
A Review of Real-Time Implementable Cooperative Aerial Manipulation Systems

1
School of Electrical and Computer Engineering, National Technical University of Athens, 157 80 Athens, Greece
2
Department of Electrical and Computer Engineering, University of Denver, Denver, CO 80210, USA
*
Author to whom correspondence should be addressed.
Drones 2024, 8(5), 196; https://doi.org/10.3390/drones8050196
Submission received: 17 March 2024
/
Revised: 1 May 2024
/
Accepted: 9 May 2024
/
Published: 12 May 2024
(This article belongs to the Special Issue Selected Papers from the 2023 International Conference on Unmanned Aircraft Systems (ICUAS 2023))
Abstract
:This review paper focuses on quadrotor- and multirotor-based cooperative aerial manipulation. Emphasis is first given to comparing and evaluating prototype systems that have been implemented and tested in real-time in diverse application environments. The underlying modeling and control approaches are also discussed and compared. The outcome of this review allows for understanding the motivation and rationale to develop such systems, their applicability and implementability in diverse applications and also challenges that need to be addressed and overcome. Moreover, this paper provides a guide to develop the next generation of prototype systems based on preferred characteristics, functionality, operability, and application domain.
1. Introduction
Research and development in unmanned aerial vehicles (UAVs) or unmanned aircraft systems (UASs) has witnessed unprecedented scientific and commercial interest and growth, particularly during the last two decades. Although military applications dominated the global market for years, interest in using UAVs in civil and public domains increases exponentially, worldwide, albeit with challenges related to integrating unmanned aviation into the national airspace. Sample applications include, but are not limited to, surveillance [1], search and rescue [2], aerial photography [3], fire monitoring [4], agriculture [5], and aerial delivery [6]. The listed applications refer to solely passive tasks, that is, tasks in which no UAV interaction with the environment is needed. However, contact with the environment is required in industrial and maintenance applications like bridge inspection, water damn inspection, high-voltage transmission line inspection [7], assembly tasks [8], or construction [9]. This requirement is in addition to, obviously, navigation and control, stability consideration, and accurate manipulation, to say the least.
When focusing on aerial manipulation [10], based on requirement analysis, specifications, and applications, different multirotor designs and configurations with attached robotic arms offer alternative solutions to perform tasks under full teleoperation, autonomously or semi-autonomously; these tasks are considered to be dangerous for human operators and also costly [7]. The multirotor configuration and its structure allows for hovering and for performing complex maneuvers while reaching high altitudes quickly, thus, facilitating the completion of aerial manipulation tasks in diverse environments.
Aerial manipulation has challenges that need to be addressed and overcome, like stability in the presence of forces/torques from the attached manipulator or payload and because of complicated dynamics due to under-actuation and payload weight constraints. Many challenges have already been considered in the literature [11]. However, there still exist challenges related to cooperative aerial manipulation, where two or more aerial platforms (multirotors) manipulate or transport a payload that is too heavy or too big for a single multirotor to carry [10].
Cooperative aerial manipulation may impact the human workforce in highly repetitive and heavy work or in remote and dangerous areas that are inaccessible to humans. Applications involving the transportation of heavy objects, such as boxes in warehouses or beams in construction sites, may increase safety and reduce costs, also resulting in performing complex operations without human intervention. In addition, proper object manipulation by two or more multirotors that dynamically adjust their orientation adds to the overall coordination, particularly in cases involving precise positioning and interaction with the environment. The risk of damage to both the object being manipulated (e.g., fragile packages, medical supplies) and the surrounding environment may be reduced by precise manipulation. Mission complexity, on top of the overall multirotor system complexity, is higher because of the required task(s) distribution, planning, coordination, and cooperation among the arms [12].
When considering hard real-time (or almost hard real-time) implementable cooperative aerial manipulation multirotor systems, specific challenges that need to be addressed include, among others:
- Ability to navigate in uncertain environments (i.e., poor GPS or GPS denied areas). Real-time SLAM, adaptation to unforeseen events, dynamic collision avoidance, planning and re-planning, and safe flight based on onboard sensor suites are minimum requirements for safe navigation.
- Power and energy requirements (battery consumption), algorithm computational complexity, execution time, effective payload, and maximum takeoff weight (MTOW) must be considered as they affect flight-time, range, and endurance.
- Robust communication among platforms is essential, with minimum or no delays (due to latency, transmission loss, etc.), as well as minimum or no down-time.
- System stability must be tackled since, as stated in [13], wind gusts, random wind profiles, aerodynamic perturbations, and induced, parasitic, and other types of drag may affect accurate manipulation and navigation.
- On the regulation front, regulations dictate that a certified pilot must operate a UAV—this refers to teleoperation as an alternative to semi-autonomous or autonomous functionality (for safety reasons). Obviously, autonomous flight may be needed in certain applications.
This review paper centers around reviewing real-time implementable cooperative aerial manipulation systems. It presents modeling and control approaches, and it summarizes their advantages and limitations. Throughout the survey, the term ’system’ refers to, and includes, the multirotor platform(s), attached robotic manipulator/arm, navigation and control approaches, and grasping capabilities.
The rest of the paper is organized as follows. Section 2 summarizes the search method that has been followed throughout the survey. Section 3 provides a concise summary of aerial manipulation. Section 4 classifies different approaches to cooperative aerial manipulation including: cooperative cable-suspended manipulation; multiple multirotors transporting an object tethered with cables; aerial manipulation with multi-DOF arms; multirotors with robotic arms; ground-air manipulation; aerial robots cooperating with ground vehicles; manipulation of flexible objects; multirotors carrying flexible objects instead of rigid ones; and rigidly object attached multirotors. Section 5 discusses modeling approaches to cooperative aerial manipulation, that is, Newton–Euler, Euler–Lagrange, and also, combined methods. Section 6 presents and classifies the adopted, derived, and used control techniques (controller design techniques) in four categories; control of plain manipulation/transportation; control in the presence of wind; and vision-based control and teleoperation. Section 7 offers the discussion, it summarizes the results and concludes the survey. It is stated that Section 3 and Section 4 are enhanced versions of the authors’ previous work [14] that was published in the 2023 International Conference on Unmanned Aircraft Systems (ICUAS), while Section 5 and Section 6 are completely new.
2. Search Method
The search method that was followed to identify related articles and previous reviews on the subject of “cooperative aerial manipulation” is shown in Table 1. Published research papers with experimental demonstrations, as well as experiments with simulations and numerical results, are also included and classified. Although the complexity of such systems and, mostly, any experimental validation are both crucial as they provide proof-of-concept demonstration in terms of applicability and implementability, it is also important for the research community to be aware of all the developments in cooperative aerial manipulation, of the research maturity in the field, and of all developments from the early conceptual design stage to actual real-time implementation and testing. The included papers have been reviewed for originality and technical quality, while considering their relevance with the previously mentioned challenges. Note that thesis and unpublished research papers (that were found through an internet search) are not included in the survey.
3. Literature Review on Aerial Manipulation
The review of aerial manipulation focuses mostly on published research during the last decade. As mentioned in [10,13], aerial manipulation has mostly been demonstrated in indoor environments. The representative research that includes testing in outdoors settings and in real world scenarios is found in [15]. In [10], authors state that aerial manipulation may be divided into three categories according to the specific platform, manipulation arms, navigation, perception, and planning.
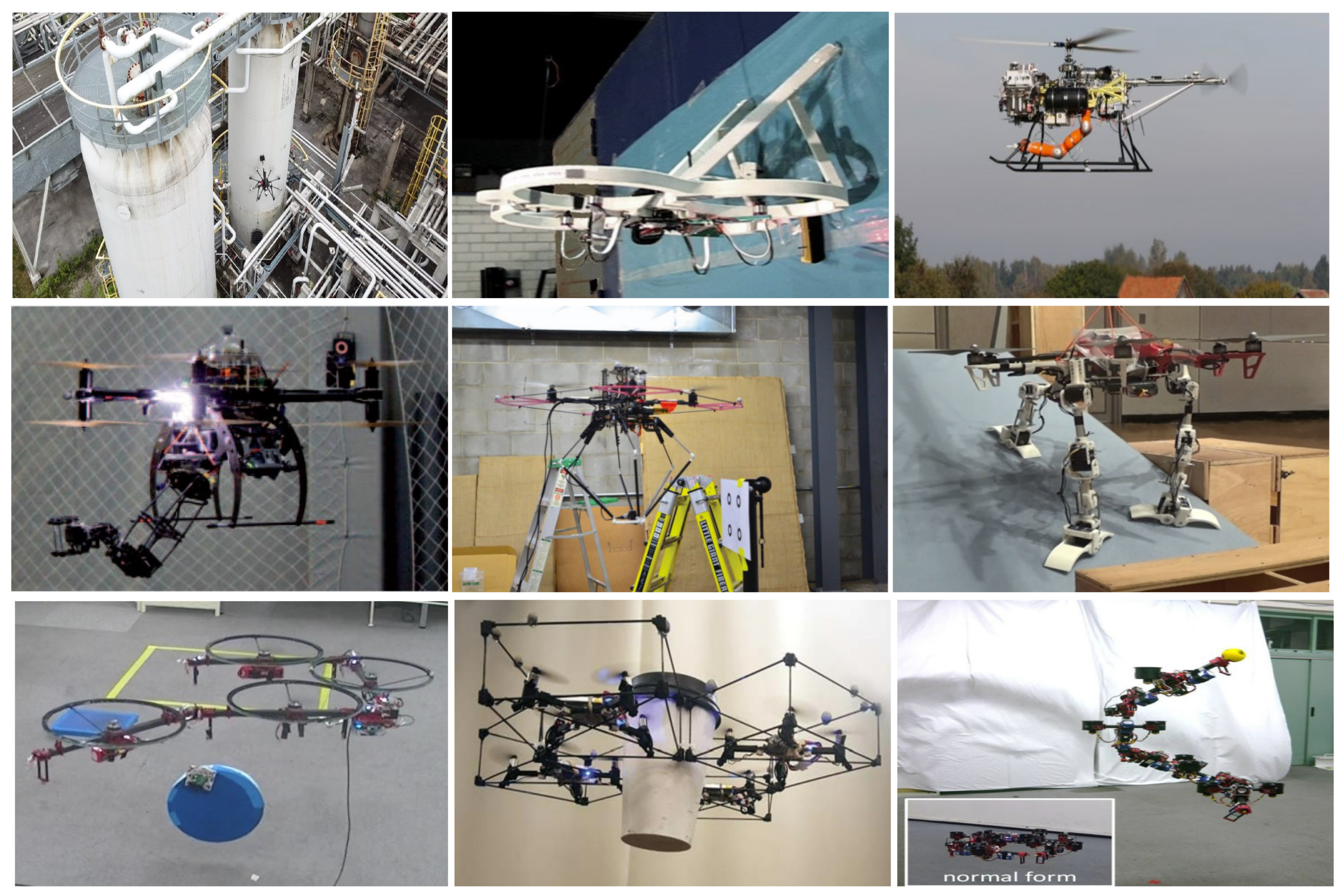
The early research has centered on using mostly quadrotors and helicopters with embedded arms. Conducted experiments are mainly indoors using motion tracking systems, without considering perception or planning. An early demonstration of an aerial manipulation system is presented in [16]; a quadrotor applies contact forces to a wall while hovering stably, see Figure 1. Prototypes designed for transportation tasks may grasp objects using several types of gripping mechanisms [17]. Built prototypes are also shown to perform assembly/construction of a cubic structure using 1-DoF arm [9]. Other designs [18] use a miniature quadrotor equipped with a 3-DoF delta structure arm and a 3-DoF end-effector to physically interact with the environment. More innovative platforms include a ducted-fan miniature platform [19] and a 6-DoF gantry crane equipped with two 4-DoF manipulators [20]. Helicopters have also been used for load transportation using tethers [21] in search and rescue applications or for grasping objects mid-flight, using a manipulator-gripper, as demonstrated in [22].
The use of multirotors, like hexacopters and octacopters, which have better capabilities in precision, planning, and perception, is indicative of the next arsenal for outdoors applications [23]. The attached manipulator(s) have six and/or seven DoF [24,25], see Figure 1, while the overall system includes an onboard GNSS navigation systems, vision-based controllers, hyper redundant arms [26], and other robust controllers. Other hybrid systems that include visual servoing and position-based control [27] and experimental prototypes involving a hexarotor with a 4-DoF planar robotic arm and an attached stereo camera [28] are also shown in Figure 1. In Figure 1, quadrotors equipped with a 6-DoF parallel manipulator are depicted that demonstrate high precision of the end-effector’s position [29]. The exploration of enhanced workspace capabilities is discussed in [30], where a hexarotor equipped with a parallel 3-DoF aerial manipulator is used.
The current trends in aerial manipulation include the utilization of SLAM algorithms to navigate in complex environments with more accurate pose estimation [31,32] and target localization [33]. Such systems include platforms with tilted or tiltable [34] propellers, allowing for (under-actuated) multirotors to exhibit full actuation properties. In addition, tiltable multirotor configurations seem to offer advantages in applications related to inspection and maintenance. In [35], a tiltable hexarotor with an attached end-effector performs inspection and maintenance tasks sliding along a horizontal plane or performing peg-in-hole tasks. In [36], a tilted hexarotor with a 2-DoF lightweight arm performs push-and-slide tasks on curved surfaces. Experiments in a refinery with realistic scenarios for pipe inspection are demonstrated in [15]; a tiltable octarotor equipped with a 6-DoF robotic arm and an end-effector with wheels and embedded inspection sensors performs semi-autonomous point contact and slide tasks, see Figure 1.
Several prototype systems address perception without using markers. In [37], an uncalibrated image-based visual servo strategy is proposed to drive the arm end-effector to a desired position. Outdoor path planning experiments are discussed in [37]; random tree star (RRT*) algorithms are implemented for a quadrotor with two arms path planning for long-reach manipulation in cluttered environments. Dual arm manipulators are also adopted in [38], although in a cable suspended configuration; they are suitable for aerial tool delivery to human operators performing power line inspection tasks. Increased dexterity and the need to replicate human hands has lead to prototypes as in [39], where 4-DoF anthropomorphic dual arms are integrated with a hexarotor. Multiple arms appear to provide flexibility during landing [40]. A quadrotor equipped with three 3-DoF arms demonstrates landing in uneven terrains Figure 1.
Figure 1.
Examples of Aerial Manipulation Systems: [15,16,25,27,29,40,41,42,43] (from left to right, top to bottom).
