
Joint Time-Frequency Signal Processing Scheme in Forward Scattering Radar with a Rotational Transmitter

 ,
,
Abstract
:1. Introduction
2. FSR System Topology and Overview
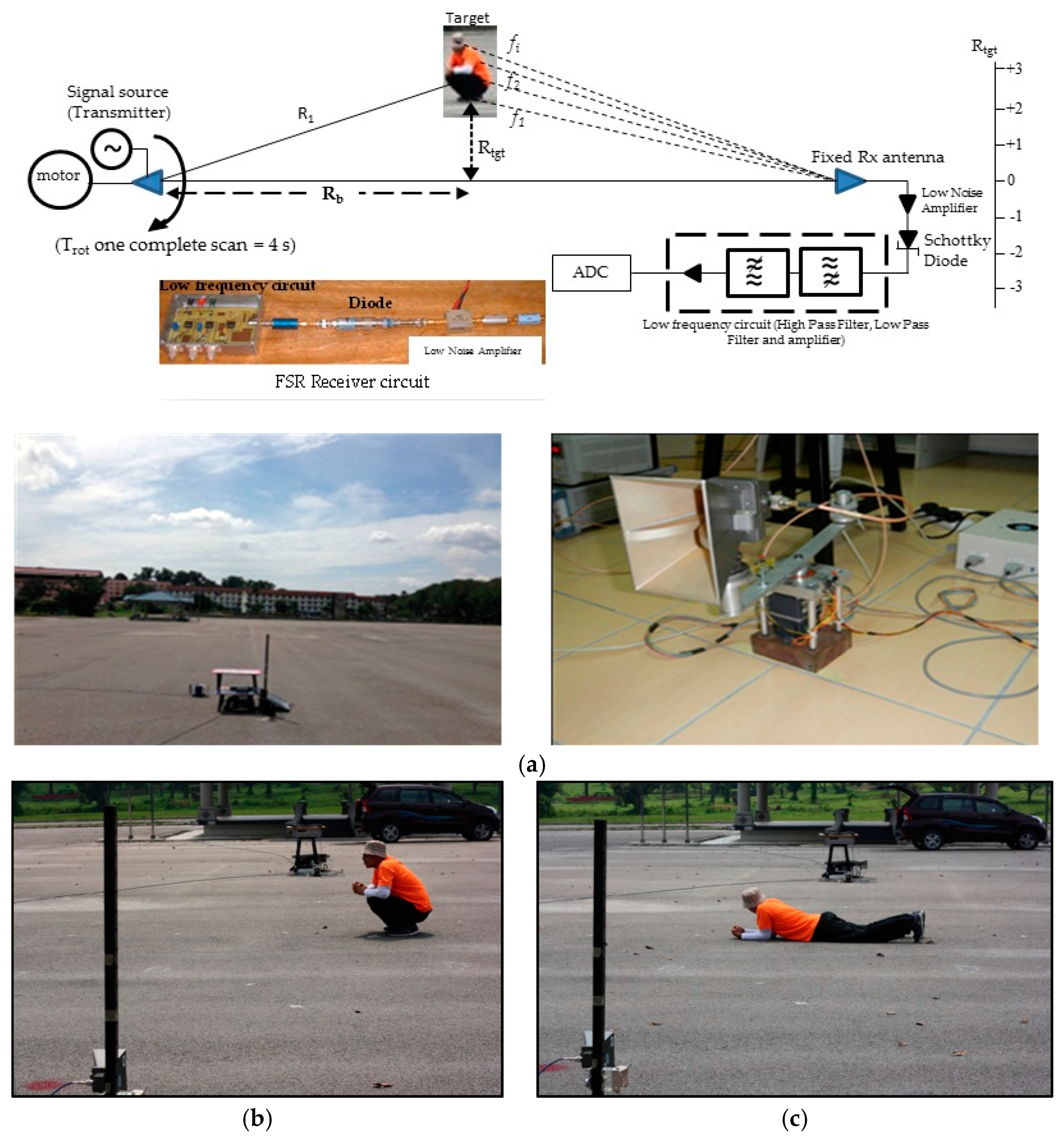
2.1. Practical Realization of FSR with Rotational Scanning Transmitter
- direct signal, Sdr_r, and its Doppler shift, ωdr_r
- signal scattered from an object, Ssc_r, with scattered Doppler