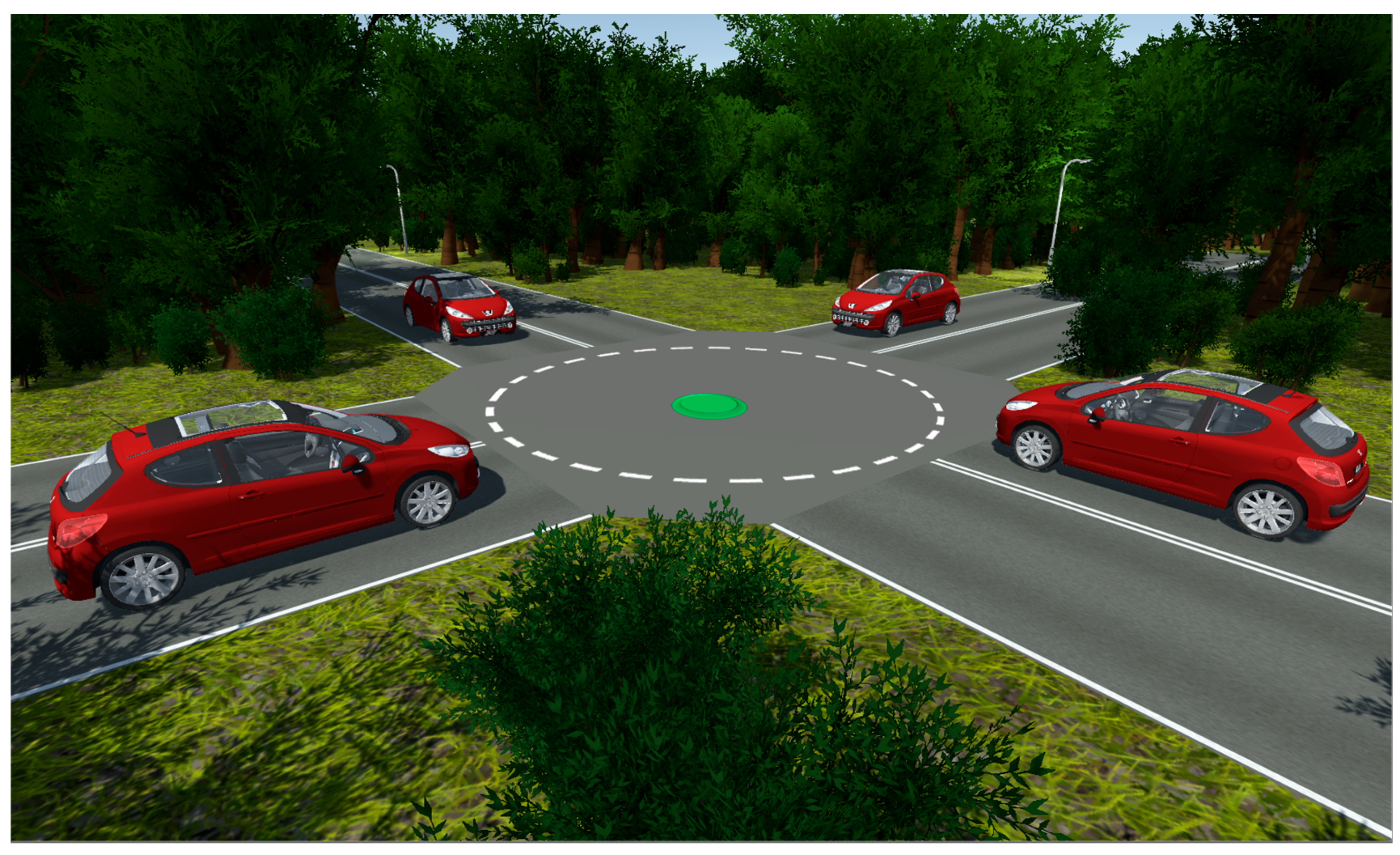
The shown platform consists of a central instructor unit and four networked driving simulators. Driving instructors can use the central unit to handle several trainees at the same time. Figure 2 shows a corresponding virtual environment developed with Unity3D for networked driving simulation. The scenario includes four human-driven virtual vehicles sharing the same 3D environment in a roundabout traffic situation. The vehicles can be equipped with simulation models of vehicle-to-vehicle communication systems. Beyond basic traffic instructions, training with vehicle-to-vehicle communication systems can be conducted in a safe, cost-effective environment at modern driving schools.
Owners of driving schools usually point to the importance of the feasibility aspect of the training facilities [2]. That is, the entire training system shall have reasonable space requirements and remain cost-effective. Among all other components of driving simulators, motion platforms consume a major part of the available budget and require considerable space. Moreover, the operation costs of driving simulators increase substantially if motion platforms are utilized due to the associated huge power consumption. Therefore, driving simulators without motion platforms can be utilized in response to the particular cost and space requirements of driving schools. However, a compromise with these requirements must be found if the utilization of fixed-base driving simulators negatively influences the training effectiveness. In addition, Head-Mounted Displays (HMDs) can be used as the main visualization systems for the drivers [15]. Rapid advancements in the field of virtual and augmented reality pushed the produced HMDs to be cheaper and have lighter weights. These characteristics contribute to the fulfillment of the particular cost and space requirements of driving schools.
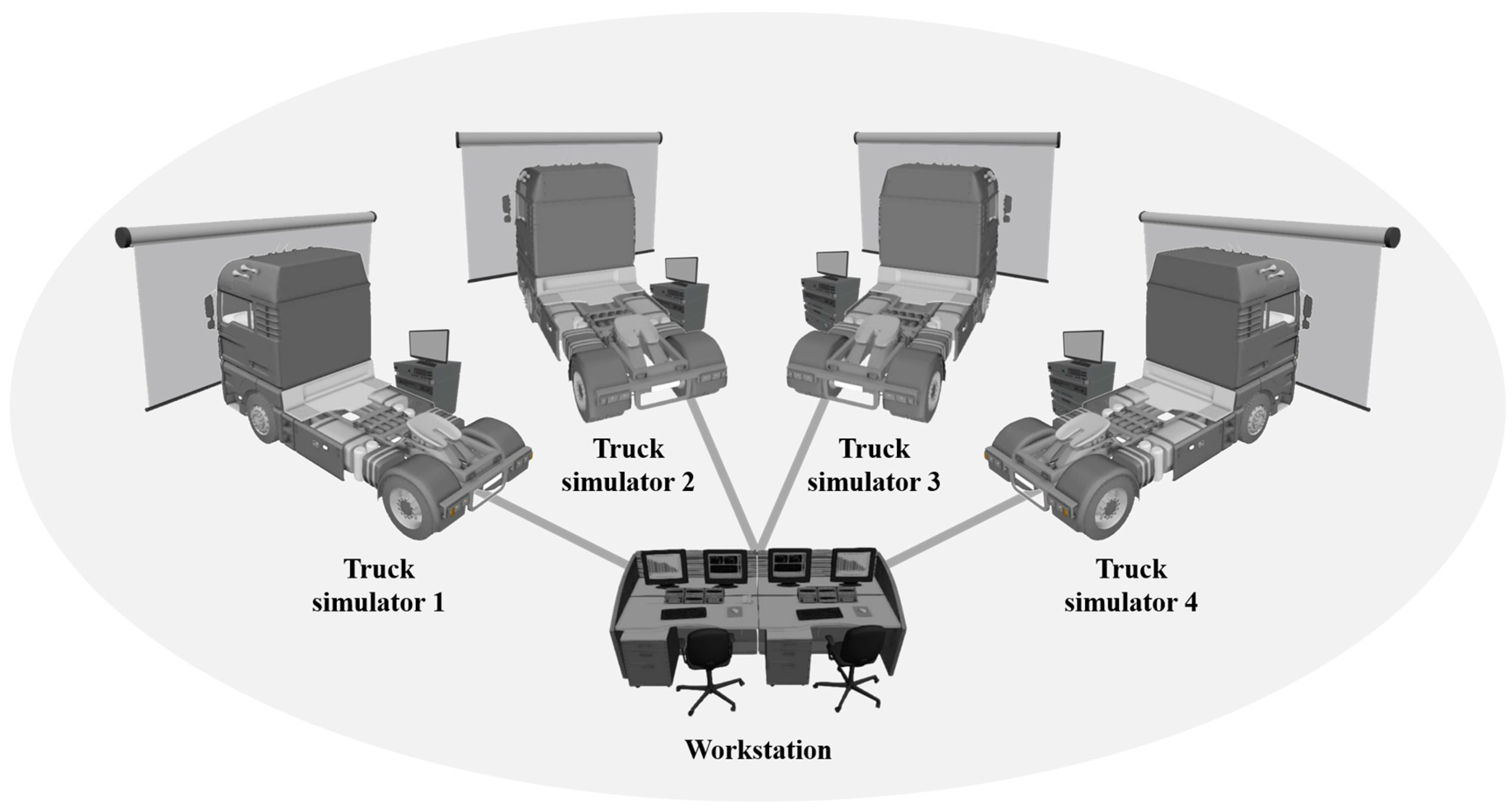
Facilities of networked driving simulation can be used to serve more than one application, provided that they exhibit a good extent of system flexibility. For instance, Figure 3 shows a schematic of a simulation facility that can be utilized for various interactive applications related to the truck-platooning topic, such as development, testing, training, and demonstration.