Aerial manipulation may also be classified in categories that depend on the nature of the manipulation task. These categories reflect cooperative aerial manipulation (which is reviewed in this paper), teleoperation, and interconnected actuated multibody designs. The latter is a newly introduced class of aerial manipulation with mechanically connected actuators capable of changing their shape while flying. The authors in [41] present a transformable configuration that consists of four rotors separated by 4-links, see Figure 1. Between the links, a servo-motor allows for the system to move in the horizontal plane and, therefore, to change its shape. In the conducted experiments, the platform is capable of carrying two cable hanging objects while keeping its balance and stability. A similar platform with a flying gripper system is proposed in [42]; four modular robots are surrounded by a carbon fiber cage, hence, attached to each other with magnets, see Figure 1. They create an aperture in the middle of the attachment, the docking mechanism of the payload. In-flight shape transformation and object manipulation using the whole body of a fully-actuated serial-link structure platform are also shown in [43], see Figure 1. In addition, configurations of this type, but on a larger scale and tethered to the ground, seek to overcome challenges related to limited battery life, payload capacity, sensing, and control [44].
For teleoperation, the regulatory and safety needs require more human intervention and supervision. Feedback is required to provide sense of touch to the operator (i.e., bilateral haptic feedback) and guidance (i.e., visual feedback). Specifically in [45], a teleoperation framework for psychical contact with the environment is introduced. A human operator utilizes a haptic device to navigate a quadrotor through a virtual environment and to apply forces on surfaces with a rigidly attached passive tool. In [46], a swarm of quadrotors, with a fixed tool attached, may transport objects in a virtual environment by receiving commands from the motions of a human hand; fingertip motions are tracked using an RGB-D camera. Indoor and outdoor experiments also demonstrate different manipulation tasks [47]. A flying robot (SAM [48]) using onboard visual sensors helps the user navigate the end-effector in order to grasp an object and, through virtual reality, achieve 3D visual feedback.
4. Cooperative Aerial Manipulation
4.1. Cable-Driven
The most researched area in cooperative aerial manipulation relates to cable-suspended multirotors that carry an object. An early demonstration of this category is presented in [49]; three quadrotors manipulate a triangular payload connected with cables, see Figure 2. The mathematical model with forward and inverse kinematics is presented considering inter-robot collisions and cable-tension (positive tension). This approach suffers from multiple solutions in forward kinematics and from the inability to reduce/eliminate oscillations, resulting in slow motions, see Section 6. However, in [50], the authors address and solve the multiple solution problem by applying cone-constraint conditions, achieving a unique payload solution. In [51], an uncertainty-aware controller for a fly-crane system is developed, and it is experimentally tested, see Figure 2.
The previously published research [49,50,51] has used quasi-static models without considering the dynamics of the payload or high-speeds. In [52], the authors introduced a differentially flat hybrid system accommodating either a point-mass load or a rigid-body load. The simulations and experimental results with the same triangle-payload with a three quadrotors setup have shown that the hybrid method is superior compared to quasi-static models.
Field experiments in the presence of high wind gusts are illustrated in [21,53]; a slung-load transportation scheme using small helicopters is introduced with potential in carrying heavier loads, see Figure 2. A similar system has been evaluated when functioning under wind gust profiles in [54], although only in simulation. Outdoor experiments have been conducted in the presence of wind using three network-delayed quadrotors that carry a spherical load [55]. After extensive experimental demonstration with two or three quadrotors and different payload weights, the authors in [56] mention that transportation with no consideration of payload motion or disturbances, and with no measurements of relative positioning, is feasible in outdoor environments.
On-board sensing enhances the system’s responsiveness and decision-making capabilities in dynamic environments, as many prototypes require it to ensure precise control and navigation in scenarios where external data input may be limited or unreliable. In [57], two quadrotors transport a cable-suspended load, a rod attached via magnets, at moderate speeds, see Figure 2. This is achieved using only on-board visual sensing and without any explicit communication. The control is based on the leader–follower approach, and to reduce complexity, the authors consider trajectory in a straight line at a constant height. On-board state estimation has been adopted in [58]. In [59], vision-based state estimation, see Figure 2, demonstrated successful experiments with three micro air vehicles (MAVs) carrying a triangular object. A similar experiment was presented in [60]. The authors proposed a nonlinear model predictive control (NMPC) method enabling manipulation in all six DoF. As opposed to vision-based methods [57,59], the authors in [61] investigate a vision-less control scheme that focuses on the follower quadrotor; the leader is controlled by an operator while the follower estimates its state from an onboard IMU based on a two-stage EKF-based estimation strategy. The authors claim that this method is suitable for small UAVs with limited computational requirements, although the payload is modeled as a point mass. Nevertheless, indoor and outdoor experiments have produced successful results.
Figure 2.
Cable-Driven Aerial Transportation: [21,51,57,59,62,63,64,65,66] (from left to right, top to bottom).

The leader–follower approach is a popular one as it simplifies the coordination of multiple agents, allowing for efficient navigation and control. The leader–follower setting and transporting a rod appear in [67]; the authors propose a decentralized scheme with communication based on the sensing of contact forces. Alternative approaches suggest designating the payload as the leader, offering a different perspective on control dynamics in systems where the payload’s position and behavior guide the entire operation. This is adopted in [62] where the payload (i.e., foam box with an on-board computer), rather than being treated as a disturbance, is explicitly controlled, see Figure 2. Successful results are demonstrated in indoor and outdoor environments. Similar to [62,68], payloads have a hardware configuration; they are customized to accommodate Ethernet cables for communication between vehicles. A different method, instead of using a master–slave setting, is adopted in [63]. Instead of following the leader, UAVs are working cooperatively to achieve the same goal; outdoor experiments have been completed using three hexarotors carrying a rigid object, see Figure 2.
In contrast to traditional cable-driven parallel UAVs with fixed anchor points, the authors in [69] propose a more challenging approach of a wrench set tethered multi-rotor with moving pulley anchor points, providing greater flexibility. The payload maximum acceleration is evaluated by taking advantage of the newly introduced capacity margin index. The feasible trajectories are optimized based on a tension distribution algorithm. Successful experiments have been conducted in indoor and outdoor environments; for the latter, all computations are carried out on the onboard computer.
Most research utilizes payloads with equal mass distribution because it simplifies the control algorithms and computational demands. Cooperative transportation of a non-uniform payload is addressed in [70]. The authors implemented a path planning technique with RRT* algorithms combined with B-Spline curve to avoid known obstacles. The simulation results were successful; however, the system strongly depends on reliable communication. Beyond RRT* algorithms, a number of studies also explore formation and sampled-based planning techniques to dynamically navigate around both known and unknown obstacles. Real-time formation planning in obstacle-filled environments is considered in [71], without relying on payload and cable length. Dynamic formation in obstacle-filled environments is presented in [72] without any assumption on the cable’s tension, nor the need for the payload’s measurements; the payload’s geometry is not taken into account. The focus on simulating real-world conditions in outdoor environments (different weather conditions) in the presence of obstacles is presented in [64]. Two hexacopters transport a large object through narrow passages, see Figure 2. Sampled-based path planning is developed to maintain the desired distance between the two UAVs during transportation, to prevent oscillations and increase robustness.
Coupled dynamics and geometric control are investigated in [73,74,75,76,77], focusing on enhancing the accuracy, although in-depth knowledge of both the system dynamics and the environment is required. The authors in [73] propose cooperative transportation of a suspended load using quadrotors based on specific assumptions of point-load mass and rigid without mass links. The point mass assumption is then replaced with a rigid load connected via flexible cables, where each flexible cable is modeled as a system of serially-connected links [75]. This approach allows for more precise control over the movements and deformations of the cable, enhancing the accuracy in simulating its behavior and dynamics. In both [73,75], successful simulation results are included. The work in [75] is extended in [76], where the theory is demonstrated with experimental results that include stabilization of the payload in the presence of external disturbances. Moreover, to solve the direct relation between the motion of the quadrotor and the motion of the payload, the authors in [78] focus on reconfigurable cable-driven parallel robots (RCDPR). This approach is more suitable for teleoperation though. It has been validated through physical simulations with a human-in-the-loop present. In [77], the authors propose a method that has advantages over the previously reported research in [73,74]. The geometric nonlinear controller does not require the linear and angular acceleration of the payload as well as the link information; thus, it is easier to implement in a real life scenario.
As opposed to the previous research on cable-driven manipulation, the authors in [79] do not assume that the cables are connected to the object. Instead, they automate the whole process by developing a system composed by two quadrotors connected by a hanging cable. The quadrotors wrap the cables around the cube-shaped object and pull. The box has no hooks; manipulation depends only on the friction between the box and the cables. This method has potential in fully autonomous operations, although demonstrated only in simulations.
Most of the recent research centers around heavy payloads [65,80], high speeds (1.6 m/) [81], anti-swing control [82], and robotic arms with cables [83]. Specifically, in [80], four multirotors transport a tethered heavy object under motion formation control. The implemented algorithms only require knowledge of the relative position measurements from the robots with respect to their neighbors; This approach is suitable for GPS-denied or adverse environments. Additionally, in [65], three multirotors transport a heavy object while passing though a narrow doorway, see Figure 2. The algorithm is efficient and runs on resource-constrained onboard computers. The less conventional designs in this category (i.e., combined cable-drive systems) explore payload tracking capabilities [83] and heavier payloads [84]. Instead of utilizing markers as in [59,62], the authors in [83] present a different method. A system of two aerial manipulators is adopted with a slung load connected to the end-effectors. The aerial manipulator tracks the load position. Although successful simulation results have been produced, the system has not been tested experimentally. Considering the combined cable-drive systems (e.g., [83] manipulators with cables), the authors in [84] developed a bar spherical joint structure that includes four quadrotors with four attached cables. This design increases safety during flight; according to the authors, this design reduces energy consumption. In a conducted lab experiment, it was demonstrated that the system could carry a heavier payload than common cable-suspended systems. Movement constraints have also been considered in [85]. In this work, the underlying leader–follower system has been studied as a nonholonomic one; the leader tracks the trajectory by receiving data from an IMU connected to the payload, while the follower is not allowed to undergo transverse motion. This method has no inter-agent communication. Lab experiments have shown proof-of-concept demonstration feasibility. However, the authors do mention that tracking errors seem to be affected by airflow and that a more practical IMU setup should be considered. Heterogeneous systems have also started to appear [86] in order to investigate inconsistencies, i.e., thrust uncertainties and aerodynamic and hardware uncertainties, which need to be modeled and controlled to obtain accurate cable force estimates. During the experiments, two different weight quadcopters are connected to a pipe by two uneven cables; through force-consensus control, the pipe tries to align with the ground, achieving shared mass distribution. The obtained results showed a successful demonstration under quasi static conditions.
4.2. Aerial Manipulation with Multi-DoF Arms
Tether-based approaches are popular since the tether that is connected at the center of mass of a multirotor does not generate additional torques on the multirotor [87]. Although this method supports the static equilibrium of the robot and object, the object cannot be directly adjusted or manipulated. This limitation is overcome by combining aerial robots with multi-DOF robotic arms, functioning as one system.
The authors in [88] solve the complicated dynamics of multiple quadrotor–manipulator systems and compute the cooperative force distribution among the robotic arms by proposing a hierarchical control framework, see Section 6. The proposed framework is versatile and adaptable as it allows the modification of only one block instead of redesigning the controller. Nevertheless, to bypass the dynamics complexity, the authors in [89] propose two impedance control laws to limit external and internal forces and to track the end effector’s reference trajectory with the rigid object grip assumption. However, the results in [88,89] are validated only via simulations.
Most of the experimental work in this category is lab-based. Two hexarotors equipped with multi-DoF arms (3-DoF [87], 2-DoF [90]) manipulate the pose of a rod-shaped object, see Figure 3. A first demonstration is presented in [91], where the authors propose an augmented adaptive sliding mode controller that accounts for the object’s dynamics, considering constraints about the grasping point. The desired path for each aerial manipulator is obtained by using an RRT* algorithm to transport the object to the desired position. The results in [91] are extended in [92], as the path planning algorithm (RRT*) is enhanced with Bezier curves to produce the required trajectory in known environments; dynamic movement primitives (DMPs) are utilized to avoid unknown obstacles. As for grasping, a commercial gripper is used in the experiments, see Figure 3, instead of the handle/hook configuration adopted in [91]. Aiming at real-time implementation, the results are further extended in [93] where a learning-based motion planner is proposed using a combination of the RRT* algorithm and parametric-DMPs (PDMPs). This method achieves faster and more efficient manipulation with concurrent object avoidance in an unknown environment, see Figure 3. The authors mention that the trade-off between motion optimality and the computational time of the proposed algorithm is balanced effectively in comparison to conventional approaches (e.g., sampling-based, optimization-based). In [90], the authors propose a framework for realistic applications that consists of an on-line estimator for the mass/inertial properties of an unknown payload, and an adaptive controller. Additionally, real-time obstacle avoidance is achieved by using an RGB-D camera and DMPs. The results are extended in [94], where the authors consider velocity and curvature constraints for collision-free, real-time smooth path planning algorithms. The proposed motion planning optimization approach achieves reduced computational costs. Although, in [90,93,94], Vicon systems still measure position information, re-planning is performed onboard. A successful demonstration with 3-DoF arms is presented in [87], although the end-effector is still rigidly attached to the object. By employing a robust control scheme and an NSB approach, see Section 6, this method succeeds in safe manipulation (i.e., collision avoidance between the rod and aerial vehicle) and internal force estimation without the use of force sensors (expensive, power consuming).
For simplicity reasons, the previously published research has focused on manipulating objects with uniform mass distribution. the recent research in [95] focuses on the control of an arbitrary mass object using two aerial manipulators. The control framework uses two estimation parameters; kinematic for relative distances and dynamic for the mass/center of mass of the payload by using an external wrench estimation algorithm. The results are validated via simulations under assumptions (e.g., PE (persistence of excitation conditions, a previously known configuration of the payload). Simulations also proved that force control in cooperative aerial manipulators does provide higher precision, although contact constraints require careful consideration. In [96,97], the authors present force-consensus and force control methods for cooperative aerial manipulators that could also be applied to a broader range of applications using rigid and flexible payloads.
The recent research [98] focuses on transportation without using any communication; a leader dictates motion (i.e., markers on the platform) and the followers use computer vision (i.e., equipped with RGB-D Cameras) in order to autonomously maintain formation with respect to the leader. The results are promising for practical applications; however, further experimental validation is still required.
4.3. Flexible Payload
The cooperative manipulation of a flexible payload has not been widely investigated. In [99], six quadrotors are rigidly attached to a thin, flexible ring, positioned with a titled angle, to perform transportation tasks in lab experiments, see Figure 4. The control design, see Section 6, is based on a linearized system around hover conditions that is capable of controlling deformations and desired positions. However, the system performs only horizontal transportation.