shift, ωsc_r; hence, the signal at the input of the receiver, Srx_r, will be:
3. Practical Application of FSR with the Rotational Transmitter: Intruder Detection
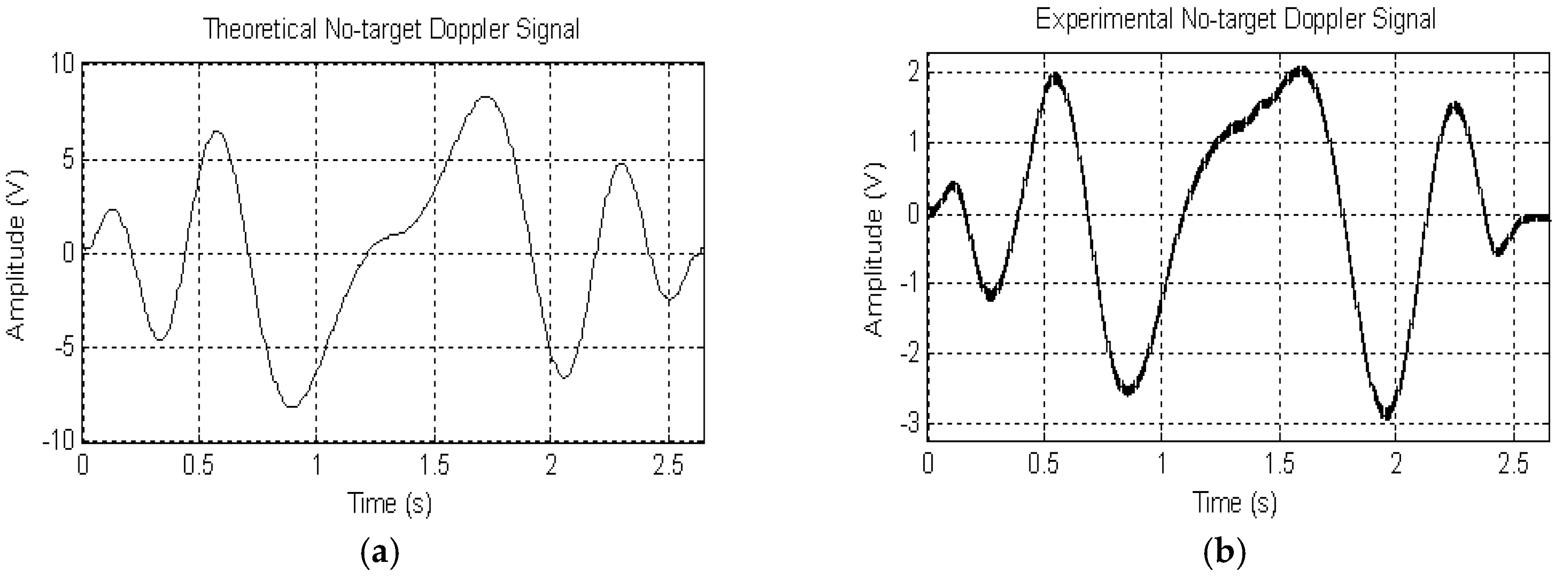
- Target sitting and stationary (without any movement),
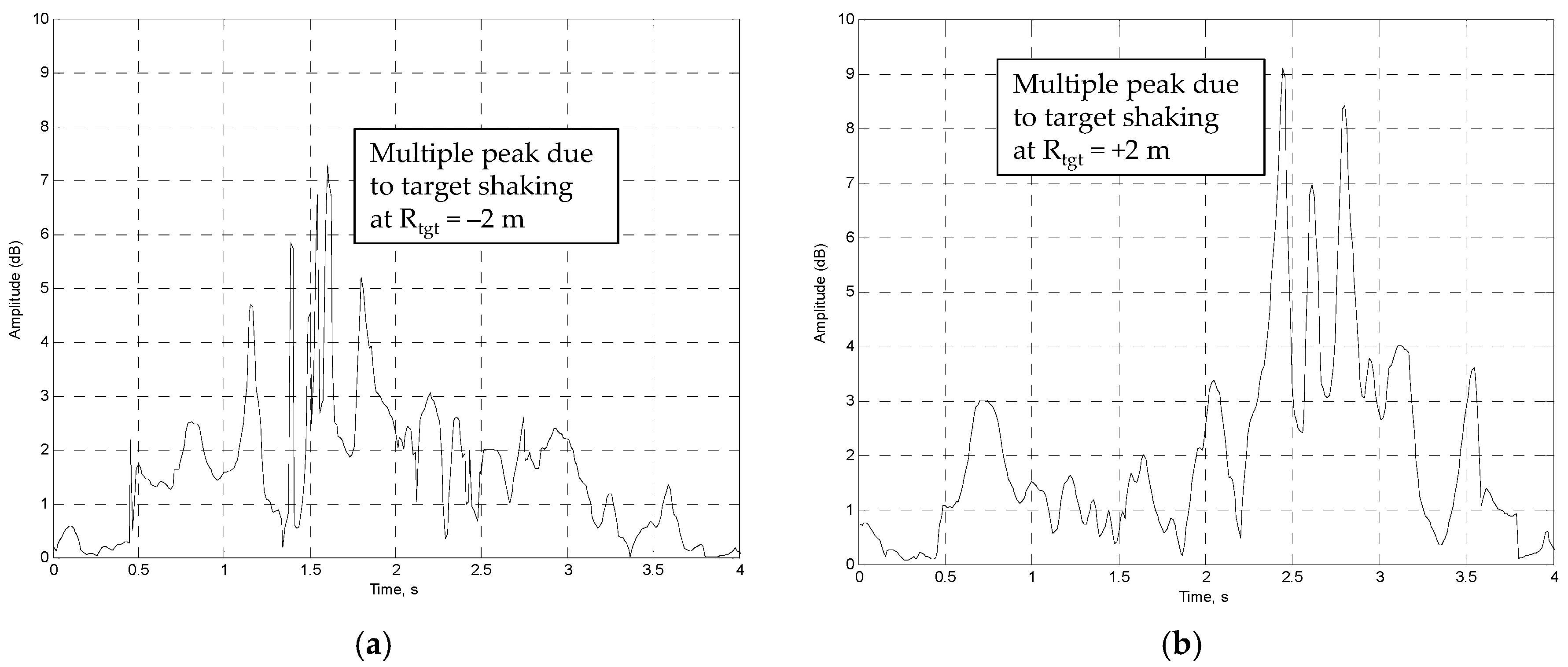
- Target sitting with slightly shaking mode and
- Target moving (crawling), slowly crossing the FSR baseline.