Truck-platooning is a promising technology that results in lower fuel consumption, as the heavy trucks drive closer together at a constant speed, without frequent braking and accelerating. However, the development and testing in real traffic environments are unsafe and impractical. The platform shown in Figure 3 represents a safe, practical alternative. It consists of a central workstation and four networked truck driving simulators. The workstation is utilized to provide control and monitoring operations on the platform. That is, the simulation operator can make commands to stop and start the system. Moreover, the simulation operator can monitor various signals that give indications about the operation and performance of the system, as well as the interaction of the drivers. In addition, the workstation can include a traffic simulator to generate traffic participants, such as programmed vehicles and pedestrians, in order to add more complexity to the multi-driver traffic scenario. To be feasible to a greater extent, the platform shown in Figure 3 can incorporate out-of-service trucks as stationary driving platforms. In addition, the visualization systems can be low-cost projectors. Figure 4 shows a corresponding virtual environment developed with Unity3D for networked driving simulation. Four human-driven virtual trucks follow each other forming a platoon on a narrow highway.
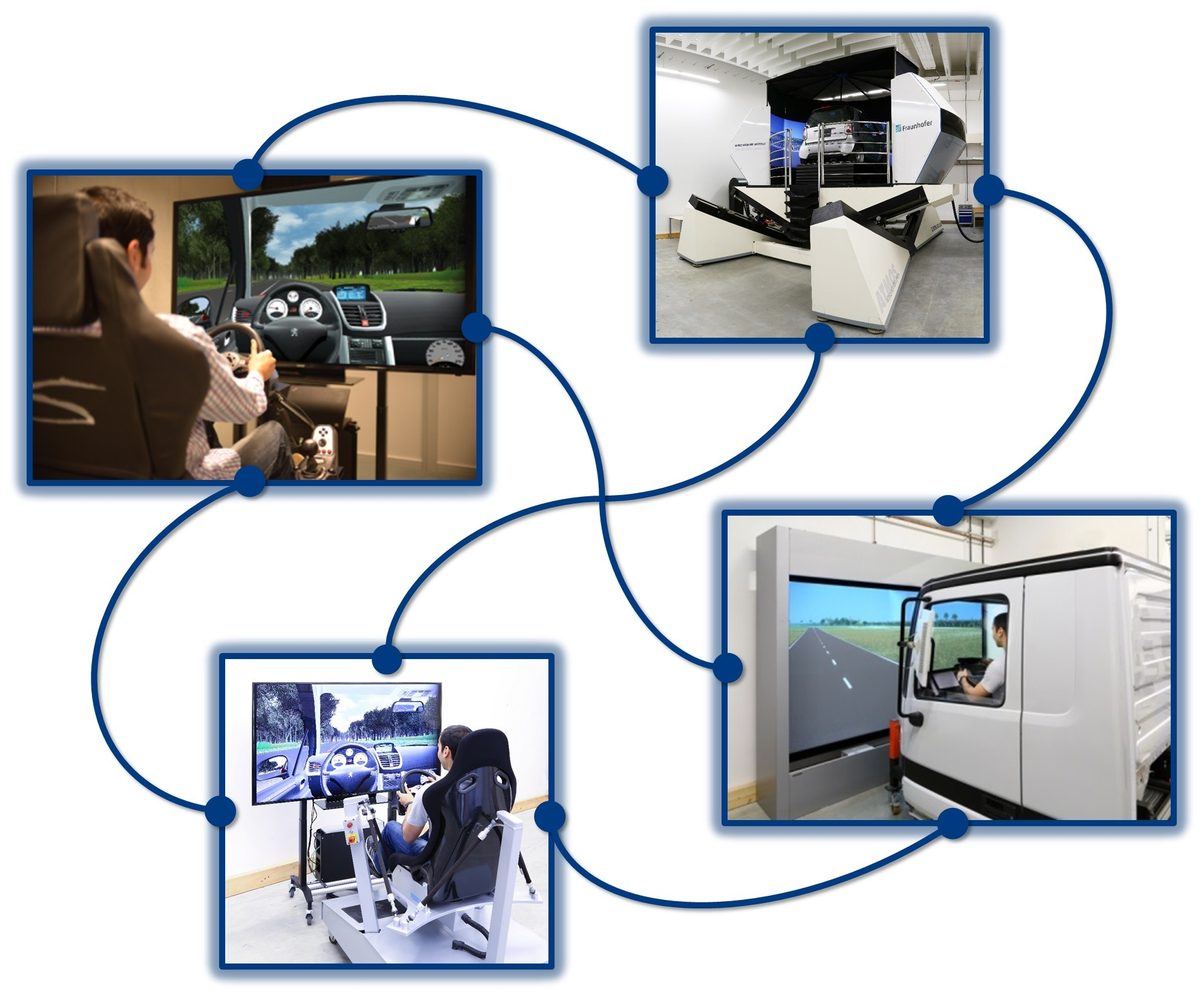
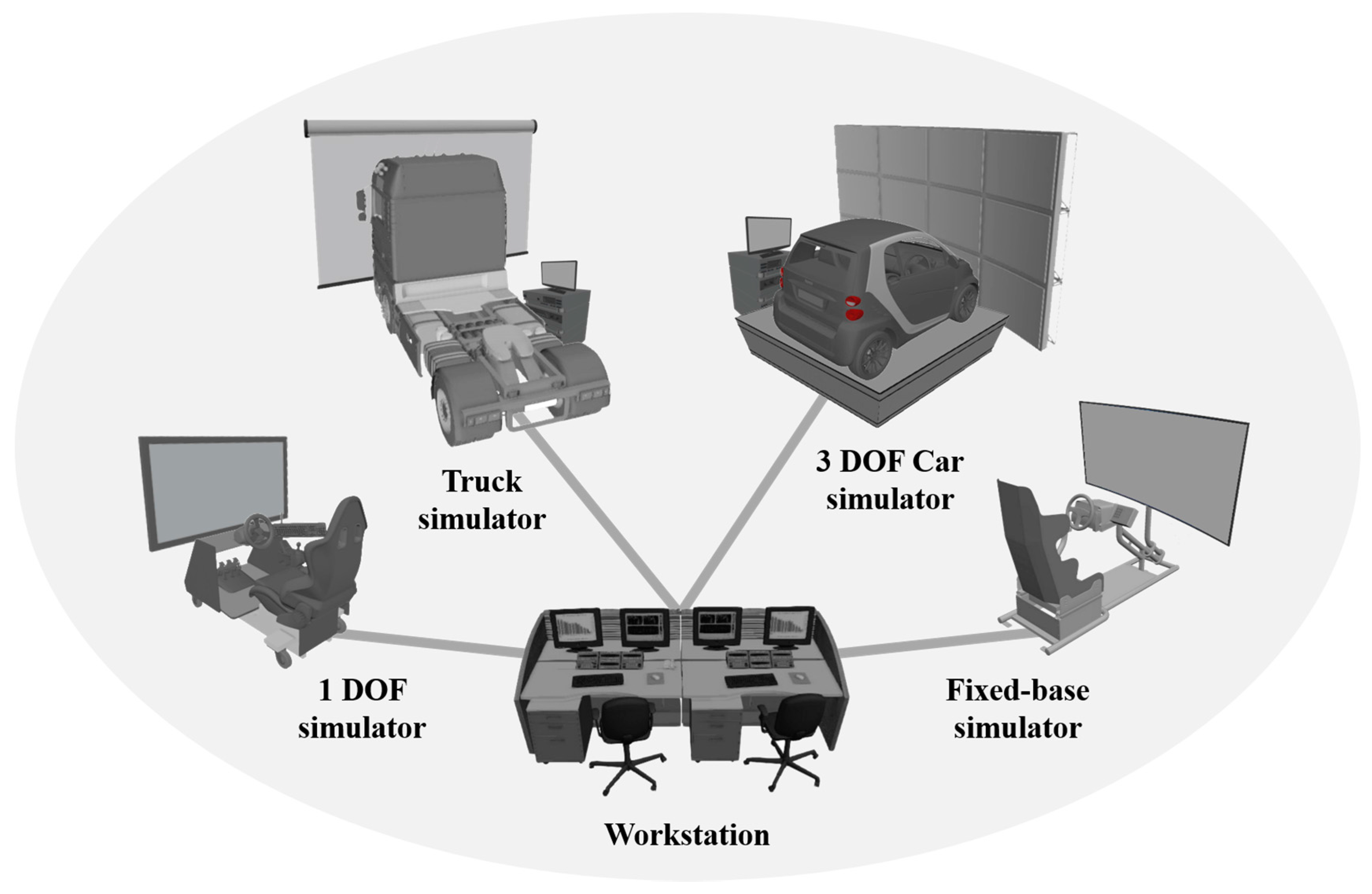
Figure 5 shows another schematic of a platform of networked driving simulation that can be utilized to address diverse questions related to the evolution of traffic environments in general and the advancement of automotive technologies in particular.
The applications of networked driving simulation may impose different requirements regarding the fidelity levels of the participating driving simulators. The platform shown in Figure 5 combines systems of different complexity grades and fidelity levels in one driving simulation facility in order to serve various applications. More specifically, the platform consists of a passenger car simulator, truck simulator, fixed-base driving simulator, and a workstation. In addition to typical control and monitoring operations, the workstation can include a database console that captures and saves the simulation data for after-action-review and analysis. The following section describes the problem and outlines a set of crucial requirements of networked driving simulation systems.
