Comparison between the Second and Third Generations of the CRONE Controller: Application to a Thermal Diffusive Interface Medium

Abstract
:1. Introduction
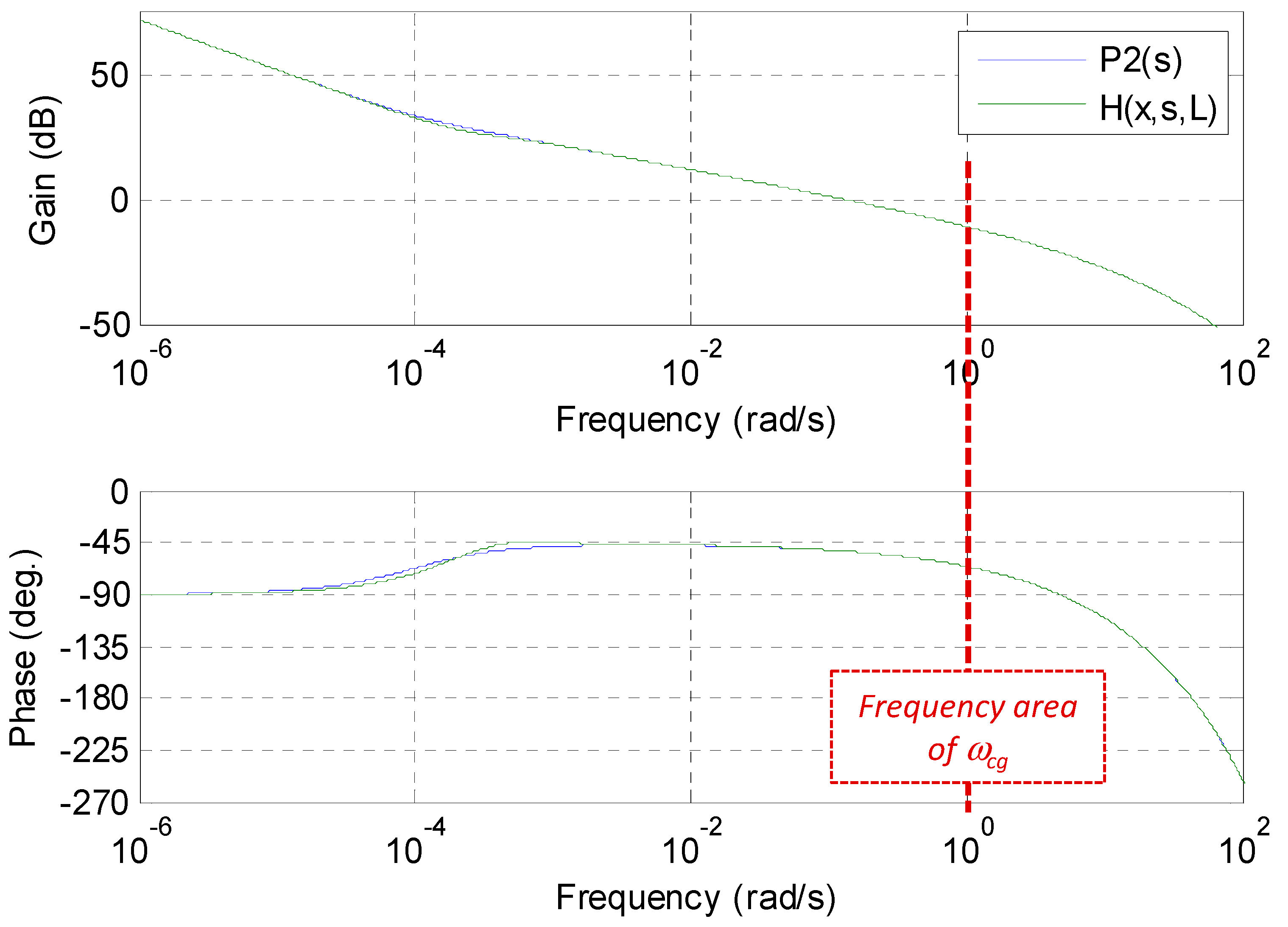
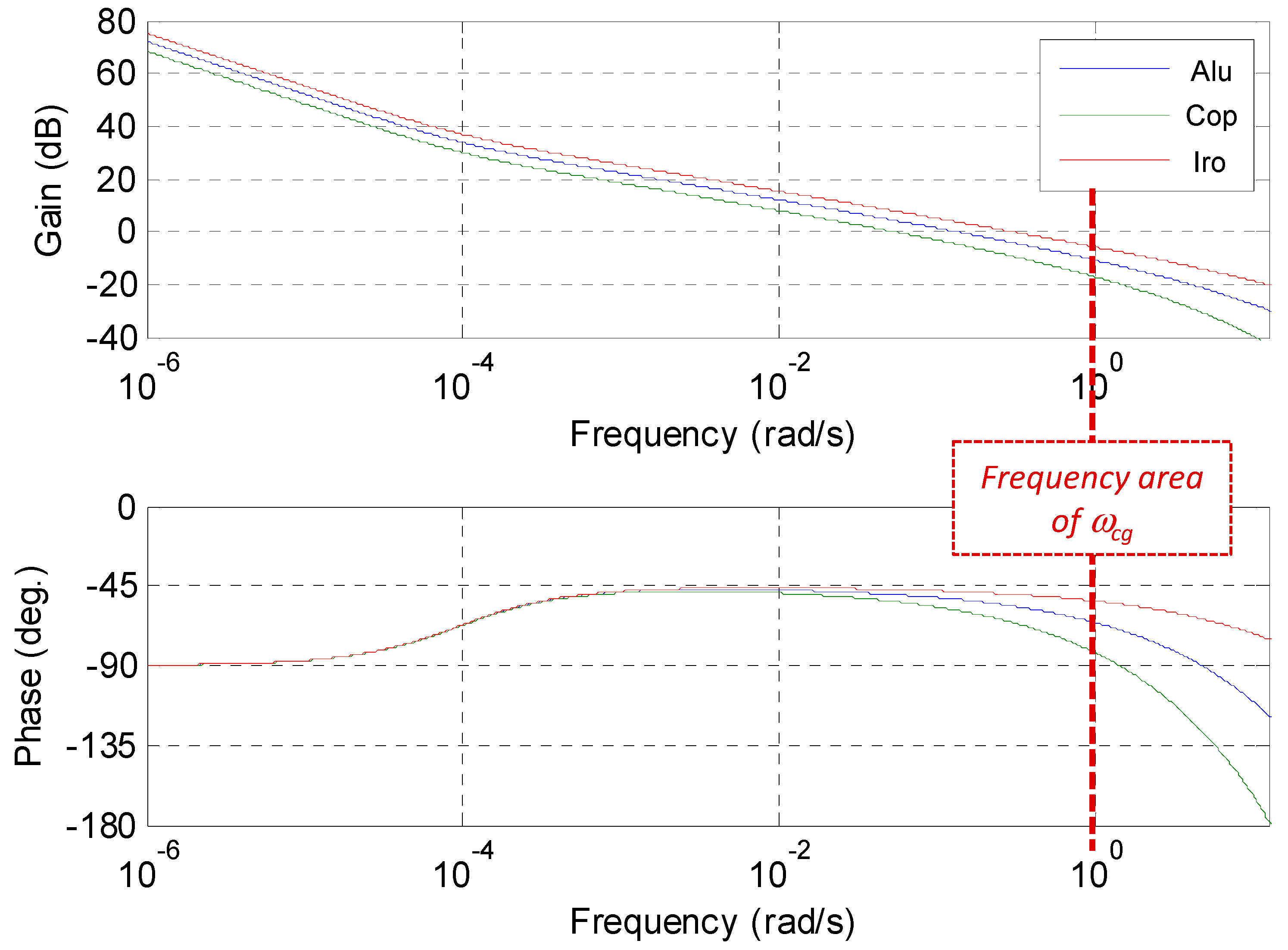
- A crossover frequency ωcg = 1 rad/s;
- A phase margin Mφ = 3 dB;
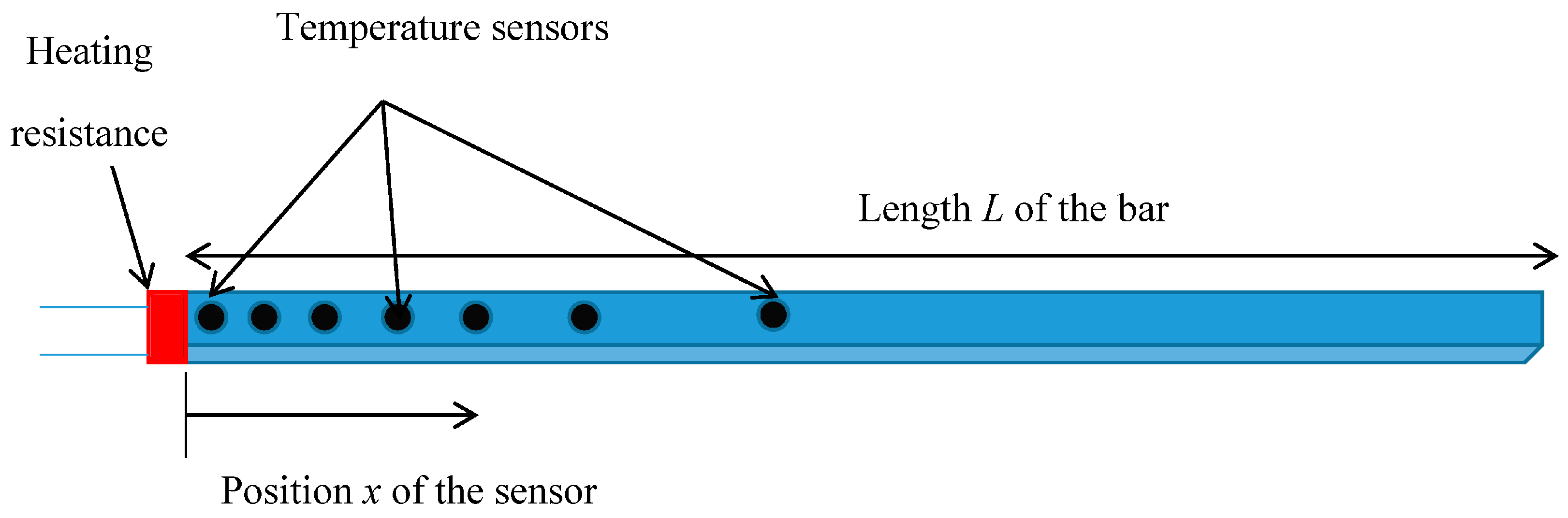
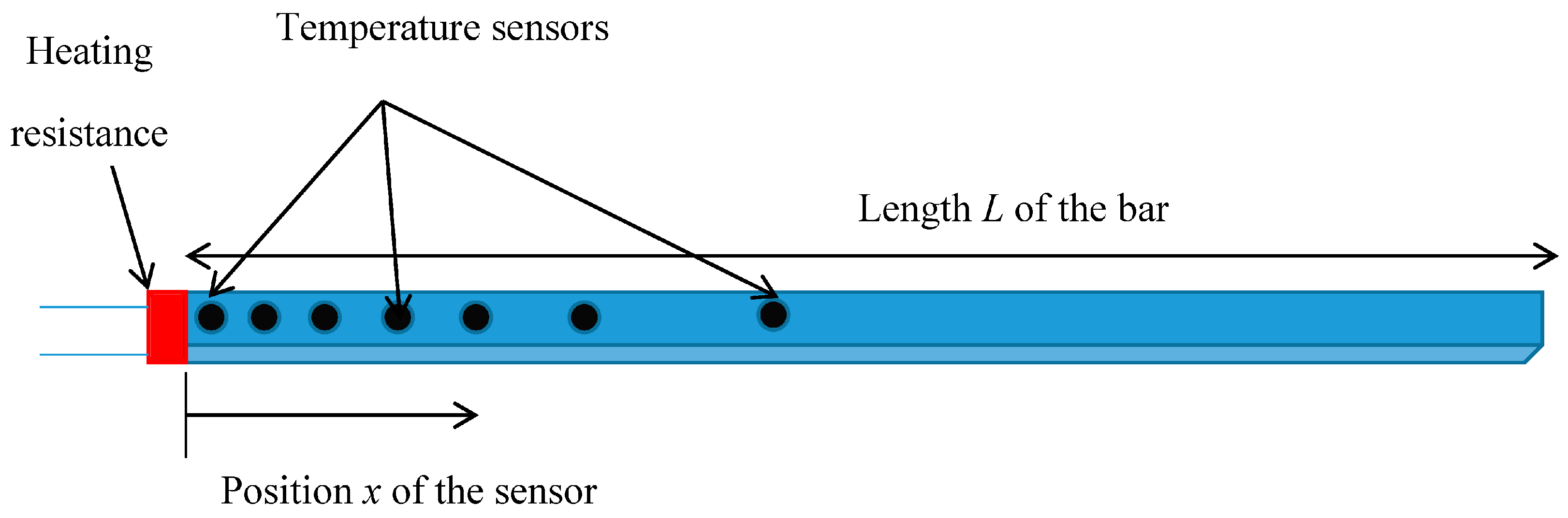
2. Plant Modeling
2.1. Partial Differential Equations (PDE)