Vibration suspension is also investigated in [100,102]. Based on [103,104], the authors in [100] propose a distributed rotor-based vibration module (RVM) for the manipulation of a 2m aluminum bar. For the RVM design, authors consider maximized thrust with minimal torque along the plane that vibration occurs. They also utilize the controllability grammian to solve the optimal placement of the RVM on the flexible load. The experiments are implemented with a stationary robot arm and two tilted-rotors and they demonstrate successful vibration suspension, see Figure 4. The authors in [102] extend the work of [103] by considering a flexible payload. The controller succeeds to suppress the vibration of a long slender load, although only in simulations.
The recent research [101], in comparison with [99,105], introduces a nonlinear dynamic method for the whole system, a fictitious output for the trajectory and an augmented linearized state feedback controller, see Section 6. To eliminate the movement that may be produced between the two octarotors and the flexible beam, the latter is connected to the robots using permanent magnets, see Figure 4. The lab experiments show satisfactory results regarding trajectory performance and the beam’s dynamic deformations.
4.4. Ground–Air
Collaboration between unmanned ground vehicles (UGV) and UAVs is a field of cooperative aerial manipulation that has emerged recently; however, it is beneficiary as ground robots offer higher payload capacity while drones offer unlimited workspace [10]. In [106], a quadrotor and a ground vehicle (UGV) manipulate the pose of a rod showing successful simulation and lab experimental results, see Figure 5. New approaches utilizing a multiple aerial–ground manipulator system (MAGMaS) [103,104] offer larger workspace and movement freedom than the planar movement cart experiment presented in [106]. To be specific, in [103], the lab experimental results showed successful applicability of the cooperation between a ground manipulator (KUKA LWR4) and a quadrotor; both manipulate the pose of a heavy and long wooden bar, see Figure 5. The ground manipulator grasps the object rigidly while the aerial robot is connected to it via a passive spherical joint. This setup was later extended in [104], where the spherical joint was replaced by the OTHex multirotor [107] (i.e., tilted hexacopter with multi directional thrust ability and unique configuration allowing the manipulation of long objects), and the ground manipulator by a KUKA 7-DoF LBR-iiwa, see Figure 5. Teleoperation, larger workspace, and gripper actions are proposed in this work; however, without advanced perception. Nevertheless, the indoor demonstration experiments with both systems to cooperatively grasp and manipulate a rod showed successful results.
Focusing on the larger workspace and enhanced capabilities, in [108], a leader–follower model predictive control (MPC) is proposed with obstacle avoidance. The setup is composed of a hexarotor and a ground vehicle, both equipped with robotic arms and grippers, see Figure 5. In the lab experiments, the heterogeneous robots are holding and manipulating a plastic bar while performing maneuvers in order to avoid two different obstacles. Regarding the results, the authors mention that an error is present due to imperfect low-level control tracking, but the system still reacts successfully to disturbances. The method relaxes from strong assumptions widely found in the literature (i.e., rigid grasping robot–object points). However, the MPCs run on an off-board computer in the same network, and the robots are grasping the object a priori.
The recent research focuses on human–robot collaboration for transporting objects [109,110]. In [110], the human and the quadrotor, in unison, lift and transport a rod in an outdoor experiment. The operator initiates the task by grabbing the payload from one end with the help of a human handle device (HHD)—a custom built sensor that estimates human commands. At the other end, the UAV is equipped with a cable attitude device (CAD), which also provides state feedback. In a similar lab experiment in [109], a vision-based velocity observer tracks human estimated velocity. This technique eliminates the need to measure the robot velocity measurement, see Figure 5.
4.5. Rigidly-Attached
An other line of research in cooperative aerial manipulation is rigidly attached multirotors transporting a payload. This configuration can benefit from its mechanical simplicity while carrying heavier objects.
A first demonstration of this idea was presented in [111], where the authors address the problem of cooperative grasping/transporting using multiple quadrotors. The control was implemented by combining decentralized (angular velocity) and centralized (position, velocity, orientation) formulation. The grasping mechanism consists of a gripper capable of penetrating into surfaces using microspines in order to attach/release the payload (i.e., wood), see Figure 6. Two lab-based experiments are presented for validation; the first one was held with four quadrotors rigidly attached to a wooden planar payload with different quadrotor configurations (line, cross, L-shape, T-shape) and a second one with two quadrotors cooperatively grasping and transporting a rod. The work of [111] later extended in [112], where the authors developed a more passive grasping mechanism for the payload, using permanent electromagnets. Based on a nonlinear controller, localization and state estimation was succeeded through onboard IMU and camera instead of an external motion capture system as in [111]. The lab-based experimental results with two quadrotors transporting a rod showed increased agility, see Figure 6. Different approaches adopted mono-rotors rigidly attached to a rectangular heavy object, as in [113,114]. In [114], eight mono-rotors are attached to the payload using a variable attachment mechanism (i.e., rail mechanism), allowing the robots to slide and, hence, change the optimal attachment positions depending on the payload’s weight, see Figure 6. The conducted experiments of [113,114] were demonstrated indoors in lab experiments.
The results of [111,112,113,114,115] are more for transportation tasks than manipulation, as the payload cannot be directly controlled due to the under-actuation of the quadrotors [10]. The authors of [116,117] propose a platform that consists of multiple quadrotors connected to a frame by spherical joints (spherically-connected multiquadrotor or SmQ). The innovation of this method surpasses the limitation of under-actuation while also providing less energy consumption caused by the extra actuators. For the model and control design of [117], the authors considered constraints in the spherical joint range limit. The idea was demonstrated through various scenarios (i.e., motion tracking, hovering while acting force, telemanipulation), see Figure 6. However, not much information yet exists about the feasibility of this novel approach.
Spherical joint technology was also adopted in [118] for the collaborative transportation of a hexagon wooden structure, rigidly attached to three quadrotors, see Figure 6. The system succeeds in performing outdoor experiments using onboard sensing and no communication between partners. Furthermore, in [119], the authors present transportation tasks by three quadrotors, connected via spherical joints to a passive adhesive tool; the method is demonstrated only in simulation with human hardware-in-the-loop.

5. Modeling Approaches
Modeling approaches have been widely researched [11,120]. Modeling in aerial manipulation is mostly based on using either recursive Newton–Euler (N-E) or Euler–Lagrange (E-L) formulations. The former considers the multirotor/quadcopter and the manipulator as two distinct subsystems; it is best suited for actual implementation and testing. The latter considers the multirotor/quadcopter and the associated manipulator as a single system; it is most suitable for analytical techniques and to study the dynamic properties of the underlying system. In both cases, interdependence and interaction forces among the system components must be considered. Regardless of formulation, when it comes to cooperative aerial manipulation, the modeling complexity is increased. Next, the modeling formulations for cooperative aerial manipulation are presented, compared, and summarized in Table 2.
5.1. Newton–Euler Modeling Formulation
The category of cable-driven multirotors that follows the Newton–Euler formulation is generally applied using conventional dynamics principles, primarily focusing on how the system’s behavior is modeled. The critical elements include the representation of the cables (i.e., taut, mass-less, etc.) and the characterization of the payload (i.e., point mass or rigid body); both factors significantly influence the precision and effectiveness of the dynamic simulation. Point-mass loads [50] or taut cables [52,60,65,67] are preferred by many authors mainly because it simplifies the equations of motion and lead to more manageable calculations, improving the accuracy of dynamic analysis and control strategies. In [50], the quadrotors are modeled as a team of three point-model robots; they are considered a kinematic system while the payload is considered a single (dynamic) rigid body. Differential flatness using the N-E equations is demonstrated under two scenarios; point-mass load and rigid-model load [52]. Then, the individual models are enhanced considering that the tension in any of the cables drops to zero—this results in a hybrid system model. Point-mass load is also considered in [65,81]; however, now the N-E equations are modified to use quaternions that are more suitable for aggressive maneuvers and large angular displacements. Considering more realistic simulations of the forces and dynamics the system, in [67], aerial robots and a beam-like payload are modeled based on the N-E formulation but also considering the tension of the cable. A double integrator is developed for the closed loop translational dynamics. This method is applicable to multidirectional and unidirectional platforms. In [86], the system dynamics consider the thrust uncertainty, while the cable force is treated as a lumped disturbance. Slack cables presented in [50] increase mechanical compliance and introduce adaptability to the dynamic forces. In addition, dynamic forces such as aerodynamic effects, along with different cable models (like inextensible cable, spring/damper cable model, and rigid formation) are modeled in [62]. Another cable alternative was proposed in [109]; the cable is modeled as a unilateral spring with negligible mass. Moreover, no assumption is made about the cable’s state in [68]; the N-E method describes the dynamics of the system, while graph theory (e.g., incidence matrix) is followed to indicate the communication between quadrotors and the payload. The input delay is accounted for in the N-E equations of motion in the quadrotor-load modeling approach described in [55]. In [121], the cooperative transportation system is modeled without restricting the attachment point of the cable on the drone.
The dynamic model of the unmanned aerial manipulator (UAM) system [97] is derived following the recursive N-E method. The dynamics of the whole system (i.e., UAMs carrying an object) are derived by utilizing a leader–follower formation; the carried object acts as the ’coupler’ between the pair of UAMs and the exerted forces from both robots’ grippers are related to the object’s stiffness. The same strategy is adopted in [98], considering the wrench vector measured at the end-effectors’ force-torque sensor. The N-E approach is also used in [96], considering the deformation of the payload due to contact forces. In [99], a system of N quadrotors attached to a flexible payload is also modeled using a N-E formation that accounts the payload deformation.
In [111], a system of N quadrotors is modeled in which a payload is rigidly attached. The formulation allows for quadrotors to be mounted in different planes. The same equations of motion were also used in [112,113,115]. The equations of motion were further extended in [113], where robot failures are considered in the model. However, in contrast, refs. [112,113,115] do not position quadrotors in parallel planes. In [116,117], the N-E dynamics of N quadrotors and the SmQ frame are modeled under the assumption that a spherical joint is attached at the center of mass (CoM) of each quadrotor; furthermore, the limits of the spherical joints are incorporated into the model. In [118], spherical joints decouple the dynamic model of the system to translational and rotational dynamics, including aerodynamic forces and torques.
5.2. Euler–Lagrange
The scientific literature in the cable-driven category considers the usage of point-mass payloads due to their lower complexity [54,61,73], see Section 5.1. The Lagrange equations for the quadrotor–pendulum model in [57] consider both components as point masses with their positions parameterized. However, many papers adopted E-L methods, which consider a rigid payload instead of a point-mass load by developing a coordinate free dynamic model [74,75,76,77]. Specifically, in [75,76], the cables are modeled as a system composed of an arbitrary number of serially connected cables; the assumption of taut and mass-less cables is relaxed (which reduces stability in the case of aggressive maneuvers and aerodynamic effects in real-world conditions). Despite the challenges of cable modeling, to enhance the system’s maneuverability and stability, the authors have refined their modeling strategies by incorporating aerodynamic effects [54], developing equations of motion that link the orientation of the cables to the payload’s acceleration [77] and implementing a clear separation of motion [61]. The latter is proposed in [61] by adopting two auxiliary planes (i.e., in-plane and out-of-plane motion). The E-L formulation considers the masses of the payload and the follower during modeling; the leader accounts for defining the relative positions of the payload, and the follower defines the relative position with respect to the leader. This, however, does not directly impact the dynamic behavior of the overall system. In [82], the control inputs are decoupled from the system dynamics, providing redundancy.
In the ground–air category, in [106], the E-L method is followed to describe the dynamic relationship between the UAV, UGV, and the object, with the assumption that friction forces are negligible. In [103], the equations of motion are derived for each aerial and ground manipulator considering that the passive joints efficiently decouple the aerial manipulator’s rotational dynamics and external wrenches (i.e., resultant force of the manipulator arm). E-L approaches are also used to model the small deformation of the beam in the transportation system of two quadrotors with flexible payloads [101], as well as in the teleoperation system [119], consisting of a haptic device (master model) and a team of aerial robots attached to an object (slave model).
The E-L formulation is mostly followed to model aerial manipulation systems of higher complexity, which consist of multi-DoF arms [83,90,91,92,94]. For systems with many degrees of freedom that can be described using generalized coordinates, the E-L formulation often simplifies the mathematical complexity. Moreover, E-L equations have the ability to incorporate constraints directly into the equations of motion through the use of Lagrange multipliers. Force distribution solutions [122] at each grasping point [91] or considering the forces exerted by end-effectors during grasping [89] ensure that each contact point can dynamically adjust to changes. The kinematic model of the grasp in [89] considers these contact forces in the model (i.e., balancing the object’s dynamics and the contact forces due to interacting with the environment and internal forces). The twist of the payload is also added in the payload dynamics in [90,94]. Instead of assuming uniform mass distribution [92,93], in [95], the vector between the end-effector and the payloads’ center of mass is estimated for transportation of a payload with an arbitrary mass. Multi-DOF robotic arms may also be modeled with assumptions that include treating them as an exogenous system (i.e., that can be controlled independently) [87]. Lagrange equations have been formulated to represent a quadrotor–manipulator (QM) system equipped with a multi-DOF serial link arm [88]; dynamics decomposition is applied to decouple the QM system—this offers advantages (e.g., no inertial, Coriolis, and gravity coupling).
5.3. Other Modeling Methods
The cable-driven category is also dominant when the combined modeling methods are developed; assumptions such as point-mass loads and mass-less links are also present. The dynamic equations of motion for several helicopters (dynamics of the whole system) and a point-mass load are derived using the Kane method [21,53]. In [63,70], the Udwadia–Kalaba equations are adopted to calculate the constraint forces (i.e., a function of the accelerations of all involved bodies). N-E equations represent the different UAV and payload dynamics; aerodynamic drag and lifting conditions are considered during modeling. Catenary robots [79] offer a dynamic cable model representation. Planar modeling is followed considering cable assumptions (i.e., non-stretchable, mass-less) and constraints (i.e., cables that cannot have arbitrary angles, specific threshold for contact points). The N-E formulation describes the quadrotors’ and payload’s dynamics considering the forces and torques applied by the catenary robots to the box and the E-L for the transportation system. Additionally, the authors in [78] model the interactions between the payload and UAVs (re-configurable quadrotors) as influenced by the forces exerted by the cables using N-E and E-L methods. In [69], authors calculate the available wrench set on the cables’ tension in different cases (i.e., with or without external disturbance). They conclude that the outcomes are related to the minimum tension, acceleration of UAVs, maximum thrust of UAVs, external disturbance, and the configuration of tethers (i.e., significance on the robustness of payload transportation). The dynamics of the quadrotor and the payload (i.e., point mass) follow N-E formulation, while the equations of motion of the whole system are calculated using Udwadia–Kalaba equations for simulation purposes. When it comes to modeling vibrations of a flexible payload of a cooperative aerial system, [100,102] discuss Euler–Bernoulli and E-L methods including only transverse vibration and planar modeling.