3. Problem Description and System Requirements
Research and development in the automotive sector in general is multidisciplinary by its nature. Yet the problem is becoming more complex, due to the introduction of future highly automated and connected vehicle systems [16,17]. Performing an effective system analysis to support decisions becomes challenging and unmanageable due to the involvement of heterogeneous interacting systems. Networked driving simulation shows a great potential to overcome the obstacles facing the research and development in advanced automotive areas. It is an efficient virtual prototyping tool that can provide collective understanding of the complex and fast interactions of future traffic systems. Thus, decisions in technological, socio-economic, and regulatory contexts can lead to the expected outcomes. However, platforms of networked driving simulation consist of various constituent systems. These constituent systems are complex and involve multidisciplinary aspects, which lead particularly to an increased overall design complexity. Moreover, the problem becomes worse if system modifications are necessary in response to changes of application requirements. A clear impediment resists system users and developers to progress in the area of networked driving simulation. Therefore, a generic set of system requirements must be determined clearly before establishing systems of networked driving simulation. Several workshops at the Heinz Nixdorf Institute and Fraunhofer Institute were held to analyze the significant design considerations of networked driving simulation systems. The workshops included experts from various research and industry partners working in the automotive field. The following set of crucial system requirements and design considerations were derived based on the system of systems formation practices and guidelines presented by the authors of [18]:
- Systematic approachThe design of networked driving simulation shall follow a systematic approach. This systematic approach shall help developers to determine the necessary fidelity levels and capabilities of the constituent systems, and hence, the complexity of the overall system.
- Open system interfaceThe platforms of networked driving simulation shall conform to the open interface principle. This results in open systems that have permeable boundaries. Consequently, the exchange of information with constituent systems eventually added in future shall be allowed through a straightforward integration process. This requirement can be realized by the utilization of standard interfacing or networking techniques, such as High-Level Architecture and Distributed Interactive Simulation [19,20].
- Configurability principleThe platforms of networked driving simulation shall ensure a good extent of configurability to sustain themselves against eventual changes in requirements. This feature can be realized, for instance, through the utilization of configurable constituent systems.
- Modularity principleThe platforms of networked driving simulation shall have a good extent of modularity. This means that each constituent system shall perform a major specific task or function independently. Constituent systems performing more than one task or function are not preferred due to associated complexity of system adaptation.
These particular requirements are necessary to establish resilient systems of networked driving simulation. That is, they ensure the desired flexibility and scalability of networked driving simulation systems, which can sustain themselves against eventual changes of application requirements. The following section presents a comprehensive review and analysis of the state of the art of networked driving simulation. Three selected systems of networked driving simulation are evaluated in the following section using the determined set of requirements.
4. State of the Art Review and Analysis
The topic of driver-driver interaction and multiple-user driving simulation has attracted great attention from researchers. The following subsection gives an extensive review of literature that presents examinations or experiments using networked driving simulation. The utilized systems are described together with the purposes of use.
4.1. Networked Driving Simulation in Literature
Several studies have made use of networked driving simulation for a diverse range of research questions, which mainly address the interaction between human drivers. For example, a framework for realistic traffic flow simulation was proposed in study [21]. The framework includes two types of programmed vehicles. One type of traffic vehicles is operated by basic driver models that simulate the traffic flow in far-field areas. The other type of traffic vehicles is operated by cognitive driver models that simulate near-field areas. The latter type of driver models provides more human-like behavior. Moreover, the simulation framework allows the participation of two driving simulators within the same virtual traffic scenario. These are simple desktop driving simulators with commercial wheel-transmission-pedals sets. The framework is used to study drivers’ behavior while traveling with advanced traffic vehicles of human-like behavior. An approach for a multi-driver simulation is described by the authors of [16]. The system is used to study the effects of cooperative ADAS on drivers’ subjective feelings, such as, e.g., driving excitement. Up to five persons can drive simultaneously in the same virtual environment. The network of this platform consists of 25 personal computers connected via gigabit Ethernet. The platform uses the commercial software SILAB. The term SILAB is an acronym that stands for ‘Simulation Laboratory’. This software has been developed by Würzburg Institute for Traffic Sciences GmbH in Würzburg, Germany. A study to examine the differences in driving behaviors during changing lanes is presented in study [22]. The work used a networked simulation framework based on the SIGVerse simulator environment [23]. The term SIGVerse is an acronym that stands for “Social, Intelligence, and Genesis Verse”. The cooperative behavior of drivers under different conditions, such as the availability of lanes, was examined in study [24]. The study used the MoSAIC platform. The term MoSAIC is an acronym that stands for “Modular and Scalable Application Platform for ITS (Intelligent Transportation Systems) Components”. It is a multi-driver simulation environment where three driving simulators are integrated into the same framework. Another study on a multi-user driving simulation environment is presented in study [25]. Four low-cost connected driving simulators were used to test how voice-based command systems, such as GPS-based assistance systems, influence the driving behavior at intersections. Various examinations of collision-likely driving conditions are presented by the authors of [26]. The studies were performed on drivers, who meet each other in a situation that has a strong potential for a collision. The work used a simulation platform that utilizes two adjacent full-vehicle simulators sharing a common virtual world. Two linked driving simulators were used in study [27] to analyze interactions at intersections. While one of the drivers can be a normal participant, the other driver adapts his driving behavior to this participant in order to form a safety-critical situation. A study for anxiety experience while driving with traffic light assistant is presented in study [28]. The work used the multi-driving simulation environment at WIVW GmbH, where four drivers can participate in the same virtual environment. The term WIVW is a German acronym that stands for “Würzburger Institute for Traffic Science”. An examination of Intelligent Transportation Systems using driving simulators is presented in study [29]. The work used multiple-seat driving simulation platform, in which several human drivers interact in the same virtual environment. The platform consists of three networked training simulators. These are fixed-base simulators with real vehicle mock-ups. A platform composed of two simple fixed-base driving simulators and an integrated traffic simulator has been introduced in study [30]. The system is used to conduct experiments on drivers’ behavior in realistic traffic environments. Another simple environment of multi-driving simulators is presented by the authors of [31]. The setup consists of several simple PC-based driving simulators, where 3D Max and Virtools modeling software were used to build the virtual driving scenes [32]. It is used to conduct experiments on dynamic speed guidance strategies, such as green wave speed and eco-driving speed guidance strategies. A framework for driving behavior studies using multi-user networked 3D virtual environments is provided in study [33]. It incorporates simple driving simulators and uses the Scenario Markup Language (SML) to specify dynamic traffic situations. The framework can be used to examine interactive car-following behavior of drivers. All these studies used relatively small or low-cost systems of networked driving simulation for temporary studies and examinations. The following section analyzes a selection of larger and more complex platforms of networked driving simulation together, along with their purposes of use.
In addition to the reviewed scientific studies, there are several commercial or ready solutions in the market to establish facilities of networked driving simulation. For instance, COCODRIS (Cooperative Competitive Distributed Simulator) is a training station based on real-time cooperative driving simulation. It has been developed by Liophant Simulation in Savona, Italy. The software simulates vehicles and handling equipment in networked multi-operator environments. It is used mainly for virtual logistics training and education purposes to reduce the need for training with real equipment. Moreover, COCODRIS provides different training environments, such as, e.g., urbans, construction yards, terminals, highways, and country roads. Nonetheless, almost all existing commercial solutions are closed or protected products. It is difficult to find much information about the implementation or the underlying concepts. Moreover, adapting commercial software packages for specific requirements can be carried out only by the vendors.
4.2. Existing Platforms of Networked Driving Simulation
Several automotive associations incorporate relatively large and complex platforms of networked driving simulation for distinct applications. In this section, three compelling platforms of networked driving simulation are analyzed with respect to their technical specifications, capabilities, and application scopes. These particular systems were selected for analysis as they represent permanent non-commercial solutions that are used since many years for conducting extensive automotive studies. In addition, the selected systems exist at very well-known, competent research centers in three different countries.
4.2.1. Multi-Driver Simulation Lab at DLR
The first example facility is the Multi-driver Simulation Lab operated by the Institute of Transportation Systems of the German Aerospace Center (DLR). Researchers from various fields such as engineering, psychology, and computer sciences develop automotive and railway systems, as well as traffic management strategies at the Institute of Transportation Systems. With its Multi-driver Simulation Lab specifically, three human drivers can interact within the same virtual environment to form realistic traffic scenarios [34]. The simulation facility was established in 2010; different research projects are conducted to improve future traffic safety and efficiency.
Technical Description
The facility for networked driving simulation at the DLR includes three similar driving simulators and a workstation as shown in Figure 6. It operates with the DOMINION software architecture of the DLR, the MoSAIC framework, and the Virtual Test Drive (VTD) simulation environment of VIRES Simulationstechnologie GmbH. The DOMINION software architecture is used to facilitate the integration between applications of various development phases. MoSAIC is a flexible architecture for multi-driver simulation [35]. The MoSAIC framework allows existing driving simulators to be linked together and operated from a central workstation. VTD stands for Virtual Test Drive; it is modular tool for the development, test, and demonstration of different vehicle technologies, such as advanced driver assistance systems [36].
The participating driving simulators are fixed-base systems with driving seats. The visual field is formed by three front monitors that together provide 150 degrees of forward vision. A virtual rearview mirror is embedded within the middle front monitor. A LCD screen (10-inch) represents the left-side mirror. A digital instrument panel provides the main vehicle states, such as, e.g., speed, motor rpm, as well as different states of the simulated driver assistance systems. The driving simulators have active steering wheels that provide haptic feedback up to 38 Nm and active pedals that deliver haptic feedback up to 28 Nm. A camera monitors the test persons and delivers the video data to the central workstation. A total of 26 computers carry out the whole simulation, visualization, monitoring, and analysis tasks.
Application Scope
Apart from the technical demands of their development, the introduction of cooperative assistance systems is challenged by the complexity of the human–machine and human–human interactions. Although these systems are designed to reduce the burden on drivers, the complexity of user interface grows with increasing automated and cooperative functionalities. This demands some of driver’s attention and introduces more cognitive loads. Researchers working on the multi-driving simulation environment at the Institute of Transportation Systems are concerned mainly with the behavior analysis of human drivers interacting together within the same virtual driving scenario. Specifically, interactions of drivers assisted by different levels of automation are examined using this multi-driving simulation environment. Substantial simulation data are recorded and analyzed. The results are used to conduct design enhancements of the human–machine interface, and hence, increase system acceptance and usability.