2.2. Plant Transfer Function
2.3. Material Characteristics
3. CRONE Controllers Presentation
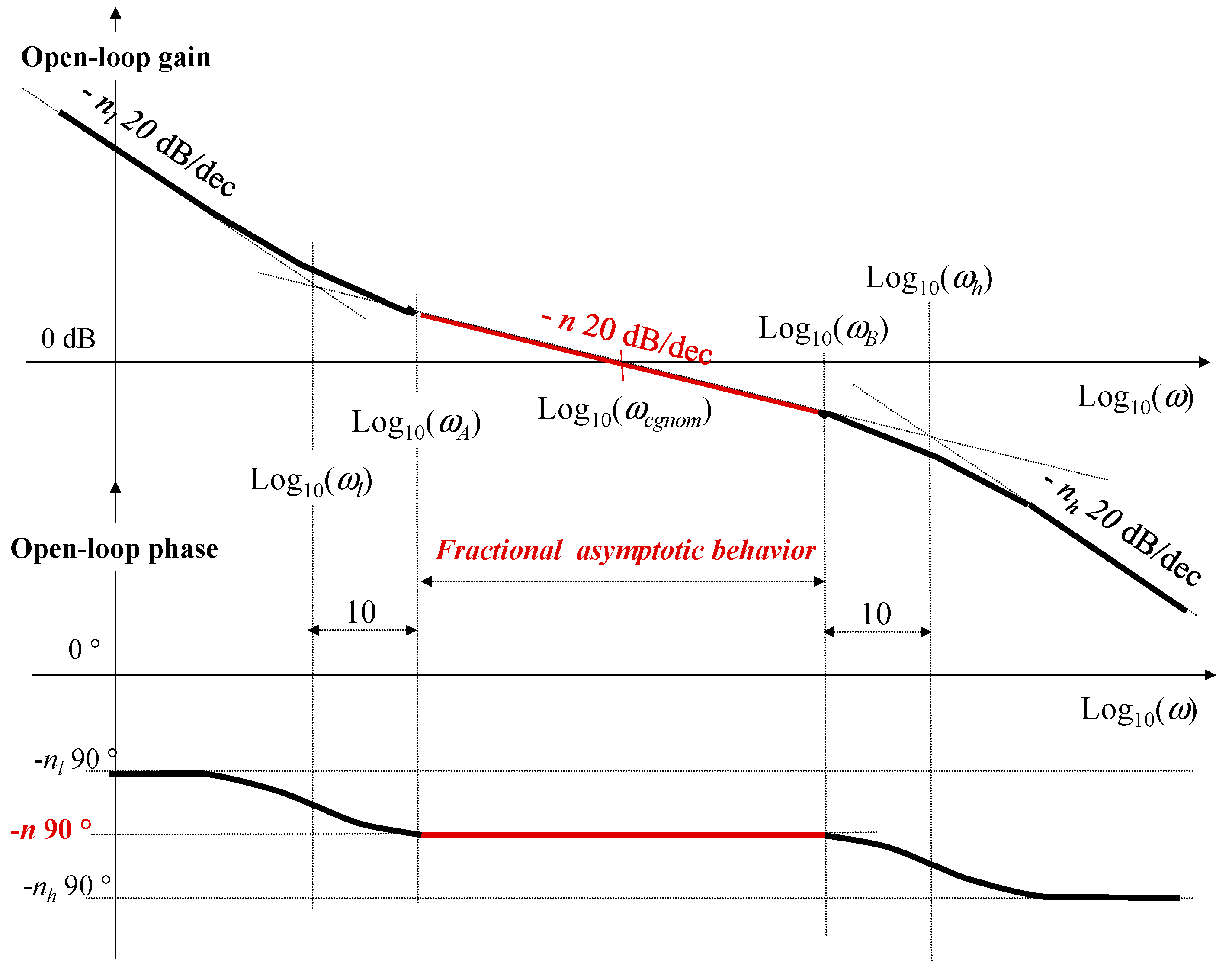
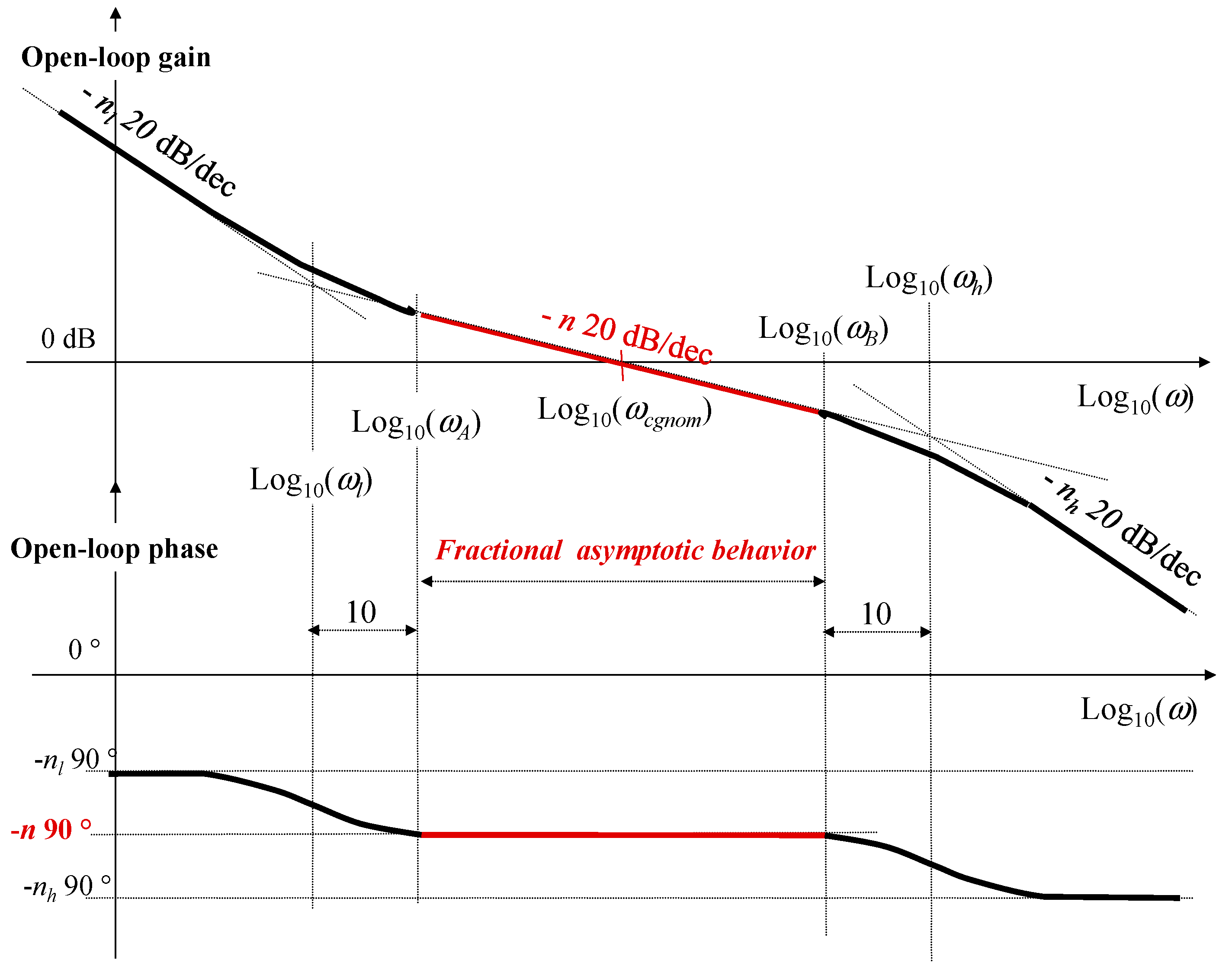
4. Second CRONE Generation
4.1. Introduction
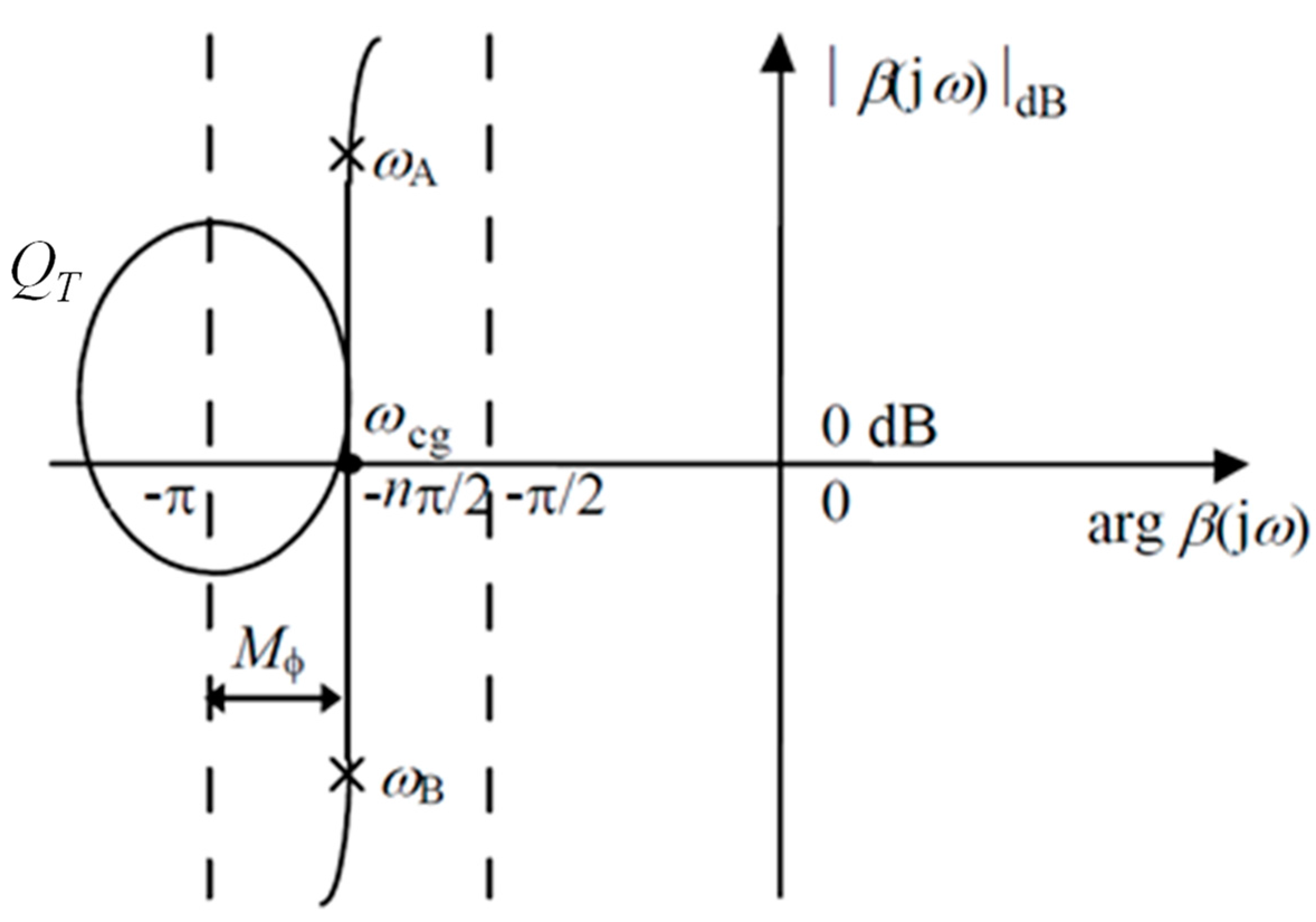
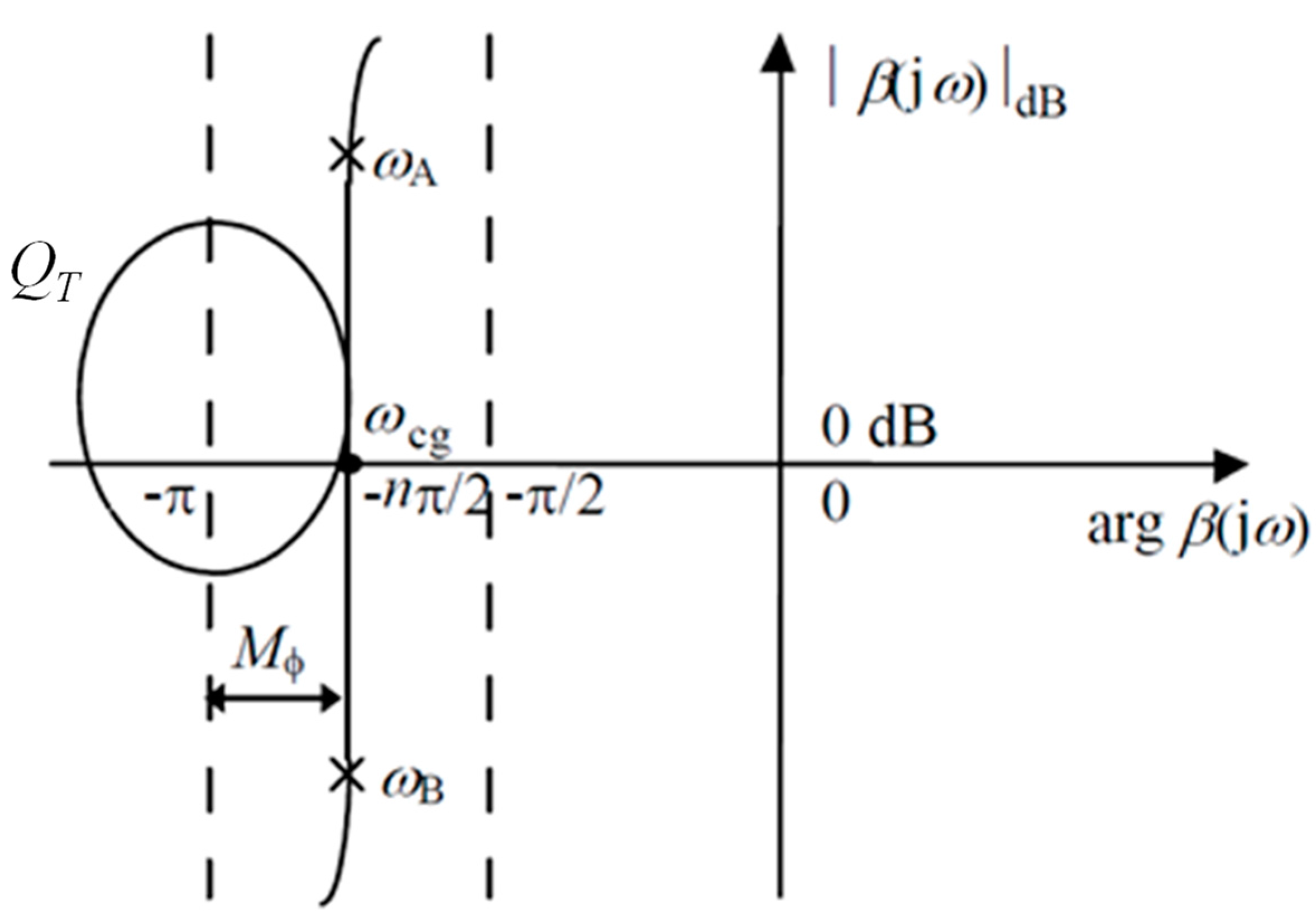
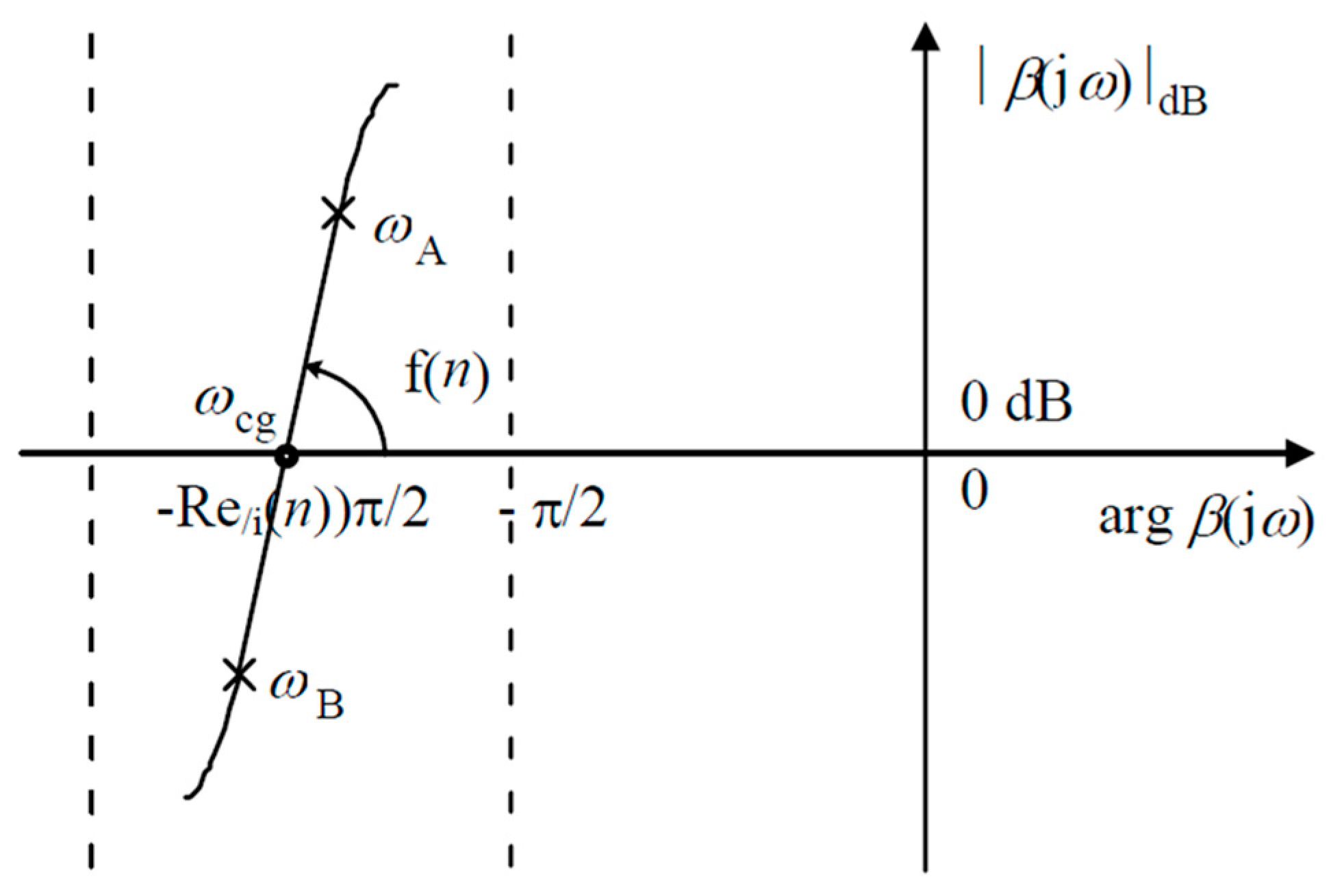
- a robust phase margin Mφ equal to (2−n)×π/2;
- a robust resonance factor QT, defined as follows:
- a robust gain module Mm, defined as follows:
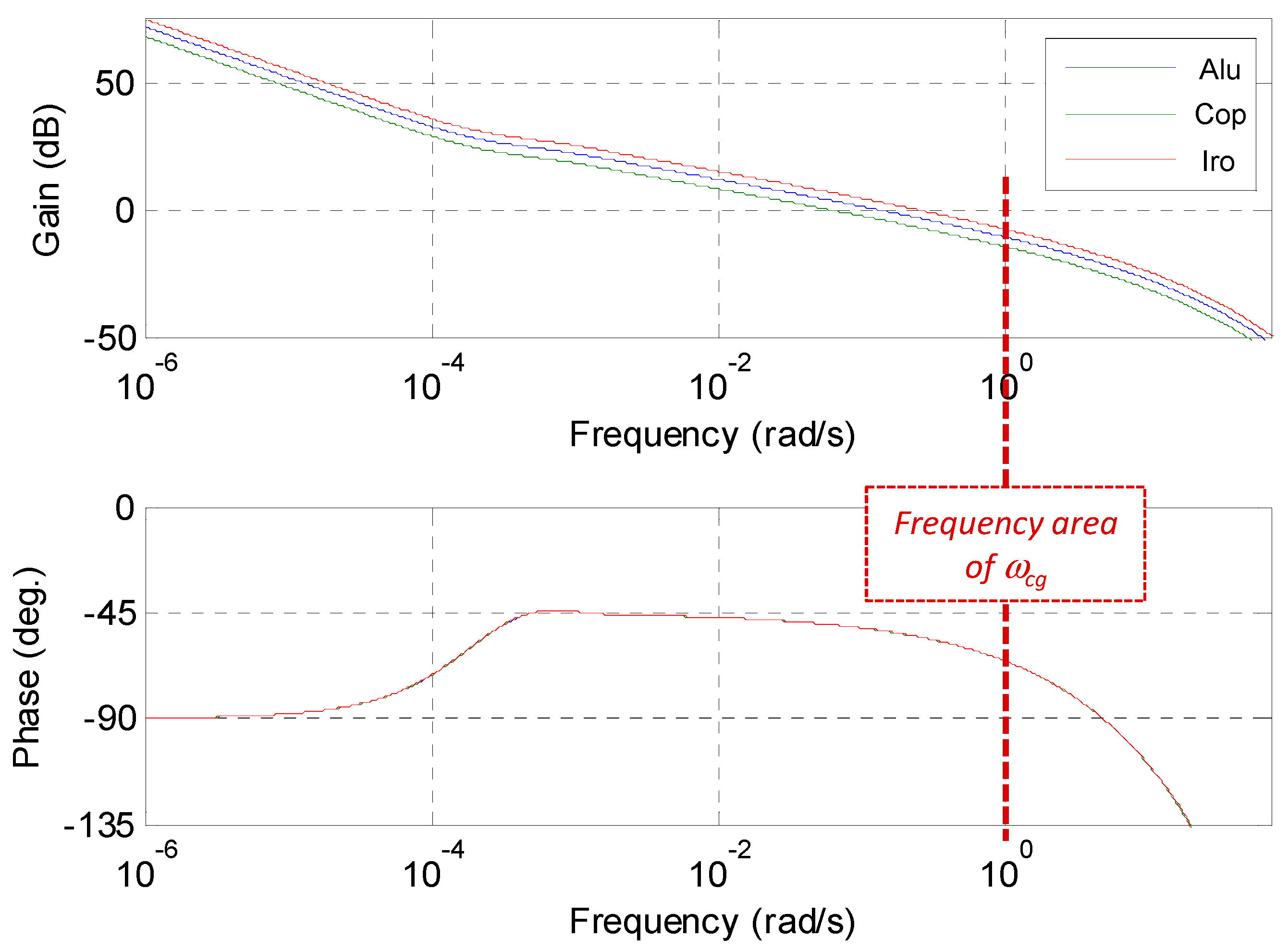
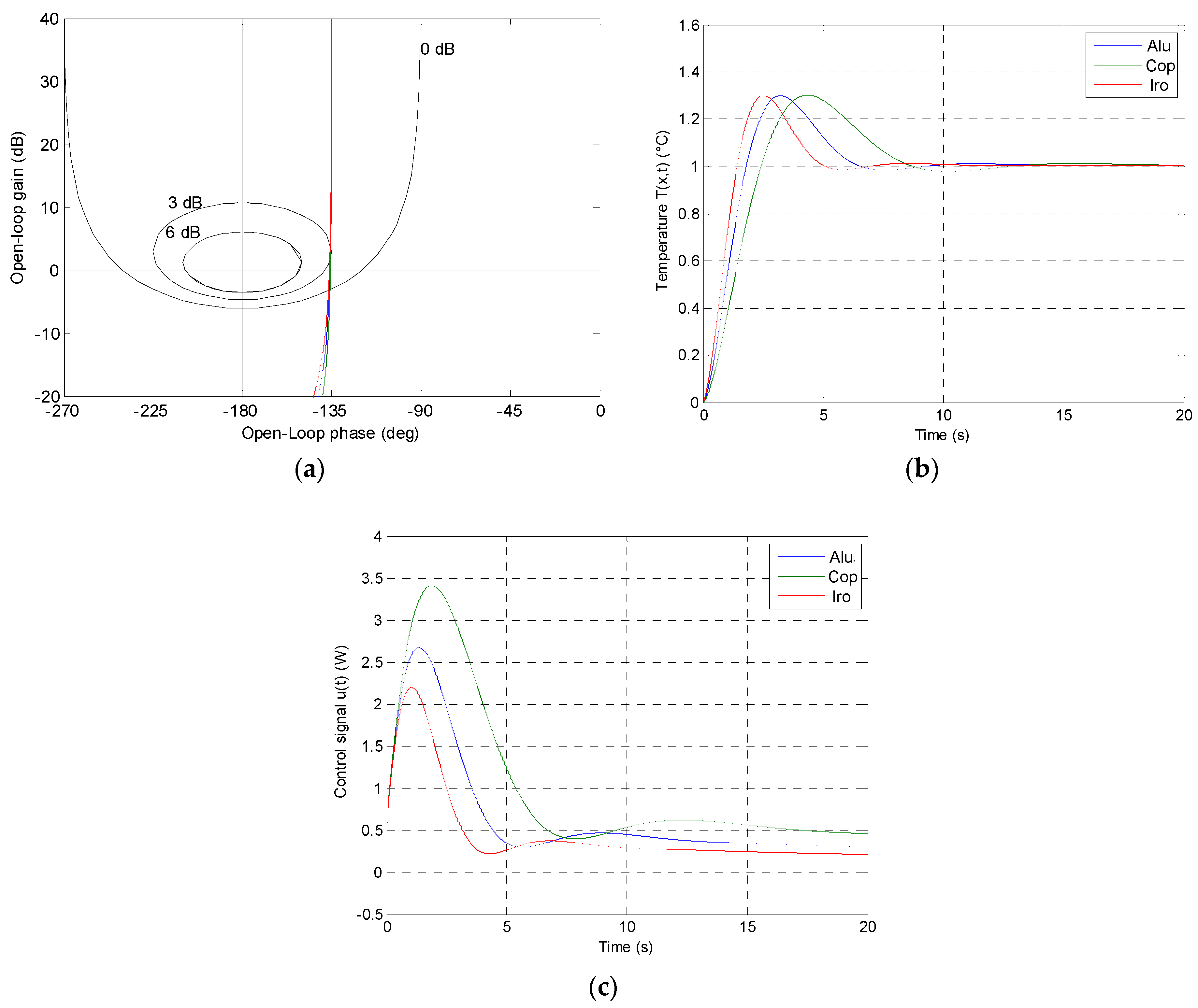
4.2. First Case Study
4.2.1. Plant Parameters
- -
- Aluminum, L = 1 m and x = 0.5 cm → ωL = 0.97 10−4 rad/s and ωx = 3.88 rad/s;
- -
- Copper, L = 1.1 m and x = 0.55 cm → ωL = 0.97 10−4 rad/s and ωx = 3.87 rad/s;
- -
- Iron, L = 0.49 m and x = 0.243 cm → ωL = 0.96 10−4 rad/s and ωx = 3.89 rad/s.