6. Control
Cooperative control approaches in the field of UAVs involve a wide range of different strategies including communication, coordination, and decision-making among the agents and multiple drones working together in a coordinated manner to achieve complex tasks. One of the key aspects of cooperative control is the ability to handle inter-agent interactions that require the sharing state information. This might include formations in robotics swarms [123], synchronized localization [124], navigation [125], or object manipulation (i.e., cooperative aerial manipulation). Control and controller design for cooperative aerial manipulation could be studied from different perspectives. When aerial vehicles interact with the environment (i.e., payload manipulation), it is essential that they need to be able to control, at the same time, the position at the contact and the interaction force, preserving the stability of the entire system, as well as the precision. Therefore, the main approach lies in considering the cooperative manipulation task as a united system to be controlled.
6.1. Manipulation/Transportation
In respect to the task of manipulation/transportation of an object by a team of multirotors, various control strategies are employed and are presented in this subsection. The task is completed without external disturbances or perception techniques.
The control under linear–quadratic regulator (LQR) seems to handle deformation and vibrations of the payload regarding transportation/manipulation with flexible objects. To be specific, due to the deformation of the payload that alters the relative position and orientation of the quadrotors [101], the authors discuss LQR controller implementation, along with integral terms based on the linearized model. In [99], a continuous-time, infinite-horizon LQR controller is developed; each vehicle gives two scalar inputs (i.e., thrust force along z-axis, and a roll moment around x-axis). Moreover, in [102], collaborative control strategy comes to solve the under-actuation of the heterogeneous system (i.e., the flexible payload’s dynamic matrix has one rank input). The ground manipulator controller generates a slow yet fully-actuated trajectory as the fast under-actuated aerial robot’s control performs thrust aligning (i.e., orientation controller) and vibration suppression (i.e., LQR).
The geometric control approach is adopted for the cooperative transportation/manipulation between heterogeneous robots [103] and human–robot co-manipulation [110]. The entire system in [103] is controlled by an augmented non linear controller with a disturbance observer, although the aerial robot leverages a low-level geometric controller with an external wrench estimator and an admittance filter to manipulate the bar [107]. In addition, in [110], a geometric attitude controller tracks the desired orientation of the quadrotor while a human operator supplies the system with a force vector, maintaining both cable and payload in specific attitudes. Although the collaborative task was successful, the authors mention that a human-like controller could further enhance tracking performance. Two separate control units are exploited in [106]. The UGV steers the object to the desired position through PD control while the UAV adopts a cascaded control approach; inner loop for the attitude and outer loop for the inclination of the object. In [108] leader–follower MPCs are employed for the transportation task of the heterogeneous robots.
The category regarding cooperative transportation/manipulation with multi-DoF arms contemplates force distribution and compensation of internal forces by exploiting force control and applying admittance/impedance filters for managing external forces. Except for the low level PD control for tracking each quadcopters’ commands, the authors in [96] implement a decentralized adaptive controller that has no prior knowledge of the payload’s mass yet succeeds in estimating the total mass by employing a force consensus algorithm. The authors mention that the controller ensures equal mass distribution that leads to equal thrust between agents; increasing flight time. In [88], a hierarchical control framework was carried out in three layers; object behavior design, optimal cooperative force distribution, and admittance force control. Regarding the force control of aerial manipulators, the authors discuss a friction-cone constraint to maintain the contact with the grasp object. Moreover, model-based force control is presented in [97]. In the design, the payload stiffness is considered and assumptions regarding the rigid grip are relaxed. In [89], a control scheme consisting of two impedance filters (i.e., object level and internal) reduces contact (i.e., object/environment) and internal forces. In [87], a null-space-based behavioral (NSB) approach prioritizes tasks and achieves safe manipulation. Each multirotor is controlled by a robust controller (i.e., inner loop controller) with an extended high-gain and disturbance observer including arm dynamics. A reference velocity planner (i.e., outer loop controller) considers internal force and unilateral constraints in a NSB hierarchy. Path planning [91,93] and collision-free path planning [92,94] controllers are also demonstrated in this category. The works of [91,92,94] adopted augmented adaptive sliding mode controllers. In addition, the control design including a high level augmented adaptive sliding mode controller and a low level robust controller with disturbance observer is presented in [93]. A sliding mode controller is also applied in [95] by incorporating two estimation algorithms (i.e., relative distance estimation and dynamic parameter estimation).
In the previously published work of [111] regarding rigidly-attached multirotors, the authors discuss a two norm optimal control, partially decentralized. This implementation demonstrated successful results regarding grasping, stabilization, and three-dimensional trajectories. Pre-flight estimation of physical parameters of an unknown payload is addressed in [114]. The authors identify the optimal arrangement of the attachment positions on the payload, whereas the flight control itself is realized through a cascaded PID controller. For a more universal control system, a hierarchical controller and a modified control command allocation algorithm on each quadrotor is adopted [115]; effective for a team of quadrotors with different orientations. In [117], a dynamics-based control addresses joint limit constraints and thrust saturations as a constrained optimization problem. A decentralized autonomous smooth switching controller (ASSC) demonstrated robustness against robot failures [113].
Many previously published works develop geometric control for the cooperative transportation/manipulation task of cable-driven multirotors [73,74,75,76,77] demonstrating agile maneuvers. Admittance filters [67] also successfully preserve the stability of the transportation system by smoothing force signals. In addition, adaptive controllers seem to compensate for unknown parameters [79] and adverse conditions [81]. In [79], an adaptive controller overcomes the challenges of the box’s mass, inertia tensor, and contact points. By exploiting the sub-task coordination of the NSB controller (i.e., allowing simultaneous load tracking and optimizing quadrotors’ position), the authors in [83] employ a null-space-based adaptive control. The NSB controller ensures trajectory tracking, whereas adaptive controllers (for UAV and manipulator) in the inner loop consider dynamic uncertainties, interactive forces, and unknown load. Simple schemes, as demonstrated in [49,56], by exploiting PID in quasi-static motion and cascaded PID at reasonable speeds, respectively, showed an inability to damp out oscillations. In [60], an NMPC drives the object in a hierarchical way; the system explores secondary tasks such as inter-robot separation and obstacle avoidance in all six DoF. The authors address real-time computational requirements and less complexity by including only the payload pose in the state vector. However, force control is not so widely preferred in the cable-driven category, mainly because of the complexity and sensitivity involved in accurately measuring and regulating forces in systems with multiple cables. The main focus lies on the dynamic interactions between the system and its environment, rather than directly managing force outputs alone. Nevertheless, the authors of [86] propose a force coordination control scheme with disturbance separation and estimation, where a force-consensus term is introduced in order to average the load distribution between the quadrotors. The recent strategies employ backstepping [85] or anti-swing control [82]. The nonholonomic leader–follower system of [85] leverages backstepping control on the leader and a switching controller on the follower. The backstepping method consists of two controllers (i.e., the kinematics controller and the dynamics controller) and two UKF filters for force estimation. In [82], a nonlinear hierarchical controller incorporates two subsystems (i.e., inner, outer). In the outer loop, the authors considered the spatial swing angle between the quadrotor and the load. This strategy seems to increase the controller’s anti-swing performance. Many papers focus on motion planning under formation control. The load-leading collaborative scheme [68] employs a guidance control law that generates a common desired velocity for the quadrotors under a decentralized formation controller. Each quadrotor holds an internal feedback controller. In [71], an estimation-based formation control tracks the desired trajectories under tension disturbance. In [80], the combination of motion disagreements (i.e., no need for global positions) with an incremental nonlinear dynamic inversion controller (INDI), which particularly tracks acceleration signals, allows the accurate analysis of forces and accelerations of the system. The authors in [65] present a distributed trajectory optimization control with parallel computation on a decomposition scheme. The method still relies on a centralized approach.
6.2. In the Presence of Wind
Wind gusts and external disturbances are inevitable when experiments are held in outdoor conditions and can degrade the performance and precision of the transportation/manipulation task. However, the majority of previously published works in cooperative aerial manipulation and its individual categories, as described in Section 4, do not include experiments in the presence of wind (i.e., flexible payload, ground-air, multi-DoF arms categories). Nevertheless, experiments do exist in the rigidly attached and cable-driven categories.
Admittance controllers create a desired dynamic relationship between the position of the end-effector and the interaction force; the system is treated as mechanical impedance (i.e., input is the displacement of the end-effector, and output is the interaction force) [10]. In the presence of wind, the admittance control system successfully adjusts the interaction forces to counteract the disturbances caused by the wind. An admittance controller with force estimator is developed for the transportation task of rigidly attached quadrotors in the presence of wind [118]. In addition, a centralized finite state machine (FSM) coordinates the lifting and landing maneuver. When quadrotors reach the desired altitude, the admittance controller is engaged on every slave agent and allows an operator to control the master.
Cable-driven multirotors illustrated agility in windy conditions. Certain experiments demonstrated small external disturbances [54,70], artificial force [51], wind-like disturbances [81] (i.e., foam plates on drones to generate opposite drag forces), light breeze 7 km/h [62], or even wind gusts up to 14.4–21.6 km/h [63] and 10.8–25.2 km/h [72]. Hybrid strategies (sliding mode-adaptive PID) [54] or adaptive control [70] are particularly effective in conditions with environmental challenges. The distributed adaptive controller of [70] presented superior results to the nonlinear H∞ under disturbances and without considering payload dynamics. In [81], an inner–outer loop control scheme is adopted; a kinematic formation controller generates velocity reference while an adaptive dynamic compensator reduces the velocity-tracking error (i.e., produced from the system dynamics). Another approach to obtain robustness is the use of uncertainty-aware H∞ [51], which requires a minimum number of uncertain kinematic parameters and ensures stability though gain-tuning. Success in disturbance rejection is presented in passivity-based controllers [63,121]; system stability is achieved by maintaining a passive energy behavior. The control design in [121] eliminates the need for payload measurements or cable connections at the center of mass (COM). Additionally, the decentralized formation control strategy presented in [63], which includes internal feedback control and assumes communication between UAVs, has shown successful results when handling unknown payloads in unpredictable wind environments. The linear controller with a two-stage EKF-based estimator [61] succeeds in transporting and stabilizing the object under wind disturbances. The state of the payload was estimated through the cable tension, as obtained by the inertial sensor. Load-leading control also exhibits stable performance in the presence of light wind [62]; PID feedback controllers with acceleration feed-forward are implemented for both the payload and quadcopter. Strong winds during the experiment in [21] are compensated for by an orientation controller; the authors propose the use of force sensors in the ropes, enhancing robustness against variations in system parameters and disturbances. For the controller design in [69], a decentralized controller based on fixed-time extended state observer (ESO) is adopted, taking into account only the position and satisfying the desired figure-eight trajectory. To enhance the disturbance rejection ability, the authors in [72] presented a linear-model-based force control (i.e., backstepping and thrust direction controllers), along with force and torque disturbance observers; the system succeeds in compensating for the cable tension, strong winds, and unmodeled dynamics. In the same experiment, formation planning in obstacle environments using virtual structure is also demonstrated. In [64], model predictive control achieves a smooth performance after demonstrating outdoors and, at the same time, allowing agile maneuvers with high precision; less than 5 cm position accuracy.
6.3. Vision-Based
In the current literature, motion capture systems such as VICON and OptiTrack are usually employed to provide highly precise position and orientation information (i.e., state estimation). However, these sensors are used in indoor environments, and therefore, they could limit the application task. On the contrary, onboard visual sensors can provide the input for state estimation and object detection [90] or detect (not yet in the literature)/ track [59] the manipulated object.
Visual impedance control [109] demonstrated stability for the human–robot cotransportation task. Instead of measuring the velocities of both human and robot, a visual observer estimates the relative velocity between the two. The authors mention that directly measuring the human state could be challenging for real life applications (e.g., need for GPS/ motion capture systems). In [98], a leader–follower visual scheme performs transportation with two quadrotors equipped with dexterous robotic arms in gazebo environment. The authors mention that the controller was developed to acquire a more adaptive behavior by not directly avoiding compensation for disturbances. The adaptive controller in [90] estimates the mass and inertial properties of an unknown payload by exploiting an on-line estimator. Moreover, the onboard RGB-D camera allows the system to detect obstacles real-time. Non-linear control and inertial sensing are investigated for the transportation task of rigidly attached multirotors [112]. Pose estimation is obtained from visual–inertial odometry (VIO). This information is then sent to the controller in order to update the robots’ states using a linear measurement model. LQR control strategies demonstrate successful transportation without communication for cable-driven robots [57,58]; the follower tracks the leader after employing vision techniques from on-board sensing (i.e., tags on the leader). Likewise, in [59], markers attached on the payload contribute in perception and state estimation under a distributed vision-based control approach. Each quadrotor processes the information from the onboard sensor (i.e., VIO information) and estimates its cable direction and velocity in a distributed way. MPC [64] allows object detection and state estimation using on-board sensors.
6.4. Teleoperation
Teleoperation in cooperative aerial manipulation has potential towards safety as the human operator can directly control the manipulation task and, therefore, intervene if necessary. Bilateral teleoperation where skilled human operators generate the desired trajectory in a precise and safe way while being provided with force feedback to increase situational awareness is presented in rigidly attached [119] and ground–air [104] categories, either by conducting simulations or through laboratory experiments. However, as mentioned in [11], imperfect communication, time-varying delay, information losses, or possible destabilizing effects remain unexplored.
In [119], the teleoperation scheme incorporates a master–slave model (i.e., human–robots) where the human generates the desired trajectory through a haptic device. The trajectory is then sent to the object pose controller in order to compute the desired wrench. From there, a force allocation algorithm distributes the desired forces to each quadcopter CoMs and later is passed to the attitude-and-thrust controllers (one for each quadcopter). The human receives the inertia of the whole system as feedback and, through a repulsive viscoelastic virtual force, can have a realistic sense of the obstacles. Nevertheless, it has been tested only in simulation. A lab experiment with haptic feedback was employed in [104]; a centralized task planner commands decision making of the Tele-MAGMAS system. Reconfigurable multirotors [78] engage a dual space control approach with tension distribution. The method does not require the specification cable forces a priori; internal motion of the moving anchors is designed to keep the direction of the cables fixed with respect to the payload (i.e., facilitating teleoperation).
7. Conclusions and Discussion
This survey summarizes the published research in cooperative aerial manipulation focusing on the last decade’s publications. Cooperative aerial manipulation is a challenging research and development area, and the research findings and results are very promising. However, the overall cooperative aerial manipulation system is nonlinear with complex and coupled dynamics. A robust controller design is challenging; efficient navigation, accurate manipulation, and gripper (grasping) capabilities are also essential issues that need to be addressed, tackled, and overcome.