4.2.2. Tokyo Virtual Living Simulation Lab at NII
Tokyo Virtual Living Lab at the National Institute of Informatics (NII) is an experimental space based on 3D Internet technology [37]. Researchers of this laboratory conduct controlled driving and travel studies that involve multiple users interacting in the same shared space. Users can interactively experience different innovative transportation technologies. The utilized networked 3D environment is called 3D (social) virtual world or 3D Internet [38]. Using this 3D Internet technology, users are represented as “avatars” (graphical self-representations) and share the same 3D space. They can interact with the environment and other avatars in a natural way. In principle, the virtual living lab can be accessed from anywhere.
Technical Description
The laboratory at the National Institute of Informatics (NII) depends mainly on the Distributed Virtual Environments middleware (DiVE) to create multi-user networked 3D virtual spaces [39]. This middleware has a centric architecture that presents a scalable and cross platform communication between different simulators. A core component of the simulation environment is the navigation network. This includes all information required for the traffic simulation. The navigation network and a corresponding 3D road network are created automatically using the OpenStreetMap (OSM) and CityEngine tools respectively. OSM is an open source tool for creating geographic data based on crowdsourcing [40]. CityEngine is a commercial 3D modeling software for generating 3D urban environments [41]. Moreover, a traffic simulator is used to generate programmed vehicles. These vehicles travel along the road network, where road markings and traffic signals and signs are considered. The traffic simulation is networked with a multi-user driving simulation. More than one driving simulator of low-fidelity levels can be integrated in the same virtual environment as shown in Figure 7. These are desktop driving simulators that include commercial low-cost wheel-pedals sets that provide sufficient physical feedback and control cues.
Application Scope
A comprehensive 3D replica of Tokyo was built in the virtual living laboratory at NII to perform experiments including more than one human driver. The general aim of the developed virtual environment it to analyze interactive driving behavior in future smart cities. For instance, empirical studies with human drivers are conducted to examine the impact of eco-friendly traffic and “normal” (none-eco) traffic on human drivers and how human drivers interact in different cases. For this purpose, the iCO2 software tool was developed by the NII with Unity3D based on the DiVE middleware architecture [42]. Unexpected traffic situations are created as human drivers interact with each other and with programmed vehicles. One example scenario is to drive as far as possible with a given amount of fuel. Drivers must travel in an eco-friendly way by accelerating and decelerating smoothly and keeping the provided speed limits.
4.2.3. Driving and Bicycling Simulation Lab at OSU
The Driving and Bicycling Simulation Lab at the Civil and Construction Engineering College, Oregon State University (OSU), represents another compelling example facility. In this advanced simulation facility, two human drivers can interact in the same virtual environment. The simulation facility was constructed in collaboration with Realtime Technologies, Inc., Ann Arbor, MI, USA in 2010.
Technical Description
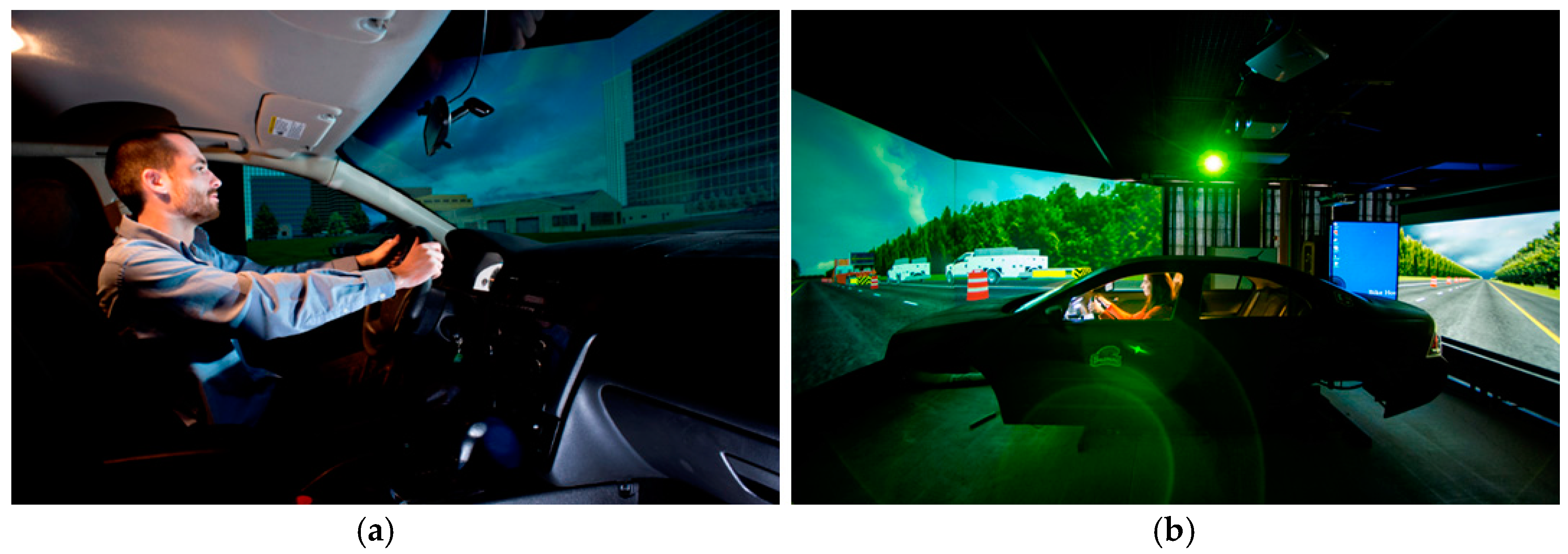
The first main component in the facility at OSU is the high-fidelity driving simulator shown in Figure 8. It is moving-base simulator with an electric pitch motion system that rotates ±4 degrees about the focal point of the driver’s eye 43. The motion system simulates the acceleration and deceleration on tangent road segments.
The dynamics computer system consists of a quad-core host that runs SimCreator Software from Realtime Technologies, Inc. With this software, vehicle dynamics are simulated by a 15 degrees of freedom multi-body vehicle model and a Pacejka tire model. The visualization system includes three front projectors with a resolution of 1400 × 1050; they provide 180 degrees of forward vision. LCD screens are integrated in both side-view mirrors and a rear projection system provides the scenes for the center rearview mirror. The driver’s platform is a Ford Fusion cabin (model 2009) with a digital configurable instrument panel. A steering control loading system is used to represent steering torques based on vehicle speed and steering angle. The vehicle cabin is mounted on the pitch motion system. The driver’s foot position, face, hands, and the overall driving environment are captured with four separate cameras. These deliver video data to a four-way digital video recorder at a sampling rate of 60 Hz to be used for session assessment. Moreover, eye movement data are collected using the Mobile Eye-XG platform from Applied Science Laboratories. This platform allows drivers to have unconstrained eye and head movement.
The second main component within the facility of OSU is the bicycling simulator shown in Figure 9. It is the only bicycling simulator that can be operated simultaneously with a driving simulator in the same virtual environment. The braking, pedaling, and steering inputs from the cyclist are reflected in the visual scene. The visualization system includes one front projector and an LCD display representing a rearview mirror.
Application Scope
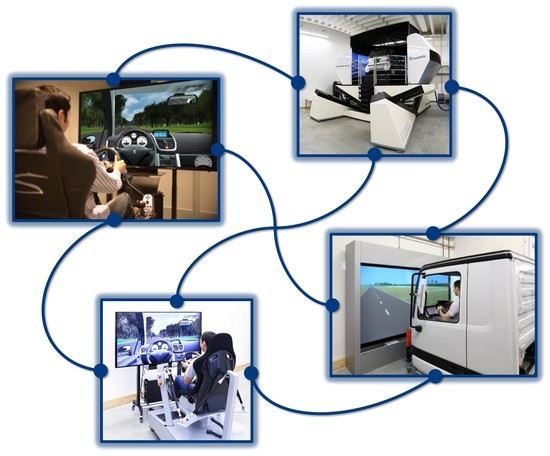
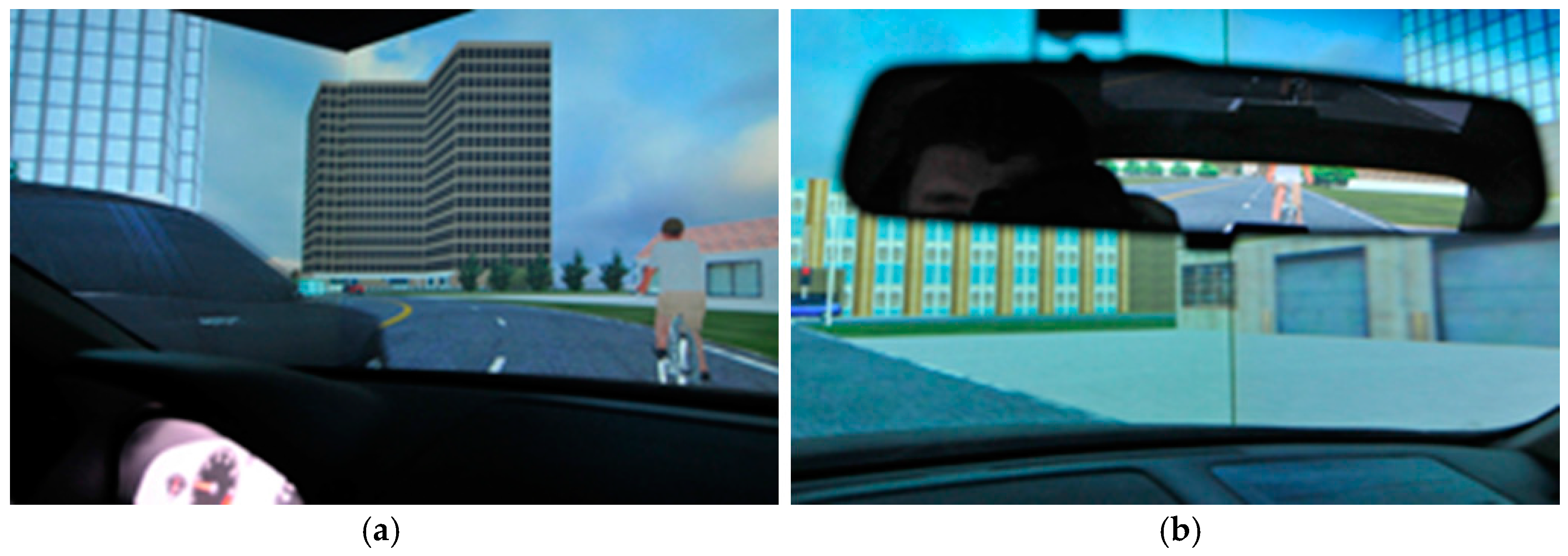
Researchers working in the Driving and Bicycling Simulation Lab at OSU are concerned in general with the safety issues of transportation systems from a multi-modal perspective. Due to the complexity of transportation problems, examinations in this laboratory are interdisciplinary and require expertise from different domains, such as, e.g., transportation engineering, human factors, psychology, and medicine. This laboratory is an experimental tool to address the behavior of road users. The target of analysis is to improve the operation and safety level of transportation systems. When it comes to driving and biking safety in particular, one of the challenges for civil engineers is predicting when and how crashes occur. There is relatively little substantial data about driver-biker interactions. Hence, the OSU utilizes the driver–biker simulation facility mainly to solve this conundrum [44]. To that end, the driving and bicycling simulators are networked to share the same virtual environment. Figure 10 shows two virtual scenarios including a vehicle and a bicycle that are controlled by humans.