4.2.2. Synthesis Model
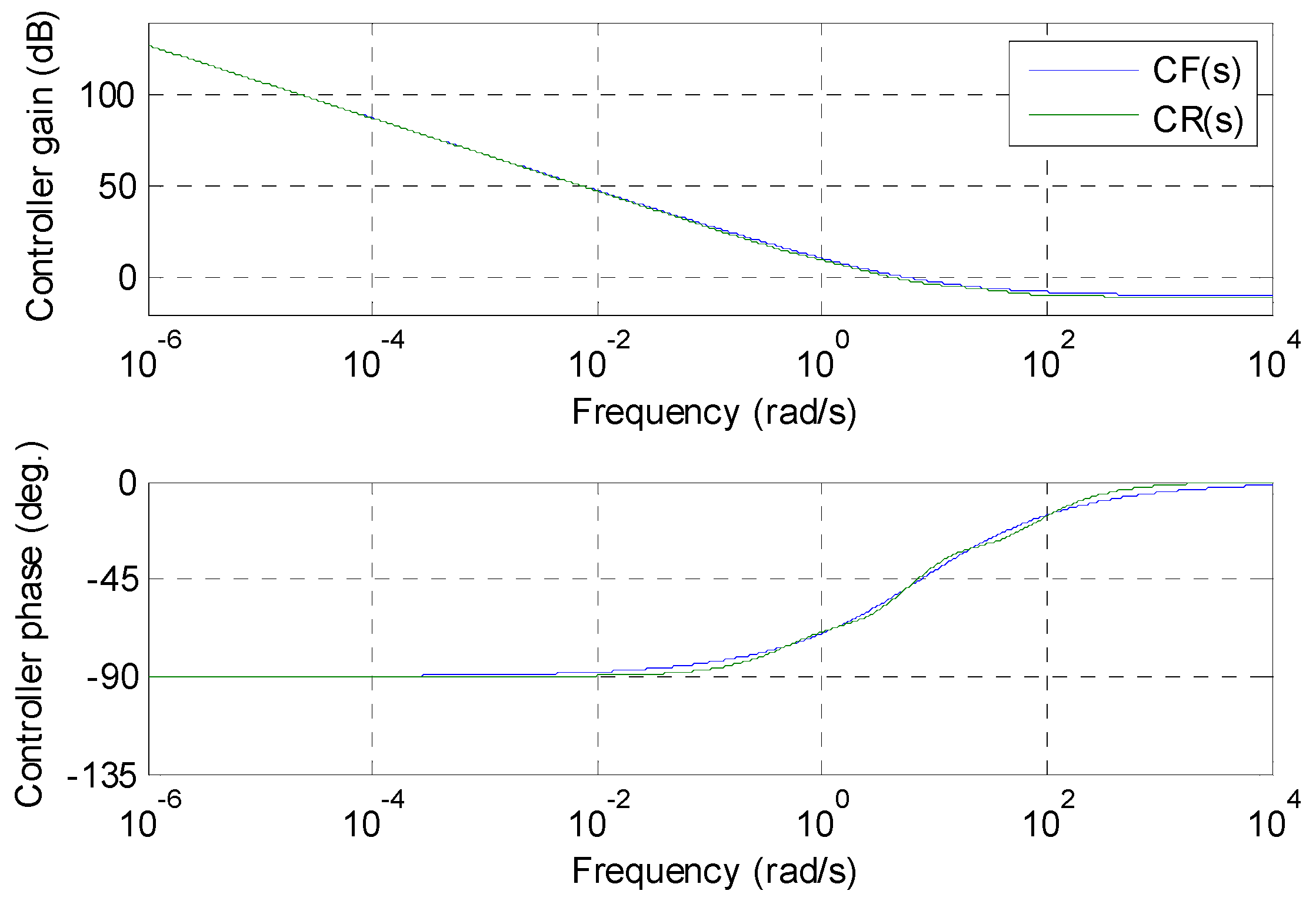
4.2.3. Controller Transfer Function
- -
- nl = 2, in order to assure a null training error;
- -
- nh = 1.5, in order to limit the input sensitivity;
- -
- QT = 3 dB or MΦ = 45° → n = (180°−MΦ)/90° = 1.5;
- -
- ωcgnom = 1 rad/s ;
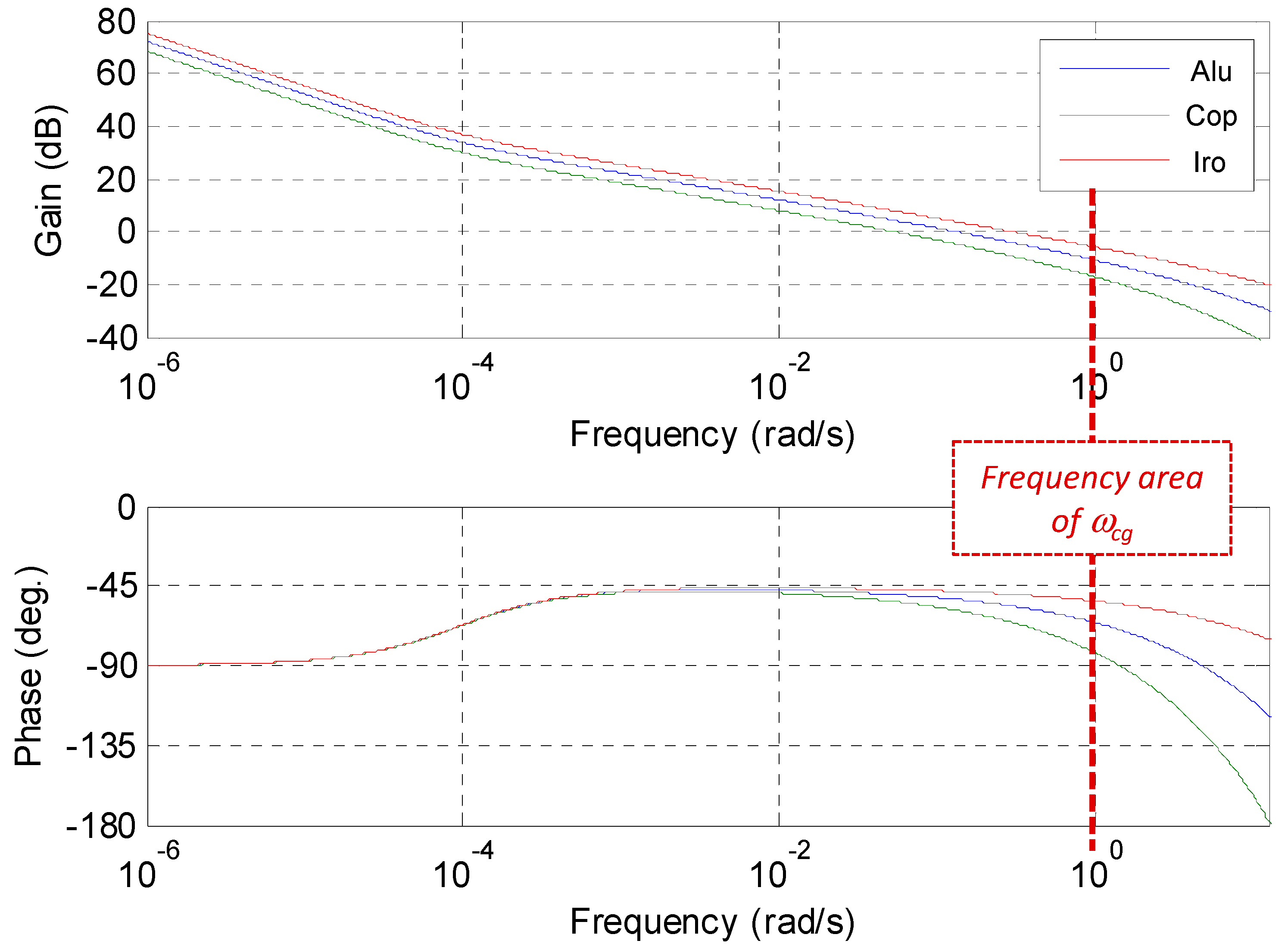
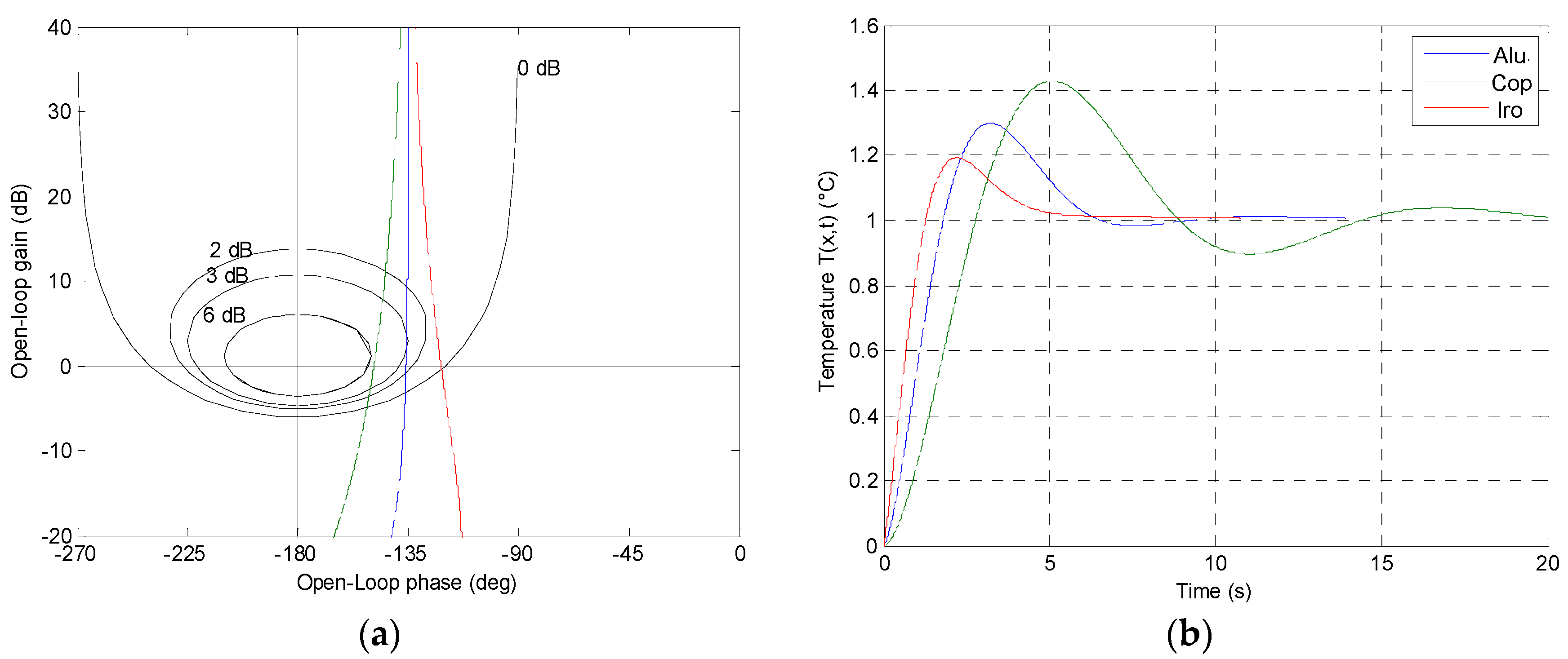
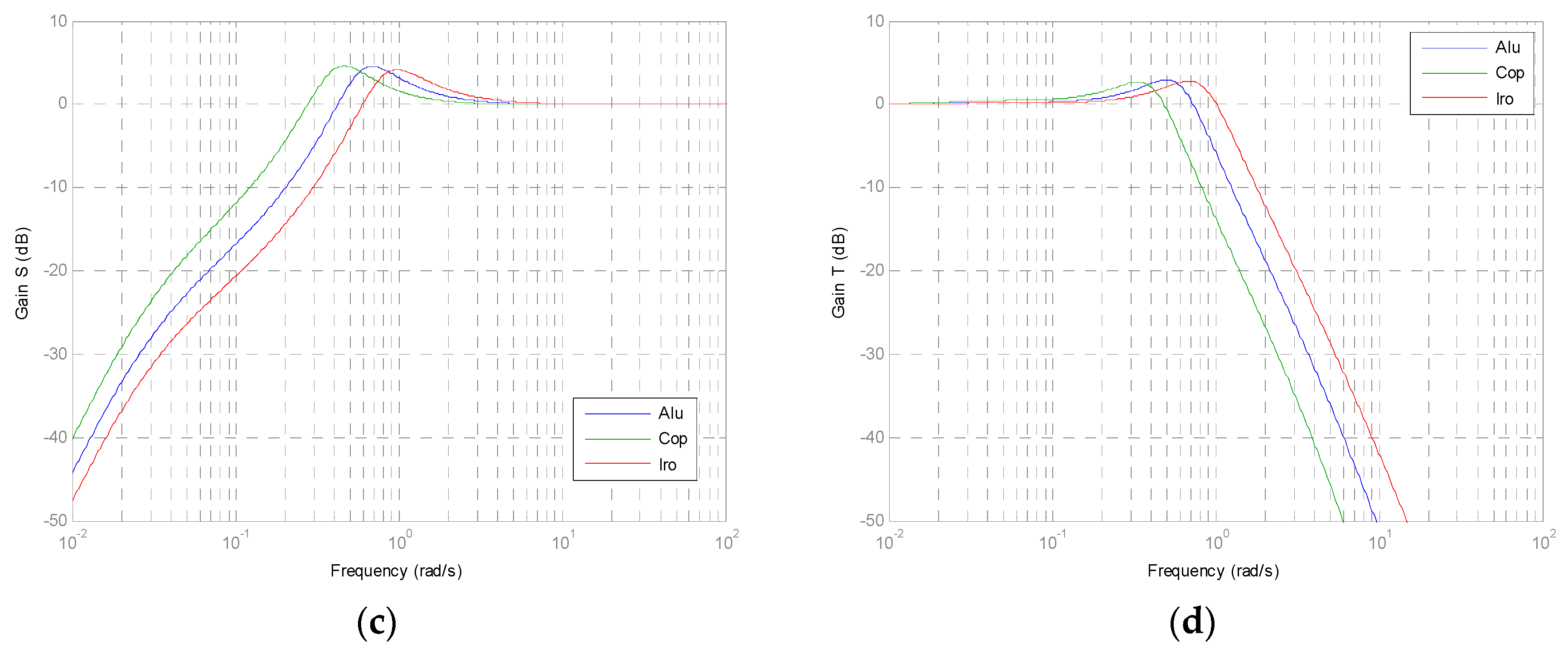