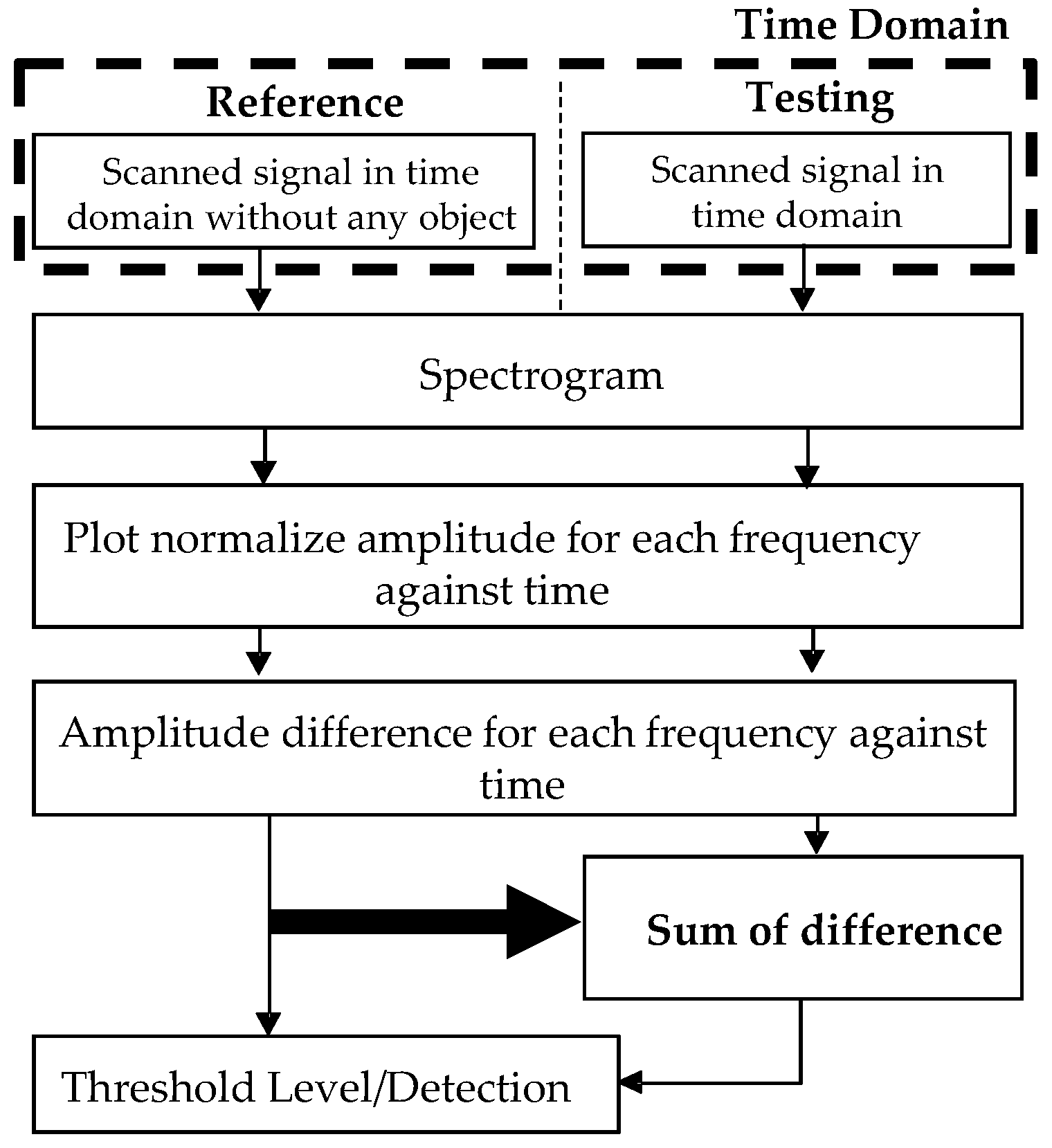
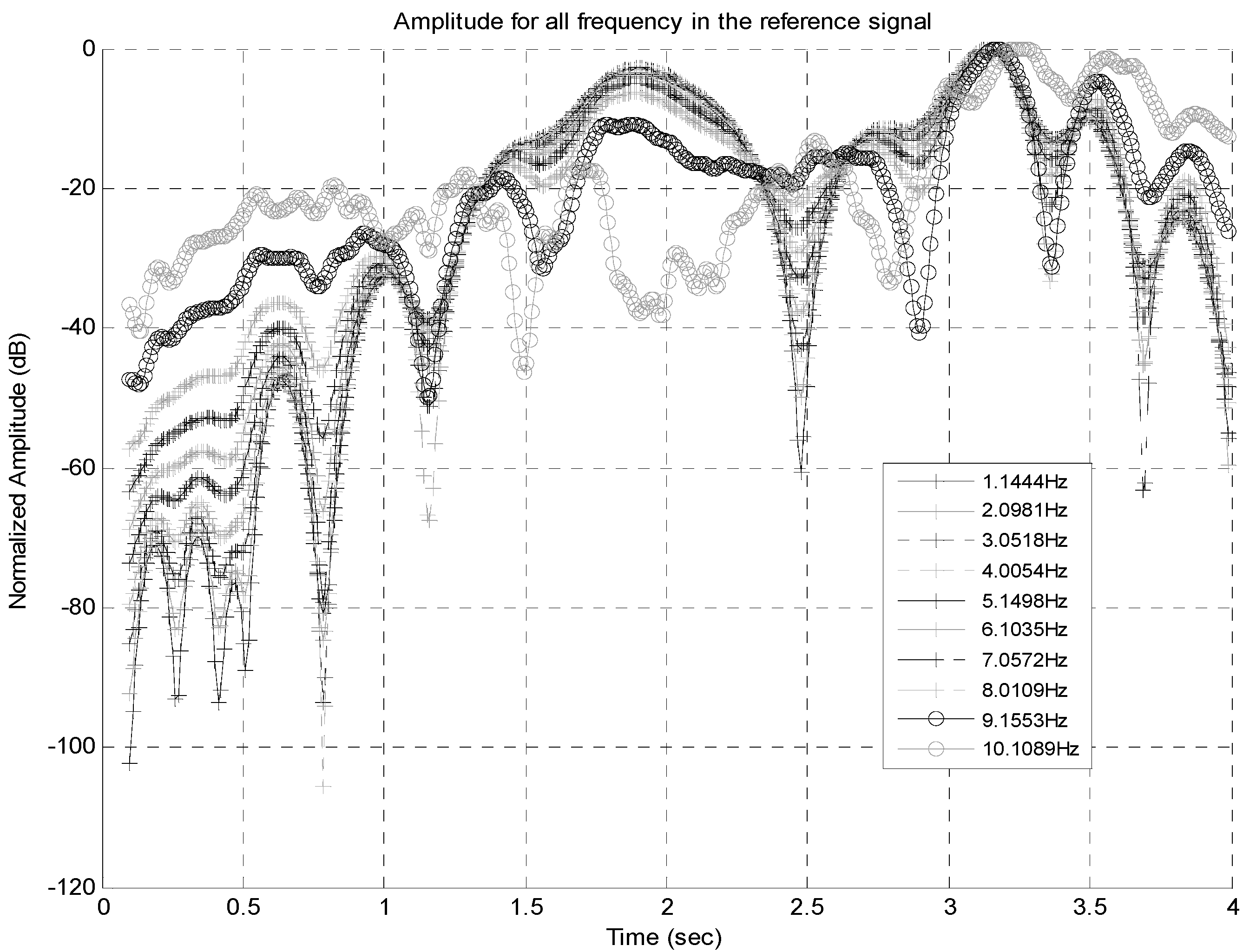
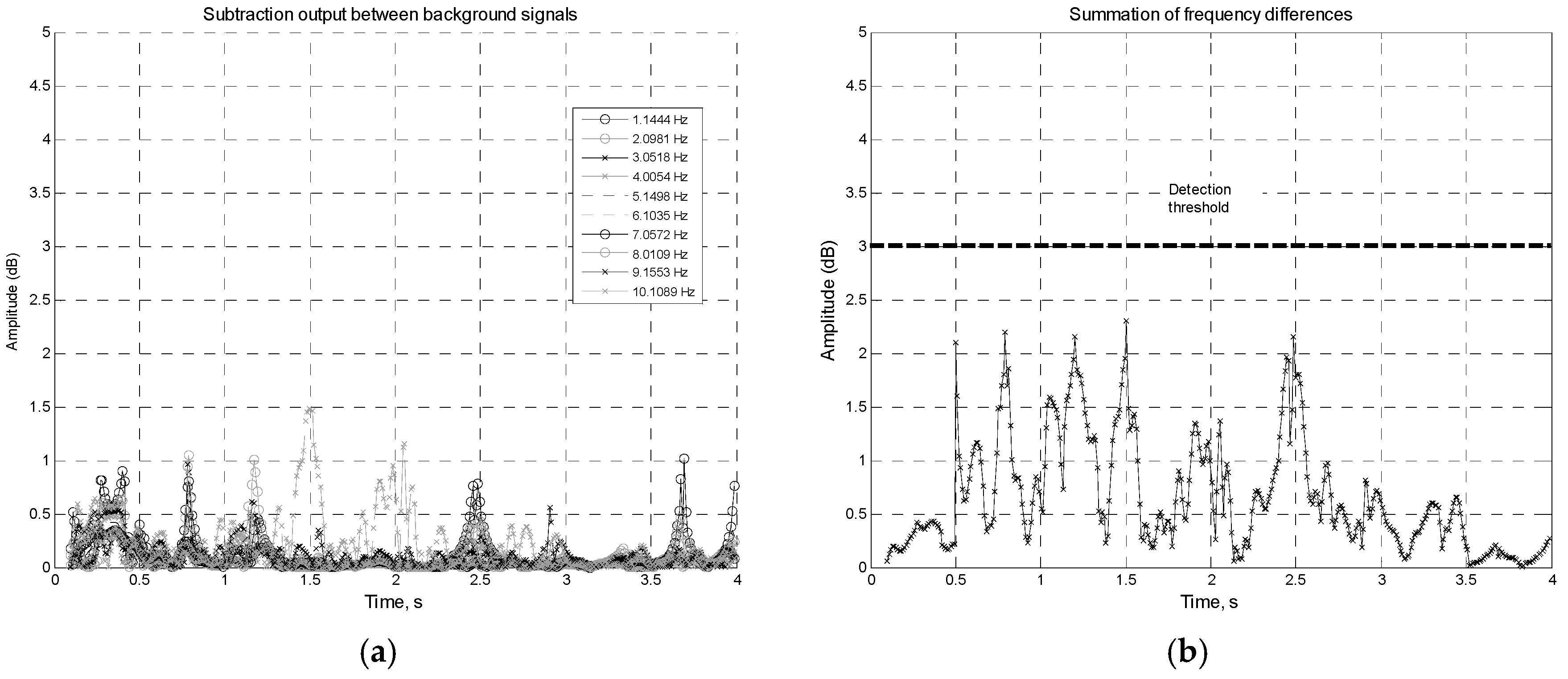
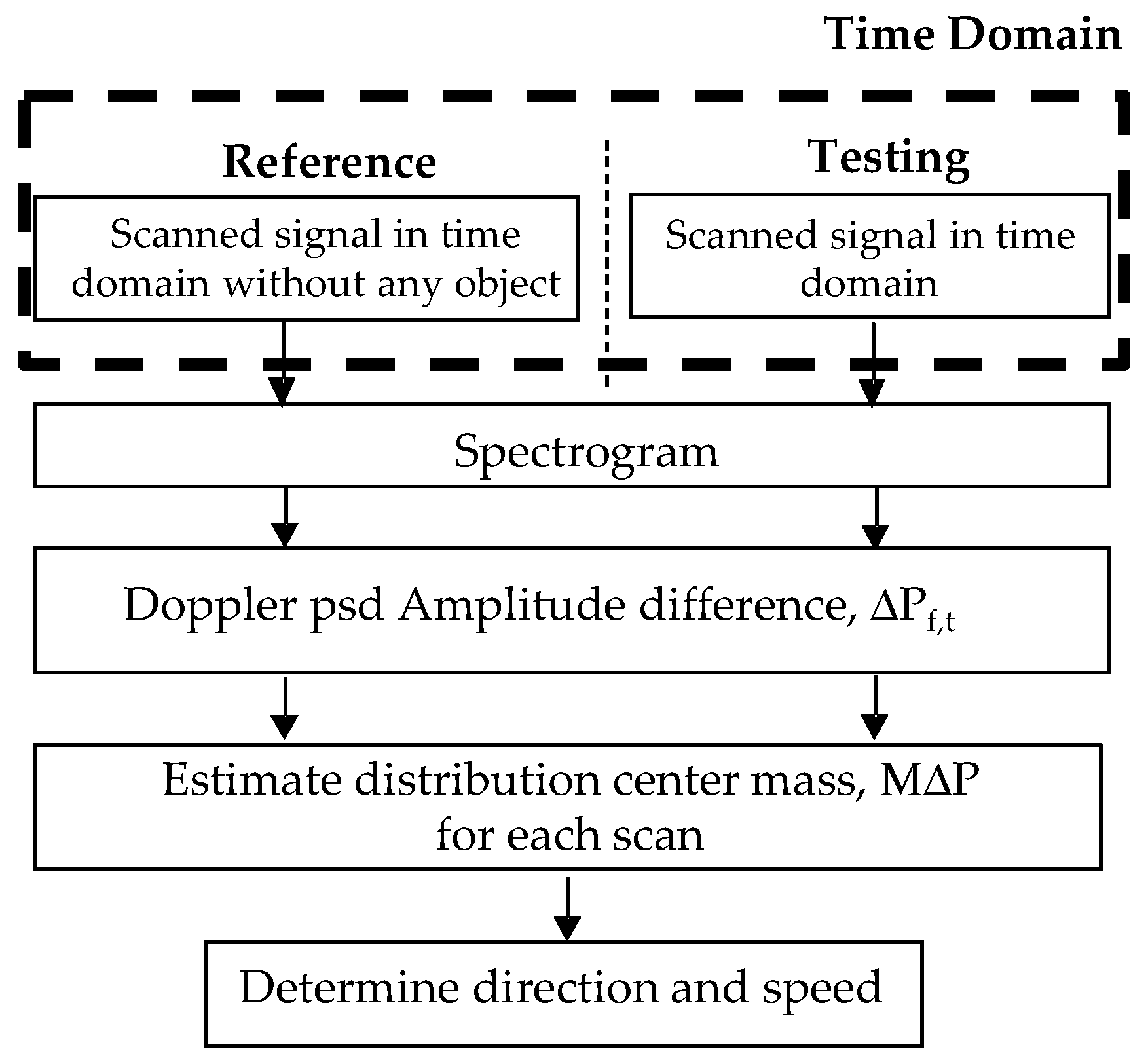
4. Joint T-F-Based Target Detection and Localization
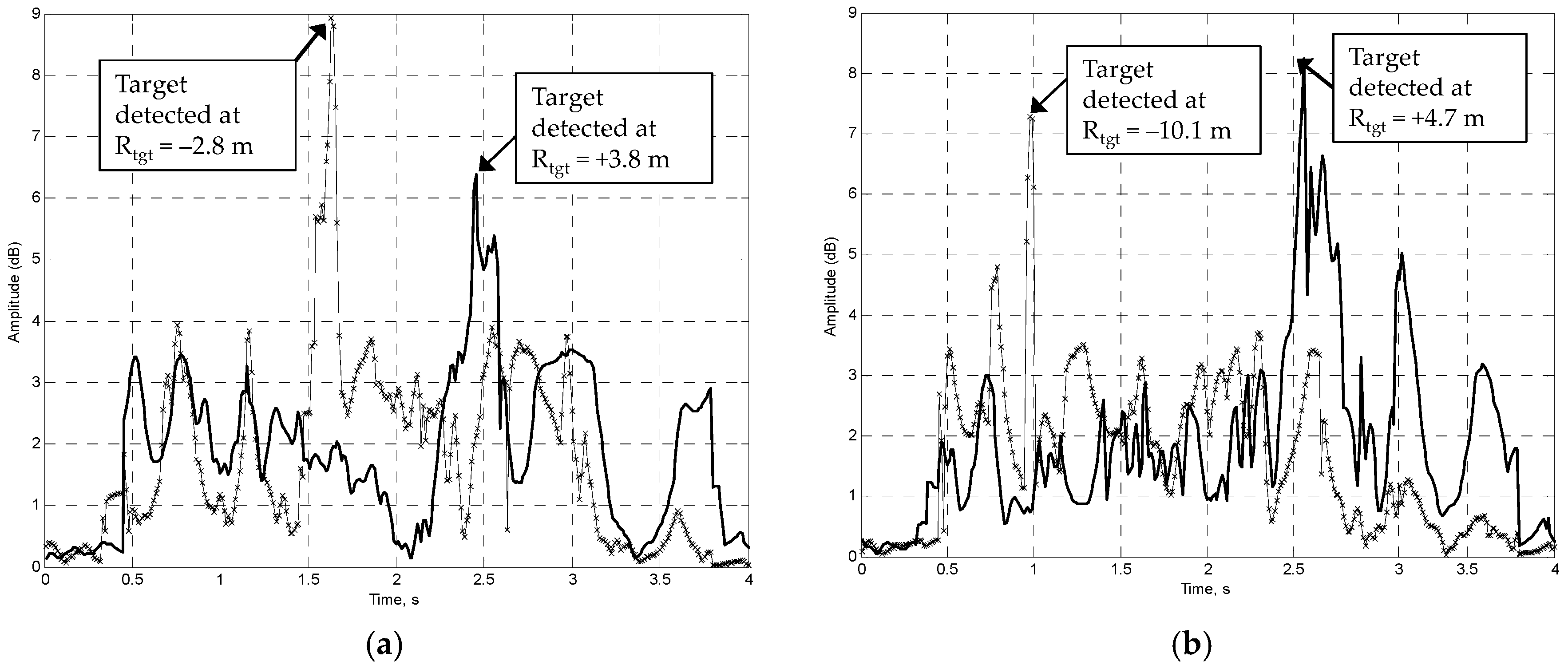
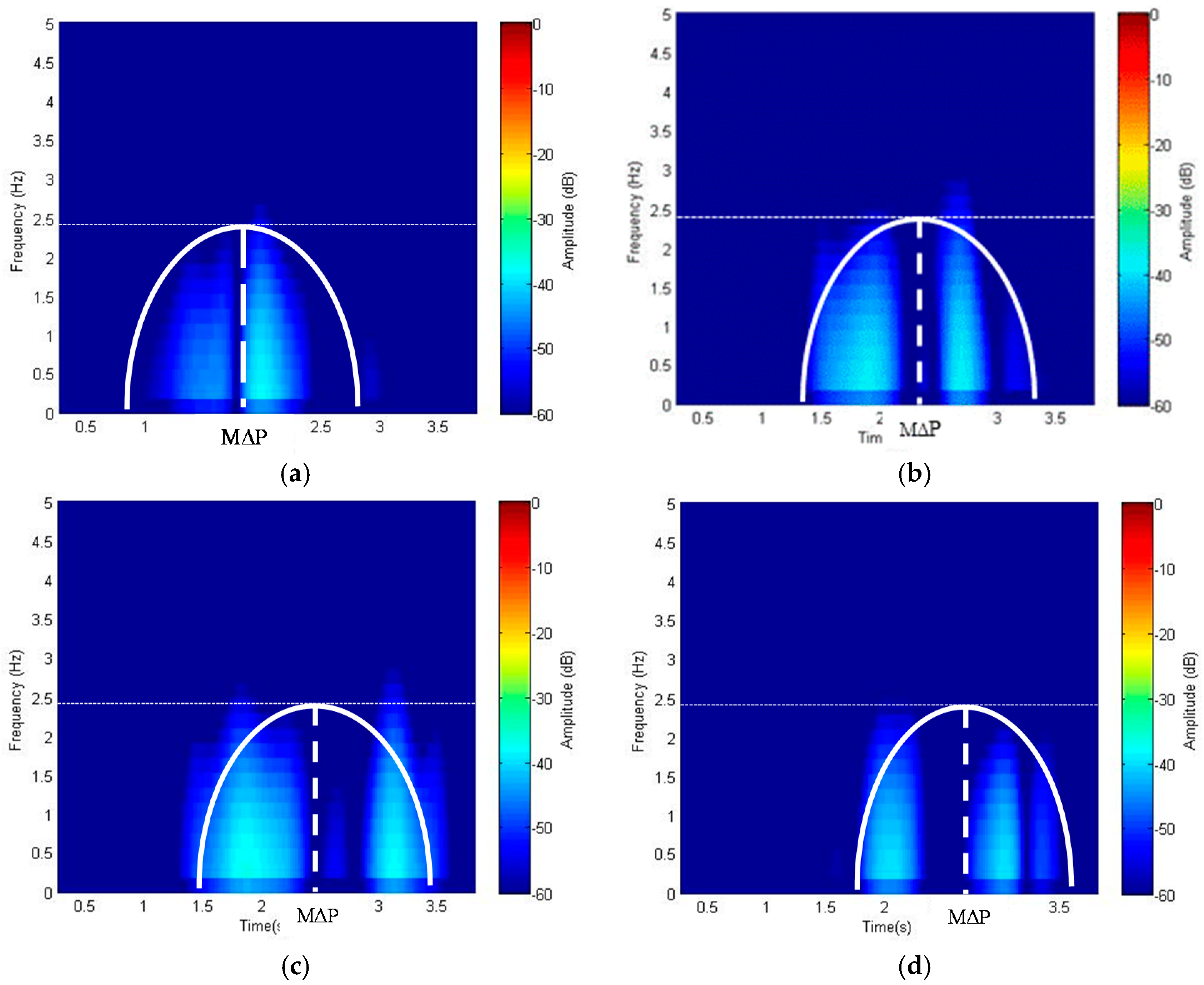
4.1. Stationary Target Detection and Localization
4.2. Moving Target Detection and Localization
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Cherniakov, M. Bistatic Radar: Principles and Practice, 1st ed.; John Wiley & Sons: Chichester, UK, 2007. [Google Scholar]
- Glaser, J. Forward Scatter Radar for Future Systems. WSTIAC Q. 2011, 10, 3–8. [Google Scholar]