Table 3, summarizes the previously published research that was discussed in this survey. Focusing on real-time implementation, one can see that most prototypes have been tested mainly in indoor/lab environments where wind disturbance (which may affect the system’s performance dramatically) is not accounted for, thus, simplifying implementation considerably. In most of the reviewed research, a motion-capture system is used for state estimation. Although outdoor demonstrations do exist, mainly in cable-driven systems, there is still a gap until such systems can eventually successfully execute a real-life scenario. Additionally, industrial/construction applications require heavier and more complicated load structures; in published work that uses rods or boxes, the heavier load is 4 kg.
Several different platforms (i.e., quadrotors, hexarotors, octarotors, etc.) with different configurations (i.e., 2-DoF arms, rigid extensions, grippers, etc.) are employed for different manipulation/transportation tasks. Multirotors appear to offer versatile solutions, having advantages such as high speed, stability, and robustness against adverse environments. An additional advantage is their potential for increased flight time leveraging additive power sources, whereas their stability remains intact in the event of rotor failure, ensuring system integrity. A trend gaining traction in the literature is the adoption of tilted propeller actuation, recognized for its suitability in physical interaction tasks (e.g., maintenance, inspection tasks), close-to-real-life scenario experiments [13,104], and resilience against external disturbances without necessitating orientation adjustments.
Table 2 showcases the dominant modeling approaches. Specifically, within the category of multi-DoF robotic arms, the E-L formulation accurately represents these intricate systems, as evidenced by laboratory experiments. This formulation also effectively captures the dynamic characteristics and behaviors of ground–air systems, as validated by practical experiments. Conversely, for rigidly-attached multirotors, the N-E formulation is favored, with its effectiveness demonstrated through experimentation.
Inspired by [81], Table 4 presents the state-of-the-art control approaches in cooperative aerial manipulation categories. The introduced methods depend on the most recent experiment in each category. A comparison is held between the most important features of the controller performance. Emphasis is placed on payload tracking precision (indicated as low when the position error is more than 10 cm, medium when it is between 5 cm and 10 cm, and high when it is less than 5 cm). Low payload tracking precision may be caused due to lack of available data for full pose information, or measurements from the payload that are not included in the controller design, or due to lack of available sensory data related to the payload. Uncertainties that need to be considered include: model uncertainties; environmental disturbances; hardware issues; sensor noise; payload variability; and communications delays. Velocities and accelerations are showcasing the lack of experimental validation at speeds suitable for real-world applications; most of them either quasi static (QS) or low speed, simplifying control and observation of the system (i.e., dynamic effects negligible). Implementation complexity depends on the overall control architecture and followed methodology and refers to the level of intricacy involved in translating a theoretical control algorithm or strategy into a real-world implementation by employing straightforward tasks. The factors taken into account for classifying each cited work in Table 4 include architecture complexity (scheme, state estimation techniques, sensor fusion), required computational resources (on-line optimization), robustness to disturbances (online adaptation), and scalability (deployment scenarios). The simulation studies and comparisons are not included in the table due to the focus on real-time implementable tasks. There exist advantages and limitations in each summarized method. For example, velocities and accelerations far from quasi static (QS) motion follow low payload tracking precision. However, they have been demonstrated in 3D trajectories. High payload tracking experiments seem to tackle high implementation complexity. Additionally, one can see that recent control methods include the ability to suppress uncertainties and disturbances (like wind) while keeping complexity low.
Future Challenges
A challenging and still open research topic is investigating the combined data-driven and model-based, as well as learning-based, controller designs that consider trade offs between implementation simplicity and precision and also consider computational complexity [11]. In addition, controller designs are needed that overcome challenges such as wind disturbances, normal speed, and full pose manipulation. For implementation and testing of real-life scenarios, it is important to consider simplified assumptions, particularly when dealing with unknown values of a subset of system parameters. Regarding autonomy, onboard maps for navigating in unknown environments incur significant computational costs, yet they remains essential to facilitate adaptation capabilities when it comes to external disturbances.
Prototypes found in the literature introduce quadrotors as the primary UAV platform for aerial manipulation, as quadrotors offer hardware simplicity. Nevertheless, when dealing with construction tasks that demand high autonomy, payload capacity, and increased flight time, their applicability is limited. Hyper-redundant dual arms are desirable but rarely used; they offer benefits like enhanced lifting capabilities and the ability to perform complex tasks within a larger workspace. However, such redundancy has challenges due to added weights, potentially impacting autonomy.
Although indoor and outdoor experiments do exist, most experiments still rely on external motion capture systems, prompting the need for future advances in perception and on-board processing. Safety is a notable constraint, frequently disregarded in the existing literature. While effective obstacle avoidance in unknown environments has been showcased, the realm of cooperative aerial manipulation presents additional complexities, especially regarding potential human interaction. This underscores the importance of cautious consideration in future endeavors.
In conclusion, the published literature reveals that despite notable progress in recent times, the development of a fully operational cooperative aerial manipulation system that is simultaneously safe, responsive, accurate, and capable of autonomous navigation solely through on-board visual sensors and local communication links (between neighbor robots) remains a challenge. The system requirements delineate a highly promising yet formidable research domain within aerial robotics. A plethora of complex research challenges persists, necessitating resolution before such systems can achieve practical relevance and deployment in real-world scenarios, especially those demanding hard real-time capabilities.
Author Contributions
All authors contributed to the study conception and design. Material preparation, data collection, and analysis were performed by S.C.B., C.S.T. and K.P.V. The first draft of the manuscript was written by S.C.B., and all authors commented on previous versions of the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
The work in this paper has been supported by Special Account for Research Funding (E.L.K.E.) of National Technical University of Athens (N.T.U.A.).
Data Availability Statement
Not applicable.
Acknowledgments
This article showcases the extended version of our previously published work “Real-Time Applicable Cooperative Aerial Manipulation: A Survey” (https://ieeexplore.ieee.org/document/10155960, accessed on 26 June 2023) which was presented at the 2023 International Conference on Unmanned Aircraft Systems (ICUAS).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Wu, Y.; Wu, S.; Hu, X. Multi-constrained cooperative path planning of multiple drones for persistent surveillance in urban environments. Complex Intell. Syst. 2021, 7, 1633–1647. [Google Scholar] [CrossRef]
- Almurib, H.; Nathan, P.; Kumar, T. Control and path planning of quadrotor aerial vehicles for search and rescue. In Proceedings of the SICE Annual Conference 2011, Tokyo, Japan, 13–18 September 2011; pp. 700–705. Available online: https://ieeexplore.ieee.org/abstract/document/6060754 (accessed on 27 October 2011).
- Reinoso, J.F.; Gonçalves, J.E.; Pereira, C.; Bleninger, T. Cartography for Civil Engineering Projects: Photogrammetry Supported by Unmanned Aerial Vehicles. Iran. J. Sci. Technol. Trans. Civ. Eng. 2018, 42, 91–96. [Google Scholar] [CrossRef]
- Hu, J.; Niu, H.; Carrasco, J.; Lennox, B.; Arvin, F. Fault-tolerant cooperative navigation of networked UAV swarms for forest fire monitoring. Aerosp. Sci. Technol. 2022, 123, 107494. [Google Scholar] [CrossRef]
- Yuan, W.; Choi, D.; Bolkas, D. GNSS-IMU-assisted colored ICP for UAV-LiDAR point cloud registration of peach trees. Comput. Electron. Agric. 2022, 197, 106966. [Google Scholar] [CrossRef]
- Kim, J.J.; Kim, I.; Hwang, J. A change of perceived innovativeness for contactless food delivery services using drones after the outbreak of COVID-19. Int. J. Hosp. Manag. 2021, 93. [Google Scholar] [CrossRef]
- Ruggiero, F.; Lippiello, V.; Ollero, A. Aerial Manipulation: A Literature Review. IEEE Robot. Autom. Lett. 2018, 3, 1957–1964. [Google Scholar] [CrossRef]
- Aerial Robotics Cooperative Assembly System. EU Res. 2011–2015. Available online: https://cordis.europa.eu/project/id/287617 (accessed on 22 April 2017).
- Lindsey, Q.; Mellinger, D.; Kumar, V. Construction with quadrotor teams. Auton. Robot. 2012, 33, 323–336. [Google Scholar] [CrossRef]
- Ollero, A.; Tognon, M.; Suarez, A.; Lee, D.; Franchi, A. Past, Present and Future of Aerial Robotic Manipulators. IEEE Trans. Robot. 2021, 38, 626–645. Available online: https://ieeexplore.ieee.org/document/9462539 (accessed on 22 June 2021). [CrossRef]
- Khamseh, H.B.; Janabi-Sharifi, F.; Abdessameud, A. Aerial manipulation-A literature survey. Robot. Auton. Syst. 2018, 107, 221–235. [Google Scholar] [CrossRef]
- Ramalepa, L.P.; Jamisola, R.S., Jr. A Review on Cooperative Robotic Arms with Mobile or Drones Bases. Int. J. Autom. Comput. 2021, 18, 536–555. [Google Scholar] [CrossRef]
- Ollero, A.; Heredia, G.; Franchi, A.; Antonelli, G.; Kondak, K.; Sanfeliu, A.; Viguria, A.; de Dios, J.M.; Pierri, F.; Cortés, J.; et al. The aeroarms project: Aerial robots with advanced manipulation capabilities for inspection and maintenance. IEEE Robot. Autom. Mag. 2018, 25, 12–13. Available online: https://ieeexplore.ieee.org/document/8435987 (accessed on 14 August 2018). [CrossRef]
- Barakou, S.C.; Tzafestas, C.S.; Valavanis, K.P. Real-Time Applicable Cooperative Aerial Manipulation: A Survey. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Warsaw, Poland, 6–9 June 2023; pp. 634–643. [Google Scholar] [CrossRef]
- Ángel Trujillo, M.; de Dios, J.R.M.; Martín, C.; Viguria, A.; Ollero, A. Novel Aerial Manipulator for Accurate and Robust Industrial NDT Contact Inspection: A New Tool for the Oil and Gas Inspection Industry. Sensors 2019, 19, 1305. [Google Scholar] [CrossRef] [PubMed]
- Albers, A.; Trautmann, S.; Howard, T.; Nguyen, T.A.; Frietsch, M.; Sauter, C. Semi-autonomous flying robot for physical interaction with environment. In Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics, Singapore, 28–30 June 2010; pp. 441–446. Available online: https://ieeexplore.ieee.org/document/5513152 (accessed on 19 July 2010).
- Mellinger, D.; Lindsey, Q.; Shomin, M.; Kumar, V. Design, modeling, estimation and control for aerial grasping and manipulation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 2668–2673. Available online: https://ieeexplore.ieee.org/document/6094871 (accessed on 5 December 2011).
- Fumagalli, M.; Naldi, R.; Macchellia, A.; Forte, F.; Keemink, A.Q.; Stramigioli, S.; Carloni, R.; Marconi, L. Developing an Aerial Manipulator Prototype: Physical Interaction with the Environment. IEEE Robot. Autom. Mag. 2014, 21, 41–50. Available online: https://ieeexplore.ieee.org/document/6875943 (accessed on 11 August 2014). [CrossRef]
- Marconi, L.; Naldi, R.; Gentili, L. Modelling and control of a flying robot interacting with the environment. Automatica 2011, 47, 2571–2583. [Google Scholar] [CrossRef]
- Korpela, C.M.; Danko, T.W.; Oh, P.Y. MM-UAV: Mobile Manipulating Unmanned Aerial Vehicle. J. Intell. Robot. Syst. 2012, 65, 93–101. [Google Scholar] [CrossRef]
- Bernard, M.; Kondak, K.; Maza, I.; Ollero, A. Autonomous Transportation and Deployment with Aerial Robots for Search and Rescue Missions. J. Field Robot. 2011, 28, 914–931. [Google Scholar] [CrossRef]
- Pounds, P.; Bersak, D.; Dollar, A. Grasping From the Air: Hovering Capture and Load Stability. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2491–2498. Available online: https://ieeexplore.ieee.org/document/5980314 (accessed on 18 August 2011).
- Morton, K.; Toro, L.F.G. Development of a Robust Framework for an Outdoor Mobile Manipulation UAV. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–8. Available online: https://ieeexplore.ieee.org/document/7500576 (accessed on 30 June 2016).
- Jimenez-Cano, A.E.; Martin, J.; Heredia, G.; Ollero, A.; Cano, R. Control of an aerial robot with multi-link arm for assembly tasks. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 4916–4921. Available online: https://ieeexplore.ieee.org/document/6631279 (accessed on 17 October 2013).
- Kondak, K.; Huber, F.; Schwarzbach, M.; Laiacker, M.; Sommer, D.; Bejar, M.; Ollero, A. Aerial manipulation robot composed of an autonomous helicopter and a 7 degrees of freedom industrial manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2107–2112. Available online: https://ieeexplore.ieee.org/document/6907148 (accessed on 29 September 2014).
- Danko, T.W.; Oh, P.Y. A hyper-redundant manipulator for mobile manipulating unmanned aerial vehicles. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 974–981. Available online: https://ieeexplore.ieee.org/document/6564784 (accessed on 22 July 2013).
- Lippiello, V.; Cacace, J.; Santamaria-Navarro, A.; Andrade-Cetto, J.; Ángel Trujillo, M.; Esteves, Y.R.; Viguria, A. Hybrid Visual Servoing with Hierarchical Task Composition for Aerial Manipulation. IEEE Robot. Autom. Lett. 2016, 1, 259–266. Available online: https://ieeexplore.ieee.org/document/7361979 (accessed on 22 December 2015). [CrossRef]
- Kanellakis, C.; Terreran, M.; Kominiak, D.; Nikolakopoulos, G. On Vision Enabled Aerial Manipulation for Multirotors. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; pp. 1–7. Available online: https://ieeexplore.ieee.org/document/8247653 (accessed on 8 January 2018).
- Danko, T.W.; Chaney, K.P.; Oh, P.Y. A Parallel Manipulator for Mobile Manipulating UAVs. In Proceedings of the IEEE International Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 11–12 May 2015; pp. 1–6. Available online: https://ieeexplore.ieee.org/document/7219682 (accessed on 27 August 2015).
- Kamel, M.; Alexis, K.; Siegwart, R. Design and Modeling of Dexterous Aerial Manipulator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 4870–4876. Available online: https://ieeexplore.ieee.org/document/7759715 (accessed on 1 December 2016).
- Pumarola, A.; Vakhitov, A.; Agudo, A.; Moreno-Noguer, F.; Sanfeliu, A. Relative Localization for Aerial Manipulation with PL-SLAM. In Aerial Robotic Manipulation; Springer: Berlin/Heidelberg, Germany, 2019; pp. 239–248. [Google Scholar] [CrossRef]
- Paneque, J.; de Dios, J.M.; Ollero, A. Multi-Sensor 6-DoF Localization for Aerial Robots In Complex GNSS-Denied Environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1978–1984. Available online: https://ieeexplore.ieee.org/document/8967686 (accessed on 28 January 2020).