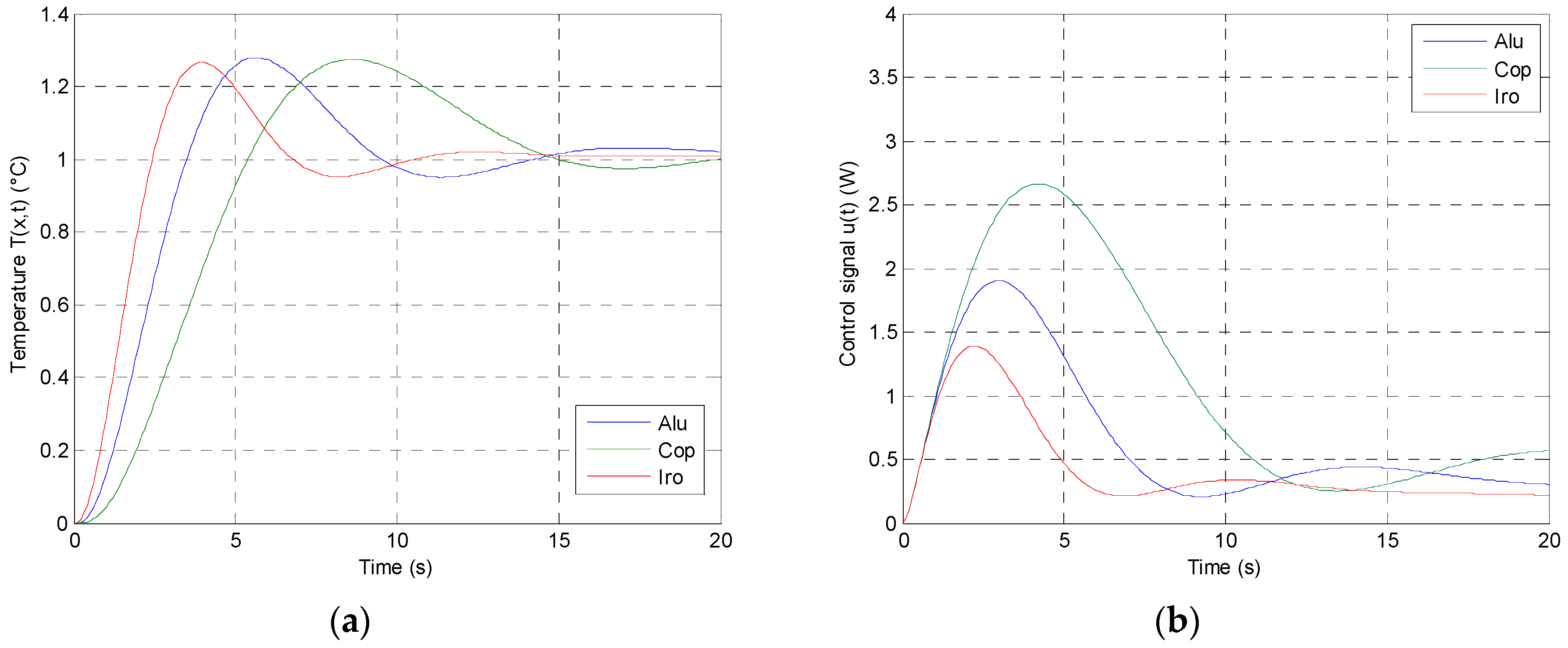
4.2.4. Performance Analysis
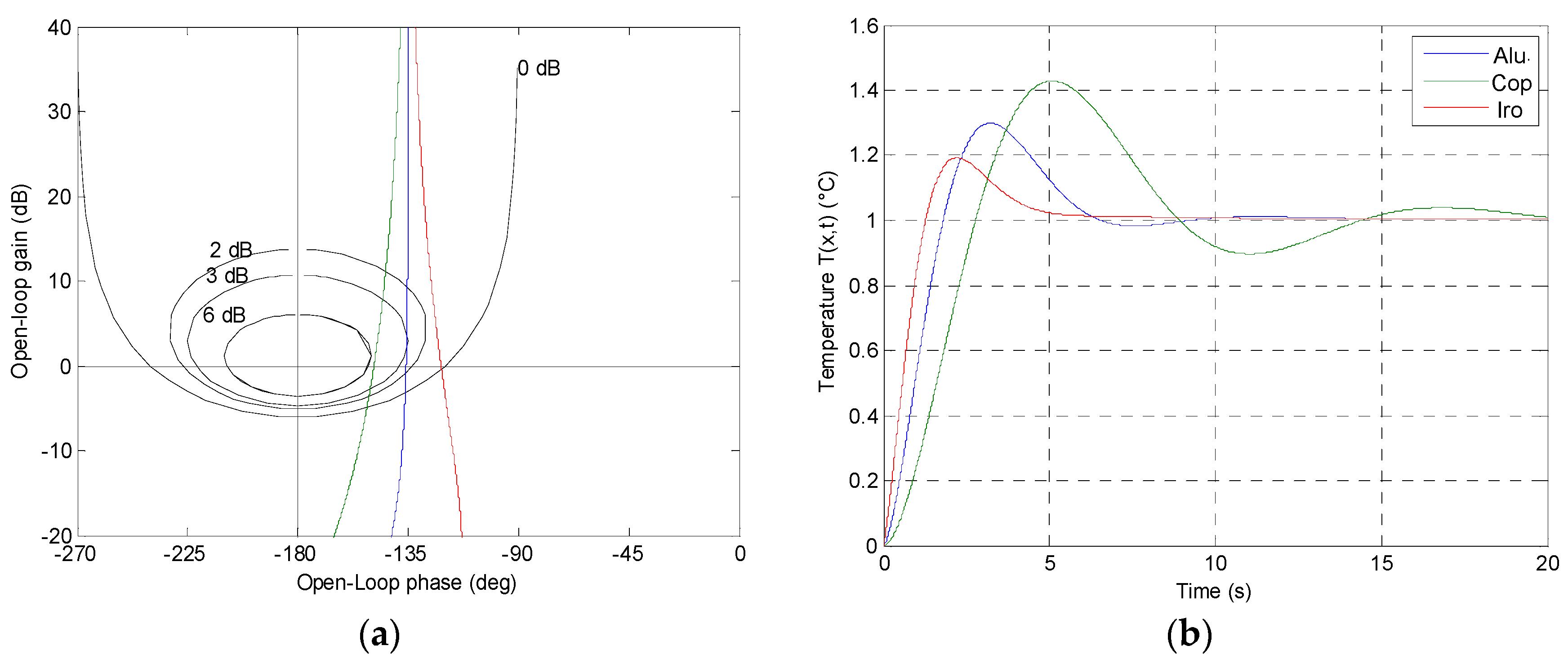
4.3. Second Case Study
4.3.1. Plant Parameters
- -
- Aluminum, L = 1 m and x = 0.5 cm → ωL = 0.97 10−4 rad/s and ωx = 3.88 rad/s;
- -
- Copper, L = 1.1 m and x = 1 cm → ωL = 0.97 10−4 rad/s and ωx = 1.17 rad/s;
- -
- Iron, L = 0.49 m and x = 0.1 cm → ωL = 0.96 10−4 rad/s and ωx = 23 rad/s.
4.3.2. Synthesis Model