- Skolnik, M.I. Radar Handbook, 2nd ed.; McGraw-Hill Professional: New York, NY, USA, 1989. [Google Scholar]
- Blyakhman, A.B.; Runover, I.A. Forward scattering radiolocation, bistatic RCS and target detection. In Proceedings of the 11th IEEE/AESS Radar Conference on Radar into the Next Millennium, Waltham, MA, USA, 20–22 April 1999.
- Blyakhman, A.B.; Myakinkov, A.V.; Ryndyk, A.G. Measurement of target coordinates in three-dimensional bistatic forward-scattering radar. J. Commun. Technol. Electron. 2006, 51, 397–402. [Google Scholar] [CrossRef]
- Chapurskiy, V.V.; Sablin, V.N. SISAR: Shadow inverse synthetic aperture radiolocation. In Proceedings of the Record of the IEEE 2000 International Radar Conference, Alexandria, VA, USA, 7–12 May 2000.
- Cherniakov, M.; Abdullah, R.R.; Jancovic, P.; Salous, M.; Chapursky, V. Automatic ground target classification using forward scattering radar. IET Proc. Radar Sonar Navig. 2006, 153, 427–437. [Google Scholar] [CrossRef]
- Raja Abdullah, R.S.A.; Rasid, M.F.A.; Mohamed, M.K.H. Improvement in detection with forward scattering radar. Sci. China Inf. Sci. 2011, 54, 2660–2672. [Google Scholar] [CrossRef]