Using these networked driving and bicycling simulators, specific crash scenarios can be generated to collect a robust set of data. The data collected from both networked simulators can be used to design safer transportation systems and more effective traffic infrastructure to reduce possible fatal crashes. The following section presents an extensive evaluation of the analyzed systems of networked driving simulation.
5. Evaluation and Discussion
The conducted comprehensive analysis provided insight into the design of the selected systems and their possible application scopes. This has been used to evaluate the analyzed systems with respect to the deduced design considerations. With respect to the Multi-Driver Simulation Lab at DLR, different multi-interactive traffic scenarios can be created in general. Moreover, vehicles equipped with different assistance functions can be simulated. However, the utilized driving simulators in this platform have the same fidelity level. Due to the predetermined platform scale and structure, varying the fidelity levels of the building components is troublesome. Moreover, the network connecting the three driving simulators uses Ethernet as a typical communication technology with predetermined network characteristics. In addition, no standard architectures for networked simulation are utilized. Eventual future system extensions or modifications according to scientific methods are not envisaged. Therefore, only a limited set of application scenarios for networked driving simulation is considered with this platform.
With respect to the Tokyo Virtual Living Simulation Lab at NII, various scenarios can be created with different traffic densities in general. Principally, geographically distributed participants can join the shared simulation environment. However, the currently utilized driving simulators have similar fixed low-fidelity level. No particular scientific consideration is given to determine the fidelity level of the participating driving simulators. Moreover, the network connecting the simulators of the laboratory utilizes the Ethernet communication technology and presents predetermined networking capabilities. Furthermore, a non-standard architecture for networked simulation is utilized. Hence, integrating additional simulators to the environment may be burdensome and requires particular experience with the developed environment. Extending or modifying the whole simulation environment does not follow a particular methodology. Therefore, addressing other application scenarios for networked driving and traffic simulation is not applicable.
With respect to Driving and Bicycling Simulation Lab at OSU, the used driving simulator exhibits a fixed high-fidelity level. However, for the bicycling simulator, three different bicycles (men, women, and children-size bicycles) can be used to increase the demographic variety of subjects. Various scenarios can be created to invoke different collision-likely situations. However, no actual basis was used to determine the necessary fidelity levels of the building components before establishing the simulation facility. Moreover, the network connecting the simulators utilizes Ethernet as a typical communication technology with fixed networking characteristics. Additionally, no particular scientific methodology is followed for extending or modifying the whole simulation environment. Hence, an adequate consideration of other application scenarios of networked driving simulation is not feasible. Table 1 summarizes the final evaluation results of the analyzed systems of networked driving simulation using the set of requirements discussed in Section 3.
The reviewed literature and the analyzed platforms do not follow any systematic approaches to determine the necessary fidelity levels of the constituent systems and building components of networked driving simulation. This aspect presents a critical drawback that hinders the delivery of substantial simulation results. The following section outlines the conclusions and reveals the future research work in this regard.
6. Conclusions and Future Work
This work addressed the utilization of networked driving simulation for different scientific applications. The industry of networked games was excluded as it is mostly concerned with the entertainment factor, which is not the focus of the automotive field. Principally, networked driving simulation presents an intelligible solution to examine various aspects concerning the future traffic and transportation systems. However, according to the thorough literature review and analysis, no rigorous methodological approaches or design tools exist to date. Networked driving simulation fulfills the definition of system of systems (SoS) architectures [45]. Specifically, two or more constituent systems exchange information and share the same virtual environment. A common system goal is accomplished through their collaboration within the system of systems environment. In general, successful SoS must be able to evolve in order to accommodate potential changes in application requirements [45]. The evolution of SoS can be realized by adding more constituent systems or modifying the characteristics of existing building components [16,17]. However, this imposes a challenging demand on SoS architecting to offer a possibility of adaptation. Classical system architecting becomes neither sufficient nor effective in the era of heterogeneous networked systems [45]. SoS architecting necessitates broader design considerations to supplement the typical system development processes. Systems engineering can be utilized to overcome the challenges of SoS architecting and development [45]. As potential future work, a system-level design framework will be developed. This framework will enable the development of resilient platforms of networked driving simulation. The application requirements will be considered to deduce the necessary fidelity levels of the constituent systems. In particular, the key principles of systems engineering for an open system architecture, as well as a measure for building multidisciplinary system models will be considered in this design framework.
Acknowledgments
The presented work was carried out by the authors during collaborative research and development activities at the Heinz Nixdorf Institute and the Fraunhofer Institute in Paderborn, Germany. No necessary special or external funding resources were acquired to produce or publish the research and development outcomes of this work. The authors acknowledge the valuable consultation and support of dSPACE GmbH, Varroc Lighting Systems GmbH, Aerosoft GmbH, VDL Bus & Coach GmbH, Fahrerakademie Paderborn, HAINER driving school, and Ringhoff driving school.
Author Contributions
Kareem Abdelgawad introduced the potential applications, derived the design requirements, analyzed and evaluated the literature, and wrote the paper. Jürgen Gausemeier and Roman Dumitrescu directed the research topic and examined the general system design considerations. Michael Grafe contributed to the evaluation process. Jörg Stöcklein and Jan Berssenbrügge developed the visualization environments. The latter five authors examined the work and reviewed the paper.
Conflicts of Interest
All authors declare no conflict of interest.