- Zhang, X.; Zhang, Y.; Liu, P.; Zhao, S. Robust Localization of Occluded Targets in Aerial Manipulation Via Range-Only Mapping. IEEE Robot. Autom. 2022, 27, 2921–2928. Available online: https://ieeexplore.ieee.org/document/9691791 (accessed on 25 January 2022). [CrossRef]
- Bodie, K.; Brunner, M.; Pantic, M.; Walser, S.; Pfändler, P.; Angst, U.; Siegwart, R.; Nieto, J. Active Interaction Force Control for Contact-Based Inspection with a Fully Actuated Aerial Vehicle. IEEE Trans. Robot. 2021, 37, 709–722. Available online: https://ieeexplore.ieee.org/document/9295362 (accessed on 15 December 2020). [CrossRef]
- Ryll, M.; Muscio, G.; Pierri, F.; Cataldi, E.; Antonelli, G.; Caccavale, F.; Bicego, D.; Franchi, A. 6D interaction control with aerial robots: The flying end-effector paradigm. Int. J. Robot. Res. 2019, 38, 1045–1062. [Google Scholar] [CrossRef]
- Tognon, M.; Chávez, H.A.T.; Gasparin, E.; Sablé, Q.; Bicego, D.; Mallet, A.; Lany, M.; Santi, G.; Revaz, B.; Cortés, J.; et al. A Truly-Redundant Aerial Manipulator System with Application to Push-and-Slide Inspection in Industrial Plants. IEEE Robot. Autom. 2019, 4, 1045–1062. Available online: https://ieeexplore.ieee.org/document/8629273 (accessed on 29 January 2019). [CrossRef]
- Santamaria-Navarro, A.; Grosch, P.; Lippiello, V.; Solà, J.; Andrade-Cetto, J. Uncalibrated Visual Servo for Unmanned Aerial Manipulation. IEEE/ASME Trans. Mechatronics 2017, 22, 1610–1621. Available online: https://ieeexplore.ieee.org/document/7879365 (accessed on 15 March 2017). [CrossRef]
- Suarez, A.; Salmoral, R.; Garofano-Soldado, A.; Heredia, G.; Ollero, A. Aerial Device Delivery for Power Line Inspection and Maintenance. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 30–38. Available online: https://ieeexplore.ieee.org/document/9836039 (accessed on 26 July 2022).
- Suarez, A.; Heredia, G.; Ollero, A. Design of an anthropomorphic, compliant, and lightweight dual arm for aerial manipulation. IEEE Access 2018, 6, 29173–29189. Available online: https://ieeexplore.ieee.org/document/8354886 (accessed on 4 May 2018). [CrossRef]
- Paul, H.; Miyazaki, R.; Ladig, R.; Shimonomura, K. Landing of a multirotor aerial vehicle on an uneven surface using multiple on-board manipulators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1926–1933. Available online: https://ieeexplore.ieee.org/document/8968529 (accessed on 28 January 2020).
- Anzai, T.; Zhao, M.; Chen, X.; Shi, F.; Kawasaki, K.; Okada, K.; Inaba, M. Multilinked multirotor with internal communication system for multiple objects transportation based on form optimization method. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5977–5984. Available online: https://ieeexplore.ieee.org/document/8206493 (accessed on 14 December 2017).
- Gabrich, B.; Saldana, D.; Kumar, V.; Yim, M. A Flying Gripper Based on Cuboid Modular Robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 7024–7030. Available online: https://ieeexplore.ieee.org/document/8460682 (accessed on 13 September 2018).
- Zhao, M.; Shi, F.; Anzai, T.; Okada, K.; Inaba, M. Online Motion Planning for Deforming Maneuvering and Manipulation by Multilinked Aerial Robot Based on Differential Kinematics. IEEE Robot. Autom. 2020, 5, 1602–1609. Available online: https://ieeexplore.ieee.org/document/8962166 (accessed on 17 January 2020). [CrossRef]
- Yang, H.; Park, S.; Lee, J.; Ahn, J.; Son, D.; Lee, D. LASDRA: Large-Size Aerial Skeleton System with Distributed Rotor Actuation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 7017–7023. Available online: https://ieeexplore.ieee.org/document/8460713 (accessed on 13 September 2018).
- Gioioso, G.; Mohammadi, M.; Franchi, A.; Prattichizzo, D. A Force-based Bilateral Teleoperation Framework for Aerial Robots in Contact with the Environment. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 318–324. Available online: https://ieeexplore.ieee.org/abstract/document/7139018 (accessed on 2 July 2015).
- Gioioso, G.; Franchi, A.; Salvietti, G.; Scheggi, S.; Prattichizzo, D. The Flying Hand: A Formation of UAVs for Cooperative Aerial Tele-Manipulation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 4335–4341. Available online: https://ieeexplore.ieee.org/document/6907490 (accessed on 29 September 2014).
- Lee, J.; Balachandran, R.; Sarkisov, Y.S.; Stefano, M.D.; Coelho, A.; Shinde, K.; Kim, M.J.; Triebel, R.; Kondak, K. Visual-Inertial Telepresence for Aerial Manipulation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1222–1229. Available online: https://ieeexplore.ieee.org/document/9197394 (accessed on 15 September 2020).
- Sarkisov, Y.S.; Kim, M.J.; Bicego, D.; Tsetserukou, D.; Ott, C.; Franchi, A.; Kondak, K. Development of SAM: Cable-suspended aerial manipulator. In Proceedings of the International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5323–5329. Available online: https://ieeexplore.ieee.org/document/8793592 (accessed on 12 August 2019).
- Michael, N.; Fink, J.; Kumar, V. Cooperative manipulation and transportation with aerial robots. Auton. Robot. 2010, 30, 73–86. [Google Scholar] [CrossRef]
- Fink, J.; Michael, N.; Kim, S.; Kumar, V. Planning and control for cooperative manipulation and transportation with aerial robots. Int. J. Robot. Res. 2011, 30, 324–334. [Google Scholar] [CrossRef] [PubMed]
- Sanalitro, D.; Savino, H.J.; Tognon, M.; Cortés, J.; Franchi, A. Full-Pose Manipulation Control of a Cable-Suspended Load with Multiple UAVs under Uncertainties. IEEE Robot. Autom. 2020, 5, 2185–2191. Available online: https://ieeexplore.ieee.org/document/8972607 (accessed on 28 January 2020). [CrossRef]
- Sreenath, K.; Kumar, V. Dynamics, Control and Planning for Cooperative Manipulation of Payloads Suspended by Cables from Multiple Quadrotor Robots. Robot. Sci. Syst. 2013. [Google Scholar] [CrossRef]
- Bernard, M.; Kondak, K.; Hommel, G. Load transportation system based on autonomous small size helicopters. Aeronaut. J. 2010, 114, 191–198. [Google Scholar] [CrossRef]
- Paola, V.D.; Goldsztejn, A.; Zoppi, M.; Caro, S. Design of a Sliding Mode-Adaptive PID Control for Aerial Systems with a Suspended Load Exposed to Wind Gusts. J. Comput. Nonlinear Dyn. 2023, 18, 1–15. [Google Scholar] [CrossRef]
- Mechali, O.; Xu, L.; Xie, X. Formation Flight Control of Networked-Delayed Quadrotors for Cooperative Slung Load Transportation. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Guilin, China, 7–10 August 2022; pp. 526–531. Available online: https://ieeexplore.ieee.org/document/9856271 (accessed on 22 August 2022).
- Bulka, E.; He, C.; Wehbeh, J.; Sharf, I. Experiments on Collaborative Transport of Cable-suspended Payload with Quadrotor UAVs. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS 22), Dubrovnik, Croatia, 21–24 June 2022; pp. 1465–1473. Available online: https://ieeexplore.ieee.org/document/9836163 (accessed on 26 July 2022).
- Michael Gassner, T.C.; Scaramuzza, D. Dynamic Collaboration without Communication: Vision-Based Cable-Suspended Load Transport with Two Quadrotors. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5196–5202. Available online: https://ieeexplore.ieee.org/document/7989609 (accessed on 24 July 2017).
- Bacelara, T.; Madeirasa, J.; Melicioa, R.; Cardeiraa, C.; Oliveiraa, P. On-board implementation and experimental validation of collaborative transportation of loads with multiple UAVs. Aerosp. Sci. Technol. 2020, 107, 106284. [Google Scholar] [CrossRef]
- Li, G.; Ge, R.; Loianno, G. Cooperative Transportation of Cable Suspended Payloads with MAVs Using Monocular Vision and Inertial Sensing. IEEE Robot. Autom. 2021, 6, 5316–5323. Available online: https://ieeexplore.ieee.org/abstract/document/9376103 (accessed on 11 March 2021). [CrossRef]
- Li, G.; Loianno, G. Nonlinear Model Predictive Control for Cooperative Transportation and Manipulation of Cable Suspended Payloads with Multiple Quadrotors. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 5034–5041. Available online: https://ieeexplore.ieee.org/document/10341785 (accessed on 13 December 2023).
- Xie, H.; Dong, K.; Chirarattananon, P. Cooperative Transport of a Suspended Payload via Two Aerial Robots with Inertial Sensing. IEEE Access 2022, 10, 81764–81776. Available online: https://ieeexplore.ieee.org/document/9844732 (accessed on 29 July 2022). [CrossRef]
- Geng, J.; Langelaan, J.W. Cooperative Transport of a Slung Load Using Load-Leading Control. J. Guid. Control. Dyn. 2020, 43, 1313–1331. [Google Scholar] [CrossRef]
- Klausen, K.; Meissen, C.; Fossen, T.I.; Arcak, M.; Johansen, T.A. Cooperative Control for Multirotors Transporting an Unknown Suspended Load Under Environmental Disturbances. IEEE Trans. Control. Syst. Technol. 2018, 28, 653–660. Available online: https://ieeexplore.ieee.org/document/8567931 (accessed on 7 December 2018). [CrossRef]
- Spurny, V.; Petrlik, M.; Vonasek, V.; Saska, M. Cooperative Transport of Large Objects by a Pair of Unmanned Aerial Systems using Sampling-based Motion Planning. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Zaragoza, Spain, 10–13 September 2019; pp. 955–962. Available online: https://ieeexplore.ieee.org/document/8869298 (accessed on 17 October 2019).
- Jackson, B.E.; Howell, T.A.; Shah, K.; Schwager, M.; Manchester, Z. Scalable Cooperative Transport of Cable-Suspended Loads with UAVs Using Distributed Trajectory Optimization. IEEE Robot. Autom. 2020, 5, 3368–3374. Available online: https://ieeexplore.ieee.org/document/9007450 (accessed on 24 February 2020). [CrossRef]
- Jiang, Q.; Kumar, V. The Inverse Kinematics of Cooperative Transport with Multiple Aerial Robots. IEEE Trans. Robot. 2013, 29, 136–145. Available online: https://ieeexplore.ieee.org/document/6329450 (accessed on 11 October 2012). [CrossRef]
- Tognon, M.; Gabellieri, C.; Pallottino, L.; Franchi, A. Aerial Co-Manipulation with Cables: The Role of Internal Force for Equilibria, Stability, and Passivity. IEEE Robot. Autom. 2018, 3, 2577–2583. Available online: https://ieeexplore.ieee.org/document/8286868 (accessed on 8 February 2018). [CrossRef]
- Ping, Y.; Wang, M.; Qi, J.; Wu, C.; Guo, J. Collaborative Control Based on Payload-leading for the Multi-quadrotor Transportation Systems. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2023), London, UK, 29 May–2 June 2023; pp. 5304–5309. Available online: https://ieeexplore.ieee.org/document/10161414 (accessed on 4 July 2023).
- Liu, Y.; Zhang, F.; Huang, P.; Zhang, X. Analysis, planning and control for cooperative transportation of tethered multi-rotor UAVs. Aerosp. Sci. Technol. 2021, 113. [Google Scholar] [CrossRef]
- Arab, F.; Shirazi, F.A.; Reza, M.; Yazdi, H. Planning and distributed control for cooperative transportation of a non-uniform slung-load by multiple quadrotors. Aerosp. Sci. Technol. 2021, 117, 106917. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, F.; Huang, P. Formation Planning for Tethered Multirotor UAV Cooperative Transportation with Unknown Payload and Cable Length. In IEEE Transactions on Automation Science and Engineering; IEEE: Piscataway, NJ, USA, 2023; pp. 1–12. Available online: https://ieeexplore.ieee.org/document/10144367 (accessed on 5 June 2023).
- Han, X.; Miyazaki, R.; Gao, T.; Tomita, K.; Kamimura, A. Controller Design and Disturbance Rejection of Multi-Quadcopters for Cable Suspended Payload Transportation Using Virtual Structure. IEEE Access 2022, 10, 122197–122210. Available online: https://ieeexplore.ieee.org/document/9950250 (accessed on 14 November 2022). [CrossRef]
- Lee, T.; Sreenath, K.; Kumar, V. Geometric Control of Cooperating Multiple Quadrotor UAVs with a Suspended Payload. In Proceedings of the IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; pp. 5510–5515. Available online: https://ieeexplore.ieee.org/document/6760757 (accessed on 10 March 2014).
- Lee, T. Geometric Control of Quadrotor UAVs Transporting a Cable-Suspended Rigid Body. IEEE Trans. Control. Syst. Technol. 2017, 26, 255–264. Available online: https://ieeexplore.ieee.org/document/7843619 (accessed on 6 February 2017). [CrossRef]
- Goodarzi, F.A.; Lee, T. Dynamics and Control of Quadrotor UAVs Transporting a Rigid Body Connected via Flexible Cables. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 4677–4682. Available online: https://ieeexplore.ieee.org/document/7172066 (accessed on 30 July 2015).
- Goodarzi, F.A.; Lee, T. Stabilization of a Rigid Body Payload with Multiple Cooperative Quadrotors. J. Dyn. Syst. Meas. Control. 2015, 138, 121001. [Google Scholar] [CrossRef]
- Sharma, M.; Sundaram, S. A geometric control approach for multi-UAV cooperative payload transfer. Nonlinear Dyn. 2023, 111, 10077–10096. [Google Scholar] [CrossRef]
- Masone, C.; Bülthoff, H.H.; Stegagno, P. Cooperative Transportation of a Payload using Quadrotors: A Reconfigurable Cable-Driven Parallel Robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea (South), 9–14 October 2016; pp. 1623–1630. Available online: https://ieeexplore.ieee.org/document/7759262 (accessed on 1 December 2016).
- Cardona, G.A.; D’Antonio, D.S.; Fierro, R.; Saldana, D. Adaptive Control for Cooperative Aerial Transportation Using Catenary Robots. In Proceedings of the Aerial Robotic Systems Physically Interacting with the Environment (AIRPHARO), Biograd na Moru, Croatia, 4–5 October 2021; Available online: https://ieeexplore.ieee.org/document/9571068 (accessed on 26 October 2021).