- Hassan Mohamed, M.K.; Cherniakov, M.; Rasid, M.F.A.; Raja Abdullah, R.S.A. Automatic Target detection using wavelet technique in forward scattering radar. In Proceedings of the EuRAD 2008, Amsterdam, The Netherlands, 30–31 October 2008.
- Hu, C.; Sizov, V.; Antoniou, M.; Gashinova, M.; Cherniakov, M. Optimal signal processing in ground-based forward scatter micro radars. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3006–3026. [Google Scholar] [CrossRef]
- Daniel, L.; Gashinova, M.; Cherniakov, M. Maritime target cross section estimation for an UWB FSR network. In Proceedings of the EuRAD 2008, Amsterdam, The Netherlands, 30–31 October 2008.
- Hristo, K.; Vera, B.; Ivan, G.; Dorina, K.; Liam, D.; Kalin, K.; Marina, G.; Mikhail, C. Experimental verification of maritime target parameter evaluation in forward scatter maritime radar. IET Radar Sonar Navig. 2015, 9, 355–363. [Google Scholar]
- Gashinova, M.; Daniel, L.; Cherniakov, M.; Lombardo, P.; Pastina, D.; De Luca, A. Multistatic forward scatter radar for accurate motion parameters estimation of low-observable targets. In Proceedings of the International Radar Conference, Lille, France, 13–17 October 2014.
- Abdullah, R.R.; Salah, A.A.; Aziz, N.A.; Rasid, N.A. Vehicle recognition analysis in LTE based forward scattering radar. In Proceedings of the IEEE Radar, Philadelphia, PA, USA, 2–6 May 2016.