References
- Abdelgawad, K.; Abdelkarim, M.; Hassan, B.; Grafe, M.; Gräßler, I. A Modular Architecture of a PC-Based Driving Simulator for Advanced Driver Assistance Systems Development. In Proceedings of the 15th IEEE International Workshop on Research and Education in Mechatronics (REM2014), El Gouna, Egypt, 9–11 September 2014; ISBN 978-1-4799-3030-2. [Google Scholar]
- Fisher, D.; Caird, J.; Rizzo, M.; Lee, J. Handbook of Driving Simulation for Engineering, Medicine, and Psychology; CRC Press Taylor & Francis Group: Boca Raton, FL, USA, 2011; pp. 1-1–1-16. ISBN 978-1-4200-6100-0. [Google Scholar]
- Quandt, T.; Kröger, S. Multiplayer: The Social Aspects of Digital Gaming, 1st ed.; Routledge, Taylor & Francis Group: Abingdon, UK, 2014; pp. 3–9. ISBN 978-0-415-82885-7. [Google Scholar]
- Abdelgawad, K.; Hassan, B.; Berssenbrügge, J.; Stöcklein, J.; Grafe, M. A Modular Architecture of an Interactive Simulation and Training Environment for Advanced Driver Assistance Systems. Int. J. Adv. Softw. IARIA 2015, 8, 247–261. [Google Scholar]
- Wolshon, B.; Pande, A. Traffic Engineering Handbook: Institute of Transportation Engineers, 7th ed.; Wiley & Sons: Hoboken, NY, USA, 2016; pp. 217–225. ISBN 978-1-118-76230-1. [Google Scholar]
- Chraibi, M.; Boltes, M.; Schadschneider, A.; Seyfried, A. Traffic and Granular Flow ’13, 1st ed.; Springer: Cham, Switzerland, 2015; pp. 533–539. ISBN 978-3-319-10628-1. [Google Scholar]
- Watzenig, D.; Horn, M. Automated Driving: Safer and More Efficient Future Driving, 1st ed.; Springer: Cham, Switzerland, 2017; pp. 29–40. ISBN 978-3-319-31893-6. [Google Scholar]
- Yamaguchi, M.; Wakasugi, J.; Sakakima, J. Evaluation of Driver Stress Using Biomarker in Motor-Vehicle Driving Simulator. In Proceedings of the 28th Annual International Conference on Medicine and Biology Society (EMBS), New York, NY, USA, 16–19 September 2006; pp. 1834–1837, ISSN:1557-170X. [Google Scholar]
- Farmer, E.; van Rooij, J.; Riemersma, J.; Jorna, P. Handbook of Simulator-Based Training, 1st ed.; Routledge, Taylor & Francis Group: Abingdon, UK, 1999; ISBN 978-0754611875. [Google Scholar]
- Kandhai, K.; Smith, M.; Kanneh, A. Immersive Driving Simulation for Driver Education and Analysis. In Proceedings of the 16th International Conference on Computer Games (CGAMES), Louisville, KY, USA, 27–30 July 2011; ISBN 978-1-4577-1451-1. [Google Scholar]
- Imamura, T.; Ogi, T.; Lun, E.T.C.; Zhang, Z.; Miyake, T. Trial Study of Traffic Safety Education for High School Students Using Driving Simulator. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Manchester, UK, 13–16 October 2013; ISBN 978-1-4799-0650-5. [Google Scholar]
- Ogitsu, T.; Mizoguchi, H. A Study on Driver Training on Advanced Driver Assistance Systems by Using a Driving Simulator. In Proceedings of the International Conference on Connected Vehicles and Expo (ICCVE), Shenzhen, China, 19–23 October 2015; ISBN 978-1-5090-0264-1. [Google Scholar]
- Panou, M.C.; Bekiaris, E.D.; Touliou, A.A. ADAS Module in Driving Simulation for Training Young Drivers. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems (ITSC), Funchal, Portugal, 19–22 September 2010; ISBN 2153-0009. [Google Scholar]
- Maag, C.; Muhlbacher, D.; Mark, C.; Kruger, H.P. Studying Effects of Advanced Driver Assistance Systems (ADAS) on Individual and Group Level Using Multi-Driver Simulation. IEEE Intell. Transp. Syst. Mag. 2012, 4, 45–54. [Google Scholar] [CrossRef]
- Beasley, H.H.; Harding, T.H.; Martin, J.S.; Rash, C.E. Laboratory system for the evaluation of helmet-mounted displays. In Proceedings of the SPIE, the International Society for Optical Engineering, Orlando, FL, USA, 12–13 September 2004; Volume 5442, ISBN 9780819453655. [Google Scholar]
- Dumitrescu, R.; Anacker, H.; Gausemeier, J. Design Framework for the Integration of Cognitive Functions into Intelligent Technical Systems. In Proceedings of the 1st Joint International Symposium on System-Integrated Intelligence, Hannover, Germany, 27–29 June 2012. ISSN:0944-6524. [Google Scholar]
- Dumitrescu, R.; Jürgenhake, C.; Gausemeier, J. Intelligent Technical Systems OstWestfalenLippe. In Proceedings of the 1st Joint International Symposium on System-integrated Intelligence, Hannover, Germany, 27–29 June 2012. ISSN:0944-6524. [Google Scholar]
- DiMario, M.J. System of Systems Collaborative Formation, 1st ed.; World Scientific Publishing: Singapore, 2010; pp. 29–62. ISBN 978-981-4313-88-9. [Google Scholar]
- Wang, W.; Xu, Y.; Chen, X.; Li, Q.; Wang, W. High level architecture evolved modular federation object model. J. Syst. Eng. Electron. 2009, 20, 625–635. [Google Scholar]
- Xu, C.; Song, J.; Chen, M.; Chen, J.; Yu, L. Research on Adaptive State Update Strategy of Distributed Interactive Simulation. In Proceedings of the 3rd IEEE International Conference on Multimedia Information Networking and Security (MINES), Shanghai, China, 4–6 November 2011; ISBN 978-1-4577-1795-6. [Google Scholar]
- Cai, H.; Lin, Y.; Cheng, B. Mimicking human driving behaviour for realistic simulation of traffic flow. Int. J. Simul. Process Model. 2010, 6, 126–136. [Google Scholar] [CrossRef]
- Bando, T.; Shibata, T. Networked Driving Simulator Based on SIGVerse and Lane-Change Analysis According to Frequency of Driving. In Proceedings of the 15th International IEEE Conference on Intelligent Transportation Systems (ITSC), Anchorage, AK, USA, 16–19 September 2012; ISBN 978-1-4673-3064-0. [Google Scholar]
- Tan, J.; Inamura, T. What Are Required to Simulate Interaction with Robot? SIGVerse—A Simulation Platform for Human-Robot Interaction. In Proceedings of the International IEEE Conference on Robotics and Biomimetics (ROBIO), Phuket, Thailand, 7–11 December 2011; ISBN 978-1-4577-2136-6. [Google Scholar]
- Heesen, M.; Baumann, M.; Kelsch, J.; Nause, D.; Friedrich, M. Investigation of Cooperative Driving Behaviour during Lane Change in a Multi-Driver Simulation Environment. In Proceedings of the Human Factors and Ergonomics Society (HFES) Europe Chapter Conference, Toulouse, France, 10–12 October 2012; ISBN 978-0-945289-44-9. [Google Scholar]
- Yasar, H.; Berbers, Y.; Preuveneers, D. A Computational Analysis of Driving Variations on Distributed Multiuser Driving Simulators. In Proceedings of the IASTED International Conference on Modelling and Simulation, Quebec, QC, Canada, 26–28 May 2008; pp. 178–186, ISBN 978-0-88986-764-2. [Google Scholar]
- Hancock, P.; Ridder, S. Behavioural accident avoidance science: Understanding response in collision incipient conditions. Ergon. J. 2003, 46, 1111–1135. [Google Scholar] [CrossRef] [PubMed]
- Houtenbos, M. Expecting the Unexpected: A Study of Interactive Driving Behaviour at Intersections. Ph.D. Thesis, TU Delft, TRAIL Research School, Delft, The Netherlands, 2008. [Google Scholar]
- Rittger, L.; Mühlbacher, D.; Maag, C.; Kiesel, A. Anger and Bother Experience When Driving with a Traffic Light Assistant: A Multi-Driver Simulator Study. In Proceedings of the Annual Conference of Human Factors and Ergonomics Society Europe Chapter, Lisbon, Portugal, 8 October 2014; pp. 41–45. [Google Scholar]
- Sawyer, B.; Hancock, P. Development of a Linked Simulation Network to Evaluate Intelligent Transportation System Vehicle to Vehicle Solutions. In Proceedings of the 56th Annual Meeting of Human Factors and Ergonomics Society, Boston, MA, USA, 22–26 October 2012; ISBN 978-0-945289-41-8. [Google Scholar]
- Ma, T.; Li, T. A multi-driver simulator study Development and application of an integrated traffic simulation and multi-driving simulators. J. Simul. Model. Pract. Theory 2015, 59, 1–17. [Google Scholar]
- Niu, D.; Sun, J. Eco-Driving Versus Green Wave Speed Guidance for Signalized Highway Traffic: A Multi-Vehicle Driving Simulator Study. J. Soc. Behav. Sci. 2013, 96, 1079–1090. [Google Scholar] [CrossRef]
- Li, L.; Cao, J.; Liao, X.; Zhao, A. Research and Implementation of Virtools Based on 3D Virtual Teaching Laboratory. In Proceedings of the 3rd International Conference on Computer Science and Network Technology (ICCSNT), Dalian, China, 12–13 October 2013; ISBN 978-1-4799-0560-7. [Google Scholar]
- Gajananan, K.; Nantes, A.; Miska, M.; Nakasone, A.; Prendinger, H. An Experimental Space for Conducting Controlled Driving Behavior Studies based on a Multiuser Networked 3D Virtual Environment and the Scenario Markup Language. IEEE Trans. Hum.-Mach. Syst. 2013, 29, 345–358. [Google Scholar] [CrossRef]
- Oeltze, K.; Schießl, C. Benefits and challenges of multi-driver simulator studies. IEEE J. IET Intell. Transp. Syst. 2015, 9, 618–625. [Google Scholar] [CrossRef]
- Lorenz, T.; Baumann, M.; Jaschke, K.; Koster, F. A Modular and Scalable Application Platform for Testing and Evaluating Its Components. In Proceedings of the 20th IEEE International Workshops on Enabling Technologies: Infrastructure for Collaborative Enterprises (WETICE), Paris, France, 27–29 June 2011; ISBN 978-1-4577-0134-4. [Google Scholar]
- Laschinsky, J.; von Neumann-Cosel, K.; Gonter, M.; Wegwerth, C.; Dubitzky, R.; Knoll, A. Evaluation of an Active Safety Light using Virtual Test Drive within Vehicle in the Loop. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Vi a del Mar, Chile, 14–17 March 2010; ISBN 978-1-4244-5695-6. [Google Scholar]
- Prendinger, H.; Gajananan, K.; Zaki, A.; Fares, A.; Molenaar, R.; Zaki, A.; Urbano, D.; Lint, H.; Gomaa, W. Tokyo Virtual Living Lab: Designing Smart Cities Based on the 3D Internet. IEEE Int. Comput. Mag. 2013, 17, 30–38. [Google Scholar] [CrossRef]
- Stoianovici, V.; Talaba, D.; Nedelcu, A.; Pisu, M.; Barbuceanu, F.; Stavar, A. A Virtual Reality Based Human-Network Interaction System for 3D Internet Applications. In Proceedings of the 12th IEEE International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Brasov, Romania, 20–22 May 2010; ISBN 978-1-4244-7019-8. [Google Scholar]
- Bonotti, A.; Genovali, L.; Ricci, L. DiVES: A Distributed Support for Networked Virtual Environments. In Proceedings of the 20th International Conference on Advanced Information Networking and Applications (AINA 2013), Gothenburg, Sweden, 18–20 April 2006; ISBN 0-7695-2466-4. [Google Scholar]
- Nuckelt, J.; Rose, D.; Jansen, T.; Kürner, T. On the Use of OpenStreetMap Data for V2X Channel Modeling in Urban Scenarios. In Proceedings of the 7th European Conference on Antennas and Propagation (EuCAP), Gothenburg, Sweden, 8–12 April 2013; ISBN 978-1-4673-2187-7. [Google Scholar]
- Hu, X.; Liu, X.; He, Z.; Zhang, J. On the use of OpenStreetMap data for V2X channel modeling in urban scenarios. In Proceedings of the IET International Conference on Smart and Sustainable City 2013 (ICSSC 2013), Gothenburg, Sweden, 19–20 August 2013; ISBN 978-1-84919-707-6. [Google Scholar]
- Prendinger, H.; Oliveira, J.; Catarino, J.; Madruga, M.; Prada, R. iCO2—A Networked Game for Collecting Large-Scale Eco-Driving Behavior Data. IEEE Internet Comput. Mag. 2014, 18, 28–35. [Google Scholar] [CrossRef]
- Swake, J.; Jannat, M.; Islam, M.; Hurwitz, D. Driver Response to Phase Termination at Signalized Intersections: Are Driving Simulator Results Valid? In Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design, New York, NY, USA, 17–20 June 2013; ISBN 9780615819723. [Google Scholar]
- Warnera, J.; Hurwitza, D.S.; Monsereb, C.M.; Fleskesa, K. A simulator-based analysis of engineering treatments for right-hook bicycle crashes at signalized intersections. J. Accid. Anal. Prev. 2017, 104, 46–57. [Google Scholar] [CrossRef] [PubMed]
- Jamshidi, M. System of Systems Engineering: Innovations for the Twenty-First Century, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2008; pp. 1–20. ISBN 9780470195901. [Google Scholar]
Figure 1.