- de Marina, H.G.; Smeur, E. Flexible collaborative transportation by a team of rotorcraft. In Proceedings of the International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1074–1080. Available online: https://ieeexplore.ieee.org/document/8794316 (accessed on 12 August 2019).
- Villa, D.K.D.; Brandão, A.S.; Carelli, R.; Sarcinelli-Filho, M. Cooperative Load Transportation with Two Quadrotors Using Adaptive Control. IEEE Access 2021, 9, 129148–129160. Available online: https://ieeexplore.ieee.org/document/9540662 (accessed on 16 September 2021). [CrossRef]
- Liang, X.; Zhang, Z.; Yu, H.; Wang, Y.; Fang, Y.; Han, J. Antiswing Control for Aerial Transportation of the Suspended Cargo by Dual Quadrotor UAVs. IEEE/ASME Trans. Mechatronics 2022, 27, 5159–5172. Available online: https://ieeexplore.ieee.org/document/9784110 (accessed on 27 May 2022). [CrossRef]
- Hung, T.K.; Liu, Y.C.; Lee, C.E. Null-Space-Based Adaptive Control for Aerial Manipulators on Cooperatively Transporting Cable-Suspended Objects. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Seattle, WA, USA, 28–30 June 2023; pp. 466–472. Available online: https://ieeexplore.ieee.org/document/10196282 (accessed on 2 August 2023).
- Zhang, X.; Yang, Q.; Yu, R.; Wu, D.; Wei, S.; Cui, J.; Fang, H. Design and Analysis of Truss Aerial Transportation System (TATS): The Lightweight Bar Spherical Joint Mechanism. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 10501–10507. Available online: https://ieeexplore.ieee.org/document/9981191 (accessed on 26 December 2022).
- Wu, P.X.; Yang, C.C.; Cheng, T.H. Cooperative Transportation of UAVs without Inter-UAV Communication. IEEE/ASME Trans. Mechatronics 2023, 28, 2340–2351. Available online: https://ieeexplore.ieee.org/document/10020177 (accessed on 18 January 2023). [CrossRef]
- Xu, L.; Lu, H.; Wang, J.; Guo, X.; Guo, L. Force-Coordination Control for Aerial Collaborative Transportation Based on Lumped Disturbance Separation and Estimation. 2023. Available online: https://arxiv.org/pdf/2304.00193.pdf (accessed on 1 April 2023).
- Kim, S.; Seo, H.; Shin, J.; Kim, H.J. Cooperative Aerial Manipulation Using Multirotors with Multi-DOF Robotic Arms. IEEE/ASME Trans. Mechatronics 2018, 23, 702–713. Available online: https://ieeexplore.ieee.org/document/8253830 (accessed on 11 January 2018). [CrossRef]
- Beard, R.W.; McLain, T.W.; Kingston, D.D.; Johanson, D. Hierarchical cooperative control framework of multiple quadrotor-manipulator systems. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4656–4662. Available online: https://ieeexplore.ieee.org/document/7139844 (accessed on 2 July 2015).
- Caccavale, F.; Giglio, G.; Muscio, G.; Pierri, F. Cooperative impedance control for multiple UAVs with a robotic arm. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 2366–2371. Available online: https://ieeexplore.ieee.org/document/7353697 (accessed on 17 December 2015).
- Lee, H.; Kim, H.; Kim, W.; Kim, H.J. An Integrated Framework for Cooperative Aerial Manipulators in Unknown Environments. IEEE Robot. Autom. Lett. 2018, 3, 2307–2314. Available online: https://ieeexplore.ieee.org/document/8294245 (accessed on 19 February 2018). [CrossRef]
- Lee, H.; Kim, H.; Kim, H.J. Path planning and control of multiple aerial manipulators for a cooperative transportation. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 2386–2391. Available online: https://ieeexplore.ieee.org/document/7353700 (accessed on 17 December 2015).
- Lee, H.; Kim, H.; Kim, H.J. Planning and Control for Collision-Free Cooperative Aerial Transportation. IEEE Trans. Autom. Sci. Eng. 2016, 15, 189–201. Available online: https://ieeexplore.ieee.org/document/7589023 (accessed on 12 October 2016). [CrossRef]
- Kim, H.; Seo, H.; Son, C.Y.; Lee, H.; Kim, S.; Kim, H.J. Cooperation in the Air: A Learning-Based Approach for the Efficient Motion Planning of Aerial Manipulators. IEEE Robot. Autom. Mag. 2018, 25, 76–85. Available online: https://ieeexplore.ieee.org/abstract/document/8485637 (accessed on 8 October 2018). [CrossRef]
- Lee, H.; Son, C.Y.; Kim, H.J. Collision-Free Path Planning for Cooperative Aerial Manipulators Under Velocity and Curvature Constraints. IEEE Access 2019, 7, 171153–171162. Available online: https://ieeexplore.ieee.org/document/8862842. (accessed on 8 October 2019). [CrossRef]
- Lee, H.; Kim, U. Estimation and Control of Cooperative Aerial Manipulators for a Payload with an Arbitrary Center-of-Mass. Sensors 2021, 21, 6452. Available online: https://www.mdpi.com/1424-8220/21/19/6452 (accessed on 27 September 2021). [CrossRef] [PubMed]
- Thapa, S.; Bai, H.; Acosta, J.A. Cooperative Aerial Manipulation with Decentralized Adaptive Force-Consensus Control. J. Intell. Robot. Syst. 2020, 97, 171–183. [Google Scholar] [CrossRef]
- Gkountas, K.; Tzes, A. Leader/Follower Force Control of Aerial Manipulators. IEEE Access 2021, 9, 17584–17595. Available online: https://ieeexplore.ieee.org/document/9333576 (accessed on 22 January 2021). [CrossRef]
- Chaikalis, D.; Evangeliou, N.; Tzes, A.; Khorrami, F. Decentralized Leader-Follower Visual Cooperative Package Transportation using Unmanned Aerial Manipulators. In Proceedings of the European Control Conference (ECC), Bucharest, Romania, 13–16 June 2023; pp. 1–5. Available online: https://ieeexplore.ieee.org/document/10178351 (accessed on 17 July 2023).
- Ritz, R.; D’Andrea, R. Carrying a Flexible Payload with Multiple Flying Vehicles. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 3465–3471. Available online: https://ieeexplore.ieee.org/document/6696850 (accessed on 2 January 2014).
- Yang, H.; Kim, M.S.; Lee, D. Distributed Rotor-Based Vibration Suppression for Flexible Object Transport and Manipulation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1230–1236. Available online: https://ieeexplore.ieee.org/document/9196908 (accessed on 15 September 2020).
- Chen, T.; Shan, J.; Liu, H.H.T. Cooperative Transportation of a Flexible Payload Using Two Quadrotors. J. Guid. Control. Dyn. 2021, 44, 2099–2107. [Google Scholar] [CrossRef]
- Yang, H.; Staub, N.; Franchi, A.; Lee, D.J. Modeling and Control of Multiple Aerial-Ground Manipulator System (MAGMaS) with Load Flexibility. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4840–4847. Available online: https://ieeexplore.ieee.org/document/8593834 (accessed on 6 January 2019).
- Staub, N.; Mohammadi, M.; Bicego, D.; Prattichizzo, D.; Franchi, A. Towards Robotic MAGMaS: Multiple Aerial-Ground Manipulator Systems. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 1307–1312. Available online: https://ieeexplore.ieee.org/document/7989154 (accessed on 24 July 2017).
- Staub, N. The tele-MAGMaS: An aerial-ground comanipulator system. IEEE Robot. Autom. Mag. 2018, 25, 66–75. Available online: https://ieeexplore.ieee.org/document/8511046 (accessed on 26 October 2018). [CrossRef]
- Kotaru, P.; Sreenath, K. Multiple Quadrotors Carrying a Flexible Hose: Dynamics, Differential Flatness and Control. IFAC-PapersOnLine 2020, 53, 8832–8839. [Google Scholar] [CrossRef]
- Nguyen, T.W.; Catoire, L.; Garone, E. Control of a quadrotor and a ground vehicle manipulating an object. Automatica 2019, 105, 384–390. [Google Scholar] [CrossRef]
- Staub, N.; Bicego, D.; Sablé, Q.; Arellano-Quintana, V.; Mishra, S.; Franchi, A. Towards a flying assistant paradigm: The OTHex. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 6997–7002. Available online: https://ieeexplore.ieee.org/abstract/document/8460877 (accessed on 13 September 2018).
- Lissandrini, N.; Verginis, C.K.; Roque, P.; Cenedese, A.; Dimarogonas, D.V. Decentralized Nonlinear MPC for Robust Cooperative Manipulation by Heterogeneous Aerial-Ground Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 1531–1536. Available online: https://ieeexplore.ieee.org/document/9341023 (accessed on 10 February 2021).
- Xu, M.; Hu, A.; Wang, H. Visual-Impedance-Based Human–Robot Cotransportation with a Tethered Aerial Vehicle. IEEE Trans. Ind. Inform. 2023, 19, 10356–10365. Available online: https://ieeexplore.ieee.org/document/10032095 (accessed on 30 January 2023). [CrossRef]
- Prajapati, P.; Vashista, V. Aerial Physical Human Robot Interaction for Payload Transportation. IEEE Robot. Autom. Lett. 2023, 8, 2377–3766. Available online: https://ieeexplore.ieee.org/document/10168218 (accessed on 29 June 2023). [CrossRef]
- Mellinger, D.; Shomin, M.; Michael, N.; Kumar, V. Cooperative Grasping and Transport Using Multiple Quadrotors. Distrib. Auton. Robot. Syst. 2013, 83, 545–558. [Google Scholar] [CrossRef] [PubMed]
- Loianno, G.; Kumar, V. Cooperative Transportation using Small Quadrotors using Monocular Vision and Inertial Sensing. IEEE Robot. Autom. 2017, 3, 680–687. Available online: https://ieeexplore.ieee.org/document/8120115 (accessed on 27 November 2017). [CrossRef]
- Oishi, K.; Amano, Y.; Jimbo, T. Cooperative Transportation using Multiple Single-Rotor Robots and Decentralized Control for Unknown Payloads. In Proceedings of the International Conference on Robotics and Automation (ICRA)), Philadelphia, PA, USA, 23–27 May 2022; pp. 2024–2030. Available online: https://ieeexplore.ieee.org/document/9811768 (accessed on 12 July 2022).
- Oishi, K.; Jimbo, T. Autonomous Cooperative Transportation System involving Multi-Aerial Robots with Variable Attachment Mechanism. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 6322–6328. Available online: https://ieeexplore.ieee.org/document/9636145 (accessed on 16 December 2021).
- Chen, T.; Shan, J.; Liu, H.H.T. Transportation of Payload Using Multiple Quadrotors via Rigid Connection. Int. J. Aerosp. Eng. 2022, 2022, 2486561. [Google Scholar] [CrossRef]
- Nguyen, H.N.; Park, S.; Lee, D. Aerial Tool Operation System using Quadrotors as Rotating Thrust Generators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1285–1291. Available online: https://ieeexplore.ieee.org/abstract/document/7353534 (accessed on 17 December 2015).
- Nguyen, H.; Park, S.; Park, J.; Lee, D. A Novel Robotic Platform for Aerial Manipulation Using Quadrotors as Rotating Thrust Generators. IEEE Trans. Robot. 2018, 34, 353–369. Available online: https://ieeexplore.ieee.org/document/8294249 (accessed on 28 February 2018). [CrossRef]
- Tagliabue, A.; Kamel, M.; Siegwart, R.; Nieto, J. Robust collaborative object transportation using multiple MAVs. Int. J. Robot. Res. 2019, 38, 1020–1044. [Google Scholar] [CrossRef]
- Mohammadi, M.; Franchi, A.; Barcelli, D.; Prattichizzo, D. Cooperative aerial tele-manipulation with haptic feedback. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea (South), 9–14 October 2016; pp. 5092–5098. Available online: https://ieeexplore.ieee.org/document/7759747 (accessed on 1 December 2016).
- Estevez, J.; Garate, G.; Lopez-Guede, J.M.; Larrea, M. Review of Aerial Transportation of Suspended-Cable Payloads with Quadrotors. Drones 2024, 8, 35. [Google Scholar] [CrossRef]
- Mohammadi, K.; Sirouspour, S.; Grivani, A. Passivity-Based Control of Multiple Quadrotors Carrying a Cable-Suspended Payload. IEEE/ASME Trans. Mechatronics 2022, 27, 2390–2400. Available online: https://ieeexplore.ieee.org/document/9508879 (accessed on 6 August 2021). [CrossRef]
- Erhart, S.; Hirche, S. Model and Analysis of the Interaction Dynamics in Cooperative Manipulation Tasks. IEEE Trans. Robot. 2016, 32, 672–683. Available online: https://ieeexplore.ieee.org/document/7480959 (accessed on 31 May 2016). [CrossRef]
- Ma, S.; Zong, X. Multi-UAV Cooperative Formation Flight Control System for Cascade Active Disturbance Rejection Control. In Proceedings of the 3rd International Conference on Electrical Engineering and Control Technologies (CEECT), Macau, China, 16–18 December 2021; pp. 93–97. Available online: https://ieeexplore.ieee.org/document/9672641 (accessed on 19 January 2022).
- Men, T.; Liu, D.; Zhu, X.; Fei, B.; Xiao, Z.; Xiao, W. Cooperative Localization Method of UAVs for a Persistent Surveillance Task. In Proceedings of the 7th International Conference on Big Data and Information Analytics (BigDIA), Chongqing, China, 29–31 October 2021; pp. 456–463. Available online: https://ieeexplore.ieee.org/document/9619751 (accessed on 6 December 2021).
- Pritzl, V.; Vrba, M.; Štĕpán, P.; Saska, M. Cooperative Navigation and Guidance of a Micro-Scale Aerial Vehicle by an Accompanying UAV using 3D LiDAR Relative Localization. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 526–535. Available online: https://ieeexplore.ieee.org/document/9836116 (accessed on 26 July 2022).
Figure 3.
Cooperative Aerial Manipulation of a Rod with Multi-DOF Robotic Arms: [87,92,93] (from left to right).

Figure 4.
Cooperative Aerial Transportation of a Flexible Object: [99,100,101] (from left to right).

Figure 5.
Ground–Air Cooperative Aerial Manipulation: [103,104,106,108,109] (from left to right, top to bottom).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Search criteria.
| Criteria | Data |
|---|---|
| Scientific Database | IEEE Xplore, Google Scholar, Science Direct, Engineering Village, arXiv, manual search |
| Publication Period | From 2010 to October 2023 |
| Keywords | (“aerial” OR “cooperative aerial” OR “survey” OR “review”) AND (“manipulation” OR “transportation” OR “load transportation”) |
Table 2.