- Gashinova, M.; Daniel, L.; Hoare, E.; Sizov, V.; Kabakchiev, K.; Cherniakov, M. Signal characterisation and processing in the forward scatter mode of bistatic passive coherent location systems. EURASIP J. Adv. Signal Proc. 2013, 2013, 13–16. [Google Scholar] [CrossRef]
- Abdullah, R.A.R.; Ali, A.M.; Rashid, N.E.A. Stationary object detection in forward scattering radar. In Proceedings of the IET Radar Conference, Hangzhou, China, 14–16 October 2015.
- Martelli, T.; Colone, F.; Lombardo, P. First experimental results for a wifi-based passive forward scatter radar. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016.
- Gildas, K.; Christophe, B.; Philippe, P. Shadow radiation: Relations between Babinet principle and physical optics. In Proceedings of the 2014 IEEE Antennas and Propagation Society International Symposium (APSURSI), Memphis, TN, USA, 6–11 July 2014.
- Glaser, J.I. Bistatic RCS of complex objects near forward scatter. IEEE Trans. Aerosp. Electron. Syst. 1985, 21, 70–78. [Google Scholar] [CrossRef]
- Beasley, P. Tarsier\, a unique radar for helping to keep debris off airport runways. In Proceedings of the IET Seminar on the Future of Civil Radar, London, UK, 15 June 2006.
- Radar, R.H. CFAR thresholding in clutter and multiple target situations. IEEE Trans. Aerosp. Electron. Syst. 1983, 19, 608–621. [Google Scholar]
- Preiss, M.; Stacy, N.J.S. Coherent Change Detection: Theoretical Description and Experimental Results; Report No. DSTO-TR-1851; Defence Science and Technology Organisation: Salisbury, UK, 2006. [Google Scholar]
- Ajadi, O.A.; Meyer, F.J.; Webley, P.W. Change detection in synthetic aperture radar images using a multiscale-driven approach geophysical institute. Remote Sens. 2016, 8. [Google Scholar] [CrossRef]
- Antoniou, M.; Liu, F.; Zeng, Z.; Sizov, V.; Cherniakov, M. Coherent change detection using GNSS-based passive SAR: First experimental results. In Proceedings of the IET International Conference on Radar Systems (Radar 2012), Glasgow, UK, 22–25 October 2012.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Antenna angular velocity () | 0.378π rad/s |
| Antenna arm length (r) | 0.25 m |
| Rx antenna position () | (10 m,15 m) |
| Actual Position, Rtgt from FSR Baseline, (m) | Antenna Look Angle, θ1 = (ts/Trot)×180° | Estimated Rtgt from As (m) Rtgt = Rb × tan(90° − θ1) |
|---|---|---|
| −2 | 15.75° | −2.82 |
| +2 | 20.81° | +3.8 |
| −4 | 45.28° | −10.1 |
| +4 | 25.17° | +4.7 |
| Scan i | Scan ii | Scan iii | Scan iv | |||
|---|---|---|---|---|---|---|
| M∆P (s) | 1.96 | 6.31 | 10.47 | 14.6 | ||
| Antenna look angle, θ1 , (Trot = 4 s) | 88.2° | 103.95° | 111.15° | 117° | ||
| Distance from baseline Rtgt (m) Rtgt = Rcross × tan(90°–θ1) for M∆P < 2 s Rcross × tan(θ1–90°) for M∆P > 2 s | −0.314 | +2.484 | +3.869 | +5.095 | ||
| ∆M∆P (s) (M∆Pscann − M∆Pscann−1) | 4.35 | 4.16 | 4.13 | |||
| Speed (m/s) | 0.63 | 0.34 | 0.30 | |||
| Average speed | 0.42 m/s (misclassified by 0.8 m/s) | |||||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raja Abdullah, R.S.A.; Mohd Ali, A.; Rasid, M.F.A.; Abdul Rashid, N.E.; Ahmad Salah, A.; Munawar, A. Joint Time-Frequency Signal Processing Scheme in Forward Scattering Radar with a Rotational Transmitter. Remote Sens. 2016, 8, 1028. https://doi.org/10.3390/rs8121028
Raja Abdullah RSA, Mohd Ali A, Rasid MFA, Abdul Rashid NE, Ahmad Salah A, Munawar A. Joint Time-Frequency Signal Processing Scheme in Forward Scattering Radar with a Rotational Transmitter. Remote Sensing. 2016; 8(12):1028. https://doi.org/10.3390/rs8121028
Chicago/Turabian StyleRaja Abdullah, Raja Syamsul Azmir, Azizi Mohd Ali, Mohd Fadlee A. Rasid, Nur Emileen Abdul Rashid, Asem Ahmad Salah, and Aris Munawar. 2016. "Joint Time-Frequency Signal Processing Scheme in Forward Scattering Radar with a Rotational Transmitter" Remote Sensing 8, no. 12: 1028. https://doi.org/10.3390/rs8121028
APA StyleRaja Abdullah, R. S. A., Mohd Ali, A., Rasid, M. F. A., Abdul Rashid, N. E., Ahmad Salah, A., & Munawar, A. (2016). Joint Time-Frequency Signal Processing Scheme in Forward Scattering Radar with a Rotational Transmitter. Remote Sensing, 8(12), 1028. https://doi.org/10.3390/rs8121028