Schematic of a platform of networked driving simulation for training purposes in driving schools.
Figure 1.
Schematic of a platform of networked driving simulation for training purposes in driving schools.
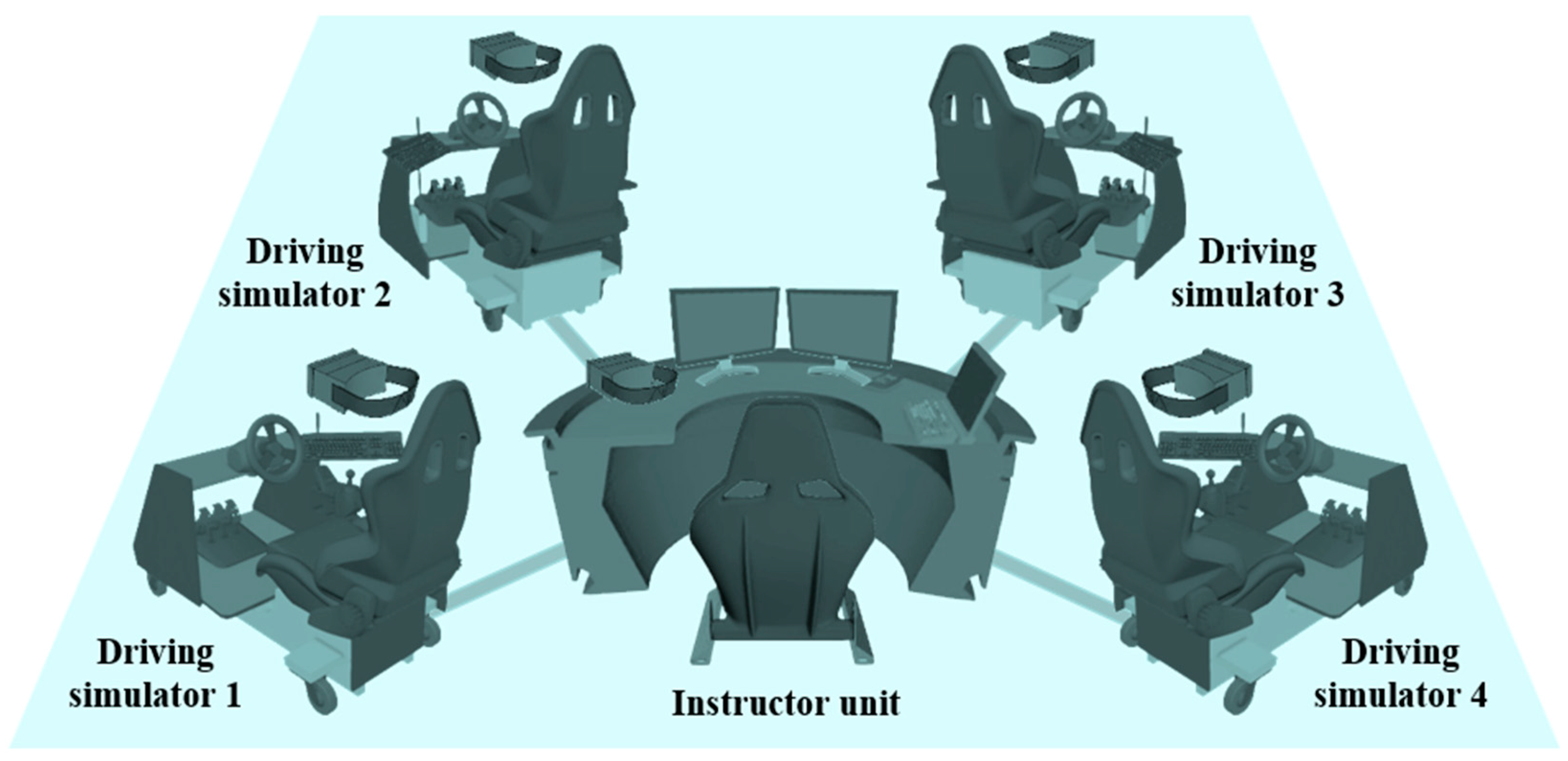
Figure 2.
A virtual environment for networked driving simulation for modern driving schools.
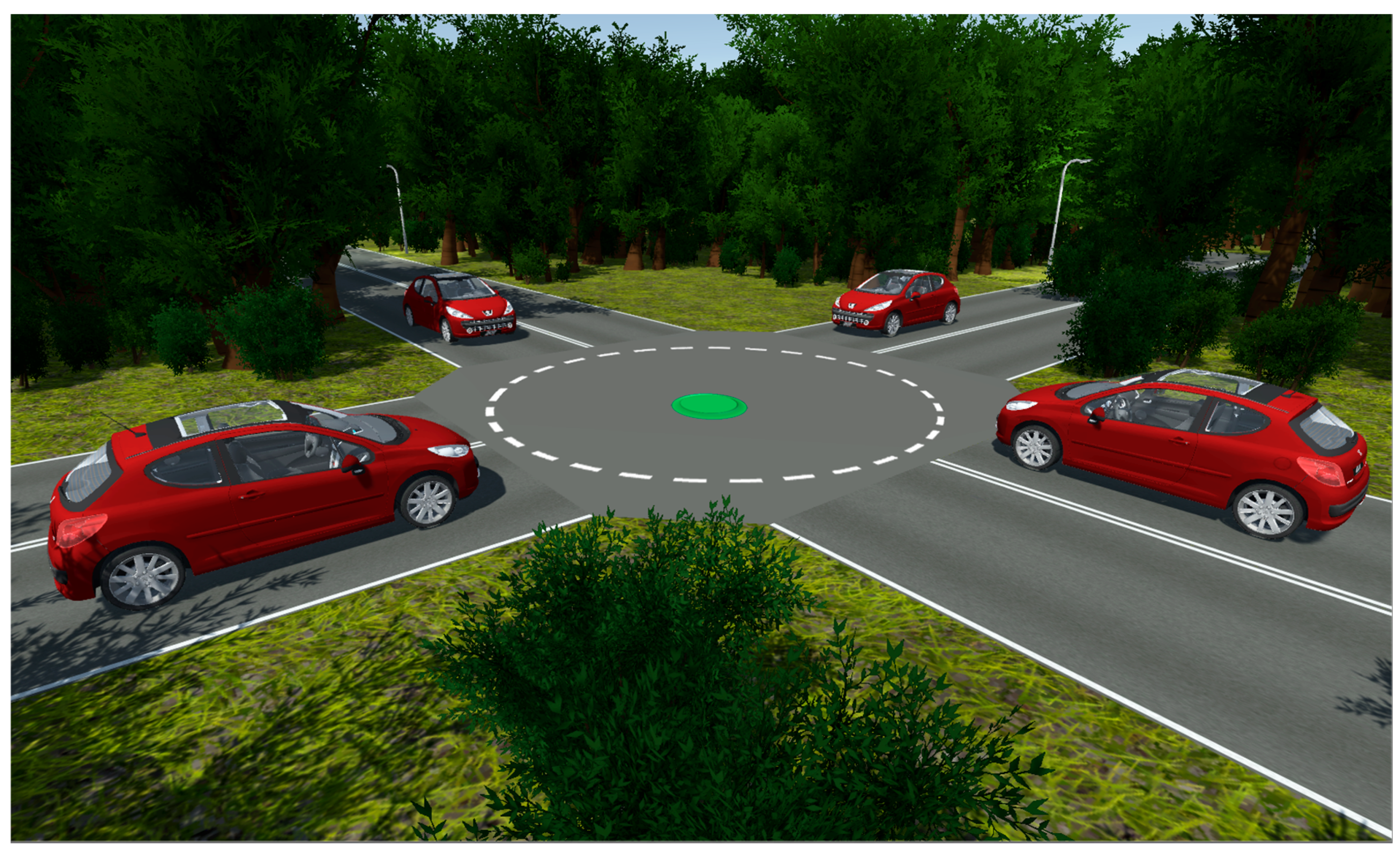
Figure 3.
Schematic of a platform of networked driving simulation for various interactive applications related to truck-platooning.
Figure 3.
Schematic of a platform of networked driving simulation for various interactive applications related to truck-platooning.