4.3.3. Controller Transfer Function
4.3.4. Performance Analysis
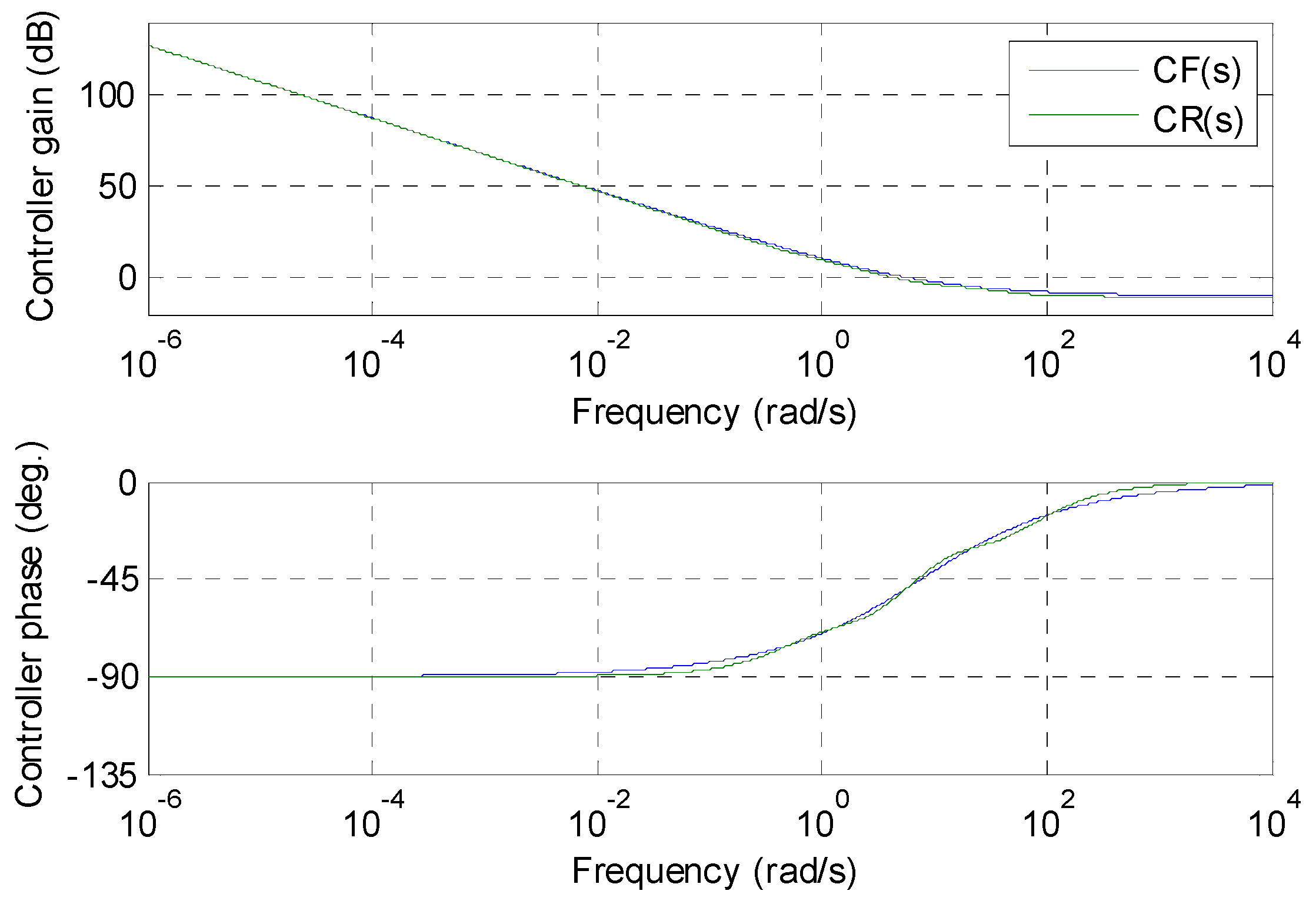
5. Third CRONE Generation
5.1. Introduction
5.2. CRONE Toolbox
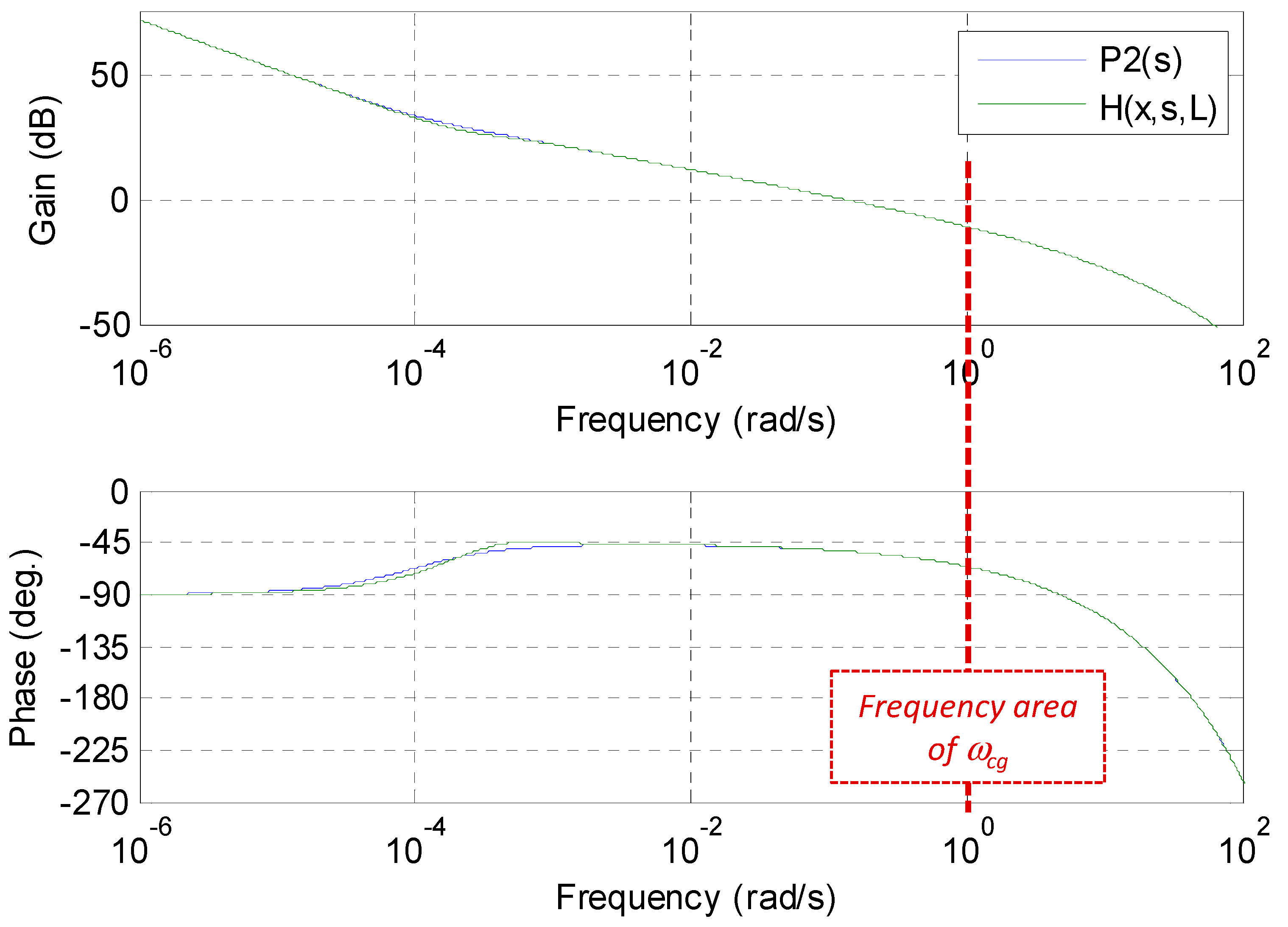
5.3. Case Study
5.3.1. Plant Parameters
5.3.2. Synthesis Model
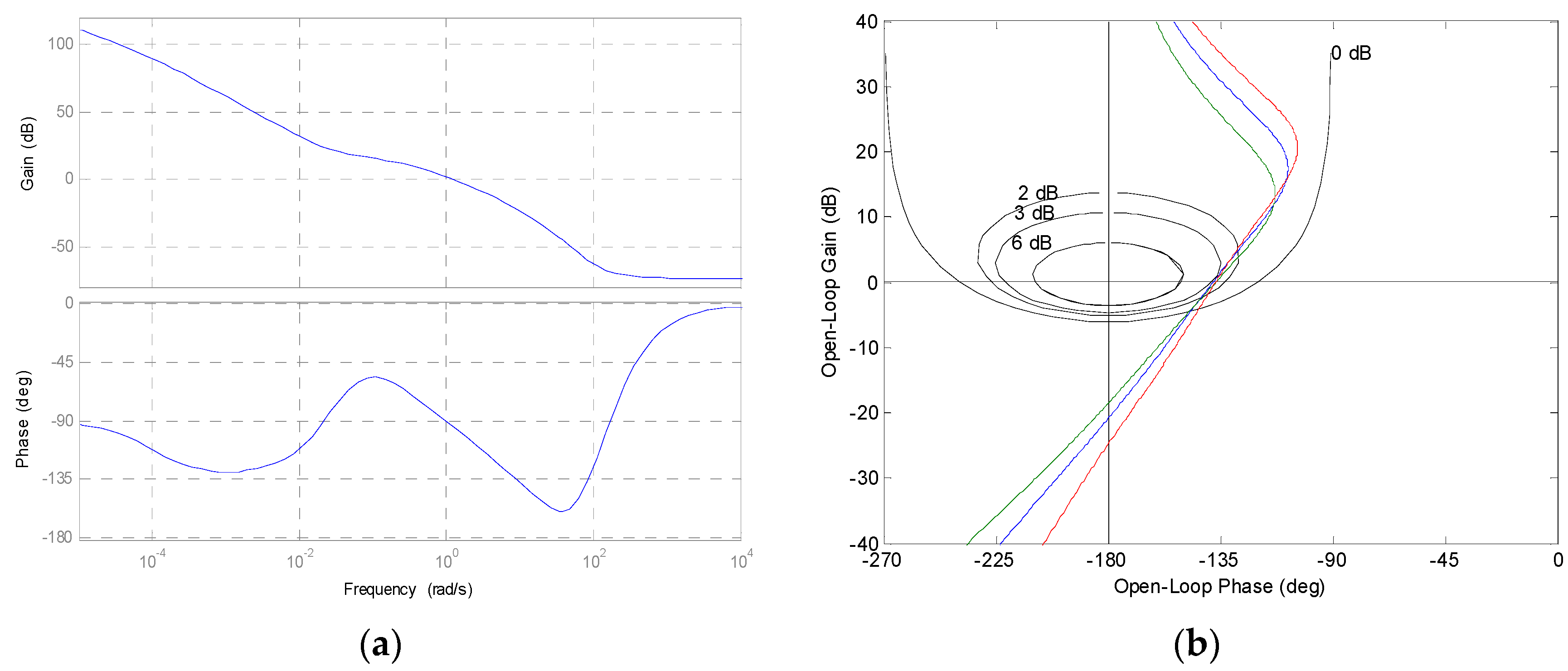
5.3.3. Performance Analysis
6. Conclusions and Future Works
- -
- Implement this system on a real test bench;
- -
- Study the accuracy of this system when varying the position of the temperature sensors; this deviation is due involuntarily when implementing the test bench;
- -
- Apply other regulators to control this fractional order plant as the sliding mode control (with its multiple types), Hinf robust control, and much more;
- -
- Introduce some estimators to evaluate the temperature value at some location where the temperature sensor can’t be placed.