Summarizing Table of Dynamic Modeling Approaches.
| Reference | Dynamic Modeling |
|---|---|
| Rigidly Attached | |
| [111,112,113,115,116,117,118] | Newton–Euler |
| [119] | Euler–Lagrange |
| Flexible object | |
| [99] | Newton–Euler |
| [101] | Euler–Lagrange |
| [100,102] | Euler–Bernoulli, Euler–Lagrange |
| Ground–Air | |
| [103,104,106,108,110] | Euler–Lagrange |
| [109] | Newton–Euler |
| Multi DoF-Arms | |
| [87,88,89,90,91,92,93,94,95] | Euler–Lagrange |
| [96] | Newton–Euler |
| [97,98] | Recursive Newton–Euler |
| Cable-Driven | |
| [49,50,52,55,60,62,65,67,68,81,85,86,121] | Newton–Euler |
| [21,53] | Kane method |
| [54,57,58,59,61,73,74,75,76,77,82,83] | Euler–Lagrange |
| [63,69,70] | Newton–Euler, Udwadia–Kalaba |
| [78,79] | Newton–Euler, Euler–Lagrange |
Table 3.
Summarizing Table of Cooperative Aerial Manipulation’s different categories.
| Ref. | Fixed/Tilted | Arms | Gripper Type | Platform | Implementation | UAV Weight | Payload Weight | Payload | Controller Design | Motion Planning Technique | Fully Autonomous | Experiment Task |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RIGIDLY ATTACHED | ||||||||||||
| [118] | Fixed | Gripper with spherical joint | Magnetic | Hexacopter | Outdoor experiment | 1 kg | 2.46 kg | Wooden structure | Admittance controller with force estimator | - | Onboard sensors | Transportation |
| [112] | Gripper | Quadcopter | Lab experiment | 610 gr | Carbon fiber rod | Non-Linear Controller | Onboard camera and IMU | |||||
| [111] | Penetrative | 500 gr | 320 gr | Wooden bar | Two norm optimal control, partially decentralized | - | Pick/Transportation | |||||
| [113] | - | Fixed position on the payload | Mono-rotor | 2.7 kg | Long rectangular object | Decentralized controller based ASSC | Transportation | |||||
| [114] | Variable attachment mechanism on the payload | 3.2 kg | Long rectangular object | Cascaded PID | ||||||||
| [119] | Passive tool | Adhesive tooltip | Quadcopter | Simulation with Hardware in the loop | 0.7 kg | 2.4 kg | Barrel | Haptic feedback control | Manipulation | |||
| [117] | Spherically connected frame with attached rigid tool | - | Lab experiment | 2.31 kg (3 quads) | 1.2 kg | Box | Dynamics-Based Control | Point-Contact/Push | ||||
| [115] | - | Magnets | 1.121 kg | 0.453 kg | Wooden board | Hierarchical control with command allocation | Transportation | |||||
| FLEXIBLE OBJECTS | ||||||||||||
| [99] | Fixed | - | Attached to the payload | Quadcopter | Lab experiment | 0.47 kg | 0.54 kg | Aluminum ring | LQR | - | Transportation | |
| [101] | Attached to the payload via magnets | Octocopter | 1.121 kg | Beam | LQR | |||||||
| [102] | Attached link to payload through passive rotational joint | Quadcopter | Simulation | Not reported | 0.61 kg | Wooden bar | Collaborative control with vibration suspension | Manipulation | ||||
| [100] | Tilted | Attached to the payload | Two-rotor | Lab experiment | Not reported | Aluminum bar | LQR | |||||
| GROUND-AIR | ||||||||||||
| [106] | Fixed | - | Attached to the payload | Birotor | Lab experiment | 100 gr | 30 gr | Carbon rod | PD | - | Manipulation | |
| [103] | Attached link to payload through passive rotational joint | Quadcopter | Not reported | 0.61 kg | Wooden bar | Augmented nonlinear with disturbance observer | ||||||
| [108] | 2-DOF arm (×1) | Gripper | Hexacopter | Not reported | Not reported | Plastic bar | Model Predictive Control | Manipulation/Transportation | ||||
| [104] | Tilted | 1-DOF arm (×1) with passive joint | Gripper (×2) | Indoor experiment | 2.48 kg | 1.42 kg | Rod | Centralized controller and haptic feedback | Pick/Manipulation | |||
| [110] | Fixed | Cable | - | Quadcopter | Outdoor experiment | 1.236 kg | 0.26 kg | Rod | Collaborative control | - | GPS, IMU, custom sensors system | Pick/Manipulation/Transportation |
| [109] | Hexacopter | Lab experiment | 4.05 kg | 1.12 kg | Bar | Visual Impedance control | Onboard camera and IMU | Manipulation/Transportation | ||||
| MULTI-DOF ARMS | ||||||||||||
| [87] | Fixed | 3-DOF arm (×1) | Connected to the object using ball joints | Hexacopter | Lab experiment | 3 kg | 500 gr | Rod | Robust controller with disturbance observer | - | Manipulation | |
| [91] | 2-DOF arm (×1) | Hook | Not reported | 150 gr | RRT* | - | ||||||
| [92] | 2-DOF arm (×1) | Gripper | 280 gr | Augmented adaptive sliding mode controller | RRT* with Bezier Curves and DMPs | - | ||||||
| [93] | 2-DOF arm (×1) | Rigidly attached | 280 gr | High-level augmented adaptive sliding mode controller and low-level robust controller with DOB | Learning-based PDMPs | - | ||||||
| [90] | 2-DOF arm (×1) | Gripper | 280 gr | Wooden rod | Adaptive controller | DMPs | RGB-D camera for object detection | |||||
| [94] | 2-DOF arm (×1) | Rigidly attached | 2.5 kg | 280 gr | Rod | Augmented adaptive sliding mode controller | Velocity and curvature constraints | - | ||||
| [95] | 2-DOF arm (×1) | Quadcopter | Simulation | Not reported | 50 gr | Rod/triangular object | Sliding mode controller with SOSM observer | |||||
| [88] | 2-DOF arm (×1) | 2 kg | 0.4 kg | Box/cylinder | Hierarchical with admittance force control | - | Push/Transportation | |||||
| [89] | 6-DOF arm (×1) | Gripper | Octocopter | 2.7 kg | 1 kg | Rod | Impedance control | - | - | Transportation | ||
| [98] | 2-DOF arm (×1) | Virtual extension | Quadcopter | Gazebo simulation | Not reported | Not reported | Not reported | Compliant controller | - | RGB-camera (visual feedback using markers) | Manipulation/Transportation | |
| [96] | Rigid extension | Rigidly attached | Simulation | 0.75 kg | 1.5 kg | Spherical object | Decentralized adaptive force control | - | Transportation | |||
| [97] | 2-DOF arm (×1) | Gripper | Gazebo simulation | 1.2 kg | 0.8 kg | Beam | Leader/Follower model-based force control | |||||
| CABLE-DRIVEN | ||||||||||||
| [49] | - | Quadcopter | Lab experiment | Not reported | 0.25 kg | Triangular object | PID | |||||
| [51] | 1.03 kg | 0.338 kg | Platform of carbon fiber bars | Robust controller | - | Lift/Manipulation/Transportation | ||||||
| [21] | Helicopter | Outdoor experiment | 12.5 kg | 4 kg | Camera | Orientation controller | - | IMU, GPS, Compass | Lift/Transportation | |||
| [57] | - | Magnetic grippers | Quadcopter | Lab experiment | 800 gr | 263 gr | Aluminum rod | LQR | - | Monocular camera, IMU | Pick/Transportation | |
| [70] | - | Simulation | 1 kg | 2.65 kg | Rectangular object | Distributed adaptive control | RRT* with B-Spline curve | - | Transportation | |||
| [69] | Outdoor experiment | Not reported | 1 kg | Box | Fixed-time ESO based output feedback control | - | IMU, GPS | Lift/Transportation | ||||
| [63] | Hexacopter | 2.3 kg | 2.2 kg | Cylindrical object | Passivity-based decentralized control | IMU, GNSS | ||||||
| [79] | - | Wrapping the cable around the object | Catenary quadcopter | Simulation | Not reported | 0.1 kg | Box | Adaptive control | - | Wrap and Pull/Lift/ Manipulation/Transportation | ||
| [64] | - | Attached grippers | Hexacopter | Outdoor experiment | 70 gr | Not reported | Beam | Model predictive control | RRTc | Camera, Rangefinder, GPS, Compass | Transportation | |
| [78] | Fixed | - | Reconfigurable quadcopter | Physical Simulation with human in the loop | Not reported | Rectangular object | Dual space control approach with tension distribution | - | Manipulation/Transportation | |||
| [62] | Quadcopter | Outdoor experiment | 1.282 kg | 0.815 kg | Custom built with hardware setup | Load-leading control | - | GPS, Compass | Lift/Manipulation/Transportation | |||
| [59] | Lab experiment | Not reported | 250 gr | Triangular object | Distributed vision-based control | Monocular camera, IMU | Manipulation | |||||
| [77] | Gazebo simulation | 2.02 kg | 1.0 kg | Cuboid object | Geometric control | - | Transportation | |||||
| [73] | Simulation | 0.755 kg | 0.4 kg | Spherical pendulum | ||||||||
| [74] | 1.5 kg | Rectangular box | ||||||||||
| [75] | 0.5 kg | Lift/Transportation | ||||||||||
| [76] | Lab experiment | 0.52 kg | Rod | Stabilization | ||||||||
| [80] | 400 gr | 400 gr | Cubic object | Incremental Nonlinear Dynamic Inversion controller and robust formation | Lift/Transportation/Manipulation | |||||||
| [65] | 1 kg | 0.9 kg | Custom | Distributed trajectory optimization control | Transportation | |||||||
| [81] | 500 gr | 575 gr | Aluminum bar | Adaptive control | Manipulation/Transportation | |||||||
| [67] | Simulation | 1 kg | 0.9 kg | Beam | Admittance controller | |||||||
| [56] | - | Carabiner-harness | Outdoor experiment | 1 kg | 3 kg | Custom built with hardware setup | Cascaded PID | GPS | Lift/Manipulation/Transportation | |||
| [82] | - | Lab experiment | 1.43 kg | 0.355 kg | Cargo | Nonlinear hierarchical controller | - | Cargo delivery | ||||
| [83] | 3-DOF arm (×1) | Gripper | Simulation | 1.2 kg (with manipulator) | 0.1 kg | Slung load | Null-Space-Based Adaptive Control | - | Transportation | |||
| [68] | - | Outdoor experiment | 1.46 kg | 1.5 kg | Rectangular aluminum frame | Collaborative Control | - | GPS, IMU | Lift/Transportation/Land | |||
| [121] | Lab experiment | 0.67 kg | 0.4 kg | Spherical object | Passivity-based control | - | Transportation | |||||
| [54] | Simulation | 1.15 kg | 0.5 kg | Spherical object | Sliding Mode-Adaptive PID control | |||||||
| [84] | - | Spherical Joint | Lab experiment | 1.18 kg and 80.4 kg structure | 2.5 kg | Box | - | Lift/Transportation | ||||
| [58] | - | Not reported | Rectangular bar | LQR | - | IMU, Camera, Ultrasound sensor | Transportation | |||||
| [61] | Outdoor experiment | 73 gr | 30 gr | Circular object | Linear controller with EKF-based estimator | IMU | ||||||
| [71] | Lab experiment | Not reported | 0.39 kg | Circular object | Estimation-based formation tracking control | Formation Planning | - | |||||
| [72] | 800 gr | 300 gr | Circular object | Backstepping force controller and force disturbance observer | - | IMU | ||||||
| [60] | Not reported | 232 gr | Triangular object | Nonlinear Model Predictive Control | - | Manipulation/Transportation | ||||||
| [85] | Not reported | Bar | Backstepping (leader), Switching Controller (follower) | Transportation | ||||||||
| [86] | 0.831 kg and 0.832 kg | 0.248 kg and 0.252 kg | Steel pipe | Force Coordination Control | Hovering/Transportation | |||||||
Table 4.
Comparing state-of-the-art control approaches.
| Ref. | Category | Control Technique | 3D Trajectories | Velocity–Accel. | Payload Tracking Precision | Payload Orientation | Tested Against Uncertainties | Tested Against Wind | Tested Outdoors | Robust Against Disturbances | Implem. Complexity |
|---|---|---|---|---|---|---|---|---|---|---|---|
| [81] | Cable-Driven | Adaptive | Yes | 1.6 m/s2 | Low | 2DoF | Yes | Yes | No | No | Low |
| [51] | H∞ | No | QS | High | 3DoF | Yes | No | No | No | Med | |
| [62] | Load-leading (Optimal) | No | QS | High | 3DoF | Yes | Yes | Yes | No | High | |
| [56] | Cascaded PID | No | 1 m/s | Low | No | Yes | No | Yes | No | Low | |
| [61] | Linear controller with EKF-based estimator | Yes | 1.4 m/s | Med | No | Yes | Yes | Yes | Yes | Med | |
| [72] | Backstepp. force control and force DO | Yes | QS | Med | No | Yes | Yes | No | Yes | High | |
| [69] | ESO | No | QS | Low | No | Yes | Yes | Yes | Yes | Med | |
| [121] | Passivity-based | No | QS | Low | No | Yes | Yes | No | Yes | Low | |
| [60] | MPC | No | <1 m/s | High | 6DoF | No | No | No | No | High | |
| [101] | Flexible Object | LQR | No | 0.13 m/s | Med | No | Yes | No | No | Yes | Low |
| [94] | Multi-DoF Arms | Augmented adaptive sliding mode | Yes | <1 m/s | Med | No | Yes | No | No | Yes | High |
| [109] | Human-UAV | Visual Impedance | No | 0.3 m/s | High | No | Yes | No | No | Yes | Med |
| [118] | Rigidly-Attached | Admittance with force estimation | No | <1 m/s | Med | No | Yes | Yes | Yes | Yes | Med |
| [115] | Hierarchical with command allocation | No | 0.1 m/s | High | No | No | No | No | No | High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Barakou, S.C.; Tzafestas, C.S.; Valavanis, K.P. A Review of Real-Time Implementable Cooperative Aerial Manipulation Systems. Drones 2024, 8, 196. https://doi.org/10.3390/drones8050196
AMA Style
Barakou SC, Tzafestas CS, Valavanis KP. A Review of Real-Time Implementable Cooperative Aerial Manipulation Systems. Drones. 2024; 8(5):196. https://doi.org/10.3390/drones8050196
Chicago/Turabian StyleBarakou, Stamatina C., Costas S. Tzafestas, and Kimon P. Valavanis. 2024. "A Review of Real-Time Implementable Cooperative Aerial Manipulation Systems" Drones 8, no. 5: 196. https://doi.org/10.3390/drones8050196