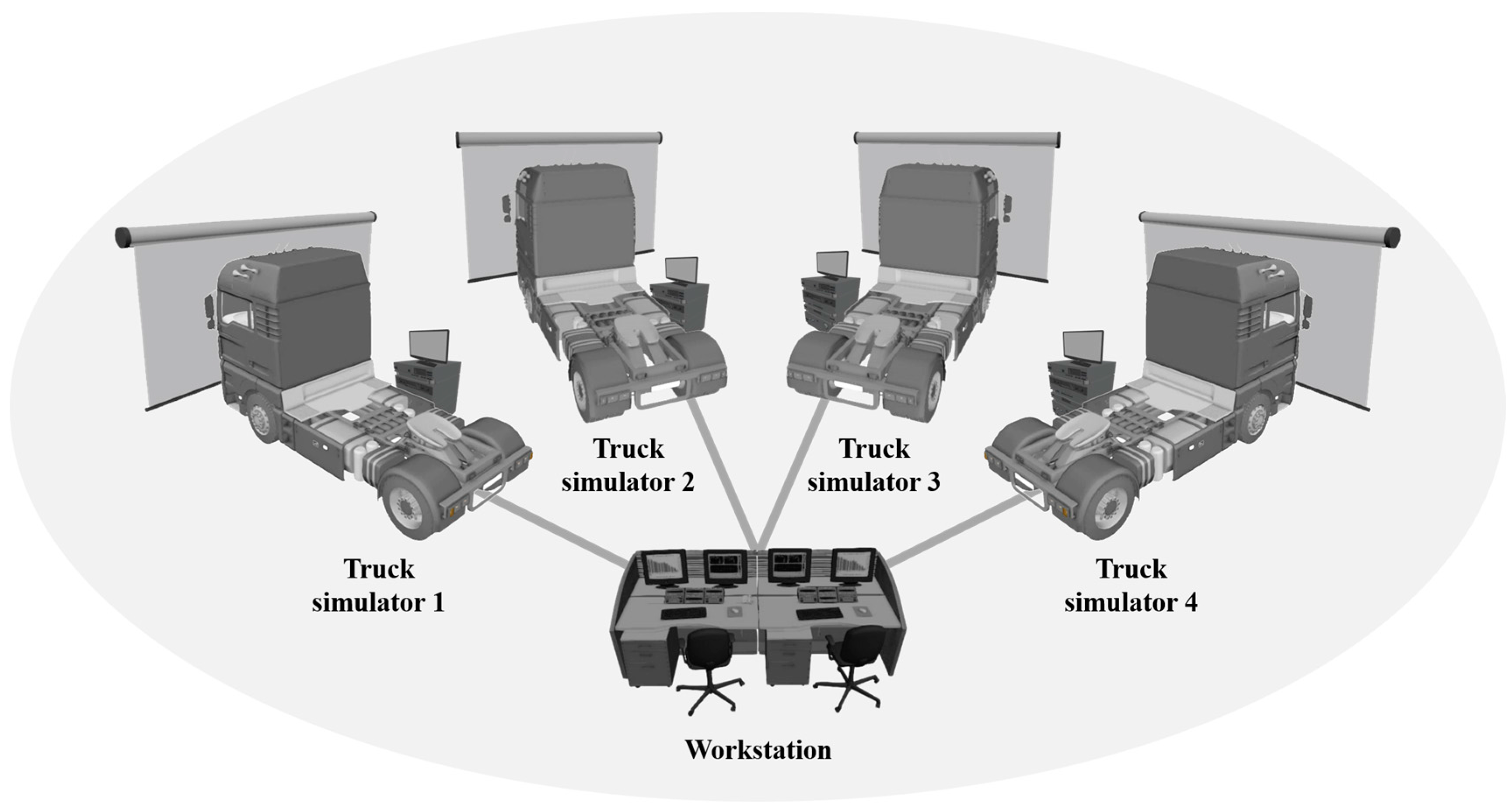
Figure 4.
A virtual environment for networked driving simulation for various applications related to truck-platooning.
Figure 4.
A virtual environment for networked driving simulation for various applications related to truck-platooning.

Figure 5.
Schematic of a platform of networked driving simulation with mixed-fidelity levels for diverse automotive applications.
Figure 5.
Schematic of a platform of networked driving simulation with mixed-fidelity levels for diverse automotive applications.

Figure 6.
Multi-Driver Simulation Lab at the German Aerospace Center (DLR) [36].
Figure 6.
Multi-Driver Simulation Lab at the German Aerospace Center (DLR) [36].

Figure 7.
Tokyo Virtual Living Simulation Lab at NII: (a) Test persons using two networked driving simulators; (b) A screen shot of a shared 3D environment [41].
Figure 7.
Tokyo Virtual Living Simulation Lab at NII: (a) Test persons using two networked driving simulators; (b) A screen shot of a shared 3D environment [41].

Figure 8.
Driving simulator at the Oregon State University (OSU): (a) A test person in the driving platform; (b) Outside view of the driving simulator [43].
Figure 8.
Driving simulator at the Oregon State University (OSU): (a) A test person in the driving platform; (b) Outside view of the driving simulator [43].
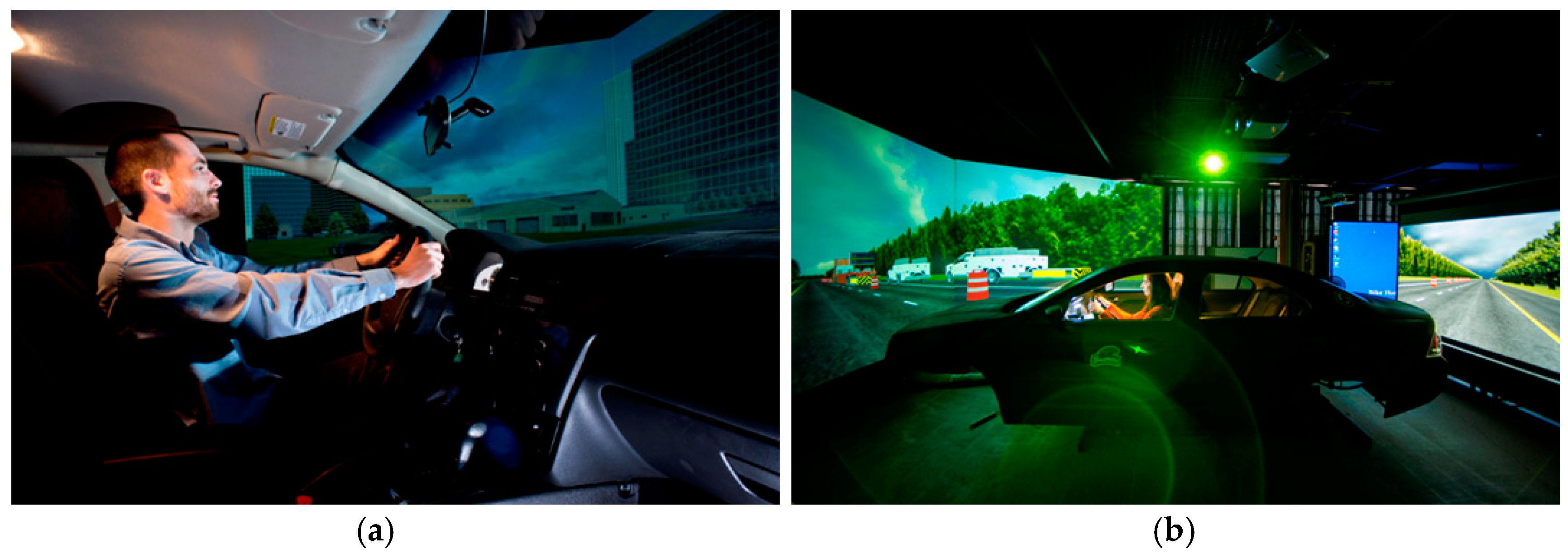
Figure 9.
Bicycling simulator at the Oregon State University (OSU): (a) A test person riding the bicycle simulator; (b) Different bicycle variants [43].
Figure 9.
Bicycling simulator at the Oregon State University (OSU): (a) A test person riding the bicycle simulator; (b) Different bicycle variants [43].

Figure 10.
Two different virtual scenarios combining a vehicle and a bicycle controlled by humans (OSU): (a) A vehicle behind a bicycle; (b) A bicycle behind a vehicle [43,44].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Evaluation of the examined facilities using the derived system requirements.
| Evaluation Scheme of the Examined Facilities | Requirements | |||
|---|---|---|---|---|
 = Not Fulfilled = Not Fulfilled | Systematic Approach | Open Interface Principle | Configurability Principle | Modularity Principle |
 = Partially Fulfilled = Partially Fulfilled | ||||
 = Totally Fulfilled = Totally Fulfilled | ||||
| Examined Facilities | R1 | R2 | R3 | R4 |
| Multi-Driver Simulation Lab at DLR | | | | |
| Tokyo Virtual Living simulation Lab at NII | | | | |
| Driving and Bicycling Simulation Lab at OSU | | | | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Abdelgawad, K.; Gausemeier, J.; Dumitrescu, R.; Grafe, M.; Stöcklein, J.; Berssenbrügge, J. Networked Driving Simulation: Applications, State of the Art, and Design Considerations. Designs 2017, 1, 4. https://doi.org/10.3390/designs1010004
AMA Style
Abdelgawad K, Gausemeier J, Dumitrescu R, Grafe M, Stöcklein J, Berssenbrügge J. Networked Driving Simulation: Applications, State of the Art, and Design Considerations. Designs. 2017; 1(1):4. https://doi.org/10.3390/designs1010004
Chicago/Turabian StyleAbdelgawad, Kareem, Jürgen Gausemeier, Roman Dumitrescu, Michael Grafe, Jörg Stöcklein, and Jan Berssenbrügge. 2017. "Networked Driving Simulation: Applications, State of the Art, and Design Considerations" Designs 1, no. 1: 4. https://doi.org/10.3390/designs1010004