Author Contributions
Conflicts of Interest
References
- Vašak, M.; Starčić, A.; Martinčević, A. Model predictive control of heating and cooling in a family house. In Proceedings of the 34th International Convention MIPRO, Opatija, Croatia, 23–27 May 2011. [Google Scholar]
- Van Leeuwen, R.; de Wit, J.; Fink, J.; Smit, G. House thermal model parameter estimation method for Model Predictive Control applications. In Proceedings of the IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015. [Google Scholar]
- Mihai, D. Fuzzy control for temperature of the driver seat in a car. In Proceedings of the 2012 International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 25–27 October 2012. [Google Scholar]
- He, B.; Liang, R.; Wu, J.; Wang, X. A Temperature Controlled System for Car Air Condition Based on Neuro-fuzzy. In Proceedings of the International Conference on Multimedia Information Networking and Security, Wuhan, China, 18–20 November 2009. [Google Scholar]
- Erikson, B. Insulation temperature standards for industrial-control coils. Electr. Eng. 1944, 63, 546–548. [Google Scholar] [CrossRef]
- Jones, B. Thermal Co-ordination of Motors, Control, and Their Branch Circuits on Power Supplies of 600 Volts and Less. Trans. Am. Inst. Electr. Eng. 1942, 61, 483–487. [Google Scholar] [CrossRef]
- Zucker, M. Thermal rating of overhead line wire. Electr. Eng. 1943, 62, 501–507. [Google Scholar] [CrossRef]
- Moore, R. The control of a thermal neutron reactor. Proc. IEE Part II Power Eng. 1953, 100, 197–198. [Google Scholar] [CrossRef]
- Bowen, J.H. Automatic control characteristics of thermal neutron reactors. J. Inst. Electr. Eng. 1953, 100, 122–123. [Google Scholar]
- Fink, L.H. Control of thermal environment of buried cable Systems. Electr. Eng. 1954, 73, 406–412. [Google Scholar] [CrossRef]
- Schmill, J.V. Mathematical Solution to the Problem of the Control or the Thermal Environment or Buried Cables. Trans. Am. Inst. Electr. Eng. Part III Power Appar. Syst. 1960, 79, 175–180. [Google Scholar] [CrossRef]
- Bhuvaneswari, T.; Yao, J.H. Automated greenhouse. In Proceedings of the IEEE International Symposium on Robotics and Manufacturing Automation, Kuala Lumpur, Malaysia, 15–16 December 2014. [Google Scholar]
- Rodríguez-Gracia, D.; Piedra-Fernández, J.; Iribarne, L. Adaptive Domotic System in Green Buildings. In Proceedings of the 4th International Congress on Advanced Applied Informatics, Okayama, Japan, 12–16 July 2015. [Google Scholar]
- Kumar, A. Numerical Modeling of the Thermal Boundary Layer near a Synthetic Crude Oil Plant. J. Air Pollut. Control Assoc. 1979, 29, 827–832. [Google Scholar] [CrossRef] [PubMed]
- Van Schravendijk, B.; de Koning, W.; Nuijen, W. Modeling and control of the wafer temperatures in a diffusion furnace. J. Appl. Phys. 1987, 61, 1620–1627. [Google Scholar] [CrossRef]
- De Waard, H.; de Koning, W. Modeling and control of diffusion and low-pressure chemical vapor deposition furnaces. J. Appl. Phys. 1990, 67, 2264–2271. [Google Scholar] [CrossRef]
- Özişik, M.-N. Heat Conduction; John Wiley & Sons: Ney York, NY, USA, 1980. [Google Scholar]
- Özişik, M.-N. Heat Transfer, a Basic Approach; McGraw-Hill: New York, NY, USA, 1985. [Google Scholar]
- Trigeassou, J.-C.; Poinot, T.; Lin, J.; Oustaloup, A.; Levron, F. Modeling and identification of a non integer order system. In Proceedings of the European Control Conference, Karlsruhe, Germany, 31 August–3 September 1999. [Google Scholar]
- Benchellal, A.; Poinot, T.; Trigeassou, J.-C. Approximation and identification of diffusive interfaces by fractional models. Signal Proc. 2006, 86, 2712–2727. [Google Scholar] [CrossRef]
- Benchellal, A.; Poinot, T.; Trigeassou, J.-C. Fractional Modelling and Identification of a Thermal Process. J. Vib. Control 2008, 14, 1403–1414. [Google Scholar] [CrossRef]
- Battaglia, J.; Cois, O.; Puigsegur, L.; Oustaloup, A. Solving an inverse heat conduction problem using a non-integer identified model. Int. J. Heat Mass Transf. 2001, 44, 2671–2680. [Google Scholar] [CrossRef]
- Battaglia, J.-L.; Maachou, A.; Malti, R.; Melchior, P.; Oustaloup, A. Nonlinear heat diffusion simulation using Volterra series expansion. Int. J. Therm. Sci. 2013, 71, 80–87. [Google Scholar] [CrossRef]
- Maachou, A.; Malti, R.; Melchior, P.; Battaglia, J.-L.; Oustaloup, A.; Hay, B. Application of fractional Volterra series for the identification of thermal diffusion in an ARMCO iron sample subject to large temperature variations. In Proceedings of the 18th IFAC World Congress (IFAC WC’11), Milano, Italy, 28 August–2 September 2011. [Google Scholar]
- Maachou, A.; Malti, R.; Melchior, P.; Battaglia, J.-L.; Oustaloup, A.; Hay, B. Thermal identification using fractional linear models at high temperatures. In Proceedings of the 4th IFAC Workshops on Fractional Differentiation and its Applications (IFAC FDA’10), Badajoz, Spain, 18–20 October 2010. [Google Scholar]
- Malti, R.; Sabatier, J.; Akçay, H. Thermal modeling and identification of an aluminium rod using fractional calculus. In Proceedings of the 15th IFAC Symposium on System Identification, Saint-Malo, France, 6–8 July 2009. [Google Scholar]
- Drapaca, C.; Sivaloganathan, S. A fractional model of continuum mechanics. J. Elast. 2012, 107, 107–123. [Google Scholar] [CrossRef]
- Sumelka, W. Thermoelasticity in the framework of the fractional continuum mechanics. J. Therm. Stress. 2014, 37, 678–706. [Google Scholar] [CrossRef]
- Lazopoulos, K.; Lazopoulos, A. On fractional bending of beams. Arch. Appl. Mech. 2016, 86, 1133–1145. [Google Scholar] [CrossRef]
- Bennett, S. A Brief History of Automatic Control. IEEE Control Syst. 1996, 16, 17–25. [Google Scholar] [CrossRef]
- Bode, H. Network Analysis and Feedback Amplifier Design; D. Van Nostrand. Co.: New York, NY, USA, 1945. [Google Scholar]
- Miller, K.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley: New York, NY, USA, 1993. [Google Scholar]
- Samko, S.; Kilbas, A.; Marichev, O. Fractional Integrals and Derivatives: Theory and Applications; Gordon and Breach: Amesterdam, The Netherlands, 1993. [Google Scholar]
- Oustaloup, A. Etude et Réalisation d’un Systme D’asservissement D’ordre 3/2 de la Fréquence d’un Laser à Colorant Continu; Universitu of Bordeaux: Bordeaux, France, 1975. [Google Scholar]
- Oustaloup, A. La Commande CRONE; Hermes: Paris, France, 1991. [Google Scholar]
- Oustaloup, A. La Dérivation non Entière: Théorie, Synthèse et Applications; Hermes: Paris, France, 1995. [Google Scholar]
- Moreau, X.; Altet, O.; Oustaloup, A. Fractional differentiation: An example of phenomenological interpretation. In Fractional Differentiation and Its Applications; Ubooks Verlag: Neusäß, Germany, 2005; pp. 275–287. [Google Scholar]
- Moreau, X.; Ramus-Serment, C.; Oustaloup, A. Fractional Differentiation in Passive Vibration Control. J. Nonlinear Dyn. 2002, 29, 343–362. [Google Scholar] [CrossRef]
- Ortigueira, M. Introduction to fractional linear systems. Part 1. Continuous-time case. IEE Proc. Vis. Image Signal Process. 2000, 147, 62–70. [Google Scholar] [CrossRef]
- Magin, R.; Ortigueira, M.; Podlubny, I.; Trujillo, J. On the fractional signals and systems. Signal Process. 2011, 91, 350–371. [Google Scholar] [CrossRef]
- Machado, J.-A. Fractional Order Systems. Nonlinear Dyn. 2002, 29, 315–342. [Google Scholar] [CrossRef]
- Ionescu, C.; Machado, J.; de Keyser, R. Modeling of the Lung Impedance Using a Fractional-Order Ladder Network With Constant Phase Elements. IEEE Trans. Biomed. Circuits Syst. 2011, 5, 83–89. [Google Scholar] [CrossRef] [PubMed]
- Ortigueira, M.; Machado, J.-A.; Trujillo, J.; Vinagre, B. Advances in Fractional Signals and Systems. Signal Process. 2011, 91, 350–371. [Google Scholar] [CrossRef]
- Tejado, I.; Vinagre, B.; Torres, D.; Pérez, E. Fractional disturbance observer for vibration suppression of a beam-cart system. In Proceedings of the 10th International Conference on Mechatronic and Embedded Systems and Applications, Senigallia, Italy, 10–12 September 2014. [Google Scholar]
- Assaf, R.; Moreau, X.; Daou, R.A.Z.; Christohpy, F. Analysis of hte Fractional Order System in hte thermal diffusive interface—Part 2: Application to a finite medium. In Proceedings of the 2nd International Conference on Advances in Computational Tools for Engineering Applications, Beirut, Lebanon, 12–15 December 2012. [Google Scholar]
- Assaf, R. Modélisation des Phénomènes de Diffusion Thermique Dans un Milieu fini Homogène en vue de L’analyse, de la Synthèse et de la Validation de Commandes Robustes. Ph.D. Thsis, Université de Bordeaux, Bordeaux, France, 2015. [Google Scholar]
- Christophy, F.; Moreau, X.; Assaf, R.; Daou, R.A.Z. Temperature Control of a Semi Infinite Diffusive Interface Medium Using the CRONE Controller. In Proceedings of the 3rd International Conference on Control, Decision and Information Technologies (CoDIT’16), St. Julian’s, Malta, 6–8 April 2016. [Google Scholar]
- Daou, R.A.Z.; Moreau, X.; Christophy, F. Temperature Control of a finite Diffusive Interface Medium Applying CRONE Second Generation. In Proceedings of the 3rd International Conference on Advances in Computational Tools for Engineering Applications, Beirut, Lebanon, 13–15 July 2016. [Google Scholar]
- Lanusse, P.; Malti, R.; Melchior, P. CRONE control system design toolbox for the control engineering community: Tutorial and case study. Philos. Trans. R. Soc. 2013, 371, 20120149. [Google Scholar] [CrossRef] [PubMed]
- Oustaloup, A. Systèmes Asservis Linéaires d’Ordre Fractionnaire; Masson: Paris, France, 1983. [Google Scholar]
- Oustaloup, A. La Dérivation d’Ordre Non Entier; Hermes: Paris, France, 1995. [Google Scholar]
- CRONE Group. CRONE Control Design Modul; Bordeaux University: Bordeaux, France, 2005. [Google Scholar]
- Daou, R.A.Z.; Moreau, X.; Christophy, F. Temperature control of a finite diffusive interface medium using the third generation CRONE controller. In Proceedings of the 20th IFAC World Congress Program, Toulouse, France, 9–14 July 2017. [Google Scholar]
- Lanusse, P.; Nelson-Gruel, D.; Lamara, A. Toward a CRONE toolbox for the design of full MIMO controllers. In Proceedings of the 7th International Conference on Fractional Differentiation and Its Applications (IFAC-IEEE-ICFDA’16), Novi Sad, Serbia, 18–20 July 2016. [Google Scholar]
- Oustaloup, A.; Melchior, P.; Lanusse, P.; Cois, O.; Dancla, F. The CRONE toolbox for Matlab. In Proceedings of the IEEE International Symposium on Computer-Aided Control System Design, Anchorage, AK, USA, 25–27 September 2000. [Google Scholar]
- Malti, R.; Melchior, P.; Lanusse, P.; Oustaloup, A. Towards an object oriented CRONE toolbox for fractional differential systems. In Proceedings of the 18th IFAC World Congress, Milano, Italy, 28 August–2 September 2011. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | (rad/s) | (rad/s) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| m2/s | W·K−1·m−2·s0.5 | K·s0.5·W−1 | L = 0.25 m | L = 0.5 m | L = 1 m | x = 0 cm | x = 0.5 cm | x = 1 cm | |
| Cop. | 117 × 10−6 | 3.72 × 104 | 0.269 | 19 × 10−4 | 4.68 × 10−4 | 1.17 × 10−4 | Infinite | 4.68 | 1.17 |
| Alu. | 97 × 10−6 | 2.41 × 104 | 0.416 | 16 × 10−4 | 3.88 × 10−4 | 0.97 × 10−4 | Infinite | 3.88 | 0.97 |
| Iro. | 23 × 10−6 | 1.67 × 104 | 0.596 | 3.68 × 10−4 | 0.92 × 10−4 | 0.23 × 10−4 | Infinite | 0.92 | 0.23 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moreau, X.; Abi Zeid Daou, R.; Christophy, F. Comparison between the Second and Third Generations of the CRONE Controller: Application to a Thermal Diffusive Interface Medium. Fractal Fract. 2018, 2, 5. https://doi.org/10.3390/fractalfract2010005
Moreau X, Abi Zeid Daou R, Christophy F. Comparison between the Second and Third Generations of the CRONE Controller: Application to a Thermal Diffusive Interface Medium. Fractal and Fractional. 2018; 2(1):5. https://doi.org/10.3390/fractalfract2010005
Chicago/Turabian StyleMoreau, Xavier, Roy Abi Zeid Daou, and Fady Christophy. 2018. "Comparison between the Second and Third Generations of the CRONE Controller: Application to a Thermal Diffusive Interface Medium" Fractal and Fractional 2, no. 1: 5. https://doi.org/10.3390/fractalfract2010005